
医用画像表示装置
【課題】読影に要する読影時間及び読影者の労力的な負担を減らす。
【解決手段】医用画像表示装置4は、器官内撮像装置の一例であるカプセル内視鏡2により撮像された複数の画像と、画像ごとのカプセル内視鏡2の撮像位置及び撮像姿勢を取得する取得部4cと、器官をその延伸方向に沿って複数の領域に分割する領域分割部13と、画像ごとにカプセル内視鏡2の撮像位置及び撮像姿勢を用いて器官に対する画像の位置を決定し、複数の領域に対して複数の画像を分類する画像分類部14と、画像ごとに画像の特徴量を抽出し、領域ごとに画像の特徴量に応じて領域内の各画像の優先度を決定する優先度決定部15と、領域ごとに領域内の各画像の優先度に応じて領域内の複数の画像を並べた表示画像を生成する画像生成部16と、その分布画像を表示する表示部4eとを備える。
【解決手段】医用画像表示装置4は、器官内撮像装置の一例であるカプセル内視鏡2により撮像された複数の画像と、画像ごとのカプセル内視鏡2の撮像位置及び撮像姿勢を取得する取得部4cと、器官をその延伸方向に沿って複数の領域に分割する領域分割部13と、画像ごとにカプセル内視鏡2の撮像位置及び撮像姿勢を用いて器官に対する画像の位置を決定し、複数の領域に対して複数の画像を分類する画像分類部14と、画像ごとに画像の特徴量を抽出し、領域ごとに画像の特徴量に応じて領域内の各画像の優先度を決定する優先度決定部15と、領域ごとに領域内の各画像の優先度に応じて領域内の複数の画像を並べた表示画像を生成する画像生成部16と、その分布画像を表示する表示部4eとを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、医用画像表示装置に関し、例えば、カプセル内視鏡により撮像された医用画像を表示する医用画像表示装置に関する。
【背景技術】
【0002】
近年、管状の器官の一例である消化管を対象としたカプセル内視鏡が実用化されている。このカプセル内視鏡は、主に、体腔内の画像(医用画像)を撮像するCCDカメラなどの撮像部や体腔内部を明るくするLEDなどの照明部、撮影した画像情報を体外の受信装置に送るための送信部、これらの各部に電力を供給するボタン電池などの電源部を備えている。
【0003】
このようなカプセル内視境は、被験者に経口投与されてから各消化管の主に蠕動運動により肛門から自然に排出されるまで、約8時間から10時間の間に数枚/秒の体腔内画像を撮影する。例えば、1秒間に2枚の画像を8時間撮影したとすると、5万7千600枚もの画像が一回の検査で撮像されることになる。
【0004】
このように一回の検査で取得される画像枚数は大量であり、今後さらに増える傾向にある。このため、読影者の負担は今以上に大きくなることから、読影を支援する表示装置及びソフトの開発が行われている。例えば、読影の操作性及び効率の向上を目的に、時系列で撮像した内視鏡画像から、内視鏡の位置に基づいた診断画像を生成する方法、あるいは、内視鏡画像を領域分割して変形し、その変形画像を二次元や三次元のモデル上に貼り付けて診断画像を生成する方法が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−240000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前述のように、時系列の内視鏡位置に基づいて診断画像を生成することや内視鏡画像を領域分割して変形し、診断画像を生成することは、診断に使用する画像枚数を減らす効果をもたらすが、一方で、読影者が診断画像内の特徴領域や特徴量を確認することを難しくする。また、診断画像の生成に使われた画像や指定した特徴以外の病理所見の漏れがないかを確認することが不可能となる。このため、読影に要する読影時間が長くなってしまい、さらに、読影者の労力的な負担も増加してしまう。
【0007】
本発明が解決しようとする課題は、読影に要する読影時間及び読影者の労力的な負担を減らすことができる医用画像表示装置を提供することである。
【課題を解決するための手段】
【0008】
実施形態に係る医用画像表示装置は、管状の器官内を移動して時系列で撮像する器官内撮像装置により撮像された複数の画像と、画像ごとの器官内撮像装置の撮像位置及び撮像姿勢を取得する取得部と、器官をその延伸方向に沿って複数の領域に分割する領域分割部と、画像ごとに器官内撮像装置の撮像位置及び撮像姿勢を用いて器官に対する画像の位置を決定し、複数の領域に対して複数の画像を分類する画像分類部と、画像ごとに画像の特徴量を抽出し、領域ごとに画像の特徴量に応じて領域内の各画像の優先度を決定する優先度決定部と、領域ごとに領域内の各画像の優先度に応じて領域内の複数の画像を並べた表示画像を生成する画像生成部と、表示画像を表示する表示部とを備える。
【図面の簡単な説明】
【0009】
【図1】実施形態に係るカプセル内視鏡検査システムの概略構成を示すブロック図である。
【図2】図1に示すカプセル内視鏡検査システムの医用画像表示装置が行う画像表示処理の流れを示すフローチャートである。
【図3】カプセル内視鏡の軌跡及び撮像方向の算出を説明するための説明図である。
【図4】消化管モデルの生成及びカプセル内視鏡の撮像領域の算出を説明するための説明図である。
【図5】消化管モデルの領域分割を説明するための説明図である。
【図6】第1のヒストグラム画像を含む内視鏡検査画面の一例を示す図である。
【図7】第2のヒストグラム画像を含む内視鏡検査画面の一例を示す図である。
【発明を実施するための形態】
【0010】
本発明の実施形態について図面を参照して説明する。
【0011】
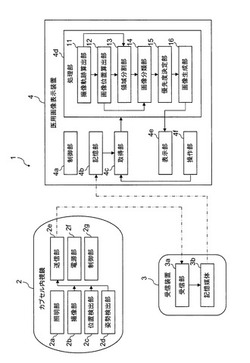
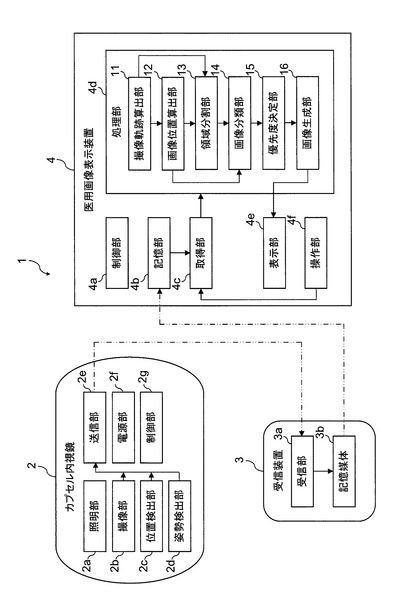
図1に示すように、本実施形態に係るカプセル内視鏡検査システム1は、管状の器官内を撮像する器官内撮像装置の一例であるカプセル内視鏡2と、そのカプセル内視鏡2からのデータを受信する受信装置3と、その受信装置3のデータに基づいて器官内の医用画像を表示する医用画像表示装置4とを備えている。
【0012】
カプセル内視鏡2は、管状の器官(例えば、消化管)内を照らす照明部2aと、管状の器官内を撮像する撮像部2bと、カプセル内視鏡2の撮像位置を検出する位置検出部2cと、その撮像位置でのカプセル内視鏡2の撮像姿勢を検出する姿勢検出部2dと、撮像した画像や撮像位置、撮像姿勢などの情報を体外の受信装置3に送信する送信部2eと、それら各部に電力を供給する電源部2fと、各部を制御する制御部2gとを備えている。これらの各部はカプセル筺体内に封入されている。
【0013】
照明部2aは、撮像部2bによる撮像が可能に管状の器官内に光を照射する照明装置である。この照明部2aとしては、例えばLED(発光ダイオード)などが用いられる。なお、カプセル筺体は、内蔵する照明部2aにより器官の内壁に光照射を可能に、例えば先端部分を透明にして形成されている。
【0014】
撮像部2bは、一定の時間間隔(一定の周期)の時系列で撮像を行う撮像装置である。この撮像部2bとしては、例えばCCD(電荷結合素子)カメラなどが用いられる。なお、カプセル筺体は、前述の照明部2aの光照射に加え、内蔵する撮像部2bにより器官の内壁を撮像可能に、例えば、前述のように先端部分を透明にして形成されている。
【0015】
位置検出部2cは、撮像部2bの撮像と同期してカプセル内視鏡2の撮像位置を検出する検出装置である。この撮像位置は、カプセル内視鏡2の空間的な位置であり、X軸、Y軸及びZ軸により決定される。この空間的な位置検出に関しては、例えば、電磁波の強弱を用いた位置検出手段、あるいは、カプセル内視鏡2に内蔵された小型のGPS(全地球測位システム)を用いた位置検出手段など、様々な位置検出手段を用いることが可能である。
【0016】
姿勢検出部2dは、撮像部2bの撮像と同期して前述の撮像位置と共に、その撮像位置でのカプセル内視鏡2の撮像姿勢を検出する検出装置である。この姿勢検出部2dとしては、例えば、加速度センサやジャイロセンサなどを用いた姿勢検出部など、様々な姿勢検出部を用いることが可能である。
【0017】
送信部2eは、撮像部2bにより撮像された画像と、位置検出部2cにより検出されたカプセル内視鏡2の撮像位置及び姿勢検出部2dにより検出されたカプセル内視鏡2の撮像姿勢とを含む情報を無線で受信装置3に送信する送信装置である。この送信部2eとしては、例えば送信アンテナなどが用いられる。
【0018】
電源部2fは、各部に電力を供給する電力供給装置である。この電源部2fとしては、例えばボタン型の電池などが用いられる。なお、電池は、8時間から10時間程度の検査時間に対応するため、必要とする容量に応じて複数個設けられる。
【0019】
制御部2gは、照明部2aにより器官内を照射しながら撮像部2bにより一定の時間間隔(一定の周期)で器官の内壁を撮像する制御を行う。さらに、制御部2gは、撮像部2bにより撮像した画像、位置検出部2cにより検出した撮像位置、さらに、姿勢検出部2dにより検出した撮像姿勢を含む情報を順次、送信部2eにより受信装置3に送信する制御を行う。
【0020】
このカプセル内視鏡2が患者によって飲み込まれると、カプセル内視鏡2は管状の器官内を蠕動運動により進みながら、一定の時間間隔(一定の周期)で撮像を行う。この撮像では、電源部2fからの電力により照射光が照明部2aから器官の内壁に照射され、その内壁により反射された反射光は撮像部2bにより光電変換され、画像データが生成される。このとき、位置検出部2cでは、画像データの生成と同期してカプセル内視鏡2の撮像位置が検出され、同様に、姿勢検出部2dでも、画像データの生成と同期してカプセル内視鏡2の撮像姿勢が検出される。これらの画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢が送信部2eにより無線通信で患者の体外にある受信装置3に送信される。画像データの生成、位置検出部2cによる撮像位置の検出、姿勢検出部2dによる撮像姿勢の検出及びデータの送信は、制御部2gによる制御の下、一定の時間間隔(例えば、数フレーム/秒)で行われる。
【0021】
