
半導体集積回路、磁気検出装置、電子方位計
【課題】全ダイナミックレンジで出力線形性を維持し、出力特性の良好さを維持する。
【解決手段】励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、この三角波電流の極性が切り替わるタイミングで磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出する際に、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、少なくとも前記三角波の頂点より前に該三角波周期Tの1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、を有する。
【解決手段】励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、この三角波電流の極性が切り替わるタイミングで磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出する際に、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、少なくとも前記三角波の頂点より前に該三角波周期Tの1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体集積回路、磁気検出装置、電子方位計に係り、特に、フラックスゲート型の磁気センサに用いて好適な技術に関する。
【背景技術】
【0002】
磁界検出センサとして、高透磁率磁性コアのB-H特性が入力磁界によりシフトすることを利用したフラックスゲート型磁気センサが使用されている。これは、ホール素子や磁気抵抗素子等を用いた磁気センサに比べて分解能が高く、また温度安定性が優れているという特徴を持つ。
【0003】
フラックスゲート型の磁気センサとしては、地磁気などの外部磁界を入力磁界として受け、その入力磁界の大きさを検出する磁界検出部を備える。この磁界検出部は、一例として、磁気コアと、この磁気コアに巻回され、磁気コアを励磁する励磁コイルと、磁気コアに巻回され、磁気コア内の磁気変動に応じて誘起される電圧を検出する検出コイル(ピックアップコイル)とで構成されるものが知られている。(特許文献1、2、非特許文献1参照)
【0004】
このようなフラックスゲート型磁気センサにおいては、励磁コイルに三角波電流を供給し、電流供給時間中、磁気コア内の磁束が反転する際に発生するスパイク状電圧波形(ピックアップ波形)の発生する時間間隔をカウンタにより計測する方法が提案されている。このスパイク状電圧波形は、センサが置かれた環境の被測定磁界(外部磁界)の有無や強さによって時間軸上をシフトするため、それが検出される時間間隔を用いることにより、被測定磁界を検出することができる。
【0005】
これは、三角波の励磁電流を流して磁性体コアを励磁し、ピックアップコイルに現れる出力電圧の最大値を与える位相が被測定磁界によって変化した際、この変化した正負のピーク電圧の位相差(時間差)を検出して被測定磁界の値に換算するものである。また、位相の検出は、例えば励磁波形が頂点となる励磁三角波の絶対値が最大になる点に同期して開始される。
【0006】
しかし、ピックアップコイルに現れる電圧は、磁性体コアのインダクタンス変化を検出していることから、インダクタンス変化量が少ない励磁三角波の絶対値最大値付近では、ピックアップ電圧の絶対値が低下する。このため、被測定磁界に対する位相差の変化量も励磁三角波の絶対値最大付近におけるセンサ出力の線形性が悪化する。つまり、カウンタの動作時間をダイナミックレンジとした場合、励磁三角波の絶対値最大付近での線形性悪化に対応して、ダイナミックレンジ両端でのセンサ出力線形性が悪化する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−147947号公報
【特許文献2】特開平09−152473号公報
【非特許文献】
【0008】
【非特許文献1】G. Trenkler: “Die Messung schwacher magnetischer Felder mittels Magnetometer mit direkter Zeitverschlusselung” ,Messtechnik, 205, (1970)
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、全ダイナミックレンジで出力線形性を維持し、出力特性の良好なフラックスゲート型磁気検出装置を動作可能な半導体集積回路と、このフラックスゲート型磁気検出装置と電子方位計とを提供可能とすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の請求項1にかかる半導体集積回路は、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサに用いられる半導体集積回路であって、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することにより上記課題を解決した。
本発明の請求項2にかかる半導体集積回路は、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項1記載の半導体回路である。
本発明の請求項3にかかる磁気検出装置路は、磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサ部と
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有する半導体集積回路と、
を具備してなることにより上記課題を解決した。
本発明の請求項4にかかる磁気検出装置路は、前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項3記載の磁気検出装置である。
本発明の請求項5にかかる電子方位計は、基板と、
前記基板上に配置され、3軸のそれぞれに沿うように配置された第1、第2および第3のフラックスゲート型の磁気センサ部と、
半導体集積回路と、
を含み、
前記第1、第2および第3の磁気センサ部の各々は、
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するものとされ、
前記半導体集積回路は、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することにより上記課題を解決した。
本発明の請求項6にかかる電子方位計は、前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項5記載の電子方位計である。
【発明の効果】
【0011】
本発明によれば、信号強度が小さくなり三角波頂点付近である停止時間における外部磁界強度の出力を停止することにより、出力の線形性悪化を防止することが可能となるという効果を奏することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態を示す模式図である。
【図2】図2は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における磁界検出の方法を説明するための図であって、(a)は印加する三角波電流の一例を示すグラフ、(b)は磁気コアにおける磁化状態の変化を示すグラフ、(c)は得られるスパイク状電圧波形を示すグラフ、(d)は磁気ヒステリシスカーブを示すグラフである。
【図3】図3は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における励磁波形とスパイク状電圧波形および時間間隔との関係を示すグラフであり、(a)は外部磁界なし、(b)は正の外部磁界有り、(c)は負の外部磁界有りの場合を示すものである。
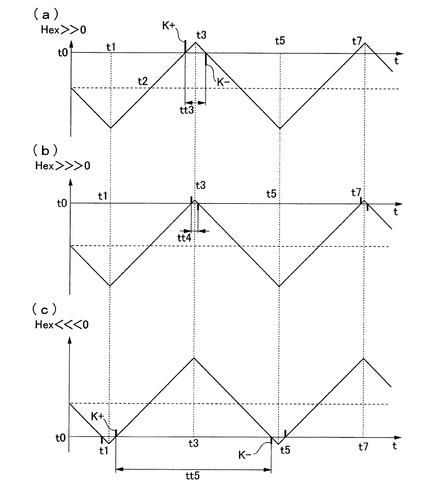
【図4】図4は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における励磁波形とスパイク状電圧波形および時間間隔との関係を示すグラフであり、(a)は大きな正の外部磁界有り、(b)はさらに大きな正の外部磁界有り、(c)は大きな負の外部磁界有りの場合を示すものである。
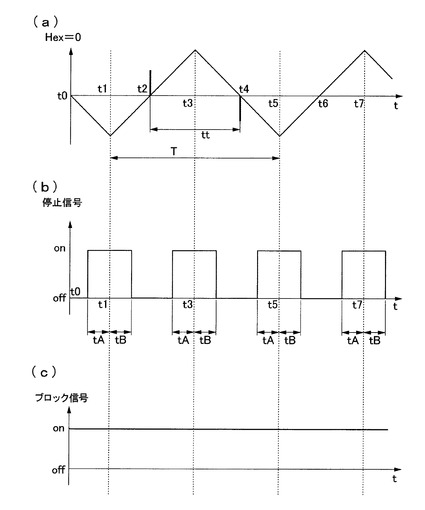
【図5】図5は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における動作を示すグラフであり、(a)は励磁波形とスパイク状電圧波形の関係を示すグラフであり、(b)はクロック制御回路による停止信号の出力を、(c)はクロック生成回路によるクロック信号を示すものである。
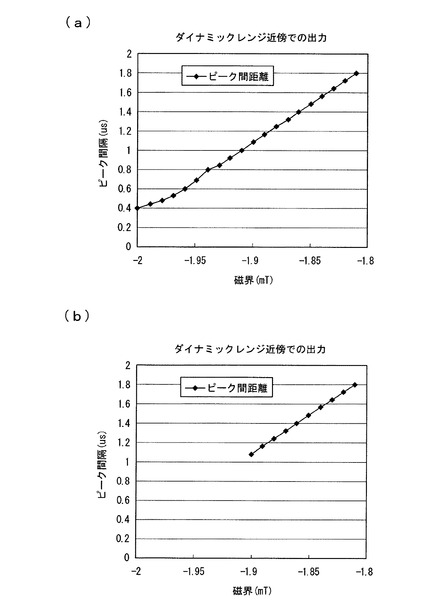
【図6】図6は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態においてダイナミックレンジ端付近における励磁磁界とピーク間隔(時間間隔)との関係を示すグラフであり、(a)停止信号により出力停止しない場合、(b)停止信号により出力停止した場合を示すものである。
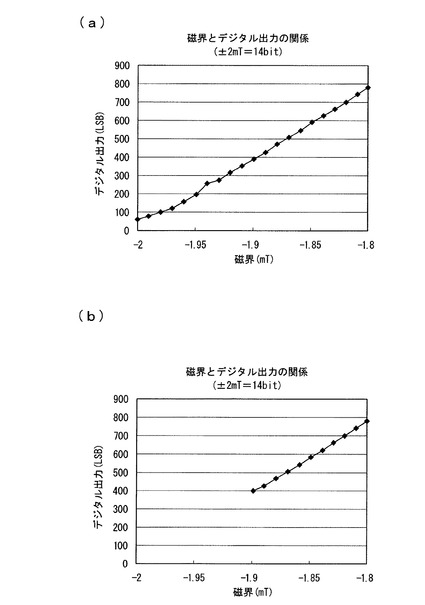
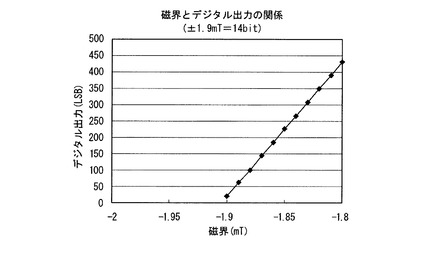
【図7】図7は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態においてダイナミックレンジ端付近における励磁磁界とデジタル出力(LSB)との関係を示すグラフであり、(a)停止信号により出力停止しない場合、(b)停止信号により出力停止した場合を示すものである。
【図8】図8は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態において図7の停止信号により出力停止した場合にダイナミックレンジ端付近における励磁磁界とピーク間隔(時間間隔)との関係を示すグラフである。
【図9】図9は、本発明に係る半導体集積回路および磁気検出装置の第3実施形態における磁気センサ部を示す平面図である。
【図10】図10は、図9に示す磁気センサ部を図9中に記載のa−a’線で切断した縦断面図である。
【図11】図11は、図9に示す磁気センサ部子を図9中に記載のb−b’線で切断した縦断面図である。
【図12】図12は、図9に示す磁気センサ部が備える磁気コア部分を示す平面図である。
【図13】図13は、本発明に係る半導体集積回路および磁気検出装置の第4実施形態における磁気センサ部の磁気コアを示す平面図である。
【図14】図14は、本発明に係る半導体集積回路および磁気検出装置の第4実施形態における磁気センサ部の磁気コアの他の例を示す平面図である。
【図15】図15は、本発明に係る半導体集積回路および磁気検出装置の第2実施形態における磁気センサ部を概略的に示す上面図である。
【図16】図16は、図15におけるラインa−a’に沿って切断した断面図である。
【図17】図17は、図15におけるラインb−b’に沿って切った断面図で、磁気センサ部の作製工程を示す図である。
【図18】図18は、本発明に係る電子方位計の実施形態を示す概略斜視図である。
【図19】図19は、本発明に係る半導体集積回路および磁気検出装置の実施形態における他の励磁波形を示す例を示すものである。
【図20】図20は、本発明に係る半導体集積回路および磁気検出装置の実施例において外部磁場の印加方法の一例を示す模式図である。
【図21】図21は、本発明に係る半導体集積回路および磁気検出装置の実施例において外部磁場の印加方法の他の例を示す模式図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る磁気センサ部および半導体集積回路からなる磁気検出装置の第1実施形態を、図面に基づいて説明する。
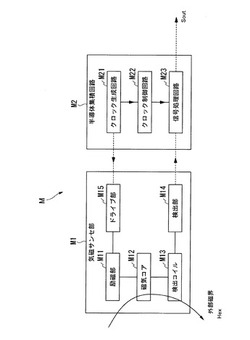
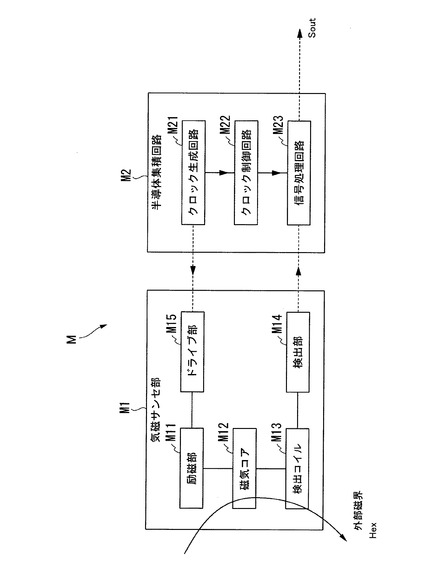
図1は、本実施形態における磁気センサ部および半導体集積回路からなる磁気検出装置の機能要素と、各機能要素同士の関係を示す模式図であり、図において、符号Mは、磁気検出装置である。
【0014】
本実施形態の磁気検出装置Mは、図1に示すように、フラックスゲート型の磁気センサ部M1と半導体集積回路M2とを有する。図1において、各機能要素を結ぶ実線は電気的な接続を、点線は電磁気的な接続を、矢印は電気信号の方向を示している。
磁気センサ部M1と半導体集積回路M2とは、磁性体コアM12と、磁性体コアM12内の磁束の変化を検出する検出コイルM13と、供給される周期的な励磁電流に伴って磁性体コア内の磁束を変化させる励磁手段と、励磁手段による磁性体コアM12内の磁束の変化に伴って検出コイルM13に発生する誘導出力を検出する検出手段(検出部)M14と、クロック生成回路M21と、このクロック生成回路M21から出力されるクロック信号に基づき、検出手段M14で検出された符号の異なる誘導出力の時間間隔に基づいて外部磁界強度の強度信号を演算・出力する信号処理回路M23と、少なくとも前記三角波の頂点より前に該三角波周期の特定の割合(%)とされる前方停止時間tA、および、前記三角波の頂点から後に前記三角波周期の特定の割合(%)の時間とされる後方停止時間tBにおいて、信号処理回路M23からの強度信号出力Soutを停止する停止信号を出力するように制御するクロック制御回路M22と、を有する。
励磁手段は、磁気コアM12近傍に設けられ励磁コイルとされる励磁部M11とこの励磁部M11に励磁電流を供給し励磁部の励磁状態を制御するドライブ部M15とからなる構成とすること、または、励磁手段は、磁気コアM12そのものとされこれに励磁電流を印加して磁気コアM12および検出コイルM13近傍を励磁する構成とすることなど、必要な励磁が可能な構成であればその構成は限定されない。
【0015】
磁気センサ部M1は、励磁電流として三角波電流を磁性体コアM12に対する励磁手段に通電し、磁性体コアM12に対して設けられた検出コイルM13から出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出する。
