
半導体基板の運搬および大気中保管のための輸送支持具を処理する方法、ならびにそのような方法を実施するための処理ステーション
【課題】 輸送支持具の固定時間を短縮し、輸送支持具の壁の満足のいく清浄度を保証するために使用される、洗浄ステージ後の、異物、特に分子汚染化合物(AMC、VOC)および/または湿気の除去を大幅に改善かつ加速する、方法、ならびに輸送支持具用の処理ステーションを提案する。
【解決手段】 基板の運搬および保管のための輸送支持具(1)の処理方法であって、
前記輸送支持具(1)上の処理されるべき表面(1a)から異物を除去するために前記処理されるべき表面(1a)がその間に準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらされる処理ステージを含み、前記赤外線は断続的赤外線であり、材料の温度を最高許容温度を超えない温度設定あたりで維持するために、満足のいく継続時間にわたって交互に切断/回復されることを特徴とする。
【解決手段】 基板の運搬および保管のための輸送支持具(1)の処理方法であって、
前記輸送支持具(1)上の処理されるべき表面(1a)から異物を除去するために前記処理されるべき表面(1a)がその間に準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらされる処理ステージを含み、前記赤外線は断続的赤外線であり、材料の温度を最高許容温度を超えない温度設定あたりで維持するために、満足のいく継続時間にわたって交互に切断/回復されることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体ウエハまたはレチクル用の輸送ポッドなど、基板の運搬および大気中保管のための輸送支持具を処理する方法であって、輸送支持具が、純水による洗浄など、液体を使用した事前クリーニングを場合によっては受けている方法に関する。
【0002】
本発明は、また、このような方法を実施するための処理ステーションも含む。
【背景技術】
【0003】
輸送および保管ポッドは、基板の輸送および使用環境から隔てられた、1つまたは複数の基板の輸送および保管のための大気圧下の密閉空間を構築する。
【0004】
半導体製造業では、これらのポッドは、あるデバイスから別のデバイスへと半導体ウエハもしくはレチクルなどの基板を輸送するために、または2つの製造ステージの間に基板を保管するために使用される。
【0005】
特に、ウエハを輸送/保管する前面開口式の一体型ポッド(FOUP:front opening unified pod)と、底面開口式の標準機械的インターフェース・ポッド(SMIFポッド(standard mechanical interface pods))、「オープン・カセット(open cassette)」ポッド、レチクルの輸送および保管のためのレチクルSMIFポッド(RSP:Reticle SMIF Pods)、太陽産業用の基板の輸送のためのポッドとが、区別される。
【0006】
これらの輸送ポッドは、ポリカーボネートなどの材料で作製されており、それらの材料は、場合によっては、輸送ポッドの製造および/またはそれらの使用の結果生じる可能性のある汚染物質、特に、有機物、塩基、アミン、酸、およびドーパント汚染物質(AMC)を濃縮するおそれがある。
【0007】
さらに、半導体の製造の間、輸送ポッドが取り扱われ、それが、輸送ポッドの壁内にとどまる汚濁粒子(pollutant particles)の形成をまねいて輸送ポッドを汚染する。その後、輸送ポッドの壁に付着している粒子は、ゆるんで、これらのポッド内に保管された基板上に落下し、それらを損傷するおそれがある。
【0008】
したがって、これらのポッドを脱イオン水などの液体で洗浄する、これらのポッドの定期的なクリーニングが計画される。5〜7分間続くこの洗浄ステージの後、例えば、輸送ポッドが赤外線によって加熱された高温空気の対流によって加熱され、遠心分離にかけられる段階、それに続く、輸送ポッドが開放空気中に放置される段階を含めた、はるかに長い乾燥ステージ(5〜8時間)が続く。
【0009】
クリーニング流体、より具体的には水蒸気の残留物は、除去する必要のある主要な汚染物質である。
【0010】
乾燥ステージの欠点は、それが十分に効果的ではないことである。
【0011】
輸送ポッドを構成する材料を損傷するのを回避し、また輸送ポッドが変形して自動機械用途に適さないものになるのを回避する必要があるので、対流によって加熱する空気の温度は、50℃に制限されている。その場合、そのような温度は、すべての残留液体を除去するには低すぎる。
【0012】
同様に、遠心分離処理された輸送ポッドの回転速度は、新しい汚染粒子を作り出さないように制限される。
【0013】
それゆえに、水残留物がポッドの壁内に捕捉されたままになる。
【0014】
乾燥は、また、矛盾したものであると記載しておく。
【0015】
輸送ポッドは、湿気および他の異物を捕捉する領域を形成する、接近困難な多くのデッド・エリアを含む、複雑なジオメトリを有する。
【0016】
さらに、輸送ポッドは、すべてが同じ製造プロセスから得られるわけではなく、特定のポッドが開放空気中で他のポッドよりも長い乾燥時間を必要とする場合がある。さらに、特定のポッド壁は新しいが、他のポッド壁は、すでに頻繁に取り扱われていて、より多孔質な表面を呈する。
【0017】
開放空気中に長時間置いた後でさえ、特定の輸送ポッドは、湿ったままである。
【0018】
さらに、開放空気中での乾燥は、輸送ポッドの数時間にわたる固定を必要とする。ポッドの壁の脱着流が十分に低い許容可能なレベルに達するには、平均して5〜8時間が必要とされる。
【0019】
したがって、製造業者らは、輸送ポッドが完全に乾燥するのを待つ間それらの輸送ポッドがその中で保管される大きな乾燥室の設置を計画する。
【0020】
同様に、輸送ポッドの大きなフリート(fleets)が必要とされる。
【0021】
雰囲気の清浄度、温度、湿度、および圧力を時々調節しなければならないこれらのクリーン・ルームの設置ならびにロジスティクス管理は、主要かつ高価な投資となる。
【0022】
さらに、ますます厳しくなる汚染基準により、製造業者らは、輸送ポッドのクリーニング頻度を高め、したがって、乾燥ステージの完了を待つ間それらの輸送ポッドの保管に必要なスペースをさらに増大させることを余儀なくされている。
【0023】
したがって、輸送ポッドなどの輸送支持具のより効果的かつ迅速なクリーニングを保証する必要がある。
【0024】
1つの困難は、輸送支持具の大部分を構成する材料が、一般に多孔質で、除去または阻止する必要のある異物を収容する傾向にあることである。
【0025】
他の困難は、輸送支持具が、汚濁粒子を発生させる危険のある接触クリーニングに対応していないことである。
【0026】
マイクロ波放射線が残留湿気を加熱してその除去を助ける可能性が検討された。しかし、この方法は、接地できない金属要素とRF波識別デバイスとを含む次世代の輸送支持具とともに使用することができない。
【0027】
他の制約は、輸送支持具の表面汚染を最小限に抑えなければならないことであり、一般に、輸送支持具の内側表面は、65nmよりも大きな粒子を含んでいてはならず、湿気を含んでいてはならず、干渉電荷を含んでいてはならない。
【発明の概要】
【発明が解決しようとする課題】
【0028】
したがって、本発明の目的は、輸送支持具の固定時間を短縮し、輸送支持具の壁の満足のいく清浄度を保証するために使用される、洗浄ステージ後の、異物、特に分子汚染化合物(AMC、VOC)および/または湿気の除去を大幅に改善かつ加速する、方法、ならびに輸送支持具用の処理ステーションを提案することである。
【0029】
実際には、本発明は、輸送支持具を劣化または変形させることなく、また干渉静電荷を生み出すことなく、10分足らずの処理を保証することを目的とする。
【課題を解決するための手段】
【0030】
この目的で、本発明は、輸送支持具上の処理されるべき表面から異物を除去するために、前記処理されるべき表面がその間に準大気圧(subatmospheric)のガス圧と赤外線との複合作用にさらされる処理ステージを含む、基板の運搬および保管のための輸送支持具を処理する方法を提案する。
【0031】
処理されるべき表面に作用する準大気圧のガス圧と赤外線とのこの複合作用のおかげで、異物の除去は、特に迅速かつ完全となり、輸送支持具を劣化または変形させることなく、必要な時間内に、換言すれば10分足らずでクリーンな輸送支持具にするという予期せぬ手段を提供する。
【0032】
約10分足らずという可能な限り短い処理時間に達するために、処理されるべき表面がさらされるガス圧を可能な限り低減することを目的とする。ただし、低すぎる圧力は、蒸発を加速させ、また同時に液体の温度を降下させるが、また、除去されるべき液体異物の凝固を回避することが不可欠であり、これは、そのような凝固が、これらの異物を除去するのにかかる時間を大幅に延長させ、処理の終わりを検出するのをほぼ不可能にして、得られるクリーニングの質が満足のいかないものになるからである。
【0033】
このような不都合な凝固を回避するために、本発明の方法の間、有利には、準大気圧が、除去されるべき液体異物の状態図の三重点の圧力よりも大きいままであることを保証することができる。
【0034】
同時に、除去されるべき異物をそれらの凝固を回避するのに十分に高い温度に置くために、赤外線の効率を高めるとともに、この温度を、それを超えると、例えば輸送支持具を自動機械用途に適さないものにする変形によって、または例えば輸送支持具を多孔質で汚濁の影響を受けやすいものにする材料の構造的変化によって輸送支持具が劣化するおそれのある、許容温度限界未満に維持することに関心がもたれる。
【0035】
この理由から、赤外線は、好ましくは、除去されるべき1つまたは複数の異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを有するべきである。
【0036】
好ましくは、赤外線は、処理されるべき表面を適切な温度に設定する初期の連続的ステージを含むことのできる断続的赤外線とすることができる。したがって、赤外線は、好ましくは除去されるべき水ベースの異物に作用を及ぼし、初期ステージは、適切な温度への設定を加速して処理時間を大幅に短縮するために使用される。さらに、これは、赤外発光スペクトルと、処理されるべき表面の温度とを別々に制御するために使用される。
【0037】
実際には、断続的な放射を実施するために、処理されるべき表面の温度を代表する試験温度を有利には測定することができ、前記試験温度にしたがって、処理されるべき表面の前記温度を最高許容温度閾値よりも低い温度設定の近傍で維持するように、赤外線を制御することができる。これによって、最高許容温度に可能な限り近づくことが可能となり、したがって、処理時間が短縮される。
【0038】
また、処理時間を短縮することを目的として圧力を可能な限り低く設定すると、準大気圧のガス圧を有利には測定し、圧力設定と比較して、その比較に応じて、準大気圧のガス圧を圧力設定あたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス、ガス流注入コンダクタンスなど、圧力を調節する手段を制御することができる。
【0039】
前述のように、異物を除去する際の困難の1つは、輸送支持具の複雑な形状にある。この複雑な形状は、異物がその中に蓄積し、したがって除去が非常に困難となるおそれのある、捕捉領域または陥凹部を含む。
【0040】
これらの陥凹領域から異物を除去する時間は、処理されるべき表面上の異物が捕捉された少なくとも1つの領域の近くに局所的なガス流が注入されるステージを可能にすることによって、さらに短縮することができる。局所的なガス流は、捕捉領域の汚濁要素の除去に寄与して、処理時間を大幅に短縮する。使用されるガスは、例えば、窒素またはヘリウムとすることができ、後者は、より効果的で、処理時間をさらに短縮できるようになる。
【0041】
処理の終わりに、処理されるべき表面が、その間に、除去されるべき異物を含まないクリーンなガス流の注入による周囲温度あたりへの温度の漸次降下と、それと同時の大気圧あたりへのガス圧の漸次増大とにさらされる、コンディショニング・ステージを有利には含めることができる。
【0042】
クリーンなガス流は、このステージの間、処理されるべき表面領域をクリーンなガス分子で飽和させるために使用され、それが、次いで、処理された表面が圧力上昇および冷却の間にスポンジ効果を通じて周囲雰囲気によって再び汚濁されるのを回避する。
【0043】
クリーンなガス流は、有利には、十分に低速で、例えば大気圧あたりで0.4m/s未満で選択されるべきであるが、高流量を可能にし、したがって干渉静電荷の生成および汚濁粒子の取込みを回避するために、広く分散すべきである。
【0044】
このような多量の、ただし低速のガス流によって、蒸気相は、液体残留物の近くで排出され、したがって、液体蒸気平衡がシフトし、それによって処理を加速させる。
【0045】
経済上および安全上の理由から、準大気圧プロセスの終わりに、窒素または空気が好ましくは使用されるべきである。
【0046】
有利な一実施形態によれば、処理されるべき表面からの異物の除去を代表するパラメータを測定することができ、処理は、その代表パラメータが参照値に達した後で中断される。
【0047】
このように、処理前に輸送支持具が呈した実際の条件に処理を適合させる、効果的な処理を保証することができる。
【0048】
例えば、代表パラメータは、輸送支持具の重量、または真空ポンプの出口のところの湿気もしくはAMCの量、または密封チャンバ内のガス圧とすることができる。
【0049】
他の態様によれば、本発明は、基板の運搬および保管のための輸送支持具処理ステーションであって、
処理されるべき表面をもつ少なくとも1つの輸送支持具を受けるのに適した、ポンピング・デバイスに連結するための密封チャンバと、
前記処理されるべき表面を赤外線にさらすのに適した少なくとも1つの赤外線源と、
前記処理されるべき表面を準大気圧のガス圧と赤外線との複合作用にさらす、ポンピング・デバイスおよび赤外線源を制御するのに適した制御デバイスとを含む、輸送支持具処理ステーションを計画する。
