
医療技術機器、試験体、および患者テーブルの位置決め精度のチェック方法
【課題】レーザ座標表示系における医療技術機器患者テーブルの位置決め精度のチェックを簡素化する。
【解決手段】アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器において、患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有しビームを検出するための試験体が設けられ、試験体の位置が患者テーブルの位置と相関している。
【解決手段】アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器において、患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有しビームを検出するための試験体が設けられ、試験体の位置が患者テーブルの位置と相関している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器に関する。本発明はさらに、医療技術機器のアイソセンタに関して患者テーブルの位置決め精度をチェックする方法に関する。
【0002】
医療技術機器に対して相対的な患者の正しい位置決めは患者の治療にとってきわめて重要である。特に、粒子ビームの位置決め精度が散乱を使った従来の光子照射または陽子照射におけるよりも数倍良好な粒子放射線治療では、放射線治療機器のアイソセンタに被照射組織を精確に位置決めすることは根本的に重要である。その際、いかなる誤りも極力小さく抑えるために、患者テーブルの位置決め精度とその再現性とにきわめて厳しい条件が要求される。
【0003】
患者の正しい位置決めにとっての基本的前提条件は空間座標系の精確な決定である。代表的にはレーザ座標表示系は設置時に、そして年1回、セオドライトで測量される。レーザ座標表示系はふつう少なくとも3つの互いに直交した線状ファンビームを含み、ファンビームの交点がアイソセンタの場所を明示する。位置決め精度をチェックするために患者テーブル上に試験体、確定された位置に目印を有するいわゆるファントムが取付けられる。この試験体を利用して、レーザ座標表示系に対する位置で不正確さを確認して補正することができる。レーザ座標表示系に対する試験体の位置決めは一般に担当操作員によって目視で行われる。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、レーザ座標表示系における医療技術機器の患者テーブルの位置決め精度のチェックを簡素化することである。
【課題を解決するための手段】
【0005】
この課題は、本発明によれば、アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器において、患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有しビームを検出するための試験体が設けられ、試験体の位置が患者テーブルの位置と相関していることによって解決される。
【0006】
レーザビームは光電池列に向けられ、レーザ線または試験ビームの態様で光電池列と交差する1つのファンビームを形成するように制御されかつ移動される。試験ビームを照射される光電池が医療技術機器の制御装置に信号を提供し、この信号は、試験体の精確な位置座標および場合によっては方位に関するデータを得るためにコンピュータで評価される。
【0007】
ビーム源から放出されたビーム、特にレーザビームを、相並んだ光電池で構成された光電池列によって検出することは、医療技術機器の操作員による直接的目視検査を不要にする利点を有する。従って、相応の誤り源が除去され、相応に高分解能の光電池を使用する場合に座標系のチェック精度も高まる。それに加えて、光電池列によって取得された信号は医療技術機器の制御用に設けられた制御装置によって自動的に継続処理可能であり、これにより精度が改善され、安全性が高まる。それゆえ、従来のチェック法の自動化および客観化が達成される。
【0008】
好ましい最初の実施態様において、試験体は、患者テーブルとは別に患者テーブルの調整装置、例えばロボットアームを介してアイソセンタに位置決めされる特別な幾何学的物体である。アイソセンタに関する試験体の正しい座標が記憶され、患者テーブルは後に何時でも調整装置によってアイソセンタに対して相対的な規定された位置に走行することができる。代替的に、特別な試験体が患者テーブル上に取付けられ、これにより、試験体の座標と患者テーブルの座標との間に直接的な相関関係が実現される。他の実施態様において、試験体は患者テーブルの一部であり、患者テーブルのさまざまな位置に固着されまたは患者テーブルに一体化された複数の要素を含む。
【0009】
好ましくは、試験ビームのビーム広がりは、光電池列に対して相対的に、試験ビームが光電池列の光電池の小部分にのみ衝突するように設計されている。その際、信号、特に設定可能な閾値を上まわる信号は光電池の一部でのみ作成される。それゆえ、光電池列に沿った信号の移動(ずれ)を検出することが可能であり、この移動(ずれ)はアイソセンタからの試験体位置の偏差に関する情報を提供する。特に、試験体の最初の調整時に、個々の各光電池列に沿った信号位置に関するデータは零点位置として記憶され、試験体の位置決め精度の新たなチェック時に、新たに得られたデータは各光電池列内での信号の格納された零点位置と比較される。
【0010】
好ましい一実施態様によれば、互いに或る角度、特に直角を成す複数の光電池列が設けられている。それゆえ、試験体の位置は二次元または三次元で検出することができる。特に、試験体は光電池列が座標表示系の軸に実質的に沿って延びるように位置決めされている。座標表示系内での試験体の精確な位置を評価することは特に簡単である。
【0011】
他の好ましい一実施態様によれば、互いに平行に配置されかつ試験ビームのビーム方向において相互に離間した複数の光電池列が設けられている。この実施態様により、例えば2つの平行な対向する光電池列が試験ビームを照射される場合、アイソセンタからの試験体の移動(ずれ)だけでなく、座標表示系に関する試験体の回動(ねじれ)も検出することができる。
【0012】
