
半導体パターン計測方法及び半導体パターン計測装置
【課題】
半導体ウェーハ上のパターン寸法を計測する方法において、ユーザは計測手法を選定する際に、任意のパターン形状を目視しただけではその適用可否を判断することは難しく、自動で計測手法を選択する場合は、測定対象のパターン形状に適した手法が選定されないことがある。
【解決手段】
電子線により撮像された半導体パターン像の寸法を計測する方法において、ユーザによりパターン上の計測対象部を指定し、パターン計測部から形状情報を抽出し、抽出した形状情報を基に予め作成しておいた計測手法ライブラリから適用可能な計測手法を選定し、選定された手法によりパターンの寸法の計測をし、計測された寸法を出力するようにした。
半導体ウェーハ上のパターン寸法を計測する方法において、ユーザは計測手法を選定する際に、任意のパターン形状を目視しただけではその適用可否を判断することは難しく、自動で計測手法を選択する場合は、測定対象のパターン形状に適した手法が選定されないことがある。
【解決手段】
電子線により撮像された半導体パターン像の寸法を計測する方法において、ユーザによりパターン上の計測対象部を指定し、パターン計測部から形状情報を抽出し、抽出した形状情報を基に予め作成しておいた計測手法ライブラリから適用可能な計測手法を選定し、選定された手法によりパターンの寸法の計測をし、計測された寸法を出力するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウェーハ上のパターン寸法を計測する分野において、特に任意のパターン形状に対し、その形状に適した計測手法を選定する方法および装置に関するものである。
【背景技術】
【0002】
半導体パターンの寸法計測では、走査型電子顕微鏡により撮像された高解像度画像を基に、画像上のパターンエッジを検出し、そのエッジ座標から寸法計測を行う。従来の計測対象パターンの形状は基本的にラインやホールに限られていたため、以前から確立されている計測手法を用いることで高い計測再現性を得ることが可能であった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−302952公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
半導体パターン回路の微細化に伴い、従来のラインやホールとは異なる複雑形状パターンが増加傾向にある。これらのパターンは従来の計測手法では計測精度が低下するケースが多いため、そのパターン形状に応じた計測手法が多数開発されてきた。これらの計測手法は、開発対象としたパターンに類似したパターン形状には適用できるケースが多いが、形状を目視しただけではその適用可否を判断することはできないため、各計測手法の適用可否及びその有効性を検討し、試行錯誤の上適切な計測手法を設定してきた。しかし近年、パターン形状の多様化がますます進行し、より効率的に新規形状パターンに適した計測手法を選定する必要性が高まっている。
【0005】
特許文献1では、走査型電子顕微鏡により撮像された画像データの付帯情報に基づいて判断して計測レシピを選択し、計測処理を行う方法が開示されている。この付帯情報とは取得された画像データとこの画像データのロット情報や計測条件等とされている。計測方法においては、メーカの異なるCDSEMにより画像を取得しても、パターンの計測方法が同一であるとされている。画像上のパターン形状を定量的に捉える方法については記載がない。そのため、選択される計測レシピが必ずしも測定対象のパターン形状に適した手法とは限らない。
【0006】
本発明は、半導体ウェーハ上のパターン寸法を計測する分野において、特に任意のパターン形状に対し、その形状に適した計測手法を選定する方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、特に新規パターンの形状に応じた計測手法を効率的に選定することを支援する手法および装置に関するものであり、特に以下の手段により上記課題を解決する。
【0008】
すなわち、本発明では、上記課題を解決するために、電子線により撮像された半導体パターン像の寸法を計測する方法において、ユーザによりパターン上の計測対象部を指定するステップと、パターン計測部から形状情報を抽出するステップと、抽出した形状情報を基に予め作成しておいた計測手法ライブラリから適用可能な計測手法を選定するステップと、選定された手法によりパターンの寸法の計測を行うステップと、計測された寸法を出力するステップを有することを特徴とする半導体パターン寸法の計測方法を提供する。
【発明の効果】
【0009】
本発明によれば、半導体ウェーハ上のパターン寸法を計測における計測手法の選定を行う場合において、効率が向上する。
【図面の簡単な説明】
【0010】
【図1】半導体パターン計測装置の全体構成の例を示す図である。
【図2】本計測処理ステップの一例を示す図である。
【図3】計測対象パターンの撮像画像の一例を示す図である。
【図4】計測ボックス設置後の計測対象パターン画像を示す図である。
【図5】ユーザ入力GUIの一例を示す図である。
【図6】計測対象パターン上のエッジ検出の様子を示す図である。
【図7】パターンエッジ位置を算出する信号波形の一例を示す図である。
【図8】計測対象パターンの左右エッジ点列の平行性を評価する様子を示す図である。
【図9】計測対象パターンの左右エッジ点列の直線性を評価する様子を示す図である。
【図10】計測対象パターンの左右エッジ点列の曲線近似性を評価する様子を示す図である。
【図11】取得したパターン情報の集計結果の一例を示す図である。
【図12】適用可能計測手法の選定処理の一例を示す図である。
【図13】計測手法の適用可否判定フローチャートの一例を示す図である。
【図14】計測手法の適用可否判定フローチャートの一例を示す図である。
【図15】パターン寸法計測の一例を示す図である。
【図16】パターン計測の出力画面の一例を示す図である。
【図17】計測対象パターンの撮像画像の一例を示す図である。
【図18】計測ボックス設置後の計測対象パターン画像を示す図である。
【図19】適用可能計測手法の選定処理の一例を示す図である。
【図20】計測手法の一つである波形投影法を適用したときの様子を示す図である。
【図21】パターンエッジ位置を算出する信号波形の一例を示す図である。
【図22】パターン計測の出力画面の一例を示す図である。
【発明を実施するための形態】
【実施例1】
【0011】
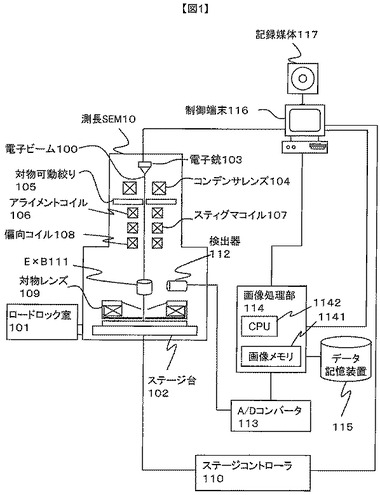
図1に本発明に関わる半導体パターン測定装置の全体構成図を示す。本実施形態である測長SEM10は、計測用ウェーハを設置するサンプルステージ、放出した電子ビーム100を制御する照射光学系、試料上から放出される2次電子を検出する検出系により構成される。サンプルステージは、計測用ウェーハを搬送するロードロック室101と搬送されたウェーハを固定するステージ台102により構成される。照射光学系は、電子銃103および電子ビーム100の経路上にあるコンデンサレンズ104、対物可動絞り105、アライメントコイル106、スティグマコイル107、偏向コイル108、対物レンズ109により構成される。放出した電子ビーム100は、コンデンサレンズ104を経てアライメントコイル106、スティグマコイル107により電子ビーム100の照射位置ずれ、非点収差を補正され、偏向コイル108によりサンプル上の照射位置を制御され、対物レンズ109により集光されて102上のサンプルウェーハに照射される。また、ステージコントローラ110はステージ台102上のウェーハへの電子ビーム100照射位置を制御している。検出系は、E×B111、検出器112により構成される。E×B111では、電子ビーム100の照射によりサンプル内から発生した2次電子に電界および磁界をかけることで、2次電子を検出器112の方向に誘導する。曲げられた2次電子を検出器112により検出する。検出された2次電子はA/Dコンバータ113によりデジタル信号に変換され、画像処理部114内のメモリ1141に画像として格納される。画像処理部114では、メモリ1141内に格納された画像及び制御端末116より入力された情報を用いてデータ記憶装置115に記憶されている計測手法ライブラリから計測手法データを取出し、パターン寸法計測等を行なう。あらかじめ計測手法ライブラリ内に、計測手法データを一つ以上ライブラリ化して記憶しておく。また、計測手法ライブラリには、計測を実行するための計測プログラムが記録されており、計測手法と対応している。ここで、計測プログラムとは、計測手法による計測を実行するために計測手順を記録したものであり、計測手法と同義である。ここで、計測手法データとは、計測手法とその計測手法が適用可能なパターンの条件を示す計測手法適用要件の情報により構成されている。計測手法適用情報の一例は、図に12の計測手法適用要件格納テーブル1201に示す。画像処理部114の詳細については後述する。116はマウスやキーボード等の入力装置やモニタ等の表示装置を有する装置全体の制御端末を示しており、測長SEM10全体を制御し、電子ビーム100の照射条件の調整やウェーハ上への照射位置等を統括し、かつ画像処理部114の処理方法の制御および処理画像の出力を行うことができる。なお、画像処理部114での処理は、予め設定された画像処理プログラムを有する記録媒体117に記録されているプログラムに従って制御される。
【0012】
図2に、本実施例による計測処理フローの一例を示す。本処理は、画像処理部114、データ記憶装置115、制御端末116を用いて行われる。画像処理部114はメモリ1141及びCPU1142により構成されており、制御端末116により制御される。まず、ステップ201では、CPU1142により1枚または複数枚の画像をメモリ1141に読み込む。次に、ステップ202では、制御端末116により入力されたユーザ入力情報及びCPU1142により読み込んだ画像のパターン形状抽出によりパターン情報を作成し、メモリ1141に保存する。ここで、パターン情報とは、ユーザ入力情報とパターン形状情報とから構成され、例として図12のパターン情報1101に示す。ステップ203では、データ記憶装置115に格納してある計測手法適用要件の情報をメモリ1141に読み込み、CPU1142によりパターン情報と計測手法適用要件の情報を照合し、計測手法の適用可否の判定結果をメモリ1141に保存する。判定結果の一例を、図12の適用可否判定結果格納テーブル1202に示す。さらに、ステップ204では、適用可能と判定された計測手法をライブラリ115からメモリ1141に読み込み、CPU1142により寸法の計測を行う。最後に、ステップ205では、得られた結果を制御端末116に送信し、計測結果を出力する。以下、各ステップの具体的内容を詳述する。
