
包装機およびそれを備えた包装機システム
【課題】包装機の高さ寸法を小さくする
【解決手段】包装機は、緊張保持させたフィルムに商品を押し上げてフィルムの周縁部を商品の下側へと折り込むもので、可動載置台32と、リフト駆動部37とを備えている。商品は、可動載置台32の上端の載置面35aに載る。リフト駆動部37は、リフト前ポジションからリフト後ポジションへと可動載置台32を上昇させる。リフト駆動部37は、モータ40と、そのモータ40の回転力を上昇力に変えるリンク機構41を有しており、モータ40は、リフト前ポジションにある可動載置台32の支持ピン49aよりも高い位置に設けられている。
【解決手段】包装機は、緊張保持させたフィルムに商品を押し上げてフィルムの周縁部を商品の下側へと折り込むもので、可動載置台32と、リフト駆動部37とを備えている。商品は、可動載置台32の上端の載置面35aに載る。リフト駆動部37は、リフト前ポジションからリフト後ポジションへと可動載置台32を上昇させる。リフト駆動部37は、モータ40と、そのモータ40の回転力を上昇力に変えるリンク機構41を有しており、モータ40は、リフト前ポジションにある可動載置台32の支持ピン49aよりも高い位置に設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
包装機およびそれを備えた包装機システム、特に、緊張保持させたフィルムに下方から被包装物を押し上げてフィルムの周縁部を被包装物の下側へと折り込む包装機に関する。
【背景技術】
【0002】
従来、発泡スチロールなどを使ったトレーに収納された生鮮食料品等の被包装物をストレッチフィルムによって包装する装置が、ストレッチ包装機として知られている。このストレッチ包装機では、所定の幅を有するストレッチフィルムをトレーの大小に応じて所定の長さ寸法に切断するとともに、フィルムの幅方向の両側縁部を上下のベルト等から成る一対のフィーダにより保持しながらフィルムを包装ステーションに搬送し、包装ステーションでフィルム包装を施す。包装ステーションでは、搬送されてきて緊張保持されているフィルムに対してトレーに収納された商品(以下、被包装物という。)を押し上げ、被包装物をフィルムに密着させた状態でフィルムの周縁部をトレーの底面側に折り込む。これにより、被包装物がストレッチフィルムに包まれるので、その後トレー底面のフィルムにヒートシールを施して包装を完了させる。
【0003】
例えば、特許文献1(特開2003−335306号公報)の包装機では、フィルムに対して被包装物を押し上げるための昇降部(2a)やエレベータヘッド(2b)が設けられ、モータ(205)が下部に装備されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の特許文献1(特開2003−335306号公報)に開示されているような包装機は、普通、床面に包装機を設置したときに被包装物の投入や取り出しが出来るように設計されている。このため、被包装物の投入位置が包装機の下端から比較的離れた位置(高い位置)にあり、包装機の高さ寸法も大きくなっている。
【0005】
しかし、包装機が大きければ重量や使用材料、価格を落とすことが難しくなる傾向にある。
【0006】
本発明の課題は、高さ寸法が小さい包装機およびそれを備えた包装機システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る包装機は、緊張保持させたフィルムに下方から被包装物を押し上げ、フィルムの周縁部を左右方向および後方向から被包装物の下側へと折り込み、さらに、被包装物を前方向に排出させながらフィルムの周縁部を前方向から折り込むことで、被包装物の包装を行う。この包装機は、載置部と、リフト駆動部とを備えている。載置部は、被包装物が載る載置面を含んでいる。リフト駆動部は、リフト前ポジションからリフト後ポジションへと載置部を上昇させる。リフト前ポジションとは、緊張保持させているフィルムの下方に被包装物が位置するポジションである。リフト後ポジションへとは、被包装物がフィルムを押し上げているポジションである。また、リフト駆動部は、モータと、そのモータの回転力を載置部を上昇させる力に変えるリフト用変換機構とを有している。モータは、リフト前ポジションにある載置部よりも高い位置に設けられている。
【0008】
本発明では、モータを従前の包装機よりも高い位置に設け、リフト用変換機構でモータの回転力を上昇力に変えて載置部を上昇させる構成を採っている。したがって、本発明によれば、リフト前ポジションにある載置部よりも下方に、モータ設置のための余分な空間を確保する必要がなくなり、包装機の高さ寸法を抑えることができる。
【0009】
なお、搬入部をさらに備える包装機においては、その搬入部がリフト駆動部のモータを利用する構成を採ることが好ましい。搬入部は、使用者が包装前の被包装物を置く投入空間から、リフト前ポジションにある載置部の載置面の上へと、被包装物を移動させるものである。この搬入部が、リフト駆動部のモータの回転力を被包装物を移動させる力に変える搬入用変換機構を有する場合には、リフト駆動部のモータの力を搬入部で利用することができる。被包装物を置く投入空間とリフト前ポジションにある載置部の載置面の上方空間とが略同一の高さ位置にある場合、搬入用変換機構は、被包装物が水平移動するように、リフト駆動部のモータの回転力を水平方向のベクトルを持つ力に変換できることが好ましい。
【0010】
また、リフト用変換機構がリフト用リンク機構であり、そのリフト用リンク機構の一端が、載置部の下部にある支点に連結されている場合、以下の(1)〜(2)のいずれかの位置にモータが設けられていることが好ましい。
(1)リフト前ポジションにある載置部の支点よりも高い位置で、且つ、リフト後ポジションにある載置部の載置面よりも低い位置
(2)リフト前ポジションにある載置部の支点よりも高い位置で、且つ、リフト後ポジションにある載置部の支点よりも低い位置
さらに、上述の本発明に係る包装機に、操作ユニットおよび基本モジュールを組み合わせて、包装機システムとすることができる。ここでは、包装機が、少なくともモータを制御する制御部を備えている、操作ユニットは、操作用プログラムを有し、包装機の近傍に設置される。基本モジュールは、操作用プログラムの指令に基づき、包装機の制御部に動作指示を送る。ここでは、操作ユニットに入力された操作指示内容が、操作用プログラムによって指令に変えられ、その指令に基づいて基本モジュールが動作指示を包装機の制御部に送る。これにより、基本モジュールが司る手順に沿って包装機が動くようになる。
【0011】
基本モジュールは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールであることが好ましい。この場合、操作ユニットと包装機とを結ぶ通信手段を設けるだけで、包装機システムが実現される。
【発明の効果】
【0012】
本発明によれば、リフト前ポジションにある載置部よりも下方にモータ設置のための余分な空間を確保する必要がなくなり、包装機の高さ寸法を抑えることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るストレッチ包装機の正面図。
【図2】ストレッチ包装機の側面図。
