
化学マイクロラボシステム
【課題】
デバイスごとのばらつき,デバイスの経時変化,試験体の個体差の影響を受けにくい、マイクロラボ検査システムを提供する。
【解決手段】
外部より電圧印加が行える電極、該電極の上部に形成した絶縁膜、さらにこれらを透明な容器に格納し、試薬および試験体サンプルを外部から取り入れ可能な構造にしたデバイスと、該デバイスの中の液滴を光学的に観察する手段と、その画像データより注目する液体の形状,位置を認識する手段と、少なくとも液滴の形状,位置をシミュレーションする手段で構成し、電極への印加信号を、光学的観測結果とシミュレーション結果の偏差を基に算出し、液滴挙動を制御するマイクロラボシステム。
デバイスごとのばらつき,デバイスの経時変化,試験体の個体差の影響を受けにくい、マイクロラボ検査システムを提供する。
【解決手段】
外部より電圧印加が行える電極、該電極の上部に形成した絶縁膜、さらにこれらを透明な容器に格納し、試薬および試験体サンプルを外部から取り入れ可能な構造にしたデバイスと、該デバイスの中の液滴を光学的に観察する手段と、その画像データより注目する液体の形状,位置を認識する手段と、少なくとも液滴の形状,位置をシミュレーションする手段で構成し、電極への印加信号を、光学的観測結果とシミュレーション結果の偏差を基に算出し、液滴挙動を制御するマイクロラボシステム。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は生化学・免疫検査装置に係り、特にMEMSを活用した、極めて少ない検体サンプルで高速・高精度の検査を行えるマイクロラボシステムに関する。
【背景技術】
【0002】
試験体サンプルから、マイクロリットルあるいはピコリットルの極めて少ない量を取り出し、試験薬と反応させて生化学・免疫検査を行う技術として、MEMSを用いた化学マイクロラボチップと呼ばれるデバイスが注目されている。その中でも、EWOD
(Electro-Wetting on Dielectric) と呼ばれる技術は、微小な液滴を取り出し、それをチップ上で搬送し、試験薬と反応させ、所定の検査を行うチップで、ほんのわずかの検体サンプルでも生化学・免疫検査が可能であるため、次世代の検査技術として注目されている。
【0003】
静電力を用いて液滴を駆動するチップ(デバイス)としては、例えば特開平2004−935号公報の図2(特許文献1)に示す構成が知られている。同様の記載は、特開平
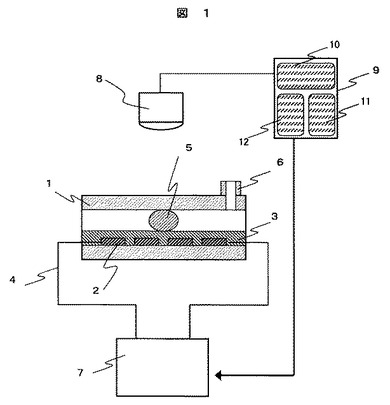
2004−22165号公報(特許文献2)にも見られる。いずれも互いに離間された電極を隣接して設置し、この電極を囲む誘電層を介して、液滴を静電力で駆動する。原理的には、この操作によって、検体サンプルから必要な量の液滴サンプルを取り出し、同様の原理で取り出した試薬と反応させ、その結果を何らかの手法で観察することによって、反応を観察することが可能である。
【0004】
【特許文献1】特開2004−935号公報
【特許文献2】特開2004−22165号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
EWODを利用したデバイスのなかで起こる現象は、一般に液的が極めて小さくなることに起因して表面張力に極めて敏感である。そのため、製造過程で完全にはコントロールできない誘電体あるいは電極,容器内面の表面状態によって、液滴の挙動が影響を受ける。その結果、デバイスごとのばらつきが無視できず、重要な課題となっている。
【0006】
また、同一デバイスであっても、デバイスが経時変化したときは、液滴の挙動が変わるため、再現性良く制御を行うことができない。さらに、医療検査では、検体の個体差があるため、この点も画一的な制御がうまくいかない一因となっている。
【0007】
仮にこれらの点を改善しようとすると、極めて高精度なデバイス製造プロセス,経時変化を起こさない表面処理技術が必要であり、結局のところ高コスト化をまねき、本来、極少サンプルで、安価に検査を提供するといったマイクロラボチップ本来の特徴を損ねる結果となる。
【0008】