光電池列の平行配置によって試験体の回動(ねじれ)を検出することは光電池列の大きさによって制限されており、大抵の場合数度の偏差のみが検出可能である。座標表示系の軸に対する一層大きな回動を示唆する他の角度位置をチェックするために、1平面に複数の光電池列が必要である。それゆえ、好ましい一実施態様によれば、複数の光電池列が仮想円周上に配置されている。複数の光電池列を円状または弧状に配置することによって、特別大きな角度値の偏差を検出することができる。
【0013】
有利には、試験体は患者テーブルに精確に結合するための結合要素を有する。試験体と患者テーブルとの繰返し可能な精確な結合によって、座標表示系内のテーブルの位置も規定されている。
【0014】
試験体は患者テーブルの特にロボットとして実施された調整装置の連結部に連結可能であると好ましい。特に、試験体は工具交換ユニットを介して調整装置に直接に連結可能である。アイソセンタに試験体を位置決めし、アイソセンタの座標を記憶した後、試験体は工具交換ユニットによって患者テーブルと交換され、テーブルはアイソセンタに関して規定された位置に走行することができる。
【0015】
課題は本発明によればさらに、医療技術機器のアイソセンタに関して座標表示系内で患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有する試験体によって解決される。試験体は有利には、板状台とこれに直角に配置された少なくとも1つの柱とを有する倒立したテーブルの形に構成され、台には互いに或る角度を成して配置された少なくとも2つの光電池列が設けられ、柱には他の1つの光電池列が設けられている。
【0016】
課題は本発明によればさらに、医療技術機器のアイソセンタに関して座標表示系内で患者テーブルの位置決め精度をチェックする方法において、1列の光電池で構成された光電池列を有する試験体が試験位置に移され、光電池列が座標表示系のビーム源から放出された試験ビームを照射され、光電池列によって取得された信号に依存してアイソセンタに対して相対的な試験体位置が求められることによって解決される。
【0017】
医療技術機器に関して挙げられた利点および好ましい実施態様は意味上試験体および方法に援用することができる。
【0018】
有利には、光電池列の信号の位置は、座標表示系内で試験体の調整時に規定された零点位置と比較される。それゆえ、試験体の移動(ずれ)および場合によっては回動(ねじれ)が検出される。
【0019】
試験体もしくは患者テーブルの位置決め精度の三次元チェックを可能にするために、試験体は好ましくは複数の方向から、特に3つの方向から、座標表示系に対して平行に照射される。
【0020】
好ましい一実施態様によれば、アイソセンタに対して相対的な位置を求めるために試験体が動かされ、光電池列によって記録された信号が評価される。並進運動または回転運動によって、光電池列上の信号の零点位置が達成されるまで、正しい位置からの偏差が補償される。
【0021】
試験体の運動はさらに、試験体の方位に関する情報を得るのに利用することができる。特に、座標方向ごとに単に1つの光電池列が設けられている実施態様において、零点位置からの信号の偏差は試験体の並進運動も回動も示唆することがある。両事例のどちらが存在するのかを決定するために、試験体は1平面において、仮定されたアイソセンタの周りで例えば90°回され、その位置が新たにチェックされる。今や個々の光電池列のそれまでの位置に対する信号移動が検出可能であると、この平面における試験体の支点はアイソセンタと同じはでない。
【0022】
以下、本発明の実施例が図面に基づいて説明される。
【発明を実施するための最良の形態】
【0023】
相対応する部品およびパラメータはすべての図で同じ符号が付けてある。
【0024】
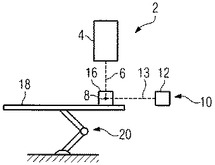
図1に略示された医療技術機器2は粒子放射器4、例えば陽子放射器または重イオン放射器を含み、動作時にこの放射器が粒子ビーム6を放出し、この粒子ビーム6は放射線治療の実行時にアイソセンタ8において図示しない患者の被照射組織に衝突する。
【0025】
医療技術機器2は光学座標表示系10を有し、この座標表示系10はビーム源12としてレーザ放射器を含む。レーザ放射器12から放出されたレーザビーム13のビームを検出するために、ここには図示しない光電池列14が試験体16上に取付けて設けられている(図2乃至図6参照)。図1には単一のビーム源12だけが概略的に示されており、このビーム源12は座標表示系10の一方向における試験体16の位置を決定する。実際には、座標系の軸を描く少なくとも3つのレーザ放射器12が設けられている。
【0026】
試験体16は座標表示系10内で医療技術機器2の患者テーブル18の位置決め精度をチェックするのに役立つ。この実施例において試験体16は脱離可能に患者テーブル18に結合された特別な物体であり、この物体は間接的にテーブル18の調整装置20を介して移送することができる。患者テーブル18上での試験体16の位置決めはきわめて精確で再現可能であり、座標表示系10内で試験体16の位置と患者テーブル18の位置との間の一義的な相関関係が保証されている。
【0027】
すべてのレーザ放射器12と試験体16とは医療技術機器2のここに図示しない制御装置にデータ技術的に接続されている。ビーム検出によって得られるデータが制御装置内で評価され、アイソセンタ8に対して試験体16の位置偏差が存在するか否かが求められる。偏差が存在する場合、この実施例において偏差は、制御装置が調整装置20を介してテーブル18の位置、従って試験体16の位置を相応に変えることによって補正される。
【0028】
試験体16は複数の要素で構成することもでき、これらの要素は相互に離間して患者テーブル18上に取付けられ、またはテーブル18の一体な構成要素である。代替的に、試験体16は工具交換ユニット、いわゆるツールチェンジャを介して調整装置20に直接結合しておくことができる。その場合、アイソセンタ8に対して相対的な位置決め精度のチェック後、ツールチェンジャによって試験体16はテーブル18と取り替えられ、テーブル18はアイソセンタ8に対して所望の規定された位置に繰返し移送することができる。
【0029】
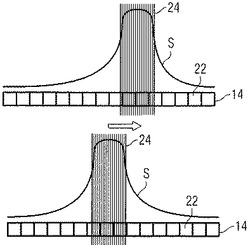
図2には試験体16の1つの光電池列14が示されている。光電池列14は幾何学的に1列に配置された複数の光電池22で構成されている。光電池22として例えばCCD(電荷結合素子)セルが使用される。その他のあらゆる感光センサが同様に適している。
