
半導体ウェーハの薬液回収方法および装置
【課題】 面取り部以外の不純物を薬液中に混入させないようにして面取り部の汚染度合いの分析、評価を精度よく行えるようにする。表面平坦部のすべての範囲について漏れなく薬液を回収して表面平坦部の汚染度合いの分析、評価を精度よく行えるようにする。
【解決手段】半導体ウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に、薬液40の半径方向位置(薬液中心のウェーハ中心からの距離)が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。つぎに半導体ウェーハ10の面取り部15と境界領域11aとの両方に接触できる位置に、薬液40の半径方向位置が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。液滴保治具30は、たとえば半導体ウェーハ10の周上の所望の開始点から終了点に至るまで周方向に相対回転される。
【解決手段】半導体ウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に、薬液40の半径方向位置(薬液中心のウェーハ中心からの距離)が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。つぎに半導体ウェーハ10の面取り部15と境界領域11aとの両方に接触できる位置に、薬液40の半径方向位置が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。液滴保治具30は、たとえば半導体ウェーハ10の周上の所望の開始点から終了点に至るまで周方向に相対回転される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハに関し、特に半導体ウェーハの面取り部の薬液を回収する方法および装置に関するものである。
【背景技術】
【0002】
シリコンウェーハの表面に付着した金属等の不純物の量、濃度を分析し汚染度合いを評価する方法の一つに、薬液回収による分析評価方法がある。
【0003】
薬液回収による分析評価方法では、シリコンウェーハの部位に応じて装置、方法が使い分けられる。
【0004】
シリコンウェーハの表面平坦部を分析、評価する場合には、図1に示す液滴自動走査装置が用いられる。
【0005】
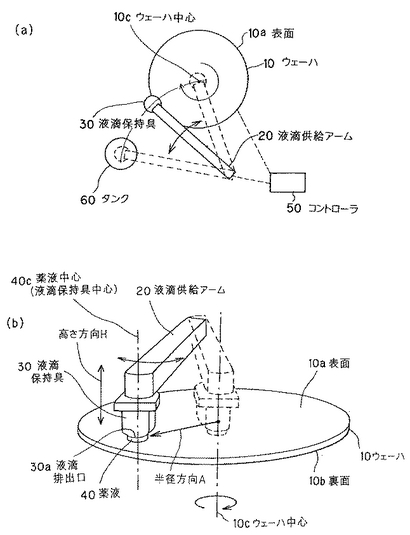
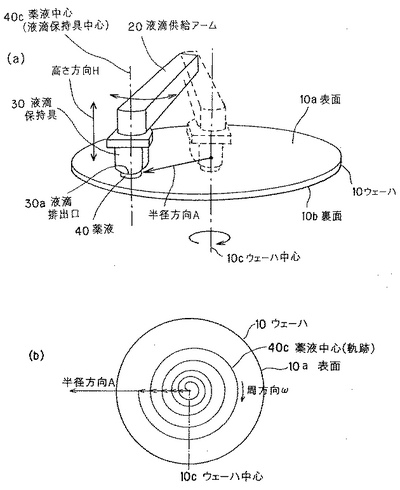
図1(a)は液滴自動走査装置の上面図を示し、図1(b)は液滴自動走査装置の斜視図を示している。
【0006】
これら図1(a)、(b)に示すように、シリコンウェーハ10の裏面10aは、図示しないチャックにより水平姿勢となるように把持されるとともに、回転自在に支持されている。シリコンウェーハ10の表面10a側には、液滴供給アーム20と液滴保持具30が配置されている。液滴供給アーム20の先端には液滴保持具30がバキュームによりチャックされている。液滴供給アーム20は、液滴保持具30を、シリコンウェーハ10の中心10cから同ウェーハ10の半径方向Aに移動させる自由度を有している。また液滴供給アーム20の高さは所定高さに調整されており、液滴保持具30の液滴排出口30aはシリコンウェーハ10の表面10aから、薬液40を保持するに十分な所定距離だけ離間されている。コントローラ50によって液滴供給アーム20が駆動制御され、液滴保治具30が半径方向Aに移動するとともに、シリコンウェーハ10の回転駆動源が駆動制御されシリコンウェーハ10が回転する。シリコンウェーハ10から離れた場所には、薬液40を回収するためのタンク60が設けられている。
【0007】
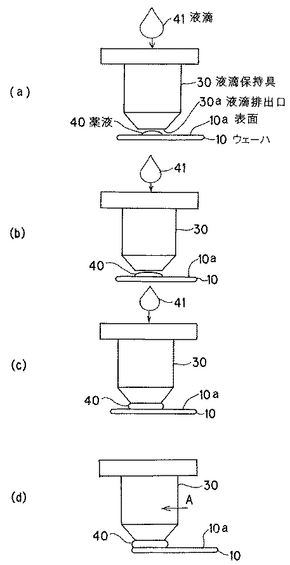
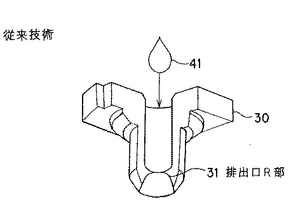
図2(a)〜(d)、液滴保持具30が薬液40を保持する手順を説明する図で、図3は液滴保持具30の断面を斜視図にて示している。
【0008】
図2(a)、図2(b)に示すように液滴供給アーム20の内部を介して液滴41が液滴保治具30内に供給され液滴排出口30aからシリコンウェーハ10の表面10aに1滴づつ順次滴下される。これによりシリコンウェーハ10上の薬液40が次第に大きくなる。やがて図3に示す排出口R部に薬液40が到達する大きさになると、薬液40において表面張力が発生し液滴保治具30は薬液40をシリコンウェーハ10の表面10aに接触させた状態で保持することが可能となる(図2(c))。
【0009】
以後液滴供給アーム20を駆動制御し液滴保治具30を半径方向Aに移動させれば、薬液40を薬液保治具30と一緒に同方向Aに移動させることができる(図2(d))。
【0010】
つぎに図1の液滴自動走査装置の動作について説明する。
【0011】
図4(a)は液滴保治具30の半径方向の動きを示す斜視図で、図4(b)は薬液40の中心40cがシリコンウェーハ10上で描く軌跡を示している。
【0012】
上述したように薬液保治具30によって薬液40を保持できる状態になったならば、コントローラ50によって液滴供給アーム20が駆動制御され、液滴保持具30がシリコンウェーハ10の中心10cに位置される。そして同図4(a)に示すように、コントローラ50によって回転駆動源が駆動制御されてシリコンウェーハ10が一定速度で回転されるとともに、コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに所定の速度(たとえば1周当たり数mmのピッチで)で移動される。このため液滴保治具30は
、シリコンウェーハ10の半径方向Aに所定速度で移動しながらシリコンウェーハ10の周方向ωに一定速度でシリコンウェーハ10に対して相対的に回転する。この結果、図4(b)に示すように、薬液中心40cは、シリコンウェーハ10の表面10a上で周方向ωに走査され、シリコンウェーハ10の中心10cを起点とする螺旋状の軌跡を描く。
【0013】
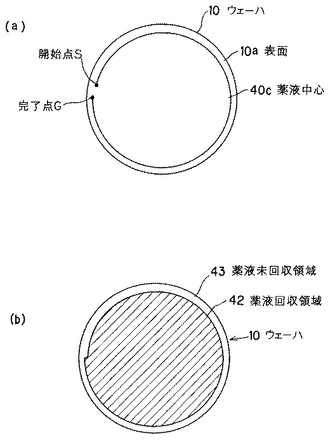
図5(a)は薬液中心40cの最後の一周の軌跡を示している。薬液中心40cが走査開始点Sから走査終了点Gまで走査される間に半径方向Aに所定距離進むため、両点の半径方向位置は異なっている。
【0014】
図5(b)は、シリコンウェーハ10の表面のうち薬液40が接触して不純物が薬液40中に溶解し不純物を含む薬液40の回収が行われる薬液回収領域42と、薬液回収領域42以外の薬液未回収領域43の分布を示している。図5(b)に斜線で示す薬液回収領域42は、図5(a)に示す最後の一周の軌跡に応じた形状となっており、シリコンウェーハ10の周方向の各部で半径方向長さが異なっている。
【0015】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の表面平坦部の汚染度合いを評価することができる。
【0016】
つぎにシリコンウェーハ10の面取り部を分析、評価するための装置について説明する。
【0017】
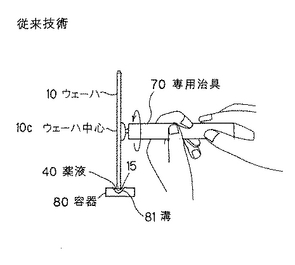
図6は、手動でシリコンウェーハ10の面取り部(エッジ部)の薬液回収を行う手動薬液回収装置を示している。
【0018】
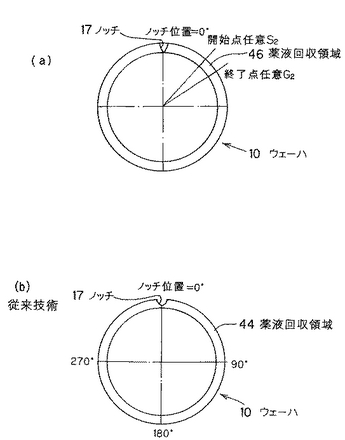
同図6に示すように、シリコンウェーハ10のウェーハ中心10cには専用治具70が、その長手方向がウェーハ面に対して垂直となるように取り付けられる。容器80には船底状の溝81が形成されており溝81には薬液40が貯留されている。シリコンウェーハ10は、垂直に立てられて、面取り部15が薬液40に浸漬される。そしてシリコンウェーハ10を垂直状態に保持しながら手動で専用治具70が90゜回転させられ、シリコンウェーハ10の面取り部15が周方向に1/4周、薬液40が接触し、この領域の面取り部15に付着している不純物が薬液40中に溶解される。図11(b)はシリコンウェーハ10の回収領域44を示している。作業者は、ノッチ17が形成された位置を0゜として、そのノッチ位置(0゜)から専用治具70が1/4周(90゜)回転したことを目視で確認することで薬液回収作業を行う。
【0019】
容器80に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いを評価することができる。なお薬液回収作業はクリーンルーム内で行われる。
【0020】
手動薬液回収装置は、下記特許文献1に開示されている。
【0021】
また下記特許文献2、3には、保持装置と回転装置を設け、保持装置によって図6の手動薬液回収装置と同様にしてシリコンウェーハ10を垂直状態に保持しつつ回転装置によってシリコンウェーハ10を回転させることにより、面取り部(エッジ部)の薬液回収を自動的に行う自動薬液回収装置の構成が開示されている。
【特許文献1】特開2000−77492号公報
【特許文献2】特開平10−92889号公報
【特許文献3】特開平11−204604号公報
【発明の開示】
【発明が解決しようとする課題】
【0022】
つぎに上述した従来技術の問題点について説明する。
【0023】
図1の液滴自動走査装置によれば、図5で説明したように液滴中心40cが最後の一周で螺旋状の軌跡を描くため薬液回収領域42が安定しないという問題がある。このためシリコンウェーハ10の表面平坦部の汚染度合いの分析結果、評価内容に誤差が生じるおそれがある。
【0024】
また液滴保持具30の高さは表面平坦部上で薬液40を保持できる高さに固定されているため、たとえ液滴保持具30を面取り部15まで移動させたとしても面取り部15に薬液40を回り込ませることができない。このため、この液滴自動走査装置を用いて面取り部15の分析、評価を行うことはできなかった。
【0025】
また図6の手動薬液回収装置によれば、人手による回収作業であるため作業者次第で回収領域がばらつき回収領域が安定しないという問題がある。このためシリコンウェーハ10の面取り部15の汚染度合いの分析結果、評価内容に誤差が生じるおそれがある。
【0026】
またシリコンウェーハ10を垂直状態に保持して面取り部15を薬液40に浸漬するため面取り部15以外の領域も薬液に浸漬されてしまうため面取り部15の分析結果、評価を精度よく行うことができない。これを図7を用いて説明する。
【0027】
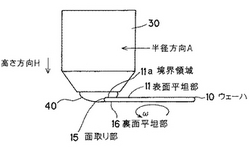
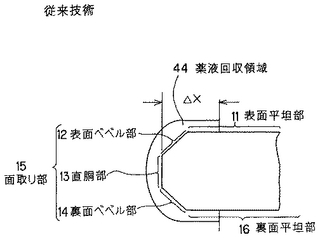
