
医療用個体識別機
【課題】検体を特定する識別データの読取りと識別データの入力の操作性が良く、しかも検体の汚染を防止した医療用個別識別機を提供する。
【解決手段】テーブルと、前記テーブルに内蔵されたアンテナであって前記テーブルに載せられた前記検体容器の識別データを読込むアンテナと、このテーブルの後部に立設されたディスプレイ部と、ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、この物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向を設定して、前記物体検知センサの検知信号を前記識別データの取り込み指令とする。
【解決手段】テーブルと、前記テーブルに内蔵されたアンテナであって前記テーブルに載せられた前記検体容器の識別データを読込むアンテナと、このテーブルの後部に立設されたディスプレイ部と、ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、この物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向を設定して、前記物体検知センサの検知信号を前記識別データの取り込み指令とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、生体から採取した細胞(検体)を培養、または細胞を管理するに際し、各細胞を個別に識別する医療用個体識別機に関する。
【背景技術】
【0002】
近年、治療医学において、患者の生体から細胞を採取し、細胞の中の幹細胞を培養、増殖させて、失われた患者の生体組織を再生する医療の研究が行われている。
【0003】
特許文献1には、生体から採取した細胞の取り違え等の危険を未然に防止するため、細胞の管理を確実に行う細胞管理システムが記載されている。このシステムでは、細胞全てを個別に識別するデータを用いて管理しており、細胞の収納容器(検体容器)に貼付した無線ICタグから読取ったデータを細胞の識別データとして用いる。読取られた識別データは、コンピュータ端末のキーボード、マウス、タッチパネル等で入力されてデータベースに格納される。上記の無線ICタグの読取り作業は、細胞管理システムの中で、細胞についての受入、分離、分化誘導、培養、保存、検査、出荷等のプロセスで、細胞の保管庫から細胞を出し入れする際に生じる。
【0004】
ところで、細胞培養室は細胞の汚染を防止するため、清浄度の高いクリーンルームとなっているが、汚染の一因として異細胞の接触があり、この接触は上記キーボード、マウス、タッチパネル等を介して引起される恐れがある。即ち、ある細胞の培養作業中に細胞が作業手袋に触れ、その手袋のまま入力操作するとキーボード、マウス、タッチパネル等に細胞が付着する。その後次の細胞について培養作業や入力操作を行うとき、手袋を交換しても上記キーボード等から先の細胞が交換した手袋に付着し、この手袋で次の細胞を扱う際に先の細胞が次の細胞に付着する。
【0005】
特許文献2には、汚れた手で機器への入力作業を行うことにより入力装置や機器に汚れが付着するのを防止するため、非接触で入力する非接触入力インターフェースが記載されている。
【0006】
【特許文献1】特開2005−332046号公報
【特許文献2】特開2005−141542号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記特許文献2は、物体が設定された距離範囲内にあることを検知する検知手段と、該検知手段での物体の検知及び非検知のパタンに対応する信号を作成する信号作成部と、該信号作成部で作成した信号を電気的に接続された機器に送信する送信部とを備えた構成となっている。このような構成とすれば、検知手段の検出範囲に、例えば手などを接近させることで検知手段が手を物体として検出し、2つの検知手段を横切るように手を動かせば、2つの検知手段は順次手を検知することになる。したがって、2つの検知手段が物体を検知した順番によって操作などを指令する信号を割り当てておけば、複数種類の信号を入力することができる。
【0008】
上記特許文献2の非接触入力インターフェースでは入力装置や機器への汚れ付着が防止できるので、細胞管理システムでの異細胞の接触防止への応用が考えられる。この場合、コンピュータ端末で、検体容器の無線ICタグの識別データを読取り、読取った識別データを非接触で端末に入力操作することが考えられる。しかし識別データ読取りのために検体容器を操作者が手で持って読取り位置まで移動させる動作と、非接触入力のための操作者の手の動作が混在してしまう恐れがある。即ち、識別データ読取り操作時の手や検体容器の動きが、非接触入力時の操作者の手の動きと誤検出される恐れがある。