【0030】
図2では1つの光電池列14に付加して、ビーム源12のレーザビーム13で2つの異なる照射が行われた際に光電池列14から提供された電気信号Sが示されている。レーザビーム13はファンビームを形成し、このファンビームはレーザ線の態様で試験ビーム24として光電池列14と交差する。ビーム広がりA(図3)は、試験ビーム24が光電池列14の光電池22の小部分にのみ衝突するように設計されている。
【0031】
第1入射位置(図2の下側に図示されている)から第2入射位置への試験ビーム24の移動は矢印で明示されている。試験ビーム24によって直接照射される光電池22において高い信号強さが作成されると、試験ビーム24の中心からの距離の増加に伴って信号Sが減少する。いずれの光電池22が試験ビーム24を照射されるのかの評価によって、試験体16に対して相対的な試験ビーム24の位置が求められる。特に設定可能な閾値を上まわる信号値を出力する光電池のみが、試験ビーム24を照射されたと評価されると好ましい。
【0032】
感光フォトダイオードとしての光電池22内に、照射時に、衝突する光の強度に比例する電荷が発生する。信号処理の第1様式では、光電池22によって検出された光の強度が有利には設定可能な閾値を上まわるか否かのみが検出される。次に試験ビーム24の入射個所は光電池22の座標によって、もしくは複数の光電池列14が照射される場合、当該光電池列14の平均座標によって規定されている。
【0033】
信号処理の代替方法によれば、閾値を上まわることだけでなく、照射された各光電池22において、一層細かな分解能で、特にディジタル目盛で、信号Sの強さも検出される。こうして、個々の光電池22の位置分解能、すなわち光電池列14の広がり方向における代表的には正方形の光電池22の次元を越える精度で試験ビーム24の入射中心は決定可能である。
【0034】
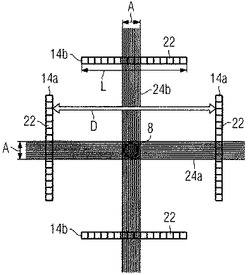
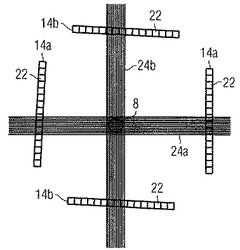
二次元平面において試験体16の位置および方位に関する情報がどのように精確に得られるのかが図3、図4から明らかとなる。図3では2つの光電池列14aが互いに平行に配置されており、同種の光電池列14a間の距離は符号Dとされている。付加的に2つの他の光電池列14bがやはり互いに平行に配置されている。これらの光電池列14bは光電池列14aに対して直角に配置されており、合計4つの光電池列14a、14bは仮想方形、特に正方形の辺に配置されている。この正方形の中心にアイソセンタ8があり、粒子ビーム6で処理されるべき患者組織はアイソセンタ8に位置決めすることができる。
【0035】
各対の光電池列14a、14bに照射される試験ビーム24a、24bは縦長に延びる方形横断面を有し、レーザ線の態様で光電池列14a、14bの平面に衝突する。図3に示されている試験ビーム24a、24bは付属の光電池列14a、14bとそれぞれ厳密に直角に交差する。アイソセンタ8は両試験ビーム24a、24bの交点にある。各試験ビーム24a、24bは光電池列14a、14bの長さLの比較的小さな部分にわたってのみ、図示実施例では長さLの1/4未満にわたって、付属の光電池列14a、14bと交差する。
【0036】
図4はやはり光電池列14a、14bを図3による配置で示す。試験体16、従って光電池列14a、14bの方位だけは、図3を基に説明した事例と相違している。図4によれば、両対の光電池列14a、14bは各試験ビーム24a、24bに対して直角に向いてない。
【0037】
図4によって、座標表示系10は相応の試験ビーム24a、24bに対して相対的な試験体16もしくは光電池列14a、14bの移動(ずれ)だけでなく、回動(ねじれ)を定量的に検出することにも適していることが具体的に示されている。互いに平行な光電池列14aの間の距離Dが大きければ大きいほど、光学測定系10の角度分解能は一層大きくなる。
【0038】
患者の照射開始前に、試験ビーム24a、24bと光電池列14a、14bとの間に図3に示す空間的相関関係を達成するためにレーザ座標系10の調整を行わねばならない。信号Sの位置は個々の光電池列14a、14bを介して、最初の調整時に記憶された零点位置と比較される。例えば図4から明らかとなる光電池列14a、14bの正しい位置からの偏差および向きは、得られた信号Sの位置と零点位置とを比較するとき自動的に検知され表示される。試験体16が各光電池列14a、14bの読取られた信号Sに依存して調整装置20を介して相応に並進または回転運動することによって、これらの偏差は医療技術機器2の制御装置によっても補正される。
【0039】
個々の光電池列14a、14bの代わりに、ビーム検出のために光電池22のアレイを設けておくこともできる。光電池列14を円状または弧状に配置することも可能であり、これにより角度選択性の向上が達成可能である。
【0040】
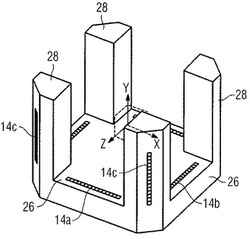
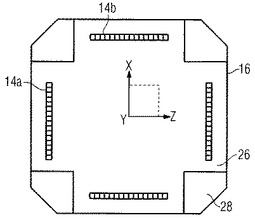
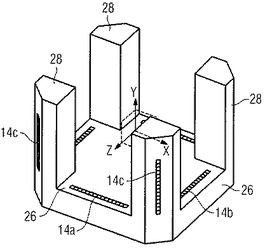
座標表示系10のX軸、Y軸、Z軸に関して試験体16上での光電池列14a、14bの配置が図5、図6に示してある。好ましいこの構成において試験体16は倒立した(逆さにした)テーブルの形に構成されている。試験体16は台26を有し、この台26は実質的に座標表示系10の水平なX‐Z平面にある。この実施例において試験体16は台26の下面にここでは詳しく図示しない結合要素を有し、この結合要素を介してテーブル18との極めて精確な結合が実現可能である。
【0041】
垂直なY軸に沿った試験体16の位置偏差を検出するためにこの実施例では台26に対して垂直に4つの柱28が設けられている。各柱28に1つの光電池列14cがY軸と平行に配置されている。光電池列14cは、台26と実質的に平行な平面にあるここに図示しない試験ビームと交差する。試験体16の位置決め精度をチェックするためには2つの柱28でも十分であろう。これらの柱28上には2つの光電池列14cが、両光電池列14cが片側から試験ビームと交差できるように配置されている。しかしこの実施例では、X‐Z平面において4つのすべての側から位置決め精度をチェックできるように4つの柱28が設けられている。
