
医薬品の製造装置

【課題】 デバイスに薬剤が充填された高活性医薬品を安全且つ安定的に生産することのできる医薬品の製造装置を提供する。
【解決手段】 アイソレータ114内に充填装置18等が備えられると共に、スリーブスーツ120で先端部を除いて気密に覆われたロボット78等でデバイス76が移送される。そのため、薬剤充填などに人が関与しないので、高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、ロボット78等によるデバイス76の移送はピックアンドプレイスで行われるため、デバイス76の転倒や破損が生じない。しかも、ロボット78等は、関節を含む基台40側はスリーブスーツ120によって気密に覆われているので、その関節等からの発塵によるアイソレータ114内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液がロボット78等に付着してこれを腐食させることが抑制される。
【解決手段】 アイソレータ114内に充填装置18等が備えられると共に、スリーブスーツ120で先端部を除いて気密に覆われたロボット78等でデバイス76が移送される。そのため、薬剤充填などに人が関与しないので、高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、ロボット78等によるデバイス76の移送はピックアンドプレイスで行われるため、デバイス76の転倒や破損が生じない。しかも、ロボット78等は、関節を含む基台40側はスリーブスーツ120によって気密に覆われているので、その関節等からの発塵によるアイソレータ114内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液がロボット78等に付着してこれを腐食させることが抑制される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、薬剤をデバイスに充填して医薬品を製造するための装置に関し、特に、抗がん剤やバイオ製剤などの高活性医薬品を安全且つ安定的に生産することが可能な製造装置に関する。
【背景技術】
【0002】
薬液をガラス製或いは樹脂製のシリンジに充填して封止したプレフィルドシリンジ(プレフィルド製剤ともいう)や、バイアルに薬剤を充填して封止したバイアル製剤等、薬剤をガラス製や樹脂製のデバイスに充填した医薬品が知られている。このような医薬品の製造は、シリンジやバイアル等のデバイスを用意し、例えば、クリーンルーム内若しくは無菌室内に設置された密閉型ラミナーブースにおいて以下のようにして行われる。
【0003】
まず、用意されたデバイスに洗浄処理を施し、次いで、滅菌処理を施す。一般に、ガラス製デバイスに対しては乾熱滅菌処理が行われ、樹脂製デバイスに対しては蒸気滅菌処理が行われる。次いで、このデバイスに所定量の薬剤を充填し、開口を打栓して塞ぎ、必要に応じてキャップシールを被せてこれを密着させる。この後、デバイス外部に付着した薬剤が洗い流され、トレイ等に集積されて検査工程に送られる。
【0004】
上記のようにして医薬品を製造するに際して、各処理工程或いは各処理領域に設けられたステーションへのデバイスの移送は、ベルトコンベアに乗せ、或いは、摩擦係数の小さい平坦な台上にデバイスを順次に乗せて後工程に向かって押し出す等で行われていた。しかしながら、このような移送方法では、ベルトコンベアの振動やデバイスと台との摩擦などに起因してデバイスが倒れ、或いはデバイスが相互にぶつかることで破損し易い問題がある。
【0005】
これに対して、デバイスの整列供給工程、薬剤充填工程、および施栓工程の各工程間のデバイスの受け渡しを工程間に配設したロボットで行う薬液充填施栓システムが提案されている(例えば、特許文献1を参照。)。この薬液充填施栓システムは、デバイスの形状や大きさ等に合わせてロボットをプログラム制御することにより、1ラインで種々のデバイスに対応できるようにしたものである。また、多関節ロボットを用いることで次工程の作業に適した姿勢でデバイスの受け渡しを行い得ると共に、デバイスを保持するためにロボットに取り付けられるチャックがデバイスの形状に合わせて交換可能になっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−104324号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、抗がん剤やバイオ製剤等の高活性医薬品を製造するに際しては、薬剤充填工程を周囲環境から物理的に隔離する目的でアイソレータ(すなわち無菌室)が用いられる。アイソレータを備えた製造装置では、アイソレータを気密に閉じて過酸化水素ガス等で除染処理を施し、アイソレータ内と室内に圧力差を設けてその管理環境下でデバイスの投入や製剤の充填が行われる。室内への漏洩リスク軽減を図る場合にはアイソレータ内を陰圧にし、また、外部からの侵入防止を重視する場合にはアイソレータ内を陽圧にすることにより、各々の必要環境に対応した環境を形成する。このようにして製造される高活性医薬品は、薬剤に触れると人体に影響があり、しかも、ベルトコンベア等を用いた移送方法でデバイスが移送中に倒れて破損すると高価な薬剤の損失が大きい。そこで、高活性医薬品を安全且つ安定的に生産できるように、前記特許文献1に記載されるような薬液充填施栓システムを採用し、薬剤が取り扱われる充填・施栓処理をロボットで行うことが考えられる。
【0008】
また、前記特許文献1に記載された薬液充填施栓システムなど、従来の医薬品製造装置では、デバイスの洗浄および滅菌処理室と充填室(無菌室)とが別々に設けられていたが、上記のようなアイソレータを備えることにより、洗浄・滅菌室と充填室との隔壁を無用として、一室内に各装置を設置できる。この結果、無菌管理および薬剤の外部への暴露が生じない環境管理を行い得る。しかも、環境管理を室単位ではなく機械設備の必要部分に限定できるので、バイオ製剤等のための低温等の特殊環境の形成や管理が容易になる。
【0009】
しかしながら、上記ロボットをアイソレータ内に設置した場合、ロボットからの発塵を避けられないため無菌環境の形成が困難になる。また、薬剤は腐食性を有するものも多いため、その飛沫でロボットが腐食し得る。付着した薬剤は洗浄除去されるが、ロボットはその洗浄液によっても腐食させられる。しかも、無菌環境を形成するための過酸化水素ガス等は強い腐食性を有するため、除染処理の際にもロボットが腐食し得る。このため、これらに対して何ら対処することなく前記特許文献1に記載されたロボットを製造工程に適用しても、工程の安定性に欠ける問題がある。
【0010】
本発明は、以上の事情を背景として為されたものであって、その目的は、デバイスに薬剤が充填された高活性医薬品を安全且つ安定的に生産することのできる医薬品の製造装置を提供することにある。
【課題を解決するための手段】
【0011】
斯かる目的を達成するため、本発明の要旨とするところは、洗浄処理および滅菌処理を施したデバイスに薬剤を充填して打栓することにより医薬品を製造するための製造装置であって、(a)滅菌処理済のデバイスの入口および出口を開閉可能に備えたアイソレータと、(b)前記デバイスに薬剤を充填するために前記アイソレータ内に設けられた充填領域と、(c)前記薬剤が充填されたデバイスに打栓するために前記アイソレータ内に設けられた打栓領域と、(d)前記アイソレータ内において前記各領域にそれぞれ設置されると共に少なくともアーム先端部を露出させた状態でスリーブスーツによって関節が気密に覆われ且つ前記各領域間で前記デバイスを移送する多関節の複数の作業ロボットとを、含むことにある。
【発明の効果】
【0012】
このようにすれば、医薬品の製造装置は、アイソレータ内に充填領域および打栓領域を備えると共に、各領域にはスリーブスーツで関節が気密に覆われた多関節の作業ロボットが設置され、その作業ロボットにより各領域間でデバイスが移送される。そのため、薬剤充填処理および打栓処理に人が関与する必要がないので、高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、作業ロボットによるデバイスの移送はピックアンドプレイスで行われることとなるため、ベルトコンベア等で移送する場合におけるデバイスの転倒や破損が生じない。また、多関節ロボットが用いられていることから、デバイス形状や作業内容に応じて容易にその姿勢を制御できる。しかも、作業ロボットは、アーム先端部が露出させられているが、関節はスリーブスーツによって気密に覆われているので、その関節等からの発塵によるアイソレータ内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液が作業ロボットに付着してこれを腐食させることが抑制される。また、アイソレータ内で過酸化水素ガス等によって除染処理を施す際にも、スリーブスーツによって腐食性の強い過酸化水素ガス等から作業ロボットが保護されるので、安定的に医薬品を製造することができる。
【0013】
また、上記のようなアイソレータ内に作業ロボットを配置した医薬品の製造装置では、洗浄・滅菌装置と充填装置とを何れも一室に設けることができるため、充填工程の無菌管理が容易になると共に、薬剤が外部に暴露しない環境管理が容易になる利点がある。また、アイソレータで物理的に分離することによって管理環境を機械設備の必要部分に限定できることから、低温等の特殊環境の形成や管理も容易になるため、例えば10(℃)以下、例えば2〜3(℃)程度の低温環境が要求されるバイオ製剤にも容易に対応できる利点もある。
【0014】
また、可動範囲の広い多関節の作業ロボットが用いられることから、その可動範囲内であれば各工程装置の処理ユニットの配置の自由度が高くなる。そのため、処理ユニットの追加や変更が容易になる利点もある。