これを防止するには、識別データ読取り場所と非接触入力場所を混同しないように大きく離しておけば良いが、装置が大型化するという問題と共に、識別データ読取り操作と手の動きによる入力操作が離れた場所や方向が異なることになるので、動作が不自然で不便となり、操作性が悪いという問題がある。
【0009】
本発明は上記不具合に鑑みてなされたものであり、その目的は、検体の汚染がなく、コンパクトな装置のままで検体の識別データの読取り動作が非接触入力作業で誤検知されることがない、操作性の高い医療用個体識別機を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、検体容器を検知するテーブルと、前記テーブルに内蔵されたアンテナであって前記検体容器の識別データを読込むアンテナと、前記テーブルの後部に立設されたディスプレイ部と、前記ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、前記物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向を設定したことを特徴とする。なお、前記ディスプレイ部を傾斜させることにより前記物体検知センサの検知方向を設定しても良い。
【発明の効果】
【0011】
本発明によれば、培養される検体に汚染が起りにくく、誤検知が無いので各検体の識別データの読取りと、このデータの入力の操作性が高く、しかも装置を小型化できる。
【発明を実施するための最良の形態】
【0012】
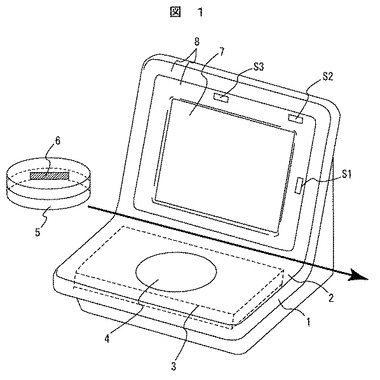
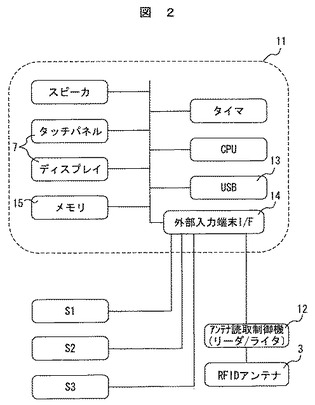
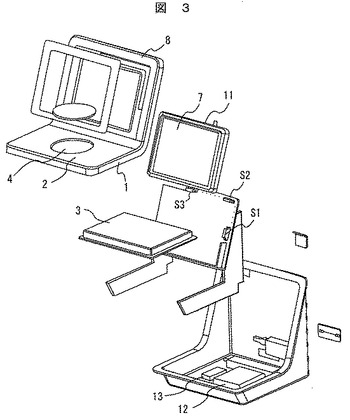
図1は検体(細胞)の個別管理のための細胞等を認識する医療用個別識別機であるコンピュータ端末装置の外観図、図2は装置の制御ブロック図、図3は装置の分解斜視図である。コンピュータ端末装置は、クリーンルーム内に設置され、細胞管理システムの中で、細胞についての受入、分離、分化誘導、培養、保存、検査、出荷等のプロセスで、保管庫から細胞を出し入れする際に細胞を識別する識別データを読取るリーダとなる。
【0013】
培養作業では各細胞毎に専用の薬品、消耗品、機材等を用いて異なる細胞の接触を避けているが、これらの機材等も細胞と同様にコンピュータ端末装置で識別されて管理され、取り違え防止が図られる。
【0014】
コンピュータ端末装置1の上テーブル2の裏面にはRFID(Radio Frequency Identification)のループ状のアンテナ3が内蔵されている。生体から採取した検体(細胞)が入れられた検体容器5には、検体の識別データが記憶されたICタグ(RFID)6が貼付されている。検体容器5を操作者が手で持って上テーブル2の一部に形成された円形のID読取部マーク4の上に載せるか、又はID読取部マーク4に近接させながら検体容器5を操作者が手で持って矢印方向(左から右)に通過させることにより、検体容器5に貼付されたICタグ(RFID)6の識別データがアンテナ3から読取られる。ここでID読取部マーク4の上方に仮想的にRFIDアンテナによる読取範囲が円筒状に形成される。
【0015】
識別データはアンテナ2を介してアンテナ読取制御機12で読取られ、装置1の制御部11の外部入力端末インターフェース14に転送される。制御部11では、CPU12によりメモリ15等に事前登録の検体データとアンテナから読取られた検体の識別データとが比較され、一致すれば正常な検体としてこの検体の識別データは、読取時間、読取時の作業工程データ等と共に、事前登録の検体データに代わって更新登録される。なお、メモリ15への検体データの事前登録はUSB13を介して外部から読込んでも良い。7はディスプレイ(兼タッチパネル)、8はディスプレイ7の外枠で、7と8でディプレイ部を構成する。
【0016】
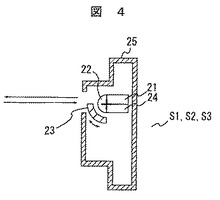
S2、S3はディスプレイ部の周辺となる外枠8の上方に横方向に離して設けられた2個の物体検知センサであり、S1はディスプレイ7の外枠8の右側部上方寄りに設けられた物体検知センサである。これらのセンサは赤外線距離センサで、図4に示すようにケース25に内蔵した発光部のLED(発光ダイオード)21からの赤外線がレンズ22を通して放射され、物体からの反射光を光センサ24で受けて物体を検出する。物体の検知距離は、レンズ22手前の読取距離調整絞り23を回転することで光センサ24のセンサ感度を調整して決められる。この距離は物体の検知範囲を定めるもので、この範囲の物体を検知可能となる。