図7はシリコンウェーハ10の外周部の断面を示している。シリコンウェーハ10は、表面10aのうち平坦になっている表面平坦部11と面取り部15と裏面10bのうち平坦になっている裏面平坦部16とからなる。面取り部15は、表面10aのうち表面平坦部11に対して所定角度でカットされた面を有する表面ベベル部12と、表面平坦部11および裏面平坦部16に対して垂直な面を有する直胴部13と、裏面10bのうち裏面平坦部16に対して所定角度でカットされた面を有する裏面ベベル部14とからなる。
【0028】
シリコンウェーハ10を垂直状態にして面取り部15を薬液40に浸漬させると直胴部15から所定距離ΔX離れた箇所まで薬液40が接触する。薬液回収領域44は面取り部15のみならず表面平坦部11、裏面平坦部16を含んでいる。このため表面平坦部11、裏面平坦部16に付着されている不純物が薬液40中に混入する。特に裏面平坦部16の不純物は、品種依存性が大きくバックサイドダメージ等による裏面特有の不純物を含んでいる。このため汚染度合いの分析結果、評価内容は、裏面1bの汚染度合いの影響を大きく受けることになり、面取り部15の汚染度合いの分析、評価を精度よく行うことができない。
【0029】
また人手による作業のため、たとえクリーンルーム内で作業を行うにせよ、薬液40の上方から薬液40内に落下した不純物によって汚染されるおそれがあり、分析結果、評価内容に誤差が生じるおそれがある。
【0030】
また図11(b)で説明したように目視で回収角度を確認しながら回収するため、回収領域はノッチ17を基準(0゜)として90゜、180゜、270゜、360゜(全周)といった目視で角度が確認可能な領域に制限されてしまう。このように回収開始の角度、回収終了の角度には制限があり、開始角度、終了角度を任意に定め任意の領域について薬液40を回収することができなかった。
【0031】
一方、自動薬液回収装置で面取り部15の薬液40を回収する場合には、手動で行うことによる上述した問題は生じないものの、シリコンウェーハ10を垂直に保持しながら薬液40に浸漬するという手法は変わらないため図7で説明したように面取り部15以外の領域(特に裏面平坦部16)の不純物の影響を受けて分析結果、評価内容の精度が損なわれるという問題は避けられない。またシリコンウェーハ10は垂直姿勢となっているため薬液40の上方にシリコンウェーハ10、装置動作部が位置しているため薬液40中に浸漬部位以外に上方から不純物が混入することが懸念される。
【0032】
また上述したように図1の液滴自動走査装置は、表面平坦部11の薬液40を回収する専用の装置であり、図6の手動薬液回収装置あるいは自動薬液回収装置は、面取り部15の薬液40を回収する専用の装置であるため、表面平坦部11の汚染度合いの分析、評価と面取り部15の汚染度合いの分析、評価の両方を行う場合には、2台の装置を用意し2枚のシリコンウェーハを用意し作業を別々に行わなければならない。このため作業に多大な時間と手間を要し作業効率が大幅に損なわれる。
【0033】
本発明は上述した問題をなくすことを解決課題としてなされたものである。
【0034】
本発明は、面取り部15以外の不純物を薬液40中に混入させないようにして面取り部15の汚染度合いの分析、評価を精度よく行えるようにすることを解決課題とするものである。
【0035】
また本発明は、表面平坦部11のすべての範囲について漏れなく薬液40を回収して表面平坦部11の汚染度合いの分析、評価を精度よく行えるようにすることを解決課題とするものである。
【0036】
また本発明は、1台の装置、1枚のシリコンウェーハ10を用いて表面平坦部11の薬液回収作業と面取り部15の薬液回収作業を連続的に行えるようにして作業効率を高めることを解決課題とするものである。
【0037】
また本発明は、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域を回収できるようにすることを解決課題とするものである。
【課題を解決するための手段】
【0038】
第1発明は、
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
半導体ウェーハの面取り部と前記境界領域との両方に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含むことを特徴とする。
【0039】
第2発明は、
液滴保持具によって、半導体ウェーハの表面に薬液を接触させた状態で、液滴保持具を半導体ウェーハの半径方向に移動させつつ半導体ウェーハの周方向に相対的に回転させることにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収装置において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に薬液が接触できる半径方向位置に、液滴保持具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第1の制御手段と、
半導体ウェーハの面取り部と前記境界領域との両方に薬液が接触できる半径方向位置に、液滴保治具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第2の制御手段と
を備えたことを特徴とする。
【0040】
第3発明は、第2発明において、
第2の制御手段は、薬液が面取り部に回り込むように、液滴保治具と半導体ウェーハとの距離を調整することを特徴とする。
【0041】
第4発明は、第2発明において、
第2の制御手段は、液滴保治具を半導体ウェーハの周上の所望の開始点から終了点に至るまで周方向に相対回転させることを特徴とする。
【0042】
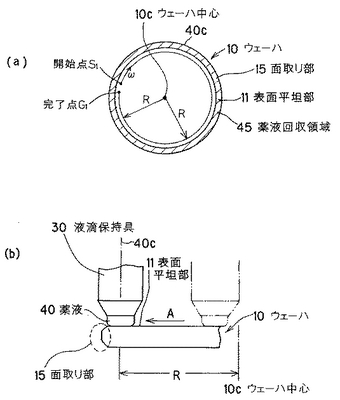
第1発明〜第4発明によれば、図8(a)、(b)に示すように、半導体ウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に、薬液40の半径方向位置(薬液中心40cのウェーハ中心10cからの距離R)が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。
【0043】
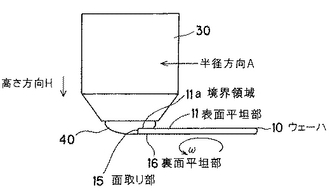
つぎに図9に示すように、半導体ウェーハ10の面取り部15と境界領域11aとの両方に接触できる位置に、薬液40の半径方向位置が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。
【0044】
第3発明では、図9に示すように、薬液40が面取り部15に回り込むように、液滴保治具30と半導体ウェーハ10との距離が調整される。具体的には液滴保治具30の高さが調整される。
【0045】
第4発明では、図9において周方向ωの走査を行う際に、図11(a)に示すように、液滴保治具30は半導体ウェーハ10の周上の所望の開始点S2から終了点G2に至るまで周方向に相対回転される。
【0046】
第5発明は、
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、ウェーハ中心から面取り部との境界領域に至るまでは、薬液を半径方向に移動させながら、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
薬液の半径方向位置が、前記面取り部との境界領域に接触できる位置に到達した時点で、薬液の半径方向位置を固定し、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含むことを特徴とする。
【0047】
第5発明によれば、図4(a)、(b)に示すように、半導体ウェーハ10の表面平坦部11のうち、ウェーハ中心10cから面取り部15との境界領域に至るまでは、薬液40を半径方向Aに移動させながら、周方向ωに走査されて、不純物を含む薬液40が回収される。つぎに図8(a)、(b)に示すように、薬液40の半径方向位置が、面取り部15との境界領域11aに接触できる位置に到達した時点で、薬液40の半径方向位置が固定(距離R一定)されて、周方向ωに走査され、不純物を含む薬液40が回収される。
【発明の効果】
【0048】
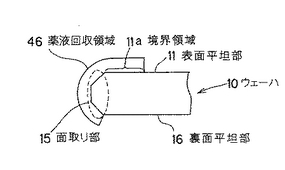
第1発明〜第4発明によれば、図10に示すように、薬液40がシリコンウェーハ10の周方向全域にわたり面取り部15と境界領域11aの両方(薬液回収領域46)に接触して面取り部15に付着している不純物が薬液40中に溶解される。ここで境界領域11aに付着していた不純物は、前工程つまり図8(a)に示す表面平坦部11の最後の回収工程で既に回収済みである。したがって図10のように薬液40の一部が境界領域11aに接触していても境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に溶解することになる。以上のようにシリコンウェーハ10の面取り部15の不純物のみを薬液40中に溶解させるようにしたので、面取り部15の汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0049】
また第1発明〜第4発明によれば、一台の液滴自動走査装置(図1)を用い一枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について薬液回収を連続的に行うことができるため、作業効率が飛躍的に向上する。
【0050】
また第4発明によれば、図11(a)に示すように、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域46を回収することができるようになったため、薬液回収領域の指定の自由度が向上する。
【0051】
また第5発明によれば、表面平坦部11のすべての範囲について漏れなく薬液40を回収することができるので、表面平坦部11の汚染度合いの分析、評価を精度よく行うことができる。
【0052】
更に、第1発明〜第4発明によれば、1枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について汚染度合いを分析、評価できるため、表面平坦部11、面取り部15毎に複数毎のウェーハを用いてウェーハの汚染度合いを分析、評価する従来技術と比較して、分析、評価の精度を高めることができる。
【発明を実施するための最良の形態】
【0053】
以下図面を参照して本発明に係る半導体ウェーハの薬液回収方法および装置を実施する上で最良の形態について説明する。
【0054】