そこで本発明の課題は、従来デバイスで頻発する、デバイスごとの特性ばらつき、デバイス特性の経時変化,検体差による測定ばらつきが無視できないほど大きく、測定に大きな誤差が生じる点を解消し、デバイスごとに結果のばらつきのないマイクロラボシステムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決する第1の手段は、外部より電圧印加が行える電極、該電極の上部に形成した絶縁膜、さらにこれらを透明な容器に格納し、試薬および試験体サンプルを外部から取り入れ可能な構造にしたデバイスと、該デバイスの中の液滴を光学的に観察する手段と、その画像データより注目する液体の形状,位置を認識する手段と、少なくとも液滴の形状,位置をシミュレーションする手段で構成し、電極への印加信号を、光学的観測結果とシミュレーション結果の偏差を基に算出し、液滴挙動を制御する少量液体の観察装置
(マイクロラボシステム)とすることである。
【0010】
上記課題を解決する第2の手段は、第1の手段において、液滴の形状,位置をシミュレーションする手段に、液滴の表面圧力,ぬれ張力,接触面での接触角ヒステリシスのシミュレーションするアルゴリズムを組み入れて、形状と位置の偏差をリアルタイムで演算する機能を付与することである。
【0011】
上記課題を解決する第3の手段は、上記第2の手段において、液滴の表面張力を算出する際に、液滴表面の6つの格子点から圧力を算出して表面張力を求めるアルゴリズムを用いることである。
【発明の効果】
【0012】
本発明のマイクロラボシステムを、デバイスごとの特性ばらつき、デバイス特性の経時変化,検体差による測定ばらつき少なく、わずかな検体サンプルで高精度な検査が可能である。
【発明を実施するための最良の形態】
【0013】
本発明の特徴は、光学的観測結果とシミュレーション結果との情報に基づき、それらの偏差を算出し、その偏差に基づいて液滴挙動を制御することにある。
【実施例1】
【0014】
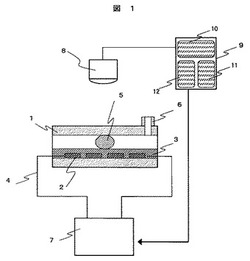
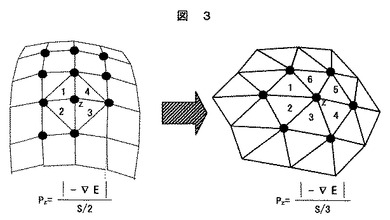
図1は、本発明装置の一構成例である。透明容器1の中に電極2とその表面に形成した絶縁体3でデバイス(マイクロラボチップ)は構成される。電極2はマスキングをしてスパッタリングあるいはゾルゲル法などによって形成し、白金,金などの貴金属で形成する。絶縁体3はSiO,SiNなどの絶縁体をスパッタリング,ゾルゲル法等で形成し、リード線4を介して電圧制御部を有する電源7から電圧印加を行う。
【0015】
透明容器1の中では、検体導入口6から容器内に導入された検体5が静電力によって搬送される。透明容器の上方には光学的観察手段8を配置し、これによって観察部8で液滴の挙動を画像として取り込むとともにデジタル信号化して制御装置9へデータを送る。
【0016】
制御装置9には認識部10,シミュレーション部11,制御部12がある。まず認識部で一般的なデジタル画像処理技術を用いて、液滴の形状と大きさを判定する。次に、シミュレーション部11で前回の(Δt前の)時刻に観測された液滴の形状,位置情報と、印加電圧の情報に基づいて液滴の現在の形状と位置を予測する。認識部(画像処理部)から送られてきた液滴の形状と位置の情報と、シミュレーション部で予測された液滴の形状と位置の情報との偏差を制御部が求める。
【0017】
制御部はその偏差が一定の値以上であれば、電圧印加信号を設定値よりも増やすあるいは減らす等の制御を行い、この処理を繰り返し、一定の偏差に収まる方向に動作の基本となる電圧を変化させる。実際の使用法においては、この演算を常に行い、偏差の算出と印加電圧の調整をリアルタイムでたえず行うことが望ましい。
【0018】
このような動作を行うことによって、従来の画一的な電圧制御ではなく、常に液滴の状態を観察しながら、リアルタイムのシミュレーションによって、液滴の現象と印加電圧値との相関を補正しながら制御することが可能になる。その結果、デバイスごとのばらつき、デバイスの経時変化,試験体の個体差の影響がかりにあったとしても、所定の液滴挙動(形状,位置制御)を実現できるので、高精度な検査が可能になる。
【実施例2】
【0019】
本発明の別の実施例を以下説明する。基本的な構成は図1と同様にする。シミュレーション部11においては、デバイスを構成する材料の物性値,液滴の物性値を入力パラメータとし、Δtごとに液滴の位置と大きさをシミュレーションによって求める。
【0020】
この実施例の特徴は、シミュレーションにおいて、液滴の表面圧力,ぬれ張力,接触面での接触角ヒステリシスのシミュレーションするアルゴリズムを組み入れて、形状と位置を算出して、偏差を演算することである。