【0015】
ここで、好適には、前記医薬品の製造装置は、複数個の前記デバイスを個々に分離するための仕切を有する整列保持具によりそれらデバイスを倒立状態で保持して滅菌処理を施すものである。このようにすれば、滅菌処理の際には複数個のデバイスが個々に分離した状態で保持されることから、滅菌処理中にデバイスが相互に接触して破損することが抑制される。すなわち、従来の滅菌装置では、入口側からデバイスを順次に送り入れ、そのデバイスで先に入れたデバイスを出口側に向かって押すことで滅菌装置内で入口から出口に向かって移動させる。そのため、デバイスが押されて倒れ或いは接触して破損する問題があった。上記態様によれば、このような滅菌装置内での搬送に起因するデバイスの破損が好適に抑制される利点がある。しかも、倒立状態で保持されることから、デバイス内表面への異物の付着や混入が抑制され、蒸気滅菌時の凝縮水や、滅菌処理に先立って洗浄処理が行われる場合の洗浄水等がデバイス内表面に溜まりにくい利点もある。
【0016】
また、好適には、前記作業ロボットは、プログラム制御によりその動作を変更し得るものである。このようにすれば、作業ロボットの動きをデバイスの形状や大きさ等に応じて適切な動作に変更することができる。すなわち、ラインの組み替え等を何ら行うことなく、複数種類の薬剤やデバイスに対応でき、しかも、多品種・小ロットの生産にも容易に対応できる利点がある。
【0017】
また、好適には、前記作業ロボットは、アーム先端部のハンドが交換可能に設けられ、予めアイソレータ内に用意された複数種類のハンドの中からプログラム制御に従いデバイスの形状や大きさ等に応じて適切なハンドに交換するものである。このようにすれば、作業内容に応じたハンドに取り換えることによって、一層多数種類のデバイスに対応できる利点がある。
【0018】
また、好適には、前記医薬品の製造装置において、前記複数の作業ロボットは前記アーム先端部のハンドが交換可能に設けられ且つ洗浄用ハンドを装着して隣接する作業ロボット相互の洗浄処理が可能とされたものである。このようにすれば、アーム先端部のハンドを付け替えることで作業ロボット相互に洗浄処理を行い得ることから、作業ロボットがそのアームを適宜動かしながら洗浄することにより、安全且つ容易に隅々まで洗浄することが可能となる。また、この結果、その場での定置洗浄処理(washing in place)が可能であり、洗浄処理を随時行うことによって一層清浄な状態に保ち得る利点がある。なお、ハンドを交換することなく、洗浄用ノズルをハンドで保持して洗浄処理を行うこともできる。
【0019】
因みに、アイソレータ内およびアイソレータ内に設置される機器の洗浄処理や失活処理は、一般に、アイソレータの窓に備えられたグローブで内部に備えられた洗浄機等を操作し或いは内部に固定されたシャワーにより行われている。しかしながら、洗浄機を操作する方法では洗浄漏れが生じ易く、しかも、グローブの取り付け部分等の破れによるリークの危険がある。また、固定シャワーによる方法では陰になる部分の洗浄が困難である。上記態様によれば、これらの不都合が解消されると共に、失活処理や洗浄処理の際に人が関わる必要がないので、高活性医薬品であっても安全性が一層高められる利点がある。
【0020】
また、好適には、前記スリーブスーツは、前記作業ロボットのうち前記アーム先端部およびその先端部に取り付けられたハンド以外の残部全体を覆うものである。スリーブスーツは作業ロボットに無菌性・無塵性・耐水性・耐薬品性を与えるために設けられるので、可動部分である関節だけでなく、その全体からの発塵等が防止され且つその全体が保護されることが望ましい。
【0021】
また、好適には、前記作業ロボットは6軸以上を備えたものである。一層好適には、作業ロボットは7軸若しくはそれ以上を備える。軸数すなわち自由度が高いほど狭い範囲で柔軟な動作が可能になることから、デバイスに接近して設置できる。そのため、作業ロボットを含めた製造装置全体の占有面積を小さくすることができ、特に、無菌環境を形成するためのアイソレータを小型化できる利点がある。
【0022】
また、好適には、前記デバイスは、硼珪酸ガラス等のガラス製または環状オレフィンコポリマー(COC)や環状オレフィンポリマー(COP)等の樹脂製のバイアルまたはシリンジである。本発明は、容器の材質や形状を問わず種々の医薬品の製造装置に適用されるが、前述したように高活性の医薬品であっても、安全且つ安定的に製造できる利点があることから、ガラスバイアル、樹脂バイアル、樹脂シリンジ等に薬剤が充填された抗がん剤やバイオ製剤等の製造に好適である。
【0023】
また、好適には、本発明の医薬品の製造装置は、デバイスの内外を洗浄する洗浄機と、その洗浄機にデバイスを供給する供給装置と、前記整列保持具に洗浄済の前記デバイスを倒立状態で並べる整列装置と、前記整列保持具により保持されたデバイスに滅菌処理を施すための前記滅菌装置と、前記充填装置と、前記打栓装置と、デバイスにキャップシールを被せてこれを密着させる巻締め装置と、デバイス外部に付着した薬剤を洗い流す外洗装置とを、含むものである。
【0024】
また、滅菌装置は、例えば、入口から出口に向かってコンベア装置で整列保持具を送るトンネル型である。
【0025】
また、前記医薬品はガラスバイアル製剤であって、前記滅菌装置は乾熱滅菌を行うものである。
【0026】
また、前記医薬品は樹脂バイアルであって、前記滅菌装置は蒸気滅菌を行うものである。
【0027】
また、前記医薬品は樹脂シリンジであって、前記滅菌装置は蒸気滅菌を行うものであり、前記医薬品の製造装置は、滅菌処理を施した樹脂シリンジの内面にシリコーンを塗布するシリコーン塗布装置と、トップキャップを打栓するキャップ打栓装置と、薬液が充填されたシリンジにガスケットを打栓するガスケット打栓装置とを備えたものである。
【0028】
また、好適には、前記整列装置は多関節の作業ロボットによって前記整列保持具に前記デバイスを倒立状態で並べるものである。
【0029】
また、本発明は、移送や薬剤充填に多関節ロボットが用いられることから、プログラム変更によって処理工程を組み替えが容易であるため、多品種に対応可能であり、粉剤、液剤、粉剤+液剤等の種々の形態の薬剤に適用できる。
【0030】
また、プログラム変更により、容器反転等、姿勢制御が容易になるので、搬送中の異物混入防止、洗浄水の排出等が容易である。
【図面の簡単な説明】
【0031】
【図1】本発明の一実施例の医薬品製造装置の全体構成を説明する平面図である。
【図2】図1の医薬品製造装置に備えられたロボットの構成を説明する図である。
【図3】デバイスに滅菌処理を施す際に用いられるネストを示す図である。
【図4】図3のネストにバイアルが倒立状態で並べられた状態を示す図である。
【図5】図1の医薬品製造装置に設けられた薬液充填装置周辺を拡大して示す平面図である。
【図6】受渡しステーションでデバイスを移送する際のロボットの動作を説明する図である。
【図7】図5の薬液充填装置で用いられるハイブリッド充填方式を説明する図である。
【図8】図1の医薬品製造装置におけるアイソレータの設置状態を説明する図である。
【図9】スリーブスーツを装着したロボットを示す図である。
【図10】洗浄時のロボットの動作を説明する図である。
【発明を実施するための形態】
【0032】
以下、本発明の一実施例を図面を参照して詳細に説明する。なお、以下の実施例において図は適宜簡略化或いは変形されており、各部の寸法比および形状等は必ずしも正確に描かれていない。
【0033】
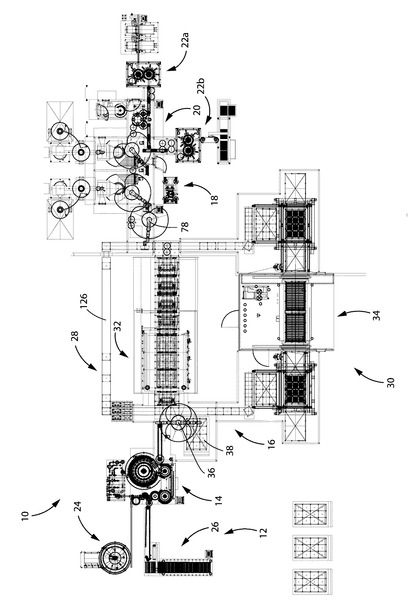
図1は一実施例の医薬品製造装置10の全体構成を平面視にて示す図である。この医薬品製造装置10は、例えば、無菌環境下でバイアルやシリンジ等のデバイス76(後述する図4参照)に抗がん剤等の薬剤を充填して医薬品を製造するために用いられる。図1において、医薬品製造装置10は、デバイス供給装置12と、洗浄機14と、滅菌装置16と、充填装置18と、打栓装置20と、外洗浄装置22とを一室に備えている。
【0034】
上記のデバイス供給装置12は、バイアルやシリンジ等のデバイス76を洗浄機14に1個ずつ順次に供給するためのもので、例えば、ガラス製や樹脂製のバイアルを供給するためのバイアル供給機24や、樹脂製のシリンジを供給するためのシリンジ供給機26等から構成されている。何れもデバイス76が複数個ずつ取り出されてコンベア装置にて洗浄機14に向かって移送される。
【0035】
また、前記の洗浄機14は、デバイス供給装置12から供給されたデバイス76を洗浄するためのもので、例えば個別式の超音波洗浄機にて構成されている。デバイス76は回転する洗浄機14にて送られつつ洗浄される。このような超音波式の洗浄機14によれば、洗浄中におけるデバイス76への物理的衝撃が緩和されるので表面傷などが抑制され、後の滅菌処理の際の破瓶リスクが低減される。
【0036】
また、前記の滅菌装置16は、洗浄済のデバイス76に滅菌処理を施すためのもので、例えば、ガラス製デバイスに滅菌処理を施すための乾熱滅菌機28と、樹脂製デバイスに滅菌処理を施すためのオートクレーブ(すなわち蒸気滅菌機)30とから成る。乾熱滅菌機28およびオートクレーブ30は、それぞれトンネル型の滅菌室32,34を備えており、デバイス76にはそのトンネル型の滅菌室32(或いは34)内をコンベア等にて搬送される過程で滅菌処理が施される。この滅菌室の搬送方向の長さ寸法は、デバイス76が急熱・急冷されることのないように定められており、デバイス76は例えば100本/分程度の速度で搬送される。
【0037】
