
医用超音波イメージングにおける針の視覚化を向上させる方法、装置及びシステム
【課題】超音波イメージングにおける針の視覚化を向上させる方法、装置及びシステムを提供する。
【解決手段】患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階102と、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階104と、を有する。針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数、並びに収集された針フレームのエッジ強調フィルタリングのためのフィルタ・カーネルは、共に、走査深さに依存し、これによって、異なる深さで走査するための超音波イメージングにおいて針の視覚化の向上を、ユーザーが関与すること無く、達成することができる。
【解決手段】患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階102と、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階104と、を有する。針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数、並びに収集された針フレームのエッジ強調フィルタリングのためのフィルタ・カーネルは、共に、走査深さに依存し、これによって、異なる深さで走査するための超音波イメージングにおいて針の視覚化の向上を、ユーザーが関与すること無く、達成することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般的に云えば、超音波イメージング技術に関し、より詳しく云えば、異なる走査深さでの医用超音波イメージングにおける針(needle)の視覚化を向上させる方法、装置及びシステムに関するものである。
【背景技術】
【0002】
医療用具超音波誘導用途において、超音波画像における針の視覚化は、臨床医が侵襲性の超音波画像誘導による処置を首尾よく遂行するのに最重要な事柄である。
【0003】
Bステア(B steer) 、ステアXビーム(SteerXBeam)及び拡張ステアXビームのような医療用超音波システムにおける針の視覚化技術は、通常、針を視覚化し且つ強調するために、「針フレーム(needle frame)」と呼ばれる1つの特別な追加のフレームを使用しており、該フレームは、固定の大きなステアリング角度を持ち、また固定の超音波動作周波数を適用することによって収集される。針の誘導方向が針フレームのためのステアリング角度に対して垂直である場合、視覚化が向上する。そうでない場合は、針は超音波画像内で消失するか又は薄くなる。
【0004】
例えば、Danhua Zhao 等によって2001年5月15日に出願された「生検針の超音波イメージング方法及びシステム」と題する米国特許出願第6524247号には、穿刺針の実時間視覚化を向上させる方法が開示されており、該方法では、固定の走査角度(又は針フレーム・ステアリング角度)を用いて針フレームを収集している。Jianjun Guo 等によって2010年12月27日に出願された「超音波イメージングにおける針の視覚化を向上させる方法及び装置」と題する中国特許出願第201010624654.3号には、大きなステアリング角度(例えば、45°)による針フレームが開示されていて、多数の角度(例えば、25°及び45°)で走査することによって収集された複数のフレームを組み合わせることにより、針フレームを生成し、これによって、最適な効果が達成されることが教示されている。
【0005】
しかしながら、患者によって体形が大幅に異なるので、同じ部分又は組織(例えば、心臓)でも患者によって走査深さが異なり、また同じ患者でも部分又は組織が異なると走査深さが異なる。上記の従来技術では、走査深さが異なっていても超音波走査のために常に固定の針フレーム・ステアリング角度が用いられていて、患者の異なる走査される部分又は組織の深さの違いを無視している。その結果、固定の針フレーム・ステアリング角度が大きな(例えば、肥満体の)患者を走査するために用いられたとき、針が患者の身体内に皮膚にほぼ垂直に挿入されて、針が超音波ビームにほぼ平行に保持されるようになり、この結果、針が超音波画像内で消失又は薄くなる。従って、従来技術における固定の針フレーム・ステアリング角度及び超音波動作周波数によって収集された針フレームは、異なる深さにおける超音波誘導要件を満たすことができない。
【0006】
従って、上述の問題及び欠陥を避けるような方法、装置及びシステムを提供することが必要である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6524247号
【発明の概要】
【0008】
本発明は、針の視覚化を向上させるために、深さに依存した針フレーム・ステアリング角度、超音波動作周波数及びエッジ強調フィルタリングを針フレームに適用することによって、異なる深さで走査するように動作できる方法、装置及びシステムを提供する。
【0009】
本発明は、以下の技術的解決手法を用いる。
【0010】
本発明の第1の面では、本発明は、超音波イメージングにおける針の視覚化を向上させる方法を提供する。本方法は、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階と、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階と、を有する。
【0011】
本発明の好ましい一実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記方法は、更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調段階を有する。
【0012】
本発明の別の好ましい実施形態によれば、前記強調段階を遂行するためのフィルタ・カーネルを、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合させる。
【0013】
本発明の別の好ましい実施形態によれば、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められる。
【0014】
本発明の別の好ましい実施形態によれば、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、前記決定段階を遂行するときに予め保存されたテーブルの中から、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索する。
【0015】
本発明の別の好ましい実施形態によれば、前記予め保存されたテーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有する。
【0016】
本発明の別の好ましい実施形態によれば、前記決定段階を遂行するとき、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数が、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定される。
【0017】
本発明の別の好ましい実施形態によれば、走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くする。
【0018】
本発明の別の好ましい実施形態によれば、走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くする。
【0019】
本発明の第2の面では、本発明は、超音波イメージングにおける針の視覚化を向上させる装置を提供する。本装置は、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュールと、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュールと、を有する。
【0020】
本発明の好ましい一実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記装置は、更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュールを有する。
【0021】
