
半導体パターン検査装置
【課題】虚報を多発させることなく,システマティック欠陥を検出する半導体パターン検査装置を提供する。
【解決手段】検査に先立ち,前準備として,少数の実画像101と対応する設計データ102から,特徴量算出部でそれぞれのパターンの特徴を表す特徴量を算出し(106a,106b),これと,欠陥座標が指定された教示データ103とから,正常と欠陥を識別するルールである識別境界を識別境界算出部で算出する(107)。検査時には,検査対象の実画像104と,設計データ105から106a,106bと同様にして特徴量を算出し(108a,108b),これらに対し,検査前準備にて算出した識別境界107を適用することにより,欠陥判定部で欠陥判定109を行う。
【解決手段】検査に先立ち,前準備として,少数の実画像101と対応する設計データ102から,特徴量算出部でそれぞれのパターンの特徴を表す特徴量を算出し(106a,106b),これと,欠陥座標が指定された教示データ103とから,正常と欠陥を識別するルールである識別境界を識別境界算出部で算出する(107)。検査時には,検査対象の実画像104と,設計データ105から106a,106bと同様にして特徴量を算出し(108a,108b),これらに対し,検査前準備にて算出した識別境界107を適用することにより,欠陥判定部で欠陥判定109を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,半導体パターンの検査装置に関する。
【背景技術】
【0002】
半導体回路パターンの微細化に伴い、光露光装置の解像度は限界に達し、設計通りのパターンをウェハ上に形成することが困難になりつつある。半導体ウェハ上に形成されたパターンは,線幅が設計値からずれたり,あるいは,パターン先端に縮退が生じたり,あるいは,パターンの付け根の形状変化といった不良が発生しやすくなる。こうした欠陥は,システマティック欠陥と呼ばれ,全ダイで共通に発生するため,ダイ・ツー・ダイ(die to die)比較と呼ばれる隣接するダイ間での比較を行う方式では検出することが難しい。
【0003】
一方,特開2011−17705号公報(特許文献1)には,隣接ダイと比較する代わりに,検査対象パターンを,設計データと比較する方法が開示されている。具体的には,検査対象パターンから輪郭線を抽出し,これと,線分もしくは曲線で表現された設計データとを比較して,両者の乖離の程度に応じ,乖離が大きければ欠陥と判定する。設計データとの比較なので、全ダイで共通に発生するシステマティック欠陥であっても,原理的には検出可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−17705号公報
【非特許文献】
【0005】
【非特許文献1】N.ダラル,B.トリッグス著(N. Dalal, and B. Triggs)、「ヒストグラム・オブオリエンテッド・グラディエンツ・フォー・ヒューマン・ディテクション(Histograms of Oriented Gradients for Human Detection)」,コンピュータ・ビジョン・アンド・パターン・レコグニション(Computer Vision and Pattern Recognition),IEEE,2005年、第一号、p. 886-893,(アメリカ)
【非特許文献2】栗田多喜夫,速水悟 (T.Kurita, and S.Hayamizu) 著,「ジェスチャー・レコグニション・ユージング・エイチラック・フューチャーズ・オブ・パーコール・イメージズ・アンド・エイチエムエム・ベースド・レコガナイザー(Gesture Recognition using HLAC Features of PARCOR Images and HMM based Recognizer)」,プロセス・オブ・インターナショナル・カンファレンス・オン・オートマティック・フェイス・アンド・ジェスチャー・レコグニション(Proc. of Inter. Conf. on Automatic Face and Gesture Recognition),IEEE,1998年,p.422-427,(アメリカ).
【非特許文献3】C.M.ビショップ(C. M. Bishop)著,「パターン認識と機械学習 上 ベイズ理論による統計的予測」 ,初版,シュプリンガー・ジャパン株式会社,2006年12月10日, p.185-190
【非特許文献4】C.M.ビショップ(C. M. Bishop)著,「パターン認識と機械学習 下 ベイズ理論による統計的予測」,初版,シュプリンガー・ジャパン株式会社,2008年7月1日, p. 35-55
【発明の概要】
【発明が解決しようとする課題】
【0006】
第1の課題として,ウェーハ上に転写されたパターン上には,欠陥とはいえない設計データとの形状の乖離(コーナの丸みの違いなど)が多く存在する。前記特許文献1は,検査対象パターンから抽出した輪郭線と,線分もしくは曲線で表現された設計データとの乖離が大きければ欠陥と判定する方式であるため,上記のような欠陥とはいえない形状の乖離と,システマティック欠陥との判別が難しい。この結果,システマティック欠陥を検出しようとすると,欠陥とはいえない形状の乖離部分も検出され,虚報が多発するという問題があった。
【0007】
本発明は,虚報を多発させることなく,システマティック欠陥を検出することを目的とする。
【0008】
また第2の課題として,検査の条件出しには,欠陥座標が既知のウェハを用いることが望ましいが,そういったウェハが必ずしも手に入るとはかぎらないという問題がある。本発明では,短時間で検査の条件出しを行うための,有効なデータ(欠陥部データと正常部データ,及び正常部データのみ)を効率よく得ることを目的とする。
【課題を解決するための手段】
【0009】
上記第1の課題を解決するため,検査対象パターンと設計データから生成した基準パターンのデータから欠陥を検出する検査装置であって,
検査対象パターンの各座標において1個以上の特徴量(特徴量群1)を算出する手段と,基準パターンの各座標において1個以上の特徴量(特徴量群2)を算出する手段と,同じ座標の上記特徴量群1と上記特徴量群2を組み合わせて特徴ベクトルを算出する手段と,予め記憶された,特徴量空間上で欠陥と正常を識別するための境界面(識別境界面)を読み出す手段と,該読み出した識別境界面と,上記特徴ベクトルとを比較→特徴ベクトルとを特徴空間上で欠陥と正常の空間に分けることにより欠陥を検出する手段を備えることを特徴とする。
【0010】
さらに,上記識別境界面を算出するため,検査対象パターン上の欠陥が存在する領域である欠陥位置座標を指示するためのユーザインターフェース手段と,該検査対象パターン上で,該欠陥位置座標上,および,欠陥が存在しない正常な領域である正常位置座標で,それぞれ,欠陥ラベルを付与した特徴量群1と正常ラベルを付与した特徴量群1を算出する手段と,該検査対象パターンに対応する基準パターン上で,該欠陥位置座標上,および,該正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群2と正常ラベル付きの特徴量群2を算出する手段と,
該欠陥ラベル付きの特徴量群1と該欠陥ラベル付きの特徴量群2とをそれぞれ対応する座標で組み合わせた欠陥部特徴ベクトルを算出する手段と該正常ラベル付きの特徴量群1と該正常ラベル付き特徴量群2とをそれぞれ対応する座標で組み合わせた正常部特徴ベクトルを算出する手段と,
特徴量空間上で,該欠陥部特徴ベクトルと該正常部特徴ベクトルが,統計的に,もっとも引きはされるような境界面として識別境界面を算出する手段と,該識別境界面を記憶する手段とをさらに備えることを特徴とする。
【0011】
上記第2の課題を解決するため,検査対象パターンと設計データから生成した基準パターンとの比較により欠陥を検出する検査装置であって,
検査対象の試料の設計データと過去検査したデータを利用して検査対象のウェハから新たにパターン画像を撮像する座標を算出する手段と,
前記撮像した画像データを利用して欠陥判定方法を新たに作成する手段を
備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば,予め,欠陥部と正常部を教示し,それに基づき,欠陥と正常を判別する識別境界面を求めるので,虚報を多発させることなく,システマティック欠陥を検出することができる。また,識別境界を作るための欠陥部データと正常部データ,及び正常部のみのデータを,事前に過去のデータと設計データの特徴量分布を解析することで,検査対象新しいウェハから撮像する場所を求め,効率よく取得することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の装置構成全体を示す図である。
【図2】本発明による欠陥判定方式のフローを示す図である。
【図3】特徴量を算出する時に使用するオペレータの例を示した図である。
【図4】電子線式パターン検査装置で撮像された画像の帯電の影響を示した図である。
【図5】過去のデータを利用して検査対象のウェハから事前に実パターンデータを取得するフローを示す図である。
【図6】過去の特徴ベクトルデータの分布の例を示した図である。
【図7】事前に取得した実パターンデータから識別境界を作成した例を示した図である。
【図8】事前に取得した実パターンデータから識別境界を作成した例を示した図である。
【図9】特徴空間上において正常と欠陥の二つの空間に分ける識別境界を示した概念図である。
【図10】特徴量を用いてif-thenルールで欠陥を判定する例を示した図である。
【図11】実パターン画像と設計データからGUIによる教示データの作成例を示した図である。
【図12】欠陥種別毎に教示を行う例とそのGUIを示した図である。
【図13】識別境界を求める手法であるLDAとSVMについて説明する図である。
【図14】図12によって得られる効果の例を示した図である。
【図15】正常部の特徴ベクトルから識別境界を作成する例を示した図である。
【図16】露光条件をダイ毎に変えたウェハを説明する図である。
【図17】取得した正常データを加工することで欠陥データを生成する例を示した図である。
【図18】過去の検査データを選択するGUIを示した図である。
【図19】取得した実パターンデータの確認と正常と欠陥の情報を入力するGUIを示した図である。
【図20】検査時に識別境界により欠陥判定を行う例を示した図である。
【図21】欠陥判定された画素から後処理で欠陥判定を行う例を示した図である。
【図22】欠陥判定の結果を表示するGUIの例を示した図である。
【図23】正常と欠陥を識別する際の感度調整を行う例とそのGUIを示した図である。
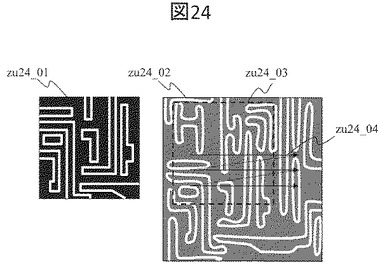
【図24】実パターンデータと設計データの位置合わせの例を説明する図である。
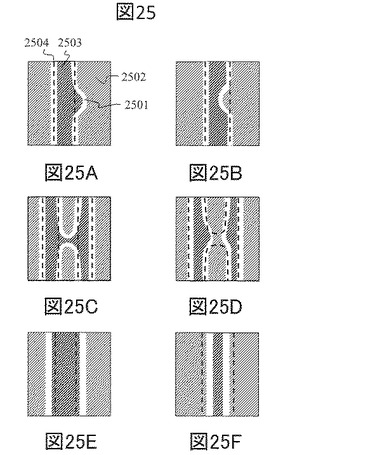
【図25】様々な欠陥の種類を示した例である。
【発明を実施するための形態】
【実施例1】
【0014】
(1)全体構成
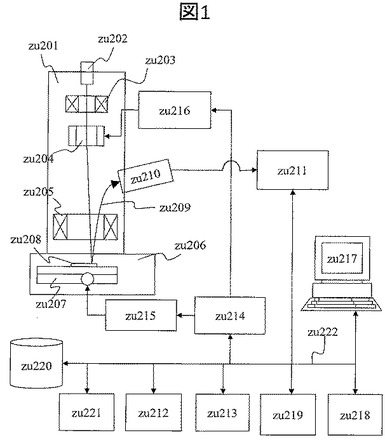
図1に本発明に係るパターン検査装置の全体構成を示す。本実施の形態では,検査対象のウェハ画像を走査電子顕微鏡(SEM:Scanning Electron-beam Microscope)によって取得する。電子光学系zu201は,電子線を発生させる電子線源zu202と電子線を収束させるコンデンサレンズzu203,電子線をXY方向に偏向する偏向器zu204と,電子線を対象基板上に収束させる対物レンズzu205からなる。ウェハzu208を真空で保存する試料室zu206には,試料を設置するXYステージzu207を備える。電子線光源を照射することで試料から発生した2次電子zu209は検出器zu210で感知され,検出信号がA/D変換機zu211に送られデジタル画像に変換される。画像はバスzu222を通して記憶装置zu220に送られ、記憶する。バスzu222には特徴分布算出部zu212,特徴量算出部zu213,撮像座標算出部zu214,識別境界算出部zu218,欠陥判定部zu219,位置合わせ算出部zu221が接続されデータ処理が行われる。撮像座標算出部zu214によって算出した座標は偏向制御部zu216とステージコントローラzu215に送られ,実パターンデータの画像が撮像される。ユーザによる撮像した画像のチェックや操作の入力は表示部・GUIzu217によって行う。
【0015】
(2)前処理
