
化合物をプロファイル解析するデバイス、システムおよび関連方法
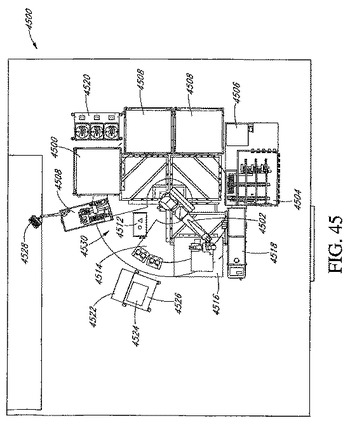
さまざまな化合物プロファイル解析プロセスを行うために用いられるハイスループット化合物プロファイル解析システム、および関連デバイスおよびサブシステムを提供する。これらのシステムは、通常、効率性および処理精度を最適化するように構成された作業周辺域を有する。さらに、特定のシステムにおいて、数多くの異なるシステム構成部品を容易に採用し、置換することができるので、これらのシステムは、広範な一連の分析を行うように容易に構成することができる。本願発明により提供されるシステム構成部品は、たとえば細胞のウェッティング、分離および/または攪拌のために用いられる培養細胞分離機を有する。いくつかの実施形態では、これらの培養細胞分離機は、自動培養細胞継代ステーションの構成部品として含まれる。流体温度の制御を一括して可能にする投与デバイスが提供される。さらに、さまざまな化合物プロファイル解析方法、細胞分離方法、および均一な細胞濃度の投与方法が提供される。

Notice: Undefined index: DEJ in /mnt/www/gzt_disp.php on line 298
【特許請求の範囲】
【請求項1】
自動細胞培養継代システムであって、
細胞培養容器内で細胞の成長を支援するように構成された培養デバイスと、
細胞培養容器内の細胞を分析するように構成された分析部とを備え、
培養デバイスは、人間の介入を必要とすることなく、細胞培養容器内の細胞を分析デバイスに直接的または間接的に搬送することを特徴とするシステム。
【請求項2】
請求項1に記載のシステムであって、
分析部は、
少なくとも1つの試薬ソース容器を支持するように構成された試薬ソース領域と、
少なくとも1つの細胞サンプル容器を支持するように構成された分析領域と、
試薬ソース容器が試薬ソース領域内に支持され、細胞サンプル容器が分析領域内に支持されたとき、少なくとも1つの試薬を試薬ソース容器から細胞サンプル容器に搬送するように構成されたマテリアル搬送デバイスとを備えたことを特徴とするシステム。
【請求項3】
請求項2に記載のシステムであって、
論理デバイスを有するコントローラをさらに有することを特徴とするシステム。
【請求項4】
請求項3に記載のシステムであって、
コントローラは、マテリアル搬送デバイスに作動可能に接続され、
論理デバイスは、マテリアル搬送デバイスを試薬ソース領域と分析領域との間で直接的に移動させるように制御する論理的指令を含むことを特徴とするシステム。
【請求項5】
請求項3に記載のシステムであって、
細胞培養容器および試薬ソース容器のいずれか一方または両方がマルチウェル容器であることを特徴とするシステム。
【請求項6】
請求項3に記載のシステムであって、
試薬は、化合物、蛋白質、核酸、ウィルス粒子、およびバクテリオファージからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項7】
請求項6に記載のシステムであって、
試薬は、低分子干渉RNA(siRNA)、アンチセンスRNA、相補DNA(cDNA)、およびベクタからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項8】
請求項6に記載のシステムであって、
試薬は、酵素、抗体、および調整蛋白質からなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項9】
請求項6に記載のシステムであって、
試薬は、バキュロウイルス、レトロウイルス、レンチウイルス、およびアデノウイルスからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項10】
請求項3に記載のシステムであって、
細胞サンプル容器内で生成された1つまたはそれ以上の検出可能な信号を検出するように構成された少なくとも1つの検出器をさらに有することを特徴とするシステム。
【請求項11】
請求項3に記載のシステムであって、
マテリアル搬送デバイスは、非圧力式マテリアル搬送プローブを有することを特徴とするシステム。
【請求項12】
請求項11に記載のシステムであって、
非圧力式マテリアル搬送プローブは、ピンツールを含むことを特徴とするシステム。
【請求項13】
請求項12に記載のシステムであって、
マテリアル搬送プローブは、少なくとも1つのシャーシを有し、
ピンツールは、シャーシに着脱可能に固定される少なくとも1つの固定部材を有する支持構造体を有することを特徴とするシステム。
【請求項14】
請求項13に記載のシステムであって、
論理デバイスは、シャーシに対してピンツールを着脱するようにマテリアル搬送デバイスを制御する論理的指令を含むことを特徴とするシステム。
【請求項15】
請求項13に記載のシステムであって、
ピンツールは、1つまたはそれ以上の軸に沿って支持構造体に対して回転可能となるように、回転調整部材を含むピンツールヘッドを有することを特徴とするシステム。
【請求項16】
請求項3に記載のシステムであって、
試薬ソース領域および/または分析領域は、容器配置デバイスを有し、
容器配置デバイスは、少なくとも1つの容器をマテリアル搬送デバイスに対して配置するように構成された少なくとも1つの容器ステーションを有することを特徴とするシステム。
【請求項17】
請求項16に記載のシステムであって、
容器ステーションは、6,12,24,48,96,192,384,768,1536,3456,9600またはそれ以上のウェルを有する少なくとも1つのマルチウェル容器を配置するように構成されたことを特徴とするシステム。
【請求項18】
請求項16に記載のシステムであって、
容器ステーションは、マテリアル搬送デバイスに対して回転するように構成されたことを特徴とするシステム。
【請求項19】
請求項3に記載のシステムであって、
非圧力式マテリアル搬送プローブを洗浄するように構成された少なくとも1つの洗浄容器を含む少なくとも1つのマテリアル搬送プローブ洗浄ステーションをさらに有することを特徴とするシステム。
【請求項20】
請求項19に記載のシステムであって、
非圧力式マテリアル搬送プローブが洗浄される場合、および/または非圧力式マテリアル搬送プローブがマテリアル搬送デバイスのシャーシから分離された場合において、洗浄容器は、これに対して非圧力式マテリアル搬送プローブを配置するための少なくとも1つのマウントを有することを特徴とするシステム。
【請求項21】
請求項1に記載のシステムであって、
浄化デバイスをさらに備え、この浄化デバイスは、
システム構成部品を内蔵する第1のチャンバと、
第1のチャンバと連通する第2のチャンバであって、第1および第2のチャンバの間で1つまたはそれ以上の容器が移送される第2のチャンバと、
少なくとも第2のチャンバと連通する浄化部品とを有し、
浄化部品は、容器が第2のチャンバ内に配置されたとき、容器の1つまたはそれ以上の表面を実質的に浄化するように構成されたことを特徴とするシステム。
【請求項22】
請求項21に記載のシステムであって、
システム構成部品は、培養細胞分離機、マテリアル操作部、および/または容器配置デバイスを有することを特徴とするシステム。
【請求項23】
請求項21に記載のシステムであって、
少なくとも1つの容器を少なくとも第1および第2のチャンバ間で移送するように構成された移送機構をさらに有することを特徴とするシステム。
【請求項24】
請求項21に記載のシステムであって、
第1のチャンバは、実質的に殺菌された環境を有することを特徴とするシステム。
【請求項25】
請求項21に記載のシステムであって、