【図3】ストレッチ包装機の上面図。
【図4】ストレッチ包装機およびそれを備えた包装機システムの制御ブロック図。
【図5】ストレッチ包装機の下部ユニットの側面図。
【図6】載置台のリフト前ポジションおよびリフト後ポジションとモータ位置とを示す図。
【図7】リフト用リンク機構の上面図。
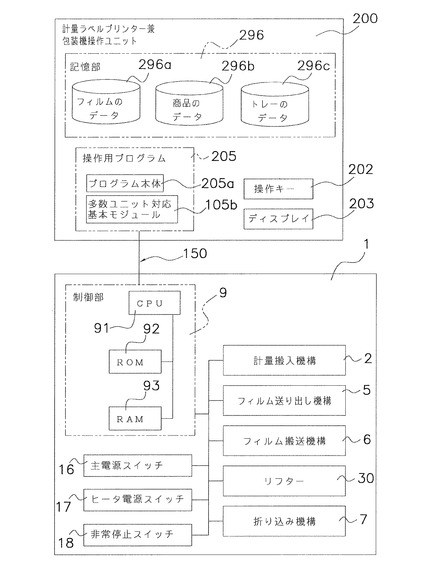
【図8】別の包装機操作ユニットを組み合わせた包装機システムの制御ブロック図。
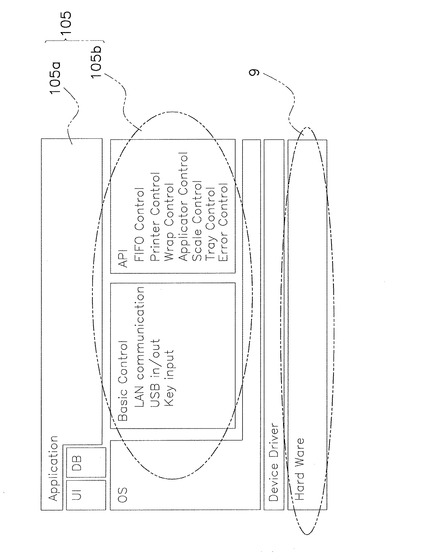
【図9】操作用プログラム等のハードウェア・ソフトウェア実装概念図。
【発明を実施するための形態】
【0014】
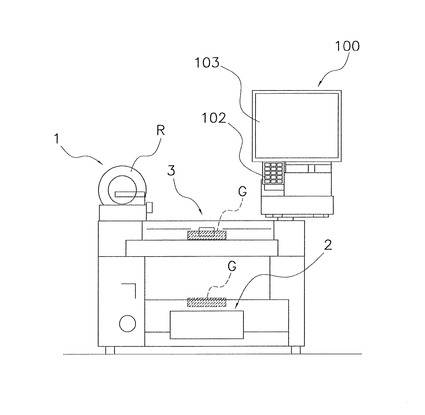
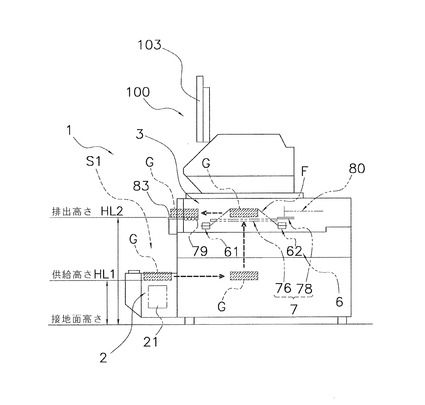
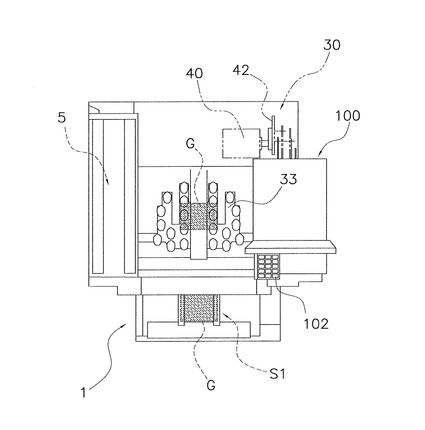
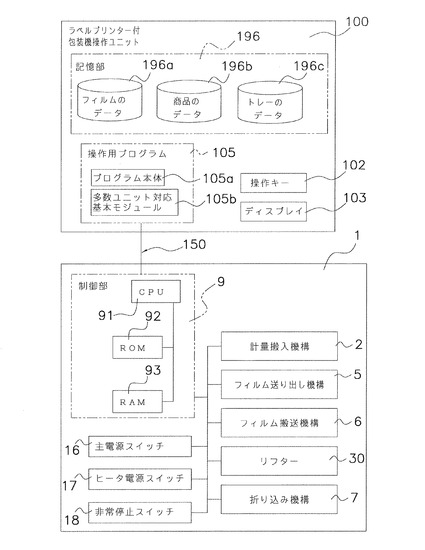
本発明の一実施形態に係るフィルム横送り型のストレッチ包装機を、図1〜図3に示す。この包装機1は、緊張保持させたストレッチフィルムF(図2参照)に対してトレーに載せた生鮮食料品等の商品Gを押し上げ、フィルムFの周縁部をトレーの下側に折り込むことによって、被包装物である商品Gのフィルム包装を行う装置である。また、この包装機1は、図4に示すように、ラベルプリンター付の包装機操作ユニット100と通信線150を介して接続され、包装機操作ユニット100とともに包装機システムを構築する。包装機操作ユニット100は、包装機1の計量器21(後述)から商品Gの重量値を入手し、重量や価格が印字されたラベルを生成する機能を有している。ユーザーは、このラベルを、排出台83(図2参照)に出てきたフィルム包装済みの商品Gに貼り付けることができる。
【0015】
<装置の全体概略>
図1〜図3に示すように、包装機1は、計量搬入装置2と、リフター30と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7とを備えている。
【0016】
計量搬入装置2は、包装機1の中央下部に設けられている。包装機1の左上部には、フィルムロールRが保持される。フィルムロールRの下方に配備されているフィルム送り出し機構5は、フィルムロールRからフィルムFを引き出し、包装機1の中央上部に向けてフィルムFを送り出す。フィルム搬送機構6は、フィルム送り出し機構5からフィルムFを受け取り、包装機1の中央上部へとフィルムFを搬送し、テンションをかけた状態でフィルムFを把持する。折り込み機構7は、フィルム搬送機構6が把持しているフィルムFによって商品Gを包み込むために、後述する折込板76〜78などで商品Gの下側にフィルムFを折り込む。
【0017】
上記の各機構の作動は、包装機1の制御部9(図4参照)により制御される。この制御部9と接続される包装機操作ユニット100は、包装機1の計量器21により計量された商品Gの重量を示す信号に基づいて商品Gの価格の算出等を行い商品Gの重量や価格等をラベルに印字するラベルプリンター機能やラベル発行機能を有している。また、包装機操作ユニット100は、テンキー方式の操作キー102や、タッチパネル式のディスプレイ103を備えている(図1〜図4参照)。ディスプレイ103には、操作ボタンも配される。包装機操作ユニット100には記憶部196も配備されており、記憶部196には、操作キー102やディスプレイ103から入力された、あるいは外部の装置から転送されたフィルムFに関するデータおよび商品Gに関するデータが記憶される。
【0018】
なお、この包装機1で使用するフィルムロールRは、ストレッチフィルムFが多重に巻き付けられているものである。
【0019】
<計量搬入装置>
計量搬入装置2は、トレーに収納された食品等の商品Gの重量を計量する計量器21、搬入部材、リンク機構25,26などを有している。搬入部材には搬送用の突起が設けられており、計量器21の上方にある投入空間S1に商品Gを図2に示すように載置すれば、商品Gの重量が計量器21により計量された後、商品Gが搬入部材の突起に押されて、リフター30(後述)の可動載置台32上に送られる。
【0020】
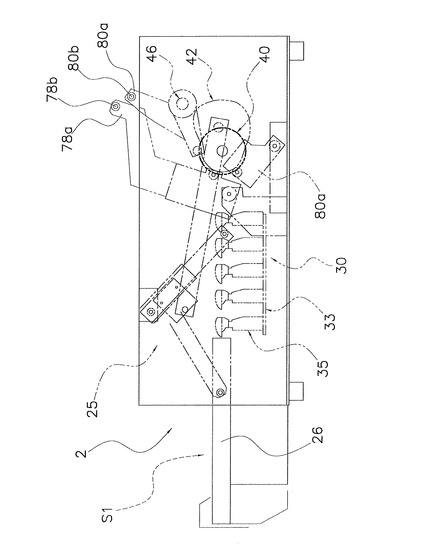
搬入部材は、図5に示す搬入用のリンク機構25,26を介して、後述するリフター30のモータ40の力で水平移動する。すなわち、搬入用のリンク機構25,26は、モータ40が回転させる後述のカム板42の動きに連動し、モータ40の回転力を、搬入部材を水平に移動させる力に変える。
【0021】
<リフター>
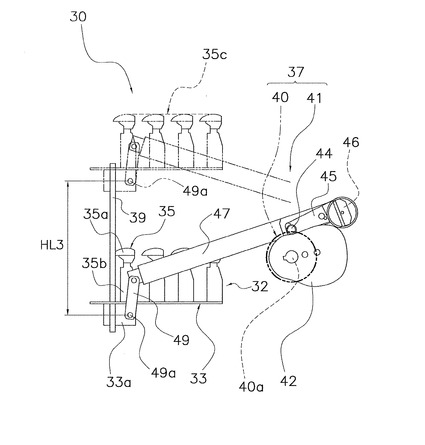
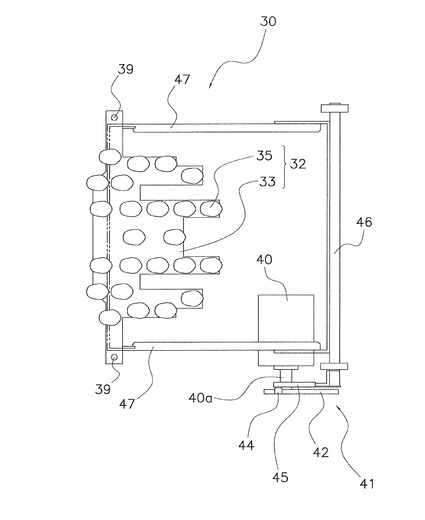
リフター30は、計量が終わった商品Gを、フィルム搬送機構6によって包装機1の中央上部において張られた状態で把持されているフィルムFに対して突き上げるための装置である。リフター30は、主として、支持ベース33と、支持ベース33上に固定された多数の載置部材35と、支持ベース33を上下移動させるリフト駆動部37とを備えている。支持ベース33と、多数の載置部材35とは、商品Gを載せて上下移動する可動載置台32を形成している(図6および図7参照)。
【0022】
多数の載置部材35は、基本的な構造は全て同じとなっている。載置部材35は、主として、ヘッド35aと、固定ポスト35bと、左右回動軸と、前後回動軸と、左右バネと、前後バネとから構成されており、ヘッド35aが固定ポスト35bに対して前後および左右に回動して倒れることができるようになっている。この載置部材35は、特開2004−262513号公報に開示されている載置部材と類似の構造である。
【0023】
支持ベース33は、図6に示すように、その左右端が垂直ガイド棒39に上下に貫かれており、垂直ガイド棒39に沿って上方および下方にのみ動けるようになっている。また、支持ベース33は、左右端部において下方に延びる垂直板33aを有している。これらの垂直板33aには、支持ピン49aが装着されている。この支持ピン49aを介して、垂直板33aには第1リンク部材49が取り付けられる。
【0024】
第1リンク部材49は、図6および図7に示すように、第2リンク部材47、基軸46、カムフォロア支持板45、カムフォロア44、カム板42などとともに、リンク機構41を形成している。リンク機構41は、支持ベース33を含む可動載置台32を上昇・下降させるためのリフト用のリンク機構である。モータ40の回転軸40aとカム板42とは互いに固着されており、カム板42の外周面は回転軸40aの周りを旋回する。カムフォロア44は、固定支点となる基軸46に固着されているカムフォロア支持板45の先端に軸支されており、カム板42が回転することで上方あるいは下方に移動する。カムフォロア支持板45の先端がカムフォロア44の動きに応じて旋回すると、第2リンク部材47も同じ角度だけ回動し(図6参照)、第1リンク部材49を介して支持ベース33および載置部材35が鉛直方向に沿って(垂直ガイド棒39に沿って)上昇・下降する。
【0025】