欠陥検出などのデータ処理を行う前に,図1の位置合わせ算出部zu221において,撮像した実パターンデータと設計データの位置合わせを行う。
位置合わせの処理の例を図24に示す。zu24_01は画像化した設計データの一部で,撮像して取得した実パターン画像zu24_02の中心座標付近から得られたものである。zu24_01と同サイズの実パターン画像上の領域zu24_03において,zu24_01との正規化相互相関を計算し値を求める。この値をzu24_04の矢印で示したパス上にスキャンしながら計算し,最も値が大きくなる位置を求めることで,実パターン画像zu24_02上の設計データzu24_01の位置が特定できる。位置を求めたあとは,zu24_02の領域だけ画像化した設計データを取得する。
【0016】
(3)欠陥検出のフロー
図1の位置合わせ算出部zu221にて前記前処理で取得した位置合わせ済みの設計データと実パターン画像に対して,図2に示すフローで欠陥検出を行う。本発明では,検査に先立ち,前準備として,少数の実画像101と対応する設計データ102から,特徴量算出部zu212でそれぞれのパターンの特徴を表す特徴量を算出し(106a,106b),これと,欠陥座標が指定された教示データ103とから,正常と欠陥を識別するルールである識別境界を識別境界算出部zu219で算出する(107)。検査時には,検査対象の実画像104と,設計データ105から106a,106bと同様にして特徴量を算出し(108a,108b),これらに対し,検査前準備にて算出した識別境界107を適用することにより,欠陥判定部zu219で欠陥判定109を行う。
【0017】
以下,各処理内容(特徴量算出,識別境界の算出,欠陥判定,判定結果表示)について詳述する。
【0018】
(4)特徴量の算出
本発明では,上述のように,実画像および,設計データからそれぞれのパターンの特徴を表す特徴量を算出し,これらに対して,正常と欠陥を識別するルールを適用することで欠陥判定を行う。ここでは,特徴量の算出方法について述べる。
【0019】
始めに,実画像から算出する特徴量(図2の106a,108aに相当)について述べる。
【0020】
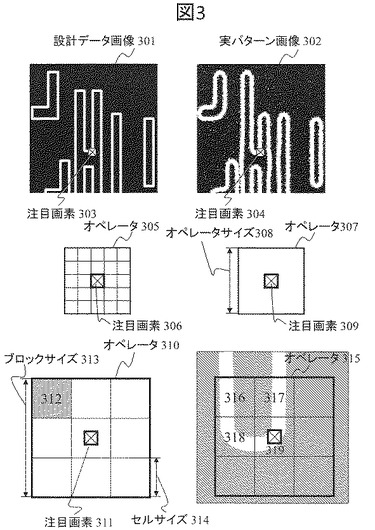
特徴量の算出は画素ごとに行う。図3の実パターン画像302において注目画素304の特徴量算出することを考える。注目画素の周辺画素における輝度値を組み合わせることで算出を行う。最終的によい識別境界を得るには,なるべく注目画素周辺のパターン形状の情報をよく表現するような特徴量であり,かつ特徴量の次元数が小さくなることが望ましい。
【0021】
もっとも単純な特徴量はオペレータ305のように注目画素の周辺画素におけるそれぞれの輝度値をそのまま特徴量にすることである。これは,オペレータサイズ分だけ実パターン形状の完全な情報をもっていることになるが,オペレータのサイズを大きくしていくと爆発的に特徴量の次元が増え,形状的な情報としては冗長すぎる。そこでオペレータ307のようなオペレータサイズだけの領域に対して様々な統計量を算出し,特徴量にするほうがよい。実パターン画像から求められる統計的な特徴量としては,
(a) オペレータ内の輝度の平均値
(b) モーメント特徴量
(c) HOG(Histograms of Oriented Gradients)特徴量(非特許文献1参照)
(d) 高次局所自己相関特徴量(非特許文献2参照)
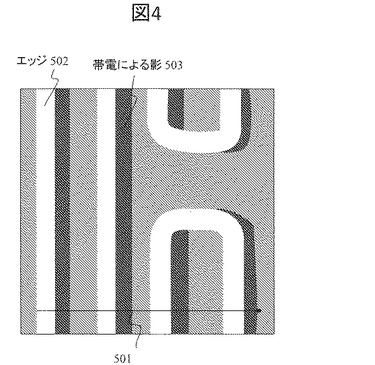
などが有効である。さらにオペレータ310のように,注目画素の近傍において局所的な領域であるセル312の領域をとり,このセル毎に統計的な特徴量をとることで,注目画素回りの広い範囲の形状情報を特徴量として算出することができる。オペレータ315の例では,セルのHOG特徴量を算出することでセル316とセル317において垂直方向のエッジ成分が,セル318とセル319において斜め方向のエッジ成分が抽出され,注目画素はラインの角であることが表現される。また図4はSEM画像における帯電の影響を示した図である。一般的にSEM像を得る時は,電子ビームを501方向にスキャンすることで得られる。そのため,エッジ502が存在する領域のスキャン方向側に帯電の影響による影503が生じる。このような特徴も,オペレータ310で輝度の平均値を算出するなどで表現することができる。
【0022】
次に,設計データから算出する特徴量(図2の106b,108bに相当)について述べる。
設計データ301からも,対応する注目画素304の特徴量を算出する。設計データからの特徴量は輪郭線画像を作成し実パターン画像と同じ特徴量を求めてもよい。また,以下のような設計データ専用の特徴量として
(i) 配線構造のベクトル成分
(ii) 配線上であるか否か
(iii) ラインの端点,連結点の関係
などを算出することも効果的である。(i)は,設計データの注目画素周辺の配線方向がどちらに伸びているかの度合いである。(ii)は注目画素がパターン配線の上であるかどうかの特徴量を表す。(iii)は配線構造をグラフ構造にした時,エッジの端点と連結点の場所を求め,注目画素周辺にそれがどのように分布しているかの特徴量を表す。
【0023】
(5)識別境界の算出
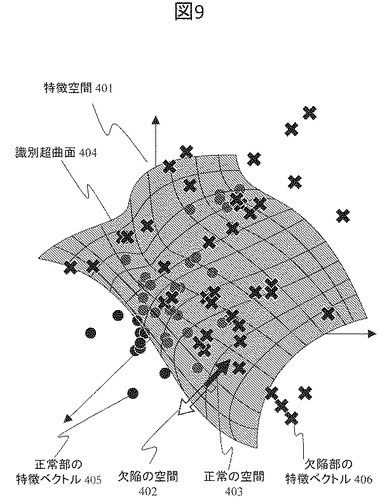
正常と欠陥を識別するルールである識別境界(図2の107)の算出方法について述べる。識別境界とは106で求めた各特徴量を軸とする特徴空間401(図9参照)において欠陥の空間402と正常の空間403に分けるような識別超曲面(2次元上における曲線)404のことである。
【0024】
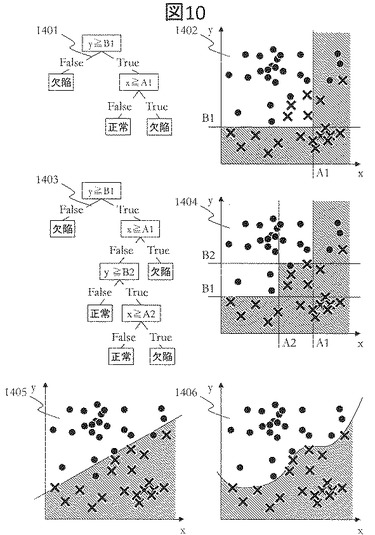
図5のフローにおいて欠陥データを取得することができた場合について述べる。正常と欠陥データの両方と用いて識別方法を生成する。正常と欠陥を識別するルールはそれぞれの特徴量に対して条件式を決めた図10の1401の例のようなif-thenルールがもっともシンプルである(xとyは特徴量を表す)。このルールを決定する時は解析的に求めても,しきい値であるA1とB1をユーザに入力してもらってもよい。特徴量空間上の欠陥判定領域を斜線部として1402に示す。黒丸点は正常部の画素から得られた特徴ベクトル,黒罰点は欠陥部の画素から得られた特徴ベクトルである。判定領域は特徴量の軸に垂直な辺を持つ矩形状の領域で定義される。1403のようにif-thenルールを増やすことで1404のように識別境界の精度を高めることが可能であるが,複雑な境界を矩形の組み合わせで表わすためルールが膨大に増え,ユーザによる調整が困難になる。真の識別境界がxとyで相関を持つ時などは,ax+byの線形和で表現される識別境界の1405や,非線形な関数で表わされる識別境界1406のほうがよりよい境界を求めることができる。これらの境界もユーザによるパラメータ調整で求めることは非常に困難であるが,既に正常か欠陥か既知である特徴ベクトルとする教示データから学習を行うことで,正常と欠陥の特徴ベクトルをもっともよく分けるような境界を求めることが可能である。また,教示データにユーザの意図が反映することができれば,識別境界も意図に沿って引くことが可能となる。
【0025】
始めに教示データ(図2の103)の作成方法について述べる。
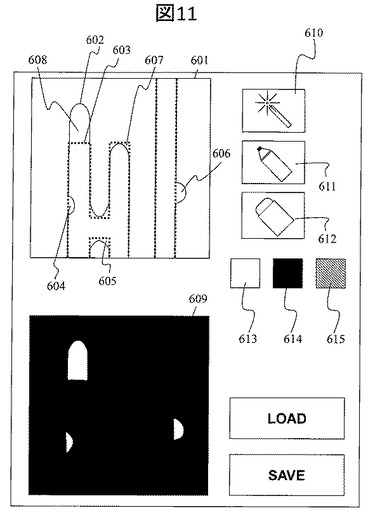
図11は教示データを作成するためのGUIの例を示す。画像601は既に位置合わせ済みの実パターンから抽出した輪郭線602(線)と設計データの輪郭線603(点線)である。2つの輪郭線において形状に相違する領域がある時,604,605,606,607,608のような2つの輪郭線で囲まれた領域が生じる。ユーザは610の領域選択ツールを選び,画面上に表示される画像601から欠陥にしたい領域中の一点をポインティングデバイスで指定することで,輪郭線に囲まれた領域を選択することができる。実パターンの輪郭線が消失している部分は,鉛筆ツール611を選択し領域が閉じるように修正することができる。また誤って抽出された輪郭線や鉛筆ツールで修正をまちがえた部分は消しゴムツール612で消去することができる。
【0026】
613,614,615はカラー選択ボタンで白613を選択すると欠陥部を指定するモードに,黒614を選択すると正常部を指定するモードに,灰色615を選択するとユーザが欠陥か正常かわからない部分を選択するモードになる。教示画像作成において基本的にクリックされなかった点に関してはすべて正常部と見なす。この画像の場合,604,606,608を欠陥領域と判断し,白い領域を欠陥部,黒い領域を正常部とした教示画像609が作成され,確認することができる。
【0027】
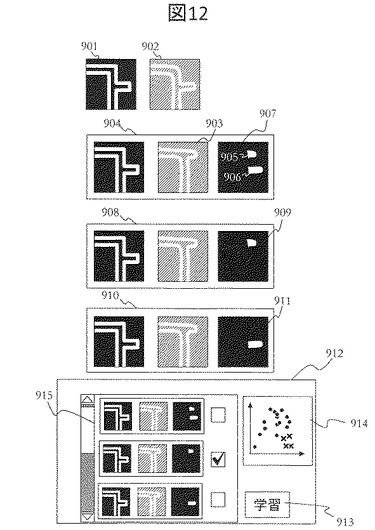
図12における902は設計データ901に対する正常な実パターン画像の例である。ここで実際に取得した実パターン画像として903が得られたとすると,欠陥領域は領域905,906となる欠陥画像907が得られ,識別境界を求める時に使う学教示データのセット904を作成することができる。ここで欠陥画像907の領域905を設計データに対して実パターンのラインが膨張している凸欠陥に,領域906を設計データに対して実パターンのラインが縮退している凹欠陥に種類を分けることができる。この凸欠陥だけの教示画像909を教示データセットにした凸欠陥教示データセット908と,凹欠陥だけの教示画像911を教示データセットにした凹欠陥教示データセット910を作成する。908と910のデータセットそれぞれの識別境界を求めることで,欠陥検出と欠陥分類を同時に行うことができる。後述するが,これにより判定精度を高める効果や,欠陥種毎にユーザが感度の調整を行うことができるというメリットがある。図25は様々な欠陥の種類を示した例である。図25Aを例に図を説明すると,白線2501は実パターンのラインエッジ,輝度の高いグレーの領域2502は実パターンの背景領域,輝度の低いグレー領域2503は実パターンのライン,点線2504は設計データのラインの輪郭線を表わす。今回目的とするようなシステマティック欠陥検出では,欠陥種類を図25Aの凸欠陥,図25Bの凹欠陥,2つのラインが一部で繋がってしまう図25Cのブリッジング,2つのラインの接続箇所が切れて分断してしまう図25Dのネッキング,図25Eのライン幅の膨張,図25Fのライン幅の縮退などでわけるとよい。
912はこれら欠陥種毎に識別平面を求めるときに使うGUIを表示したものである。
【0028】
915の部分で904,908,910などの欠陥種別毎に分けたデータセットを選択することができ,また914の部分において選択したデータセットの特徴空間上の分布や各特徴量に対するヒストグラムが表示されユーザは確認することができる。913のボタンを押すことで,選択したデータセットに対する識別境界を求めることができる。
【0029】
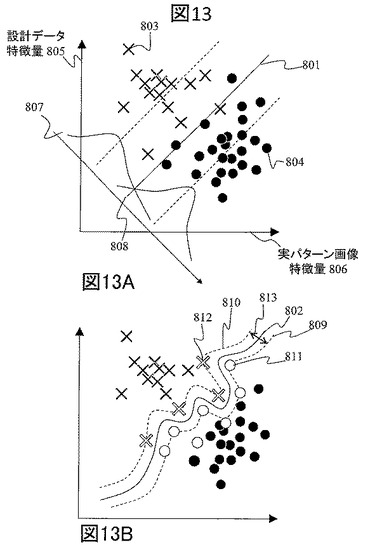
識別境界の算出方法としては,一般的なパターン認識手法である,線形判別手法(LDA:Linear discriminant analysis),サポートベクターマシン(以下SVM:Support vector machine)が適用可能である(非特許文献3,および非特許文献4参照)
図13AにLDAの原理を示す。わかりやすくするために,設計データの特徴量を805の1次元,実パターンデータの特徴量を806の1次元として扱う。図中の803のような罰点は欠陥の特徴ベクトルであり,804のような丸点は正常の特徴ベクトルである。801は線形判別分析(以下LDA)によって求められた識別境界である。図中801は直線で表現されるが,実際の特徴ベクトルは3次元以上を取るので直線は超平面になる。直線801を境界にデータを分けることは全特徴ベクトルを特徴量の線形和を求めることで軸807に射影し,しきい値808で判別している事と同じである。LDAでは,射影された正常部の特徴ベクトル集合の分散σT2と欠陥部の特徴ベクトルσN2、全特徴ベクトルの分散σA2とした時に表される分離度J=(σT2+σN2)/ σA2を最大にするような射影軸を求める。
【0030】
LDAの特徴として特徴ベクトル集合の統計量から特徴量の線形和によって表現される識別面および識別境界を求めている。そのため特徴ベクトルの数が多くても学習時間が短く,1個の特徴ベクトルに対する正常・欠陥判定の計算時間も短い。またユーザにとってもよく利いている特徴量がどれなのかわかりやすいというメリットがある。
【0031】