【0017】
上記物体検知センサセンサS1〜S3は、センサの検知距離内にあるディスプレイ7前方の操作者の手を検知するために設けられ、センサからの検知信号は制御部11に送られ、制御部11は各センサからの検知信号の発生順序や発生形態で所定の入力信号を作成して装置1の入力操作信号とする。
【0018】
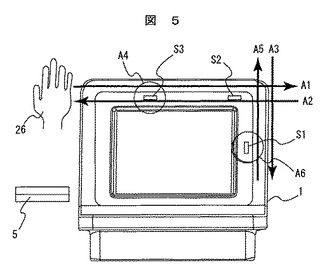
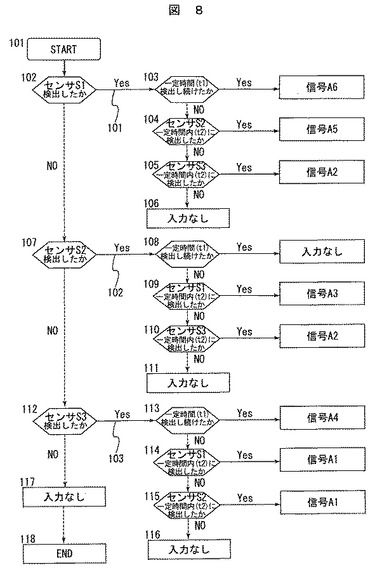
図5は物体検知センサS1〜S3に対する手振りの動作を説明する図である。操作者が自身の手26をセンサS3側からセンサS2に向けて横に振る動作A1を行うと、制御部11は所定時間内に時間差(t2)を有してセンサ3からの検出信号、そしてセンサS2からの検知信号を順次受けることになる。これによって、制御部11は図8で示すように、センサ3で手26を検出し(ステップ112)、次いでセンサ2で手26を検知した(ステップ115)ことに対応して信号A1を作成する。なお、ステップ112、ステップ114を経ても制御部11は信号A1を作成しているが、これは手26をセンサS3側からセンサS2に向けて横に振るつもりが、多少異なった方向の斜め下方に振れてしまっても同じ動作と判断することで、適応性を向上させている。
【0019】
上記と逆、即ち、手26をセンサS2側からセンサS3に向けて横に振る動作A2を行うと、制御部11は図8で示すようにステップ107、ステップ110を経て信号A2を生成する。なお、ステップ102、ステップ105を経ても制御部11は信号A2を作成しているが、これは手26をセンサS2側からセンサS3に向けて横に振るつもりが、斜め下方からセンサ3に向けて振れてしまっても同じ動作と判断することで、適応性を向上させている。なお、時間t2は手26の通過で生じる時差であり、通常0.3秒程度である。
【0020】
操作者自身の手26をセンサS2側からセンサS1に向けて縦に振る動作A3を行うと、制御部11は所定時間内に時間差(t2)を有してセンサ2からの検知信号、そしてセンサ1からの検知信号を順次受けることになる。これによって、制御部11は図8で示すように、センサ2で手26を検知し(ステップ107)、次いでセンサ1で手26を検知した(ステップ109)ことに対応して信号A3を作成する。上記と逆、即ち、手26をセンサS1側からセンサS2に向けて縦に振る動作A5を行うと、制御部11でステップ102、ステップ104を経て信号A5を生成する。
【0021】
円形で示す動作A4とA6とは、検知対象物である手26をそれぞれセンサ3とセンサ1とにかざしている動作を示す。センサ3に手26を所定時間(t1)以上かざすと、制御部11はセンサ3からの検知信号を一定時間(t1)検出し続けることになり、これによって、制御部11は図8に示すように、センサ3の検知信号を一定時間(t1)検知し続ける(ステップ112、113)ことに対応して信号A4を作成する。
【0022】
同様にセンサ1に手26を所定時間(t1)以上かざすと、制御部11はセンサ1からの検知信号を一定時間(t1)検知し続けることになり、これによって、制御部11は図8に示すように、センサ1の検知信号を一定時間(t1)検知し続ける(ステップ102、103)ことに対応して信号A6を作成する。なお、時間t1は手26をかざしている時間であり、1〜2秒程度である。
【0023】
上記の手振り動作に基づいて制御部11で得られた信号A1〜A6は、コンピュータ端末装置1の動作開始・終了や、細胞の識別データの読込み指令等の入力信号となる。一例として各信号は次のような指令コマンドとして用いられる。
信号A1(S3→S2、S3→S1):次に進む
信号A2(S2→S3、S1→S3):前に戻る
信号A3(S2→S1):確認
信号A4(S3かざす):開始する
信号A5(S1→S2):終了する
信号A6(S1にかざす):チェックを入れる。
【0024】
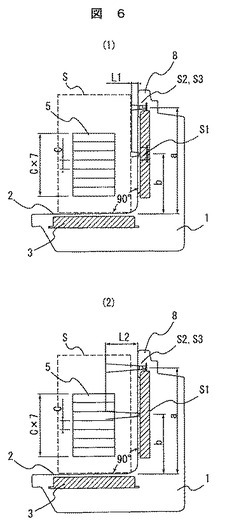
図6は物体検知センサS1〜S3の検知距離(L1,L2)と、RFIDアンテナ3によるICタグの読取範囲(S)の関係を説明する図である。ここではセンサS1〜S3の検知角度(絞り)が小さいものを用い、図6(1)では高さCの検体容器5を7個積層した各容器のICタグから各検体の識別データを読み込む。