本発明の別の好ましい実施形態によれば、前記強調モジュールは、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合するフィルタ・カーネルを用いる。
【0022】
本発明の別の好ましい実施形態によれば、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められる。
【0023】
本発明の別の好ましい実施形態によれば、前記決定モジュールは、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルの中から、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成される。
【0024】
本発明の別の好ましい実施形態によれば、前記決定モジュールは更に、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定するように構成される。
【0025】
本発明の別の好ましい実施形態によれば、走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くする。
【0026】
本発明の別の好ましい実施形態によれば、走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くする。
【0027】
本発明の別の好ましい実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記装置は、更に、前記テーブルを保存するためのメモリを有するか又はそれと通信する。
【0028】
本発明の第3の面では、本発明は、本発明の第2の面に従った超音波イメージングにおける針の視覚化を向上させる装置を有する超音波イメージング・システムを提供する。
【0029】
本発明の様々な実施形態に従った方法、装置及びシステムにおいて、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数、並びに収集された針フレームのエッジ強調フィルタリングのためのフィルタ・カーネルは、共に、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さに依存する。走査深さが患者の身体内の一部分又は組織のターゲットの深さにつれて変わるとき、針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数が自動的に調節され、そして走査深さに依存するエッジ強調フィルタリングが収集された針フレームについて遂行され、これによって、異なる深さで走査するための超音波イメージングにおいて針の視覚化の向上が、ユーザーの介在無しに達成され、その結果、超音波イメージングにおける針誘導のワークフローの改善が容易になり、また待ち時間の節約が容易になる。
【0030】
以下に、図面を参照して様々な実施形態に関連して本発明を具体的に説明する。図面中の同じ又は同様な要素は同じ参照数字で表す。
【図面の簡単な説明】
【0031】
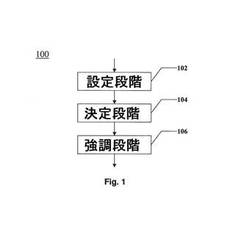
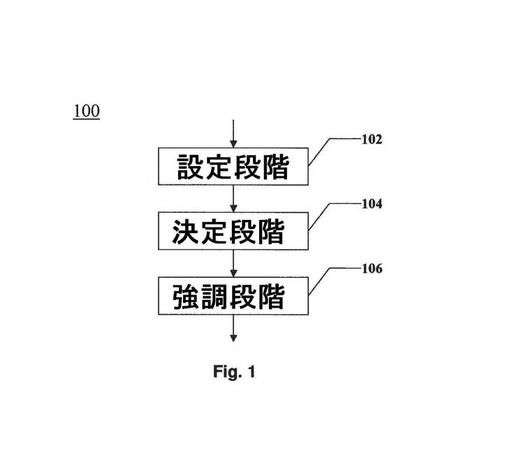
【図1】図1は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる方法の流れ図である。
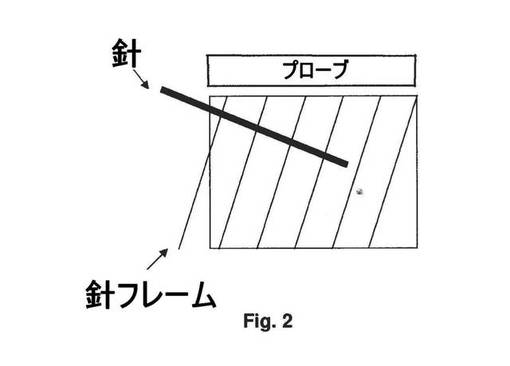
【図2】図2は、本発明に従って図1の方法を浅い深さに適用した場合を例示する略図である。
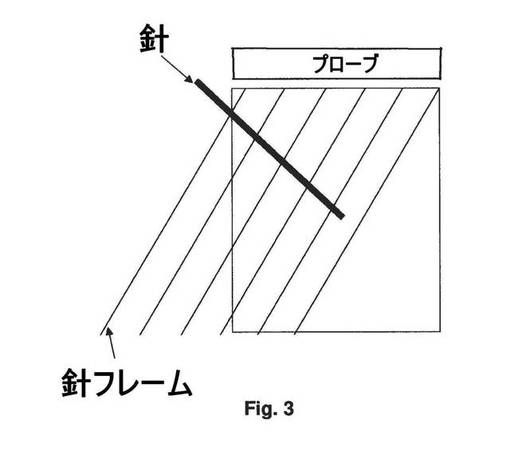
【図3】図3は、本発明に従って図1の方法を深い深さに適用した場合を例示する略図である。
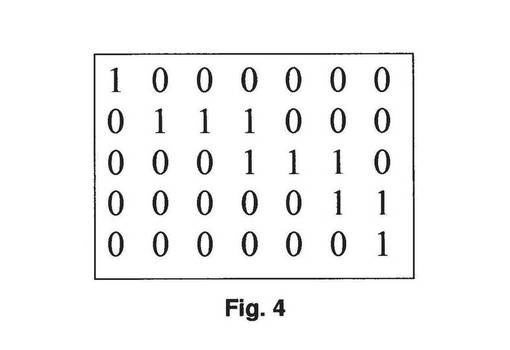
【図4】図4は、針フレーム・ステアリング角度が30°であるときのエッジ強調フィルタのカーネルの構成を例示する。
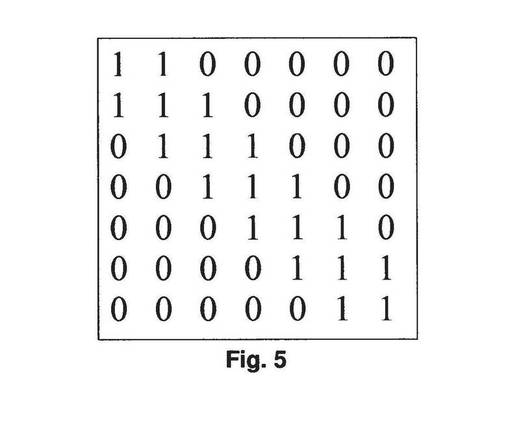
【図5】図5は、針フレーム・ステアリング角度が45°であるときのエッジ強調フィルタのカーネルの構成を例示する。
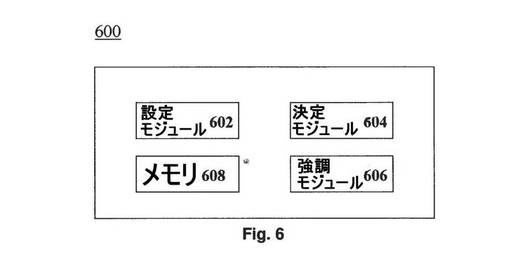
【図6】図6は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる装置の概略構成図である。
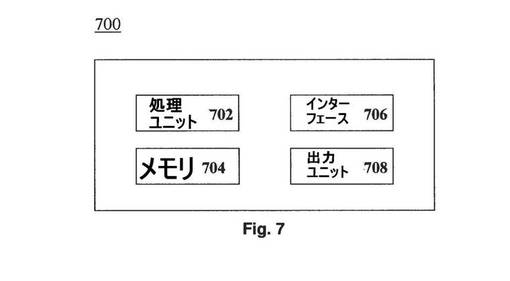
【図7】図7は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる別の装置の概略構成図である。
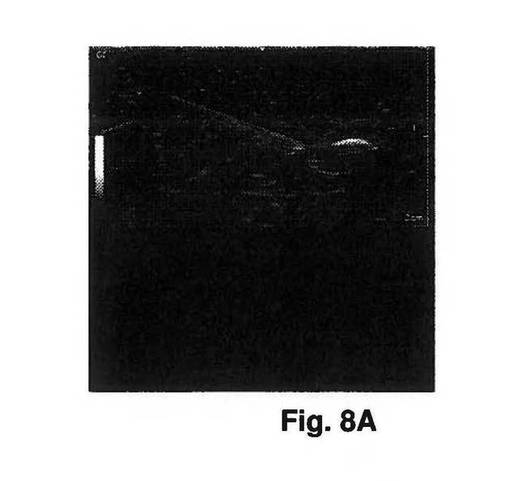
【図8A】図8Aは、浅い深さに適用した従来技術により得られる針フレームを例示する。
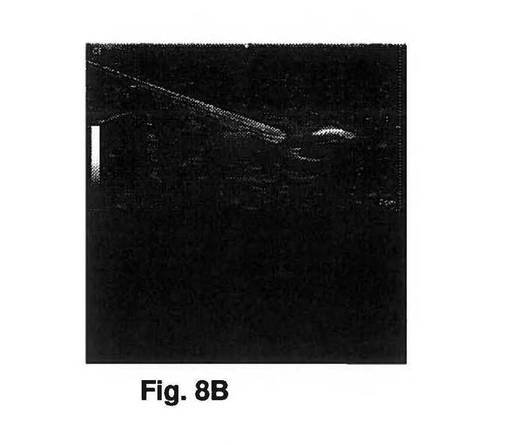
【図8B】図8Bは、浅い深さに適用した本発明の技術により得られる針フレームを例示する。
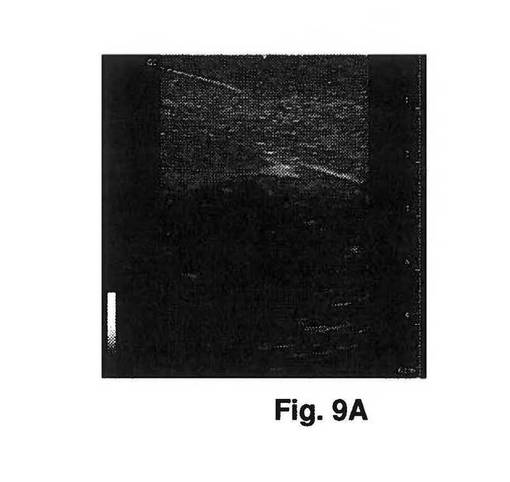
【図9A】図9Aは、深い深さに適用した従来技術により得られる針フレームを例示する。
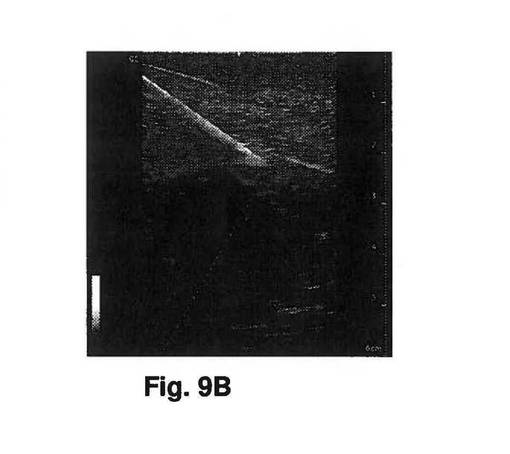
【図9B】図9Bは、深い深さに適用した本発明の技術により得られる針フレームを例示する。
【発明を実施するための形態】
【0032】
多くの医療処置では、患者の身体内の一部分又は組織のターゲットへ様々な侵襲性医療器具を差し向けるために針のような医療器具を超音波誘導することを必要としている。部分又は組織のターゲットへ針を安全に素速く差し向けるために、超音波画像で針の視覚化を向上させることが必要である。
【0033】
針は高反射性の物体である。走査角度が針の角度に対して垂直又は実質的に垂直であるとき、超音波画像における針の視覚化は顕著である。伝統的な医用イメージング技術では、超音波画像で針の視覚化を向上させるために針フレームが用いられている。針フレームを収集するために固定の大きなステアリング角度及び固定の超音波動作周波数が通常用いられている。異なる患者について医療器具の超音波誘導を実施する場合、患者の身体内の部分又は組織のターゲットの深さが変わるときに、針フレーム・ステアリング角度、超音波動作周波数及びフィルタ設定値を含むパラメータが変更されずに保持されており、これは、超音波画像における針の視覚化の向上に影響を及ぼす。
【0034】
従って、本発明で取り上げた技術に従って、針フレーム・ステアリング角度、超音波動作周波数及び/又はフィルタ設定値のようなパラメータは、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに依存するように構成される。換言すると、本発明の様々な実施形態によれば、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数は、走査深さが患者の身体内の部分又は組織のターゲットの深さにつれて変わるとき、それに対応して変更される。
【0035】
図1は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる方法100の流れ図を示す。図に示されているように、段階102において、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さが設定される。例えば、臨床医が患者の身体内の部分又は組織のターゲットの深さを約10cmと推定したとき、臨床医は、該部分又は組織のターゲットが、収集された組織フレーム及び針フレームのほぼ中心位置にあるように、インターフェースを介して約15cmの走査深さを設定することができる。ここで、当業者には、上記のデータが実証を目的としたものに過ぎず、本発明を制限しないことが理解されよう。
【0036】
段階104において、段階102で設定された患者の身体内の部分又は組織のターゲットの深さに対応する走査深さが、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する。例えば、針フレーム収集のための好ましい針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルの中から、設定された走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索することができる。予め保存されたテーブルは、各々が好ましい所定の針フレーム・ステアリング角度及び好ましい所定の超音波動作周波数に対応する複数の走査深さ値を有することができる。表1は、模範的なテーブルを示す。