【0050】
このようなステーションは、以上で定義した方法を実施し、非常に短い処理時間と効果的な処理とを得るために使用される。
【0051】
好ましくは、処理ステーションは、密封チャンバ内に置かれた、処理されるべき表面の温度を代表する試験温度を測定するのに適した少なくとも1つの温度センサを含むべきである。
【0052】
したがって、処理されるべき表面の温度を常に知り、必要に応じてその温度を記憶して、劣化がないことを保証することが可能である。
【0053】
実際には、特定の一実施形態によれば、温度センサは、その一方の面が前記赤外線にさらされ、その反対側の面が温度プローブと接触している、処理されるべき輸送支持具を構成するのと類似の材料で作製された小さい厚さの試験層を含む。
【0054】
このように、温度センサは、密封チャンバ内に存在することができ、密封チャンバ内に輸送支持具を挿入するまたは密封チャンバ内の輸送支持具を除去するステージの間、その温度センサを移動するまたは配線する必要がない。
【0055】
試験層の温度は、原則として、処理されるべき表面の温度に非常に類似しており、試験層の厚さが小さいので、温度プローブは、処理されるべき表面の温度に非常に近い温度を測定することができる。
【0056】
好ましくは、制御デバイスは、温度センサによって生成される温度データを調べ、温度センサによって測定された温度が、それ自体が最高許容温度閾値を下回る温度設定よりも所定の差を超えて低いときには、赤外線源の電力供給をトリガし、温度センサによって測定された温度が所定の差を超えて前記温度設定を上回るときには赤外線源の電力供給を遮断する、赤外線制御プログラムを含むべきである。
【0057】
したがって、処理ステーションは、処理時間をさらに短縮するために、温度を最高許容温度閾値の可能な限り近くに維持するために使用される。
【0058】
赤外線源が、除去されるべき異物を含む処理されるべき表面領域、特に、凹形領域および他の捕捉領域を本質的に照射可能であることが有益である。
【0059】
したがって、実際には、赤外線源は、箱の形態の輸送支持具の内側に挿入するのに適した少なくとも1つの線源部分を含むことができる。こうして、処理時間が短縮される。
【0060】
やはり処理時間を短縮するために、初期ガス注入デバイスを、また、有利には、処理されるべき表面の近傍に第1の局所的なガス流を注入するように計画することができる。
【0061】
反対に、再加圧の間、注入されるガスが低速で分散した流れを生み出すことが好ましい。したがって、第2のガス注入デバイスは、有利には、処理されるべき表面から隔てられた密封チャンバにクリーンなガス流を注入するように計画することができる。
【0062】
有利な一実施形態によれば、処理ステーションは、処理されるべき表面からの異物の除去を代表するパラメータを測定するデバイスを含むことができ、また、制御デバイスが、代表パラメータが参照値に達するときには処理を中断するのに適したものとなるように、計画することができる。
【0063】
実際には、処理ステーションは、少なくとも1つの輸送支持具の重量を測定し、重量信号を生成することが可能となるように位置決めされた少なくとも1つの電子はかりと、重量信号を処理して前記重量信号から処理ステージの終わりを推定する手段とを含むことができる。
【0064】
はかりは、輸送支持具が前記はかりに力を加えるときに電磁補償を生み出すことができるように永久磁石の磁場内に置かれた少なくとも1つの補償巻線を含む、電気的フィードバック回路を含むことができる。
【0065】
代替形態として、処理ステーションは、有利には、ポンピング・デバイスの真空ポンプの出口のところの湿度および/もしくはAMCセンサ、ならびに/または密封チャンバの圧力計を含むこともできる。
【0066】
処理ステーションは、別々にまたは組み合わせて採用できる、他の特徴、特に、以下の特徴を有することができる:
チャンバの閉位置でガスケットを圧迫するのに適した少なくとも1つのシリンダを含む、チャンバの密閉カバーとは反対側でチャンバの開口部の周辺に置かれたガスケット、
前記ステーションのフレームの下面と床との間に置かれた、振動を減衰させるデバイス、
チャンバに連結された誘導励起セルを含み、前記セルの内側にプラズマを形成するのに適した電磁励起アンテナを含む、ガス種のための制御デバイス。
【0067】
処理ステーションは、さらに、輸送支持具を液体でクリーニングする機器に連結することができ、前記クリーニング機器は、当該クリーニング機器から前記処理ステーションへと輸送支持具を運ぶためのデバイスを含む。
【0068】
本発明は、また、真空ポンプと前述のような少なくとも1つの処理ステーションとを含む処理機器に適用される。
【0069】
他の利点および特徴は、添付図面に関連して作成された本発明の説明を読めば明らかになる。
【図面の簡単な説明】
【0070】
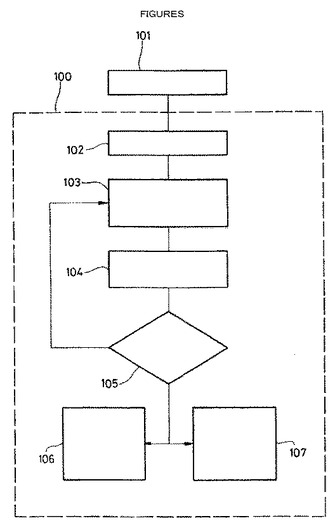
【図1】本発明の一実施形態による方法の様々なステージを示すフローチャートである。
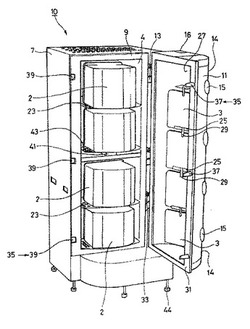
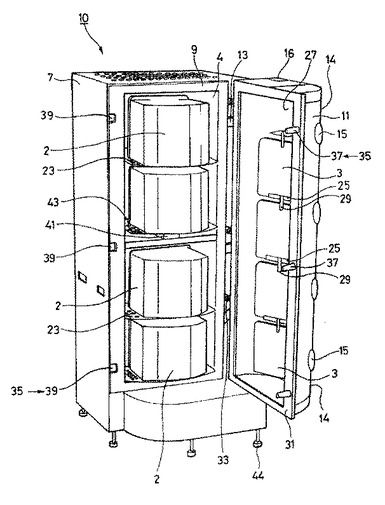
【図2】本発明の一実施形態による、開位置の処理ステーションの側面斜視図である。
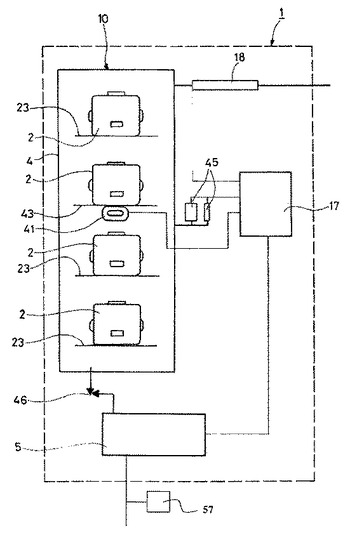
【図3】図2の処理ステーションの概観図である。
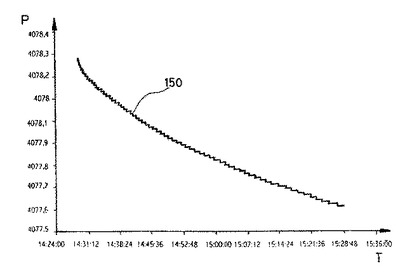
【図4】真空内に置いたときの時間による輸送支持具の測定重量の漸進的変化を表すグラフである。
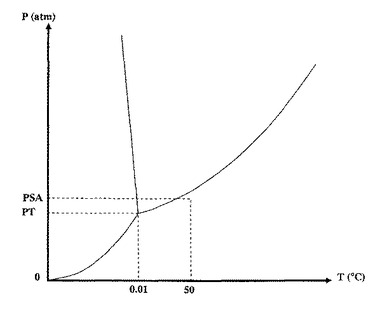
【図5】水の状態図である。
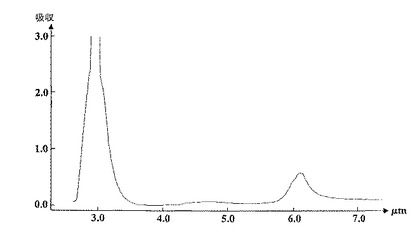
【図6】水による赤外線吸収についての曲線を示す図である。
【図7】本発明の一実施形態による温度センサの正面図である。
【図8】本発明の一実施形態による温度センサの背面図である。
【図9】本発明の一実施形態による温度センサの断面図である。
【図10】図7〜9の温度センサの動作を図式的に示す図である。
【図11】当該方法の間の赤外線、温度、および圧力の変動を示す時間図である。
【発明を実施するための形態】
【0071】
これらの添付図では、同一の要素には同じ参照番号が与えられている。
【0072】
明瞭にするために、当該方法の諸ステージには、100から始まる番号が付けられており、ステーションの諸要素には、1〜60の番号が付けられている。
【0073】
図1は、基板の運搬および保管のための輸送支持具の処理方法のフローチャート(破線の長方形100の内側)を示す。
【0074】
この方法は、例えば、図1に示されるステージ101にしたがって、脱イオン水による洗浄など、予め液体によるクリーニングを受けていることのある、図2に示される輸送支持具1に適用される。
【0075】
輸送支持具1は、半導体ウエハ、レチクル、太陽産業用の薄膜などの基板の運搬および大気中保管のための手段である。
【0076】
例えば、輸送支持具1は、輸送ポッドのケーシング2、ポッド扉3、および/または輸送ポッド自体である。輸送ポッドは、特に、タイプFOUP、SMIFポッド、RSPもしくは「オープン・カセット」の一体型輸送ポッド、または太陽センサ用の基板のための輸送ポッドとすることができる。
【0077】
本発明による方法は、その間に輸送支持具1が真空ポンプ5に連結された密封チャンバ4内に置かれ(ステージ102)、輸送支持具1の処理されるべき表面1aが真空ポンプ5を通じた準大気圧のガス圧PSA(ステージ103)と赤外線IRとの複合作用にさらされる、図3および10に示される処理ステージを含むことを特徴とする。
【0078】
壁の処理によって、わずか約10分後の満足のいくレベルまでの乾燥と、壁の脱ガス(degassing)の最適化との両方が可能になる。
【0079】
輸送支持具1のこの処理は、乾燥および脱着を通じて、特に水などのクリーニング剤の液体残留物およびそれらの蒸気の形態、ときには特定の固体残留物までをも、除去することを目的とする。
【0080】
さらに、従来技術の方法とは異なり、それについての脱着流のレベル、したがって乾燥のレベルを、ある支持具から別の支持具へと完全に再現可能である輸送支持具を得るために、当該方法が使用されることが観察される。
【0081】
従来技術の乾燥方法では、第1に、残留水蒸気は、輸送支持具1のデッド・エリア内にとどまったままになるおそれがあり、第2に、脱ガス・レベルは、輸送支持具の履歴に依存した。
【0082】
したがって、当該方法の再現性は、液体クリーニングに続く同じ処理方法の後で輸送支持具1が同じ清浄度レベルを有することを保証するために使用される。
【0083】
例えば、輸送支持具1は、それについての準大気圧PSAが1000mbar未満、好ましくは約100mbarまたは約10mbarである1次真空にさらされ、準大気圧PSAが除去されるべき異物の状態図の三重点の圧力PTよりも高いままであることが観察される。例えば、除去されるべき異物が水の場合、三重点の圧力PTは、6mbarである(図5参照)。
【0084】
処理されるべき表面1a上の水などの液体異物の除去後、輸送支持具1の壁の脱ガス流をさらに低いレベルまで除去するために、輸送支持具1を、それについての準大気圧が0.1mbar未満、好ましくは約0.001mbarである2次真空にさらすことができる。
【0085】
したがって、例えば、輸送支持具1を1次ポンピングにさらし始め、次いで、必要とされる乾燥レベルが得られたときには2次ポンピングに切り替えるように計画することができる。
【0086】
当該方法によれば、輸送支持具1は、準大気圧PSAにさらされながら、赤外線IRによって加熱される。
【0087】
輸送支持具1は、赤外線IRによって予め定められた温度まで加熱される。
【0088】
赤外線IRから放出される出力は、輸送支持具1材料の最高許容温度TAを超えるのを回避するように、輸送支持具1材料の温度TMを測定することによって制御される。
【0089】
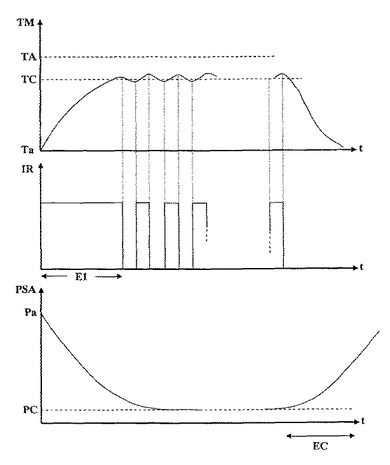
図11は、赤外線加熱プロセスについての好ましい実施形態を示す。この場合、赤外線IRは、断続的である。それは、有利には、処理されるべき表面1aを適切な温度に設定する連続的な初期ステージE1を含む。次いで、赤外線IRは、材料の温度TMを温度設定TCあたりで維持するために、満足のいく継続時間にわたって交互に切断/回復される。同時に、断続的な赤外線を可能にすることによって、赤外線発生デバイスの波長スペクトルを制御しながら処理されるべき表面1aの温度を制御できるようになる。
【0090】
赤外線放出が連続的である初期ステージE1の間に、材料の温度TMは、温度設定TCに達するまで急速に上昇する。次いで、温度TMは、それ自体が最高許容温度閾値TAよりも低い、温度設定TCあたりで維持される。
【0091】
実際には、処理されるべき表面1aの温度TMを代表する試験温度が測定され、赤外線IRは、前記試験温度にしたがって制御され、温度TMが、所定の差だけ、例えば1度、温度設定TCを超えるときには、赤外線IRは、遮断される。次いで、温度TMが、所定の差だけ、例えば1度、温度設定TC未満に降下するときには、赤外線は、回復される。その結果、図11の時間図に示される温度TM曲線が得られる。
【0092】
さらに、赤外線IR波長発光スペクトルは、輸送支持具1の表面上および輸送支持具1の材料の内側の第1の層内で加熱が起こるような形で、好ましくは除去されるべき液体異物上で加熱が起こるような形で選択することができる。したがって、約3μmの波長が、水を除去するのに有利である。
【0093】
また、除去されるべき2以上のタイプの元素によって選択的に吸収されやすい2以上の異なる波長に対して赤外線を作用させるように選択することも可能である。
【0094】
実際には、赤外線IRは、有利には、除去されるべき1つまたは複数の異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを有することができる。
【0095】
温度設定TCは、有利には周囲温度よりも高く、好ましくは約50℃である。
【0096】
準大気圧PSAが可能な限り低く、ただし、除去されるべき物体の三重点の圧力PTよりも永久的に高いままであることが不可欠であり、さもなければ、除去されるべき液体物体が固体化するおそれがあり、それらの除去が非常に低速になる。この理由から、ガス圧PSAを有利には密封チャンバ4の内側で測定し、圧力設定PCと比較して、その比較に応じて、準大気圧のガス圧PSAを圧力設定PCあたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス46、ガス流注入コンダクタンス18など、圧力を調節する手段を制御することができる。
【0097】
輸送支持具1の処理されるべき表面1a上の異物の捕捉領域の近くに局所的なガス流47を注入することによって、処理の大幅な加速が得られると記載した。そのような局所的なガス流47(図10)は、処理されるべき表面1aの近傍での分子および粒子の取込みに有利にはたらく。
【0098】
好ましくは、処理されるべき表面1aを不動態化(passivates)する、密封チャンバ4を大気圧に設定するために使用できるクリーンなガスの吸収に、冷却が有利にはたらくので、周囲温度および大気圧の近傍への復帰が行われて、輸送支持具1を密封チャンバ4の内側で維持する。
【0099】
実際には、処理されるべき表面1aが、その間に、大気圧Paあたりへのガス圧PSAの漸次上昇と、除去されるべき異物を含まないクリーンなガス流48の注入による周囲温度Taあたりへの温度TMの降下とにさらされる、コンディショニング・ステージECを有利には計画することができる(図11)。クリーンなガス流48(図10)は、局所的ではなく、換言すれば、密封チャンバ4内に分散しなければならない。クリーンなガス流48は、十分に低速で選択され、高流量を可能にして干渉静電荷の生成および処理されるべき表面1a上の汚濁粒子の取込みを回避するために、広く分散される。