受信装置3は、カプセル内視鏡2から送信された情報を無線で受信する受信アンテナなどの受信部3aと、その受信した情報を記憶するフラッシュメモリなどの記憶媒体3bとを備えている。この受信装置3では、前述のカプセル内視鏡2から送信された情報、すなわち画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢を含む情報が受信され、順次、記憶媒体3bに格納される。なお、記憶媒体3bは着脱可能であり、この記憶媒体3bが医用画像表示装置4に装着され、記憶媒体3b内の全情報が医用画像表示装置4に入力されることになる。
【0022】
医用画像表示装置4は、各部を集中的に制御する制御部4aと、各種プログラムや各種データなどを記憶する記憶部4bと、その記憶部4bから各種データを取得する取得部4cと、各種処理を行う処理部4dと、各種画像を表示する表示部4eと、医師などのユーザ(利用者)からの入力操作を受け付ける操作部4fとを備えている。この医用画像表示装置4はワークステーションとして機能する。
【0023】
制御部4aは、記憶部4bに記憶された各種プログラムや各種データなどに基づいて各部を制御する。さらに、制御部4aは、記憶部4bに記憶された各種プログラムや各種データに基づいて一連のデータ処理などを実行する。
【0024】
記憶部4bは、制御部4aのワークエリアとして機能するメモリに加え、各種プログラム及び各種データを記憶するメモリなどを有している。これらのメモリとしては、例えばROMやRAM、磁気ディスク装置(HDD)、フラッシュメモリ(半導体ディスク装置)などが用いられる。この記憶部4bには、受信装置3の記憶媒体3b内の全情報、すなわち全画像分の画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢を含む情報が記憶される。
【0025】
取得部4cは、記憶部4bから画像ごとに、画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢などの情報を取得し、処理部4dに送信する。なお、情報の取得は、例えば、医師などのユーザが操作部4fを入力操作して、処理部4dによる処理の実行を指示することに応じて行われる。
【0026】
処理部4dは、カプセル内視鏡2の軌跡及び撮像方向を算出する撮像軌跡算出部11と、管状の器官に対する画像の位置を算出する画像位置算出部12と、器官を延伸方向に沿って複数の領域に分割する領域分割部13と、分割した各領域に対して複数の画像(内視鏡画像)を分類する画像分類部14と、領域ごとに画像の優先度を決定する優先度決定部15と、ヒストグラム画像や合成画像(診断画像)などの各種画像を生成する画像生成部16とを備えている。
【0027】
撮像軌跡算出部11は、取得部4cから画像ごとのカプセル内視鏡2の撮像位置及び撮像姿勢に関する情報を受信し、それらの情報に応じてカプセル内視鏡2の軌跡及び撮像方向を算出し、画像位置算出部12に出力する。なお、撮像位置及び撮像姿勢に関する情報は、撮像された画像枚数に相当する時系列の位置データである。
【0028】
画像位置算出部12は、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡及び撮像方向に基づいて管状の器官(例えば、消化管など)に対する画像の位置を算出する。例えば、画像位置算出部12は、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡に基づいて、その軌跡を芯線として任意の管径を持つ仮想器官である器官モデル(例えば、消化管モデルなど)を作成し、カプセル内視鏡2の撮像位置及び撮像方向から器官の内壁上の撮像領域を求め、その撮像領域の位置からその器官モデルに対する画像の位置を特定する。
【0029】
領域分割部13は、画像位置算出部12により作成された器官モデルをその延伸方向、すなわちカプセル内視鏡2の軌跡に沿って任意の距離(例えば、所定間隔あるいは所望の間隔)で複数の領域に分割する。この領域分割では、撮像軌跡算出部11により算出されたカプセル内視鏡2の軌跡を用いて、器官モデルの延伸方向の位置を基準に器官モデルを分割する。
【0030】
画像分類部14は、画像位置算出部12により得られた器官モデルに対する画像の位置情報を用いて、領域分割部13により分割された領域ごとに、その領域内に存在(該当)する画像を抽出し、その領域に属する画像群として分類する。なお、画像はその領域に一枚だけ存在する場合や存在しない場合もある。
【0031】
優先度決定部15は、ユーザによって指定された特徴に基づき、画像に対して特徴抽出を行い、その特徴量に応じて前述の領域ごとに画像群の個々(領域内の各画像)の優先度(例えば、画像を表示する優先度)、すなわち優先順位を決定する。例えば、体腔内部の出血の指標として用いられる赤色具合(色調:赤)が特徴として指定されると、各領域の画像は、特徴量である赤色具合が多い程、画像の優先度が高く設定される。なお、特徴量としては、色の具合(程度)以外にも、その色の具合(濃度)に加え、その色部分(色領域)の面積などを用いることも可能であり、さらに、それらの値をかけ合わせた数値(濃度×色領域)を用いることも可能である。
【0032】
画像生成部16は、領域分割部13により分割された領域単位で、その領域に分類された複数の画像である画像群を、器官の進行方向の位置順もしくは撮像された時間順に並び替え、さらに、その領域ごとの画像群を各領域が並ぶ順番に並べ一覧画像を生成し、すなわち、器官の延伸方向の位置を横軸に、各領域に分類された画像群(もしくは枚数)を縦軸としてヒストグラム状に並べ、第1のヒストグラム画像を生成する。また、画像生成部16は、前述の並び替えを優先度の高い順にかえて前述同様に処理を行って一覧画像、すなわち、優先度に基づく第2のヒストグラム画像(表示画像)も生成する。さらに、画像生成部16は、ユーザによって指定された領域内の画像群を用いて、その領域内の任意方向の画像を合成し、診断画像となる合成画像を生成する。
【0033】
なお、前述の処理部4dは、電気回路などのハードウエアで構成されても良く、あるいは、これらの機能を実行するプログラムなどのソフトウエアで構成されても良く、また、それらの両方の組合せにより構成されても良い。
【0034】
表示部4eは、処理部4dから送信されたヒストグラム画像や合成画像、その他画像など、各種画像をカラー表示する表示装置である。この表示部4eとしては、例えば液晶ディスプレイやCRT(Cathode Ray Tube)ディスプレイなどが用いられる。
【0035】
操作部4fは、医師などのユーザにより入力操作され、画像表示や画像の切り替え、設定変更などの各種の入力操作を受け付ける入力部である。この操作部4fとしては、例えばマウスやキーボードなどの入力デバイスが用いられる。
【0036】
次に、前述の医用画像表示装置4が行う画像表示処理について詳しく説明する。医師などのユーザが操作部4fを入力操作して画像表示処理の実行を指示すると、以下の処理が実行される。なお、ここでは、管状の器官の一例として消化管(例えば、腸管)に対する処理について説明する。
【0037】
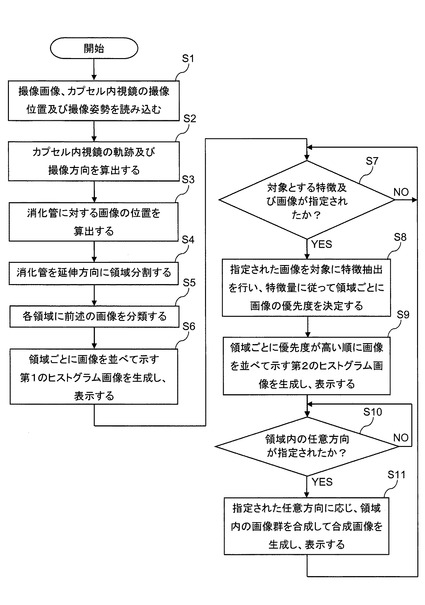
図2に示すように、まず、取得部4cでは、記憶部4bからカプセル内視鏡2により撮像された撮像画像、そのカプセル内視鏡2の撮像位置及び撮像姿勢を読み込む(ステップS1)。
【0038】
このステップS1では、カプセル内視鏡2により撮像された全画像が記憶部4bから読み込まれ、さらに、カプセル内視鏡2の撮像位置及び撮像姿勢も記憶部4bから全画像分読み込まれる。
【0039】
ステップS1の処理後、処理部4dの撮像軌跡算出部11では、取得部4cにより読み込まれたカプセル内視鏡2の撮像位置及び撮像姿勢を用いて、カプセル内視鏡2の軌跡及び撮像方向を算出する(ステップS2)。
【0040】
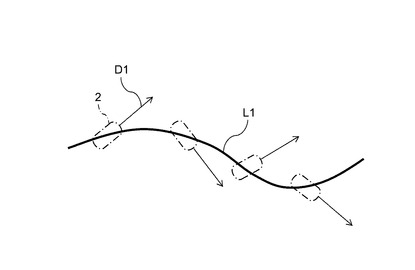
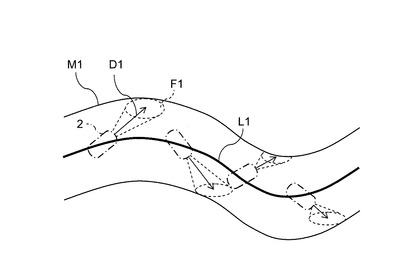
このステップS2では、図3に示すように、まず、取得部4cにより読み込まれたカプセル内視鏡2の撮像位置を時系列にたどり、カプセル内視鏡2の軌跡L1を算出し、さらに、取得部4cにより読み込まれたカプセル内視鏡2の撮像姿勢を用いて、そのカプセル内視鏡2の軌跡L1に沿った各撮像位置でカプセル内視鏡2が向いていた方向を撮像方向D1として算出する。
【0041】
図2に戻り、ステップS2の処理後、処理部4dの画像位置算出部12では、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡L1及び撮像方向D1を用いて、消化管に対する画像の位置を算出する(ステップS3)。
【0042】
このステップS3では、図4に示すように、まず、撮像軌跡算出部11で算出されたカプセル内視鏡2の軌跡L1を芯線(中心線)とし、任意の管径を持つ消化管モデルM1を作成する。次に、カプセル内視鏡2の撮像位置(画像を撮像したときの位置)とその撮像位置での撮像方向D1から消化管モデルM1の内壁上の撮像領域F1を求め、その撮像領域F1の位置に応じて、撮像された画像が消化管モデルM1上のどこに位置しているか推定し、消化管モデルM1と画像との位置を対応付けすることで、消化管に対する画像の位置を特定する。
【0043】
前述の消化管モデルM1の生成では、消化管モデルM1の管径を算出するため、例えば消化管の太さ(年齢や体格に応じた平均的な太さ、あるいは、他の検査から得られた患者固有の太さ)などの情報が用いられる。この情報は予め記憶部4bに記憶されている。また、撮像領域F1の算出では、前述の消化管の太さなどの情報に加え、カプセル内視鏡2の視野角の情報も用いられる。この視野角の情報は前述の消化管の太さなどの情報と共に予め記憶部4bに記憶されている。例えば、撮像領域F1を算出する際には、前述の消化管の太さなどの情報を用いて撮像位置から消化管の内壁までの撮像方向D1に沿った距離(被写体距離)を算出し、その被写体距離と前述の視野角に基づいて、撮像視野、すなわち撮像領域F1を求める。
【0044】