【0013】
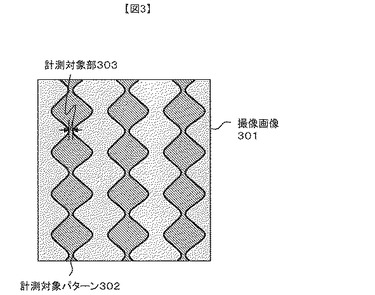
まず、ステップ201で読み込まれる撮像画像の例を301に示す。撮像画像301上には、図3に示すような左右エッジが周期的に蛇行しているラインパターンが撮像されており、本パターンを計測対象パターン302とする。ここでは、計測対象パターン302の局所的に狭くなっている部分のライン幅を計測対象部303とする。
【0014】
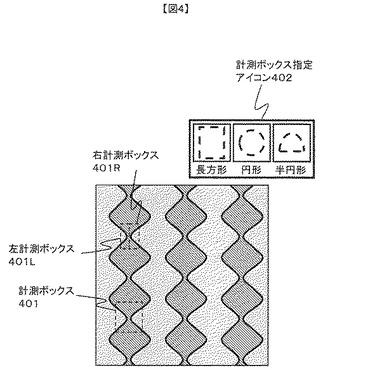
次に、ユーザ入力情報を入力するユーザ入力ステップ202−aについて説明する。ユーザ入力情報とは、ユーザの指示に基づく情報で、画像処理により得ることが困難又は不可能なものを含む情報であり、例えば画像内の計測対象部303の位置や計測値が平均値か或いは最小値かなどが挙げられる。ここでは、ユーザ入力情報の例として撮像画像301上の計測位置と計測範囲、計測項目、計測対象、繰返し性を述べるが、ユーザ入力情報はその限りではなく、また、これらの項目が必ず入力されなければならない訳でもない。図4は制御端末116の表示装置に表示された撮像画像301であり、計測ボックス401を指定した様子を示している。計測ボックス401とは、計測対象部303を包含する計測領域であり、その位置や範囲は、制御端末116の表示装置上に示された撮像画像301内の位置をマウス等の入力装置により指示することで指定する。また、ここでは計測ボックス401の形状を長方形としているが、円形状や半円状など、計測対象パターン302の形状に応じ、例えば図4の402に示すアイコンで指示することにより、計測ボックス401の形状を選択することもできる。さらに、ここでは、図4に示すように計測ボックス401を左右エッジ別に設置するものとし、便宜上、左側に設置したものを401L、右側に設置したものを401Rと呼ぶが、合体させて1つの計測ボックス401として設置しても良い。また、計測ボックス401は回転させて設置することもできるものとし、例えば90度回転させて設置した場合、計測ボックス401L、Rは上下に配置される。これは、計測対象部が上下エッジ間の距離である場合等に用いる。
【0015】
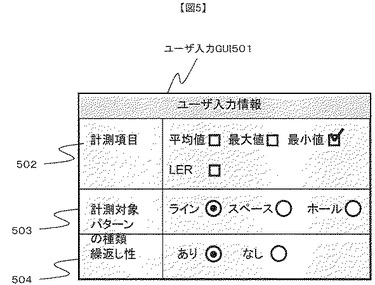
図5は、制御端末116の表示装置上に表示させるユーザ入力情報を入力するGUI501の例である。計測項目502ではパターンの寸法のみでなく、LER(Line Edge Roughness)等のラフネス等も指定できる。また、計測対象503とは、計測対象部303の形状の種類を指定する項目である。ここで、入力されるパターンの形状は多種多様であるが、どのような形状であっても計測対象部303は大別するとパターンの幅かギャップか径のいずれかになり、それぞれ適用可能な計測手法が異なる。そこで、パターン幅の場合はラインを、ギャップの場合はスペースを、径の場合はホールを指定するものとする。ここではGUI501上で指定するものとしたが、計測ボックス形状指定アイコン402等により計測ボックス401の形状を指示することで、自動的に計測対象503を指定するものとしてもよい。さらに、繰返し性504は、同一画像内のパターンの繰返し性の有無を指定するものである。ここでは、計測対象部303はライン上の局所的に狭くなっている部分のライン幅であるため、計測項目502は最小幅を、計測対象503はラインを指定し、この局所的に狭い箇所は画像301上で繰返し出現しているため、繰返し性504は「あり」が選択された状態を示している。
【0016】
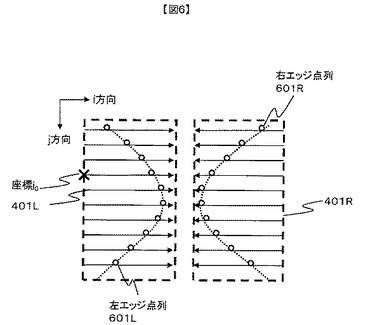
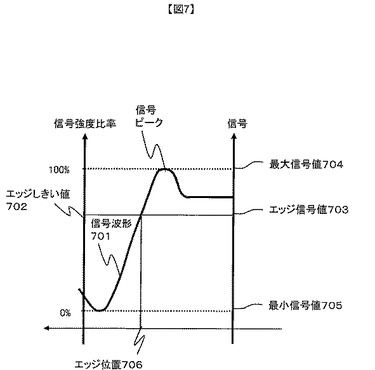
次に、形状情報取得ステップ202−bについて述べる。形状情報とは、撮像画像301から抽出できるパターン計測対象部の形を定量的に評価した情報であり、例えば計測対象部が直線か否かといったことが挙げられる。抽出は自動で行ってもよい。ここでは、抽出方法の例としてパターンエッジを用いた方法を述べる。図6に示すように、計測ボックス401L、R内のパターン形状情報を抽出する。ここでは、計測ボックス401Lを用いて説明し、便宜上、撮像画像301の水平方向をi方向、垂直方向をj方向とする。まず、計測ボックス401L内のj方向のある座標j0で、図7に示すi方向の信号波形701を取得する。取得範囲は、計測ボックス401Lの左端から右端までとする。図7において、パターン上のエッジ付近では画素値が高くなるため、信号波形701はエッジ付近で信号ピークが発生した形状となる。次に、事前に指定しておいたエッジしきい値702により、エッジ信号値703を算出する。エッジしきい値702はユーザにより任意に指定できるパラメータであり、信号波形701上の最大信号値704を100%、最小信号値705を0%としたときの信号強度比率を表す。このエッジしきい値702はどのタイミングで指定してもかまわないが、ここではユーザ入力ステップ202−aでユーザ入力情報と一緒に入力したものとする。以下にエッジ信号値703を求める算出式を示す。
(数1)

【0017】
最後に信号波形701上からエッジ信号値703と一致する座標をエッジ位置706として検出する。本処理を、計測ボックス401L内のj方向の各座標で行い、計測ボックス401内のエッジ点列601Lを算出する。本例では、パターン形状によって信号波形701の取得方向をi方向としたが、計測対象部303の形状に応じて取得方向をユーザが変更しても良い。本処理を左右両計測ボックス401L、Rで個別に行い、エッジ点列601L、Rを検出する。ここで、両計測ボックス401L、R内の検出したエッジ点数は同一とし、その点数はN点としておく。
【0018】
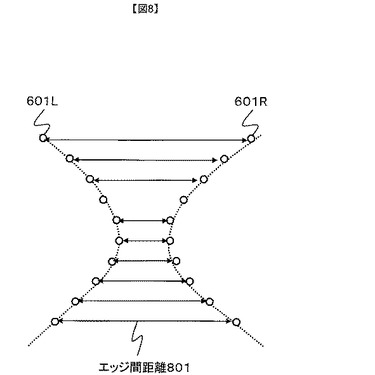
得られたエッジ点列601L、Rを用いてパターンの形状情報を抽出する。形状情報抽出方法の例として、エッジ点列601L、Rの平行性や直線性、曲線近似性の評価を図8から10を用いて説明する。まず、平行性の判定方法を、図8を用いて述べる。平行性とは、左エッジ点列601Lと右エッジ点列601Rが平行か否かを判定した結果である。まず、左エッジ点列601Lと右エッジ点列601Rの上端から下端まで、それぞれエッジ番号を付与し、同一エッジ番号同士のエッジ間距離(801−1〜801−N)を算出する。次に、エッジ間距離801−1〜801−Nの分散を求める。左右エッジ点列601L、Rが平行に近ければ、エッジ間距離の分散は小さくなる。そのため、エッジ間距離の分散は左右エッジ点列601L、Rの平行性を示す指標値となる。そこで、予め平行性の有無を判断する平行しきい値を設定しておき、エッジ間距離の分散が平行しきい値以下の場合に平行性あり、上回る場合には平行性なしと判定する。以下にその算出式を示す。
if(エッジ間距離の分散≦平行しきい値) 平行性あり
else 平行性なし
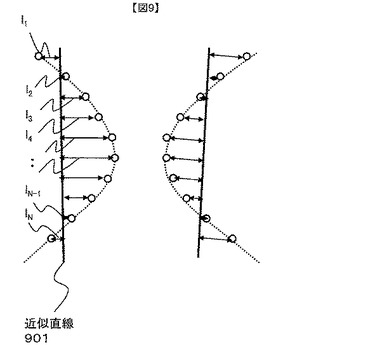
次に、直線性の判定方法を図9を用いて述べる。直線性とは、左右エッジ点列601L、Rそれぞれの直線近似可否の評価結果である。ここでは、左エッジ点列601Lを例に説明するが、右エッジ点列601Rでも同様の処理となる。まず、左エッジ点列601Lに対し、近似直線901をフィッティングする。フィッティング方法としては、エッジ点列601Lと近似直線901の距離を最小とする最小二乗法等の一般に知られている手法を用いる。次に、近似直線901とエッジ点列601L上の平均距離を直線残差として求める。直線残差は近似直線901のエッジ点列601Lに対するフィッティング精度を示す指標値であり、近似直線901エッジ点列601Lの上端のエッジ点から下端のエッジ点までの距離を順にl1、l2、・・・、lNとしたとき、直線残差は以下の式で算出される。
(数2)
【0019】
予め直線性の有無を判断する直線しきい値を設定しておき、直線残差が直線しきい値以下の場合には直線性あり、上回る場合には直線性なしと判定する。以下にその算出式を示す。
if(直線残差≦直線しきい値) 直線性あり
else 直線性なし
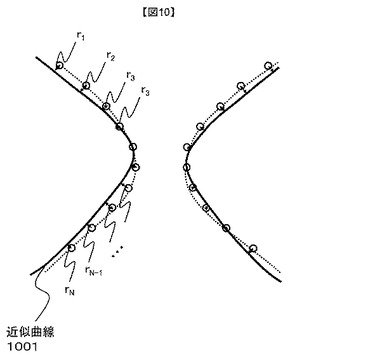
最後に、曲線近似性の判定方法を、図10を用いて述べる。曲線近似性とは、左右エッジ点列601L、Rそれぞれを既知の曲線に近似可能か否かを評価した結果である。この評価も、左エッジ点列601Lを例に説明する。また、既知の曲線にはさまざまな種類が存在するが、ここでは最も一般的な曲線の一つである放物線を用いて説明する。まず、左エッジ点列601Lに対し、近似曲線1001をフィッティングする。次に、近似曲線1001とエッジ点列601Lの平均距離を曲線残差として求める。曲線残差は近似曲線1001のエッジ点列601Lに対するフィッティング精度を示す指標値であり、近似曲線1001とエッジ点列601Lの上端のエッジ点から下端のエッジ点までの距離を順にr1、r2、・・・、rNとしたとき、曲線残差は以下の式で算出される。
(数3)
【0020】
予め曲線近似性の有無を判断する曲線しきい値を設定しておき、曲線残差が曲線しきい値以下の場合には曲線近似性あり、上回る場合には曲線近似性なしと判定する。以下にその算出式を示す。
if(曲線残差<曲線しきい値) 曲線近似性あり
else 曲線近似性なし
ここでは近似曲線として放物線を例に挙げて説明したが、楕円曲線や高次の方程式で示される曲線等、任意の曲線で同様の処理が可能であり、曲線の種類ごとに曲線近似性を評価しても良い。
【0021】
以上が平行性、直線性、曲線近似性の評価方法の例であるが、これらの方法に限らず、別の評価方法を用いてパターン形状情報を抽出してももちろん良い。これらの結果を計測手法選定に用いることで、適用可能な計測手法をより定量的に選定することができる。
【0022】
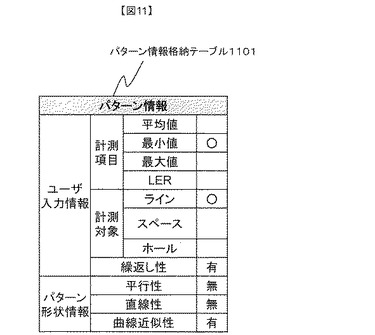
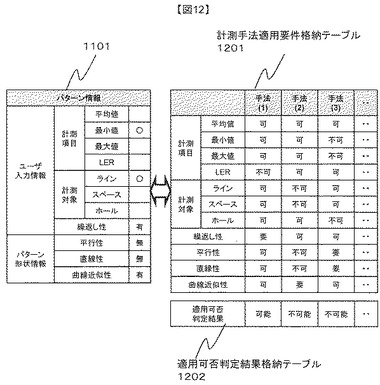