本実施形態では、図1に示される液滴自動走査装置が用いられる。図1に示す液滴自動走査装置によって表面平坦部11の回収作業と面取り部15の回収作業が1枚のシリコンウェーハ10を用いて連続的に行われる。
【0055】
図1(a)は液滴自動走査装置の上面図を示し、図1(b)は液滴自動走査装置の斜視図を示している。
【0056】
これら図1(a)、(b)に示すように、シリコンウェーハ10の裏面10aは、図示しないチャックにより水平姿勢となるように把持されるとともに、回転自在に支持されている。シリコンウェーハ10の表面10a側には、液滴供給アーム20と液滴保持具30が配置されている。液滴供給アーム20の先端には液滴保持具30がバキュームによりチャックされている。液滴供給アーム20は、液滴保持具30を、シリコンウェーハ10の中心10cから同ウェーハ10の半径方向Aに移動させる自由度を有している。また液滴供給アーム20は、液滴保治具30を高さ方向Hに移動させる自由度を有している。液滴保治具30の高さが調整されることによってシリコンウェーハ10の表面10aから液滴保治具30の薬液排出口30aまでの距離が任意の大きさに調整される。
【0057】
コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに移動するとともに高さ方向Hに移動する。またコントローラ50によってシリコンウェーハ10の回転駆動源が駆動制御されシリコンウェーハ10が回転する。シリコンウェーハ10から離れた場所には、薬液40を回収するためのタンク60が設けられている。
【0058】
図2(a)〜(d)は液滴保持具30が薬液40を保持する手順を説明する図で、図3は液滴保持具30の断面を斜視図にて示している。
【0059】
図2(a)、図2(b)に示すように液滴供給アーム20の内部を介して液滴41が液滴保治具30内に供給され液滴排出口30aからシリコンウェーハ10の表面10aに1滴づつ順次滴下される。これによりシリコンウェーハ10上の薬液40が次第に大きくなる。やがて図3に示す排出口R部に薬液40が到達する大きさになると、薬液40において表面張力が発生し液滴保治具30は薬液40をシリコンウェーハ10の表面10aに接触させた状態で保持することが可能となる(図2(c))。
【0060】
以後液滴供給アーム20を駆動制御し液滴保治具30を半径方向Aに移動させれば、薬液40を薬液保治具30と一緒に同方向Aに移動させることができる(図2(d))。
【0061】
つぎに図1の液滴自動走査装置の動作について説明する。
【0062】
(実施例1)
(表面平坦部11の回収)
図4(a)は液滴保治具30の半径方向の動きを示す側面図で、図4(b)は薬液40の中心40cがシリコンウェーハ10上で描く軌跡を示している。
【0063】
表面平坦部11の薬液回収時には、液滴保持具30の高さは、表面平坦部11上に薬液40を接触させた状態で保持できる高さに調整されている。
【0064】
図2(a)〜(c)に示す手順を経て液滴保治具30によって薬液40を保持できる状態になったならば、コントローラ50によって液滴供給アーム20が駆動制御され、液滴保持具30がシリコンウェーハ10の中心10cに位置される。そして図4(a)に示すように、コントローラ50によって回転駆動源が駆動制御されてシリコンウェーハ10が一定速度で回転されるとともに、コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに所定の速度(たとえば1周当たり数mmのピッチ)で移動される。このため液滴保治具30は、シリコンウェーハ10の半径方向Aに所定速度で移動しながらシリコンウェーハ10の周方向ωに一定速度でシリコンウェーハ10に対して相対的に回転する。この結果、図4(b)に示すように、薬液中心40cは、シリコンウェーハ10の表面10a上で周方向ωに走査され、シリコンウェーハ10の中心10cを起点とする螺旋状の軌跡を描く。
【0065】
コントローラ50は、液滴保治具30の半径方向位置が、シリコンウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に達したならば、液滴保治具30の半径方向Aの移動を停止して半径方向位置を保持する。このときのシリコンウェーハ10と液滴保治具30の位置関係を図8(b)に示す。
【0066】
つぎにコントローラ50は、薬液40の半径方向Aの位置を図8(b)に示す位置に位置決めし保持した状態で、シリコンウェーハ10を1回転させる。このため図8(a)に示すように薬液中心40cは開始点S1から完了点G1に至るまで同じ半径距離Rを保持しながら周方向ωに走査される。薬液中心40cはウェーハ中心10cを中心とした真円を描く。これにより表面平坦部11のうち面取り部15との境界領域の不純物が薬液40中に溶解される。なお開始点S1から完了点G1までの走査を2回以上行ってもよく、開始点S1から完了点G1まで走査した後に完了点G1から開始点S1に戻るように走査してもよい。
【0067】
以上のようにしてシリコンウェーハ10の表面平坦部11の全ての範囲について漏れなく薬液40を回収することができる。薬液回収領域45は、図8(a)に示すように表面1aのうち面取り部15(斜線で示す)を除いた全ての部分(表面平坦部11)である。
【0068】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の表面平坦部11の汚染度合いを評価することができる。
【0069】
以上のようにシリコンウェーハ10の表面平坦部11の全ての範囲について漏れなく薬液40を接触させるようにしたので、表面平坦部11の汚染度合いの分析、評価をきわめて安定して精度よく行うことができる。
【0070】
図5(a)、(b)に示す従来技術と比較すると、従来技術では、薬液中心40cが最後の一周で螺旋状の軌跡を描くため表面平坦部11のすべての部分について薬液40を回収しきれないという問題があったが、本実施形態によれば、面取り部15との境界領域に接触できる位置に薬液40を保持した状態で真円の軌跡を描くようにしたため表面平坦部11の全ての範囲について薬液40を回収することができる。
【0071】
(面取り部15の回収)
図9は面取り部15の薬液回収時の液滴保治具30とシリコンウェーハ10の位置関係を示す側面図であり、図10はシリコンウェーハ10の外周部と薬液40との位置関係を示す側面図である。
【0072】
上述したように表面平坦部11の薬液回収が終了すると、コントローラ50は、引き続き図9に示すように、さらに液滴保治具30を半径方向Aに移動させるとともに液滴保治具30の高さを低くして、薬液40が、シリコンウェーハ10の面取り部15と、表面平坦部11のうち面取り部15との境界領域11aの両方に接触できるように位置させる。このように薬液40が、面取り部15と境界領域11aの両方に接触できる状態になったならば、コントローラ50は、液滴保治具30の半径方向Aの移動と高さ方向Hの移動を停止する。
【0073】
つぎにコントローラ50は、液滴保治具30の半径方向位置、高さを図9に示す位置、高さに位置決めし保持した状態で、シリコンウェーハ10を1回転させて液滴中心40cをシリコンウェーハ10の周方向ωに走査する。なお走査を2周以上行ってもよく、開始点から完了点まで走査した後に完了点から開始点に戻るように走査してもよい。
【0074】
これにより図10に示すように、薬液40がシリコンウェーハ10の周方向全域にわたり面取り部15と境界領域11aの両方(薬液回収領域46)に接触して面取り部15に付着している不純物が薬液40中に溶解される。ここで境界領域11aに付着していた不純物は、前工程つまり図8(a)に示す表面平坦部11の最後の回収工程で既に回収済みである。したがって図10のように薬液40の一部が境界領域11aに接触していても境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に溶解することになる。
【0075】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いを評価することができる。
【0076】
以上のようにシリコンウェーハ10の面取り部15の不純物のみを薬液40中に溶解させるようにしたので、面取り部15の汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0077】
ここで図7に示す従来技術と比較すると、従来技術では、シリコンウェーハ10を垂直姿勢にして薬液40に浸漬させるという手法をとっていたため、裏面平坦部16、表面平坦部11における不純物や上方からの落下による不純物が薬液40中に混入して面取り部15の汚染度合いの分析、評価を精度よく行うことができなかったが、本実施形態によれば、薬液40が面取り部15および境界部11aのみ(薬液回収領域46)に接触するがそのうち境界部11aにおける不純物はすでに回収済みであるため面取り部15の不純物のみを薬液40中に取り込むことができ汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0078】
つぎに薬液40の組成について説明する。
【0079】
図9に示すように、薬液40を表面平坦部11側から面取り部15に回り込ませるためには、薬液40の組成として、シリコンウェーハ10に対する密着性が高いものであることが望ましい。
【0080】
薬液40の密着性は、薬液40の粘性および酸化性を高くすることによって増大させることができる。すなわち薬液40の粘性を高めることによって密着性を高めることができる。また薬液40の酸化性を増大させることによって親水性を増大させ密着性を高めることができる。
【0081】
実験では、図9に示すように、薬液40を表面平坦部11側から面取り部15に回り込ませることができる粘性を得るように調合されたフッ酸と硝酸からなる水溶液の薬液40を使用した。これにより、良好な密着性が得られた。
【0082】
(実施例2)
上述した実施例1では、表面平坦部11における薬液回収を行う際に、面取り部15との境界領域に至るまでは図4(b)に示すように、薬液40を半径方向Aに一定速度で移動させながら周方向に走査させることで螺旋状の軌跡を描かせるようにしている。
【0083】
しかし、液滴40の半径方向位置を固定した状態で周方向に走査し1周以上走査後に所定ピッチ半径方向に移動させ、同じく半径方向位置を固定した状態で周方向に走査させる動作を繰り返し行うようにして真円の軌跡を描かせるようにしてもよい。表面平坦部11のすべての範囲について薬液回収を漏れなく行えるのであれば、薬液40(薬液中心40c)の軌跡は図4(b)に示す螺旋状に限定されるわけではない。
