
半導体ウェーハ搬送装置及びこれを用いた搬送方法
【課題】半導体ウェーハ搬送装置の自己診断及び自動補正において、停止時間を短縮し、メンテナンスを簡略化し、半導体ウェーハ搬送装置の原価を低減する。
【解決手段】ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有する。
【解決手段】ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハ搬送装置及びこれを用いた搬送方法に関する。
【背景技術】
【0002】
半導体ウェーハ搬送装置において、ウェーハの高精度搬送を保証するため、ロボットの搬送位置の自動補正、搬送ルートからのズレを検出する自己診断等の手段がある。これら手段には、従来、主に下記の三つの手法が提案されている。
【0003】
(1)ハンド先端にセンサを備え、自動教示用ターゲットを検出して位置を補正する。
【0004】
(2)センサを備えた自動教示用擬似ウェーハをターゲットに搬送して位置を補正する。
【0005】
(3)光センサを備えた装置でハンド位置を検出し、位置ズレから異常を判断する。
【0006】
上記(1)〜(3)は、それぞれ、特許文献1〜3に記載されている。
【0007】
特許文献1には、ウェーハの処理を行う半導体製造装置と前記半導体製造装置にウェーハを供給し、処理されたウェーハを回収するウェーハ収納カセット部との間に、ウェーハの搬送室を形成するミニエン筐体を設け、このミニエン筐体内にウェーハハンドリング機構を備えたウェーハ搬送ロボットを配置し、ウェーハ搬送ロボットのハンド部に設けた検出器と、ミニエン筐体内に設置された基準スリット(自動教示用ターゲット)を検出し、基準スリットの位置に基づいてウェーハ搬送ロボットの移動方向を制御するウェーハ搬送装置が開示されている。
【0008】
特許文献2には、搬送アームを介して基板を載置台の上方に搬送し、載置台を貫通する昇降可能な複数の支持ピン上に基板を載せ、搬送アームを載置台外に戻す一方、支持ピンを下降させて載置台上に基板を載置する基板搬送装置において、基板と同程度の大きさの円板(自動教示用擬似円板)を治具として用意して搬送アームの後退許可位置を求める技術が開示されている。この技術では、上記円板には中央部に形成した透孔を通して下方を視認可能にカメラを搭載すると共に、上記複数の支持ピンを緩く挿通させるよう上記円板に形成した複数の挿通孔のうちの少なくとも一つに対し、支持ピンの有無を検出可能な検出手段を設け、搬送アームと支持ピンとを水平面内で相対移動させて、カメラで監視しながら円板の中心を既知の中心ターゲットに一致させ、搬送アームと支持ピンとを上下方向に相対移動させて、支持ピンの先端を検出手段で検出する。そして、支持ピン先端の検出位置から少なくとも搬送アームの厚み分を越える分だけ、相対的に搬送アームを円板に対し移動させた位置を演算により求め、搬送アームの後退許可位置とする。
【0009】
特許文献3には、チャンバへの処理部材の搬入出をアームロボットによって行う部材搬送システムにおいて、アームロボットのアームに設定したアーム基準点の位置を計測し、アーム基準点がチャンバ内に設定されたチャンバ基準点に一致した時点で得られるアーム基準点の座標位置を元にアームロボットの制御を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2009−16604号公報
【特許文献2】特開2003−218186号公報
【特許文献3】特開平11−254359号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記の従来技術において、搬送装置の自己診断及び自動補正は、装置の導入時、及び、装置の可動を止めるメンテナンス時に自動教示用の装置を利用して行っていた。また、その際、ロボットの動作精度確認は、専用の治具や専用のセンサを使用して行う必要があった。
【0012】
本発明は、半導体ウェーハ搬送装置の自己診断及び自動補正において、停止時間を短縮し、メンテナンスを簡略化し、半導体ウェーハ搬送装置の原価を低減することを目的とする。
【課題を解決するための手段】
【0013】
本発明の半導体ウェーハ搬送装置は、ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有することを特徴とする。
【発明の効果】
【0014】
本発明によれば、半導体ウェーハ搬送装置の搬送ロボット部に設置されたハンドの位置検出に、ロードポート部およびアライナが持つセンサを使用することができ、自己診断及び自動補正のために特別な装置(専用の治具等)を設置する必要がなくなり、装置の原価を低減することができる。
【0015】
また、本発明によれば、半導体ウェーハ搬送装置単体で自己診断及び自動補正を行うため、半導体ウェーハ搬送装置の待機時間中に自己診断及び自動補正を行い、メンテナンス時間を短縮することも可能となる。
【図面の簡単な説明】
【0016】
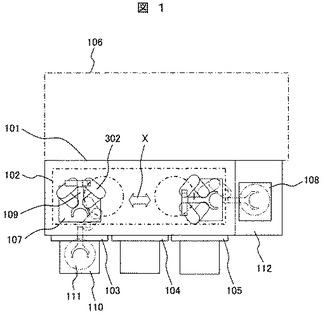
【図1】本発明に係る半導体ウェーハ搬送装置を示す平面図である。
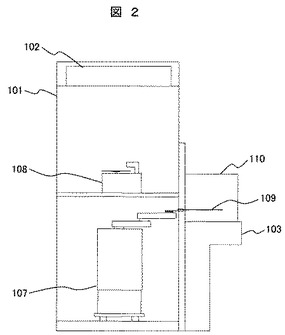
【図2】本発明に係る半導体ウェーハ搬送装置を示す側面図である。
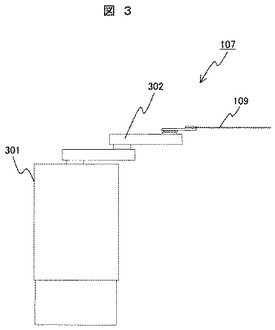
【図3】本発明に係る搬送ロボット部を示す概略側面図である。
【図4】本発明に係るアライナを示す概略斜視図である。
【図5】本発明に係るロードポート部を示す概略斜視図である。
【図6】本発明に係るロードポート部を示す概略背面図である。
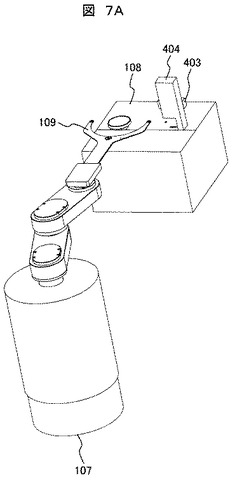
【図7A】本発明に係るアライナによるハンドの位置検出動作を示す斜視図である。
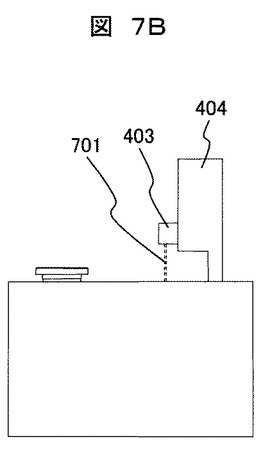
【図7B】本発明に係るアライナ及び遮光検出センサを示す側面図である。
【図7C】本発明に係るアライナ及び遮光検出センサによるハンドの位置検出動作を示す側面図である。
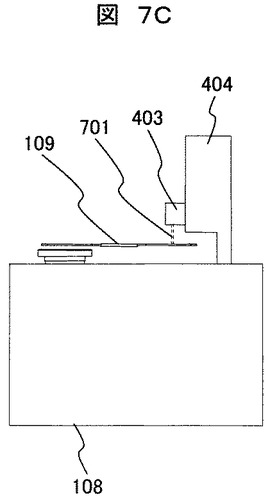
【図8】本発明に係るロードポート部によるハンドの位置検出動作を示す断面図である。
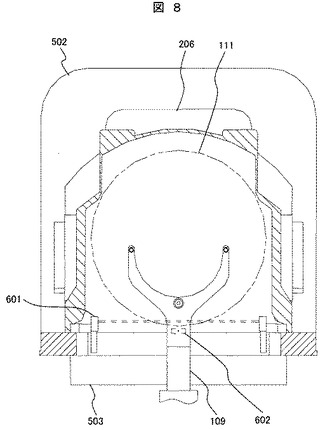
【図9A】本発明による実施例のハンドを示す上面図である。
【図9B】本発明による実施例のハンドを示す側面図である。
【図10】本発明による実施例のミニエン試料搬送システムのセンサ及び制御部等を示す構成図である。
【図11】本発明による実施例のアライナにおいてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【図12】本発明による実施例のロードポート部においてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態である半導体ウェーハ搬送装置及びこれを用いた搬送方法について説明する。
【0018】
本実施形態は、基本的に次のように構成する。