【0100】
処理に必要な時間は、好ましくは同じ事前の洗浄ステージを受けた同じタイプのポッドとおおむね同等になると考えることができる。この場合、処理は、輸送支持具1のタイプに特徴的な予め定められた継続時間の後で中断することができ、それから輸送支持具1が準大気圧にさらされる。
【0101】
図1のフローチャートに示される有利な一変形形態によれば、輸送支持具1の処理されるべき表面1aからの異物の除去に特徴的なパラメータが測定され(ステージ104)、このパラメータの漸進的変化(evolution)は、輸送支持具1のタイプを考慮に入れた参照、換言すれば、参照値または参照曲線と比較される(ステージ105)。
【0102】
参照は、輸送支持具1の満足のいくレベルの脱着に、したがって乾燥に特徴的であり、処理は、代表パラメータが参照に達するときには中断することができる。
【0103】
各タイプの輸送支持具1は、サイズ、材料、構造、ジオメトリなど、1組の物理的パラメータによって特徴付けることができる。具体的には、一体型タイプのポッド、例えば、FOUPタイプ・ポッド、SMIFポッド、RSPもしくは「オープン・カセット」タイプ・ポッド、または太陽センサ用の基板のための輸送ポッドがある。
【0104】
次いで、測定パラメータが参照以下になったら可能な限り早く密封チャンバ4内の圧力が大気圧へと増大するように計画することができる。
【0105】
大気圧Paは、クリーン・ルームの気圧など、輸送支持具1の使用環境内でのそれらの輸送支持具1の圧力である。
【0106】
測定されたパラメータが参照以下になるときには、脱着流のレベルは、十分に低いレベルに達している。
【0107】
この場合、密封チャンバ4内の圧力を高め、輸送支持具1を除去する(ステージ106)か、または、再使用されるのを待つもしくは密封チャンバ4内のスペースを確保するのを待つ間、輸送支持具1がその壁を脱着させ続けるように、輸送支持具1を真空内で保管する(ステージ107)か、選択することができる。
【0108】
1つの可能性によれば、特徴的なパラメータは、密封チャンバ4内のガスの全圧または分圧である。
【0109】
ポンピングの限界真空状態での全圧の測定は、主に、処理されるべき輸送支持具1の脱ガスによって生じる、密封チャンバ4内の脱着流の指標である。
【0110】
この測定方法は、高流量のガス(数sccm程度)にはきわめて効果的である。しかし、脱着流が比較的低流量(数sccm未満)であるときには、この測定技術は、確度に欠けることがある。
【0111】
さらに、ガス流47が密封チャンバ4に注入されるときには、脱着流の信号は、注入された流れの信号とともに消えることがある。
【0112】
また、当該方法が、その間にパージ・ガスが密封チャンバ4に導入されるパージ・ガス充填操作と、その間にパージ・ガスと初期ガスとの混合物がポンピングによって密封チャンバ4から抜き出されるパージ・ガス・ポンピング操作とを含む、追加のパージ・ステージを含むことが可能である。
【0113】
他の可能性によれば、特徴的なパラメータは、輸送支持具1の測定重量である。
【0114】
重量の値は、異物の除去とともに、また輸送支持具1の壁の脱ガス流とともに変化する。
【0115】
測定は、好ましくは、輸送支持具1が経験する浮力および密封チャンバ4内の流れの運動に例えば起因した、測定の擾乱を回避するために、真空ポンプ5の定常状態から開始することができる。
【0116】
図4は、縦軸に重量Pがグラムで与えられ、横軸に時間Tが時間、分、秒で与えられるグラフである。曲線150は、密封チャンバ4が真空内に置かれたときの時間による輸送支持具1の測定重量を表す。
【0117】
支持具1の重量が時間の増加とともに減少することに留意する。輸送支持具1の壁は、真空中で脱ガスする。重量測定は、したがって、輸送支持具1の処理レベルの良好な指標である。
【0118】
他の可能性によれば、参照は、真空ポンプ5の出口における湿気またはAMCの量とすることができる。
【0119】
有利には、参照は、特徴的なパラメータの予め定められた時間変動とすることができる。
【0120】
したがって、圧力または測定重量の時間変動が低くなりすぎるときには、時間による脱着流は、もはや、輸送支持具1を真空内に保つことを正当化するのに十分に高くない場合がある。
【0121】
あるいは、参照は、予め定められた閾値とすることもできる。
【0122】
本発明による処理方法の効率を説明するために、密封チャンバ4内に置かれ、当該方法の様々な作用にさらされた被試験片に試験を実施した。
【0123】
すべての事例で、赤外線IRを被試験片上で使用した。
【0124】
処理の速度を、大気圧の第1の事例と、水の三重点に近い圧力(10mbar)の第2の事例との間で比較し、速度ゲインは、三重点に近い圧力の場合に67%であった。
【0125】
氷の形成をまねく過度に低い圧力(6mbar)と、全乾燥時間にわたって氷の形成が起こらないことを保証する適正な圧力(6.7mbar)とを比較することによって、圧力の適正な維持の重要性について試験を実施した。速度ゲインは、57%であった。次いで、同じ50mbarの圧力について、圧力の維持を保証するためにガス流を挿入する効果を調査した。ガス流の挿入によって、ガス流なしの処理と比較して13%の速度ゲインが可能となった。
【0126】
次いで、挿入されたガス流に対する処理されるべき表面1aの位置決めの効果を調査した。処理されるべき表面1aを注入されたガス流の経路内に位置決めすることによって、19%の速度ゲインを得られることがわかった。
【0127】
また、注入されたガスの性質の効果も調査した。ヘリウムを使用すると、同じ条件で窒素の注入に比較して22%の速度ゲインが得られた。
【0128】
さらに、FOUPタイプの輸送支持具に試験を実施して、処理後の輸送支持具の残りの脱ガスを測定した:
a)1時間にわたって大気圧Paで赤外線(50℃)によって加熱した後、残りの脱ガスは、2.5sccmであった。
b)追加加熱なしに1時間にわたって真空内に置いた後、残りの脱ガスは、0.77sccmであった。
c)1時間にわたって赤外線(50℃)によって追加加熱しながら真空内に置いた後、残りの脱ガスは、0.6sccmであった。
【0129】
これは、真空と赤外線との組合せの相乗効果を示す。
【0130】
本発明によれば、図2に示されるように、処理ステーション10が、また、輸送支持具1のために、基板の運搬および大気中保管のために、前述の処理方法の実施のために、計画される。
【0131】
ステーション10は、好ましくはフレーム7上に据え付けられた少なくとも1つの密封チャンバ4を含む。
【0132】
処理ステーション10の密封チャンバ4は、真空ポンプ5ポンピング・デバイス(図3参照)に連結するためのものであり、処理されるべき表面を備えた、基板のための輸送ポッドなど、少なくとも1つの輸送支持具1を受けるのに適している。
【0133】
処理ステーション10は、輸送支持具1の処理されるべき表面1aを赤外線IRにさらすのに適した、少なくとも1つの赤外線源49を含む。
【0134】
図2は、処理ステーション10が4つのFOUPタイプの輸送ポッドを受ける様子を示す。
【0135】
第1の変形形態によれば、真空ポンプ5は、1次真空ポンプである。
【0136】
あるいは、真空ポンプ5は、1次真空ポンプに連結するための導管と、処理方法を実施するときに1次ポンピングから2次ポンピングへと切り替えることができるように、2次ポンプに連結するための、1次真空ポンプの上流の導管の分岐とを含むこともできる。
【0137】
密封チャンバ4は、好ましくは円筒形で、真空内に置かれるのに耐えるようにステンレス鋼で作製される。密封チャンバ4は、また、有利にはヒンジ13(図2)上に据え付けられた、密閉カバー11によって塞ぐことのできる開口部9を含む。
【0138】
密閉カバー11は、有利には、前面14上に、輸送支持具1が内側に存在するかどうかを操作者が点検できるようにする、例えばガラス製の少なくとも1つの窓15を含む。
【0139】
窓15は、有利には、各輸送支持具1の高さのところに計画される。
【0140】
さらに、密閉カバー11の前面14は、有利には、処理ステーション10の動作状態を信号で伝えるタワー16と、処理ステーション10のCPU17(図3)に接続された表示画面(見られない)とを含む。
【0141】
図3および10からわかるように、密封チャンバ4は、輸送支持具1の処理後に密封チャンバ4を大気圧に設定するために、乾燥窒素を導入する手段など、クリーンなガスを導入する手段60を含む。
【0142】
輸送支持具1が輸送ポッドであるときには、有利には、ポッドを真空内に置くときにポッドの壁を変形させないように、輸送ポッドを開いた状態で密封チャンバ4内に置くことができる。
【0143】
このために、処理ステーション10は、例えば、各輸送支持具1を支持するための棚23、25を含む。
【0144】
図2からわかるように、処理ステーション10は、好ましくは、ポッドのケーシング2がその上に置かれる第1の組の棚23に加えて、対応する扉3がその上に置かれる第2の組の棚25を含むべきである。
【0145】
有利には、第2の組の棚25は、密閉カバー11の内側陥凹部27内で扉3を垂直位置で支持する。
【0146】
第2の組の棚25の棚は、また、その下に置かれたポッドの扉3を保持するための係止タブ29を含む。
【0147】
寸法を制限し、輸送支持具1への接近を簡単にするために、処理ステーション10が、密封チャンバ4の固定部分内の支持具1の最もかさばる部分と、密閉カバー11の陥凹部27内の第2の部分とを受けるのに適したものとなるように計画される。
【0148】
密封チャンバ4は、また、密閉カバー11が閉位置(図示せず)にあるときに密封チャンバ4を封止するように開口部9の周辺に置かれた扉ガスケット31を含む。
【0149】
また、密封チャンバ4の閉位置で扉ガスケット31を圧迫できるように、処理ステーション10が、密封チャンバ4のヒンジ13の関節上に据え付けられた好ましくは空気圧式の少なくとも1つのシリンダ33を含むように計画される。
【0150】
開口部9上の密閉カバー11の案内をさらに改善するために、処理ステーション10のヒンジ13の長さに沿って均一に散在した、いくつかのシリンダ33が計画される。
【0151】
図2に示されるように、ヒンジ13の3つの関節上に配置された3つのシリンダ33が好ましい。
【0152】
扉ガスケット31の均質な圧縮を保証するために、第1に、好ましくはカバー11に連結されたピン37と、第2に、扉ガスケット31の外側で密封チャンバ4の開口部9の周辺に置かれた対応する穴39とからなる、少なくとも1つのガイド35がまた計画される。
【0153】
好ましくは、シリンダ33とおおむね同じ高さで、ヒンジ13を含む側部とは反対側の密封チャンバ4の開口部9の側部に沿って均一に散在した、ヒンジ関節と同数のガイド35が存在すべきである。
【0154】
したがって、密封チャンバ4を閉じるときには、密閉カバー11は、初めに、密封チャンバ4の開口部9上のピン37によって案内され、心合わせされる。
【0155】
適所に置かれたら、次に、シリンダ33の作動を使用して、密閉カバー11を開口部9に押し付けて固定し、したがって、扉ガスケット31を圧迫して、チャンバ4を封止する。
【0156】
この配置は、ヒンジ13の位置で扉ガスケット31に作用するせん断拘束を制限するために使用される。
【0157】
あるいは、密閉カバー11を密封チャンバ4の開口部9上に心合わせするために、密封チャンバ4の開口部9の縁部上におおむね対称的に置かれた、密閉カバー11の少なくとも2つのガイド35を有することが計画される。
【0158】
この代替的な実施形態では、また、単純に密封チャンバ4を真空内に置くことによって扉ガスケット31を圧迫できるように寸法設定されたポンプ5を有することも計画される。
【0159】
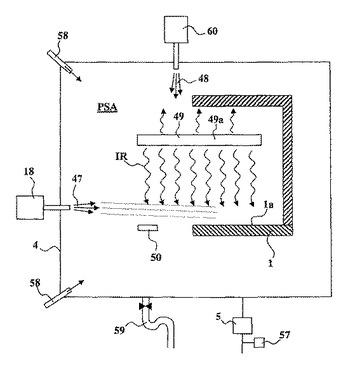
図3および10では、処理ステーション10は、また、第1に、ポンピング・デバイスを使用して密封チャンバ4を準大気圧(PSA)に置くことを管理するために、第2に、赤外線源49を制御するために、CPU17を備えた制御デバイスを含む。このように、処理ステーション10は、処理されるべき表面1aを準大気圧のガス圧と赤外線IRとの複合作用にさらすのに適している。
【0160】
赤外線源49の制御のために、図10に示されるように、有利には、密封チャンバ4内に置かれた、処理されるべき表面1aの温度TMを代表する試験温度を測定するのに適した少なくとも1つの温度センサ50が存在する。温度センサ50は、密封チャンバ4に接続され、処理されるべき表面1aに類似した形で赤外線源49からくる赤外線IRを受け取る領域内に置かれる。赤外線IRの作用が、温度センサ50上に、処理されるべき表面1aが経験する温度上昇に類似した温度上昇を生み出すことが保証される。
【0161】
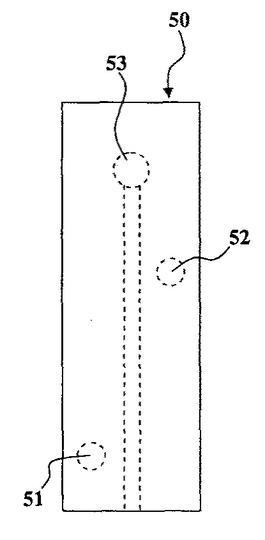
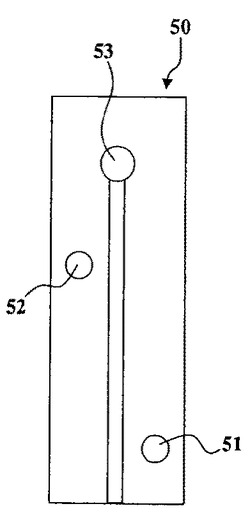
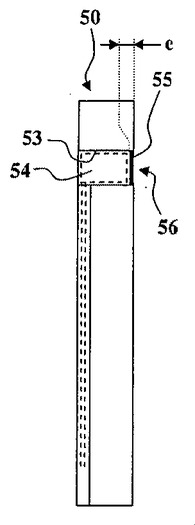
実際には、温度センサ50は、図7〜9に示されるように作り出すことができ、温度センサは、それを密封チャンバ4の壁に取り付ける位置決め穴51および52を備え、また温度プローブ54を挿入する止まり穴53を備えた、処理されるべき輸送支持具1を構成する材料に類似の材料、例えば、炭素負荷PEEK(carbon loaded PEEK)の、長さ約60mm、幅約20mm、厚さ約8mmのおおむね平行平面板とすることができる。
【0162】
止まり穴53は、その一方の面56が赤外線IRにさらされ、その反対側の面が温度プローブ54と接触している、小さい厚さe(約10分の1または10分の2ミリメートル)の試験層55によって塞がれる。試験層55の小さい厚さeは、温度センサ50の低い熱慣性および良好な反応性を保証するために使用される。
【0163】