【0037】
【表1】

【0038】
表1は、走査深さ値と所定の針フレーム・ステアリング角度と所定の超音波動作周波数との複数の組合せの実証例を示す。当業者には、表1に列挙された3つのパラメータの様々な組合せが、実証を目的としたものに過ぎず、本発明を制限しないことが理解されよう。例えば、表1中の走査深さ値は1.0cmの段階的長さずつ大きくなっているが、当業者には、深さ値が実際には任意の段階的長さ(例えば、0.5cm、0.1cm)ずつ大きくなるようにすることができることが理解されよう。所与の深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数は、超音波イメージング・システム内の関連した構成要素(例えば、プローブ)の属性に左右される。表中の各々の深さ値に対応する好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数は、実験及び/又はシミュレーションにより決定することができる。
【0039】
通常、走査深さ値が小さくなればなるほど、対応する好ましい針フレーム・ステアリング角度をより小さくし且つ対応する好ましい超音波動作周波数をより高くする。逆に、走査深さ値が大きくなればなるほど、対応する好ましい針フレーム・ステアリング角度をより大きくし且つ対応する好ましい超音波動作周波数をより低くする。
【0040】
段階104において、段階102で設定された患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに等しい深さ値が、表(テーブル)の中に見つけられなかった場合、表中に設定された走査深さに最も近い深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定する。
【0041】
随意選択による強調段階106において、エッジ強調フィルタリングが、収集された針フレームについて遂行される。Jianjun Guo 等によって2010年12月27日に出願された「超音波イメージングにおける針の視覚化を向上させる方法及び装置」と題する中国特許出願第201010624654.3号には、エッジ強調フィルタによりエッジ強調フィルタリング技術を収集された針フレームに適用する方法が提案されている。この特許出願の内容は、ここに引用することによって本書に取り入れる。図4は、針フレーム収集のための針フレーム・ステアリング角度が30°であるときのエッジ強調フィルタのカーネルの構成を例示する。図5は、針フレーム収集のための針フレーム・ステアリング角度が45°であるときのエッジ強調フィルタのカーネルの構成を例示する。これらの図に示されているように、エッジ強調フィルタのカーネルは、針フレーム収集のための針フレーム・ステアリング角度に整合する。すなわち、非ゼロの係数が、エッジ強調フィルタ・カーネル内で針の方向に沿って定められ、この場合、非ゼロの係数は、例えば、1とすることができるが、1に制限されない。
【0042】
前に述べたように、収集された針フレームについてエッジ強調フィルタリングを遂行するとき、エッジ強調フィルタ・カーネルは、段階104で決定された針フレーム収集のための針フレーム・ステアリング角度に従って構成され、その結果のエッジ強調フィルタ・カーネルは、収集された針フレームと相互相関(重畳積分)され、これによって、針フレーム中の針信号を強調し且つ針フレーム中の他の組織の信号及びアーティファクトを抑圧する。その上、針フレーム収集のための針フレーム・ステアリング角度が患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに左右されるので、針フレーム・ステアリング角度に従って構成されたエッジ強調フィルタ・カーネルもまた走査深さに関連し、従って、図4に示される相対的に浅い針では検出レベルが低くなり、また図5に示される相対的に深い針では検出レベルが高くなることがある。
【0043】
本発明の幾つかの実施形態について、更に図2及び図3を参照して以下に説明する。
【0044】
図2は、本発明の一実施形態に従って、浅い深さ(例えば、小さい又は細身の患者、或いは患者の皮膚に近い生体内部分又は組織のターゲット)に適用した場合を例示する。この実施形態では、部分又は組織のターゲットは患者の身体内の約1.0cmの深さにある。従って、走査深さは約2.0cmになるように設定することができる。このような浅い深さの用途では、部分又は組織のターゲット及び針は、通常、超音波画像の近距離場の中に位置する。この場合、針フレーム収集のための針フレーム・ステアリング角度は、超音波画像における針の視覚化を向上させ且つ超音波画像全体の品質を改善することのできる小さな角度となるように構成される。この実施形態では、針フレーム収集のための針フレーム・ステアリング角度は、20.0°になるように設定される。他方、このような浅い深さの用途で超音波画像分解能及び針の出現・外観を増強するために、より高い超音波動作周波数が使用される。この実施形態では、針フレーム収集のための超音波動作周波数は、13.0MHzよりも高くなるように設定される。
【0045】
図3は、本発明の一実施形態に従って深い深さ(例えば、大きい又は肥満した患者、或いは患者の皮膚から離れた生体内部分又は組織のターゲット)に適用した場合を例示する。この実施形態では、部分又は組織のターゲットが患者の身体内の約2.0cmの深さにある。従って、走査深さは約4.0cmになるように設定することができる。このような深い深さの用途では、超音波画像の遠距離場にある部分又は組織のターゲット及び針は臨床医に取って関心のあるものである。この場合、針の誘導が大きな角度で非常に急峻である。このことから、針フレーム収集のための針フレーム・ステアリング角度は、針からの超音波信号の反射を増強させるように大きな角度になるように構成すべきである。この実施形態では、針フレーム収集のための針フレーム・ステアリング角度は30.0°になるように設定される。
【0046】
超音波イメージング・システム内のプローブの受波角度が制限されているので、大きな針フレーム・ステアリング角度は、収集された針フレームにかなりのノイズ及びアーティファクトを生じさせる。従って、深い深さの用途では相対的に低い超音波動作周波数を適用して、超音波場の指向性関数の主ローブを拡張させ、これによって、針フレーム中のノイズ及びアーティファクトを低減する。この実施形態では、針フレーム収集のための超音波動作周波数は、相対的に低い10.0MHzになるように設定される。その上、深い深さの場合における相対的に低い超音波動作周波数はまた、患者の身体内の相対的に深い位置にある部分又は組織のターゲット及び針へ生体内組織を通る超音波の侵入を増大させ、その結果、超音波画像における針の視覚化を増強させる。
【0047】
図6は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる装置600のモジュール化したブロック図を示す。
【0048】
装置600は、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュール602と、設定された走査深さに基づいて針フレーム収集のための好ましい針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュール604とを有する。設定された走査深さが浅くなればなるほど、針フレーム収集のための好ましい針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための好ましい超音波動作周波数をより高くする。また、設定された走査深さが深くなればなるほど、針フレーム収集のための好ましい針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための好ましい超音波動作周波数をより低くする。
【0049】
決定モジュール604は、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、メモリ608によって保存されているテーブルの中から、設定された走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成される。具体的に述べると、決定モジュール604は、針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数として、テーブルの中の、設定された走査深さに等しいか又はそれに最も近い深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を使用するように構成される。