次に、計測手法選定処理であるステップ203について説明する。本ステップでは、ステップ202で取得したパターン情報とデータ記憶装置115に保存されている計測手法ライブラリ内の計測手法適用要件の情報を照合し、パターン情報が計測手法適用要件の情報を満たす計測手法データの計測手法を選定する。まず、ユーザ入力情報取得202−a及びパターン形状情報抽出202−bにより取得したユーザ入力情報とパターン形状情報を、パターン情報としてテーブル化し、メモリ1141に記憶する。図11にパターン情報を格納したパターン情報格納テーブル1101を示す。本実施例では、計測項目や計測対象のような複数の選択肢から選ぶ情報は、選択された情報を「○」、選択されなかった情報を空白で、繰返し性、平行性、直線性、曲線近似性のようなパターン特性の有無を識別する情報は「有」または「無」で表記されるものとする。図11の例では、ユーザ入力情報の計測項目は「最小幅」、計測対象は「ライン」、繰返し性は「有」が選択され、パターン形状情報は、平行性、直線性は「無」、曲線近似性は「有」と判定されたものとする。
【0023】
パターン情報格納テーブル1101が保存されると、データ記憶装置115から計測手法適用要件の情報が格納された計測手法適用要件格納テーブル1201を取り出す。テーブル1201の縦列は、パターン情報格納テーブル1101と同一項目であり、テーブルの内容は各計測手法データに対する各項目の適用可否情報で構成されている。適用可否情報は、適用可能な条件を「可」で、適用不可能な条件を「不可」で、必須条件を「要」で示している。つまり、パターン情報格納テーブル1101内の計測項目や計測対象で選択された項目や、繰返し性、平行性、直線性、曲線近似性のうち「有」が選択された項目が、テーブル1201で「可」又は「要」となっていれば、その項目では適用可能、「不可」となっていれば適用不可能となる。逆に、テーブル1101内の計測項目や計測対象で選択されなかった項目や、繰返し性、平行性、直線性、曲線近似性のうち「無」が選択された項目が、テーブル1201で「可」又は「不可」となっていれば、その項目では適用可能、「要」となっていれば適用不可能となる。よって、実際にはテーブル1201内の「不可」又は「要」となっている項目が適用可否の判定項目となる。
【0024】
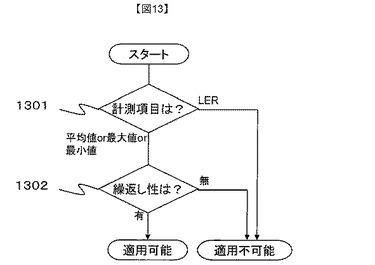
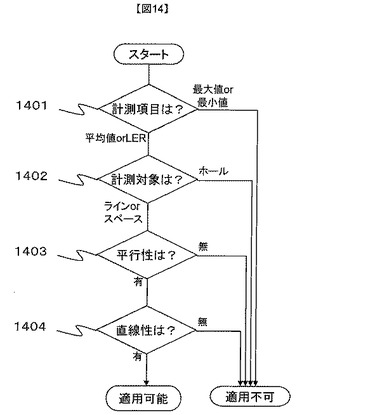
図12に示す計測手法適用要件格納テーブル1201に記載されている手法(1)を例にとり、具体的に説明する。手法(1)では、計測項目は、平均値、最小値、最大値は全て計測可能であるため「可」となり、一方パターンのラフネスを示す指標値であるLER(Line Edge Roughness)は計測不可であるため「不可」となっている。同様に、計測対象はライン、スペース、ホール全てにおいて適用可能であるため「可」に、平行性、直線性、曲線近似性もその有無に関係なく計測可能であるため、「可」になっている。また、繰返し性は、無ければ計測不可となるため「要」となっている。手法(2)以降も同様に手法の計測項目、計測対象、形状に関する情報等に対する適用可否の情報が記憶されている。この計測手法適用要件格納テーブル1201とパターン情報格納テーブル1101の各項目を照合し、計測手法の適用可否を判定する。手法(1)、(3)を例に図13、14のフローチャートを用いて説明する。手法(1)では、計測対象の全パターン、即ちライン、スペース、ホールと、パターン形状情報の平行性、直線性、曲線近似性が「可」となっているため、適用可否の判定項目は計測項目及び繰返し性の有無となる。まず、ステップ1301で、パターン情報格納テーブル1101内の計測項目が「最小幅」となっているためにステップ1302へ進み、ステップ1302では、繰返し性は「有」となっているため、手法(1)は「適用可能」となる。一方、手法(3)では、繰返し性、曲線近似性は「可」となっているため、適用可否の判定項目は計測項目、計測対象、平行性の有無、直線性の有無となる。ここでは、パターン情報格納テーブル1101内の計測項目で「最小値」が選択されているため、ステップ1401で「適用不可」となり、ステップ1402〜1404を通ることなく手法(3)は適用不可能となる。同様にして、各計測手法の適用可否を判定し、適用可否判定結果を格納したテーブル1202を生成する。適用可否判定結果格納テーブル1202が生成されると、テーブル1202内で適用可能となっている1つ以上の計測手法がデータ記憶装置115に記憶されている計測手法ライブラリからメモリ1141に読み出される。以上が計測手法選定処理ステップ203の内容である。
【0025】
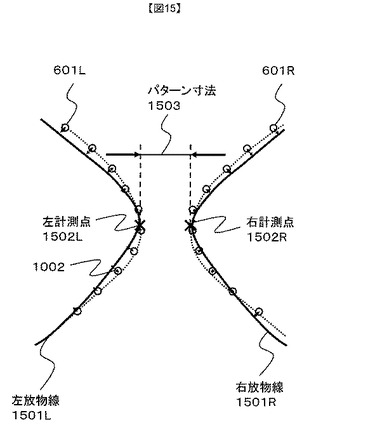
次に、寸法計測ステップ204について説明する。本ステップでは、適応可否判定結果が記憶された適用可否判定結果格納テーブル1202を読み込み、適用可能と判定された各計測手法により計測対象部303の寸法を計測する。ここでは、その一つである放物線近似法により計測した場合の処理内容を例に、図15を用いて説明する。本実施例では、計測対象部303の左右エッジ点列601L、Rそれぞれに、左放物線1501Lと右放物線1501Rを近似的にフィッティングする。次に、左放物線1501L上の右端の座標と右放物線1501R上の左端の座標を左右の計測点1502L、Rとし、両計測点間距離をパターン寸法1503として計測する。また、左右放物線1501L、Rの左右フィッティング精度も算出し、制御端末116に送信する。ここで、フィッティング精度とは左右放物線1501L、Rとエッジ点列601L、Rの曲線残差1002のことである。また、放物線近似法による計測時間や、複数の計測対象部を計測した場合には複数の計測値を用いて再現性等も計算し、計測結果として制御端末116に併せて送信する。ここで、再現性とは、寸法計測を複数回行った場合における寸法値のばらつき等を指すため、例えば複数の計測値の分散を計算することで算出できる。このように、複数回の測定の分散を計算し、記録することで、計測の信頼性を確認することが可能となる。
【0026】
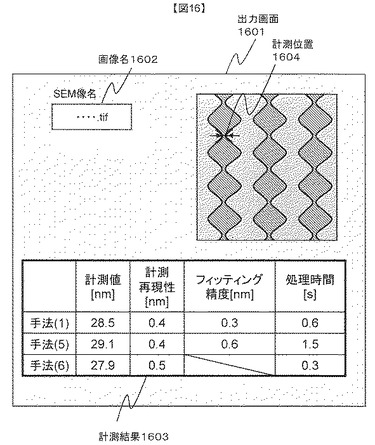
最後に、計測結果出力205では、寸法計測204により得られた計測結果を、制御端末116内のデータ記録装置に保存し、記録装置から読み込み制御端末116のモニタ上に表示する。表示先は紙面やモニタ上だけに限定されることはない。ここではモニタ上に表示されたものとして、出力画面1601の例を図16に示す。出力画面1601上には、撮像画像301の画像名1602の他、計測結果1603に示されるように計測値、計測再現性、計測時間等の各計測手法ごとの計測結果を示す。計測結果1603以外の情報を表示してもよい。計測対象部303上の計測位置1604等が表示される。これにより、ユーザは、この出力画面1601を見て、各計測手法の計測結果を比較し、適切な計測手法を選択できる。
【0027】
以上述べた撮像画像301に対する一連の処理手続きは記録媒体117に格納されており、制御端末116の指示により記録媒体117が読み込まれ、処理が行われる。
【0028】
本発明を用いることにより、ユーザは、多種多様な計測手法からユーザの目的に合った手法を容易に選択することが可能となる。また、本手法はラインやホールのような従来の一般的な形状パターンはもちろん、計測対象パターン302のような複雑な形状のパターンにも適用可能である。各適用可能計測手法の計測値及び計測精度等を出力することで、ユーザによる定量的な計測手法の比較、手法の選定が可能となる。
【実施例2】
【0029】
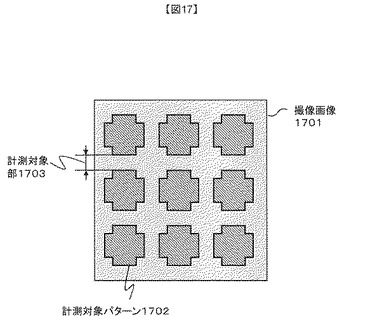
本実施例では、実施例1とは別の形状パターンに対し、本処理を適用した例を述べる。図17に、ステップ201でメモリ1141に読み込まれた撮像画像1701上の計測対象パターン1702を示す。本計測対象パターン1702は、正方形の4つの頂点が内側に90度凹んだ形状となっており、撮像画像1701上に繰返し形成されている。また、本パターンの計測対象部1703は、上下に隣接する2つの計測対象パターン1702のパターン間の距離とする。
【0030】
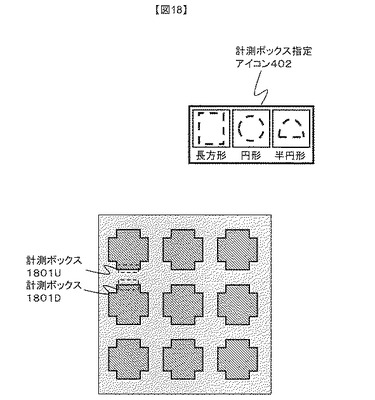
次にユーザ入力ステップ202−aについて述べる。図18は、制御端末116の表示装置上に表示された撮像画像1701と計測ボックスアイコン402から計測ボックス1801を指定した様子を示している。ここでは、計測ボックスアイコン402からは「長方形」を選択したものとし、さらに選択した計測ボックス1801を90度回転して計測対象部1703の上下エッジに個別に設置しており、それぞれ上側エッジ上の計測ボックスを1801U、下側エッジ上の計測ボックスを1801Dとおいている。さらに計測対象部1703は,隣接する2つのパターン1702のパターン間距離であるため、ユーザ入力GUI501では、計測項目502に「平均値」を、計測対象503に「スペース」を、繰返し性504に「有」を選択したものとする。
【0031】
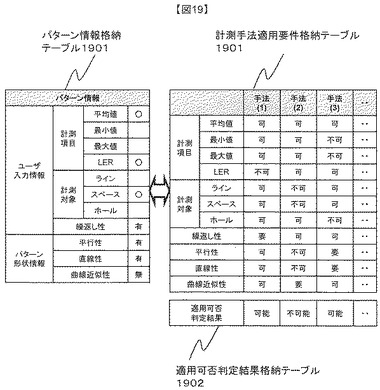
次の形状情報取得ステップ202−bにおける、形状情報抽出方法は実施例1と同様である。その抽出結果として平行性、直線性は「有」、曲線近似性は「無」と判定されたものとし、その結果を202−aで入力したユーザ入力情報と併せてパターン情報格納テーブル1901としてメモリ1141に保存する。
【0032】
さらに、計測手法選定処理であるステップ203について説明する。本ステップでは、実施例1と同様にステップ202で取得したパターン情報格納テーブル内のパターン情報と計測手法適用要件格納テーブル1201内の計測手法適用要件の情報を照合し、計測手法適用要件の情報を満たす計測手法データの計測手法を選定する。実施例1と同様に、計測手法適用要件格納テーブル1201の手法(1)、(3)を例にとり、図13、14を用いて説明する。手法(1)では、ステップ1301で、計測項目が「平均値」となっているためステップ1302に進み、ステップ1302では、繰返し性は「有」となっているため、手法(1)は「適用可能」となる。手法(3)では、ステップ1401で、計測項目が「平均値」となっているためステップ1402に進み、ステップ1402では計測対象が「スペース」となっているため、ステップ1403に進む。1403では、平行性は「有」となっているためステップ1404へ進み、1401で直線性も同様に「有」となっているため「適用可能」と判定される。同様にして、各計測手法の適用可否を判定し、適用可否判定結果格納テーブル1902を生成する。このテーブル1902内で「適用可能」となっている計測手法は、データ記憶装置115に記憶されている計測手法ライブラリからメモリ114に読み出される。