【0042】
少なくとも2つの光電池列14cがY軸と平行に配置され、有利には対称に延び、かつアイソセンタ8から同じ距離(+X、−X)を有することによって、アイソセンタ8内で試験体16もしくは患者テーブル18の回転の他に横揺れと傾動、すなわちZ軸およびX軸の周りでの回転もチェックすることができる。
【0043】
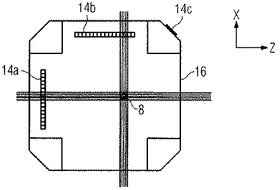
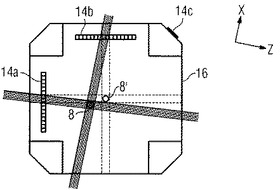
平行な光電池列対の代わりに、それぞれ単に1つの光電池列14a、14b、14cを座標表示系10の軸に対して平行に設けておくことができる。この変更実施形態によって、例えば図7aに示したように、特に試験体16の移動(ずれ)を検出することができる。
【0044】
各方向に単に1つの光電池列14a、14b、14cがある場合、試験体16の回動は自動的に検知することができない。というのは、光電池列14a、14b上での信号Sの位置変化は試験体16の移動(ずれ)も回動(ねじれ)も示唆することがあるからである。さらに、図7bに示すように両光電池列14a、14b上の信号Sの位置が零点位置と一致するとしても、試験体16は回動していることがある。回動が存在するか否かを決定するために、試験体16は、例えばX‐Z平面において支点8'の周りで時計回りに90°回される。支点8'は、光電池列14a、14bに垂直でありかつ光電池列14a、14bと零点位置で交差する2つの直線の交点である。それゆえ、支点8'にアイソセンタ8があると推測される。
【0045】
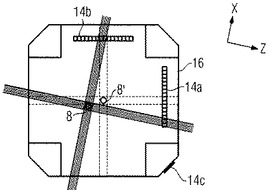
時計回りに90°回転後の試験体16の向きが図7cに示してある。光電池列14a、14b上での信号Sの位置の新たなチェックはX軸に沿った信号Sの移動を生じる。これは、試験体16の支点8'がX‐Z平面においてアイソセンタ8と同じでないことを意味する。時計回りでのさらなる90°回転はやはりZ軸に沿った信号Sの移動をやはり生じるであろう。その際に得られたデータを用いてアイソセンタ8の実際の位置を決定することができ、X‐Z平面における試験体16の回動は制御装置によって直接補正される。
【図面の簡単な説明】
【0046】
【図1】光学座標表示系と試験体とを有する医療技術機器を示す概略図
【図2】図1による試験体の1つの光電池列とこれで記録された信号の例示的推移とを示す図
【図3】座標表示系の2つの試験ビームに関して図1による試験体の複数の光電池列の第1方位を示す図
【図4】座標表示系の2つの試験ビームに関して図1による試験体の複数の光電池列の第2方位を示す図
【図5】試験体の平面図
【図6】図5による試験体の斜視図
【図7a】座標表示系に対して第1の向きにおける他の試験体の平面図
【図7b】座標表示系に対して第2の向きにおける他の試験体の平面図
【図7c】座標表示系に対して第3の向きにおける他の試験体の平面図
【符号の説明】
【0047】
2 医療技術機器
4 粒子放射器
6 粒子ビーム
8 アイソセンタ
10 座標表示系
12 ビーム源
13 レーザビーム
14 光電池列
16 試験体
18 患者テーブル
20 調整装置
22 光電池
24 試験ビーム
26 台
28 柱
A ビーム広がり
D 距離
L 長さ
S 信号
【技術分野】
【0001】
本発明は、アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器に関する。本発明はさらに、医療技術機器のアイソセンタに関して患者テーブルの位置決め精度をチェックする方法に関する。
【0002】
医療技術機器に対して相対的な患者の正しい位置決めは患者の治療にとってきわめて重要である。特に、粒子ビームの位置決め精度が散乱を使った従来の光子照射または陽子照射におけるよりも数倍良好な粒子放射線治療では、放射線治療機器のアイソセンタに被照射組織を精確に位置決めすることは根本的に重要である。その際、いかなる誤りも極力小さく抑えるために、患者テーブルの位置決め精度とその再現性とにきわめて厳しい条件が要求される。
【0003】
患者の正しい位置決めにとっての基本的前提条件は空間座標系の精確な決定である。代表的にはレーザ座標表示系は設置時に、そして年1回、セオドライトで測量される。レーザ座標表示系はふつう少なくとも3つの互いに直交した線状ファンビームを含み、ファンビームの交点がアイソセンタの場所を明示する。位置決め精度をチェックするために患者テーブル上に試験体、確定された位置に目印を有するいわゆるファントムが取付けられる。この試験体を利用して、レーザ座標表示系に対する位置で不正確さを確認して補正することができる。レーザ座標表示系に対する試験体の位置決めは一般に担当操作員によって目視で行われる。
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の課題は、レーザ座標表示系における医療技術機器の患者テーブルの位置決め精度のチェックを簡素化することである。
【課題を解決するための手段】
【0005】
この課題は、本発明によれば、アイソセンタに位置決め可能な患者テーブルと光学座標表示系とを備え、この座標表示系が、試験ビームを放出するために設けられた少なくとも1つのビーム源、特にレーザ放射器を有する医療技術機器、特に放射線治療機器において、患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有しビームを検出するための試験体が設けられ、試験体の位置が患者テーブルの位置と相関していることによって解決される。
【0006】
レーザビームは光電池列に向けられ、レーザ線または試験ビームの態様で光電池列と交差する1つのファンビームを形成するように制御されかつ移動される。試験ビームを照射される光電池が医療技術機器の制御装置に信号を提供し、この信号は、試験体の精確な位置座標および場合によっては方位に関するデータを得るためにコンピュータで評価される。
【0007】