【0084】
(実施例3)
上述した実施例1、2では、表面平坦部11の全面について薬液40を走査し(図4(b)、図8(a))、その後に、面取り部15の走査(図9)に移行するようにしているが、表面平坦部11の汚染度合いの分析、評価は不要であって面取り部15の汚染度合いのみについて分析、評価を行う場合であれば、必ずしも表面平坦部11の全面について薬液40を走査する必要はなく、図4(b)に示す走査は省略することにし図8(a)に示すように表面平坦部11のうち面取り部15との境界領域のみについて薬液40を走査することにし、その後に面取り部15の走査(図9)に移行する実施も可能である。
【0085】
この実施例3の処理手順について説明する。
【0086】
最初に薬液中心40cはウェーハ中心10cではなく図8(a)に示す開始点S1に位置され開始点S1を起点にして走査を開始して終了点G1まで周方向ωに走査される。これにより表面平坦部11のうち面取り部15との境界領域のみについて薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。つぎに図9に示す面取り部15の走査(図9)に移行する。面取り部15および境界領域11aに薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いが評価される。
【0087】
この実施例3においても、図10に示すように薬液40が面取り部15と境界領域11aの両方(薬液回収領域46)に接触することになるが、境界領域11aに付着していた不純物は、図8(a)に示すように表面平坦部11のうち面取り部15との境界領域を薬液40が走査することによって既に回収済みであるため、境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に取り込まれることになり、シリコンウェーハ10の面取り部15の汚染度合いの分析、評価が精度よく行われる。
【0088】
(実施例4)
面取り部15の薬液回収領域46は、シリコンウェーハ10の全周にわたる領域であってもよく、シリコンウェーハ10の周方向の一部の円弧状の領域であってもよい。
【0089】
たとえば図11(a)に示すように、シリコンウェーハ10の周上の任意の所望する点(角度)に、回収の開始点S2、回収の終了点G2を定めて、これら開始点S2から終了点G2までの領域46のみについて薬液40を回収してもよい。開始点S2は、ノッチ17の位置から外れた位置に定めることができる。
【0090】
この実施例4の手順について説明する。
【0091】
薬液中心40cは図8(a)に示すように、完了点G1に至るまで周方向ωに走査される。完了点G1は、周上の位置(回転角度)が図11(a)の回収開始点S2に一致するように定められる。これにより表面平坦部11に薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。
【0092】
図8(a)に示す表面平坦部11の走査が終了すると、薬液中心40cの周上の位置(回転角度)(G1)を保持しながらそのまま薬液中心40cを半径方向Aに移動させて回収開始点S2に位置させ図9に示す状態に保持する。そして薬液中心40cを周方向ωに回収終了点G2まで走査して、図11(b)に示すように開始点S2から終了点G2までの領域46について面取り部15の薬液回収を行う。 開始点S2、終了点G2の周上位置は、シリコンウェーハ10の回転角度に置き換えることができる。たとえばシリコンウェーハ10の現在の回転角度を検出するセンサが設けられ、センサの検出結果がコントローラ50にフィードバックされる。コントローラ50は、フィードバックされたウェーハ回転角度に基づいて薬液中心40cが開始点S2(開始回転角度)から終了点G2(終了回転角度)まで移動するようにシリコンウェーハ10の回転を制御する。
【0093】
これにより面取り部15および境界領域11aに薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いが評価される。
【0094】
この実施例4においても、図10に示すように薬液40が面取り部15と境界領域11aの両方(薬液回収領域46)に接触することになるが、境界領域11aに付着していた不純物は、図8(a)に示すように表面平坦部11のうち面取り部15との境界領域を薬液40が走査することによって既に回収済みであるため、境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に取り込まれることになり、シリコンウェーハ10の面取り部15の汚染度合いの分析、評価が精度よく行われる。
【0095】
さらに本実施例4によれば、薬液回収領域が従来技術(図11(b))のように、目視で角度が確認可能な領域44に制限されてしまうことがなく、開始点S2、終了点G2を任意に定め任意の領域46について回収することができ回収領域の自由度を高めることができる。たとえばシリコンウェーハ10をチャックした箇所など特定の薬液回収領域46をピンポイントで指定でき、特定の領域の汚染度合いを評価することが可能となる。
【0096】
なおこの実施例4では、図11(a)に示すように面取り部15の薬液回収は周上の一部の円弧状の領域46に限られるため、図8(a)で面取り部15との境界領域を走査を行う際には、図11(a)の領域46に対応する内側の円弧状の領域のみを走査してもよい。
【0097】
以上説明したように本実施形態によれば、面取り部15以外の不純物が薬液40中に混入しないため面取り部15の汚染度合いの分析、評価を精度よく行うことができる。
【0098】
また本実施形態によれば、一台の液滴自動走査装置(図1)を用い一枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について薬液回収を連続的に行うことができるため、作業効率が飛躍的に向上する。
【0099】
なお本実施形態で説明した動作は、既存の液滴自動操作装置のコントローラ50内の制御プログラムを変更することで実現される。液滴保治具30を半径方向A、高さ方向Hに移動させる制御内容を変更したプログラムをコントローラ50にインストールするという簡易な改造で対処することができるので、装置開発に要するコストを飛躍的に低減させることができる。なお本実施形態では、シリコンウェーハ10を回転させることで液滴保治具30の周方向ωの走査を実現させているが、シリコンウェーハ10を回転させる代わりに液滴供給アーム20を回転させることで液滴保治具30の周方向ωの走査を実現させてもよい。同様に液滴供給アーム20を移動させる代わりにシリコンウェーハ10を移動させて、液滴保治具30のシリコンウェーハ10に対する半径方向Aの相対的な移動を実現させてもよい。
【0100】
また本実施形態によれば、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域を回収することができるようになったため、薬液回収領域の指定の自由度が向上する。
【0101】
(実施例5)
上述した実施形態では、面取り部15の薬液回収を行う場合を想定して説明したが、面取り部15の汚染度合いの分析、評価は不要であって表面平坦部11の汚染度合いの分析、評価のみを行う場合には、図8(a)に示す表面平坦部11のうち面取り部15との境界領域の走査を終了し薬液40をタンク60に回収した後は、図9に示す面取り部15の走査に移行させないまま処理を終了させてもよい。この実施例5によれば、表面平坦部11のすべての範囲について漏れなく薬液40を回収することができるので、表面平坦部11の汚染度合いの分析、評価を精度よく行うことができる。
【産業上の利用可能性】
【0102】
本実施形態では、シリコンウェーハを対象として説明したがシリコンウェーハ以外の半導体ウェーハ、たとえばガリウム砒素ウェーハを対象として実施することができる。
【図面の簡単な説明】
【0103】
【図1】図1(a)、(b)は液滴自動走査の構成を示す図である。
【図2】図2(a)〜(d)は液滴保治具が液滴を保持する動作を説明する図である。
【図3】図3は液滴保治具の内部を示す斜視図である。
【図4】図4(a)、(b)はシリコンウェーハに対する薬液中心の動きを説明する図である。
【図5】図5(a)、(b)は従来技術を説明する図でシリコンウェーハに対する薬液中心の動きを説明する図である。
【図6】図6は従来技術を説明する図で手動薬液回収装置の動作を説明する図である。
【図7】図7は図6の手動薬液回収装置で回収される領域を示す図である。
【図8】図8(a)、(b)は薬液が表面平坦部のうち面取り部との境界領域に接触できる半径方向位置に位置決めされた状態で周方向に走査される動作を説明する図である。
【図9】図9は薬液が面取り部と、表面平坦部のうち面取り部との境界領域の両方に接触できる状態になっていることを示す図である。
【図10】図10は図9に示す状態に位置決めされたときの薬液回収領域を示す図である。
【図11】図11(a)は実施形態で回収することが可能な薬液回収領域を示す図で、図11(b)は従来技術で回収することが可能な薬液回収領域を示す図である。
【符号の説明】
【0104】
10 シリコンウェーハ
11 表面平坦部
11a 境界領域
15 面取り部
30 液滴保治具
50 コントローラ(第1の制御手段、第2の制御手段)
【技術分野】
【0001】
本発明は、半導体ウェーハに関し、特に半導体ウェーハの面取り部の薬液を回収する方法および装置に関するものである。
【背景技術】
【0002】
シリコンウェーハの表面に付着した金属等の不純物の量、濃度を分析し汚染度合いを評価する方法の一つに、薬液回収による分析評価方法がある。
【0003】
薬液回収による分析評価方法では、シリコンウェーハの部位に応じて装置、方法が使い分けられる。
【0004】
シリコンウェーハの表面平坦部を分析、評価する場合には、図1に示す液滴自動走査装置が用いられる。
【0005】
図1(a)は液滴自動走査装置の上面図を示し、図1(b)は液滴自動走査装置の斜視図を示している。
【0006】
これら図1(a)、(b)に示すように、シリコンウェーハ10の裏面10aは、図示しないチャックにより水平姿勢となるように把持されるとともに、回転自在に支持されている。シリコンウェーハ10の表面10a側には、液滴供給アーム20と液滴保持具30が配置されている。液滴供給アーム20の先端には液滴保持具30がバキュームによりチャックされている。液滴供給アーム20は、液滴保持具30を、シリコンウェーハ10の中心10cから同ウェーハ10の半径方向Aに移動させる自由度を有している。また液滴供給アーム20の高さは所定高さに調整されており、液滴保持具30の液滴排出口30aはシリコンウェーハ10の表面10aから、薬液40を保持するに十分な所定距離だけ離間されている。コントローラ50によって液滴供給アーム20が駆動制御され、液滴保治具30が半径方向Aに移動するとともに、シリコンウェーハ10の回転駆動源が駆動制御されシリコンウェーハ10が回転する。シリコンウェーハ10から離れた場所には、薬液40を回収するためのタンク60が設けられている。