【0025】
物体検知センサS1〜S3は装置1の上テーブル2からほぼ垂直に立ち上がったディスプレイ7の外枠8に設けられ、その検知方向は外枠8面から上テーブル2に平行となるように設けられる。センサS1〜S3の検知距離は、アンテナ3によるICタグの読取範囲(S)に達しないように(重ならないように)、短い距離L1に設定される。しかし検知距離L1が短いため、手振り動作時にディスプレイ7や外枠8に接触しないように注意が必要であり、操作性が極めて悪い。また、誤って手26がセンサやディスプレイ7に接触することもあり、検体の汚染の恐れがある。
【0026】
この解決策としてセンサの検知距離を長くすることが考えられ、これを図6(2)に示す。センサの検知距離L2が水平方向に長く設定されているため、手26がディスプレイ7、外枠8、センサS1〜S3等に接触しにくく、操作性が大幅に向上する。
【0027】
しかしながら、センサの検知距離L2が水平方向に長くなると、RFIDアンテナ3によるICタグの読取範囲(S)に届き、更にこの中のテーブル2に積層した検体容器5まで達する恐れがある。この場合、ICタグからの識別データ読取り操作時に、検体容器5やこれを支える操作者の手や指が、センサS1〜S3により検知対象物として誤検知される恐れがある。
【0028】
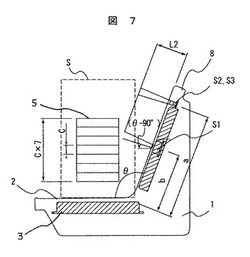
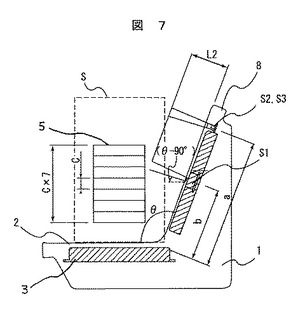
図7は上記を解決する実施例1の説明図である。装置1は後部に立設されたディスプレイ7と外枠8の部分が、上テーブル2に対して所定の鈍角θを持たせて後方に傾けて設けられる。物体検知センサS1〜S3の検知距離は、図6(2)同様にディスプレイ7の前方向にL2に設定されるが、ディスプレイ7と外枠8の部分の所定角度θの傾きにより、外枠8に設けられたセンサS1〜S3の検知方向は、ほぼ仰角(θ−90°)を有する斜め上方となる。そして、物体検知センサの検知距離L2は識別データ読取操作時のテーブル2上の積層した検体容器5又はこれを支える操作者の手26に達しないように、角度θと検知距離L2が調整設定される。
【0029】
図7の構成によれば、センサS1〜S3の検知距離L2を長く設定することが出来るので、手振り操作時の手26が前後(ディスプレイ7方向)に多少移動してもディスプレイ7、外枠8、センサS1〜S3等に接触しにくく、手振りの操作性が大幅に向上する。しかもセンサS1〜S3の検知距離L2がテーブル2上の積層した検体入り容器5又はこれを支える操作者の手26に達しないので、ICタグからの識別データ読取操作時に、検体容器5やこれを支える手指が、物体検知センサS1〜S3により誤検知される恐れがない。
【0030】
さらに、センサS1〜S3の検知方向がディスプレイ7の前方に向かって設定されているので、検体入り容器の識別データの読取り操作と手振りによる入力操作とがディスプレイ7の前方の位置となるので、動作が自然で操作性が大幅に向上する。
【0031】
上記例ではディスプレイ7と外枠8の部分の所定角度θの傾きにより、検知距離が積層した検体容器5に達しないように構成されているが、これに代えて、ディスプレイ7と外枠8の部分を上テーブル2の後部に垂直に立設し、外枠8に物体検知センサS1〜S3を斜め上方に向くように設けても良い。
【0032】
さらに、上記例ではいずれも物体検知センサの検知方向を傾けることにより、検知距離が積層した検体容器5に達しないように構成されているが、これに代えて、検知距離が積層した検体容器5に達しないように、手振りの操作性を悪化させない程度で物体検知センサの検知距離を短くしても良い。
【図面の簡単な説明】
【0033】
【図1】本発明に係る医療用個別識別機の外観図。
【図2】本発明に係る医療用個別識別機の制御ブロック図。
【図3】本発明に係る医療用個別識別機の分解斜視図。
【図4】本発明に係る物体検知センサの動作説明図。
【図5】本発明に係る物体検知センサに対する手の動作を説明する図。
【図6】センサ検知距離とICタグの読取範囲の関係を説明する図。
【図7】本発明に係る実施例の説明図。
【図8】本発明に係る制御部の動作流れ図。
【符号の説明】
【0034】
1…医療用個別識別機、2…テーブル、3…アンテナ、5…検体容器、6…ICタグ(識別データ)、7…ディスプレイ、8…外枠、7,8…ディスプレイ部、11…制御部、S1、S2、S3…物体検出センサ、L2…検知距離。
【技術分野】
【0001】
