
医療廃棄物滅菌装置用ボックス自動移載装置
【課題】医療廃棄物の病院内搬送から医療廃棄物物滅菌装置への投入までのプロセスを人手を介さずに自動化する。
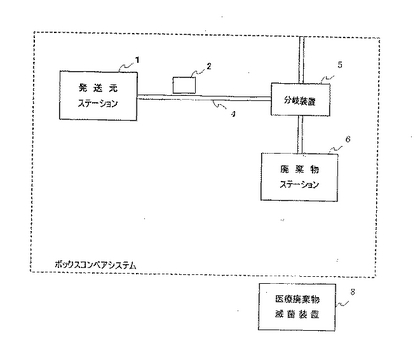
【解決手段】医療廃棄物入った袋の医療廃棄物滅菌装置への投入プロセスを人手を介さずに自動化する為に、医療廃棄物滅菌装置用ボックス自動移載装置7を設け、ボックスコンベアシステムの廃棄物ステーション6と医療廃棄物滅菌装置8を医療廃棄物滅菌装置用ボックス自動移載装置7により結合するようにする。
【解決手段】医療廃棄物入った袋の医療廃棄物滅菌装置への投入プロセスを人手を介さずに自動化する為に、医療廃棄物滅菌装置用ボックス自動移載装置7を設け、ボックスコンベアシステムの廃棄物ステーション6と医療廃棄物滅菌装置8を医療廃棄物滅菌装置用ボックス自動移載装置7により結合するようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、病院などの建物内の天井裏などに敷設したボックスコンベアシステムの1ステーションである廃棄物ステーションから医療廃棄物が格納されたボックスを受け取り、医療廃棄物を自動的に医療廃棄物滅菌装置に投げ入れることができる事ができる医療廃棄物滅菌装置用ボックス自動移載装置に関する。
【背景技術】
【0002】
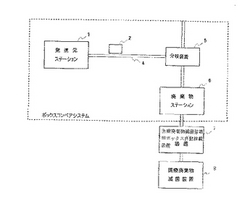
以下、図3により従来のボックスコンベアシステムを使用した場合の医療廃棄物の処理について説明する。
発送元ステーション1に停止している空のボックス2内に医療廃棄物の入った袋を置き、そのボックス2を廃棄物ステーション6に向かうように指示すると、ベルトコンベア4が動き出し、ボックス2は、ベルトコンベア4及び分岐装置5により搬送され廃棄物ステーション6に到着する。
【0003】
医療廃棄物滅菌装置8は、廃棄物ステーション6から離れた所に設置されていて、作業員が廃棄物ステーション6に到着したボックス2を手で持って、医療廃棄物滅菌装置8の所へ行き、医療廃棄物滅菌装置の蓋9を手動で開けた後、ボックス2内の医療廃棄物を医療廃棄物滅菌装置8に投げ入れていた。 この処理で、廃棄物ステーション6に到着したボックス2内の医療廃棄物を医療廃棄物滅菌装置8に自動移載する特許文献を調査しましたが、見当たりませんでした。
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来、ボックスコンベアシステムの廃棄物ステーション6と医療廃棄物滅菌装置8は、異なる場所に設置され、ボックス2に格納されている医療廃棄物を医療廃棄物滅菌装置8に入れる場合、人が療廃棄物が入ったボックス2を廃棄物ステーション6で受け取り、そのボックス2を医療廃棄物滅菌装置8のところまで手で持っていった後、手動で医療廃棄物滅菌装置の蓋9を開け、医療廃棄物を医療廃棄物滅菌装置8に投げ入れていた為、人の労力を必要とし、且つ、作業員は、医療廃棄物からの感染の危険があった。 本発明では、廃棄物ステーション6から医療廃棄物滅菌装置8までの医療廃棄物の搬送を無人化する事を課題とする。
【課題を解決するための手段】
【0005】
本発明の医療廃棄物滅菌装置用ボックス自動移載装置は、病院で使用される自動移載装置において、ボックスコンベアシステムの1ステーションである廃棄物ステーションから医療廃棄物が格納されたボックスを受け取り、ボックス内の医療廃棄物を自動的に且つ、確実に医療廃棄物滅菌装置に投げ入れることができる事を特徴とする。
【発明の効果】
【0006】
