
半導体検査システム
【課題】FEMウェーハを自動測長する場合、測長対象の大きさは登録時と異なっていることが多いだけでなく、測長対象のパターンも崩れていることが多い。このため、測長の可否を自動的に判断することが困難である。
【解決手段】半導体検査システムにおいて、(1) 参照画像から算出される距離画像を利用し、検査画像の輪郭線の位置を特定する処理、(2) 特定された距離画像に対する輪郭線の位置に基づいて欠陥大きさ画像を算出し、当該欠陥大きさ画像から欠陥候補を検出する処理、(3-1) 欠陥候補が検出された場合、検出された欠陥候補の大きさを算出する処理、又は(3-2) 第1及び第2の輪郭線の相違部分を欠陥候補として検出する処理を実行する。
【解決手段】半導体検査システムにおいて、(1) 参照画像から算出される距離画像を利用し、検査画像の輪郭線の位置を特定する処理、(2) 特定された距離画像に対する輪郭線の位置に基づいて欠陥大きさ画像を算出し、当該欠陥大きさ画像から欠陥候補を検出する処理、(3-1) 欠陥候補が検出された場合、検出された欠陥候補の大きさを算出する処理、又は(3-2) 第1及び第2の輪郭線の相違部分を欠陥候補として検出する処理を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷電粒子線を用い、半導体回路パターンを検査又は測長する半導体検査システムに関する。
【背景技術】
【0002】
半導体素子(半導体集積回路)の微細化に伴い、回路構造を理想的な形状に形成することが困難になっている。そのため、露光シミュレーションや回路の光近接効果補正(OPC:Optical Proximity Correction)設計の重要性が増している。なお、以下の説明では、「光近接効果補正」を「OPC」と略記する。因みに、「露光シミュレーション」とは、基板上に半導体回路を形成する際における露光工程の光学的なシミュレーションをいう。「OPC設計」は、半導体製造の条件、特に露光条件を考慮して回路構造を設計することをいう。
【0003】
「露光シミュレーション」と回路の「OPC設計」のいずれについても、露光装置の光学的な特性を事前に調査する必要がある。事前の調査では、実際に製造した半導体の構造物の寸法や形状の代表値が、測長走査電子顕微鏡により計測される。通常、測長走査電子顕微鏡には、その計測手順がレシピと呼ばれるファイルに予め登録されており、測長走査電子顕微鏡はレシピに従って自動計測を実行する。
【0004】
ところで、露光装置の光学的な特性を調査するために行われる測長走査電子顕微鏡によるFEM(Focus Exposure Matrix)ウェーハの自動計測には、次の問題がある。
【0005】
第1の問題は、計測対象とする半導体構造物の大きさが露光条件により異なることである。同一の半導体構造物を複数の露光条件により製造すると、製造された半導体構造物の幅や高さは異なる大きさとなる。自動計測においては、レシピに登録した計測対象と構造物の大きさが違う場合、画像処理による位置照合(パターンマッチング)の実行が困難である。
【0006】
第2の問題は、計測対象の構造物が形成されていない場合、間違った計測が実行されることである。露光装置の光学的な特性を調査する場合には、露光条件が定まっていない段階で半導体構造物の製造が実行される。このため、使用された露光条件によっては、半導体構造物を形成できない場合がある。通常、測長走査電子顕微鏡は、計測対象である構造物の画像を撮像し、撮像画像のソフトウェア処理を通じて算出された構造物の寸法を出力する。この仕組みのため、測長走査電子顕微鏡は、たとえ撮像領域内に構造物が形成されていない場合でも、何らかの値を算出する。すなわち、間違った寸法を計測値として算出する。
【0007】
第1の問題の解決策は、例えば特許文献1及び2に記載されている。これらの特許文献は、大きさの異なる計測対象に対するパターンマッチングを可能とする手法を開示する。第2の問題の解決策は、例えば特許文献3に記載されている。この特許文献は、形状の変形が検出された場合にパターンマッチングが不一致であると判定し、計測が実行されないようにする。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−79982号公報
【特許文献2】特開2007−256225号公報
【特許文献3】特開2009−223414号公報
【非特許文献】
【0009】
【非特許文献1】F. Y. Shih, Y.-T. Wu : “Fast Euclidean distance transformation in two scans using a 3 x 3 neighborhood”, Computer Vision Image Understanding, vol.93, 2004, p195-205
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述した解決策によっても、第1の問題と第2の問題が別々に起るのであれば、それぞれの問題を解決することができる。しかし、いずれの解決策も、第1の問題と第2の問題が同時に起る場合には、その両方を同時に解決することはできない。
【0011】
実際、半導体構造物の製造に際し、露光条件を様々に変更して構造物を製造し、製造された構造物の寸法を自動計測する場合、計測対象である構造物の大きさは露光条件により変わり、構造物が形成されない場合もある。
【0012】
計測対象の有無が事前に分かっていない場合、測長走査電子顕微鏡には、構造物の形成の有無に応じて計測の実行の可否を判断する仕組みが要求される。具体的には、構造物が形成されていれば計測を実行し、構造物が形成されていなければ計測を実行しない仕組みが、測長走査電子顕微鏡に要求される。換言すると、測長走査電子顕微鏡には、大きさの変動に対して許容度があり、しかも、構造物の形成の有無を判定して計測の実行の可否も判定できる仕組みが必要とされる。しかし、前述の通り、既存の解決策は、製造される半導体構造物が異なる大きさに変形を受ける場合、計測の実行可否を判定すること自体が困難である。
本発明者は、前述した技術的課題を鋭意検討した結果、以下に示す発明を想到するにいたった。
【課題を解決するための手段】
【0013】
本発明者は、1つの発明として、欠陥の大きさに感度を有する検査技術を提供する。当該発明は、(1) 参照画像から算出される距離画像を利用し、検査画像の輪郭線の位置を特定する処理、(2) 特定された距離画像に対する輪郭線の位置に基づいて欠陥大きさ画像を算出し、当該欠陥大きさ画像から欠陥候補を検出する処理、(3) 欠陥候補が検出された場合、検出された欠陥候補の大きさを算出する処理を有している。
【0014】
また、本発明者は、1つの発明として、欠陥の輪郭の大きさに感度を有する検査技術を提案する。当該発明は、(1) 参照画像から第1の輪郭線を抽出する処理、(2) 検出画像から第2の輪郭線を抽出する処理、(3) 第1及び第2の輪郭線の相違部分を欠陥候補として検出する処理を有している。
【発明の効果】
【0015】
本発明によれば、欠陥又はその輪郭の大きさに感度を有する欠陥検出を実現できる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0016】
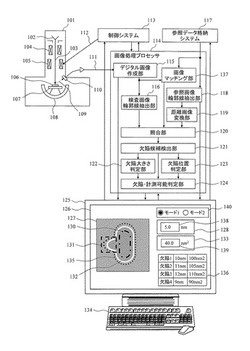
【図1】半導体検査システムの概略構成例を示す図。
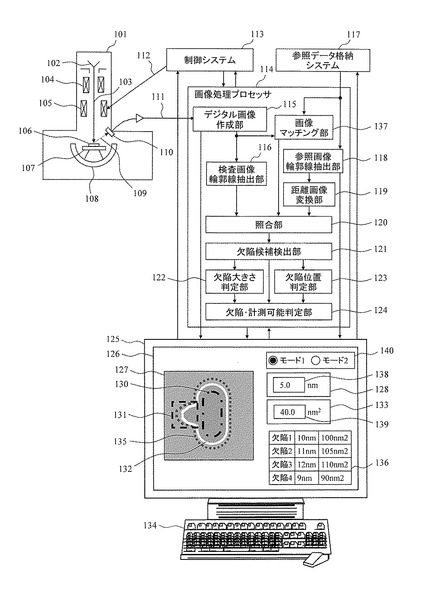
【図2】検査画像輪郭線、参照輪郭線画像、参照距離画像を説明する図。
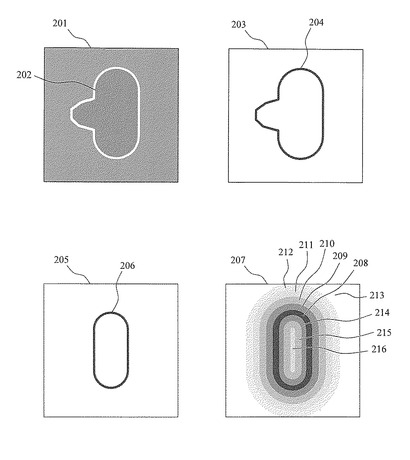
【図3】検査画像輪郭線と参照距離画像の照合を説明する図。
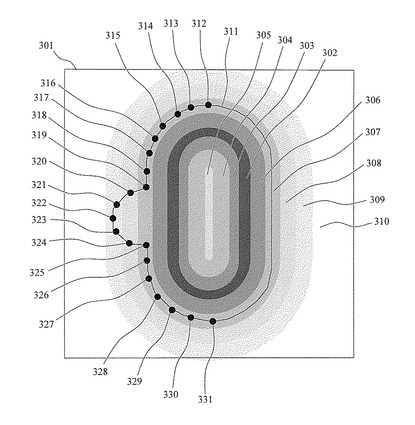
【図4】検査画像輪郭線と参照距離画像の照合により作成される欠陥大きさ画像を示す図。
【図5】欠陥大きさ画像の他の作成方法を説明する図。
【図6】欠陥大きさ画像から作成される欠陥抜き出し画像を説明する図。
【図7】欠陥の輪郭の大きさを検出する方法を説明する図。
【発明を実施するための形態】
【0017】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、本発明の実施態様は、後述する形態例に限定されるものではなく、その技術思想の範囲において、種々の変形が可能である。
【0018】
[実施例1]
[システム構成]
図1に、実施例に係る半導体検査システムの一例である欠陥検査システムの概略構成例を示す。また、本実施例では、電子線を用いて検査画像を取得する場合について説明する。すなわち、試料106の検査に電子顕微鏡101を用いる場合について説明する。もっとも、検査画像は、イオンビームを用いて取得することもできる。以下では、電子線顕微鏡101を用いる装置構成について説明する。
【0019】
電子顕微鏡101には、電子源としての電子銃102が配置される。電子銃102から発せられた電子線103は、電子レンズ104により収束され、試料106の表面に照射される。電子線103の照射位置からは、二次電子、反射電子等の二次信号109が発生する。二次信号109は電子検出器110により検出され、その強度を表す強度信号111に変換される。ここで、電子線103は、偏向器105が発生する偏向磁場により偏向制御される。この偏向制御により、試料106上における電子線103の照射位置は、ラスタ走査される。電子線103のラスタ走査は、制御システム113が発生する制御信号112により制御される。
【0020】
強度信号111は、画像処理プロセッサ114に与えられ、不図示のAD変換回路においてデジタル信号に変換される。デジタル変換後の強度信号は、デジタル画像作成部115に与えられる。デジタル画像作成部115は、与えられたデジタル信号から検査電子顕微鏡画像127を生成する。生成された検査電子顕微鏡画像127は、表示装置125の操作画面126に表示される。操作画面126には、オペレータの確認画像欄の他、文字や数値の入力欄が表示される。文字や数値は操作装置134を通じて入力される。
【0021】
なお、試料106は試料台107に載置されており、試料台107の電子線103に対する位置や傾きは試料台制御装置108により駆動制御される。当該駆動制御により、電子線103により照射される領域(ラスタ走査される範囲)を、試料106上で移動させることができる。
【0022】
制御システム113は、検査対象とする領域の情報に基づいて、電子顕微鏡101による試料106(例えば半導体ウェーハ)の撮像や検査を制御する。制御システム113は、画像処理プロセッサ114と通信し、処理動作に必要な情報をやり取りする。制御システム113は、操作画面126を通じて入力された文字や数値を、表示装置125を通じて入力する。なお、電子顕微鏡101、制御システム113、画像処理プロセッサ114、表示装置125、参照データ格納システム117は、データ交換に使用する不図示の通信装置を有している。