【0033】
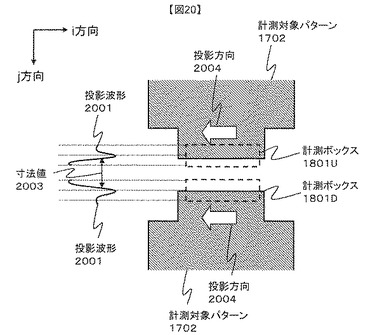
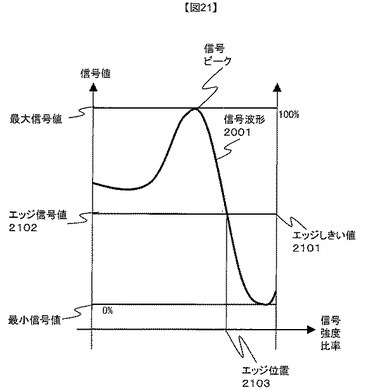
寸法計測ステップ204について説明する。本ステップでは、メモリ114に読み出された計測手法が適用されるが、ここではその1つとして波形投影法を適用したケースを述べる。本手法は,例えば計測ボックス1801U、1801D領域内の信号を特定の方向にそれぞれ投影し、その投影波形2001からエッジ位置を求め、そのエッジ間の距離を計測する手法である。ここで、特定の投影方向は、計測ボックスアイコン402から計測ボックス1801を設置した際に決定されるものとする。即ち、実施例1で述べたように、計測ボックスは回転可能であるため、その回転角度が投影方向に一致させるものとする。例えば回転角度が0度のときはj方向(画像上の上から下方向)に投影され、回転角度が90度のときi方向(画像上の右から左方向)に投影される。ここでは、計測ボックス1801は90度回転して設置されたため、投影方向はi方向となる。また、投影波形2001からエッジを検出する方法としては、例えば実施例1の図7のように、エッジしきい値2101を予め設定し、投影波形2001の最大信号値と最小信号値から(数1)を用いてエッジ信号値2102を求め、2102に一致する座標をエッジ位置2103とする方法が考えられる。ここで、投影波形2001は二つに分かれており、便宜上、投影波形2001の図面の上部の波形を2001U、下部の波形を2001Dと呼ぶ。先に述べたエッジ検出を投影波形2001U、2001Dそれぞれで行い、そのエッジ間の距離を寸法値2003とする。
【0034】
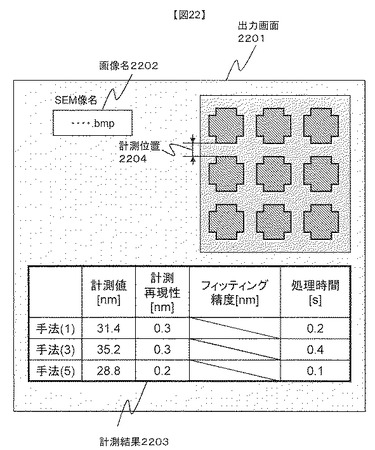
最後に,計測結果出力205で、寸法計測204により得られた計測結果を、制御端末116内のデータ記録装置に保存すると同時に制御端末116のモニタ等に出力する。表示先は、実施例1と同様にモニタ以外でもかまわない。出力画面2201の例を図22に示す。出力画面2201上には、実施例1と同様に、撮像画像1701の画像名2202の他、計測結果2203、計測対象部1703上の計測位置2204等が表示される。これにより、ユーザは、出力画面2201を基に計測対象パターン1702に適用可能な計測手法の計測結果を比較することができ、各ユーザは任意の形状パターンに対して有効な計測手法を選定可能となる。
【0035】
このように、本実施例では実施例1と異なる任意の形状パターンだけでなく、ラインやホールのような従来の一般的な形状パターンに対しても適用可能であり、ユーザは、多種多様な計測手法からユーザの目的に沿った手法を容易に選択することが可能となる。また、各適用可能計測手法の計測値及び計測精度等を出力することで、ユーザによる定量的な計測手法の比較、手法の選定が可能となる。
【符号の説明】
【0036】
10…SEM装置本体、100…電子ビーム、101…ロードロック室、102…ステージ台、103…電子銃、104…コンデンサレンズ、105…対物可動絞り、106…アライメントコイル、107…スティグマコイル、108…偏向コイル、109…対物レンズ、110…ステージコントローラ、111…E×B、112…検出器、113…A/Dコンバータ、114…画像処理部、115…データ記憶装置、116…制御端末、117…記録媒体、201…画像読込ステップ、202…パターン形状取得ステップ、203…計測手法選定処理ステップ、204…寸法計測ステップ、205…計測結果出力ステップ、301…撮像画像、302…計測対象パターン、303…計測対象部、401…計測ボックス、402…計測ボックス指定アイコン、501…ユーザ入力GUI、502…計測項目、503…計測対象、504…繰返し性、601…エッジ点列、701…信号波形、702…エッジしきい値、703…エッジ信号値、704…最大信号値、705…最小信号値、706…エッジ位置、801―1〜801−N…エッジ間距離、901…近似直線、902…直線残差、1001…近似曲線、1002…曲線残差、1101…パターン情報格納テーブル、1201…計測手法適用要件格納テーブル、1202…適用可否判定結果格納テーブル、1501…放物線、1502…計測点、1503…パターン寸法、1601…出力画面、1602…画像名、1603…計測結果、1604…計測位置、1701…撮像画像、1702…計測対象パターン、1703…計測対象部、1801…計測ボックス、1901…パターン情報格納テーブル、1902…適用可否判定結果格納テーブル、2001…投影波形、2101…エッジしきい値、2102…エッジ信号値、2103…エッジ位置、2201…出力画面、2202…画像名、2203…計測結果、2204…計測位置
【技術分野】
【0001】
本発明は、半導体ウェーハ上のパターン寸法を計測する分野において、特に任意のパターン形状に対し、その形状に適した計測手法を選定する方法および装置に関するものである。
【背景技術】
【0002】
半導体パターンの寸法計測では、走査型電子顕微鏡により撮像された高解像度画像を基に、画像上のパターンエッジを検出し、そのエッジ座標から寸法計測を行う。従来の計測対象パターンの形状は基本的にラインやホールに限られていたため、以前から確立されている計測手法を用いることで高い計測再現性を得ることが可能であった。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−302952公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
半導体パターン回路の微細化に伴い、従来のラインやホールとは異なる複雑形状パターンが増加傾向にある。これらのパターンは従来の計測手法では計測精度が低下するケースが多いため、そのパターン形状に応じた計測手法が多数開発されてきた。これらの計測手法は、開発対象としたパターンに類似したパターン形状には適用できるケースが多いが、形状を目視しただけではその適用可否を判断することはできないため、各計測手法の適用可否及びその有効性を検討し、試行錯誤の上適切な計測手法を設定してきた。しかし近年、パターン形状の多様化がますます進行し、より効率的に新規形状パターンに適した計測手法を選定する必要性が高まっている。
【0005】
特許文献1では、走査型電子顕微鏡により撮像された画像データの付帯情報に基づいて判断して計測レシピを選択し、計測処理を行う方法が開示されている。この付帯情報とは取得された画像データとこの画像データのロット情報や計測条件等とされている。計測方法においては、メーカの異なるCDSEMにより画像を取得しても、パターンの計測方法が同一であるとされている。画像上のパターン形状を定量的に捉える方法については記載がない。そのため、選択される計測レシピが必ずしも測定対象のパターン形状に適した手法とは限らない。
【0006】
本発明は、半導体ウェーハ上のパターン寸法を計測する分野において、特に任意のパターン形状に対し、その形状に適した計測手法を選定する方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
本発明は、特に新規パターンの形状に応じた計測手法を効率的に選定することを支援する手法および装置に関するものであり、特に以下の手段により上記課題を解決する。
【0008】
すなわち、本発明では、上記課題を解決するために、電子線により撮像された半導体パターン像の寸法を計測する方法において、ユーザによりパターン上の計測対象部を指定するステップと、パターン計測部から形状情報を抽出するステップと、抽出した形状情報を基に予め作成しておいた計測手法ライブラリから適用可能な計測手法を選定するステップと、選定された手法によりパターンの寸法の計測を行うステップと、計測された寸法を出力するステップを有することを特徴とする半導体パターン寸法の計測方法を提供する。
【発明の効果】
【0009】
本発明によれば、半導体ウェーハ上のパターン寸法を計測における計測手法の選定を行う場合において、効率が向上する。
【図面の簡単な説明】
【0010】
【図1】半導体パターン計測装置の全体構成の例を示す図である。
【図2】本計測処理ステップの一例を示す図である。
【図3】計測対象パターンの撮像画像の一例を示す図である。
【図4】計測ボックス設置後の計測対象パターン画像を示す図である。
【図5】ユーザ入力GUIの一例を示す図である。
【図6】計測対象パターン上のエッジ検出の様子を示す図である。
【図7】パターンエッジ位置を算出する信号波形の一例を示す図である。
【図8】計測対象パターンの左右エッジ点列の平行性を評価する様子を示す図である。
【図9】計測対象パターンの左右エッジ点列の直線性を評価する様子を示す図である。
【図10】計測対象パターンの左右エッジ点列の曲線近似性を評価する様子を示す図である。
【図11】取得したパターン情報の集計結果の一例を示す図である。
【図12】適用可能計測手法の選定処理の一例を示す図である。
【図13】計測手法の適用可否判定フローチャートの一例を示す図である。
【図14】計測手法の適用可否判定フローチャートの一例を示す図である。
【図15】パターン寸法計測の一例を示す図である。
【図16】パターン計測の出力画面の一例を示す図である。
【図17】計測対象パターンの撮像画像の一例を示す図である。
【図18】計測ボックス設置後の計測対象パターン画像を示す図である。
【図19】適用可能計測手法の選定処理の一例を示す図である。
【図20】計測手法の一つである波形投影法を適用したときの様子を示す図である。
【図21】パターンエッジ位置を算出する信号波形の一例を示す図である。
【図22】パターン計測の出力画面の一例を示す図である。
【発明を実施するための形態】
【実施例1】
【0011】