これらのリンク機構41およびモータ40が、可動載置台32(支持ベース33および載置部材35)を上下移動させるリフト駆動部37を構成している。
【0026】
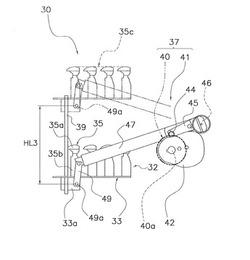
図6において、実線で示す支持ベース33および載置部材35は、リフト前ポジションの高さ位置にあり、二点鎖線で示す支持ベース33および載置部材35は、リフト後ポジションの高さ位置にある。リフト前とリフト後では、高さ位置がHL3だけ違う。ここでは、HL3=約210mmである。モータ40およびモータ40の回転軸40aの高さ位置は、リンク機構41の第1リンク部材49と支持ベース33の垂直板33aとを結ぶ支持ピン49aのリフト前の高さ位置とリフト後の高さ位置との間にある。言い換えれば、モータ40およびモータ40の回転軸40aは、リフト前ポジションにある支持ベース33の上面よりも高い位置に設けられていることになる。さらに言い換えれば、モータ40およびモータ40の回転軸40aが、リフト後ポジションにある支持ピン49aよりも低く、リフト後ポジションにある載置部材35の上端、すなわち、商品Gの載置面35c(図6参照)よりも低い位置にあることになる。
【0027】
<フィルム送り出し機構>
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを後述するフィルム搬送機構6の一対のクランプユニット61,62(図2参照)に受け渡すための機構である。
【0028】
<フィルム搬送機構>
フィルム搬送機構6は、フィルムロールRから上記フィルム送り出し機構5によって繰り出されたフィルムFを受け取って、包装機1の中央上部にフィルムFを搬送してフィルムFを把持する。このフィルム搬送機構6は、フィルム送り出し機構5の下部にフィルム繰り出しローラで構成されるもので、フィルムFを上下のベルトで挟み、フィーダ駆動モータの作動によってフィルムFを搬送する。
【0029】
なお、図示は省略しているが、第1および第2クランプユニット61,62は、複数のクランプを有している。これらのクランプは、ソレノイドによって作動し、フィルムFの把持および把持の解除を行う。クランプは、後述する左右折込板76および後ろ折込板78によってフィルムFの周縁部を商品Gの下側へと折り込ませるときの初期において、主としてフィルムFの前後を把持する役割を果たす。
【0030】
<折り込み機構>
折り込み機構7は、図2に示すように、主として、左右折込板76と、後ろ折込板78と、前折込棒79と、排出プッシャー80とから構成されている。
【0031】
左右折込板76は、フィルムFの周縁部の左右部分(フィルム搬送方向の両端部近傍部分)を商品Gの下側に折り込むもので、図示しないモータおよびタイミングベルトによって左右方向に水平移動が可能である。具体的には、左右折込板76は、リフター30に載った商品GがフィルムFを押し上げた状態において、商品Gと載置部材35のヘッド35aとの間に入り込み、左右方向に動いてフィルムFの周縁部を商品Gの下側へと折り込ませる。
【0032】
後ろ折込板78は、フィルムFの周縁部の後側部分を商品Gの下側に折り込むもので、リフト用のモータ40の力を利用して、前後方向に水平移動する。図5に示す折込板用カム支持板78aおよびピン78bは、後ろ折込板78を水平移動させるためのリンク機構である。また、排出プッシャー80は、前後に水平移動するもので、後ろ折込板78がフィルムFの周縁部の後側部分を商品Gの下側へと折り込ませた後に、商品Gを前方に移動させて、フィルムFの周縁部の前側部分を前折込棒79によって相対的に商品Gの下側へと折り込ませる。図5に示すプッシャー用カム支持板80aおよびピン80bは、排出プッシャー80を水平移動させるためのリンク機構である。この排出プッシャー80も、リフト用のモータ40の力を利用して動く。なお、包装機1は、大きく上下に二分割されており、図5に示すものは下半分の構造体である。この下半分の構造体には後ろ折込板78やプッシャー80が含まれないが、後ろ折込板78やプッシャー80を含む上半分の構造体が図5に示す下半分の構造体の上にセットされると、ピン78b、80bが後ろ折込板78やプッシャー80から延びるリンク部材(図示せず)に嵌合する。
【0033】
後ろ折込板78は、左右折込板76よりも上側に配置されており、平面的に左右折込板76に重なりながらフィルムFを商品Gの下側に折り込むことができる。具体的には、後ろ折込板78は、リフター30に載った商品GがフィルムFを押し上げた状態において、左右折込板76よりも高い位置において商品Gと載置部材35のヘッド35aとの間に入り込み、フィルムFの周縁部を前後方向に商品Gの下側へと折り込ませる。
【0034】
前折込棒79は、商品Gを排出台83に向けて押し出す排出プッシャー80による商品Gの排出時において、フィルムFの周縁部の前側部分(第1クランプユニット61側の側部近傍部分)が商品Gの下側に折り込まれるように、図2に示すように配置されている。
【0035】
<制御部>
包装機1の制御部9は、図4に示すように構成されており、各機構2,5,6,30,7の各動作を制御する。制御部9は、CPU91、ROM92、RAM93などを有している。主電源スイッチ16、ヒータ電源スイッチ17、非常停止スイッチ18などからの入力も、制御部9に伝達される。
【0036】
<包装機とともに包装機システムを構成するラベルプリンター付包装機操作ユニット>
ラベルプリンター付の包装機操作ユニット100は、包装機1の計量器21から商品Gの計量データを入手して重量や価格が印字されたラベルを生成する機能と、包装機1を操作する機能とを兼ね備えている。この包装機操作ユニット100は、操作キー102やディスプレイ103の他、記憶部196を有している。記憶部196には、フィルムデータファイル196aと、商品データファイル196bと、トレーデータファイル196cとが収納されている。フィルムデータファイル196aには、複数種類のフィルムFの性状に関するデータが、フィルムFの種類ごとに記憶されている。商品データファイル196bには、商品Gの単価データや商品Gの性状に関するデータが、商品Gの種類ごとに記憶されている。トレーデータファイル196cには、トレーの性状に関するデータが、トレーの種類ごとに記憶されている。
【0037】
また、包装機操作ユニット100内では、操作用プログラム105が、図示しないCPUやRAMなどによって動いている。操作用プログラム105は、プログラム本体105aと、多数ユニット対応の基本モジュール105bとから成っている。多数ユニット対応の基本モジュール105bは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールである。したがって、例えば図8に示すように、包装機操作ユニット100に代えて、計量ラベルプリンター兼包装機操作ユニットであるユニット200を包装機1に組み合わせて包装機システムを構成する場合にも、そのユニット200の操作用プログラム205に同じ基本モジュール105bを組み込むことで、包装機1を適切に制御できるようになる。操作用プログラム205ではプログラム本体205bが操作ユニット100とは異なるものとなるが、基本モジュール105bは、操作用プログラム105にも操作用プログラム205にも組み込めるようなモジュールとなっている。