また、上記洗浄機14と滅菌装置16との間には、ロボット36が備えられている。このロボット36は洗浄機14から送り出されたデバイス76を側方に用意されているネスト38に入れるためのもので、デバイス76はそのネスト38に並べられた状態で、例えばベルトコンベアによって滅菌装置16へ送られる。ロボット36の旋回範囲は図示のように周方向の一箇所が凹んだ略円形を成している。本実施例ではロボット36が整列装置に、ネスト38が整列保持具にそれぞれ相当する。
【0038】
図2は、上記ロボット36を示す側面図である。このロボット36は7軸すなわち7自由度を有するもので、各軸は基台40側から順に以下のようになっている。第1軸42はロボット36の体全体を基台40に垂直な軸心周りに回転させるための体旋回軸である。第2軸44は体を前後に動かすための下腕46を水平且つ体旋回軸に対して垂直な軸心周りすなわち前後に傾動させる前後傾動軸である。第3軸48は下腕46の軸心周りに肘50をねじるためのねじり回転軸である。第4軸52は上腕54を下腕46の軸心に垂直な軸心周りすなわち上下に動かす上下傾動軸である。第5軸56は上腕54の軸心周りに腕58を回転させるための手首旋回軸である。第6軸60は上腕54の軸心に垂直な軸心周りに手首62を上下動させる手首傾動軸である。第7軸64は手首62を回転させる手首回転軸である。この手首62の回転により先端部に取り付けられたハンド66が回転させられることになる。このような7軸ロボット36によれば、肘動作すなわちハンド66の位置を変えないまま肘50の角度だけを変更する動きが可能であるため、従来の6軸ロボットに比較して省スペースで同等の動作が可能である。
【0039】
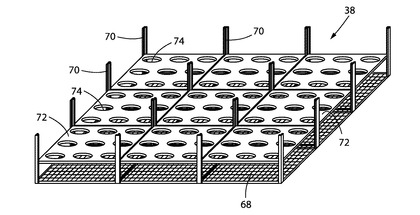
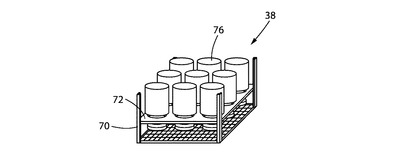
また、前記のネスト38は、図3に示されるように、金網68上に多数の支柱70が立設されると共に、それら支柱70の高さ方向の中間部に支持板72が取り付けられたものである。支持板72には厚み方向に貫通する円形孔74が多数備えられている。支持板72は仕切り板として機能するもので、この円形孔74は例えばデバイス76を個々に分離し且つ倒立状態で支持できるように設けられており、例えばバイアルの首の外径よりもやや大きい直径を有する。このネスト38では縦横各9列に円形孔74が設けられており、1個のネスト38で81個のバイアルを並べて搬送できるようになっている。図4にネスト38の一部をバイアルすなわちデバイス76が並べられた状態で示す。
【0040】
本実施例においては、デバイス76は、上記のようなロボット36により、1個ずつ或いは複数個ずつまとめて洗浄機14の出口から拾い上げられてネスト38に入れられ、図4に示すようにそのネスト38に並べられた後、その状態で滅菌装置16に送られることになる。すなわち、デバイス76はロボット36を用いたピックアンドプレイスによって移送される。そのため、洗浄機14から滅菌装置16へ送られる過程やその滅菌装置16で滅菌処理される過程においても、デバイス76相互の接触や機械装置の接触等によるデバイス76への物理的衝撃が緩和されるので、破瓶リスクが一層低くなる。
【0041】
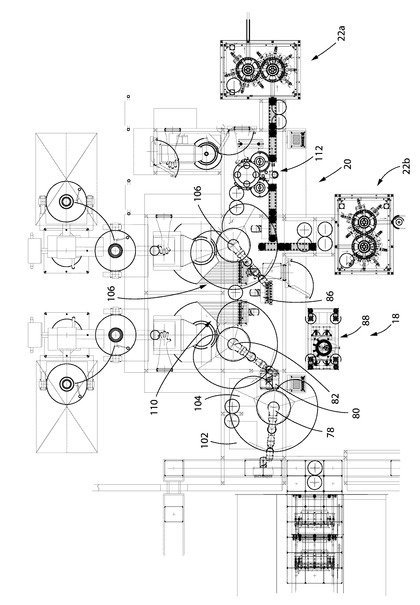
図1に戻って、前記の充填装置18は、滅菌処理が施されたデバイス76に薬剤を充填するためのものである。滅菌装置16と充填装置18との間には、ロボット36と同様な7軸のロボット78が設置されており、滅菌装置16から送り出されたネスト38内のデバイス76を1本ずつ或いは複数本ずつ取り出し、充填装置18内の受渡しステーション80(図5参照)へ送るようになっている。
【0042】
図5は、充填装置18およびその周辺を拡大して示したものである。上記の受渡しステーション80はデバイス移送のための中継点で、ロボット78によってここに置かれたデバイス76は、隣に設置されたロボット82によって1個ずつ或いは複数個ずつ取り上げられ、充填ステーション86に移送され、その近傍に備えられている移動式の充填ユニット88によって、そこで薬剤が充填される。図6に上記ロボット78,82によるデバイス76の受け渡し動作の一例を示す。
【0043】
図7は上記充填装置18に採用されているハイブリッド充填方式を説明する図である。充填ステーション86(図7では省略)にはロードセル90が備えられており、その上に載せられたデバイス76の開口には薬剤供給チューブ92が位置させられている。薬剤(この図7では薬液)は図示しない貯留槽などから充填タンク(或いは薬液クッションタンク)94に注ぎ込むようになっている。充填タンク94には静電容量式等のレベルセンサ96が備えられており、そのレベルセンサ96の作動により弁98が開閉されることで、充填タンク94の液量が一定範囲に保たれるようになっている。上記チューブ92は、質量流量計100に接続されており、圧力空気或いは窒素を上方から充填タンク94内に供給することでその充填タンク94内に一時的に蓄えられた薬液が質量流量計100および薬剤供給チューブ92を介してデバイス76内に注ぎ込まれる。
【0044】
このとき、本実施例においては、上記質量流量計100による流量管理に加えて、ロードセル90によって充填重量が測定されることから、薬液の過剰充填や充填不足が好適に抑制され、充填量不良が減じられる。充填精度は、管理計器の精度はいうまでも無いが、薬液送液圧力(充填タンク94の加圧圧力すなわちタンク加圧圧力)と充填タンク94の液面レベル(すなわちタンク液面レベル)の管理により達成する。
【0045】
生産中は、液面レベルが適正に制御され、これに対応したタンク加圧により充填され、薬液の状態もほぼ気泡の噛み込み等も無く、質量流量計100による充填精度管理を行うことができる。すなわち、質量流量計100による流量管理は連続的にデバイス76に薬液を充填する間は高精度を期待できる。生産終了間近では、充填タンク94内の薬液は減る方向となり、新たな薬液供給が行われないため、適正な液面レベルを維持することが困難となる。すなわち、充填終了時には液流が安定しないため精度が低下する。充填開始時も同様である。これに対して、ロードセル90による重量管理では液流が不安定でも測定精度に影響が生じないが、薬液が高速で充填されると反応の遅れがあるので一定充填量を得ることが困難である。そこで、これらを併用して、例えば充填開始時や充填終了時にはタンク加圧圧力を下げて流速を下げ、ロードセル90によって充填重量を測定しながら充填バルブを制御することにより、充填時間が長くなるが充填量不良を減らすことができる。安定稼働時には質量流量計100によって充填量を管理する。このようにして、質量流量計100のみの管理に比べて薬液ロスが減じられることになる。
【0046】
なお、質量流量計100では気泡の噛み込みにより測定精度に影響を及ぼすが、ロードセル90の場合、重量管理のため液の状態に依存しない利点がある。また、安定稼働時には質量流量計100のみでも差し支えないが、本実施例ではロードセル90による測定を継続することにより、測定の信頼性が高められている。
【0047】
図5に戻って、受渡しステーション80の近傍には、シリコーン塗布ステーション102および口欠け検査ステーション104が備えられている。シリコーン塗布ステーション102は、取り扱われるデバイス76がシリンジである場合に、その内面にシリコーンを塗布するためのものである。また、口欠け検査ステーション104は、取り扱われるデバイス76がガラス製バイアル等のガラス製デバイスである場合に口欠けの有無を検査するためのものである。本実施例の医薬品製造装置10では、デバイス76の相互接触や装置との接触が抑制されているため、破瓶リスクが抑制されると共に口欠け等も生じ難くなっているが、この段階で口欠けを更に検査することで、不良品の発生可能性を一層減じている。
【0048】
また、充填装置18に隣接して備えられた前記の打栓装置20は、薬剤が充填されたデバイス76に打栓して密閉容器を形成するためのものである。打栓装置20にもロボット106が設置されており、充填ステーション86において薬剤が充填されたデバイス76を取り上げて打栓機108まで移動させ、例えば保持したままこれにゴム栓等を打栓する。なお、打栓機108の左側にはトップキャップ打栓機110が備えられているが、これはデバイス76がシリンジである場合に、薬剤充填前にそのトップキャップを打栓するためのものである。また、シリンジを処理する場合には、上記打栓機108はシリンジ後端からガスケットを押し込むガスケット打栓機として機能することになる。
【0049】
また、上記打栓装置20には、打栓機108に隣接してキャップ巻締め機112が備えられている。キャップ巻締め機112は、デバイス76がバイアルである場合に、これにゴム栓が施された後、開口の外周側からキャップを巻き締めするためのものである。
【0050】
また、前記の外洗浄装置22は、上記のようにしてデバイス76に薬剤が充填され且つ打栓(およびキャップ巻き締め)されることによって密閉容器が形成された後、その密閉容器の外表面を洗浄するためのものである。外洗浄装置22は、上記キャップ巻締め機112に連なるバイアル用外洗装置22aと、図5における打栓機108の下方位置に備えられたシリンジ用外洗装置22bとから成る。これら2つの外洗装置22a、22bは、取り扱われるデバイスに応じて使い分けられる。何れも陰圧ボックスを備えたもので、密閉容器となったデバイス76を減圧下で洗浄して集積装置に送るようになっている。
【0051】
