
単一の撮像経路を使用して三次元画像情報を生成するための方法および装置
単一の撮像経路を使用して三次元画像情報を生成するための方法と装置を開示する。当該方法は、当該方法は、前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するステップを有し、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該方法は、また、前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるステップを有し、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該方法は、さらに、前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するステップを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概しては、三次元画像情報の生成に関し、特に、単一の撮像経路を用いる三次元画像情報の生成に関する。
【背景技術】
【0002】
撮像(imaging)は、一般に、光景(scene)内の物体(object)によって放射または反射された放射線を適切な画像センサーによって受信することによって、該光景の表示像(representation)を生成することを有する。撮像され得る放射線のいくつかの例として、可視光、赤外光または熱、高周波、音波、ならびに超音波を挙げることができる。
【0003】
三次元(3D)の光景は、奥行き情報を含んでいるが、奥行き情報は、多くの撮像システムにおいて二次元(2D)の画像平面へと写像され、したがって保存されることがない。従来のカメラが、奥行き情報が保存されず、結果として光景の2D画像表現がもたらされる光学的な撮像システムの例である。立体視光学系(stereoscopic optical systems)が、異なる透視点からの別々の画像を生成することによって奥行き情報を表わす画像を生成することができる。奥行き情報を、例えば光景内の地点間の3D測定を生成するために使用することができる。あるいは、ユーザが少なくとも画像において或る程度の奥行きが表現された画像ビューを知覚できるよう、別々の画像をユーザの左および右のそれぞれの眼へと提示することができる。このように、立体視システムは、実際の光景を眺める人間の眼の働きを模擬する空間的に別々の透視点を有する画像を生成する。画像を、或る種の能動的な眼鏡類を使用して眺めることができ、あるいはユーザの左および右のそれぞれの眼に向かって空間的に別々の画像を投影するように表示装置を動作させることによって眺めることができる。
【0004】
立体視撮像(stereoscopic imaging)の使用は、外科手術における応用が見出されており、そこでは、外科医に3Dの視界を提供するために3D内視鏡が使用され得る。立体視撮像は、海底探索といった遠隔作業においても有用となり得、そこではロボットアクチュエータから離れた場所に位置する作業者へと3D画像情報を提供することによって、該アクチュエータの制御の助けになる。立体視撮像の他の用途を、身体計測システムおよび娯楽産業においても見出すことができる。
【発明の概要】
【0005】
本発明の1つの態様によれば、関連する視野(associated field of view)を持った単一の撮像経路を用いて三次元画像情報を生成する方法が提供される。当該方法は、前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するステップを有し、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該方法は、また、前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるステップを有し、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該方法は、さらに、前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するステップを有する。
【0006】
前記第1および第2の画像を選択的に受信するステップは、画像センサーにおいて前記第1および第2の画像を受信するステップを含んでいてもよく、かつ、前記透過の変化を補償するステップは、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーと関係する露出を増加させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーと関係する利得を減少させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させるステップ、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させるステップ
のうちの1つを含んでいてもよい。
【0007】
前記第1および第2の画像を選択的に受信するステップは、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮るステップと、
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮るステップとを、
交互に含んでいてもよい。
【0008】
前記撮像経路の前記第1および第2の部位を交互に遮るステップは、
前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるステップを含んでいてもよい。
【0009】
前記遮断素子を移動させるステップは、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するステップ、
前記遮断素子の位置を表わす位置信号を受信するステップ、および
前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するステップ
を含んでいてもよい。
【0010】
前記撮像経路の前記第1および第2の部位を交互に遮るステップは、前記撮像経路の前記第1および第2の部位を選択的に遮るために、前記撮像経路の開口面の付近に位置する光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0011】
前記光学素子は、複数の素子を含んでいてもよく、かつ、前記第1および第2の領域を選択的に作動させるステップは、前記複数の素子のうちの第1の複数の素子、および
前記複数の素子のうちの第2の複数の素子のうちの一方を選択的に作動させるステップを含んでいてもよい。
【0012】
前記複数の素子の各々の素子は、駆動信号の受信に応答して作動させられるように動作することができものであってよく、
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップは、前記第1および第2の複数の素子の素子数を選択的に変化させて前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように駆動信号を生成するステップを含んでいてもよい。
【0013】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップは、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0014】
前記透過性の光学素子の第1および第2の領域を選択的に作動させるステップは、液晶素子および光バルブのうちの一方の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0015】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップは、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通る光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0016】
前記反射性の光学素子の第1および第2の領域を選択的に作動させるステップは、複数の可動ミラー素子を有する光バルブの第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0017】
前記第1および第2の画像を選択的に受信するステップは、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信するステップ、および
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成するステップ
を含んでいてもよい。
【0018】
前記第1の画像の受信は、第1の偏光状態を有する第1の画像の受信を含んでいてもよく、前記第2の画像の受信は、第2の偏光状態を有する第2の画像の受信を含んでいてもよく、
前記第1および第2の画像の分離が、第1の偏光状態の放射線に応答する第1の複数の素子と、第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイにおいて、前記第1および第2の画像を受信することを含んでいてもよい。
【0019】
当該方法は、前記第1の偏光状態を有する前記第1の画像を生成すること、および、前記第2の偏光状態を有する前記第2の画像を生成することをさらに含んでいてもよい。
【0020】
前記範囲を変化させるステップは、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップを含んでいてもよい。
【0021】
前記制御信号を生成するステップをさらに含んでいてもよい。
【0022】
前記第1の透視点の位置は、第1の図心の位置によって定められてもよく、前記第2の透視点の位置は、第2の図心の位置によって定められてもよく、
前記制御信号を生成するステップは、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成するステップを含んでいてもよい。
【0023】
前記第1の透視点の位置は、第1の図心の位置によって定められてもよく、前記第2の透視点の位置は、第2の図心の位置によって定められてもよく、
前記範囲を変化させるステップは、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるステップを含んでいてもよい。
【0024】
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップは、前記範囲を、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
のうちの一方をもたらすように変化させるステップを含んでいてもよい。
【0025】
前記第1および第2の画像を受信するステップは、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信するステップを含んでいてもよい。
【0026】
本発明の他の態様によれば、関連する視野を持った単一の撮像経路を使用して三次元画像情報を生成するための装置が提供される。当該装置は、前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するための手段を有し、該手段は、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該装置は、また、前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるための手段を有し、該手段は、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該装置は、さらに、前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するための手段を有するものである。
【0027】
本発明の他の態様によれば、三次元画像情報を生成するための装置が提供される。当該装置は、関連する視野を持った単一の撮像経路を有する。当該装置は、また、第1および第2の画像を前記単一の撮像経路の第1および第2のそれぞれの部位を通して選択的に受信させるよう作動可能に構成された画像モジュレータを有し、該画像モジュレータは、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有している。前記第1および第2の画像は協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該装置は、前記モジュレータと通信するコントローラを有し、該コントローラは、前記第1および第2の画像を受信しつつ前記モジュレータによって前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させる信号を生成するよう作動可能に構成され、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該装置は、前記第1および第2の部位の前記範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するよう作動可能に構成された補償部をさらに有する。
【0028】
前記単一の撮像経路は、画像センサーに前記第1および第2の画像を生成するよう作動可能に構成されていてもよく、
前記補償部は、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーに関係する露出を増加させること、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーに関係する露出を減少させること、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させること、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させること
のうちの1つによって前記透過の前記変化を補償するよう作動可能に構成されていてもよい。
【0029】
前記モジュレータは、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮ること、および
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮ること
を交互に実行するよう作動可能に構成されていてもよい。
【0030】
前記モジュレータは、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるよう作動可能に構成されていてもよい。
【0031】
前記モジュレータは、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するためのアクチュエータを有していてもよく、
前記遮断素子の位置を表わす位置信号を生成するよう作動可能に構成された位置センサーを有していてもよく、かつ、
前記コントローラは、前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するよう作動可能に構成されていてもよい。
【0032】
前記モジュレータは、第1および第2の領域を有する光学素子を備えていてもよく、該第1および第2の領域は、前記撮像経路の前記第1および第2の部位を選択的に遮るべく選択的に作動させられるよう作動可能に構成されていてもよい。
【0033】
前記光学素子は、複数の素子を含んでいてもよく、
前記第1の領域は、第1の複数の素子を含んでいてもよく、前記第2の領域は、第2の複数の素子を含んでいてもよく、前記第1および第2の複数が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるべく選択されてもよい。
【0034】
前記複数の素子の各々の素子は、駆動信号の受信に応答して作動させられるように動作することができるものであってよく、
当該装置は、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるために、前記第1および第2の複数の素子の素子数を選択的に変化させるべく前記駆動信号を生成するよう作動可能に構成されたモジュレータ駆動部をさらに備えていてもよい。
【0035】
前記モジュレータは、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されていてもよい。
【0036】
前記モジュレータは、液晶素子および光バルブのうちの一方を備えていてもよい。
【0037】
前記モジュレータは、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通って受信される光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されていてもよい。
【0038】
前記モジュレータは、複数の可動ミラー素子を有する光バルブを備えていてもよい。
【0039】
前記モジュレータは、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信すること、および、
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成すること、
を行うよう作動可能に構成されていてもよい。
【0040】
前記モジュレータは、第1の偏光状態を有する第1の画像と第2の偏光状態を有する前記第2の画像とを生成するよう作動可能に構成された第1および第2の偏光領域を有する偏光板を備えていてもよく、
当該装置は、前記第1の偏光状態の放射線に応答する第1の複数の素子と前記第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイをさらに備えていてもよく、該センサーアレイは、前記第1および第2の画像を分離すべく動作することができるようになっていてもよい。
【0041】