【0023】
画像処理プロセッサ114は、不図示の演算装置と記憶装置(ROM、RAM)で構成され、プログラム処理を通じて以下に示す処理機能を提供する。なお、各処理機能の一部又は全てをハードウェアとして実現しても良い。
【0024】
画像マッチング部137は、検査画像と参照画像の位置合わせを実行する処理部である。ここでの検査画像は、デジタル画像作成部115で生成された検査電子顕微鏡画像127に対応する。また、参照画像は、参照データ格納システム117から入力される参照データとして与えられる。参照データには、例えば回路の設計データ、露光用レチクルのパターンデータ、露光シミュレーション結果、電子顕微鏡画像等のいずれかを使用する。参照データを回路データとする場合、画像マッチング部137は、特許文献1や特許文献2に開示された既存技術により、検査画像と参照画像の位置合わせを行う。
【0025】
検査画像輪郭線抽出部116は、検査電子顕微鏡画像127から構造物132の外形線に当たる検査画像輪郭線135を作成する。図1の操作画面126においては、検査画像輪郭線135を点線にて表している。
【0026】
参照画像輪郭線抽出部118は、参照画像の外形線に当たる参照画像輪郭線130を作成する。図1の操作画面126においては、参照画像輪郭線130を一点鎖線にて表している。
【0027】
距離画像変換部119は、参照画像輪郭線130から参照距離画像(後述)を作成する。参照距離画像の作成には、既知の距離画像作成方法を使用する。既知の距離画像作成方法には、例えば非特許文献1に示すものがある。この実施例の場合、参照距離画像は、参照画像輪郭線130に対する距離情報を画像の輝度値として定義される。従って、同じ輝度値を有する画素列が、参照画像輪郭線130に対して同心円状に配置される。
【0028】
照合部120は、検査画像輪郭線135と参照距離画像を照合し、検査画像輪郭線135上の画素点に距離情報を含む欠陥大きさ画像を生成する。照合に際し、照合部120は、画像マッチング部137から検査画像と参照画像がマッチングする位置情報を取得する。この実施例の場合、欠陥大きさ画像の生成方法として2種類の方法が用意されており、そのいずれを適用するかは操作画面126を通じて指示することができる。
【0029】
欠陥候補検出部121は、欠陥大きさ画像にブロブ検出処理を適用し、欠陥候補を検出する。「ブロブ」とは、同一の輝度値を有する画素の集合のことである。この実施例の場合、輝度値は、参照画像輪郭線130に対する距離情報として与えられる。欠陥候補検出部121は、判定閾値より大きい輝度値を有する画素の集合を欠陥の候補領域として抽出し、欠陥抜き出し画像とする。欠陥抜き出し画像は、欠陥大きさ判定部122、欠陥位置判定部123、欠陥・計測可能判定部124に与えられる。
【0030】
欠陥大きさ判定部122は、候補領域の大きさ情報を求める。この実施例の場合、候補領域の大きさを面積として算出する。算出された面積は、大きさ情報として、欠陥・計測可能判定部124に与えられる。
【0031】
欠陥位置判定部123は、候補領域の位置を判定する。すなわち、欠陥領域131の位置(例えば参照画像輪郭線130からの最大距離)を求める。求められた位置情報は、欠陥・計測可能判定部124に与えられる。
【0032】
欠陥・計測可能判定部124は、大きさ情報及び/又は位置情報に基づいて候補領域が欠陥か否かを判定する。例えば欠陥・計測可能判定部124は、大きさ情報(候補領域の面積)と判定閾値を比較し、判定閾値より大きい候補領域を欠陥と判定し、判定閾値より小さい候補領域を欠陥でないと判定する。また例えば欠陥・計測可能判定部124は、位置情報と判定閾値を比較し、判定閾値より大きい距離の画素を含む候補領域を欠陥と判定し、判定閾値より小さい距離の画素だけを含む候補領域を欠陥でないと判定する。
【0033】
ここでの判定閾値は、操作画面126に対する入力値として与えられる。もっとも、初期値を用いても良い。また、各候補領域に対する判定結果は操作画面126に出力される。なお、必要に応じ、欠陥・計測可能判定部124は、欠陥の有無判定に基づいて計測(例えば測長)の実行の可否を判定する。計測の実行可否に関する情報は、欠陥・計測可能判定部124から不図示の測長走査電子顕微鏡に出力される。なお、測長走査電子顕微鏡は、電子顕微鏡101でも良い。因みに、計測の実行が許可された場合、測長走査電子顕微鏡は、不図示の記憶領域からレシピを読み出し、自動測長動作を実行する。
【0034】
図1に示す操作画面126には、試料106を撮像した検査電子顕微鏡画像127、参照画像輪郭線130(一点鎖線)、欠陥領域131(破線)、検査画像輪郭線135(点線)が表示されている。この他、操作画面126には、欠陥寸法閾値入力欄128、欠陥面積閾値入力欄133、欠陥リスト136、モード切替入力欄140が表示される。
【0035】
欠陥寸法閾値入力欄128には、欠陥位置判定部123で使用する判定閾値(寸法値)が入力される。図1の場合、閾値138として、「5.0nm」が入力されている。欠陥面積閾値入力欄133には、欠陥大きさ判定部122で使用する判定閾値(寸法値)が入力される。図1の場合、閾値139として、「40.0nm2」が入力されている。これらの数値は、操作装置134を通じて入力される。なお、図1では、操作装置134がキーボードである場合を表しているが、マウスやスタイラスペンその他の入力装置を用いても良い。
【0036】
欠陥リスト136には、欠陥大きさ判定部122及び/又は欠陥位置判定部123において欠陥と判定された複数の候補領域に関する情報が表示される。欠陥リスト136には、欠陥を識別する番号に、位置情報と大きさ情報が対応付けられている。モード切替入力欄140には、後述する2種類の欠陥大きさ画像の作成方法のいずれかを選択できるように、トグルスイッチ形式のボタンが表示されている。ここでは、2種類の作成方法を「モード1」及び「モード2」で示す。
【0037】
[検査画像輪郭線の抽出動作及び参照距離画像の生成動作]
図2に、検査画像輪郭線抽出部116と距離画像変換部119で実行される処理動作の内容を示す。
【0038】
検査画像輪郭線抽出部116は、検査電子顕微鏡画像201から構造物202の外形に対応する検査画像輪郭線204を抽出し、検査輪郭線画像203を生成する。ここで、検査電子顕微鏡画像201から検査画像輪郭線204を抽出する手法には、既存の様々な方法を適用することができる。例えば検査電子顕微鏡画像201に対してガウスフィルタを適用して平滑化し、その後、二次微分フィルタにより構造物202の輪郭を強調し、さらに当該輪郭強調後の画像の輝度値を二値化する方法を適用することができる。この処理結果として、検査画像輪郭線204が抽出された検査輪郭線画像203が作成される。なお、構造物が作成されていない場合、検査画像輪郭線204も抽出されないか、小さいものとなる。
【0039】
一方、距離画像変換部119は、参照画像輪郭線抽出部119から参照画像輪郭線206を画像化した参照輪郭線画像205を入力する。前述したように、参照画像を与える参照データには、例えば回路の設計データ、露光用レチクルのパターンデータ、露光シミュレーション結果、電子顕微鏡画像がある。回路の設計データと、露光用レチクルのパターンデータと、露光シミュレーション結果は、一般に頂点の集合で構成される輪郭線データである。従って、これらのデータが参照輪郭線画像205として用いられることは自明である。電子顕微鏡画像の場合、検査電子顕微鏡画像201を検査輪郭線画像203に変換する方法と同じ手法により、参照データを参照画像輪郭線206が抽出された参照輪郭線画像205に変換することができる。
【0040】
距離画像変換部119は、参照輪郭線画像205における参照画像輪郭線206に距離画像変換処理を適用することにより、参照距離画像207を作成する。距離画像変換部119は、前述したように、非特許文献1に記載された方法等、一般的に既知の方法を使用して距離画像変換処理を実行する。参照距離画像207においては、参照画像輪郭線206の位置から離れるのに伴い、画像の輝度値は大きくなる。
【0041】
この明細書において、参照距離画像207のうち参照画像輪郭線206と重なる領域を、「距離0領域」208という。この領域内の画素は、参照画像輪郭線206からの距離が単位距離未満であることを表している。さらに、この明細書においては、参照画像輪郭線206から外側に同心円状に広がる領域を、内側から順番に「距離1領域」209、「距離2領域」210、「距離3領域」211、「距離4領域」212という。「距離1領域」209は、この領域内の画素が、参照画像輪郭線206からの距離が単位距離以上かつ2単位距離未満であることを表している。他も同様である。
【0042】
なお、「距離4領域」212の外側領域である領域213にも、参照画像輪郭線206からの距離に応じて輝度値が異なる領域が設定される。ただし、図2においては、作図上の都合から記載を省略している。また、参照画像輪郭線206の内側にも、同心円状に「距離1領域」214、「距離2領域」215、「距離3領域」216が配置される。
【0043】
本明細書において、「距離0領域」208の内側に位置する画素は、いずれも輝度値「0」を有している。また、「距離1領域」209と「距離1領域」214の内側に位置する画素は、いずれも輝度値「1」を有している。また、「距離2領域」210と「距離2領域」215の内側に位置する画素は、いずれも輝度値「2」を有している。また、「距離3領域」211と「距離3領域」216の内側に位置する画素は、いずれも輝度値「3」を有している。また、「距離4領域」212の内側に位置する画素は、いずれも輝度値「4」を有している。また、領域213に位置する画素は、参照画像輪郭線206からの距離により異なる輝度値を有している。ここでは、表記上の都合により省略する。
【0044】
本実施例の場合、輝度値は、階調値(濃度値)、又は、撮像対象の実寸の縮尺値(例えばnm単位)、又は、画像内の画素の距離(例えばピクセル)等、ある特定の単位で設定する。
【0045】
[照合動作]
図3に、照合部120による検査画像輪郭線135と参照距離画像207の照合動作の内容を示す。この処理を通じて、欠陥大きさ画像が作成される。図3では、参照距離画像301上に、検査画像輪郭線311を重ね合わせて表している。重ね合わせの際には、画像マッチング部137による検査画像と参照画像の位置合わせ情報を使用する。なお、参照距離画像301は図2で説明したものと同じ構成である。照合動作を詳細に説明するため、図3では図2の拡大図を示している。
【0046】
参照距離画像301は、「距離0領域」302、「距離1領域」306、「距離2領域」307、「距離3領域」308、「距離4領域」309、「領域」310、「距離1領域」303、「距離2領域」304、「距離3領域」305から構成される。「領域」310においても、参照画像輪郭線からの距離に応じて順番に輝度値の異なる領域が設定されているが、図3では表記を省略する。