【0019】
前記半導体ウェーハ搬送装置は、ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含み、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有する。そして、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有する。また、前記コントローラは、前記ハンドの計測位置に基づいて、前記搬送ロボット部の所定の位置から前記ロードポート部又は前記アライナに至るまでの駆動制御量を演算し、この演算値に基づいて前記ロードポート部又は前記アライナに対する前記ハンドの相対位置を算出し、この算出値に基づいて前記ハンドの位置の補正を行う。
【0020】
前記半導体ウェーハ搬送装置において、前記センサは、前記アライナにおける前記ウェーハの有無を検出するためのウェーハ検出用センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記ウェーハ検出用センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記アライナに対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0021】
前記半導体ウェーハ搬送装置において、前記センサは、前記ロードポート部の水平方向遮光検出センサ及び垂直方向遮光検出センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記水平方向遮光検出センサ及び前記垂直方向遮光検出センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0022】
前記半導体ウェーハ搬送装置において、前記垂直方向遮光検出センサは、ウェーハ飛び出しセンサであり、前記コントローラは、前記ウェーハ飛び出しセンサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0023】
前記半導体ウェーハ搬送装置は、前記補正を前記ウェーハの搬送を行わない待機時間中に行う。
【0024】
前記半導体ウェーハ搬送装置において、前記コントローラは、前記センサを用いて計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置と、前記エンコーダを用いて検出した前記モータの駆動量から計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置との差が、異常値を越えた場合に異常と判断する。
【0025】
前記半導体ウェーハ搬送装置において、前記ハンドは、アライナ又はロードポート部の前記センサの投光器から受光器に向かって発せられた光を通過させるための貫通穴を有する。
【0026】
前記半導体ウェーハ搬送装置を用いた搬送方法は、前記半導体ウェーハ搬送装置を用いて、前記補正を行い、搬送ルートを決定して前記ウェーハを搬送する。
【0027】
以下、図を用いて本発明の実施例を説明する。
【実施例1】
【0028】
半導体製造装置へウェーハを供給し、また、排出する半導体ウェーハ搬送装置において、主な搬送は、FOUP(Front Opening Unified Pod)からウェーハを取出し、半導体製造装置に供給し、半導体製造装置から排出されたウェーハを取出し、FOUPに収納するものである。このような半導体ウェーハ搬送装置をミニエン試料搬送システムと称する。なお、FOUPは、ウェーハ収納容器と呼んでもよい。
【0029】
図1は、本発明に係るミニエン試料搬送システムを示す平面図である。
【0030】
図2は、本発明に係るミニエン試料搬送システムを示す側面図である。
【0031】
ミニエン試料搬送システム(以下、EFEM(Equipment Front End Module)と称する。)は、ミニエン筐体101、FFU部102(Fan Filter Unit)、ロードポート部103、104、105、搬送ロボット部107、アライナ108及びコントローラ112を含む。半導体製造装置106(半導体検査装置ともいう。)は、EFEMの上位装置である。
【0032】
ミニエン筐体101は、FFU部102、搬送ロボット部107、アライナ108及びコントローラ112を含む。そして、ミニエン筐体101は、システム外部を固定板(外装カバー)で覆い、外部と隔離した空間を提供する。また、ミニエン筐体101は、ロードポート部103、104、105から半導体製造装置106にウェーハを供給する接続部の機能も有する。
【0033】
FFU部102は、送風ファンとフィルターとを含み、ミニエン筐体101の上部に設置され、クリーンエアをダウンフローすることによりミニエン筐体101内にクリーン環境を実現する。
【0034】
ロードポート部103、104、105は、FOUP固定台とFOUP蓋開閉機構とを含む。そして、ロードポート部103、104、105は、ミニエン筐体101に接続され、半導体製造装置106及びミニエン筐体101の試料搬送口の役割を担う。
【0035】
搬送ロボット部107は、ウェーハを把持するためのハンド109を含み、水平方向への移動(水平移動)、上下方向への移動(上下移動)及び旋回動作を行うことができるようになっている。そして、搬送ロボット部107は、ロードポート部103、104、105と半導体製造装置106との間でウェーハの搬送を行う。
【0036】
コントローラ112は、半導体製造装置106(上位装置)との通信、各機構の制御を行い、ミニエン搬送システムのコントロールを行う。
【0037】
以下、本発明の実施例であるEFEMを用いたウェーハ搬送シーケンスの概略を示す。
【0038】
図1において、搬送ロボット部107は、ロードポート部103、104、105に設置されたFOUP110からアーム302及びハンド109を介してウェーハ111を取出し、必要に応じて水平移動(X方向移動)、及び上昇動作を行ってアライナ108に搬送する。ウェーハ111は、アライナ108で方向決めされた後、再度搬送ロボット107のハンドリングにより半導体製造装置106の接続部(図示省略)に搬送される。また、搬送ロボット部107は、半導体製造装置106で所定の処理を施したウェーハ111を接続部から回収し、ロードポート部103、104、105に設置されたFOUP110に搬送し、収納する。
【0039】
図3は、本発明に係る搬送ロボット部を示す概略側面図である。
【0040】
搬送ロボット部107は、本体301と、ロボット本体301の上部のアーム302と、アーム302の先端に設置したハンド109とを含む。搬送ロボット部107は、ハンド203でウェーハを把持し、ロボット本体301の昇降動作、水平移動及び旋回動作、並びにアーム202の水平伸縮によりウェーハを搬送する。これらの動作はすべて、モータの回転を伝達することによって行われる。モータの回転位置は、エンコーダを用いて検出することができる。
【0041】
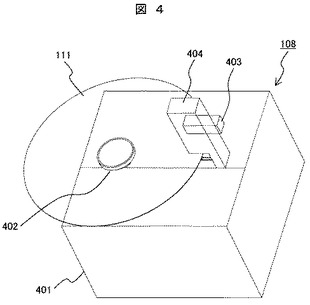