【0007】
図2(a)〜(d)、液滴保持具30が薬液40を保持する手順を説明する図で、図3は液滴保持具30の断面を斜視図にて示している。
【0008】
図2(a)、図2(b)に示すように液滴供給アーム20の内部を介して液滴41が液滴保治具30内に供給され液滴排出口30aからシリコンウェーハ10の表面10aに1滴づつ順次滴下される。これによりシリコンウェーハ10上の薬液40が次第に大きくなる。やがて図3に示す排出口R部に薬液40が到達する大きさになると、薬液40において表面張力が発生し液滴保治具30は薬液40をシリコンウェーハ10の表面10aに接触させた状態で保持することが可能となる(図2(c))。
【0009】
以後液滴供給アーム20を駆動制御し液滴保治具30を半径方向Aに移動させれば、薬液40を薬液保治具30と一緒に同方向Aに移動させることができる(図2(d))。
【0010】
つぎに図1の液滴自動走査装置の動作について説明する。
【0011】
図4(a)は液滴保治具30の半径方向の動きを示す斜視図で、図4(b)は薬液40の中心40cがシリコンウェーハ10上で描く軌跡を示している。
【0012】
上述したように薬液保治具30によって薬液40を保持できる状態になったならば、コントローラ50によって液滴供給アーム20が駆動制御され、液滴保持具30がシリコンウェーハ10の中心10cに位置される。そして同図4(a)に示すように、コントローラ50によって回転駆動源が駆動制御されてシリコンウェーハ10が一定速度で回転されるとともに、コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに所定の速度(たとえば1周当たり数mmのピッチで)で移動される。このため液滴保治具30は
、シリコンウェーハ10の半径方向Aに所定速度で移動しながらシリコンウェーハ10の周方向ωに一定速度でシリコンウェーハ10に対して相対的に回転する。この結果、図4(b)に示すように、薬液中心40cは、シリコンウェーハ10の表面10a上で周方向ωに走査され、シリコンウェーハ10の中心10cを起点とする螺旋状の軌跡を描く。
【0013】
図5(a)は薬液中心40cの最後の一周の軌跡を示している。薬液中心40cが走査開始点Sから走査終了点Gまで走査される間に半径方向Aに所定距離進むため、両点の半径方向位置は異なっている。
【0014】
図5(b)は、シリコンウェーハ10の表面のうち薬液40が接触して不純物が薬液40中に溶解し不純物を含む薬液40の回収が行われる薬液回収領域42と、薬液回収領域42以外の薬液未回収領域43の分布を示している。図5(b)に斜線で示す薬液回収領域42は、図5(a)に示す最後の一周の軌跡に応じた形状となっており、シリコンウェーハ10の周方向の各部で半径方向長さが異なっている。
【0015】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の表面平坦部の汚染度合いを評価することができる。
【0016】
つぎにシリコンウェーハ10の面取り部を分析、評価するための装置について説明する。
【0017】
図6は、手動でシリコンウェーハ10の面取り部(エッジ部)の薬液回収を行う手動薬液回収装置を示している。
【0018】
同図6に示すように、シリコンウェーハ10のウェーハ中心10cには専用治具70が、その長手方向がウェーハ面に対して垂直となるように取り付けられる。容器80には船底状の溝81が形成されており溝81には薬液40が貯留されている。シリコンウェーハ10は、垂直に立てられて、面取り部15が薬液40に浸漬される。そしてシリコンウェーハ10を垂直状態に保持しながら手動で専用治具70が90゜回転させられ、シリコンウェーハ10の面取り部15が周方向に1/4周、薬液40が接触し、この領域の面取り部15に付着している不純物が薬液40中に溶解される。図11(b)はシリコンウェーハ10の回収領域44を示している。作業者は、ノッチ17が形成された位置を0゜として、そのノッチ位置(0゜)から専用治具70が1/4周(90゜)回転したことを目視で確認することで薬液回収作業を行う。
【0019】
容器80に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いを評価することができる。なお薬液回収作業はクリーンルーム内で行われる。
【0020】
手動薬液回収装置は、下記特許文献1に開示されている。
【0021】
また下記特許文献2、3には、保持装置と回転装置を設け、保持装置によって図6の手動薬液回収装置と同様にしてシリコンウェーハ10を垂直状態に保持しつつ回転装置によってシリコンウェーハ10を回転させることにより、面取り部(エッジ部)の薬液回収を自動的に行う自動薬液回収装置の構成が開示されている。
【特許文献1】特開2000−77492号公報
【特許文献2】特開平10−92889号公報
【特許文献3】特開平11−204604号公報
【発明の開示】
【発明が解決しようとする課題】
【0022】
つぎに上述した従来技術の問題点について説明する。
【0023】
図1の液滴自動走査装置によれば、図5で説明したように液滴中心40cが最後の一周で螺旋状の軌跡を描くため薬液回収領域42が安定しないという問題がある。このためシリコンウェーハ10の表面平坦部の汚染度合いの分析結果、評価内容に誤差が生じるおそれがある。
【0024】
また液滴保持具30の高さは表面平坦部上で薬液40を保持できる高さに固定されているため、たとえ液滴保持具30を面取り部15まで移動させたとしても面取り部15に薬液40を回り込ませることができない。このため、この液滴自動走査装置を用いて面取り部15の分析、評価を行うことはできなかった。
【0025】
また図6の手動薬液回収装置によれば、人手による回収作業であるため作業者次第で回収領域がばらつき回収領域が安定しないという問題がある。このためシリコンウェーハ10の面取り部15の汚染度合いの分析結果、評価内容に誤差が生じるおそれがある。
【0026】
またシリコンウェーハ10を垂直状態に保持して面取り部15を薬液40に浸漬するため面取り部15以外の領域も薬液に浸漬されてしまうため面取り部15の分析結果、評価を精度よく行うことができない。これを図7を用いて説明する。
【0027】
図7はシリコンウェーハ10の外周部の断面を示している。シリコンウェーハ10は、表面10aのうち平坦になっている表面平坦部11と面取り部15と裏面10bのうち平坦になっている裏面平坦部16とからなる。面取り部15は、表面10aのうち表面平坦部11に対して所定角度でカットされた面を有する表面ベベル部12と、表面平坦部11および裏面平坦部16に対して垂直な面を有する直胴部13と、裏面10bのうち裏面平坦部16に対して所定角度でカットされた面を有する裏面ベベル部14とからなる。
【0028】
シリコンウェーハ10を垂直状態にして面取り部15を薬液40に浸漬させると直胴部15から所定距離ΔX離れた箇所まで薬液40が接触する。薬液回収領域44は面取り部15のみならず表面平坦部11、裏面平坦部16を含んでいる。このため表面平坦部11、裏面平坦部16に付着されている不純物が薬液40中に混入する。特に裏面平坦部16の不純物は、品種依存性が大きくバックサイドダメージ等による裏面特有の不純物を含んでいる。このため汚染度合いの分析結果、評価内容は、裏面1bの汚染度合いの影響を大きく受けることになり、面取り部15の汚染度合いの分析、評価を精度よく行うことができない。
【0029】
また人手による作業のため、たとえクリーンルーム内で作業を行うにせよ、薬液40の上方から薬液40内に落下した不純物によって汚染されるおそれがあり、分析結果、評価内容に誤差が生じるおそれがある。
【0030】
また図11(b)で説明したように目視で回収角度を確認しながら回収するため、回収領域はノッチ17を基準(0゜)として90゜、180゜、270゜、360゜(全周)といった目視で角度が確認可能な領域に制限されてしまう。このように回収開始の角度、回収終了の角度には制限があり、開始角度、終了角度を任意に定め任意の領域について薬液40を回収することができなかった。
【0031】
一方、自動薬液回収装置で面取り部15の薬液40を回収する場合には、手動で行うことによる上述した問題は生じないものの、シリコンウェーハ10を垂直に保持しながら薬液40に浸漬するという手法は変わらないため図7で説明したように面取り部15以外の領域(特に裏面平坦部16)の不純物の影響を受けて分析結果、評価内容の精度が損なわれるという問題は避けられない。またシリコンウェーハ10は垂直姿勢となっているため薬液40の上方にシリコンウェーハ10、装置動作部が位置しているため薬液40中に浸漬部位以外に上方から不純物が混入することが懸念される。
【0032】
また上述したように図1の液滴自動走査装置は、表面平坦部11の薬液40を回収する専用の装置であり、図6の手動薬液回収装置あるいは自動薬液回収装置は、面取り部15の薬液40を回収する専用の装置であるため、表面平坦部11の汚染度合いの分析、評価と面取り部15の汚染度合いの分析、評価の両方を行う場合には、2台の装置を用意し2枚のシリコンウェーハを用意し作業を別々に行わなければならない。このため作業に多大な時間と手間を要し作業効率が大幅に損なわれる。
【0033】
本発明は上述した問題をなくすことを解決課題としてなされたものである。
【0034】
本発明は、面取り部15以外の不純物を薬液40中に混入させないようにして面取り部15の汚染度合いの分析、評価を精度よく行えるようにすることを解決課題とするものである。
【0035】
また本発明は、表面平坦部11のすべての範囲について漏れなく薬液40を回収して表面平坦部11の汚染度合いの分析、評価を精度よく行えるようにすることを解決課題とするものである。
【0036】
また本発明は、1台の装置、1枚のシリコンウェーハ10を用いて表面平坦部11の薬液回収作業と面取り部15の薬液回収作業を連続的に行えるようにして作業効率を高めることを解決課題とするものである。
【0037】
また本発明は、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域を回収できるようにすることを解決課題とするものである。