【0047】
図3には、検査画像輪郭線135を構成する一部の画素、すなわち画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素320、画素321、画素322、画素323、画素324、画素325、画素326、画素327、画素328、画素329、画素330、画素331が表されている。勿論、検査画像輪郭線311上には、これら以外にも多くの画素がある。図3では、表記上の都合により画素の表記を省略する。
【0048】
検査画像輪郭線311を参照距離画像301に重ね合わせた場合、画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素325、画素326、画素327、画素328、画素329、画素330、画素331は、「距離2領域」307の上に位置する。画素320、画素324は、「距離3領域」308の上に位置する。画素321、画素322、画素323は、「距離4領域」309の上に位置する。
【0049】
[欠陥大きさ画像の作成例1]
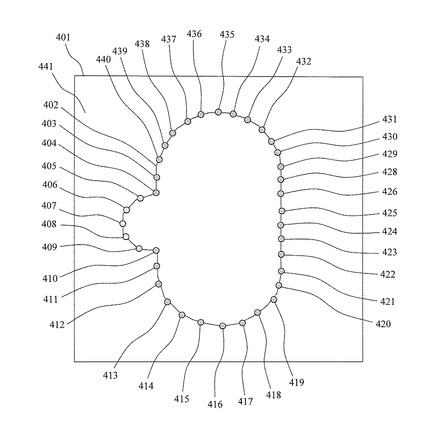
図4に、照合部120による照合動作の結果として作成される欠陥大きさ画像401の作成方法の一例を示す。欠陥大きさ画像401では、検査画像輪郭線311を構成する各画素に、参照距離画像301上の対応する領域の輝度値が対応付けられる。図4では、輝度値の違いを濃度によって表している。
【0050】
照合部120は、図3の「距離2領域」307上にある画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素325、画素326、画素327、画素328、画素329、画素330、画素331をそれぞれ、欠陥大きさ画像401上の画素403、画素404、画素410、画素411、画素412、画素413、画素414、画素415、画素416、画素417、画素418、画素419、画素420、画素421、画素422、画素423、画素424、画素425、画素426、画素427、画素428、画素429、画素430、画素431、画素432、画素433、画素434、画素435、画素436、画素437、画素438、画素439、画素440に変換する。変換後の画素は、「距離2領域」307の輝度値「2」を引継ぎ、輝度値「2」を有する。
【0051】
同様に、照合部120は、図3の「距離3領域」308上にある画素320、画素324を、欠陥大きさ画像401上の画素405、画素409に変換する。変換後の画素は、「距離3領域」の輝度値「3」を引き継ぎ、輝度値「3」を有する。
【0052】
作図の都合上、図4には、検査画像輪郭線402を構成する代表的な画素のみ示したが、検査画像輪郭線402上にある画素は全て参照距離画像301上の輝度値を有している。検査画像輪郭線402上にある画素の輝度値の範囲は、0から画像の対角線の距離である。また、この実施例の場合、検査画像輪郭線402より外側の領域441の画素には、「0」、「−1」以下の値その他の特定の輝度値が与えられる。ここで、特定の一定値には、検査画像輪郭線402に付与される輝度値の範囲以外の値等が考えられる。
【0053】
[欠陥大きさ画像の作成例2]
図5に、照合部120による照合動作の結果として作成される欠陥大きさ画像401の他の作成方法の一例を示す。すなわち、図5は、図4とは異なる方法を示す。なお、図4で説明した方法は、検査画像輪郭線311を構成する画素が、参照距離画像301と重なる位置の輝度値をそのまま引き継ぐ場合であった。
【0054】
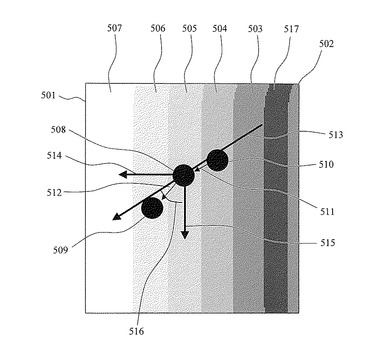
一方、図5で説明する方法は、参照距離画像301(図3)の輝度値と、参照距離画像301の傾き514と、検査画像輪郭線311(図3)の接線方向513を使用する。
【0055】
拡大図501は、参照距離画像301の一部分を拡大して示す図である。拡大図501には、輝度値「0」を有する「距離0領域」517、輝度値「1」を有する「距離1領域」502と「距離1領域」503、輝度値「2」を有する「距離2領域」504、輝度値「3」を有する「距離3領域」505、輝度値「4」を有する「距離4領域」506、輝度値「5」を有する「距離5領域」507が含まれている。また、画素508、画素509、画素510は、検査画像輪郭線311上で隣り合う画素である。
【0056】
また、図5には、画素508の接線方向513を示す矢印が描かれている。画素510と画素508は隣り合っている。このため、画素510から隣接画素(画素508)への方向511は、各々の画素の座標から容易に算出することができる。同様に、画素508と画素509も隣り合っている。このため、画素508から隣接画素(画素509)への方向512も容易に算出することができる。本実施例の場合、画素508の接線方向513は、方向511と方向512の平均ベクトルとして算出する。
【0057】
参照距離画像301の傾き514は、参照距離画像301の輝度値の傾き方向で与えられ、輝度値が大きくなる方向である。拡大図501の場合、画素508に隣接する画素の輝度値を中心に3画素×3画素の領域内の輝度値から算出する。傾きの算出方法そのものは、画像処理の一般的な手法である。
【0058】
輪郭線方向515は、参照距離画像301の傾き514に対して反時計回りに90°の方向として与えられる。輪郭線方向515と接線方向513から角度516を算出する。図5の場合、角度516は60°である。
【0059】
この場合、欠陥大きさ画像を構成する各画素の輝度値を以下のように求めることにする。前述したように、本実施例において、画素508は「距離3領域」に位置するので、その輝度値は「3」である。また、角度516の角度は60°である。このとき、参照距離画像301上での画素508に対応する輝度値を次式で与えることにする。
3×cos(60°)=3×√3/2
【0060】
この計算方法は、検査画像輪郭線311と参照距離画像301のどの画素についても、次式のように一般化することができる。
y=x・cosθ
【0061】
ただし、xは参照距離画像301の輝度値、θは参照距離画像301の傾き、yは欠陥大きさ画像の輝度値である。すなわち、この計算方法は、参照距離画像301と重なる位置の輝度値を、各画素の局所的な傾きを反映した重みで修正する方法である。因みに、接線方向513が輪郭線方向515と一致する場合(θ=0°)、欠陥大きさ画像の輝度値は、図4の場合と一致する。一方、接線方向513が参照距離画像301の傾き514と一致する場合(θ=90°)、欠陥大きさ画像の輝度値は0(ゼロ)になる。
【0062】
本明細書においては、参照距離画像301の輝度値から直接的に欠陥大きさ画像401を作成する方法を「モード1」と呼び、参照距離画像301の輝度値と、参照距離画像301の傾き514と、検査画像輪郭線311の接線方向513を用いて欠陥大きさ画像401を作成する方法を「モード2」と呼ぶ。「モード1」は処理ステップが少ない分、「モード2」に比較して処理時間が短く済む。一方、「モード1」は面積の算出精度が「モード2」に比較して低い。
【0063】
なお、「モード2」は、「モード1」に比較して面積の算出精度が高い。ただし、「モード2」は、処理ステップが「モード1」に比較して多くなる。このため、「モード2」の処理時間は、「モード1」のそれに比較して長くなる。
【0064】
以上説明したように、「モード1」と「モード2」はそれぞれ得失を有している。このため、応用用途により使い分けることが望ましい。また、前述したように、照合部120で使用するモードは、操作画面126のモード切替入力欄140に対する操作入力により切り替えることができる。
【0065】
[欠陥領域の検出]
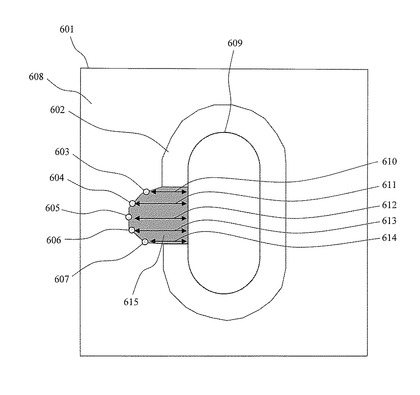
図6に、欠陥候補検出部121による欠陥領域131の検出動作の内容を示す。欠陥候補検出部121は、以下に示す手順により、欠陥大きさ画像401から欠陥領域131だけを含む欠陥抜き出し画像601を作成する。
【0066】
図6には、説明の都合上、検査画像輪郭線602と参照画像輪郭線609を表している。しかし、これらの線は、欠陥領域615の位置関係を明確にするために補助的に表したものであり、実際の欠陥抜き出し画像601には表示されないことに注意すべきである。
【0067】
図6には、欠陥抜き出し画像601の輪郭線上の画素603、画素604、画素605、画素606、画素607を表している。また、図中矢印で示される距離610は、画素603と参照画像輪郭線609の距離である。図中矢印で示される距離611は、画素604と参照画像輪郭線609の距離である。図中矢印で示される距離612は、画素605と参照画像輪郭線609の距離である。図中矢印で示される距離613は、画素606と参照画像輪郭線609の距離である。図中矢印で示される距離614は、画素607と参照画像輪郭線609の距離である。なお、着色領域で表される欠陥領域615は、欠陥抜き出し画像601内に表示された欠陥の領域を表している。
【0068】
ここで、距離610、距離611、距離612、距離613、距離614を示す各矢印や欠陥領域615は、説明の都合により表記しているものであり、実際の欠陥抜き出し画像601には存在しないものである。
【0069】
まず、欠陥候補検出部121は、欠陥大きさ画像401の各画素と欠陥寸法閾値入力欄128に入力された閾値138とを比較し、閾値より大きい値を有する画素だけを抜き出す。因みに、閾値138は、欠陥大きさ画像401の縮尺を合わせるよう変換されているものとする。
【0070】
例えば欠陥大きさ画像401の縮尺において、閾値138が「距離2」であった場合、欠陥候補検出部121は、「距離3」以上の距離情報を有する画素の集合を欠陥領域615と判定する。この際、欠陥候補検出部121は、図4において、検査画像輪郭線402上の画素のうち輝度値が3以上の画素を抜き出す。すなわち、画素405、画素406、画素407、画素408、画素409を抜き出す。これらの画素が、欠陥抜き出し画像601の画素603、画素604、画素605、画素606、画素607に対応する。作成された欠陥抜き出し画像601は、欠陥大きさ判定部122、欠陥位置判定部123、欠陥・計測可能判定部124に与えられる。
【0071】
次に、欠陥大きさ判定部122は、欠陥抜き出し画像601において連続する画素の輝度値の合計値を求める。図6において、画素603、画素604、画素605、画素606、画素607が連続する画素である。
【0072】
この実施例の場合、画素603の輝度値は「3」、画素604の輝度値は「4」、画素605の輝度値は「4」、画素606の輝度値は「4」、画素607の輝度値は「3」である。従って、これらの画素の合計値は、18(=3+4+4+4+3)となる。