【0016】
半導体集積回路M2は、クロック生成回路M21と、検出手段M14と、ドライブ部M15と、信号処理回路M23と、クロック制御回路M22とを有するものとされ、停止信号がoffである場合に磁気センサ部M1からのデータにより出力信号Soutを出力するよう構成されてなる。
【0017】
クロック制御回路M22において出力される停止信号は、後述するように、クロック生成回路M21のクロック信号に基づき停止時間tAおよび停止時間tBにおいて、信号処理回路M23での外部磁界強度の強度信号算出動作を停止する制御とする構成か、信号処理回路M23での強度信号算出動作は行うが、その出力を停止する制御とする構成とすることができる。なお、停止時間tAおよび停止時間tBに関しては後述する。
【0018】
次に、前記構成の本実施形態の磁気検出装置Mの動作および検出された符号の異なる誘導出力の時間間隔に基づいた外部磁界強度の検出方法(磁界検出方法)について説明する。なお、ここでは、励磁部(励磁手段)として励磁部M11に対して三角波電流を通電する場合を例にして説明する。
【0019】
まず、外部磁界の測定・検出を行う検出時間が開始すると、半導体集積回路M2のクロック生成回路M21から連続するクロック信号を発生するとともに、このクロック信号に基づき、励磁部M11を励磁するための交流電流を供給するドライブ部M15において交流電源をonにする。
【0020】
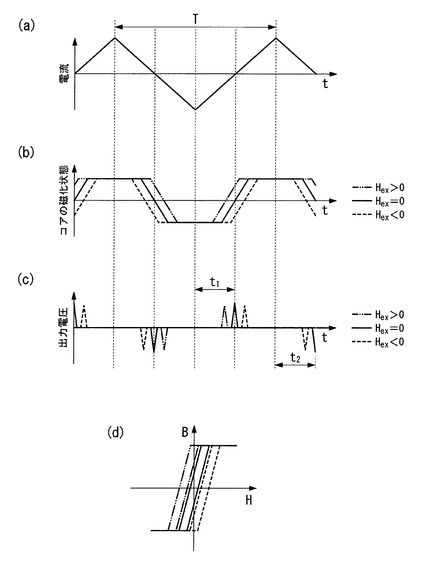
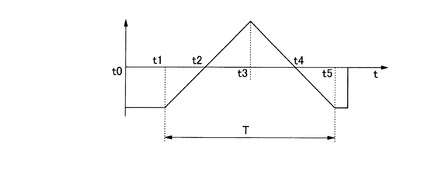
ここで、交流電源が供給する電流パターンとして、周期Tで極性反転型の三角波形電流の一例を図2(a)に示す。
ドライブ部M15から供給された三角波電流により磁気コアM12が励磁され、図2(d)に示すように、磁気コアM12にB−Hカーブに沿った磁束が生じる。この軟磁性体からなる磁気コアM12における磁化状態(磁束密度)の経時変化を図2(b)に示す。図2(b)に示すように、磁気コアM12には、長手方向の磁束が向きを変えて交互に生じる。ここで、図2(b)中の実線は、磁気センサ部M1を外部磁界が実質的に存在しない環境(Hex=0)に置いた場合の磁気コアM12の磁化状態の経時変化、図2(b)中の二点鎖線は、磁気センサ部M1を正方向の外部磁界中(Hex>0)に置いた場合の磁気コアM12の磁化状態の経時変化、図2(b)中の点線は、磁気センサ部M1を負方向の外部磁界中(Hex<0)に置いた場合の磁気コアM12の磁化状態の経時変化である。
【0021】
磁気コアM12に生じた磁束は検出コイルM13と交差して誘導電圧(誘導電流)を発生させる。そして、検出コイルM13に発生した誘導電圧は、検出コイルM13の出力端子から出力電圧として検出部M14に出力される。
このとき、図2(c)に示すように、各出力端子から検出される出力電圧波形としては、磁気コアM12に生じる磁束の向きが正方向から負方向に反転するタイミングと、負方向から正方向に反転するタイミングとで、互いに逆向きのスパイク状の電圧波形(スパイク波)が出力される。半導体集積回路M2中の検出部M14は、このスパイク波を増幅するとともに、カウント可能なように信号処理回路M23に出力する。
【0022】
ここで、図2(c)中の実線は、磁気センサ部M1を外部磁界が実質的に存在しない環境(Hex=0)に置いた場合の出力電圧波形、図2(c)中の二点鎖線は、磁気センサ部M1を正方向の外部磁界中(Hex>0)に置いた場合の出力電圧波形、図2(c)中の点線は、磁気センサ部M1を負方向の外部磁界中(Hex<0)に置いた場合の出力電圧波形である。このように外部磁界中では、外部磁界が実質的に存在しない場合に比べてスパイク状の電圧波形の位置が、外部磁界の向きおよび強さに応じて図中右側または左側となる時間軸t上でシフトする。
この出力電圧波形において、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて式(1)〜(3)に従い、所定の演算を行うことにより、外部磁界強度を算出することができる。この式(1)〜(3)において、t1は、正の誘導電圧が発生する時間を示し、t2は、負の誘導電圧が発生する時間を示し、Hexcは、励磁磁界(励磁手段にて発生する磁界)を示し、Hcは、磁気コアの保磁力を示し、Hextは、外部磁界を示し、Tdは遅延時間を示す。
【0023】
【数1】

【数2】
【数3】
【0024】
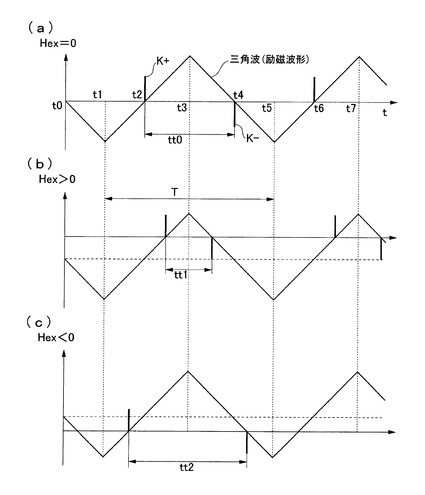
半導体集積回路M2においては、時刻t1、時刻t3、時刻t5、時刻t7のときに頂点となるように図2(a)に示した周期Tの三角波電流が通電されるようドライブ手段M15へクロック信号が出力される。また、外部磁界が存在しない(Hex=0)場合、図3(a)に示すように、三角波の極性が負から正へ反転する時刻t2、時刻t6のときに正符号のスパイク状電圧波形K+が、また、三角波の極性が正から負へ反転する時刻t4のときに負符号のスパイク状電圧波形K−がそれぞれ検出されて、磁気センサ部M1から信号処理回路M23に入力される。このときの正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt0が、外部磁界Hex=0のときの基準時間間隔とされる。
【0025】
正符号の外部磁界が存在する(Hex>0)の場合には、図3(b)に示すように、同様に、時刻t1、時刻t3、時刻t5、時刻t7のときに三角波電流が頂点となるが、外部磁界の存在により三角波の極性が反転する時刻が異なる(シフトする)ため、信号処理回路M23においては、時間間隔tt0よりも短くなった正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt1を、この基準時間間隔tt0と比較することにより正の外部磁界の大きさを算出する。ここで、正の外部磁界の存在により、極性の反転する時刻が時刻t2、時刻t6からずれ、かつ、t1、t3、t5に近づいた場合、スパイク状電圧波形の絶対値(信号強度)は小さくなる。
【0026】
負符号の外部磁界が存在する(Hex<0)のとき、図3(c)に示すように、同様に、時刻t1、時刻t3、時刻t5、時刻t7のときに三角波電流が頂点となるが、外部磁界の存在により三角波の極性が反転する時刻が異なるため、信号処理回路M23においては、時間間隔tt0より長くなった正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt2を、この基準時間間隔tt0と比較することにより負の外部磁界の大きさを算出する。同様に負符号の外部磁界の存在により、極性の反転する時刻が時刻t2、時刻t6からずれ、かつ、t1、t3、t5に近づいた場合、スパイク状電圧波形の絶対値(信号強度)は小さくなる。
【0027】
このように、スパイク状電圧波形の絶対値は、t1、t3、t5のように、三角波電流の頂点に近づくと減少する。例えば、図4(a)に示すように、図3(b)に示したより大きな正符号の外部磁界が存在し(Hex>>0)、スパイク状電圧波形の発生時刻が三角波の頂点時刻t3または時刻t7に近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt3は、時間間隔tt1よりもさらに短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)が減少する。
【0028】
また、図4(b)に示すように、図4(a)に示したよりさらに大きな正符号の外部磁界が存在し(Hex>>>0)スパイク状電圧波形の発生時刻が三角波の頂点時刻t3または時刻t7によりいっそう近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt4は、時間間隔tt3よりもさらに短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)もが減少する。
【0029】
同様に、図4(c)に示すように、図4(b)に示した磁界と同程度の絶対値の大きさである負符号の外部磁界が存在し(Hex<<<0)スパイク状電圧波形の発生時刻が三角波の頂点時刻t1または時刻t5に近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt5は、時間間隔tt4と同程度に短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)も同程度に減少する。
【0030】
このように、絶対値の大きさ(強度)の減少したスパイク状電圧波形K+、K−を外部磁界強度の算出に用いずに出力精度(線形性)を維持するために、半導体集積回路M2においては、クロック制御回路M22において、クロック生成回路M21から出力されるクロック信号に基づき、三角波の頂点付近である時刻t1、時刻t3、時刻t5、時刻t7の前後に信号処理回路M23からの強度信号出力Soutを停止する制御をonとなる停止信号を出力する。停止信号は、図5(b)に示すように、三角波の頂点となる時刻t1、時刻t3、時刻t5、時刻t7より時間的に前側で周期Tの0.1〜5%とされる前方停止時間tA、および、前記三角波の頂点となる時刻t1、時刻t3、時刻t5、時刻t7から後に周期Tの0.1〜5%とされる後方停止時間tBの間に出力される。また、クロック信号は、図5(c)に示すように、図5(a)に示す三角波とされる励磁電流が印加される検出時間中クロック生成回路M21から出力される。
【0031】
前方停止時間tAは、周期Tの0.1〜5%とされることができ、より好ましくは、周期Tの0.1〜3%とされ、また、周期Tの0.1〜1%とすることができる。
後方停止時間tBは、周期Tの0.1〜5%とされることができ、より好ましくは、周期Tの0.1〜3%とされ、また、周期Tの0.1〜1%とすることができる。
前方停止時間tAと後方停止時間tBとは等しい長さに設定することや、どちらか片方を短くする、連続する三角波ごとに異なる長さとするといった各種の設定とすることができる。また、前方停止時間tAと後方停止時間tBとのどちらかのみ停止信号を出力することも可能である。
【0032】
本実施形態の半導体集積回路M2においては、前方停止時間tAと後方停止時間tBとにおいて、信号処理回路M23からの強度信号出力Soutを停止する停止信号を出力するクロック制御回路M22を有することにより、三角波の頂点付近の時刻において外部磁界強度の強度信号を出力しないことにより、出力の線形性を維持することが可能となる。
具体的には、図6(a)に示すように、三角波において負符号の励磁磁界が−2mT付近までの場合に、図6(b)に示すように、−1.9mT付近から−2mT付近までとなる停止時間tAだけ停止信号を出力して、信号処理回路M23において外部磁界強度の強度信号を出力しないことにより、全出力範囲において線形性を維持することが可能となることがわかる。なお、図6においては、三角波頂点付近、すなわち、ダイナミックレンジ端近傍のみを示しておりこれ以外では線形性を維持している。また、図6に対応する強度信号としてのデジタル出力を図7に示す。負符号の励磁磁界が−2mT付近までの場合、この範囲の出力が、たとえば14bitとされるデジタル出力(LSB;Least Significant Bit)に出力していた場合、デジタル出力の上限は15984程度となる。
【0033】
また、本実施形態においては、上述したように、停止信号によりデジタル出力を三角波形磁界の頂点以外を除いた出力範囲の−.9mT〜+1.9mTの範囲とする。そしてこの範囲の出力を、図8に示すように、たとえば14bitとされるデジタル出力(LSB)に換算する。これにより、デジタル出力の上限は、16382となる。これにより、線形性を保った状態でデジタル出力のフルスケールを使用することが可能となる。
【0034】
以下に本発明の磁気検出装置Mの第2実施形態を説明する。本実施形態においては、磁気センサ部の具体的構成を例示する。
【0035】
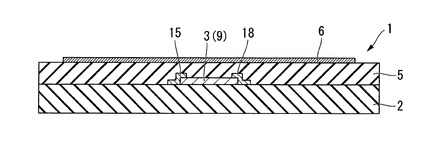
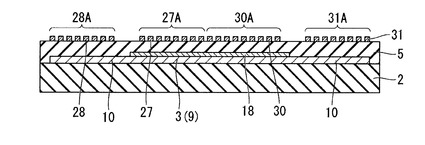
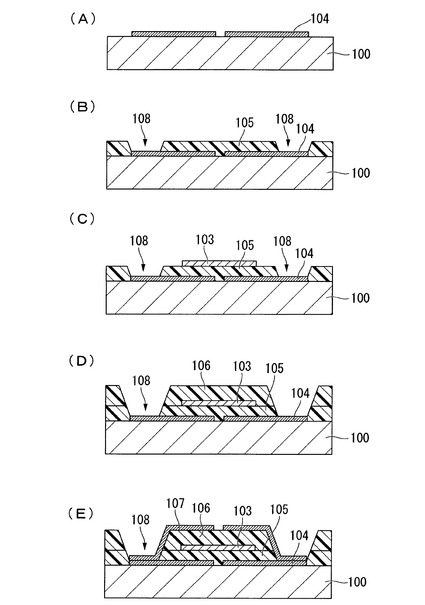
図15は、本実施形態に係る磁気センサ部を概略的に示す上面図である。図16は、図15におけるラインa−a’に沿って切った断面図である。図17(A)−図17(E)は、図15におけるラインb−b’に沿って切った断面図で、磁気センサ部の作成工程を示す図である。
【0036】
本実施形態の磁気センサ部は、図15−図16に示すように、磁気コア103と、第1配線層104と、第1絶縁層105と、第2絶縁層106と、第2配線層107と、開口部108と、基板100とを含む。磁気コア103は、端部分101と、中央部分102とを含む。第1配線層104及び第2配線層107は、端部分101に巻き回された第1のソレノイドコイル109及び中央部分102に巻き回された第2のソレノイドコイル110を構成している。
【0037】
本実施形態において、端部分101に巻き回された第1のソレノイドコイル109は励磁部とされる励磁コイルである。中央部分102に巻き回された第2のソレノイドコイル110はピックアップコイル(検出コイル)である。本実施形態において、端部分101は励磁部分であり、中央部分102は検出部分である。
【0038】
図17(A)−図17(E)を用いて、本実施形態の磁気センサ部の作製工程について説明する。まず、図17(A)のように、非磁性の基板100の上に、ソレノイドコイルの下側配線を形成するための第1配線層104が形成される。次に、図17(B)のように、第1配線層104の上に、磁気コア103とソレノイドコイルを絶縁するための第1絶縁層105とが形成される。ここで、この第1絶縁層105においては、第1配線層104と、後に形成されるソレノイドコイルの上側配線となる第2配線層107とが接続される部分に、開口部108が設けられる。
【0039】