本発明の医療廃棄物滅菌装置用ボックス自動移載装置により、医療廃棄物の病院内の自動搬送の後の自動的且つ確実な医療廃棄物滅菌装置への移載が可能となり、その処理は、全自動なので、従来の様な医療廃棄物から作業員への病原菌の感染の危険性もなくなる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態として一実施例を図1、図2に基づいて説明する。
【0008】
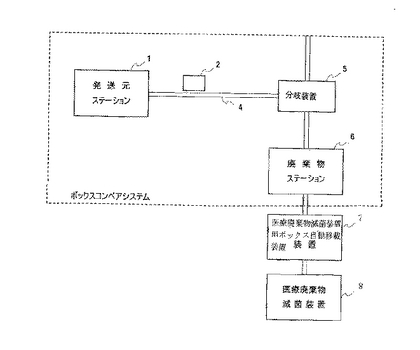
発送元ステーション1に停止している空のボックス2の中に医療廃棄物を置き、そのボックス2を廃棄物ステーション6に向かうように指示すると、ベルトコンベア4が動き出し、ボックス2は、分岐装置5を通過した後、廃棄物ステーション6を通過し、医療廃棄物滅菌装置用ボックス自動移載装置7の移載用ベルトコンベア10のところに達する。
【0009】
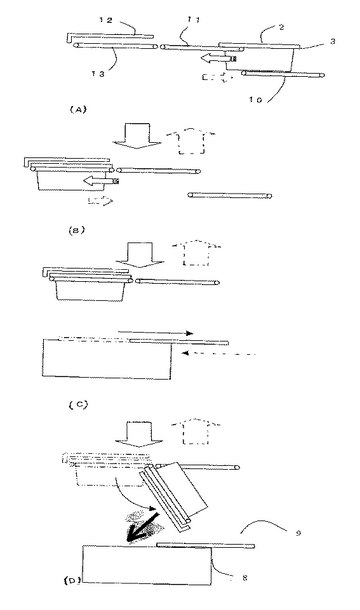
そして、医療廃棄物滅菌装置用ボックス自動移載装置7のガイドベルト11の上にボックス上部のヘリ3の裏面がのり、ガイドベルト11を図2に向かって左回りに回転させると、ボックス2は、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ下部ベルト13の方向に移動し始めて,図2の(A)の状態になる。
【0010】
そして、さらにボックス2は、移動し、グリッパ下部ベルト13の所に達し、グリッパ下部ベルト13を図2に向かって左回りに回転させると、図2の(B)の状態になる。
この状態になったらば、ガイドベルト11とグリッパ下部ベルト13は、停止する。
【0011】
その後、図2の(C)の状態で示すように、医療廃棄物滅菌装置の蓋9が開く。
【0012】
そして、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ上部板12とグリッパ下部ベルト13およびボックス2が150度回転する事により、図2の(D)の状態の様に医療廃棄物を医療廃棄物滅菌装置内に投げ入れる。
【0013】
その後、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ上部板12とグリッパ下部ベルト13が150度反対方向に回転する事により、図2の(C)の状態に戻る。
また、その時、医療廃棄物滅菌装置の蓋9が、閉まる。
【0014】
そして、ガイドベルト11とグリッパ下部ベルト13の上にボックスのヘリ3がのった状態で、ガイドベルト11とグリッパ下部ベルト13を図2に向かって右回りに回転させると、図2の(A)の状態になる。
【0015】
その後、移載用ベルトコンベア10を図2に向かって右回りに回転させることにより、空のボックス2は、医療廃棄物滅菌装置用ボックス自動移載装置7から出て、医療廃棄物滅菌装置用ボックス自動移載装置7の一連の動作は、終了する。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例を示すボックスコンベアシステムと医療廃棄物滅菌装置のブロック図
【図2】医療廃棄物滅菌装置用ボックス自動移載装置の一連の動作及びその状態を示した説明図(−実施例)
【図3】従来のボックスコンベアシステムと医療廃棄物滅菌装置のブロック図
【符号の説明】
【0017】
1 発送元ステーション
2 ボックス
3 ボックス上部のヘリ
4 ベルトコンベア
5 分岐装置
6 廃棄物ステーション
7 医療廃棄物滅菌装置用ボックス自動移載装置
8 医療廃棄物滅菌装置
9 医療廃棄物滅菌装置の蓋
10 移載用ベルトコンベア
11 ガイドベルト
12 グリッパ上部板
13 グリッパ下部ベルト
【技術分野】
【0001】