前記モジュレータは、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるよう作動可能に構成されていてもよい。
【0042】
前記コントローラは、前記制御信号を生成すべく動作可能に構成されていてもよい。
【0043】
前記第1の透視点の位置は、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記コントローラが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成することによって、前記制御信号を生成するよう作動可能に構成されていてもよい。
【0044】
前記第1の透視点の位置は、第1の図心の位置によって定められ、前記第2の透視点の位置は、第2の図心の位置によって定められ、
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるよう作動可能に構成されていてもよい。
【0045】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように動作可能に構成されていてもよく、それは、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
の一方をもたらすように前記範囲を変化させることによってなされるものであってよい。
【0046】
前記撮像経路は、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信することによって前記第1および第2の画像を受信するよう作動可能に構成されていてもよい。
【0047】
本発明の他の態様と特徴は、添付の図面と関連させた本発明の具体的な実施形態についての以下の説明を検討することによって、当業者に明らかになるであろう。
図面には、本発明の実施形態が示されている。
【図面の簡単な説明】
【0048】
【図1】図1は、三次元画像情報を生成するための本発明の第1の実施形態による装置の上面概略図である。
【図2】図2は、図1に示した装置の撮像経路の正面概略図である。
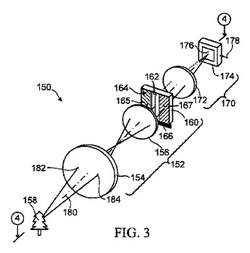
【図3】図3は、三次元画像情報を生成するための本発明の別の実施形態による光学撮像装置の斜視図である。
【図4】図4は、図3に示した光学撮像装置の線4−4に沿って得た断面図である。
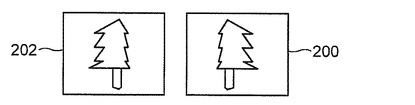
【図5】図5は、図3に示した光学撮像装置によって生成された第1および第2の画像を示している。
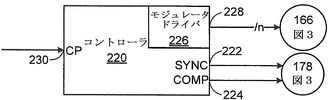
【図6】図6は、図3に示した光学撮像装置の動作を制御するためのコントローラのブロック図である。
【図7】図7は、図6に示したコントローラによって実行される制御プロセスを説明するプロセスフロー図である。
【図8】図8A〜図8Dは、図3に示した光学撮像装置によって生成される一連の第1および第2の画像を示している。
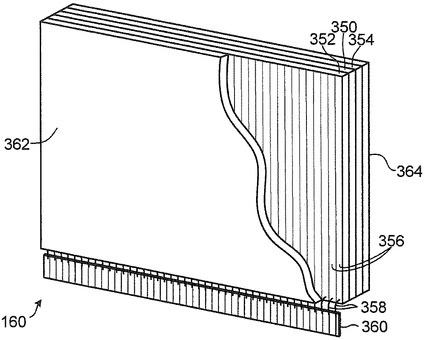
【図9】図9は、図3に示した光学撮像装置において使用される液晶モジュレータの斜視図である。
【図10】図10は、本発明の別の実施形態による空間モジュレータの概略図である。
【図11】図11は、図10に示した空間モジュレータを制御するための制御信号のグラフ表示である。
【図12】図12は、図10に示した空間モジュレータにおいて使用されるアクチュエータの別の実施形態の斜視図である。
【図13】図13は、三次元画像情報を生成するための光学撮像装置の別の実施形態の斜視図である。
【発明を実施するための形態】
【0049】
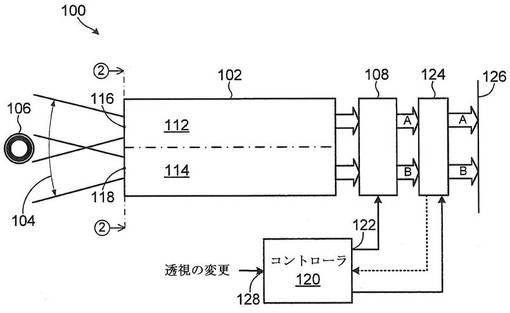
図1を参照すると、三次元画像情報を生成するための本発明の第1の実施形態による装置が、概略の上面図にて、全体として100で示されている。当該装置100は、視野104(field of view)を有する単一の撮像経路(imaging path)102を備えており、この実施形態においては、視野104が物体106を含んでいる。さらに装置100は、単一の撮像経路102の第1および第2のそれぞれの部位112および114を介して選択的に受信される第1および第2の画像(図1において、「A」および「B」として概念的に示されている)を生成するように作動可能に構成された画像モジュレータ108を備えている。
【0050】
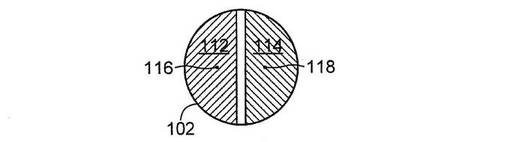
図2を参照すると、この実施形態においては、撮像経路が円形であり、第1および第2の部位112および114の各々が、概して円の一部分を含んでいる。第1の部位112は、視野104内に第1の図心(centroid)116によって表わされる第1の透視点(perspective viewpoint)を定めている。第2の部位114は、視野104内に第2の図心118によって表わされる第2の透視点を定めている。他の実施形態においては、撮像経路は円形でなくてもよい。
【0051】
さらに、当該装置100は、モジュレータ108と通信するコントローラ120を備えている。該コントローラ120は、制御信号を生成するための出力部122を備えており、該制御信号は、第1および第2の透視点116および118の位置を変化させるように機能することができ、それによって、第1および第2の画像を受信しつつ、モジュレータ108によって撮像経路の第1および第2の部位112および114の広がりを変化させてるものである。透視点116および118の位置の変化は、視野104内の物体106の三次元空間属性の表現に、それに対応する変化をもたらす。
【0052】
さらに、当該装置100は、補償部124を備えている。補償部124は、第1および第2の部位の広がりを変化させるときに第1および第2の画像AおよびBの各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、撮像経路102の第1および第2の部位112および114の透過の変化を補償するように作用可能に構成されている。
【0053】
第1および第2の画像AおよびBは、画像平面126に形成され、第1および第2の画像が協働して、物体106および視野104内の他の物体の三次元空間属性(three dimensional attributes)を表わすように機能することができる。この実施形態においては、さらにコントローラ120が、透視(perspective)の所望の変更についてのユーザの入力を受信するための入力部128を備えており、コントローラが、ユーザの入力に応答して出力部122に制御信号を生成するように作動可能に構成されている。
【0054】
一実施形態においては、撮像経路102は、画像を生成するために光放射を受信すべく動作することができる光学撮像経路であってよい。光放射は、赤外、可視、および紫外の波長範囲にある波長範囲を有することができる。他の実施形態においては、撮像経路102は、音響、超音波、または高周波信号の受信に応答して画像を生成するよう作動可能であってよい。画像平面126における画像を、種々の記録方法および/または媒体のいずれかを使用する任意の適切な撮像装置によって取得することができる。例えば、撮像装置は、画像の記録のために感光フィルムまたは電荷結合素子(CCD)アレイを有しているスチルカメラまたはムービーカメラであってよい。あるいは、例えば音響または超音波による撮像に、圧電性結晶のアレイを使用することができ、高周波による撮像に、アンテナまたはアンテナアレイを使用することができる。
【0055】
好都合には、単一の撮像経路102が、撮像経路の組み立てに通常必要とされる位置合わせ(alignments)以外の特別な位置合わせを必要とせずに、3D情報を知覚および/または抽出することができるAおよびB画像を生成する。対照的に、別々の撮像経路または2つの離間した撮像経路へと光学的に分割される撮像経路を使用する場合、位置合わせにかなりの困難が存在し、小さな位置合わせのずれが存在するだけで、ユーザにとって眼の疲れまたは他の不快な影響が生じる可能性がある。
【0056】
光学的撮像の実施形態
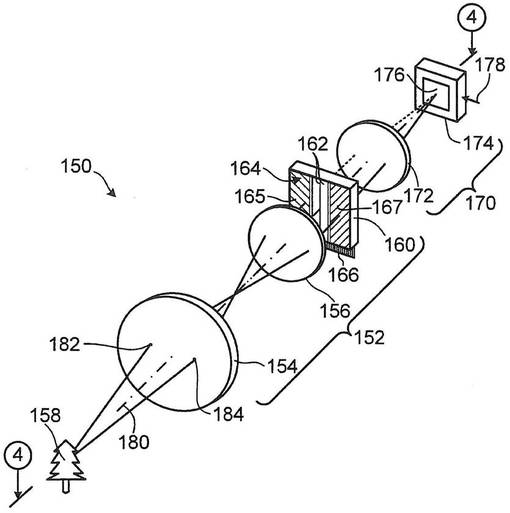
図3を参照すると、三次元画像情報を生成するための光学撮像装置の実施形態が、全体として150で示されている。光学撮像装置150は、第1のレンズ154と第2のレンズ156とを有する単一の撮像経路152を備えており、第1のレンズ154および第2のレンズ156が、これら第1および第2のレンズの視野内の物体158からの光線を受信するように配置されている。
【0057】
光学撮像装置150は、複数の素子162を有する液晶装置(LCD)モジュレータ160をさらに備えている。各々の素子162が、第1の画像を受信している撮像経路152の第1の部分165と第2の画像を受信している撮像経路の第2の部分167とを交互に遮るように選択的に制御することができるモジュレータ160の前面領域164の柱状部分を定めている。モジュレータ160は、複数の制御入力166をさらに備えており、各々の素子162に、素子を選択的に動作させるための操作信号を受信するための制御入力が組み合わせられている。
【0058】
光学撮像装置150は、第3のレンズ172とCCD画像センサー174とを有するカメラ170をさらに備えており、CCD画像センサー174が、カメラ170の画像平面に位置している。カメラは、スチルカメラまたはビデオカメラであってよく、可視または不可視の光に対して感度を有することができる。第3のレンズ172が、モジュレータ160を透過した光を集め、画像センサー174上に画像を形成する。画像センサー174は、感光領域176と、1つ以上の制御入力178とを備えており、該制御入力は、画像の取得(キャプチャ)に関するセンサーの動作を制御するように動作することができる種々の制御信号を受信するためのものである。全般的には、画像センサー174は、感光素子の空間アレイを有しており、各素子が、素子への入射光に比例した電荷を蓄積する。蓄積した電荷を、隣に接続された素子を通って電荷を電荷増幅器へと順次移すことによって画像センサー174から読み出すことができ、電荷増幅器が、電荷を該当の素子に入射した光を表わす電圧信号に変換する。他の実施形態においては、画像センサー174は、相補型−金属酸化物−半導体(CMOS)アクティブ画素センサーまたは他の電子画像センサーであってよい。あるいは、画像センサー174は、例えば35mmフィルムなどの感光フィルム乳剤であってよい。
【0059】
画像センサー174、第3のレンズ172、液晶モジュレータ160、第1のレンズ154、第2のレンズ156、およびカメラ170は、すべて光軸180に沿って位置合わせされている。
【0060】
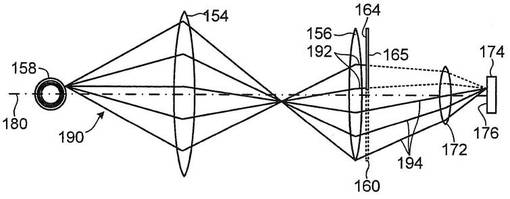
当該装置150が、図4に断面にて示されており、撮像経路152が、物体158上の軸外の点から生じる束または円錐状の放射線(rays)190によって照らされている。一般に、図3および図4に示したような光学系においては、いずれか1つの光学素子の直径が、束190のうちのどの放射線が光学系を通過できるかを制限し、この直径が、系の開口を定める。開口と物体158との間に位置する光学面による系の開口の画像が、系のための入射瞳(entrance pupil)の位置と広がりとを定める。次いで、該入射瞳が、撮像経路を通過することができる放射線の束を定める。この場合、第1のレンズ154が、系の開口(system aperture、系のアパーチャ)であり、したがって入射瞳でもあると仮定され、第1のレンズに衝突する放射線が、撮像経路152を通って伝えられる。他の実施形態においては、入射瞳が、レンズの構成に応じて、第1のレンズ154の前または後ろに位置してもよい。
【0061】
このようにして、第1のレンズ154に進入する束190の放射線は、第2のレンズ156によって集光され、モジュレータ160の前面領域164に衝突する。部分的遮蔽(モジュレータ160の第1の部位165の作動など)が、撮像経路152の系の開口の後ろに位置する場合、画像の口径食(vignetting)が生じる。この場合、放射線の束190のうちの放射線192が、モジュレータ160の前面領域164の第1の部位165によって遮られ、センサー174の感光領域176に達しない。放射線の束190のうちの放射線194は、モジュレータ160を通過し、レンズ172によって感光領域176へと集光される。口径食により、センサー174の感光領域176に形成される画像の全体的な照明が減少する。しかしながら、放射線194が、センサー174の感光領域176に交わるため、真の画像がセンサーに形成される。さらに、モジュレータによって引き起こされる口径食は、入射瞳における視界の角度を変化させない。
【0062】
物体158上の他の点も、同様に撮像され、センサー174の感光領域176に物体158の第1の画像が生み出される。図4に示した口径食の状態のもとで光学撮像装置150によって生成される第1の画像が、図5において、全体として200で示されている。画像200が、図心182(図1に示されている)によって表わされる右の透視点に対応する。同様に、第1の部位165が光を通す一方で、モジュレータ160の反対側の複数の素子162を光を遮るように制御すべく、モジュレータ160へと制御信号を供給することで、第2の画像202(図5に示されている)が、装置150によって生成される。第2の画像202が、図心184(図1に示されている)によって表わされる左の透視点に対応する。
【0063】
第1および第2の画像200および202が協働し、視野内の物体の三次元空間属性を表わす情報を含んでいる。例えば、画像200および画像202を別々に(右眼を使用して画像200を、左眼を使用して画像202を)眺めるユーザが、ユーザが物体を直接眺める場合に知覚されると考えられるものと同様の奥行きの効果を知覚することができる。一実施形態においては、画像を、例えば立体視眼鏡を使用することによってユーザの左および右のそれぞれの眼へと別々に案内することができる。
【0064】
コントローラ
光学撮像装置150(図3に示されている)の動作を制御するためのコントローラが、図6において220で示されている。コントローラ220は、典型的にはパルス列を備えている同期信号(SYNC)を生成するための出力部222を備えている。出力部222は、画像センサー174における画像の取得を同期させるために、画像センサーの入力部178に連絡している。さらにコントローラ220は、画像強度の補償を制御するための補償信号(COMP)を生成するための出力部224を備えている。図示の実施形態においては、出力部224が、画像センサーの入力部178に連絡し、画像センサーが、図1に示した補償部124として機能する。他の実施形態においては、出力部224に生成されるCOMP信号を、撮像経路が受け取る放射線の束を減少または増加させるために、光学系の調節式の虹彩などの開口絞り補償部を制御するために使用することができる。電子制御の自動虹彩ダイアフラムが、正しい画像の露出を保証するために開口サイズおよび露出を自動的に選択するカメラにおいて一般的に使用されている。
【0065】
コントローラ220は、モジュレータ160の制御入力部166を駆動するための出力部228を有しているモジュレータ駆動部226をさらに備えている。図示の実施形態においては、出力部228が、モジュレータ160の素子162の数に一致する「n」個の出力チャネルを有している。さらにコントローラ220は、視点変更(CP)のユーザ入力を受信するための入力部230を備えている。例えば、CPの入力230は、入力部に変化する電位をもたらすように構成された、バイアスが加えられた単極双投スイッチ(single-pole-double-throw switch)から得ることができる。
【0066】
一実施形態においては、コントローラ220を、例えばマイクロコントローラなどのプロセッサ回路を使用して実現することができる。
【0067】
コントローラの動作
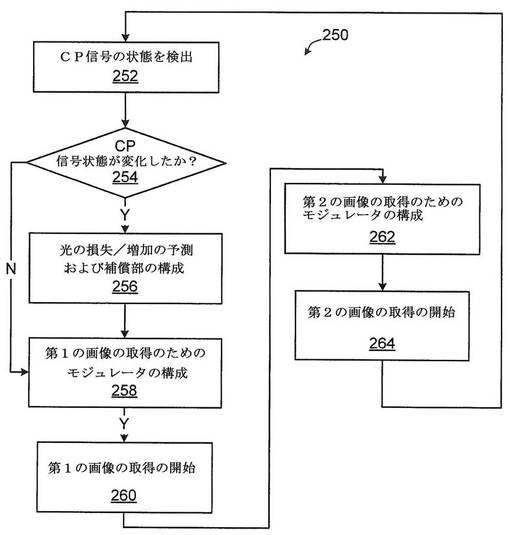
光学撮像装置150の動作の制御におけるコントローラ220の動作を、図3、図6、および図7を参照してさらに説明する。図7を参照すると、コントローラ220によって実行される制御プロセスの一実施形態が、全体として250で示されている。
【0068】
252に示されているように、このプロセスは、コントローラ220が入力部230のCP信号に関係する信号状態を検出することで始まる。254に示されるように、CP信号の状態が変化しており、すなわちユーザが画像の視点の変更を望んでいることを示している場合、プロセスは256に続く。
【0069】
その場合、256に示されるように、補償部が、CP信号に応答して光の損失または増加の予測を生成する。コントローラ220がマイクロコントローラを使用して実現される実施形態においては、光の損失または増加の予測を、入力部230において検出されたCP信号の状態の変化について計算することができる。あるいは、光の損失または増加の予測が、あらかじめ計算されて参照表としてプロセッサ回路のメモリに保存されていてもよい。次いで、光の損失または増加の予測が、個々の画像センサー174を駆動するために適したフォーマットの補償信号(COMP)をコントローラの出力部224に生成するために使用される。例えば、画像センサー174がフルフレームCCDアーキテクチャを備える実施形態においては、CCDアレイによって取得される光の量を、焦点面の近傍の機械式のシャッター(図示せず)によって制御することができ、その場合には、COMP信号が、所望の画像強度を生成するための適切なシャッター速度で機械式のシャッターを作動させるように構成されると考えられる。あるいは、フレーム転送またはインターライン転送CCDデバイスにおいては、COMP信号が、CCD素子が連続する画像の取得の間の時間の一部においてのみ光を受け取るように設定されるよう、画像の取得の光蓄積段階をゲーティングするためのゲート信号であってよい。いくつかのCCDセンサーも、アナログの電荷増幅および/または電荷信号のアナログ−デジタル変換に関係する利得の調節を可能にしており、この利得を、第1および第2の画像の強度を補償するためにCOMP信号によって制御することもできる。次いで、プロセスは、258に続く。