実際には、CPU制御デバイス17は、温度センサ50によって生成される温度データを調べ、温度センサ50によって測定された温度が、それ自体が許容温度閾値TAを下回る温度設定TCよりも所定の差を超えて低いときには、赤外線源49の電力供給をトリガし、温度センサ50によって測定された温度が所定の差を超えて前記温度設定TCを上回るときには赤外線源49の電力供給を遮断する、赤外線制御プログラムを含む。
【0164】
図10に示される実施形態では、輸送支持具1は、中空の輸送箱型要素である。この場合、赤外線源49は、有利には、箱の形態の輸送支持具1の内側に挿入するのに適した少なくとも1つの赤外線源部分49aを含む。したがって、赤外線源49は、除去されるべき異物を捕捉しやすい凹形箱領域の可能な限り近くにあり、存在しうる影の領域が縮小される。
【0165】
さらに図10に示された実施形態では、処理ステーションは、また、処理されるべき表面1aの近傍で第1の局所的なガス流47を生み出すために、初期ガス注入デバイス18を含む。この第1の局所的なガス流47は、処理の間、密封チャンバ4内のガス圧PSAを維持するための手段として使用することができる。この場合、CPUは、初期ガス注入デバイス18によって保証されるガス流量を管理することができる。
【0166】
ただし、コンディショニング・ステージECでは、第2のガス注入デバイス60が、処理されるべき表面1aから隔てられた密封チャンバ4にクリーンなガス流48を注入するように計画される。
【0167】
さらに、CPU17は、処理の進行に特徴的なパラメータを点検するために使用されるセンサに接続することができる。これらのセンサは、密封チャンバ4の圧力計45(図3)、ならびに/またははかり41、ならびに/または真空ポンプ5の出口のところの湿度および/もしくはAMCセンサ57(図10)とすることができる。
【0168】
圧力測定の代わりに、または圧力測定に加えて、弁を通じて真空ポンプ5の導管に連結できる、または密封チャンバ4に直接連結できる誘導励起セルを含む、ガス種のための制御デバイス(図示せず)を、また、密封チャンバ4のガスと連通するように使用することもできる。
【0169】
ガス種のための制御デバイスは、また、セルの内側にプラズマを形成するような形でこのセルの周りに置かれた、発電機によって電力供給される電磁励起アンテナを含む。
【0170】
次いで、プラズマによって放出される光放射線は、検出され、光学的分光計に送られる。放出は、光ファイバによって、または適合コネクタによって実施することができる。光学的分光計は、検出された光学スペクトルの画像を生成し、それらを例えばCPU17に送る。
【0171】
有利には、また、ステーション10が完全に自動運転できるようにするために、CPU17は、バーコード読取装置、RFID読取装置(変換器)、受信器など、輸送支持具1を識別する手段を含むことができる。
【0172】
本発明の他の特定の実施形態によれば、ステーション10は、少なくとも1つの輸送支持具1の測定された重量の漸進的変化を測定できるように位置決めされた、少なくとも1つの電子はかり41を含む。
【0173】
重量の測定は、輸送支持具1の壁の脱ガス流と相関させることができ、したがって、それらの乾燥の進展を決定できるようになる。
【0174】
測定が有意であるためには、測定の確度は、有利には、数キログラム(FOUPタイプの輸送ポッドでは約4kg、RSPタイプのポッドでは約700g)のフル・スケールについて、約100分の1グラムである。
【0175】
また、外部環境に起因した干渉を制限するために、処理ステーション10が、ステーションのフレーム7の下面と床との間、好ましくはステーション10の足部44の下に置かれた振動を減衰させる手段(図示せず)を含むように計画される。
【0176】
ステーション10がいくつかの輸送支持具1を含むのに適している場合、また、コストを制限するために、輸送支持具1の乾燥の進展は、単一の輸送支持具1を点検することによって決定される。
【0177】
複数の輸送支持具1が同じタイプのもので、同じ事前クリーニング・ステージから得られる場合には、輸送支持具1の測定の結果得られる情報をこれらのすべての輸送支持具1の乾燥の進展に適用できると見なすことができる。
【0178】
したがって、図2に示されるように、処理ステーション10は、FOUPタイプ輸送箱の1つのケーシング2をそれぞれが受けるための、例えば3つの棚または固定式プラットフォーム23を含み、またさらに、FOUPタイプ輸送箱の第4のケーシング2の重量を測定するのに適した、可動式プラットフォーム43の下のはかり41を含む。
【0179】
有利には、はかり41は、輸送支持具1がはかり41に力を加えるときに電磁補償を生み出すことができるように永久磁石の磁場内に置かれた少なくとも1つの補償巻線を含む電気的フィードバック回路を含む。
【0180】
ゼロを読み取った後、はかり41の釣り合いに必要な補償力は、プラットフォーム43に加わる重量に比例しており、したがって、電流の強度は、重量に変換される。
【0181】
一変形実施形態によれば、処理ステーション10は、輸送支持具の洗浄機器(図示せず)に連結される。
【0182】
この変形形態では、ステーション10および/または機器が、洗浄機器から処理ステーション10の密封チャンバ4へと輸送するための、輸送支持具1を運搬する手段を含むように計画される。
【0183】
例えば、運搬手段は、輸送支持具1のための取扱ロボット、またはコンベヤ・ベルトである。
【0184】
また、1つまたは複数の処理ステーション10と洗浄機器(図示せず)との間に移送チャンバが存在してもよい。
【0185】
また、真空ポンプ5と、好ましくは単一のFOUPタイプ輸送支持具1を受けるのに適した少なくとも1つの処理ステーションとを含む、処理機器が存在してもよい。
【0186】
したがって、操作に際しては、処理ステーション10は、洗浄ステージ後に処理方法を実施するのに適している。
【0187】
カバー11を使用して閉じられた密封チャンバ4内に輸送支持具1を置くことから始める。
【0188】
次いで、ポンプ5を使用して、密封チャンバ4内に含まれるガスを排出し、赤外線IRを発生させる。
【0189】
ポンピングによるガスの排出、および赤外線IRは、有利には、除湿の進行に特徴的なパラメータの漸進的変化と参照とを比較した結果に応じて停止させることができる。
【0190】
次いで、輸送支持具1を冷ましておき、第2のガス導入デバイス60を通じたクリーンなガスの導入を通じて、密封チャンバ4の圧力を大気圧まで上昇させ、次いで、密閉カバー11を開けて輸送支持具1を密封チャンバ4から取り除く。
【0191】
他の実施形態によれば、処理ステーション10は、また、真空処理ステージの前に輸送支持具1を密封チャンバ4自体内で直接洗浄できるようにする、流出(run−off)手段59を備えた固定式または可動式ジェットなどの洗浄デバイス58を含むことができる。こうして、取扱デバイスの使用は、それに付随した再汚染の危険とともに回避される。全体的な処理時間は、短縮される。処理の有効性は、また、同時の除染と洗浄デバイス自体の制御とを通じて高められる。これは、また、コストを削減し、スペースを節約する。
【0192】
輸送支持具の本発明による処理方法を通じて、また、当該方法を実施する本発明による処理ステーションの使用を通じて、輸送支持具1は、真空内に置かれ、処理されるべきその表面1aは、選択的に加熱される。これは、輸送支持具1の壁の上、特に、支持具の材料の第1の層内の液体の蒸発に有利にはたらき、したがって、異物の除去のための処理を加速させる。
【0193】
本発明は、明確に記載した諸実施形態だけに限定されず、むしろ、当業者が実現可能な範囲内のいずれの変形形態および一般化形態も含む。
【技術分野】
【0001】
本発明は、半導体ウエハまたはレチクル用の輸送ポッドなど、基板の運搬および大気中保管のための輸送支持具を処理する方法であって、輸送支持具が、純水による洗浄など、液体を使用した事前クリーニングを場合によっては受けている方法に関する。
【0002】
本発明は、また、このような方法を実施するための処理ステーションも含む。
【背景技術】
【0003】
輸送および保管ポッドは、基板の輸送および使用環境から隔てられた、1つまたは複数の基板の輸送および保管のための大気圧下の密閉空間を構築する。
【0004】
半導体製造業では、これらのポッドは、あるデバイスから別のデバイスへと半導体ウエハもしくはレチクルなどの基板を輸送するために、または2つの製造ステージの間に基板を保管するために使用される。
【0005】
特に、ウエハを輸送/保管する前面開口式の一体型ポッド(FOUP:front opening unified pod)と、底面開口式の標準機械的インターフェース・ポッド(SMIFポッド(standard mechanical interface pods))、「オープン・カセット(open cassette)」ポッド、レチクルの輸送および保管のためのレチクルSMIFポッド(RSP:Reticle SMIF Pods)、太陽産業用の基板の輸送のためのポッドとが、区別される。
【0006】
これらの輸送ポッドは、ポリカーボネートなどの材料で作製されており、それらの材料は、場合によっては、輸送ポッドの製造および/またはそれらの使用の結果生じる可能性のある汚染物質、特に、有機物、塩基、アミン、酸、およびドーパント汚染物質(AMC)を濃縮するおそれがある。
【0007】
さらに、半導体の製造の間、輸送ポッドが取り扱われ、それが、輸送ポッドの壁内にとどまる汚濁粒子(pollutant particles)の形成をまねいて輸送ポッドを汚染する。その後、輸送ポッドの壁に付着している粒子は、ゆるんで、これらのポッド内に保管された基板上に落下し、それらを損傷するおそれがある。
【0008】
したがって、これらのポッドを脱イオン水などの液体で洗浄する、これらのポッドの定期的なクリーニングが計画される。5〜7分間続くこの洗浄ステージの後、例えば、輸送ポッドが赤外線によって加熱された高温空気の対流によって加熱され、遠心分離にかけられる段階、それに続く、輸送ポッドが開放空気中に放置される段階を含めた、はるかに長い乾燥ステージ(5〜8時間)が続く。
【0009】
クリーニング流体、より具体的には水蒸気の残留物は、除去する必要のある主要な汚染物質である。
【0010】
乾燥ステージの欠点は、それが十分に効果的ではないことである。
【0011】
輸送ポッドを構成する材料を損傷するのを回避し、また輸送ポッドが変形して自動機械用途に適さないものになるのを回避する必要があるので、対流によって加熱する空気の温度は、50℃に制限されている。その場合、そのような温度は、すべての残留液体を除去するには低すぎる。
【0012】
同様に、遠心分離処理された輸送ポッドの回転速度は、新しい汚染粒子を作り出さないように制限される。
【0013】
それゆえに、水残留物がポッドの壁内に捕捉されたままになる。
【0014】
乾燥は、また、矛盾したものであると記載しておく。
【0015】
輸送ポッドは、湿気および他の異物を捕捉する領域を形成する、接近困難な多くのデッド・エリアを含む、複雑なジオメトリを有する。
【0016】
さらに、輸送ポッドは、すべてが同じ製造プロセスから得られるわけではなく、特定のポッドが開放空気中で他のポッドよりも長い乾燥時間を必要とする場合がある。さらに、特定のポッド壁は新しいが、他のポッド壁は、すでに頻繁に取り扱われていて、より多孔質な表面を呈する。
【0017】
開放空気中に長時間置いた後でさえ、特定の輸送ポッドは、湿ったままである。
【0018】
さらに、開放空気中での乾燥は、輸送ポッドの数時間にわたる固定を必要とする。ポッドの壁の脱着流が十分に低い許容可能なレベルに達するには、平均して5〜8時間が必要とされる。
【0019】
したがって、製造業者らは、輸送ポッドが完全に乾燥するのを待つ間それらの輸送ポッドがその中で保管される大きな乾燥室の設置を計画する。
【0020】
同様に、輸送ポッドの大きなフリート(fleets)が必要とされる。
【0021】
雰囲気の清浄度、温度、湿度、および圧力を時々調節しなければならないこれらのクリーン・ルームの設置ならびにロジスティクス管理は、主要かつ高価な投資となる。
【0022】
さらに、ますます厳しくなる汚染基準により、製造業者らは、輸送ポッドのクリーニング頻度を高め、したがって、乾燥ステージの完了を待つ間それらの輸送ポッドの保管に必要なスペースをさらに増大させることを余儀なくされている。
【0023】
したがって、輸送ポッドなどの輸送支持具のより効果的かつ迅速なクリーニングを保証する必要がある。
【0024】
1つの困難は、輸送支持具の大部分を構成する材料が、一般に多孔質で、除去または阻止する必要のある異物を収容する傾向にあることである。
【0025】
他の困難は、輸送支持具が、汚濁粒子を発生させる危険のある接触クリーニングに対応していないことである。
【0026】
マイクロ波放射線が残留湿気を加熱してその除去を助ける可能性が検討された。しかし、この方法は、接地できない金属要素とRF波識別デバイスとを含む次世代の輸送支持具とともに使用することができない。
【0027】
他の制約は、輸送支持具の表面汚染を最小限に抑えなければならないことであり、一般に、輸送支持具の内側表面は、65nmよりも大きな粒子を含んでいてはならず、湿気を含んでいてはならず、干渉電荷を含んでいてはならない。
【発明の概要】
【発明が解決しようとする課題】
【0028】
したがって、本発明の目的は、輸送支持具の固定時間を短縮し、輸送支持具の壁の満足のいく清浄度を保証するために使用される、洗浄ステージ後の、異物、特に分子汚染化合物(AMC、VOC)および/または湿気の除去を大幅に改善かつ加速する、方法、ならびに輸送支持具用の処理ステーションを提案することである。
【0029】
実際には、本発明は、輸送支持具を劣化または変形させることなく、また干渉静電荷を生み出すことなく、10分足らずの処理を保証することを目的とする。
【課題を解決するための手段】
【0030】
この目的で、本発明は、輸送支持具上の処理されるべき表面から異物を除去するために、前記処理されるべき表面がその間に準大気圧(subatmospheric)のガス圧と赤外線との複合作用にさらされる処理ステージを含む、基板の運搬および保管のための輸送支持具を処理する方法を提案する。