【0038】
図9に、包装機1の制御部9に指令を送る基本モジュール105bおよび操作受付を行う操作用プログラム105のハードウェア・ソフトウェア実装概念図を示す。基本モジュール105bは、基本機能としてLAN接続、USBのイン・アウト、キー入力を備え、APIとして各種制御機能を備えている。APIでは、例えば、計量器21のゼロ点調整機能(Scale Control)や包装動作開始機能(Wrap Control)を備えている。基本モジュール105bから包装機1の制御部9へとゼロ点調整を行わせる指令が送られると、制御部9からは例えばエラー信号が返ってくる。基本モジュール105bから包装機1の制御部9へと包装動作開始の指令が送られると、制御部9からは成功あるいは失敗の信号が返される。
【0039】
<本実施形態の包装機の特徴>
(1)
包装機1は、緊張保持させたフィルムFに下方から被包装物である商品Gを押し上げ、フィルムFの周縁部を左右方向および後方向から商品Gの下側へと折り込み、さらに、商品Gを前方向に排出させながらフィルムFの周縁部を前方向から折り込むことで、商品Gの包装を行うものとなっている。また、包装機1は、商品Gが載る載置面35c(図6参照)を持つ可動載置台32と、その可動載置台32をリフト前ポジションからリフト後ポジションへと上昇させるリフター30とを備えている。そして、リフター30は、モータ40と、そのモータ40の回転力を上昇力に変えるリフト用のリンク機構41とを有している。
【0040】
ここでは、モータ40およびモータ40の回転軸40aの高さ位置を、リンク機構41の第1リンク部材49と可動載置台32の垂直板33aとを結ぶ支持ピン49aのリフト前の高さ位置とリフト後の高さ位置との間にセットしている。言い換えれば、モータ40およびモータ40の回転軸40aを、リフト前ポジションにある可動載置台32の支持ベース33や支持ピン49aよりも高い位置に設けている。このため、リフト前ポジションにある支持ベース33よりも下方に、モータ40を設置するための余分な空間を確保する必要がなくなり、包装機1の高さ寸法を小さく抑えることができている。
【0041】
具体的には、図2に示すように、包装機1の接地面高さから供給高さ(商品Gを投入する空間S1における商品Gを載置する面の高さ)までの距離HL1が約150mmに抑えられ、排出高さ(商品Gをユーザーが取り出す排出台83の上面の高さ)HL2が約360mmに抑えられている。
【0042】
(2)
包装機1では、計量搬入装置2の搬入部材を移動させる力も、リフター30の可動載置台32(載置部材35および支持ベース33)を上昇させる力も、同じモータ40から生み出している。それぞれ搬入用のリンク機構25,26、リフト用のリンク機構41によって、回転力を上昇力や水平移動力に変えている。さらには、モータ40の力を使って、後ろ折込板78や排出プッシャー80も動かしている。ここでは、モータ40をリフト前ポジションにある可動載置台32の支持ピン49aよりも高い位置に設けているため、モータ40から計量搬入装置2の搬入部材、後ろ折込板78、排出プッシャー80がそれぞれ近い場所に位置し、各リンク機構等の構造を簡易且つ小さくすることができている。
【0043】
(3)
包装機1および包装機操作ユニット100から成る本実施形態に係る包装機システムでは、包装機操作ユニット100が操作用プログラム105を有し、それに組み込まれる基本モジュール105bが、操作用プログラム105の指令に基づいて、包装機1の制御部9に動作指示を送っている。すなわち、ここでは、包装機操作ユニット100に入力された操作指示内容が、操作用プログラム105によって指令に変えられ、その指令に基づいて基本モジュール105bが動作指示を包装機1の制御部9に送っている。これにより、基本モジュール105bが司る手順に沿って包装機1が動くようになる。
【0044】
なお、基本モジュール105bは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールである。したがって、操作ユニット100,200と包装機1とを結ぶ通信線150を設けるだけで、包装機システムが実現される。
【0045】
<本実施形態の包装機の変形例>
(A)
上記の実施形態では、モータ40の回転力をリフト用のリンク機構41によって可動載置台32を上昇させる力に変えているが、モータ40の回転力を、ラックアンドピニオン機構やボールネジ機構などによって直線力に変換し、可動載置台32を上下させるようにしてもよい。
【0046】
また、搬入用のリンク機構25,26についても、リンク機構以外の変換機構を用いてモータ40の回転力を水平移動力に変えることができる。
【0047】
(B)
上記実施形態では、操作ユニット100,200と包装機1とを通信線150で結んでいるが、通信線150ではなく無線通信手段を用いて結んでもよい。すなわち、有線で結んでも無線で結んでもよい。
【符号の説明】
【0048】
1 包装機
2 計量搬入装置(搬入部)
9 制御部
32 可動載置台(載置部)
33 支持ベース
35 載置部材
35c 載置面
37 リフト駆動部
40 モータ
41 リフト用のリンク機構(リフト用変換機構)
49a 支持ピン(載置部の下部にある支点)
100 包装機操作ユニット
105 操作用プログラム
105b 多数ユニット対応の基本モジュール
150 通信線(通信手段)
200 包装機操作ユニット
205 操作用プログラム
【先行技術文献】
【特許文献】
【0049】
【特許文献1】特開2003−335306号公報
【技術分野】
【0001】
包装機およびそれを備えた包装機システム、特に、緊張保持させたフィルムに下方から被包装物を押し上げてフィルムの周縁部を被包装物の下側へと折り込む包装機に関する。
【背景技術】
【0002】
従来、発泡スチロールなどを使ったトレーに収納された生鮮食料品等の被包装物をストレッチフィルムによって包装する装置が、ストレッチ包装機として知られている。このストレッチ包装機では、所定の幅を有するストレッチフィルムをトレーの大小に応じて所定の長さ寸法に切断するとともに、フィルムの幅方向の両側縁部を上下のベルト等から成る一対のフィーダにより保持しながらフィルムを包装ステーションに搬送し、包装ステーションでフィルム包装を施す。包装ステーションでは、搬送されてきて緊張保持されているフィルムに対してトレーに収納された商品(以下、被包装物という。)を押し上げ、被包装物をフィルムに密着させた状態でフィルムの周縁部をトレーの底面側に折り込む。これにより、被包装物がストレッチフィルムに包まれるので、その後トレー底面のフィルムにヒートシールを施して包装を完了させる。
【0003】
例えば、特許文献1(特開2003−335306号公報)の包装機では、フィルムに対して被包装物を押し上げるための昇降部(2a)やエレベータヘッド(2b)が設けられ、モータ(205)が下部に装備されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の特許文献1(特開2003−335306号公報)に開示されているような包装機は、普通、床面に包装機を設置したときに被包装物の投入や取り出しが出来るように設計されている。このため、被包装物の投入位置が包装機の下端から比較的離れた位置(高い位置)にあり、包装機の高さ寸法も大きくなっている。