次に、図17(C)のように、第1絶縁層105の上には、軟磁性体膜からなる磁気コア103が形成される。この軟磁性体膜からなる磁気コア103の形状は、図15に示す通り、その中央部分102における幅が端部分101における幅よりも狭くなっている。
【0040】
次に、図17(D)のように、磁気コア103の上には、第1配線層104と第2配線層107の接続部に開口部108を設けた第2絶縁層106が形成される。さらに、図17(E)のように、第2絶縁層106の上に、第2配線層107が、第1配線層104の隣接する配線どうしをその端部にて接続するように形成され、それによりソレノイドコイルを形成している。配線は、隣接する配線と接続されるため、断面におけるソレノイドコイルのループは閉じない。
【0041】
第1配線層104および第2配線層107により形成された第1のソレノイドコイル109及び第2のソレノイドコイル110は、磁気コア103の両端の幅の広い端部分101と幅の狭い中央部分102において、それぞれ独立に巻き回されている。両端の幅の広い端部分101に巻き回されている第1のソレノイドコイル109は、一方の端の端部分101に巻き回されている第3のソレノイドコイルと、もう一方の端の端部分1に巻き回されている第4のソレノイドコイルとを含む。両端の端部における第3のソレノイドコイル及び第4のソレノイドコイルが直列に、かつ発生する磁界方向が同一となるように第1配線層104もしくは第2配線層107により接続されていて、それにより全体として第1のソレノイドコイル109を形成している。磁気コア103の中央部分102に巻き回された第2のソレノイドコイル110の両端には、外部と接続するための電極パッド111が形成されている。磁気コア103の両端の端部分101に巻き回された2つの直列に接続された第1のソレノイドコイル109の両端には、外部と接続するための電極パッド112が形成されている。
【0042】
磁気コア3の両端の端部分1にそれぞれ巻き回された第3のソレノイドコイル及び第4のソレノイドコイルは、巻き数が同じで対称であることが好ましい。
【0043】
なお、図15は、模式的に示されており、第1のソレノイドコイル9及び第2のソレノイドコイル10に関し、磁気コア3の下側配線の一部が省略されている。また、第1のソレノイドコイル9および第2のソレノイドコイル10の形状は、図15で示された形状に限定されない。
【0044】
本実施形態における第1配線層104と第2配線層107の位置関係は、図16の形状に限定されない。また、本実施形態における磁気センサ部の形状は、図17(A)−図17(E)の形状に限定されない。
【0045】
磁気コア103の両端の幅の広い端部分101は、その周囲に巻き回された第1のソレノイドコイル109に通電することにより励磁される。一方、磁気コア103の幅の狭い中央部分102には誘導電圧がかかり、その誘導電圧は中央部分102の周囲に巻き回された第2のソレノイドコイル110により検出される。
【0046】
外部より電極パッド112を介して、時間的に変化する交流電流を、磁気コア103の端部分101の第1のソレノイドコイル(励磁部)109に対して通電することにより、磁気コア103が交流励磁される。端部分101において発生した磁束は、磁気コア103の中央部分102に導かれる。これにより磁気コア103の中央部分102も交流励磁されて、中央部分102の第2のソレノイドコイル(検出コイル)110に略パルス状の誘導電圧が発生する。この誘導電圧は第2のソレノイドコイル110および電極パッド111を介して外部の検出回路で検出できる。ここで、第1のソレノイドコイル109に通電される交流電流は、一定周波数の三角波であることが望ましい。
【0047】
なお、上述の実施形態においては、磁気コアとして図15に示したものを挙げたが、本発明の趣旨における磁気コアの形状はこれに限られることはなく、その端部分における幅が、中央部分における幅よりも広くなっていれば、いかなる形状であってもよい。また、前述の構成に加えて、第2配線層107を覆う封止層が形成されていてもよい。
第1配線層104の厚さは、0.2μm〜2μm程度が好ましい。第1絶縁層105の厚さは、第1配線層104の凹凸を緩和するだけの十分な厚さ、具体的には第1配線層104の厚さの3〜10倍程度であることが望ましい。これらの配線層は、Cu、Al、Auとすることができる。磁気コア103となる軟磁性体膜としては、CoNbZrおよびCoTaZr等に代表される零磁歪のCo系アモルファス膜や、NiFe合金、CoFe合金などが望ましい。第2配線層107は、Ti、Cr、TiWなどのバリアメタル膜から形成されることができる。必要に応じて外部に接続するための電極パッドおよび端子としては、はんだバンプおよび金バンプ、ならびにワイヤボンディング等の一般的な半導体デバイスや薄膜デバイスに用いられる手法を適用することができる。
【0048】
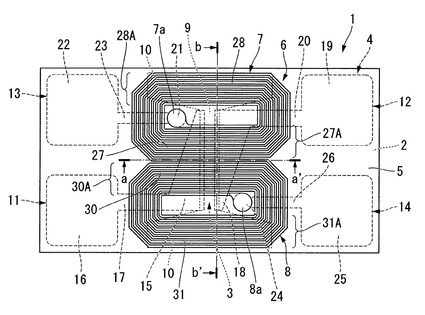
図9は、本発明の磁気検出装置の第3実施形態における磁気センサ部を示す平面図、図10は、図9に示す磁気センサ部を図9中に示すa−a’線で切断した縦断面図、図11は、図9に示す磁気センサ部を図9中に示すb−b’線で切断した縦断面図、図12は、図9に示す磁気センサ部が備える磁気コアを示す平面図である。
【0049】
図9〜図11に示す磁気センサ部は、非磁性基板2と、該非磁性基板2上に設けられた磁気コア3および導体層4と、これら各部の上に絶縁層5を介し設けられたピックアップコイル(検出コイル)6とを有しており、ピックアップコイル6は第1コイル部7と第2コイル部8とで構成されている。第1コイル部7と第2コイル部8は、図9に示す如く巻き方向(電流の流れる方向)が平面視逆向きでこれらは電気的に直列になるように接続され、非磁性基板2の上面中央側に平面視上下に隣接配置されている。
【0050】
非磁性基板2は、本実施形態の磁気センサ部を構成する各部を支持するものであり、非磁性基板2としては、例えばシリコン(Si)、ガラス、セラミックス等の非磁性体よりなる基板が挙げられる。
磁気コア3は、図11に拡大して示す如く平面視帯状をなす通電部(励磁部)9と、通電部9の両端部に設けられた一対の集磁部10、10とを有し、全体が軟磁性薄膜によって構成されている。
軟磁性薄膜としては、一軸異方性を付与できるものであれば特に限定されないが、アモルファス組成のCo85Nb12Zr3膜、FeNi合金膜、FeSiAl合金膜、CoFeSiB合金膜などの軟磁性薄膜等を用いることができる。
【0051】
前記通電部9には、後述する第1通電用電極15および第2通電用電極18を介して幅方向(後述する順方向ライン27および30に対して略平行方向)に三角波電流(時間的に変化する電流)が供給される。これにより、通電部9は、その長手方向に励磁される。そして、外部磁界の中に置かれた状態では、通電部9に外部磁界の磁束が引き込まれ、励磁によって生じる磁束に重畳されるようになっている。
【0052】
一対の集磁部10、10は、互いに略同じ形状とされ、それぞれ、通電部9よりも幅広とされている。各集磁部10、10は、帯状の通電部9の長手方向両端部に対し接続し、通電部9とともに全体としてI字型になるように非磁性基板2の上面中央側に形成されている。
また、この磁気センサ部において、磁気コア3は、2つのスパイラルコイル部7、8の渦巻き中心間より外側の逆相磁界発生部28A、31Aに平面視重なるように集磁部10、10を配置し、2つのスパイラルコイル部7、8の渦巻き中心を結ぶ直線に平行になるように通電部9を配置するように非磁性基板2上に形成されている。
各集磁部10は通電部9よりも幅が広くなったパターンとして形成されるが、この幅が広がった形状とは、図4に示す如く通電部9と集磁部10との境界部分またはその近傍において、これらを構成する軟磁性薄膜の幅がテーパを有して徐々に広がっている形状や段階的(ステップ状)に広がっている形状を問わない。なお、一方の集磁部10と他方の集磁部10はそれらの平面形状が違っていても差し支えなく、非対称であっても対称形状であっても良い。
【0053】
一対の集磁部10、10は、通電部9とともに外部磁界を引き込むように作用し、これにより通電部9により多くの磁束を引き込むことができる。また、磁気コア3に励磁の際に生じる反磁界の影響を低減することができる。その結果、磁気センサ部の感度を高めることができる作用を奏する。
【0054】
導体層4は、非磁性基板2のコーナー部に設けられた第1通電用導体部11および第2通電用導体部12と、第1出力用導体部13および第2出力用導体部14とを有する。
第1通電用導体部11は、その一部が通電部9の長手方向に沿う一方の辺縁部(図9の左側の辺縁部)と重なるように設けられた第1通電用電極15と、ドライブ部の交流電源に接続される第1通電用電極パッド16と、第1通電用電極15と第1通電用電極パッド16とを接続する第1通電用配線17とによって構成されている。
【0055】
また、第2通電用導体部12は、その一部が通電部9の長手方向に沿う他方の辺縁部(図9の右側の辺縁部)と重なるように設けられた第2通電用電極18と、外部の交流電源に接続される第2通電用電極パッド19と、第2通電用電極18と第2通電用電極パッド19とを接続する第2通電用配線20とによって構成されている。非磁性基板2上において、図9に示す如く平面視した場合に第2通電用導体部12は、第1通電用導体部11に対して略点対称位置に形成されている。
【0056】
第1通電用電極パッド16および第2通電用電極パッド19に接続された交流電源から交流が供給されると、第1通電用電極パッド16からの電流は、第1通電用配線17および第1通電用電極15を介して通電部9に供給され、通電部9の幅方向を左から右に向かって流れる。また、第2通電用電極パッド19からの電流は、第2通電用配線20および第2通電用電極18を介して通電部9に供給され、通電部9の幅方向を右から左に向かって流れる。このように互いに逆向きの電流が交互に流れることにより、通電部9が、その長手方向に励磁される。
【0057】
一方、第1出力用導体部13は、ピックアップコイル6の第1コイル部7の中心側の出力端7aに電気的に接続された第1出力用電極21と、外部の検出回路に接続される第1出力用電極パッド22と、前記第1出力用電極21と第1出力用電極パッド22とを接続する第1出力用配線23によって構成されており、第1通電用導体部11に隣り合うように形成されている。
【0058】
また、第2出力用導体部14は、ピックアップコイル6の第2コイル部8の中心側の出力端8aに接続された第2出力用電極24と、外部の検出回路に接続される第2出力用電極パッド25と、前記第2出力用電極24と第2出力用電極パッド25とを接続する第2出力用配線26によって構成されており、非磁性基板2上において第1出力用導体部13に対して略点対称位置に配置されている。
第1コイル部7および第2コイル部8で生じた誘導電圧は、第1出力用電極21と第2出力用電極24との間の出力電圧として検出回路で検出される。
【0059】
絶縁層5は、磁気コア3および導体層4と、ピックアップコイル6とを絶縁するように非磁性基板2上に形成されている。
絶縁層5は、非磁性基板2、磁気コア3および導体層4の上に全面的に設けられ、各出力用電極21、24に対応する位置にスルーホールが設けられている。スルーホール内には上下導通用の導体が充填され、これにより、各出力用電極21、24と第1コイル部7および第2コイル部8の各出力端7a、8aとが電気的に接続されている。
絶縁層5を構成する材料は、感光性ポリイミドなどの絶縁性樹脂の他、SiO2やAl2O3等の金属酸化物、Si3N4やAlN等の金属窒化物などを例示することができる。
【0060】
ピックアップコイル6を構成する第1コイル部7および第2コイル部8について説明すると、それぞれ、スパイラル状のパターンで形成された導体薄膜によって構成されており、より具体的に、各コイル部7、8は、中心から外側に反時計回りに延在された配線(導体薄膜)によって構成され、ピックアップコイル6全体で略8の字状をなすように、各コイル部7、8の最外周の配線同士が連続されている。このピックアップコイル6では、各コイル部7、8の中心側の端部が該ピックアップコイル6で生じた誘導電圧を出力する出力端7a、8aを構成する。なお、各コイル部7、8は、中心から外側に時計回りに延在された配線によって構成されていても良い。
【0061】
ここで、第1コイル部7の配線は、通電部9の幅方向と略平行となるように並列した複数の順方向ライン27よりなる順方向ライン群(同相磁界発生部)27Aと、順方向ライン群27Aと離間して配され、通電部9の幅方向と略平行となるように並列した複数の逆方向ライン28よりなる逆方向ライン群(逆相磁界発生部)28Aとを有し、順方向ライン群27Aが逆方向ライン群28Aよりも第2コイル部8側となるように配されている。
また、第2コイル部8の配線も、同様に、複数の順方向ライン30よりなる順方向ライン群(同相磁界発生部)30A、複数の逆方向ライン31よりなる逆方向ライン群(逆相磁界発生部)31Aとを有し、順方向ライン群30Aが逆方向ライン群31Aよりも第1コイル部7側となるように配されている。
【0062】
そして、各コイル部7、8において、各順方向ライン27、30は通電部9を幅方向に横切るように該通電部9と重なっており、各逆方向ライン28、31は図1に示す如く平面視集磁部10、10と重なっている。
なお、本実施形態において、第1コイル部7と第2コイル部8の同相磁界発生部とは、第1コイル部7と第2コイル部8のそれぞれの中心部の間の領域、すなわち、第1コイル部7の中心部と、第2コイル部8の中心部との間の領域である。これに対して、第1コイル部7と第2コイル部8のそれぞれの中心部から、非磁性基板2の外側よりの領域、例えば図9において、第1コイル部7の中心部より上側の領域および第2コイル部8の中心部より下側の領域は、逆相磁界発生部とされる。
【0063】
前記構造の通電部9の寸法は、特に限定されるものではないが、電子方位計としての使用可能とするために、通電部9と集磁部10、10を合わせた長手方向の長さを0.5mmとすることを想定すると、一例として、通電部9の長さを250μm程度、幅を30μm程度、集磁部10の幅と長さを125μm程度とすることができる。
【0064】