第2のチャンバは、前処理チャンバを有することを特徴とするシステム。
【請求項26】
請求項21に記載のシステムであって、
容器が第2のチャンバ内にあるとき、容器の表面に光を照射し、表面を実質的に浄化する少なくとも1つの電磁放射線源を有することを特徴とするシステム。
【請求項27】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、第2のチャンバ内の温度を調整して表面を実質的に浄化する少なくとも1つの温度調整器を有することを特徴とするシステム。
【請求項28】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、霧状の浄化流体を容器の表面上に噴霧する少なくとも1つの浄化流体噴霧器を有することを特徴とするシステム。
【請求項29】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、容器の1つまたはそれ以上の表面から少なくとも1つの汚染物質を実質的に取り除くために十分な流速で第2のチャンバ内にガスフローを吹き付ける少なくとも1つのガスソースを有することを特徴とするシステム。
【請求項30】
請求項29に記載のシステムであって、
ガスには空気が含まれることを特徴とするシステム。
【請求項31】
請求項1に記載のシステムであって、
コントローラに作動可能に接続された1つまたはそれ以上の追加的なシステム構成部品をさらに有し、
追加的なシステム構成部品は、ロボット把持デバイス、マテリアル操作部、細胞計数デバイス、遠心分離機、検出器、冷凍機、発酵装置、廃液容器、濾過デバイス、蓋処理デバイス、搬送ステーション、培養デバイス、コロニー抽出デバイス、濾過デバイス、高感度画像形成デバイス、ピンツール乾燥または拭浄ステーション、細胞分離機、容器保管デバイスからなる群より選択されることを特徴とするシステム。
【請求項32】
請求項31に記載のシステムであって、
コントローラと作動可能に接続された少なくとも1つの容器位置データベースをさらに有し、
容器位置データベースは、システム内の容器の配置位置に対応するエントリを有することを特徴とするシステム。
【請求項33】
請求項1に記載のシステムであって、
マテリアル操作部をさらに有し、
マテリアル操作部は、流体マテリアルを、システムの1つまたはそれ以上の構成部品に配置された容器に、そして/または容器から搬送するように構成された少なくとも1つの流体マテリアル搬送部を有することを特徴とするシステム。
【請求項34】
請求項33に記載のシステムであって、
流体マテリアル搬送部は、細胞培養サンプル容器、細胞培養フラスコ、および/またはマルチウェル容器の間で細胞培養液を搬送するように構成されたことを特徴とするシステム。
【請求項35】
請求項34に記載のシステムであって、
論理デバイスを含むコントローラをさらに備え、
この論理デバイスは、
流体マテリアル搬送部を用いて、m個の第1の細胞培養容器から個別の第1の細胞培養液をn個の第2の容器に蓄積して、蓄積細胞培養液を形成するように制御する(mは1以上の整数であり、nは0以上m未満の整数である。)とともに、
流体マテリアル搬送部を用いて、n個の第2の容器から選択された量の蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送する(pは1以上の整数である。)、の少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項36】
請求項35に記載のシステムであって、
コントローラと作動可能に接続された少なくとも1つ検出部をさらに備え、
検出部は、蓄積細胞培養液内の細胞濃度または蓄積細胞培養液からの細胞濃度を検出することを特徴とするシステム。
【請求項37】
請求項33に記載のシステムであって、
流体マテリアル搬送部は投与デバイスを有し、投与デバイスは、
互いに流体連通する入口および出口を含む導管と、
導管の入口と流体連通する流体ソースと、
導管および/または流体ソースに作動可能に接続され、少なくとも1つの流体試薬を流体ソースから導管を経て送出するように構成された流体送出デバイスと、
導管の少なくとも一部と熱伝導し、流体試薬が流体ソースから導管を経て送出されるとき、流体試薬の温度を選択的に調節するように構成された温度調節部とを備えたことを特徴とするシステム。
【請求項38】
請求項37に記載のシステムであって、
流体ソースを選択された温度で保管する流体ソース保管デバイスをさらに有することを特徴とするシステム。
【請求項39】
請求項37に記載のシステムであって、
選択された温度は約4℃であることを特徴とするシステム。
【請求項40】
請求項37に記載のシステムであって、
導管の少なくとも一部を含む少なくとも1つの投与ヘッドをさらに有することを特徴とするシステム。
【請求項41】
請求項40に記載のシステムであって、
導管の一部は、コイル状構造体を含むことを特徴とするシステム。
【請求項42】
請求項40に記載のシステムであって、
複数の導管を有し、
投与ヘッドは、各導管の1つまたはそれ以上の部分を有することを特徴とするシステム。
【請求項43】
請求項42に記載のシステムであって、
複数の流体ソースをさらに備え、
各導管は異なる流体ソースと流体連通することを特徴とするシステム。
【請求項44】
請求項40に記載のシステムであって、
投与ヘッドは、導管の一部を含む少なくとも1つのチャンバを有し、
チャンバは、温度調節部と流体連通する少なくとも1つの開口部を有し、
温度調節部は、流体試薬が導管の一部に流れるとき、流体試薬が実質的に選択された温度を保持するように、選択された温度を有する少なくとも1つの流体マテリアルをチャンバ内に流すことを特徴とするシステム。
【請求項45】
請求項44に記載のシステムであって、
流体マテリアルは不凍液を含むことを特徴とするシステム。
【請求項46】
請求項44に記載のシステムであって、
選択された温度は約37℃であることを特徴とするシステム。
【請求項47】
請求項44に記載のシステムであって、
温度調節部は、流体マテリアルを選択された温度で実質的に維持するように、少なくとも1つの流体マテリアル再循環バスを有することを特徴とするシステム。
【請求項48】
請求項1に記載のシステムであって、
少なくとも1つの回転式ロボットを有する少なくとも1つのハイスループット処理ステーションをさらに備え、
回転式ロボットは、これに付随する作業周辺域を形成するリーチ範囲を有し、
少なくとも細胞培養デバイスは回転式ロボットのリーチ範囲にあることを特徴とするシステム。
【請求項49】
請求項1に記載のシステムであって、
細胞培養容器を細胞培養デバイスと分析デバイスの間で搬送できるロボットアームをさらに有することを特徴とするシステム。
【請求項50】
請求項49に記載のシステムであって、
少なくとも1つの第2のロボットアームを有することを特徴とするシステム。
【請求項51】
請求項1に記載のシステムであって、
人間の介入を必要とすることなく、2つまたはそれ以上の細胞株に分割または分離培養できることを特徴とするシステム。
【請求項52】
請求項51に記載のシステムであって、
人間の介入を必要とすることなく、25またはそれ以上の細胞株に分割または分離培養できることを特徴とするシステム。
【請求項53】
請求項51に記載のシステムであって、
少なくとも1つの細胞培養容器を受容するように構成された容器受容領域を含む容器ホルダ、容器ホルダと作動可能に接続され、容器ホルダを第1および第2の位置の間で移動させるように構成された移動機構、および移動機構による容器ホルダの移動を制限する係止部を有する細胞分離機と、
マテリアル操作部と、
細胞分離機およびマテリアル操作部に作動可能に接続されたコントローラとを備え、