【0070】
254において、CP信号の状態が変化していない場合、補償すべき光の損失/増加は存在せず、プロセスは、直接258に続く。
【0071】
258に示されるように、モジュレータ160が、CP信号の状態に従って第1の画像の取得に合わせて設定され、そのような設定は、モジュレータ160の第1の複数の素子162を光を遮るように制御すべく第1の複数のn個のチャネル228を駆動するようにモジュレータを設定することを含む。260において、第1の画像の取得が、コントローラが出力部222にSYNCパルスを生成するときに開始される。取得された第1の画像を、例えば磁気テープ、メモリ、ハードドライブ、または感光乳剤などの画像記憶媒体(図示せず)にアナログまたはデジタルフォーマットで記録することができる。
【0072】
次いで、262に示されるように、モジュレータ160が、モジュレータ160の第2の複数の素子162を光を遮るように制御すべく出力部228の第2の複数のn個のチャネル228を駆動するようにモジュレータを設定することによって、第2の画像の取得に合わせて設定される。264において、第2の画像の取得が、コントローラが出力部222に第2のSYNCパルスを生成するときに開始される。
【0073】
静止画の取得においては、第1および第2の透視点182および184の各々から単一の画像だけが必要であり、この場合には、SYNC信号が、第1および第2の時間に関して隔てられた同期パルスを生成すると考えられる。パルス間の時間間隔は、画像センサー174に画像を生成するために充分な光子を蓄積するために充分な時間が与えられるように選択される。順次的なビデオ画像の形態で景色の変化を取得するためには、選択される映像フォーマットによってフレームレートが決まる可能性があり(例えば、NTSCビデオにおいては毎秒29.97フレーム)、その場合には、SYNCH信号が、ノンインターレースの画像の取得については約33.3ミリ秒の時間間隔の複数のパルスを含むことができる。特定のカメラの画像取得レートが充分に高速である場合、ユーザの各々の眼が完全なNTSCのフレームレートでそれぞれの画像を受け取るよう、第1および第2の画像を16.7ミリ秒の時間間隔で取得することができる。連続するビデオフレームを取得する場合、プロセスは、ブロック264の後でブロック252に続き、プロセス250が繰り返される。
【0074】
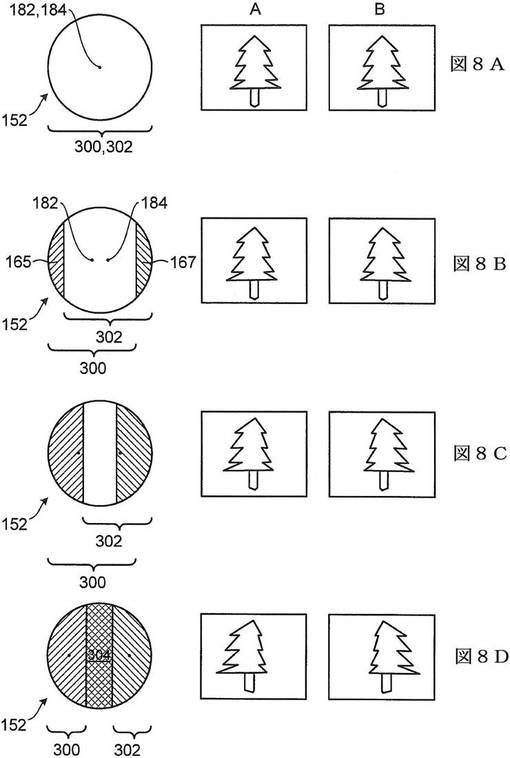
視点の変化を示す撮像経路152の一連の図が、図8に示されている。図8Aを参照すると、撮像経路152が端面図にて示されており、図心182および184が、撮像経路の中心軸に位置している。これらの状況下で、モジュレータ160の第1および第2の部位のどちらも、光を遮るようには制御されておらず、第1の画像(A)および第2の画像(B)は同一である。左および右のそれぞれの眼を使用してそれぞれのAおよびB画像を眺めるユーザは、標準的な二次元(2D)画像だけを知覚し、三次元(3D)の奥行きの知覚は不可能である。
【0075】
図8Bを参照すると、今や図心182および184が外側へと移動しており、これらの状況のもとで、モジュレータ160の第1および第2の部位165および167が、透過が撮像経路152の部位300および302を交互に通って生じるよう、光を遮るように交互に制御される。得られるAおよびB画像は、わずかに異なる透視点を有しており、それぞれのAおよびB画像を眺めるユーザが、各々の眼へと提示される画像の異なる視点ゆえに、少なくとも或る程度の3Dの奥行きを知覚することができる。
【0076】
図8Cを参照すると、図心182および184が、透過が撮像経路152の部位300および302を交互に通って生じるように、さらに外側へと再び移動している。得られるAおよびB画像は、図8Bよりもさらに大きく異なる透視点を有しており、それぞれのAおよびB画像を眺めるユーザが、さらに大きな程度の3Dの奥行きを知覚することができる。
【0077】
図8Dを参照すると、図心182および184が、撮像経路152の領域304がモジュレータ160の第1の部位165およびモジュレータの第2の部位167のどちらによっても遮られるような程度にまで離間している。透過が、撮像経路152の部位300および302を交互に通って生じる。得られるAおよびB画像は、図8Cよりもさらに大きく異なる透視点を有しており、さらに大きな程度の3Dの奥行きの知覚をもたらす。
【0078】
明らかに、図8Aおよび図8Dの間で、モジュレータ160を透過する光の量が、順に減少している。しかしながら、光の減少に、COMP信号に応答しての対応する露出の増加が付随することで、概して一定な画像強度レベルの知覚が生み出される。好都合には、装置150が、得られる画像における2Dから3D画像表現への知覚の滑らかな変化を促進する。取得されたAおよびB画像を、ユーザの左眼および右眼へと異なるAおよびB画像を提示するために特別な眼鏡類またはヘッドギアを使用する特別に構成された3D表示システムを使用して眺めることができる。あるいは、画像を、特別な眼鏡またはヘッドギアを使用せずに眺めることができる3D画像情報を表示することができる自動立体表示装置を使用して表示してもよい。
【0079】
一般に、モジュレータ160が矩形の断面を有する場合、図心182および184の位置の変化の速度は、第1および第2の部位165および167の面積の変化の速度につれて線形に変化するわけではない。したがって、図8A〜図8Dに示した画像間の滑らかな移行をもたらすために、コントローラを、三次元空間属性の表現の滑らかな変化をもたらすために、第1および第2の図心182および184をお互いに対して概して一定の速度で移動させるように構成することができる。図心182および184の位置と第1および第2の部位165および167の面積との間の非線形関係(non-linear relation)を、例えば参照表としてコントローラに保存することができる。
【0080】
LCDモジュレータ
LCDモジュレータ160が、図9にさらに詳しく示されている。図9を参照すると、モジュレータ160は、第1のガラス板352と第2のガラス板354との間に配置された液晶材料層350を備えている。第1のガラス板352は、柱状に配置された複数の透明電極356を備えている。電極356が、図3に示した複数の素子162の各々の範囲を定めている。各々の電極356に、例えばワイヤボンディングまたはフレキシブル回路による接続であってよいコネクタ358が組み合わせられている。コネクタ358は、図6に示したコントローラ220の出力部228への接続を容易にするヘッダ360につながっている。第2のガラス板354は、すべての素子162のための共通電極として機能する透明な面電極(図示せず)を備えている。さらにモジュレータ160は、第1の直線偏光特性(この場合には、垂直偏光)を有する第1の偏光板362を備えている。第1の偏光板362は、第1の電極356を覆っている。さらにモジュレータ160は、第2の電極を覆っており、第2の直線偏光特性(この場合には、水平偏光)を有している第2の偏光板364を備えている。図9において、各層は比例尺で示されているわけではない。
【0081】
モジュレータ駆動部226が、ヘッダ360およびコネクタ358を介して各々の電極356へと駆動電圧をもたらし、共通電極が、接地への接続として機能する。一実施形態においては、駆動電圧が、電圧V+およびV−の間を変化する50%のデューティサイクルの矩形波であってよく、電圧は、LCDモジュレータ160に衝突する光の透過と遮断との間に充分なコントラストをもたらすように安全な動作電圧の範囲において選択される。
【0082】
第1の偏光板362が、垂直偏光を有する光を通す。この実施形態においては、液晶材料350が、弛緩した状態(駆動されていない)にあるときには液晶を通過する光の偏光に影響を及ぼさず、したがって光が第2の偏光板364によって遮られるように選択されている。電極356のいずれかへと印加される駆動電圧によって駆動されると、液晶材料のうちの電極の下方に位置する部分が、光に偏光の90°の変化を生じさせ、結果として光がモジュレータ160を通過する。第1および第2の複数の電極356のために駆動信号を交互に生成することによって、モジュレータ160は、第1および第2の部位165および167のそれぞれにおいて光を交互に遮る。その後に駆動信号を受け取る電極356の数を変化させることによって、撮像経路152の第1および第2の部位の範囲を変化させ、図3に図心182および184によって表わされている第1および第2の透視点の位置を変化させることができる。好都合には、充分な数の電極356を設けることによって、視点の概して滑らかな変化を促進することで、2Dから3D撮像への視覚的に当惑するような移行が防止される。
【0083】
別の実施形態においては、LCDモジュレータが駆動電圧が印加されていないときに透過性であるよう、偏光板362および364がどちらも垂直偏光であってよい。駆動電圧によって駆動されたとき、液晶材料が光に90°の偏光の変化を生じさせ、結果として素子356が光の通過を阻止する。
【0084】
空間モジュレータの実施形態
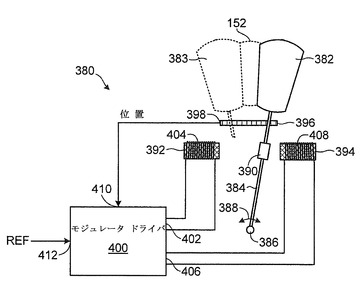
図10を参照すると、別の実施形態においては、図3に示したモジュレータ160を、全体として380で示されている空間モジュレータ(spatial modulator)を使用して実現することができる。空間モジュレータ380は、アーム384に取り付けられた不透明なシャッターブレード(shutter blade)382を備えている。アーム384は、横から横への運動をもたらすためにピボット(pivot、旋回軸部)386に取り付けられている。アーム384は、アームの途中に取り付けられた磁石390をさらに備えている。磁石390は、第1および第2の電磁石392および394の間に配置されている。シャッターブレード382、アーム384、ピボット386、ならびに電磁石392および394が協働し、シャッターブレード382を382に示されている第1の位置と383に破線の輪郭で示されている第2の位置との間で矢印388の方向に横から横へと動かすための力を生み出すように動作することができる機械式のアクチュエータを構成している。第1および第2の位置382および383が、図3に示した単一の撮像経路152の変化する第1および第2の部位の範囲を定める。
【0085】
空間モジュレータは、アーム384の背後に位置する位置センサー396をさらに備えている。位置センサー396は、位置センサーに対するアーム384の位置を表わす位置信号を生成するための出力398を備えている。一実施形態においては、位置センサー396を直線フォトダイオードアレイを使用して実現することができ、背景迷光または発光ダイオードなどの光源からの照明(図示せず)が、アレイ上に影を投じる。影となったアレイの素子の位置を、出力398においてフォトダイオードアレイから読み出すことができ、種々の補間方法が、アーム384の中心位置を割り出すために使用される。
【0086】
空間モジュレータ380を駆動するために、図6に示したモジュレータ駆動部226を、図10に示されるモジュレータ駆動部400によって置き換えることができる。モジュレータ駆動部400は、第1の電磁石392のコイル404を駆動するための第1の1対の出力402と、第2の電磁石394のコイル408を駆動するための第2の1対の出力406とを備えている。モジュレータ駆動部400は、位置センサー396から位置信号を受信するための入力410をさらに備えている。モジュレータ駆動部400は、アーム384の所望の交互の位置を表わす基準信号を受信するための入力412をさらに備えている。基準信号は、アーム384およびシャッターブレード382の交互の目標位置を定めており、CP信号に応答してコントローラ220によって生成することができる。
【0087】
空間モジュレータ380およびモジュレータ駆動部400が協働し、撮像経路(152に破線の輪郭で示されている)の遮光の範囲を変化させるべくアーム384およびシャッターブレード382の交互の運動を生成するためのフィードバック制御ループを実現する。動作時、モジュレータ駆動部400の入力412において受信される基準信号が、アーム384の目標位置をもたらす一方で、入力410において受信される位置信号が、アームの実際の位置を表わし、モジュレータ駆動部400を駆動するための誤差信号を生成するために使用することができる。このようにして、フィードバック制御ループが、電磁石392および394によってアーム384に対して駆動力を作用させて所望の位置に向かって移動させるために、出力402および406に駆動信号を生成する。好都合には、駆動部を、電磁石392および394のうちの一方が磁石390に引力をもたらす一方で、他方の電磁石が反発力をもたらす押し引き式の駆動部として実現することができる。
【0088】
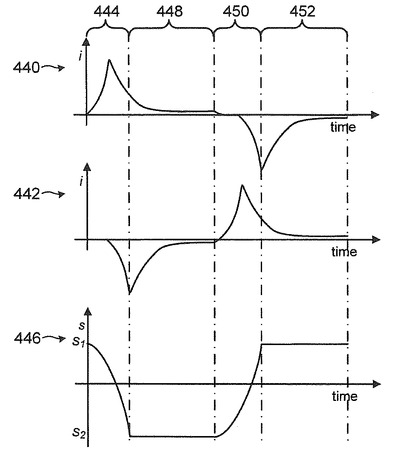
アーム384を第1の電磁石392に向かって移動させるべくコイル404および408へと供給される電流駆動の典型的な波形が、図11に概略的に示されている。コイル404を通過する電流波形が440で示されており、コイル408を通過する電流波形が442で示されている。入力412に基準信号REFによってもたらされる交互の目標位置が、それぞれs1およびs2である。
【0089】
第1の時間期間444においては、目標位置と現在位置との間の差から導出される誤差信号が大きく、アーム384に引力を生じさせるべく位置電流440を急激に増加させる。引力がアーム384の慣性に打ち勝ち、アームを第2の電磁石394から離れるように加速させる。位置センサーの出力398に生成されるアーム384の瞬時位置sが、図11に446でグラフ表示されており、図11においては、電磁石392および394の間の中間の位置が、グラフ上のs=0に示されており、目標位置がs2である。時間期間444においては、最初は電流442がゼロであり、ひとたびアーム384が加速を始めると、電流442が、所望のアーム位置s2に近付くにつれて減速力をもたらすために急激に増加する。アーム384が位置s2に停止し、アーム384を第2の時間期間448のあいだ位置s2に維持するようにフィードバック制御ループによって継続的に調節されるコイル404および408の各々の保持電流によってこの位置に保持される。第2の時間期間448が、第1の画像の取得を完了するために充分な時間を提供する。
【0090】
次いで、入力412の基準信号が、目標位置s1を新たな目標位置として定めるように変化する。第3の時間期間450において、電流442は、極性を変化させ、アーム384をアーム384の慣性に打ち勝って第1の電磁石392から遠ざかるように加速させる引力を生じさせるために急激に増加する。第3の時間期間450において、電流440は、最初にゼロへと低下でき、ひとたびアーム384が加速を始めると、目標位置s1に近付くにつれて減速力をもたらすために急激に増加する。アーム384が位置s1に停止し、アーム384を第4の時間期間452のあいだ位置s1に維持するようにフィードバック制御ループによって継続的に調節されるコイル404および408の各々の保持電流によってこの位置に保持される。第4の時間期間452が、第2の画像の取得を完了するために充分な時間を提供する。
【0091】
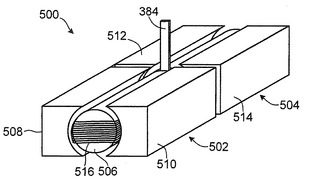
図12を参照すると、空間モジュレータ380(図11に示されている)のアクチュエータ部分の別の実施形態が、全体として500で示されている。アクチュエータ500は、モータ部502および回転位置センサー部504を備えている。共通のロータシャフト506が、モータ部502および位置センサー部504を貫いて延びている。アーム384が、横から横への移動のためにシャフトへと取り付けられている。一般に、モータ部502が、アーム384を動かすための駆動力をもたらす一方で、位置センサー部504が、位置信号をもたらす。
【0092】
一実施形態においては、モータ部502が、1対の磁石508および510を使用して実現され、センサー部504が、1対の磁石512および514を使用して実現される。シャフト506が、磁石508および510の間にアクチュエータコイル516を支持する。アクチュエータコイル516が、駆動電流を受け取るためにモジュレータの出力402へと接続され、この駆動電流が、コイルにおいてトルクを生じさせ、このトルクがシャフト506へと加えられる。センサー部504は、磁石512および514の間に位置するピックアップコイル(図示せず)をさらに備えている。ピックアップコイルが、回転変位に比例した電流信号を生成し、この信号を、入力410における位置信号として使用することができる。一般に、アクチュエータ500は、アナログメータの動きと同様に動作する。
【0093】
他の実施形態においては、モータ部502を、シャフト506が磁化され、コイルが磁極片(すなわち、508および510)の周囲に巻き付けられるように、構成することができる。同様に、センサー部504のピックアップコイルを、磁極片(すなわち、512および514)の周囲に巻き付けることができる。
【0094】
光バルブの実施形態
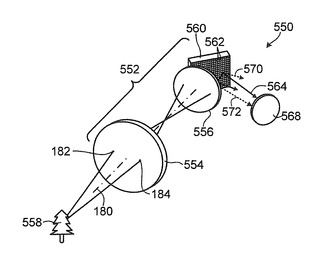
図13を参照すると、光学撮像装置(図3に示されている)の別の実施形態が、全体として550で示されている。装置550は、第1のレンズ554と第2のレンズ556とを有する単一の撮像経路552を備えており、第1のレンズ554および第2のレンズ556は、これら第1および第2のレンズの視野内の物体558からの光線を受信するように配置されている。装置550は、駆動されたときにレンズ568を通って光のビームを案内するように配置された複数の個別に駆動されるミラー素子562を有している光バルブモジュレータ560を備えている。非駆動の状態においては、ミラー素子562は、レンズ568から遠ざかるように光のビームを案内する。ミラー素子162の第1および第2のグループを駆動するようにモジュレータ560へと駆動信号を供給することによって、モジュレータを、図3に示したモジュレータ160に関してすでに説明した交互の様相で駆動することができる。