ビーム源から放出されたビーム、特にレーザビームを、相並んだ光電池で構成された光電池列によって検出することは、医療技術機器の操作員による直接的目視検査を不要にする利点を有する。従って、相応の誤り源が除去され、相応に高分解能の光電池を使用する場合に座標系のチェック精度も高まる。それに加えて、光電池列によって取得された信号は医療技術機器の制御用に設けられた制御装置によって自動的に継続処理可能であり、これにより精度が改善され、安全性が高まる。それゆえ、従来のチェック法の自動化および客観化が達成される。
【0008】
好ましい最初の実施態様において、試験体は、患者テーブルとは別に患者テーブルの調整装置、例えばロボットアームを介してアイソセンタに位置決めされる特別な幾何学的物体である。アイソセンタに関する試験体の正しい座標が記憶され、患者テーブルは後に何時でも調整装置によってアイソセンタに対して相対的な規定された位置に走行することができる。代替的に、特別な試験体が患者テーブル上に取付けられ、これにより、試験体の座標と患者テーブルの座標との間に直接的な相関関係が実現される。他の実施態様において、試験体は患者テーブルの一部であり、患者テーブルのさまざまな位置に固着されまたは患者テーブルに一体化された複数の要素を含む。
【0009】
好ましくは、試験ビームのビーム広がりは、光電池列に対して相対的に、試験ビームが光電池列の光電池の小部分にのみ衝突するように設計されている。その際、信号、特に設定可能な閾値を上まわる信号は光電池の一部でのみ作成される。それゆえ、光電池列に沿った信号の移動(ずれ)を検出することが可能であり、この移動(ずれ)はアイソセンタからの試験体位置の偏差に関する情報を提供する。特に、試験体の最初の調整時に、個々の各光電池列に沿った信号位置に関するデータは零点位置として記憶され、試験体の位置決め精度の新たなチェック時に、新たに得られたデータは各光電池列内での信号の格納された零点位置と比較される。
【0010】
好ましい一実施態様によれば、互いに或る角度、特に直角を成す複数の光電池列が設けられている。それゆえ、試験体の位置は二次元または三次元で検出することができる。特に、試験体は光電池列が座標表示系の軸に実質的に沿って延びるように位置決めされている。座標表示系内での試験体の精確な位置を評価することは特に簡単である。
【0011】
他の好ましい一実施態様によれば、互いに平行に配置されかつ試験ビームのビーム方向において相互に離間した複数の光電池列が設けられている。この実施態様により、例えば2つの平行な対向する光電池列が試験ビームを照射される場合、アイソセンタからの試験体の移動(ずれ)だけでなく、座標表示系に関する試験体の回動(ねじれ)も検出することができる。
【0012】
光電池列の平行配置によって試験体の回動(ねじれ)を検出することは光電池列の大きさによって制限されており、大抵の場合数度の偏差のみが検出可能である。座標表示系の軸に対する一層大きな回動を示唆する他の角度位置をチェックするために、1平面に複数の光電池列が必要である。それゆえ、好ましい一実施態様によれば、複数の光電池列が仮想円周上に配置されている。複数の光電池列を円状または弧状に配置することによって、特別大きな角度値の偏差を検出することができる。
【0013】
有利には、試験体は患者テーブルに精確に結合するための結合要素を有する。試験体と患者テーブルとの繰返し可能な精確な結合によって、座標表示系内のテーブルの位置も規定されている。
【0014】
試験体は患者テーブルの特にロボットとして実施された調整装置の連結部に連結可能であると好ましい。特に、試験体は工具交換ユニットを介して調整装置に直接に連結可能である。アイソセンタに試験体を位置決めし、アイソセンタの座標を記憶した後、試験体は工具交換ユニットによって患者テーブルと交換され、テーブルはアイソセンタに関して規定された位置に走行することができる。
【0015】
課題は本発明によればさらに、医療技術機器のアイソセンタに関して座標表示系内で患者テーブルの位置決め精度をチェックするために、1列の光電池で構成された少なくとも1つの光電池列を有する試験体によって解決される。試験体は有利には、板状台とこれに直角に配置された少なくとも1つの柱とを有する倒立したテーブルの形に構成され、台には互いに或る角度を成して配置された少なくとも2つの光電池列が設けられ、柱には他の1つの光電池列が設けられている。
【0016】
課題は本発明によればさらに、医療技術機器のアイソセンタに関して座標表示系内で患者テーブルの位置決め精度をチェックする方法において、1列の光電池で構成された光電池列を有する試験体が試験位置に移され、光電池列が座標表示系のビーム源から放出された試験ビームを照射され、光電池列によって取得された信号に依存してアイソセンタに対して相対的な試験体位置が求められることによって解決される。
【0017】
医療技術機器に関して挙げられた利点および好ましい実施態様は意味上試験体および方法に援用することができる。
【0018】
有利には、光電池列の信号の位置は、座標表示系内で試験体の調整時に規定された零点位置と比較される。それゆえ、試験体の移動(ずれ)および場合によっては回動(ねじれ)が検出される。
【0019】
試験体もしくは患者テーブルの位置決め精度の三次元チェックを可能にするために、試験体は好ましくは複数の方向から、特に3つの方向から、座標表示系に対して平行に照射される。
【0020】
好ましい一実施態様によれば、アイソセンタに対して相対的な位置を求めるために試験体が動かされ、光電池列によって記録された信号が評価される。並進運動または回転運動によって、光電池列上の信号の零点位置が達成されるまで、正しい位置からの偏差が補償される。
【0021】
試験体の運動はさらに、試験体の方位に関する情報を得るのに利用することができる。特に、座標方向ごとに単に1つの光電池列が設けられている実施態様において、零点位置からの信号の偏差は試験体の並進運動も回動も示唆することがある。両事例のどちらが存在するのかを決定するために、試験体は1平面において、仮定されたアイソセンタの周りで例えば90°回され、その位置が新たにチェックされる。今や個々の光電池列のそれまでの位置に対する信号移動が検出可能であると、この平面における試験体の支点はアイソセンタと同じはでない。
【0022】
以下、本発明の実施例が図面に基づいて説明される。
【発明を実施するための最良の形態】
【0023】
相対応する部品およびパラメータはすべての図で同じ符号が付けてある。
【0024】