図4は、本発明に係るアライナを示す概略斜視図である。
【0042】
アライナ108は、アライナ本体401と、例えば静電チャック、真空チャック等を利用したウェーハ把持部402と、遮光検出センサ403と、遮光量検出センサ404とを含む。アライナ108は、搬送ロボット部107がウェーハ把持部402にウェーハ111を載せた後、遮光検出センサ403でウェーハ111の有無を確認し、ウェーハ111があることを確認した後、ウェーハ111を把持し、ウェーハ把持部402を回転させる。回転するウェーハ111のエッジを遮光量検出センサ404で監視し、ウェーハ111のエッジの切欠を検出し、切欠の方向が予め定めた方向となるようにウェーハ111を回転させて停止する。遮光検出センサ403は、ウェーハ検出用センサと呼んでもよい。
【0043】
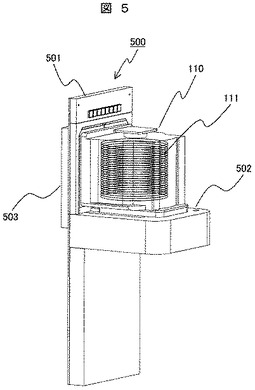
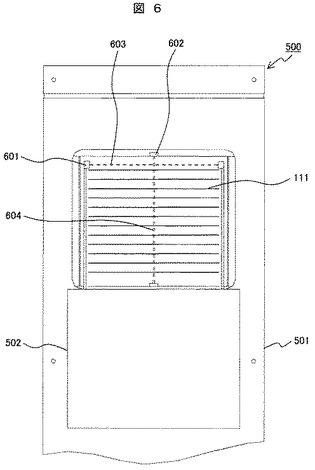
図5は、本発明に係るロードポート部を示す概略斜視図であり、図6は、本発明に係るロードポート部を示す概略背面図である。
【0044】
ロードポート部500は、図1のロードポート部103、104、105に相当するものであり、ロードポート本体501と、FOUP搭載部502と、FOUP蓋開閉部503と、水平方向遮光検出センサ601と、垂直方向遮光検出センサ602とを含む。ロードポート部500は、供給されたFOUP110の蓋を開き、搬送ロボット部107がFOUP110の内部のウェーハ111にアクセスできるようにしている。また、水平方向遮光検出センサ601でFOUP110の内部にあるウェーハ111の枚数や格納位置を検出し、その情報を半導体ウェーハ搬送装置に送信する。FOUP110の内部からウェーハ111が飛び出していた場合は、垂直方向遮光検出センサ602によって検出し、ウェーハ111が異常であるとの情報を半導体ウェーハ搬送装置に送信する。垂直方向遮光検出センサ602は、ウェーハ飛び出しセンサと呼んでもよい。
【0045】
水平方向遮光検出センサ601及び垂直方向遮光検出センサ602の投光器から受光器に向かって発せられた光によって光軸603及び604が形成される。
【0046】
なお、水平方向遮光検出センサ601は、鉛直方向に移動可能としてFOUP110の内部に格納されているウェーハ111の数量及び格納位置を検出することができるようにしてもよい。この場合、水平方向遮光検出センサ601をウェーハマッピングセンサと呼んでもよい。ウェーハマッピングセンサは、上下動を行う過程においてウェーハ111が光軸603を遮る状態を検出することにより、ウェーハ111の数量及び格納位置を検出(計測)する。このウェーハマッピングセンサを用いてハンドの位置を計測してもよい。
【0047】
この場合も、計測したハンドの位置及び搬送ロボット部の駆動量を用いて、コントローラによってハンドの位置の補正を行うことができる。
【0048】
EFEMの稼働前において、搬送ロボット部107のティーチングを行い、搬送ロボット部107、アライナ及びロードポート部500の相対位置を求める。
【0049】
以下、その方法を説明する。
【0050】
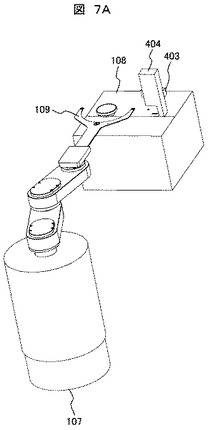
図7A、7B及び7Cは、アライナのセンサを使用してハンドの位置を検出する態様を示したものである。
【0051】
まず、ハンド109が遮光検出センサ403の光軸701と干渉し、遮光を検出するまでハンド109をアライナ108に接近させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまでに至る搬送ロボット部107の水平駆動制御量から、搬送ロボット部107とアライナ108との水平方向の相対位置を算出する。ここで、光軸701は、遮光検出センサ403の投光器から受光器に向かって発せられた光によって形成される。
【0052】
図8は、ロードポート部のセンサを使用してハンド位置を検出する構成を示したものである。
【0053】
垂直方向遮光検出センサ602が遮光を検出するまでハンド109を進入させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまで搬送ロボット部の水平駆動制御量から、ハンド109(搬送ロボット部)とFOUP蓋開閉部503(ロードポート部)との水平方向の相対位置を算出することができる。
【0054】
さらに、水平方向遮光検出センサ601と搬送ロボット部とのハンド109を測定位置へ動かし、ハンド109が遮光するまで本体を上昇、もしくは下降させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまでの搬送ロボット部の上昇駆動制御量から搬送ロボット部とロードポート部との垂直方向の相対位置を算出することができる。
【0055】
以上の手法により、搬送ロボット部、アライナ及びロードポート部の相対位置が求まり、この相対位置のデータを利用し、ウェーハ搬送シーケンスにおける搬送ロボット部の駆動量(制御量)を求めることができる。
【0056】
以下、EFEMが稼働した後における搬送ロボット部の自己診断について説明する。
【0057】
搬送ロボット部の自己診断は、半導体ウェーハ搬送装置の待機時間や、予め自己診断として定めておいた時間に、上記の相対位置の算出と同様の方法により、アライナ及びロードポート部のセンサを使用し、ハンドの位置を検出する。この場合に、前回に行った自己診断における搬送ロボット部とロードポート部及びアライナとの相対位置を求めた際の搬送ロボット部の駆動量と、今回の自己診断における搬送ロボット部の駆動量とを比較する。
【0058】
駆動量に差が生じた場合、その差を元に搬送シーケンスにおける搬送ロボット部の駆動制御量を修正し、搬送精度に生じる誤差を防ぐことが可能となる。また、駆動量の差に関して予め閾値を設けておき、閾値以上の変化が生じた場合に演算装置に異常であるいう情報を送信することにより、搬送ロボット部の異常を検出することができる。
【0059】
図9Aは、本発明による実施例のハンドを示す上面図であり、図9Bは、本発明による実施例のハンドを示す側面図である。
【0060】
ハンド109の一部に、図7Bに示す遮光検出センサ403並びに図8に示す水平方向遮光検出センサ601及び垂直方向遮光検出センサ602の光軸を通過させるための貫通穴901、902、903を設け、貫通穴901、902、903の中心位置でハンド109を停止し、ハンド109の位置の検出を行ってもよい。
【0061】
これにより、位置検出の精度を向上させることができる。
【0062】
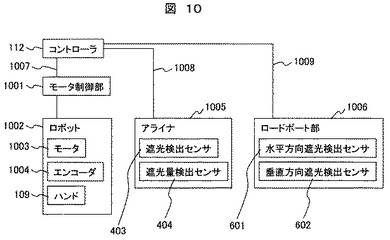
図10は、本発明による実施例のミニエン試料搬送システムのセンサ及び制御部等を示す構成図である。
【0063】
本図において、ロボット1002は、モータ1003及びエンコーダ1004を内蔵し、モータ制御部1001によりハンド109の動作を制御している。モータ1003は、ロボット1002の駆動源であり、エンコーダ1004は、モータ1003の回転位置の検出を行う。