本発明は、生体から採取した細胞(検体)を培養、または細胞を管理するに際し、各細胞を個別に識別する医療用個体識別機に関する。
【背景技術】
【0002】
近年、治療医学において、患者の生体から細胞を採取し、細胞の中の幹細胞を培養、増殖させて、失われた患者の生体組織を再生する医療の研究が行われている。
【0003】
特許文献1には、生体から採取した細胞の取り違え等の危険を未然に防止するため、細胞の管理を確実に行う細胞管理システムが記載されている。このシステムでは、細胞全てを個別に識別するデータを用いて管理しており、細胞の収納容器(検体容器)に貼付した無線ICタグから読取ったデータを細胞の識別データとして用いる。読取られた識別データは、コンピュータ端末のキーボード、マウス、タッチパネル等で入力されてデータベースに格納される。上記の無線ICタグの読取り作業は、細胞管理システムの中で、細胞についての受入、分離、分化誘導、培養、保存、検査、出荷等のプロセスで、細胞の保管庫から細胞を出し入れする際に生じる。
【0004】
ところで、細胞培養室は細胞の汚染を防止するため、清浄度の高いクリーンルームとなっているが、汚染の一因として異細胞の接触があり、この接触は上記キーボード、マウス、タッチパネル等を介して引起される恐れがある。即ち、ある細胞の培養作業中に細胞が作業手袋に触れ、その手袋のまま入力操作するとキーボード、マウス、タッチパネル等に細胞が付着する。その後次の細胞について培養作業や入力操作を行うとき、手袋を交換しても上記キーボード等から先の細胞が交換した手袋に付着し、この手袋で次の細胞を扱う際に先の細胞が次の細胞に付着する。
【0005】
特許文献2には、汚れた手で機器への入力作業を行うことにより入力装置や機器に汚れが付着するのを防止するため、非接触で入力する非接触入力インターフェースが記載されている。
【0006】
【特許文献1】特開2005−332046号公報
【特許文献2】特開2005−141542号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記特許文献2は、物体が設定された距離範囲内にあることを検知する検知手段と、該検知手段での物体の検知及び非検知のパタンに対応する信号を作成する信号作成部と、該信号作成部で作成した信号を電気的に接続された機器に送信する送信部とを備えた構成となっている。このような構成とすれば、検知手段の検出範囲に、例えば手などを接近させることで検知手段が手を物体として検出し、2つの検知手段を横切るように手を動かせば、2つの検知手段は順次手を検知することになる。したがって、2つの検知手段が物体を検知した順番によって操作などを指令する信号を割り当てておけば、複数種類の信号を入力することができる。
【0008】
上記特許文献2の非接触入力インターフェースでは入力装置や機器への汚れ付着が防止できるので、細胞管理システムでの異細胞の接触防止への応用が考えられる。この場合、コンピュータ端末で、検体容器の無線ICタグの識別データを読取り、読取った識別データを非接触で端末に入力操作することが考えられる。しかし識別データ読取りのために検体容器を操作者が手で持って読取り位置まで移動させる動作と、非接触入力のための操作者の手の動作が混在してしまう恐れがある。即ち、識別データ読取り操作時の手や検体容器の動きが、非接触入力時の操作者の手の動きと誤検出される恐れがある。
これを防止するには、識別データ読取り場所と非接触入力場所を混同しないように大きく離しておけば良いが、装置が大型化するという問題と共に、識別データ読取り操作と手の動きによる入力操作が離れた場所や方向が異なることになるので、動作が不自然で不便となり、操作性が悪いという問題がある。
【0009】
本発明は上記不具合に鑑みてなされたものであり、その目的は、検体の汚染がなく、コンパクトな装置のままで検体の識別データの読取り動作が非接触入力作業で誤検知されることがない、操作性の高い医療用個体識別機を提供することにある。
【課題を解決するための手段】
【0010】
本発明は、検体容器を検知するテーブルと、前記テーブルに内蔵されたアンテナであって前記検体容器の識別データを読込むアンテナと、前記テーブルの後部に立設されたディスプレイ部と、前記ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、前記物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向を設定したことを特徴とする。なお、前記ディスプレイ部を傾斜させることにより前記物体検知センサの検知方向を設定しても良い。