【0095】
他の実施形態
別の実施形態においては、図9に示したLCDモジュレータ160において、第2の偏光板364を省略し、モジュレータを透過光の偏光を選択的に変化させるように構成することができる。図9を参照すると、第1の偏光板362は、垂直偏光を有する光だけを通す。したがって、液晶材料350のうちの非駆動の電極356の下方の部分は、垂直偏光の光として通過する光の偏光にいかなる影響も与えない。液晶材料350のうちの被駆動の電極356の下方の部分は、光に偏光の90°の変化を生じさせ、結果として透過光が水平偏光を有する。
【0096】
このように交互に構成されるモジュレータを図3に示した光学撮像装置150において使用することで、結果として、第1の画像が垂直偏光を有し、第2の画像が水平偏光を有する。あるいは、LCDモジュレータ160の液晶材料350を、右円偏光の光を有する第1の画像および左円偏光の光を有する第2の画像を生成するように構成することができる。
【0097】
センサー174を、個々のセンサーアレイ素子の前面に偏光素子を追加することによって第1および第2のそれぞれの画像を同時に受け取るように構成することができる。例えば、単一の偏光の向きについてのみ感度を有する偏光に関して選択的なピクセルをもたらすために、隣接するセンサーピクセルを交互に水平偏光および垂直偏光にすることができる。このようにして、センサーが、第1および第2の両方の画像を同時に受け取ることを可能にすると考えられる。第1および第2の画像を、アレイの読み出しの際または別途の処理工程において分離することができる。
【0098】
本発明の特定の実施形態を説明および図示したが、そのような実施形態は、あくまでも本発明の例示にすぎないと理解されるべきであり、添付の特許請求の範囲に従って解釈される本発明を限定するものと考えるべきではない。
【技術分野】
【0001】
本発明は、概しては、三次元画像情報の生成に関し、特に、単一の撮像経路を用いる三次元画像情報の生成に関する。
【背景技術】
【0002】
撮像(imaging)は、一般に、光景(scene)内の物体(object)によって放射または反射された放射線を適切な画像センサーによって受信することによって、該光景の表示像(representation)を生成することを有する。撮像され得る放射線のいくつかの例として、可視光、赤外光または熱、高周波、音波、ならびに超音波を挙げることができる。
【0003】
三次元(3D)の光景は、奥行き情報を含んでいるが、奥行き情報は、多くの撮像システムにおいて二次元(2D)の画像平面へと写像され、したがって保存されることがない。従来のカメラが、奥行き情報が保存されず、結果として光景の2D画像表現がもたらされる光学的な撮像システムの例である。立体視光学系(stereoscopic optical systems)が、異なる透視点からの別々の画像を生成することによって奥行き情報を表わす画像を生成することができる。奥行き情報を、例えば光景内の地点間の3D測定を生成するために使用することができる。あるいは、ユーザが少なくとも画像において或る程度の奥行きが表現された画像ビューを知覚できるよう、別々の画像をユーザの左および右のそれぞれの眼へと提示することができる。このように、立体視システムは、実際の光景を眺める人間の眼の働きを模擬する空間的に別々の透視点を有する画像を生成する。画像を、或る種の能動的な眼鏡類を使用して眺めることができ、あるいはユーザの左および右のそれぞれの眼に向かって空間的に別々の画像を投影するように表示装置を動作させることによって眺めることができる。
【0004】
立体視撮像(stereoscopic imaging)の使用は、外科手術における応用が見出されており、そこでは、外科医に3Dの視界を提供するために3D内視鏡が使用され得る。立体視撮像は、海底探索といった遠隔作業においても有用となり得、そこではロボットアクチュエータから離れた場所に位置する作業者へと3D画像情報を提供することによって、該アクチュエータの制御の助けになる。立体視撮像の他の用途を、身体計測システムおよび娯楽産業においても見出すことができる。
【発明の概要】
【0005】
本発明の1つの態様によれば、関連する視野(associated field of view)を持った単一の撮像経路を用いて三次元画像情報を生成する方法が提供される。当該方法は、前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するステップを有し、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該方法は、また、前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるステップを有し、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該方法は、さらに、前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するステップを有する。
【0006】
前記第1および第2の画像を選択的に受信するステップは、画像センサーにおいて前記第1および第2の画像を受信するステップを含んでいてもよく、かつ、前記透過の変化を補償するステップは、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーと関係する露出を増加させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーと関係する利得を減少させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させるステップ、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させるステップ
のうちの1つを含んでいてもよい。
【0007】
前記第1および第2の画像を選択的に受信するステップは、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮るステップと、
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮るステップとを、
交互に含んでいてもよい。
【0008】
前記撮像経路の前記第1および第2の部位を交互に遮るステップは、
前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるステップを含んでいてもよい。
【0009】
前記遮断素子を移動させるステップは、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するステップ、
前記遮断素子の位置を表わす位置信号を受信するステップ、および
前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するステップ
を含んでいてもよい。
【0010】
前記撮像経路の前記第1および第2の部位を交互に遮るステップは、前記撮像経路の前記第1および第2の部位を選択的に遮るために、前記撮像経路の開口面の付近に位置する光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0011】
前記光学素子は、複数の素子を含んでいてもよく、かつ、前記第1および第2の領域を選択的に作動させるステップは、前記複数の素子のうちの第1の複数の素子、および
前記複数の素子のうちの第2の複数の素子のうちの一方を選択的に作動させるステップを含んでいてもよい。
【0012】
前記複数の素子の各々の素子は、駆動信号の受信に応答して作動させられるように動作することができものであってよく、
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップは、前記第1および第2の複数の素子の素子数を選択的に変化させて前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように駆動信号を生成するステップを含んでいてもよい。
【0013】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップは、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0014】
前記透過性の光学素子の第1および第2の領域を選択的に作動させるステップは、液晶素子および光バルブのうちの一方の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0015】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップは、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通る光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0016】
前記反射性の光学素子の第1および第2の領域を選択的に作動させるステップは、複数の可動ミラー素子を有する光バルブの第1および第2の領域を選択的に作動させるステップを含んでいてもよい。
【0017】
前記第1および第2の画像を選択的に受信するステップは、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信するステップ、および
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成するステップ
を含んでいてもよい。
【0018】
前記第1の画像の受信は、第1の偏光状態を有する第1の画像の受信を含んでいてもよく、前記第2の画像の受信は、第2の偏光状態を有する第2の画像の受信を含んでいてもよく、
前記第1および第2の画像の分離が、第1の偏光状態の放射線に応答する第1の複数の素子と、第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイにおいて、前記第1および第2の画像を受信することを含んでいてもよい。
【0019】
当該方法は、前記第1の偏光状態を有する前記第1の画像を生成すること、および、前記第2の偏光状態を有する前記第2の画像を生成することをさらに含んでいてもよい。
【0020】
前記範囲を変化させるステップは、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップを含んでいてもよい。
【0021】
前記制御信号を生成するステップをさらに含んでいてもよい。
【0022】
前記第1の透視点の位置は、第1の図心の位置によって定められてもよく、前記第2の透視点の位置は、第2の図心の位置によって定められてもよく、
前記制御信号を生成するステップは、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成するステップを含んでいてもよい。
【0023】
前記第1の透視点の位置は、第1の図心の位置によって定められてもよく、前記第2の透視点の位置は、第2の図心の位置によって定められてもよく、
前記範囲を変化させるステップは、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるステップを含んでいてもよい。
【0024】
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップは、前記範囲を、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
のうちの一方をもたらすように変化させるステップを含んでいてもよい。
【0025】
前記第1および第2の画像を受信するステップは、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信するステップを含んでいてもよい。
【0026】
本発明の他の態様によれば、関連する視野を持った単一の撮像経路を使用して三次元画像情報を生成するための装置が提供される。当該装置は、前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するための手段を有し、該手段は、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該装置は、また、前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるための手段を有し、該手段は、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該装置は、さらに、前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するための手段を有するものである。
【0027】
本発明の他の態様によれば、三次元画像情報を生成するための装置が提供される。当該装置は、関連する視野を持った単一の撮像経路を有する。当該装置は、また、第1および第2の画像を前記単一の撮像経路の第1および第2のそれぞれの部位を通して選択的に受信させるよう作動可能に構成された画像モジュレータを有し、該画像モジュレータは、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有している。前記第1および第2の画像は協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものである。当該装置は、前記モジュレータと通信するコントローラを有し、該コントローラは、前記第1および第2の画像を受信しつつ前記モジュレータによって前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させる信号を生成するよう作動可能に構成され、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものである。当該装置は、前記第1および第2の部位の前記範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するよう作動可能に構成された補償部をさらに有する。
【0028】
前記単一の撮像経路は、画像センサーに前記第1および第2の画像を生成するよう作動可能に構成されていてもよく、
前記補償部は、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーに関係する露出を増加させること、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーに関係する露出を減少させること、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させること、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させること
のうちの1つによって前記透過の前記変化を補償するよう作動可能に構成されていてもよい。
【0029】
前記モジュレータは、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮ること、および
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮ること
を交互に実行するよう作動可能に構成されていてもよい。
【0030】
前記モジュレータは、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるよう作動可能に構成されていてもよい。
【0031】
前記モジュレータは、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するためのアクチュエータを有していてもよく、
前記遮断素子の位置を表わす位置信号を生成するよう作動可能に構成された位置センサーを有していてもよく、かつ、
前記コントローラは、前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するよう作動可能に構成されていてもよい。
【0032】
前記モジュレータは、第1および第2の領域を有する光学素子を備えていてもよく、該第1および第2の領域は、前記撮像経路の前記第1および第2の部位を選択的に遮るべく選択的に作動させられるよう作動可能に構成されていてもよい。
【0033】
前記光学素子は、複数の素子を含んでいてもよく、
前記第1の領域は、第1の複数の素子を含んでいてもよく、前記第2の領域は、第2の複数の素子を含んでいてもよく、前記第1および第2の複数が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるべく選択されてもよい。
【0034】
前記複数の素子の各々の素子は、駆動信号の受信に応答して作動させられるように動作することができるものであってよく、
当該装置は、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるために、前記第1および第2の複数の素子の素子数を選択的に変化させるべく前記駆動信号を生成するよう作動可能に構成されたモジュレータ駆動部をさらに備えていてもよい。
【0035】
前記モジュレータは、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されていてもよい。
【0036】
前記モジュレータは、液晶素子および光バルブのうちの一方を備えていてもよい。
【0037】
前記モジュレータは、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通って受信される光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されていてもよい。