ここで、前述の消化管モデルM1の作成において、カプセル内視鏡2が同じ位置で方向を変えて滞留し、軌跡L1が同じ場所で上下左右に移動する場合には、平均位置もしくは中心位置を芯線上の点として算出し直して用いても良い。また、消化管モデルM1の管径を算出する場合には、前述の消化管の太さ情報ではなく、同じ場所でカプセル内視鏡2が移動する場合の移動可能な上下及び左右の範囲で推測しても良い。また、撮像画像の位置算出においては、周辺の画像と画像内の形状などの特徴を用いて位置の補正を行っても良い。
【0045】
図2に戻り、ステップS3の処理後、処理部4dの領域分割部13では、画像位置算出部12により作成された消化管モデルM1を延伸方向に沿って任意の距離で領域分割する(ステップS4)。
【0046】
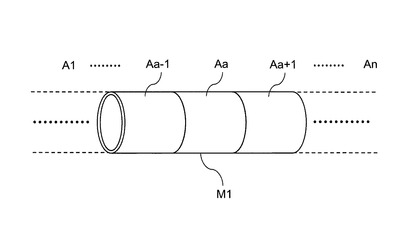
このステップS4では、図5に示すように、作成された消化管モデルM1をその延伸方向、すなわちカプセル内視鏡2の軌跡L1に沿って任意の距離、例えば、所定の等間隔で領域分割する。これにより、消化管モデルM1は複数の領域An(nは自然数である)に分割されることになる。なお、この領域分割は、ユーザにより分割位置(例えば、分割間隔など)が変更されると、再度行われる。
【0047】
図2に戻り、ステップS4の処理後、処理部4dの画像分類部14では、領域分割部13により分割された各領域Anに対し、取得部4cにより読み込まれた画像を分類する(ステップS5)。
【0048】
このステップS5では、画像位置算出部12により得られた消化管モデルM1に対する画像の位置情報を基に、分割された領域Anごとに、その領域An内に存在する画像を抽出し、その領域Anに属する画像群として分類する。ただし、画像はその領域に一枚だけ存在する場合や存在しない場合もある。なお、この画像分類は、前述の領域分割が再度行われると、それに応じて再度行われる。
【0049】
ここで、前述の画像分類において、ある画像の撮像領域F1が複数の領域Anに属する場合(例えば、二つの領域Anにまたがる場合)には、両方にもしくは領域Anを占める割合が大きい方に分類されるなどの処理が行われる。なお、この分類の際の境界条件はユーザにより任意に指定されるようにしても良い。
【0050】
ステップS5の処理後、処理部4dの画像生成部16では、消化管の延伸方向の位置を基準に、領域Anごとに画像G1aを並べて示す第1のヒストグラム画像G1を生成し、表示部4eでは、その第1のヒストグラム画像G1を表示する(ステップS6)。
【0051】
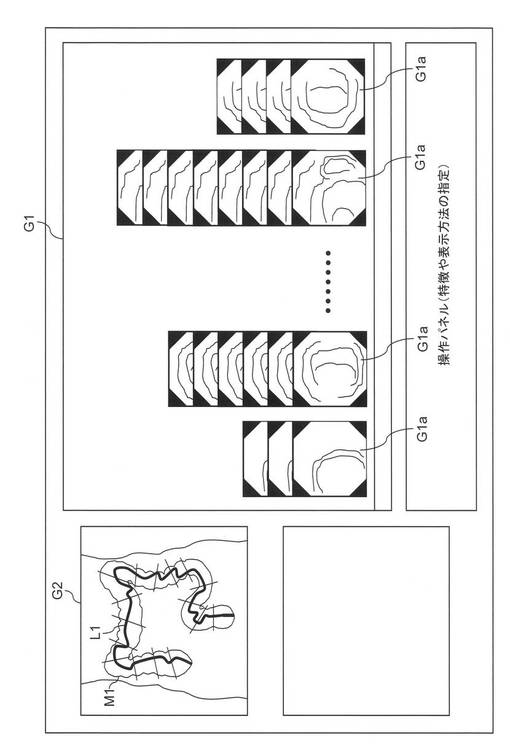
このステップS6では、領域分割部13により分割された領域Anごとに、その領域Anに分類された画像群を消化管の進行方向の位置順もしくは撮像された時間順に並び替え、さらに、その領域Anごとの画像群を各領域Anが並ぶ順番に並べて一覧画像を生成し、すなわち、消化管の延伸方向の位置を横軸に、各領域Anに分類された画像群を縦軸としてヒストグラム状に並べ、図6に示すように、第1のヒストグラム画像G1を生成する。
【0052】
ここで、図6には、第1のヒストグラム画像G1の一例が示されており、領域Anごとの画像G1aが縦方向に並び、さらに、その領域Anごとの画像群は横方向に各領域Anが並ぶ順番で並んでいる。なお、図6では、左から右に向かう方向が消化管の進行方向である。この図6の内視鏡検査画面には、第1のヒストグラム画像G1と一緒に、消化管モデルM1を示す消化管モデル画像G2が示されている。この消化管モデル画像G2には、カプセル内視鏡2の軌跡L1及び消化管の分割位置なども示されている。
【0053】
その後、ユーザは前述の内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図6中の操作パネルをマウスなどにより操作して、確認したい特徴を指定し、さらに、第1のヒストグラム画像G1から診断用に用いる画像の範囲(枚数)を選択して指定する。これらの指定値は、取得部4cにより読み込まれ、優先度決定部15や画像生成部16により用いられる。なお、前述の画像範囲の指定では、例えば、ユーザが操作部4fを入力操作し、第1のヒストグラム画像G1から直接表示の対象とする画像を選択したり、消化管モデル画像G2上に消化管モデルM1内の任意範囲を指定して表示の対象とする画像を選択したりすることが可能である。
【0054】
図2に戻り、ステップS6の処理後、対象とする特徴及び画像が指定されたか否かが判断され(ステップS7)、その判断は特徴及び画像が指定されるまで繰り返される(ステップS7のNO)。前述のユーザによる指定に応じて、対象とする特徴及び画像が指定されたと判断されると(ステップS7)、優先度決定部15では、指定された特徴に基づいて、指定された画像を対象に特徴抽出を行い、特徴量に従って領域ごとに画像の優先度を決定する(ステップS8)。
【0055】
このステップ8では、指定された画像から特徴を抽出し、その特徴量に応じて画像を表示する優先度を決定する。例えば、体腔内部の出血の指標として用いられる赤色具合(色調:赤)が特徴として指定された場合には、各領域Anの画像は、特徴量である赤色具合が高い程、画像の優先度が高く決定される。すなわち、その優先度は、赤色具合が最も高い画像を一番手前に、その一番手前の画像から奥に向かって順次赤色具合が低い画像を表示するように決定される。
【0056】
なお、疾患の種類により組織が黄色に変色するもの、あるいは、黒っぽくなるものがあるため、それらの特徴を確認したい場合には、色調の黄色又は黒を特徴として指定しても良い。また、形状の特徴として消化管の延伸方向に垂直な断面を示す画像上での管輪郭の凹凸(円形からの凹み具合など)を特徴として指定し、管狭窄の指標として凹み具合の多いものを優先度の高い画像としても良い。また、分割した領域An内でのカプセル内視鏡2の滞留時間を特徴として指定し、カプセル内視鏡2の通り難い領域もしくは管狭窄の指標としてユーザに提示しても良い。複数の特徴が指定された場合には、任意の計算方法で複数の特徴量を用いて優先度を決定し、画像の並び替えを行わずにバロメータ画像の表示でその度合いを提示しても良い。ただし、このバロメータ画像の表示は、時間軸に沿ってバロメータ画像を表示する既存方法とは異なり、消化管の延伸方向の位置を基準としたバロメータ画像の表示である。
【0057】
ステップS8の処理後、消化管の延伸方向の位置を基準に、領域ごとに優先度が高い順に画像を並べて示す第2のヒストグラム画像G3を生成し、表示部4eでは、その第2のヒストグラム画像G3を表示する(ステップS9)。
【0058】
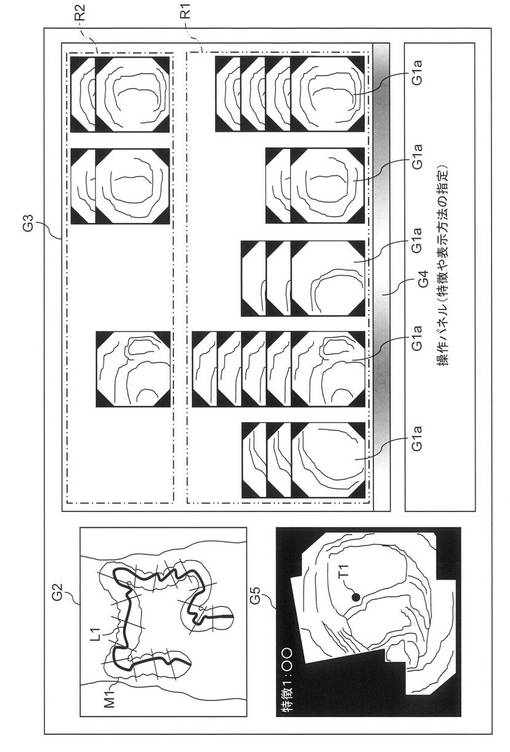
このステップS9では、領域分割部13により分割された領域Anごとに、その領域Anに分類された画像群を優先度決定部15により算出された優先度の高い順に並び替え、さらに、その領域Anごとの画像群を各領域Anが並ぶ順番に並べて一覧画像を生成し、すなわち、消化管の延伸方向の位置を横軸に、各領域Anに分類されて優先度順に並ぶ画像群を縦軸としてヒストグラム状に並べ、図7に示すように、優先度に基づく第2のヒストグラム画像G3を生成する。なお、特徴が複数指定された場合には、特徴ごとに画像群の個々の優先度を決定し、その後、領域An内の画像群を特徴ごとに分類して前述と同じように第2のヒストグラム画像G3を生成する。
【0059】
ここで、図7には、第2のヒストグラム画像G3の一例が示されており、この第2のヒストグラム画像G3では、異なる二つの特徴(特徴1及び特徴2)ごとに表示範囲が存在し、特徴1に関する表示範囲R1と、特徴2に関する表示範囲R2とが存在する。このような表示範囲は指定される特徴の数に応じて自動的に設定される。領域Anごとの画像G1aは、表示範囲R1において特徴1に基づく優先度順に縦方向に並び、表示範囲R2において特徴2に基づく優先度順に縦方向に並んでいる。さらに、その領域Anごとの画像群は横方向に各領域Anが並ぶ順番で並んでいる。なお、図7では、左から右に向かう方向が消化管の進行方向であり、また、特徴ごとに優先度が高い画像が一番手前に存在し、優先度が低くなるほど奥に画像が位置する。
【0060】
この図7の内視鏡検査画面には、前述の第2のヒストグラム画像G3と一緒に、消化管モデルM1を示す消化管モデル画像G2が示されており、さらに、消化管の延伸方向の優先度あるいは画像の枚数を色の濃度差で示すバロメータ画像G4が示されている。なお、消化管モデル画像G2は、仮想器官としての消化管モデルM1を示す仮想器官画像である。
【0061】
ここで、異なる二つの特徴(特徴1及び特徴2)が指定された場合には、特徴1及び特徴2のどちらか一方に関するバロメータ画像G4が表示されており、ユーザが操作部4fを入力操作すると、他方の特徴に関するバロメータ画像に切り替えられる。これは、二つのバロメータ画像を同時に表示するスペースが内視鏡検査画面に無い場合などに有効であり、特徴1及び特徴2のどちらのバロメータ画像も確認することが可能となる。もちろん、この切替表示ではなく、特徴1及び特徴2の両方のバロメータ画像を同時に表示するスペースが内視鏡検査画面にある場合には、特徴1及び特徴2の両方のバロメータ画像を予め表示するようにしても良い。
【0062】
その後、ユーザは前述の内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図7中の操作パネルをマウスなどにより操作して、確認したい領域An内の任意方向を指定する。この指定値は、取得部4cにより読み込まれて画像生成部16により用いられる。なお、領域An内の任意方向の指定では、例えば、ユーザが操作部4fを入力操作し、第2のヒストグラム画像G3から表示の対象とする領域An内の画像群を選択し、その領域An内の任意方向を選択する。
【0063】
図2に戻り、ステップS9の処理後、領域An内の任意方向が指定されたか否かが判断され(ステップS10)、その判断は領域An内の任意方向が指定されるまで繰り返される(ステップS10のNO)。前述のユーザによる指定に応じて、任意方向が指定されたと判断されると(ステップS10のYES)、画像生成部16では、指定された任意方向に応じ、領域An内の画像群を合成して合成画像G5を生成し、表示部4eでは、その合成画像G5を前述の第2のヒストグラム画像G3と共に表示し(ステップS11)、処理をステップS7に戻す。
【0064】