【0021】
上述したように、マイクロラボチップにおいては、液滴がマイクロリットル、ピコリットルと極めて小さな液滴になるため、表面張力,ぬれ張力が液滴挙動のかなりの部分を支配する。そして、デバイスごとのばらつき、デバイスの経時変化といったものは、これらの差や変化によって生じるものである。従って、これらを取り込んだシミュレーションによって、初めて実測と予測と間の偏差からフィードバックが可能になる。
【0022】
例えば、ある時刻tにおいて測定した位置xを基に、現時点での位置を算出し、そこで実測との偏差が生じたとすると、シミュレーションのパラメータである表面張力,接触角等のパラメータを変化させ、現状を最も再現できるデータセットを選ぶ。これを用いて、逆解析で所定の変位を実現できる電圧を逆問題として解析し、その値を制御信号として電極へ印加する。同様の計算を繰り返し、検査をしているデバイスに最も適した電圧制御を行う。
【0023】
さらに実用的な方法としては、デバイスの検体導入部近傍に、予め液滴の動作を予備的に行う領域を設けておき、そこで上記の操作を行って、その後試験薬と反応させることも、測定精度を上げる上で有効である。
【0024】
また、ある程度偏差とフィードバックするべき電圧の増分減分の関係がわかっているなら、これらをデータセットとして準備しておき、フィードバック制御をすることも可能で、高速に高精度な制御が可能な状態へ高速に収束できる。
【0025】
本実施例によっても、デバイスごとのばらつき、デバイスの経時変化,試験体の個体差の影響を受けにくい、医療用検査装置を実現でき、わずかな試験体で高精度に高速な検査が再現性良く実現できる。
【実施例3】
【0026】
本発明の別の実施例を説明する。基本構成は図1と同様で、シミュレーション部11において演算する液滴の圧力演算部において、圧力を図のように6つの格子点から求めるサブルーチンを用いる。
【0027】
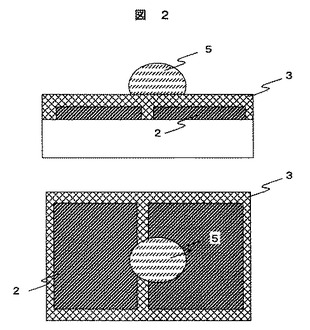
ここでまず従来の表面圧力の算出(任意形状)法について説明する。従来は図3の左の図に示す様に、4つの格子点の圧力からそれらの中間点を内挿して求めるものであった。すなわち、点(x,y,z)のポテンシャルE(X,Y,Z)と格子点Iで代表される部分の面積をSiとした時に、
E(X,Y,Z)=νS
S=ΣSi
P=│−∇E│/S/2
Si:iでの圧力
ν:表面張力
P:圧力
この場合、圧力の演算誤差が大きく、表面張力が支配的なマイクロラボチップ内部の液滴挙動をリアルタイムで再現することはできなかった。
【0028】
本実施例では、図3の右のように、6つの点から内部の圧力を算出する方法を採用した。この場合、
P=│−∇E│/(S/3)
で与えられ、6つの点の中央部の演算誤差は0.01% 以下である。これによって、同一精度を得ようとすると、従来に比べて1000倍の速度で演算できるようになり、マイクロラボチップ内部の液滴のシミュレーションがリアルタイムでできるようになった。
【0029】
本発明によってもデバイスごとのばらつき,デバイスの経時変化,試験体の個体差の影響を受けにくい、医療用検査装置を実現でき、わずかな試験体で高精度に高速な検査が再現性良く実現できる。
【産業上の利用可能性】
【0030】
本発明のマイクロラボ検査システムは、わずかな検体でも高精度な検査を可能にする生化学・免疫検査システムに適用できる。
【図面の簡単な説明】
【0031】
【図1】本発明の基本構成図である。(実施例1)
【図2】従来技術の説明図である。
【図3】本発明の演算部の特徴を示す図。(実施例3)
【符号の説明】
【0032】
1…透明容器、2…電極、3…絶縁体、4…リード線、5…検体(試験体及び試薬)、6…検体導入口、7…電源、8…光学的観察手段(観察部)、9…制御装置、10…認識部、11…シミュレーション部、12…制御部。
【技術分野】
【0001】
本発明は生化学・免疫検査装置に係り、特にMEMSを活用した、極めて少ない検体サンプルで高速・高精度の検査を行えるマイクロラボシステムに関する。
【背景技術】
【0002】
試験体サンプルから、マイクロリットルあるいはピコリットルの極めて少ない量を取り出し、試験薬と反応させて生化学・免疫検査を行う技術として、MEMSを用いた化学マイクロラボチップと呼ばれるデバイスが注目されている。その中でも、EWOD