図1に略示された医療技術機器2は粒子放射器4、例えば陽子放射器または重イオン放射器を含み、動作時にこの放射器が粒子ビーム6を放出し、この粒子ビーム6は放射線治療の実行時にアイソセンタ8において図示しない患者の被照射組織に衝突する。
【0025】
医療技術機器2は光学座標表示系10を有し、この座標表示系10はビーム源12としてレーザ放射器を含む。レーザ放射器12から放出されたレーザビーム13のビームを検出するために、ここには図示しない光電池列14が試験体16上に取付けて設けられている(図2乃至図6参照)。図1には単一のビーム源12だけが概略的に示されており、このビーム源12は座標表示系10の一方向における試験体16の位置を決定する。実際には、座標系の軸を描く少なくとも3つのレーザ放射器12が設けられている。
【0026】
試験体16は座標表示系10内で医療技術機器2の患者テーブル18の位置決め精度をチェックするのに役立つ。この実施例において試験体16は脱離可能に患者テーブル18に結合された特別な物体であり、この物体は間接的にテーブル18の調整装置20を介して移送することができる。患者テーブル18上での試験体16の位置決めはきわめて精確で再現可能であり、座標表示系10内で試験体16の位置と患者テーブル18の位置との間の一義的な相関関係が保証されている。
【0027】
すべてのレーザ放射器12と試験体16とは医療技術機器2のここに図示しない制御装置にデータ技術的に接続されている。ビーム検出によって得られるデータが制御装置内で評価され、アイソセンタ8に対して試験体16の位置偏差が存在するか否かが求められる。偏差が存在する場合、この実施例において偏差は、制御装置が調整装置20を介してテーブル18の位置、従って試験体16の位置を相応に変えることによって補正される。
【0028】
試験体16は複数の要素で構成することもでき、これらの要素は相互に離間して患者テーブル18上に取付けられ、またはテーブル18の一体な構成要素である。代替的に、試験体16は工具交換ユニット、いわゆるツールチェンジャを介して調整装置20に直接結合しておくことができる。その場合、アイソセンタ8に対して相対的な位置決め精度のチェック後、ツールチェンジャによって試験体16はテーブル18と取り替えられ、テーブル18はアイソセンタ8に対して所望の規定された位置に繰返し移送することができる。
【0029】
図2には試験体16の1つの光電池列14が示されている。光電池列14は幾何学的に1列に配置された複数の光電池22で構成されている。光電池22として例えばCCD(電荷結合素子)セルが使用される。その他のあらゆる感光センサが同様に適している。
【0030】
図2では1つの光電池列14に付加して、ビーム源12のレーザビーム13で2つの異なる照射が行われた際に光電池列14から提供された電気信号Sが示されている。レーザビーム13はファンビームを形成し、このファンビームはレーザ線の態様で試験ビーム24として光電池列14と交差する。ビーム広がりA(図3)は、試験ビーム24が光電池列14の光電池22の小部分にのみ衝突するように設計されている。
【0031】
第1入射位置(図2の下側に図示されている)から第2入射位置への試験ビーム24の移動は矢印で明示されている。試験ビーム24によって直接照射される光電池22において高い信号強さが作成されると、試験ビーム24の中心からの距離の増加に伴って信号Sが減少する。いずれの光電池22が試験ビーム24を照射されるのかの評価によって、試験体16に対して相対的な試験ビーム24の位置が求められる。特に設定可能な閾値を上まわる信号値を出力する光電池のみが、試験ビーム24を照射されたと評価されると好ましい。
【0032】
感光フォトダイオードとしての光電池22内に、照射時に、衝突する光の強度に比例する電荷が発生する。信号処理の第1様式では、光電池22によって検出された光の強度が有利には設定可能な閾値を上まわるか否かのみが検出される。次に試験ビーム24の入射個所は光電池22の座標によって、もしくは複数の光電池列14が照射される場合、当該光電池列14の平均座標によって規定されている。
【0033】
信号処理の代替方法によれば、閾値を上まわることだけでなく、照射された各光電池22において、一層細かな分解能で、特にディジタル目盛で、信号Sの強さも検出される。こうして、個々の光電池22の位置分解能、すなわち光電池列14の広がり方向における代表的には正方形の光電池22の次元を越える精度で試験ビーム24の入射中心は決定可能である。
【0034】
二次元平面において試験体16の位置および方位に関する情報がどのように精確に得られるのかが図3、図4から明らかとなる。図3では2つの光電池列14aが互いに平行に配置されており、同種の光電池列14a間の距離は符号Dとされている。付加的に2つの他の光電池列14bがやはり互いに平行に配置されている。これらの光電池列14bは光電池列14aに対して直角に配置されており、合計4つの光電池列14a、14bは仮想方形、特に正方形の辺に配置されている。この正方形の中心にアイソセンタ8があり、粒子ビーム6で処理されるべき患者組織はアイソセンタ8に位置決めすることができる。
【0035】
各対の光電池列14a、14bに照射される試験ビーム24a、24bは縦長に延びる方形横断面を有し、レーザ線の態様で光電池列14a、14bの平面に衝突する。図3に示されている試験ビーム24a、24bは付属の光電池列14a、14bとそれぞれ厳密に直角に交差する。アイソセンタ8は両試験ビーム24a、24bの交点にある。各試験ビーム24a、24bは光電池列14a、14bの長さLの比較的小さな部分にわたってのみ、図示実施例では長さLの1/4未満にわたって、付属の光電池列14a、14bと交差する。
【0036】
図4はやはり光電池列14a、14bを図3による配置で示す。試験体16、従って光電池列14a、14bの方位だけは、図3を基に説明した事例と相違している。図4によれば、両対の光電池列14a、14bは各試験ビーム24a、24bに対して直角に向いてない。
【0037】
図4によって、座標表示系10は相応の試験ビーム24a、24bに対して相対的な試験体16もしくは光電池列14a、14bの移動(ずれ)だけでなく、回動(ねじれ)を定量的に検出することにも適していることが具体的に示されている。互いに平行な光電池列14aの間の距離Dが大きければ大きいほど、光学測定系10の角度分解能は一層大きくなる。