次に、前記構成の磁気センサ部としての動作において上述した第1実施形態における説明に対して追加する部分について説明する。
ドライブ部M15の交流電源から供給された三角波電流は、各通電用電極15、18を介して通電部9に供給され、通電部9の幅方向に沿って流れる。これにより、通電部9が励磁され、その長手方向にB−Hカーブに沿った磁束が生じる。図2(b)に示すように、通電部9には、長手方向の磁束が向きを変えて交互に生じる。
通電部9に生じた磁束はピックアップコイル6の各順方向ライン27、30と交差し、各順方向ライン群(同相磁界発生部)27A、30Aに誘導電圧(誘導電流)を発生させる。そして、ピックアップコイル6に発生した誘導電圧は、ピックアップコイル6の各出力端7a、8aから出力電圧としてスパイク波が検出される。
【0065】
このように構成された磁気センサ部は、従来必要であった励磁コイルを用いずに、磁気コア3の通電部9に直接電流を通電することによって、通電部9を長手方向に励磁する構成のため、次のような効果を得ることができる。
(1)磁気コア3に励磁コイルを巻回すプロセスを省略でき、構造を単純にすることができる。
(2)励磁コイルを巻回すのに必要な領域を省略できるため、その分ピックアップコイル6を多く巻回すことができる。その結果、出力を大きくとることができるため、SN比を向上させることができる。
(3)磁気コア3を励磁コイルによって励磁する場合、磁気コア3の長さを短くすると、反磁界の影響が大きくなって励磁効率が低下するため、大電流による通電が必要となる。これに対して、磁気コア3に直接電流を通電することによって励磁すると、励磁の際に反磁界の影響を小さくすることができる。このため、小さい電流で動作させることができ、低消費電力化が可能となる。
(4)また、励磁の際に反磁界の影響が小さいため、センサ素子の小型化が可能であり、小型、薄型の電子方位計の構成が可能である。
【0066】
また、本実施形態の磁気センサ素子1では、ピックアップコイル6としてスパイラル状コイルを用い、磁気コア3の通電部9近傍にスパイラル状コイルの同相磁界発生部27A、30Aを配しているため、次のような効果を得ることができる。
(A)逆相磁界発生部28A、31Aにおける磁束変化の影響を取り除くことができ、SN比の向上が可能である。
(B)逆相磁界発生部28A、31Aに配した軟磁性薄膜の領域を集磁構造として用いることが可能となるため、感度の向上が可能である。
以上の理由から、感度、出力およびSN比を十分に確保しつつ、磁気センサ素子1の小型化が可能である。
【0067】
また、この磁気センサ素子1では、通電部9の励磁によって生じる磁束の方向が、平行フラックスゲートセンサと同様に通電部9の長手方向であるため、前述のように通電部9に三角波電流を通電した場合には、この三角波電流の極性が切り替わるタイミングで出力されるスパイク状電圧波形を検出し、このスパイク状電圧波形の発生する時間間隔をカウンタにて計測することにより、この時間間隔に基づいて外部磁界強度を算出することができる。このような磁界の検出方法では、外部磁界強度の算出過程でヒステリシスの影響を取り除くことができるとともに、カウンタを用いたデジタル検出が可能であるため、AD変換時の誤差の影響を取り除くことができる。このため、検出値のリニアリティが良く、外部磁界強度を精度よく検出することができる。
【0068】
なお、本実施形態の磁気センサ部において、各部の形状は前述のものに限るものではない。
【0069】
以下、本発明の磁気検出装置の第4実施形態における磁気センサ部について、図面に基づいて説明する。図13及び図14は、本実施形態に係る磁気センサ部における磁気コアの形状の一例を示す平面図である。
【0070】
本実施形態における磁気センサ部の磁気コアは、図13及び図14に示すように、端部分101と中央部分102とを有する。端部分101の幅Bは、中央部分102の幅Cよりも広い。磁気コアの長手方向の長さAは、1mm以下、望ましくは0.5mm以下である。端部分101の幅Bと端部分101の長手方向の長さDの比B/Dの値は1よりも小さい。磁気センサ部の磁気コアの長手方向は、磁気センサ部の感磁方向と一致している。図13及び図14では図示していないが、端部分1の周囲には、励磁コイルが巻き回され、中央部分102の周囲には、ピックアップコイルが巻き回される。
図13は、磁気コアの端部分の形状が角型の場合の例を示す平面図である。図14は、磁気コアが端部分101と中央部分102との境界にテーパ形状を有する場合の例を示す平面図である。角部での磁束の局所的な飽和を抑えるためには、図14に示すように、端部分101と中央部分102の境界が略テーパ状になっていることが望ましい。この場合、端部分101の長手方向の長さDは略テーパ状の部分を含む長さを表わすこととすると、端部分101の幅Bと端部分101の長手方向の長さDの比B/Dの値が、1よりも小さいことが望ましい。
【0071】
磁性薄膜においては、膜厚方向と面内方向の比率が、数100〜数1000程度と大きい。従って、反磁界係数は膜厚方向と面内方向で数100〜数1000倍の違いがあり、面内方向の反磁界係数は非常に小さい。磁性薄膜を、長手方向を有する形状にパターニングした場合、長手方向と幅方向の寸法比によって反磁界係数が決定される。この場合、長手方向の反磁界係数は小さく、幅方向の反磁界係数は大きくなるため、形状異方性は、長手方向が容易軸となる。
【0072】
上述したように、本実施形態の磁気センサ部は、磁気コアに中央部分102よりも幅の広い端部分101を有し、端部分101の幅Bは端部分101の長手方向の長さDよりも小さい。端部分101の形状異方性による容易軸は、磁気センサ部の長手方向である。従って、感磁方向と直交する磁界によるコア内の磁束密度の変化が少なく、他軸感度特性が良好である。これにより、方位精度の優れた電子方位計を構成することが可能である。
【0073】
【数4】
【0074】
上述した式(3)より、外部磁界に対する時間間隔の変化t2−t1は、外部磁界Hextと励磁コイルの作る磁界Hexcの比Hext/Hexcおよび三角波の周期Tに依存することが分かる。外部磁界に対する感度S=d(t2−t1)/dHextは、励磁コイルに通電する電流振幅Iexc、励磁コイルに流れる単位電流当たりの発生磁界すなわち励磁効率α、及び三角波の周期Tを用いて、S=T/(2・Iexc×α)で表される。よって、励磁電流が大きいほど、センサの感度Sは小さくなる。三角波の周期Tが大きいすなわち励磁周波数fexcが小さいほど、センサの感度Sは大きくなる。
【0075】
励磁効率αは、磁気センサ部を構成する磁気コアとコイルの巻き数によって決定される値である。励磁効率αが大きいほど、少ない電流でフラックスゲートセンサを駆動することができる。また、式(3)において、Hext=Hexcとなるとき式(3)は0となり、このときのHextが測定磁界範囲の上限となる。Hexc=α×Iexcで表されることから、励磁効率αが大きいほど、同一の電流で駆動した場合に広い測定磁界範囲を有することとなる。
【0076】
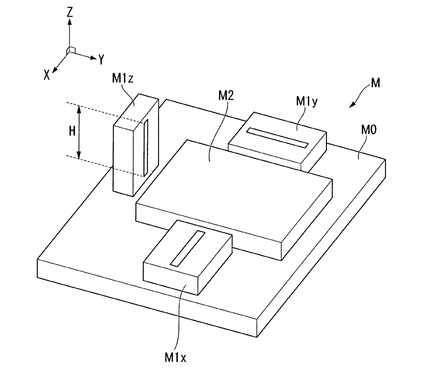
次に、本発明の実施形態における電子方位計を説明する。図18は、本実施形態に係る電子方位計の概略斜視図である。
【0077】
図18に示した電子方位計は、第1フラックスゲート(X軸)センサM1x、第2フラックスゲート(Y軸)センサM1y、第3フラックスゲート(Z軸)センサM1z、および信号処理用IC(半導体集積回路)M2を、1つの基板M0上に配置することにより構成される。第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zはそれぞれ、上述の各実施形態で説明した磁気センサ部M1とされる。
【0078】
具体的には、第1フラックスゲートセンサM1xおよび第2フラックスゲートセンサM1yは、電子方位計を構成する基板面に対して、その形成された面が略平行となるように、かつ感磁方向が互いに直交するように配置される。また、第3フラックスゲートセンサM1zは、電子方位計を構成する基板面に対して略垂直となるように配置される。このとき、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zは、外部との接続端子を除いた領域、すなわち磁気コアおよび励磁部、検出コイルを形成する部分の形状が同一であることが望ましい。これは、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれの特性を揃えることにより、各センサの特性のばらつきを補正する必要がなく、電子回路を簡略化できるようにするためである。また、第3フラックスゲートセンサM1zは、基板面に対して略垂直に実装されるので、電子方位計の厚さを薄くするためには、その感磁方向の長さが、1mm以下、さらに好ましくは0.5mm程度であることが望ましい。
【0079】
また、信号処理用ICM2は、誘導電圧が発生するタイミングを計数するためのカウンタM21、停止信号を出力するカウンタ制御回路M22と信号処理回路M23とを有する上述の半導体集積回路M2に加え、各フラックスゲートセンサにおける励磁部に一定周波数の三角波電流を通電するドライブ部M15としての回路と、検出コイルM13に現れる誘導電圧を検出するための検出部M14としての回路と、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれに対して上記の回路との接続を切り替えるためのセレクタとを備えている。かかる構成により、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zで3軸方向それぞれの磁界を順次計測し、演算を行うことで方位誤差の小さい電子方位計を実現することができる。
【0080】
また、本発明の電子方位計においては、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれに、少なくとも停止信号を出力するカウンタ制御回路M22を含む回路を設ける構成とすることもできる。
この場合、線形性を保った出力を第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれで行うことが可能となる。
【0081】
上記の各実施形態において、連続する複数の同一形状の三角波による検出を行ったが、図19に示すように、単一の三角波による検出も可能である。この場合、検出時間の開始となる時刻t1においては、三角波の頂点における励磁磁界の大きさがその前から同じになるようにしておき、三角波形状の励磁を行った後、検出時間の終了となる時刻t5から後も、三角波の頂点における励磁磁界と同じ大きさを維持することが好ましい。この場合でも三角波の周期Tに対して、停止信号の出力される停止時間は上述したように設定されることになる。
【0082】
<実施例>
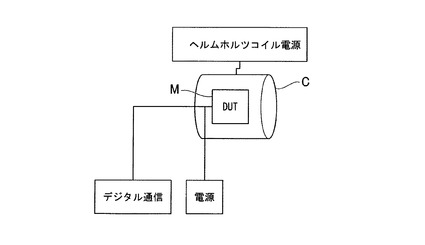
図20または図21に示すように、ヘルムホルツコイルC内に、図15に示す第3実施形態と同様の磁気検出装置Mを載置して、−2〜+2mTで変動する外部磁界を印加して、スパイク状電圧波形のピーク間隔を直接出力するとともに、これを、外部磁界の強度信号となるデジタル出力として出力させた。
【0083】
磁気センサ部における磁気コアの形状は、磁気コアの長手方向の長さA=480μm、端部分1の幅B=80μm、中央部分102の幅C=20μm、端部分101の長手方向の長さD=140μm、励磁コイルの巻き数は16.5、ピックアップコイルの巻き数は6.5とした。
三角波電流は、振幅100mA、周波数30kHzとし、正負のパルス状ピックアップ電圧がそれぞれの基準電圧Vthを超える時間間隔tの外部磁界依存性、すなわち外部磁界に対する磁気検出装置Mの出力を示すグラフを図6(a)に示す。
【0084】
この外部磁界のピーク付近で出力しない停止信号をクロック制御回路から出力した場合の磁気検出装置Mのピーク間隔(μm)を図6(b)に示す。またこれらに対応するデジタル出力を図7に示す。
【0085】
これらの結果により、停止信号によりデジタル出力を三角波形磁界の頂点以外を除いた出力範囲の−.9mT〜+1.9mTの範囲とする。そしてこの範囲の出力を、図8に示すように、たとえば14bitとされるデジタル出力(LSB)に換算する。これにより、デジタル出力の上限は、16384程度となる。これにより、線形性を保った状態でデジタル出力のフルスケールを使用することが可能となることがわかる。
【符号の説明】
【0086】
M…磁気検出装置、M1…磁気センサ部、M2…半導体集積回路、M11…励磁部、M12…磁気コア、M13…検出コイル、M14…検出部、M15…ドライブ部、M21…クロック生成回路、M22…クロック制御回路、M23…信号処理回路
【技術分野】
【0001】
本発明は、半導体集積回路、磁気検出装置、電子方位計に係り、特に、フラックスゲート型の磁気センサに用いて好適な技術に関する。
【背景技術】
【0002】
磁界検出センサとして、高透磁率磁性コアのB-H特性が入力磁界によりシフトすることを利用したフラックスゲート型磁気センサが使用されている。これは、ホール素子や磁気抵抗素子等を用いた磁気センサに比べて分解能が高く、また温度安定性が優れているという特徴を持つ。
【0003】
フラックスゲート型の磁気センサとしては、地磁気などの外部磁界を入力磁界として受け、その入力磁界の大きさを検出する磁界検出部を備える。この磁界検出部は、一例として、磁気コアと、この磁気コアに巻回され、磁気コアを励磁する励磁コイルと、磁気コアに巻回され、磁気コア内の磁気変動に応じて誘起される電圧を検出する検出コイル(ピックアップコイル)とで構成されるものが知られている。(特許文献1、2、非特許文献1参照)
【0004】
このようなフラックスゲート型磁気センサにおいては、励磁コイルに三角波電流を供給し、電流供給時間中、磁気コア内の磁束が反転する際に発生するスパイク状電圧波形(ピックアップ波形)の発生する時間間隔をカウンタにより計測する方法が提案されている。このスパイク状電圧波形は、センサが置かれた環境の被測定磁界(外部磁界)の有無や強さによって時間軸上をシフトするため、それが検出される時間間隔を用いることにより、被測定磁界を検出することができる。