【発明の効果】
【0011】
本発明によれば、培養される検体に汚染が起りにくく、誤検知が無いので各検体の識別データの読取りと、このデータの入力の操作性が高く、しかも装置を小型化できる。
【発明を実施するための最良の形態】
【0012】
図1は検体(細胞)の個別管理のための細胞等を認識する医療用個別識別機であるコンピュータ端末装置の外観図、図2は装置の制御ブロック図、図3は装置の分解斜視図である。コンピュータ端末装置は、クリーンルーム内に設置され、細胞管理システムの中で、細胞についての受入、分離、分化誘導、培養、保存、検査、出荷等のプロセスで、保管庫から細胞を出し入れする際に細胞を識別する識別データを読取るリーダとなる。
【0013】
培養作業では各細胞毎に専用の薬品、消耗品、機材等を用いて異なる細胞の接触を避けているが、これらの機材等も細胞と同様にコンピュータ端末装置で識別されて管理され、取り違え防止が図られる。
【0014】
コンピュータ端末装置1の上テーブル2の裏面にはRFID(Radio Frequency Identification)のループ状のアンテナ3が内蔵されている。生体から採取した検体(細胞)が入れられた検体容器5には、検体の識別データが記憶されたICタグ(RFID)6が貼付されている。検体容器5を操作者が手で持って上テーブル2の一部に形成された円形のID読取部マーク4の上に載せるか、又はID読取部マーク4に近接させながら検体容器5を操作者が手で持って矢印方向(左から右)に通過させることにより、検体容器5に貼付されたICタグ(RFID)6の識別データがアンテナ3から読取られる。ここでID読取部マーク4の上方に仮想的にRFIDアンテナによる読取範囲が円筒状に形成される。
【0015】
識別データはアンテナ2を介してアンテナ読取制御機12で読取られ、装置1の制御部11の外部入力端末インターフェース14に転送される。制御部11では、CPU12によりメモリ15等に事前登録の検体データとアンテナから読取られた検体の識別データとが比較され、一致すれば正常な検体としてこの検体の識別データは、読取時間、読取時の作業工程データ等と共に、事前登録の検体データに代わって更新登録される。なお、メモリ15への検体データの事前登録はUSB13を介して外部から読込んでも良い。7はディスプレイ(兼タッチパネル)、8はディスプレイ7の外枠で、7と8でディプレイ部を構成する。
【0016】
S2、S3はディスプレイ部の周辺となる外枠8の上方に横方向に離して設けられた2個の物体検知センサであり、S1はディスプレイ7の外枠8の右側部上方寄りに設けられた物体検知センサである。これらのセンサは赤外線距離センサで、図4に示すようにケース25に内蔵した発光部のLED(発光ダイオード)21からの赤外線がレンズ22を通して放射され、物体からの反射光を光センサ24で受けて物体を検出する。物体の検知距離は、レンズ22手前の読取距離調整絞り23を回転することで光センサ24のセンサ感度を調整して決められる。この距離は物体の検知範囲を定めるもので、この範囲の物体を検知可能となる。
【0017】
上記物体検知センサセンサS1〜S3は、センサの検知距離内にあるディスプレイ7前方の操作者の手を検知するために設けられ、センサからの検知信号は制御部11に送られ、制御部11は各センサからの検知信号の発生順序や発生形態で所定の入力信号を作成して装置1の入力操作信号とする。
【0018】
図5は物体検知センサS1〜S3に対する手振りの動作を説明する図である。操作者が自身の手26をセンサS3側からセンサS2に向けて横に振る動作A1を行うと、制御部11は所定時間内に時間差(t2)を有してセンサ3からの検出信号、そしてセンサS2からの検知信号を順次受けることになる。これによって、制御部11は図8で示すように、センサ3で手26を検出し(ステップ112)、次いでセンサ2で手26を検知した(ステップ115)ことに対応して信号A1を作成する。なお、ステップ112、ステップ114を経ても制御部11は信号A1を作成しているが、これは手26をセンサS3側からセンサS2に向けて横に振るつもりが、多少異なった方向の斜め下方に振れてしまっても同じ動作と判断することで、適応性を向上させている。
【0019】
上記と逆、即ち、手26をセンサS2側からセンサS3に向けて横に振る動作A2を行うと、制御部11は図8で示すようにステップ107、ステップ110を経て信号A2を生成する。なお、ステップ102、ステップ105を経ても制御部11は信号A2を作成しているが、これは手26をセンサS2側からセンサS3に向けて横に振るつもりが、斜め下方からセンサ3に向けて振れてしまっても同じ動作と判断することで、適応性を向上させている。なお、時間t2は手26の通過で生じる時差であり、通常0.3秒程度である。