(Electro-Wetting on Dielectric) と呼ばれる技術は、微小な液滴を取り出し、それをチップ上で搬送し、試験薬と反応させ、所定の検査を行うチップで、ほんのわずかの検体サンプルでも生化学・免疫検査が可能であるため、次世代の検査技術として注目されている。
【0003】
静電力を用いて液滴を駆動するチップ(デバイス)としては、例えば特開平2004−935号公報の図2(特許文献1)に示す構成が知られている。同様の記載は、特開平
2004−22165号公報(特許文献2)にも見られる。いずれも互いに離間された電極を隣接して設置し、この電極を囲む誘電層を介して、液滴を静電力で駆動する。原理的には、この操作によって、検体サンプルから必要な量の液滴サンプルを取り出し、同様の原理で取り出した試薬と反応させ、その結果を何らかの手法で観察することによって、反応を観察することが可能である。
【0004】
【特許文献1】特開2004−935号公報
【特許文献2】特開2004−22165号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
EWODを利用したデバイスのなかで起こる現象は、一般に液的が極めて小さくなることに起因して表面張力に極めて敏感である。そのため、製造過程で完全にはコントロールできない誘電体あるいは電極,容器内面の表面状態によって、液滴の挙動が影響を受ける。その結果、デバイスごとのばらつきが無視できず、重要な課題となっている。
【0006】
また、同一デバイスであっても、デバイスが経時変化したときは、液滴の挙動が変わるため、再現性良く制御を行うことができない。さらに、医療検査では、検体の個体差があるため、この点も画一的な制御がうまくいかない一因となっている。
【0007】
仮にこれらの点を改善しようとすると、極めて高精度なデバイス製造プロセス,経時変化を起こさない表面処理技術が必要であり、結局のところ高コスト化をまねき、本来、極少サンプルで、安価に検査を提供するといったマイクロラボチップ本来の特徴を損ねる結果となる。
【0008】
そこで本発明の課題は、従来デバイスで頻発する、デバイスごとの特性ばらつき、デバイス特性の経時変化,検体差による測定ばらつきが無視できないほど大きく、測定に大きな誤差が生じる点を解消し、デバイスごとに結果のばらつきのないマイクロラボシステムを提供することにある。
【課題を解決するための手段】
【0009】
上記課題を解決する第1の手段は、外部より電圧印加が行える電極、該電極の上部に形成した絶縁膜、さらにこれらを透明な容器に格納し、試薬および試験体サンプルを外部から取り入れ可能な構造にしたデバイスと、該デバイスの中の液滴を光学的に観察する手段と、その画像データより注目する液体の形状,位置を認識する手段と、少なくとも液滴の形状,位置をシミュレーションする手段で構成し、電極への印加信号を、光学的観測結果とシミュレーション結果の偏差を基に算出し、液滴挙動を制御する少量液体の観察装置
(マイクロラボシステム)とすることである。
【0010】
上記課題を解決する第2の手段は、第1の手段において、液滴の形状,位置をシミュレーションする手段に、液滴の表面圧力,ぬれ張力,接触面での接触角ヒステリシスのシミュレーションするアルゴリズムを組み入れて、形状と位置の偏差をリアルタイムで演算する機能を付与することである。
【0011】
上記課題を解決する第3の手段は、上記第2の手段において、液滴の表面張力を算出する際に、液滴表面の6つの格子点から圧力を算出して表面張力を求めるアルゴリズムを用いることである。
【発明の効果】
【0012】
本発明のマイクロラボシステムを、デバイスごとの特性ばらつき、デバイス特性の経時変化,検体差による測定ばらつき少なく、わずかな検体サンプルで高精度な検査が可能である。
【発明を実施するための最良の形態】
【0013】
本発明の特徴は、光学的観測結果とシミュレーション結果との情報に基づき、それらの偏差を算出し、その偏差に基づいて液滴挙動を制御することにある。
【実施例1】
【0014】
図1は、本発明装置の一構成例である。透明容器1の中に電極2とその表面に形成した絶縁体3でデバイス(マイクロラボチップ)は構成される。電極2はマスキングをしてスパッタリングあるいはゾルゲル法などによって形成し、白金,金などの貴金属で形成する。絶縁体3はSiO,SiNなどの絶縁体をスパッタリング,ゾルゲル法等で形成し、リード線4を介して電圧制御部を有する電源7から電圧印加を行う。