【0005】
これは、三角波の励磁電流を流して磁性体コアを励磁し、ピックアップコイルに現れる出力電圧の最大値を与える位相が被測定磁界によって変化した際、この変化した正負のピーク電圧の位相差(時間差)を検出して被測定磁界の値に換算するものである。また、位相の検出は、例えば励磁波形が頂点となる励磁三角波の絶対値が最大になる点に同期して開始される。
【0006】
しかし、ピックアップコイルに現れる電圧は、磁性体コアのインダクタンス変化を検出していることから、インダクタンス変化量が少ない励磁三角波の絶対値最大値付近では、ピックアップ電圧の絶対値が低下する。このため、被測定磁界に対する位相差の変化量も励磁三角波の絶対値最大付近におけるセンサ出力の線形性が悪化する。つまり、カウンタの動作時間をダイナミックレンジとした場合、励磁三角波の絶対値最大付近での線形性悪化に対応して、ダイナミックレンジ両端でのセンサ出力線形性が悪化する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−147947号公報
【特許文献2】特開平09−152473号公報
【非特許文献】
【0008】
【非特許文献1】G. Trenkler: “Die Messung schwacher magnetischer Felder mittels Magnetometer mit direkter Zeitverschlusselung” ,Messtechnik, 205, (1970)
【発明の概要】
【発明が解決しようとする課題】
【0009】
本発明は、全ダイナミックレンジで出力線形性を維持し、出力特性の良好なフラックスゲート型磁気検出装置を動作可能な半導体集積回路と、このフラックスゲート型磁気検出装置と電子方位計とを提供可能とすることを目的とする。
【課題を解決するための手段】
【0010】
本発明の請求項1にかかる半導体集積回路は、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサに用いられる半導体集積回路であって、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することにより上記課題を解決した。
本発明の請求項2にかかる半導体集積回路は、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項1記載の半導体回路である。
本発明の請求項3にかかる磁気検出装置路は、磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサ部と
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有する半導体集積回路と、
を具備してなることにより上記課題を解決した。
本発明の請求項4にかかる磁気検出装置路は、前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項3記載の磁気検出装置である。
本発明の請求項5にかかる電子方位計は、基板と、
前記基板上に配置され、3軸のそれぞれに沿うように配置された第1、第2および第3のフラックスゲート型の磁気センサ部と、
半導体集積回路と、
を含み、
前記第1、第2および第3の磁気センサ部の各々は、
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するものとされ、
前記半導体集積回路は、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することにより上記課題を解決した。
本発明の請求項6にかかる電子方位計は、前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項5記載の電子方位計である。
【発明の効果】
【0011】
本発明によれば、信号強度が小さくなり三角波頂点付近である停止時間における外部磁界強度の出力を停止することにより、出力の線形性悪化を防止することが可能となるという効果を奏することができる。
【図面の簡単な説明】
【0012】
【図1】図1は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態を示す模式図である。
【図2】図2は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における磁界検出の方法を説明するための図であって、(a)は印加する三角波電流の一例を示すグラフ、(b)は磁気コアにおける磁化状態の変化を示すグラフ、(c)は得られるスパイク状電圧波形を示すグラフ、(d)は磁気ヒステリシスカーブを示すグラフである。
【図3】図3は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における励磁波形とスパイク状電圧波形および時間間隔との関係を示すグラフであり、(a)は外部磁界なし、(b)は正の外部磁界有り、(c)は負の外部磁界有りの場合を示すものである。
【図4】図4は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における励磁波形とスパイク状電圧波形および時間間隔との関係を示すグラフであり、(a)は大きな正の外部磁界有り、(b)はさらに大きな正の外部磁界有り、(c)は大きな負の外部磁界有りの場合を示すものである。
【図5】図5は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態における動作を示すグラフであり、(a)は励磁波形とスパイク状電圧波形の関係を示すグラフであり、(b)はクロック制御回路による停止信号の出力を、(c)はクロック生成回路によるクロック信号を示すものである。
【図6】図6は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態においてダイナミックレンジ端付近における励磁磁界とピーク間隔(時間間隔)との関係を示すグラフであり、(a)停止信号により出力停止しない場合、(b)停止信号により出力停止した場合を示すものである。
【図7】図7は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態においてダイナミックレンジ端付近における励磁磁界とデジタル出力(LSB)との関係を示すグラフであり、(a)停止信号により出力停止しない場合、(b)停止信号により出力停止した場合を示すものである。
【図8】図8は、本発明に係る半導体集積回路および磁気検出装置の第1実施形態において図7の停止信号により出力停止した場合にダイナミックレンジ端付近における励磁磁界とピーク間隔(時間間隔)との関係を示すグラフである。
【図9】図9は、本発明に係る半導体集積回路および磁気検出装置の第3実施形態における磁気センサ部を示す平面図である。
【図10】図10は、図9に示す磁気センサ部を図9中に記載のa−a’線で切断した縦断面図である。
【図11】図11は、図9に示す磁気センサ部子を図9中に記載のb−b’線で切断した縦断面図である。
【図12】図12は、図9に示す磁気センサ部が備える磁気コア部分を示す平面図である。
【図13】図13は、本発明に係る半導体集積回路および磁気検出装置の第4実施形態における磁気センサ部の磁気コアを示す平面図である。
【図14】図14は、本発明に係る半導体集積回路および磁気検出装置の第4実施形態における磁気センサ部の磁気コアの他の例を示す平面図である。
【図15】図15は、本発明に係る半導体集積回路および磁気検出装置の第2実施形態における磁気センサ部を概略的に示す上面図である。
【図16】図16は、図15におけるラインa−a’に沿って切断した断面図である。
【図17】図17は、図15におけるラインb−b’に沿って切った断面図で、磁気センサ部の作製工程を示す図である。
【図18】図18は、本発明に係る電子方位計の実施形態を示す概略斜視図である。
【図19】図19は、本発明に係る半導体集積回路および磁気検出装置の実施形態における他の励磁波形を示す例を示すものである。
【図20】図20は、本発明に係る半導体集積回路および磁気検出装置の実施例において外部磁場の印加方法の一例を示す模式図である。
【図21】図21は、本発明に係る半導体集積回路および磁気検出装置の実施例において外部磁場の印加方法の他の例を示す模式図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る磁気センサ部および半導体集積回路からなる磁気検出装置の第1実施形態を、図面に基づいて説明する。
図1は、本実施形態における磁気センサ部および半導体集積回路からなる磁気検出装置の機能要素と、各機能要素同士の関係を示す模式図であり、図において、符号Mは、磁気検出装置である。
【0014】
本実施形態の磁気検出装置Mは、図1に示すように、フラックスゲート型の磁気センサ部M1と半導体集積回路M2とを有する。図1において、各機能要素を結ぶ実線は電気的な接続を、点線は電磁気的な接続を、矢印は電気信号の方向を示している。
磁気センサ部M1と半導体集積回路M2とは、磁性体コアM12と、磁性体コアM12内の磁束の変化を検出する検出コイルM13と、供給される周期的な励磁電流に伴って磁性体コア内の磁束を変化させる励磁手段と、励磁手段による磁性体コアM12内の磁束の変化に伴って検出コイルM13に発生する誘導出力を検出する検出手段(検出部)M14と、クロック生成回路M21と、このクロック生成回路M21から出力されるクロック信号に基づき、検出手段M14で検出された符号の異なる誘導出力の時間間隔に基づいて外部磁界強度の強度信号を演算・出力する信号処理回路M23と、少なくとも前記三角波の頂点より前に該三角波周期の特定の割合(%)とされる前方停止時間tA、および、前記三角波の頂点から後に前記三角波周期の特定の割合(%)の時間とされる後方停止時間tBにおいて、信号処理回路M23からの強度信号出力Soutを停止する停止信号を出力するように制御するクロック制御回路M22と、を有する。
励磁手段は、磁気コアM12近傍に設けられ励磁コイルとされる励磁部M11とこの励磁部M11に励磁電流を供給し励磁部の励磁状態を制御するドライブ部M15とからなる構成とすること、または、励磁手段は、磁気コアM12そのものとされこれに励磁電流を印加して磁気コアM12および検出コイルM13近傍を励磁する構成とすることなど、必要な励磁が可能な構成であればその構成は限定されない。
【0015】
磁気センサ部M1は、励磁電流として三角波電流を磁性体コアM12に対する励磁手段に通電し、磁性体コアM12に対して設けられた検出コイルM13から出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出する。
【0016】
半導体集積回路M2は、クロック生成回路M21と、検出手段M14と、ドライブ部M15と、信号処理回路M23と、クロック制御回路M22とを有するものとされ、停止信号がoffである場合に磁気センサ部M1からのデータにより出力信号Soutを出力するよう構成されてなる。
【0017】
クロック制御回路M22において出力される停止信号は、後述するように、クロック生成回路M21のクロック信号に基づき停止時間tAおよび停止時間tBにおいて、信号処理回路M23での外部磁界強度の強度信号算出動作を停止する制御とする構成か、信号処理回路M23での強度信号算出動作は行うが、その出力を停止する制御とする構成とすることができる。なお、停止時間tAおよび停止時間tBに関しては後述する。
【0018】
次に、前記構成の本実施形態の磁気検出装置Mの動作および検出された符号の異なる誘導出力の時間間隔に基づいた外部磁界強度の検出方法(磁界検出方法)について説明する。なお、ここでは、励磁部(励磁手段)として励磁部M11に対して三角波電流を通電する場合を例にして説明する。
【0019】
まず、外部磁界の測定・検出を行う検出時間が開始すると、半導体集積回路M2のクロック生成回路M21から連続するクロック信号を発生するとともに、このクロック信号に基づき、励磁部M11を励磁するための交流電流を供給するドライブ部M15において交流電源をonにする。
【0020】
ここで、交流電源が供給する電流パターンとして、周期Tで極性反転型の三角波形電流の一例を図2(a)に示す。
ドライブ部M15から供給された三角波電流により磁気コアM12が励磁され、図2(d)に示すように、磁気コアM12にB−Hカーブに沿った磁束が生じる。この軟磁性体からなる磁気コアM12における磁化状態(磁束密度)の経時変化を図2(b)に示す。図2(b)に示すように、磁気コアM12には、長手方向の磁束が向きを変えて交互に生じる。ここで、図2(b)中の実線は、磁気センサ部M1を外部磁界が実質的に存在しない環境(Hex=0)に置いた場合の磁気コアM12の磁化状態の経時変化、図2(b)中の二点鎖線は、磁気センサ部M1を正方向の外部磁界中(Hex>0)に置いた場合の磁気コアM12の磁化状態の経時変化、図2(b)中の点線は、磁気センサ部M1を負方向の外部磁界中(Hex<0)に置いた場合の磁気コアM12の磁化状態の経時変化である。
【0021】
磁気コアM12に生じた磁束は検出コイルM13と交差して誘導電圧(誘導電流)を発生させる。そして、検出コイルM13に発生した誘導電圧は、検出コイルM13の出力端子から出力電圧として検出部M14に出力される。
このとき、図2(c)に示すように、各出力端子から検出される出力電圧波形としては、磁気コアM12に生じる磁束の向きが正方向から負方向に反転するタイミングと、負方向から正方向に反転するタイミングとで、互いに逆向きのスパイク状の電圧波形(スパイク波)が出力される。半導体集積回路M2中の検出部M14は、このスパイク波を増幅するとともに、カウント可能なように信号処理回路M23に出力する。
【0022】
ここで、図2(c)中の実線は、磁気センサ部M1を外部磁界が実質的に存在しない環境(Hex=0)に置いた場合の出力電圧波形、図2(c)中の二点鎖線は、磁気センサ部M1を正方向の外部磁界中(Hex>0)に置いた場合の出力電圧波形、図2(c)中の点線は、磁気センサ部M1を負方向の外部磁界中(Hex<0)に置いた場合の出力電圧波形である。このように外部磁界中では、外部磁界が実質的に存在しない場合に比べてスパイク状の電圧波形の位置が、外部磁界の向きおよび強さに応じて図中右側または左側となる時間軸t上でシフトする。