【0073】
また、画素603の輝度値と距離610は同じであり、画素604の輝度値と距離611は同じであり、画素605の輝度と距離612は同じであり、画素606の輝度値と距離613は同じであり、画素607の輝度と距離614は同じである。さらに、画素603、画素604、画素605、画素606、画素607は、輪郭線方向に距離「1」ずつ離れているものとする。このとき、画素603、画素604、画素605、画素606、画素607の輝度値の合計値は、欠陥領域615の面積と一致する。
【0074】
欠陥・計測可能判定部124は、算出された欠陥領域615の面積と欠陥面積閾値入力欄133に入力された閾値139とを比較する。ここで、欠陥領域615の面積が閾値139より大きい場合、欠陥・計測可能判定部124は、当該欠陥領域615が欠陥であると判定する。一方、欠陥領域615の面積が閾値139より小さい場合、欠陥・計測可能判定部124は、当該欠陥領域615が欠陥ではないと判定する。ただし、閾値139は、欠陥大きさ画像401に縮尺を合わせるよう変換されているものとする。ここで、候補領域615の面積が閾値139以上のとき、候補領域615の面積はそのまま欠陥の面積となる。
【0075】
なお、この実施例においては、候補領域615の面積だけに基づいて欠陥か否かを判定しているが、候補領域615の参照画像輪郭線609からの距離(位置情報)に基づいて欠陥か否かを判定しても良い。例えば欠陥抜き出し画像601を構成する画素における輝度値の最大値が閾値138より大きいとき、当該候補領域615を欠陥と判定する。また、候補領域615の面積と位置情報の両方に基づいて欠陥か否かを判定しても良い。
【0076】
欠陥・計測可能判定部124は、欠陥が検出された場合には、測長走査電子顕微鏡による測長動作の実行を禁止する。一方、欠陥が検出されない場合、欠陥・計測可能判定部124は、引き続き、測長走査電子顕微鏡による測長動作の実行を許可する。
【0077】
[まとめ]
以上説明したように、本実施例に係る欠陥検査システムを用いれば、欠陥の大きさに感度のある欠陥検出を短い処理時間により実現することができる。また、本実施例に係る欠陥検査システムを用いれば、基準データ(参照データ)としての参照画像との比較により、欠陥の大きさを算出することができる。また、本実施例に係る欠陥検査システムを用いれば、検出された欠陥の画像上の位置を特定することができる。また、本実施例に係る欠陥検査システムを用いれば、候補領域615の大きさ及び/又は位置により欠陥の検出を制御することができる。また、本実施例に係る欠陥検査システムを用いれば、欠陥の画像上の位置と大きさを、操作画面126上で目視により確認することができる。また、本実施例に係る欠陥検査システムを用いれば、欠陥の有無、大きさ及び/又は位置により、後続する計測の実行の可否を自動的に判定することができる。また、本実施例に係る欠陥検査システムを用いれば、計測の自動判定結果を操作画面126を通じて使用者に提供することができる。
【0078】
[実施例2]
前述の実施例においては、欠陥大きさ画像401から欠陥抜き出し画像601を作成し、当該欠陥抜き出し画像601から抽出される欠陥領域615の大きさに基づいて欠陥の有無及びその後の測定の可否を判定する場合について説明した。
【0079】
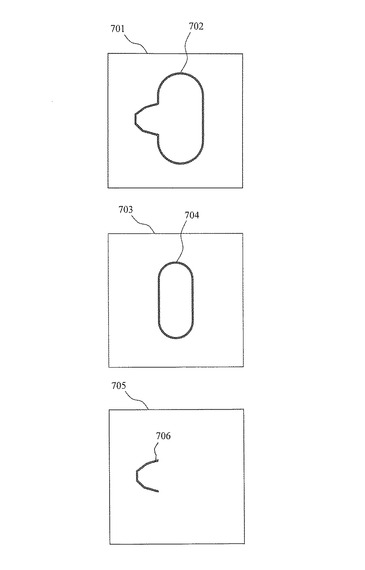
しかしながら、図7に示すように、検査電子顕微鏡画像701と参照輪郭線画像703とを比較して、検査画像輪郭線702と参照画像輪郭線704の差分画像705を作成し、2つの輪郭線の差分に当たる差分輪郭線706に基づいて欠陥の有無及びその後の測定の可否を判定しても良い。
【0080】
具体的には、差分輪郭線706の大きさや長さを差分画像705から求め、各値と対応する閾値との比較により、欠陥の有無及びその後の測定の可否を判定しても良い。なお、本実施例に係る欠陥検査システムの基本構成は、図1に示す装置構成と同じで良い。
【0081】
[他の実施例]
本発明は上述した実施例に限定されるものでなく、様々な変形例が含まれる。例えば、上述した実施例は、本発明を分かり易く説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
【0082】
また、上述した各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路その他のハードウェアとして実現しても良い。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することにより実現しても良い。すなわち、ソフトウェアとして実現しても良い。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記憶装置、ICカード、SDカード、DVD等の記憶媒体に格納することができる。
【0083】
また、制御線や情報線は、説明上必要と考えられるものを示すものであり、製品上必要な全ての制御線や情報線を表すものでない。実際にはほとんど全ての構成が相互に接続されていると考えて良い。
【符号の説明】
【0084】
101…電子顕微鏡
102…電子銃
103…電子線
104…電子レンズ
105…偏向器
106…試料
107…試料台
108…試料台制御装置
109…二次信号
110…電子検出器
111…強度信号
112…制御信号
113…制御システム
114…画像処理プロセッサ
115…デジタル画像作成部
116…検査画像輪郭線抽出部
117…参照データ格納システム
118…参照画像輪郭線抽出部
119…距離画像変換部
120…照合部
121…欠陥候補検出部
122…欠陥大きさ判定部
123…欠陥位置判定部
124…欠陥・計測可能判定部
125…表示装置
126…操作画面
127…検査電子顕微鏡画像
128…欠陥寸法閾値入力欄
130…参照画像輪郭線
131…欠陥領域
132…構造物
133…欠陥面積閾値入力欄
134…操作装置
135…検査画像輪郭線
136…欠陥リスト
137…画像マッチング部
138…閾値
139…閾値
140…モード切替入力欄
201…検査電子顕微鏡画像
202…構造物
203…検査輪郭線画像
204…検査画像輪郭線
205…参照輪郭線画像
206…参照画像輪郭線
207…参照距離画像
301…参照距離画像
311…検査画像輪郭線
401…欠陥大きさ画像
402…検査画像輪郭線
501…拡大図
511…方向
512…方向
513…接線方向
514…参照距離画像の傾き
515…輪郭線方向
516…角度
601…欠陥抜き出し画像
602…検査画像輪郭線
609…参照画像輪郭線
615…欠陥領域
706…差分輪郭線
【技術分野】
【0001】
本発明は、荷電粒子線を用い、半導体回路パターンを検査又は測長する半導体検査システムに関する。
【背景技術】
【0002】
半導体素子(半導体集積回路)の微細化に伴い、回路構造を理想的な形状に形成することが困難になっている。そのため、露光シミュレーションや回路の光近接効果補正(OPC:Optical Proximity Correction)設計の重要性が増している。なお、以下の説明では、「光近接効果補正」を「OPC」と略記する。因みに、「露光シミュレーション」とは、基板上に半導体回路を形成する際における露光工程の光学的なシミュレーションをいう。「OPC設計」は、半導体製造の条件、特に露光条件を考慮して回路構造を設計することをいう。
【0003】
「露光シミュレーション」と回路の「OPC設計」のいずれについても、露光装置の光学的な特性を事前に調査する必要がある。事前の調査では、実際に製造した半導体の構造物の寸法や形状の代表値が、測長走査電子顕微鏡により計測される。通常、測長走査電子顕微鏡には、その計測手順がレシピと呼ばれるファイルに予め登録されており、測長走査電子顕微鏡はレシピに従って自動計測を実行する。
【0004】
ところで、露光装置の光学的な特性を調査するために行われる測長走査電子顕微鏡によるFEM(Focus Exposure Matrix)ウェーハの自動計測には、次の問題がある。
【0005】
第1の問題は、計測対象とする半導体構造物の大きさが露光条件により異なることである。同一の半導体構造物を複数の露光条件により製造すると、製造された半導体構造物の幅や高さは異なる大きさとなる。自動計測においては、レシピに登録した計測対象と構造物の大きさが違う場合、画像処理による位置照合(パターンマッチング)の実行が困難である。
【0006】
第2の問題は、計測対象の構造物が形成されていない場合、間違った計測が実行されることである。露光装置の光学的な特性を調査する場合には、露光条件が定まっていない段階で半導体構造物の製造が実行される。このため、使用された露光条件によっては、半導体構造物を形成できない場合がある。通常、測長走査電子顕微鏡は、計測対象である構造物の画像を撮像し、撮像画像のソフトウェア処理を通じて算出された構造物の寸法を出力する。この仕組みのため、測長走査電子顕微鏡は、たとえ撮像領域内に構造物が形成されていない場合でも、何らかの値を算出する。すなわち、間違った寸法を計測値として算出する。
【0007】
第1の問題の解決策は、例えば特許文献1及び2に記載されている。これらの特許文献は、大きさの異なる計測対象に対するパターンマッチングを可能とする手法を開示する。第2の問題の解決策は、例えば特許文献3に記載されている。この特許文献は、形状の変形が検出された場合にパターンマッチングが不一致であると判定し、計測が実行されないようにする。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2007−79982号公報
【特許文献2】特開2007−256225号公報
【特許文献3】特開2009−223414号公報
【非特許文献】
【0009】
【非特許文献1】F. Y. Shih, Y.-T. Wu : “Fast Euclidean distance transformation in two scans using a 3 x 3 neighborhood”, Computer Vision Image Understanding, vol.93, 2004, p195-205
【発明の概要】
【発明が解決しようとする課題】
【0010】
前述した解決策によっても、第1の問題と第2の問題が別々に起るのであれば、それぞれの問題を解決することができる。しかし、いずれの解決策も、第1の問題と第2の問題が同時に起る場合には、その両方を同時に解決することはできない。
【0011】
実際、半導体構造物の製造に際し、露光条件を様々に変更して構造物を製造し、製造された構造物の寸法を自動計測する場合、計測対象である構造物の大きさは露光条件により変わり、構造物が形成されない場合もある。
【0012】