図1に本発明に関わる半導体パターン測定装置の全体構成図を示す。本実施形態である測長SEM10は、計測用ウェーハを設置するサンプルステージ、放出した電子ビーム100を制御する照射光学系、試料上から放出される2次電子を検出する検出系により構成される。サンプルステージは、計測用ウェーハを搬送するロードロック室101と搬送されたウェーハを固定するステージ台102により構成される。照射光学系は、電子銃103および電子ビーム100の経路上にあるコンデンサレンズ104、対物可動絞り105、アライメントコイル106、スティグマコイル107、偏向コイル108、対物レンズ109により構成される。放出した電子ビーム100は、コンデンサレンズ104を経てアライメントコイル106、スティグマコイル107により電子ビーム100の照射位置ずれ、非点収差を補正され、偏向コイル108によりサンプル上の照射位置を制御され、対物レンズ109により集光されて102上のサンプルウェーハに照射される。また、ステージコントローラ110はステージ台102上のウェーハへの電子ビーム100照射位置を制御している。検出系は、E×B111、検出器112により構成される。E×B111では、電子ビーム100の照射によりサンプル内から発生した2次電子に電界および磁界をかけることで、2次電子を検出器112の方向に誘導する。曲げられた2次電子を検出器112により検出する。検出された2次電子はA/Dコンバータ113によりデジタル信号に変換され、画像処理部114内のメモリ1141に画像として格納される。画像処理部114では、メモリ1141内に格納された画像及び制御端末116より入力された情報を用いてデータ記憶装置115に記憶されている計測手法ライブラリから計測手法データを取出し、パターン寸法計測等を行なう。あらかじめ計測手法ライブラリ内に、計測手法データを一つ以上ライブラリ化して記憶しておく。また、計測手法ライブラリには、計測を実行するための計測プログラムが記録されており、計測手法と対応している。ここで、計測プログラムとは、計測手法による計測を実行するために計測手順を記録したものであり、計測手法と同義である。ここで、計測手法データとは、計測手法とその計測手法が適用可能なパターンの条件を示す計測手法適用要件の情報により構成されている。計測手法適用情報の一例は、図に12の計測手法適用要件格納テーブル1201に示す。画像処理部114の詳細については後述する。116はマウスやキーボード等の入力装置やモニタ等の表示装置を有する装置全体の制御端末を示しており、測長SEM10全体を制御し、電子ビーム100の照射条件の調整やウェーハ上への照射位置等を統括し、かつ画像処理部114の処理方法の制御および処理画像の出力を行うことができる。なお、画像処理部114での処理は、予め設定された画像処理プログラムを有する記録媒体117に記録されているプログラムに従って制御される。
【0012】
図2に、本実施例による計測処理フローの一例を示す。本処理は、画像処理部114、データ記憶装置115、制御端末116を用いて行われる。画像処理部114はメモリ1141及びCPU1142により構成されており、制御端末116により制御される。まず、ステップ201では、CPU1142により1枚または複数枚の画像をメモリ1141に読み込む。次に、ステップ202では、制御端末116により入力されたユーザ入力情報及びCPU1142により読み込んだ画像のパターン形状抽出によりパターン情報を作成し、メモリ1141に保存する。ここで、パターン情報とは、ユーザ入力情報とパターン形状情報とから構成され、例として図12のパターン情報1101に示す。ステップ203では、データ記憶装置115に格納してある計測手法適用要件の情報をメモリ1141に読み込み、CPU1142によりパターン情報と計測手法適用要件の情報を照合し、計測手法の適用可否の判定結果をメモリ1141に保存する。判定結果の一例を、図12の適用可否判定結果格納テーブル1202に示す。さらに、ステップ204では、適用可能と判定された計測手法をライブラリ115からメモリ1141に読み込み、CPU1142により寸法の計測を行う。最後に、ステップ205では、得られた結果を制御端末116に送信し、計測結果を出力する。以下、各ステップの具体的内容を詳述する。
【0013】
まず、ステップ201で読み込まれる撮像画像の例を301に示す。撮像画像301上には、図3に示すような左右エッジが周期的に蛇行しているラインパターンが撮像されており、本パターンを計測対象パターン302とする。ここでは、計測対象パターン302の局所的に狭くなっている部分のライン幅を計測対象部303とする。
【0014】
次に、ユーザ入力情報を入力するユーザ入力ステップ202−aについて説明する。ユーザ入力情報とは、ユーザの指示に基づく情報で、画像処理により得ることが困難又は不可能なものを含む情報であり、例えば画像内の計測対象部303の位置や計測値が平均値か或いは最小値かなどが挙げられる。ここでは、ユーザ入力情報の例として撮像画像301上の計測位置と計測範囲、計測項目、計測対象、繰返し性を述べるが、ユーザ入力情報はその限りではなく、また、これらの項目が必ず入力されなければならない訳でもない。図4は制御端末116の表示装置に表示された撮像画像301であり、計測ボックス401を指定した様子を示している。計測ボックス401とは、計測対象部303を包含する計測領域であり、その位置や範囲は、制御端末116の表示装置上に示された撮像画像301内の位置をマウス等の入力装置により指示することで指定する。また、ここでは計測ボックス401の形状を長方形としているが、円形状や半円状など、計測対象パターン302の形状に応じ、例えば図4の402に示すアイコンで指示することにより、計測ボックス401の形状を選択することもできる。さらに、ここでは、図4に示すように計測ボックス401を左右エッジ別に設置するものとし、便宜上、左側に設置したものを401L、右側に設置したものを401Rと呼ぶが、合体させて1つの計測ボックス401として設置しても良い。また、計測ボックス401は回転させて設置することもできるものとし、例えば90度回転させて設置した場合、計測ボックス401L、Rは上下に配置される。これは、計測対象部が上下エッジ間の距離である場合等に用いる。
【0015】
図5は、制御端末116の表示装置上に表示させるユーザ入力情報を入力するGUI501の例である。計測項目502ではパターンの寸法のみでなく、LER(Line Edge Roughness)等のラフネス等も指定できる。また、計測対象503とは、計測対象部303の形状の種類を指定する項目である。ここで、入力されるパターンの形状は多種多様であるが、どのような形状であっても計測対象部303は大別するとパターンの幅かギャップか径のいずれかになり、それぞれ適用可能な計測手法が異なる。そこで、パターン幅の場合はラインを、ギャップの場合はスペースを、径の場合はホールを指定するものとする。ここではGUI501上で指定するものとしたが、計測ボックス形状指定アイコン402等により計測ボックス401の形状を指示することで、自動的に計測対象503を指定するものとしてもよい。さらに、繰返し性504は、同一画像内のパターンの繰返し性の有無を指定するものである。ここでは、計測対象部303はライン上の局所的に狭くなっている部分のライン幅であるため、計測項目502は最小幅を、計測対象503はラインを指定し、この局所的に狭い箇所は画像301上で繰返し出現しているため、繰返し性504は「あり」が選択された状態を示している。
【0016】
次に、形状情報取得ステップ202−bについて述べる。形状情報とは、撮像画像301から抽出できるパターン計測対象部の形を定量的に評価した情報であり、例えば計測対象部が直線か否かといったことが挙げられる。抽出は自動で行ってもよい。ここでは、抽出方法の例としてパターンエッジを用いた方法を述べる。図6に示すように、計測ボックス401L、R内のパターン形状情報を抽出する。ここでは、計測ボックス401Lを用いて説明し、便宜上、撮像画像301の水平方向をi方向、垂直方向をj方向とする。まず、計測ボックス401L内のj方向のある座標j0で、図7に示すi方向の信号波形701を取得する。取得範囲は、計測ボックス401Lの左端から右端までとする。図7において、パターン上のエッジ付近では画素値が高くなるため、信号波形701はエッジ付近で信号ピークが発生した形状となる。次に、事前に指定しておいたエッジしきい値702により、エッジ信号値703を算出する。エッジしきい値702はユーザにより任意に指定できるパラメータであり、信号波形701上の最大信号値704を100%、最小信号値705を0%としたときの信号強度比率を表す。このエッジしきい値702はどのタイミングで指定してもかまわないが、ここではユーザ入力ステップ202−aでユーザ入力情報と一緒に入力したものとする。以下にエッジ信号値703を求める算出式を示す。
(数1)
【0017】
最後に信号波形701上からエッジ信号値703と一致する座標をエッジ位置706として検出する。本処理を、計測ボックス401L内のj方向の各座標で行い、計測ボックス401内のエッジ点列601Lを算出する。本例では、パターン形状によって信号波形701の取得方向をi方向としたが、計測対象部303の形状に応じて取得方向をユーザが変更しても良い。本処理を左右両計測ボックス401L、Rで個別に行い、エッジ点列601L、Rを検出する。ここで、両計測ボックス401L、R内の検出したエッジ点数は同一とし、その点数はN点としておく。
【0018】
得られたエッジ点列601L、Rを用いてパターンの形状情報を抽出する。形状情報抽出方法の例として、エッジ点列601L、Rの平行性や直線性、曲線近似性の評価を図8から10を用いて説明する。まず、平行性の判定方法を、図8を用いて述べる。平行性とは、左エッジ点列601Lと右エッジ点列601Rが平行か否かを判定した結果である。まず、左エッジ点列601Lと右エッジ点列601Rの上端から下端まで、それぞれエッジ番号を付与し、同一エッジ番号同士のエッジ間距離(801−1〜801−N)を算出する。次に、エッジ間距離801−1〜801−Nの分散を求める。左右エッジ点列601L、Rが平行に近ければ、エッジ間距離の分散は小さくなる。そのため、エッジ間距離の分散は左右エッジ点列601L、Rの平行性を示す指標値となる。そこで、予め平行性の有無を判断する平行しきい値を設定しておき、エッジ間距離の分散が平行しきい値以下の場合に平行性あり、上回る場合には平行性なしと判定する。以下にその算出式を示す。
if(エッジ間距離の分散≦平行しきい値) 平行性あり
else 平行性なし