【0038】
前記モジュレータは、複数の可動ミラー素子を有する光バルブを備えていてもよい。
【0039】
前記モジュレータは、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信すること、および、
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成すること、
を行うよう作動可能に構成されていてもよい。
【0040】
前記モジュレータは、第1の偏光状態を有する第1の画像と第2の偏光状態を有する前記第2の画像とを生成するよう作動可能に構成された第1および第2の偏光領域を有する偏光板を備えていてもよく、
当該装置は、前記第1の偏光状態の放射線に応答する第1の複数の素子と前記第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイをさらに備えていてもよく、該センサーアレイは、前記第1および第2の画像を分離すべく動作することができるようになっていてもよい。
【0041】
前記モジュレータは、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるよう作動可能に構成されていてもよい。
【0042】
前記コントローラは、前記制御信号を生成すべく動作可能に構成されていてもよい。
【0043】
前記第1の透視点の位置は、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記コントローラが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成することによって、前記制御信号を生成するよう作動可能に構成されていてもよい。
【0044】
前記第1の透視点の位置は、第1の図心の位置によって定められ、前記第2の透視点の位置は、第2の図心の位置によって定められ、
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるよう作動可能に構成されていてもよい。
【0045】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように動作可能に構成されていてもよく、それは、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
の一方をもたらすように前記範囲を変化させることによってなされるものであってよい。
【0046】
前記撮像経路は、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信することによって前記第1および第2の画像を受信するよう作動可能に構成されていてもよい。
【0047】
本発明の他の態様と特徴は、添付の図面と関連させた本発明の具体的な実施形態についての以下の説明を検討することによって、当業者に明らかになるであろう。
図面には、本発明の実施形態が示されている。
【図面の簡単な説明】
【0048】
【図1】図1は、三次元画像情報を生成するための本発明の第1の実施形態による装置の上面概略図である。
【図2】図2は、図1に示した装置の撮像経路の正面概略図である。
【図3】図3は、三次元画像情報を生成するための本発明の別の実施形態による光学撮像装置の斜視図である。
【図4】図4は、図3に示した光学撮像装置の線4−4に沿って得た断面図である。
【図5】図5は、図3に示した光学撮像装置によって生成された第1および第2の画像を示している。
【図6】図6は、図3に示した光学撮像装置の動作を制御するためのコントローラのブロック図である。
【図7】図7は、図6に示したコントローラによって実行される制御プロセスを説明するプロセスフロー図である。
【図8】図8A〜図8Dは、図3に示した光学撮像装置によって生成される一連の第1および第2の画像を示している。
【図9】図9は、図3に示した光学撮像装置において使用される液晶モジュレータの斜視図である。
【図10】図10は、本発明の別の実施形態による空間モジュレータの概略図である。
【図11】図11は、図10に示した空間モジュレータを制御するための制御信号のグラフ表示である。
【図12】図12は、図10に示した空間モジュレータにおいて使用されるアクチュエータの別の実施形態の斜視図である。
【図13】図13は、三次元画像情報を生成するための光学撮像装置の別の実施形態の斜視図である。
【発明を実施するための形態】
【0049】
図1を参照すると、三次元画像情報を生成するための本発明の第1の実施形態による装置が、概略の上面図にて、全体として100で示されている。当該装置100は、視野104(field of view)を有する単一の撮像経路(imaging path)102を備えており、この実施形態においては、視野104が物体106を含んでいる。さらに装置100は、単一の撮像経路102の第1および第2のそれぞれの部位112および114を介して選択的に受信される第1および第2の画像(図1において、「A」および「B」として概念的に示されている)を生成するように作動可能に構成された画像モジュレータ108を備えている。
【0050】
図2を参照すると、この実施形態においては、撮像経路が円形であり、第1および第2の部位112および114の各々が、概して円の一部分を含んでいる。第1の部位112は、視野104内に第1の図心(centroid)116によって表わされる第1の透視点(perspective viewpoint)を定めている。第2の部位114は、視野104内に第2の図心118によって表わされる第2の透視点を定めている。他の実施形態においては、撮像経路は円形でなくてもよい。
【0051】
さらに、当該装置100は、モジュレータ108と通信するコントローラ120を備えている。該コントローラ120は、制御信号を生成するための出力部122を備えており、該制御信号は、第1および第2の透視点116および118の位置を変化させるように機能することができ、それによって、第1および第2の画像を受信しつつ、モジュレータ108によって撮像経路の第1および第2の部位112および114の広がりを変化させてるものである。透視点116および118の位置の変化は、視野104内の物体106の三次元空間属性の表現に、それに対応する変化をもたらす。
【0052】
さらに、当該装置100は、補償部124を備えている。補償部124は、第1および第2の部位の広がりを変化させるときに第1および第2の画像AおよびBの各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、撮像経路102の第1および第2の部位112および114の透過の変化を補償するように作用可能に構成されている。
【0053】
第1および第2の画像AおよびBは、画像平面126に形成され、第1および第2の画像が協働して、物体106および視野104内の他の物体の三次元空間属性(three dimensional attributes)を表わすように機能することができる。この実施形態においては、さらにコントローラ120が、透視(perspective)の所望の変更についてのユーザの入力を受信するための入力部128を備えており、コントローラが、ユーザの入力に応答して出力部122に制御信号を生成するように作動可能に構成されている。
【0054】
一実施形態においては、撮像経路102は、画像を生成するために光放射を受信すべく動作することができる光学撮像経路であってよい。光放射は、赤外、可視、および紫外の波長範囲にある波長範囲を有することができる。他の実施形態においては、撮像経路102は、音響、超音波、または高周波信号の受信に応答して画像を生成するよう作動可能であってよい。画像平面126における画像を、種々の記録方法および/または媒体のいずれかを使用する任意の適切な撮像装置によって取得することができる。例えば、撮像装置は、画像の記録のために感光フィルムまたは電荷結合素子(CCD)アレイを有しているスチルカメラまたはムービーカメラであってよい。あるいは、例えば音響または超音波による撮像に、圧電性結晶のアレイを使用することができ、高周波による撮像に、アンテナまたはアンテナアレイを使用することができる。
【0055】
好都合には、単一の撮像経路102が、撮像経路の組み立てに通常必要とされる位置合わせ(alignments)以外の特別な位置合わせを必要とせずに、3D情報を知覚および/または抽出することができるAおよびB画像を生成する。対照的に、別々の撮像経路または2つの離間した撮像経路へと光学的に分割される撮像経路を使用する場合、位置合わせにかなりの困難が存在し、小さな位置合わせのずれが存在するだけで、ユーザにとって眼の疲れまたは他の不快な影響が生じる可能性がある。
【0056】
光学的撮像の実施形態
図3を参照すると、三次元画像情報を生成するための光学撮像装置の実施形態が、全体として150で示されている。光学撮像装置150は、第1のレンズ154と第2のレンズ156とを有する単一の撮像経路152を備えており、第1のレンズ154および第2のレンズ156が、これら第1および第2のレンズの視野内の物体158からの光線を受信するように配置されている。
【0057】
光学撮像装置150は、複数の素子162を有する液晶装置(LCD)モジュレータ160をさらに備えている。各々の素子162が、第1の画像を受信している撮像経路152の第1の部分165と第2の画像を受信している撮像経路の第2の部分167とを交互に遮るように選択的に制御することができるモジュレータ160の前面領域164の柱状部分を定めている。モジュレータ160は、複数の制御入力166をさらに備えており、各々の素子162に、素子を選択的に動作させるための操作信号を受信するための制御入力が組み合わせられている。
【0058】
光学撮像装置150は、第3のレンズ172とCCD画像センサー174とを有するカメラ170をさらに備えており、CCD画像センサー174が、カメラ170の画像平面に位置している。カメラは、スチルカメラまたはビデオカメラであってよく、可視または不可視の光に対して感度を有することができる。第3のレンズ172が、モジュレータ160を透過した光を集め、画像センサー174上に画像を形成する。画像センサー174は、感光領域176と、1つ以上の制御入力178とを備えており、該制御入力は、画像の取得(キャプチャ)に関するセンサーの動作を制御するように動作することができる種々の制御信号を受信するためのものである。全般的には、画像センサー174は、感光素子の空間アレイを有しており、各素子が、素子への入射光に比例した電荷を蓄積する。蓄積した電荷を、隣に接続された素子を通って電荷を電荷増幅器へと順次移すことによって画像センサー174から読み出すことができ、電荷増幅器が、電荷を該当の素子に入射した光を表わす電圧信号に変換する。他の実施形態においては、画像センサー174は、相補型−金属酸化物−半導体(CMOS)アクティブ画素センサーまたは他の電子画像センサーであってよい。あるいは、画像センサー174は、例えば35mmフィルムなどの感光フィルム乳剤であってよい。
【0059】
画像センサー174、第3のレンズ172、液晶モジュレータ160、第1のレンズ154、第2のレンズ156、およびカメラ170は、すべて光軸180に沿って位置合わせされている。
【0060】
当該装置150が、図4に断面にて示されており、撮像経路152が、物体158上の軸外の点から生じる束または円錐状の放射線(rays)190によって照らされている。一般に、図3および図4に示したような光学系においては、いずれか1つの光学素子の直径が、束190のうちのどの放射線が光学系を通過できるかを制限し、この直径が、系の開口を定める。開口と物体158との間に位置する光学面による系の開口の画像が、系のための入射瞳(entrance pupil)の位置と広がりとを定める。次いで、該入射瞳が、撮像経路を通過することができる放射線の束を定める。この場合、第1のレンズ154が、系の開口(system aperture、系のアパーチャ)であり、したがって入射瞳でもあると仮定され、第1のレンズに衝突する放射線が、撮像経路152を通って伝えられる。他の実施形態においては、入射瞳が、レンズの構成に応じて、第1のレンズ154の前または後ろに位置してもよい。
【0061】
このようにして、第1のレンズ154に進入する束190の放射線は、第2のレンズ156によって集光され、モジュレータ160の前面領域164に衝突する。部分的遮蔽(モジュレータ160の第1の部位165の作動など)が、撮像経路152の系の開口の後ろに位置する場合、画像の口径食(vignetting)が生じる。この場合、放射線の束190のうちの放射線192が、モジュレータ160の前面領域164の第1の部位165によって遮られ、センサー174の感光領域176に達しない。放射線の束190のうちの放射線194は、モジュレータ160を通過し、レンズ172によって感光領域176へと集光される。口径食により、センサー174の感光領域176に形成される画像の全体的な照明が減少する。しかしながら、放射線194が、センサー174の感光領域176に交わるため、真の画像がセンサーに形成される。さらに、モジュレータによって引き起こされる口径食は、入射瞳における視界の角度を変化させない。
【0062】
物体158上の他の点も、同様に撮像され、センサー174の感光領域176に物体158の第1の画像が生み出される。図4に示した口径食の状態のもとで光学撮像装置150によって生成される第1の画像が、図5において、全体として200で示されている。画像200が、図心182(図1に示されている)によって表わされる右の透視点に対応する。同様に、第1の部位165が光を通す一方で、モジュレータ160の反対側の複数の素子162を光を遮るように制御すべく、モジュレータ160へと制御信号を供給することで、第2の画像202(図5に示されている)が、装置150によって生成される。第2の画像202が、図心184(図1に示されている)によって表わされる左の透視点に対応する。
【0063】
第1および第2の画像200および202が協働し、視野内の物体の三次元空間属性を表わす情報を含んでいる。例えば、画像200および画像202を別々に(右眼を使用して画像200を、左眼を使用して画像202を)眺めるユーザが、ユーザが物体を直接眺める場合に知覚されると考えられるものと同様の奥行きの効果を知覚することができる。一実施形態においては、画像を、例えば立体視眼鏡を使用することによってユーザの左および右のそれぞれの眼へと別々に案内することができる。
【0064】
コントローラ
光学撮像装置150(図3に示されている)の動作を制御するためのコントローラが、図6において220で示されている。コントローラ220は、典型的にはパルス列を備えている同期信号(SYNC)を生成するための出力部222を備えている。出力部222は、画像センサー174における画像の取得を同期させるために、画像センサーの入力部178に連絡している。さらにコントローラ220は、画像強度の補償を制御するための補償信号(COMP)を生成するための出力部224を備えている。図示の実施形態においては、出力部224が、画像センサーの入力部178に連絡し、画像センサーが、図1に示した補償部124として機能する。他の実施形態においては、出力部224に生成されるCOMP信号を、撮像経路が受け取る放射線の束を減少または増加させるために、光学系の調節式の虹彩などの開口絞り補償部を制御するために使用することができる。電子制御の自動虹彩ダイアフラムが、正しい画像の露出を保証するために開口サイズおよび露出を自動的に選択するカメラにおいて一般的に使用されている。
【0065】
コントローラ220は、モジュレータ160の制御入力部166を駆動するための出力部228を有しているモジュレータ駆動部226をさらに備えている。図示の実施形態においては、出力部228が、モジュレータ160の素子162の数に一致する「n」個の出力チャネルを有している。さらにコントローラ220は、視点変更(CP)のユーザ入力を受信するための入力部230を備えている。例えば、CPの入力230は、入力部に変化する電位をもたらすように構成された、バイアスが加えられた単極双投スイッチ(single-pole-double-throw switch)から得ることができる。
【0066】
一実施形態においては、コントローラ220を、例えばマイクロコントローラなどのプロセッサ回路を使用して実現することができる。
【0067】
コントローラの動作
光学撮像装置150の動作の制御におけるコントローラ220の動作を、図3、図6、および図7を参照してさらに説明する。図7を参照すると、コントローラ220によって実行される制御プロセスの一実施形態が、全体として250で示されている。
【0068】
252に示されているように、このプロセスは、コントローラ220が入力部230のCP信号に関係する信号状態を検出することで始まる。254に示されるように、CP信号の状態が変化しており、すなわちユーザが画像の視点の変更を望んでいることを示している場合、プロセスは256に続く。
【0069】
その場合、256に示されるように、補償部が、CP信号に応答して光の損失または増加の予測を生成する。コントローラ220がマイクロコントローラを使用して実現される実施形態においては、光の損失または増加の予測を、入力部230において検出されたCP信号の状態の変化について計算することができる。あるいは、光の損失または増加の予測が、あらかじめ計算されて参照表としてプロセッサ回路のメモリに保存されていてもよい。次いで、光の損失または増加の予測が、個々の画像センサー174を駆動するために適したフォーマットの補償信号(COMP)をコントローラの出力部224に生成するために使用される。例えば、画像センサー174がフルフレームCCDアーキテクチャを備える実施形態においては、CCDアレイによって取得される光の量を、焦点面の近傍の機械式のシャッター(図示せず)によって制御することができ、その場合には、COMP信号が、所望の画像強度を生成するための適切なシャッター速度で機械式のシャッターを作動させるように構成されると考えられる。あるいは、フレーム転送またはインターライン転送CCDデバイスにおいては、COMP信号が、CCD素子が連続する画像の取得の間の時間の一部においてのみ光を受け取るように設定されるよう、画像の取得の光蓄積段階をゲーティングするためのゲート信号であってよい。いくつかのCCDセンサーも、アナログの電荷増幅および/または電荷信号のアナログ−デジタル変換に関係する利得の調節を可能にしており、この利得を、第1および第2の画像の強度を補償するためにCOMP信号によって制御することもできる。次いで、プロセスは、258に続く。
