
単一の磁気抵抗センサを使用して磁場の平面方向の磁場コンポーネントを決定するのための装置および方法
【課題】平面に適用された磁場を測定する方法を提供する。
【解決手段】第1の交流ドライブ電流を第1のストラップに適用し、第1のストラップの少なくとも一部が、磁気抵抗センサの上に横たわり、第1のストラップが、第1の方向Xに延びる大きさを有することを特徴とし、第2の交流ドライブ電流を第2のストラップに同時に適用し、第2のストラップの少なくとも一部が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向Yに延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場に影響を受けることを特徴とする。
【解決手段】第1の交流ドライブ電流を第1のストラップに適用し、第1のストラップの少なくとも一部が、磁気抵抗センサの上に横たわり、第1のストラップが、第1の方向Xに延びる大きさを有することを特徴とし、第2の交流ドライブ電流を第2のストラップに同時に適用し、第2のストラップの少なくとも一部が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向Yに延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場に影響を受けることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
[001] バッチを使用している平面フィールドの2つのコンポーネントが切断およびパッケージを必要とせずに同じ基板上の装置を組み立てたと感じることが可能なことは望ましい。現在利用できる技術は、隣接したトンネル接合上のアニーリング直交(annealing-in orthogonal)ピン固定された層(Pinned Layer)/リファレンス層(Reference Layer)(PL/RL)磁化方向によって、この課題を解決する。
【背景技術】
【0002】
[002] 磁気トンネル接合(MTJ)は、高い磁気抵抗比率を有する(すなわち(Rmax-Rmin)/Rmin =ΔR/R)の100の%のオーダーの、そして、磁場の高水準に適度に現在使用する。磁気トンネル接合も、高い1/fノイズを有する。低周波の高いノイズ密度は、kHzのオーダーより少ない周波数で磁場のレベルを測定しないためのMTJの使用を予防する。
【発明の概要】
【課題を解決するための手段】
【0003】
[003] 本発明は、平面(X−Y)に適用された磁場(450)を測定する方法である。第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、測定される適用された磁場が、平面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、平面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、平面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法。
【0004】
[004] 請求された発明のさまざまな実施形態の詳細は、添付の図面および下記の説明に記載される。他の特徴および効果は、説明、図面および請求項から明らかになる。
【図面の簡単な説明】
【0005】
【図1A】[005] 図1Aは、本発明の多層磁気抵抗センサ、第1のドライブ・ストラップ、および、第2のドライブ・ストラップの一実施形態のブロック図である、
【図1B】[006] 図1Bは、図1Aの磁気抵抗センサのX−Y平面の角周波数で、周期的に回転している磁気ドライブ磁場を示す、
【図2A】[007] 図2Aは、本発明の磁気トンネル接合(電気的接点)、第1のドライブ・ストラップ、および、第2のドライブ・ストラップの一実施形態のブロック図である。
【図2B】[008] 図2Bは、巨大な磁気抵抗器(電気的接点)、第1のドライブ・ストラップ、および、本発明の第2のドライブ・ストラップの一実施形態のブロック図である。
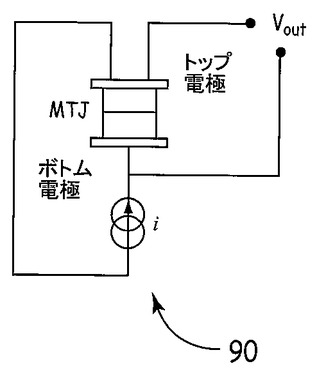
【図3A】[009] 図3Aは、本発明の図2Aの磁気トンネル接合の出力電圧を測定する回路の一実施形態のブロック図である、
【図3B】[010] 図3Bは、本発明の図2Bの巨大な磁気抵抗器の出力電圧を測定する回路の一実施形態のブロック図である、
【図4A】[011] 図4Aは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。
【図4B】図4Bは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。
【図5A】[012] 図5Aは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のためのシミュレーションされた出力を示す。
【図5B】図5Bは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のためのシミュレーションされた出力を示す。
【図6】[013] 図6は、本発明の磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である、
【図7】[014] 図7は、ドライブ電流のテーラーメード形状の実施形態を示す。
【図8】[015] 図8は、本発明の平面の印加磁場を測定する方法の一実施形態のフロー図である。
【発明を実施するための形態】
【0006】
[016] 種々の図面中の同じ参照番号および指示は、同じエレメントを表す。
[0017] 磁気抵抗(MR)センサが、磁場または地球の磁場の小さい変化の小さな値が検出されなければならないいかなる用途において、磁気コンパス、磁気異常検知、ギア-歯検知などに関して用いられる。フラックスゲートおよび超伝導クアンタムインターフェースデバイス(SQUIDs)は、磁場の測定小さな値または磁場の小さな変化を測定できるバルクレベル磁気センサである。
【0007】
[0018] チップ・スケール磁気抵抗センサは、ローコストで作られることができ、このように大きさレベル磁気抵抗センサに勝る利点である。異方性の磁気抵抗(AMR)センサ、GMRセンサおよびMTJセンサは、チップ・スケールで製造される。GMRおよびMTJスタックは、その間でスイッチで切り替え可能な磁化方位、固定する磁化方位を有する強磁性リファレンス層および障壁層を有する強磁性自由層を含む。異方性マグネトレジスターs(AMR)は、約2-3%の磁気抵抗の比率R/Rを有する。巨大なマグネトレジスターは、10%のオーダーのより高い磁気抵抗の比率R/Rを提供するのが都合よい。磁気トンネル接合(MTJs)は、100%のオーダーのより高い磁気抵抗(mR)比率さえも提供する。
【0008】
[0019] チップ・スケールGMRまたはMTJセンサの他の効果は、それらの小さなサイズである。例えば、多層磁気抵抗センサ(GMRまたはMTJ)は、数10乃至100nmのオーダーの寸法を有することができる。このように、100〜150nm幅MTJの上に横たわる200ナノメートル幅の金属ラインは、32Amp/Oeの「磁界変換因子」を有し、ミクロン幅ラインは、159Amp/Oeの時間変換因子を有する。このように、適切に造られた多層磁気抵抗センサの自由層を切替えるかまたは飽和させることを必要とする磁界が、適度の電流を適度の電力消費を必要としている特定用途向け集積回路(ASIC)を使用しているこの種のセンサに印加することによって生じる。
【0009】
[0020] しかし、多層磁気抵抗センサの(1/fおよびバルクハウゼン・ノイズコンポーネントを含む)ノイズ力のスペクトル密度は、AMRセンサのそれより高い。低周波で発生している磁気変化に関して、1/fノイズが支配し、かくして、より高い磁気抵抗センサ比率多層磁気抵抗センサは、対応するより高い信号対雑音比に変換しない。この種のセンサの高い磁気抵抗比率を低い最小限の検出可能な磁界(mΔφ)またはノイズ均等磁界解像度に変換するために、信号対雑音(SN)比率を改善することが重要である。周波数プロット対1/fノイズのニーより上の周波数で、信号対雑音(SN)比率は、増加する。ノイズ(バルクハウゼン・ノイズ)の二次ソースは、閉ループ技術の活用法によって減少することができるかまたは本願明細書において記載されている技術を相殺することができる。
【0010】
[021] 多層磁気抵抗センサに関する信号対雑音比を改善するシステム及び方法の実施形態を本願明細書において記載する。本明細書で定義されるように、「平面の磁場の磁場コンポーネント」は平面(平面の軸)にわたっている基礎ベクトルの上の磁場の投影(projection)である。例えば、X−Y平面の磁場の磁場コンポーネントは、X軸およびY軸の上の磁場の投影(projection)である。本明細書で定義されるように、「X−Y平面の印加磁場」はX−Y平面に映される印加磁場である。用語「X−Y平面」、「平面磁場」および「選択された平面」が、交換可能に本願明細書において、使われる。磁場の平面方向の磁場コンポーネントは、選択された平面の磁場の方位および大きさを提供する。具体的には、磁場のX-コンポーネントおよびY-投影(projection)は、選択された平面の磁場の方位を表す情報および大きさを提供する。本願明細書において、記載されているセンサシステムは、磁気トンネル接合のユニークな特性および/または高解像度を有するローコストおよび低い電力消費を可能にする巨大な磁気抵抗器を利用する。本願明細書において使用する用語多層磁気抵抗(MR)センサは、AMRセンサより大きい磁気抵抗比率を有する磁気トンネル接合センサと巨大な磁気抵抗器センサとの両方に印加する。
【0011】
[022] 平面方向の印加磁場の方位および大きさが単一のトンネル接合を使用して測定されるという点で、本願明細書において記載されている磁気抵抗センサシステムは従来技術と異なり、それはウェーハ上の全てのトンネル接合のための直角PL/RL磁化方向の同じアニーリング・イン(annealing-in)を使用しているウェーハに製造されることができる。このように、従来技術でなされているように、本願明細書において記載されているトンネル接合はピンで留められた(pinned)層/リファレンス層磁化の直角方向をつくる必要はない。本明細書で定義されるように、「印加磁場」は磁気抵抗センサシステムに外部のソースからの磁気抵抗センサ上の(適用される)入射である磁場である。本願明細書において、記載されている磁気抵抗センサシステムでは、周期的に回動磁気ドライブ磁場は、磁気抵抗センサの自由層で発生する。磁気抵抗センサの人造反強磁性物質が一般に影響を受けないために、周期的に回動磁気ドライブ磁場は自由層を飽和させるのに十分大きいが、十分に少ない。このように、自由層は回動磁気ドライブ磁場の期間によって、回転する。
【0012】
[023] 追加的な外部のDC(または低周波)磁場がある場合には、磁気抵抗センサのセンサ出力は、位相に敏感な検出技術を使用して検出される2次高調波部品を開発する。2次高調波コンポーネントの振幅および位相角は大きさの機能および、それぞれ、外部の磁場の方向づけであり、このように平面方向の磁場の両方のコンポーネントの判定を考慮に入れる。検出回路は、センサ・チップの外部であってよく、または相補型金属酸化物半導体(CMOS)を使用することは処理するMTJを有するシリコンに統合されることができる。
【0013】
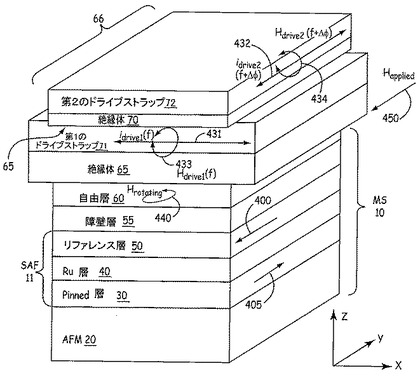