【0064】
アライナ1005には、遮光検出センサ403及び遮光量検出センサ404が設置してある。また、ロードポート部1006には、水平方向遮光検出センサ601及び垂直方向遮光検出センサ602が設置してある。
【0065】
モータ制御部1001、アライナ1005及びロードポート部1006は、信号線1007、1008、1009を介してコントローラ112に接続されている。コントローラ112は、エンコーダ1004、遮光検出センサ403、遮光量検出センサ404、水平方向遮光検出センサ601及び垂直方向遮光検出センサ602からの情報を基にして、ハンド109の自己診断及び自動補正を行う。
【0066】
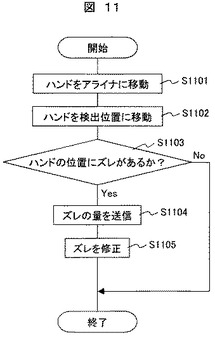
図11は、本発明による実施例のアライナにおいてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【0067】
本図においては、まず、ハンドをアライナに移動し(S1101)、ハンドを検出位置に移動する(S1102)。そして、ハンドの位置にズレ(差)があるかを、エンコーダ、遮光検出センサ及び遮光量検出センサからの情報を基にして判別する(S1103)。
【0068】
ズレがある場合(ズレが閾値以上である場合)は、ズレの量をコントローラからモータ制御部に送信し(S1104)、ズレを修正(補正)する(S1105)。ここで、ズレの量を補正値と定義する。
【0069】
ズレがない場合(ズレが閾値未満である場合)は、ハンドの自己診断及び自動補正を終了する。
【0070】
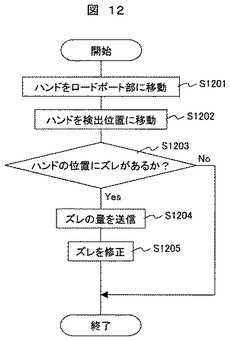
図12は、本発明による実施例のロードポート部においてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【0071】
本図においては、まず、ハンドをロードポート部に移動し(S1201)、ハンドを検出位置に移動する(S1202)。そして、ハンドの位置にズレがあるかを、エンコーダ、水平方向遮光検出センサ及び垂直方向遮光検出センサからの情報を基にして、判別する(S1203)。
【0072】
ズレがある場合(ズレが閾値以上である場合)は、ズレの量をコントローラからモータ制御部に送信し(S1204)、ズレを修正(補正)する(S1205)。
【0073】
ズレがない場合(ズレが閾値未満である場合)は、ハンドの自己診断及び自動補正を終了する。
【0074】
図11及び12において、ズレの量(補正値)が大きく、異常な値(異常値と呼ぶ。)を越えていた場合、コントローラは、異常と判断して半導体ウェーハ搬送装置を停止し、作業者によるメンテナンスを行うように信号(音(ブザーなど)、光(ランプの点灯、点滅など)など)を発する。
【符号の説明】
【0075】
101:ミニエン筐体、102:FFU部、103、104、105:ロードポート部、106:半導体製造装置、107:搬送ロボット部、108:アライナ、109:ハンド、110:FOUP、111:ウェーハ、112:コントローラ、301:ロボット本体、302:アーム、303:ハンド、401:アライナ本体、402:ウェーハ把持部、403:遮光検出センサ、404:遮光量検出センサ、501:ロードポート本体、502:FOUP搭載部、503:FOUP蓋開閉部、601:水平方向遮光検出センサ、602:垂直方向遮光検出センサ、701:光軸、901、902、903:貫通穴。
【技術分野】
【0001】
本発明は、半導体ウェーハ搬送装置及びこれを用いた搬送方法に関する。
【背景技術】
【0002】
半導体ウェーハ搬送装置において、ウェーハの高精度搬送を保証するため、ロボットの搬送位置の自動補正、搬送ルートからのズレを検出する自己診断等の手段がある。これら手段には、従来、主に下記の三つの手法が提案されている。
【0003】
(1)ハンド先端にセンサを備え、自動教示用ターゲットを検出して位置を補正する。
【0004】
(2)センサを備えた自動教示用擬似ウェーハをターゲットに搬送して位置を補正する。
【0005】
(3)光センサを備えた装置でハンド位置を検出し、位置ズレから異常を判断する。
【0006】
上記(1)〜(3)は、それぞれ、特許文献1〜3に記載されている。
【0007】
特許文献1には、ウェーハの処理を行う半導体製造装置と前記半導体製造装置にウェーハを供給し、処理されたウェーハを回収するウェーハ収納カセット部との間に、ウェーハの搬送室を形成するミニエン筐体を設け、このミニエン筐体内にウェーハハンドリング機構を備えたウェーハ搬送ロボットを配置し、ウェーハ搬送ロボットのハンド部に設けた検出器と、ミニエン筐体内に設置された基準スリット(自動教示用ターゲット)を検出し、基準スリットの位置に基づいてウェーハ搬送ロボットの移動方向を制御するウェーハ搬送装置が開示されている。
【0008】
特許文献2には、搬送アームを介して基板を載置台の上方に搬送し、載置台を貫通する昇降可能な複数の支持ピン上に基板を載せ、搬送アームを載置台外に戻す一方、支持ピンを下降させて載置台上に基板を載置する基板搬送装置において、基板と同程度の大きさの円板(自動教示用擬似円板)を治具として用意して搬送アームの後退許可位置を求める技術が開示されている。この技術では、上記円板には中央部に形成した透孔を通して下方を視認可能にカメラを搭載すると共に、上記複数の支持ピンを緩く挿通させるよう上記円板に形成した複数の挿通孔のうちの少なくとも一つに対し、支持ピンの有無を検出可能な検出手段を設け、搬送アームと支持ピンとを水平面内で相対移動させて、カメラで監視しながら円板の中心を既知の中心ターゲットに一致させ、搬送アームと支持ピンとを上下方向に相対移動させて、支持ピンの先端を検出手段で検出する。そして、支持ピン先端の検出位置から少なくとも搬送アームの厚み分を越える分だけ、相対的に搬送アームを円板に対し移動させた位置を演算により求め、搬送アームの後退許可位置とする。
【0009】
特許文献3には、チャンバへの処理部材の搬入出をアームロボットによって行う部材搬送システムにおいて、アームロボットのアームに設定したアーム基準点の位置を計測し、アーム基準点がチャンバ内に設定されたチャンバ基準点に一致した時点で得られるアーム基準点の座標位置を元にアームロボットの制御を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2009−16604号公報
【特許文献2】特開2003−218186号公報
【特許文献3】特開平11−254359号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
上記の従来技術において、搬送装置の自己診断及び自動補正は、装置の導入時、及び、装置の可動を止めるメンテナンス時に自動教示用の装置を利用して行っていた。また、その際、ロボットの動作精度確認は、専用の治具や専用のセンサを使用して行う必要があった。
【0012】
本発明は、半導体ウェーハ搬送装置の自己診断及び自動補正において、停止時間を短縮し、メンテナンスを簡略化し、半導体ウェーハ搬送装置の原価を低減することを目的とする。