【0070】
254において、CP信号の状態が変化していない場合、補償すべき光の損失/増加は存在せず、プロセスは、直接258に続く。
【0071】
258に示されるように、モジュレータ160が、CP信号の状態に従って第1の画像の取得に合わせて設定され、そのような設定は、モジュレータ160の第1の複数の素子162を光を遮るように制御すべく第1の複数のn個のチャネル228を駆動するようにモジュレータを設定することを含む。260において、第1の画像の取得が、コントローラが出力部222にSYNCパルスを生成するときに開始される。取得された第1の画像を、例えば磁気テープ、メモリ、ハードドライブ、または感光乳剤などの画像記憶媒体(図示せず)にアナログまたはデジタルフォーマットで記録することができる。
【0072】
次いで、262に示されるように、モジュレータ160が、モジュレータ160の第2の複数の素子162を光を遮るように制御すべく出力部228の第2の複数のn個のチャネル228を駆動するようにモジュレータを設定することによって、第2の画像の取得に合わせて設定される。264において、第2の画像の取得が、コントローラが出力部222に第2のSYNCパルスを生成するときに開始される。
【0073】
静止画の取得においては、第1および第2の透視点182および184の各々から単一の画像だけが必要であり、この場合には、SYNC信号が、第1および第2の時間に関して隔てられた同期パルスを生成すると考えられる。パルス間の時間間隔は、画像センサー174に画像を生成するために充分な光子を蓄積するために充分な時間が与えられるように選択される。順次的なビデオ画像の形態で景色の変化を取得するためには、選択される映像フォーマットによってフレームレートが決まる可能性があり(例えば、NTSCビデオにおいては毎秒29.97フレーム)、その場合には、SYNCH信号が、ノンインターレースの画像の取得については約33.3ミリ秒の時間間隔の複数のパルスを含むことができる。特定のカメラの画像取得レートが充分に高速である場合、ユーザの各々の眼が完全なNTSCのフレームレートでそれぞれの画像を受け取るよう、第1および第2の画像を16.7ミリ秒の時間間隔で取得することができる。連続するビデオフレームを取得する場合、プロセスは、ブロック264の後でブロック252に続き、プロセス250が繰り返される。
【0074】
視点の変化を示す撮像経路152の一連の図が、図8に示されている。図8Aを参照すると、撮像経路152が端面図にて示されており、図心182および184が、撮像経路の中心軸に位置している。これらの状況下で、モジュレータ160の第1および第2の部位のどちらも、光を遮るようには制御されておらず、第1の画像(A)および第2の画像(B)は同一である。左および右のそれぞれの眼を使用してそれぞれのAおよびB画像を眺めるユーザは、標準的な二次元(2D)画像だけを知覚し、三次元(3D)の奥行きの知覚は不可能である。
【0075】
図8Bを参照すると、今や図心182および184が外側へと移動しており、これらの状況のもとで、モジュレータ160の第1および第2の部位165および167が、透過が撮像経路152の部位300および302を交互に通って生じるよう、光を遮るように交互に制御される。得られるAおよびB画像は、わずかに異なる透視点を有しており、それぞれのAおよびB画像を眺めるユーザが、各々の眼へと提示される画像の異なる視点ゆえに、少なくとも或る程度の3Dの奥行きを知覚することができる。
【0076】
図8Cを参照すると、図心182および184が、透過が撮像経路152の部位300および302を交互に通って生じるように、さらに外側へと再び移動している。得られるAおよびB画像は、図8Bよりもさらに大きく異なる透視点を有しており、それぞれのAおよびB画像を眺めるユーザが、さらに大きな程度の3Dの奥行きを知覚することができる。
【0077】
図8Dを参照すると、図心182および184が、撮像経路152の領域304がモジュレータ160の第1の部位165およびモジュレータの第2の部位167のどちらによっても遮られるような程度にまで離間している。透過が、撮像経路152の部位300および302を交互に通って生じる。得られるAおよびB画像は、図8Cよりもさらに大きく異なる透視点を有しており、さらに大きな程度の3Dの奥行きの知覚をもたらす。
【0078】
明らかに、図8Aおよび図8Dの間で、モジュレータ160を透過する光の量が、順に減少している。しかしながら、光の減少に、COMP信号に応答しての対応する露出の増加が付随することで、概して一定な画像強度レベルの知覚が生み出される。好都合には、装置150が、得られる画像における2Dから3D画像表現への知覚の滑らかな変化を促進する。取得されたAおよびB画像を、ユーザの左眼および右眼へと異なるAおよびB画像を提示するために特別な眼鏡類またはヘッドギアを使用する特別に構成された3D表示システムを使用して眺めることができる。あるいは、画像を、特別な眼鏡またはヘッドギアを使用せずに眺めることができる3D画像情報を表示することができる自動立体表示装置を使用して表示してもよい。
【0079】
一般に、モジュレータ160が矩形の断面を有する場合、図心182および184の位置の変化の速度は、第1および第2の部位165および167の面積の変化の速度につれて線形に変化するわけではない。したがって、図8A〜図8Dに示した画像間の滑らかな移行をもたらすために、コントローラを、三次元空間属性の表現の滑らかな変化をもたらすために、第1および第2の図心182および184をお互いに対して概して一定の速度で移動させるように構成することができる。図心182および184の位置と第1および第2の部位165および167の面積との間の非線形関係(non-linear relation)を、例えば参照表としてコントローラに保存することができる。
【0080】
LCDモジュレータ
LCDモジュレータ160が、図9にさらに詳しく示されている。図9を参照すると、モジュレータ160は、第1のガラス板352と第2のガラス板354との間に配置された液晶材料層350を備えている。第1のガラス板352は、柱状に配置された複数の透明電極356を備えている。電極356が、図3に示した複数の素子162の各々の範囲を定めている。各々の電極356に、例えばワイヤボンディングまたはフレキシブル回路による接続であってよいコネクタ358が組み合わせられている。コネクタ358は、図6に示したコントローラ220の出力部228への接続を容易にするヘッダ360につながっている。第2のガラス板354は、すべての素子162のための共通電極として機能する透明な面電極(図示せず)を備えている。さらにモジュレータ160は、第1の直線偏光特性(この場合には、垂直偏光)を有する第1の偏光板362を備えている。第1の偏光板362は、第1の電極356を覆っている。さらにモジュレータ160は、第2の電極を覆っており、第2の直線偏光特性(この場合には、水平偏光)を有している第2の偏光板364を備えている。図9において、各層は比例尺で示されているわけではない。
【0081】
モジュレータ駆動部226が、ヘッダ360およびコネクタ358を介して各々の電極356へと駆動電圧をもたらし、共通電極が、接地への接続として機能する。一実施形態においては、駆動電圧が、電圧V+およびV−の間を変化する50%のデューティサイクルの矩形波であってよく、電圧は、LCDモジュレータ160に衝突する光の透過と遮断との間に充分なコントラストをもたらすように安全な動作電圧の範囲において選択される。
【0082】
第1の偏光板362が、垂直偏光を有する光を通す。この実施形態においては、液晶材料350が、弛緩した状態(駆動されていない)にあるときには液晶を通過する光の偏光に影響を及ぼさず、したがって光が第2の偏光板364によって遮られるように選択されている。電極356のいずれかへと印加される駆動電圧によって駆動されると、液晶材料のうちの電極の下方に位置する部分が、光に偏光の90°の変化を生じさせ、結果として光がモジュレータ160を通過する。第1および第2の複数の電極356のために駆動信号を交互に生成することによって、モジュレータ160は、第1および第2の部位165および167のそれぞれにおいて光を交互に遮る。その後に駆動信号を受け取る電極356の数を変化させることによって、撮像経路152の第1および第2の部位の範囲を変化させ、図3に図心182および184によって表わされている第1および第2の透視点の位置を変化させることができる。好都合には、充分な数の電極356を設けることによって、視点の概して滑らかな変化を促進することで、2Dから3D撮像への視覚的に当惑するような移行が防止される。
【0083】
別の実施形態においては、LCDモジュレータが駆動電圧が印加されていないときに透過性であるよう、偏光板362および364がどちらも垂直偏光であってよい。駆動電圧によって駆動されたとき、液晶材料が光に90°の偏光の変化を生じさせ、結果として素子356が光の通過を阻止する。
【0084】
空間モジュレータの実施形態
図10を参照すると、別の実施形態においては、図3に示したモジュレータ160を、全体として380で示されている空間モジュレータ(spatial modulator)を使用して実現することができる。空間モジュレータ380は、アーム384に取り付けられた不透明なシャッターブレード(shutter blade)382を備えている。アーム384は、横から横への運動をもたらすためにピボット(pivot、旋回軸部)386に取り付けられている。アーム384は、アームの途中に取り付けられた磁石390をさらに備えている。磁石390は、第1および第2の電磁石392および394の間に配置されている。シャッターブレード382、アーム384、ピボット386、ならびに電磁石392および394が協働し、シャッターブレード382を382に示されている第1の位置と383に破線の輪郭で示されている第2の位置との間で矢印388の方向に横から横へと動かすための力を生み出すように動作することができる機械式のアクチュエータを構成している。第1および第2の位置382および383が、図3に示した単一の撮像経路152の変化する第1および第2の部位の範囲を定める。
【0085】
空間モジュレータは、アーム384の背後に位置する位置センサー396をさらに備えている。位置センサー396は、位置センサーに対するアーム384の位置を表わす位置信号を生成するための出力398を備えている。一実施形態においては、位置センサー396を直線フォトダイオードアレイを使用して実現することができ、背景迷光または発光ダイオードなどの光源からの照明(図示せず)が、アレイ上に影を投じる。影となったアレイの素子の位置を、出力398においてフォトダイオードアレイから読み出すことができ、種々の補間方法が、アーム384の中心位置を割り出すために使用される。
【0086】
空間モジュレータ380を駆動するために、図6に示したモジュレータ駆動部226を、図10に示されるモジュレータ駆動部400によって置き換えることができる。モジュレータ駆動部400は、第1の電磁石392のコイル404を駆動するための第1の1対の出力402と、第2の電磁石394のコイル408を駆動するための第2の1対の出力406とを備えている。モジュレータ駆動部400は、位置センサー396から位置信号を受信するための入力410をさらに備えている。モジュレータ駆動部400は、アーム384の所望の交互の位置を表わす基準信号を受信するための入力412をさらに備えている。基準信号は、アーム384およびシャッターブレード382の交互の目標位置を定めており、CP信号に応答してコントローラ220によって生成することができる。
【0087】
空間モジュレータ380およびモジュレータ駆動部400が協働し、撮像経路(152に破線の輪郭で示されている)の遮光の範囲を変化させるべくアーム384およびシャッターブレード382の交互の運動を生成するためのフィードバック制御ループを実現する。動作時、モジュレータ駆動部400の入力412において受信される基準信号が、アーム384の目標位置をもたらす一方で、入力410において受信される位置信号が、アームの実際の位置を表わし、モジュレータ駆動部400を駆動するための誤差信号を生成するために使用することができる。このようにして、フィードバック制御ループが、電磁石392および394によってアーム384に対して駆動力を作用させて所望の位置に向かって移動させるために、出力402および406に駆動信号を生成する。好都合には、駆動部を、電磁石392および394のうちの一方が磁石390に引力をもたらす一方で、他方の電磁石が反発力をもたらす押し引き式の駆動部として実現することができる。
【0088】
アーム384を第1の電磁石392に向かって移動させるべくコイル404および408へと供給される電流駆動の典型的な波形が、図11に概略的に示されている。コイル404を通過する電流波形が440で示されており、コイル408を通過する電流波形が442で示されている。入力412に基準信号REFによってもたらされる交互の目標位置が、それぞれs1およびs2である。
【0089】
第1の時間期間444においては、目標位置と現在位置との間の差から導出される誤差信号が大きく、アーム384に引力を生じさせるべく位置電流440を急激に増加させる。引力がアーム384の慣性に打ち勝ち、アームを第2の電磁石394から離れるように加速させる。位置センサーの出力398に生成されるアーム384の瞬時位置sが、図11に446でグラフ表示されており、図11においては、電磁石392および394の間の中間の位置が、グラフ上のs=0に示されており、目標位置がs2である。時間期間444においては、最初は電流442がゼロであり、ひとたびアーム384が加速を始めると、電流442が、所望のアーム位置s2に近付くにつれて減速力をもたらすために急激に増加する。アーム384が位置s2に停止し、アーム384を第2の時間期間448のあいだ位置s2に維持するようにフィードバック制御ループによって継続的に調節されるコイル404および408の各々の保持電流によってこの位置に保持される。第2の時間期間448が、第1の画像の取得を完了するために充分な時間を提供する。
【0090】
次いで、入力412の基準信号が、目標位置s1を新たな目標位置として定めるように変化する。第3の時間期間450において、電流442は、極性を変化させ、アーム384をアーム384の慣性に打ち勝って第1の電磁石392から遠ざかるように加速させる引力を生じさせるために急激に増加する。第3の時間期間450において、電流440は、最初にゼロへと低下でき、ひとたびアーム384が加速を始めると、目標位置s1に近付くにつれて減速力をもたらすために急激に増加する。アーム384が位置s1に停止し、アーム384を第4の時間期間452のあいだ位置s1に維持するようにフィードバック制御ループによって継続的に調節されるコイル404および408の各々の保持電流によってこの位置に保持される。第4の時間期間452が、第2の画像の取得を完了するために充分な時間を提供する。
【0091】
図12を参照すると、空間モジュレータ380(図11に示されている)のアクチュエータ部分の別の実施形態が、全体として500で示されている。アクチュエータ500は、モータ部502および回転位置センサー部504を備えている。共通のロータシャフト506が、モータ部502および位置センサー部504を貫いて延びている。アーム384が、横から横への移動のためにシャフトへと取り付けられている。一般に、モータ部502が、アーム384を動かすための駆動力をもたらす一方で、位置センサー部504が、位置信号をもたらす。
【0092】
一実施形態においては、モータ部502が、1対の磁石508および510を使用して実現され、センサー部504が、1対の磁石512および514を使用して実現される。シャフト506が、磁石508および510の間にアクチュエータコイル516を支持する。アクチュエータコイル516が、駆動電流を受け取るためにモジュレータの出力402へと接続され、この駆動電流が、コイルにおいてトルクを生じさせ、このトルクがシャフト506へと加えられる。センサー部504は、磁石512および514の間に位置するピックアップコイル(図示せず)をさらに備えている。ピックアップコイルが、回転変位に比例した電流信号を生成し、この信号を、入力410における位置信号として使用することができる。一般に、アクチュエータ500は、アナログメータの動きと同様に動作する。
【0093】
他の実施形態においては、モータ部502を、シャフト506が磁化され、コイルが磁極片(すなわち、508および510)の周囲に巻き付けられるように、構成することができる。同様に、センサー部504のピックアップコイルを、磁極片(すなわち、512および514)の周囲に巻き付けることができる。
【0094】
光バルブの実施形態
図13を参照すると、光学撮像装置(図3に示されている)の別の実施形態が、全体として550で示されている。装置550は、第1のレンズ554と第2のレンズ556とを有する単一の撮像経路552を備えており、第1のレンズ554および第2のレンズ556は、これら第1および第2のレンズの視野内の物体558からの光線を受信するように配置されている。装置550は、駆動されたときにレンズ568を通って光のビームを案内するように配置された複数の個別に駆動されるミラー素子562を有している光バルブモジュレータ560を備えている。非駆動の状態においては、ミラー素子562は、レンズ568から遠ざかるように光のビームを案内する。ミラー素子162の第1および第2のグループを駆動するようにモジュレータ560へと駆動信号を供給することによって、モジュレータを、図3に示したモジュレータ160に関してすでに説明した交互の様相で駆動することができる。