[024] 図1Aは、本発明の多層磁気抵抗(MR)センサ10、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。少なくとも、第1のドライブ・ストラップ71(また、本願明細書において、第1のストラップ71と称される)の一部分65は、第1のドライブ電流を担持するために磁気抵抗センサ(MS)10の上に横たわる。第1のドライブ・ストラップ71は、第一の方向に伸びている大きさを有する。図1Aに示すように、第1の方向は、X軸と平行である。少なくとも、第2のドライブ・ストラップ72(また、本願明細書において、第2のストラップ72と称される)の一部分66は、第2の交流ドライブ電流を担持するために磁気抵抗センサ10および第1のドライブ・ストラップ71の部分65の上に横たわる。第2のドライブ・ストラップ72は、第2の方向に伸びている大きさを有し、第2の方向が第1の方向に対して垂直である。図1Aに示すように、第2の方向は、Y軸と平行である。このように、第2のストラップ72は、第1のストラップ71の上に横たわり、第1のストラップ71に対して垂直である。磁気抵抗センサ10が磁気抵抗センサ10のX−Y平面において、回転している周期的回動ドライブ磁場に従属するように、第2の交流ドライブ電流は第1の交流ドライブ電流に関して90度位相が異なる。この実施形態の1つの実装では、第1の方向および第2の方向は直角でなく(非平行である)、この場合、選択された平面の周期的回動ドライブ磁場を生成する量によって、第2の交流ドライブ電流は第1の交流ドライブ電流に関して位相が異なる。しかし、この非直角系は、追加的な計算を必要として、複雑さをシステムに加える。
【0014】
[025]多層MRセンサ10は、反強磁性物質(AFM)20、人造反強磁性物質(SAF)11、障壁層55、底部から上部まで積み重ねられる自由層60を含む。人造反強磁性物質11は、強磁性ピン固定された(pinned)層30、Ru層40および、底部から上部まで積み重ねられたリファレンス層50を含む。「障壁層55」は、また、本願明細書において、「バリア55」と称される。センサ10が磁気トンネル接合センサである場合、バリア55は酸化物絶縁体バリアである。センサ10がGMRセンサである場合、バリア55は伝導の非磁性メタル層である。
【0015】
[026] 適切に設計されたAFM/SAF構造のリファレンス層50のリファレンス層磁化400は「固定され(fixed)」、すなわち、(高水準、典型的には〜kOeまで)印加された磁場は、リファレンス層磁化400を著しく変えない。このように、リファレンス層50は、固い層と称される。図1Aに示される典型的な磁気抵抗センサ10では、リファレンス層50のリファレンス層磁化400は、Y軸と平行である。
【0016】
[027] リファレンス層50は、バリア55の直下で横たわり、バリア55はリファレンス層50を自由層60から分離する。その磁化が適度のドライブ磁場のアプリケーションを有する飽和に駆動されることが可能であるように、自由層は非常に柔らかい。Hrotatingしている周期的回動ドライブ磁場およびいかなる印加磁場Happlied450も、容易に自由層60の磁化を変える。このように、自由層60は柔らかい層と称される。
【0017】
[028] 自由層60の磁化率は、自由層60の全ての磁気相互作用の正味の合計の結果である。これは、トンネル接合から成る他の層から、磁場と同様に自由層の材料および形状異方性を含む。円形の側面を有する自由層は都合よく平面方向の形状異方性を除去し、この特許に取り入れられる考えは例えば、他の幾何学によって、四角またな矩形になる。材料、処理および幾何学的な選択の組合せについては非常に柔らかい自由層が得られる。この種の材料、処理および幾何学的な選択は、一般に当業者になじみがある。
【0018】
[029] 図1Aに示すように、第2の交流ドライブ電流idrive2(f+Δφ)が第2の磁気ドライブ磁場Hdrive2(f+Δφ)を生成すると共に、第1の交流ドライブ電流idrive1(f)は第1の磁気ドライブ磁場Hdrive1(f)を生成し、ここで、Δφは、π/2ラジアンである。第2の交流ドライブ電流idrive2(f+Δφ)がIy(f) = I2cos(ωt)として書かれると共に、第1の交流ドライブ電流idrive1(f)はIx(f) = I1sin(ωt)として書かれることができる。第1の磁気ドライブ磁場Hdrive1(f)および第2の磁気ドライブ磁場Hdrive2(f+Δφ)の効果および自由層磁化上の外部的に印加磁場Happlied450は、図4および5に関して後述する。外部的に印加磁場Happlied450は、磁気センサ10で測定される磁場である。用語「印加磁場」および「測定される磁場」が、交換可能に本願明細書において使われる。印加磁場Happlied450は、ドライブ周波数fより非常に少ない低周波で変化している弱いDC磁場または弱い磁場でありえる。
【0019】
[030] AFM 20は、概して合金(例えばNiMn、PtMn、IrMnまたはFeMn)でできている。交流バイアスは、ほぼ200℃乃至350℃の範囲の温度で2、3時間の間、kOeのオーダーで磁場のSAF/AFM 11/20をアニーリングすることによって束縛層30に作成される。これは、AFM 20の間の接点および束縛層30に斜線磁場をこのように提供している束縛層30でAFM 20の補償されていない回転の方向を設定する。束縛層30およびリファレンス層50間の強い反強磁性継手は、束縛層磁化405のそれの反対側にリファレンス層磁化400の方向を設定する。SAF 11の正味の磁化は、ほぼ0であるように変えられる。このように、いくつかのkOeのオーダーの高い印加磁場は、束縛層/リファレンス層対30/50の磁化を変えることを必要とする。
【0020】
[031] 磁気抵抗センサ10の抵抗Rは、式R(θ) = R0 + ΔR(1-cosθ)/2によればリファレンス層磁化400と自由層磁化の関数であり、θはリファレンス層磁化400と自由層磁化との間の角度である。2つの層の磁化が平行のときに、R0は磁気抵抗センサ10の抵抗である。このように、自由層を飽和させるのに十分大きい(また、本願明細書において、磁気ドライブ磁場HD440と称された)回動磁気ドライブ磁場Hrotating440だけがセンサ10に適用されるとき、この印加回転ドライブ磁場Hrotating440の影響の自由層磁化の回転は周期的な磁気抵抗を生じる。
【0021】
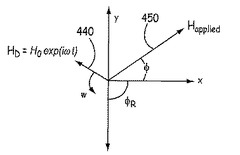
[032] 図1Bは、図1Aの磁気抵抗センサ10のX−Y平面の角周波数ωで、周期的に回転している磁気ドライブ磁場HD440を示す。本明細書で定義されるように「周期的に、ドライブ磁場を回転させている」角周波数で周期的に回転している磁気ドライブ磁場が、Hrotating = HD = H0eiωtとして示されるωであり、ここで、H0は、磁気ドライブ磁場HD440の大きさである。ベクトルH0の先端は、各々の回転を有するX−Y平面の円をたどる。全ての角度は、平面のX-Y座標系のX軸に関して測定される。リファレンス層磁化400は、X軸に関して角度φRである。図1Bに示すように、測定されるためにHappliedされる外部的に印加磁場は、X軸に関して角度φでX−Y平面にある。
【0022】
[033] 図2Aは、本発明の磁気トンネル接合14、電気的接点27および28、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。磁気トンネル接合(MTJ)14は図1Aに示すように磁気抵抗センサ10である。図1Aに示される障壁層55は、磁気トンネル接合14の酸化物障壁層56である。非磁性キャップ層61は、磁気トンネル接合14の自由層(FL)60の上に横たわる。電気的接触(ボトムリード)27は、シリコン(Si)基板25上の絶縁体26の上に横たわる。電気的接点27にかぶせている非磁性種子層22は、AFM層20の成長を促進するために用いる。電気的接触(トップリード)28は、キャップ層61の上に横たわる。絶縁体層73は電気的接点28を第1のドライブ・ストラップ71から分離し、それは絶縁体層70により適用されられる。少なくとも、一部の第2のドライブ・ストラップ72は、絶縁体層70および少なくとも一部の第1のドライブ・ストラップ71にかぶせる。電気的接点27および28は、磁気トンネル接合14の磁気抵抗R(θ)を測定するために磁気トンネル接合14を回路に接続するように構成される。図2Aに示すように、電流はボトムリード(電気的接点27)から、上部リード(電気的接点28)まで差し向けられる。図3Aは、本発明の図2Aの磁気トンネル接合14の出力電圧Voutを測定する回路90の一実施形態のブロック図である。
【0023】
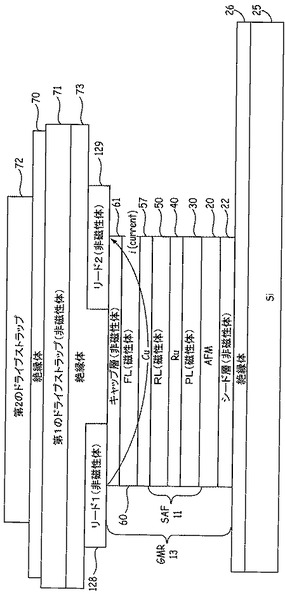
[034] 図2Bは、本発明の巨大な磁気抵抗器13、電気的接点128および129、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。GMR 13は、図1Aで示す多層磁気抵抗センサ10である。図1Aに示される障壁層55は、巨大な磁気抵抗器 13の非磁性導電層57(例えば銅の(Cu)層57)である。巨大な磁気抵抗器13は、通用している平面方向(current-in-plane 、CIP)モードにおいて、操作可能である。絶縁体26にかぶせている種子層22は、AFM層20の成長を促進するために用いる。非磁性キャップ層61は、巨大な磁気抵抗器13の自由層60にかぶせる。2つの電気的接点(リード1および2)128および129は、キャップ層60のエッジ部分の上に横たわる。電気的接点128および129は、絶縁体層73によって、各々から切り離される。絶縁体層73も電気的接点128および129を第1のドライブ・ストラップ71から分離し、それは絶縁体層70により適用されられる。第2のドライブ・ストラップ72は、絶縁体層70にかぶせる。
【0024】
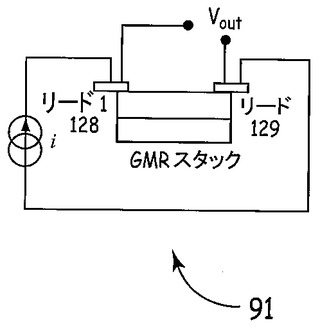
[035] 電気的接点128および129は、巨大なマグネトレジスター13の磁気抵抗を測定するために磁気抵抗センサ10を回路に接続するように構成される。図2Bに示すように、電流はリード1(電気的接点128)からリード2(電気的接点129)まで差し向けられる。図2Bは、本発明の図1Cの巨大なマグネトレジスター13の出力電圧Voutを測定する回路91の一実施形態のブロック図である。この実施形態の1つの実装では、巨大な磁気抵抗器13は、当業者に周知のように平らな(CPP)モードに垂直(current-perpendicular)に作動するように構成される。
【0025】
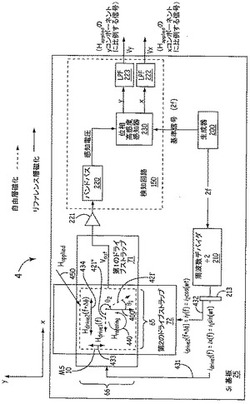
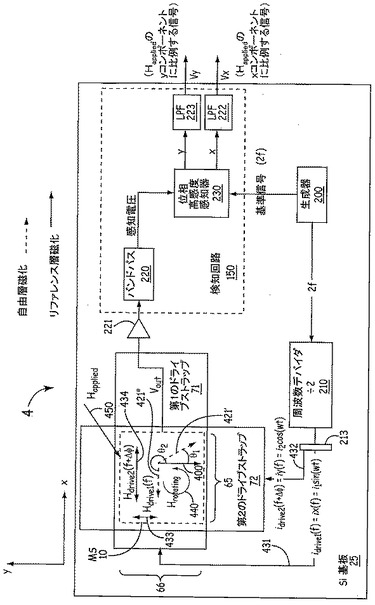
[036] 図4Aおよび4Bは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。図4Aに示される磁気抵抗センサシステム4は、磁気抵抗センサ10、アンプ221、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72、検出回路150、周波数生成器200、周波数デバイダ210、および位相を異にして相互にπ/2ラジアンである2つの正弦波ドライブ電流を起こす生成器213を含む。磁気抵抗センサ10は、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72を敷設している破線のボックスとして示される。磁気抵抗センサ10は、磁気トンネル接合か巨大な磁気抵抗器である。
【0026】
[037] 検出回路150は、バンドパスフィルタ220、位相高感度探知器230、第1のローパスフィルター222(LPF)、および、第2のローパスフィルタ(LPF)223を含む。周期的な出力電圧Voutは、検出回路150に対するアンプ221を介して磁気抵抗センサ10から出る出力である。バンドパスフィルタ220は、位相高感度探知器230に、センス電圧を出力する。位相高感度探知器230は、2次高調波コンポーネントまたは均等に、2次高調波のXおよびY-コンポーネントの振幅および位相を表す情報を出力する。このように、位相高感度探知器230は、2つの出力、すなわち、2次高調波のX-コンポーネントと比例したX-出力(Vx)、および、2次高調波のY-コンポーネントと比例したY-出力(Vy)を有する。X-出力は、印加フィールドのX-コンポーネントと比例したDC信号を出すHappliedした通過されたローパスフィルタ(LPF)222である。Y-出力は、印加フィールドのY-コンポーネントと比例したDC信号を出すHappliedした通過されたローパスフィルタ(LPF)223である。
【0027】