【0050】
装置600は、随意選択により、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュール606を有し、この場合、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数(例えば、1であるが、1に制限されない)が定められる。
【0051】
装置600は更に、設定された走査深さに基づいて針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数を決定するために必要なテーブルを保存するためのメモリ608を有し又はそれと通信することができる。テーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有する。
【0052】
図6に示されているような装置600内の1つ以上のモジュールは、ソフトウエア、ハードウエア、ファームウエア、又はそれらの組合せによって具現化することができる。
【0053】
図7は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる別の装置700を示す概略構成図である。図に示されているように、装置700は、MCU、DSP又はCPUのような処理ユニット702を有する。処理ユニット702は、図1の方法の相異なる段階を遂行するために1つ以上のユニットを有することができる。装置700は更に、前に述べたテーブルを保存するためのメモリ704を有し又はそれと通信することができる。装置700は、随意選択により、設定された走査深さ及び収集された針画像データを入力するためのインターフェース706と、処理された針画像データを出力するための出力ユニット708を有する。
【0054】
上述の実施形態に従った超音波イメージングにおける針の視覚化を向上させる装置600又は700は、様々な超音波イメージング・システムにおいてソフトウエア、ハードウエア、ファームウエア、又はそれらの様々な組合せによって具現化することができ、それは当業者には容易に達成可能であり、従って簡単化のために詳しくは説明しない。
【0055】
図8Aは、浅い深さに適用した従来技術により得られる針強調画像を例示する。また、図8Bは、浅い深さに適用した本発明の技術により得られる針強調画像を例示する。浅い深さの用途では、走査深さは2cmになるように設定される。図に示されているように、本発明の技術によって得られる針の視覚化は、従来の技術によって得られる針強調画像と比較して、顕著に向上する。
【0056】
図9Aは、深い深さに適用した従来技術により得られる強調画像を例示する。また、図9Bは、深い深さに適用した本発明の技術により得られる強調画像を例示する。深い深さの用途では、走査深さは6cmになるように設定される。図に示されているように、本発明の技術によって得られる針の視覚化は、従来の技術によって得られる針強調画像と比較して、顕著に向上する。
【0057】
以上、特定の好ましい実施形態によって本発明を詳しく説明した。しかしながら、本発明のこれらの特定の実施形態は、その説明に限定されるものとして解釈すべきではない。当業者には、本書の開示内容に対して様々な修正、等価置換及び変更を行うことができることが理解されよう。例えば、その機能は、上記の実施形態における1つの段階又はモジュールを2つ以上の段階又はモジュールに分割することによって達成することができる。或いはその逆に、上記の実施形態における2つ以上の段階又はモジュールの機能は、1つの段階又はモジュール内で達成することができる。このような変更が本発明の精神から逸脱しない限り、それらは本発明の保護範囲内にあると考えるべきである。更に、本発明の明細書及び請求の範囲の中の幾つかの用語は、限定するものではなく、説明するためのものである。また、本書で何度か用いられている「一実施形態」、「別の実施形態」などは、相異なる実施形態を表しており、その全体又は一部を1つの実施形態の中に取り入れることができる。
【符号の説明】
【0058】
100 針の視覚化を向上させる方法
600 針の視覚化を向上させる装置
700 針の視覚化を向上させる装置
【技術分野】
【0001】
本発明は、一般的に云えば、超音波イメージング技術に関し、より詳しく云えば、異なる走査深さでの医用超音波イメージングにおける針(needle)の視覚化を向上させる方法、装置及びシステムに関するものである。
【背景技術】
【0002】
医療用具超音波誘導用途において、超音波画像における針の視覚化は、臨床医が侵襲性の超音波画像誘導による処置を首尾よく遂行するのに最重要な事柄である。
【0003】
Bステア(B steer) 、ステアXビーム(SteerXBeam)及び拡張ステアXビームのような医療用超音波システムにおける針の視覚化技術は、通常、針を視覚化し且つ強調するために、「針フレーム(needle frame)」と呼ばれる1つの特別な追加のフレームを使用しており、該フレームは、固定の大きなステアリング角度を持ち、また固定の超音波動作周波数を適用することによって収集される。針の誘導方向が針フレームのためのステアリング角度に対して垂直である場合、視覚化が向上する。そうでない場合は、針は超音波画像内で消失するか又は薄くなる。
【0004】
例えば、Danhua Zhao 等によって2001年5月15日に出願された「生検針の超音波イメージング方法及びシステム」と題する米国特許出願第6524247号には、穿刺針の実時間視覚化を向上させる方法が開示されており、該方法では、固定の走査角度(又は針フレーム・ステアリング角度)を用いて針フレームを収集している。Jianjun Guo 等によって2010年12月27日に出願された「超音波イメージングにおける針の視覚化を向上させる方法及び装置」と題する中国特許出願第201010624654.3号には、大きなステアリング角度(例えば、45°)による針フレームが開示されていて、多数の角度(例えば、25°及び45°)で走査することによって収集された複数のフレームを組み合わせることにより、針フレームを生成し、これによって、最適な効果が達成されることが教示されている。
【0005】
しかしながら、患者によって体形が大幅に異なるので、同じ部分又は組織(例えば、心臓)でも患者によって走査深さが異なり、また同じ患者でも部分又は組織が異なると走査深さが異なる。上記の従来技術では、走査深さが異なっていても超音波走査のために常に固定の針フレーム・ステアリング角度が用いられていて、患者の異なる走査される部分又は組織の深さの違いを無視している。その結果、固定の針フレーム・ステアリング角度が大きな(例えば、肥満体の)患者を走査するために用いられたとき、針が患者の身体内に皮膚にほぼ垂直に挿入されて、針が超音波ビームにほぼ平行に保持されるようになり、この結果、針が超音波画像内で消失又は薄くなる。従って、従来技術における固定の針フレーム・ステアリング角度及び超音波動作周波数によって収集された針フレームは、異なる深さにおける超音波誘導要件を満たすことができない。
【0006】
従って、上述の問題及び欠陥を避けるような方法、装置及びシステムを提供することが必要である。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】米国特許第6524247号
【発明の概要】
【0008】
本発明は、針の視覚化を向上させるために、深さに依存した針フレーム・ステアリング角度、超音波動作周波数及びエッジ強調フィルタリングを針フレームに適用することによって、異なる深さで走査するように動作できる方法、装置及びシステムを提供する。
【0009】
本発明は、以下の技術的解決手法を用いる。
【0010】
本発明の第1の面では、本発明は、超音波イメージングにおける針の視覚化を向上させる方法を提供する。本方法は、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階と、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階と、を有する。
【0011】