【課題を解決するための手段】
【0038】
第1発明は、
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
半導体ウェーハの面取り部と前記境界領域との両方に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含むことを特徴とする。
【0039】
第2発明は、
液滴保持具によって、半導体ウェーハの表面に薬液を接触させた状態で、液滴保持具を半導体ウェーハの半径方向に移動させつつ半導体ウェーハの周方向に相対的に回転させることにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収装置において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に薬液が接触できる半径方向位置に、液滴保持具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第1の制御手段と、
半導体ウェーハの面取り部と前記境界領域との両方に薬液が接触できる半径方向位置に、液滴保治具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第2の制御手段と
を備えたことを特徴とする。
【0040】
第3発明は、第2発明において、
第2の制御手段は、薬液が面取り部に回り込むように、液滴保治具と半導体ウェーハとの距離を調整することを特徴とする。
【0041】
第4発明は、第2発明において、
第2の制御手段は、液滴保治具を半導体ウェーハの周上の所望の開始点から終了点に至るまで周方向に相対回転させることを特徴とする。
【0042】
第1発明〜第4発明によれば、図8(a)、(b)に示すように、半導体ウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に、薬液40の半径方向位置(薬液中心40cのウェーハ中心10cからの距離R)が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。
【0043】
つぎに図9に示すように、半導体ウェーハ10の面取り部15と境界領域11aとの両方に接触できる位置に、薬液40の半径方向位置が位置決めされ、周方向ωに走査され、不純物を含む薬液40が回収される。
【0044】
第3発明では、図9に示すように、薬液40が面取り部15に回り込むように、液滴保治具30と半導体ウェーハ10との距離が調整される。具体的には液滴保治具30の高さが調整される。
【0045】
第4発明では、図9において周方向ωの走査を行う際に、図11(a)に示すように、液滴保治具30は半導体ウェーハ10の周上の所望の開始点S2から終了点G2に至るまで周方向に相対回転される。
【0046】
第5発明は、
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、ウェーハ中心から面取り部との境界領域に至るまでは、薬液を半径方向に移動させながら、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
薬液の半径方向位置が、前記面取り部との境界領域に接触できる位置に到達した時点で、薬液の半径方向位置を固定し、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含むことを特徴とする。
【0047】
第5発明によれば、図4(a)、(b)に示すように、半導体ウェーハ10の表面平坦部11のうち、ウェーハ中心10cから面取り部15との境界領域に至るまでは、薬液40を半径方向Aに移動させながら、周方向ωに走査されて、不純物を含む薬液40が回収される。つぎに図8(a)、(b)に示すように、薬液40の半径方向位置が、面取り部15との境界領域11aに接触できる位置に到達した時点で、薬液40の半径方向位置が固定(距離R一定)されて、周方向ωに走査され、不純物を含む薬液40が回収される。
【発明の効果】
【0048】
第1発明〜第4発明によれば、図10に示すように、薬液40がシリコンウェーハ10の周方向全域にわたり面取り部15と境界領域11aの両方(薬液回収領域46)に接触して面取り部15に付着している不純物が薬液40中に溶解される。ここで境界領域11aに付着していた不純物は、前工程つまり図8(a)に示す表面平坦部11の最後の回収工程で既に回収済みである。したがって図10のように薬液40の一部が境界領域11aに接触していても境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に溶解することになる。以上のようにシリコンウェーハ10の面取り部15の不純物のみを薬液40中に溶解させるようにしたので、面取り部15の汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0049】
また第1発明〜第4発明によれば、一台の液滴自動走査装置(図1)を用い一枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について薬液回収を連続的に行うことができるため、作業効率が飛躍的に向上する。
【0050】
また第4発明によれば、図11(a)に示すように、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域46を回収することができるようになったため、薬液回収領域の指定の自由度が向上する。
【0051】
また第5発明によれば、表面平坦部11のすべての範囲について漏れなく薬液40を回収することができるので、表面平坦部11の汚染度合いの分析、評価を精度よく行うことができる。
【0052】
更に、第1発明〜第4発明によれば、1枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について汚染度合いを分析、評価できるため、表面平坦部11、面取り部15毎に複数毎のウェーハを用いてウェーハの汚染度合いを分析、評価する従来技術と比較して、分析、評価の精度を高めることができる。
【発明を実施するための最良の形態】
【0053】
以下図面を参照して本発明に係る半導体ウェーハの薬液回収方法および装置を実施する上で最良の形態について説明する。
【0054】
本実施形態では、図1に示される液滴自動走査装置が用いられる。図1に示す液滴自動走査装置によって表面平坦部11の回収作業と面取り部15の回収作業が1枚のシリコンウェーハ10を用いて連続的に行われる。
【0055】
図1(a)は液滴自動走査装置の上面図を示し、図1(b)は液滴自動走査装置の斜視図を示している。
【0056】
これら図1(a)、(b)に示すように、シリコンウェーハ10の裏面10aは、図示しないチャックにより水平姿勢となるように把持されるとともに、回転自在に支持されている。シリコンウェーハ10の表面10a側には、液滴供給アーム20と液滴保持具30が配置されている。液滴供給アーム20の先端には液滴保持具30がバキュームによりチャックされている。液滴供給アーム20は、液滴保持具30を、シリコンウェーハ10の中心10cから同ウェーハ10の半径方向Aに移動させる自由度を有している。また液滴供給アーム20は、液滴保治具30を高さ方向Hに移動させる自由度を有している。液滴保治具30の高さが調整されることによってシリコンウェーハ10の表面10aから液滴保治具30の薬液排出口30aまでの距離が任意の大きさに調整される。
【0057】
コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに移動するとともに高さ方向Hに移動する。またコントローラ50によってシリコンウェーハ10の回転駆動源が駆動制御されシリコンウェーハ10が回転する。シリコンウェーハ10から離れた場所には、薬液40を回収するためのタンク60が設けられている。
【0058】
図2(a)〜(d)は液滴保持具30が薬液40を保持する手順を説明する図で、図3は液滴保持具30の断面を斜視図にて示している。
【0059】
図2(a)、図2(b)に示すように液滴供給アーム20の内部を介して液滴41が液滴保治具30内に供給され液滴排出口30aからシリコンウェーハ10の表面10aに1滴づつ順次滴下される。これによりシリコンウェーハ10上の薬液40が次第に大きくなる。やがて図3に示す排出口R部に薬液40が到達する大きさになると、薬液40において表面張力が発生し液滴保治具30は薬液40をシリコンウェーハ10の表面10aに接触させた状態で保持することが可能となる(図2(c))。
【0060】
以後液滴供給アーム20を駆動制御し液滴保治具30を半径方向Aに移動させれば、薬液40を薬液保治具30と一緒に同方向Aに移動させることができる(図2(d))。
【0061】
つぎに図1の液滴自動走査装置の動作について説明する。
【0062】
(実施例1)
(表面平坦部11の回収)
図4(a)は液滴保治具30の半径方向の動きを示す側面図で、図4(b)は薬液40の中心40cがシリコンウェーハ10上で描く軌跡を示している。
【0063】
表面平坦部11の薬液回収時には、液滴保持具30の高さは、表面平坦部11上に薬液40を接触させた状態で保持できる高さに調整されている。
【0064】
図2(a)〜(c)に示す手順を経て液滴保治具30によって薬液40を保持できる状態になったならば、コントローラ50によって液滴供給アーム20が駆動制御され、液滴保持具30がシリコンウェーハ10の中心10cに位置される。そして図4(a)に示すように、コントローラ50によって回転駆動源が駆動制御されてシリコンウェーハ10が一定速度で回転されるとともに、コントローラ50によって液滴供給アーム20が駆動制御されて液滴保治具30が半径方向Aに所定の速度(たとえば1周当たり数mmのピッチ)で移動される。このため液滴保治具30は、シリコンウェーハ10の半径方向Aに所定速度で移動しながらシリコンウェーハ10の周方向ωに一定速度でシリコンウェーハ10に対して相対的に回転する。この結果、図4(b)に示すように、薬液中心40cは、シリコンウェーハ10の表面10a上で周方向ωに走査され、シリコンウェーハ10の中心10cを起点とする螺旋状の軌跡を描く。
【0065】
コントローラ50は、液滴保治具30の半径方向位置が、シリコンウェーハ10の表面平坦部11のうち、面取り部15との境界領域に接触できる位置に達したならば、液滴保治具30の半径方向Aの移動を停止して半径方向位置を保持する。このときのシリコンウェーハ10と液滴保治具30の位置関係を図8(b)に示す。