次に、直線性の判定方法を図9を用いて述べる。直線性とは、左右エッジ点列601L、Rそれぞれの直線近似可否の評価結果である。ここでは、左エッジ点列601Lを例に説明するが、右エッジ点列601Rでも同様の処理となる。まず、左エッジ点列601Lに対し、近似直線901をフィッティングする。フィッティング方法としては、エッジ点列601Lと近似直線901の距離を最小とする最小二乗法等の一般に知られている手法を用いる。次に、近似直線901とエッジ点列601L上の平均距離を直線残差として求める。直線残差は近似直線901のエッジ点列601Lに対するフィッティング精度を示す指標値であり、近似直線901エッジ点列601Lの上端のエッジ点から下端のエッジ点までの距離を順にl1、l2、・・・、lNとしたとき、直線残差は以下の式で算出される。
(数2)
【0019】
予め直線性の有無を判断する直線しきい値を設定しておき、直線残差が直線しきい値以下の場合には直線性あり、上回る場合には直線性なしと判定する。以下にその算出式を示す。
if(直線残差≦直線しきい値) 直線性あり
else 直線性なし
最後に、曲線近似性の判定方法を、図10を用いて述べる。曲線近似性とは、左右エッジ点列601L、Rそれぞれを既知の曲線に近似可能か否かを評価した結果である。この評価も、左エッジ点列601Lを例に説明する。また、既知の曲線にはさまざまな種類が存在するが、ここでは最も一般的な曲線の一つである放物線を用いて説明する。まず、左エッジ点列601Lに対し、近似曲線1001をフィッティングする。次に、近似曲線1001とエッジ点列601Lの平均距離を曲線残差として求める。曲線残差は近似曲線1001のエッジ点列601Lに対するフィッティング精度を示す指標値であり、近似曲線1001とエッジ点列601Lの上端のエッジ点から下端のエッジ点までの距離を順にr1、r2、・・・、rNとしたとき、曲線残差は以下の式で算出される。
(数3)
【0020】
予め曲線近似性の有無を判断する曲線しきい値を設定しておき、曲線残差が曲線しきい値以下の場合には曲線近似性あり、上回る場合には曲線近似性なしと判定する。以下にその算出式を示す。
if(曲線残差<曲線しきい値) 曲線近似性あり
else 曲線近似性なし
ここでは近似曲線として放物線を例に挙げて説明したが、楕円曲線や高次の方程式で示される曲線等、任意の曲線で同様の処理が可能であり、曲線の種類ごとに曲線近似性を評価しても良い。
【0021】
以上が平行性、直線性、曲線近似性の評価方法の例であるが、これらの方法に限らず、別の評価方法を用いてパターン形状情報を抽出してももちろん良い。これらの結果を計測手法選定に用いることで、適用可能な計測手法をより定量的に選定することができる。
【0022】
次に、計測手法選定処理であるステップ203について説明する。本ステップでは、ステップ202で取得したパターン情報とデータ記憶装置115に保存されている計測手法ライブラリ内の計測手法適用要件の情報を照合し、パターン情報が計測手法適用要件の情報を満たす計測手法データの計測手法を選定する。まず、ユーザ入力情報取得202−a及びパターン形状情報抽出202−bにより取得したユーザ入力情報とパターン形状情報を、パターン情報としてテーブル化し、メモリ1141に記憶する。図11にパターン情報を格納したパターン情報格納テーブル1101を示す。本実施例では、計測項目や計測対象のような複数の選択肢から選ぶ情報は、選択された情報を「○」、選択されなかった情報を空白で、繰返し性、平行性、直線性、曲線近似性のようなパターン特性の有無を識別する情報は「有」または「無」で表記されるものとする。図11の例では、ユーザ入力情報の計測項目は「最小幅」、計測対象は「ライン」、繰返し性は「有」が選択され、パターン形状情報は、平行性、直線性は「無」、曲線近似性は「有」と判定されたものとする。
【0023】
パターン情報格納テーブル1101が保存されると、データ記憶装置115から計測手法適用要件の情報が格納された計測手法適用要件格納テーブル1201を取り出す。テーブル1201の縦列は、パターン情報格納テーブル1101と同一項目であり、テーブルの内容は各計測手法データに対する各項目の適用可否情報で構成されている。適用可否情報は、適用可能な条件を「可」で、適用不可能な条件を「不可」で、必須条件を「要」で示している。つまり、パターン情報格納テーブル1101内の計測項目や計測対象で選択された項目や、繰返し性、平行性、直線性、曲線近似性のうち「有」が選択された項目が、テーブル1201で「可」又は「要」となっていれば、その項目では適用可能、「不可」となっていれば適用不可能となる。逆に、テーブル1101内の計測項目や計測対象で選択されなかった項目や、繰返し性、平行性、直線性、曲線近似性のうち「無」が選択された項目が、テーブル1201で「可」又は「不可」となっていれば、その項目では適用可能、「要」となっていれば適用不可能となる。よって、実際にはテーブル1201内の「不可」又は「要」となっている項目が適用可否の判定項目となる。
【0024】
図12に示す計測手法適用要件格納テーブル1201に記載されている手法(1)を例にとり、具体的に説明する。手法(1)では、計測項目は、平均値、最小値、最大値は全て計測可能であるため「可」となり、一方パターンのラフネスを示す指標値であるLER(Line Edge Roughness)は計測不可であるため「不可」となっている。同様に、計測対象はライン、スペース、ホール全てにおいて適用可能であるため「可」に、平行性、直線性、曲線近似性もその有無に関係なく計測可能であるため、「可」になっている。また、繰返し性は、無ければ計測不可となるため「要」となっている。手法(2)以降も同様に手法の計測項目、計測対象、形状に関する情報等に対する適用可否の情報が記憶されている。この計測手法適用要件格納テーブル1201とパターン情報格納テーブル1101の各項目を照合し、計測手法の適用可否を判定する。手法(1)、(3)を例に図13、14のフローチャートを用いて説明する。手法(1)では、計測対象の全パターン、即ちライン、スペース、ホールと、パターン形状情報の平行性、直線性、曲線近似性が「可」となっているため、適用可否の判定項目は計測項目及び繰返し性の有無となる。まず、ステップ1301で、パターン情報格納テーブル1101内の計測項目が「最小幅」となっているためにステップ1302へ進み、ステップ1302では、繰返し性は「有」となっているため、手法(1)は「適用可能」となる。一方、手法(3)では、繰返し性、曲線近似性は「可」となっているため、適用可否の判定項目は計測項目、計測対象、平行性の有無、直線性の有無となる。ここでは、パターン情報格納テーブル1101内の計測項目で「最小値」が選択されているため、ステップ1401で「適用不可」となり、ステップ1402〜1404を通ることなく手法(3)は適用不可能となる。同様にして、各計測手法の適用可否を判定し、適用可否判定結果を格納したテーブル1202を生成する。適用可否判定結果格納テーブル1202が生成されると、テーブル1202内で適用可能となっている1つ以上の計測手法がデータ記憶装置115に記憶されている計測手法ライブラリからメモリ1141に読み出される。以上が計測手法選定処理ステップ203の内容である。
【0025】
次に、寸法計測ステップ204について説明する。本ステップでは、適応可否判定結果が記憶された適用可否判定結果格納テーブル1202を読み込み、適用可能と判定された各計測手法により計測対象部303の寸法を計測する。ここでは、その一つである放物線近似法により計測した場合の処理内容を例に、図15を用いて説明する。本実施例では、計測対象部303の左右エッジ点列601L、Rそれぞれに、左放物線1501Lと右放物線1501Rを近似的にフィッティングする。次に、左放物線1501L上の右端の座標と右放物線1501R上の左端の座標を左右の計測点1502L、Rとし、両計測点間距離をパターン寸法1503として計測する。また、左右放物線1501L、Rの左右フィッティング精度も算出し、制御端末116に送信する。ここで、フィッティング精度とは左右放物線1501L、Rとエッジ点列601L、Rの曲線残差1002のことである。また、放物線近似法による計測時間や、複数の計測対象部を計測した場合には複数の計測値を用いて再現性等も計算し、計測結果として制御端末116に併せて送信する。ここで、再現性とは、寸法計測を複数回行った場合における寸法値のばらつき等を指すため、例えば複数の計測値の分散を計算することで算出できる。このように、複数回の測定の分散を計算し、記録することで、計測の信頼性を確認することが可能となる。
【0026】
最後に、計測結果出力205では、寸法計測204により得られた計測結果を、制御端末116内のデータ記録装置に保存し、記録装置から読み込み制御端末116のモニタ上に表示する。表示先は紙面やモニタ上だけに限定されることはない。ここではモニタ上に表示されたものとして、出力画面1601の例を図16に示す。出力画面1601上には、撮像画像301の画像名1602の他、計測結果1603に示されるように計測値、計測再現性、計測時間等の各計測手法ごとの計測結果を示す。計測結果1603以外の情報を表示してもよい。計測対象部303上の計測位置1604等が表示される。これにより、ユーザは、この出力画面1601を見て、各計測手法の計測結果を比較し、適切な計測手法を選択できる。
【0027】
以上述べた撮像画像301に対する一連の処理手続きは記録媒体117に格納されており、制御端末116の指示により記録媒体117が読み込まれ、処理が行われる。
【0028】
本発明を用いることにより、ユーザは、多種多様な計測手法からユーザの目的に合った手法を容易に選択することが可能となる。また、本手法はラインやホールのような従来の一般的な形状パターンはもちろん、計測対象パターン302のような複雑な形状のパターンにも適用可能である。各適用可能計測手法の計測値及び計測精度等を出力することで、ユーザによる定量的な計測手法の比較、手法の選定が可能となる。
【実施例2】
【0029】
本実施例では、実施例1とは別の形状パターンに対し、本処理を適用した例を述べる。図17に、ステップ201でメモリ1141に読み込まれた撮像画像1701上の計測対象パターン1702を示す。本計測対象パターン1702は、正方形の4つの頂点が内側に90度凹んだ形状となっており、撮像画像1701上に繰返し形成されている。また、本パターンの計測対象部1703は、上下に隣接する2つの計測対象パターン1702のパターン間の距離とする。
【0030】