【0095】
他の実施形態
別の実施形態においては、図9に示したLCDモジュレータ160において、第2の偏光板364を省略し、モジュレータを透過光の偏光を選択的に変化させるように構成することができる。図9を参照すると、第1の偏光板362は、垂直偏光を有する光だけを通す。したがって、液晶材料350のうちの非駆動の電極356の下方の部分は、垂直偏光の光として通過する光の偏光にいかなる影響も与えない。液晶材料350のうちの被駆動の電極356の下方の部分は、光に偏光の90°の変化を生じさせ、結果として透過光が水平偏光を有する。
【0096】
このように交互に構成されるモジュレータを図3に示した光学撮像装置150において使用することで、結果として、第1の画像が垂直偏光を有し、第2の画像が水平偏光を有する。あるいは、LCDモジュレータ160の液晶材料350を、右円偏光の光を有する第1の画像および左円偏光の光を有する第2の画像を生成するように構成することができる。
【0097】
センサー174を、個々のセンサーアレイ素子の前面に偏光素子を追加することによって第1および第2のそれぞれの画像を同時に受け取るように構成することができる。例えば、単一の偏光の向きについてのみ感度を有する偏光に関して選択的なピクセルをもたらすために、隣接するセンサーピクセルを交互に水平偏光および垂直偏光にすることができる。このようにして、センサーが、第1および第2の両方の画像を同時に受け取ることを可能にすると考えられる。第1および第2の画像を、アレイの読み出しの際または別途の処理工程において分離することができる。
【0098】
本発明の特定の実施形態を説明および図示したが、そのような実施形態は、あくまでも本発明の例示にすぎないと理解されるべきであり、添付の特許請求の範囲に従って解釈される本発明を限定するものと考えるべきではない。
【特許請求の範囲】
【請求項1】
関連する視野を持った単一の撮像経路を用いて三次元画像情報を生成する方法であって、当該方法は、
前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するステップを有し、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるステップを有し、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するステップを有する、
前記方法。
【請求項2】
前記第1および第2の画像を選択的に受信するステップが、画像センサーにおいて前記第1および第2の画像を受信するステップを含んでおり、
前記透過の変化を補償するステップが、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーと関係する露出を増加させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーと関係する利得を減少させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させるステップ、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させるステップ
のうちの1つを含んでいる、請求項1に記載の方法。
【請求項3】
前記第1および第2の画像を選択的に受信するステップが、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮るステップと、
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮るステップとを、
交互に含んでいる、請求項1に記載の方法。
【請求項4】
前記撮像経路の前記第1および第2の部位を交互に遮るステップが、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるステップを含んでいる、請求項3に記載の方法。
【請求項5】
前記遮断素子を移動させるステップが、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するステップ、
前記遮断素子の位置を表わす位置信号を受信するステップ、および
前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するステップ
を含んでいる、請求項4に記載の方法。
【請求項6】
前記撮像経路の前記第1および第2の部位を交互に遮るステップが、前記撮像経路の前記第1および第2の部位を選択的に遮るために、前記撮像経路の開口面の付近に位置する光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項3に記載の方法。
【請求項7】
前記光学素子が、複数の素子を含んでおり、
前記第1および第2の領域を選択的に作動させるステップが、
前記複数の素子のうちの第1の複数の素子、および
前記複数の素子のうちの第2の複数の素子
のうちの一方を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項8】
前記複数の素子の各々の素子が、駆動信号の受信に応答して作動させられるように動作することができ、
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップが、前記第1および第2の複数の素子の素子数を選択的に変化させて前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように駆動信号を生成するステップを含んでいる、請求項7に記載の方法。
【請求項9】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップが、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項10】
前記透過性の光学素子の第1および第2の領域を選択的に作動させるステップが、液晶素子および光バルブのうちの一方の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項9に記載の方法。
【請求項11】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップが、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通る光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項12】
前記反射性の光学素子の第1および第2の領域を選択的に作動させるステップが、複数の可動ミラー素子を有する光バルブの第1および第2の領域を選択的に作動させるステップを含んでいる、請求項11に記載の方法。
【請求項13】
前記第1および第2の画像を選択的に受信するステップが、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信するステップ、および
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成するステップ
を含んでいる、請求項1に記載の方法。
【請求項14】
前記第1の画像の受信が、第1の偏光状態を有する第1の画像の受信を含んでおり、前記第2の画像の受信が、第2の偏光状態を有する第2の画像の受信を含んでおり、
前記第1および第2の画像の分離が、第1の偏光状態の放射線に応答する第1の複数の素子と、第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイにおいて、前記第1および第2の画像を受信することを含んでいる、請求項13に記載の方法。
【請求項15】
前記第1の偏光状態を有する前記第1の画像を生成すること、および、前記第2の偏光状態を有する前記第2の画像を生成することをさらに含んでいる、請求項14に記載の方法。
【請求項16】
前記範囲を変化させるステップが、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップを含んでいる、請求項1に記載の方法。
【請求項17】
前記制御信号を生成するステップをさらに含んでいる、請求項16に記載の方法。
【請求項18】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記制御信号を生成するステップが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成するステップを含んでいる、請求項17に記載の方法。
【請求項19】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記範囲を変化させるステップが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるステップを含んでいる、請求項1に記載の方法。
【請求項20】
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップが、前記範囲を、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
のうちの一方をもたらすように変化させるステップを含んでいる、請求項19に記載の方法。
【請求項21】
前記第1および第2の画像を受信するステップが、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信するステップを含んでいる、請求項1に記載の方法。
【請求項22】
関連する視野を持った単一の撮像経路を使用して三次元画像情報を生成するための装置であって、当該装置は、
前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するための手段を有し、該手段は、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるための手段を有し、該手段は、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するための手段を有するものである、
前記装置。
【請求項23】
三次元画像情報を生成するための装置であって、当該装置は、
関連する視野を持った単一の撮像経路を有し、
第1および第2の画像を前記単一の撮像経路の第1および第2のそれぞれの部位を通して選択的に受信させるよう作動可能に構成された画像モジュレータを有し、該画像モジュレータは、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記モジュレータと通信するコントローラを有し、該コントローラは、前記第1および第2の画像を受信しつつ前記モジュレータによって前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させる信号を生成するよう作動可能に構成され、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の前記範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するよう作動可能に構成された補償部を有する、
前記装置。
【請求項24】
前記単一の撮像経路が、画像センサーに前記第1および第2の画像を生成するよう作動可能に構成されており、
前記補償部が、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーに関係する露出を増加させること、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーに関係する露出を減少させること、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させること、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させること
のうちの1つによって前記透過の前記変化を補償するよう作動可能に構成されている、請求項23に記載の装置。
【請求項25】
前記モジュレータが、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮ること、および
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮ること
を交互に実行するよう作動可能に構成されている、請求項23に記載の装置。
【請求項26】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるよう作動可能に構成されている、請求項25に記載の装置。
【請求項27】
前記モジュレータが、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するためのアクチュエータを有し、
前記遮断素子の位置を表わす位置信号を生成するよう作動可能に構成された位置センサーを有し、かつ、
前記コントローラが、前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するよう作動可能に構成されている、請求項26に記載の装置。
【請求項28】
前記モジュレータが、第1および第2の領域を有する光学素子を備えており、該第1および第2の領域が、前記撮像経路の前記第1および第2の部位を選択的に遮るべく選択的に作動させられるよう作動可能に構成されている、請求項25に記載の装置。
【請求項29】
前記光学素子が、複数の素子を含んでおり、
前記第1の領域が、第1の複数の素子を含んでおり、前記第2の領域が、第2の複数の素子を含んでおり、前記第1および第2の複数が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるべく選択される、請求項28に記載の装置。
【請求項30】
前記複数の素子の各々の素子が、駆動信号の受信に応答して作動させられるように動作することができ、
当該装置が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるために、前記第1および第2の複数の素子の素子数を選択的に変化させるべく前記駆動信号を生成するよう作動可能に構成されたモジュレータ駆動部をさらに備えている、請求項29に記載の装置。
【請求項31】
前記モジュレータが、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されている、請求項28に記載の装置。
【請求項32】
前記モジュレータが、液晶素子および光バルブのうちの一方を備えている、請求項31に記載の装置。
【請求項33】
前記モジュレータが、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通って受信される光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されている、請求項28に記載の装置。
【請求項34】
前記モジュレータが、複数の可動ミラー素子を有する光バルブを備えている、請求項33に記載の装置。
【請求項35】
前記モジュレータが、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信すること、および、
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成すること
を行うよう作動可能に構成されている、請求項23に記載の装置。
【請求項36】
前記モジュレータが、第1の偏光状態を有する第1の画像と第2の偏光状態を有する前記第2の画像とを生成するよう作動可能に構成された第1および第2の偏光領域を有する偏光板を備えており、
当該装置が、前記第1の偏光状態の放射線に応答する第1の複数の素子と前記第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイをさらに備えており、該センサーアレイが、前記第1および第2の画像を分離すべく動作することができる、請求項35に記載の装置。
【請求項37】
前記モジュレータが、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるよう作動可能に構成されている、請求項23に記載の装置。
【請求項38】
前記コントローラが、前記制御信号を生成すべく動作可能に構成されている、請求項37に記載の装置。
【請求項39】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、かつ、
前記コントローラが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成することによって、上記の制御信号を生成するよう作動可能に構成されている、請求項38に記載の装置。
【請求項40】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるよう作動可能に構成されている、請求項23に記載の装置。
【請求項41】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように動作可能に構成されており、それは、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
の一方をもたらすように前記範囲を変化させることによってなされるものである、請求項40に記載の装置。
【請求項42】
前記撮像経路が、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信することによって前記第1および第2の画像を受信するよう作動可能に構成されている、請求項23に記載の装置。
【請求項1】
関連する視野を持った単一の撮像経路を用いて三次元画像情報を生成する方法であって、当該方法は、