【0066】
つぎにコントローラ50は、薬液40の半径方向Aの位置を図8(b)に示す位置に位置決めし保持した状態で、シリコンウェーハ10を1回転させる。このため図8(a)に示すように薬液中心40cは開始点S1から完了点G1に至るまで同じ半径距離Rを保持しながら周方向ωに走査される。薬液中心40cはウェーハ中心10cを中心とした真円を描く。これにより表面平坦部11のうち面取り部15との境界領域の不純物が薬液40中に溶解される。なお開始点S1から完了点G1までの走査を2回以上行ってもよく、開始点S1から完了点G1まで走査した後に完了点G1から開始点S1に戻るように走査してもよい。
【0067】
以上のようにしてシリコンウェーハ10の表面平坦部11の全ての範囲について漏れなく薬液40を回収することができる。薬液回収領域45は、図8(a)に示すように表面1aのうち面取り部15(斜線で示す)を除いた全ての部分(表面平坦部11)である。
【0068】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の表面平坦部11の汚染度合いを評価することができる。
【0069】
以上のようにシリコンウェーハ10の表面平坦部11の全ての範囲について漏れなく薬液40を接触させるようにしたので、表面平坦部11の汚染度合いの分析、評価をきわめて安定して精度よく行うことができる。
【0070】
図5(a)、(b)に示す従来技術と比較すると、従来技術では、薬液中心40cが最後の一周で螺旋状の軌跡を描くため表面平坦部11のすべての部分について薬液40を回収しきれないという問題があったが、本実施形態によれば、面取り部15との境界領域に接触できる位置に薬液40を保持した状態で真円の軌跡を描くようにしたため表面平坦部11の全ての範囲について薬液40を回収することができる。
【0071】
(面取り部15の回収)
図9は面取り部15の薬液回収時の液滴保治具30とシリコンウェーハ10の位置関係を示す側面図であり、図10はシリコンウェーハ10の外周部と薬液40との位置関係を示す側面図である。
【0072】
上述したように表面平坦部11の薬液回収が終了すると、コントローラ50は、引き続き図9に示すように、さらに液滴保治具30を半径方向Aに移動させるとともに液滴保治具30の高さを低くして、薬液40が、シリコンウェーハ10の面取り部15と、表面平坦部11のうち面取り部15との境界領域11aの両方に接触できるように位置させる。このように薬液40が、面取り部15と境界領域11aの両方に接触できる状態になったならば、コントローラ50は、液滴保治具30の半径方向Aの移動と高さ方向Hの移動を停止する。
【0073】
つぎにコントローラ50は、液滴保治具30の半径方向位置、高さを図9に示す位置、高さに位置決めし保持した状態で、シリコンウェーハ10を1回転させて液滴中心40cをシリコンウェーハ10の周方向ωに走査する。なお走査を2周以上行ってもよく、開始点から完了点まで走査した後に完了点から開始点に戻るように走査してもよい。
【0074】
これにより図10に示すように、薬液40がシリコンウェーハ10の周方向全域にわたり面取り部15と境界領域11aの両方(薬液回収領域46)に接触して面取り部15に付着している不純物が薬液40中に溶解される。ここで境界領域11aに付着していた不純物は、前工程つまり図8(a)に示す表面平坦部11の最後の回収工程で既に回収済みである。したがって図10のように薬液40の一部が境界領域11aに接触していても境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に溶解することになる。
【0075】
不純物が溶解した薬液40は、液滴保持具30に保持されたままタンク60まで運ばれタンク60内に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いを評価することができる。
【0076】
以上のようにシリコンウェーハ10の面取り部15の不純物のみを薬液40中に溶解させるようにしたので、面取り部15の汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0077】
ここで図7に示す従来技術と比較すると、従来技術では、シリコンウェーハ10を垂直姿勢にして薬液40に浸漬させるという手法をとっていたため、裏面平坦部16、表面平坦部11における不純物や上方からの落下による不純物が薬液40中に混入して面取り部15の汚染度合いの分析、評価を精度よく行うことができなかったが、本実施形態によれば、薬液40が面取り部15および境界部11aのみ(薬液回収領域46)に接触するがそのうち境界部11aにおける不純物はすでに回収済みであるため面取り部15の不純物のみを薬液40中に取り込むことができ汚染度合いの分析、評価をきわめて精度よく行うことができる。
【0078】
つぎに薬液40の組成について説明する。
【0079】
図9に示すように、薬液40を表面平坦部11側から面取り部15に回り込ませるためには、薬液40の組成として、シリコンウェーハ10に対する密着性が高いものであることが望ましい。
【0080】
薬液40の密着性は、薬液40の粘性および酸化性を高くすることによって増大させることができる。すなわち薬液40の粘性を高めることによって密着性を高めることができる。また薬液40の酸化性を増大させることによって親水性を増大させ密着性を高めることができる。
【0081】
実験では、図9に示すように、薬液40を表面平坦部11側から面取り部15に回り込ませることができる粘性を得るように調合されたフッ酸と硝酸からなる水溶液の薬液40を使用した。これにより、良好な密着性が得られた。
【0082】
(実施例2)
上述した実施例1では、表面平坦部11における薬液回収を行う際に、面取り部15との境界領域に至るまでは図4(b)に示すように、薬液40を半径方向Aに一定速度で移動させながら周方向に走査させることで螺旋状の軌跡を描かせるようにしている。
【0083】
しかし、液滴40の半径方向位置を固定した状態で周方向に走査し1周以上走査後に所定ピッチ半径方向に移動させ、同じく半径方向位置を固定した状態で周方向に走査させる動作を繰り返し行うようにして真円の軌跡を描かせるようにしてもよい。表面平坦部11のすべての範囲について薬液回収を漏れなく行えるのであれば、薬液40(薬液中心40c)の軌跡は図4(b)に示す螺旋状に限定されるわけではない。
【0084】
(実施例3)
上述した実施例1、2では、表面平坦部11の全面について薬液40を走査し(図4(b)、図8(a))、その後に、面取り部15の走査(図9)に移行するようにしているが、表面平坦部11の汚染度合いの分析、評価は不要であって面取り部15の汚染度合いのみについて分析、評価を行う場合であれば、必ずしも表面平坦部11の全面について薬液40を走査する必要はなく、図4(b)に示す走査は省略することにし図8(a)に示すように表面平坦部11のうち面取り部15との境界領域のみについて薬液40を走査することにし、その後に面取り部15の走査(図9)に移行する実施も可能である。
【0085】
この実施例3の処理手順について説明する。
【0086】
最初に薬液中心40cはウェーハ中心10cではなく図8(a)に示す開始点S1に位置され開始点S1を起点にして走査を開始して終了点G1まで周方向ωに走査される。これにより表面平坦部11のうち面取り部15との境界領域のみについて薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。つぎに図9に示す面取り部15の走査(図9)に移行する。面取り部15および境界領域11aに薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いが評価される。
【0087】
この実施例3においても、図10に示すように薬液40が面取り部15と境界領域11aの両方(薬液回収領域46)に接触することになるが、境界領域11aに付着していた不純物は、図8(a)に示すように表面平坦部11のうち面取り部15との境界領域を薬液40が走査することによって既に回収済みであるため、境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に取り込まれることになり、シリコンウェーハ10の面取り部15の汚染度合いの分析、評価が精度よく行われる。
【0088】
(実施例4)
面取り部15の薬液回収領域46は、シリコンウェーハ10の全周にわたる領域であってもよく、シリコンウェーハ10の周方向の一部の円弧状の領域であってもよい。
【0089】
たとえば図11(a)に示すように、シリコンウェーハ10の周上の任意の所望する点(角度)に、回収の開始点S2、回収の終了点G2を定めて、これら開始点S2から終了点G2までの領域46のみについて薬液40を回収してもよい。開始点S2は、ノッチ17の位置から外れた位置に定めることができる。
【0090】
この実施例4の手順について説明する。
【0091】
薬液中心40cは図8(a)に示すように、完了点G1に至るまで周方向ωに走査される。完了点G1は、周上の位置(回転角度)が図11(a)の回収開始点S2に一致するように定められる。これにより表面平坦部11に薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。
【0092】
図8(a)に示す表面平坦部11の走査が終了すると、薬液中心40cの周上の位置(回転角度)(G1)を保持しながらそのまま薬液中心40cを半径方向Aに移動させて回収開始点S2に位置させ図9に示す状態に保持する。そして薬液中心40cを周方向ωに回収終了点G2まで走査して、図11(b)に示すように開始点S2から終了点G2までの領域46について面取り部15の薬液回収を行う。 開始点S2、終了点G2の周上位置は、シリコンウェーハ10の回転角度に置き換えることができる。たとえばシリコンウェーハ10の現在の回転角度を検出するセンサが設けられ、センサの検出結果がコントローラ50にフィードバックされる。コントローラ50は、フィードバックされたウェーハ回転角度に基づいて薬液中心40cが開始点S2(開始回転角度)から終了点G2(終了回転角度)まで移動するようにシリコンウェーハ10の回転を制御する。
【0093】
これにより面取り部15および境界領域11aに薬液40が接触し不純物が薬液40中に溶解する。不純物が溶解した薬液40はタンク60に回収される。タンク60に回収された薬液40を分析することによりシリコンウェーハ10の面取り部15の汚染度合いが評価される。
【0094】