【0020】
操作者自身の手26をセンサS2側からセンサS1に向けて縦に振る動作A3を行うと、制御部11は所定時間内に時間差(t2)を有してセンサ2からの検知信号、そしてセンサ1からの検知信号を順次受けることになる。これによって、制御部11は図8で示すように、センサ2で手26を検知し(ステップ107)、次いでセンサ1で手26を検知した(ステップ109)ことに対応して信号A3を作成する。上記と逆、即ち、手26をセンサS1側からセンサS2に向けて縦に振る動作A5を行うと、制御部11でステップ102、ステップ104を経て信号A5を生成する。
【0021】
円形で示す動作A4とA6とは、検知対象物である手26をそれぞれセンサ3とセンサ1とにかざしている動作を示す。センサ3に手26を所定時間(t1)以上かざすと、制御部11はセンサ3からの検知信号を一定時間(t1)検出し続けることになり、これによって、制御部11は図8に示すように、センサ3の検知信号を一定時間(t1)検知し続ける(ステップ112、113)ことに対応して信号A4を作成する。
【0022】
同様にセンサ1に手26を所定時間(t1)以上かざすと、制御部11はセンサ1からの検知信号を一定時間(t1)検知し続けることになり、これによって、制御部11は図8に示すように、センサ1の検知信号を一定時間(t1)検知し続ける(ステップ102、103)ことに対応して信号A6を作成する。なお、時間t1は手26をかざしている時間であり、1〜2秒程度である。
【0023】
上記の手振り動作に基づいて制御部11で得られた信号A1〜A6は、コンピュータ端末装置1の動作開始・終了や、細胞の識別データの読込み指令等の入力信号となる。一例として各信号は次のような指令コマンドとして用いられる。
信号A1(S3→S2、S3→S1):次に進む
信号A2(S2→S3、S1→S3):前に戻る
信号A3(S2→S1):確認
信号A4(S3かざす):開始する
信号A5(S1→S2):終了する
信号A6(S1にかざす):チェックを入れる。
【0024】
図6は物体検知センサS1〜S3の検知距離(L1,L2)と、RFIDアンテナ3によるICタグの読取範囲(S)の関係を説明する図である。ここではセンサS1〜S3の検知角度(絞り)が小さいものを用い、図6(1)では高さCの検体容器5を7個積層した各容器のICタグから各検体の識別データを読み込む。
【0025】
物体検知センサS1〜S3は装置1の上テーブル2からほぼ垂直に立ち上がったディスプレイ7の外枠8に設けられ、その検知方向は外枠8面から上テーブル2に平行となるように設けられる。センサS1〜S3の検知距離は、アンテナ3によるICタグの読取範囲(S)に達しないように(重ならないように)、短い距離L1に設定される。しかし検知距離L1が短いため、手振り動作時にディスプレイ7や外枠8に接触しないように注意が必要であり、操作性が極めて悪い。また、誤って手26がセンサやディスプレイ7に接触することもあり、検体の汚染の恐れがある。
【0026】
この解決策としてセンサの検知距離を長くすることが考えられ、これを図6(2)に示す。センサの検知距離L2が水平方向に長く設定されているため、手26がディスプレイ7、外枠8、センサS1〜S3等に接触しにくく、操作性が大幅に向上する。
【0027】
しかしながら、センサの検知距離L2が水平方向に長くなると、RFIDアンテナ3によるICタグの読取範囲(S)に届き、更にこの中のテーブル2に積層した検体容器5まで達する恐れがある。この場合、ICタグからの識別データ読取り操作時に、検体容器5やこれを支える操作者の手や指が、センサS1〜S3により検知対象物として誤検知される恐れがある。
【0028】
図7は上記を解決する実施例1の説明図である。装置1は後部に立設されたディスプレイ7と外枠8の部分が、上テーブル2に対して所定の鈍角θを持たせて後方に傾けて設けられる。物体検知センサS1〜S3の検知距離は、図6(2)同様にディスプレイ7の前方向にL2に設定されるが、ディスプレイ7と外枠8の部分の所定角度θの傾きにより、外枠8に設けられたセンサS1〜S3の検知方向は、ほぼ仰角(θ−90°)を有する斜め上方となる。そして、物体検知センサの検知距離L2は識別データ読取操作時のテーブル2上の積層した検体容器5又はこれを支える操作者の手26に達しないように、角度θと検知距離L2が調整設定される。
【0029】