【0031】
処理されるべき表面に作用する準大気圧のガス圧と赤外線とのこの複合作用のおかげで、異物の除去は、特に迅速かつ完全となり、輸送支持具を劣化または変形させることなく、必要な時間内に、換言すれば10分足らずでクリーンな輸送支持具にするという予期せぬ手段を提供する。
【0032】
約10分足らずという可能な限り短い処理時間に達するために、処理されるべき表面がさらされるガス圧を可能な限り低減することを目的とする。ただし、低すぎる圧力は、蒸発を加速させ、また同時に液体の温度を降下させるが、また、除去されるべき液体異物の凝固を回避することが不可欠であり、これは、そのような凝固が、これらの異物を除去するのにかかる時間を大幅に延長させ、処理の終わりを検出するのをほぼ不可能にして、得られるクリーニングの質が満足のいかないものになるからである。
【0033】
このような不都合な凝固を回避するために、本発明の方法の間、有利には、準大気圧が、除去されるべき液体異物の状態図の三重点の圧力よりも大きいままであることを保証することができる。
【0034】
同時に、除去されるべき異物をそれらの凝固を回避するのに十分に高い温度に置くために、赤外線の効率を高めるとともに、この温度を、それを超えると、例えば輸送支持具を自動機械用途に適さないものにする変形によって、または例えば輸送支持具を多孔質で汚濁の影響を受けやすいものにする材料の構造的変化によって輸送支持具が劣化するおそれのある、許容温度限界未満に維持することに関心がもたれる。
【0035】
この理由から、赤外線は、好ましくは、除去されるべき1つまたは複数の異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを有するべきである。
【0036】
好ましくは、赤外線は、処理されるべき表面を適切な温度に設定する初期の連続的ステージを含むことのできる断続的赤外線とすることができる。したがって、赤外線は、好ましくは除去されるべき水ベースの異物に作用を及ぼし、初期ステージは、適切な温度への設定を加速して処理時間を大幅に短縮するために使用される。さらに、これは、赤外発光スペクトルと、処理されるべき表面の温度とを別々に制御するために使用される。
【0037】
実際には、断続的な放射を実施するために、処理されるべき表面の温度を代表する試験温度を有利には測定することができ、前記試験温度にしたがって、処理されるべき表面の前記温度を最高許容温度閾値よりも低い温度設定の近傍で維持するように、赤外線を制御することができる。これによって、最高許容温度に可能な限り近づくことが可能となり、したがって、処理時間が短縮される。
【0038】
また、処理時間を短縮することを目的として圧力を可能な限り低く設定すると、準大気圧のガス圧を有利には測定し、圧力設定と比較して、その比較に応じて、準大気圧のガス圧を圧力設定あたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス、ガス流注入コンダクタンスなど、圧力を調節する手段を制御することができる。
【0039】
前述のように、異物を除去する際の困難の1つは、輸送支持具の複雑な形状にある。この複雑な形状は、異物がその中に蓄積し、したがって除去が非常に困難となるおそれのある、捕捉領域または陥凹部を含む。
【0040】
これらの陥凹領域から異物を除去する時間は、処理されるべき表面上の異物が捕捉された少なくとも1つの領域の近くに局所的なガス流が注入されるステージを可能にすることによって、さらに短縮することができる。局所的なガス流は、捕捉領域の汚濁要素の除去に寄与して、処理時間を大幅に短縮する。使用されるガスは、例えば、窒素またはヘリウムとすることができ、後者は、より効果的で、処理時間をさらに短縮できるようになる。
【0041】
処理の終わりに、処理されるべき表面が、その間に、除去されるべき異物を含まないクリーンなガス流の注入による周囲温度あたりへの温度の漸次降下と、それと同時の大気圧あたりへのガス圧の漸次増大とにさらされる、コンディショニング・ステージを有利には含めることができる。
【0042】
クリーンなガス流は、このステージの間、処理されるべき表面領域をクリーンなガス分子で飽和させるために使用され、それが、次いで、処理された表面が圧力上昇および冷却の間にスポンジ効果を通じて周囲雰囲気によって再び汚濁されるのを回避する。
【0043】
クリーンなガス流は、有利には、十分に低速で、例えば大気圧あたりで0.4m/s未満で選択されるべきであるが、高流量を可能にし、したがって干渉静電荷の生成および汚濁粒子の取込みを回避するために、広く分散すべきである。
【0044】
このような多量の、ただし低速のガス流によって、蒸気相は、液体残留物の近くで排出され、したがって、液体蒸気平衡がシフトし、それによって処理を加速させる。
【0045】
経済上および安全上の理由から、準大気圧プロセスの終わりに、窒素または空気が好ましくは使用されるべきである。
【0046】
有利な一実施形態によれば、処理されるべき表面からの異物の除去を代表するパラメータを測定することができ、処理は、その代表パラメータが参照値に達した後で中断される。
【0047】
このように、処理前に輸送支持具が呈した実際の条件に処理を適合させる、効果的な処理を保証することができる。
【0048】
例えば、代表パラメータは、輸送支持具の重量、または真空ポンプの出口のところの湿気もしくはAMCの量、または密封チャンバ内のガス圧とすることができる。
【0049】
他の態様によれば、本発明は、基板の運搬および保管のための輸送支持具処理ステーションであって、
処理されるべき表面をもつ少なくとも1つの輸送支持具を受けるのに適した、ポンピング・デバイスに連結するための密封チャンバと、
前記処理されるべき表面を赤外線にさらすのに適した少なくとも1つの赤外線源と、
前記処理されるべき表面を準大気圧のガス圧と赤外線との複合作用にさらす、ポンピング・デバイスおよび赤外線源を制御するのに適した制御デバイスとを含む、輸送支持具処理ステーションを計画する。
【0050】
このようなステーションは、以上で定義した方法を実施し、非常に短い処理時間と効果的な処理とを得るために使用される。
【0051】
好ましくは、処理ステーションは、密封チャンバ内に置かれた、処理されるべき表面の温度を代表する試験温度を測定するのに適した少なくとも1つの温度センサを含むべきである。
【0052】
したがって、処理されるべき表面の温度を常に知り、必要に応じてその温度を記憶して、劣化がないことを保証することが可能である。
【0053】
実際には、特定の一実施形態によれば、温度センサは、その一方の面が前記赤外線にさらされ、その反対側の面が温度プローブと接触している、処理されるべき輸送支持具を構成するのと類似の材料で作製された小さい厚さの試験層を含む。
【0054】
このように、温度センサは、密封チャンバ内に存在することができ、密封チャンバ内に輸送支持具を挿入するまたは密封チャンバ内の輸送支持具を除去するステージの間、その温度センサを移動するまたは配線する必要がない。
【0055】
試験層の温度は、原則として、処理されるべき表面の温度に非常に類似しており、試験層の厚さが小さいので、温度プローブは、処理されるべき表面の温度に非常に近い温度を測定することができる。
【0056】
好ましくは、制御デバイスは、温度センサによって生成される温度データを調べ、温度センサによって測定された温度が、それ自体が最高許容温度閾値を下回る温度設定よりも所定の差を超えて低いときには、赤外線源の電力供給をトリガし、温度センサによって測定された温度が所定の差を超えて前記温度設定を上回るときには赤外線源の電力供給を遮断する、赤外線制御プログラムを含むべきである。
【0057】
したがって、処理ステーションは、処理時間をさらに短縮するために、温度を最高許容温度閾値の可能な限り近くに維持するために使用される。
【0058】
赤外線源が、除去されるべき異物を含む処理されるべき表面領域、特に、凹形領域および他の捕捉領域を本質的に照射可能であることが有益である。
【0059】
したがって、実際には、赤外線源は、箱の形態の輸送支持具の内側に挿入するのに適した少なくとも1つの線源部分を含むことができる。こうして、処理時間が短縮される。
【0060】
やはり処理時間を短縮するために、初期ガス注入デバイスを、また、有利には、処理されるべき表面の近傍に第1の局所的なガス流を注入するように計画することができる。
【0061】
反対に、再加圧の間、注入されるガスが低速で分散した流れを生み出すことが好ましい。したがって、第2のガス注入デバイスは、有利には、処理されるべき表面から隔てられた密封チャンバにクリーンなガス流を注入するように計画することができる。
【0062】
有利な一実施形態によれば、処理ステーションは、処理されるべき表面からの異物の除去を代表するパラメータを測定するデバイスを含むことができ、また、制御デバイスが、代表パラメータが参照値に達するときには処理を中断するのに適したものとなるように、計画することができる。
【0063】
実際には、処理ステーションは、少なくとも1つの輸送支持具の重量を測定し、重量信号を生成することが可能となるように位置決めされた少なくとも1つの電子はかりと、重量信号を処理して前記重量信号から処理ステージの終わりを推定する手段とを含むことができる。
【0064】
はかりは、輸送支持具が前記はかりに力を加えるときに電磁補償を生み出すことができるように永久磁石の磁場内に置かれた少なくとも1つの補償巻線を含む、電気的フィードバック回路を含むことができる。
【0065】
代替形態として、処理ステーションは、有利には、ポンピング・デバイスの真空ポンプの出口のところの湿度および/もしくはAMCセンサ、ならびに/または密封チャンバの圧力計を含むこともできる。
【0066】
処理ステーションは、別々にまたは組み合わせて採用できる、他の特徴、特に、以下の特徴を有することができる:
チャンバの閉位置でガスケットを圧迫するのに適した少なくとも1つのシリンダを含む、チャンバの密閉カバーとは反対側でチャンバの開口部の周辺に置かれたガスケット、
前記ステーションのフレームの下面と床との間に置かれた、振動を減衰させるデバイス、
チャンバに連結された誘導励起セルを含み、前記セルの内側にプラズマを形成するのに適した電磁励起アンテナを含む、ガス種のための制御デバイス。
【0067】
処理ステーションは、さらに、輸送支持具を液体でクリーニングする機器に連結することができ、前記クリーニング機器は、当該クリーニング機器から前記処理ステーションへと輸送支持具を運ぶためのデバイスを含む。
【0068】
本発明は、また、真空ポンプと前述のような少なくとも1つの処理ステーションとを含む処理機器に適用される。
【0069】
他の利点および特徴は、添付図面に関連して作成された本発明の説明を読めば明らかになる。
【図面の簡単な説明】
【0070】
【図1】本発明の一実施形態による方法の様々なステージを示すフローチャートである。
【図2】本発明の一実施形態による、開位置の処理ステーションの側面斜視図である。
【図3】図2の処理ステーションの概観図である。
【図4】真空内に置いたときの時間による輸送支持具の測定重量の漸進的変化を表すグラフである。
【図5】水の状態図である。
【図6】水による赤外線吸収についての曲線を示す図である。
【図7】本発明の一実施形態による温度センサの正面図である。
【図8】本発明の一実施形態による温度センサの背面図である。
【図9】本発明の一実施形態による温度センサの断面図である。
【図10】図7〜9の温度センサの動作を図式的に示す図である。
【図11】当該方法の間の赤外線、温度、および圧力の変動を示す時間図である。
【発明を実施するための形態】
【0071】
これらの添付図では、同一の要素には同じ参照番号が与えられている。
【0072】
明瞭にするために、当該方法の諸ステージには、100から始まる番号が付けられており、ステーションの諸要素には、1〜60の番号が付けられている。
【0073】
図1は、基板の運搬および保管のための輸送支持具の処理方法のフローチャート(破線の長方形100の内側)を示す。
【0074】
この方法は、例えば、図1に示されるステージ101にしたがって、脱イオン水による洗浄など、予め液体によるクリーニングを受けていることのある、図2に示される輸送支持具1に適用される。
【0075】
輸送支持具1は、半導体ウエハ、レチクル、太陽産業用の薄膜などの基板の運搬および大気中保管のための手段である。
【0076】
例えば、輸送支持具1は、輸送ポッドのケーシング2、ポッド扉3、および/または輸送ポッド自体である。輸送ポッドは、特に、タイプFOUP、SMIFポッド、RSPもしくは「オープン・カセット」の一体型輸送ポッド、または太陽センサ用の基板のための輸送ポッドとすることができる。
【0077】
本発明による方法は、その間に輸送支持具1が真空ポンプ5に連結された密封チャンバ4内に置かれ(ステージ102)、輸送支持具1の処理されるべき表面1aが真空ポンプ5を通じた準大気圧のガス圧PSA(ステージ103)と赤外線IRとの複合作用にさらされる、図3および10に示される処理ステージを含むことを特徴とする。
【0078】
壁の処理によって、わずか約10分後の満足のいくレベルまでの乾燥と、壁の脱ガス(degassing)の最適化との両方が可能になる。
【0079】
輸送支持具1のこの処理は、乾燥および脱着を通じて、特に水などのクリーニング剤の液体残留物およびそれらの蒸気の形態、ときには特定の固体残留物までをも、除去することを目的とする。
【0080】
さらに、従来技術の方法とは異なり、それについての脱着流のレベル、したがって乾燥のレベルを、ある支持具から別の支持具へと完全に再現可能である輸送支持具を得るために、当該方法が使用されることが観察される。
【0081】
従来技術の乾燥方法では、第1に、残留水蒸気は、輸送支持具1のデッド・エリア内にとどまったままになるおそれがあり、第2に、脱ガス・レベルは、輸送支持具の履歴に依存した。
【0082】
したがって、当該方法の再現性は、液体クリーニングに続く同じ処理方法の後で輸送支持具1が同じ清浄度レベルを有することを保証するために使用される。
【0083】