このステップS11では、ユーザにより領域An内の見たい方向が指定されると、その領域An内に存在する画像を用いて、見たい方向の画像を連結し、図7に示すように、合成画像G5を生成する。このとき、使用される画像はユーザが選択した画像としても良く、また、同じ領域Anの画像が複数枚選択されている場合には、指定された特徴の優先度が高い画像、もしくは、特徴量の高い画素を用いて、合成画像G5を作成しても良い。
【0065】
ここで、図7の内視鏡検査画面には、診断画像となる合成画像G5の一例が示されており、赤色の特徴T1が示されている。さらに、合成画像G5には、特徴1の特徴量が数値として示されている。この特徴量は優先度決定部15により求められている数値である。合成画像G5は奥行き感が有する画像であり、その画像の拡大なども可能である。なお、合成画像G5は前述の見たい方向が変更されると、それに応じて再生成される。このため、合成画像G5は、消化管の芯線を中心として任意の領域Anの内壁を360度示すパノラマ画像として機能するので、ユーザは自由に見たい方向を変更して読影を行うことが可能である。
【0066】
その後、ユーザが内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図7中の操作パネルをマウスなどにより操作して、確認したい特徴や診断用に用いる画像を変更すると、ステップS7以降の処理が行われ、新たなヒストグラム画像G3や合成画像G5が生成されて表示される。この再表示処理は確認したい特徴や診断用に用いる画像の変更に応じて繰り返されることになる。また、ユーザが操作部4fを入力操作して表示終了が指示されると、前述の画像表示処理は終了される。
【0067】
このように画像表示処理では、第2のヒストグラム画像G3が診断画像となる合成画像G5と共に表示部4eにより表示されてユーザに提示される。つまり、ユーザが確認したい特徴に基づいて画像の優先度が決定され、異常と思われる画像が優先的に表示される。さらに、確認したい特徴を顕著に示す合成画像G5も作成されて提示される。これにより、読影する画像枚数を少なくすることが可能であるうえ、確認したい特徴及びその値を一枚の合成画像G5上で確認することが可能になる。これにより、読影に要する読影時間及び読影者の労力的な負担が少ないカプセル内視鏡検査を行うことができる。
【0068】
以上説明したように、本実施形態によれば、領域Anごとにその領域An内の画像群の個々の優先度に応じて領域An内の画像群を並べ、さらに、領域Anごとの画像群を領域Anの並び順に並べて第2のヒストグラム画像G3を生成し、その第2のヒストグラム画像G3を診断画像となる合成画像G5と共に表示部4eにより表示する。これにより、診断画像内の特徴領域や特徴量を確認することが容易となることに加え、診断画像の生成に使われた画像や指定した特徴外の病理所見の漏れがないかを確認することが可能となるので、読影に要する読影時間及び読影者の労力的な負担を減らすことができる。
【0069】
また、画像ごとに画像における種類が異なる複数の特徴量を抽出し、領域An及び特徴量の種類ごとに画像の特徴量に応じて領域An内の画像群の各々の優先度を決定し、領域An及び特徴量の種類ごとに、領域An内の画像群の個々の画像の優先度に応じて領域An内の画像群を並べ、領域Anごとの画像群を領域Anが並ぶ順番に並べて第2のヒストグラム画像G3を生成することによって、異なる複数の特徴が指定された場合でも、特徴ごとに画像の優先度に応じて画像が並べられるので、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。
【0070】
また、複数の領域Anのうち同じ領域Anに分類された複数の画像を合成し、任意方向の合成画像G5を生成して表示することによって、指定された特徴を顕著に示す合成画像G5を作成して提示することが可能になるため、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。なお、より優先度が高い画像を用いて任意方向の合成画像G5を作成することが望ましい。
【0071】
また、画像ごとのカプセル内視鏡2の撮像位置に基づいて管状の器官の延伸方向に延びる器官の芯線を求め、求めた芯線を軸心とする管状の仮想器官を求め、求めた仮想器官をその延伸方向に沿って複数の領域Anに分割することによって、実際の器官経路に則した分割を行うことが可能になるので、より正確な領域分割を実現することができる。
【0072】
また、画像ごとにカプセル内視鏡2の撮像位置及び撮像姿勢を用いて撮像位置を基準とするカプセル内視鏡2の撮像領域F1を求め、求めた画像ごとのカプセル内視鏡2の撮像領域F1に応じて器官に対する画像の位置を決定し、各領域Anに対して複数の画像を分類することによって、各画像を正確に各領域Anに分類することが可能となり、より正確な読影を行うことができる。なお、この分類方法としては、カプセル内視鏡2の撮像領域F1を用いること以外にも、カプセル内視鏡2の撮像姿勢に基づいて撮像位置を基準とする撮像方向H1を求め、その撮像位置から撮像方向H1に延びる直線(撮像方向ベクトル)と、管状の器官の内壁との交点を用いるようにしても良い。ただし、管状の器官には多数の湾曲部分が存在しているため、前述の撮像領域F1を用いた方が分類精度は高くなる。
【0073】
なお、分割した領域An内でのカプセル内視鏡2の滞留時間を特徴として指定し、その滞留時間をカプセル内視鏡2の通り難い位置もしくは管狭窄の指標として、器官の延伸方向の位置を基準に各撮像位置での滞留時間を表示してユーザに提示した場合には、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。このときの画像表示処理では、処理部4dが領域Anごとにカプセル内視鏡2の滞留時間を算出する滞留時間算出部として機能し、画像生成部16は領域Anごとに器官の延伸方向に沿って滞留時間を示す滞留時間画像を生成し、表示部4eがその滞留時間画像を表示することになる。これにより、カプセル内視鏡2の各撮像位置での滞留時間が器官の延伸方向の位置を基準に表示される。
【0074】
また、前述の実施形態においては、消化管モデル画像G2に、消化管モデルM1に加えてカプセル内視鏡2の軌跡L1や分割位置を示しているが、これに限るものではなく、例えば、消化管モデルM1上で画像が存在する箇所あるいは存在しない箇所を色やグラデーション、パターンなどの表示により示すようにしても良い。この場合には、消化管モデルM1に対する撮像領域や非撮像領域を容易に把握することが可能となるので、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。また、ステップS7で指定した現在の画像範囲を色やグラデーション、パターンなどの表示により消化管モデルM1上に示すようにしても良い。この場合には、指定した現在の画像範囲が一目でわかるため、読影対象領域を容易に把握することが可能となり、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。
【0075】
以上、本発明の一実施形態を説明したが、この実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0076】
2 カプセル内視鏡
4 医用画像表示装置
4c 取得部
4d 処理部
4e 表示部
13 領域分割部
14 画像分類部
15 優先度決定部
16 画像生成部
An 領域
F1 撮像領域
G1a 画像
G2 消化管モデル画像
G3 ヒストグラム画像
G5 合成画像
M1 消化管モデル
【技術分野】
【0001】
本発明の実施形態は、医用画像表示装置に関し、例えば、カプセル内視鏡により撮像された医用画像を表示する医用画像表示装置に関する。
【背景技術】
【0002】
近年、管状の器官の一例である消化管を対象としたカプセル内視鏡が実用化されている。このカプセル内視鏡は、主に、体腔内の画像(医用画像)を撮像するCCDカメラなどの撮像部や体腔内部を明るくするLEDなどの照明部、撮影した画像情報を体外の受信装置に送るための送信部、これらの各部に電力を供給するボタン電池などの電源部を備えている。
【0003】
このようなカプセル内視境は、被験者に経口投与されてから各消化管の主に蠕動運動により肛門から自然に排出されるまで、約8時間から10時間の間に数枚/秒の体腔内画像を撮影する。例えば、1秒間に2枚の画像を8時間撮影したとすると、5万7千600枚もの画像が一回の検査で撮像されることになる。
【0004】
このように一回の検査で取得される画像枚数は大量であり、今後さらに増える傾向にある。このため、読影者の負担は今以上に大きくなることから、読影を支援する表示装置及びソフトの開発が行われている。例えば、読影の操作性及び効率の向上を目的に、時系列で撮像した内視鏡画像から、内視鏡の位置に基づいた診断画像を生成する方法、あるいは、内視鏡画像を領域分割して変形し、その変形画像を二次元や三次元のモデル上に貼り付けて診断画像を生成する方法が提案されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−240000号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、前述のように、時系列の内視鏡位置に基づいて診断画像を生成することや内視鏡画像を領域分割して変形し、診断画像を生成することは、診断に使用する画像枚数を減らす効果をもたらすが、一方で、読影者が診断画像内の特徴領域や特徴量を確認することを難しくする。また、診断画像の生成に使われた画像や指定した特徴以外の病理所見の漏れがないかを確認することが不可能となる。このため、読影に要する読影時間が長くなってしまい、さらに、読影者の労力的な負担も増加してしまう。
【0007】
本発明が解決しようとする課題は、読影に要する読影時間及び読影者の労力的な負担を減らすことができる医用画像表示装置を提供することである。
【課題を解決するための手段】
【0008】