[038] 図1Aに示すように、磁気抵抗センサ10は、その間でスイッチで切り替え可能な磁化方位、ピンでとめられた磁化方位(リファレンス層磁化400)を有する強磁性リファレンス層50および障壁層55を有する強磁性自由層60を含む。磁気抵抗センサ10にかぶせている第1のドライブ・ストラップ71は、使用可能な状態で交流ドライブ電流idrive(f)を担持するように構成される。そして、それは周波数fと変換する。磁気抵抗センサ10にかぶせていて、直交して第1のドライブ・ストラップ71にかぶせている第2のドライブ・ストラップ72は使用可能な状態で交流ドライブ電流idrive2(f+Δφ)を担持するように構成され、それは周波数fと交替する。
【0028】
[039] 図4Aに示すように、周波数生成器200は周波数2fで交替している基準信号を生成し、周波数デバイダ210に信号を出力する。周波数生成器200も、位相高感度探知器230に、周波数2fで交替している信号を出力する。周波数デバイダ210は、半分の周波数2fで交替している信号を分ける。
【0029】
[040] 各々に関して同調的でないπ/2ラジアンであるそれぞれのドライブ・ストラップ71および72に、周波数デバイダ210の出力の生成器213は、2つのドライブ電流を印加する。具体的には、idrive1(f)に関して同調的でないπ/2ラジアンである第2のドライブ・ストラップ72に、生成器213は第1のドライブ・ストラップ71および第2のドライブ電流idrive2(f)に周波数fで第1の交流ドライブ電流idrive1(f)を出力する。当業者に理解されるように、相互に直角交流ドライブ電流を印加するために用いることができる他の技術が、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72で周波数fである。この実施形態の1つの実装では、非直角で非平行した第1および第2のストラップは、磁気抵抗センサにかぶせる。この場合、この文書を読んで即座に当業者に理解できるように、それぞれの第1および第2のストラップに適用される第1の交流ドライブ電流および第2の交流ドライブ電流は適切に位相分離された周期的な駆動信号によってドライブされる。
【0030】
[041] この実施形態の1つの実装では、生成器213は第2のドライブ・ストラップ72に、第2の交流ドライブ電流として、第1のドライブ・ストラップ71および信号iy(f) = i2cos(ωt)に第1の交流ドライブ電流として、同時に信号ix(f) =にi1sin(ωt)を供給する。いくつかの実施形態では、i1=i2である。磁気抵抗センサ10を(図3Aおよび3Bでそれぞれ示す回路90または91のような)回路に接続するリードは、磁気抵抗センサ10の磁場を見ることの容易さのため図4Aには示されない。
【0031】
[042] 第1のドライブ電流idrive1(f)(それは第1のドライブ・ストラップ71のラベルをつけられた二重矢431として図1Aに示される)は第1の磁気ドライブ磁場Hdrive1(f)を生成し、それはラベルをつけられる循環性ダブル矢433として図1Aに示される。第2のドライブ電流idrive2(f+Δφ)(それは第2のドライブ・ストラップ72の432とラベルをつけられる二重矢として、図1Aに示される)は第2の磁気ドライブ磁場Hdrive2(f+Δφ)を生成し、それは434とラベルをつけられる循環性のダブル矢として、図1Aに示される。第1の磁気ドライブ磁場Hdrive1(f)433および第2の磁気ドライブ磁場Hdrive2(f+Δφ)434は自由層60に達して、周期的回動ドライブ磁場Hrotatingを形成するために各々に重畳され、それは図1Aおよび4Aの440とラベルをつけられる円形の矢で示すように、X−Y平面において、回転している。「周期的に、ドライブ磁場440を回転させている」は、本願明細書においては「周期的に、磁気ドライブ磁場440を回転させている」とも称される。
【0032】
[043] 図1A、4Aおよび4B(周期的回転ドライブ磁場Hrotating440は負のZ方向に見るように反時計回りに回転する(CCW))に示すように自由層磁化は、自由層60の回動磁場と平行であるために周期的に回転する。この実施形態の1つの実装では、位相遅延Δφは、第2のドライブ・ストラップ72の代わりに、第1のドライブ・ストラップ71に印加される電流に加えられる。この場合、周期的回動ドライブ磁場Hrotating440は、負のZ方向に見るように時計回りに回転する(CW)。
【0033】
[044] 周期的回動ドライブ磁場Hrotating440は、MTJまたはGMRの高いΔR/Rを利用するために1/fノイズ力スペクトル密度カーブのニーを越えて、磁気抵抗センサ10の操作の位置を移す。このように、都合よく周期的回動ドライブ磁場Hrotating440によって、磁気抵抗センサシステム4が高い信号対雑音比または逆に、より低く最小限の検出可能な磁場(mΔφ)を成し遂げることができる。本明細書で定義されるように、磁気抵抗センサの操作の位置は、磁気抵抗センサ10が周期的回動ドライブ磁場Hrotating440によって、作動するようにさせられる磁気抵抗センサ10の確立密度関数対ノイズのその位置である。
【0034】
[045] 磁気抵抗センサ10(磁気トンネル接合14または巨大な磁気抵抗器13)は自由層の磁気誘導および抵抗間の伝達関数ブロックを提供し、その結果、電圧測定は検出回路150においてなされることができる。
【0035】
[046] 具体的には、第1のドライブ電流idrive1(f)431および第2のドライブ電流idrive2(f+Δφ)432(自由層60、しかし、十分に低くそれを飽和させるために十分に高い振幅については、リファレンス層50は、かなり影響を受けない)の範囲の中で、自由層磁化421は、磁気抵抗センサ10の周期的な抵抗変化を引き起こすために360の程度(2πラジアン)によって、周期的に回転する。図4Aの磁気センサ10の上面図に示すように、自由層磁化421’は第1の時間t1はリファレンス層磁化400および時間t2で自由層磁化421”から角度θ1であるリファレンス層磁化400からの角度θ2である。周期的なドライブ電流だけが磁気抵抗センサ10に印加され、DC(または低周波)磁場Happlied450がないとき、磁気抵抗センサ10の理想的な出力は周波数fの奇数の調和倍数だけを含む。
【0036】
[047] 一般に、自由層60(自由層磁化421)の磁化のダイナミックなものは、サイズ、縦横比および自由層60および磁気抵抗センサ10の他の材料特性(粒度、欠陥密度、4πMs)に依存する。より大きな磁気抵抗センサ10(寸法>〜1μm)に関して、飽和の1つの状態から飽和の対向する状態まで切り替えをする間の磁化の力学は、磁壁動力学(domain wall dynamics)を含む。切り替えをして仲介されるドメイン壁は、バルクハウゼン・ノイズのソースであるバルクハウゼン・ジャンプを一般的に含む。〜1μmより小さい寸法を有する磁気抵抗センサ10に関して、一般に、自由層60は飽和の1つの状態から核形成による飽和の対向する状態および磁気渦の普及まで切り替えをする。上記したサイズ依存は正確でなく、領域壁仲介された力学からボルテックス仲介された力学への移行はまた、センサから成る強磁性材料の他の材料パラメータの機能である。これらの力学も、磁化の状態のいかなる大きい変化にもあてはまって、飽和の1つの状態から飽和の他の状態まで切り替えをすることに限られていない。
【0037】
[048] 自由層60の磁化が周期的に回動磁気ドライブ磁場Hrotating440によって、筋道正しく回転するときに、バルクハウゼン・ノイズは減少する。このように、自由層磁化421の整合的な回転は、周期的回動磁気ドライブ磁場Hrotating440を維持することによって、確実にされる。周期的回動磁気ドライブ磁場Hrotating440の大きさは、経験的に磁気抵抗センサ10の出力波形の品質を調べることで測定される。磁気抵抗センサ10が小さいサイズを有するので、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72は、電流および力の適度の値で、周期的回動磁気ドライブ磁場Hrotating440を生じるように操作可能である。
【0038】
[049] 測定されたHapplied450である外部の磁場が磁気抵抗センサ10に適用されるとき、測定されたHapplied450である磁場は磁気抵抗センサ10のX−Y平面の周期的回動磁気ドライブ磁場Hrotating440に重畳される。この場合、自由層60の磁場は、周期的回動ドライブ磁場Hrotating440および外部的に印加磁場450の重ね合せに等しい。この重ね合せからの磁気抵抗センサ10の結果の出力は、偶数の調和コンポーネントを含む。最も低いオーダーの偶数の調和は、周波数2fで2次高調波コンポーネントである。
【0039】
[050] 検出回路150は、磁気抵抗センサ10の出力電圧Voutの2次高調波コンポーネントを抽出する。X−Y平面(図1Bに示される典型的なケースにおいて、Happlied)の測定されたHapplied450である磁場の大きさは、出力電圧Voutの抽出された2次高調波コンポーネントの振幅と比例している。X−Y平面の測定されたHapplied450である磁場の方位(図1Bに示される典型的なケースの角度φ)は、単に出力電圧Voutの抽出された2次高調波コンポーネントの位相角に関する。
【0040】
[051] 印加磁場とのこの数学的関係は、振幅をHapplied450し、および、2次高調波の位相角は現在引き出される。まず最初に、外部の磁場hがゼロ(例えばh= Happlied = 0)であると仮定する。回転ドライブ磁場HD(例えば、HD =Hrotating)は、センサの平面の周波数fで使用される。ドライブ磁場の振幅は、それがリファレンス層に影響を及ぼさないようなものである。また、自由層60のその異方性が十分に小さくてドライブ磁場十分に大きいHDであると仮定し、ドライブ磁場HDは、自由層磁化を飽和させ(4A図および4Bで421’および421”と示す)、すなわち自由層磁化が回転ドライブ磁場HDの瞬間的な方向において常に示される。
【0041】
[052] ドライブ磁場は、HD = H0exp(iωt)によって、与えられ、ここで、ω = 2πfである。上記した飽和の仮定については、磁気抵抗(MR)はまた、周波数fで正弦波である。次に、正弦波ドライブ磁場および外部の磁場hがある場合には、自由層磁化は、現在完全磁場ベクトルHD(w)+hの方向に指す。
複素数表記法を使用して、磁化が与えられる自由層の方向の単位ベクトルは、以下によって与えられる
[053]
【0042】
【数1】

【0043】
[054] リファレンス層磁化と平行な単位ベクトルkRは、以下によって与えられる
[055]
【0044】
【数2】
【0045】
[056] 自由層磁化と並列なの単位ベクトルは、kMである。自由層磁化(すなわち瞬間的な自由層磁化421’または421”)間の角度および磁化(すなわちリファレンス層磁化400)が与えられるリファレンス層は、以下によって与えられる
[057]
【0046】
【数3】
【0047】
[058] ここでk*Rは、kRの複素共役である。磁気抵抗の時間依存は、cosθの時間依存によって、与えられる。
[059]
【0048】
【数4】
【0049】
[060] ここで、u = h/H0である。uの線形パワーの上記の表現を増幅し、以下の式を得る
[061]
【0050】
【数5】
【0051】
[062] 力の線形近似の範囲内での(h/H0)、2次高調波の振幅は、2次高調波同等(φ +φR)の印加磁場hおよび位相と比例している。リファレンス層位相角φRが公知であるので、印加磁場の位相角を演繹できる。このように、提唱された作動モードで、2次高調波コンポーネントは、印加磁場の振幅および方向を提供する。
【0052】
[063] この分析は、自由層異方性Hkの効果を無視した。自由層のゼロ以外の異方性については、磁化方向は、磁場の瞬間的な方向と平行して指さない。しかし、ドライブ磁場(H0 ≫ Hk)の十分でかなりの振幅のために、異方性が修正項を由来される公式に加えることを思われる。本願明細書において、記載されている全体的な計画はうまくいく。
【0053】