例えば、輸送支持具1は、それについての準大気圧PSAが1000mbar未満、好ましくは約100mbarまたは約10mbarである1次真空にさらされ、準大気圧PSAが除去されるべき異物の状態図の三重点の圧力PTよりも高いままであることが観察される。例えば、除去されるべき異物が水の場合、三重点の圧力PTは、6mbarである(図5参照)。
【0084】
処理されるべき表面1a上の水などの液体異物の除去後、輸送支持具1の壁の脱ガス流をさらに低いレベルまで除去するために、輸送支持具1を、それについての準大気圧が0.1mbar未満、好ましくは約0.001mbarである2次真空にさらすことができる。
【0085】
したがって、例えば、輸送支持具1を1次ポンピングにさらし始め、次いで、必要とされる乾燥レベルが得られたときには2次ポンピングに切り替えるように計画することができる。
【0086】
当該方法によれば、輸送支持具1は、準大気圧PSAにさらされながら、赤外線IRによって加熱される。
【0087】
輸送支持具1は、赤外線IRによって予め定められた温度まで加熱される。
【0088】
赤外線IRから放出される出力は、輸送支持具1材料の最高許容温度TAを超えるのを回避するように、輸送支持具1材料の温度TMを測定することによって制御される。
【0089】
図11は、赤外線加熱プロセスについての好ましい実施形態を示す。この場合、赤外線IRは、断続的である。それは、有利には、処理されるべき表面1aを適切な温度に設定する連続的な初期ステージE1を含む。次いで、赤外線IRは、材料の温度TMを温度設定TCあたりで維持するために、満足のいく継続時間にわたって交互に切断/回復される。同時に、断続的な赤外線を可能にすることによって、赤外線発生デバイスの波長スペクトルを制御しながら処理されるべき表面1aの温度を制御できるようになる。
【0090】
赤外線放出が連続的である初期ステージE1の間に、材料の温度TMは、温度設定TCに達するまで急速に上昇する。次いで、温度TMは、それ自体が最高許容温度閾値TAよりも低い、温度設定TCあたりで維持される。
【0091】
実際には、処理されるべき表面1aの温度TMを代表する試験温度が測定され、赤外線IRは、前記試験温度にしたがって制御され、温度TMが、所定の差だけ、例えば1度、温度設定TCを超えるときには、赤外線IRは、遮断される。次いで、温度TMが、所定の差だけ、例えば1度、温度設定TC未満に降下するときには、赤外線は、回復される。その結果、図11の時間図に示される温度TM曲線が得られる。
【0092】
さらに、赤外線IR波長発光スペクトルは、輸送支持具1の表面上および輸送支持具1の材料の内側の第1の層内で加熱が起こるような形で、好ましくは除去されるべき液体異物上で加熱が起こるような形で選択することができる。したがって、約3μmの波長が、水を除去するのに有利である。
【0093】
また、除去されるべき2以上のタイプの元素によって選択的に吸収されやすい2以上の異なる波長に対して赤外線を作用させるように選択することも可能である。
【0094】
実際には、赤外線IRは、有利には、除去されるべき1つまたは複数の異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを有することができる。
【0095】
温度設定TCは、有利には周囲温度よりも高く、好ましくは約50℃である。
【0096】
準大気圧PSAが可能な限り低く、ただし、除去されるべき物体の三重点の圧力PTよりも永久的に高いままであることが不可欠であり、さもなければ、除去されるべき液体物体が固体化するおそれがあり、それらの除去が非常に低速になる。この理由から、ガス圧PSAを有利には密封チャンバ4の内側で測定し、圧力設定PCと比較して、その比較に応じて、準大気圧のガス圧PSAを圧力設定PCあたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス46、ガス流注入コンダクタンス18など、圧力を調節する手段を制御することができる。
【0097】
輸送支持具1の処理されるべき表面1a上の異物の捕捉領域の近くに局所的なガス流47を注入することによって、処理の大幅な加速が得られると記載した。そのような局所的なガス流47(図10)は、処理されるべき表面1aの近傍での分子および粒子の取込みに有利にはたらく。
【0098】
好ましくは、処理されるべき表面1aを不動態化(passivates)する、密封チャンバ4を大気圧に設定するために使用できるクリーンなガスの吸収に、冷却が有利にはたらくので、周囲温度および大気圧の近傍への復帰が行われて、輸送支持具1を密封チャンバ4の内側で維持する。
【0099】
実際には、処理されるべき表面1aが、その間に、大気圧Paあたりへのガス圧PSAの漸次上昇と、除去されるべき異物を含まないクリーンなガス流48の注入による周囲温度Taあたりへの温度TMの降下とにさらされる、コンディショニング・ステージECを有利には計画することができる(図11)。クリーンなガス流48(図10)は、局所的ではなく、換言すれば、密封チャンバ4内に分散しなければならない。クリーンなガス流48は、十分に低速で選択され、高流量を可能にして干渉静電荷の生成および処理されるべき表面1a上の汚濁粒子の取込みを回避するために、広く分散される。
【0100】
処理に必要な時間は、好ましくは同じ事前の洗浄ステージを受けた同じタイプのポッドとおおむね同等になると考えることができる。この場合、処理は、輸送支持具1のタイプに特徴的な予め定められた継続時間の後で中断することができ、それから輸送支持具1が準大気圧にさらされる。
【0101】
図1のフローチャートに示される有利な一変形形態によれば、輸送支持具1の処理されるべき表面1aからの異物の除去に特徴的なパラメータが測定され(ステージ104)、このパラメータの漸進的変化(evolution)は、輸送支持具1のタイプを考慮に入れた参照、換言すれば、参照値または参照曲線と比較される(ステージ105)。
【0102】
参照は、輸送支持具1の満足のいくレベルの脱着に、したがって乾燥に特徴的であり、処理は、代表パラメータが参照に達するときには中断することができる。
【0103】
各タイプの輸送支持具1は、サイズ、材料、構造、ジオメトリなど、1組の物理的パラメータによって特徴付けることができる。具体的には、一体型タイプのポッド、例えば、FOUPタイプ・ポッド、SMIFポッド、RSPもしくは「オープン・カセット」タイプ・ポッド、または太陽センサ用の基板のための輸送ポッドがある。
【0104】
次いで、測定パラメータが参照以下になったら可能な限り早く密封チャンバ4内の圧力が大気圧へと増大するように計画することができる。
【0105】
大気圧Paは、クリーン・ルームの気圧など、輸送支持具1の使用環境内でのそれらの輸送支持具1の圧力である。
【0106】
測定されたパラメータが参照以下になるときには、脱着流のレベルは、十分に低いレベルに達している。
【0107】
この場合、密封チャンバ4内の圧力を高め、輸送支持具1を除去する(ステージ106)か、または、再使用されるのを待つもしくは密封チャンバ4内のスペースを確保するのを待つ間、輸送支持具1がその壁を脱着させ続けるように、輸送支持具1を真空内で保管する(ステージ107)か、選択することができる。
【0108】
1つの可能性によれば、特徴的なパラメータは、密封チャンバ4内のガスの全圧または分圧である。
【0109】
ポンピングの限界真空状態での全圧の測定は、主に、処理されるべき輸送支持具1の脱ガスによって生じる、密封チャンバ4内の脱着流の指標である。
【0110】
この測定方法は、高流量のガス(数sccm程度)にはきわめて効果的である。しかし、脱着流が比較的低流量(数sccm未満)であるときには、この測定技術は、確度に欠けることがある。
【0111】
さらに、ガス流47が密封チャンバ4に注入されるときには、脱着流の信号は、注入された流れの信号とともに消えることがある。
【0112】
また、当該方法が、その間にパージ・ガスが密封チャンバ4に導入されるパージ・ガス充填操作と、その間にパージ・ガスと初期ガスとの混合物がポンピングによって密封チャンバ4から抜き出されるパージ・ガス・ポンピング操作とを含む、追加のパージ・ステージを含むことが可能である。
【0113】
他の可能性によれば、特徴的なパラメータは、輸送支持具1の測定重量である。
【0114】
重量の値は、異物の除去とともに、また輸送支持具1の壁の脱ガス流とともに変化する。
【0115】
測定は、好ましくは、輸送支持具1が経験する浮力および密封チャンバ4内の流れの運動に例えば起因した、測定の擾乱を回避するために、真空ポンプ5の定常状態から開始することができる。
【0116】
図4は、縦軸に重量Pがグラムで与えられ、横軸に時間Tが時間、分、秒で与えられるグラフである。曲線150は、密封チャンバ4が真空内に置かれたときの時間による輸送支持具1の測定重量を表す。
【0117】
支持具1の重量が時間の増加とともに減少することに留意する。輸送支持具1の壁は、真空中で脱ガスする。重量測定は、したがって、輸送支持具1の処理レベルの良好な指標である。
【0118】
他の可能性によれば、参照は、真空ポンプ5の出口における湿気またはAMCの量とすることができる。
【0119】
有利には、参照は、特徴的なパラメータの予め定められた時間変動とすることができる。
【0120】
したがって、圧力または測定重量の時間変動が低くなりすぎるときには、時間による脱着流は、もはや、輸送支持具1を真空内に保つことを正当化するのに十分に高くない場合がある。
【0121】
あるいは、参照は、予め定められた閾値とすることもできる。
【0122】
本発明による処理方法の効率を説明するために、密封チャンバ4内に置かれ、当該方法の様々な作用にさらされた被試験片に試験を実施した。
【0123】
すべての事例で、赤外線IRを被試験片上で使用した。
【0124】
処理の速度を、大気圧の第1の事例と、水の三重点に近い圧力(10mbar)の第2の事例との間で比較し、速度ゲインは、三重点に近い圧力の場合に67%であった。
【0125】
氷の形成をまねく過度に低い圧力(6mbar)と、全乾燥時間にわたって氷の形成が起こらないことを保証する適正な圧力(6.7mbar)とを比較することによって、圧力の適正な維持の重要性について試験を実施した。速度ゲインは、57%であった。次いで、同じ50mbarの圧力について、圧力の維持を保証するためにガス流を挿入する効果を調査した。ガス流の挿入によって、ガス流なしの処理と比較して13%の速度ゲインが可能となった。
【0126】
次いで、挿入されたガス流に対する処理されるべき表面1aの位置決めの効果を調査した。処理されるべき表面1aを注入されたガス流の経路内に位置決めすることによって、19%の速度ゲインを得られることがわかった。
【0127】
また、注入されたガスの性質の効果も調査した。ヘリウムを使用すると、同じ条件で窒素の注入に比較して22%の速度ゲインが得られた。
【0128】
さらに、FOUPタイプの輸送支持具に試験を実施して、処理後の輸送支持具の残りの脱ガスを測定した:
a)1時間にわたって大気圧Paで赤外線(50℃)によって加熱した後、残りの脱ガスは、2.5sccmであった。
b)追加加熱なしに1時間にわたって真空内に置いた後、残りの脱ガスは、0.77sccmであった。
c)1時間にわたって赤外線(50℃)によって追加加熱しながら真空内に置いた後、残りの脱ガスは、0.6sccmであった。
【0129】
これは、真空と赤外線との組合せの相乗効果を示す。
【0130】
本発明によれば、図2に示されるように、処理ステーション10が、また、輸送支持具1のために、基板の運搬および大気中保管のために、前述の処理方法の実施のために、計画される。
【0131】
ステーション10は、好ましくはフレーム7上に据え付けられた少なくとも1つの密封チャンバ4を含む。
【0132】
処理ステーション10の密封チャンバ4は、真空ポンプ5ポンピング・デバイス(図3参照)に連結するためのものであり、処理されるべき表面を備えた、基板のための輸送ポッドなど、少なくとも1つの輸送支持具1を受けるのに適している。
【0133】
処理ステーション10は、輸送支持具1の処理されるべき表面1aを赤外線IRにさらすのに適した、少なくとも1つの赤外線源49を含む。
【0134】
図2は、処理ステーション10が4つのFOUPタイプの輸送ポッドを受ける様子を示す。
【0135】
第1の変形形態によれば、真空ポンプ5は、1次真空ポンプである。
【0136】
あるいは、真空ポンプ5は、1次真空ポンプに連結するための導管と、処理方法を実施するときに1次ポンピングから2次ポンピングへと切り替えることができるように、2次ポンプに連結するための、1次真空ポンプの上流の導管の分岐とを含むこともできる。
【0137】
密封チャンバ4は、好ましくは円筒形で、真空内に置かれるのに耐えるようにステンレス鋼で作製される。密封チャンバ4は、また、有利にはヒンジ13(図2)上に据え付けられた、密閉カバー11によって塞ぐことのできる開口部9を含む。
【0138】
密閉カバー11は、有利には、前面14上に、輸送支持具1が内側に存在するかどうかを操作者が点検できるようにする、例えばガラス製の少なくとも1つの窓15を含む。
【0139】
窓15は、有利には、各輸送支持具1の高さのところに計画される。
【0140】
さらに、密閉カバー11の前面14は、有利には、処理ステーション10の動作状態を信号で伝えるタワー16と、処理ステーション10のCPU17(図3)に接続された表示画面(見られない)とを含む。
【0141】
図3および10からわかるように、密封チャンバ4は、輸送支持具1の処理後に密封チャンバ4を大気圧に設定するために、乾燥窒素を導入する手段など、クリーンなガスを導入する手段60を含む。
【0142】
輸送支持具1が輸送ポッドであるときには、有利には、ポッドを真空内に置くときにポッドの壁を変形させないように、輸送ポッドを開いた状態で密封チャンバ4内に置くことができる。
【0143】
このために、処理ステーション10は、例えば、各輸送支持具1を支持するための棚23、25を含む。
【0144】