【課題を解決するための手段】
【0013】
本発明の半導体ウェーハ搬送装置は、ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有することを特徴とする。
【発明の効果】
【0014】
本発明によれば、半導体ウェーハ搬送装置の搬送ロボット部に設置されたハンドの位置検出に、ロードポート部およびアライナが持つセンサを使用することができ、自己診断及び自動補正のために特別な装置(専用の治具等)を設置する必要がなくなり、装置の原価を低減することができる。
【0015】
また、本発明によれば、半導体ウェーハ搬送装置単体で自己診断及び自動補正を行うため、半導体ウェーハ搬送装置の待機時間中に自己診断及び自動補正を行い、メンテナンス時間を短縮することも可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る半導体ウェーハ搬送装置を示す平面図である。
【図2】本発明に係る半導体ウェーハ搬送装置を示す側面図である。
【図3】本発明に係る搬送ロボット部を示す概略側面図である。
【図4】本発明に係るアライナを示す概略斜視図である。
【図5】本発明に係るロードポート部を示す概略斜視図である。
【図6】本発明に係るロードポート部を示す概略背面図である。
【図7A】本発明に係るアライナによるハンドの位置検出動作を示す斜視図である。
【図7B】本発明に係るアライナ及び遮光検出センサを示す側面図である。
【図7C】本発明に係るアライナ及び遮光検出センサによるハンドの位置検出動作を示す側面図である。
【図8】本発明に係るロードポート部によるハンドの位置検出動作を示す断面図である。
【図9A】本発明による実施例のハンドを示す上面図である。
【図9B】本発明による実施例のハンドを示す側面図である。
【図10】本発明による実施例のミニエン試料搬送システムのセンサ及び制御部等を示す構成図である。
【図11】本発明による実施例のアライナにおいてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【図12】本発明による実施例のロードポート部においてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態である半導体ウェーハ搬送装置及びこれを用いた搬送方法について説明する。
【0018】
本実施形態は、基本的に次のように構成する。
【0019】
前記半導体ウェーハ搬送装置は、ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含み、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有する。そして、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有する。また、前記コントローラは、前記ハンドの計測位置に基づいて、前記搬送ロボット部の所定の位置から前記ロードポート部又は前記アライナに至るまでの駆動制御量を演算し、この演算値に基づいて前記ロードポート部又は前記アライナに対する前記ハンドの相対位置を算出し、この算出値に基づいて前記ハンドの位置の補正を行う。
【0020】
前記半導体ウェーハ搬送装置において、前記センサは、前記アライナにおける前記ウェーハの有無を検出するためのウェーハ検出用センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記ウェーハ検出用センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記アライナに対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0021】
前記半導体ウェーハ搬送装置において、前記センサは、前記ロードポート部の水平方向遮光検出センサ及び垂直方向遮光検出センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記水平方向遮光検出センサ及び前記垂直方向遮光検出センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0022】
前記半導体ウェーハ搬送装置において、前記垂直方向遮光検出センサは、ウェーハ飛び出しセンサであり、前記コントローラは、前記ウェーハ飛び出しセンサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行う。
【0023】
前記半導体ウェーハ搬送装置は、前記補正を前記ウェーハの搬送を行わない待機時間中に行う。
【0024】
前記半導体ウェーハ搬送装置において、前記コントローラは、前記センサを用いて計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置と、前記エンコーダを用いて検出した前記モータの駆動量から計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置との差が、異常値を越えた場合に異常と判断する。
【0025】
前記半導体ウェーハ搬送装置において、前記ハンドは、アライナ又はロードポート部の前記センサの投光器から受光器に向かって発せられた光を通過させるための貫通穴を有する。
【0026】
前記半導体ウェーハ搬送装置を用いた搬送方法は、前記半導体ウェーハ搬送装置を用いて、前記補正を行い、搬送ルートを決定して前記ウェーハを搬送する。
【0027】
以下、図を用いて本発明の実施例を説明する。
【実施例1】
【0028】
半導体製造装置へウェーハを供給し、また、排出する半導体ウェーハ搬送装置において、主な搬送は、FOUP(Front Opening Unified Pod)からウェーハを取出し、半導体製造装置に供給し、半導体製造装置から排出されたウェーハを取出し、FOUPに収納するものである。このような半導体ウェーハ搬送装置をミニエン試料搬送システムと称する。なお、FOUPは、ウェーハ収納容器と呼んでもよい。
【0029】
図1は、本発明に係るミニエン試料搬送システムを示す平面図である。
【0030】
図2は、本発明に係るミニエン試料搬送システムを示す側面図である。
【0031】
ミニエン試料搬送システム(以下、EFEM(Equipment Front End Module)と称する。)は、ミニエン筐体101、FFU部102(Fan Filter Unit)、ロードポート部103、104、105、搬送ロボット部107、アライナ108及びコントローラ112を含む。半導体製造装置106(半導体検査装置ともいう。)は、EFEMの上位装置である。
【0032】
ミニエン筐体101は、FFU部102、搬送ロボット部107、アライナ108及びコントローラ112を含む。そして、ミニエン筐体101は、システム外部を固定板(外装カバー)で覆い、外部と隔離した空間を提供する。また、ミニエン筐体101は、ロードポート部103、104、105から半導体製造装置106にウェーハを供給する接続部の機能も有する。
【0033】