[064] この振幅および位相は、当業者に周知のように直角コンポーネント(例えば、X-コンポーネントてY-コンポーネント)に変わることができる。Happlied(この種のHapplied< H0)の値の範囲のため、H0は周期的なドライブ磁場の振幅である。そして、Voutが比例している出力電圧の振幅がHappliedされる。
【0054】
[065] 角周波数ωで回転している周期的回転ドライブ磁場Hrotating440がセンサ(例えばX−Y平面)の平面において適用されるとき、自由層磁化は周期的回動ドライブ磁場Hrotating440の瞬間的な方向において指す。周期的回動ドライブ磁場Hrotating440の瞬間的な方向は、リファレンス層50に影響を及ぼさない。自由層60の異方性が十分に小さくて十分に大きい(すなわちH0>> Hk)ドライブ磁場であるので、ドライブ磁場は自由層磁化を飽和させる。
【0055】
[066] 1/fノイズ・カーブのニーを過ぎている周波数fで、磁気抵抗センサ10を駆動することによって、磁気抵抗センサ10の信号対雑音比は、ゼロ周波数の近くで動作の磁気抵抗センサの信号対雑音比より高い。f = ω/2πが1/fノイズ・カーブのニーより大きいために、ω=2πfの角周波数で周期的回動ドライブ磁場Hrotating440は決められる。
【0056】
[067] 周波数生成器200は、いかなる2次高調波コンポーネントのないスペクトルで純粋な駆動波形を出力する。第1のドライブ電流idrive1(f)431および/または第2に存在する偶数の調和コンポーネントがあり、ドライブ電流idrive2(f+Δφ)432、出力Voutは、印加磁場(すなわち無効なオフセット)さえない場合、偶数の調和コンポーネントを有する。純粋なスペクトル駆動波形が周波数生成器200によって生じない場合、検出回路の出力の無効なオフセットはユーザによって外で調整されることができる。
【0057】
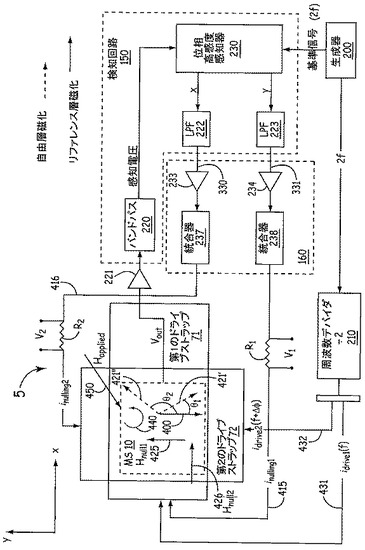
[068] 図4Bに示される磁気抵抗センサシステム5は、フィードバック回路160と同様に図4Aの磁気抵抗センサシステム4のコンポーネントを含む。この磁気抵抗センサシステム5において、第1のドライブ・ストラップ71および第2のドライブ・ストラップ721は、閉ループ・モードの磁気抵抗センサ10を作動するために用いる。
【0058】
[069]フィードバック回路160は、X-コンポーネントアンプ233、X-コンポーネントインテグレータ237、Y-コンポーネントアンプ234、およびY-コンポーネントインテグレータ238を含む。ローパスフィルタ222からの信号330としての出力である2次高調波の振幅のX-コンポーネントと比例したX-出力(Vx)。信号330は、X-コンポーネントアンプ233への入力である。X-コンポーネントアンプ233から出る出力は、インテグレータ237への入力である。同時に、2次高調波のY-コンポーネントと比例したY-出力(Vy)は、ローパスフィルタ223からの信号331としての出力である。信号331は、Y-コンポーネントアンプ234への入力である。Y-コンポーネントアンプ234から出る出力は、インテグレータ238への入力である。信号330は、Happlied450のX-コンポーネントと比例しており、信号331はHapplied450のY-コンポーネントと比例している。
【0059】
[070] フィードバック回路160は、検出回路150から入力信号330および331を抽出し、第1のドライブ・ストラップ71に対する第1のヌル電流Inulling1415を出力し、第2のドライブ・ストラップ72に、第2のヌル電流Inulling2416を出力する。第1のドライブ・ストラップ71および第2のドライブ・ストラップ72は、第1のヌル磁場Hnull1425を生成するために磁気抵抗センサ10にかぶせていて、ちょっと検出されている(Happlied)磁場450のYおよび、それぞれ、X-コンポーネントに対抗している磁場Hnull2426をゼロにしている。
【0060】
[071] 第1のヌル電流Inulling1415は、第1の安定直列抵抗R1全体の電圧低下V1を測定することで測定されることができる。直列抵抗R1全体の第1のヌル電流415または対応する電圧低下V1は、印加磁場Happlied450のY-コンポーネントと比例している。レジスタR1は、固定された温度安定レジスタである。
【0061】
[072] 第2のヌル電流Inulling2416は、第2の安定直列抵抗R2全体の電圧低下V2を測定することで測定されることができる。直列抵抗R2全体の第2のヌル電流Inulling2416または対応する電圧低下V2は、印加磁場Happlied450のX-コンポーネントと比例している。レジスタR2は、固定された温度安定レジスタである。
【0062】
[073] このように、それぞれ、2次高調波信号330および331のXおよびY-コンポーネントは増幅され、Xに抵抗するフィードバック電流(すなわち、第1のヌル電流Inulling1415および第2のヌル電流Inulling2416)および外部の印加磁場のY-コンポーネントがHapplied450を統合して使われる。すなわち、印加磁場Happlied450の目盛りおよび周期的回動ドライブ磁場Hrotating440のそれがかなり切り離される時、印加磁場Happlied450が低周波または近いDCの中であると仮定される。
【0063】
[074] このように、自由層60の磁化の唯一の偏位は、周期的回転磁気ドライブ磁場Hdrive(f)440によって、生じるそれらである。磁気抵抗センサ10が印加磁場の範囲を感知するにつれて、自由層60の磁化状態のDC変動がない、その理由は、X−Y平面のいかなる印加磁場Happlied450も第1のヌル磁場Hnull1425および第2のヌル磁場Hnull2426の重ね合せによってゼロにされるからである。磁気抵抗センサ10の信号対雑音比が更に改善されて、更に磁気抵抗センサ10の磁場ダイナミックレンジを増やすために、このフィードバックはバルクハウゼン・ノイズを減らす。
【0064】
[075] 図4Aおよび4Bに示すように、磁気抵抗センサ10は、X−Y平面の矩形の側面を有する。この実施形態の他の実装では、磁気抵抗センサは、X−Y平面の円形の側面を有する。
【0065】
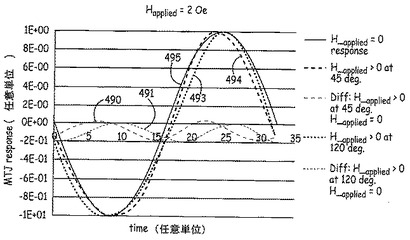
[076] 図5Aおよび5Bは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のための出力をシミュレーションを示す。図5Aおよび5Bの32timeのプロット線の期間で回転ドライブ磁場H0 = 10 Oeは、内在して、示されない。
【0066】
[077] 図5Aは、2 OeまでHapplied同等のシミュレーションされた出力を示す。Happlied = 0 Oeのとき、波形495はVoutのプロットである。位相角φ = 45度(図1B)でHapplied= 2 Oeのとき、波形494はVoutのプロットである。位相角φ= 120度(図1B)でHapplied= 2 Oeのとき、波形493はVoutのプロットである。異なる波形490は、波形494および波形495の間で違いをプロットする。異なる波形491は、波形493および波形495との間で違いをプロットする。異なる波形490および491は、偶数の高調波だけを含み、主要なフーリエコンポーネントが2次高調波である。
【0067】
[078] 図5Bは、4 Oeと等しいHappliedに関するシミュレーションされた出力を示す。Happlied = 0 Oeのとき、波形465はVoutのプロット線である。位相角φ= 45度(図1B)でHapplied= 4 Oeのとき、波形464はVoutのプロット線である。位相角φ= 120度(図1B)でHapplied= 4 Oeのとき、波形463はVoutのプロット線である。異なる波形460は、波形464および波形465の違いをプロットする。異なる波形461は、波形463および波形465の違いをプロットする。異なる波形460および461は偶数の高調波だけを含み、主要なフーリエコンポーネントが2次高調波である。このように、図5Aおよび5Bは、Happliedの位相角および振幅に基づいて出力された異なる波形の変化する方法を示す。
【0068】
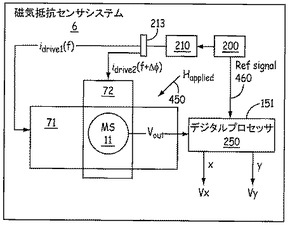
[079] 図6は、本発明の磁気抵抗センサ11を含んでいる磁気抵抗センサシステム6の実施形態のブロック図である。図6に示すように、磁気抵抗センサ11は、X−Y平面の円形の側面を有する。この実施形態の他の実施において、磁気抵抗センサは、形状において、矩形である。磁気抵抗センサシステム6の機能は、図4Aおよび4Bに関して上記した磁気抵抗センサシステム4および5の機能と同様である。磁気抵抗センサシステム6は、磁気抵抗センサ11、第1のドライブ・ストラップ71、第1のドライブ・ストラップ71および磁気抵抗センサ11にかぶせる第2のドライブ・ストラップ72を含む。磁気抵抗センサシステム6も、周波数生成器200および検出回路151を含む。検出回路151が、バンドパスフィルタ220、位相高感度探知器230および検出回路150のローパスフィルタ222ではなくデジタル・プロセッサ250を含むという点で、磁気抵抗センサシステム6の構造は4A図および4Bの磁気抵抗センサシステム4および5と異なる。
【0069】
[080] デジタル・プロセッサ250は、磁気抵抗センサ11から出力電圧Voutを受け取り、出力電圧Voutの2次高調波コンポーネントを抽出し、2つの信号、すなわち2次高調波の振幅のX-コンポーネントと比例したX-出力(Vx)および2次高調波のY-コンポーネントと比例したY-出力(Vy)を出力する。このように、デジタル・プロセッサ250の機能は、検出回路150(図4Aおよび4B)の機能と同様である。
【0070】
[081] 図7は、ドライブ電流の注文仕立ての形状の実施形態を示す。それぞれ、第1および第2のドライブ・ストラップ71および72に印加される第1および第2の交流ドライブ電流の形状に手をいれることによって、抽出された2次高調波コンポーネントの振幅は、当業者に周知のように増やされる。
【0071】
[082] 第1および第2の交流ドライブ電流の2つの典型的な集合651および652は、図7に示される。視聴の容易さのために、ドライブ電流701および702を交替させることの第1のセット651は、ドライブ電流751および752を交替させ、第2のセット652と相殺される。
【0072】
[083] 第1および第2の交流ドライブ電流の第1のセット651は、第1の交流ドライブ電流701(それは、時間とともに第1ののこぎりの歯形状および第2の交流ドライブ電流702を有し、それは時間とともに第2の鋸-歯形状を有する)を含む。第1の交流ドライブ電流701は、第2の交流ドライブ電流702に重畳されて示される。π/2(90度)位相シフトは、第1の交流ドライブ電流701のピークおよび第2の交流ドライブ電流702のピークの間で示される。典型的な第1の交流ドライブ電流701は、第1のストラップ71に印加される。典型的な第2の交流ドライブ電流702は、第2のストラップ71に印加される。
【0073】
[084] 第1および第2の交流ドライブ電流の第2のセット652は、第1の交流ドライブ電流751(それは、時間とともに第1ののこぎりの歯形状および第2の交流ドライブ電流752を有し、それは時間とともに正弦波形状を有する)を含む。第1の交流ドライブ電流751は、第2の交流ドライブ電流752に重畳されて示される。π/2(90度)位相シフトは、第1の交流ドライブ電流751のピークおよび第2の交流ドライブ電流752のピークの間で示される。典型的な第1の交流ドライブ電流751は、第1のストラップ71に印加される。典型的な第2の交流ドライブ電流752は、第2のストラップ71に印加される。よく理解されているように、これらは典型的な形状であり、時間対電流の他の形状が使うことができる。
【0074】
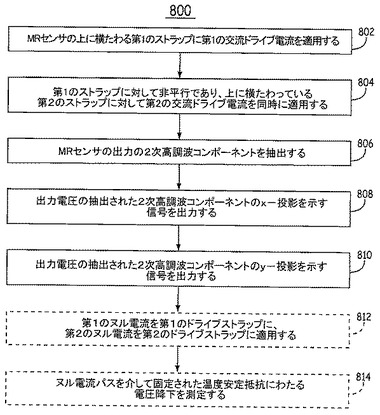
[085] 図8は、本発明の平面において、Happlied印加磁場を測定する方法800の一実施形態の工程系統図である。それぞれ、方法800は図4A、4Bおよび6に関して上記した磁気抵抗センサシステム4、5および6の実施形態に適用できる。