【0038】
患者の照射開始前に、試験ビーム24a、24bと光電池列14a、14bとの間に図3に示す空間的相関関係を達成するためにレーザ座標系10の調整を行わねばならない。信号Sの位置は個々の光電池列14a、14bを介して、最初の調整時に記憶された零点位置と比較される。例えば図4から明らかとなる光電池列14a、14bの正しい位置からの偏差および向きは、得られた信号Sの位置と零点位置とを比較するとき自動的に検知され表示される。試験体16が各光電池列14a、14bの読取られた信号Sに依存して調整装置20を介して相応に並進または回転運動することによって、これらの偏差は医療技術機器2の制御装置によっても補正される。
【0039】
個々の光電池列14a、14bの代わりに、ビーム検出のために光電池22のアレイを設けておくこともできる。光電池列14を円状または弧状に配置することも可能であり、これにより角度選択性の向上が達成可能である。
【0040】
座標表示系10のX軸、Y軸、Z軸に関して試験体16上での光電池列14a、14bの配置が図5、図6に示してある。好ましいこの構成において試験体16は倒立した(逆さにした)テーブルの形に構成されている。試験体16は台26を有し、この台26は実質的に座標表示系10の水平なX‐Z平面にある。この実施例において試験体16は台26の下面にここでは詳しく図示しない結合要素を有し、この結合要素を介してテーブル18との極めて精確な結合が実現可能である。
【0041】
垂直なY軸に沿った試験体16の位置偏差を検出するためにこの実施例では台26に対して垂直に4つの柱28が設けられている。各柱28に1つの光電池列14cがY軸と平行に配置されている。光電池列14cは、台26と実質的に平行な平面にあるここに図示しない試験ビームと交差する。試験体16の位置決め精度をチェックするためには2つの柱28でも十分であろう。これらの柱28上には2つの光電池列14cが、両光電池列14cが片側から試験ビームと交差できるように配置されている。しかしこの実施例では、X‐Z平面において4つのすべての側から位置決め精度をチェックできるように4つの柱28が設けられている。
【0042】
少なくとも2つの光電池列14cがY軸と平行に配置され、有利には対称に延び、かつアイソセンタ8から同じ距離(+X、−X)を有することによって、アイソセンタ8内で試験体16もしくは患者テーブル18の回転の他に横揺れと傾動、すなわちZ軸およびX軸の周りでの回転もチェックすることができる。
【0043】
平行な光電池列対の代わりに、それぞれ単に1つの光電池列14a、14b、14cを座標表示系10の軸に対して平行に設けておくことができる。この変更実施形態によって、例えば図7aに示したように、特に試験体16の移動(ずれ)を検出することができる。
【0044】
各方向に単に1つの光電池列14a、14b、14cがある場合、試験体16の回動は自動的に検知することができない。というのは、光電池列14a、14b上での信号Sの位置変化は試験体16の移動(ずれ)も回動(ねじれ)も示唆することがあるからである。さらに、図7bに示すように両光電池列14a、14b上の信号Sの位置が零点位置と一致するとしても、試験体16は回動していることがある。回動が存在するか否かを決定するために、試験体16は、例えばX‐Z平面において支点8'の周りで時計回りに90°回される。支点8'は、光電池列14a、14bに垂直でありかつ光電池列14a、14bと零点位置で交差する2つの直線の交点である。それゆえ、支点8'にアイソセンタ8があると推測される。
【0045】
時計回りに90°回転後の試験体16の向きが図7cに示してある。光電池列14a、14b上での信号Sの位置の新たなチェックはX軸に沿った信号Sの移動を生じる。これは、試験体16の支点8'がX‐Z平面においてアイソセンタ8と同じでないことを意味する。時計回りでのさらなる90°回転はやはりZ軸に沿った信号Sの移動をやはり生じるであろう。その際に得られたデータを用いてアイソセンタ8の実際の位置を決定することができ、X‐Z平面における試験体16の回動は制御装置によって直接補正される。
【図面の簡単な説明】
【0046】
【図1】光学座標表示系と試験体とを有する医療技術機器を示す概略図
【図2】図1による試験体の1つの光電池列とこれで記録された信号の例示的推移とを示す図
【図3】座標表示系の2つの試験ビームに関して図1による試験体の複数の光電池列の第1方位を示す図
【図4】座標表示系の2つの試験ビームに関して図1による試験体の複数の光電池列の第2方位を示す図
【図5】試験体の平面図
【図6】図5による試験体の斜視図
【図7a】座標表示系に対して第1の向きにおける他の試験体の平面図
【図7b】座標表示系に対して第2の向きにおける他の試験体の平面図
【図7c】座標表示系に対して第3の向きにおける他の試験体の平面図
【符号の説明】
【0047】
2 医療技術機器
4 粒子放射器
6 粒子ビーム
8 アイソセンタ
10 座標表示系
12 ビーム源
13 レーザビーム
14 光電池列
16 試験体
18 患者テーブル
20 調整装置
22 光電池
24 試験ビーム
26 台
28 柱
A ビーム広がり
D 距離
L 長さ
S 信号
【特許請求の範囲】
【請求項1】
アイソセンタ(8)に位置決め可能な患者テーブル(18)と光学座標表示系(10)とを備え、この座標表示系(10)が、試験ビーム(24)を放出するために設けられた少なくとも1つのビーム源(12)を有する医療技術機器(2)において、患者テーブル(18)の位置決め精度をチェックするために、1列の光電池(22)で構成された少なくとも1つの光電池列(14)を有しビームを検出するための試験体(16)が設けられ、試験体の位置が患者テーブル(18)の位置と相関していることを特徴とする医療技術機器。
【請求項2】
試験ビーム(24)のビーム広がり(A)は、光電池列(14)に対して相対的に、試験ビーム(24)が光電池列(14)の光電池(22)の小部分にのみ衝突するように設計されていることを特徴とする請求項1記載の医療技術機器。
【請求項3】
互いに或る角度を成す複数の光電池列(14a、14b、14c)が設けられていることを特徴とする請求項1又は2記載の医療技術機器。
【請求項4】
互いに平行に配置された複数の光電池列(14a、14b、14c)が設けられていることを特徴とする請求項1乃至3の1つに記載の医療技術機器。