本発明の好ましい一実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記方法は、更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調段階を有する。
【0012】
本発明の別の好ましい実施形態によれば、前記強調段階を遂行するためのフィルタ・カーネルを、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合させる。
【0013】
本発明の別の好ましい実施形態によれば、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められる。
【0014】
本発明の別の好ましい実施形態によれば、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、前記決定段階を遂行するときに予め保存されたテーブルの中から、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索する。
【0015】
本発明の別の好ましい実施形態によれば、前記予め保存されたテーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有する。
【0016】
本発明の別の好ましい実施形態によれば、前記決定段階を遂行するとき、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数が、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定される。
【0017】
本発明の別の好ましい実施形態によれば、走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くする。
【0018】
本発明の別の好ましい実施形態によれば、走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くする。
【0019】
本発明の第2の面では、本発明は、超音波イメージングにおける針の視覚化を向上させる装置を提供する。本装置は、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュールと、前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュールと、を有する。
【0020】
本発明の好ましい一実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記装置は、更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュールを有する。
【0021】
本発明の別の好ましい実施形態によれば、前記強調モジュールは、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合するフィルタ・カーネルを用いる。
【0022】
本発明の別の好ましい実施形態によれば、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められる。
【0023】
本発明の別の好ましい実施形態によれば、前記決定モジュールは、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルの中から、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成される。
【0024】
本発明の別の好ましい実施形態によれば、前記決定モジュールは更に、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定するように構成される。
【0025】
本発明の別の好ましい実施形態によれば、走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くする。
【0026】
本発明の別の好ましい実施形態によれば、走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くする。
【0027】
本発明の別の好ましい実施形態によれば、超音波イメージングにおける針の視覚化を向上させる前記装置は、更に、前記テーブルを保存するためのメモリを有するか又はそれと通信する。
【0028】
本発明の第3の面では、本発明は、本発明の第2の面に従った超音波イメージングにおける針の視覚化を向上させる装置を有する超音波イメージング・システムを提供する。
【0029】
本発明の様々な実施形態に従った方法、装置及びシステムにおいて、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数、並びに収集された針フレームのエッジ強調フィルタリングのためのフィルタ・カーネルは、共に、患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さに依存する。走査深さが患者の身体内の一部分又は組織のターゲットの深さにつれて変わるとき、針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数が自動的に調節され、そして走査深さに依存するエッジ強調フィルタリングが収集された針フレームについて遂行され、これによって、異なる深さで走査するための超音波イメージングにおいて針の視覚化の向上が、ユーザーの介在無しに達成され、その結果、超音波イメージングにおける針誘導のワークフローの改善が容易になり、また待ち時間の節約が容易になる。
【0030】
以下に、図面を参照して様々な実施形態に関連して本発明を具体的に説明する。図面中の同じ又は同様な要素は同じ参照数字で表す。
【図面の簡単な説明】
【0031】
【図1】図1は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる方法の流れ図である。
【図2】図2は、本発明に従って図1の方法を浅い深さに適用した場合を例示する略図である。
【図3】図3は、本発明に従って図1の方法を深い深さに適用した場合を例示する略図である。
【図4】図4は、針フレーム・ステアリング角度が30°であるときのエッジ強調フィルタのカーネルの構成を例示する。
【図5】図5は、針フレーム・ステアリング角度が45°であるときのエッジ強調フィルタのカーネルの構成を例示する。
【図6】図6は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる装置の概略構成図である。
【図7】図7は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる別の装置の概略構成図である。
【図8A】図8Aは、浅い深さに適用した従来技術により得られる針フレームを例示する。
【図8B】図8Bは、浅い深さに適用した本発明の技術により得られる針フレームを例示する。
【図9A】図9Aは、深い深さに適用した従来技術により得られる針フレームを例示する。
【図9B】図9Bは、深い深さに適用した本発明の技術により得られる針フレームを例示する。
【発明を実施するための形態】
【0032】
多くの医療処置では、患者の身体内の一部分又は組織のターゲットへ様々な侵襲性医療器具を差し向けるために針のような医療器具を超音波誘導することを必要としている。部分又は組織のターゲットへ針を安全に素速く差し向けるために、超音波画像で針の視覚化を向上させることが必要である。
【0033】
針は高反射性の物体である。走査角度が針の角度に対して垂直又は実質的に垂直であるとき、超音波画像における針の視覚化は顕著である。伝統的な医用イメージング技術では、超音波画像で針の視覚化を向上させるために針フレームが用いられている。針フレームを収集するために固定の大きなステアリング角度及び固定の超音波動作周波数が通常用いられている。異なる患者について医療器具の超音波誘導を実施する場合、患者の身体内の部分又は組織のターゲットの深さが変わるときに、針フレーム・ステアリング角度、超音波動作周波数及びフィルタ設定値を含むパラメータが変更されずに保持されており、これは、超音波画像における針の視覚化の向上に影響を及ぼす。
【0034】