この出力電圧波形において、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて式(1)〜(3)に従い、所定の演算を行うことにより、外部磁界強度を算出することができる。この式(1)〜(3)において、t1は、正の誘導電圧が発生する時間を示し、t2は、負の誘導電圧が発生する時間を示し、Hexcは、励磁磁界(励磁手段にて発生する磁界)を示し、Hcは、磁気コアの保磁力を示し、Hextは、外部磁界を示し、Tdは遅延時間を示す。
【0023】
【数1】
【数2】
【数3】
【0024】
半導体集積回路M2においては、時刻t1、時刻t3、時刻t5、時刻t7のときに頂点となるように図2(a)に示した周期Tの三角波電流が通電されるようドライブ手段M15へクロック信号が出力される。また、外部磁界が存在しない(Hex=0)場合、図3(a)に示すように、三角波の極性が負から正へ反転する時刻t2、時刻t6のときに正符号のスパイク状電圧波形K+が、また、三角波の極性が正から負へ反転する時刻t4のときに負符号のスパイク状電圧波形K−がそれぞれ検出されて、磁気センサ部M1から信号処理回路M23に入力される。このときの正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt0が、外部磁界Hex=0のときの基準時間間隔とされる。
【0025】
正符号の外部磁界が存在する(Hex>0)の場合には、図3(b)に示すように、同様に、時刻t1、時刻t3、時刻t5、時刻t7のときに三角波電流が頂点となるが、外部磁界の存在により三角波の極性が反転する時刻が異なる(シフトする)ため、信号処理回路M23においては、時間間隔tt0よりも短くなった正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt1を、この基準時間間隔tt0と比較することにより正の外部磁界の大きさを算出する。ここで、正の外部磁界の存在により、極性の反転する時刻が時刻t2、時刻t6からずれ、かつ、t1、t3、t5に近づいた場合、スパイク状電圧波形の絶対値(信号強度)は小さくなる。
【0026】
負符号の外部磁界が存在する(Hex<0)のとき、図3(c)に示すように、同様に、時刻t1、時刻t3、時刻t5、時刻t7のときに三角波電流が頂点となるが、外部磁界の存在により三角波の極性が反転する時刻が異なるため、信号処理回路M23においては、時間間隔tt0より長くなった正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt2を、この基準時間間隔tt0と比較することにより負の外部磁界の大きさを算出する。同様に負符号の外部磁界の存在により、極性の反転する時刻が時刻t2、時刻t6からずれ、かつ、t1、t3、t5に近づいた場合、スパイク状電圧波形の絶対値(信号強度)は小さくなる。
【0027】
このように、スパイク状電圧波形の絶対値は、t1、t3、t5のように、三角波電流の頂点に近づくと減少する。例えば、図4(a)に示すように、図3(b)に示したより大きな正符号の外部磁界が存在し(Hex>>0)、スパイク状電圧波形の発生時刻が三角波の頂点時刻t3または時刻t7に近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt3は、時間間隔tt1よりもさらに短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)が減少する。
【0028】
また、図4(b)に示すように、図4(a)に示したよりさらに大きな正符号の外部磁界が存在し(Hex>>>0)スパイク状電圧波形の発生時刻が三角波の頂点時刻t3または時刻t7によりいっそう近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt4は、時間間隔tt3よりもさらに短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)もが減少する。
【0029】
同様に、図4(c)に示すように、図4(b)に示した磁界と同程度の絶対値の大きさである負符号の外部磁界が存在し(Hex<<<0)スパイク状電圧波形の発生時刻が三角波の頂点時刻t1または時刻t5に近づいた場合、正符号のスパイク状電圧波形K+と負符号のスパイク状電圧波形K−との時間間隔tt5は、時間間隔tt4と同程度に短くなるとともに、スパイク状電圧波形K+、K−の絶対値の大きさ(信号強度)も同程度に減少する。
【0030】
このように、絶対値の大きさ(強度)の減少したスパイク状電圧波形K+、K−を外部磁界強度の算出に用いずに出力精度(線形性)を維持するために、半導体集積回路M2においては、クロック制御回路M22において、クロック生成回路M21から出力されるクロック信号に基づき、三角波の頂点付近である時刻t1、時刻t3、時刻t5、時刻t7の前後に信号処理回路M23からの強度信号出力Soutを停止する制御をonとなる停止信号を出力する。停止信号は、図5(b)に示すように、三角波の頂点となる時刻t1、時刻t3、時刻t5、時刻t7より時間的に前側で周期Tの0.1〜5%とされる前方停止時間tA、および、前記三角波の頂点となる時刻t1、時刻t3、時刻t5、時刻t7から後に周期Tの0.1〜5%とされる後方停止時間tBの間に出力される。また、クロック信号は、図5(c)に示すように、図5(a)に示す三角波とされる励磁電流が印加される検出時間中クロック生成回路M21から出力される。
【0031】
前方停止時間tAは、周期Tの0.1〜5%とされることができ、より好ましくは、周期Tの0.1〜3%とされ、また、周期Tの0.1〜1%とすることができる。
後方停止時間tBは、周期Tの0.1〜5%とされることができ、より好ましくは、周期Tの0.1〜3%とされ、また、周期Tの0.1〜1%とすることができる。
前方停止時間tAと後方停止時間tBとは等しい長さに設定することや、どちらか片方を短くする、連続する三角波ごとに異なる長さとするといった各種の設定とすることができる。また、前方停止時間tAと後方停止時間tBとのどちらかのみ停止信号を出力することも可能である。
【0032】
本実施形態の半導体集積回路M2においては、前方停止時間tAと後方停止時間tBとにおいて、信号処理回路M23からの強度信号出力Soutを停止する停止信号を出力するクロック制御回路M22を有することにより、三角波の頂点付近の時刻において外部磁界強度の強度信号を出力しないことにより、出力の線形性を維持することが可能となる。
具体的には、図6(a)に示すように、三角波において負符号の励磁磁界が−2mT付近までの場合に、図6(b)に示すように、−1.9mT付近から−2mT付近までとなる停止時間tAだけ停止信号を出力して、信号処理回路M23において外部磁界強度の強度信号を出力しないことにより、全出力範囲において線形性を維持することが可能となることがわかる。なお、図6においては、三角波頂点付近、すなわち、ダイナミックレンジ端近傍のみを示しておりこれ以外では線形性を維持している。また、図6に対応する強度信号としてのデジタル出力を図7に示す。負符号の励磁磁界が−2mT付近までの場合、この範囲の出力が、たとえば14bitとされるデジタル出力(LSB;Least Significant Bit)に出力していた場合、デジタル出力の上限は15984程度となる。
【0033】
また、本実施形態においては、上述したように、停止信号によりデジタル出力を三角波形磁界の頂点以外を除いた出力範囲の−.9mT〜+1.9mTの範囲とする。そしてこの範囲の出力を、図8に示すように、たとえば14bitとされるデジタル出力(LSB)に換算する。これにより、デジタル出力の上限は、16382となる。これにより、線形性を保った状態でデジタル出力のフルスケールを使用することが可能となる。
【0034】
以下に本発明の磁気検出装置Mの第2実施形態を説明する。本実施形態においては、磁気センサ部の具体的構成を例示する。
【0035】
図15は、本実施形態に係る磁気センサ部を概略的に示す上面図である。図16は、図15におけるラインa−a’に沿って切った断面図である。図17(A)−図17(E)は、図15におけるラインb−b’に沿って切った断面図で、磁気センサ部の作成工程を示す図である。
【0036】
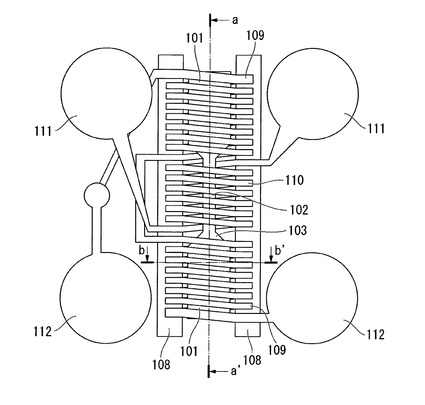
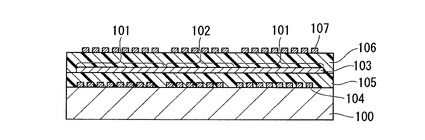
本実施形態の磁気センサ部は、図15−図16に示すように、磁気コア103と、第1配線層104と、第1絶縁層105と、第2絶縁層106と、第2配線層107と、開口部108と、基板100とを含む。磁気コア103は、端部分101と、中央部分102とを含む。第1配線層104及び第2配線層107は、端部分101に巻き回された第1のソレノイドコイル109及び中央部分102に巻き回された第2のソレノイドコイル110を構成している。
【0037】
本実施形態において、端部分101に巻き回された第1のソレノイドコイル109は励磁部とされる励磁コイルである。中央部分102に巻き回された第2のソレノイドコイル110はピックアップコイル(検出コイル)である。本実施形態において、端部分101は励磁部分であり、中央部分102は検出部分である。
【0038】
図17(A)−図17(E)を用いて、本実施形態の磁気センサ部の作製工程について説明する。まず、図17(A)のように、非磁性の基板100の上に、ソレノイドコイルの下側配線を形成するための第1配線層104が形成される。次に、図17(B)のように、第1配線層104の上に、磁気コア103とソレノイドコイルを絶縁するための第1絶縁層105とが形成される。ここで、この第1絶縁層105においては、第1配線層104と、後に形成されるソレノイドコイルの上側配線となる第2配線層107とが接続される部分に、開口部108が設けられる。
【0039】
次に、図17(C)のように、第1絶縁層105の上には、軟磁性体膜からなる磁気コア103が形成される。この軟磁性体膜からなる磁気コア103の形状は、図15に示す通り、その中央部分102における幅が端部分101における幅よりも狭くなっている。
【0040】
次に、図17(D)のように、磁気コア103の上には、第1配線層104と第2配線層107の接続部に開口部108を設けた第2絶縁層106が形成される。さらに、図17(E)のように、第2絶縁層106の上に、第2配線層107が、第1配線層104の隣接する配線どうしをその端部にて接続するように形成され、それによりソレノイドコイルを形成している。配線は、隣接する配線と接続されるため、断面におけるソレノイドコイルのループは閉じない。
【0041】
第1配線層104および第2配線層107により形成された第1のソレノイドコイル109及び第2のソレノイドコイル110は、磁気コア103の両端の幅の広い端部分101と幅の狭い中央部分102において、それぞれ独立に巻き回されている。両端の幅の広い端部分101に巻き回されている第1のソレノイドコイル109は、一方の端の端部分101に巻き回されている第3のソレノイドコイルと、もう一方の端の端部分1に巻き回されている第4のソレノイドコイルとを含む。両端の端部における第3のソレノイドコイル及び第4のソレノイドコイルが直列に、かつ発生する磁界方向が同一となるように第1配線層104もしくは第2配線層107により接続されていて、それにより全体として第1のソレノイドコイル109を形成している。磁気コア103の中央部分102に巻き回された第2のソレノイドコイル110の両端には、外部と接続するための電極パッド111が形成されている。磁気コア103の両端の端部分101に巻き回された2つの直列に接続された第1のソレノイドコイル109の両端には、外部と接続するための電極パッド112が形成されている。
【0042】
磁気コア3の両端の端部分1にそれぞれ巻き回された第3のソレノイドコイル及び第4のソレノイドコイルは、巻き数が同じで対称であることが好ましい。
【0043】
なお、図15は、模式的に示されており、第1のソレノイドコイル9及び第2のソレノイドコイル10に関し、磁気コア3の下側配線の一部が省略されている。また、第1のソレノイドコイル9および第2のソレノイドコイル10の形状は、図15で示された形状に限定されない。
【0044】
本実施形態における第1配線層104と第2配線層107の位置関係は、図16の形状に限定されない。また、本実施形態における磁気センサ部の形状は、図17(A)−図17(E)の形状に限定されない。
【0045】
磁気コア103の両端の幅の広い端部分101は、その周囲に巻き回された第1のソレノイドコイル109に通電することにより励磁される。一方、磁気コア103の幅の狭い中央部分102には誘導電圧がかかり、その誘導電圧は中央部分102の周囲に巻き回された第2のソレノイドコイル110により検出される。
【0046】
外部より電極パッド112を介して、時間的に変化する交流電流を、磁気コア103の端部分101の第1のソレノイドコイル(励磁部)109に対して通電することにより、磁気コア103が交流励磁される。端部分101において発生した磁束は、磁気コア103の中央部分102に導かれる。これにより磁気コア103の中央部分102も交流励磁されて、中央部分102の第2のソレノイドコイル(検出コイル)110に略パルス状の誘導電圧が発生する。この誘導電圧は第2のソレノイドコイル110および電極パッド111を介して外部の検出回路で検出できる。ここで、第1のソレノイドコイル109に通電される交流電流は、一定周波数の三角波であることが望ましい。
【0047】
なお、上述の実施形態においては、磁気コアとして図15に示したものを挙げたが、本発明の趣旨における磁気コアの形状はこれに限られることはなく、その端部分における幅が、中央部分における幅よりも広くなっていれば、いかなる形状であってもよい。また、前述の構成に加えて、第2配線層107を覆う封止層が形成されていてもよい。