【0075】
[086] ブロック802で、第1の交流ドライブ電流idrive1(f)431は、磁気抵抗センサ(MS)10にかぶせている第1のストラップ71に適用される。第1の交流磁気ドライブ磁場Hdrive1(f) 433は、ドライブ電流idrive1(f)を交替させることによって、磁気抵抗センサ10において発生する。図4Aに示すように、第1の交流磁気ドライブ磁場Hdrive1(f) 433はY軸と平行して振動し、それが磁気抵抗センサ(MS)のX−Y平面にある。
【0076】
[087] 第1の交流ドライブ電流idrive1(f)431は、低いノイズ領域に磁気抵抗センサ10の操作の位置をシフトする。低いノイズ領域は、1/fノイズ・スペクトルのニーより上にある。この実施形態の1つの実装では、第1の交流ドライブ電流idrive1(f)431は、低いノイズ領域に磁気トンネル接合14の操作の位置をシフトするために磁気トンネル接合14(図2A)にかぶせている第1のドライブ・ストラップ71に適用される。この実施形態の他の実装では、第1の交流ドライブ電流idrive1(f) 431は、低いノイズ領域に巨大な磁気抵抗器13の操作の位置を移すために巨大な磁気抵抗器13(図2B)にかぶせている第1のドライブ・ストラップ71に適用される。
【0077】
[088] この実施形態の1つの実装では、交流ドライブ電流idrive1(f)431は、次のように第1のドライブ・ストラップ71に適用される:最初の周波数2fの信号は、周波数デバイダ210に対する周波数生成器200から出る出力であり、最初の周波数2fの信号は、周波数がドライブ周波数fで信号を生成するために半分において、分かれたということであり、そして、ドライブ周波数fの信号は、次に、生成器213で第1のドライブ・ストラップ71への入力を生成するために用いられる。第1の交流ドライブ電流idrive1(f)431は、ドライブ周波数fで交替している。ドライブ周波数fは、最初の周波数2fの半分である。
【0078】
[089] ブロック804で、第2の交流ドライブ電流idrive2(f+Δφ) 432が同時に第1のドライブ・ストラップ71に適用されている第1の交流ドライブ電流idrive1(f)によって、磁気抵抗センサ(MS)10にかぶせている第2のドライブ・ストラップ72に適用される。第2のドライブ・ストラップ72は、第1のドライブ・ストラップ71で、ある角度に(すなわち、非平行に)方位付けされる。この実施形態の1つの実装では、第1のドライブ・ストラップ71に対して第2のドライブ・ストラップ72は、垂直に方位付けされる。具体的には、第1のドライブ・ストラップ71は第一の方向に伸びている寸法を有し、第2のドライブ・ストラップ72は第2の方向(第1の方向に対して垂直な第2の方向)において伸びている寸法を有する。第1の交流ドライブ電流idrive1(f)431は第1の方向に流れるように適用され、その一方で、第2の交流ドライブ電流idrive2(f+Δφ)432は同時に第2の方向のに流れるように適用される。
【0079】
[090] 第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)は、ドライブ電流idrive2(f+Δφ)432を交替させることによって、磁気抵抗センサ10において発生する。
[091] 第2のドライブ・ストラップ72が第1のドライブ・ストラップ71に、0度および90度以外のいくらかの角度で方位付けされる場合、磁気抵抗センサ10または11の平面において、回転している周期的回動磁気ドライブ磁場に、生成するのに適切な様に、Δφはセットされる。第1のドライブ・ストラップ71に対して垂直な第2のドライブ・ストラップ72が方位付けされる場合、Δφはπ/2ラジアンに等しく設定される。図4Aに示すように、第2の交流磁気ドライブ磁場Hdrive2(f)はX軸と平行して振動し、それが磁気抵抗センサ(MS)のX−Y平面にある。
【0080】
[092] 第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に磁気抵抗センサ10の操作の位置をシフトする。この実施形態の1つの実装では、第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に磁気トンネル接合14の操作の位置を移すために磁気トンネル接合14(図2A)にかぶせている第2のドライブ・ストラップ72に適用される。この実施形態の他の実装では、第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に巨大な磁気抵抗器13の操作の位置を移すために巨大な磁気抵抗器13(図2B)にかぶせている第2のドライブ・ストラップ72に適用される。
【0081】
[093] 第2の交流ドライブ電流idrive2(f+Δφ)432は、次のように第2のドライブ・ストラップ72に適用される:最初の周波数2fの信号は、周波数デバイダ210に対する周波数生成器200から出る出力であり、最初の周波数2fの信号は、周波数がドライブ周波数fで信号を生成するために半分において分かれたということであり、そして、ドライブ周波数fの信号は、次に、生成器213で第1のドライブ・ストラップ71への入力を生成するために用いられる。具体的には、ドライブ周波数fで第2のドライブ・ストラップ72に適用される第2の信号は、位相が生成器213で第1のストラップ71に印加される電流から、Δφによって、遅延した(または進んだ)ということである。第2の交流ドライブ電流idrive2(f+Δφ)432は、ドライブ周波数fで交替している。
【0082】
[094] そのことは、(周期的に回転ドライブ磁場HD = H0eiωt)が数値的に440として分類した図1Bに示され、それは磁気抵抗センサ10のX−Y平面において回転し、第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)434(図1Aおよび4A)を有する第1の交流磁気ドライブ磁場Hdrive1(f)433(図1Aおよび4A)の重ね合せによって、生成する。具体的には、Y軸に沿って振動している第1の交流磁気ドライブ磁場Hdrive1(f)433およびX軸に沿って同時に振動している第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)434は周期的回動ドライブ磁場Hrotating440を生成し、それはZ軸周辺で逆時計回り方向において、回転するとして示される。
【0083】
[095] ブロック806で、磁気抵抗センサ10の出力の2次高調波コンポーネントは、磁気抵抗な(mR)センサ10から抽出される。磁気抵抗センサ10の自由層60のX−Y平面で回転する2次高調波コンポーネントは、測定されたHapplied450である磁場Hrotating440を周期的に回動磁気ドライブ磁場に重畳されるときに、発生するだけである。
【0084】
[096] この実施形態の1つの実装では、磁気抵抗センサ11(図6)の出力の2次高調波コンポーネントは、次のように抽出される:出力電圧Voutは、デジタル・プロセッサ250に対する磁気抵抗センサ11から出る出力であり、出力電圧は、デジタル・プロセッサ250で分解されるフーリエであり、最初の周波数の基準信号460は、周波数生成器200からのデジタル・プロセッサ250への入力であり、そして、最初の周波数(2f)のフーリエ分解する出力電圧の2次高調波コンポーネントは、抽出される。図6に示される磁気抵抗センサシステム6は、このように磁気抵抗センサ11の出力の2次高調波コンポーネントを抽出するように構成される。
【0085】
[097] この実施形態の他の実装では、磁気抵抗センサ10の出力の2次高調波コンポーネントは、次のように抽出される:磁気抵抗センサからの出力電圧は、バンドパスフィルタ220でフィルターをかけられ、バンドパスフィルタ220の出力(センス電圧)は、位相高感度探知器230への入力であり、最初の周波数2fの基準信号は、周波数生成器200からの位相高感度探知器230への入力であり、そして、フィルターを通した出力電圧の2次高調波コンポーネントは、位相高感度探知器230で抽出される。図4Aおよび4Bに示される磁気抵抗センサシステム4および5は、このように磁気抵抗センサ10の出力の2次高調波コンポーネントを抽出するように構成される。
【0086】
[098] ブロック808で、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)を表す信号は、検出回路から出る出力である。自由層60のX−Y平面の測定されたHapplied450である磁場のX-コンポーネントは、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)と比例している。
【0087】
[099] この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのX−投影(projection)は、図4Aおよび4Bで示す位相高感度探知器230から出る出力である。この実施形態の他の実装では、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)は、図6で示すデジタル・プロセッサ250から出る出力である。
【0088】
[0100] ブロック810で、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)を表す信号は、検出回路から出る出力である。自由層60のX−Y平面の測定されたHapplied450である磁場のY-コンポーネントは、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)と比例している。
【0089】
[0101] この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)は、図4Aおよび4Bで示す位相高感度探知器230から出る出力である。この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)を表す信号は、図6で示すデジタル・プロセッサ250から出る出力である。
【0090】
[0102] ブロック808および810の間の検出回路150から出る信号出力があることがありえると理解され:平面の第1の方向のための抽出された2次高調波コンポーネントの投影(projection)を表す情報を含む第1の信号と、平面の第2の方向のための抽出された2次高調波コンポーネントの投影(projection)を表す情報を含む第2の信号と、であってよく、第2の方向は第1の方向に対して直角であり、位相角情報は各々の方向の正しい投影(projection)を提供するために用いられる。
【0091】
[0103] ブロック812は、任意である。ブロック812で、第1のヌル電流Inulling1415は磁気抵抗センサ10の第1のヌル磁場Hnull1425を生成するために第1のドライブ・ストラップ71に適用され、第2のヌル電流Inulling2416は磁気抵抗センサ10(図4Bを参照)の第2のヌル磁場Hnull2426を生成するために第2のドライブ・ストラップ72に適用される。第1のヌル磁場Hnull1425が、測定される磁場Happlied450の第1のコンポーネント(例えばY-コンポーネント)と平行であり、且つ対向している。第2のヌル磁場Hnull2426が、測定される磁場Happlied450の第2のコンポーネント(例えばX-コンポーネント)と平行であり、且つ対向している。第1および第2のヌル磁場Hnull(1-2) 425および426は、一緒にバルクハウゼン・ノイズを減らして、センサのダイナミックレンジを増やす。
【0092】