本発明は、病院などの建物内の天井裏などに敷設したボックスコンベアシステムの1ステーションである廃棄物ステーションから医療廃棄物が格納されたボックスを受け取り、医療廃棄物を自動的に医療廃棄物滅菌装置に投げ入れることができる事ができる医療廃棄物滅菌装置用ボックス自動移載装置に関する。
【背景技術】
【0002】
以下、図3により従来のボックスコンベアシステムを使用した場合の医療廃棄物の処理について説明する。
発送元ステーション1に停止している空のボックス2内に医療廃棄物の入った袋を置き、そのボックス2を廃棄物ステーション6に向かうように指示すると、ベルトコンベア4が動き出し、ボックス2は、ベルトコンベア4及び分岐装置5により搬送され廃棄物ステーション6に到着する。
【0003】
医療廃棄物滅菌装置8は、廃棄物ステーション6から離れた所に設置されていて、作業員が廃棄物ステーション6に到着したボックス2を手で持って、医療廃棄物滅菌装置8の所へ行き、医療廃棄物滅菌装置の蓋9を手動で開けた後、ボックス2内の医療廃棄物を医療廃棄物滅菌装置8に投げ入れていた。 この処理で、廃棄物ステーション6に到着したボックス2内の医療廃棄物を医療廃棄物滅菌装置8に自動移載する特許文献を調査しましたが、見当たりませんでした。
【発明の開示】
【発明が解決しようとする課題】
【0004】
従来、ボックスコンベアシステムの廃棄物ステーション6と医療廃棄物滅菌装置8は、異なる場所に設置され、ボックス2に格納されている医療廃棄物を医療廃棄物滅菌装置8に入れる場合、人が療廃棄物が入ったボックス2を廃棄物ステーション6で受け取り、そのボックス2を医療廃棄物滅菌装置8のところまで手で持っていった後、手動で医療廃棄物滅菌装置の蓋9を開け、医療廃棄物を医療廃棄物滅菌装置8に投げ入れていた為、人の労力を必要とし、且つ、作業員は、医療廃棄物からの感染の危険があった。 本発明では、廃棄物ステーション6から医療廃棄物滅菌装置8までの医療廃棄物の搬送を無人化する事を課題とする。
【課題を解決するための手段】
【0005】
本発明の医療廃棄物滅菌装置用ボックス自動移載装置は、病院で使用される自動移載装置において、ボックスコンベアシステムの1ステーションである廃棄物ステーションから医療廃棄物が格納されたボックスを受け取り、ボックス内の医療廃棄物を自動的に且つ、確実に医療廃棄物滅菌装置に投げ入れることができる事を特徴とする。
【発明の効果】
【0006】
本発明の医療廃棄物滅菌装置用ボックス自動移載装置により、医療廃棄物の病院内の自動搬送の後の自動的且つ確実な医療廃棄物滅菌装置への移載が可能となり、その処理は、全自動なので、従来の様な医療廃棄物から作業員への病原菌の感染の危険性もなくなる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の実施の形態として一実施例を図1、図2に基づいて説明する。
【0008】
発送元ステーション1に停止している空のボックス2の中に医療廃棄物を置き、そのボックス2を廃棄物ステーション6に向かうように指示すると、ベルトコンベア4が動き出し、ボックス2は、分岐装置5を通過した後、廃棄物ステーション6を通過し、医療廃棄物滅菌装置用ボックス自動移載装置7の移載用ベルトコンベア10のところに達する。
【0009】
そして、医療廃棄物滅菌装置用ボックス自動移載装置7のガイドベルト11の上にボックス上部のヘリ3の裏面がのり、ガイドベルト11を図2に向かって左回りに回転させると、ボックス2は、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ下部ベルト13の方向に移動し始めて,図2の(A)の状態になる。
【0010】
そして、さらにボックス2は、移動し、グリッパ下部ベルト13の所に達し、グリッパ下部ベルト13を図2に向かって左回りに回転させると、図2の(B)の状態になる。