第1配線層104の厚さは、0.2μm〜2μm程度が好ましい。第1絶縁層105の厚さは、第1配線層104の凹凸を緩和するだけの十分な厚さ、具体的には第1配線層104の厚さの3〜10倍程度であることが望ましい。これらの配線層は、Cu、Al、Auとすることができる。磁気コア103となる軟磁性体膜としては、CoNbZrおよびCoTaZr等に代表される零磁歪のCo系アモルファス膜や、NiFe合金、CoFe合金などが望ましい。第2配線層107は、Ti、Cr、TiWなどのバリアメタル膜から形成されることができる。必要に応じて外部に接続するための電極パッドおよび端子としては、はんだバンプおよび金バンプ、ならびにワイヤボンディング等の一般的な半導体デバイスや薄膜デバイスに用いられる手法を適用することができる。
【0048】
図9は、本発明の磁気検出装置の第3実施形態における磁気センサ部を示す平面図、図10は、図9に示す磁気センサ部を図9中に示すa−a’線で切断した縦断面図、図11は、図9に示す磁気センサ部を図9中に示すb−b’線で切断した縦断面図、図12は、図9に示す磁気センサ部が備える磁気コアを示す平面図である。
【0049】
図9〜図11に示す磁気センサ部は、非磁性基板2と、該非磁性基板2上に設けられた磁気コア3および導体層4と、これら各部の上に絶縁層5を介し設けられたピックアップコイル(検出コイル)6とを有しており、ピックアップコイル6は第1コイル部7と第2コイル部8とで構成されている。第1コイル部7と第2コイル部8は、図9に示す如く巻き方向(電流の流れる方向)が平面視逆向きでこれらは電気的に直列になるように接続され、非磁性基板2の上面中央側に平面視上下に隣接配置されている。
【0050】
非磁性基板2は、本実施形態の磁気センサ部を構成する各部を支持するものであり、非磁性基板2としては、例えばシリコン(Si)、ガラス、セラミックス等の非磁性体よりなる基板が挙げられる。
磁気コア3は、図11に拡大して示す如く平面視帯状をなす通電部(励磁部)9と、通電部9の両端部に設けられた一対の集磁部10、10とを有し、全体が軟磁性薄膜によって構成されている。
軟磁性薄膜としては、一軸異方性を付与できるものであれば特に限定されないが、アモルファス組成のCo85Nb12Zr3膜、FeNi合金膜、FeSiAl合金膜、CoFeSiB合金膜などの軟磁性薄膜等を用いることができる。
【0051】
前記通電部9には、後述する第1通電用電極15および第2通電用電極18を介して幅方向(後述する順方向ライン27および30に対して略平行方向)に三角波電流(時間的に変化する電流)が供給される。これにより、通電部9は、その長手方向に励磁される。そして、外部磁界の中に置かれた状態では、通電部9に外部磁界の磁束が引き込まれ、励磁によって生じる磁束に重畳されるようになっている。
【0052】
一対の集磁部10、10は、互いに略同じ形状とされ、それぞれ、通電部9よりも幅広とされている。各集磁部10、10は、帯状の通電部9の長手方向両端部に対し接続し、通電部9とともに全体としてI字型になるように非磁性基板2の上面中央側に形成されている。
また、この磁気センサ部において、磁気コア3は、2つのスパイラルコイル部7、8の渦巻き中心間より外側の逆相磁界発生部28A、31Aに平面視重なるように集磁部10、10を配置し、2つのスパイラルコイル部7、8の渦巻き中心を結ぶ直線に平行になるように通電部9を配置するように非磁性基板2上に形成されている。
各集磁部10は通電部9よりも幅が広くなったパターンとして形成されるが、この幅が広がった形状とは、図4に示す如く通電部9と集磁部10との境界部分またはその近傍において、これらを構成する軟磁性薄膜の幅がテーパを有して徐々に広がっている形状や段階的(ステップ状)に広がっている形状を問わない。なお、一方の集磁部10と他方の集磁部10はそれらの平面形状が違っていても差し支えなく、非対称であっても対称形状であっても良い。
【0053】
一対の集磁部10、10は、通電部9とともに外部磁界を引き込むように作用し、これにより通電部9により多くの磁束を引き込むことができる。また、磁気コア3に励磁の際に生じる反磁界の影響を低減することができる。その結果、磁気センサ部の感度を高めることができる作用を奏する。
【0054】
導体層4は、非磁性基板2のコーナー部に設けられた第1通電用導体部11および第2通電用導体部12と、第1出力用導体部13および第2出力用導体部14とを有する。
第1通電用導体部11は、その一部が通電部9の長手方向に沿う一方の辺縁部(図9の左側の辺縁部)と重なるように設けられた第1通電用電極15と、ドライブ部の交流電源に接続される第1通電用電極パッド16と、第1通電用電極15と第1通電用電極パッド16とを接続する第1通電用配線17とによって構成されている。
【0055】
また、第2通電用導体部12は、その一部が通電部9の長手方向に沿う他方の辺縁部(図9の右側の辺縁部)と重なるように設けられた第2通電用電極18と、外部の交流電源に接続される第2通電用電極パッド19と、第2通電用電極18と第2通電用電極パッド19とを接続する第2通電用配線20とによって構成されている。非磁性基板2上において、図9に示す如く平面視した場合に第2通電用導体部12は、第1通電用導体部11に対して略点対称位置に形成されている。
【0056】
第1通電用電極パッド16および第2通電用電極パッド19に接続された交流電源から交流が供給されると、第1通電用電極パッド16からの電流は、第1通電用配線17および第1通電用電極15を介して通電部9に供給され、通電部9の幅方向を左から右に向かって流れる。また、第2通電用電極パッド19からの電流は、第2通電用配線20および第2通電用電極18を介して通電部9に供給され、通電部9の幅方向を右から左に向かって流れる。このように互いに逆向きの電流が交互に流れることにより、通電部9が、その長手方向に励磁される。
【0057】
一方、第1出力用導体部13は、ピックアップコイル6の第1コイル部7の中心側の出力端7aに電気的に接続された第1出力用電極21と、外部の検出回路に接続される第1出力用電極パッド22と、前記第1出力用電極21と第1出力用電極パッド22とを接続する第1出力用配線23によって構成されており、第1通電用導体部11に隣り合うように形成されている。
【0058】
また、第2出力用導体部14は、ピックアップコイル6の第2コイル部8の中心側の出力端8aに接続された第2出力用電極24と、外部の検出回路に接続される第2出力用電極パッド25と、前記第2出力用電極24と第2出力用電極パッド25とを接続する第2出力用配線26によって構成されており、非磁性基板2上において第1出力用導体部13に対して略点対称位置に配置されている。
第1コイル部7および第2コイル部8で生じた誘導電圧は、第1出力用電極21と第2出力用電極24との間の出力電圧として検出回路で検出される。
【0059】
絶縁層5は、磁気コア3および導体層4と、ピックアップコイル6とを絶縁するように非磁性基板2上に形成されている。
絶縁層5は、非磁性基板2、磁気コア3および導体層4の上に全面的に設けられ、各出力用電極21、24に対応する位置にスルーホールが設けられている。スルーホール内には上下導通用の導体が充填され、これにより、各出力用電極21、24と第1コイル部7および第2コイル部8の各出力端7a、8aとが電気的に接続されている。
絶縁層5を構成する材料は、感光性ポリイミドなどの絶縁性樹脂の他、SiO2やAl2O3等の金属酸化物、Si3N4やAlN等の金属窒化物などを例示することができる。
【0060】
ピックアップコイル6を構成する第1コイル部7および第2コイル部8について説明すると、それぞれ、スパイラル状のパターンで形成された導体薄膜によって構成されており、より具体的に、各コイル部7、8は、中心から外側に反時計回りに延在された配線(導体薄膜)によって構成され、ピックアップコイル6全体で略8の字状をなすように、各コイル部7、8の最外周の配線同士が連続されている。このピックアップコイル6では、各コイル部7、8の中心側の端部が該ピックアップコイル6で生じた誘導電圧を出力する出力端7a、8aを構成する。なお、各コイル部7、8は、中心から外側に時計回りに延在された配線によって構成されていても良い。
【0061】
ここで、第1コイル部7の配線は、通電部9の幅方向と略平行となるように並列した複数の順方向ライン27よりなる順方向ライン群(同相磁界発生部)27Aと、順方向ライン群27Aと離間して配され、通電部9の幅方向と略平行となるように並列した複数の逆方向ライン28よりなる逆方向ライン群(逆相磁界発生部)28Aとを有し、順方向ライン群27Aが逆方向ライン群28Aよりも第2コイル部8側となるように配されている。
また、第2コイル部8の配線も、同様に、複数の順方向ライン30よりなる順方向ライン群(同相磁界発生部)30A、複数の逆方向ライン31よりなる逆方向ライン群(逆相磁界発生部)31Aとを有し、順方向ライン群30Aが逆方向ライン群31Aよりも第1コイル部7側となるように配されている。
【0062】
そして、各コイル部7、8において、各順方向ライン27、30は通電部9を幅方向に横切るように該通電部9と重なっており、各逆方向ライン28、31は図1に示す如く平面視集磁部10、10と重なっている。
なお、本実施形態において、第1コイル部7と第2コイル部8の同相磁界発生部とは、第1コイル部7と第2コイル部8のそれぞれの中心部の間の領域、すなわち、第1コイル部7の中心部と、第2コイル部8の中心部との間の領域である。これに対して、第1コイル部7と第2コイル部8のそれぞれの中心部から、非磁性基板2の外側よりの領域、例えば図9において、第1コイル部7の中心部より上側の領域および第2コイル部8の中心部より下側の領域は、逆相磁界発生部とされる。
【0063】
前記構造の通電部9の寸法は、特に限定されるものではないが、電子方位計としての使用可能とするために、通電部9と集磁部10、10を合わせた長手方向の長さを0.5mmとすることを想定すると、一例として、通電部9の長さを250μm程度、幅を30μm程度、集磁部10の幅と長さを125μm程度とすることができる。
【0064】
次に、前記構成の磁気センサ部としての動作において上述した第1実施形態における説明に対して追加する部分について説明する。
ドライブ部M15の交流電源から供給された三角波電流は、各通電用電極15、18を介して通電部9に供給され、通電部9の幅方向に沿って流れる。これにより、通電部9が励磁され、その長手方向にB−Hカーブに沿った磁束が生じる。図2(b)に示すように、通電部9には、長手方向の磁束が向きを変えて交互に生じる。
通電部9に生じた磁束はピックアップコイル6の各順方向ライン27、30と交差し、各順方向ライン群(同相磁界発生部)27A、30Aに誘導電圧(誘導電流)を発生させる。そして、ピックアップコイル6に発生した誘導電圧は、ピックアップコイル6の各出力端7a、8aから出力電圧としてスパイク波が検出される。
【0065】
このように構成された磁気センサ部は、従来必要であった励磁コイルを用いずに、磁気コア3の通電部9に直接電流を通電することによって、通電部9を長手方向に励磁する構成のため、次のような効果を得ることができる。
(1)磁気コア3に励磁コイルを巻回すプロセスを省略でき、構造を単純にすることができる。
(2)励磁コイルを巻回すのに必要な領域を省略できるため、その分ピックアップコイル6を多く巻回すことができる。その結果、出力を大きくとることができるため、SN比を向上させることができる。
(3)磁気コア3を励磁コイルによって励磁する場合、磁気コア3の長さを短くすると、反磁界の影響が大きくなって励磁効率が低下するため、大電流による通電が必要となる。これに対して、磁気コア3に直接電流を通電することによって励磁すると、励磁の際に反磁界の影響を小さくすることができる。このため、小さい電流で動作させることができ、低消費電力化が可能となる。
(4)また、励磁の際に反磁界の影響が小さいため、センサ素子の小型化が可能であり、小型、薄型の電子方位計の構成が可能である。
【0066】
また、本実施形態の磁気センサ素子1では、ピックアップコイル6としてスパイラル状コイルを用い、磁気コア3の通電部9近傍にスパイラル状コイルの同相磁界発生部27A、30Aを配しているため、次のような効果を得ることができる。
(A)逆相磁界発生部28A、31Aにおける磁束変化の影響を取り除くことができ、SN比の向上が可能である。
(B)逆相磁界発生部28A、31Aに配した軟磁性薄膜の領域を集磁構造として用いることが可能となるため、感度の向上が可能である。
以上の理由から、感度、出力およびSN比を十分に確保しつつ、磁気センサ素子1の小型化が可能である。
【0067】
また、この磁気センサ素子1では、通電部9の励磁によって生じる磁束の方向が、平行フラックスゲートセンサと同様に通電部9の長手方向であるため、前述のように通電部9に三角波電流を通電した場合には、この三角波電流の極性が切り替わるタイミングで出力されるスパイク状電圧波形を検出し、このスパイク状電圧波形の発生する時間間隔をカウンタにて計測することにより、この時間間隔に基づいて外部磁界強度を算出することができる。このような磁界の検出方法では、外部磁界強度の算出過程でヒステリシスの影響を取り除くことができるとともに、カウンタを用いたデジタル検出が可能であるため、AD変換時の誤差の影響を取り除くことができる。このため、検出値のリニアリティが良く、外部磁界強度を精度よく検出することができる。
【0068】
なお、本実施形態の磁気センサ部において、各部の形状は前述のものに限るものではない。
【0069】
以下、本発明の磁気検出装置の第4実施形態における磁気センサ部について、図面に基づいて説明する。図13及び図14は、本実施形態に係る磁気センサ部における磁気コアの形状の一例を示す平面図である。
【0070】
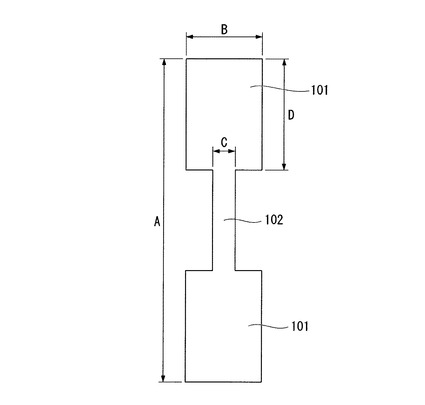
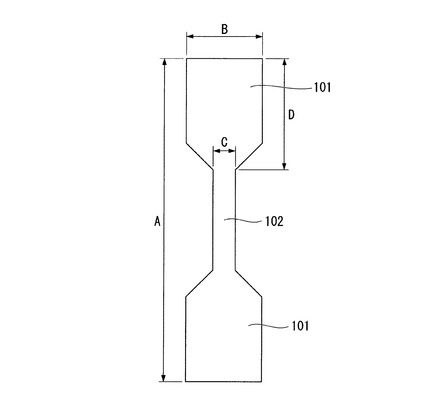