[0104] この実施形態の1つの実装では、第1および第2のヌル電流415および416は、次のように磁気抵抗センサ10のそれぞれの第1および第2のヌル磁場425および426を生成するために第1および第2のそれぞれの第1のドライブ・ストラップ71および72に印加される:それぞれ、最初の周波数の2次高調波信号は、アンプ233および234によって、XおよびY-コンポーネントに映され、増幅された2次高調波信号330および331は、それぞれ抽出された2次高調波コンポーネントのコンポーネント(例えばXおよびY-コンポーネント)と比例している第2のヌル電流Inulling2416および第1のヌル電流Inulling1415を生成するために統合される。具体的には、第1のヌル電流Inulling1415は、第1のドライブ・ストラップ71に対するインテグレータ238からの入力であり、第2のヌル電流Inulling2416は、第2のドライブ・ストラップ72に対するインテグレータ237からの入力である。このように、測定されたHapplied450である磁場に対抗している第1および第2のヌル磁場425および426は、磁気抵抗センサ10において、発生する。ブロック812がインプリメントされる場合だけ、814ブロックは任意で、起こる。ブロック814、V2およびV1が固定して測定される電圧、温度安定レジスタR2およびR1で、それぞれの第2で第1のヌル電流がいずれに渡るか、それぞれのXおよび印加フィールドのY-コンポーネントを決定する。
【0093】
例示の実施形態
[0105] 実施形態1は、面(X−Y)に適用された磁場(450)を測定する方法であって、
第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、
第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、
測定される適用された磁場が、面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、
面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法を含む。
【0094】
[0106] 実施形態2は、出力電圧(Vout)の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号(330)を出力するステップと、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号(331)を出力するステップと、
を更に有することを特徴とする実施形態1に記載の方法を含む。
【0095】
[0107] 実施形態3は、
磁気抵抗センサからの出力電圧出力の2次高調波コンポーネントを抽出するステップが:
磁気抵抗センサからデジタル・プロセッサに出力電圧を出力するステップと、
デジタル・プロセッサで出力電圧をフーリエ分解するステップと、
周波数生成器からデジタル・プロセッサへの最初の周波数で基準信号を入力するステップと、
最初の周波数でフーリエ分解された出力電圧の2次高調波コンポーネントを抽出するステップと、
を含むことを特徴とする実施形態1-2のいずれかの方法を含む。
【0096】
[0108] 実施形態4は、
磁気抵抗センサから出る出力電圧の2次高調波コンポーネントを抽出するステップが、
バンドパスフィルタで磁気抵抗センサから出力電圧をフィルタリングするステップと、
バンドパスフィルタの出力を位相高感度探知器に入力するするステップと、
周波数生成器からの位相高感度探知器への最初の周波数で基準信号源を入力するステップと、
位相高感度探知器でフィルタリングされた出力電圧の2次高調波コンポーネントを抽出するステップと、
を有することを特徴とする実施形態1-3のいずれかの方法を含む。
【0097】
[0109] 実施形態5は更に、
磁気抵抗センサの第1のヌル磁場を生成するために第1のストラップに第1のヌル電流を適用するステップであって、第1のヌル磁場が、測定される適用された磁場の第1のコンポーネントに対して並行であり且つ対向することを特徴とする、ステップと、
磁気抵抗センサの第2のヌル磁場を生成するために第2のストラップに第2のヌル電流を適用するステップであって、第2のヌル磁場が、測定される適用された磁場の第2のコンポーネントに対して並行であり且つ対向することを特徴とするステップと、
を有することを特徴とする実施形態1-4のいずれかに記載の方法を含む。
【0098】
[0110] 実施形態6は更に、
周波数生成器から周波数デバイダへ最初の周波数で信号を出力するステップと、
ドライブ周波数(最初の周波数の半分であるドライブ周波数)で信号を生成するために最初の周波数で信号を周波数分解するステップと、
を有し、
第1の交流を第1のストラップに適用するステップが、
第1のストラップに第1の交流ドライブ周波数で信号を入力するステップからなり、
第1の交流ドライブ電流が、ドライブ周波数での交流であり、
第2の交流を第2のストラップに適用するステップが、
第2のストラップに第2の交流ドライブ周波数で信号を入力するステップからなり、
第2の交流ドライブ電流が、ドライブ周波数での交流であることを特徴とする、実施形態1-5のいずれかに記載の方法を含む。
【0099】
[0111] 実施形態7は更に、
第1のストラップに適用された第1の交流ドライブ電流の形状を仕立てるステップと、
第2のストラップに適用された第2の交流ドライブ電流の形状を仕立てるステップと、
を有することを特徴とする実施形態1-6のいずれかに記載の方法を含む。
【0100】
[0112] 実施形態8は、
磁気抵抗センサにかぶせている第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップが、
磁気トンネル接合の上に横たわる第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップ、または、
巨大な磁気抵抗センサの上に横たわる第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップ
のいずれか一方を含む実施形態1-7のいずれかに記載の方法を含む。
【0101】
[0113]実施形態9は、
平面において磁場の大きさおよび方位を測定するための磁気抵抗センサシステムを包含し、
上記磁気抵抗センサシステムは、
回転可能な磁化方位を有する強磁性自由層から成る磁気抵抗センサと、
ピンでとめられた磁化方位を有する強磁性リファレンス層と、
そららの間に障壁層と、
第1の交流ドライブ電流を担持するために磁気抵抗センサにかぶせている第1のストラップと、
第2の交流ドライブ電流を担持するために磁気抵抗センサにかぶせている第2のストラップであって、第2の交流ドライブ電流が、第1の交流ドライブ電流とは位相が異なることを特徴とする、第2のストラップと、
を有し、
第2のストラップは、第1のストラップの一部の上に横たわり、磁気抵抗センサは、平面において、回転している周期的回動ドライブ磁場に従属する、ことを特徴とする。
【0102】
[0114] 実施形態10は、
磁気抵抗センサから出力された電圧出力を受け取り、出力電圧の2次高調波コンポーネントを抽出する検出回路を更に有し、
測定される磁場の大きさは、出力電圧の抽出された2次高調波コンポーネントの振幅と比例し、測定される磁場の方位は、出力電圧の抽出された2次高調波コンポーネントの位相角に単に関係する、ことを特徴とする実施形態9の磁気抵抗センサシステムを含む。
【0103】
[0115] 実施形態11は、検出回路が、
磁気抵抗センサから出力されている出力電圧を入力としてとるバンドパスフィルタと;
センス電圧をバンドパスフィルタから入力としてとり、周波数生成器から基準信号を入力としてとる位相高感度探知器と、を有する、
ことを特徴とする、実施形態10の磁気抵抗センサシステムを含む。
【0104】
[0116] 実施形態12は、
第1のヌル電流を第1のストラップに提供し、第2のヌル電流を第2のストラップに提供するフィードバック回路を更に有することを特徴とする実施形態9-11のいずれかに記載の磁気抵抗センサシステムを含む。
【0105】
[0117] 実施形態13は、
検出回路が、
フーリエ分解された出力電圧の2次高調波コンポーネントを抽出し、出力電圧の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号と、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号とを出力するデジタル・プロセッサ
を含むことを特徴とする実施形態10-12のいずれかに記載の磁気抵抗センサシステムを含む。
【0106】
[0118] 実施形態14は、強磁性自由層と上に横たわるドライブ磁場ストラップとの間に位置する絶縁層を更に有する、実施形態9-13のいずれかに記載の磁気抵抗センサシステムを含む。
【0107】
[0119] 実施形態15は、
磁気抵抗センサが、巨大な磁気抵抗器であることを特徴とする、実施形態9-14のいずれかの磁気抵抗センサシステムを含む。
【0108】
[0120] 実施形態16は、
磁気抵抗センサが、磁気トンネル接合であることを特徴とする、実施形態9-15のいずれかの磁気抵抗センサシステムを含む。
【0109】
[0121] 実施形態17は、
第1のストラップに第1の交流ドライブ電流を供給し、第2のストラップに第2の交流ドライブ電流を供給する周波数生成器を更に有し、
磁気抵抗センサ、第1のストラップ、第2のストラップおよび周波数生成器が、シリコン基板に統合される、ことを特徴とする実施形態9-16のいずれかに記載の磁気抵抗センサシステムを含む。
【0110】
[0122] 実施形態18は、磁気抵抗センサ、第1のドライブ・ストラップ、および、第2のドライブ・ストラップはシリコン基板に統合されることを特徴とする、実施形態9-17のいずれかに記載の磁気抵抗センサシステムを含む。
【0111】
[0123] 実施形態19は、
第1のストラップが、第一の方向に伸びている寸法を有し、第2のストラップが、第2の方向(第1の方向に対して垂直な第2の方向)に伸びている寸法を有し、第2の交流ドライブ電流が、第1の交流ドライブ電流とは位相が90度異なることを特徴とする、実施形態9-18のいずれかに記載の磁気抵抗センサシステムを含む。
【0112】
[0124] 実施形態20は、磁場を検出するための磁気抵抗センサシステムを含み、
磁気抵抗センサシステムが:
スイッチで切り替え可能な磁化方位、ピンでとめられた磁化方位を有する強磁性リファレンス層、および、それらの間に障壁層を有する強磁性自由層を有する磁気抵抗センサと;
第1のストラップで第1の交流ドライブ電流を担持するための第1のドライブ・ストラップであって、第1のストラップの少なくとも一部が磁気抵抗センサの上に横たわり、第1のストラップが第一の方向に伸びる大きさを有することを特徴とする第1のドライブ・ストラップと、
ドライブ周波数で第2の交流ドライブ電流を担持するための第2のドライブ・ストラップであって、第2のストラップの少なくとも一部が第1のストラップの一部の上に横たわり、第2のストラップが第2の方向に伸びる大きさを有し、第2の方向が第1の方向とは平行でないことを特徴とする第2のドライブ・ストラップと、
第1のドライブ・ストラップに第1の交流ドライブ電流を供給し、第2のドライブ・ストラップに第2の交流ドライブ電流を供給する生成器と、
磁気抵抗センサからの出力電圧を入力し、第1および第2のドライブ交流ドライブ電流の周波数の2倍である最初の周波数で基準信号を入力し、出力電圧の2次高調波コンポーネントのX−投影(projection)を示す信号を出力し、
出力電圧の2次高調波コンポーネントのY−投影(projection)を示す信号を出力するように操作可能な検出回路と、
出力電圧の2次高調波コンポーネントのY−投影(projection)を表す信号を増幅する第1のアンプと、
出力電圧の2次高調波コンポーネントのY−投影(projection)を示す増幅された信号を統合し、第1のドライブ・ストラップに第1のヌル電流を出力する第1のインテグレータと、
第1のインテグレータの出力で第1の直列抵抗であって、第1の直列抵抗全体の電圧低下が、適用された磁場のY-コンポーネントに比例することを特徴とする、第1の直列抵抗と、
出力電圧の2次高調波コンポーネントのY−投影(projection)を表す信号を増幅する第2のアンプと、
出力電圧の2次高調波コンポーネントのX−投影(projection)を表す増幅された信号を統合し、第2のドライブ・ストラップに第2のヌル電流を出力する第2のインテグレータと、