図13Bの曲線802は非線形サポートベクターマシン(以下非線形SVM:Support vector machine)によって求められた識別境界である。非線形SVMでは特徴ベクトルを超空間上の点に一度変換し,超空間上の超平面を求めることでデータを分割する。この超平面を2次元上で表現すると,802のような曲線になる。識別超平面は超空間上の正常部と欠陥部の特徴ベクトルの間に存在する最も大きなマージン(隙間)を通るような超平面が求められる。2次元上でこのマージンは曲線809と810の間813で表され,サポートベクターと呼ばれる図中の白点811と白罰点812の特徴ベクトルによって決定される。非線形SVMもLDAと同じように,本質的には1軸上にベクトルを射影ししきい値により正常欠陥を判定している。
【0032】
SVMの特徴としては,元の特徴量の次元において超曲面上の識別境界を求めるため,理想的な識別境界である404に近い識別境界を得ることができ,高い判定精度を持つ。
【0033】
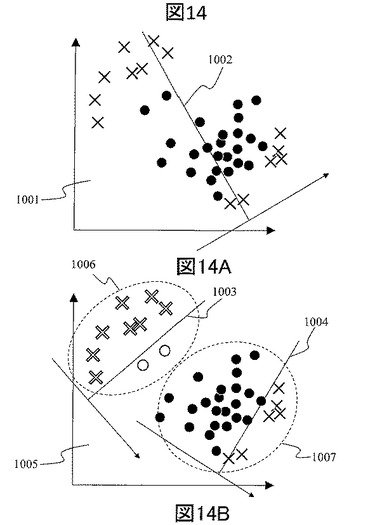
前述したような教示データセット904から特徴ベクトルを計算すると,図14aのグラフ1001に示すように欠陥部の特徴ベクトルが正常部の特徴ベクトルベクトルを挟んで対角線上に分布することがある。SVMでは曲線状の識別境界をとることができるので,このような特徴ベクトルの分布に対して対応可能であるが。LDAで求める識別境界は直線でしか表せないため,求められる識別境界は1002のようになり,有効な判別境界を求めるには限界がある。しかし,図14bのグラフ1005のデータ分布1006と1007に示すように,欠陥種毎に教示データを分割することで,二つの識別境界1003と1004を作成し,正しく判定することが可能となる。
【0034】
ここで良い識別境界を求める際,検査するウェハに対しての正常データと欠陥データを取得し,そのデータを使って算出したほうが精度のよいものが得られる。
しかし,新しい設計ルールやパターンのウェハを検査しなくてはならない場合,通常事前に欠陥データを手に入れることは難しい。そこで,これから検査を行うウェハにおいて事前に実パターンデータを取得し識別境界を算出する。
【0035】
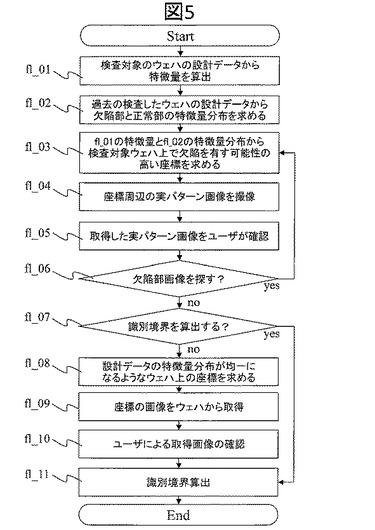
図5は新しいウェハ上から検査前に画像を撮像し,新たなデータを取得して識別境界を作成するフローを表わす。最初のステップfl_01で,検査対象となるウェハの設計データから,撮像する際の座標毎に特徴量の集合Aを算出する。次にステップfl_02において過去の検査したウェハの設計データから正常部の特徴量密度分布Ft(x)と欠陥部の特徴量の密度分布Ff(x)を計算する。ここでxは設計データから求められた特徴量ベクトルを表す。ステップfl_03では,ステップfl_01で求めた特徴量の集合Aから,ステップfl_02で求めた特徴量分布Ff(x)を用いて,過去の検査したウェハで欠陥となった特徴量の近傍に存在する設計データ特徴ベクトルa⊂Aの座標を算出する。具体的にはFf(a)が事前に設定したしきい値T以上になるような特徴量ベクトルaのパターン上の座標の集合Lfを算出する。ステップfl_04で,ウェハから座標集合Lfの実パターン画像を撮像する。ステップfl_05において撮像した画像をユーザがモニタでチェックし,正常か欠陥かを判断する。ステップfl_06では,継続して欠陥画像を探すかどうかを選択し,継続して欠陥を探す場合はステップfl_03に戻り,しきい値Tを下げて,撮像する画像の座標集合Lfを増やす。十分な欠陥部のデータが得られるか,欠陥部データがもう得られなさそうな時は次のステップへ進む。ステップfl_07では,ここまでで撮像した画像から識別境界を算出するか選択する。十分な欠陥部のデータが得ることができたのであれば,ステップfl_11に進み識別境界を算出する。欠陥部のデータが得られない場合や,得られてもごく少数の場合はステップfl_08に進み十分な正常部データを取得する方針に切り替える。ステップfl_08では特徴量集合Aから正常部の特徴量密度分布Ft(x)上で均一に分布するような特徴量の集合Bをサンプリングし,その特徴量を計算した元の実パターン画像上の座標集合Ltを求める。ステップfl_09ではウェハから座標集合Ltの実パターン画像を撮像する。ステップfl_10において得られた画像が正常か欠陥かを判断し,ステップfl_11において識別境界を算出する。
【0036】
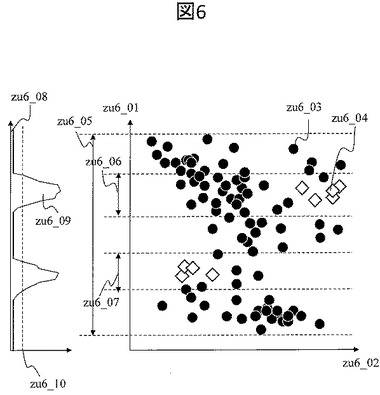
図5のステップfl_03とfl_08で新しいウェハからデータを取得する座標を算出する方法を説明する。図6の縦軸zu6_01は設計データの特徴量,横軸zu6_02は実パターンの特徴量である。黒点zu6_03は過去に検査したウェハの正常部の特徴ベクトル,白の菱形の点zu6_04は過去に検査したウェハの欠陥部の特徴ベクトルである。新しく検査するウェハは設計データの特徴量のみ計算されているので,各座標の特徴ベクトルが座標zu6_01上のどこに存在するかがわかる。そこで過去の検査データにおいて,欠陥が発生した設計データの特徴量の領域zu6_06,zu6_07の特徴量をもつ新しいウェハ上の座標を撮像する。ウェハ上の画像をランダムに撮像するよりも欠陥がでやすい設計データの座標を探しにいくので,新たな欠陥を見つける可能性が高い。検査するウェハの欠陥データが手に入れば,SVMやLDAなどの2クラス分類の枠組みで識別境界を算出すればよい。しかし,通常は正常部領域に比べ欠陥の数は極端に少ないため,欠陥画像を探す座標を絞ったとしても見つけることができないことが多い。また発生原因がこれまで検査した時と違うような欠陥であった場合,過去の欠陥の設計データの特徴量分布から探すことはできない。そこで正常部の画像データのみから,識別境界を作る方法を取ることもできる。この場合できるだけ全体の特徴量ベクトルを網羅するように,正常部データを取得する。これは,撮像する座標の設計データの特徴量分布が過去のデータの特徴ベクトル全体の領域zu6_05上に満遍なく分布するように取得するようにすることで実現する。プロファイルzu6_08は設計データの特徴量zu6_01に対する欠陥の密度関数Ff(x)である。しきい値T zu6_10以上の領域zu6_09が領域zu6_06に該当する。
【0037】
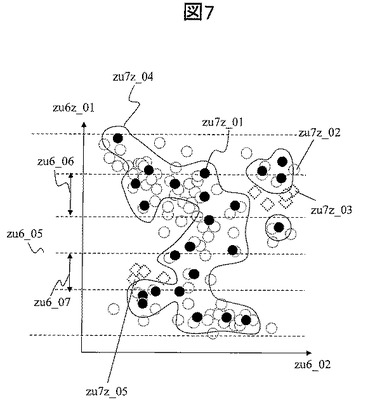
図7は,図6の特徴空間上の領域zu6_05,zu6_06,zu6_07を利用してウェハの撮像する座標を決め,正常部データのみで識別境界を作成した例である。黒点zu7_01は撮像して得られた正常部の特徴ベクトルで,白い丸点zu7_02は過去の正常部の特徴ベクトル,白い菱形の点zu7_03は過去の欠陥部の特徴ベクトルである。新たな正常部のデータを領域zu6_07からまんべんなく取得することで,正常領域内で分布が均一になるため,正常領域zu7_04を得られた特徴量ベクトルから精度よい識別境界zu7_05を作成することができる。またステップfl_03において,事前に欠陥データを取得しようとして領域zu6_05,zu6_06の取得している。これらの特徴ベクトルは欠陥部と正常部の本来の境界に近い点である可能性が高い。そのため正常部のデータのみで詳細な境界を作成することが可能となる。
【0038】
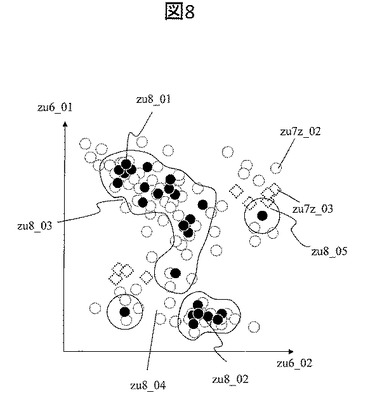
図8はランダムに正常部データをサンプリングして識別境界を作った例である。ランダムにデータを取得しているため特徴空間全体でzu8_01やzu8_02などの密度が高い領域のデータばかり取得する可能性が高い。そのため取得した特徴ベクトルは空間全体でまばらな分布となり,これらの正常データから求められた識別境界zu08_03は荒くなり,領域zu8_04のように正常領域が分離するように求められる。欠陥がある可能性が高い領域周辺のデータも取得されないため,欠陥領域付近の識別境界が領域zu8_05のように荒くなり,識別境界によって判定を誤る可能性が高くなる。
【0039】
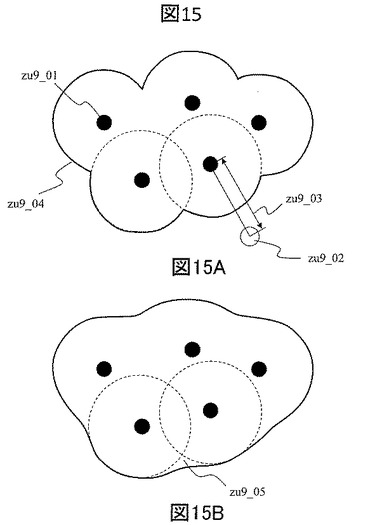
新しいウェハの画像を撮像して正常部の画像データのみ取得された場合,正常データから識別境界を作成する必要がある。図15では正常データのみで識別境界を作成する例である。
【0040】
ウェハを検査する際に撮像された画像から求めた特徴ベクトルが,事前に取得した正常データの特徴ベクトルと特徴空間上で近ければ,正常である可能性が高い。
【0041】
図15Aの黒点zu9_01は事前に取得した正常データの特徴ベクトルを表す。検査時に撮像した画像からzu9_02の特徴ベクトルが求められた時,k近傍法のように特徴空間上での最も近い正常データの特徴ベクトルとの距離zu9_03を求め,この距離がしきい値よりもT以下であれば正常,Tより大きければ欠陥と判定する。
zu9_04で表わされるような境界を作る。このTの大きさを変えることで,正常領域の大きさを調整することが可能である。
【0042】
またカーネル密度推定法(非特許文献3参照)を使うことで2つ以上の特徴ベクトルの値を反映させて滑らかな識別境界を作成することもできる。図15Bではカーネル密度推定により密度関数G(x)を生成し,G(x)<Tとなるような特徴空間を正常領域にすることで図15Aでは定義できないzu9_05のような領域も正常領域として定義することが可能となる。
【0043】
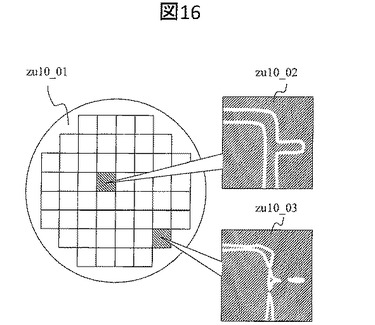
以上は過去に検査したウェハデータがあるという条件であったが,装置の使い初めではデータがないというケースもあり得る。この装置において初めて検査を行う時,記憶装置に過去の検査データがないため図5のfl_02において特徴量分布を求めることができない。通常のウェハはダイによって露光条件が同じため,露光起因のシステマティック欠陥が発生した場合,ダイと別のダイを比較しても欠陥がわからない。そこで初めて検査を行う時は,図16に示すFEMウェハzu10_01を作成する方法がある。FEMウェハでは,ダイzu10_02と位置の異なるダイzu10_03で異なる露光条件(露光量,ピント)を振っている。これらのダイの比較検査を行うことで,システマティック欠陥を探すことが可能である。他に初期のデータを手に入れる方法として,露光マスク設計時に作り込み欠陥を作成したウェハを撮像することで欠陥データを手に入れる方法がある。
【0044】
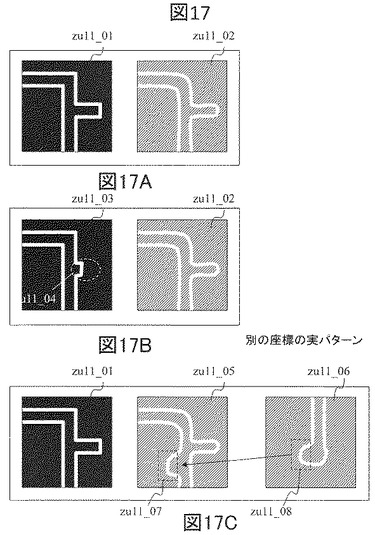
図17Aでは事前に検査対象のウェハを撮影し,正常部の設計データzu11_01と実パターンデータzu11_02のセットを得る。これらデータセットに対して,データを加工することで擬似欠陥を作り込む。図17Bの設計データzu11_03は,設計データzu11_01から配線zu11_04の部分を短くした設計データzu11_03を作成することで,zu11_02と比較した時,凸状の欠陥が発生しているとみることができる。また図17Cでは,実パターンデータzu11_02とは別の座標で撮像された実パターンデータzu11_06の領域zu11_08の画素配列を領域zu11_07にコピーすることで,欠陥付きの実パターンデータzu11_05を得ることができる。これら擬似欠陥画像データセットから求めた識別境界を用いて検査を行えばよく,次回の検査時に図5のステップを行えばよい。
【0045】
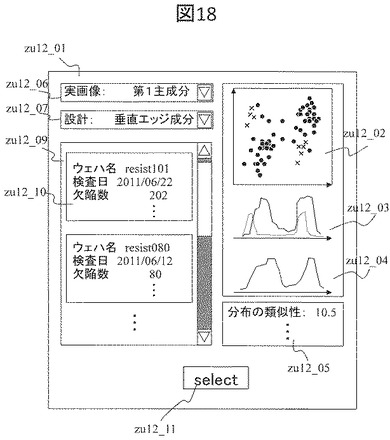
図18のzu12_01はデータベースの中から過去検査どのウェハのデータを使うか選択するためのGUIの例である。グラフzu12_02は,現在選択している過去のウェハデータの特徴量ベクトルを表示する。縦軸にzu12_06で選んだ実パターンデータの特徴量を,横軸にzu12_07で選んだ設計データの特徴量が割り当てられ,この2軸に対して,正常部の点と欠陥部の点で表わされる。zu12_03はデータベース中から選択した過去検査したウェハデータに対する特徴量zu_12_07のヒストグラムが表示される。zu_12_04にはこれから検査しようとしているウェハにおける設計データの特徴量zu_12_07のヒストグラムである。ユーザはzu12_03とzu12_04のヒストグラムを見比べえることで,検査するウェハの設計データに近いものを選択することができる。zu12_05は過去のウェハと検査対象のウェハの設計データの類似性などを表示するウインドウで,例えば,特徴量zu12_07の両者のヒストグラム間におけるカルバックライブラー距離などで計算することができる。ウインドウzu12_09にはzu12_10のように過去検査したウェハのデータが記入された表が,表の中には検査した日付や,検出した欠陥数,レジスト作成に用いたストッパーの情報などが記載され,これらの情報も過去のデータを選択する際の参考に用いるころができる。ウインドウzu12_09中の任意の表を選択することで図zu12_02の散布図へ反映される。