計測対象の有無が事前に分かっていない場合、測長走査電子顕微鏡には、構造物の形成の有無に応じて計測の実行の可否を判断する仕組みが要求される。具体的には、構造物が形成されていれば計測を実行し、構造物が形成されていなければ計測を実行しない仕組みが、測長走査電子顕微鏡に要求される。換言すると、測長走査電子顕微鏡には、大きさの変動に対して許容度があり、しかも、構造物の形成の有無を判定して計測の実行の可否も判定できる仕組みが必要とされる。しかし、前述の通り、既存の解決策は、製造される半導体構造物が異なる大きさに変形を受ける場合、計測の実行可否を判定すること自体が困難である。
本発明者は、前述した技術的課題を鋭意検討した結果、以下に示す発明を想到するにいたった。
【課題を解決するための手段】
【0013】
本発明者は、1つの発明として、欠陥の大きさに感度を有する検査技術を提供する。当該発明は、(1) 参照画像から算出される距離画像を利用し、検査画像の輪郭線の位置を特定する処理、(2) 特定された距離画像に対する輪郭線の位置に基づいて欠陥大きさ画像を算出し、当該欠陥大きさ画像から欠陥候補を検出する処理、(3) 欠陥候補が検出された場合、検出された欠陥候補の大きさを算出する処理を有している。
【0014】
また、本発明者は、1つの発明として、欠陥の輪郭の大きさに感度を有する検査技術を提案する。当該発明は、(1) 参照画像から第1の輪郭線を抽出する処理、(2) 検出画像から第2の輪郭線を抽出する処理、(3) 第1及び第2の輪郭線の相違部分を欠陥候補として検出する処理を有している。
【発明の効果】
【0015】
本発明によれば、欠陥又はその輪郭の大きさに感度を有する欠陥検出を実現できる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0016】
【図1】半導体検査システムの概略構成例を示す図。
【図2】検査画像輪郭線、参照輪郭線画像、参照距離画像を説明する図。
【図3】検査画像輪郭線と参照距離画像の照合を説明する図。
【図4】検査画像輪郭線と参照距離画像の照合により作成される欠陥大きさ画像を示す図。
【図5】欠陥大きさ画像の他の作成方法を説明する図。
【図6】欠陥大きさ画像から作成される欠陥抜き出し画像を説明する図。
【図7】欠陥の輪郭の大きさを検出する方法を説明する図。
【発明を実施するための形態】
【0017】
以下、図面に基づいて、本発明の実施の形態を説明する。なお、本発明の実施態様は、後述する形態例に限定されるものではなく、その技術思想の範囲において、種々の変形が可能である。
【0018】
[実施例1]
[システム構成]
図1に、実施例に係る半導体検査システムの一例である欠陥検査システムの概略構成例を示す。また、本実施例では、電子線を用いて検査画像を取得する場合について説明する。すなわち、試料106の検査に電子顕微鏡101を用いる場合について説明する。もっとも、検査画像は、イオンビームを用いて取得することもできる。以下では、電子線顕微鏡101を用いる装置構成について説明する。
【0019】
電子顕微鏡101には、電子源としての電子銃102が配置される。電子銃102から発せられた電子線103は、電子レンズ104により収束され、試料106の表面に照射される。電子線103の照射位置からは、二次電子、反射電子等の二次信号109が発生する。二次信号109は電子検出器110により検出され、その強度を表す強度信号111に変換される。ここで、電子線103は、偏向器105が発生する偏向磁場により偏向制御される。この偏向制御により、試料106上における電子線103の照射位置は、ラスタ走査される。電子線103のラスタ走査は、制御システム113が発生する制御信号112により制御される。
【0020】
強度信号111は、画像処理プロセッサ114に与えられ、不図示のAD変換回路においてデジタル信号に変換される。デジタル変換後の強度信号は、デジタル画像作成部115に与えられる。デジタル画像作成部115は、与えられたデジタル信号から検査電子顕微鏡画像127を生成する。生成された検査電子顕微鏡画像127は、表示装置125の操作画面126に表示される。操作画面126には、オペレータの確認画像欄の他、文字や数値の入力欄が表示される。文字や数値は操作装置134を通じて入力される。
【0021】
なお、試料106は試料台107に載置されており、試料台107の電子線103に対する位置や傾きは試料台制御装置108により駆動制御される。当該駆動制御により、電子線103により照射される領域(ラスタ走査される範囲)を、試料106上で移動させることができる。
【0022】
制御システム113は、検査対象とする領域の情報に基づいて、電子顕微鏡101による試料106(例えば半導体ウェーハ)の撮像や検査を制御する。制御システム113は、画像処理プロセッサ114と通信し、処理動作に必要な情報をやり取りする。制御システム113は、操作画面126を通じて入力された文字や数値を、表示装置125を通じて入力する。なお、電子顕微鏡101、制御システム113、画像処理プロセッサ114、表示装置125、参照データ格納システム117は、データ交換に使用する不図示の通信装置を有している。
【0023】
画像処理プロセッサ114は、不図示の演算装置と記憶装置(ROM、RAM)で構成され、プログラム処理を通じて以下に示す処理機能を提供する。なお、各処理機能の一部又は全てをハードウェアとして実現しても良い。
【0024】
画像マッチング部137は、検査画像と参照画像の位置合わせを実行する処理部である。ここでの検査画像は、デジタル画像作成部115で生成された検査電子顕微鏡画像127に対応する。また、参照画像は、参照データ格納システム117から入力される参照データとして与えられる。参照データには、例えば回路の設計データ、露光用レチクルのパターンデータ、露光シミュレーション結果、電子顕微鏡画像等のいずれかを使用する。参照データを回路データとする場合、画像マッチング部137は、特許文献1や特許文献2に開示された既存技術により、検査画像と参照画像の位置合わせを行う。
【0025】
検査画像輪郭線抽出部116は、検査電子顕微鏡画像127から構造物132の外形線に当たる検査画像輪郭線135を作成する。図1の操作画面126においては、検査画像輪郭線135を点線にて表している。
【0026】
参照画像輪郭線抽出部118は、参照画像の外形線に当たる参照画像輪郭線130を作成する。図1の操作画面126においては、参照画像輪郭線130を一点鎖線にて表している。
【0027】
距離画像変換部119は、参照画像輪郭線130から参照距離画像(後述)を作成する。参照距離画像の作成には、既知の距離画像作成方法を使用する。既知の距離画像作成方法には、例えば非特許文献1に示すものがある。この実施例の場合、参照距離画像は、参照画像輪郭線130に対する距離情報を画像の輝度値として定義される。従って、同じ輝度値を有する画素列が、参照画像輪郭線130に対して同心円状に配置される。
【0028】
照合部120は、検査画像輪郭線135と参照距離画像を照合し、検査画像輪郭線135上の画素点に距離情報を含む欠陥大きさ画像を生成する。照合に際し、照合部120は、画像マッチング部137から検査画像と参照画像がマッチングする位置情報を取得する。この実施例の場合、欠陥大きさ画像の生成方法として2種類の方法が用意されており、そのいずれを適用するかは操作画面126を通じて指示することができる。
【0029】
欠陥候補検出部121は、欠陥大きさ画像にブロブ検出処理を適用し、欠陥候補を検出する。「ブロブ」とは、同一の輝度値を有する画素の集合のことである。この実施例の場合、輝度値は、参照画像輪郭線130に対する距離情報として与えられる。欠陥候補検出部121は、判定閾値より大きい輝度値を有する画素の集合を欠陥の候補領域として抽出し、欠陥抜き出し画像とする。欠陥抜き出し画像は、欠陥大きさ判定部122、欠陥位置判定部123、欠陥・計測可能判定部124に与えられる。
【0030】
欠陥大きさ判定部122は、候補領域の大きさ情報を求める。この実施例の場合、候補領域の大きさを面積として算出する。算出された面積は、大きさ情報として、欠陥・計測可能判定部124に与えられる。
【0031】
欠陥位置判定部123は、候補領域の位置を判定する。すなわち、欠陥領域131の位置(例えば参照画像輪郭線130からの最大距離)を求める。求められた位置情報は、欠陥・計測可能判定部124に与えられる。
【0032】
欠陥・計測可能判定部124は、大きさ情報及び/又は位置情報に基づいて候補領域が欠陥か否かを判定する。例えば欠陥・計測可能判定部124は、大きさ情報(候補領域の面積)と判定閾値を比較し、判定閾値より大きい候補領域を欠陥と判定し、判定閾値より小さい候補領域を欠陥でないと判定する。また例えば欠陥・計測可能判定部124は、位置情報と判定閾値を比較し、判定閾値より大きい距離の画素を含む候補領域を欠陥と判定し、判定閾値より小さい距離の画素だけを含む候補領域を欠陥でないと判定する。
【0033】
ここでの判定閾値は、操作画面126に対する入力値として与えられる。もっとも、初期値を用いても良い。また、各候補領域に対する判定結果は操作画面126に出力される。なお、必要に応じ、欠陥・計測可能判定部124は、欠陥の有無判定に基づいて計測(例えば測長)の実行の可否を判定する。計測の実行可否に関する情報は、欠陥・計測可能判定部124から不図示の測長走査電子顕微鏡に出力される。なお、測長走査電子顕微鏡は、電子顕微鏡101でも良い。因みに、計測の実行が許可された場合、測長走査電子顕微鏡は、不図示の記憶領域からレシピを読み出し、自動測長動作を実行する。
【0034】
図1に示す操作画面126には、試料106を撮像した検査電子顕微鏡画像127、参照画像輪郭線130(一点鎖線)、欠陥領域131(破線)、検査画像輪郭線135(点線)が表示されている。この他、操作画面126には、欠陥寸法閾値入力欄128、欠陥面積閾値入力欄133、欠陥リスト136、モード切替入力欄140が表示される。
【0035】
欠陥寸法閾値入力欄128には、欠陥位置判定部123で使用する判定閾値(寸法値)が入力される。図1の場合、閾値138として、「5.0nm」が入力されている。欠陥面積閾値入力欄133には、欠陥大きさ判定部122で使用する判定閾値(寸法値)が入力される。図1の場合、閾値139として、「40.0nm2」が入力されている。これらの数値は、操作装置134を通じて入力される。なお、図1では、操作装置134がキーボードである場合を表しているが、マウスやスタイラスペンその他の入力装置を用いても良い。
【0036】
欠陥リスト136には、欠陥大きさ判定部122及び/又は欠陥位置判定部123において欠陥と判定された複数の候補領域に関する情報が表示される。欠陥リスト136には、欠陥を識別する番号に、位置情報と大きさ情報が対応付けられている。モード切替入力欄140には、後述する2種類の欠陥大きさ画像の作成方法のいずれかを選択できるように、トグルスイッチ形式のボタンが表示されている。ここでは、2種類の作成方法を「モード1」及び「モード2」で示す。