FFU部102は、送風ファンとフィルターとを含み、ミニエン筐体101の上部に設置され、クリーンエアをダウンフローすることによりミニエン筐体101内にクリーン環境を実現する。
【0034】
ロードポート部103、104、105は、FOUP固定台とFOUP蓋開閉機構とを含む。そして、ロードポート部103、104、105は、ミニエン筐体101に接続され、半導体製造装置106及びミニエン筐体101の試料搬送口の役割を担う。
【0035】
搬送ロボット部107は、ウェーハを把持するためのハンド109を含み、水平方向への移動(水平移動)、上下方向への移動(上下移動)及び旋回動作を行うことができるようになっている。そして、搬送ロボット部107は、ロードポート部103、104、105と半導体製造装置106との間でウェーハの搬送を行う。
【0036】
コントローラ112は、半導体製造装置106(上位装置)との通信、各機構の制御を行い、ミニエン搬送システムのコントロールを行う。
【0037】
以下、本発明の実施例であるEFEMを用いたウェーハ搬送シーケンスの概略を示す。
【0038】
図1において、搬送ロボット部107は、ロードポート部103、104、105に設置されたFOUP110からアーム302及びハンド109を介してウェーハ111を取出し、必要に応じて水平移動(X方向移動)、及び上昇動作を行ってアライナ108に搬送する。ウェーハ111は、アライナ108で方向決めされた後、再度搬送ロボット107のハンドリングにより半導体製造装置106の接続部(図示省略)に搬送される。また、搬送ロボット部107は、半導体製造装置106で所定の処理を施したウェーハ111を接続部から回収し、ロードポート部103、104、105に設置されたFOUP110に搬送し、収納する。
【0039】
図3は、本発明に係る搬送ロボット部を示す概略側面図である。
【0040】
搬送ロボット部107は、本体301と、ロボット本体301の上部のアーム302と、アーム302の先端に設置したハンド109とを含む。搬送ロボット部107は、ハンド203でウェーハを把持し、ロボット本体301の昇降動作、水平移動及び旋回動作、並びにアーム202の水平伸縮によりウェーハを搬送する。これらの動作はすべて、モータの回転を伝達することによって行われる。モータの回転位置は、エンコーダを用いて検出することができる。
【0041】
図4は、本発明に係るアライナを示す概略斜視図である。
【0042】
アライナ108は、アライナ本体401と、例えば静電チャック、真空チャック等を利用したウェーハ把持部402と、遮光検出センサ403と、遮光量検出センサ404とを含む。アライナ108は、搬送ロボット部107がウェーハ把持部402にウェーハ111を載せた後、遮光検出センサ403でウェーハ111の有無を確認し、ウェーハ111があることを確認した後、ウェーハ111を把持し、ウェーハ把持部402を回転させる。回転するウェーハ111のエッジを遮光量検出センサ404で監視し、ウェーハ111のエッジの切欠を検出し、切欠の方向が予め定めた方向となるようにウェーハ111を回転させて停止する。遮光検出センサ403は、ウェーハ検出用センサと呼んでもよい。
【0043】
図5は、本発明に係るロードポート部を示す概略斜視図であり、図6は、本発明に係るロードポート部を示す概略背面図である。
【0044】
ロードポート部500は、図1のロードポート部103、104、105に相当するものであり、ロードポート本体501と、FOUP搭載部502と、FOUP蓋開閉部503と、水平方向遮光検出センサ601と、垂直方向遮光検出センサ602とを含む。ロードポート部500は、供給されたFOUP110の蓋を開き、搬送ロボット部107がFOUP110の内部のウェーハ111にアクセスできるようにしている。また、水平方向遮光検出センサ601でFOUP110の内部にあるウェーハ111の枚数や格納位置を検出し、その情報を半導体ウェーハ搬送装置に送信する。FOUP110の内部からウェーハ111が飛び出していた場合は、垂直方向遮光検出センサ602によって検出し、ウェーハ111が異常であるとの情報を半導体ウェーハ搬送装置に送信する。垂直方向遮光検出センサ602は、ウェーハ飛び出しセンサと呼んでもよい。
【0045】
水平方向遮光検出センサ601及び垂直方向遮光検出センサ602の投光器から受光器に向かって発せられた光によって光軸603及び604が形成される。
【0046】
なお、水平方向遮光検出センサ601は、鉛直方向に移動可能としてFOUP110の内部に格納されているウェーハ111の数量及び格納位置を検出することができるようにしてもよい。この場合、水平方向遮光検出センサ601をウェーハマッピングセンサと呼んでもよい。ウェーハマッピングセンサは、上下動を行う過程においてウェーハ111が光軸603を遮る状態を検出することにより、ウェーハ111の数量及び格納位置を検出(計測)する。このウェーハマッピングセンサを用いてハンドの位置を計測してもよい。
【0047】
この場合も、計測したハンドの位置及び搬送ロボット部の駆動量を用いて、コントローラによってハンドの位置の補正を行うことができる。
【0048】
EFEMの稼働前において、搬送ロボット部107のティーチングを行い、搬送ロボット部107、アライナ及びロードポート部500の相対位置を求める。
【0049】
以下、その方法を説明する。
【0050】
図7A、7B及び7Cは、アライナのセンサを使用してハンドの位置を検出する態様を示したものである。
【0051】
まず、ハンド109が遮光検出センサ403の光軸701と干渉し、遮光を検出するまでハンド109をアライナ108に接近させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまでに至る搬送ロボット部107の水平駆動制御量から、搬送ロボット部107とアライナ108との水平方向の相対位置を算出する。ここで、光軸701は、遮光検出センサ403の投光器から受光器に向かって発せられた光によって形成される。
【0052】
図8は、ロードポート部のセンサを使用してハンド位置を検出する構成を示したものである。
【0053】
垂直方向遮光検出センサ602が遮光を検出するまでハンド109を進入させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまで搬送ロボット部の水平駆動制御量から、ハンド109(搬送ロボット部)とFOUP蓋開閉部503(ロードポート部)との水平方向の相対位置を算出することができる。
【0054】
さらに、水平方向遮光検出センサ601と搬送ロボット部とのハンド109を測定位置へ動かし、ハンド109が遮光するまで本体を上昇、もしくは下降させ、遮光した時点で停止させる。停止した状態で、ハンド109が遮光するまでの搬送ロボット部の上昇駆動制御量から搬送ロボット部とロードポート部との垂直方向の相対位置を算出することができる。
【0055】
以上の手法により、搬送ロボット部、アライナ及びロードポート部の相対位置が求まり、この相対位置のデータを利用し、ウェーハ搬送シーケンスにおける搬送ロボット部の駆動量(制御量)を求めることができる。