最終的に選択している過去データを検査に使う場合はボタンzu12_11を押せばよい。
【0046】
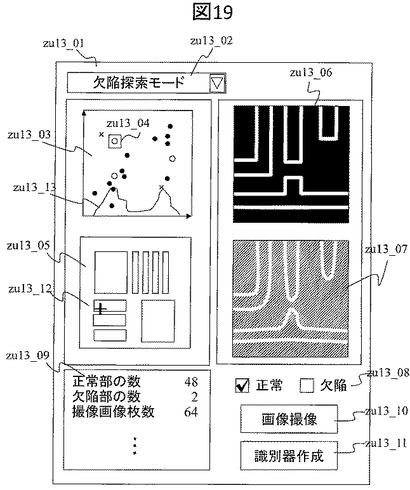
図19のzu13_01は検査対象のウェハからデータを取得する際に用いるGUIの例である。zu13_02で図5のステップfl_03,fl_04を行う欠陥探索モードとfl_08,fl_09を行う正常部取得モードを選択することができる。グラフzu13_03は実際に撮像し取得した実パターンデータから特徴量を算出し,設計データの特徴量と合わせて散布図を表示したものである。縦軸は図18のzu12_06で選択した実パターンデータの特徴量で横軸はzu12_07で選択した設計データの特徴量で,zu13_13はzu12_4のヒストグラムを表わす。散布点である特徴ベクトルの一つをクリックすることでzu13_04のようにカーソルが表示され,選択した特徴ベクトルの実パターンデータを確認し,正常か欠陥かの情報を付与することができる。zu13_05ではダイのマップが表示され,カーソルzu13_12は選択した特徴ベクトルのダイ上での座標を示している。zu13_06は選択した特徴ベクトルの座標に対応する設計データの画像で,zu_13_07は取得した実パターンデータの画像である。ユーザはこの二つの画像を確認することで,取得してきた実パターンデータが正常部か欠陥部かを確認する。確認結果はチェックボックスzu13_08に正常か欠陥のどちらかにチェックすることで情報を入力することができる。表zu13_09ではこれまで取得した実パターンデータの合計枚数や,正常と欠陥とで判断した数が表示され,ユーザが確認することができる。またグラフzu13_03において,正常と判断された特徴ベクトルは黒丸,欠陥と判断された特徴ベクトルは罰,確認をおこなっていない特徴ベクトルは白丸で表示される。これらの情報から,継続してデータの取得が追加で必要な場合は,ボタンzu13_10を押して追加で実パターンデータを撮像する。データが十分であるとユーザが判断した場合は,ボタンzu13_11を押し識別境界の作成を行う。
【0047】
(6)検査時の処理内容
図2の107によって算出された識別境界を用い,検査対象ウェハの欠陥検出を行う。
ウェハから得た実パターン画像とその設計データに対して,識別境界を算出に用いられた特徴量と同じ特徴量を算出(108a,108b)し,得られた特徴ベクトルに対して107で求められた識別境界で,正常・欠陥の判定を行う。実パターン特徴量の算出は,SEMによって実パターン画像が撮像された後に計算しなくてはならない。一方、設計データの特徴量は検査前に算出し,予め記憶装置に記憶しておくことで検査時の計算時間の削減になる。
【0048】
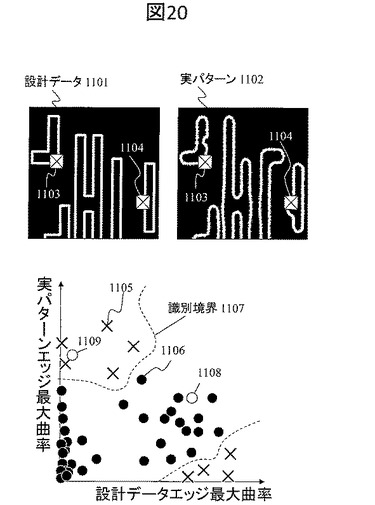
図20は,学習した識別境界から実際に検査対象ウェハの欠陥検出を行う例を示したものである。検査対象である設計データ1101と実パターン画像1102上の対応する画素1103から求めた特徴ベクトルはグラフ上の点1108に,画素1104から求められた特徴量ベクトルをグラフ上の点1109で表される。検査前準備段階においては正常部欠陥の特徴量ベクトル1106や欠陥部の特徴量ベクトル1105などから,SVMによる識別境界1107が求められている。この識別境界1107により,特徴ベクトル1108は正常部として1109は欠陥部として判定される。
【0049】
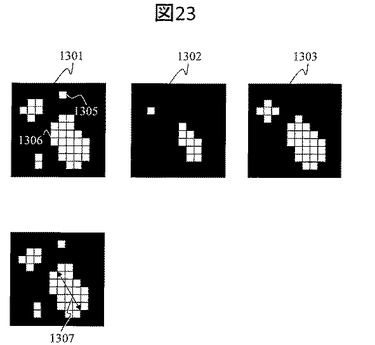
図21は画素単位の欠陥判定を行ったあとの後処理について説明する図である。欠陥判定で正常と判定された画素を黒,欠陥と判定された画素を白とした画像1301が得られる。この時,欠陥部は領域1306のように欠陥画素が連結して検出されるが,誤判定によって1画素もしくは数画素で連結された1305が同時に得られる。このような極小な領域はノイズとして除去する。具体的には欠陥画素に対してモルフォロジー演算などで縮退を行い(画像1302),膨張させることで画像1303のような画像が得られる。
【0050】
このほかに連結した欠陥画素の領域の長径1307を求め,予め設定または、求めたしきい値以上であれば欠陥領域とする方法などがある。
【0051】
最終的に判定された欠陥領域は,図2の110の判定結果表示においてユーザに確認される。
【0052】
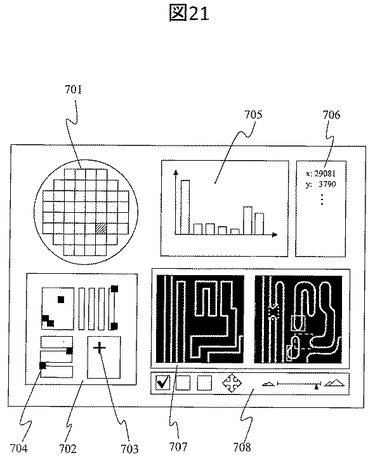
図22はGUIによる判定結果表示の例を示す。欠陥,701はウエハマップで,注目しているダイの位置や,おおまかな欠陥分布の位置を表示する。702はダイのマップで,注目している配線パターンの位置703の表示や大きな欠陥や欠陥頻度の多い領域などを点704にて表示する。705は欠陥種ごとに発生頻度のヒストグラムを表示する部分である。706は注目している配線パターンの座標情報や,表示倍率などを表示する部分である。707は注目している配線パターン領域の設計データと実パターンを表示する部分である。実パターン上には欠陥判定領域などが線で囲まれ表示される。708は操作パネルで,見たい配線パターンの位置や倍率,欠陥表示の切り替えなどが行える。
【0053】
(7)欠陥検出感度の調整
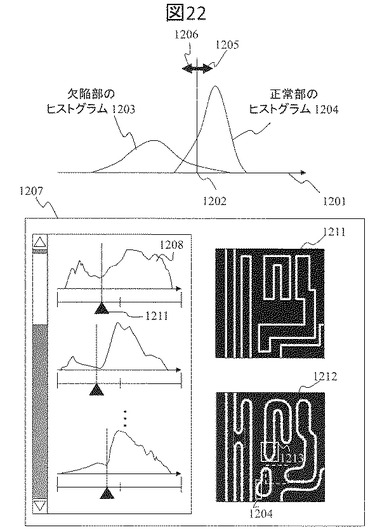
図23では,欠陥判定の感度調整について説明する。LDAやSVMによって求められた識別境界で欠陥判定を行うことは,特徴ベクトルを1201のような1軸上に射影してヒストグラムを求め,しきい値1202によってヒストグラムを2つに分けるという操作をしている。ヒストグラムは欠陥部の山1203と正常部の山1204の2つの山からなる。しきい値を1205の方向に移動することで欠陥に対する感度を,1206の方向に移動することで虚報を低減することができる。
【0054】
これを利用した欠陥種ごと感度調整の例を,GUI1207によって示す。欠陥種ごとの学習によって得られた複数の識別境界をもとに特徴ベクトルのヒストグラム1208のように複数表示する。ユーザは,ポインティングデバイス等を利用しスライダ1211を変化することでしきい値を調整する。調整後の判定結果は実パターン画像1212上に実時間で反映され,欠陥領域を1213や1214が表示と非表示を繰り返し、ユーザに示す。ユーザは設計データ1211と見比べながら,適切なしきい値に調整を行うことができる。
【0055】
以上述べたことから,本実施形態によれば,パターンの欠陥部と正常部または正常部のみから識別境界を生成し,虚報を多発させることのないシステマティック欠陥検査を実現することができる。また,識別境界を生成するためのデータを過去の検査データと設計データの特徴量分布を解析することで,検査対象の新しいウェハから事前に撮像する座標を求め,効率よく取得することができる。
【符号の説明】
【0056】
zu201…電子光学系、zu202…電子線源、zu203…コンデンサレンズ、 zu204…偏向器,zu205…対物レンズ,zu206…試料室,zu207…XYステージ,zu208…ウェハ,zu209…2次電子,zu210…検出器,zu211…A/D変換器,zu212…特徴分布算出部,zu213…特徴量算出部,zu214…撮像座標算出部,zu215…ステージコントローラ,zu216…偏向制御部,zu217…GUI,zu218…識別境界算出部,zu219…欠陥判定部,zu220…記憶装置,zu221…位置合わせ算出部
【技術分野】
【0001】
本発明は,半導体パターンの検査装置に関する。
【背景技術】
【0002】
半導体回路パターンの微細化に伴い、光露光装置の解像度は限界に達し、設計通りのパターンをウェハ上に形成することが困難になりつつある。半導体ウェハ上に形成されたパターンは,線幅が設計値からずれたり,あるいは,パターン先端に縮退が生じたり,あるいは,パターンの付け根の形状変化といった不良が発生しやすくなる。こうした欠陥は,システマティック欠陥と呼ばれ,全ダイで共通に発生するため,ダイ・ツー・ダイ(die to die)比較と呼ばれる隣接するダイ間での比較を行う方式では検出することが難しい。
【0003】
一方,特開2011−17705号公報(特許文献1)には,隣接ダイと比較する代わりに,検査対象パターンを,設計データと比較する方法が開示されている。具体的には,検査対象パターンから輪郭線を抽出し,これと,線分もしくは曲線で表現された設計データとを比較して,両者の乖離の程度に応じ,乖離が大きければ欠陥と判定する。設計データとの比較なので、全ダイで共通に発生するシステマティック欠陥であっても,原理的には検出可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2011−17705号公報
【非特許文献】
【0005】
【非特許文献1】N.ダラル,B.トリッグス著(N. Dalal, and B. Triggs)、「ヒストグラム・オブオリエンテッド・グラディエンツ・フォー・ヒューマン・ディテクション(Histograms of Oriented Gradients for Human Detection)」,コンピュータ・ビジョン・アンド・パターン・レコグニション(Computer Vision and Pattern Recognition),IEEE,2005年、第一号、p. 886-893,(アメリカ)
【非特許文献2】栗田多喜夫,速水悟 (T.Kurita, and S.Hayamizu) 著,「ジェスチャー・レコグニション・ユージング・エイチラック・フューチャーズ・オブ・パーコール・イメージズ・アンド・エイチエムエム・ベースド・レコガナイザー(Gesture Recognition using HLAC Features of PARCOR Images and HMM based Recognizer)」,プロセス・オブ・インターナショナル・カンファレンス・オン・オートマティック・フェイス・アンド・ジェスチャー・レコグニション(Proc. of Inter. Conf. on Automatic Face and Gesture Recognition),IEEE,1998年,p.422-427,(アメリカ).
【非特許文献3】C.M.ビショップ(C. M. Bishop)著,「パターン認識と機械学習 上 ベイズ理論による統計的予測」 ,初版,シュプリンガー・ジャパン株式会社,2006年12月10日, p.185-190
【非特許文献4】C.M.ビショップ(C. M. Bishop)著,「パターン認識と機械学習 下 ベイズ理論による統計的予測」,初版,シュプリンガー・ジャパン株式会社,2008年7月1日, p. 35-55
【発明の概要】
【発明が解決しようとする課題】
【0006】
第1の課題として,ウェーハ上に転写されたパターン上には,欠陥とはいえない設計データとの形状の乖離(コーナの丸みの違いなど)が多く存在する。前記特許文献1は,検査対象パターンから抽出した輪郭線と,線分もしくは曲線で表現された設計データとの乖離が大きければ欠陥と判定する方式であるため,上記のような欠陥とはいえない形状の乖離と,システマティック欠陥との判別が難しい。この結果,システマティック欠陥を検出しようとすると,欠陥とはいえない形状の乖離部分も検出され,虚報が多発するという問題があった。
【0007】
本発明は,虚報を多発させることなく,システマティック欠陥を検出することを目的とする。
【0008】
また第2の課題として,検査の条件出しには,欠陥座標が既知のウェハを用いることが望ましいが,そういったウェハが必ずしも手に入るとはかぎらないという問題がある。本発明では,短時間で検査の条件出しを行うための,有効なデータ(欠陥部データと正常部データ,及び正常部データのみ)を効率よく得ることを目的とする。
【課題を解決するための手段】
【0009】
上記第1の課題を解決するため,検査対象パターンと設計データから生成した基準パターンのデータから欠陥を検出する検査装置であって,