【0015】
透明容器1の中では、検体導入口6から容器内に導入された検体5が静電力によって搬送される。透明容器の上方には光学的観察手段8を配置し、これによって観察部8で液滴の挙動を画像として取り込むとともにデジタル信号化して制御装置9へデータを送る。
【0016】
制御装置9には認識部10,シミュレーション部11,制御部12がある。まず認識部で一般的なデジタル画像処理技術を用いて、液滴の形状と大きさを判定する。次に、シミュレーション部11で前回の(Δt前の)時刻に観測された液滴の形状,位置情報と、印加電圧の情報に基づいて液滴の現在の形状と位置を予測する。認識部(画像処理部)から送られてきた液滴の形状と位置の情報と、シミュレーション部で予測された液滴の形状と位置の情報との偏差を制御部が求める。
【0017】
制御部はその偏差が一定の値以上であれば、電圧印加信号を設定値よりも増やすあるいは減らす等の制御を行い、この処理を繰り返し、一定の偏差に収まる方向に動作の基本となる電圧を変化させる。実際の使用法においては、この演算を常に行い、偏差の算出と印加電圧の調整をリアルタイムでたえず行うことが望ましい。
【0018】
このような動作を行うことによって、従来の画一的な電圧制御ではなく、常に液滴の状態を観察しながら、リアルタイムのシミュレーションによって、液滴の現象と印加電圧値との相関を補正しながら制御することが可能になる。その結果、デバイスごとのばらつき、デバイスの経時変化,試験体の個体差の影響がかりにあったとしても、所定の液滴挙動(形状,位置制御)を実現できるので、高精度な検査が可能になる。
【実施例2】
【0019】
本発明の別の実施例を以下説明する。基本的な構成は図1と同様にする。シミュレーション部11においては、デバイスを構成する材料の物性値,液滴の物性値を入力パラメータとし、Δtごとに液滴の位置と大きさをシミュレーションによって求める。
【0020】
この実施例の特徴は、シミュレーションにおいて、液滴の表面圧力,ぬれ張力,接触面での接触角ヒステリシスのシミュレーションするアルゴリズムを組み入れて、形状と位置を算出して、偏差を演算することである。
【0021】
上述したように、マイクロラボチップにおいては、液滴がマイクロリットル、ピコリットルと極めて小さな液滴になるため、表面張力,ぬれ張力が液滴挙動のかなりの部分を支配する。そして、デバイスごとのばらつき、デバイスの経時変化といったものは、これらの差や変化によって生じるものである。従って、これらを取り込んだシミュレーションによって、初めて実測と予測と間の偏差からフィードバックが可能になる。
【0022】
例えば、ある時刻tにおいて測定した位置xを基に、現時点での位置を算出し、そこで実測との偏差が生じたとすると、シミュレーションのパラメータである表面張力,接触角等のパラメータを変化させ、現状を最も再現できるデータセットを選ぶ。これを用いて、逆解析で所定の変位を実現できる電圧を逆問題として解析し、その値を制御信号として電極へ印加する。同様の計算を繰り返し、検査をしているデバイスに最も適した電圧制御を行う。
【0023】
さらに実用的な方法としては、デバイスの検体導入部近傍に、予め液滴の動作を予備的に行う領域を設けておき、そこで上記の操作を行って、その後試験薬と反応させることも、測定精度を上げる上で有効である。
【0024】
また、ある程度偏差とフィードバックするべき電圧の増分減分の関係がわかっているなら、これらをデータセットとして準備しておき、フィードバック制御をすることも可能で、高速に高精度な制御が可能な状態へ高速に収束できる。
【0025】
本実施例によっても、デバイスごとのばらつき、デバイスの経時変化,試験体の個体差の影響を受けにくい、医療用検査装置を実現でき、わずかな試験体で高精度に高速な検査が再現性良く実現できる。
【実施例3】
【0026】
本発明の別の実施例を説明する。基本構成は図1と同様で、シミュレーション部11において演算する液滴の圧力演算部において、圧力を図のように6つの格子点から求めるサブルーチンを用いる。
【0027】
ここでまず従来の表面圧力の算出(任意形状)法について説明する。従来は図3の左の図に示す様に、4つの格子点の圧力からそれらの中間点を内挿して求めるものであった。すなわち、点(x,y,z)のポテンシャルE(X,Y,Z)と格子点Iで代表される部分の面積をSiとした時に、