【0037】
[検査画像輪郭線の抽出動作及び参照距離画像の生成動作]
図2に、検査画像輪郭線抽出部116と距離画像変換部119で実行される処理動作の内容を示す。
【0038】
検査画像輪郭線抽出部116は、検査電子顕微鏡画像201から構造物202の外形に対応する検査画像輪郭線204を抽出し、検査輪郭線画像203を生成する。ここで、検査電子顕微鏡画像201から検査画像輪郭線204を抽出する手法には、既存の様々な方法を適用することができる。例えば検査電子顕微鏡画像201に対してガウスフィルタを適用して平滑化し、その後、二次微分フィルタにより構造物202の輪郭を強調し、さらに当該輪郭強調後の画像の輝度値を二値化する方法を適用することができる。この処理結果として、検査画像輪郭線204が抽出された検査輪郭線画像203が作成される。なお、構造物が作成されていない場合、検査画像輪郭線204も抽出されないか、小さいものとなる。
【0039】
一方、距離画像変換部119は、参照画像輪郭線抽出部119から参照画像輪郭線206を画像化した参照輪郭線画像205を入力する。前述したように、参照画像を与える参照データには、例えば回路の設計データ、露光用レチクルのパターンデータ、露光シミュレーション結果、電子顕微鏡画像がある。回路の設計データと、露光用レチクルのパターンデータと、露光シミュレーション結果は、一般に頂点の集合で構成される輪郭線データである。従って、これらのデータが参照輪郭線画像205として用いられることは自明である。電子顕微鏡画像の場合、検査電子顕微鏡画像201を検査輪郭線画像203に変換する方法と同じ手法により、参照データを参照画像輪郭線206が抽出された参照輪郭線画像205に変換することができる。
【0040】
距離画像変換部119は、参照輪郭線画像205における参照画像輪郭線206に距離画像変換処理を適用することにより、参照距離画像207を作成する。距離画像変換部119は、前述したように、非特許文献1に記載された方法等、一般的に既知の方法を使用して距離画像変換処理を実行する。参照距離画像207においては、参照画像輪郭線206の位置から離れるのに伴い、画像の輝度値は大きくなる。
【0041】
この明細書において、参照距離画像207のうち参照画像輪郭線206と重なる領域を、「距離0領域」208という。この領域内の画素は、参照画像輪郭線206からの距離が単位距離未満であることを表している。さらに、この明細書においては、参照画像輪郭線206から外側に同心円状に広がる領域を、内側から順番に「距離1領域」209、「距離2領域」210、「距離3領域」211、「距離4領域」212という。「距離1領域」209は、この領域内の画素が、参照画像輪郭線206からの距離が単位距離以上かつ2単位距離未満であることを表している。他も同様である。
【0042】
なお、「距離4領域」212の外側領域である領域213にも、参照画像輪郭線206からの距離に応じて輝度値が異なる領域が設定される。ただし、図2においては、作図上の都合から記載を省略している。また、参照画像輪郭線206の内側にも、同心円状に「距離1領域」214、「距離2領域」215、「距離3領域」216が配置される。
【0043】
本明細書において、「距離0領域」208の内側に位置する画素は、いずれも輝度値「0」を有している。また、「距離1領域」209と「距離1領域」214の内側に位置する画素は、いずれも輝度値「1」を有している。また、「距離2領域」210と「距離2領域」215の内側に位置する画素は、いずれも輝度値「2」を有している。また、「距離3領域」211と「距離3領域」216の内側に位置する画素は、いずれも輝度値「3」を有している。また、「距離4領域」212の内側に位置する画素は、いずれも輝度値「4」を有している。また、領域213に位置する画素は、参照画像輪郭線206からの距離により異なる輝度値を有している。ここでは、表記上の都合により省略する。
【0044】
本実施例の場合、輝度値は、階調値(濃度値)、又は、撮像対象の実寸の縮尺値(例えばnm単位)、又は、画像内の画素の距離(例えばピクセル)等、ある特定の単位で設定する。
【0045】
[照合動作]
図3に、照合部120による検査画像輪郭線135と参照距離画像207の照合動作の内容を示す。この処理を通じて、欠陥大きさ画像が作成される。図3では、参照距離画像301上に、検査画像輪郭線311を重ね合わせて表している。重ね合わせの際には、画像マッチング部137による検査画像と参照画像の位置合わせ情報を使用する。なお、参照距離画像301は図2で説明したものと同じ構成である。照合動作を詳細に説明するため、図3では図2の拡大図を示している。
【0046】
参照距離画像301は、「距離0領域」302、「距離1領域」306、「距離2領域」307、「距離3領域」308、「距離4領域」309、「領域」310、「距離1領域」303、「距離2領域」304、「距離3領域」305から構成される。「領域」310においても、参照画像輪郭線からの距離に応じて順番に輝度値の異なる領域が設定されているが、図3では表記を省略する。
【0047】
図3には、検査画像輪郭線135を構成する一部の画素、すなわち画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素320、画素321、画素322、画素323、画素324、画素325、画素326、画素327、画素328、画素329、画素330、画素331が表されている。勿論、検査画像輪郭線311上には、これら以外にも多くの画素がある。図3では、表記上の都合により画素の表記を省略する。
【0048】
検査画像輪郭線311を参照距離画像301に重ね合わせた場合、画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素325、画素326、画素327、画素328、画素329、画素330、画素331は、「距離2領域」307の上に位置する。画素320、画素324は、「距離3領域」308の上に位置する。画素321、画素322、画素323は、「距離4領域」309の上に位置する。
【0049】
[欠陥大きさ画像の作成例1]
図4に、照合部120による照合動作の結果として作成される欠陥大きさ画像401の作成方法の一例を示す。欠陥大きさ画像401では、検査画像輪郭線311を構成する各画素に、参照距離画像301上の対応する領域の輝度値が対応付けられる。図4では、輝度値の違いを濃度によって表している。
【0050】
照合部120は、図3の「距離2領域」307上にある画素312、画素313、画素314、画素315、画素316、画素317、画素318、画素319、画素325、画素326、画素327、画素328、画素329、画素330、画素331をそれぞれ、欠陥大きさ画像401上の画素403、画素404、画素410、画素411、画素412、画素413、画素414、画素415、画素416、画素417、画素418、画素419、画素420、画素421、画素422、画素423、画素424、画素425、画素426、画素427、画素428、画素429、画素430、画素431、画素432、画素433、画素434、画素435、画素436、画素437、画素438、画素439、画素440に変換する。変換後の画素は、「距離2領域」307の輝度値「2」を引継ぎ、輝度値「2」を有する。
【0051】
同様に、照合部120は、図3の「距離3領域」308上にある画素320、画素324を、欠陥大きさ画像401上の画素405、画素409に変換する。変換後の画素は、「距離3領域」の輝度値「3」を引き継ぎ、輝度値「3」を有する。
【0052】
作図の都合上、図4には、検査画像輪郭線402を構成する代表的な画素のみ示したが、検査画像輪郭線402上にある画素は全て参照距離画像301上の輝度値を有している。検査画像輪郭線402上にある画素の輝度値の範囲は、0から画像の対角線の距離である。また、この実施例の場合、検査画像輪郭線402より外側の領域441の画素には、「0」、「−1」以下の値その他の特定の輝度値が与えられる。ここで、特定の一定値には、検査画像輪郭線402に付与される輝度値の範囲以外の値等が考えられる。
【0053】
[欠陥大きさ画像の作成例2]
図5に、照合部120による照合動作の結果として作成される欠陥大きさ画像401の他の作成方法の一例を示す。すなわち、図5は、図4とは異なる方法を示す。なお、図4で説明した方法は、検査画像輪郭線311を構成する画素が、参照距離画像301と重なる位置の輝度値をそのまま引き継ぐ場合であった。
【0054】
一方、図5で説明する方法は、参照距離画像301(図3)の輝度値と、参照距離画像301の傾き514と、検査画像輪郭線311(図3)の接線方向513を使用する。
【0055】
拡大図501は、参照距離画像301の一部分を拡大して示す図である。拡大図501には、輝度値「0」を有する「距離0領域」517、輝度値「1」を有する「距離1領域」502と「距離1領域」503、輝度値「2」を有する「距離2領域」504、輝度値「3」を有する「距離3領域」505、輝度値「4」を有する「距離4領域」506、輝度値「5」を有する「距離5領域」507が含まれている。また、画素508、画素509、画素510は、検査画像輪郭線311上で隣り合う画素である。
【0056】
また、図5には、画素508の接線方向513を示す矢印が描かれている。画素510と画素508は隣り合っている。このため、画素510から隣接画素(画素508)への方向511は、各々の画素の座標から容易に算出することができる。同様に、画素508と画素509も隣り合っている。このため、画素508から隣接画素(画素509)への方向512も容易に算出することができる。本実施例の場合、画素508の接線方向513は、方向511と方向512の平均ベクトルとして算出する。
【0057】
参照距離画像301の傾き514は、参照距離画像301の輝度値の傾き方向で与えられ、輝度値が大きくなる方向である。拡大図501の場合、画素508に隣接する画素の輝度値を中心に3画素×3画素の領域内の輝度値から算出する。傾きの算出方法そのものは、画像処理の一般的な手法である。
【0058】
輪郭線方向515は、参照距離画像301の傾き514に対して反時計回りに90°の方向として与えられる。輪郭線方向515と接線方向513から角度516を算出する。図5の場合、角度516は60°である。
【0059】
この場合、欠陥大きさ画像を構成する各画素の輝度値を以下のように求めることにする。前述したように、本実施例において、画素508は「距離3領域」に位置するので、その輝度値は「3」である。また、角度516の角度は60°である。このとき、参照距離画像301上での画素508に対応する輝度値を次式で与えることにする。
3×cos(60°)=3×√3/2
【0060】