ところで、本実施例の医薬品製造装置10においては、前記の充填装置18およびその周辺装置は、図8に示されるようにアイソレータ114によって囲まれている。理解が容易なようにアイソレータ114が設けられている範囲を一点鎖線116で囲んで示す。アイソレータ114は、充填装置18、打栓装置20、トップキャップ打栓機110、巻締め機112、オートクレーブ30の出口外側を囲む位置に設けられている。すなわち、充填装置18が備えられた充填領域128と、打栓装置20が備えられた打栓領域130とを含む範囲にアイソレータ114が設けられている。乾熱滅菌機28およびオートクレーブ30との間や外洗浄装置22との間には入口シャッタ132,出口シャッタ134,136等が備えられており、アイソレータ114内を無菌環境とする際に、それらシャッタ132〜136等が閉じられることで外界から遮断され、密閉空間が形成される。これら入口シャッタ132,出口シャッタ134,136がアイソレータの開閉可能な入口および出口にそれぞれ相当する。なお、無菌環境の形成は、例えば、内部に過酸化水素水を送り込んで蒸発させることにより行われる。
【0052】
また、上記のアイソレータ114には、複数箇所において内部空間に向かって伸びるグローブ118が備えられている。このグローブ118も密閉空間を形成するための境界の一部を成しており、アイソレータ114の壁面に気密に取り付けられている。グローブ118は、アイソレータ114内に送り込まれたゴム栓を所定位置に供給するなど、手作業が必要な場合に随時用いられる。
【0053】
なお、ロボット78,82はその旋回範囲がアイソレータ114の外側にまで広がるように描かれているが、これはロボット自体の仕様を示したもので、アイソレータ114内に設置された状態では、その壁面に干渉しない範囲で作動させられる。アイソレータ壁面との干渉によりロボット78,82の旋回可能範囲が狭くなっている部分もあるが、本実施例においては前述したように7自由度のロボットが用いられていることから、旋回に何ら支障はない。
【0054】
また、図1〜図8では省略しているが、上記のようにアイソレータ114内に設置されたロボット78,82、106には、図9に示すように、スリーブスーツ120が装着されている。スリーブスーツ120は、例えば、PVC(ポリ塩化ビニル)、PTFE(ポリテトラフルオロエチレン)、PFA(テトラフルオロエチレン・パーフルオロアルキルビニルエーテル共重合体)等から成る筒状を成すもので、先端側がアーム先端部すなわち手首62近傍においてパッキング等を介して密接して取り付けられると共に、基台40側もロボット78等が設置された装置上面にパッキング等を介して密接して取り付けられており、内部に気密空間を有する。なお、上記PVC等は、過酸化水素に耐性があり、且つロボット動作時に可動負荷にならない程度の柔軟性を有する樹脂材料である。ロボット78等は、このように気密且つ高い耐食性を有するスリーブスーツ120によって、ハンド66および手首62近傍を除く大部分が覆われた状態にある。ロボット78等は、ハンド66と露出した手首62近傍とが耐食性の高いSUS316Lで構成されるが、その他の部分は全て表面に樹脂コートされたスチールで構成されており、耐食性を有さない。そのため、アイソレータ114内で露出状態にあると、無菌環境を形成するために過酸化水素ガスが発生させられる際に腐食させられ、或いは内部の洗浄時に洗浄液で腐食させられ、また、関節等の可動部の摩耗粉などがアイソレータ114内に入ることになるが、本実施例によれば、上記のようにスリーブスーツ120を装着していることから、これらの問題が全て回避されている。
【0055】
また、前記のロボット78等のハンド66は、用途に応じて複数種類の中から適宜選択して交換可能になっている。このハンド66の交換は、例えば予め記憶されたプログラムに従い、自動的に行わせることができる。図10に、ハンド66がスプレーガン124に取り替えられた使用態様を示す。この使用態様では、ロボット78は自らの足下近傍を洗浄中であり、ロボット82はロボット78を洗浄中である。ロボット78等は7軸を有して動きの自由度が極めて高いことから、このように洗浄処理においても、柔軟に動きながら万遍なく洗浄することができる。そのため、本実施例のようにアイソレータ114内に設置されている場合においても、人手を煩わせることなく、安全且つ確実に洗浄して、清浄度の高い無菌室を維持できる利点がある。なお、図10においては省略されているが、アイソレータ114内に備えられたロボット78等は前記スリーブスーツ120を装着しており、洗浄処理はその装着状態で行われる。そのため、付着した薬剤等が容易に洗い流されるので洗浄が簡単になる利点もある。
【0056】
以上のように構成された医薬品製造装置10によれば、バイアル製剤等の医薬品を製造するに際しては、例えばガラス製バイアルが前記デバイス供給装置12から洗浄機14に供給されると、これに洗浄処理が施される。洗浄されたバイアルは、次いで、ロボット36によってネスト38に倒立状態で入れられてベルトコンベア等で滅菌装置16に送られ、乾熱滅菌処理(樹脂製バイアルの場合は蒸気滅菌処理)が施される。乾熱滅菌を終えて滅菌装置16のトンネルから送り出されたバイアルは、ネスト38に入れられたまま、予め除染処理が施されることで無菌環境が形成され且つ陰圧にされたアイソレータ114内に送り込まれ、更に、ロボット78の近傍まで送られ、例えば複数本ずつ取り出されて受渡しステーション80を経て充填ステーション86に送られる。なお、バイアルが全て取り出されたネスト38は、リターンコンベア126(図1参照)を通ってロボット36の近傍まで戻される。
【0057】
充填ステーション86に送られたバイアルには、予め定められた適量の薬剤(例えば抗がん剤等の薬液)が充填され、打栓装置20にてゴム栓で封止され、更にキャップ巻締め機112でキャップが巻き締めされた後、アイソレータ114から送り出され、外洗浄装置22によって外部に付着した薬剤が洗い流され、トレイなどに集積される。
【0058】
このように、本実施例によれば、アイソレータ114内に充填装置18および打栓装置20等が備えられると共に、各装置に対してスリーブスーツ120で先端部を除いて気密に覆われて保護されたロボット78,82等が設置され、それらロボット78,82等でデバイス76が移送される。そのため、薬剤充填および打栓処理に人が関与する必要が無いので、抗がん剤のような高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、ロボット78,82等によるデバイス76の移送はピックアンドプレイスで行われるため、ベルトコンベア等で移送する場合におけるデバイス76の転倒や破損が生じない。また、7自由度の多関節ロボットが用いられていることから、デバイス形状や作業内容に応じて容易にその姿勢を制御できる。しかも、ロボット78,82等は、先端部が露出させられているが、関節を含むそれよりも基台40側はスリーブスーツ120によって気密に覆われているので、その関節等からの発塵によるアイソレータ114内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液がロボット78,82等に付着してこれを腐食させることが抑制される。また、アイソレータ114内で過酸化水素ガス等によって除染処理を施す際にも、スリーブスーツ120によって腐食性の強い過酸化水素ガス等からロボット78,82等が保護されるので、安定的に医薬品を製造することができる。
【0059】
また、本実施例によれば、デバイス76が相互に分離した状態でネスト38に倒立させられた状態で移送されることから、蒸気滅菌の際の付着水等が容易に排出されると共に、内部に異物が入ることが一層抑制される利点がある。
【0060】
また、本実施例においては、7軸のロボット36,78等が用いられていることから、従来から広く用いられている6軸ロボットが用いられる場合に比較して、周辺設備や他のロボット等との干渉を避けるために必要な空間が小さくなる。しかも、ハンド66の回り込み姿勢ができることから、ロボット36,78等をデバイス76等の上方を含む近接位置に設置できるので、一層コンパクトなラインになっている利点もある。また、上述したようにロボット36,78等は動きの自由度が高いため、処理ユニットの配置の自由度が高く、追加や変更が容易な利点もある。
【0061】
また、本実施例によれば、ロボット36,78等でデバイス76が移送されることから、ベルトコンベア等で搬送する場合のデバイス76の底部や側面の摩擦が無い利点もある。
【0062】
また、デバイス76の移送にはネスト38が用いられることから、搬送中のベルトとデバイス76との摩擦が生じないので、発塵要素が一層減じられる利点もある。この結果、デバイス76への異物付着も減り、次工程へ前工程の異物(汚染源)持込の確率も減る利点がある。
【0063】
また、アイソレータ114の内外境界部において、ロボット78等によるピックアンドプレイスでデバイス76が移送されることから、受け渡し専用エリアが形成されることとなるので、前工程の搬送機構への直接接触が避けられ、前工程から次工程へ、異物を持ち込む確率が減る利点もある。
【0064】
以上、本発明を図面を参照して詳細に説明したが、本発明は更に別の態様でも実施でき、その主旨を逸脱しない範囲で種々変更を加え得るものである。
【符号の説明】
【0065】
10:医薬品製造装置、12:デバイス供給装置、14:洗浄機、16:滅菌装置、18:充填装置、20:打栓装置、36:ロボット、38:ネスト、76:デバイス、78:ロボット、114:アイソレータ、120:スリーブスーツ
【技術分野】
【0001】
本発明は、薬剤をデバイスに充填して医薬品を製造するための装置に関し、特に、抗がん剤やバイオ製剤などの高活性医薬品を安全且つ安定的に生産することが可能な製造装置に関する。
【背景技術】
【0002】
薬液をガラス製或いは樹脂製のシリンジに充填して封止したプレフィルドシリンジ(プレフィルド製剤ともいう)や、バイアルに薬剤を充填して封止したバイアル製剤等、薬剤をガラス製や樹脂製のデバイスに充填した医薬品が知られている。このような医薬品の製造は、シリンジやバイアル等のデバイスを用意し、例えば、クリーンルーム内若しくは無菌室内に設置された密閉型ラミナーブースにおいて以下のようにして行われる。