コントローラは、選択された速度で容器ホルダを移動させるように移動機構を制御するとともに、細胞培養容器が容器受容領域に配置されたとき、マテリアル操作部がマテリアルを細胞培養容器内に投与し、細胞培養容器から抽出するように制御する論理的指令を含む論理デバイスを有することを特徴とするシステム。
【請求項54】
請求項51に記載のシステムであって、
移動機構は、容器ホルダを軸の周りに回転させるように構成された回転機構を含み、
係止部は、回転機構による容器ホルダの変位角を制限し、
論理的指令は、容器ホルダを選択された速度で回転させるように回転機構を制御することを特徴とするシステム。
【請求項55】
請求項54に記載のシステムであって、
回転機構は、容器ホルダを回転させるとき、容器ホルダの重量を相殺する釣り合い重りを有することを特徴とするシステム。
【請求項56】
請求項54に記載のシステムであって、
細胞分離機は、複数の容器ホルダを有し、
複数の容器ホルダは、互いに対して重量相殺するように、回転軸に対して対称的に配置されることを特徴とするシステム。
【請求項57】
請求項54に記載のシステムであって、
回転機構は、第1の方向における容器ホルダの変位角を制限する第1の係止部と、第1の方向とは反対方向の第2の方向における容器ホルダの変位角を制限する第2の係止部とを有することを特徴とするシステム。
【請求項58】
請求項54に記載のシステムであって、
選択された速度は、係止部と衝突するとき、少なくとも0.25回転/sの角速度であることを特徴とするシステム。
【請求項59】
請求項54に記載のシステムであって、
容器ホルダは、係止部と衝突するとき、少なくとも1.0回転/s2で減速することを特徴とするシステム。
【請求項60】
請求項54に記載のシステムであって、
容器ホルダは、長軸および短軸を含む上壁を有する細胞培養容器を受容するように構成され、
回転機構は、容器ホルダを第1の方向、およびこれとは反対方向であって上壁の短軸に平行な第2の方向に回転させることを特徴とするシステム。
【請求項61】
請求項54に記載のシステムであって、
容器ホルダは、長軸および短軸を含む上壁を有する細胞培養容器を受容するように構成され、
回転機構は、容器ホルダを第1の方向、およびこれとは反対方向であって上壁の長軸に平行な第2の方向に回転させることを特徴とするシステム。
【請求項62】
請求項54に記載のシステムであって、
容器ホルダに対して移動可能な少なくとも1つの容器保持部品をさらに有し、
細胞培養容器が容器受容領域に配置され、容器ホルダが閉じた状態にあるとき、容器保持部品は、細胞培養容器を容器保持部品に対して実質的に固定した位置に保持するように構成されることを特徴とするシステム。
【請求項63】
請求項62に記載のシステムであって、
容器ホルダおよび容器保持部品は、少なくとも1つのスライド可動式連結部を介して互いに連結されることを特徴とするシステム。
【請求項64】
請求項62に記載のシステムであって、
論理デバイスは、容器ホルダを開閉するように制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項65】
請求項62に記載のシステムであって、
容器保持部品は、容器保持プレートを有することを特徴とするシステム。
【請求項66】
請求項62に記載のシステムであって、
細胞培養容器が容器受容領域に配置され、容器ホルダが閉じた状態にあるとき、容器保持部品は、細胞培養容器にアクセスすることを許容するように構成されることを特徴とするシステム。
【請求項67】
請求項54に記載のシステムであって、
複数の容器ホルダからなるマルチ容器ホルダをさらに有し、
マルチ容器ホルダは、移動機構に作動可能に接続されないことを特徴とするシステム。
【請求項68】
請求項67に記載のシステムであって、
論理デバイスは、容器ホルダを開閉するように制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項69】
請求項67に記載のシステムであって、
マルチ容器ホルダに作動可能に接続された少なくとも1つの並進移動機構をさらに有し、
並進移動機構は、マルチ容器ホルダを少なくとも1つの並進移動軸に沿って移動させるように構成されたことを特徴とするシステム。
【請求項70】
請求項69に記載のシステムであって、
コントローラは、並進移動機構に作動可能に接続され、マルチ容器ホルダを並進移動軸に沿って1つまたはそれ以上の選択された位置に並進移動させるように並進移動機構を制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項71】
細胞培養を継代し、分析する自動化された方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップと、
ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップと、
分析容器内に配置された細胞培養液の一部を分析するステップとを有し、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップ、ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップ、および分析するステップは、人間が介入することなく行われることを特徴とする方法。
【請求項72】
請求項70に記載の方法であって、
ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップは、細胞培養液の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与するステップを含み、
分析容器内に配置された細胞培養液の一部を分析するステップは、
マルチウェル容器のウェルに試薬を投与するステップと、
細胞に対する試薬の影響を検出するステップとを含むことを特徴とする方法。
【請求項73】
請求項72に記載の方法であって、
複数のソース容器は、異なる細胞株または同一の細胞株の細胞を有し、
各細胞株の細胞アリコートは、マルチウェル容器の1つまたはそれ以上のウェルに投与されることを特徴とする方法。
【請求項74】
請求項73に記載の方法であって、
各細胞株の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与したとき、特定のマルチウェル容器の細胞を含むすべてのウェルは同一細胞株の細胞を含むことを特徴とする方法。
【請求項75】
請求項73に記載の方法であって、
各細胞株の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与したとき、特定のマルチウェル容器は第1の細胞株の細胞を含むウェルと、少なくとも第2の細胞株の細胞を含むウェルとを有することを特徴とする方法。
【請求項76】
請求項72に記載の方法であって、
試薬は、化合物、核酸、蛋白質、ウィルス、およびバクテリオファージからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とすることを特徴とする方法。
【請求項77】
請求項72に記載の方法であって、
細胞に対する5000種類未満の試薬をプロファイル解析することを特徴とする方法。
【請求項78】
請求項72に記載の方法であって、
細胞に対する5000種類以上の試薬をプロファイル解析することを特徴とする方法。
【請求項79】
請求項72に記載の方法であって、
細胞に対する試薬の効果は、細胞増殖、細胞死、転座、および蛋白質合成のうちの1つまたはそれ以上の促進および抑制であることを特徴とする方法。