【0056】
以下、EFEMが稼働した後における搬送ロボット部の自己診断について説明する。
【0057】
搬送ロボット部の自己診断は、半導体ウェーハ搬送装置の待機時間や、予め自己診断として定めておいた時間に、上記の相対位置の算出と同様の方法により、アライナ及びロードポート部のセンサを使用し、ハンドの位置を検出する。この場合に、前回に行った自己診断における搬送ロボット部とロードポート部及びアライナとの相対位置を求めた際の搬送ロボット部の駆動量と、今回の自己診断における搬送ロボット部の駆動量とを比較する。
【0058】
駆動量に差が生じた場合、その差を元に搬送シーケンスにおける搬送ロボット部の駆動制御量を修正し、搬送精度に生じる誤差を防ぐことが可能となる。また、駆動量の差に関して予め閾値を設けておき、閾値以上の変化が生じた場合に演算装置に異常であるいう情報を送信することにより、搬送ロボット部の異常を検出することができる。
【0059】
図9Aは、本発明による実施例のハンドを示す上面図であり、図9Bは、本発明による実施例のハンドを示す側面図である。
【0060】
ハンド109の一部に、図7Bに示す遮光検出センサ403並びに図8に示す水平方向遮光検出センサ601及び垂直方向遮光検出センサ602の光軸を通過させるための貫通穴901、902、903を設け、貫通穴901、902、903の中心位置でハンド109を停止し、ハンド109の位置の検出を行ってもよい。
【0061】
これにより、位置検出の精度を向上させることができる。
【0062】
図10は、本発明による実施例のミニエン試料搬送システムのセンサ及び制御部等を示す構成図である。
【0063】
本図において、ロボット1002は、モータ1003及びエンコーダ1004を内蔵し、モータ制御部1001によりハンド109の動作を制御している。モータ1003は、ロボット1002の駆動源であり、エンコーダ1004は、モータ1003の回転位置の検出を行う。
【0064】
アライナ1005には、遮光検出センサ403及び遮光量検出センサ404が設置してある。また、ロードポート部1006には、水平方向遮光検出センサ601及び垂直方向遮光検出センサ602が設置してある。
【0065】
モータ制御部1001、アライナ1005及びロードポート部1006は、信号線1007、1008、1009を介してコントローラ112に接続されている。コントローラ112は、エンコーダ1004、遮光検出センサ403、遮光量検出センサ404、水平方向遮光検出センサ601及び垂直方向遮光検出センサ602からの情報を基にして、ハンド109の自己診断及び自動補正を行う。
【0066】
図11は、本発明による実施例のアライナにおいてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【0067】
本図においては、まず、ハンドをアライナに移動し(S1101)、ハンドを検出位置に移動する(S1102)。そして、ハンドの位置にズレ(差)があるかを、エンコーダ、遮光検出センサ及び遮光量検出センサからの情報を基にして判別する(S1103)。
【0068】
ズレがある場合(ズレが閾値以上である場合)は、ズレの量をコントローラからモータ制御部に送信し(S1104)、ズレを修正(補正)する(S1105)。ここで、ズレの量を補正値と定義する。
【0069】
ズレがない場合(ズレが閾値未満である場合)は、ハンドの自己診断及び自動補正を終了する。
【0070】
図12は、本発明による実施例のロードポート部においてハンドの自己診断及び自動補正を行う場合の手順を示すフローチャートである。
【0071】
本図においては、まず、ハンドをロードポート部に移動し(S1201)、ハンドを検出位置に移動する(S1202)。そして、ハンドの位置にズレがあるかを、エンコーダ、水平方向遮光検出センサ及び垂直方向遮光検出センサからの情報を基にして、判別する(S1203)。
【0072】
ズレがある場合(ズレが閾値以上である場合)は、ズレの量をコントローラからモータ制御部に送信し(S1204)、ズレを修正(補正)する(S1205)。
【0073】
ズレがない場合(ズレが閾値未満である場合)は、ハンドの自己診断及び自動補正を終了する。
【0074】
図11及び12において、ズレの量(補正値)が大きく、異常な値(異常値と呼ぶ。)を越えていた場合、コントローラは、異常と判断して半導体ウェーハ搬送装置を停止し、作業者によるメンテナンスを行うように信号(音(ブザーなど)、光(ランプの点灯、点滅など)など)を発する。
【符号の説明】
【0075】
101:ミニエン筐体、102:FFU部、103、104、105:ロードポート部、106:半導体製造装置、107:搬送ロボット部、108:アライナ、109:ハンド、110:FOUP、111:ウェーハ、112:コントローラ、301:ロボット本体、302:アーム、303:ハンド、401:アライナ本体、402:ウェーハ把持部、403:遮光検出センサ、404:遮光量検出センサ、501:ロードポート本体、502:FOUP搭載部、503:FOUP蓋開閉部、601:水平方向遮光検出センサ、602:垂直方向遮光検出センサ、701:光軸、901、902、903:貫通穴。
【特許請求の範囲】
【請求項1】
ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有することを特徴とする半導体ウェーハ搬送装置。
【請求項2】
前記コントローラは、前記ハンドの計測位置に基づいて、前記搬送ロボット部の所定の位置から前記ロードポート部又は前記アライナに至るまでの駆動制御量を演算し、この演算値に基づいて前記ロードポート部又は前記アライナに対する前記ハンドの相対位置を算出し、この算出値に基づいて前記ハンドの位置の補正を行うことを特徴とする請求項1記載の半導体ウェーハ搬送装置。
【請求項3】
前記センサは、前記アライナにおける前記ウェーハの有無を検出するためのウェーハ検出用センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記ウェーハ検出用センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記アライナに対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項1又は2に記載の半導体ウェーハ搬送装置。
【請求項4】
前記センサは、前記ロードポート部の水平方向遮光検出センサ及び垂直方向遮光検出センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記水平方向遮光検出センサ及び前記垂直方向遮光検出センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項1〜3のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項5】