従って、本発明で取り上げた技術に従って、針フレーム・ステアリング角度、超音波動作周波数及び/又はフィルタ設定値のようなパラメータは、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに依存するように構成される。換言すると、本発明の様々な実施形態によれば、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数は、走査深さが患者の身体内の部分又は組織のターゲットの深さにつれて変わるとき、それに対応して変更される。
【0035】
図1は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる方法100の流れ図を示す。図に示されているように、段階102において、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さが設定される。例えば、臨床医が患者の身体内の部分又は組織のターゲットの深さを約10cmと推定したとき、臨床医は、該部分又は組織のターゲットが、収集された組織フレーム及び針フレームのほぼ中心位置にあるように、インターフェースを介して約15cmの走査深さを設定することができる。ここで、当業者には、上記のデータが実証を目的としたものに過ぎず、本発明を制限しないことが理解されよう。
【0036】
段階104において、段階102で設定された患者の身体内の部分又は組織のターゲットの深さに対応する走査深さが、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する。例えば、針フレーム収集のための好ましい針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルの中から、設定された走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索することができる。予め保存されたテーブルは、各々が好ましい所定の針フレーム・ステアリング角度及び好ましい所定の超音波動作周波数に対応する複数の走査深さ値を有することができる。表1は、模範的なテーブルを示す。
【0037】
【表1】
【0038】
表1は、走査深さ値と所定の針フレーム・ステアリング角度と所定の超音波動作周波数との複数の組合せの実証例を示す。当業者には、表1に列挙された3つのパラメータの様々な組合せが、実証を目的としたものに過ぎず、本発明を制限しないことが理解されよう。例えば、表1中の走査深さ値は1.0cmの段階的長さずつ大きくなっているが、当業者には、深さ値が実際には任意の段階的長さ(例えば、0.5cm、0.1cm)ずつ大きくなるようにすることができることが理解されよう。所与の深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数は、超音波イメージング・システム内の関連した構成要素(例えば、プローブ)の属性に左右される。表中の各々の深さ値に対応する好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数は、実験及び/又はシミュレーションにより決定することができる。
【0039】
通常、走査深さ値が小さくなればなるほど、対応する好ましい針フレーム・ステアリング角度をより小さくし且つ対応する好ましい超音波動作周波数をより高くする。逆に、走査深さ値が大きくなればなるほど、対応する好ましい針フレーム・ステアリング角度をより大きくし且つ対応する好ましい超音波動作周波数をより低くする。
【0040】
段階104において、段階102で設定された患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに等しい深さ値が、表(テーブル)の中に見つけられなかった場合、表中に設定された走査深さに最も近い深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定する。
【0041】
随意選択による強調段階106において、エッジ強調フィルタリングが、収集された針フレームについて遂行される。Jianjun Guo 等によって2010年12月27日に出願された「超音波イメージングにおける針の視覚化を向上させる方法及び装置」と題する中国特許出願第201010624654.3号には、エッジ強調フィルタによりエッジ強調フィルタリング技術を収集された針フレームに適用する方法が提案されている。この特許出願の内容は、ここに引用することによって本書に取り入れる。図4は、針フレーム収集のための針フレーム・ステアリング角度が30°であるときのエッジ強調フィルタのカーネルの構成を例示する。図5は、針フレーム収集のための針フレーム・ステアリング角度が45°であるときのエッジ強調フィルタのカーネルの構成を例示する。これらの図に示されているように、エッジ強調フィルタのカーネルは、針フレーム収集のための針フレーム・ステアリング角度に整合する。すなわち、非ゼロの係数が、エッジ強調フィルタ・カーネル内で針の方向に沿って定められ、この場合、非ゼロの係数は、例えば、1とすることができるが、1に制限されない。
【0042】
前に述べたように、収集された針フレームについてエッジ強調フィルタリングを遂行するとき、エッジ強調フィルタ・カーネルは、段階104で決定された針フレーム収集のための針フレーム・ステアリング角度に従って構成され、その結果のエッジ強調フィルタ・カーネルは、収集された針フレームと相互相関(重畳積分)され、これによって、針フレーム中の針信号を強調し且つ針フレーム中の他の組織の信号及びアーティファクトを抑圧する。その上、針フレーム収集のための針フレーム・ステアリング角度が患者の身体内の部分又は組織のターゲットの深さに対応する走査深さに左右されるので、針フレーム・ステアリング角度に従って構成されたエッジ強調フィルタ・カーネルもまた走査深さに関連し、従って、図4に示される相対的に浅い針では検出レベルが低くなり、また図5に示される相対的に深い針では検出レベルが高くなることがある。
【0043】
本発明の幾つかの実施形態について、更に図2及び図3を参照して以下に説明する。
【0044】
図2は、本発明の一実施形態に従って、浅い深さ(例えば、小さい又は細身の患者、或いは患者の皮膚に近い生体内部分又は組織のターゲット)に適用した場合を例示する。この実施形態では、部分又は組織のターゲットは患者の身体内の約1.0cmの深さにある。従って、走査深さは約2.0cmになるように設定することができる。このような浅い深さの用途では、部分又は組織のターゲット及び針は、通常、超音波画像の近距離場の中に位置する。この場合、針フレーム収集のための針フレーム・ステアリング角度は、超音波画像における針の視覚化を向上させ且つ超音波画像全体の品質を改善することのできる小さな角度となるように構成される。この実施形態では、針フレーム収集のための針フレーム・ステアリング角度は、20.0°になるように設定される。他方、このような浅い深さの用途で超音波画像分解能及び針の出現・外観を増強するために、より高い超音波動作周波数が使用される。この実施形態では、針フレーム収集のための超音波動作周波数は、13.0MHzよりも高くなるように設定される。
【0045】
図3は、本発明の一実施形態に従って深い深さ(例えば、大きい又は肥満した患者、或いは患者の皮膚から離れた生体内部分又は組織のターゲット)に適用した場合を例示する。この実施形態では、部分又は組織のターゲットが患者の身体内の約2.0cmの深さにある。従って、走査深さは約4.0cmになるように設定することができる。このような深い深さの用途では、超音波画像の遠距離場にある部分又は組織のターゲット及び針は臨床医に取って関心のあるものである。この場合、針の誘導が大きな角度で非常に急峻である。このことから、針フレーム収集のための針フレーム・ステアリング角度は、針からの超音波信号の反射を増強させるように大きな角度になるように構成すべきである。この実施形態では、針フレーム収集のための針フレーム・ステアリング角度は30.0°になるように設定される。
【0046】
超音波イメージング・システム内のプローブの受波角度が制限されているので、大きな針フレーム・ステアリング角度は、収集された針フレームにかなりのノイズ及びアーティファクトを生じさせる。従って、深い深さの用途では相対的に低い超音波動作周波数を適用して、超音波場の指向性関数の主ローブを拡張させ、これによって、針フレーム中のノイズ及びアーティファクトを低減する。この実施形態では、針フレーム収集のための超音波動作周波数は、相対的に低い10.0MHzになるように設定される。その上、深い深さの場合における相対的に低い超音波動作周波数はまた、患者の身体内の相対的に深い位置にある部分又は組織のターゲット及び針へ生体内組織を通る超音波の侵入を増大させ、その結果、超音波画像における針の視覚化を増強させる。