次にユーザ入力ステップ202−aについて述べる。図18は、制御端末116の表示装置上に表示された撮像画像1701と計測ボックスアイコン402から計測ボックス1801を指定した様子を示している。ここでは、計測ボックスアイコン402からは「長方形」を選択したものとし、さらに選択した計測ボックス1801を90度回転して計測対象部1703の上下エッジに個別に設置しており、それぞれ上側エッジ上の計測ボックスを1801U、下側エッジ上の計測ボックスを1801Dとおいている。さらに計測対象部1703は,隣接する2つのパターン1702のパターン間距離であるため、ユーザ入力GUI501では、計測項目502に「平均値」を、計測対象503に「スペース」を、繰返し性504に「有」を選択したものとする。
【0031】
次の形状情報取得ステップ202−bにおける、形状情報抽出方法は実施例1と同様である。その抽出結果として平行性、直線性は「有」、曲線近似性は「無」と判定されたものとし、その結果を202−aで入力したユーザ入力情報と併せてパターン情報格納テーブル1901としてメモリ1141に保存する。
【0032】
さらに、計測手法選定処理であるステップ203について説明する。本ステップでは、実施例1と同様にステップ202で取得したパターン情報格納テーブル内のパターン情報と計測手法適用要件格納テーブル1201内の計測手法適用要件の情報を照合し、計測手法適用要件の情報を満たす計測手法データの計測手法を選定する。実施例1と同様に、計測手法適用要件格納テーブル1201の手法(1)、(3)を例にとり、図13、14を用いて説明する。手法(1)では、ステップ1301で、計測項目が「平均値」となっているためステップ1302に進み、ステップ1302では、繰返し性は「有」となっているため、手法(1)は「適用可能」となる。手法(3)では、ステップ1401で、計測項目が「平均値」となっているためステップ1402に進み、ステップ1402では計測対象が「スペース」となっているため、ステップ1403に進む。1403では、平行性は「有」となっているためステップ1404へ進み、1401で直線性も同様に「有」となっているため「適用可能」と判定される。同様にして、各計測手法の適用可否を判定し、適用可否判定結果格納テーブル1902を生成する。このテーブル1902内で「適用可能」となっている計測手法は、データ記憶装置115に記憶されている計測手法ライブラリからメモリ114に読み出される。
【0033】
寸法計測ステップ204について説明する。本ステップでは、メモリ114に読み出された計測手法が適用されるが、ここではその1つとして波形投影法を適用したケースを述べる。本手法は,例えば計測ボックス1801U、1801D領域内の信号を特定の方向にそれぞれ投影し、その投影波形2001からエッジ位置を求め、そのエッジ間の距離を計測する手法である。ここで、特定の投影方向は、計測ボックスアイコン402から計測ボックス1801を設置した際に決定されるものとする。即ち、実施例1で述べたように、計測ボックスは回転可能であるため、その回転角度が投影方向に一致させるものとする。例えば回転角度が0度のときはj方向(画像上の上から下方向)に投影され、回転角度が90度のときi方向(画像上の右から左方向)に投影される。ここでは、計測ボックス1801は90度回転して設置されたため、投影方向はi方向となる。また、投影波形2001からエッジを検出する方法としては、例えば実施例1の図7のように、エッジしきい値2101を予め設定し、投影波形2001の最大信号値と最小信号値から(数1)を用いてエッジ信号値2102を求め、2102に一致する座標をエッジ位置2103とする方法が考えられる。ここで、投影波形2001は二つに分かれており、便宜上、投影波形2001の図面の上部の波形を2001U、下部の波形を2001Dと呼ぶ。先に述べたエッジ検出を投影波形2001U、2001Dそれぞれで行い、そのエッジ間の距離を寸法値2003とする。
【0034】
最後に,計測結果出力205で、寸法計測204により得られた計測結果を、制御端末116内のデータ記録装置に保存すると同時に制御端末116のモニタ等に出力する。表示先は、実施例1と同様にモニタ以外でもかまわない。出力画面2201の例を図22に示す。出力画面2201上には、実施例1と同様に、撮像画像1701の画像名2202の他、計測結果2203、計測対象部1703上の計測位置2204等が表示される。これにより、ユーザは、出力画面2201を基に計測対象パターン1702に適用可能な計測手法の計測結果を比較することができ、各ユーザは任意の形状パターンに対して有効な計測手法を選定可能となる。
【0035】
このように、本実施例では実施例1と異なる任意の形状パターンだけでなく、ラインやホールのような従来の一般的な形状パターンに対しても適用可能であり、ユーザは、多種多様な計測手法からユーザの目的に沿った手法を容易に選択することが可能となる。また、各適用可能計測手法の計測値及び計測精度等を出力することで、ユーザによる定量的な計測手法の比較、手法の選定が可能となる。
【符号の説明】
【0036】
10…SEM装置本体、100…電子ビーム、101…ロードロック室、102…ステージ台、103…電子銃、104…コンデンサレンズ、105…対物可動絞り、106…アライメントコイル、107…スティグマコイル、108…偏向コイル、109…対物レンズ、110…ステージコントローラ、111…E×B、112…検出器、113…A/Dコンバータ、114…画像処理部、115…データ記憶装置、116…制御端末、117…記録媒体、201…画像読込ステップ、202…パターン形状取得ステップ、203…計測手法選定処理ステップ、204…寸法計測ステップ、205…計測結果出力ステップ、301…撮像画像、302…計測対象パターン、303…計測対象部、401…計測ボックス、402…計測ボックス指定アイコン、501…ユーザ入力GUI、502…計測項目、503…計測対象、504…繰返し性、601…エッジ点列、701…信号波形、702…エッジしきい値、703…エッジ信号値、704…最大信号値、705…最小信号値、706…エッジ位置、801―1〜801−N…エッジ間距離、901…近似直線、902…直線残差、1001…近似曲線、1002…曲線残差、1101…パターン情報格納テーブル、1201…計測手法適用要件格納テーブル、1202…適用可否判定結果格納テーブル、1501…放物線、1502…計測点、1503…パターン寸法、1601…出力画面、1602…画像名、1603…計測結果、1604…計測位置、1701…撮像画像、1702…計測対象パターン、1703…計測対象部、1801…計測ボックス、1901…パターン情報格納テーブル、1902…適用可否判定結果格納テーブル、2001…投影波形、2101…エッジしきい値、2102…エッジ信号値、2103…エッジ位置、2201…出力画面、2202…画像名、2203…計測結果、2204…計測位置
【特許請求の範囲】
【請求項1】
電子線により撮像された半導体パターンの画像を計測する方法であって,
予め複数の計測手法を記憶した計測手法ライブラリを有しており、
撮像された半導体パターンの画像から計測対象部を指定するステップと、
指定された前記計測対象部の形状情報を抽出するステップと、
前記形状情報を用いて前記計測対象部を計測する前記計測手法を前記計測手法ライブラリ
から選定するステップと、
選定された前記計測手法を用いて計測対象部の寸法の計測を行うステップと、
計測された前記寸法を出力するステップと、
を有することを特徴とする半導体パターン計測方法。
【請求項2】
請求項1記載の半導体パターン計測方法であって、
前記計測手法ライブラリは、前記計測手法と、計測手法適用要件とを計測手法データとし
て記憶していること
を特徴とする半導体パターン計測方法。
【請求項3】
請求項1記載の半導体パターン計測方法であって、
前記計測対象部を指定するステップにおいて指定された前記計測対象部のユーザ入力情報
を入力するステップ、
を有することを特徴とする半導体パターン計測方法。
【請求項4】
請求項3記載の半導体パターン計測方法であって、
前記計測手法を選定するステップは、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部を
計測する前記計測手法を前記計測手法ライブラリから選定することを特徴とする半導体パ
ターン計測方法。
【請求項5】
請求項2記載の半導体パターン計測方法であって、
前記計測対象部を指定するステップにおいて指定された前記計測対象部のユーザ入力情報
を入力するステップと、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部の
パターン情報を作成するステップと、
を有することを特徴とする半導体パターン計測方法。
【請求項6】
請求項5記載の半導体パターン計測方法であって、
前記計測手法を選定するステップは、
前記計測手法データと前記パターン情報とを比較し、前記計測対象部を計測する前記計測手法
を前記計測手法ライブラリから選定することを特徴とする半導体パターン計測方法。
【請求項7】
請求項3記載の半導体パターン計測方法であって、
前記ユーザ入力情報は、計測位置の情報と、計測範囲の情報と、計測項目の情報と、計測
対象の情報と、抽出された前記形状情報のいずれかひとつ以上から構成されることを特徴
とする半導体パターン計測方法。
【請求項8】
請求項7記載の半導体パターン計測方法であって、
前記計測項目の情報は、平均値と,最大値と,最小値のいずれかひとつ以上から構成され
ることを特徴とする半導体パターン計測方法。
【請求項9】
請求項7記載の半導体パターン計測方法であって、
前記計測対象の情報は、ライン、スペース、ホールのいずれかひとつ以上から構成される
ことを特徴とする半導体パターン計測方法。
【請求項10】
請求項7記載の半導体パターン計測方法であって、
前記形状情報は、パターンの平行性と、直線性と、曲線近似性のいずれかひとつ以上から
構成されることを特徴とする半導体パターン計測方法。
【請求項11】
請求項1記載の半導体パターン計測方法であって、
前記寸法の計測を行うステップにおいて、
選定された前記計測手法を用いて計測対象部の寸法の計測と、前記寸法の計測から計測再
現性を求めることを特徴とする半導体パターン計測方法。
【請求項12】
請求項11記載の半導体パターン計測方法であって、
前記寸法を出力するステップにおいて、
計測された前記寸法と、求められた前記計測再現性とを出力することを特徴とする半導体