【0003】
まず、用意されたデバイスに洗浄処理を施し、次いで、滅菌処理を施す。一般に、ガラス製デバイスに対しては乾熱滅菌処理が行われ、樹脂製デバイスに対しては蒸気滅菌処理が行われる。次いで、このデバイスに所定量の薬剤を充填し、開口を打栓して塞ぎ、必要に応じてキャップシールを被せてこれを密着させる。この後、デバイス外部に付着した薬剤が洗い流され、トレイ等に集積されて検査工程に送られる。
【0004】
上記のようにして医薬品を製造するに際して、各処理工程或いは各処理領域に設けられたステーションへのデバイスの移送は、ベルトコンベアに乗せ、或いは、摩擦係数の小さい平坦な台上にデバイスを順次に乗せて後工程に向かって押し出す等で行われていた。しかしながら、このような移送方法では、ベルトコンベアの振動やデバイスと台との摩擦などに起因してデバイスが倒れ、或いはデバイスが相互にぶつかることで破損し易い問題がある。
【0005】
これに対して、デバイスの整列供給工程、薬剤充填工程、および施栓工程の各工程間のデバイスの受け渡しを工程間に配設したロボットで行う薬液充填施栓システムが提案されている(例えば、特許文献1を参照。)。この薬液充填施栓システムは、デバイスの形状や大きさ等に合わせてロボットをプログラム制御することにより、1ラインで種々のデバイスに対応できるようにしたものである。また、多関節ロボットを用いることで次工程の作業に適した姿勢でデバイスの受け渡しを行い得ると共に、デバイスを保持するためにロボットに取り付けられるチャックがデバイスの形状に合わせて交換可能になっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2003−104324号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、抗がん剤やバイオ製剤等の高活性医薬品を製造するに際しては、薬剤充填工程を周囲環境から物理的に隔離する目的でアイソレータ(すなわち無菌室)が用いられる。アイソレータを備えた製造装置では、アイソレータを気密に閉じて過酸化水素ガス等で除染処理を施し、アイソレータ内と室内に圧力差を設けてその管理環境下でデバイスの投入や製剤の充填が行われる。室内への漏洩リスク軽減を図る場合にはアイソレータ内を陰圧にし、また、外部からの侵入防止を重視する場合にはアイソレータ内を陽圧にすることにより、各々の必要環境に対応した環境を形成する。このようにして製造される高活性医薬品は、薬剤に触れると人体に影響があり、しかも、ベルトコンベア等を用いた移送方法でデバイスが移送中に倒れて破損すると高価な薬剤の損失が大きい。そこで、高活性医薬品を安全且つ安定的に生産できるように、前記特許文献1に記載されるような薬液充填施栓システムを採用し、薬剤が取り扱われる充填・施栓処理をロボットで行うことが考えられる。
【0008】
また、前記特許文献1に記載された薬液充填施栓システムなど、従来の医薬品製造装置では、デバイスの洗浄および滅菌処理室と充填室(無菌室)とが別々に設けられていたが、上記のようなアイソレータを備えることにより、洗浄・滅菌室と充填室との隔壁を無用として、一室内に各装置を設置できる。この結果、無菌管理および薬剤の外部への暴露が生じない環境管理を行い得る。しかも、環境管理を室単位ではなく機械設備の必要部分に限定できるので、バイオ製剤等のための低温等の特殊環境の形成や管理が容易になる。
【0009】
しかしながら、上記ロボットをアイソレータ内に設置した場合、ロボットからの発塵を避けられないため無菌環境の形成が困難になる。また、薬剤は腐食性を有するものも多いため、その飛沫でロボットが腐食し得る。付着した薬剤は洗浄除去されるが、ロボットはその洗浄液によっても腐食させられる。しかも、無菌環境を形成するための過酸化水素ガス等は強い腐食性を有するため、除染処理の際にもロボットが腐食し得る。このため、これらに対して何ら対処することなく前記特許文献1に記載されたロボットを製造工程に適用しても、工程の安定性に欠ける問題がある。
【0010】
本発明は、以上の事情を背景として為されたものであって、その目的は、デバイスに薬剤が充填された高活性医薬品を安全且つ安定的に生産することのできる医薬品の製造装置を提供することにある。
【課題を解決するための手段】
【0011】
斯かる目的を達成するため、本発明の要旨とするところは、洗浄処理および滅菌処理を施したデバイスに薬剤を充填して打栓することにより医薬品を製造するための製造装置であって、(a)滅菌処理済のデバイスの入口および出口を開閉可能に備えたアイソレータと、(b)前記デバイスに薬剤を充填するために前記アイソレータ内に設けられた充填領域と、(c)前記薬剤が充填されたデバイスに打栓するために前記アイソレータ内に設けられた打栓領域と、(d)前記アイソレータ内において前記各領域にそれぞれ設置されると共に少なくともアーム先端部を露出させた状態でスリーブスーツによって関節が気密に覆われ且つ前記各領域間で前記デバイスを移送する多関節の複数の作業ロボットとを、含むことにある。
【発明の効果】
【0012】
このようにすれば、医薬品の製造装置は、アイソレータ内に充填領域および打栓領域を備えると共に、各領域にはスリーブスーツで関節が気密に覆われた多関節の作業ロボットが設置され、その作業ロボットにより各領域間でデバイスが移送される。そのため、薬剤充填処理および打栓処理に人が関与する必要がないので、高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、作業ロボットによるデバイスの移送はピックアンドプレイスで行われることとなるため、ベルトコンベア等で移送する場合におけるデバイスの転倒や破損が生じない。また、多関節ロボットが用いられていることから、デバイス形状や作業内容に応じて容易にその姿勢を制御できる。しかも、作業ロボットは、アーム先端部が露出させられているが、関節はスリーブスーツによって気密に覆われているので、その関節等からの発塵によるアイソレータ内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液が作業ロボットに付着してこれを腐食させることが抑制される。また、アイソレータ内で過酸化水素ガス等によって除染処理を施す際にも、スリーブスーツによって腐食性の強い過酸化水素ガス等から作業ロボットが保護されるので、安定的に医薬品を製造することができる。
【0013】
また、上記のようなアイソレータ内に作業ロボットを配置した医薬品の製造装置では、洗浄・滅菌装置と充填装置とを何れも一室に設けることができるため、充填工程の無菌管理が容易になると共に、薬剤が外部に暴露しない環境管理が容易になる利点がある。また、アイソレータで物理的に分離することによって管理環境を機械設備の必要部分に限定できることから、低温等の特殊環境の形成や管理も容易になるため、例えば10(℃)以下、例えば2〜3(℃)程度の低温環境が要求されるバイオ製剤にも容易に対応できる利点もある。
【0014】
また、可動範囲の広い多関節の作業ロボットが用いられることから、その可動範囲内であれば各工程装置の処理ユニットの配置の自由度が高くなる。そのため、処理ユニットの追加や変更が容易になる利点もある。
【0015】
ここで、好適には、前記医薬品の製造装置は、複数個の前記デバイスを個々に分離するための仕切を有する整列保持具によりそれらデバイスを倒立状態で保持して滅菌処理を施すものである。このようにすれば、滅菌処理の際には複数個のデバイスが個々に分離した状態で保持されることから、滅菌処理中にデバイスが相互に接触して破損することが抑制される。すなわち、従来の滅菌装置では、入口側からデバイスを順次に送り入れ、そのデバイスで先に入れたデバイスを出口側に向かって押すことで滅菌装置内で入口から出口に向かって移動させる。そのため、デバイスが押されて倒れ或いは接触して破損する問題があった。上記態様によれば、このような滅菌装置内での搬送に起因するデバイスの破損が好適に抑制される利点がある。しかも、倒立状態で保持されることから、デバイス内表面への異物の付着や混入が抑制され、蒸気滅菌時の凝縮水や、滅菌処理に先立って洗浄処理が行われる場合の洗浄水等がデバイス内表面に溜まりにくい利点もある。
【0016】
また、好適には、前記作業ロボットは、プログラム制御によりその動作を変更し得るものである。このようにすれば、作業ロボットの動きをデバイスの形状や大きさ等に応じて適切な動作に変更することができる。すなわち、ラインの組み替え等を何ら行うことなく、複数種類の薬剤やデバイスに対応でき、しかも、多品種・小ロットの生産にも容易に対応できる利点がある。
【0017】
また、好適には、前記作業ロボットは、アーム先端部のハンドが交換可能に設けられ、予めアイソレータ内に用意された複数種類のハンドの中からプログラム制御に従いデバイスの形状や大きさ等に応じて適切なハンドに交換するものである。このようにすれば、作業内容に応じたハンドに取り換えることによって、一層多数種類のデバイスに対応できる利点がある。
【0018】
また、好適には、前記医薬品の製造装置において、前記複数の作業ロボットは前記アーム先端部のハンドが交換可能に設けられ且つ洗浄用ハンドを装着して隣接する作業ロボット相互の洗浄処理が可能とされたものである。このようにすれば、アーム先端部のハンドを付け替えることで作業ロボット相互に洗浄処理を行い得ることから、作業ロボットがそのアームを適宜動かしながら洗浄することにより、安全且つ容易に隅々まで洗浄することが可能となる。また、この結果、その場での定置洗浄処理(washing in place)が可能であり、洗浄処理を随時行うことによって一層清浄な状態に保ち得る利点がある。なお、ハンドを交換することなく、洗浄用ノズルをハンドで保持して洗浄処理を行うこともできる。