図2からわかるように、処理ステーション10は、好ましくは、ポッドのケーシング2がその上に置かれる第1の組の棚23に加えて、対応する扉3がその上に置かれる第2の組の棚25を含むべきである。
【0145】
有利には、第2の組の棚25は、密閉カバー11の内側陥凹部27内で扉3を垂直位置で支持する。
【0146】
第2の組の棚25の棚は、また、その下に置かれたポッドの扉3を保持するための係止タブ29を含む。
【0147】
寸法を制限し、輸送支持具1への接近を簡単にするために、処理ステーション10が、密封チャンバ4の固定部分内の支持具1の最もかさばる部分と、密閉カバー11の陥凹部27内の第2の部分とを受けるのに適したものとなるように計画される。
【0148】
密封チャンバ4は、また、密閉カバー11が閉位置(図示せず)にあるときに密封チャンバ4を封止するように開口部9の周辺に置かれた扉ガスケット31を含む。
【0149】
また、密封チャンバ4の閉位置で扉ガスケット31を圧迫できるように、処理ステーション10が、密封チャンバ4のヒンジ13の関節上に据え付けられた好ましくは空気圧式の少なくとも1つのシリンダ33を含むように計画される。
【0150】
開口部9上の密閉カバー11の案内をさらに改善するために、処理ステーション10のヒンジ13の長さに沿って均一に散在した、いくつかのシリンダ33が計画される。
【0151】
図2に示されるように、ヒンジ13の3つの関節上に配置された3つのシリンダ33が好ましい。
【0152】
扉ガスケット31の均質な圧縮を保証するために、第1に、好ましくはカバー11に連結されたピン37と、第2に、扉ガスケット31の外側で密封チャンバ4の開口部9の周辺に置かれた対応する穴39とからなる、少なくとも1つのガイド35がまた計画される。
【0153】
好ましくは、シリンダ33とおおむね同じ高さで、ヒンジ13を含む側部とは反対側の密封チャンバ4の開口部9の側部に沿って均一に散在した、ヒンジ関節と同数のガイド35が存在すべきである。
【0154】
したがって、密封チャンバ4を閉じるときには、密閉カバー11は、初めに、密封チャンバ4の開口部9上のピン37によって案内され、心合わせされる。
【0155】
適所に置かれたら、次に、シリンダ33の作動を使用して、密閉カバー11を開口部9に押し付けて固定し、したがって、扉ガスケット31を圧迫して、チャンバ4を封止する。
【0156】
この配置は、ヒンジ13の位置で扉ガスケット31に作用するせん断拘束を制限するために使用される。
【0157】
あるいは、密閉カバー11を密封チャンバ4の開口部9上に心合わせするために、密封チャンバ4の開口部9の縁部上におおむね対称的に置かれた、密閉カバー11の少なくとも2つのガイド35を有することが計画される。
【0158】
この代替的な実施形態では、また、単純に密封チャンバ4を真空内に置くことによって扉ガスケット31を圧迫できるように寸法設定されたポンプ5を有することも計画される。
【0159】
図3および10では、処理ステーション10は、また、第1に、ポンピング・デバイスを使用して密封チャンバ4を準大気圧(PSA)に置くことを管理するために、第2に、赤外線源49を制御するために、CPU17を備えた制御デバイスを含む。このように、処理ステーション10は、処理されるべき表面1aを準大気圧のガス圧と赤外線IRとの複合作用にさらすのに適している。
【0160】
赤外線源49の制御のために、図10に示されるように、有利には、密封チャンバ4内に置かれた、処理されるべき表面1aの温度TMを代表する試験温度を測定するのに適した少なくとも1つの温度センサ50が存在する。温度センサ50は、密封チャンバ4に接続され、処理されるべき表面1aに類似した形で赤外線源49からくる赤外線IRを受け取る領域内に置かれる。赤外線IRの作用が、温度センサ50上に、処理されるべき表面1aが経験する温度上昇に類似した温度上昇を生み出すことが保証される。
【0161】
実際には、温度センサ50は、図7〜9に示されるように作り出すことができ、温度センサは、それを密封チャンバ4の壁に取り付ける位置決め穴51および52を備え、また温度プローブ54を挿入する止まり穴53を備えた、処理されるべき輸送支持具1を構成する材料に類似の材料、例えば、炭素負荷PEEK(carbon loaded PEEK)の、長さ約60mm、幅約20mm、厚さ約8mmのおおむね平行平面板とすることができる。
【0162】
止まり穴53は、その一方の面56が赤外線IRにさらされ、その反対側の面が温度プローブ54と接触している、小さい厚さe(約10分の1または10分の2ミリメートル)の試験層55によって塞がれる。試験層55の小さい厚さeは、温度センサ50の低い熱慣性および良好な反応性を保証するために使用される。
【0163】
実際には、CPU制御デバイス17は、温度センサ50によって生成される温度データを調べ、温度センサ50によって測定された温度が、それ自体が許容温度閾値TAを下回る温度設定TCよりも所定の差を超えて低いときには、赤外線源49の電力供給をトリガし、温度センサ50によって測定された温度が所定の差を超えて前記温度設定TCを上回るときには赤外線源49の電力供給を遮断する、赤外線制御プログラムを含む。
【0164】
図10に示される実施形態では、輸送支持具1は、中空の輸送箱型要素である。この場合、赤外線源49は、有利には、箱の形態の輸送支持具1の内側に挿入するのに適した少なくとも1つの赤外線源部分49aを含む。したがって、赤外線源49は、除去されるべき異物を捕捉しやすい凹形箱領域の可能な限り近くにあり、存在しうる影の領域が縮小される。
【0165】
さらに図10に示された実施形態では、処理ステーションは、また、処理されるべき表面1aの近傍で第1の局所的なガス流47を生み出すために、初期ガス注入デバイス18を含む。この第1の局所的なガス流47は、処理の間、密封チャンバ4内のガス圧PSAを維持するための手段として使用することができる。この場合、CPUは、初期ガス注入デバイス18によって保証されるガス流量を管理することができる。
【0166】
ただし、コンディショニング・ステージECでは、第2のガス注入デバイス60が、処理されるべき表面1aから隔てられた密封チャンバ4にクリーンなガス流48を注入するように計画される。
【0167】
さらに、CPU17は、処理の進行に特徴的なパラメータを点検するために使用されるセンサに接続することができる。これらのセンサは、密封チャンバ4の圧力計45(図3)、ならびに/またははかり41、ならびに/または真空ポンプ5の出口のところの湿度および/もしくはAMCセンサ57(図10)とすることができる。
【0168】
圧力測定の代わりに、または圧力測定に加えて、弁を通じて真空ポンプ5の導管に連結できる、または密封チャンバ4に直接連結できる誘導励起セルを含む、ガス種のための制御デバイス(図示せず)を、また、密封チャンバ4のガスと連通するように使用することもできる。
【0169】
ガス種のための制御デバイスは、また、セルの内側にプラズマを形成するような形でこのセルの周りに置かれた、発電機によって電力供給される電磁励起アンテナを含む。
【0170】
次いで、プラズマによって放出される光放射線は、検出され、光学的分光計に送られる。放出は、光ファイバによって、または適合コネクタによって実施することができる。光学的分光計は、検出された光学スペクトルの画像を生成し、それらを例えばCPU17に送る。
【0171】
有利には、また、ステーション10が完全に自動運転できるようにするために、CPU17は、バーコード読取装置、RFID読取装置(変換器)、受信器など、輸送支持具1を識別する手段を含むことができる。
【0172】
本発明の他の特定の実施形態によれば、ステーション10は、少なくとも1つの輸送支持具1の測定された重量の漸進的変化を測定できるように位置決めされた、少なくとも1つの電子はかり41を含む。
【0173】
重量の測定は、輸送支持具1の壁の脱ガス流と相関させることができ、したがって、それらの乾燥の進展を決定できるようになる。
【0174】
測定が有意であるためには、測定の確度は、有利には、数キログラム(FOUPタイプの輸送ポッドでは約4kg、RSPタイプのポッドでは約700g)のフル・スケールについて、約100分の1グラムである。
【0175】
また、外部環境に起因した干渉を制限するために、処理ステーション10が、ステーションのフレーム7の下面と床との間、好ましくはステーション10の足部44の下に置かれた振動を減衰させる手段(図示せず)を含むように計画される。
【0176】
ステーション10がいくつかの輸送支持具1を含むのに適している場合、また、コストを制限するために、輸送支持具1の乾燥の進展は、単一の輸送支持具1を点検することによって決定される。
【0177】
複数の輸送支持具1が同じタイプのもので、同じ事前クリーニング・ステージから得られる場合には、輸送支持具1の測定の結果得られる情報をこれらのすべての輸送支持具1の乾燥の進展に適用できると見なすことができる。
【0178】
したがって、図2に示されるように、処理ステーション10は、FOUPタイプ輸送箱の1つのケーシング2をそれぞれが受けるための、例えば3つの棚または固定式プラットフォーム23を含み、またさらに、FOUPタイプ輸送箱の第4のケーシング2の重量を測定するのに適した、可動式プラットフォーム43の下のはかり41を含む。
【0179】
有利には、はかり41は、輸送支持具1がはかり41に力を加えるときに電磁補償を生み出すことができるように永久磁石の磁場内に置かれた少なくとも1つの補償巻線を含む電気的フィードバック回路を含む。
【0180】
ゼロを読み取った後、はかり41の釣り合いに必要な補償力は、プラットフォーム43に加わる重量に比例しており、したがって、電流の強度は、重量に変換される。
【0181】
一変形実施形態によれば、処理ステーション10は、輸送支持具の洗浄機器(図示せず)に連結される。
【0182】
この変形形態では、ステーション10および/または機器が、洗浄機器から処理ステーション10の密封チャンバ4へと輸送するための、輸送支持具1を運搬する手段を含むように計画される。
【0183】
例えば、運搬手段は、輸送支持具1のための取扱ロボット、またはコンベヤ・ベルトである。
【0184】
また、1つまたは複数の処理ステーション10と洗浄機器(図示せず)との間に移送チャンバが存在してもよい。
【0185】
また、真空ポンプ5と、好ましくは単一のFOUPタイプ輸送支持具1を受けるのに適した少なくとも1つの処理ステーションとを含む、処理機器が存在してもよい。
【0186】
したがって、操作に際しては、処理ステーション10は、洗浄ステージ後に処理方法を実施するのに適している。
【0187】
カバー11を使用して閉じられた密封チャンバ4内に輸送支持具1を置くことから始める。
【0188】
次いで、ポンプ5を使用して、密封チャンバ4内に含まれるガスを排出し、赤外線IRを発生させる。
【0189】
ポンピングによるガスの排出、および赤外線IRは、有利には、除湿の進行に特徴的なパラメータの漸進的変化と参照とを比較した結果に応じて停止させることができる。
【0190】
次いで、輸送支持具1を冷ましておき、第2のガス導入デバイス60を通じたクリーンなガスの導入を通じて、密封チャンバ4の圧力を大気圧まで上昇させ、次いで、密閉カバー11を開けて輸送支持具1を密封チャンバ4から取り除く。
【0191】
他の実施形態によれば、処理ステーション10は、また、真空処理ステージの前に輸送支持具1を密封チャンバ4自体内で直接洗浄できるようにする、流出(run−off)手段59を備えた固定式または可動式ジェットなどの洗浄デバイス58を含むことができる。こうして、取扱デバイスの使用は、それに付随した再汚染の危険とともに回避される。全体的な処理時間は、短縮される。処理の有効性は、また、同時の除染と洗浄デバイス自体の制御とを通じて高められる。これは、また、コストを削減し、スペースを節約する。
【0192】
輸送支持具の本発明による処理方法を通じて、また、当該方法を実施する本発明による処理ステーションの使用を通じて、輸送支持具1は、真空内に置かれ、処理されるべきその表面1aは、選択的に加熱される。これは、輸送支持具1の壁の上、特に、支持具の材料の第1の層内の液体の蒸発に有利にはたらき、したがって、異物の除去のための処理を加速させる。
【0193】
本発明は、明確に記載した諸実施形態だけに限定されず、むしろ、当業者が実現可能な範囲内のいずれの変形形態および一般化形態も含む。
【特許請求の範囲】
【請求項1】
基板の運搬および保管のための輸送支持具(1)の処理方法であって、
前記輸送支持具(1)上の処理されるべき表面(1a)から異物を除去するために前記処理されるべき表面(1a)がその間に準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらされる処理ステージを含み、前記赤外線は断続的赤外線であり、最高許容温度を超えない温度設定あたりで材料の温度を維持するために、満足のいく継続時間にわたって交互に切断/回復されることを特徴とする、方法。
【請求項2】
前記準大気圧(PSA)が、除去されるべき前記異物の状態図の三重点の圧力(PT)よりも大きいことを特徴とする、請求項1に記載の方法。
【請求項3】
前記赤外線(IR)が、除去されるべき1つまたは複数の前記異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを呈することを特徴とする、請求項1または2のいずれか1項に記載の方法。
【請求項4】
前記赤外線(IR)が断続的赤外線であることを特徴とする、請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記断続的赤外線(IR)が前記処理されるべき表面(1a)を適切な温度に設定する連続的な初期ステージ(E1)を含むことを特徴とする、請求項4に記載の方法。
【請求項6】
前記処理されるべき表面(1a)の温度(TM)を代表する試験温度が測定され、前記赤外線(IR)が、前記試験温度にしたがって、前記処理されるべき表面の前記温度(TM)を最高許容温度閾値(TA)よりも低い温度設定(TC)あたりで維持するように制御されることを特徴とする、請求項4または5のいずれか1項に記載の方法。