検査対象パターンの各座標において1個以上の特徴量(特徴量群1)を算出する手段と,基準パターンの各座標において1個以上の特徴量(特徴量群2)を算出する手段と,同じ座標の上記特徴量群1と上記特徴量群2を組み合わせて特徴ベクトルを算出する手段と,予め記憶された,特徴量空間上で欠陥と正常を識別するための境界面(識別境界面)を読み出す手段と,該読み出した識別境界面と,上記特徴ベクトルとを比較→特徴ベクトルとを特徴空間上で欠陥と正常の空間に分けることにより欠陥を検出する手段を備えることを特徴とする。
【0010】
さらに,上記識別境界面を算出するため,検査対象パターン上の欠陥が存在する領域である欠陥位置座標を指示するためのユーザインターフェース手段と,該検査対象パターン上で,該欠陥位置座標上,および,欠陥が存在しない正常な領域である正常位置座標で,それぞれ,欠陥ラベルを付与した特徴量群1と正常ラベルを付与した特徴量群1を算出する手段と,該検査対象パターンに対応する基準パターン上で,該欠陥位置座標上,および,該正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群2と正常ラベル付きの特徴量群2を算出する手段と,
該欠陥ラベル付きの特徴量群1と該欠陥ラベル付きの特徴量群2とをそれぞれ対応する座標で組み合わせた欠陥部特徴ベクトルを算出する手段と該正常ラベル付きの特徴量群1と該正常ラベル付き特徴量群2とをそれぞれ対応する座標で組み合わせた正常部特徴ベクトルを算出する手段と,
特徴量空間上で,該欠陥部特徴ベクトルと該正常部特徴ベクトルが,統計的に,もっとも引きはされるような境界面として識別境界面を算出する手段と,該識別境界面を記憶する手段とをさらに備えることを特徴とする。
【0011】
上記第2の課題を解決するため,検査対象パターンと設計データから生成した基準パターンとの比較により欠陥を検出する検査装置であって,
検査対象の試料の設計データと過去検査したデータを利用して検査対象のウェハから新たにパターン画像を撮像する座標を算出する手段と,
前記撮像した画像データを利用して欠陥判定方法を新たに作成する手段を
備えることを特徴とする。
【発明の効果】
【0012】
本発明によれば,予め,欠陥部と正常部を教示し,それに基づき,欠陥と正常を判別する識別境界面を求めるので,虚報を多発させることなく,システマティック欠陥を検出することができる。また,識別境界を作るための欠陥部データと正常部データ,及び正常部のみのデータを,事前に過去のデータと設計データの特徴量分布を解析することで,検査対象新しいウェハから撮像する場所を求め,効率よく取得することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の装置構成全体を示す図である。
【図2】本発明による欠陥判定方式のフローを示す図である。
【図3】特徴量を算出する時に使用するオペレータの例を示した図である。
【図4】電子線式パターン検査装置で撮像された画像の帯電の影響を示した図である。
【図5】過去のデータを利用して検査対象のウェハから事前に実パターンデータを取得するフローを示す図である。
【図6】過去の特徴ベクトルデータの分布の例を示した図である。
【図7】事前に取得した実パターンデータから識別境界を作成した例を示した図である。
【図8】事前に取得した実パターンデータから識別境界を作成した例を示した図である。
【図9】特徴空間上において正常と欠陥の二つの空間に分ける識別境界を示した概念図である。
【図10】特徴量を用いてif-thenルールで欠陥を判定する例を示した図である。
【図11】実パターン画像と設計データからGUIによる教示データの作成例を示した図である。
【図12】欠陥種別毎に教示を行う例とそのGUIを示した図である。
【図13】識別境界を求める手法であるLDAとSVMについて説明する図である。
【図14】図12によって得られる効果の例を示した図である。
【図15】正常部の特徴ベクトルから識別境界を作成する例を示した図である。
【図16】露光条件をダイ毎に変えたウェハを説明する図である。
【図17】取得した正常データを加工することで欠陥データを生成する例を示した図である。
【図18】過去の検査データを選択するGUIを示した図である。
【図19】取得した実パターンデータの確認と正常と欠陥の情報を入力するGUIを示した図である。
【図20】検査時に識別境界により欠陥判定を行う例を示した図である。
【図21】欠陥判定された画素から後処理で欠陥判定を行う例を示した図である。
【図22】欠陥判定の結果を表示するGUIの例を示した図である。
【図23】正常と欠陥を識別する際の感度調整を行う例とそのGUIを示した図である。
【図24】実パターンデータと設計データの位置合わせの例を説明する図である。
【図25】様々な欠陥の種類を示した例である。
【発明を実施するための形態】
【実施例1】
【0014】
(1)全体構成
図1に本発明に係るパターン検査装置の全体構成を示す。本実施の形態では,検査対象のウェハ画像を走査電子顕微鏡(SEM:Scanning Electron-beam Microscope)によって取得する。電子光学系zu201は,電子線を発生させる電子線源zu202と電子線を収束させるコンデンサレンズzu203,電子線をXY方向に偏向する偏向器zu204と,電子線を対象基板上に収束させる対物レンズzu205からなる。ウェハzu208を真空で保存する試料室zu206には,試料を設置するXYステージzu207を備える。電子線光源を照射することで試料から発生した2次電子zu209は検出器zu210で感知され,検出信号がA/D変換機zu211に送られデジタル画像に変換される。画像はバスzu222を通して記憶装置zu220に送られ、記憶する。バスzu222には特徴分布算出部zu212,特徴量算出部zu213,撮像座標算出部zu214,識別境界算出部zu218,欠陥判定部zu219,位置合わせ算出部zu221が接続されデータ処理が行われる。撮像座標算出部zu214によって算出した座標は偏向制御部zu216とステージコントローラzu215に送られ,実パターンデータの画像が撮像される。ユーザによる撮像した画像のチェックや操作の入力は表示部・GUIzu217によって行う。
【0015】
(2)前処理
欠陥検出などのデータ処理を行う前に,図1の位置合わせ算出部zu221において,撮像した実パターンデータと設計データの位置合わせを行う。
位置合わせの処理の例を図24に示す。zu24_01は画像化した設計データの一部で,撮像して取得した実パターン画像zu24_02の中心座標付近から得られたものである。zu24_01と同サイズの実パターン画像上の領域zu24_03において,zu24_01との正規化相互相関を計算し値を求める。この値をzu24_04の矢印で示したパス上にスキャンしながら計算し,最も値が大きくなる位置を求めることで,実パターン画像zu24_02上の設計データzu24_01の位置が特定できる。位置を求めたあとは,zu24_02の領域だけ画像化した設計データを取得する。
【0016】
(3)欠陥検出のフロー
図1の位置合わせ算出部zu221にて前記前処理で取得した位置合わせ済みの設計データと実パターン画像に対して,図2に示すフローで欠陥検出を行う。本発明では,検査に先立ち,前準備として,少数の実画像101と対応する設計データ102から,特徴量算出部zu212でそれぞれのパターンの特徴を表す特徴量を算出し(106a,106b),これと,欠陥座標が指定された教示データ103とから,正常と欠陥を識別するルールである識別境界を識別境界算出部zu219で算出する(107)。検査時には,検査対象の実画像104と,設計データ105から106a,106bと同様にして特徴量を算出し(108a,108b),これらに対し,検査前準備にて算出した識別境界107を適用することにより,欠陥判定部zu219で欠陥判定109を行う。
【0017】
以下,各処理内容(特徴量算出,識別境界の算出,欠陥判定,判定結果表示)について詳述する。
【0018】
(4)特徴量の算出
本発明では,上述のように,実画像および,設計データからそれぞれのパターンの特徴を表す特徴量を算出し,これらに対して,正常と欠陥を識別するルールを適用することで欠陥判定を行う。ここでは,特徴量の算出方法について述べる。
【0019】
始めに,実画像から算出する特徴量(図2の106a,108aに相当)について述べる。
【0020】
特徴量の算出は画素ごとに行う。図3の実パターン画像302において注目画素304の特徴量算出することを考える。注目画素の周辺画素における輝度値を組み合わせることで算出を行う。最終的によい識別境界を得るには,なるべく注目画素周辺のパターン形状の情報をよく表現するような特徴量であり,かつ特徴量の次元数が小さくなることが望ましい。
【0021】
もっとも単純な特徴量はオペレータ305のように注目画素の周辺画素におけるそれぞれの輝度値をそのまま特徴量にすることである。これは,オペレータサイズ分だけ実パターン形状の完全な情報をもっていることになるが,オペレータのサイズを大きくしていくと爆発的に特徴量の次元が増え,形状的な情報としては冗長すぎる。そこでオペレータ307のようなオペレータサイズだけの領域に対して様々な統計量を算出し,特徴量にするほうがよい。実パターン画像から求められる統計的な特徴量としては,
(a) オペレータ内の輝度の平均値
(b) モーメント特徴量
(c) HOG(Histograms of Oriented Gradients)特徴量(非特許文献1参照)
(d) 高次局所自己相関特徴量(非特許文献2参照)
などが有効である。さらにオペレータ310のように,注目画素の近傍において局所的な領域であるセル312の領域をとり,このセル毎に統計的な特徴量をとることで,注目画素回りの広い範囲の形状情報を特徴量として算出することができる。オペレータ315の例では,セルのHOG特徴量を算出することでセル316とセル317において垂直方向のエッジ成分が,セル318とセル319において斜め方向のエッジ成分が抽出され,注目画素はラインの角であることが表現される。また図4はSEM画像における帯電の影響を示した図である。一般的にSEM像を得る時は,電子ビームを501方向にスキャンすることで得られる。そのため,エッジ502が存在する領域のスキャン方向側に帯電の影響による影503が生じる。このような特徴も,オペレータ310で輝度の平均値を算出するなどで表現することができる。
【0022】
次に,設計データから算出する特徴量(図2の106b,108bに相当)について述べる。
設計データ301からも,対応する注目画素304の特徴量を算出する。設計データからの特徴量は輪郭線画像を作成し実パターン画像と同じ特徴量を求めてもよい。また,以下のような設計データ専用の特徴量として
(i) 配線構造のベクトル成分
(ii) 配線上であるか否か
(iii) ラインの端点,連結点の関係
などを算出することも効果的である。(i)は,設計データの注目画素周辺の配線方向がどちらに伸びているかの度合いである。(ii)は注目画素がパターン配線の上であるかどうかの特徴量を表す。(iii)は配線構造をグラフ構造にした時,エッジの端点と連結点の場所を求め,注目画素周辺にそれがどのように分布しているかの特徴量を表す。
【0023】
(5)識別境界の算出
正常と欠陥を識別するルールである識別境界(図2の107)の算出方法について述べる。識別境界とは106で求めた各特徴量を軸とする特徴空間401(図9参照)において欠陥の空間402と正常の空間403に分けるような識別超曲面(2次元上における曲線)404のことである。
【0024】
図5のフローにおいて欠陥データを取得することができた場合について述べる。正常と欠陥データの両方と用いて識別方法を生成する。正常と欠陥を識別するルールはそれぞれの特徴量に対して条件式を決めた図10の1401の例のようなif-thenルールがもっともシンプルである(xとyは特徴量を表す)。このルールを決定する時は解析的に求めても,しきい値であるA1とB1をユーザに入力してもらってもよい。特徴量空間上の欠陥判定領域を斜線部として1402に示す。黒丸点は正常部の画素から得られた特徴ベクトル,黒罰点は欠陥部の画素から得られた特徴ベクトルである。判定領域は特徴量の軸に垂直な辺を持つ矩形状の領域で定義される。1403のようにif-thenルールを増やすことで1404のように識別境界の精度を高めることが可能であるが,複雑な境界を矩形の組み合わせで表わすためルールが膨大に増え,ユーザによる調整が困難になる。真の識別境界がxとyで相関を持つ時などは,ax+byの線形和で表現される識別境界の1405や,非線形な関数で表わされる識別境界1406のほうがよりよい境界を求めることができる。これらの境界もユーザによるパラメータ調整で求めることは非常に困難であるが,既に正常か欠陥か既知である特徴ベクトルとする教示データから学習を行うことで,正常と欠陥の特徴ベクトルをもっともよく分けるような境界を求めることが可能である。また,教示データにユーザの意図が反映することができれば,識別境界も意図に沿って引くことが可能となる。