【0019】
因みに、アイソレータ内およびアイソレータ内に設置される機器の洗浄処理や失活処理は、一般に、アイソレータの窓に備えられたグローブで内部に備えられた洗浄機等を操作し或いは内部に固定されたシャワーにより行われている。しかしながら、洗浄機を操作する方法では洗浄漏れが生じ易く、しかも、グローブの取り付け部分等の破れによるリークの危険がある。また、固定シャワーによる方法では陰になる部分の洗浄が困難である。上記態様によれば、これらの不都合が解消されると共に、失活処理や洗浄処理の際に人が関わる必要がないので、高活性医薬品であっても安全性が一層高められる利点がある。
【0020】
また、好適には、前記スリーブスーツは、前記作業ロボットのうち前記アーム先端部およびその先端部に取り付けられたハンド以外の残部全体を覆うものである。スリーブスーツは作業ロボットに無菌性・無塵性・耐水性・耐薬品性を与えるために設けられるので、可動部分である関節だけでなく、その全体からの発塵等が防止され且つその全体が保護されることが望ましい。
【0021】
また、好適には、前記作業ロボットは6軸以上を備えたものである。一層好適には、作業ロボットは7軸若しくはそれ以上を備える。軸数すなわち自由度が高いほど狭い範囲で柔軟な動作が可能になることから、デバイスに接近して設置できる。そのため、作業ロボットを含めた製造装置全体の占有面積を小さくすることができ、特に、無菌環境を形成するためのアイソレータを小型化できる利点がある。
【0022】
また、好適には、前記デバイスは、硼珪酸ガラス等のガラス製または環状オレフィンコポリマー(COC)や環状オレフィンポリマー(COP)等の樹脂製のバイアルまたはシリンジである。本発明は、容器の材質や形状を問わず種々の医薬品の製造装置に適用されるが、前述したように高活性の医薬品であっても、安全且つ安定的に製造できる利点があることから、ガラスバイアル、樹脂バイアル、樹脂シリンジ等に薬剤が充填された抗がん剤やバイオ製剤等の製造に好適である。
【0023】
また、好適には、本発明の医薬品の製造装置は、デバイスの内外を洗浄する洗浄機と、その洗浄機にデバイスを供給する供給装置と、前記整列保持具に洗浄済の前記デバイスを倒立状態で並べる整列装置と、前記整列保持具により保持されたデバイスに滅菌処理を施すための前記滅菌装置と、前記充填装置と、前記打栓装置と、デバイスにキャップシールを被せてこれを密着させる巻締め装置と、デバイス外部に付着した薬剤を洗い流す外洗装置とを、含むものである。
【0024】
また、滅菌装置は、例えば、入口から出口に向かってコンベア装置で整列保持具を送るトンネル型である。
【0025】
また、前記医薬品はガラスバイアル製剤であって、前記滅菌装置は乾熱滅菌を行うものである。
【0026】
また、前記医薬品は樹脂バイアルであって、前記滅菌装置は蒸気滅菌を行うものである。
【0027】
また、前記医薬品は樹脂シリンジであって、前記滅菌装置は蒸気滅菌を行うものであり、前記医薬品の製造装置は、滅菌処理を施した樹脂シリンジの内面にシリコーンを塗布するシリコーン塗布装置と、トップキャップを打栓するキャップ打栓装置と、薬液が充填されたシリンジにガスケットを打栓するガスケット打栓装置とを備えたものである。
【0028】
また、好適には、前記整列装置は多関節の作業ロボットによって前記整列保持具に前記デバイスを倒立状態で並べるものである。
【0029】
また、本発明は、移送や薬剤充填に多関節ロボットが用いられることから、プログラム変更によって処理工程を組み替えが容易であるため、多品種に対応可能であり、粉剤、液剤、粉剤+液剤等の種々の形態の薬剤に適用できる。
【0030】
また、プログラム変更により、容器反転等、姿勢制御が容易になるので、搬送中の異物混入防止、洗浄水の排出等が容易である。
【図面の簡単な説明】
【0031】
【図1】本発明の一実施例の医薬品製造装置の全体構成を説明する平面図である。
【図2】図1の医薬品製造装置に備えられたロボットの構成を説明する図である。
【図3】デバイスに滅菌処理を施す際に用いられるネストを示す図である。
【図4】図3のネストにバイアルが倒立状態で並べられた状態を示す図である。
【図5】図1の医薬品製造装置に設けられた薬液充填装置周辺を拡大して示す平面図である。
【図6】受渡しステーションでデバイスを移送する際のロボットの動作を説明する図である。
【図7】図5の薬液充填装置で用いられるハイブリッド充填方式を説明する図である。
【図8】図1の医薬品製造装置におけるアイソレータの設置状態を説明する図である。
【図9】スリーブスーツを装着したロボットを示す図である。
【図10】洗浄時のロボットの動作を説明する図である。
【発明を実施するための形態】
【0032】
以下、本発明の一実施例を図面を参照して詳細に説明する。なお、以下の実施例において図は適宜簡略化或いは変形されており、各部の寸法比および形状等は必ずしも正確に描かれていない。
【0033】
図1は一実施例の医薬品製造装置10の全体構成を平面視にて示す図である。この医薬品製造装置10は、例えば、無菌環境下でバイアルやシリンジ等のデバイス76(後述する図4参照)に抗がん剤等の薬剤を充填して医薬品を製造するために用いられる。図1において、医薬品製造装置10は、デバイス供給装置12と、洗浄機14と、滅菌装置16と、充填装置18と、打栓装置20と、外洗浄装置22とを一室に備えている。
【0034】
上記のデバイス供給装置12は、バイアルやシリンジ等のデバイス76を洗浄機14に1個ずつ順次に供給するためのもので、例えば、ガラス製や樹脂製のバイアルを供給するためのバイアル供給機24や、樹脂製のシリンジを供給するためのシリンジ供給機26等から構成されている。何れもデバイス76が複数個ずつ取り出されてコンベア装置にて洗浄機14に向かって移送される。
【0035】
また、前記の洗浄機14は、デバイス供給装置12から供給されたデバイス76を洗浄するためのもので、例えば個別式の超音波洗浄機にて構成されている。デバイス76は回転する洗浄機14にて送られつつ洗浄される。このような超音波式の洗浄機14によれば、洗浄中におけるデバイス76への物理的衝撃が緩和されるので表面傷などが抑制され、後の滅菌処理の際の破瓶リスクが低減される。
【0036】
また、前記の滅菌装置16は、洗浄済のデバイス76に滅菌処理を施すためのもので、例えば、ガラス製デバイスに滅菌処理を施すための乾熱滅菌機28と、樹脂製デバイスに滅菌処理を施すためのオートクレーブ(すなわち蒸気滅菌機)30とから成る。乾熱滅菌機28およびオートクレーブ30は、それぞれトンネル型の滅菌室32,34を備えており、デバイス76にはそのトンネル型の滅菌室32(或いは34)内をコンベア等にて搬送される過程で滅菌処理が施される。この滅菌室の搬送方向の長さ寸法は、デバイス76が急熱・急冷されることのないように定められており、デバイス76は例えば100本/分程度の速度で搬送される。
【0037】
また、上記洗浄機14と滅菌装置16との間には、ロボット36が備えられている。このロボット36は洗浄機14から送り出されたデバイス76を側方に用意されているネスト38に入れるためのもので、デバイス76はそのネスト38に並べられた状態で、例えばベルトコンベアによって滅菌装置16へ送られる。ロボット36の旋回範囲は図示のように周方向の一箇所が凹んだ略円形を成している。本実施例ではロボット36が整列装置に、ネスト38が整列保持具にそれぞれ相当する。
【0038】
図2は、上記ロボット36を示す側面図である。このロボット36は7軸すなわち7自由度を有するもので、各軸は基台40側から順に以下のようになっている。第1軸42はロボット36の体全体を基台40に垂直な軸心周りに回転させるための体旋回軸である。第2軸44は体を前後に動かすための下腕46を水平且つ体旋回軸に対して垂直な軸心周りすなわち前後に傾動させる前後傾動軸である。第3軸48は下腕46の軸心周りに肘50をねじるためのねじり回転軸である。第4軸52は上腕54を下腕46の軸心に垂直な軸心周りすなわち上下に動かす上下傾動軸である。第5軸56は上腕54の軸心周りに腕58を回転させるための手首旋回軸である。第6軸60は上腕54の軸心に垂直な軸心周りに手首62を上下動させる手首傾動軸である。第7軸64は手首62を回転させる手首回転軸である。この手首62の回転により先端部に取り付けられたハンド66が回転させられることになる。このような7軸ロボット36によれば、肘動作すなわちハンド66の位置を変えないまま肘50の角度だけを変更する動きが可能であるため、従来の6軸ロボットに比較して省スペースで同等の動作が可能である。
【0039】
また、前記のネスト38は、図3に示されるように、金網68上に多数の支柱70が立設されると共に、それら支柱70の高さ方向の中間部に支持板72が取り付けられたものである。支持板72には厚み方向に貫通する円形孔74が多数備えられている。支持板72は仕切り板として機能するもので、この円形孔74は例えばデバイス76を個々に分離し且つ倒立状態で支持できるように設けられており、例えばバイアルの首の外径よりもやや大きい直径を有する。このネスト38では縦横各9列に円形孔74が設けられており、1個のネスト38で81個のバイアルを並べて搬送できるようになっている。図4にネスト38の一部をバイアルすなわちデバイス76が並べられた状態で示す。
【0040】
本実施例においては、デバイス76は、上記のようなロボット36により、1個ずつ或いは複数個ずつまとめて洗浄機14の出口から拾い上げられてネスト38に入れられ、図4に示すようにそのネスト38に並べられた後、その状態で滅菌装置16に送られることになる。すなわち、デバイス76はロボット36を用いたピックアンドプレイスによって移送される。そのため、洗浄機14から滅菌装置16へ送られる過程やその滅菌装置16で滅菌処理される過程においても、デバイス76相互の接触や機械装置の接触等によるデバイス76への物理的衝撃が緩和されるので、破瓶リスクが一層低くなる。