【0005】
しかし、包装機が大きければ重量や使用材料、価格を落とすことが難しくなる傾向にある。
【0006】
本発明の課題は、高さ寸法が小さい包装機およびそれを備えた包装機システムを提供することにある。
【課題を解決するための手段】
【0007】
本発明に係る包装機は、緊張保持させたフィルムに下方から被包装物を押し上げ、フィルムの周縁部を左右方向および後方向から被包装物の下側へと折り込み、さらに、被包装物を前方向に排出させながらフィルムの周縁部を前方向から折り込むことで、被包装物の包装を行う。この包装機は、載置部と、リフト駆動部とを備えている。載置部は、被包装物が載る載置面を含んでいる。リフト駆動部は、リフト前ポジションからリフト後ポジションへと載置部を上昇させる。リフト前ポジションとは、緊張保持させているフィルムの下方に被包装物が位置するポジションである。リフト後ポジションへとは、被包装物がフィルムを押し上げているポジションである。また、リフト駆動部は、モータと、そのモータの回転力を載置部を上昇させる力に変えるリフト用変換機構とを有している。モータは、リフト前ポジションにある載置部よりも高い位置に設けられている。
【0008】
本発明では、モータを従前の包装機よりも高い位置に設け、リフト用変換機構でモータの回転力を上昇力に変えて載置部を上昇させる構成を採っている。したがって、本発明によれば、リフト前ポジションにある載置部よりも下方に、モータ設置のための余分な空間を確保する必要がなくなり、包装機の高さ寸法を抑えることができる。
【0009】
なお、搬入部をさらに備える包装機においては、その搬入部がリフト駆動部のモータを利用する構成を採ることが好ましい。搬入部は、使用者が包装前の被包装物を置く投入空間から、リフト前ポジションにある載置部の載置面の上へと、被包装物を移動させるものである。この搬入部が、リフト駆動部のモータの回転力を被包装物を移動させる力に変える搬入用変換機構を有する場合には、リフト駆動部のモータの力を搬入部で利用することができる。被包装物を置く投入空間とリフト前ポジションにある載置部の載置面の上方空間とが略同一の高さ位置にある場合、搬入用変換機構は、被包装物が水平移動するように、リフト駆動部のモータの回転力を水平方向のベクトルを持つ力に変換できることが好ましい。
【0010】
また、リフト用変換機構がリフト用リンク機構であり、そのリフト用リンク機構の一端が、載置部の下部にある支点に連結されている場合、以下の(1)〜(2)のいずれかの位置にモータが設けられていることが好ましい。
(1)リフト前ポジションにある載置部の支点よりも高い位置で、且つ、リフト後ポジションにある載置部の載置面よりも低い位置
(2)リフト前ポジションにある載置部の支点よりも高い位置で、且つ、リフト後ポジションにある載置部の支点よりも低い位置
さらに、上述の本発明に係る包装機に、操作ユニットおよび基本モジュールを組み合わせて、包装機システムとすることができる。ここでは、包装機が、少なくともモータを制御する制御部を備えている、操作ユニットは、操作用プログラムを有し、包装機の近傍に設置される。基本モジュールは、操作用プログラムの指令に基づき、包装機の制御部に動作指示を送る。ここでは、操作ユニットに入力された操作指示内容が、操作用プログラムによって指令に変えられ、その指令に基づいて基本モジュールが動作指示を包装機の制御部に送る。これにより、基本モジュールが司る手順に沿って包装機が動くようになる。
【0011】
基本モジュールは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールであることが好ましい。この場合、操作ユニットと包装機とを結ぶ通信手段を設けるだけで、包装機システムが実現される。
【発明の効果】
【0012】
本発明によれば、リフト前ポジションにある載置部よりも下方にモータ設置のための余分な空間を確保する必要がなくなり、包装機の高さ寸法を抑えることができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係るストレッチ包装機の正面図。
【図2】ストレッチ包装機の側面図。
【図3】ストレッチ包装機の上面図。
【図4】ストレッチ包装機およびそれを備えた包装機システムの制御ブロック図。
【図5】ストレッチ包装機の下部ユニットの側面図。
【図6】載置台のリフト前ポジションおよびリフト後ポジションとモータ位置とを示す図。
【図7】リフト用リンク機構の上面図。
【図8】別の包装機操作ユニットを組み合わせた包装機システムの制御ブロック図。
【図9】操作用プログラム等のハードウェア・ソフトウェア実装概念図。
【発明を実施するための形態】
【0014】
本発明の一実施形態に係るフィルム横送り型のストレッチ包装機を、図1〜図3に示す。この包装機1は、緊張保持させたストレッチフィルムF(図2参照)に対してトレーに載せた生鮮食料品等の商品Gを押し上げ、フィルムFの周縁部をトレーの下側に折り込むことによって、被包装物である商品Gのフィルム包装を行う装置である。また、この包装機1は、図4に示すように、ラベルプリンター付の包装機操作ユニット100と通信線150を介して接続され、包装機操作ユニット100とともに包装機システムを構築する。包装機操作ユニット100は、包装機1の計量器21(後述)から商品Gの重量値を入手し、重量や価格が印字されたラベルを生成する機能を有している。ユーザーは、このラベルを、排出台83(図2参照)に出てきたフィルム包装済みの商品Gに貼り付けることができる。
【0015】
<装置の全体概略>
図1〜図3に示すように、包装機1は、計量搬入装置2と、リフター30と、フィルム送り出し機構5と、フィルム搬送機構6と、折り込み機構7とを備えている。
【0016】
計量搬入装置2は、包装機1の中央下部に設けられている。包装機1の左上部には、フィルムロールRが保持される。フィルムロールRの下方に配備されているフィルム送り出し機構5は、フィルムロールRからフィルムFを引き出し、包装機1の中央上部に向けてフィルムFを送り出す。フィルム搬送機構6は、フィルム送り出し機構5からフィルムFを受け取り、包装機1の中央上部へとフィルムFを搬送し、テンションをかけた状態でフィルムFを把持する。折り込み機構7は、フィルム搬送機構6が把持しているフィルムFによって商品Gを包み込むために、後述する折込板76〜78などで商品Gの下側にフィルムFを折り込む。
【0017】
上記の各機構の作動は、包装機1の制御部9(図4参照)により制御される。この制御部9と接続される包装機操作ユニット100は、包装機1の計量器21により計量された商品Gの重量を示す信号に基づいて商品Gの価格の算出等を行い商品Gの重量や価格等をラベルに印字するラベルプリンター機能やラベル発行機能を有している。また、包装機操作ユニット100は、テンキー方式の操作キー102や、タッチパネル式のディスプレイ103を備えている(図1〜図4参照)。ディスプレイ103には、操作ボタンも配される。包装機操作ユニット100には記憶部196も配備されており、記憶部196には、操作キー102やディスプレイ103から入力された、あるいは外部の装置から転送されたフィルムFに関するデータおよび商品Gに関するデータが記憶される。