【請求項7】
前記準大気圧のガス圧(PSA)が測定され、圧力設定(PC)と比較されて、その比較に応じて、前記準大気圧のガス圧(PSA)を前記圧力設定(PC)あたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス、ガス流注入コンダクタンスなど、圧力を調節する手段を制御することを特徴とする、請求項1乃至6のいずれか1項に記載の方法。
【請求項8】
前記処理されるべき表面(1a)上の少なくとも1つの異物捕捉領域の近くに局所的なガス流(47)がその間に注入されるステージを含むことを特徴とする、請求項1乃至7のいずれか1項に記載の方法。
【請求項9】
前記処理されるべき表面(1a)が、その間に、除去されるべき異物を含まないクリーンなガス流(48)の注入による大気圧(Pa)あたりへのガス圧(PSA)の漸次上昇と周囲温度(Ta)あたりへの温度(TM)の降下とにさらされる、コンディショニング・ステージ(EC)を含むことを特徴とする、請求項1乃至8のいずれか1項に記載の方法。
【請求項10】
前記クリーンなガス流(48)が、十分に低速で選択され、ただし、高流量を可能にし、したがって干渉静電荷の生成および汚濁粒子の取込みを回避するために、広く分散されることを特徴とする、請求項9に記載の方法。
【請求項11】
前記処理されるべき表面(1a)からの前記異物の除去を代表するパラメータ(前記輸送支持具の重量、真空ポンプの出口のところの湿気またはAMCの量、前記密封チャンバ内の分圧または全圧)が測定され、前記代表パラメータが参照に達するときには前記処理が中断されることを特徴とする、請求項1乃至10のいずれか1項に記載の方法。
【請求項12】
基板の運搬および保管のための輸送支持具(1)のための処理ステーション(10)であって、
処理されるべき表面(1a)をもつ少なくとも1つの輸送支持具(1)を受けるのに適した、ポンピング・デバイス(5、46)に連結するための密封チャンバ(4)と、
前記処理されるべき表面(1a)を赤外線(IR)にさらすのに適した少なくとも1つの赤外線源(49)と、
前記処理されるべき表面(1a)を準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらす、前記ポンピング・デバイス(5、46)および前記赤外線源(49)を制御するのに適した制御デバイス(17)とを含み、
前記制御デバイスが、材料の温度を最高許容温度を超えない温度設定あたりで維持するために、満足のいく継続時間にわたって交互に切断/回復される断続的赤外線手段を有することを特徴とする、処理ステーション(10)。
【請求項13】
前記密封チャンバ(4)内に置かれた、前記処理されるべき表面(1a)の温度(TM)を代表する試験温度を測定するのに適した少なくとも1つの温度センサ(50)を含むことを特徴とする、請求項12に記載の処理ステーション。
【請求項14】
前記温度センサ(50)が、その一方の面(56)が前記赤外線(IR)にさらされ、その反対側の面が温度プローブ(54)と接触している、処理されるべき前記輸送支持具(1)を構成するのと類似の材料で作製された小さい厚さ(e)の試験層(55)を含むことを特徴とする、請求項13に記載の処理ステーション。
【請求項15】
前記制御デバイス(17)が、前記温度センサ(50)によって生成される温度データを調べ、前記温度センサ(50)によって測定された温度が、それ自体が最高許容温度閾値(TA)を下回る温度設定(TC)よりも所定の差を超えて低いときには、前記赤外線源(49)の電力供給をトリガし、前記温度センサ(50)によって測定された温度が所定の差を超えて前記温度設定(TC)を上回るときには前記赤外線源(49)の電力供給を遮断する、赤外線制御プログラムを含むことを特徴とする、請求項13または14のいずれか1項に記載の処理ステーション。
【請求項16】
前記赤外線源(49)が、箱の形態の輸送支持具(1)の内側に挿入するのに適した少なくとも1つの線源部分(49a)を含むことを特徴とする、請求項12乃至15のいずれか1項に記載の処理ステーション。
【請求項17】
前記処理されるべき表面(1a)の近傍に第1の局所的なガス流(47)を注入するために初期ガス注入デバイス(18)を含むことを特徴とする、請求項12乃至16のいずれか1項に記載の処理ステーション。
【請求項18】
前記処理されるべき表面(1a)から隔てられた前記密封チャンバ(4)にクリーンなガス流(48)を注入するために第2のガス注入デバイス(60)を含むことを特徴とする、請求項12乃至17のいずれか1項に記載の処理ステーション。
【請求項19】
前記処理ステーションが、前記処理されるべき表面(1a)からの異物の除去を代表するパラメータを測定する手段(41、45、17)を含んでおり、前記制御デバイス(17)が、前記代表パラメータが参照値に達するときには前記処理を中断するのに適していることを特徴とする、請求項12乃至18のいずれか1項に記載の処理ステーション。
【請求項20】
代表パラメータのための前記測定デバイスが、
輸送支持具(1)の重量を測定し、重量信号を生成するのに適したはかり(41)、および前記重量信号(17)を処理して前記重量信号から前記処理ステージの終わりを推定する手段、
ならびに/または、前記ポンピング・デバイス(5、46)の前記真空ポンプ(5)の出口のところの湿度および/もしくはAMCセンサ(57)、
ならびに/または、前記密封チャンバ(4)のための圧力計(45)を含むことを特徴とする、請求項18に記載の処理ステーション。
【請求項21】
また、前記密封チャンバ(4)自体内で直接前記輸送支持具(1)を洗浄するために使用される洗浄デバイス(58)も含むことを特徴とする、請求項12乃至20のいずれか1項に記載の処理ステーション。
【請求項1】
基板の運搬および保管のための輸送支持具(1)の処理方法であって、
前記輸送支持具(1)上の処理されるべき表面(1a)から異物を除去するために前記処理されるべき表面(1a)がその間に準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらされる処理ステージを含み、前記赤外線は断続的赤外線であり、最高許容温度を超えない温度設定あたりで材料の温度を維持するために、満足のいく継続時間にわたって交互に切断/回復されることを特徴とする、方法。
【請求項2】
前記準大気圧(PSA)が、除去されるべき前記異物の状態図の三重点の圧力(PT)よりも大きいことを特徴とする、請求項1に記載の方法。
【請求項3】
前記赤外線(IR)が、除去されるべき1つまたは複数の前記異物の(1つまたは複数の)吸収波長あたりに最大強度をもつ発光スペクトルを呈することを特徴とする、請求項1または2のいずれか1項に記載の方法。
【請求項4】
前記赤外線(IR)が断続的赤外線であることを特徴とする、請求項1乃至3のいずれか1項に記載の方法。
【請求項5】
前記断続的赤外線(IR)が前記処理されるべき表面(1a)を適切な温度に設定する連続的な初期ステージ(E1)を含むことを特徴とする、請求項4に記載の方法。
【請求項6】
前記処理されるべき表面(1a)の温度(TM)を代表する試験温度が測定され、前記赤外線(IR)が、前記試験温度にしたがって、前記処理されるべき表面の前記温度(TM)を最高許容温度閾値(TA)よりも低い温度設定(TC)あたりで維持するように制御されることを特徴とする、請求項4または5のいずれか1項に記載の方法。
【請求項7】
前記準大気圧のガス圧(PSA)が測定され、圧力設定(PC)と比較されて、その比較に応じて、前記準大気圧のガス圧(PSA)を前記圧力設定(PC)あたりにもっていき、そのガス圧をそのレベルで維持するように、ポンピング速度、ポンピング・コンダクタンス、ガス流注入コンダクタンスなど、圧力を調節する手段を制御することを特徴とする、請求項1乃至6のいずれか1項に記載の方法。
【請求項8】
前記処理されるべき表面(1a)上の少なくとも1つの異物捕捉領域の近くに局所的なガス流(47)がその間に注入されるステージを含むことを特徴とする、請求項1乃至7のいずれか1項に記載の方法。
【請求項9】
前記処理されるべき表面(1a)が、その間に、除去されるべき異物を含まないクリーンなガス流(48)の注入による大気圧(Pa)あたりへのガス圧(PSA)の漸次上昇と周囲温度(Ta)あたりへの温度(TM)の降下とにさらされる、コンディショニング・ステージ(EC)を含むことを特徴とする、請求項1乃至8のいずれか1項に記載の方法。
【請求項10】
前記クリーンなガス流(48)が、十分に低速で選択され、ただし、高流量を可能にし、したがって干渉静電荷の生成および汚濁粒子の取込みを回避するために、広く分散されることを特徴とする、請求項9に記載の方法。
【請求項11】
前記処理されるべき表面(1a)からの前記異物の除去を代表するパラメータ(前記輸送支持具の重量、真空ポンプの出口のところの湿気またはAMCの量、前記密封チャンバ内の分圧または全圧)が測定され、前記代表パラメータが参照に達するときには前記処理が中断されることを特徴とする、請求項1乃至10のいずれか1項に記載の方法。
【請求項12】
基板の運搬および保管のための輸送支持具(1)のための処理ステーション(10)であって、
処理されるべき表面(1a)をもつ少なくとも1つの輸送支持具(1)を受けるのに適した、ポンピング・デバイス(5、46)に連結するための密封チャンバ(4)と、
前記処理されるべき表面(1a)を赤外線(IR)にさらすのに適した少なくとも1つの赤外線源(49)と、
前記処理されるべき表面(1a)を準大気圧のガス圧(PSA)と赤外線(IR)との複合作用にさらす、前記ポンピング・デバイス(5、46)および前記赤外線源(49)を制御するのに適した制御デバイス(17)とを含み、
前記制御デバイスが、材料の温度を最高許容温度を超えない温度設定あたりで維持するために、満足のいく継続時間にわたって交互に切断/回復される断続的赤外線手段を有することを特徴とする、処理ステーション(10)。
【請求項13】
前記密封チャンバ(4)内に置かれた、前記処理されるべき表面(1a)の温度(TM)を代表する試験温度を測定するのに適した少なくとも1つの温度センサ(50)を含むことを特徴とする、請求項12に記載の処理ステーション。
【請求項14】
前記温度センサ(50)が、その一方の面(56)が前記赤外線(IR)にさらされ、その反対側の面が温度プローブ(54)と接触している、処理されるべき前記輸送支持具(1)を構成するのと類似の材料で作製された小さい厚さ(e)の試験層(55)を含むことを特徴とする、請求項13に記載の処理ステーション。
【請求項15】
前記制御デバイス(17)が、前記温度センサ(50)によって生成される温度データを調べ、前記温度センサ(50)によって測定された温度が、それ自体が最高許容温度閾値(TA)を下回る温度設定(TC)よりも所定の差を超えて低いときには、前記赤外線源(49)の電力供給をトリガし、前記温度センサ(50)によって測定された温度が所定の差を超えて前記温度設定(TC)を上回るときには前記赤外線源(49)の電力供給を遮断する、赤外線制御プログラムを含むことを特徴とする、請求項13または14のいずれか1項に記載の処理ステーション。
【請求項16】
前記赤外線源(49)が、箱の形態の輸送支持具(1)の内側に挿入するのに適した少なくとも1つの線源部分(49a)を含むことを特徴とする、請求項12乃至15のいずれか1項に記載の処理ステーション。
【請求項17】
前記処理されるべき表面(1a)の近傍に第1の局所的なガス流(47)を注入するために初期ガス注入デバイス(18)を含むことを特徴とする、請求項12乃至16のいずれか1項に記載の処理ステーション。
【請求項18】
前記処理されるべき表面(1a)から隔てられた前記密封チャンバ(4)にクリーンなガス流(48)を注入するために第2のガス注入デバイス(60)を含むことを特徴とする、請求項12乃至17のいずれか1項に記載の処理ステーション。
【請求項19】
前記処理ステーションが、前記処理されるべき表面(1a)からの異物の除去を代表するパラメータを測定する手段(41、45、17)を含んでおり、前記制御デバイス(17)が、前記代表パラメータが参照値に達するときには前記処理を中断するのに適していることを特徴とする、請求項12乃至18のいずれか1項に記載の処理ステーション。
【請求項20】
代表パラメータのための前記測定デバイスが、
輸送支持具(1)の重量を測定し、重量信号を生成するのに適したはかり(41)、および前記重量信号(17)を処理して前記重量信号から前記処理ステージの終わりを推定する手段、
ならびに/または、前記ポンピング・デバイス(5、46)の前記真空ポンプ(5)の出口のところの湿度および/もしくはAMCセンサ(57)、
ならびに/または、前記密封チャンバ(4)のための圧力計(45)を含むことを特徴とする、請求項18に記載の処理ステーション。
【請求項21】
また、前記密封チャンバ(4)自体内で直接前記輸送支持具(1)を洗浄するために使用される洗浄デバイス(58)も含むことを特徴とする、請求項12乃至20のいずれか1項に記載の処理ステーション。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−70097(P2013−70097A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2013−147(P2013−147)
【出願日】平成25年1月4日(2013.1.4)
【分割の表示】特願2010−520552(P2010−520552)の分割
【原出願日】平成20年8月11日(2008.8.11)
【出願人】(391030332)アルカテル−ルーセント (1,149)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成25年1月4日(2013.1.4)
【分割の表示】特願2010−520552(P2010−520552)の分割
【原出願日】平成20年8月11日(2008.8.11)
【出願人】(391030332)アルカテル−ルーセント (1,149)
【Fターム(参考)】
[ Back to top ]