実施形態に係る医用画像表示装置は、管状の器官内を移動して時系列で撮像する器官内撮像装置により撮像された複数の画像と、画像ごとの器官内撮像装置の撮像位置及び撮像姿勢を取得する取得部と、器官をその延伸方向に沿って複数の領域に分割する領域分割部と、画像ごとに器官内撮像装置の撮像位置及び撮像姿勢を用いて器官に対する画像の位置を決定し、複数の領域に対して複数の画像を分類する画像分類部と、画像ごとに画像の特徴量を抽出し、領域ごとに画像の特徴量に応じて領域内の各画像の優先度を決定する優先度決定部と、領域ごとに領域内の各画像の優先度に応じて領域内の複数の画像を並べた表示画像を生成する画像生成部と、表示画像を表示する表示部とを備える。
【図面の簡単な説明】
【0009】
【図1】実施形態に係るカプセル内視鏡検査システムの概略構成を示すブロック図である。
【図2】図1に示すカプセル内視鏡検査システムの医用画像表示装置が行う画像表示処理の流れを示すフローチャートである。
【図3】カプセル内視鏡の軌跡及び撮像方向の算出を説明するための説明図である。
【図4】消化管モデルの生成及びカプセル内視鏡の撮像領域の算出を説明するための説明図である。
【図5】消化管モデルの領域分割を説明するための説明図である。
【図6】第1のヒストグラム画像を含む内視鏡検査画面の一例を示す図である。
【図7】第2のヒストグラム画像を含む内視鏡検査画面の一例を示す図である。
【発明を実施するための形態】
【0010】
本発明の実施形態について図面を参照して説明する。
【0011】
図1に示すように、本実施形態に係るカプセル内視鏡検査システム1は、管状の器官内を撮像する器官内撮像装置の一例であるカプセル内視鏡2と、そのカプセル内視鏡2からのデータを受信する受信装置3と、その受信装置3のデータに基づいて器官内の医用画像を表示する医用画像表示装置4とを備えている。
【0012】
カプセル内視鏡2は、管状の器官(例えば、消化管)内を照らす照明部2aと、管状の器官内を撮像する撮像部2bと、カプセル内視鏡2の撮像位置を検出する位置検出部2cと、その撮像位置でのカプセル内視鏡2の撮像姿勢を検出する姿勢検出部2dと、撮像した画像や撮像位置、撮像姿勢などの情報を体外の受信装置3に送信する送信部2eと、それら各部に電力を供給する電源部2fと、各部を制御する制御部2gとを備えている。これらの各部はカプセル筺体内に封入されている。
【0013】
照明部2aは、撮像部2bによる撮像が可能に管状の器官内に光を照射する照明装置である。この照明部2aとしては、例えばLED(発光ダイオード)などが用いられる。なお、カプセル筺体は、内蔵する照明部2aにより器官の内壁に光照射を可能に、例えば先端部分を透明にして形成されている。
【0014】
撮像部2bは、一定の時間間隔(一定の周期)の時系列で撮像を行う撮像装置である。この撮像部2bとしては、例えばCCD(電荷結合素子)カメラなどが用いられる。なお、カプセル筺体は、前述の照明部2aの光照射に加え、内蔵する撮像部2bにより器官の内壁を撮像可能に、例えば、前述のように先端部分を透明にして形成されている。
【0015】
位置検出部2cは、撮像部2bの撮像と同期してカプセル内視鏡2の撮像位置を検出する検出装置である。この撮像位置は、カプセル内視鏡2の空間的な位置であり、X軸、Y軸及びZ軸により決定される。この空間的な位置検出に関しては、例えば、電磁波の強弱を用いた位置検出手段、あるいは、カプセル内視鏡2に内蔵された小型のGPS(全地球測位システム)を用いた位置検出手段など、様々な位置検出手段を用いることが可能である。
【0016】
姿勢検出部2dは、撮像部2bの撮像と同期して前述の撮像位置と共に、その撮像位置でのカプセル内視鏡2の撮像姿勢を検出する検出装置である。この姿勢検出部2dとしては、例えば、加速度センサやジャイロセンサなどを用いた姿勢検出部など、様々な姿勢検出部を用いることが可能である。
【0017】
送信部2eは、撮像部2bにより撮像された画像と、位置検出部2cにより検出されたカプセル内視鏡2の撮像位置及び姿勢検出部2dにより検出されたカプセル内視鏡2の撮像姿勢とを含む情報を無線で受信装置3に送信する送信装置である。この送信部2eとしては、例えば送信アンテナなどが用いられる。
【0018】
電源部2fは、各部に電力を供給する電力供給装置である。この電源部2fとしては、例えばボタン型の電池などが用いられる。なお、電池は、8時間から10時間程度の検査時間に対応するため、必要とする容量に応じて複数個設けられる。
【0019】
制御部2gは、照明部2aにより器官内を照射しながら撮像部2bにより一定の時間間隔(一定の周期)で器官の内壁を撮像する制御を行う。さらに、制御部2gは、撮像部2bにより撮像した画像、位置検出部2cにより検出した撮像位置、さらに、姿勢検出部2dにより検出した撮像姿勢を含む情報を順次、送信部2eにより受信装置3に送信する制御を行う。
【0020】
このカプセル内視鏡2が患者によって飲み込まれると、カプセル内視鏡2は管状の器官内を蠕動運動により進みながら、一定の時間間隔(一定の周期)で撮像を行う。この撮像では、電源部2fからの電力により照射光が照明部2aから器官の内壁に照射され、その内壁により反射された反射光は撮像部2bにより光電変換され、画像データが生成される。このとき、位置検出部2cでは、画像データの生成と同期してカプセル内視鏡2の撮像位置が検出され、同様に、姿勢検出部2dでも、画像データの生成と同期してカプセル内視鏡2の撮像姿勢が検出される。これらの画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢が送信部2eにより無線通信で患者の体外にある受信装置3に送信される。画像データの生成、位置検出部2cによる撮像位置の検出、姿勢検出部2dによる撮像姿勢の検出及びデータの送信は、制御部2gによる制御の下、一定の時間間隔(例えば、数フレーム/秒)で行われる。
【0021】
受信装置3は、カプセル内視鏡2から送信された情報を無線で受信する受信アンテナなどの受信部3aと、その受信した情報を記憶するフラッシュメモリなどの記憶媒体3bとを備えている。この受信装置3では、前述のカプセル内視鏡2から送信された情報、すなわち画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢を含む情報が受信され、順次、記憶媒体3bに格納される。なお、記憶媒体3bは着脱可能であり、この記憶媒体3bが医用画像表示装置4に装着され、記憶媒体3b内の全情報が医用画像表示装置4に入力されることになる。
【0022】
医用画像表示装置4は、各部を集中的に制御する制御部4aと、各種プログラムや各種データなどを記憶する記憶部4bと、その記憶部4bから各種データを取得する取得部4cと、各種処理を行う処理部4dと、各種画像を表示する表示部4eと、医師などのユーザ(利用者)からの入力操作を受け付ける操作部4fとを備えている。この医用画像表示装置4はワークステーションとして機能する。
【0023】
制御部4aは、記憶部4bに記憶された各種プログラムや各種データなどに基づいて各部を制御する。さらに、制御部4aは、記憶部4bに記憶された各種プログラムや各種データに基づいて一連のデータ処理などを実行する。
【0024】
記憶部4bは、制御部4aのワークエリアとして機能するメモリに加え、各種プログラム及び各種データを記憶するメモリなどを有している。これらのメモリとしては、例えばROMやRAM、磁気ディスク装置(HDD)、フラッシュメモリ(半導体ディスク装置)などが用いられる。この記憶部4bには、受信装置3の記憶媒体3b内の全情報、すなわち全画像分の画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢を含む情報が記憶される。
【0025】
取得部4cは、記憶部4bから画像ごとに、画像データ、カプセル内視鏡2の撮像位置及び撮像姿勢などの情報を取得し、処理部4dに送信する。なお、情報の取得は、例えば、医師などのユーザが操作部4fを入力操作して、処理部4dによる処理の実行を指示することに応じて行われる。
【0026】
処理部4dは、カプセル内視鏡2の軌跡及び撮像方向を算出する撮像軌跡算出部11と、管状の器官に対する画像の位置を算出する画像位置算出部12と、器官を延伸方向に沿って複数の領域に分割する領域分割部13と、分割した各領域に対して複数の画像(内視鏡画像)を分類する画像分類部14と、領域ごとに画像の優先度を決定する優先度決定部15と、ヒストグラム画像や合成画像(診断画像)などの各種画像を生成する画像生成部16とを備えている。
【0027】
撮像軌跡算出部11は、取得部4cから画像ごとのカプセル内視鏡2の撮像位置及び撮像姿勢に関する情報を受信し、それらの情報に応じてカプセル内視鏡2の軌跡及び撮像方向を算出し、画像位置算出部12に出力する。なお、撮像位置及び撮像姿勢に関する情報は、撮像された画像枚数に相当する時系列の位置データである。
【0028】
画像位置算出部12は、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡及び撮像方向に基づいて管状の器官(例えば、消化管など)に対する画像の位置を算出する。例えば、画像位置算出部12は、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡に基づいて、その軌跡を芯線として任意の管径を持つ仮想器官である器官モデル(例えば、消化管モデルなど)を作成し、カプセル内視鏡2の撮像位置及び撮像方向から器官の内壁上の撮像領域を求め、その撮像領域の位置からその器官モデルに対する画像の位置を特定する。
【0029】
領域分割部13は、画像位置算出部12により作成された器官モデルをその延伸方向、すなわちカプセル内視鏡2の軌跡に沿って任意の距離(例えば、所定間隔あるいは所望の間隔)で複数の領域に分割する。この領域分割では、撮像軌跡算出部11により算出されたカプセル内視鏡2の軌跡を用いて、器官モデルの延伸方向の位置を基準に器官モデルを分割する。
【0030】
画像分類部14は、画像位置算出部12により得られた器官モデルに対する画像の位置情報を用いて、領域分割部13により分割された領域ごとに、その領域内に存在(該当)する画像を抽出し、その領域に属する画像群として分類する。なお、画像はその領域に一枚だけ存在する場合や存在しない場合もある。
【0031】