【請求項80】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップは、ソース容器内に配置された細胞培養液の少なくとも一部を複数のドータ容器に搬送するステップを含むことを特徴とする方法。
【請求項81】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、細胞培養液の細胞を非干渉的に計数するステップをさらに有することを特徴とする方法。
【請求項82】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、ソース容器を攪拌するステップをさらに有することを特徴とする方法。
【請求項83】
請求項82に記載の方法であって、
ソース容器は、ロボットアームを用いて攪拌されることを特徴とする方法。
【請求項84】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、細胞培養液内の細胞濃度が特定されることを特徴とする方法。
【請求項85】
請求項84に記載の方法であって、
ドータ容器に搬送された細胞培養液の一部の容量が細胞濃度に基づいて求められることを特徴とする方法。
【請求項86】
請求項71に記載の方法であって、
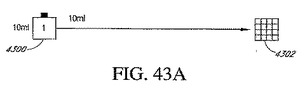
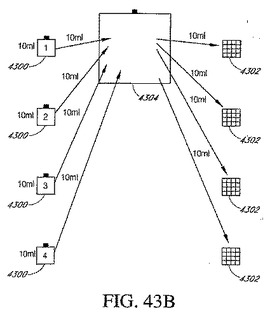
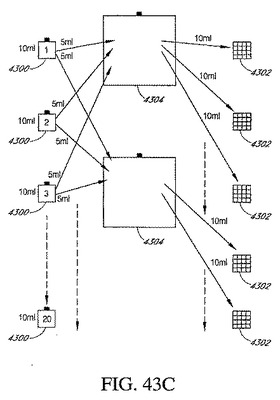
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップは、
m個のソース容器から第1の細胞培養液をn個のドータ容器に蓄積して、蓄積細胞培養液を形成するステップ(mは1以上の整数であり、nは0以上m未満の整数である。)と、
ドータ細胞培養容器から蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送するステップ(pは1以上の整数である。)とを有することを特徴とする方法。
【請求項87】
請求項86に記載の方法であって、
mがpに等しいことを特徴とする方法。
【請求項88】
請求項86に記載の方法であって、
mが2以上100以下の整数に等しいことを特徴とする方法。
【請求項89】
請求項86に記載の方法であって、
pが2以上100以下の整数に等しいことを特徴とする方法。
【請求項90】
請求項86に記載の方法であって、
m:nの比が約1:1〜約100:1であることを特徴とする方法。
【請求項91】
請求項86に記載の方法であって、
少なくとも1つのドータ容器に含まれる蓄積細胞培養液内の細胞濃度を特定するステップをさらに有することを特徴とする方法。
【請求項92】
請求項86に記載の方法であって、
m個のソース容器から個別の細胞培養液をn個のドータ容器に蓄積するステップは、少なくとも1つのソース容器から細胞培養液を少なくとも2つのドータ容器に蓄積するステップを含むことを特徴とする方法。
【請求項93】
請求項86に記載の方法であって、
ドータ容器から選択された量の蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送するステップは、ドータ容器から実質的に同一量の蓄積細胞培養液をマルチウェル容器の実質的にすべてのウェルに搬送するステップを有することを特徴とする方法。
【請求項94】
請求項86に記載の方法であって、
ソース容器のそれぞれは、約10mlの容量を含むことを特徴とする方法。
【請求項95】
請求項86に記載の方法であって、
ドータ容器のそれぞれは、約100mlの容量を含むことを特徴とする方法。
【請求項96】
請求項86に記載の方法であって、
第1の細胞培養液の細胞は、単一の細胞株を含むことを特徴とする方法。
【請求項97】
請求項86に記載の方法であって、
マルチウェル容器のそれぞれは、6,12,24,48,96,192,384,768,1536,3456,9600またはそれ以上のウェルを有することを特徴とする方法。
【請求項98】
請求項86に記載の方法であって、
少なくとも1つのマルチウェル容器のウェルのそれぞれは、約10mlの容量を含むことを特徴とする方法。
【請求項99】
請求項86に記載の方法であって、
nは1以上の整数であり、
少なくとも1つのソース容器から実質的に同一量をドータ容器のそれぞれに搬送するステップを有することを特徴とする方法。
【請求項100】
請求項99に記載の方法であって、
実質的に同一量は約5mlであることを特徴とする方法。
【請求項101】
請求項71に記載の方法であって、
容器から細胞培養液を搬送する前に、細胞培養液内の細胞を互いに対して、そして/または容器に対して分離させるステップをさらに有することを特徴とする方法。
【請求項102】
請求項101に記載の方法であって、
細胞培養液内の細胞を分離させるステップは、
容器を培養細胞分離機の容器ホルダに設置するステップと、
容器ホルダの第1の方向における変位を制限する第1の係止部が当接するまで、容器ホルダを第1の方向に移動させるステップと、
第1の方向とは反対方向の容器ホルダの第2の方向における変位を制限する第2の係止部が当接するまで、容器ホルダを第2の方向に移動させるステップとを有することを特徴とする方法。
【請求項103】
請求項101に記載の方法であって、
細胞培養液内の細胞を分離させるステップは、
容器ホルダの第1の方向における変位角を制限する第1の係止部が当接するまで、容器ホルダを第1の方向に回転させるステップと、
第1の方向とは反対方向の容器ホルダの第2の方向における変位角を制限する第2の係止部が当接するまで、容器ホルダを第2の方向に回転させるステップとを有することを特徴とする方法。
【請求項104】
請求項103に記載の方法であって、
容器を容器ホルダに配置する前後またはその間において、少なくとも1つの解離性試薬をソース容器に投与するステップをさらに有することを特徴とする方法。
【請求項105】
請求項103に記載の方法であって、
解離した細胞の一部を1つまたはそれ以上の最終的な容器のそれぞれに搬送することにより、培養細胞を増殖させるステップをさらに有することを特徴とする方法。
【請求項1】
自動細胞培養継代システムであって、
細胞培養容器内で細胞の成長を支援するように構成された培養デバイスと、
細胞培養容器内の細胞を分析するように構成された分析部とを備え、
培養デバイスは、人間の介入を必要とすることなく、細胞培養容器内の細胞を分析デバイスに直接的または間接的に搬送することを特徴とするシステム。
【請求項2】
請求項1に記載のシステムであって、
分析部は、
少なくとも1つの試薬ソース容器を支持するように構成された試薬ソース領域と、
少なくとも1つの細胞サンプル容器を支持するように構成された分析領域と、
試薬ソース容器が試薬ソース領域内に支持され、細胞サンプル容器が分析領域内に支持されたとき、少なくとも1つの試薬を試薬ソース容器から細胞サンプル容器に搬送するように構成されたマテリアル搬送デバイスとを備えたことを特徴とするシステム。
【請求項3】
請求項2に記載のシステムであって、
論理デバイスを有するコントローラをさらに有することを特徴とするシステム。
【請求項4】
請求項3に記載のシステムであって、
コントローラは、マテリアル搬送デバイスに作動可能に接続され、
論理デバイスは、マテリアル搬送デバイスを試薬ソース領域と分析領域との間で直接的に移動させるように制御する論理的指令を含むことを特徴とするシステム。
【請求項5】
請求項3に記載のシステムであって、
細胞培養容器および試薬ソース容器のいずれか一方または両方がマルチウェル容器であることを特徴とするシステム。