第2のインテグレータの出力の第2の直列抵抗であって、第2の直列抵抗全体の電圧低下が、適用された磁場のX-コンポーネントに比例していることを特徴とする、第2の直列抵抗と、
を有することを特徴とする。
【0113】
[0125] 以下の請求項によって規定される本発明の多くの実施形態を記載してきた。それにもかかわらず、特許請求の範囲の発明の趣旨および範囲から逸脱することなく、記載されている実施形態に対するさまざまな変更態様がなされることができると理解される。従って、他の実施形態は以下の特許請求の範囲内にある。
【技術分野】
【0001】
[001] バッチを使用している平面フィールドの2つのコンポーネントが切断およびパッケージを必要とせずに同じ基板上の装置を組み立てたと感じることが可能なことは望ましい。現在利用できる技術は、隣接したトンネル接合上のアニーリング直交(annealing-in orthogonal)ピン固定された層(Pinned Layer)/リファレンス層(Reference Layer)(PL/RL)磁化方向によって、この課題を解決する。
【背景技術】
【0002】
[002] 磁気トンネル接合(MTJ)は、高い磁気抵抗比率を有する(すなわち(Rmax-Rmin)/Rmin =ΔR/R)の100の%のオーダーの、そして、磁場の高水準に適度に現在使用する。磁気トンネル接合も、高い1/fノイズを有する。低周波の高いノイズ密度は、kHzのオーダーより少ない周波数で磁場のレベルを測定しないためのMTJの使用を予防する。
【発明の概要】
【課題を解決するための手段】
【0003】
[003] 本発明は、平面(X−Y)に適用された磁場(450)を測定する方法である。第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、測定される適用された磁場が、平面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、平面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、平面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法。
【0004】
[004] 請求された発明のさまざまな実施形態の詳細は、添付の図面および下記の説明に記載される。他の特徴および効果は、説明、図面および請求項から明らかになる。
【図面の簡単な説明】
【0005】
【図1A】[005] 図1Aは、本発明の多層磁気抵抗センサ、第1のドライブ・ストラップ、および、第2のドライブ・ストラップの一実施形態のブロック図である、
【図1B】[006] 図1Bは、図1Aの磁気抵抗センサのX−Y平面の角周波数で、周期的に回転している磁気ドライブ磁場を示す、
【図2A】[007] 図2Aは、本発明の磁気トンネル接合(電気的接点)、第1のドライブ・ストラップ、および、第2のドライブ・ストラップの一実施形態のブロック図である。
【図2B】[008] 図2Bは、巨大な磁気抵抗器(電気的接点)、第1のドライブ・ストラップ、および、本発明の第2のドライブ・ストラップの一実施形態のブロック図である。
【図3A】[009] 図3Aは、本発明の図2Aの磁気トンネル接合の出力電圧を測定する回路の一実施形態のブロック図である、
【図3B】[010] 図3Bは、本発明の図2Bの巨大な磁気抵抗器の出力電圧を測定する回路の一実施形態のブロック図である、
【図4A】[011] 図4Aは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。
【図4B】図4Bは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。
【図5A】[012] 図5Aは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のためのシミュレーションされた出力を示す。
【図5B】図5Bは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のためのシミュレーションされた出力を示す。
【図6】[013] 図6は、本発明の磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である、
【図7】[014] 図7は、ドライブ電流のテーラーメード形状の実施形態を示す。
【図8】[015] 図8は、本発明の平面の印加磁場を測定する方法の一実施形態のフロー図である。
【発明を実施するための形態】
【0006】
[016] 種々の図面中の同じ参照番号および指示は、同じエレメントを表す。
[0017] 磁気抵抗(MR)センサが、磁場または地球の磁場の小さい変化の小さな値が検出されなければならないいかなる用途において、磁気コンパス、磁気異常検知、ギア-歯検知などに関して用いられる。フラックスゲートおよび超伝導クアンタムインターフェースデバイス(SQUIDs)は、磁場の測定小さな値または磁場の小さな変化を測定できるバルクレベル磁気センサである。
【0007】
[0018] チップ・スケール磁気抵抗センサは、ローコストで作られることができ、このように大きさレベル磁気抵抗センサに勝る利点である。異方性の磁気抵抗(AMR)センサ、GMRセンサおよびMTJセンサは、チップ・スケールで製造される。GMRおよびMTJスタックは、その間でスイッチで切り替え可能な磁化方位、固定する磁化方位を有する強磁性リファレンス層および障壁層を有する強磁性自由層を含む。異方性マグネトレジスターs(AMR)は、約2-3%の磁気抵抗の比率R/Rを有する。巨大なマグネトレジスターは、10%のオーダーのより高い磁気抵抗の比率R/Rを提供するのが都合よい。磁気トンネル接合(MTJs)は、100%のオーダーのより高い磁気抵抗(mR)比率さえも提供する。
【0008】
[0019] チップ・スケールGMRまたはMTJセンサの他の効果は、それらの小さなサイズである。例えば、多層磁気抵抗センサ(GMRまたはMTJ)は、数10乃至100nmのオーダーの寸法を有することができる。このように、100〜150nm幅MTJの上に横たわる200ナノメートル幅の金属ラインは、32Amp/Oeの「磁界変換因子」を有し、ミクロン幅ラインは、159Amp/Oeの時間変換因子を有する。このように、適切に造られた多層磁気抵抗センサの自由層を切替えるかまたは飽和させることを必要とする磁界が、適度の電流を適度の電力消費を必要としている特定用途向け集積回路(ASIC)を使用しているこの種のセンサに印加することによって生じる。
【0009】
[0020] しかし、多層磁気抵抗センサの(1/fおよびバルクハウゼン・ノイズコンポーネントを含む)ノイズ力のスペクトル密度は、AMRセンサのそれより高い。低周波で発生している磁気変化に関して、1/fノイズが支配し、かくして、より高い磁気抵抗センサ比率多層磁気抵抗センサは、対応するより高い信号対雑音比に変換しない。この種のセンサの高い磁気抵抗比率を低い最小限の検出可能な磁界(mΔφ)またはノイズ均等磁界解像度に変換するために、信号対雑音(SN)比率を改善することが重要である。周波数プロット対1/fノイズのニーより上の周波数で、信号対雑音(SN)比率は、増加する。ノイズ(バルクハウゼン・ノイズ)の二次ソースは、閉ループ技術の活用法によって減少することができるかまたは本願明細書において記載されている技術を相殺することができる。
【0010】
[021] 多層磁気抵抗センサに関する信号対雑音比を改善するシステム及び方法の実施形態を本願明細書において記載する。本明細書で定義されるように、「平面の磁場の磁場コンポーネント」は平面(平面の軸)にわたっている基礎ベクトルの上の磁場の投影(projection)である。例えば、X−Y平面の磁場の磁場コンポーネントは、X軸およびY軸の上の磁場の投影(projection)である。本明細書で定義されるように、「X−Y平面の印加磁場」はX−Y平面に映される印加磁場である。用語「X−Y平面」、「平面磁場」および「選択された平面」が、交換可能に本願明細書において、使われる。磁場の平面方向の磁場コンポーネントは、選択された平面の磁場の方位および大きさを提供する。具体的には、磁場のX-コンポーネントおよびY-投影(projection)は、選択された平面の磁場の方位を表す情報および大きさを提供する。本願明細書において、記載されているセンサシステムは、磁気トンネル接合のユニークな特性および/または高解像度を有するローコストおよび低い電力消費を可能にする巨大な磁気抵抗器を利用する。本願明細書において使用する用語多層磁気抵抗(MR)センサは、AMRセンサより大きい磁気抵抗比率を有する磁気トンネル接合センサと巨大な磁気抵抗器センサとの両方に印加する。
【0011】
[022] 平面方向の印加磁場の方位および大きさが単一のトンネル接合を使用して測定されるという点で、本願明細書において記載されている磁気抵抗センサシステムは従来技術と異なり、それはウェーハ上の全てのトンネル接合のための直角PL/RL磁化方向の同じアニーリング・イン(annealing-in)を使用しているウェーハに製造されることができる。このように、従来技術でなされているように、本願明細書において記載されているトンネル接合はピンで留められた(pinned)層/リファレンス層磁化の直角方向をつくる必要はない。本明細書で定義されるように、「印加磁場」は磁気抵抗センサシステムに外部のソースからの磁気抵抗センサ上の(適用される)入射である磁場である。本願明細書において、記載されている磁気抵抗センサシステムでは、周期的に回動磁気ドライブ磁場は、磁気抵抗センサの自由層で発生する。磁気抵抗センサの人造反強磁性物質が一般に影響を受けないために、周期的に回動磁気ドライブ磁場は自由層を飽和させるのに十分大きいが、十分に少ない。このように、自由層は回動磁気ドライブ磁場の期間によって、回転する。
【0012】
[023] 追加的な外部のDC(または低周波)磁場がある場合には、磁気抵抗センサのセンサ出力は、位相に敏感な検出技術を使用して検出される2次高調波部品を開発する。2次高調波コンポーネントの振幅および位相角は大きさの機能および、それぞれ、外部の磁場の方向づけであり、このように平面方向の磁場の両方のコンポーネントの判定を考慮に入れる。検出回路は、センサ・チップの外部であってよく、または相補型金属酸化物半導体(CMOS)を使用することは処理するMTJを有するシリコンに統合されることができる。
【0013】
[024] 図1Aは、本発明の多層磁気抵抗(MR)センサ10、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。少なくとも、第1のドライブ・ストラップ71(また、本願明細書において、第1のストラップ71と称される)の一部分65は、第1のドライブ電流を担持するために磁気抵抗センサ(MS)10の上に横たわる。第1のドライブ・ストラップ71は、第一の方向に伸びている大きさを有する。図1Aに示すように、第1の方向は、X軸と平行である。少なくとも、第2のドライブ・ストラップ72(また、本願明細書において、第2のストラップ72と称される)の一部分66は、第2の交流ドライブ電流を担持するために磁気抵抗センサ10および第1のドライブ・ストラップ71の部分65の上に横たわる。第2のドライブ・ストラップ72は、第2の方向に伸びている大きさを有し、第2の方向が第1の方向に対して垂直である。図1Aに示すように、第2の方向は、Y軸と平行である。このように、第2のストラップ72は、第1のストラップ71の上に横たわり、第1のストラップ71に対して垂直である。磁気抵抗センサ10が磁気抵抗センサ10のX−Y平面において、回転している周期的回動ドライブ磁場に従属するように、第2の交流ドライブ電流は第1の交流ドライブ電流に関して90度位相が異なる。この実施形態の1つの実装では、第1の方向および第2の方向は直角でなく(非平行である)、この場合、選択された平面の周期的回動ドライブ磁場を生成する量によって、第2の交流ドライブ電流は第1の交流ドライブ電流に関して位相が異なる。しかし、この非直角系は、追加的な計算を必要として、複雑さをシステムに加える。
【0014】