優先度決定部15は、ユーザによって指定された特徴に基づき、画像に対して特徴抽出を行い、その特徴量に応じて前述の領域ごとに画像群の個々(領域内の各画像)の優先度(例えば、画像を表示する優先度)、すなわち優先順位を決定する。例えば、体腔内部の出血の指標として用いられる赤色具合(色調:赤)が特徴として指定されると、各領域の画像は、特徴量である赤色具合が多い程、画像の優先度が高く設定される。なお、特徴量としては、色の具合(程度)以外にも、その色の具合(濃度)に加え、その色部分(色領域)の面積などを用いることも可能であり、さらに、それらの値をかけ合わせた数値(濃度×色領域)を用いることも可能である。
【0032】
画像生成部16は、領域分割部13により分割された領域単位で、その領域に分類された複数の画像である画像群を、器官の進行方向の位置順もしくは撮像された時間順に並び替え、さらに、その領域ごとの画像群を各領域が並ぶ順番に並べ一覧画像を生成し、すなわち、器官の延伸方向の位置を横軸に、各領域に分類された画像群(もしくは枚数)を縦軸としてヒストグラム状に並べ、第1のヒストグラム画像を生成する。また、画像生成部16は、前述の並び替えを優先度の高い順にかえて前述同様に処理を行って一覧画像、すなわち、優先度に基づく第2のヒストグラム画像(表示画像)も生成する。さらに、画像生成部16は、ユーザによって指定された領域内の画像群を用いて、その領域内の任意方向の画像を合成し、診断画像となる合成画像を生成する。
【0033】
なお、前述の処理部4dは、電気回路などのハードウエアで構成されても良く、あるいは、これらの機能を実行するプログラムなどのソフトウエアで構成されても良く、また、それらの両方の組合せにより構成されても良い。
【0034】
表示部4eは、処理部4dから送信されたヒストグラム画像や合成画像、その他画像など、各種画像をカラー表示する表示装置である。この表示部4eとしては、例えば液晶ディスプレイやCRT(Cathode Ray Tube)ディスプレイなどが用いられる。
【0035】
操作部4fは、医師などのユーザにより入力操作され、画像表示や画像の切り替え、設定変更などの各種の入力操作を受け付ける入力部である。この操作部4fとしては、例えばマウスやキーボードなどの入力デバイスが用いられる。
【0036】
次に、前述の医用画像表示装置4が行う画像表示処理について詳しく説明する。医師などのユーザが操作部4fを入力操作して画像表示処理の実行を指示すると、以下の処理が実行される。なお、ここでは、管状の器官の一例として消化管(例えば、腸管)に対する処理について説明する。
【0037】
図2に示すように、まず、取得部4cでは、記憶部4bからカプセル内視鏡2により撮像された撮像画像、そのカプセル内視鏡2の撮像位置及び撮像姿勢を読み込む(ステップS1)。
【0038】
このステップS1では、カプセル内視鏡2により撮像された全画像が記憶部4bから読み込まれ、さらに、カプセル内視鏡2の撮像位置及び撮像姿勢も記憶部4bから全画像分読み込まれる。
【0039】
ステップS1の処理後、処理部4dの撮像軌跡算出部11では、取得部4cにより読み込まれたカプセル内視鏡2の撮像位置及び撮像姿勢を用いて、カプセル内視鏡2の軌跡及び撮像方向を算出する(ステップS2)。
【0040】
このステップS2では、図3に示すように、まず、取得部4cにより読み込まれたカプセル内視鏡2の撮像位置を時系列にたどり、カプセル内視鏡2の軌跡L1を算出し、さらに、取得部4cにより読み込まれたカプセル内視鏡2の撮像姿勢を用いて、そのカプセル内視鏡2の軌跡L1に沿った各撮像位置でカプセル内視鏡2が向いていた方向を撮像方向D1として算出する。
【0041】
図2に戻り、ステップS2の処理後、処理部4dの画像位置算出部12では、撮像軌跡算出部11から入力されたカプセル内視鏡2の軌跡L1及び撮像方向D1を用いて、消化管に対する画像の位置を算出する(ステップS3)。
【0042】
このステップS3では、図4に示すように、まず、撮像軌跡算出部11で算出されたカプセル内視鏡2の軌跡L1を芯線(中心線)とし、任意の管径を持つ消化管モデルM1を作成する。次に、カプセル内視鏡2の撮像位置(画像を撮像したときの位置)とその撮像位置での撮像方向D1から消化管モデルM1の内壁上の撮像領域F1を求め、その撮像領域F1の位置に応じて、撮像された画像が消化管モデルM1上のどこに位置しているか推定し、消化管モデルM1と画像との位置を対応付けすることで、消化管に対する画像の位置を特定する。
【0043】
前述の消化管モデルM1の生成では、消化管モデルM1の管径を算出するため、例えば消化管の太さ(年齢や体格に応じた平均的な太さ、あるいは、他の検査から得られた患者固有の太さ)などの情報が用いられる。この情報は予め記憶部4bに記憶されている。また、撮像領域F1の算出では、前述の消化管の太さなどの情報に加え、カプセル内視鏡2の視野角の情報も用いられる。この視野角の情報は前述の消化管の太さなどの情報と共に予め記憶部4bに記憶されている。例えば、撮像領域F1を算出する際には、前述の消化管の太さなどの情報を用いて撮像位置から消化管の内壁までの撮像方向D1に沿った距離(被写体距離)を算出し、その被写体距離と前述の視野角に基づいて、撮像視野、すなわち撮像領域F1を求める。
【0044】
ここで、前述の消化管モデルM1の作成において、カプセル内視鏡2が同じ位置で方向を変えて滞留し、軌跡L1が同じ場所で上下左右に移動する場合には、平均位置もしくは中心位置を芯線上の点として算出し直して用いても良い。また、消化管モデルM1の管径を算出する場合には、前述の消化管の太さ情報ではなく、同じ場所でカプセル内視鏡2が移動する場合の移動可能な上下及び左右の範囲で推測しても良い。また、撮像画像の位置算出においては、周辺の画像と画像内の形状などの特徴を用いて位置の補正を行っても良い。
【0045】
図2に戻り、ステップS3の処理後、処理部4dの領域分割部13では、画像位置算出部12により作成された消化管モデルM1を延伸方向に沿って任意の距離で領域分割する(ステップS4)。
【0046】
このステップS4では、図5に示すように、作成された消化管モデルM1をその延伸方向、すなわちカプセル内視鏡2の軌跡L1に沿って任意の距離、例えば、所定の等間隔で領域分割する。これにより、消化管モデルM1は複数の領域An(nは自然数である)に分割されることになる。なお、この領域分割は、ユーザにより分割位置(例えば、分割間隔など)が変更されると、再度行われる。
【0047】
図2に戻り、ステップS4の処理後、処理部4dの画像分類部14では、領域分割部13により分割された各領域Anに対し、取得部4cにより読み込まれた画像を分類する(ステップS5)。
【0048】
このステップS5では、画像位置算出部12により得られた消化管モデルM1に対する画像の位置情報を基に、分割された領域Anごとに、その領域An内に存在する画像を抽出し、その領域Anに属する画像群として分類する。ただし、画像はその領域に一枚だけ存在する場合や存在しない場合もある。なお、この画像分類は、前述の領域分割が再度行われると、それに応じて再度行われる。
【0049】
ここで、前述の画像分類において、ある画像の撮像領域F1が複数の領域Anに属する場合(例えば、二つの領域Anにまたがる場合)には、両方にもしくは領域Anを占める割合が大きい方に分類されるなどの処理が行われる。なお、この分類の際の境界条件はユーザにより任意に指定されるようにしても良い。
【0050】
ステップS5の処理後、処理部4dの画像生成部16では、消化管の延伸方向の位置を基準に、領域Anごとに画像G1aを並べて示す第1のヒストグラム画像G1を生成し、表示部4eでは、その第1のヒストグラム画像G1を表示する(ステップS6)。
【0051】
このステップS6では、領域分割部13により分割された領域Anごとに、その領域Anに分類された画像群を消化管の進行方向の位置順もしくは撮像された時間順に並び替え、さらに、その領域Anごとの画像群を各領域Anが並ぶ順番に並べて一覧画像を生成し、すなわち、消化管の延伸方向の位置を横軸に、各領域Anに分類された画像群を縦軸としてヒストグラム状に並べ、図6に示すように、第1のヒストグラム画像G1を生成する。
【0052】
ここで、図6には、第1のヒストグラム画像G1の一例が示されており、領域Anごとの画像G1aが縦方向に並び、さらに、その領域Anごとの画像群は横方向に各領域Anが並ぶ順番で並んでいる。なお、図6では、左から右に向かう方向が消化管の進行方向である。この図6の内視鏡検査画面には、第1のヒストグラム画像G1と一緒に、消化管モデルM1を示す消化管モデル画像G2が示されている。この消化管モデル画像G2には、カプセル内視鏡2の軌跡L1及び消化管の分割位置なども示されている。
【0053】
その後、ユーザは前述の内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図6中の操作パネルをマウスなどにより操作して、確認したい特徴を指定し、さらに、第1のヒストグラム画像G1から診断用に用いる画像の範囲(枚数)を選択して指定する。これらの指定値は、取得部4cにより読み込まれ、優先度決定部15や画像生成部16により用いられる。なお、前述の画像範囲の指定では、例えば、ユーザが操作部4fを入力操作し、第1のヒストグラム画像G1から直接表示の対象とする画像を選択したり、消化管モデル画像G2上に消化管モデルM1内の任意範囲を指定して表示の対象とする画像を選択したりすることが可能である。
【0054】
図2に戻り、ステップS6の処理後、対象とする特徴及び画像が指定されたか否かが判断され(ステップS7)、その判断は特徴及び画像が指定されるまで繰り返される(ステップS7のNO)。前述のユーザによる指定に応じて、対象とする特徴及び画像が指定されたと判断されると(ステップS7)、優先度決定部15では、指定された特徴に基づいて、指定された画像を対象に特徴抽出を行い、特徴量に従って領域ごとに画像の優先度を決定する(ステップS8)。
【0055】
このステップ8では、指定された画像から特徴を抽出し、その特徴量に応じて画像を表示する優先度を決定する。例えば、体腔内部の出血の指標として用いられる赤色具合(色調:赤)が特徴として指定された場合には、各領域Anの画像は、特徴量である赤色具合が高い程、画像の優先度が高く決定される。すなわち、その優先度は、赤色具合が最も高い画像を一番手前に、その一番手前の画像から奥に向かって順次赤色具合が低い画像を表示するように決定される。