この計算方法は、検査画像輪郭線311と参照距離画像301のどの画素についても、次式のように一般化することができる。
y=x・cosθ
【0061】
ただし、xは参照距離画像301の輝度値、θは参照距離画像301の傾き、yは欠陥大きさ画像の輝度値である。すなわち、この計算方法は、参照距離画像301と重なる位置の輝度値を、各画素の局所的な傾きを反映した重みで修正する方法である。因みに、接線方向513が輪郭線方向515と一致する場合(θ=0°)、欠陥大きさ画像の輝度値は、図4の場合と一致する。一方、接線方向513が参照距離画像301の傾き514と一致する場合(θ=90°)、欠陥大きさ画像の輝度値は0(ゼロ)になる。
【0062】
本明細書においては、参照距離画像301の輝度値から直接的に欠陥大きさ画像401を作成する方法を「モード1」と呼び、参照距離画像301の輝度値と、参照距離画像301の傾き514と、検査画像輪郭線311の接線方向513を用いて欠陥大きさ画像401を作成する方法を「モード2」と呼ぶ。「モード1」は処理ステップが少ない分、「モード2」に比較して処理時間が短く済む。一方、「モード1」は面積の算出精度が「モード2」に比較して低い。
【0063】
なお、「モード2」は、「モード1」に比較して面積の算出精度が高い。ただし、「モード2」は、処理ステップが「モード1」に比較して多くなる。このため、「モード2」の処理時間は、「モード1」のそれに比較して長くなる。
【0064】
以上説明したように、「モード1」と「モード2」はそれぞれ得失を有している。このため、応用用途により使い分けることが望ましい。また、前述したように、照合部120で使用するモードは、操作画面126のモード切替入力欄140に対する操作入力により切り替えることができる。
【0065】
[欠陥領域の検出]
図6に、欠陥候補検出部121による欠陥領域131の検出動作の内容を示す。欠陥候補検出部121は、以下に示す手順により、欠陥大きさ画像401から欠陥領域131だけを含む欠陥抜き出し画像601を作成する。
【0066】
図6には、説明の都合上、検査画像輪郭線602と参照画像輪郭線609を表している。しかし、これらの線は、欠陥領域615の位置関係を明確にするために補助的に表したものであり、実際の欠陥抜き出し画像601には表示されないことに注意すべきである。
【0067】
図6には、欠陥抜き出し画像601の輪郭線上の画素603、画素604、画素605、画素606、画素607を表している。また、図中矢印で示される距離610は、画素603と参照画像輪郭線609の距離である。図中矢印で示される距離611は、画素604と参照画像輪郭線609の距離である。図中矢印で示される距離612は、画素605と参照画像輪郭線609の距離である。図中矢印で示される距離613は、画素606と参照画像輪郭線609の距離である。図中矢印で示される距離614は、画素607と参照画像輪郭線609の距離である。なお、着色領域で表される欠陥領域615は、欠陥抜き出し画像601内に表示された欠陥の領域を表している。
【0068】
ここで、距離610、距離611、距離612、距離613、距離614を示す各矢印や欠陥領域615は、説明の都合により表記しているものであり、実際の欠陥抜き出し画像601には存在しないものである。
【0069】
まず、欠陥候補検出部121は、欠陥大きさ画像401の各画素と欠陥寸法閾値入力欄128に入力された閾値138とを比較し、閾値より大きい値を有する画素だけを抜き出す。因みに、閾値138は、欠陥大きさ画像401の縮尺を合わせるよう変換されているものとする。
【0070】
例えば欠陥大きさ画像401の縮尺において、閾値138が「距離2」であった場合、欠陥候補検出部121は、「距離3」以上の距離情報を有する画素の集合を欠陥領域615と判定する。この際、欠陥候補検出部121は、図4において、検査画像輪郭線402上の画素のうち輝度値が3以上の画素を抜き出す。すなわち、画素405、画素406、画素407、画素408、画素409を抜き出す。これらの画素が、欠陥抜き出し画像601の画素603、画素604、画素605、画素606、画素607に対応する。作成された欠陥抜き出し画像601は、欠陥大きさ判定部122、欠陥位置判定部123、欠陥・計測可能判定部124に与えられる。
【0071】
次に、欠陥大きさ判定部122は、欠陥抜き出し画像601において連続する画素の輝度値の合計値を求める。図6において、画素603、画素604、画素605、画素606、画素607が連続する画素である。
【0072】
この実施例の場合、画素603の輝度値は「3」、画素604の輝度値は「4」、画素605の輝度値は「4」、画素606の輝度値は「4」、画素607の輝度値は「3」である。従って、これらの画素の合計値は、18(=3+4+4+4+3)となる。
【0073】
また、画素603の輝度値と距離610は同じであり、画素604の輝度値と距離611は同じであり、画素605の輝度と距離612は同じであり、画素606の輝度値と距離613は同じであり、画素607の輝度と距離614は同じである。さらに、画素603、画素604、画素605、画素606、画素607は、輪郭線方向に距離「1」ずつ離れているものとする。このとき、画素603、画素604、画素605、画素606、画素607の輝度値の合計値は、欠陥領域615の面積と一致する。
【0074】
欠陥・計測可能判定部124は、算出された欠陥領域615の面積と欠陥面積閾値入力欄133に入力された閾値139とを比較する。ここで、欠陥領域615の面積が閾値139より大きい場合、欠陥・計測可能判定部124は、当該欠陥領域615が欠陥であると判定する。一方、欠陥領域615の面積が閾値139より小さい場合、欠陥・計測可能判定部124は、当該欠陥領域615が欠陥ではないと判定する。ただし、閾値139は、欠陥大きさ画像401に縮尺を合わせるよう変換されているものとする。ここで、候補領域615の面積が閾値139以上のとき、候補領域615の面積はそのまま欠陥の面積となる。
【0075】
なお、この実施例においては、候補領域615の面積だけに基づいて欠陥か否かを判定しているが、候補領域615の参照画像輪郭線609からの距離(位置情報)に基づいて欠陥か否かを判定しても良い。例えば欠陥抜き出し画像601を構成する画素における輝度値の最大値が閾値138より大きいとき、当該候補領域615を欠陥と判定する。また、候補領域615の面積と位置情報の両方に基づいて欠陥か否かを判定しても良い。
【0076】
欠陥・計測可能判定部124は、欠陥が検出された場合には、測長走査電子顕微鏡による測長動作の実行を禁止する。一方、欠陥が検出されない場合、欠陥・計測可能判定部124は、引き続き、測長走査電子顕微鏡による測長動作の実行を許可する。
【0077】
[まとめ]
以上説明したように、本実施例に係る欠陥検査システムを用いれば、欠陥の大きさに感度のある欠陥検出を短い処理時間により実現することができる。また、本実施例に係る欠陥検査システムを用いれば、基準データ(参照データ)としての参照画像との比較により、欠陥の大きさを算出することができる。また、本実施例に係る欠陥検査システムを用いれば、検出された欠陥の画像上の位置を特定することができる。また、本実施例に係る欠陥検査システムを用いれば、候補領域615の大きさ及び/又は位置により欠陥の検出を制御することができる。また、本実施例に係る欠陥検査システムを用いれば、欠陥の画像上の位置と大きさを、操作画面126上で目視により確認することができる。また、本実施例に係る欠陥検査システムを用いれば、欠陥の有無、大きさ及び/又は位置により、後続する計測の実行の可否を自動的に判定することができる。また、本実施例に係る欠陥検査システムを用いれば、計測の自動判定結果を操作画面126を通じて使用者に提供することができる。
【0078】
[実施例2]
前述の実施例においては、欠陥大きさ画像401から欠陥抜き出し画像601を作成し、当該欠陥抜き出し画像601から抽出される欠陥領域615の大きさに基づいて欠陥の有無及びその後の測定の可否を判定する場合について説明した。
【0079】
しかしながら、図7に示すように、検査電子顕微鏡画像701と参照輪郭線画像703とを比較して、検査画像輪郭線702と参照画像輪郭線704の差分画像705を作成し、2つの輪郭線の差分に当たる差分輪郭線706に基づいて欠陥の有無及びその後の測定の可否を判定しても良い。
【0080】
具体的には、差分輪郭線706の大きさや長さを差分画像705から求め、各値と対応する閾値との比較により、欠陥の有無及びその後の測定の可否を判定しても良い。なお、本実施例に係る欠陥検査システムの基本構成は、図1に示す装置構成と同じで良い。
【0081】
[他の実施例]
本発明は上述した実施例に限定されるものでなく、様々な変形例が含まれる。例えば、上述した実施例は、本発明を分かり易く説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、ある実施例の一部を他の実施例の構成に置き換えることが可能であり、また、ある実施例の構成に他の実施例の構成を加えることも可能である。また、各実施例の構成の一部について、他の構成を追加、削除又は置換することも可能である。
【0082】
また、上述した各構成、機能、処理部、処理手段等は、それらの一部又は全部を、例えば集積回路その他のハードウェアとして実現しても良い。また、上記の各構成、機能等は、プロセッサがそれぞれの機能を実現するプログラムを解釈し、実行することにより実現しても良い。すなわち、ソフトウェアとして実現しても良い。各機能を実現するプログラム、テーブル、ファイル等の情報は、メモリやハードディスク、SSD(Solid State Drive)等の記憶装置、ICカード、SDカード、DVD等の記憶媒体に格納することができる。
【0083】
また、制御線や情報線は、説明上必要と考えられるものを示すものであり、製品上必要な全ての制御線や情報線を表すものでない。実際にはほとんど全ての構成が相互に接続されていると考えて良い。
【符号の説明】
【0084】
101…電子顕微鏡
102…電子銃
103…電子線
104…電子レンズ
105…偏向器
106…試料
107…試料台
108…試料台制御装置
109…二次信号
110…電子検出器
111…強度信号
112…制御信号
113…制御システム
114…画像処理プロセッサ
115…デジタル画像作成部
116…検査画像輪郭線抽出部
117…参照データ格納システム
118…参照画像輪郭線抽出部
119…距離画像変換部
120…照合部
121…欠陥候補検出部
122…欠陥大きさ判定部
123…欠陥位置判定部
124…欠陥・計測可能判定部
125…表示装置
126…操作画面
127…検査電子顕微鏡画像
128…欠陥寸法閾値入力欄
130…参照画像輪郭線
131…欠陥領域
132…構造物
133…欠陥面積閾値入力欄
134…操作装置
135…検査画像輪郭線
136…欠陥リスト