【0041】
図1に戻って、前記の充填装置18は、滅菌処理が施されたデバイス76に薬剤を充填するためのものである。滅菌装置16と充填装置18との間には、ロボット36と同様な7軸のロボット78が設置されており、滅菌装置16から送り出されたネスト38内のデバイス76を1本ずつ或いは複数本ずつ取り出し、充填装置18内の受渡しステーション80(図5参照)へ送るようになっている。
【0042】
図5は、充填装置18およびその周辺を拡大して示したものである。上記の受渡しステーション80はデバイス移送のための中継点で、ロボット78によってここに置かれたデバイス76は、隣に設置されたロボット82によって1個ずつ或いは複数個ずつ取り上げられ、充填ステーション86に移送され、その近傍に備えられている移動式の充填ユニット88によって、そこで薬剤が充填される。図6に上記ロボット78,82によるデバイス76の受け渡し動作の一例を示す。
【0043】
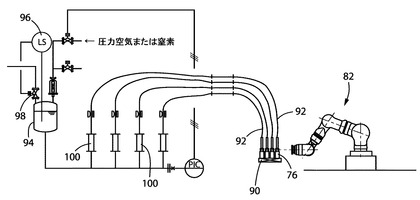
図7は上記充填装置18に採用されているハイブリッド充填方式を説明する図である。充填ステーション86(図7では省略)にはロードセル90が備えられており、その上に載せられたデバイス76の開口には薬剤供給チューブ92が位置させられている。薬剤(この図7では薬液)は図示しない貯留槽などから充填タンク(或いは薬液クッションタンク)94に注ぎ込むようになっている。充填タンク94には静電容量式等のレベルセンサ96が備えられており、そのレベルセンサ96の作動により弁98が開閉されることで、充填タンク94の液量が一定範囲に保たれるようになっている。上記チューブ92は、質量流量計100に接続されており、圧力空気或いは窒素を上方から充填タンク94内に供給することでその充填タンク94内に一時的に蓄えられた薬液が質量流量計100および薬剤供給チューブ92を介してデバイス76内に注ぎ込まれる。
【0044】
このとき、本実施例においては、上記質量流量計100による流量管理に加えて、ロードセル90によって充填重量が測定されることから、薬液の過剰充填や充填不足が好適に抑制され、充填量不良が減じられる。充填精度は、管理計器の精度はいうまでも無いが、薬液送液圧力(充填タンク94の加圧圧力すなわちタンク加圧圧力)と充填タンク94の液面レベル(すなわちタンク液面レベル)の管理により達成する。
【0045】
生産中は、液面レベルが適正に制御され、これに対応したタンク加圧により充填され、薬液の状態もほぼ気泡の噛み込み等も無く、質量流量計100による充填精度管理を行うことができる。すなわち、質量流量計100による流量管理は連続的にデバイス76に薬液を充填する間は高精度を期待できる。生産終了間近では、充填タンク94内の薬液は減る方向となり、新たな薬液供給が行われないため、適正な液面レベルを維持することが困難となる。すなわち、充填終了時には液流が安定しないため精度が低下する。充填開始時も同様である。これに対して、ロードセル90による重量管理では液流が不安定でも測定精度に影響が生じないが、薬液が高速で充填されると反応の遅れがあるので一定充填量を得ることが困難である。そこで、これらを併用して、例えば充填開始時や充填終了時にはタンク加圧圧力を下げて流速を下げ、ロードセル90によって充填重量を測定しながら充填バルブを制御することにより、充填時間が長くなるが充填量不良を減らすことができる。安定稼働時には質量流量計100によって充填量を管理する。このようにして、質量流量計100のみの管理に比べて薬液ロスが減じられることになる。
【0046】
なお、質量流量計100では気泡の噛み込みにより測定精度に影響を及ぼすが、ロードセル90の場合、重量管理のため液の状態に依存しない利点がある。また、安定稼働時には質量流量計100のみでも差し支えないが、本実施例ではロードセル90による測定を継続することにより、測定の信頼性が高められている。
【0047】
図5に戻って、受渡しステーション80の近傍には、シリコーン塗布ステーション102および口欠け検査ステーション104が備えられている。シリコーン塗布ステーション102は、取り扱われるデバイス76がシリンジである場合に、その内面にシリコーンを塗布するためのものである。また、口欠け検査ステーション104は、取り扱われるデバイス76がガラス製バイアル等のガラス製デバイスである場合に口欠けの有無を検査するためのものである。本実施例の医薬品製造装置10では、デバイス76の相互接触や装置との接触が抑制されているため、破瓶リスクが抑制されると共に口欠け等も生じ難くなっているが、この段階で口欠けを更に検査することで、不良品の発生可能性を一層減じている。
【0048】
また、充填装置18に隣接して備えられた前記の打栓装置20は、薬剤が充填されたデバイス76に打栓して密閉容器を形成するためのものである。打栓装置20にもロボット106が設置されており、充填ステーション86において薬剤が充填されたデバイス76を取り上げて打栓機108まで移動させ、例えば保持したままこれにゴム栓等を打栓する。なお、打栓機108の左側にはトップキャップ打栓機110が備えられているが、これはデバイス76がシリンジである場合に、薬剤充填前にそのトップキャップを打栓するためのものである。また、シリンジを処理する場合には、上記打栓機108はシリンジ後端からガスケットを押し込むガスケット打栓機として機能することになる。
【0049】
また、上記打栓装置20には、打栓機108に隣接してキャップ巻締め機112が備えられている。キャップ巻締め機112は、デバイス76がバイアルである場合に、これにゴム栓が施された後、開口の外周側からキャップを巻き締めするためのものである。
【0050】
また、前記の外洗浄装置22は、上記のようにしてデバイス76に薬剤が充填され且つ打栓(およびキャップ巻き締め)されることによって密閉容器が形成された後、その密閉容器の外表面を洗浄するためのものである。外洗浄装置22は、上記キャップ巻締め機112に連なるバイアル用外洗装置22aと、図5における打栓機108の下方位置に備えられたシリンジ用外洗装置22bとから成る。これら2つの外洗装置22a、22bは、取り扱われるデバイスに応じて使い分けられる。何れも陰圧ボックスを備えたもので、密閉容器となったデバイス76を減圧下で洗浄して集積装置に送るようになっている。
【0051】
ところで、本実施例の医薬品製造装置10においては、前記の充填装置18およびその周辺装置は、図8に示されるようにアイソレータ114によって囲まれている。理解が容易なようにアイソレータ114が設けられている範囲を一点鎖線116で囲んで示す。アイソレータ114は、充填装置18、打栓装置20、トップキャップ打栓機110、巻締め機112、オートクレーブ30の出口外側を囲む位置に設けられている。すなわち、充填装置18が備えられた充填領域128と、打栓装置20が備えられた打栓領域130とを含む範囲にアイソレータ114が設けられている。乾熱滅菌機28およびオートクレーブ30との間や外洗浄装置22との間には入口シャッタ132,出口シャッタ134,136等が備えられており、アイソレータ114内を無菌環境とする際に、それらシャッタ132〜136等が閉じられることで外界から遮断され、密閉空間が形成される。これら入口シャッタ132,出口シャッタ134,136がアイソレータの開閉可能な入口および出口にそれぞれ相当する。なお、無菌環境の形成は、例えば、内部に過酸化水素水を送り込んで蒸発させることにより行われる。
【0052】
また、上記のアイソレータ114には、複数箇所において内部空間に向かって伸びるグローブ118が備えられている。このグローブ118も密閉空間を形成するための境界の一部を成しており、アイソレータ114の壁面に気密に取り付けられている。グローブ118は、アイソレータ114内に送り込まれたゴム栓を所定位置に供給するなど、手作業が必要な場合に随時用いられる。
【0053】
なお、ロボット78,82はその旋回範囲がアイソレータ114の外側にまで広がるように描かれているが、これはロボット自体の仕様を示したもので、アイソレータ114内に設置された状態では、その壁面に干渉しない範囲で作動させられる。アイソレータ壁面との干渉によりロボット78,82の旋回可能範囲が狭くなっている部分もあるが、本実施例においては前述したように7自由度のロボットが用いられていることから、旋回に何ら支障はない。
【0054】
また、図1〜図8では省略しているが、上記のようにアイソレータ114内に設置されたロボット78,82、106には、図9に示すように、スリーブスーツ120が装着されている。スリーブスーツ120は、例えば、PVC(ポリ塩化ビニル)、PTFE(ポリテトラフルオロエチレン)、PFA(テトラフルオロエチレン・パーフルオロアルキルビニルエーテル共重合体)等から成る筒状を成すもので、先端側がアーム先端部すなわち手首62近傍においてパッキング等を介して密接して取り付けられると共に、基台40側もロボット78等が設置された装置上面にパッキング等を介して密接して取り付けられており、内部に気密空間を有する。なお、上記PVC等は、過酸化水素に耐性があり、且つロボット動作時に可動負荷にならない程度の柔軟性を有する樹脂材料である。ロボット78等は、このように気密且つ高い耐食性を有するスリーブスーツ120によって、ハンド66および手首62近傍を除く大部分が覆われた状態にある。ロボット78等は、ハンド66と露出した手首62近傍とが耐食性の高いSUS316Lで構成されるが、その他の部分は全て表面に樹脂コートされたスチールで構成されており、耐食性を有さない。そのため、アイソレータ114内で露出状態にあると、無菌環境を形成するために過酸化水素ガスが発生させられる際に腐食させられ、或いは内部の洗浄時に洗浄液で腐食させられ、また、関節等の可動部の摩耗粉などがアイソレータ114内に入ることになるが、本実施例によれば、上記のようにスリーブスーツ120を装着していることから、これらの問題が全て回避されている。