【0025】
始めに教示データ(図2の103)の作成方法について述べる。
図11は教示データを作成するためのGUIの例を示す。画像601は既に位置合わせ済みの実パターンから抽出した輪郭線602(線)と設計データの輪郭線603(点線)である。2つの輪郭線において形状に相違する領域がある時,604,605,606,607,608のような2つの輪郭線で囲まれた領域が生じる。ユーザは610の領域選択ツールを選び,画面上に表示される画像601から欠陥にしたい領域中の一点をポインティングデバイスで指定することで,輪郭線に囲まれた領域を選択することができる。実パターンの輪郭線が消失している部分は,鉛筆ツール611を選択し領域が閉じるように修正することができる。また誤って抽出された輪郭線や鉛筆ツールで修正をまちがえた部分は消しゴムツール612で消去することができる。
【0026】
613,614,615はカラー選択ボタンで白613を選択すると欠陥部を指定するモードに,黒614を選択すると正常部を指定するモードに,灰色615を選択するとユーザが欠陥か正常かわからない部分を選択するモードになる。教示画像作成において基本的にクリックされなかった点に関してはすべて正常部と見なす。この画像の場合,604,606,608を欠陥領域と判断し,白い領域を欠陥部,黒い領域を正常部とした教示画像609が作成され,確認することができる。
【0027】
図12における902は設計データ901に対する正常な実パターン画像の例である。ここで実際に取得した実パターン画像として903が得られたとすると,欠陥領域は領域905,906となる欠陥画像907が得られ,識別境界を求める時に使う学教示データのセット904を作成することができる。ここで欠陥画像907の領域905を設計データに対して実パターンのラインが膨張している凸欠陥に,領域906を設計データに対して実パターンのラインが縮退している凹欠陥に種類を分けることができる。この凸欠陥だけの教示画像909を教示データセットにした凸欠陥教示データセット908と,凹欠陥だけの教示画像911を教示データセットにした凹欠陥教示データセット910を作成する。908と910のデータセットそれぞれの識別境界を求めることで,欠陥検出と欠陥分類を同時に行うことができる。後述するが,これにより判定精度を高める効果や,欠陥種毎にユーザが感度の調整を行うことができるというメリットがある。図25は様々な欠陥の種類を示した例である。図25Aを例に図を説明すると,白線2501は実パターンのラインエッジ,輝度の高いグレーの領域2502は実パターンの背景領域,輝度の低いグレー領域2503は実パターンのライン,点線2504は設計データのラインの輪郭線を表わす。今回目的とするようなシステマティック欠陥検出では,欠陥種類を図25Aの凸欠陥,図25Bの凹欠陥,2つのラインが一部で繋がってしまう図25Cのブリッジング,2つのラインの接続箇所が切れて分断してしまう図25Dのネッキング,図25Eのライン幅の膨張,図25Fのライン幅の縮退などでわけるとよい。
912はこれら欠陥種毎に識別平面を求めるときに使うGUIを表示したものである。
【0028】
915の部分で904,908,910などの欠陥種別毎に分けたデータセットを選択することができ,また914の部分において選択したデータセットの特徴空間上の分布や各特徴量に対するヒストグラムが表示されユーザは確認することができる。913のボタンを押すことで,選択したデータセットに対する識別境界を求めることができる。
【0029】
識別境界の算出方法としては,一般的なパターン認識手法である,線形判別手法(LDA:Linear discriminant analysis),サポートベクターマシン(以下SVM:Support vector machine)が適用可能である(非特許文献3,および非特許文献4参照)
図13AにLDAの原理を示す。わかりやすくするために,設計データの特徴量を805の1次元,実パターンデータの特徴量を806の1次元として扱う。図中の803のような罰点は欠陥の特徴ベクトルであり,804のような丸点は正常の特徴ベクトルである。801は線形判別分析(以下LDA)によって求められた識別境界である。図中801は直線で表現されるが,実際の特徴ベクトルは3次元以上を取るので直線は超平面になる。直線801を境界にデータを分けることは全特徴ベクトルを特徴量の線形和を求めることで軸807に射影し,しきい値808で判別している事と同じである。LDAでは,射影された正常部の特徴ベクトル集合の分散σT2と欠陥部の特徴ベクトルσN2、全特徴ベクトルの分散σA2とした時に表される分離度J=(σT2+σN2)/ σA2を最大にするような射影軸を求める。
【0030】
LDAの特徴として特徴ベクトル集合の統計量から特徴量の線形和によって表現される識別面および識別境界を求めている。そのため特徴ベクトルの数が多くても学習時間が短く,1個の特徴ベクトルに対する正常・欠陥判定の計算時間も短い。またユーザにとってもよく利いている特徴量がどれなのかわかりやすいというメリットがある。
【0031】
図13Bの曲線802は非線形サポートベクターマシン(以下非線形SVM:Support vector machine)によって求められた識別境界である。非線形SVMでは特徴ベクトルを超空間上の点に一度変換し,超空間上の超平面を求めることでデータを分割する。この超平面を2次元上で表現すると,802のような曲線になる。識別超平面は超空間上の正常部と欠陥部の特徴ベクトルの間に存在する最も大きなマージン(隙間)を通るような超平面が求められる。2次元上でこのマージンは曲線809と810の間813で表され,サポートベクターと呼ばれる図中の白点811と白罰点812の特徴ベクトルによって決定される。非線形SVMもLDAと同じように,本質的には1軸上にベクトルを射影ししきい値により正常欠陥を判定している。
【0032】
SVMの特徴としては,元の特徴量の次元において超曲面上の識別境界を求めるため,理想的な識別境界である404に近い識別境界を得ることができ,高い判定精度を持つ。
【0033】
前述したような教示データセット904から特徴ベクトルを計算すると,図14aのグラフ1001に示すように欠陥部の特徴ベクトルが正常部の特徴ベクトルベクトルを挟んで対角線上に分布することがある。SVMでは曲線状の識別境界をとることができるので,このような特徴ベクトルの分布に対して対応可能であるが。LDAで求める識別境界は直線でしか表せないため,求められる識別境界は1002のようになり,有効な判別境界を求めるには限界がある。しかし,図14bのグラフ1005のデータ分布1006と1007に示すように,欠陥種毎に教示データを分割することで,二つの識別境界1003と1004を作成し,正しく判定することが可能となる。
【0034】
ここで良い識別境界を求める際,検査するウェハに対しての正常データと欠陥データを取得し,そのデータを使って算出したほうが精度のよいものが得られる。
しかし,新しい設計ルールやパターンのウェハを検査しなくてはならない場合,通常事前に欠陥データを手に入れることは難しい。そこで,これから検査を行うウェハにおいて事前に実パターンデータを取得し識別境界を算出する。
【0035】
図5は新しいウェハ上から検査前に画像を撮像し,新たなデータを取得して識別境界を作成するフローを表わす。最初のステップfl_01で,検査対象となるウェハの設計データから,撮像する際の座標毎に特徴量の集合Aを算出する。次にステップfl_02において過去の検査したウェハの設計データから正常部の特徴量密度分布Ft(x)と欠陥部の特徴量の密度分布Ff(x)を計算する。ここでxは設計データから求められた特徴量ベクトルを表す。ステップfl_03では,ステップfl_01で求めた特徴量の集合Aから,ステップfl_02で求めた特徴量分布Ff(x)を用いて,過去の検査したウェハで欠陥となった特徴量の近傍に存在する設計データ特徴ベクトルa⊂Aの座標を算出する。具体的にはFf(a)が事前に設定したしきい値T以上になるような特徴量ベクトルaのパターン上の座標の集合Lfを算出する。ステップfl_04で,ウェハから座標集合Lfの実パターン画像を撮像する。ステップfl_05において撮像した画像をユーザがモニタでチェックし,正常か欠陥かを判断する。ステップfl_06では,継続して欠陥画像を探すかどうかを選択し,継続して欠陥を探す場合はステップfl_03に戻り,しきい値Tを下げて,撮像する画像の座標集合Lfを増やす。十分な欠陥部のデータが得られるか,欠陥部データがもう得られなさそうな時は次のステップへ進む。ステップfl_07では,ここまでで撮像した画像から識別境界を算出するか選択する。十分な欠陥部のデータが得ることができたのであれば,ステップfl_11に進み識別境界を算出する。欠陥部のデータが得られない場合や,得られてもごく少数の場合はステップfl_08に進み十分な正常部データを取得する方針に切り替える。ステップfl_08では特徴量集合Aから正常部の特徴量密度分布Ft(x)上で均一に分布するような特徴量の集合Bをサンプリングし,その特徴量を計算した元の実パターン画像上の座標集合Ltを求める。ステップfl_09ではウェハから座標集合Ltの実パターン画像を撮像する。ステップfl_10において得られた画像が正常か欠陥かを判断し,ステップfl_11において識別境界を算出する。
【0036】
図5のステップfl_03とfl_08で新しいウェハからデータを取得する座標を算出する方法を説明する。図6の縦軸zu6_01は設計データの特徴量,横軸zu6_02は実パターンの特徴量である。黒点zu6_03は過去に検査したウェハの正常部の特徴ベクトル,白の菱形の点zu6_04は過去に検査したウェハの欠陥部の特徴ベクトルである。新しく検査するウェハは設計データの特徴量のみ計算されているので,各座標の特徴ベクトルが座標zu6_01上のどこに存在するかがわかる。そこで過去の検査データにおいて,欠陥が発生した設計データの特徴量の領域zu6_06,zu6_07の特徴量をもつ新しいウェハ上の座標を撮像する。ウェハ上の画像をランダムに撮像するよりも欠陥がでやすい設計データの座標を探しにいくので,新たな欠陥を見つける可能性が高い。検査するウェハの欠陥データが手に入れば,SVMやLDAなどの2クラス分類の枠組みで識別境界を算出すればよい。しかし,通常は正常部領域に比べ欠陥の数は極端に少ないため,欠陥画像を探す座標を絞ったとしても見つけることができないことが多い。また発生原因がこれまで検査した時と違うような欠陥であった場合,過去の欠陥の設計データの特徴量分布から探すことはできない。そこで正常部の画像データのみから,識別境界を作る方法を取ることもできる。この場合できるだけ全体の特徴量ベクトルを網羅するように,正常部データを取得する。これは,撮像する座標の設計データの特徴量分布が過去のデータの特徴ベクトル全体の領域zu6_05上に満遍なく分布するように取得するようにすることで実現する。プロファイルzu6_08は設計データの特徴量zu6_01に対する欠陥の密度関数Ff(x)である。しきい値T zu6_10以上の領域zu6_09が領域zu6_06に該当する。
【0037】
図7は,図6の特徴空間上の領域zu6_05,zu6_06,zu6_07を利用してウェハの撮像する座標を決め,正常部データのみで識別境界を作成した例である。黒点zu7_01は撮像して得られた正常部の特徴ベクトルで,白い丸点zu7_02は過去の正常部の特徴ベクトル,白い菱形の点zu7_03は過去の欠陥部の特徴ベクトルである。新たな正常部のデータを領域zu6_07からまんべんなく取得することで,正常領域内で分布が均一になるため,正常領域zu7_04を得られた特徴量ベクトルから精度よい識別境界zu7_05を作成することができる。またステップfl_03において,事前に欠陥データを取得しようとして領域zu6_05,zu6_06の取得している。これらの特徴ベクトルは欠陥部と正常部の本来の境界に近い点である可能性が高い。そのため正常部のデータのみで詳細な境界を作成することが可能となる。
【0038】