137…画像マッチング部
138…閾値
139…閾値
140…モード切替入力欄
201…検査電子顕微鏡画像
202…構造物
203…検査輪郭線画像
204…検査画像輪郭線
205…参照輪郭線画像
206…参照画像輪郭線
207…参照距離画像
301…参照距離画像
311…検査画像輪郭線
401…欠陥大きさ画像
402…検査画像輪郭線
501…拡大図
511…方向
512…方向
513…接線方向
514…参照距離画像の傾き
515…輪郭線方向
516…角度
601…欠陥抜き出し画像
602…検査画像輪郭線
609…参照画像輪郭線
615…欠陥領域
706…差分輪郭線
【特許請求の範囲】
【請求項1】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第2の輪郭線から参照距離画像を作成する距離画像作成部と、
前記第1の輪郭線と前記参照距離画像とを照合し、欠陥大きさ画像を作成する照合部と、
前記欠陥大きさ画像から欠陥候補を検出する欠陥候補検出部と、
前記欠陥候補が検出された場合、その大きさを算出する欠陥大きさ判定部と
を有することを特徴とする半導体検査システム。
【請求項2】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項3】
請求項2に記載の半導体検査システムにおいて、
前記欠陥候補の大きさは、欠陥候補の面積である
ことを特徴とする半導体検査システム。
【請求項4】
請求項2に記載の半導体検査システムにおいて、
欠陥か否かを判定するための閾値を入力する入力装置を有する
ことを特徴とする半導体検査システム。
【請求項5】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補がその大きさにより欠陥であると判定された場合に、計測の実行を許容するか否かを判定する計測可能判定部を有する
ことを特徴とする半導体検査システム。
【請求項6】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、各画素と前記参照距離画像が重なる位置の輝度値を付与することにより、前記欠陥大きさ画像を作成する
ことを特徴とする半導体検査システム。
【請求項7】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、各画素と前記参照距離画像が重なる位置の輝度値と、前記第1の輪郭線の接線方向と、前記参照距離画像の傾きとに基づいて算出される輝度値を付与することにより、前記欠陥大きさ画像を作成する
ことを特徴とする半導体検査システム。
【請求項8】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、
各画素と前記参照距離画像が重なる位置の輝度値を付与することにより、前記欠陥大きさ画像を作成する第1の方法と、
各画素と前記参照距離画像が重なる位置の輝度値と、前記第1の輪郭線の接線方向と、前記参照距離画像の傾きとに基づいて算出される輝度値を付与することにより、前記欠陥大きさ画像を作成する第2の方法のいずれかを選択的に適用する
ことを特徴とする半導体検査システム。
【請求項9】
請求項8に記載の半導体検査システムにおいて、
前記第1の方法と前記第2の方法の切り替えを前記照合部に対して指示入力する操作装置を有する
ことを特徴とする半導体検査システム。
【請求項10】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補が検出された場合、当該欠陥候補の前記第2の輪郭線からの距離を算出し、当該距離と前記欠陥候補の大きさとに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項11】
請求項10に記載の半導体検査システムにおいて、
欠陥か否かを判定するための閾値を入力する入力装置を有する
ことを特徴とする半導体検査システム。
【請求項12】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第2の輪郭線から参照距離画像を作成する距離画像作成部と、
前記第1の輪郭線と前記参照距離画像とを照合し、欠陥大きさ画像を作成する照合部と、
前記欠陥大きさ画像から欠陥候補を検出する欠陥候補検出部と、
前記欠陥候補が検出された場合、当該欠陥候補の前記第2の輪郭線からの距離を算出する欠陥位置判定部と
を有することを特徴とする半導体検査システム。
【請求項13】
請求項12に記載の半導体検査システムにおいて、
前記距離の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項14】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第1の輪郭線と前記第2の輪郭線とを照合し、差分輪郭線を作成する照合部と、
前記差分輪郭線の大きさを判定する欠陥大きさ判定部と
を有することを特徴とする半導体検査システム。
【請求項15】
請求項14に記載の半導体検査システムにおいて、
前記差分輪郭線の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項16】
請求項15に記載の半導体検査システムにおいて、
前記判定処理により欠陥であると判定された場合に、計測の実行を許容するか否かを判定する計測可能判定部を有する
ことを特徴とする半導体検査システム。
【請求項1】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第2の輪郭線から参照距離画像を作成する距離画像作成部と、
前記第1の輪郭線と前記参照距離画像とを照合し、欠陥大きさ画像を作成する照合部と、
前記欠陥大きさ画像から欠陥候補を検出する欠陥候補検出部と、
前記欠陥候補が検出された場合、その大きさを算出する欠陥大きさ判定部と
を有することを特徴とする半導体検査システム。
【請求項2】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項3】
請求項2に記載の半導体検査システムにおいて、
前記欠陥候補の大きさは、欠陥候補の面積である
ことを特徴とする半導体検査システム。
【請求項4】
請求項2に記載の半導体検査システムにおいて、
欠陥か否かを判定するための閾値を入力する入力装置を有する
ことを特徴とする半導体検査システム。
【請求項5】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補がその大きさにより欠陥であると判定された場合に、計測の実行を許容するか否かを判定する計測可能判定部を有する
ことを特徴とする半導体検査システム。
【請求項6】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、各画素と前記参照距離画像が重なる位置の輝度値を付与することにより、前記欠陥大きさ画像を作成する
ことを特徴とする半導体検査システム。
【請求項7】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、各画素と前記参照距離画像が重なる位置の輝度値と、前記第1の輪郭線の接線方向と、前記参照距離画像の傾きとに基づいて算出される輝度値を付与することにより、前記欠陥大きさ画像を作成する
ことを特徴とする半導体検査システム。
【請求項8】
請求項1に記載の半導体検査システムにおいて、
前記照合部は、前記第1の輪郭線上の各画素に対し、
各画素と前記参照距離画像が重なる位置の輝度値を付与することにより、前記欠陥大きさ画像を作成する第1の方法と、
各画素と前記参照距離画像が重なる位置の輝度値と、前記第1の輪郭線の接線方向と、前記参照距離画像の傾きとに基づいて算出される輝度値を付与することにより、前記欠陥大きさ画像を作成する第2の方法のいずれかを選択的に適用する
ことを特徴とする半導体検査システム。
【請求項9】
請求項8に記載の半導体検査システムにおいて、
前記第1の方法と前記第2の方法の切り替えを前記照合部に対して指示入力する操作装置を有する
ことを特徴とする半導体検査システム。
【請求項10】
請求項1に記載の半導体検査システムにおいて、
前記欠陥候補が検出された場合、当該欠陥候補の前記第2の輪郭線からの距離を算出し、当該距離と前記欠陥候補の大きさとに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項11】
請求項10に記載の半導体検査システムにおいて、
欠陥か否かを判定するための閾値を入力する入力装置を有する
ことを特徴とする半導体検査システム。
【請求項12】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第2の輪郭線から参照距離画像を作成する距離画像作成部と、
前記第1の輪郭線と前記参照距離画像とを照合し、欠陥大きさ画像を作成する照合部と、
前記欠陥大きさ画像から欠陥候補を検出する欠陥候補検出部と、
前記欠陥候補が検出された場合、当該欠陥候補の前記第2の輪郭線からの距離を算出する欠陥位置判定部と
を有することを特徴とする半導体検査システム。
【請求項13】
請求項12に記載の半導体検査システムにおいて、
前記距離の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項14】
半導体検査システムにおいて、
荷電粒子線を試料に照射して検査画像を取得する検査画像取得部と、
前記検査画像から第1の輪郭線を抽出する第1の輪郭線抽出部と、
前記検査画像に対応する参照画像から第2の輪郭線を抽出する第2の輪郭線抽出部と、
前記第1の輪郭線と前記第2の輪郭線とを照合し、差分輪郭線を作成する照合部と、
前記差分輪郭線の大きさを判定する欠陥大きさ判定部と
を有することを特徴とする半導体検査システム。
【請求項15】
請求項14に記載の半導体検査システムにおいて、
前記差分輪郭線の大きさに基づいて欠陥か否かを判定する
ことを特徴とする半導体検査システム。
【請求項16】
請求項15に記載の半導体検査システムにおいて、
前記判定処理により欠陥であると判定された場合に、計測の実行を許容するか否かを判定する計測可能判定部を有する
ことを特徴とする半導体検査システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−29386(P2013−29386A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−164782(P2011−164782)
【出願日】平成23年7月27日(2011.7.27)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月27日(2011.7.27)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]