【請求項6】
請求項3に記載のシステムであって、
試薬は、化合物、蛋白質、核酸、ウィルス粒子、およびバクテリオファージからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項7】
請求項6に記載のシステムであって、
試薬は、低分子干渉RNA(siRNA)、アンチセンスRNA、相補DNA(cDNA)、およびベクタからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項8】
請求項6に記載のシステムであって、
試薬は、酵素、抗体、および調整蛋白質からなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項9】
請求項6に記載のシステムであって、
試薬は、バキュロウイルス、レトロウイルス、レンチウイルス、およびアデノウイルスからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とするシステム。
【請求項10】
請求項3に記載のシステムであって、
細胞サンプル容器内で生成された1つまたはそれ以上の検出可能な信号を検出するように構成された少なくとも1つの検出器をさらに有することを特徴とするシステム。
【請求項11】
請求項3に記載のシステムであって、
マテリアル搬送デバイスは、非圧力式マテリアル搬送プローブを有することを特徴とするシステム。
【請求項12】
請求項11に記載のシステムであって、
非圧力式マテリアル搬送プローブは、ピンツールを含むことを特徴とするシステム。
【請求項13】
請求項12に記載のシステムであって、
マテリアル搬送プローブは、少なくとも1つのシャーシを有し、
ピンツールは、シャーシに着脱可能に固定される少なくとも1つの固定部材を有する支持構造体を有することを特徴とするシステム。
【請求項14】
請求項13に記載のシステムであって、
論理デバイスは、シャーシに対してピンツールを着脱するようにマテリアル搬送デバイスを制御する論理的指令を含むことを特徴とするシステム。
【請求項15】
請求項13に記載のシステムであって、
ピンツールは、1つまたはそれ以上の軸に沿って支持構造体に対して回転可能となるように、回転調整部材を含むピンツールヘッドを有することを特徴とするシステム。
【請求項16】
請求項3に記載のシステムであって、
試薬ソース領域および/または分析領域は、容器配置デバイスを有し、
容器配置デバイスは、少なくとも1つの容器をマテリアル搬送デバイスに対して配置するように構成された少なくとも1つの容器ステーションを有することを特徴とするシステム。
【請求項17】
請求項16に記載のシステムであって、
容器ステーションは、6,12,24,48,96,192,384,768,1536,3456,9600またはそれ以上のウェルを有する少なくとも1つのマルチウェル容器を配置するように構成されたことを特徴とするシステム。
【請求項18】
請求項16に記載のシステムであって、
容器ステーションは、マテリアル搬送デバイスに対して回転するように構成されたことを特徴とするシステム。
【請求項19】
請求項3に記載のシステムであって、
非圧力式マテリアル搬送プローブを洗浄するように構成された少なくとも1つの洗浄容器を含む少なくとも1つのマテリアル搬送プローブ洗浄ステーションをさらに有することを特徴とするシステム。
【請求項20】
請求項19に記載のシステムであって、
非圧力式マテリアル搬送プローブが洗浄される場合、および/または非圧力式マテリアル搬送プローブがマテリアル搬送デバイスのシャーシから分離された場合において、洗浄容器は、これに対して非圧力式マテリアル搬送プローブを配置するための少なくとも1つのマウントを有することを特徴とするシステム。
【請求項21】
請求項1に記載のシステムであって、
浄化デバイスをさらに備え、この浄化デバイスは、
システム構成部品を内蔵する第1のチャンバと、
第1のチャンバと連通する第2のチャンバであって、第1および第2のチャンバの間で1つまたはそれ以上の容器が移送される第2のチャンバと、
少なくとも第2のチャンバと連通する浄化部品とを有し、
浄化部品は、容器が第2のチャンバ内に配置されたとき、容器の1つまたはそれ以上の表面を実質的に浄化するように構成されたことを特徴とするシステム。
【請求項22】
請求項21に記載のシステムであって、
システム構成部品は、培養細胞分離機、マテリアル操作部、および/または容器配置デバイスを有することを特徴とするシステム。
【請求項23】
請求項21に記載のシステムであって、
少なくとも1つの容器を少なくとも第1および第2のチャンバ間で移送するように構成された移送機構をさらに有することを特徴とするシステム。
【請求項24】
請求項21に記載のシステムであって、
第1のチャンバは、実質的に殺菌された環境を有することを特徴とするシステム。
【請求項25】
請求項21に記載のシステムであって、
第2のチャンバは、前処理チャンバを有することを特徴とするシステム。
【請求項26】
請求項21に記載のシステムであって、
容器が第2のチャンバ内にあるとき、容器の表面に光を照射し、表面を実質的に浄化する少なくとも1つの電磁放射線源を有することを特徴とするシステム。
【請求項27】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、第2のチャンバ内の温度を調整して表面を実質的に浄化する少なくとも1つの温度調整器を有することを特徴とするシステム。
【請求項28】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、霧状の浄化流体を容器の表面上に噴霧する少なくとも1つの浄化流体噴霧器を有することを特徴とするシステム。
【請求項29】
請求項21に記載のシステムであって、
浄化部品は、容器が第2のチャンバ内に配置されているとき、容器の1つまたはそれ以上の表面から少なくとも1つの汚染物質を実質的に取り除くために十分な流速で第2のチャンバ内にガスフローを吹き付ける少なくとも1つのガスソースを有することを特徴とするシステム。
【請求項30】
請求項29に記載のシステムであって、
ガスには空気が含まれることを特徴とするシステム。
【請求項31】
請求項1に記載のシステムであって、
コントローラに作動可能に接続された1つまたはそれ以上の追加的なシステム構成部品をさらに有し、
追加的なシステム構成部品は、ロボット把持デバイス、マテリアル操作部、細胞計数デバイス、遠心分離機、検出器、冷凍機、発酵装置、廃液容器、濾過デバイス、蓋処理デバイス、搬送ステーション、培養デバイス、コロニー抽出デバイス、濾過デバイス、高感度画像形成デバイス、ピンツール乾燥または拭浄ステーション、細胞分離機、容器保管デバイスからなる群より選択されることを特徴とするシステム。
【請求項32】
請求項31に記載のシステムであって、
コントローラと作動可能に接続された少なくとも1つの容器位置データベースをさらに有し、
容器位置データベースは、システム内の容器の配置位置に対応するエントリを有することを特徴とするシステム。
【請求項33】
請求項1に記載のシステムであって、
マテリアル操作部をさらに有し、
マテリアル操作部は、流体マテリアルを、システムの1つまたはそれ以上の構成部品に配置された容器に、そして/または容器から搬送するように構成された少なくとも1つの流体マテリアル搬送部を有することを特徴とするシステム。
【請求項34】
請求項33に記載のシステムであって、
流体マテリアル搬送部は、細胞培養サンプル容器、細胞培養フラスコ、および/またはマルチウェル容器の間で細胞培養液を搬送するように構成されたことを特徴とするシステム。
【請求項35】