【0047】
図6は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる装置600のモジュール化したブロック図を示す。
【0048】
装置600は、患者の身体内の部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュール602と、設定された走査深さに基づいて針フレーム収集のための好ましい針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュール604とを有する。設定された走査深さが浅くなればなるほど、針フレーム収集のための好ましい針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための好ましい超音波動作周波数をより高くする。また、設定された走査深さが深くなればなるほど、針フレーム収集のための好ましい針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための好ましい超音波動作周波数をより低くする。
【0049】
決定モジュール604は、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、メモリ608によって保存されているテーブルの中から、設定された走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成される。具体的に述べると、決定モジュール604は、針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数として、テーブルの中の、設定された走査深さに等しいか又はそれに最も近い深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を使用するように構成される。
【0050】
装置600は、随意選択により、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュール606を有し、この場合、針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数(例えば、1であるが、1に制限されない)が定められる。
【0051】
装置600は更に、設定された走査深さに基づいて針フレーム収集のための好ましい針フレーム・ステアリング角度及び好ましい超音波動作周波数を決定するために必要なテーブルを保存するためのメモリ608を有し又はそれと通信することができる。テーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有する。
【0052】
図6に示されているような装置600内の1つ以上のモジュールは、ソフトウエア、ハードウエア、ファームウエア、又はそれらの組合せによって具現化することができる。
【0053】
図7は、本発明の一実施形態に従った、超音波イメージングにおける針の視覚化を向上させる別の装置700を示す概略構成図である。図に示されているように、装置700は、MCU、DSP又はCPUのような処理ユニット702を有する。処理ユニット702は、図1の方法の相異なる段階を遂行するために1つ以上のユニットを有することができる。装置700は更に、前に述べたテーブルを保存するためのメモリ704を有し又はそれと通信することができる。装置700は、随意選択により、設定された走査深さ及び収集された針画像データを入力するためのインターフェース706と、処理された針画像データを出力するための出力ユニット708を有する。
【0054】
上述の実施形態に従った超音波イメージングにおける針の視覚化を向上させる装置600又は700は、様々な超音波イメージング・システムにおいてソフトウエア、ハードウエア、ファームウエア、又はそれらの様々な組合せによって具現化することができ、それは当業者には容易に達成可能であり、従って簡単化のために詳しくは説明しない。
【0055】
図8Aは、浅い深さに適用した従来技術により得られる針強調画像を例示する。また、図8Bは、浅い深さに適用した本発明の技術により得られる針強調画像を例示する。浅い深さの用途では、走査深さは2cmになるように設定される。図に示されているように、本発明の技術によって得られる針の視覚化は、従来の技術によって得られる針強調画像と比較して、顕著に向上する。
【0056】
図9Aは、深い深さに適用した従来技術により得られる強調画像を例示する。また、図9Bは、深い深さに適用した本発明の技術により得られる強調画像を例示する。深い深さの用途では、走査深さは6cmになるように設定される。図に示されているように、本発明の技術によって得られる針の視覚化は、従来の技術によって得られる針強調画像と比較して、顕著に向上する。
【0057】
以上、特定の好ましい実施形態によって本発明を詳しく説明した。しかしながら、本発明のこれらの特定の実施形態は、その説明に限定されるものとして解釈すべきではない。当業者には、本書の開示内容に対して様々な修正、等価置換及び変更を行うことができることが理解されよう。例えば、その機能は、上記の実施形態における1つの段階又はモジュールを2つ以上の段階又はモジュールに分割することによって達成することができる。或いはその逆に、上記の実施形態における2つ以上の段階又はモジュールの機能は、1つの段階又はモジュール内で達成することができる。このような変更が本発明の精神から逸脱しない限り、それらは本発明の保護範囲内にあると考えるべきである。更に、本発明の明細書及び請求の範囲の中の幾つかの用語は、限定するものではなく、説明するためのものである。また、本書で何度か用いられている「一実施形態」、「別の実施形態」などは、相異なる実施形態を表しており、その全体又は一部を1つの実施形態の中に取り入れることができる。
【符号の説明】
【0058】
100 針の視覚化を向上させる方法
600 針の視覚化を向上させる装置
700 針の視覚化を向上させる装置
【特許請求の範囲】
【請求項1】
超音波イメージングにおける針の視覚化を向上させる方法であって、
患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階と、
前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階と、
を有する方法。
【請求項2】
更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調段階を有する請求項1記載の方法。
【請求項3】
前記強調段階を遂行するためのフィルタ・カーネルが、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合することを特徴とする請求項2記載の方法。
【請求項4】
針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められることを特徴とする請求項3記載の方法。
【請求項5】
前記決定段階を遂行するとき、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルから、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索することを特徴とする請求項1記載の方法。
【請求項6】
前記予め保存されたテーブルが、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有することを特徴とする請求項5記載の方法。
【請求項7】
複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数が、前記決定段階を遂行するときに針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定されることを特徴とする請求項6記載の方法。
【請求項8】
走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くすることを特徴とする請求項1記載の方法。
【請求項9】
走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くすることを特徴とする請求項1記載の方法。
【請求項10】
超音波イメージングにおける針の視覚化を向上させる装置であって、