この実施例4においても、図10に示すように薬液40が面取り部15と境界領域11aの両方(薬液回収領域46)に接触することになるが、境界領域11aに付着していた不純物は、図8(a)に示すように表面平坦部11のうち面取り部15との境界領域を薬液40が走査することによって既に回収済みであるため、境界領域11aにおける不純物は薬液40中に混入されることなく面取り部15に付着している不純物のみが薬液40中に取り込まれることになり、シリコンウェーハ10の面取り部15の汚染度合いの分析、評価が精度よく行われる。
【0095】
さらに本実施例4によれば、薬液回収領域が従来技術(図11(b))のように、目視で角度が確認可能な領域44に制限されてしまうことがなく、開始点S2、終了点G2を任意に定め任意の領域46について回収することができ回収領域の自由度を高めることができる。たとえばシリコンウェーハ10をチャックした箇所など特定の薬液回収領域46をピンポイントで指定でき、特定の領域の汚染度合いを評価することが可能となる。
【0096】
なおこの実施例4では、図11(a)に示すように面取り部15の薬液回収は周上の一部の円弧状の領域46に限られるため、図8(a)で面取り部15との境界領域を走査を行う際には、図11(a)の領域46に対応する内側の円弧状の領域のみを走査してもよい。
【0097】
以上説明したように本実施形態によれば、面取り部15以外の不純物が薬液40中に混入しないため面取り部15の汚染度合いの分析、評価を精度よく行うことができる。
【0098】
また本実施形態によれば、一台の液滴自動走査装置(図1)を用い一枚のシリコンウェーハ10を用いて、表面平坦部11と面取り部15の双方について薬液回収を連続的に行うことができるため、作業効率が飛躍的に向上する。
【0099】
なお本実施形態で説明した動作は、既存の液滴自動操作装置のコントローラ50内の制御プログラムを変更することで実現される。液滴保治具30を半径方向A、高さ方向Hに移動させる制御内容を変更したプログラムをコントローラ50にインストールするという簡易な改造で対処することができるので、装置開発に要するコストを飛躍的に低減させることができる。なお本実施形態では、シリコンウェーハ10を回転させることで液滴保治具30の周方向ωの走査を実現させているが、シリコンウェーハ10を回転させる代わりに液滴供給アーム20を回転させることで液滴保治具30の周方向ωの走査を実現させてもよい。同様に液滴供給アーム20を移動させる代わりにシリコンウェーハ10を移動させて、液滴保治具30のシリコンウェーハ10に対する半径方向Aの相対的な移動を実現させてもよい。
【0100】
また本実施形態によれば、面取り部15の薬液40を回収するに際して回収開始点、回収終了点を任意に定め任意の領域を回収することができるようになったため、薬液回収領域の指定の自由度が向上する。
【0101】
(実施例5)
上述した実施形態では、面取り部15の薬液回収を行う場合を想定して説明したが、面取り部15の汚染度合いの分析、評価は不要であって表面平坦部11の汚染度合いの分析、評価のみを行う場合には、図8(a)に示す表面平坦部11のうち面取り部15との境界領域の走査を終了し薬液40をタンク60に回収した後は、図9に示す面取り部15の走査に移行させないまま処理を終了させてもよい。この実施例5によれば、表面平坦部11のすべての範囲について漏れなく薬液40を回収することができるので、表面平坦部11の汚染度合いの分析、評価を精度よく行うことができる。
【産業上の利用可能性】
【0102】
本実施形態では、シリコンウェーハを対象として説明したがシリコンウェーハ以外の半導体ウェーハ、たとえばガリウム砒素ウェーハを対象として実施することができる。
【図面の簡単な説明】
【0103】
【図1】図1(a)、(b)は液滴自動走査の構成を示す図である。
【図2】図2(a)〜(d)は液滴保治具が液滴を保持する動作を説明する図である。
【図3】図3は液滴保治具の内部を示す斜視図である。
【図4】図4(a)、(b)はシリコンウェーハに対する薬液中心の動きを説明する図である。
【図5】図5(a)、(b)は従来技術を説明する図でシリコンウェーハに対する薬液中心の動きを説明する図である。
【図6】図6は従来技術を説明する図で手動薬液回収装置の動作を説明する図である。
【図7】図7は図6の手動薬液回収装置で回収される領域を示す図である。
【図8】図8(a)、(b)は薬液が表面平坦部のうち面取り部との境界領域に接触できる半径方向位置に位置決めされた状態で周方向に走査される動作を説明する図である。
【図9】図9は薬液が面取り部と、表面平坦部のうち面取り部との境界領域の両方に接触できる状態になっていることを示す図である。
【図10】図10は図9に示す状態に位置決めされたときの薬液回収領域を示す図である。
【図11】図11(a)は実施形態で回収することが可能な薬液回収領域を示す図で、図11(b)は従来技術で回収することが可能な薬液回収領域を示す図である。
【符号の説明】
【0104】
10 シリコンウェーハ
11 表面平坦部
11a 境界領域
15 面取り部
30 液滴保治具
50 コントローラ(第1の制御手段、第2の制御手段)
【特許請求の範囲】
【請求項1】
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
半導体ウェーハの面取り部と前記境界領域との両方に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含む半導体ウェーハの薬液回収方法。
【請求項2】
液滴保持具によって、半導体ウェーハの表面に薬液を接触させた状態で、液滴保持具を半導体ウェーハの半径方向に移動させつつ半導体ウェーハの周方向に相対的に回転させることにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収装置において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に薬液が接触できる半径方向位置に、液滴保持具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第1の制御手段と、
半導体ウェーハの面取り部と前記境界領域との両方に薬液が接触できる半径方向位置に、液滴保治具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第2の制御手段と
を備えた半導体ウェーハの薬液回収装置。
【請求項3】
第2の制御手段は、薬液が面取り部に回り込むように、液滴保治具と半導体ウェーハとの距離を調整することを特徴とする請求項2記載の半導体ウェーハの薬液回収装置。
【請求項4】
第2の制御手段は、液滴保治具を半導体ウェーハの周上の所望の開始点から終了点に至るまで周方向に相対回転させることを特徴とする請求項2記載の半導体ウェーハの薬液回収装置。
【請求項5】
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、ウェーハ中心から面取り部との境界領域に至るまでは、薬液を半径方向に移動させながら、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
薬液の半径方向位置が、前記面取り部との境界領域に接触できる位置に到達した時点で、薬液の半径方向位置を固定し、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含む半導体ウェーハの薬液回収方法。
【請求項1】
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
半導体ウェーハの面取り部と前記境界領域との両方に接触できる位置に、薬液の半径方向位置を位置決めし、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含む半導体ウェーハの薬液回収方法。
【請求項2】
液滴保持具によって、半導体ウェーハの表面に薬液を接触させた状態で、液滴保持具を半導体ウェーハの半径方向に移動させつつ半導体ウェーハの周方向に相対的に回転させることにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収装置において、
半導体ウェーハの表面平坦部のうち、面取り部との境界領域に薬液が接触できる半径方向位置に、液滴保持具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第1の制御手段と、
半導体ウェーハの面取り部と前記境界領域との両方に薬液が接触できる半径方向位置に、液滴保治具を位置決めし、液滴保治具を半導体ウェーハの周方向に相対回転させることにより、不純物を含む薬液を回収する第2の制御手段と
を備えた半導体ウェーハの薬液回収装置。
【請求項3】
第2の制御手段は、薬液が面取り部に回り込むように、液滴保治具と半導体ウェーハとの距離を調整することを特徴とする請求項2記載の半導体ウェーハの薬液回収装置。
【請求項4】
第2の制御手段は、液滴保治具を半導体ウェーハの周上の所望の開始点から終了点に至るまで周方向に相対回転させることを特徴とする請求項2記載の半導体ウェーハの薬液回収装置。
【請求項5】
半導体ウェーハの表面に薬液を接触させた状態で、薬液を周方向に走査することにより、不純物を含む薬液を回収するようにした半導体ウェーハの薬液回収方法において、
半導体ウェーハの表面平坦部のうち、ウェーハ中心から面取り部との境界領域に至るまでは、薬液を半径方向に移動させながら、周方向に走査することにより、不純物を含む薬液を回収する第1の工程と、
薬液の半径方向位置が、前記面取り部との境界領域に接触できる位置に到達した時点で、薬液の半径方向位置を固定し、周方向に走査することにより、不純物を含む薬液を回収する第2の工程と
を含む半導体ウェーハの薬液回収方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−13234(P2006−13234A)
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願番号】特願2004−190031(P2004−190031)
【出願日】平成16年6月28日(2004.6.28)
【出願人】(000184713)コマツ電子金属株式会社 (265)
【Fターム(参考)】
【公開日】平成18年1月12日(2006.1.12)
【国際特許分類】
【出願日】平成16年6月28日(2004.6.28)
【出願人】(000184713)コマツ電子金属株式会社 (265)
【Fターム(参考)】
[ Back to top ]