図7の構成によれば、センサS1〜S3の検知距離L2を長く設定することが出来るので、手振り操作時の手26が前後(ディスプレイ7方向)に多少移動してもディスプレイ7、外枠8、センサS1〜S3等に接触しにくく、手振りの操作性が大幅に向上する。しかもセンサS1〜S3の検知距離L2がテーブル2上の積層した検体入り容器5又はこれを支える操作者の手26に達しないので、ICタグからの識別データ読取操作時に、検体容器5やこれを支える手指が、物体検知センサS1〜S3により誤検知される恐れがない。
【0030】
さらに、センサS1〜S3の検知方向がディスプレイ7の前方に向かって設定されているので、検体入り容器の識別データの読取り操作と手振りによる入力操作とがディスプレイ7の前方の位置となるので、動作が自然で操作性が大幅に向上する。
【0031】
上記例ではディスプレイ7と外枠8の部分の所定角度θの傾きにより、検知距離が積層した検体容器5に達しないように構成されているが、これに代えて、ディスプレイ7と外枠8の部分を上テーブル2の後部に垂直に立設し、外枠8に物体検知センサS1〜S3を斜め上方に向くように設けても良い。
【0032】
さらに、上記例ではいずれも物体検知センサの検知方向を傾けることにより、検知距離が積層した検体容器5に達しないように構成されているが、これに代えて、検知距離が積層した検体容器5に達しないように、手振りの操作性を悪化させない程度で物体検知センサの検知距離を短くしても良い。
【図面の簡単な説明】
【0033】
【図1】本発明に係る医療用個別識別機の外観図。
【図2】本発明に係る医療用個別識別機の制御ブロック図。
【図3】本発明に係る医療用個別識別機の分解斜視図。
【図4】本発明に係る物体検知センサの動作説明図。
【図5】本発明に係る物体検知センサに対する手の動作を説明する図。
【図6】センサ検知距離とICタグの読取範囲の関係を説明する図。
【図7】本発明に係る実施例の説明図。
【図8】本発明に係る制御部の動作流れ図。
【符号の説明】
【0034】
1…医療用個別識別機、2…テーブル、3…アンテナ、5…検体容器、6…ICタグ(識別データ)、7…ディスプレイ、8…外枠、7,8…ディスプレイ部、11…制御部、S1、S2、S3…物体検出センサ、L2…検知距離。
【特許請求の範囲】
【請求項1】
検体容器を読込むテーブルと、前記テーブルに内蔵されたアンテナであって前記検体容器の識別データを読込むアンテナと、前記テーブルの後部に立設されたディスプレイ部と、前記ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、前記物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向または検知距離を設定したことを特徴とする医療用個体識別機。
【請求項2】
前記ディスプレイ部を傾斜させることにより前記物体検知センサの検知方向を設定したことを特徴とする請求項1記載の医療用個体識別機。
【請求項1】
検体容器を読込むテーブルと、前記テーブルに内蔵されたアンテナであって前記検体容器の識別データを読込むアンテナと、前記テーブルの後部に立設されたディスプレイ部と、前記ディスプレイ部の周辺に複数設けられ前方の対象物体を検知する物体検知センサと、前記物体検知センサの検知信号を受けて入力信号を作成する制御部を有し、前記物体検知センサの検知距離が識別データ読込操作時の前記検体容器又は操作者の手に達しないように前記物体検知センサの検知方向または検知距離を設定したことを特徴とする医療用個体識別機。
【請求項2】
前記ディスプレイ部を傾斜させることにより前記物体検知センサの検知方向を設定したことを特徴とする請求項1記載の医療用個体識別機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2008−286592(P2008−286592A)
【公開日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願番号】特願2007−130555(P2007−130555)
【出願日】平成19年5月16日(2007.5.16)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
【公開日】平成20年11月27日(2008.11.27)
【国際特許分類】
【出願日】平成19年5月16日(2007.5.16)
【出願人】(000005452)株式会社日立プラントテクノロジー (1,767)
【Fターム(参考)】
[ Back to top ]