【0018】
なお、この包装機1で使用するフィルムロールRは、ストレッチフィルムFが多重に巻き付けられているものである。
【0019】
<計量搬入装置>
計量搬入装置2は、トレーに収納された食品等の商品Gの重量を計量する計量器21、搬入部材、リンク機構25,26などを有している。搬入部材には搬送用の突起が設けられており、計量器21の上方にある投入空間S1に商品Gを図2に示すように載置すれば、商品Gの重量が計量器21により計量された後、商品Gが搬入部材の突起に押されて、リフター30(後述)の可動載置台32上に送られる。
【0020】
搬入部材は、図5に示す搬入用のリンク機構25,26を介して、後述するリフター30のモータ40の力で水平移動する。すなわち、搬入用のリンク機構25,26は、モータ40が回転させる後述のカム板42の動きに連動し、モータ40の回転力を、搬入部材を水平に移動させる力に変える。
【0021】
<リフター>
リフター30は、計量が終わった商品Gを、フィルム搬送機構6によって包装機1の中央上部において張られた状態で把持されているフィルムFに対して突き上げるための装置である。リフター30は、主として、支持ベース33と、支持ベース33上に固定された多数の載置部材35と、支持ベース33を上下移動させるリフト駆動部37とを備えている。支持ベース33と、多数の載置部材35とは、商品Gを載せて上下移動する可動載置台32を形成している(図6および図7参照)。
【0022】
多数の載置部材35は、基本的な構造は全て同じとなっている。載置部材35は、主として、ヘッド35aと、固定ポスト35bと、左右回動軸と、前後回動軸と、左右バネと、前後バネとから構成されており、ヘッド35aが固定ポスト35bに対して前後および左右に回動して倒れることができるようになっている。この載置部材35は、特開2004−262513号公報に開示されている載置部材と類似の構造である。
【0023】
支持ベース33は、図6に示すように、その左右端が垂直ガイド棒39に上下に貫かれており、垂直ガイド棒39に沿って上方および下方にのみ動けるようになっている。また、支持ベース33は、左右端部において下方に延びる垂直板33aを有している。これらの垂直板33aには、支持ピン49aが装着されている。この支持ピン49aを介して、垂直板33aには第1リンク部材49が取り付けられる。
【0024】
第1リンク部材49は、図6および図7に示すように、第2リンク部材47、基軸46、カムフォロア支持板45、カムフォロア44、カム板42などとともに、リンク機構41を形成している。リンク機構41は、支持ベース33を含む可動載置台32を上昇・下降させるためのリフト用のリンク機構である。モータ40の回転軸40aとカム板42とは互いに固着されており、カム板42の外周面は回転軸40aの周りを旋回する。カムフォロア44は、固定支点となる基軸46に固着されているカムフォロア支持板45の先端に軸支されており、カム板42が回転することで上方あるいは下方に移動する。カムフォロア支持板45の先端がカムフォロア44の動きに応じて旋回すると、第2リンク部材47も同じ角度だけ回動し(図6参照)、第1リンク部材49を介して支持ベース33および載置部材35が鉛直方向に沿って(垂直ガイド棒39に沿って)上昇・下降する。
【0025】
これらのリンク機構41およびモータ40が、可動載置台32(支持ベース33および載置部材35)を上下移動させるリフト駆動部37を構成している。
【0026】
図6において、実線で示す支持ベース33および載置部材35は、リフト前ポジションの高さ位置にあり、二点鎖線で示す支持ベース33および載置部材35は、リフト後ポジションの高さ位置にある。リフト前とリフト後では、高さ位置がHL3だけ違う。ここでは、HL3=約210mmである。モータ40およびモータ40の回転軸40aの高さ位置は、リンク機構41の第1リンク部材49と支持ベース33の垂直板33aとを結ぶ支持ピン49aのリフト前の高さ位置とリフト後の高さ位置との間にある。言い換えれば、モータ40およびモータ40の回転軸40aは、リフト前ポジションにある支持ベース33の上面よりも高い位置に設けられていることになる。さらに言い換えれば、モータ40およびモータ40の回転軸40aが、リフト後ポジションにある支持ピン49aよりも低く、リフト後ポジションにある載置部材35の上端、すなわち、商品Gの載置面35c(図6参照)よりも低い位置にあることになる。
【0027】
<フィルム送り出し機構>
フィルム送り出し機構5は、フィルムロールRから引き出されたフィルムFを後述するフィルム搬送機構6の一対のクランプユニット61,62(図2参照)に受け渡すための機構である。
【0028】
<フィルム搬送機構>
フィルム搬送機構6は、フィルムロールRから上記フィルム送り出し機構5によって繰り出されたフィルムFを受け取って、包装機1の中央上部にフィルムFを搬送してフィルムFを把持する。このフィルム搬送機構6は、フィルム送り出し機構5の下部にフィルム繰り出しローラで構成されるもので、フィルムFを上下のベルトで挟み、フィーダ駆動モータの作動によってフィルムFを搬送する。
【0029】
なお、図示は省略しているが、第1および第2クランプユニット61,62は、複数のクランプを有している。これらのクランプは、ソレノイドによって作動し、フィルムFの把持および把持の解除を行う。クランプは、後述する左右折込板76および後ろ折込板78によってフィルムFの周縁部を商品Gの下側へと折り込ませるときの初期において、主としてフィルムFの前後を把持する役割を果たす。
【0030】
<折り込み機構>
折り込み機構7は、図2に示すように、主として、左右折込板76と、後ろ折込板78と、前折込棒79と、排出プッシャー80とから構成されている。
【0031】
左右折込板76は、フィルムFの周縁部の左右部分(フィルム搬送方向の両端部近傍部分)を商品Gの下側に折り込むもので、図示しないモータおよびタイミングベルトによって左右方向に水平移動が可能である。具体的には、左右折込板76は、リフター30に載った商品GがフィルムFを押し上げた状態において、商品Gと載置部材35のヘッド35aとの間に入り込み、左右方向に動いてフィルムFの周縁部を商品Gの下側へと折り込ませる。
【0032】
後ろ折込板78は、フィルムFの周縁部の後側部分を商品Gの下側に折り込むもので、リフト用のモータ40の力を利用して、前後方向に水平移動する。図5に示す折込板用カム支持板78aおよびピン78bは、後ろ折込板78を水平移動させるためのリンク機構である。また、排出プッシャー80は、前後に水平移動するもので、後ろ折込板78がフィルムFの周縁部の後側部分を商品Gの下側へと折り込ませた後に、商品Gを前方に移動させて、フィルムFの周縁部の前側部分を前折込棒79によって相対的に商品Gの下側へと折り込ませる。図5に示すプッシャー用カム支持板80aおよびピン80bは、排出プッシャー80を水平移動させるためのリンク機構である。この排出プッシャー80も、リフト用のモータ40の力を利用して動く。なお、包装機1は、大きく上下に二分割されており、図5に示すものは下半分の構造体である。この下半分の構造体には後ろ折込板78やプッシャー80が含まれないが、後ろ折込板78やプッシャー80を含む上半分の構造体が図5に示す下半分の構造体の上にセットされると、ピン78b、80bが後ろ折込板78やプッシャー80から延びるリンク部材(図示せず)に嵌合する。