前記水平方向遮光検出センサは、鉛直方向に移動可能として前記ウェーハ収納容器の内部に格納されている前記ウェーハの数量及び格納位置を計測するためのウェーハマッピングセンサであり、このウェーハマッピングセンサを用いて前記ハンドの位置を計測し、前記コントローラが、前記ハンドの位置及び前記搬送ロボット部の駆動量を用いて前記ハンドの位置の補正を行うことを特徴とする請求項4記載の半導体ウェーハ搬送装置。
【請求項6】
前記垂直方向遮光検出センサは、ウェーハ飛び出しセンサであり、前記コントローラは、前記ウェーハ飛び出しセンサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項4記載の半導体ウェーハ搬送装置。
【請求項7】
前記補正を前記ウェーハの搬送を行わない待機時間中に行うことを特徴とする請求項1〜6のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項8】
前記コントローラは、前記センサを用いて計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置と、前記エンコーダを用いて検出した前記モータの駆動量から計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置との差が、異常値を越えた場合に異常と判断することを特徴とする請求項1〜7のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項9】
前記ハンドは、アライナ又はロードポート部の前記センサの投光器から受光器に向かって発せられた光を通過させるための貫通穴を有することを特徴とする請求項1〜8のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項10】
請求項1〜9のいずれか一項に記載の半導体ウェーハ搬送装置を用いて、前記補正を行い、搬送ルートを決定して前記ウェーハを搬送することを特徴とする搬送方法。
【請求項1】
ウェーハ収納容器を設置可能なロードポート部と、ウェーハを把持するハンドを有し、前記ウェーハを搬送する搬送ロボット部と、前記ウェーハの方向決めを行うアライナとを含む半導体ウェーハ搬送装置であって、前記ロードポート部及び前記アライナの少なくとも一つが前記ロードポート部又は前記アライナに備えられたセンサを有し、前記センサを用いて前記ロードポート部及び前記アライナの少なくとも一つに対する前記ハンドの位置を計測し、この計測値に基づいて前記ハンドの位置の補正を行うコントローラを有することを特徴とする半導体ウェーハ搬送装置。
【請求項2】
前記コントローラは、前記ハンドの計測位置に基づいて、前記搬送ロボット部の所定の位置から前記ロードポート部又は前記アライナに至るまでの駆動制御量を演算し、この演算値に基づいて前記ロードポート部又は前記アライナに対する前記ハンドの相対位置を算出し、この算出値に基づいて前記ハンドの位置の補正を行うことを特徴とする請求項1記載の半導体ウェーハ搬送装置。
【請求項3】
前記センサは、前記アライナにおける前記ウェーハの有無を検出するためのウェーハ検出用センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記ウェーハ検出用センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記アライナに対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項1又は2に記載の半導体ウェーハ搬送装置。
【請求項4】
前記センサは、前記ロードポート部の水平方向遮光検出センサ及び垂直方向遮光検出センサであり、前記搬送ロボット部は、前記ハンドを駆動するモータ及び前記モータの回転位置を検出するエンコーダを有し、前記コントローラは、前記水平方向遮光検出センサ及び前記垂直方向遮光検出センサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項1〜3のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項5】
前記水平方向遮光検出センサは、鉛直方向に移動可能として前記ウェーハ収納容器の内部に格納されている前記ウェーハの数量及び格納位置を計測するためのウェーハマッピングセンサであり、このウェーハマッピングセンサを用いて前記ハンドの位置を計測し、前記コントローラが、前記ハンドの位置及び前記搬送ロボット部の駆動量を用いて前記ハンドの位置の補正を行うことを特徴とする請求項4記載の半導体ウェーハ搬送装置。
【請求項6】
前記垂直方向遮光検出センサは、ウェーハ飛び出しセンサであり、前記コントローラは、前記ウェーハ飛び出しセンサを用いて前記ハンドの位置を計測し、前記エンコーダを用いて検出した前記モータの駆動量から、前記ロードポート部に対する前記ハンドの位置を計測し、前記ハンドの位置の補正を行うことを特徴とする請求項4記載の半導体ウェーハ搬送装置。
【請求項7】
前記補正を前記ウェーハの搬送を行わない待機時間中に行うことを特徴とする請求項1〜6のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項8】
前記コントローラは、前記センサを用いて計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置と、前記エンコーダを用いて検出した前記モータの駆動量から計測した前記アライナ又は前記ロードポート部に対する前記ハンドの位置との差が、異常値を越えた場合に異常と判断することを特徴とする請求項1〜7のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項9】
前記ハンドは、アライナ又はロードポート部の前記センサの投光器から受光器に向かって発せられた光を通過させるための貫通穴を有することを特徴とする請求項1〜8のいずれか一項に記載の半導体ウェーハ搬送装置。
【請求項10】
請求項1〜9のいずれか一項に記載の半導体ウェーハ搬送装置を用いて、前記補正を行い、搬送ルートを決定して前記ウェーハを搬送することを特徴とする搬送方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9A】
【図9B】

【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図8】
【図9A】
【図9B】
【図10】
【図11】
【図12】
【公開番号】特開2011−108958(P2011−108958A)
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願番号】特願2009−264474(P2009−264474)
【出願日】平成21年11月20日(2009.11.20)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
【公開日】平成23年6月2日(2011.6.2)
【国際特許分類】
【出願日】平成21年11月20日(2009.11.20)
【出願人】(000233549)株式会社日立ハイテクコントロールシステムズ (130)
【Fターム(参考)】
[ Back to top ]