前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するステップを有し、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるステップを有し、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するステップを有する、
前記方法。
【請求項2】
前記第1および第2の画像を選択的に受信するステップが、画像センサーにおいて前記第1および第2の画像を受信するステップを含んでおり、
前記透過の変化を補償するステップが、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーと関係する露出を増加させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーと関係する利得を減少させるステップ、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させるステップ、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させるステップ
のうちの1つを含んでいる、請求項1に記載の方法。
【請求項3】
前記第1および第2の画像を選択的に受信するステップが、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮るステップと、
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮るステップとを、
交互に含んでいる、請求項1に記載の方法。
【請求項4】
前記撮像経路の前記第1および第2の部位を交互に遮るステップが、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるステップを含んでいる、請求項3に記載の方法。
【請求項5】
前記遮断素子を移動させるステップが、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するステップ、
前記遮断素子の位置を表わす位置信号を受信するステップ、および
前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するステップ
を含んでいる、請求項4に記載の方法。
【請求項6】
前記撮像経路の前記第1および第2の部位を交互に遮るステップが、前記撮像経路の前記第1および第2の部位を選択的に遮るために、前記撮像経路の開口面の付近に位置する光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項3に記載の方法。
【請求項7】
前記光学素子が、複数の素子を含んでおり、
前記第1および第2の領域を選択的に作動させるステップが、
前記複数の素子のうちの第1の複数の素子、および
前記複数の素子のうちの第2の複数の素子
のうちの一方を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項8】
前記複数の素子の各々の素子が、駆動信号の受信に応答して作動させられるように動作することができ、
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップが、前記第1および第2の複数の素子の素子数を選択的に変化させて前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように駆動信号を生成するステップを含んでいる、請求項7に記載の方法。
【請求項9】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップが、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項10】
前記透過性の光学素子の第1および第2の領域を選択的に作動させるステップが、液晶素子および光バルブのうちの一方の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項9に記載の方法。
【請求項11】
前記光学素子の前記第1および第2の領域を選択的に作動させるステップが、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通る光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるステップを含んでいる、請求項6に記載の方法。
【請求項12】
前記反射性の光学素子の第1および第2の領域を選択的に作動させるステップが、複数の可動ミラー素子を有する光バルブの第1および第2の領域を選択的に作動させるステップを含んでいる、請求項11に記載の方法。
【請求項13】
前記第1および第2の画像を選択的に受信するステップが、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信するステップ、および
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成するステップ
を含んでいる、請求項1に記載の方法。
【請求項14】
前記第1の画像の受信が、第1の偏光状態を有する第1の画像の受信を含んでおり、前記第2の画像の受信が、第2の偏光状態を有する第2の画像の受信を含んでおり、
前記第1および第2の画像の分離が、第1の偏光状態の放射線に応答する第1の複数の素子と、第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイにおいて、前記第1および第2の画像を受信することを含んでいる、請求項13に記載の方法。
【請求項15】
前記第1の偏光状態を有する前記第1の画像を生成すること、および、前記第2の偏光状態を有する前記第2の画像を生成することをさらに含んでいる、請求項14に記載の方法。
【請求項16】
前記範囲を変化させるステップが、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップを含んでいる、請求項1に記載の方法。
【請求項17】
前記制御信号を生成するステップをさらに含んでいる、請求項16に記載の方法。
【請求項18】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記制御信号を生成するステップが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成するステップを含んでいる、請求項17に記載の方法。
【請求項19】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記範囲を変化させるステップが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるステップを含んでいる、請求項1に記載の方法。
【請求項20】
前記撮像経路の前記第1および第2の部位の前記範囲を変化させるステップが、前記範囲を、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
のうちの一方をもたらすように変化させるステップを含んでいる、請求項19に記載の方法。
【請求項21】
前記第1および第2の画像を受信するステップが、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信するステップを含んでいる、請求項1に記載の方法。
【請求項22】
関連する視野を持った単一の撮像経路を使用して三次元画像情報を生成するための装置であって、当該装置は、
前記単一の撮像経路の第1および第2のそれぞれの部位を通して第1および第2の画像を選択的に受信するための手段を有し、該手段は、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記第1および第2の画像を受信しつつ、前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させるための手段を有し、該手段は、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するための手段を有するものである、
前記装置。
【請求項23】
三次元画像情報を生成するための装置であって、当該装置は、
関連する視野を持った単一の撮像経路を有し、
第1および第2の画像を前記単一の撮像経路の第1および第2のそれぞれの部位を通して選択的に受信させるよう作動可能に構成された画像モジュレータを有し、該画像モジュレータは、前記第1の部位が、前記視野内の第1の透視点を有しており、前記第2の部位が、前記視野内の第2の透視点を有しており、前記第1および第2の画像が協働して、前記視野内の物体の三次元空間属性を表現するように働くことができるものであり、
前記モジュレータと通信するコントローラを有し、該コントローラは、前記第1および第2の画像を受信しつつ前記モジュレータによって前記撮像経路の前記第1および第2の部位の範囲を変化させて前記第1および第2の透視点の位置を変化させる信号を生成するよう作動可能に構成され、前記透視点の位置の変化により、前記三次元空間属性の前記表現に対応する変化がもたらされるものであり、かつ、
前記第1および第2の部位の前記範囲を変化させるときに、前記第1および第2の画像の各々に関係する画像強度が概して一定の画像強度レベルに維持されるように、前記撮像経路の前記第1および第2の部位を通過する透過の変化を補償するよう作動可能に構成された補償部を有する、
前記装置。
【請求項24】
前記単一の撮像経路が、画像センサーに前記第1および第2の画像を生成するよう作動可能に構成されており、
前記補償部が、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記画像センサーに関係する露出を増加させること、
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記画像センサーに関係する露出を減少させること、
前記撮像経路の前記第1および第2の部位の範囲の減少に応答して、前記撮像経路を通過する全体としての透過を増大させること、および
前記撮像経路の前記第1および第2の部位の範囲の増大に応答して、前記撮像経路を通過する全体としての透過を減少させること
のうちの1つによって前記透過の前記変化を補償するよう作動可能に構成されている、請求項23に記載の装置。
【請求項25】
前記モジュレータが、
前記第2の画像を受信しつつ前記撮像経路の前記第1の部位を遮ること、および
前記第1の画像を受信しつつ前記撮像経路の前記第2の部位を遮ること
を交互に実行するよう作動可能に構成されている、請求項23に記載の装置。
【請求項26】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記変化する範囲を定めるために、前記撮像経路の開口面の付近に位置する遮断素子を、前記撮像経路内の第1および第2の位置の間で移動させるよう作動可能に構成されている、請求項25に記載の装置。
【請求項27】
前記モジュレータが、
前記遮断素子を前記第1および第2の位置の一方に向かって交互に移動させるべく働くことができる力を生成するためのアクチュエータを有し、
前記遮断素子の位置を表わす位置信号を生成するよう作動可能に構成された位置センサーを有し、かつ、
前記コントローラが、前記遮断素子を前記第1および第2の位置の前記一方に停止させるために、前記位置信号に応答して前記力の大きさを制御するよう作動可能に構成されている、請求項26に記載の装置。
【請求項28】
前記モジュレータが、第1および第2の領域を有する光学素子を備えており、該第1および第2の領域が、前記撮像経路の前記第1および第2の部位を選択的に遮るべく選択的に作動させられるよう作動可能に構成されている、請求項25に記載の装置。
【請求項29】
前記光学素子が、複数の素子を含んでおり、
前記第1の領域が、第1の複数の素子を含んでおり、前記第2の領域が、第2の複数の素子を含んでおり、前記第1および第2の複数が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるべく選択される、請求項28に記載の装置。
【請求項30】
前記複数の素子の各々の素子が、駆動信号の受信に応答して作動させられるように動作することができ、
当該装置が、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるために、前記第1および第2の複数の素子の素子数を選択的に変化させるべく前記駆動信号を生成するよう作動可能に構成されたモジュレータ駆動部をさらに備えている、請求項29に記載の装置。
【請求項31】
前記モジュレータが、前記単一の撮像経路の前記第1および第2のそれぞれの部位に光を通すように配置された透過性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されている、請求項28に記載の装置。
【請求項32】
前記モジュレータが、液晶素子および光バルブのうちの一方を備えている、請求項31に記載の装置。
【請求項33】
前記モジュレータが、前記単一の撮像経路の前記第1および第2のそれぞれの部位を通って受信される光を反射させるように配置された反射性の光学素子の第1および第2の領域を選択的に作動させるよう作動可能に構成されている、請求項28に記載の装置。
【請求項34】
前記モジュレータが、複数の可動ミラー素子を有する光バルブを備えている、請求項33に記載の装置。
【請求項35】
前記モジュレータが、
第1の画像属性を有する第1の画像および第2の画像属性を有する第2の画像を同時に受信すること、および、
前記第1および第2の画像を前記第1および第2の画像属性に従って分離し、第1および第2のそれぞれの画像の表現を生成すること
を行うよう作動可能に構成されている、請求項23に記載の装置。
【請求項36】
前記モジュレータが、第1の偏光状態を有する第1の画像と第2の偏光状態を有する前記第2の画像とを生成するよう作動可能に構成された第1および第2の偏光領域を有する偏光板を備えており、
当該装置が、前記第1の偏光状態の放射線に応答する第1の複数の素子と前記第2の偏光状態の放射線に応答する第2の複数の素子とを有するセンサーアレイをさらに備えており、該センサーアレイが、前記第1および第2の画像を分離すべく動作することができる、請求項35に記載の装置。
【請求項37】
前記モジュレータが、制御信号に応答して前記撮像経路の前記第1および第2の部位の前記範囲を変化させるよう作動可能に構成されている、請求項23に記載の装置。
【請求項38】
前記コントローラが、前記制御信号を生成すべく動作可能に構成されている、請求項37に記載の装置。
【請求項39】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、かつ、
前記コントローラが、前記三次元空間属性の前記表現に滑らかな変化をもたらすように前記第1および第2の図心を概して一定の速度でお互いに対して移動させるように働くことができる制御信号を生成することによって、上記の制御信号を生成するよう作動可能に構成されている、請求項38に記載の装置。
【請求項40】
前記第1の透視点の位置が、第1の図心の位置によって定められ、前記第2の透視点の位置が、第2の図心の位置によって定められ、
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を、
前記第1および第2の図心の位置が近くに位置することで、前記第1および第2の画像がもっぱら前記視野の範囲内の二次元空間属性を含む第1の範囲と、
前記第1および第2の図心の位置が離れることで、前記第1および第2の画像が三次元空間属性情報をより高い度合いで含む第2の範囲と
の間で変化させるよう作動可能に構成されている、請求項23に記載の装置。
【請求項41】
前記モジュレータが、前記撮像経路の前記第1および第2の部位の前記範囲を変化させるように動作可能に構成されており、それは、
二次元から三次元への移行の効果を生み出すための前記第1の範囲から前記第2の範囲への滑らかな移行、および
三次元から二次元への移行の効果を生み出すための前記第2の範囲から前記第1の範囲への滑らかな移行
の一方をもたらすように前記範囲を変化させることによってなされるものである、請求項40に記載の装置。
【請求項42】
前記撮像経路が、前記視野内の主題の時間変化を表わす複数の第1および第2の画像を順次に受信することによって前記第1および第2の画像を受信するよう作動可能に構成されている、請求項23に記載の装置。
【図5】


【図6】
【図9】
【図10】
【図11】
【図12】
【図13】
【図1】
【図2】
【図3】
【図4】
【図7】
【図8】
【図6】
【図9】
【図10】
【図11】
【図12】
【図13】
【図1】
【図2】
【図3】
【図4】
【図7】
【図8】
【公表番号】特表2012−532347(P2012−532347A)
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2012−518701(P2012−518701)
【出願日】平成21年7月10日(2009.7.10)
【国際出願番号】PCT/CA2009/000957
【国際公開番号】WO2011/003168
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(512006192)アイエスイーイースリーディー インコーポレイテッド (1)
【Fターム(参考)】
【公表日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成21年7月10日(2009.7.10)
【国際出願番号】PCT/CA2009/000957
【国際公開番号】WO2011/003168
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(512006192)アイエスイーイースリーディー インコーポレイテッド (1)
【Fターム(参考)】
[ Back to top ]