【0033】
後ろ折込板78は、左右折込板76よりも上側に配置されており、平面的に左右折込板76に重なりながらフィルムFを商品Gの下側に折り込むことができる。具体的には、後ろ折込板78は、リフター30に載った商品GがフィルムFを押し上げた状態において、左右折込板76よりも高い位置において商品Gと載置部材35のヘッド35aとの間に入り込み、フィルムFの周縁部を前後方向に商品Gの下側へと折り込ませる。
【0034】
前折込棒79は、商品Gを排出台83に向けて押し出す排出プッシャー80による商品Gの排出時において、フィルムFの周縁部の前側部分(第1クランプユニット61側の側部近傍部分)が商品Gの下側に折り込まれるように、図2に示すように配置されている。
【0035】
<制御部>
包装機1の制御部9は、図4に示すように構成されており、各機構2,5,6,30,7の各動作を制御する。制御部9は、CPU91、ROM92、RAM93などを有している。主電源スイッチ16、ヒータ電源スイッチ17、非常停止スイッチ18などからの入力も、制御部9に伝達される。
【0036】
<包装機とともに包装機システムを構成するラベルプリンター付包装機操作ユニット>
ラベルプリンター付の包装機操作ユニット100は、包装機1の計量器21から商品Gの計量データを入手して重量や価格が印字されたラベルを生成する機能と、包装機1を操作する機能とを兼ね備えている。この包装機操作ユニット100は、操作キー102やディスプレイ103の他、記憶部196を有している。記憶部196には、フィルムデータファイル196aと、商品データファイル196bと、トレーデータファイル196cとが収納されている。フィルムデータファイル196aには、複数種類のフィルムFの性状に関するデータが、フィルムFの種類ごとに記憶されている。商品データファイル196bには、商品Gの単価データや商品Gの性状に関するデータが、商品Gの種類ごとに記憶されている。トレーデータファイル196cには、トレーの性状に関するデータが、トレーの種類ごとに記憶されている。
【0037】
また、包装機操作ユニット100内では、操作用プログラム105が、図示しないCPUやRAMなどによって動いている。操作用プログラム105は、プログラム本体105aと、多数ユニット対応の基本モジュール105bとから成っている。多数ユニット対応の基本モジュール105bは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールである。したがって、例えば図8に示すように、包装機操作ユニット100に代えて、計量ラベルプリンター兼包装機操作ユニットであるユニット200を包装機1に組み合わせて包装機システムを構成する場合にも、そのユニット200の操作用プログラム205に同じ基本モジュール105bを組み込むことで、包装機1を適切に制御できるようになる。操作用プログラム205ではプログラム本体205bが操作ユニット100とは異なるものとなるが、基本モジュール105bは、操作用プログラム105にも操作用プログラム205にも組み込めるようなモジュールとなっている。
【0038】
図9に、包装機1の制御部9に指令を送る基本モジュール105bおよび操作受付を行う操作用プログラム105のハードウェア・ソフトウェア実装概念図を示す。基本モジュール105bは、基本機能としてLAN接続、USBのイン・アウト、キー入力を備え、APIとして各種制御機能を備えている。APIでは、例えば、計量器21のゼロ点調整機能(Scale Control)や包装動作開始機能(Wrap Control)を備えている。基本モジュール105bから包装機1の制御部9へとゼロ点調整を行わせる指令が送られると、制御部9からは例えばエラー信号が返ってくる。基本モジュール105bから包装機1の制御部9へと包装動作開始の指令が送られると、制御部9からは成功あるいは失敗の信号が返される。
【0039】
<本実施形態の包装機の特徴>
(1)
包装機1は、緊張保持させたフィルムFに下方から被包装物である商品Gを押し上げ、フィルムFの周縁部を左右方向および後方向から商品Gの下側へと折り込み、さらに、商品Gを前方向に排出させながらフィルムFの周縁部を前方向から折り込むことで、商品Gの包装を行うものとなっている。また、包装機1は、商品Gが載る載置面35c(図6参照)を持つ可動載置台32と、その可動載置台32をリフト前ポジションからリフト後ポジションへと上昇させるリフター30とを備えている。そして、リフター30は、モータ40と、そのモータ40の回転力を上昇力に変えるリフト用のリンク機構41とを有している。
【0040】
ここでは、モータ40およびモータ40の回転軸40aの高さ位置を、リンク機構41の第1リンク部材49と可動載置台32の垂直板33aとを結ぶ支持ピン49aのリフト前の高さ位置とリフト後の高さ位置との間にセットしている。言い換えれば、モータ40およびモータ40の回転軸40aを、リフト前ポジションにある可動載置台32の支持ベース33や支持ピン49aよりも高い位置に設けている。このため、リフト前ポジションにある支持ベース33よりも下方に、モータ40を設置するための余分な空間を確保する必要がなくなり、包装機1の高さ寸法を小さく抑えることができている。
【0041】
具体的には、図2に示すように、包装機1の接地面高さから供給高さ(商品Gを投入する空間S1における商品Gを載置する面の高さ)までの距離HL1が約150mmに抑えられ、排出高さ(商品Gをユーザーが取り出す排出台83の上面の高さ)HL2が約360mmに抑えられている。
【0042】
(2)
包装機1では、計量搬入装置2の搬入部材を移動させる力も、リフター30の可動載置台32(載置部材35および支持ベース33)を上昇させる力も、同じモータ40から生み出している。それぞれ搬入用のリンク機構25,26、リフト用のリンク機構41によって、回転力を上昇力や水平移動力に変えている。さらには、モータ40の力を使って、後ろ折込板78や排出プッシャー80も動かしている。ここでは、モータ40をリフト前ポジションにある可動載置台32の支持ピン49aよりも高い位置に設けているため、モータ40から計量搬入装置2の搬入部材、後ろ折込板78、排出プッシャー80がそれぞれ近い場所に位置し、各リンク機構等の構造を簡易且つ小さくすることができている。
【0043】
(3)
包装機1および包装機操作ユニット100から成る本実施形態に係る包装機システムでは、包装機操作ユニット100が操作用プログラム105を有し、それに組み込まれる基本モジュール105bが、操作用プログラム105の指令に基づいて、包装機1の制御部9に動作指示を送っている。すなわち、ここでは、包装機操作ユニット100に入力された操作指示内容が、操作用プログラム105によって指令に変えられ、その指令に基づいて基本モジュール105bが動作指示を包装機1の制御部9に送っている。これにより、基本モジュール105bが司る手順に沿って包装機1が動くようになる。
【0044】
なお、基本モジュール105bは、複数の異なる操作ユニットの操作用プログラムに組み込むことができるソフトウェアモジュールである。したがって、操作ユニット100,200と包装機1とを結ぶ通信線150を設けるだけで、包装機システムが実現される。