【0055】
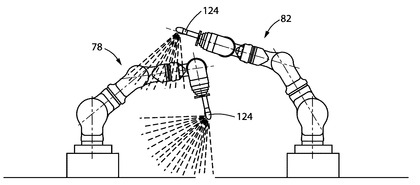
また、前記のロボット78等のハンド66は、用途に応じて複数種類の中から適宜選択して交換可能になっている。このハンド66の交換は、例えば予め記憶されたプログラムに従い、自動的に行わせることができる。図10に、ハンド66がスプレーガン124に取り替えられた使用態様を示す。この使用態様では、ロボット78は自らの足下近傍を洗浄中であり、ロボット82はロボット78を洗浄中である。ロボット78等は7軸を有して動きの自由度が極めて高いことから、このように洗浄処理においても、柔軟に動きながら万遍なく洗浄することができる。そのため、本実施例のようにアイソレータ114内に設置されている場合においても、人手を煩わせることなく、安全且つ確実に洗浄して、清浄度の高い無菌室を維持できる利点がある。なお、図10においては省略されているが、アイソレータ114内に備えられたロボット78等は前記スリーブスーツ120を装着しており、洗浄処理はその装着状態で行われる。そのため、付着した薬剤等が容易に洗い流されるので洗浄が簡単になる利点もある。
【0056】
以上のように構成された医薬品製造装置10によれば、バイアル製剤等の医薬品を製造するに際しては、例えばガラス製バイアルが前記デバイス供給装置12から洗浄機14に供給されると、これに洗浄処理が施される。洗浄されたバイアルは、次いで、ロボット36によってネスト38に倒立状態で入れられてベルトコンベア等で滅菌装置16に送られ、乾熱滅菌処理(樹脂製バイアルの場合は蒸気滅菌処理)が施される。乾熱滅菌を終えて滅菌装置16のトンネルから送り出されたバイアルは、ネスト38に入れられたまま、予め除染処理が施されることで無菌環境が形成され且つ陰圧にされたアイソレータ114内に送り込まれ、更に、ロボット78の近傍まで送られ、例えば複数本ずつ取り出されて受渡しステーション80を経て充填ステーション86に送られる。なお、バイアルが全て取り出されたネスト38は、リターンコンベア126(図1参照)を通ってロボット36の近傍まで戻される。
【0057】
充填ステーション86に送られたバイアルには、予め定められた適量の薬剤(例えば抗がん剤等の薬液)が充填され、打栓装置20にてゴム栓で封止され、更にキャップ巻締め機112でキャップが巻き締めされた後、アイソレータ114から送り出され、外洗浄装置22によって外部に付着した薬剤が洗い流され、トレイなどに集積される。
【0058】
このように、本実施例によれば、アイソレータ114内に充填装置18および打栓装置20等が備えられると共に、各装置に対してスリーブスーツ120で先端部を除いて気密に覆われて保護されたロボット78,82等が設置され、それらロボット78,82等でデバイス76が移送される。そのため、薬剤充填および打栓処理に人が関与する必要が無いので、抗がん剤のような高活性医薬品が取り扱われる場合にも安全に医薬品を製造することができる。また、ロボット78,82等によるデバイス76の移送はピックアンドプレイスで行われるため、ベルトコンベア等で移送する場合におけるデバイス76の転倒や破損が生じない。また、7自由度の多関節ロボットが用いられていることから、デバイス形状や作業内容に応じて容易にその姿勢を制御できる。しかも、ロボット78,82等は、先端部が露出させられているが、関節を含むそれよりも基台40側はスリーブスーツ120によって気密に覆われているので、その関節等からの発塵によるアイソレータ114内の汚染が抑制されると共に、薬剤やこれを洗い流すための洗浄液がロボット78,82等に付着してこれを腐食させることが抑制される。また、アイソレータ114内で過酸化水素ガス等によって除染処理を施す際にも、スリーブスーツ120によって腐食性の強い過酸化水素ガス等からロボット78,82等が保護されるので、安定的に医薬品を製造することができる。
【0059】
また、本実施例によれば、デバイス76が相互に分離した状態でネスト38に倒立させられた状態で移送されることから、蒸気滅菌の際の付着水等が容易に排出されると共に、内部に異物が入ることが一層抑制される利点がある。
【0060】
また、本実施例においては、7軸のロボット36,78等が用いられていることから、従来から広く用いられている6軸ロボットが用いられる場合に比較して、周辺設備や他のロボット等との干渉を避けるために必要な空間が小さくなる。しかも、ハンド66の回り込み姿勢ができることから、ロボット36,78等をデバイス76等の上方を含む近接位置に設置できるので、一層コンパクトなラインになっている利点もある。また、上述したようにロボット36,78等は動きの自由度が高いため、処理ユニットの配置の自由度が高く、追加や変更が容易な利点もある。
【0061】
また、本実施例によれば、ロボット36,78等でデバイス76が移送されることから、ベルトコンベア等で搬送する場合のデバイス76の底部や側面の摩擦が無い利点もある。
【0062】
また、デバイス76の移送にはネスト38が用いられることから、搬送中のベルトとデバイス76との摩擦が生じないので、発塵要素が一層減じられる利点もある。この結果、デバイス76への異物付着も減り、次工程へ前工程の異物(汚染源)持込の確率も減る利点がある。
【0063】
また、アイソレータ114の内外境界部において、ロボット78等によるピックアンドプレイスでデバイス76が移送されることから、受け渡し専用エリアが形成されることとなるので、前工程の搬送機構への直接接触が避けられ、前工程から次工程へ、異物を持ち込む確率が減る利点もある。
【0064】
以上、本発明を図面を参照して詳細に説明したが、本発明は更に別の態様でも実施でき、その主旨を逸脱しない範囲で種々変更を加え得るものである。
【符号の説明】
【0065】
10:医薬品製造装置、12:デバイス供給装置、14:洗浄機、16:滅菌装置、18:充填装置、20:打栓装置、36:ロボット、38:ネスト、76:デバイス、78:ロボット、114:アイソレータ、120:スリーブスーツ
【特許請求の範囲】
【請求項1】
洗浄処理および滅菌処理を施したデバイスに薬剤を充填して打栓することにより医薬品を製造するための製造装置であって、
滅菌処理済のデバイスの入口および出口を開閉可能に備えたアイソレータと、
前記デバイスに薬剤を充填するために前記アイソレータ内に設けられた充填領域と、
前記薬剤が充填されたデバイスに打栓するために前記アイソレータ内に設けられた打栓領域と、
前記アイソレータ内において前記各領域にそれぞれ設置されると共に少なくともアーム先端部を露出させた状態でスリーブスーツによって関節が気密に覆われ且つ前記各領域間で前記デバイスを移送する多関節の複数の作業ロボットと
を、含むことを特徴とする医薬品の製造装置。
【請求項2】
複数個の前記デバイスを個々に分離するための仕切を有する整列保持具によりそれらデバイスを倒立状態で保持して滅菌処理を施すものである請求項1の医薬品の製造装置。
【請求項3】
前記複数の作業ロボットは前記アーム先端部のハンドが交換可能に設けられ且つ洗浄用ハンドを装着して隣接する作業ロボット相互の洗浄処理が可能とされたものである請求項1または請求項2の医薬品の製造装置。
【請求項1】
洗浄処理および滅菌処理を施したデバイスに薬剤を充填して打栓することにより医薬品を製造するための製造装置であって、
滅菌処理済のデバイスの入口および出口を開閉可能に備えたアイソレータと、
前記デバイスに薬剤を充填するために前記アイソレータ内に設けられた充填領域と、
前記薬剤が充填されたデバイスに打栓するために前記アイソレータ内に設けられた打栓領域と、
前記アイソレータ内において前記各領域にそれぞれ設置されると共に少なくともアーム先端部を露出させた状態でスリーブスーツによって関節が気密に覆われ且つ前記各領域間で前記デバイスを移送する多関節の複数の作業ロボットと
を、含むことを特徴とする医薬品の製造装置。
【請求項2】
複数個の前記デバイスを個々に分離するための仕切を有する整列保持具によりそれらデバイスを倒立状態で保持して滅菌処理を施すものである請求項1の医薬品の製造装置。
【請求項3】
前記複数の作業ロボットは前記アーム先端部のハンドが交換可能に設けられ且つ洗浄用ハンドを装着して隣接する作業ロボット相互の洗浄処理が可能とされたものである請求項1または請求項2の医薬品の製造装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】

【図7】
【図8】

【図9】

【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−116495(P2012−116495A)
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願番号】特願2010−265890(P2010−265890)
【出願日】平成22年11月30日(2010.11.30)
【出願人】(510315917)
【出願人】(510315928)
【出願人】(000107457)ルフトテクノ株式会社 (1)
【Fターム(参考)】
【公開日】平成24年6月21日(2012.6.21)
【国際特許分類】
【出願日】平成22年11月30日(2010.11.30)
【出願人】(510315917)
【出願人】(510315928)
【出願人】(000107457)ルフトテクノ株式会社 (1)
【Fターム(参考)】
[ Back to top ]