パターン計測方法。
【請求項13】
請求項1記載の半導体パターン計測方法であって、
前記抽出するステップにおいて抽出された前記形状情報を用いて、指定された前記計測対
象部のエッジを検出し、検出された前記エッジのエッジ点列を求め,前記エッジ点列を基
に抽出するエッジ点列抽出ステップを有することを特徴とする半導体パターン計測方法。
【請求項14】
ウェーハ上に形成された半導体パターンを計測する半導体パターン計測装置であって、
予め作成しておいた複数のパターン計測手法を有する計測手法ライブラリを記憶する計測
手法記憶手段と、
電子線により半導体パターンの画像を取得する撮像画像取得手段と、
半導体パターンの画像から計測対象部を指定される手段と、
指定された前記計測対象部の形状情報を抽出する手段と、
抽出された前記形状情報を用いて前記計測手法記憶手段に記憶された計測手法ライブラリ
から前記計測対象部を計測する計測手法を選定する手段と、
選定された前記計測手法を用いて、前記計測対象部の寸法の計測を行う手段と、
計測された前記寸法を出力する手段と、
を有することを特徴とする半導体パターン計測装置。
【請求項15】
請求項14記載の半導体パターン計測装置であって、
前記記憶手段は、前記計測手法と計測手法適用要件とを計測手法データとして記憶すること
を特徴とする半導体パターン計測装置。
【請求項16】
請求項14記載の半導体パターン計測装置であって、
前記計測対象部を指定される手段において指定された前記計測対象部のユーザ入力情報を
入力される手段と、
を有することを特徴とする半導体パターン計測装置。
【請求項17】
請求項16記載の半導体パターン計測装置であって、
計測対象部を計測する計測手法を選定する手段において、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部を
計測する前記計測手法を前記計測手法ライブラリから選定することを特徴とする半導体パ
ターン計測装置。
【請求項18】
請求項15記載の半導体パターン計測装置であって、
前記計測対象部を指定される手段において指定された前記計測対象部のユーザ入力情報を
入力される手段と、
前記形状情報を抽出する手段は、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部の
パターン情報を作成することを特徴とする半導体パターン計測装置。
【請求項19】
請求項18記載の半導体パターン計測装置であって、
前記計測対象部を計測する計測手法を選定する手段において、
前記計測手法データと前記パターン情報とを比較し、前記計測手法ライブラリから前記計
測対象部を計測する前記計測手法を選定することを特徴とする半導体パターン計測装置。
【請求項20】
請求項14記載の半導体パターンの計測装置であって、
前記指定された計測対象部の形状情報を抽出する手段において抽出された前記形状情報を
用いて、指定された前記計測対象部のエッジを検出し、検出された前記エッジのエッジ点
列を求め,前記エッジ点列を基に抽出するエッジ点列抽出手段を有することを特徴とする
半導体パターン計測装置。
【請求項1】
電子線により撮像された半導体パターンの画像を計測する方法であって,
予め複数の計測手法を記憶した計測手法ライブラリを有しており、
撮像された半導体パターンの画像から計測対象部を指定するステップと、
指定された前記計測対象部の形状情報を抽出するステップと、
前記形状情報を用いて前記計測対象部を計測する前記計測手法を前記計測手法ライブラリ
から選定するステップと、
選定された前記計測手法を用いて計測対象部の寸法の計測を行うステップと、
計測された前記寸法を出力するステップと、
を有することを特徴とする半導体パターン計測方法。
【請求項2】
請求項1記載の半導体パターン計測方法であって、
前記計測手法ライブラリは、前記計測手法と、計測手法適用要件とを計測手法データとし
て記憶していること
を特徴とする半導体パターン計測方法。
【請求項3】
請求項1記載の半導体パターン計測方法であって、
前記計測対象部を指定するステップにおいて指定された前記計測対象部のユーザ入力情報
を入力するステップ、
を有することを特徴とする半導体パターン計測方法。
【請求項4】
請求項3記載の半導体パターン計測方法であって、
前記計測手法を選定するステップは、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部を
計測する前記計測手法を前記計測手法ライブラリから選定することを特徴とする半導体パ
ターン計測方法。
【請求項5】
請求項2記載の半導体パターン計測方法であって、
前記計測対象部を指定するステップにおいて指定された前記計測対象部のユーザ入力情報
を入力するステップと、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部の
パターン情報を作成するステップと、
を有することを特徴とする半導体パターン計測方法。
【請求項6】
請求項5記載の半導体パターン計測方法であって、
前記計測手法を選定するステップは、
前記計測手法データと前記パターン情報とを比較し、前記計測対象部を計測する前記計測手法
を前記計測手法ライブラリから選定することを特徴とする半導体パターン計測方法。
【請求項7】
請求項3記載の半導体パターン計測方法であって、
前記ユーザ入力情報は、計測位置の情報と、計測範囲の情報と、計測項目の情報と、計測
対象の情報と、抽出された前記形状情報のいずれかひとつ以上から構成されることを特徴
とする半導体パターン計測方法。
【請求項8】
請求項7記載の半導体パターン計測方法であって、
前記計測項目の情報は、平均値と,最大値と,最小値のいずれかひとつ以上から構成され
ることを特徴とする半導体パターン計測方法。
【請求項9】
請求項7記載の半導体パターン計測方法であって、
前記計測対象の情報は、ライン、スペース、ホールのいずれかひとつ以上から構成される
ことを特徴とする半導体パターン計測方法。
【請求項10】
請求項7記載の半導体パターン計測方法であって、
前記形状情報は、パターンの平行性と、直線性と、曲線近似性のいずれかひとつ以上から
構成されることを特徴とする半導体パターン計測方法。
【請求項11】
請求項1記載の半導体パターン計測方法であって、
前記寸法の計測を行うステップにおいて、
選定された前記計測手法を用いて計測対象部の寸法の計測と、前記寸法の計測から計測再
現性を求めることを特徴とする半導体パターン計測方法。
【請求項12】
請求項11記載の半導体パターン計測方法であって、
前記寸法を出力するステップにおいて、
計測された前記寸法と、求められた前記計測再現性とを出力することを特徴とする半導体
パターン計測方法。
【請求項13】
請求項1記載の半導体パターン計測方法であって、
前記抽出するステップにおいて抽出された前記形状情報を用いて、指定された前記計測対
象部のエッジを検出し、検出された前記エッジのエッジ点列を求め,前記エッジ点列を基
に抽出するエッジ点列抽出ステップを有することを特徴とする半導体パターン計測方法。
【請求項14】
ウェーハ上に形成された半導体パターンを計測する半導体パターン計測装置であって、
予め作成しておいた複数のパターン計測手法を有する計測手法ライブラリを記憶する計測
手法記憶手段と、
電子線により半導体パターンの画像を取得する撮像画像取得手段と、
半導体パターンの画像から計測対象部を指定される手段と、
指定された前記計測対象部の形状情報を抽出する手段と、
抽出された前記形状情報を用いて前記計測手法記憶手段に記憶された計測手法ライブラリ
から前記計測対象部を計測する計測手法を選定する手段と、
選定された前記計測手法を用いて、前記計測対象部の寸法の計測を行う手段と、
計測された前記寸法を出力する手段と、
を有することを特徴とする半導体パターン計測装置。
【請求項15】
請求項14記載の半導体パターン計測装置であって、
前記記憶手段は、前記計測手法と計測手法適用要件とを計測手法データとして記憶すること
を特徴とする半導体パターン計測装置。
【請求項16】
請求項14記載の半導体パターン計測装置であって、
前記計測対象部を指定される手段において指定された前記計測対象部のユーザ入力情報を
入力される手段と、
を有することを特徴とする半導体パターン計測装置。
【請求項17】
請求項16記載の半導体パターン計測装置であって、
計測対象部を計測する計測手法を選定する手段において、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部を
計測する前記計測手法を前記計測手法ライブラリから選定することを特徴とする半導体パ
ターン計測装置。
【請求項18】
請求項15記載の半導体パターン計測装置であって、
前記計測対象部を指定される手段において指定された前記計測対象部のユーザ入力情報を
入力される手段と、
前記形状情報を抽出する手段は、
入力された前記ユーザ入力情報と抽出された前記形状情報とを用いて、前記計測対象部の
パターン情報を作成することを特徴とする半導体パターン計測装置。
【請求項19】
請求項18記載の半導体パターン計測装置であって、
前記計測対象部を計測する計測手法を選定する手段において、
前記計測手法データと前記パターン情報とを比較し、前記計測手法ライブラリから前記計
測対象部を計測する前記計測手法を選定することを特徴とする半導体パターン計測装置。
【請求項20】
請求項14記載の半導体パターンの計測装置であって、
前記指定された計測対象部の形状情報を抽出する手段において抽出された前記形状情報を
用いて、指定された前記計測対象部のエッジを検出し、検出された前記エッジのエッジ点
列を求め,前記エッジ点列を基に抽出するエッジ点列抽出手段を有することを特徴とする
半導体パターン計測装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2013−88415(P2013−88415A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−232469(P2011−232469)
【出願日】平成23年10月24日(2011.10.24)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月24日(2011.10.24)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]