本実施形態における磁気センサ部の磁気コアは、図13及び図14に示すように、端部分101と中央部分102とを有する。端部分101の幅Bは、中央部分102の幅Cよりも広い。磁気コアの長手方向の長さAは、1mm以下、望ましくは0.5mm以下である。端部分101の幅Bと端部分101の長手方向の長さDの比B/Dの値は1よりも小さい。磁気センサ部の磁気コアの長手方向は、磁気センサ部の感磁方向と一致している。図13及び図14では図示していないが、端部分1の周囲には、励磁コイルが巻き回され、中央部分102の周囲には、ピックアップコイルが巻き回される。
図13は、磁気コアの端部分の形状が角型の場合の例を示す平面図である。図14は、磁気コアが端部分101と中央部分102との境界にテーパ形状を有する場合の例を示す平面図である。角部での磁束の局所的な飽和を抑えるためには、図14に示すように、端部分101と中央部分102の境界が略テーパ状になっていることが望ましい。この場合、端部分101の長手方向の長さDは略テーパ状の部分を含む長さを表わすこととすると、端部分101の幅Bと端部分101の長手方向の長さDの比B/Dの値が、1よりも小さいことが望ましい。
【0071】
磁性薄膜においては、膜厚方向と面内方向の比率が、数100〜数1000程度と大きい。従って、反磁界係数は膜厚方向と面内方向で数100〜数1000倍の違いがあり、面内方向の反磁界係数は非常に小さい。磁性薄膜を、長手方向を有する形状にパターニングした場合、長手方向と幅方向の寸法比によって反磁界係数が決定される。この場合、長手方向の反磁界係数は小さく、幅方向の反磁界係数は大きくなるため、形状異方性は、長手方向が容易軸となる。
【0072】
上述したように、本実施形態の磁気センサ部は、磁気コアに中央部分102よりも幅の広い端部分101を有し、端部分101の幅Bは端部分101の長手方向の長さDよりも小さい。端部分101の形状異方性による容易軸は、磁気センサ部の長手方向である。従って、感磁方向と直交する磁界によるコア内の磁束密度の変化が少なく、他軸感度特性が良好である。これにより、方位精度の優れた電子方位計を構成することが可能である。
【0073】
【数4】
【0074】
上述した式(3)より、外部磁界に対する時間間隔の変化t2−t1は、外部磁界Hextと励磁コイルの作る磁界Hexcの比Hext/Hexcおよび三角波の周期Tに依存することが分かる。外部磁界に対する感度S=d(t2−t1)/dHextは、励磁コイルに通電する電流振幅Iexc、励磁コイルに流れる単位電流当たりの発生磁界すなわち励磁効率α、及び三角波の周期Tを用いて、S=T/(2・Iexc×α)で表される。よって、励磁電流が大きいほど、センサの感度Sは小さくなる。三角波の周期Tが大きいすなわち励磁周波数fexcが小さいほど、センサの感度Sは大きくなる。
【0075】
励磁効率αは、磁気センサ部を構成する磁気コアとコイルの巻き数によって決定される値である。励磁効率αが大きいほど、少ない電流でフラックスゲートセンサを駆動することができる。また、式(3)において、Hext=Hexcとなるとき式(3)は0となり、このときのHextが測定磁界範囲の上限となる。Hexc=α×Iexcで表されることから、励磁効率αが大きいほど、同一の電流で駆動した場合に広い測定磁界範囲を有することとなる。
【0076】
次に、本発明の実施形態における電子方位計を説明する。図18は、本実施形態に係る電子方位計の概略斜視図である。
【0077】
図18に示した電子方位計は、第1フラックスゲート(X軸)センサM1x、第2フラックスゲート(Y軸)センサM1y、第3フラックスゲート(Z軸)センサM1z、および信号処理用IC(半導体集積回路)M2を、1つの基板M0上に配置することにより構成される。第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zはそれぞれ、上述の各実施形態で説明した磁気センサ部M1とされる。
【0078】
具体的には、第1フラックスゲートセンサM1xおよび第2フラックスゲートセンサM1yは、電子方位計を構成する基板面に対して、その形成された面が略平行となるように、かつ感磁方向が互いに直交するように配置される。また、第3フラックスゲートセンサM1zは、電子方位計を構成する基板面に対して略垂直となるように配置される。このとき、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zは、外部との接続端子を除いた領域、すなわち磁気コアおよび励磁部、検出コイルを形成する部分の形状が同一であることが望ましい。これは、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれの特性を揃えることにより、各センサの特性のばらつきを補正する必要がなく、電子回路を簡略化できるようにするためである。また、第3フラックスゲートセンサM1zは、基板面に対して略垂直に実装されるので、電子方位計の厚さを薄くするためには、その感磁方向の長さが、1mm以下、さらに好ましくは0.5mm程度であることが望ましい。
【0079】
また、信号処理用ICM2は、誘導電圧が発生するタイミングを計数するためのカウンタM21、停止信号を出力するカウンタ制御回路M22と信号処理回路M23とを有する上述の半導体集積回路M2に加え、各フラックスゲートセンサにおける励磁部に一定周波数の三角波電流を通電するドライブ部M15としての回路と、検出コイルM13に現れる誘導電圧を検出するための検出部M14としての回路と、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれに対して上記の回路との接続を切り替えるためのセレクタとを備えている。かかる構成により、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zで3軸方向それぞれの磁界を順次計測し、演算を行うことで方位誤差の小さい電子方位計を実現することができる。
【0080】
また、本発明の電子方位計においては、第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれに、少なくとも停止信号を出力するカウンタ制御回路M22を含む回路を設ける構成とすることもできる。
この場合、線形性を保った出力を第1フラックスゲートセンサM1x、第2フラックスゲートセンサM1yおよび第3フラックスゲートセンサM1zのそれぞれで行うことが可能となる。
【0081】
上記の各実施形態において、連続する複数の同一形状の三角波による検出を行ったが、図19に示すように、単一の三角波による検出も可能である。この場合、検出時間の開始となる時刻t1においては、三角波の頂点における励磁磁界の大きさがその前から同じになるようにしておき、三角波形状の励磁を行った後、検出時間の終了となる時刻t5から後も、三角波の頂点における励磁磁界と同じ大きさを維持することが好ましい。この場合でも三角波の周期Tに対して、停止信号の出力される停止時間は上述したように設定されることになる。
【0082】
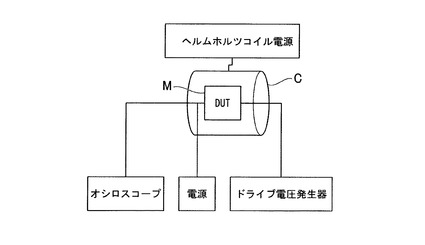
<実施例>
図20または図21に示すように、ヘルムホルツコイルC内に、図15に示す第3実施形態と同様の磁気検出装置Mを載置して、−2〜+2mTで変動する外部磁界を印加して、スパイク状電圧波形のピーク間隔を直接出力するとともに、これを、外部磁界の強度信号となるデジタル出力として出力させた。
【0083】
磁気センサ部における磁気コアの形状は、磁気コアの長手方向の長さA=480μm、端部分1の幅B=80μm、中央部分102の幅C=20μm、端部分101の長手方向の長さD=140μm、励磁コイルの巻き数は16.5、ピックアップコイルの巻き数は6.5とした。
三角波電流は、振幅100mA、周波数30kHzとし、正負のパルス状ピックアップ電圧がそれぞれの基準電圧Vthを超える時間間隔tの外部磁界依存性、すなわち外部磁界に対する磁気検出装置Mの出力を示すグラフを図6(a)に示す。
【0084】
この外部磁界のピーク付近で出力しない停止信号をクロック制御回路から出力した場合の磁気検出装置Mのピーク間隔(μm)を図6(b)に示す。またこれらに対応するデジタル出力を図7に示す。
【0085】
これらの結果により、停止信号によりデジタル出力を三角波形磁界の頂点以外を除いた出力範囲の−.9mT〜+1.9mTの範囲とする。そしてこの範囲の出力を、図8に示すように、たとえば14bitとされるデジタル出力(LSB)に換算する。これにより、デジタル出力の上限は、16384程度となる。これにより、線形性を保った状態でデジタル出力のフルスケールを使用することが可能となることがわかる。
【符号の説明】
【0086】
M…磁気検出装置、M1…磁気センサ部、M2…半導体集積回路、M11…励磁部、M12…磁気コア、M13…検出コイル、M14…検出部、M15…ドライブ部、M21…クロック生成回路、M22…クロック制御回路、M23…信号処理回路
【特許請求の範囲】
【請求項1】
励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサに用いられる半導体集積回路であって、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期Tの1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することを特徴とする半導体集積回路。
【請求項2】
前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項1記載の半導体集積回路。
【請求項3】
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサ部と
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有する半導体集積回路と、
を具備してなることを特徴とする磁気検出装置。
【請求項4】
前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項3記載の磁気検出装置。
【請求項5】
基板と、
前記基板上に配置され、3軸のそれぞれに沿うように配置された第1、第2および第3のフラックスゲート型の磁気センサ部と、
半導体集積回路と、
を含み、
前記第1、第2および第3の磁気センサ部の各々は、
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するものとされ、
前記半導体集積回路は、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することを特徴とする、電子方位計。
【請求項6】
前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項5記載の電子方位計。
【請求項1】
励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサに用いられる半導体集積回路であって、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期Tの1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することを特徴とする半導体集積回路。
【請求項2】
前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項1記載の半導体集積回路。
【請求項3】
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するフラックスゲート型の磁気センサ部と
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有する半導体集積回路と、
を具備してなることを特徴とする磁気検出装置。
【請求項4】
前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項3記載の磁気検出装置。
【請求項5】
基板と、
前記基板上に配置され、3軸のそれぞれに沿うように配置された第1、第2および第3のフラックスゲート型の磁気センサ部と、
半導体集積回路と、
を含み、
前記第1、第2および第3の磁気センサ部の各々は、
磁性体コアと、
前記磁性体コア内の磁束の変化を検出する検出コイルと、
供給される周期的な励磁電流に伴って前記磁性体コア内の磁束を変化させる励磁手段と、
前記励磁手段による前記磁性体コア内の磁束の変化に伴って前記検出コイルに発生する誘導出力を検出する検出手段と、
を有し、励磁電流として三角波電流を磁性体コアに対する励磁手段に通電し、磁性体コアに対して設けられた検出コイルから出力される正符号および負符号の各スパイク状電圧波形をそれぞれ検出し、一のスパイク状電圧波形と次に検出される逆符号のスパイク状電圧波形との時間間隔を計測し、この時間間隔に基づいて外部磁界の強度を検出するものとされ、
前記半導体集積回路は、
クロック生成回路と、
このクロック生成回路から出力されるクロック信号に基づき、
前記検出手段で検出された符号の異なる前記誘導出力の時間間隔に基づいた外部磁界強度の強度信号を出力する信号処理回路と、
少なくとも前記三角波の頂点より前に該三角波周期の1〜5%とされる前方停止時間、および、前記三角波の頂点から後に前記三角波周期の1〜5%とされる後方停止時間において、前記信号処理回路からの強度信号出力を停止するように制御するクロック制御回路と、
を有することを特徴とする、電子方位計。
【請求項6】
前記半導体集積回路において、前記停止時間を除く時間における外部磁界強度信号をダイナミックレンジとして出力することを特徴とする請求項5記載の電子方位計。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−78087(P2012−78087A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−220429(P2010−220429)
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000005186)株式会社フジクラ (4,463)
【Fターム(参考)】
[ Back to top ]