患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュールと、
前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュールと、
を有する装置。
【請求項11】
更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュールを有する請求項10記載の装置。
【請求項12】
前記強調モジュールは、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合するフィルタ・カーネルを用いることを特徴とする請求項11記載の装置。
【請求項13】
針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められていることを特徴とする請求項12記載の装置。
【請求項14】
前記決定モジュールは、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルから、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成されていることを特徴とする請求項10記載の装置。
【請求項15】
前記予め保存されたテーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有することを特徴とする請求項14記載の装置。
【請求項16】
前記決定モジュールは更に、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定するように構成されていることを特徴とする請求項15記載の装置。
【請求項17】
走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くすることを特徴とする請求項10記載の装置。
【請求項18】
走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くすることを特徴とする請求項10記載の装置。
【請求項19】
更に、前記テーブルを保存するためのメモリを有している請求項14記載の装置。
【請求項20】
請求項10〜19のいずれか1項に記載の超音波イメージングにおける針の視覚化を向上させる装置を有する超音波イメージング・システム。
【請求項1】
超音波イメージングにおける針の視覚化を向上させる方法であって、
患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定段階と、
前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定段階と、
を有する方法。
【請求項2】
更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調段階を有する請求項1記載の方法。
【請求項3】
前記強調段階を遂行するためのフィルタ・カーネルが、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合することを特徴とする請求項2記載の方法。
【請求項4】
針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められることを特徴とする請求項3記載の方法。
【請求項5】
前記決定段階を遂行するとき、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルから、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索することを特徴とする請求項1記載の方法。
【請求項6】
前記予め保存されたテーブルが、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有することを特徴とする請求項5記載の方法。
【請求項7】
複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数が、前記決定段階を遂行するときに針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定されることを特徴とする請求項6記載の方法。
【請求項8】
走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くすることを特徴とする請求項1記載の方法。
【請求項9】
走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くすることを特徴とする請求項1記載の方法。
【請求項10】
超音波イメージングにおける針の視覚化を向上させる装置であって、
患者の身体内の一部分又は組織のターゲットの深さに対応する走査深さを設定する設定モジュールと、
前記走査深さに基づいて針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数を自動的に決定する決定モジュールと、
を有する装置。
【請求項11】
更に、収集された針フレームについてエッジ強調フィルタリングを遂行する強調モジュールを有する請求項10記載の装置。
【請求項12】
前記強調モジュールは、針フレーム収集のための前記決定された針フレーム・ステアリング角度に整合するフィルタ・カーネルを用いることを特徴とする請求項11記載の装置。
【請求項13】
針フレーム収集のための前記針フレーム・ステアリング角度に整合する前記フィルタ・カーネルにおいて針の方向に沿って非ゼロの係数が定められていることを特徴とする請求項12記載の装置。
【請求項14】
前記決定モジュールは、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として、予め保存されたテーブルから、走査深さに対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を検索するように構成されていることを特徴とする請求項10記載の装置。
【請求項15】
前記予め保存されたテーブルは、複数の所定の深さ値と、該複数の所定の深さ値の各々にそれぞれ対応する複数の所定の針フレーム・ステアリング角度及び複数の所定の超音波動作周波数とを有することを特徴とする請求項14記載の装置。
【請求項16】
前記決定モジュールは更に、複数の所定の深さ値の内の、走査深さに等しい又はそれに最も近い1つの深さ値に対応する所定の針フレーム・ステアリング角度及び所定の超音波動作周波数を、針フレーム収集のための針フレーム・ステアリング角度及び超音波動作周波数として決定するように構成されていることを特徴とする請求項15記載の装置。
【請求項17】
走査深さが浅くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより小さくし且つ針フレーム収集のための超音波動作周波数をより高くすることを特徴とする請求項10記載の装置。
【請求項18】
走査深さが深くなればなるほど、針フレーム収集のための針フレーム・ステアリング角度をより大きくし且つ針フレーム収集のための超音波動作周波数をより低くすることを特徴とする請求項10記載の装置。
【請求項19】
更に、前記テーブルを保存するためのメモリを有している請求項14記載の装置。
【請求項20】
請求項10〜19のいずれか1項に記載の超音波イメージングにおける針の視覚化を向上させる装置を有する超音波イメージング・システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9A】
【図9B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9A】
【図9B】
【公開番号】特開2013−63256(P2013−63256A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−181520(P2012−181520)
【出願日】平成24年8月20日(2012.8.20)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2012−181520(P2012−181520)
【出願日】平成24年8月20日(2012.8.20)
【出願人】(390041542)ゼネラル・エレクトリック・カンパニイ (6,332)
【Fターム(参考)】
[ Back to top ]