請求項34に記載のシステムであって、
論理デバイスを含むコントローラをさらに備え、
この論理デバイスは、
流体マテリアル搬送部を用いて、m個の第1の細胞培養容器から個別の第1の細胞培養液をn個の第2の容器に蓄積して、蓄積細胞培養液を形成するように制御する(mは1以上の整数であり、nは0以上m未満の整数である。)とともに、
流体マテリアル搬送部を用いて、n個の第2の容器から選択された量の蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送する(pは1以上の整数である。)、の少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項36】
請求項35に記載のシステムであって、
コントローラと作動可能に接続された少なくとも1つ検出部をさらに備え、
検出部は、蓄積細胞培養液内の細胞濃度または蓄積細胞培養液からの細胞濃度を検出することを特徴とするシステム。
【請求項37】
請求項33に記載のシステムであって、
流体マテリアル搬送部は投与デバイスを有し、投与デバイスは、
互いに流体連通する入口および出口を含む導管と、
導管の入口と流体連通する流体ソースと、
導管および/または流体ソースに作動可能に接続され、少なくとも1つの流体試薬を流体ソースから導管を経て送出するように構成された流体送出デバイスと、
導管の少なくとも一部と熱伝導し、流体試薬が流体ソースから導管を経て送出されるとき、流体試薬の温度を選択的に調節するように構成された温度調節部とを備えたことを特徴とするシステム。
【請求項38】
請求項37に記載のシステムであって、
流体ソースを選択された温度で保管する流体ソース保管デバイスをさらに有することを特徴とするシステム。
【請求項39】
請求項37に記載のシステムであって、
選択された温度は約4℃であることを特徴とするシステム。
【請求項40】
請求項37に記載のシステムであって、
導管の少なくとも一部を含む少なくとも1つの投与ヘッドをさらに有することを特徴とするシステム。
【請求項41】
請求項40に記載のシステムであって、
導管の一部は、コイル状構造体を含むことを特徴とするシステム。
【請求項42】
請求項40に記載のシステムであって、
複数の導管を有し、
投与ヘッドは、各導管の1つまたはそれ以上の部分を有することを特徴とするシステム。
【請求項43】
請求項42に記載のシステムであって、
複数の流体ソースをさらに備え、
各導管は異なる流体ソースと流体連通することを特徴とするシステム。
【請求項44】
請求項40に記載のシステムであって、
投与ヘッドは、導管の一部を含む少なくとも1つのチャンバを有し、
チャンバは、温度調節部と流体連通する少なくとも1つの開口部を有し、
温度調節部は、流体試薬が導管の一部に流れるとき、流体試薬が実質的に選択された温度を保持するように、選択された温度を有する少なくとも1つの流体マテリアルをチャンバ内に流すことを特徴とするシステム。
【請求項45】
請求項44に記載のシステムであって、
流体マテリアルは不凍液を含むことを特徴とするシステム。
【請求項46】
請求項44に記載のシステムであって、
選択された温度は約37℃であることを特徴とするシステム。
【請求項47】
請求項44に記載のシステムであって、
温度調節部は、流体マテリアルを選択された温度で実質的に維持するように、少なくとも1つの流体マテリアル再循環バスを有することを特徴とするシステム。
【請求項48】
請求項1に記載のシステムであって、
少なくとも1つの回転式ロボットを有する少なくとも1つのハイスループット処理ステーションをさらに備え、
回転式ロボットは、これに付随する作業周辺域を形成するリーチ範囲を有し、
少なくとも細胞培養デバイスは回転式ロボットのリーチ範囲にあることを特徴とするシステム。
【請求項49】
請求項1に記載のシステムであって、
細胞培養容器を細胞培養デバイスと分析デバイスの間で搬送できるロボットアームをさらに有することを特徴とするシステム。
【請求項50】
請求項49に記載のシステムであって、
少なくとも1つの第2のロボットアームを有することを特徴とするシステム。
【請求項51】
請求項1に記載のシステムであって、
人間の介入を必要とすることなく、2つまたはそれ以上の細胞株に分割または分離培養できることを特徴とするシステム。
【請求項52】
請求項51に記載のシステムであって、
人間の介入を必要とすることなく、25またはそれ以上の細胞株に分割または分離培養できることを特徴とするシステム。
【請求項53】
請求項51に記載のシステムであって、
少なくとも1つの細胞培養容器を受容するように構成された容器受容領域を含む容器ホルダ、容器ホルダと作動可能に接続され、容器ホルダを第1および第2の位置の間で移動させるように構成された移動機構、および移動機構による容器ホルダの移動を制限する係止部を有する細胞分離機と、
マテリアル操作部と、
細胞分離機およびマテリアル操作部に作動可能に接続されたコントローラとを備え、
コントローラは、選択された速度で容器ホルダを移動させるように移動機構を制御するとともに、細胞培養容器が容器受容領域に配置されたとき、マテリアル操作部がマテリアルを細胞培養容器内に投与し、細胞培養容器から抽出するように制御する論理的指令を含む論理デバイスを有することを特徴とするシステム。
【請求項54】
請求項51に記載のシステムであって、
移動機構は、容器ホルダを軸の周りに回転させるように構成された回転機構を含み、
係止部は、回転機構による容器ホルダの変位角を制限し、
論理的指令は、容器ホルダを選択された速度で回転させるように回転機構を制御することを特徴とするシステム。
【請求項55】
請求項54に記載のシステムであって、
回転機構は、容器ホルダを回転させるとき、容器ホルダの重量を相殺する釣り合い重りを有することを特徴とするシステム。
【請求項56】
請求項54に記載のシステムであって、
細胞分離機は、複数の容器ホルダを有し、
複数の容器ホルダは、互いに対して重量相殺するように、回転軸に対して対称的に配置されることを特徴とするシステム。
【請求項57】
請求項54に記載のシステムであって、
回転機構は、第1の方向における容器ホルダの変位角を制限する第1の係止部と、第1の方向とは反対方向の第2の方向における容器ホルダの変位角を制限する第2の係止部とを有することを特徴とするシステム。
【請求項58】
請求項54に記載のシステムであって、
選択された速度は、係止部と衝突するとき、少なくとも0.25回転/sの角速度であることを特徴とするシステム。
【請求項59】
請求項54に記載のシステムであって、
容器ホルダは、係止部と衝突するとき、少なくとも1.0回転/s2で減速することを特徴とするシステム。
【請求項60】
請求項54に記載のシステムであって、
容器ホルダは、長軸および短軸を含む上壁を有する細胞培養容器を受容するように構成され、
回転機構は、容器ホルダを第1の方向、およびこれとは反対方向であって上壁の短軸に平行な第2の方向に回転させることを特徴とするシステム。
【請求項61】
請求項54に記載のシステムであって、
容器ホルダは、長軸および短軸を含む上壁を有する細胞培養容器を受容するように構成され、
回転機構は、容器ホルダを第1の方向、およびこれとは反対方向であって上壁の長軸に平行な第2の方向に回転させることを特徴とするシステム。
【請求項62】
請求項54に記載のシステムであって、
容器ホルダに対して移動可能な少なくとも1つの容器保持部品をさらに有し、
細胞培養容器が容器受容領域に配置され、容器ホルダが閉じた状態にあるとき、容器保持部品は、細胞培養容器を容器保持部品に対して実質的に固定した位置に保持するように構成されることを特徴とするシステム。
【請求項63】