【0045】
<本実施形態の包装機の変形例>
(A)
上記の実施形態では、モータ40の回転力をリフト用のリンク機構41によって可動載置台32を上昇させる力に変えているが、モータ40の回転力を、ラックアンドピニオン機構やボールネジ機構などによって直線力に変換し、可動載置台32を上下させるようにしてもよい。
【0046】
また、搬入用のリンク機構25,26についても、リンク機構以外の変換機構を用いてモータ40の回転力を水平移動力に変えることができる。
【0047】
(B)
上記実施形態では、操作ユニット100,200と包装機1とを通信線150で結んでいるが、通信線150ではなく無線通信手段を用いて結んでもよい。すなわち、有線で結んでも無線で結んでもよい。
【符号の説明】
【0048】
1 包装機
2 計量搬入装置(搬入部)
9 制御部
32 可動載置台(載置部)
33 支持ベース
35 載置部材
35c 載置面
37 リフト駆動部
40 モータ
41 リフト用のリンク機構(リフト用変換機構)
49a 支持ピン(載置部の下部にある支点)
100 包装機操作ユニット
105 操作用プログラム
105b 多数ユニット対応の基本モジュール
150 通信線(通信手段)
200 包装機操作ユニット
205 操作用プログラム
【先行技術文献】
【特許文献】
【0049】
【特許文献1】特開2003−335306号公報
【特許請求の範囲】
【請求項1】
緊張保持させたフィルムに下方から被包装物を押し上げ、前記フィルムの周縁部を左右方向および後方向から前記被包装物の下側へと折り込み、さらに、前記被包装物を前方向に排出させながら前記フィルムの周縁部を前方向から折り込む包装機であって、
前記被包装物が載る載置面を含む載置部と、
緊張保持させているフィルムの下方に前記被包装物が位置するリフト前ポジションから、前記被包装物が前記フィルムを押し上げるリフト後ポジションへと、前記載置部を上昇させる、リフト駆動部と、
を備え、
前記リフト駆動部は、モータと、前記モータの回転力を前記載置部を上昇させる力に変えるリフト用変換機構とを有し、
前記モータは、前記リフト前ポジションにある前記載置部よりも高い位置に設けられている、
包装機。
【請求項2】
使用者が包装前の前記被包装物を置く投入空間から、前記リフト前ポジションにある前記載置部の載置面の上へと、前記被包装物を移動させる、搬入部をさらに備え、
前記搬入部は、前記リフト駆動部の前記モータの回転力を前記被包装物を移動させる力に変える搬入用変換機構を有する、
請求項1に記載の包装機。
【請求項3】
前記リフト用変換機構は、リフト用リンク機構であり、
前記リフト用リンク機構の一端は、載置部の下部にある支点に連結されており、
前記モータは、前記リフト前ポジションにある前記載置部の前記支点よりも高い位置で且つ前記リフト後ポジションにある前記載置部の載置面よりも低い位置に設けられている、
請求項1又は2に記載の包装機。
【請求項4】
前記リフト用変換機構は、リフト用リンク機構であり、
前記リフト用リンク機構の一端は、載置部の下部にある支点に連結されており、
前記モータは、前記リフト前ポジションにある前記載置部の前記支点よりも高い位置で且つ前記リフト後ポジションにある前記載置部の前記支点よりも低い位置に設けられている、
請求項1又は2に記載の包装機。
【請求項5】
少なくとも前記モータを制御する制御部をさらに備えた、請求項1から4のいずれかに記載の包装機と、
操作用プログラムを有し、前記包装機の近傍に設置される操作ユニットと、
前記操作用プログラムの指令に基づき、前記包装機の前記制御部に動作指示を送る、基本モジュールと、
を備えた包装機システム。
【請求項6】
前記基本モジュールは、複数の異なる前記操作ユニットの前記操作用プログラムに組み込むことができるソフトウェアモジュールであり、
前記操作ユニットと前記包装機とを結ぶ通信手段をさらに備えた、
請求項5に記載の包装機システム。
【請求項1】
緊張保持させたフィルムに下方から被包装物を押し上げ、前記フィルムの周縁部を左右方向および後方向から前記被包装物の下側へと折り込み、さらに、前記被包装物を前方向に排出させながら前記フィルムの周縁部を前方向から折り込む包装機であって、
前記被包装物が載る載置面を含む載置部と、
緊張保持させているフィルムの下方に前記被包装物が位置するリフト前ポジションから、前記被包装物が前記フィルムを押し上げるリフト後ポジションへと、前記載置部を上昇させる、リフト駆動部と、
を備え、
前記リフト駆動部は、モータと、前記モータの回転力を前記載置部を上昇させる力に変えるリフト用変換機構とを有し、
前記モータは、前記リフト前ポジションにある前記載置部よりも高い位置に設けられている、
包装機。
【請求項2】
使用者が包装前の前記被包装物を置く投入空間から、前記リフト前ポジションにある前記載置部の載置面の上へと、前記被包装物を移動させる、搬入部をさらに備え、
前記搬入部は、前記リフト駆動部の前記モータの回転力を前記被包装物を移動させる力に変える搬入用変換機構を有する、
請求項1に記載の包装機。
【請求項3】
前記リフト用変換機構は、リフト用リンク機構であり、
前記リフト用リンク機構の一端は、載置部の下部にある支点に連結されており、
前記モータは、前記リフト前ポジションにある前記載置部の前記支点よりも高い位置で且つ前記リフト後ポジションにある前記載置部の載置面よりも低い位置に設けられている、
請求項1又は2に記載の包装機。
【請求項4】
前記リフト用変換機構は、リフト用リンク機構であり、
前記リフト用リンク機構の一端は、載置部の下部にある支点に連結されており、
前記モータは、前記リフト前ポジションにある前記載置部の前記支点よりも高い位置で且つ前記リフト後ポジションにある前記載置部の前記支点よりも低い位置に設けられている、
請求項1又は2に記載の包装機。
【請求項5】
少なくとも前記モータを制御する制御部をさらに備えた、請求項1から4のいずれかに記載の包装機と、
操作用プログラムを有し、前記包装機の近傍に設置される操作ユニットと、
前記操作用プログラムの指令に基づき、前記包装機の前記制御部に動作指示を送る、基本モジュールと、
を備えた包装機システム。
【請求項6】
前記基本モジュールは、複数の異なる前記操作ユニットの前記操作用プログラムに組み込むことができるソフトウェアモジュールであり、
前記操作ユニットと前記包装機とを結ぶ通信手段をさらに備えた、
請求項5に記載の包装機システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−148781(P2012−148781A)
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願番号】特願2011−6377(P2011−6377)
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
【公開日】平成24年8月9日(2012.8.9)
【国際特許分類】
【出願日】平成23年1月14日(2011.1.14)
【出願人】(000147833)株式会社イシダ (859)
【Fターム(参考)】
[ Back to top ]