【0056】
なお、疾患の種類により組織が黄色に変色するもの、あるいは、黒っぽくなるものがあるため、それらの特徴を確認したい場合には、色調の黄色又は黒を特徴として指定しても良い。また、形状の特徴として消化管の延伸方向に垂直な断面を示す画像上での管輪郭の凹凸(円形からの凹み具合など)を特徴として指定し、管狭窄の指標として凹み具合の多いものを優先度の高い画像としても良い。また、分割した領域An内でのカプセル内視鏡2の滞留時間を特徴として指定し、カプセル内視鏡2の通り難い領域もしくは管狭窄の指標としてユーザに提示しても良い。複数の特徴が指定された場合には、任意の計算方法で複数の特徴量を用いて優先度を決定し、画像の並び替えを行わずにバロメータ画像の表示でその度合いを提示しても良い。ただし、このバロメータ画像の表示は、時間軸に沿ってバロメータ画像を表示する既存方法とは異なり、消化管の延伸方向の位置を基準としたバロメータ画像の表示である。
【0057】
ステップS8の処理後、消化管の延伸方向の位置を基準に、領域ごとに優先度が高い順に画像を並べて示す第2のヒストグラム画像G3を生成し、表示部4eでは、その第2のヒストグラム画像G3を表示する(ステップS9)。
【0058】
このステップS9では、領域分割部13により分割された領域Anごとに、その領域Anに分類された画像群を優先度決定部15により算出された優先度の高い順に並び替え、さらに、その領域Anごとの画像群を各領域Anが並ぶ順番に並べて一覧画像を生成し、すなわち、消化管の延伸方向の位置を横軸に、各領域Anに分類されて優先度順に並ぶ画像群を縦軸としてヒストグラム状に並べ、図7に示すように、優先度に基づく第2のヒストグラム画像G3を生成する。なお、特徴が複数指定された場合には、特徴ごとに画像群の個々の優先度を決定し、その後、領域An内の画像群を特徴ごとに分類して前述と同じように第2のヒストグラム画像G3を生成する。
【0059】
ここで、図7には、第2のヒストグラム画像G3の一例が示されており、この第2のヒストグラム画像G3では、異なる二つの特徴(特徴1及び特徴2)ごとに表示範囲が存在し、特徴1に関する表示範囲R1と、特徴2に関する表示範囲R2とが存在する。このような表示範囲は指定される特徴の数に応じて自動的に設定される。領域Anごとの画像G1aは、表示範囲R1において特徴1に基づく優先度順に縦方向に並び、表示範囲R2において特徴2に基づく優先度順に縦方向に並んでいる。さらに、その領域Anごとの画像群は横方向に各領域Anが並ぶ順番で並んでいる。なお、図7では、左から右に向かう方向が消化管の進行方向であり、また、特徴ごとに優先度が高い画像が一番手前に存在し、優先度が低くなるほど奥に画像が位置する。
【0060】
この図7の内視鏡検査画面には、前述の第2のヒストグラム画像G3と一緒に、消化管モデルM1を示す消化管モデル画像G2が示されており、さらに、消化管の延伸方向の優先度あるいは画像の枚数を色の濃度差で示すバロメータ画像G4が示されている。なお、消化管モデル画像G2は、仮想器官としての消化管モデルM1を示す仮想器官画像である。
【0061】
ここで、異なる二つの特徴(特徴1及び特徴2)が指定された場合には、特徴1及び特徴2のどちらか一方に関するバロメータ画像G4が表示されており、ユーザが操作部4fを入力操作すると、他方の特徴に関するバロメータ画像に切り替えられる。これは、二つのバロメータ画像を同時に表示するスペースが内視鏡検査画面に無い場合などに有効であり、特徴1及び特徴2のどちらのバロメータ画像も確認することが可能となる。もちろん、この切替表示ではなく、特徴1及び特徴2の両方のバロメータ画像を同時に表示するスペースが内視鏡検査画面にある場合には、特徴1及び特徴2の両方のバロメータ画像を予め表示するようにしても良い。
【0062】
その後、ユーザは前述の内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図7中の操作パネルをマウスなどにより操作して、確認したい領域An内の任意方向を指定する。この指定値は、取得部4cにより読み込まれて画像生成部16により用いられる。なお、領域An内の任意方向の指定では、例えば、ユーザが操作部4fを入力操作し、第2のヒストグラム画像G3から表示の対象とする領域An内の画像群を選択し、その領域An内の任意方向を選択する。
【0063】
図2に戻り、ステップS9の処理後、領域An内の任意方向が指定されたか否かが判断され(ステップS10)、その判断は領域An内の任意方向が指定されるまで繰り返される(ステップS10のNO)。前述のユーザによる指定に応じて、任意方向が指定されたと判断されると(ステップS10のYES)、画像生成部16では、指定された任意方向に応じ、領域An内の画像群を合成して合成画像G5を生成し、表示部4eでは、その合成画像G5を前述の第2のヒストグラム画像G3と共に表示し(ステップS11)、処理をステップS7に戻す。
【0064】
このステップS11では、ユーザにより領域An内の見たい方向が指定されると、その領域An内に存在する画像を用いて、見たい方向の画像を連結し、図7に示すように、合成画像G5を生成する。このとき、使用される画像はユーザが選択した画像としても良く、また、同じ領域Anの画像が複数枚選択されている場合には、指定された特徴の優先度が高い画像、もしくは、特徴量の高い画素を用いて、合成画像G5を作成しても良い。
【0065】
ここで、図7の内視鏡検査画面には、診断画像となる合成画像G5の一例が示されており、赤色の特徴T1が示されている。さらに、合成画像G5には、特徴1の特徴量が数値として示されている。この特徴量は優先度決定部15により求められている数値である。合成画像G5は奥行き感が有する画像であり、その画像の拡大なども可能である。なお、合成画像G5は前述の見たい方向が変更されると、それに応じて再生成される。このため、合成画像G5は、消化管の芯線を中心として任意の領域Anの内壁を360度示すパノラマ画像として機能するので、ユーザは自由に見たい方向を変更して読影を行うことが可能である。
【0066】
その後、ユーザが内視鏡検査画面を見ながら操作部4fを入力操作し、例えば、図7中の操作パネルをマウスなどにより操作して、確認したい特徴や診断用に用いる画像を変更すると、ステップS7以降の処理が行われ、新たなヒストグラム画像G3や合成画像G5が生成されて表示される。この再表示処理は確認したい特徴や診断用に用いる画像の変更に応じて繰り返されることになる。また、ユーザが操作部4fを入力操作して表示終了が指示されると、前述の画像表示処理は終了される。
【0067】
このように画像表示処理では、第2のヒストグラム画像G3が診断画像となる合成画像G5と共に表示部4eにより表示されてユーザに提示される。つまり、ユーザが確認したい特徴に基づいて画像の優先度が決定され、異常と思われる画像が優先的に表示される。さらに、確認したい特徴を顕著に示す合成画像G5も作成されて提示される。これにより、読影する画像枚数を少なくすることが可能であるうえ、確認したい特徴及びその値を一枚の合成画像G5上で確認することが可能になる。これにより、読影に要する読影時間及び読影者の労力的な負担が少ないカプセル内視鏡検査を行うことができる。
【0068】
以上説明したように、本実施形態によれば、領域Anごとにその領域An内の画像群の個々の優先度に応じて領域An内の画像群を並べ、さらに、領域Anごとの画像群を領域Anの並び順に並べて第2のヒストグラム画像G3を生成し、その第2のヒストグラム画像G3を診断画像となる合成画像G5と共に表示部4eにより表示する。これにより、診断画像内の特徴領域や特徴量を確認することが容易となることに加え、診断画像の生成に使われた画像や指定した特徴外の病理所見の漏れがないかを確認することが可能となるので、読影に要する読影時間及び読影者の労力的な負担を減らすことができる。
【0069】
また、画像ごとに画像における種類が異なる複数の特徴量を抽出し、領域An及び特徴量の種類ごとに画像の特徴量に応じて領域An内の画像群の各々の優先度を決定し、領域An及び特徴量の種類ごとに、領域An内の画像群の個々の画像の優先度に応じて領域An内の画像群を並べ、領域Anごとの画像群を領域Anが並ぶ順番に並べて第2のヒストグラム画像G3を生成することによって、異なる複数の特徴が指定された場合でも、特徴ごとに画像の優先度に応じて画像が並べられるので、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。
【0070】
また、複数の領域Anのうち同じ領域Anに分類された複数の画像を合成し、任意方向の合成画像G5を生成して表示することによって、指定された特徴を顕著に示す合成画像G5を作成して提示することが可能になるため、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。なお、より優先度が高い画像を用いて任意方向の合成画像G5を作成することが望ましい。
【0071】
また、画像ごとのカプセル内視鏡2の撮像位置に基づいて管状の器官の延伸方向に延びる器官の芯線を求め、求めた芯線を軸心とする管状の仮想器官を求め、求めた仮想器官をその延伸方向に沿って複数の領域Anに分割することによって、実際の器官経路に則した分割を行うことが可能になるので、より正確な領域分割を実現することができる。
【0072】
また、画像ごとにカプセル内視鏡2の撮像位置及び撮像姿勢を用いて撮像位置を基準とするカプセル内視鏡2の撮像領域F1を求め、求めた画像ごとのカプセル内視鏡2の撮像領域F1に応じて器官に対する画像の位置を決定し、各領域Anに対して複数の画像を分類することによって、各画像を正確に各領域Anに分類することが可能となり、より正確な読影を行うことができる。なお、この分類方法としては、カプセル内視鏡2の撮像領域F1を用いること以外にも、カプセル内視鏡2の撮像姿勢に基づいて撮像位置を基準とする撮像方向H1を求め、その撮像位置から撮像方向H1に延びる直線(撮像方向ベクトル)と、管状の器官の内壁との交点を用いるようにしても良い。ただし、管状の器官には多数の湾曲部分が存在しているため、前述の撮像領域F1を用いた方が分類精度は高くなる。