請求項62に記載のシステムであって、
容器ホルダおよび容器保持部品は、少なくとも1つのスライド可動式連結部を介して互いに連結されることを特徴とするシステム。
【請求項64】
請求項62に記載のシステムであって、
論理デバイスは、容器ホルダを開閉するように制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項65】
請求項62に記載のシステムであって、
容器保持部品は、容器保持プレートを有することを特徴とするシステム。
【請求項66】
請求項62に記載のシステムであって、
細胞培養容器が容器受容領域に配置され、容器ホルダが閉じた状態にあるとき、容器保持部品は、細胞培養容器にアクセスすることを許容するように構成されることを特徴とするシステム。
【請求項67】
請求項54に記載のシステムであって、
複数の容器ホルダからなるマルチ容器ホルダをさらに有し、
マルチ容器ホルダは、移動機構に作動可能に接続されないことを特徴とするシステム。
【請求項68】
請求項67に記載のシステムであって、
論理デバイスは、容器ホルダを開閉するように制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項69】
請求項67に記載のシステムであって、
マルチ容器ホルダに作動可能に接続された少なくとも1つの並進移動機構をさらに有し、
並進移動機構は、マルチ容器ホルダを少なくとも1つの並進移動軸に沿って移動させるように構成されたことを特徴とするシステム。
【請求項70】
請求項69に記載のシステムであって、
コントローラは、並進移動機構に作動可能に接続され、マルチ容器ホルダを並進移動軸に沿って1つまたはそれ以上の選択された位置に並進移動させるように並進移動機構を制御する少なくとも1つの論理的指令を含むことを特徴とするシステム。
【請求項71】
細胞培養を継代し、分析する自動化された方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップと、
ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップと、
分析容器内に配置された細胞培養液の一部を分析するステップとを有し、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップ、ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップ、および分析するステップは、人間が介入することなく行われることを特徴とする方法。
【請求項72】
請求項70に記載の方法であって、
ドータ容器内に配置された細胞培養液の少なくとも一部を分析容器に投与するステップは、細胞培養液の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与するステップを含み、
分析容器内に配置された細胞培養液の一部を分析するステップは、
マルチウェル容器のウェルに試薬を投与するステップと、
細胞に対する試薬の影響を検出するステップとを含むことを特徴とする方法。
【請求項73】
請求項72に記載の方法であって、
複数のソース容器は、異なる細胞株または同一の細胞株の細胞を有し、
各細胞株の細胞アリコートは、マルチウェル容器の1つまたはそれ以上のウェルに投与されることを特徴とする方法。
【請求項74】
請求項73に記載の方法であって、
各細胞株の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与したとき、特定のマルチウェル容器の細胞を含むすべてのウェルは同一細胞株の細胞を含むことを特徴とする方法。
【請求項75】
請求項73に記載の方法であって、
各細胞株の細胞アリコートをマルチウェル容器の1つまたはそれ以上のウェルに投与したとき、特定のマルチウェル容器は第1の細胞株の細胞を含むウェルと、少なくとも第2の細胞株の細胞を含むウェルとを有することを特徴とする方法。
【請求項76】
請求項72に記載の方法であって、
試薬は、化合物、核酸、蛋白質、ウィルス、およびバクテリオファージからなる群より選択された1つまたはそれ以上の試薬を含むことを特徴とすることを特徴とする方法。
【請求項77】
請求項72に記載の方法であって、
細胞に対する5000種類未満の試薬をプロファイル解析することを特徴とする方法。
【請求項78】
請求項72に記載の方法であって、
細胞に対する5000種類以上の試薬をプロファイル解析することを特徴とする方法。
【請求項79】
請求項72に記載の方法であって、
細胞に対する試薬の効果は、細胞増殖、細胞死、転座、および蛋白質合成のうちの1つまたはそれ以上の促進および抑制であることを特徴とする方法。
【請求項80】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップは、ソース容器内に配置された細胞培養液の少なくとも一部を複数のドータ容器に搬送するステップを含むことを特徴とする方法。
【請求項81】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、細胞培養液の細胞を非干渉的に計数するステップをさらに有することを特徴とする方法。
【請求項82】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、ソース容器を攪拌するステップをさらに有することを特徴とする方法。
【請求項83】
請求項82に記載の方法であって、
ソース容器は、ロボットアームを用いて攪拌されることを特徴とする方法。
【請求項84】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップの前に、細胞培養液内の細胞濃度が特定されることを特徴とする方法。
【請求項85】
請求項84に記載の方法であって、
ドータ容器に搬送された細胞培養液の一部の容量が細胞濃度に基づいて求められることを特徴とする方法。
【請求項86】
請求項71に記載の方法であって、
ソース容器内に配置された細胞培養液の一部をドータ容器に搬送するステップは、
m個のソース容器から第1の細胞培養液をn個のドータ容器に蓄積して、蓄積細胞培養液を形成するステップ(mは1以上の整数であり、nは0以上m未満の整数である。)と、
ドータ細胞培養容器から蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送するステップ(pは1以上の整数である。)とを有することを特徴とする方法。
【請求項87】
請求項86に記載の方法であって、
mがpに等しいことを特徴とする方法。
【請求項88】
請求項86に記載の方法であって、
mが2以上100以下の整数に等しいことを特徴とする方法。
【請求項89】
請求項86に記載の方法であって、
pが2以上100以下の整数に等しいことを特徴とする方法。
【請求項90】
請求項86に記載の方法であって、
m:nの比が約1:1〜約100:1であることを特徴とする方法。
【請求項91】
請求項86に記載の方法であって、
少なくとも1つのドータ容器に含まれる蓄積細胞培養液内の細胞濃度を特定するステップをさらに有することを特徴とする方法。
【請求項92】
請求項86に記載の方法であって、
m個のソース容器から個別の細胞培養液をn個のドータ容器に蓄積するステップは、少なくとも1つのソース容器から細胞培養液を少なくとも2つのドータ容器に蓄積するステップを含むことを特徴とする方法。
【請求項93】
請求項86に記載の方法であって、
ドータ容器から選択された量の蓄積細胞培養液をp個のマルチウェル容器の選択されたウェルに搬送するステップは、ドータ容器から実質的に同一量の蓄積細胞培養液をマルチウェル容器の実質的にすべてのウェルに搬送するステップを有することを特徴とする方法。