この状態になったらば、ガイドベルト11とグリッパ下部ベルト13は、停止する。
【0011】
その後、図2の(C)の状態で示すように、医療廃棄物滅菌装置の蓋9が開く。
【0012】
そして、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ上部板12とグリッパ下部ベルト13およびボックス2が150度回転する事により、図2の(D)の状態の様に医療廃棄物を医療廃棄物滅菌装置内に投げ入れる。
【0013】
その後、医療廃棄物滅菌装置用ボックス自動移載装置7のグリッパ上部板12とグリッパ下部ベルト13が150度反対方向に回転する事により、図2の(C)の状態に戻る。
また、その時、医療廃棄物滅菌装置の蓋9が、閉まる。
【0014】
そして、ガイドベルト11とグリッパ下部ベルト13の上にボックスのヘリ3がのった状態で、ガイドベルト11とグリッパ下部ベルト13を図2に向かって右回りに回転させると、図2の(A)の状態になる。
【0015】
その後、移載用ベルトコンベア10を図2に向かって右回りに回転させることにより、空のボックス2は、医療廃棄物滅菌装置用ボックス自動移載装置7から出て、医療廃棄物滅菌装置用ボックス自動移載装置7の一連の動作は、終了する。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例を示すボックスコンベアシステムと医療廃棄物滅菌装置のブロック図
【図2】医療廃棄物滅菌装置用ボックス自動移載装置の一連の動作及びその状態を示した説明図(−実施例)
【図3】従来のボックスコンベアシステムと医療廃棄物滅菌装置のブロック図
【符号の説明】
【0017】
1 発送元ステーション
2 ボックス
3 ボックス上部のヘリ
4 ベルトコンベア
5 分岐装置
6 廃棄物ステーション
7 医療廃棄物滅菌装置用ボックス自動移載装置
8 医療廃棄物滅菌装置
9 医療廃棄物滅菌装置の蓋
10 移載用ベルトコンベア
11 ガイドベルト
12 グリッパ上部板
13 グリッパ下部ベルト
【特許請求の範囲】
【請求項1】
病院で使用される移載装置において、移載用ベルトコンベア10、ガイドベルト11、グリッパ上部板12、グリッパ下部ベルト13を取り付けた医療廃棄物滅菌装置用ボックス自動移載装置
【請求項2】
病院で使用される移載装置において、ボックス上部のヘリ3の裏面をガイドベルト11およびグリッパ下部ベルト13の上に接触させ、医療廃棄物滅菌装置8の真上まで運ぶ医療廃棄物滅菌装置用ボックス自動移載装置
【請求項1】
病院で使用される移載装置において、移載用ベルトコンベア10、ガイドベルト11、グリッパ上部板12、グリッパ下部ベルト13を取り付けた医療廃棄物滅菌装置用ボックス自動移載装置
【請求項2】
病院で使用される移載装置において、ボックス上部のヘリ3の裏面をガイドベルト11およびグリッパ下部ベルト13の上に接触させ、医療廃棄物滅菌装置8の真上まで運ぶ医療廃棄物滅菌装置用ボックス自動移載装置
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−131321(P2006−131321A)
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願番号】特願2004−320616(P2004−320616)
【出願日】平成16年11月4日(2004.11.4)
【出願人】(391059425)シーメンス株式会社 (5)
【Fターム(参考)】
【公開日】平成18年5月25日(2006.5.25)
【国際特許分類】
【出願日】平成16年11月4日(2004.11.4)
【出願人】(391059425)シーメンス株式会社 (5)
【Fターム(参考)】
[ Back to top ]