図8はランダムに正常部データをサンプリングして識別境界を作った例である。ランダムにデータを取得しているため特徴空間全体でzu8_01やzu8_02などの密度が高い領域のデータばかり取得する可能性が高い。そのため取得した特徴ベクトルは空間全体でまばらな分布となり,これらの正常データから求められた識別境界zu08_03は荒くなり,領域zu8_04のように正常領域が分離するように求められる。欠陥がある可能性が高い領域周辺のデータも取得されないため,欠陥領域付近の識別境界が領域zu8_05のように荒くなり,識別境界によって判定を誤る可能性が高くなる。
【0039】
新しいウェハの画像を撮像して正常部の画像データのみ取得された場合,正常データから識別境界を作成する必要がある。図15では正常データのみで識別境界を作成する例である。
【0040】
ウェハを検査する際に撮像された画像から求めた特徴ベクトルが,事前に取得した正常データの特徴ベクトルと特徴空間上で近ければ,正常である可能性が高い。
【0041】
図15Aの黒点zu9_01は事前に取得した正常データの特徴ベクトルを表す。検査時に撮像した画像からzu9_02の特徴ベクトルが求められた時,k近傍法のように特徴空間上での最も近い正常データの特徴ベクトルとの距離zu9_03を求め,この距離がしきい値よりもT以下であれば正常,Tより大きければ欠陥と判定する。
zu9_04で表わされるような境界を作る。このTの大きさを変えることで,正常領域の大きさを調整することが可能である。
【0042】
またカーネル密度推定法(非特許文献3参照)を使うことで2つ以上の特徴ベクトルの値を反映させて滑らかな識別境界を作成することもできる。図15Bではカーネル密度推定により密度関数G(x)を生成し,G(x)<Tとなるような特徴空間を正常領域にすることで図15Aでは定義できないzu9_05のような領域も正常領域として定義することが可能となる。
【0043】
以上は過去に検査したウェハデータがあるという条件であったが,装置の使い初めではデータがないというケースもあり得る。この装置において初めて検査を行う時,記憶装置に過去の検査データがないため図5のfl_02において特徴量分布を求めることができない。通常のウェハはダイによって露光条件が同じため,露光起因のシステマティック欠陥が発生した場合,ダイと別のダイを比較しても欠陥がわからない。そこで初めて検査を行う時は,図16に示すFEMウェハzu10_01を作成する方法がある。FEMウェハでは,ダイzu10_02と位置の異なるダイzu10_03で異なる露光条件(露光量,ピント)を振っている。これらのダイの比較検査を行うことで,システマティック欠陥を探すことが可能である。他に初期のデータを手に入れる方法として,露光マスク設計時に作り込み欠陥を作成したウェハを撮像することで欠陥データを手に入れる方法がある。
【0044】
図17Aでは事前に検査対象のウェハを撮影し,正常部の設計データzu11_01と実パターンデータzu11_02のセットを得る。これらデータセットに対して,データを加工することで擬似欠陥を作り込む。図17Bの設計データzu11_03は,設計データzu11_01から配線zu11_04の部分を短くした設計データzu11_03を作成することで,zu11_02と比較した時,凸状の欠陥が発生しているとみることができる。また図17Cでは,実パターンデータzu11_02とは別の座標で撮像された実パターンデータzu11_06の領域zu11_08の画素配列を領域zu11_07にコピーすることで,欠陥付きの実パターンデータzu11_05を得ることができる。これら擬似欠陥画像データセットから求めた識別境界を用いて検査を行えばよく,次回の検査時に図5のステップを行えばよい。
【0045】
図18のzu12_01はデータベースの中から過去検査どのウェハのデータを使うか選択するためのGUIの例である。グラフzu12_02は,現在選択している過去のウェハデータの特徴量ベクトルを表示する。縦軸にzu12_06で選んだ実パターンデータの特徴量を,横軸にzu12_07で選んだ設計データの特徴量が割り当てられ,この2軸に対して,正常部の点と欠陥部の点で表わされる。zu12_03はデータベース中から選択した過去検査したウェハデータに対する特徴量zu_12_07のヒストグラムが表示される。zu_12_04にはこれから検査しようとしているウェハにおける設計データの特徴量zu_12_07のヒストグラムである。ユーザはzu12_03とzu12_04のヒストグラムを見比べえることで,検査するウェハの設計データに近いものを選択することができる。zu12_05は過去のウェハと検査対象のウェハの設計データの類似性などを表示するウインドウで,例えば,特徴量zu12_07の両者のヒストグラム間におけるカルバックライブラー距離などで計算することができる。ウインドウzu12_09にはzu12_10のように過去検査したウェハのデータが記入された表が,表の中には検査した日付や,検出した欠陥数,レジスト作成に用いたストッパーの情報などが記載され,これらの情報も過去のデータを選択する際の参考に用いるころができる。ウインドウzu12_09中の任意の表を選択することで図zu12_02の散布図へ反映される。
最終的に選択している過去データを検査に使う場合はボタンzu12_11を押せばよい。
【0046】
図19のzu13_01は検査対象のウェハからデータを取得する際に用いるGUIの例である。zu13_02で図5のステップfl_03,fl_04を行う欠陥探索モードとfl_08,fl_09を行う正常部取得モードを選択することができる。グラフzu13_03は実際に撮像し取得した実パターンデータから特徴量を算出し,設計データの特徴量と合わせて散布図を表示したものである。縦軸は図18のzu12_06で選択した実パターンデータの特徴量で横軸はzu12_07で選択した設計データの特徴量で,zu13_13はzu12_4のヒストグラムを表わす。散布点である特徴ベクトルの一つをクリックすることでzu13_04のようにカーソルが表示され,選択した特徴ベクトルの実パターンデータを確認し,正常か欠陥かの情報を付与することができる。zu13_05ではダイのマップが表示され,カーソルzu13_12は選択した特徴ベクトルのダイ上での座標を示している。zu13_06は選択した特徴ベクトルの座標に対応する設計データの画像で,zu_13_07は取得した実パターンデータの画像である。ユーザはこの二つの画像を確認することで,取得してきた実パターンデータが正常部か欠陥部かを確認する。確認結果はチェックボックスzu13_08に正常か欠陥のどちらかにチェックすることで情報を入力することができる。表zu13_09ではこれまで取得した実パターンデータの合計枚数や,正常と欠陥とで判断した数が表示され,ユーザが確認することができる。またグラフzu13_03において,正常と判断された特徴ベクトルは黒丸,欠陥と判断された特徴ベクトルは罰,確認をおこなっていない特徴ベクトルは白丸で表示される。これらの情報から,継続してデータの取得が追加で必要な場合は,ボタンzu13_10を押して追加で実パターンデータを撮像する。データが十分であるとユーザが判断した場合は,ボタンzu13_11を押し識別境界の作成を行う。
【0047】
(6)検査時の処理内容
図2の107によって算出された識別境界を用い,検査対象ウェハの欠陥検出を行う。
ウェハから得た実パターン画像とその設計データに対して,識別境界を算出に用いられた特徴量と同じ特徴量を算出(108a,108b)し,得られた特徴ベクトルに対して107で求められた識別境界で,正常・欠陥の判定を行う。実パターン特徴量の算出は,SEMによって実パターン画像が撮像された後に計算しなくてはならない。一方、設計データの特徴量は検査前に算出し,予め記憶装置に記憶しておくことで検査時の計算時間の削減になる。
【0048】
図20は,学習した識別境界から実際に検査対象ウェハの欠陥検出を行う例を示したものである。検査対象である設計データ1101と実パターン画像1102上の対応する画素1103から求めた特徴ベクトルはグラフ上の点1108に,画素1104から求められた特徴量ベクトルをグラフ上の点1109で表される。検査前準備段階においては正常部欠陥の特徴量ベクトル1106や欠陥部の特徴量ベクトル1105などから,SVMによる識別境界1107が求められている。この識別境界1107により,特徴ベクトル1108は正常部として1109は欠陥部として判定される。
【0049】
図21は画素単位の欠陥判定を行ったあとの後処理について説明する図である。欠陥判定で正常と判定された画素を黒,欠陥と判定された画素を白とした画像1301が得られる。この時,欠陥部は領域1306のように欠陥画素が連結して検出されるが,誤判定によって1画素もしくは数画素で連結された1305が同時に得られる。このような極小な領域はノイズとして除去する。具体的には欠陥画素に対してモルフォロジー演算などで縮退を行い(画像1302),膨張させることで画像1303のような画像が得られる。
【0050】
このほかに連結した欠陥画素の領域の長径1307を求め,予め設定または、求めたしきい値以上であれば欠陥領域とする方法などがある。
【0051】
最終的に判定された欠陥領域は,図2の110の判定結果表示においてユーザに確認される。
【0052】
図22はGUIによる判定結果表示の例を示す。欠陥,701はウエハマップで,注目しているダイの位置や,おおまかな欠陥分布の位置を表示する。702はダイのマップで,注目している配線パターンの位置703の表示や大きな欠陥や欠陥頻度の多い領域などを点704にて表示する。705は欠陥種ごとに発生頻度のヒストグラムを表示する部分である。706は注目している配線パターンの座標情報や,表示倍率などを表示する部分である。707は注目している配線パターン領域の設計データと実パターンを表示する部分である。実パターン上には欠陥判定領域などが線で囲まれ表示される。708は操作パネルで,見たい配線パターンの位置や倍率,欠陥表示の切り替えなどが行える。
【0053】
(7)欠陥検出感度の調整
図23では,欠陥判定の感度調整について説明する。LDAやSVMによって求められた識別境界で欠陥判定を行うことは,特徴ベクトルを1201のような1軸上に射影してヒストグラムを求め,しきい値1202によってヒストグラムを2つに分けるという操作をしている。ヒストグラムは欠陥部の山1203と正常部の山1204の2つの山からなる。しきい値を1205の方向に移動することで欠陥に対する感度を,1206の方向に移動することで虚報を低減することができる。
【0054】
これを利用した欠陥種ごと感度調整の例を,GUI1207によって示す。欠陥種ごとの学習によって得られた複数の識別境界をもとに特徴ベクトルのヒストグラム1208のように複数表示する。ユーザは,ポインティングデバイス等を利用しスライダ1211を変化することでしきい値を調整する。調整後の判定結果は実パターン画像1212上に実時間で反映され,欠陥領域を1213や1214が表示と非表示を繰り返し、ユーザに示す。ユーザは設計データ1211と見比べながら,適切なしきい値に調整を行うことができる。
【0055】
以上述べたことから,本実施形態によれば,パターンの欠陥部と正常部または正常部のみから識別境界を生成し,虚報を多発させることのないシステマティック欠陥検査を実現することができる。また,識別境界を生成するためのデータを過去の検査データと設計データの特徴量分布を解析することで,検査対象の新しいウェハから事前に撮像する座標を求め,効率よく取得することができる。
【符号の説明】
【0056】
zu201…電子光学系、zu202…電子線源、zu203…コンデンサレンズ、 zu204…偏向器,zu205…対物レンズ,zu206…試料室,zu207…XYステージ,zu208…ウェハ,zu209…2次電子,zu210…検出器,zu211…A/D変換器,zu212…特徴分布算出部,zu213…特徴量算出部,zu214…撮像座標算出部,zu215…ステージコントローラ,zu216…偏向制御部,zu217…GUI,zu218…識別境界算出部,zu219…欠陥判定部,zu220…記憶装置,zu221…位置合わせ算出部
【特許請求の範囲】
【請求項1】
検査対象パターンと設計データから生成した基準パターンとの比較により欠陥を検出する検査装置であって,
検査対象パターンの各座標において1個以上の特徴量である特徴量群1を算出する手段と,
基準パターンの各座標において1個以上の特徴量である特徴量群2を算出する手段と,
同じ座標の前記特徴量群1と前記特徴量群2を組み合わせて特徴ベクトルを算出する手段と,
予め記憶された特徴量空間上で欠陥と正常を識別するための境界面である識別境界面を読み出す手段と,