【請求項5】
複数の光電池列(14)が仮想円周上に配置されていることを特徴とする請求項3記載の医療技術機器。
【請求項6】
試験体(16)が患者テーブル(18)に精確に結合するための結合要素を有することを特徴とする請求項1乃至5の1つに記載の医療技術機器。
【請求項7】
試験体(16)が患者テーブル(18)の調整装置(20)の連結部に連結可能であることを特徴とする請求項1乃至5の1つに記載の医療技術機器。
【請求項8】
医療技術機器(2)のアイソセンタ(8)に関して座標表示系(10)内で患者テーブル(18)の位置決め精度をチェックするために、1列の光電池(22)で構成された少なくとも1つの光電池列(14)を有している試験体。
【請求項9】
試験体が板状台(26)とこれに直角に配置された少なくとも1つの柱(28)とを有する倒立したテーブルの形に構成され、台(26)には互いに或る角度を成して配置された少なくとも2つの光電池列(14a、14b)が設けられ、柱(28)には他の1つの光電池列(14c)が設けられていることを特徴とする請求項8記載の試験体。
【請求項10】
医療技術機器(2)のアイソセンタ(8)に関して座標表示系(10)内で患者テーブル(18)の位置決め精度をチェックする方法において、1列の光電池(22)で構成された光電池列(14)を有する試験体(16)が試験位置に移され、光電池列(14)が座標表示系(10)のビーム源(12)から放出された試験ビーム(24)を照射され、光電池列(14)によって取得された信号(S)に依存してアイソセンタ(8)に対して相対的な試験体(16)の位置が求められることを特徴とする患者テーブルの位置決め精度のチェック方法。
【請求項11】
光電池列(14)の信号(S)の位置が零点位置と比較されることを特徴とする請求項10記載の方法。
【請求項12】
試験体(16)が複数の方向から、座標表示系(10)の軸に対して平行に照射されることを特徴とする請求項10又は11記載の方法。
【請求項13】
アイソセンタ(8)に対して相対的な位置を求めるために試験体(16)が動かされ、光電池列(14)によって取得された信号(S)が評価される請求項10乃至12の1つに記載の方法。
【請求項1】
アイソセンタ(8)に位置決め可能な患者テーブル(18)と光学座標表示系(10)とを備え、この座標表示系(10)が、試験ビーム(24)を放出するために設けられた少なくとも1つのビーム源(12)を有する医療技術機器(2)において、患者テーブル(18)の位置決め精度をチェックするために、1列の光電池(22)で構成された少なくとも1つの光電池列(14)を有しビームを検出するための試験体(16)が設けられ、試験体の位置が患者テーブル(18)の位置と相関していることを特徴とする医療技術機器。
【請求項2】
試験ビーム(24)のビーム広がり(A)は、光電池列(14)に対して相対的に、試験ビーム(24)が光電池列(14)の光電池(22)の小部分にのみ衝突するように設計されていることを特徴とする請求項1記載の医療技術機器。
【請求項3】
互いに或る角度を成す複数の光電池列(14a、14b、14c)が設けられていることを特徴とする請求項1又は2記載の医療技術機器。
【請求項4】
互いに平行に配置された複数の光電池列(14a、14b、14c)が設けられていることを特徴とする請求項1乃至3の1つに記載の医療技術機器。
【請求項5】
複数の光電池列(14)が仮想円周上に配置されていることを特徴とする請求項3記載の医療技術機器。
【請求項6】
試験体(16)が患者テーブル(18)に精確に結合するための結合要素を有することを特徴とする請求項1乃至5の1つに記載の医療技術機器。
【請求項7】
試験体(16)が患者テーブル(18)の調整装置(20)の連結部に連結可能であることを特徴とする請求項1乃至5の1つに記載の医療技術機器。
【請求項8】
医療技術機器(2)のアイソセンタ(8)に関して座標表示系(10)内で患者テーブル(18)の位置決め精度をチェックするために、1列の光電池(22)で構成された少なくとも1つの光電池列(14)を有している試験体。
【請求項9】
試験体が板状台(26)とこれに直角に配置された少なくとも1つの柱(28)とを有する倒立したテーブルの形に構成され、台(26)には互いに或る角度を成して配置された少なくとも2つの光電池列(14a、14b)が設けられ、柱(28)には他の1つの光電池列(14c)が設けられていることを特徴とする請求項8記載の試験体。
【請求項10】
医療技術機器(2)のアイソセンタ(8)に関して座標表示系(10)内で患者テーブル(18)の位置決め精度をチェックする方法において、1列の光電池(22)で構成された光電池列(14)を有する試験体(16)が試験位置に移され、光電池列(14)が座標表示系(10)のビーム源(12)から放出された試験ビーム(24)を照射され、光電池列(14)によって取得された信号(S)に依存してアイソセンタ(8)に対して相対的な試験体(16)の位置が求められることを特徴とする患者テーブルの位置決め精度のチェック方法。
【請求項11】
光電池列(14)の信号(S)の位置が零点位置と比較されることを特徴とする請求項10記載の方法。
【請求項12】
試験体(16)が複数の方向から、座標表示系(10)の軸に対して平行に照射されることを特徴とする請求項10又は11記載の方法。
【請求項13】
アイソセンタ(8)に対して相対的な位置を求めるために試験体(16)が動かされ、光電池列(14)によって取得された信号(S)が評価される請求項10乃至12の1つに記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図7c】
【公開番号】特開2007−301365(P2007−301365A)
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2007−123347(P2007−123347)
【出願日】平成19年5月8日(2007.5.8)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成19年5月8日(2007.5.8)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
[ Back to top ]