【0073】
なお、分割した領域An内でのカプセル内視鏡2の滞留時間を特徴として指定し、その滞留時間をカプセル内視鏡2の通り難い位置もしくは管狭窄の指標として、器官の延伸方向の位置を基準に各撮像位置での滞留時間を表示してユーザに提示した場合には、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。このときの画像表示処理では、処理部4dが領域Anごとにカプセル内視鏡2の滞留時間を算出する滞留時間算出部として機能し、画像生成部16は領域Anごとに器官の延伸方向に沿って滞留時間を示す滞留時間画像を生成し、表示部4eがその滞留時間画像を表示することになる。これにより、カプセル内視鏡2の各撮像位置での滞留時間が器官の延伸方向の位置を基準に表示される。
【0074】
また、前述の実施形態においては、消化管モデル画像G2に、消化管モデルM1に加えてカプセル内視鏡2の軌跡L1や分割位置を示しているが、これに限るものではなく、例えば、消化管モデルM1上で画像が存在する箇所あるいは存在しない箇所を色やグラデーション、パターンなどの表示により示すようにしても良い。この場合には、消化管モデルM1に対する撮像領域や非撮像領域を容易に把握することが可能となるので、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。また、ステップS7で指定した現在の画像範囲を色やグラデーション、パターンなどの表示により消化管モデルM1上に示すようにしても良い。この場合には、指定した現在の画像範囲が一目でわかるため、読影対象領域を容易に把握することが可能となり、読影効率を向上させることができ、その結果、読影時間及び読影者の労力的な負担を減らすことができる。
【0075】
以上、本発明の一実施形態を説明したが、この実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0076】
2 カプセル内視鏡
4 医用画像表示装置
4c 取得部
4d 処理部
4e 表示部
13 領域分割部
14 画像分類部
15 優先度決定部
16 画像生成部
An 領域
F1 撮像領域
G1a 画像
G2 消化管モデル画像
G3 ヒストグラム画像
G5 合成画像
M1 消化管モデル
【特許請求の範囲】
【請求項1】
管状の器官内を移動して時系列で撮像する器官内撮像装置により撮像された複数の画像と、前記画像ごとの前記器官内撮像装置の撮像位置及び撮像姿勢を取得する取得部と、
前記器官をその延伸方向に沿って複数の領域に分割する領域分割部と、
前記画像ごとに前記器官内撮像装置の撮像位置及び撮像姿勢を用いて前記器官に対する前記画像の位置を決定し、前記複数の領域に対して前記複数の画像を分類する画像分類部と、
前記画像ごとに前記画像の特徴量を抽出し、前記領域ごとに前記画像の特徴量に応じて前記領域内の各画像の優先度を決定する優先度決定部と、
前記領域ごとに前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べた表示画像を生成する画像生成部と、
前記表示画像を表示する表示部と、
を備えることを特徴とする医用画像表示装置。
【請求項2】
前記画像生成部は、前記表示画像として、前記領域ごとに前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べ、前記領域ごとの画像群を前記領域が並ぶ順番に並べた表示画像を生成することを特徴とする請求項1記載の医用画像表示装置。
【請求項3】
前記優先度決定部は、前記画像ごとに前記画像における種類が異なる複数の特徴量を抽出し、前記領域及び前記特徴量の種類ごとに前記画像の特徴量に応じて前記領域内の各画像の優先度を決定し、
前記画像生成部は、前記表示画像として、前記領域及び前記特徴量の種類ごとに、前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べ、前記領域ごとの画像群を前記領域が並ぶ順番に並べた表示画像を生成することを特徴とする請求項1又は2記載の医用画像表示装置。
【請求項4】
前記画像生成部は、前記複数の領域のうち同じ領域に分類された複数の画像を合成して任意方向の合成画像を生成し、
前記表示部は、前記合成画像を表示することを特徴とする請求項1ないし3のいずれか一に記載の医用画像表示装置。
【請求項5】
前記領域ごとに前記器官内撮像装置の滞留時間を算出する滞留時間算出部を備え、
前記画像生成部は、前記領域ごとに前記器官の延伸方向に沿って前記滞留時間を示す滞留時間画像を生成し、
前記表示部は、前記滞留時間画像を表示することを特徴とする請求項1ないし4のいずれか一に記載の医用画像表示装置。
【請求項6】
前記領域分割部は、前記画像ごとの前記器官内撮像装置の撮像位置に基づいて前記器官の延伸方向に延びる前記器官の芯線を求め、求めた前記芯線を軸心とする管状の仮想器官を求め、求めた前記仮想器官をその延伸方向に沿って前記複数の領域に分割することを特徴とする請求項1ないし5のいずれか一に記載の医用画像表示装置。
【請求項7】
前記画像分類部は、前記画像ごとに前記器官内撮像装置の撮像位置及び撮像姿勢を用いてその撮像位置を基準とする前記器官内撮像装置の撮像領域を求め、求めた前記画像ごとの前記器官内撮像装置の撮像領域に応じて前記器官に対する前記画像の位置を決定し、前記複数の領域に対して前記複数の画像を分類することを特徴とする請求項1ないし6のいずれか一に記載の医用画像表示装置。
【請求項8】
前記画像生成部は、前記仮想器官及び前記器官の芯線、前記仮想器官の分割位置を示す仮想器官画像を生成し、
前記表示部は、前記仮想器官画像を表示することを特徴とする請求項6記載の医用画像表示装置。
【請求項9】
前記画像生成部は、前記仮想器官画像として、前記仮想器官及び前記器官の芯線、前記仮想器官の分割位置に加え、前記仮想器官上で前記画像が存在する又は存在しない箇所を示す仮想器官画像を生成することを特徴とする請求項8記載の医用画像表示装置。
【請求項1】
管状の器官内を移動して時系列で撮像する器官内撮像装置により撮像された複数の画像と、前記画像ごとの前記器官内撮像装置の撮像位置及び撮像姿勢を取得する取得部と、
前記器官をその延伸方向に沿って複数の領域に分割する領域分割部と、
前記画像ごとに前記器官内撮像装置の撮像位置及び撮像姿勢を用いて前記器官に対する前記画像の位置を決定し、前記複数の領域に対して前記複数の画像を分類する画像分類部と、
前記画像ごとに前記画像の特徴量を抽出し、前記領域ごとに前記画像の特徴量に応じて前記領域内の各画像の優先度を決定する優先度決定部と、
前記領域ごとに前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べた表示画像を生成する画像生成部と、
前記表示画像を表示する表示部と、
を備えることを特徴とする医用画像表示装置。
【請求項2】
前記画像生成部は、前記表示画像として、前記領域ごとに前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べ、前記領域ごとの画像群を前記領域が並ぶ順番に並べた表示画像を生成することを特徴とする請求項1記載の医用画像表示装置。
【請求項3】
前記優先度決定部は、前記画像ごとに前記画像における種類が異なる複数の特徴量を抽出し、前記領域及び前記特徴量の種類ごとに前記画像の特徴量に応じて前記領域内の各画像の優先度を決定し、
前記画像生成部は、前記表示画像として、前記領域及び前記特徴量の種類ごとに、前記領域内の各画像の優先度に応じて前記領域内の複数の画像を並べ、前記領域ごとの画像群を前記領域が並ぶ順番に並べた表示画像を生成することを特徴とする請求項1又は2記載の医用画像表示装置。
【請求項4】
前記画像生成部は、前記複数の領域のうち同じ領域に分類された複数の画像を合成して任意方向の合成画像を生成し、
前記表示部は、前記合成画像を表示することを特徴とする請求項1ないし3のいずれか一に記載の医用画像表示装置。
【請求項5】
前記領域ごとに前記器官内撮像装置の滞留時間を算出する滞留時間算出部を備え、
前記画像生成部は、前記領域ごとに前記器官の延伸方向に沿って前記滞留時間を示す滞留時間画像を生成し、
前記表示部は、前記滞留時間画像を表示することを特徴とする請求項1ないし4のいずれか一に記載の医用画像表示装置。
【請求項6】
前記領域分割部は、前記画像ごとの前記器官内撮像装置の撮像位置に基づいて前記器官の延伸方向に延びる前記器官の芯線を求め、求めた前記芯線を軸心とする管状の仮想器官を求め、求めた前記仮想器官をその延伸方向に沿って前記複数の領域に分割することを特徴とする請求項1ないし5のいずれか一に記載の医用画像表示装置。
【請求項7】
前記画像分類部は、前記画像ごとに前記器官内撮像装置の撮像位置及び撮像姿勢を用いてその撮像位置を基準とする前記器官内撮像装置の撮像領域を求め、求めた前記画像ごとの前記器官内撮像装置の撮像領域に応じて前記器官に対する前記画像の位置を決定し、前記複数の領域に対して前記複数の画像を分類することを特徴とする請求項1ないし6のいずれか一に記載の医用画像表示装置。
【請求項8】
前記画像生成部は、前記仮想器官及び前記器官の芯線、前記仮想器官の分割位置を示す仮想器官画像を生成し、
前記表示部は、前記仮想器官画像を表示することを特徴とする請求項6記載の医用画像表示装置。
【請求項9】
前記画像生成部は、前記仮想器官画像として、前記仮想器官及び前記器官の芯線、前記仮想器官の分割位置に加え、前記仮想器官上で前記画像が存在する又は存在しない箇所を示す仮想器官画像を生成することを特徴とする請求項8記載の医用画像表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−85593(P2013−85593A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−226485(P2011−226485)
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月14日(2011.10.14)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]