E(X,Y,Z)=νS
S=ΣSi
P=│−∇E│/S/2
Si:iでの圧力
ν:表面張力
P:圧力
この場合、圧力の演算誤差が大きく、表面張力が支配的なマイクロラボチップ内部の液滴挙動をリアルタイムで再現することはできなかった。
【0028】
本実施例では、図3の右のように、6つの点から内部の圧力を算出する方法を採用した。この場合、
P=│−∇E│/(S/3)
で与えられ、6つの点の中央部の演算誤差は0.01% 以下である。これによって、同一精度を得ようとすると、従来に比べて1000倍の速度で演算できるようになり、マイクロラボチップ内部の液滴のシミュレーションがリアルタイムでできるようになった。
【0029】
本発明によってもデバイスごとのばらつき,デバイスの経時変化,試験体の個体差の影響を受けにくい、医療用検査装置を実現でき、わずかな試験体で高精度に高速な検査が再現性良く実現できる。
【産業上の利用可能性】
【0030】
本発明のマイクロラボ検査システムは、わずかな検体でも高精度な検査を可能にする生化学・免疫検査システムに適用できる。
【図面の簡単な説明】
【0031】
【図1】本発明の基本構成図である。(実施例1)
【図2】従来技術の説明図である。
【図3】本発明の演算部の特徴を示す図。(実施例3)
【符号の説明】
【0032】
1…透明容器、2…電極、3…絶縁体、4…リード線、5…検体(試験体及び試薬)、6…検体導入口、7…電源、8…光学的観察手段(観察部)、9…制御装置、10…認識部、11…シミュレーション部、12…制御部。
【特許請求の範囲】
【請求項1】
外部より電圧印加を行う電極と、該電極に接して設けられる絶縁膜と、前記電極及び絶縁膜と、内部に試薬および試験体を格納可能な容器とを有するデバイス部と、液状の該試験体を光学的手段により観察する観察部と、前記観察部より得られる情報に基づき前記液状の試験体の形状及び位置を認識する認識部と、前記液状の試験体の形状及び位置をシミュレーションするシミュレーション部を有し、
前記認識部及びシミュレーション部から得られる情報に基づいて前記電極への電圧印加を制御する制御部を有することを特徴とするマイクロラボシステム。
【請求項2】
請求項1において、前記シミュレーション部は試験体の表面張力,ぬれ張力,接触面での接触角ヒステリシスを使用するアルゴリズムを有することを特徴とするマイクロラボシステム。
【請求項3】
請求項2において、前記シミュレーション部は試験体の表面張力を試験体表面の6つの格子点より算出するアルゴリズムを有することを特徴とするマイクロラボシステム。
【請求項1】
外部より電圧印加を行う電極と、該電極に接して設けられる絶縁膜と、前記電極及び絶縁膜と、内部に試薬および試験体を格納可能な容器とを有するデバイス部と、液状の該試験体を光学的手段により観察する観察部と、前記観察部より得られる情報に基づき前記液状の試験体の形状及び位置を認識する認識部と、前記液状の試験体の形状及び位置をシミュレーションするシミュレーション部を有し、
前記認識部及びシミュレーション部から得られる情報に基づいて前記電極への電圧印加を制御する制御部を有することを特徴とするマイクロラボシステム。
【請求項2】
請求項1において、前記シミュレーション部は試験体の表面張力,ぬれ張力,接触面での接触角ヒステリシスを使用するアルゴリズムを有することを特徴とするマイクロラボシステム。
【請求項3】
請求項2において、前記シミュレーション部は試験体の表面張力を試験体表面の6つの格子点より算出するアルゴリズムを有することを特徴とするマイクロラボシステム。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2007−93496(P2007−93496A)
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願番号】特願2005−285825(P2005−285825)
【出願日】平成17年9月30日(2005.9.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成19年4月12日(2007.4.12)
【国際特許分類】
【出願日】平成17年9月30日(2005.9.30)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]