【請求項94】
請求項86に記載の方法であって、
ソース容器のそれぞれは、約10mlの容量を含むことを特徴とする方法。
【請求項95】
請求項86に記載の方法であって、
ドータ容器のそれぞれは、約100mlの容量を含むことを特徴とする方法。
【請求項96】
請求項86に記載の方法であって、
第1の細胞培養液の細胞は、単一の細胞株を含むことを特徴とする方法。
【請求項97】
請求項86に記載の方法であって、
マルチウェル容器のそれぞれは、6,12,24,48,96,192,384,768,1536,3456,9600またはそれ以上のウェルを有することを特徴とする方法。
【請求項98】
請求項86に記載の方法であって、
少なくとも1つのマルチウェル容器のウェルのそれぞれは、約10mlの容量を含むことを特徴とする方法。
【請求項99】
請求項86に記載の方法であって、
nは1以上の整数であり、
少なくとも1つのソース容器から実質的に同一量をドータ容器のそれぞれに搬送するステップを有することを特徴とする方法。
【請求項100】
請求項99に記載の方法であって、
実質的に同一量は約5mlであることを特徴とする方法。
【請求項101】
請求項71に記載の方法であって、
容器から細胞培養液を搬送する前に、細胞培養液内の細胞を互いに対して、そして/または容器に対して分離させるステップをさらに有することを特徴とする方法。
【請求項102】
請求項101に記載の方法であって、
細胞培養液内の細胞を分離させるステップは、
容器を培養細胞分離機の容器ホルダに設置するステップと、
容器ホルダの第1の方向における変位を制限する第1の係止部が当接するまで、容器ホルダを第1の方向に移動させるステップと、
第1の方向とは反対方向の容器ホルダの第2の方向における変位を制限する第2の係止部が当接するまで、容器ホルダを第2の方向に移動させるステップとを有することを特徴とする方法。
【請求項103】
請求項101に記載の方法であって、
細胞培養液内の細胞を分離させるステップは、
容器ホルダの第1の方向における変位角を制限する第1の係止部が当接するまで、容器ホルダを第1の方向に回転させるステップと、
第1の方向とは反対方向の容器ホルダの第2の方向における変位角を制限する第2の係止部が当接するまで、容器ホルダを第2の方向に回転させるステップとを有することを特徴とする方法。
【請求項104】
請求項103に記載の方法であって、
容器を容器ホルダに配置する前後またはその間において、少なくとも1つの解離性試薬をソース容器に投与するステップをさらに有することを特徴とする方法。
【請求項105】
請求項103に記載の方法であって、
解離した細胞の一部を1つまたはそれ以上の最終的な容器のそれぞれに搬送することにより、培養細胞を増殖させるステップをさらに有することを特徴とする方法。
【図1】

【図2】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】

【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【図13G】
【図13H】
【図14A】

【図14B】
【図15】
【図16A】
【図16B】
【図16C】
【図16D】
【図17A】
【図17B】
【図17C】
【図17D】
【図17E】
【図17F】
【図17G】
【図17H】
【図17I】
【図17J】
【図17K】
【図18A】
【図18B】
【図18C】

【図18D】
【図19】
【図20A】
【図20B】
【図21A】
【図21B】
【図22】
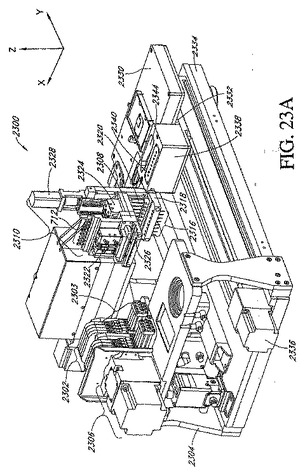
【図23A】
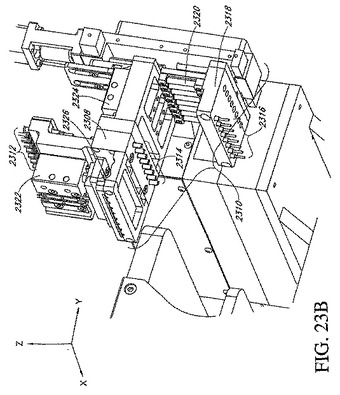
【図23B】
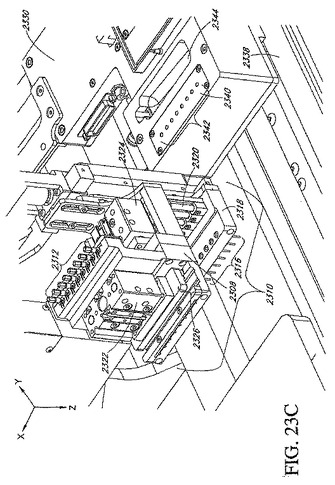
【図23C】
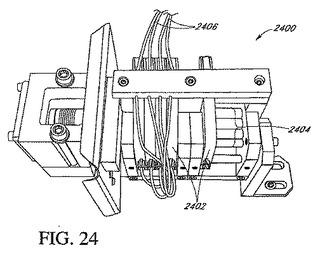
【図24】
【図25】
【図26A】
【図26B】
【図26C】
【図27A】
【図27B】
【図28A】
【図28B】
【図29A】
【図29B】
【図30A】
【図30B】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43A】
【図43B】
【図43C】
【図44】
【図45】
【図46A】
【図46B】
【図47A】
【図47B】
【図47C】
【図47D】
【図47E】
【図47F】
【図48A】
【図48B】
【図49】
【図50A】
【図50B】
【図51】
【図2】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図4E】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図12】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図13F】
【図13G】
【図13H】
【図14A】
【図14B】
【図15】
【図16A】
【図16B】
【図16C】
【図16D】
【図17A】
【図17B】
【図17C】
【図17D】
【図17E】
【図17F】
【図17G】
【図17H】
【図17I】
【図17J】
【図17K】
【図18A】
【図18B】
【図18C】
【図18D】
【図19】
【図20A】
【図20B】
【図21A】
【図21B】
【図22】
【図23A】
【図23B】
【図23C】
【図24】
【図25】
【図26A】
【図26B】
【図26C】
【図27A】
【図27B】
【図28A】
【図28B】
【図29A】
【図29B】
【図30A】
【図30B】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43A】
【図43B】
【図43C】
【図44】
【図45】
【図46A】
【図46B】
【図47A】
【図47B】
【図47C】
【図47D】
【図47E】
【図47F】
【図48A】
【図48B】
【図49】
【図50A】
【図50B】
【図51】
【公表番号】特表2008−533989(P2008−533989A)
【公表日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願番号】特願2008−503131(P2008−503131)
【出願日】平成18年3月22日(2006.3.22)
【国際出願番号】PCT/US2006/010416
【国際公開番号】WO2006/102416
【国際公開日】平成18年9月28日(2006.9.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.リナックス
【出願人】(503261524)アイアールエム・リミテッド・ライアビリティ・カンパニー (158)
【氏名又は名称原語表記】IRM,LLC
【Fターム(参考)】
【公表日】平成20年8月28日(2008.8.28)
【国際特許分類】
【出願日】平成18年3月22日(2006.3.22)
【国際出願番号】PCT/US2006/010416
【国際公開番号】WO2006/102416
【国際公開日】平成18年9月28日(2006.9.28)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.リナックス
【出願人】(503261524)アイアールエム・リミテッド・ライアビリティ・カンパニー (158)
【氏名又は名称原語表記】IRM,LLC
【Fターム(参考)】
[ Back to top ]