該読み出した識別境界面と,前記特徴ベクトルとを比較することにより欠陥を検出する手段と,
検査対象の設計データと過去に検査に用いた設計データを利用して検査対象の試料から新たにパターン画像を撮像する座標を算出する手段と,
前記撮像した画像データを利用して識別境界面を新たに作成する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項2】
請求項1記載の半導体パターン検査装置であって,
検査対象パターン上で,欠陥位置座標を指示するためのユーザインターフェース手段と,
該検査対象パターン上で,該欠陥位置座標上,および,正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群1と正常ラベル付きの特徴量群1を算出する手段と,
該検査対象パターンに対応する基準パターン上で,該欠陥位置座標上,および,該正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群2と正常ラベル付きの特徴量群2を算出する手段と,
該欠陥ラベル付きの特徴量群1と該欠陥ラベル付きの特徴量群2とを組み合わせた欠陥部特徴ベクトルを算出する手段と
該正常ラベル付きの特徴量群1と該正常ラベル付き特徴量群2とを組み合わせた正常部特徴ベクトルを算出する手段と,
特徴量空間上で,該欠陥部特徴ベクトルと該正常部特徴ベクトルが,統計的に,もっとも引きはなされるような境界面として識別境界面を算出する手段と,
該識別境界面を記憶する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項3】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの欠陥部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データの基準パターンから欠陥になる可能性が高い座標を算出する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項4】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの正常部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データのウェハの基準パターンから特徴空間上で均一な前記特徴ベクトルを持つような座標を算出する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項5】
請求項4に記載の半導体パターン検査装置であって,
正常部データのみから前記識別境界を算出する手段を備えることを特徴とする半導体パターン検査装置。
【請求項6】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記過去検査対象は半導体ウェハであって,
前記取得したデータは,別の検査装置によって得られたデータと,及び作り込み欠陥があるウェハから得られたデータと,及び露光条件が異なるダイを持つウェハから得られたデータとを含むことを特徴とする半導体パターン検査装置。
【請求項7】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの欠陥部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データの基準パターンから欠陥になる可能性が高い座標を算出する手段と,
該分布と検査対象の設計データのウェハの基準パターンから特徴空間上で均一な前記特徴ベクトルを持つような座標を算出する手段とを有し、
前記欠陥になる可能性が高い座標を算出する手段と、前記特徴ベクトルを持つような座標を算出する手段とを切り替える手段とを備えることを特徴とする半導体パターン検査装置。
【請求項8】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記過去の検査したデータの中から使いたいデータを選択する手段を備えることを特徴とする半導体パターン検査装置。
【請求項9】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記検査対象パターンが,レジストパターンであることを特徴とする半導体パターン検査装置。
【請求項10】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記設計データから生成した基準パターンが,設計データを入力としてリソグラフィーシミュレータで生成したパターン輪郭線であることを特徴とする半導体パターン検査装置。
【請求項11】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記検査対象パターンの画像撮像手段が,走査電子顕微鏡であることを特徴とする半導体パターン検査装置。
【請求項12】
請求項1または請求項2記載の半導体パターン検査装置であって,検査対象パターン上で,欠陥種ごとに欠陥位置座標を指示するユーザインターフェース手段と,
欠陥種ごとに検査結果を出力する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項13】
請求項1または請求項2記載の半導体パターン検査装置であって,識別境界面の算出方法が線形判別手法に基づくことを特徴とする半導体パターン検査装置。
【請求項14】
請求項1または請求項2記載の半導体パターン検査装置であって,識別境界面の算出方法がサポート・ベクター・マシーン手法に基づくことを特徴とする半導体パターン検査装置。
【請求項15】
請求項1または請求項2に記載の半導体パターン検査装置であって,
検査感度をユーザインターフェースによって調整する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項1】
検査対象パターンと設計データから生成した基準パターンとの比較により欠陥を検出する検査装置であって,
検査対象パターンの各座標において1個以上の特徴量である特徴量群1を算出する手段と,
基準パターンの各座標において1個以上の特徴量である特徴量群2を算出する手段と,
同じ座標の前記特徴量群1と前記特徴量群2を組み合わせて特徴ベクトルを算出する手段と,
予め記憶された特徴量空間上で欠陥と正常を識別するための境界面である識別境界面を読み出す手段と,
該読み出した識別境界面と,前記特徴ベクトルとを比較することにより欠陥を検出する手段と,
検査対象の設計データと過去に検査に用いた設計データを利用して検査対象の試料から新たにパターン画像を撮像する座標を算出する手段と,
前記撮像した画像データを利用して識別境界面を新たに作成する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項2】
請求項1記載の半導体パターン検査装置であって,
検査対象パターン上で,欠陥位置座標を指示するためのユーザインターフェース手段と,
該検査対象パターン上で,該欠陥位置座標上,および,正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群1と正常ラベル付きの特徴量群1を算出する手段と,
該検査対象パターンに対応する基準パターン上で,該欠陥位置座標上,および,該正常位置座標で,それぞれ,欠陥ラベル付きの特徴量群2と正常ラベル付きの特徴量群2を算出する手段と,
該欠陥ラベル付きの特徴量群1と該欠陥ラベル付きの特徴量群2とを組み合わせた欠陥部特徴ベクトルを算出する手段と
該正常ラベル付きの特徴量群1と該正常ラベル付き特徴量群2とを組み合わせた正常部特徴ベクトルを算出する手段と,
特徴量空間上で,該欠陥部特徴ベクトルと該正常部特徴ベクトルが,統計的に,もっとも引きはなされるような境界面として識別境界面を算出する手段と,
該識別境界面を記憶する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項3】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの欠陥部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データの基準パターンから欠陥になる可能性が高い座標を算出する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項4】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの正常部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データのウェハの基準パターンから特徴空間上で均一な前記特徴ベクトルを持つような座標を算出する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項5】
請求項4に記載の半導体パターン検査装置であって,
正常部データのみから前記識別境界を算出する手段を備えることを特徴とする半導体パターン検査装置。
【請求項6】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記過去検査対象は半導体ウェハであって,
前記取得したデータは,別の検査装置によって得られたデータと,及び作り込み欠陥があるウェハから得られたデータと,及び露光条件が異なるダイを持つウェハから得られたデータとを含むことを特徴とする半導体パターン検査装置。
【請求項7】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記パターン画像を撮像する座標を算出する手段は,
過去の検査した基準パターンの欠陥部から求めた特徴量群2の特徴空間上の分布を求める手段と,
該分布と検査対象の設計データの基準パターンから欠陥になる可能性が高い座標を算出する手段と,
該分布と検査対象の設計データのウェハの基準パターンから特徴空間上で均一な前記特徴ベクトルを持つような座標を算出する手段とを有し、
前記欠陥になる可能性が高い座標を算出する手段と、前記特徴ベクトルを持つような座標を算出する手段とを切り替える手段とを備えることを特徴とする半導体パターン検査装置。
【請求項8】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記過去の検査したデータの中から使いたいデータを選択する手段を備えることを特徴とする半導体パターン検査装置。
【請求項9】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記検査対象パターンが,レジストパターンであることを特徴とする半導体パターン検査装置。
【請求項10】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記設計データから生成した基準パターンが,設計データを入力としてリソグラフィーシミュレータで生成したパターン輪郭線であることを特徴とする半導体パターン検査装置。
【請求項11】
請求項1または請求項2に記載の半導体パターン検査装置であって,
前記検査対象パターンの画像撮像手段が,走査電子顕微鏡であることを特徴とする半導体パターン検査装置。
【請求項12】
請求項1または請求項2記載の半導体パターン検査装置であって,検査対象パターン上で,欠陥種ごとに欠陥位置座標を指示するユーザインターフェース手段と,
欠陥種ごとに検査結果を出力する手段とを備えることを特徴とする半導体パターン検査装置。
【請求項13】
請求項1または請求項2記載の半導体パターン検査装置であって,識別境界面の算出方法が線形判別手法に基づくことを特徴とする半導体パターン検査装置。
【請求項14】
請求項1または請求項2記載の半導体パターン検査装置であって,識別境界面の算出方法がサポート・ベクター・マシーン手法に基づくことを特徴とする半導体パターン検査装置。
【請求項15】
請求項1または請求項2に記載の半導体パターン検査装置であって,
検査感度をユーザインターフェースによって調整する手段とを備えることを特徴とする半導体パターン検査装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2013−98267(P2013−98267A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−238184(P2011−238184)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]