[025]多層MRセンサ10は、反強磁性物質(AFM)20、人造反強磁性物質(SAF)11、障壁層55、底部から上部まで積み重ねられる自由層60を含む。人造反強磁性物質11は、強磁性ピン固定された(pinned)層30、Ru層40および、底部から上部まで積み重ねられたリファレンス層50を含む。「障壁層55」は、また、本願明細書において、「バリア55」と称される。センサ10が磁気トンネル接合センサである場合、バリア55は酸化物絶縁体バリアである。センサ10がGMRセンサである場合、バリア55は伝導の非磁性メタル層である。
【0015】
[026] 適切に設計されたAFM/SAF構造のリファレンス層50のリファレンス層磁化400は「固定され(fixed)」、すなわち、(高水準、典型的には〜kOeまで)印加された磁場は、リファレンス層磁化400を著しく変えない。このように、リファレンス層50は、固い層と称される。図1Aに示される典型的な磁気抵抗センサ10では、リファレンス層50のリファレンス層磁化400は、Y軸と平行である。
【0016】
[027] リファレンス層50は、バリア55の直下で横たわり、バリア55はリファレンス層50を自由層60から分離する。その磁化が適度のドライブ磁場のアプリケーションを有する飽和に駆動されることが可能であるように、自由層は非常に柔らかい。Hrotatingしている周期的回動ドライブ磁場およびいかなる印加磁場Happlied450も、容易に自由層60の磁化を変える。このように、自由層60は柔らかい層と称される。
【0017】
[028] 自由層60の磁化率は、自由層60の全ての磁気相互作用の正味の合計の結果である。これは、トンネル接合から成る他の層から、磁場と同様に自由層の材料および形状異方性を含む。円形の側面を有する自由層は都合よく平面方向の形状異方性を除去し、この特許に取り入れられる考えは例えば、他の幾何学によって、四角またな矩形になる。材料、処理および幾何学的な選択の組合せについては非常に柔らかい自由層が得られる。この種の材料、処理および幾何学的な選択は、一般に当業者になじみがある。
【0018】
[029] 図1Aに示すように、第2の交流ドライブ電流idrive2(f+Δφ)が第2の磁気ドライブ磁場Hdrive2(f+Δφ)を生成すると共に、第1の交流ドライブ電流idrive1(f)は第1の磁気ドライブ磁場Hdrive1(f)を生成し、ここで、Δφは、π/2ラジアンである。第2の交流ドライブ電流idrive2(f+Δφ)がIy(f) = I2cos(ωt)として書かれると共に、第1の交流ドライブ電流idrive1(f)はIx(f) = I1sin(ωt)として書かれることができる。第1の磁気ドライブ磁場Hdrive1(f)および第2の磁気ドライブ磁場Hdrive2(f+Δφ)の効果および自由層磁化上の外部的に印加磁場Happlied450は、図4および5に関して後述する。外部的に印加磁場Happlied450は、磁気センサ10で測定される磁場である。用語「印加磁場」および「測定される磁場」が、交換可能に本願明細書において使われる。印加磁場Happlied450は、ドライブ周波数fより非常に少ない低周波で変化している弱いDC磁場または弱い磁場でありえる。
【0019】
[030] AFM 20は、概して合金(例えばNiMn、PtMn、IrMnまたはFeMn)でできている。交流バイアスは、ほぼ200℃乃至350℃の範囲の温度で2、3時間の間、kOeのオーダーで磁場のSAF/AFM 11/20をアニーリングすることによって束縛層30に作成される。これは、AFM 20の間の接点および束縛層30に斜線磁場をこのように提供している束縛層30でAFM 20の補償されていない回転の方向を設定する。束縛層30およびリファレンス層50間の強い反強磁性継手は、束縛層磁化405のそれの反対側にリファレンス層磁化400の方向を設定する。SAF 11の正味の磁化は、ほぼ0であるように変えられる。このように、いくつかのkOeのオーダーの高い印加磁場は、束縛層/リファレンス層対30/50の磁化を変えることを必要とする。
【0020】
[031] 磁気抵抗センサ10の抵抗Rは、式R(θ) = R0 + ΔR(1-cosθ)/2によればリファレンス層磁化400と自由層磁化の関数であり、θはリファレンス層磁化400と自由層磁化との間の角度である。2つの層の磁化が平行のときに、R0は磁気抵抗センサ10の抵抗である。このように、自由層を飽和させるのに十分大きい(また、本願明細書において、磁気ドライブ磁場HD440と称された)回動磁気ドライブ磁場Hrotating440だけがセンサ10に適用されるとき、この印加回転ドライブ磁場Hrotating440の影響の自由層磁化の回転は周期的な磁気抵抗を生じる。
【0021】
[032] 図1Bは、図1Aの磁気抵抗センサ10のX−Y平面の角周波数ωで、周期的に回転している磁気ドライブ磁場HD440を示す。本明細書で定義されるように「周期的に、ドライブ磁場を回転させている」角周波数で周期的に回転している磁気ドライブ磁場が、Hrotating = HD = H0eiωtとして示されるωであり、ここで、H0は、磁気ドライブ磁場HD440の大きさである。ベクトルH0の先端は、各々の回転を有するX−Y平面の円をたどる。全ての角度は、平面のX-Y座標系のX軸に関して測定される。リファレンス層磁化400は、X軸に関して角度φRである。図1Bに示すように、測定されるためにHappliedされる外部的に印加磁場は、X軸に関して角度φでX−Y平面にある。
【0022】
[033] 図2Aは、本発明の磁気トンネル接合14、電気的接点27および28、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。磁気トンネル接合(MTJ)14は図1Aに示すように磁気抵抗センサ10である。図1Aに示される障壁層55は、磁気トンネル接合14の酸化物障壁層56である。非磁性キャップ層61は、磁気トンネル接合14の自由層(FL)60の上に横たわる。電気的接触(ボトムリード)27は、シリコン(Si)基板25上の絶縁体26の上に横たわる。電気的接点27にかぶせている非磁性種子層22は、AFM層20の成長を促進するために用いる。電気的接触(トップリード)28は、キャップ層61の上に横たわる。絶縁体層73は電気的接点28を第1のドライブ・ストラップ71から分離し、それは絶縁体層70により適用されられる。少なくとも、一部の第2のドライブ・ストラップ72は、絶縁体層70および少なくとも一部の第1のドライブ・ストラップ71にかぶせる。電気的接点27および28は、磁気トンネル接合14の磁気抵抗R(θ)を測定するために磁気トンネル接合14を回路に接続するように構成される。図2Aに示すように、電流はボトムリード(電気的接点27)から、上部リード(電気的接点28)まで差し向けられる。図3Aは、本発明の図2Aの磁気トンネル接合14の出力電圧Voutを測定する回路90の一実施形態のブロック図である。
【0023】
[034] 図2Bは、本発明の巨大な磁気抵抗器13、電気的接点128および129、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72の一実施形態のブロック図である。GMR 13は、図1Aで示す多層磁気抵抗センサ10である。図1Aに示される障壁層55は、巨大な磁気抵抗器 13の非磁性導電層57(例えば銅の(Cu)層57)である。巨大な磁気抵抗器13は、通用している平面方向(current-in-plane 、CIP)モードにおいて、操作可能である。絶縁体26にかぶせている種子層22は、AFM層20の成長を促進するために用いる。非磁性キャップ層61は、巨大な磁気抵抗器13の自由層60にかぶせる。2つの電気的接点(リード1および2)128および129は、キャップ層60のエッジ部分の上に横たわる。電気的接点128および129は、絶縁体層73によって、各々から切り離される。絶縁体層73も電気的接点128および129を第1のドライブ・ストラップ71から分離し、それは絶縁体層70により適用されられる。第2のドライブ・ストラップ72は、絶縁体層70にかぶせる。
【0024】
[035] 電気的接点128および129は、巨大なマグネトレジスター13の磁気抵抗を測定するために磁気抵抗センサ10を回路に接続するように構成される。図2Bに示すように、電流はリード1(電気的接点128)からリード2(電気的接点129)まで差し向けられる。図2Bは、本発明の図1Cの巨大なマグネトレジスター13の出力電圧Voutを測定する回路91の一実施形態のブロック図である。この実施形態の1つの実装では、巨大な磁気抵抗器13は、当業者に周知のように平らな(CPP)モードに垂直(current-perpendicular)に作動するように構成される。
【0025】
[036] 図4Aおよび4Bは、本発明の図1Aの磁気抵抗センサを含んでいる磁気抵抗センサシステムの実施形態のブロック図である。図4Aに示される磁気抵抗センサシステム4は、磁気抵抗センサ10、アンプ221、第1のドライブ・ストラップ71、第2のドライブ・ストラップ72、検出回路150、周波数生成器200、周波数デバイダ210、および位相を異にして相互にπ/2ラジアンである2つの正弦波ドライブ電流を起こす生成器213を含む。磁気抵抗センサ10は、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72を敷設している破線のボックスとして示される。磁気抵抗センサ10は、磁気トンネル接合か巨大な磁気抵抗器である。
【0026】
[037] 検出回路150は、バンドパスフィルタ220、位相高感度探知器230、第1のローパスフィルター222(LPF)、および、第2のローパスフィルタ(LPF)223を含む。周期的な出力電圧Voutは、検出回路150に対するアンプ221を介して磁気抵抗センサ10から出る出力である。バンドパスフィルタ220は、位相高感度探知器230に、センス電圧を出力する。位相高感度探知器230は、2次高調波コンポーネントまたは均等に、2次高調波のXおよびY-コンポーネントの振幅および位相を表す情報を出力する。このように、位相高感度探知器230は、2つの出力、すなわち、2次高調波のX-コンポーネントと比例したX-出力(Vx)、および、2次高調波のY-コンポーネントと比例したY-出力(Vy)を有する。X-出力は、印加フィールドのX-コンポーネントと比例したDC信号を出すHappliedした通過されたローパスフィルタ(LPF)222である。Y-出力は、印加フィールドのY-コンポーネントと比例したDC信号を出すHappliedした通過されたローパスフィルタ(LPF)223である。
【0027】
[038] 図1Aに示すように、磁気抵抗センサ10は、その間でスイッチで切り替え可能な磁化方位、ピンでとめられた磁化方位(リファレンス層磁化400)を有する強磁性リファレンス層50および障壁層55を有する強磁性自由層60を含む。磁気抵抗センサ10にかぶせている第1のドライブ・ストラップ71は、使用可能な状態で交流ドライブ電流idrive(f)を担持するように構成される。そして、それは周波数fと変換する。磁気抵抗センサ10にかぶせていて、直交して第1のドライブ・ストラップ71にかぶせている第2のドライブ・ストラップ72は使用可能な状態で交流ドライブ電流idrive2(f+Δφ)を担持するように構成され、それは周波数fと交替する。
【0028】
[039] 図4Aに示すように、周波数生成器200は周波数2fで交替している基準信号を生成し、周波数デバイダ210に信号を出力する。周波数生成器200も、位相高感度探知器230に、周波数2fで交替している信号を出力する。周波数デバイダ210は、半分の周波数2fで交替している信号を分ける。
【0029】
[040] 各々に関して同調的でないπ/2ラジアンであるそれぞれのドライブ・ストラップ71および72に、周波数デバイダ210の出力の生成器213は、2つのドライブ電流を印加する。具体的には、idrive1(f)に関して同調的でないπ/2ラジアンである第2のドライブ・ストラップ72に、生成器213は第1のドライブ・ストラップ71および第2のドライブ電流idrive2(f)に周波数fで第1の交流ドライブ電流idrive1(f)を出力する。当業者に理解されるように、相互に直角交流ドライブ電流を印加するために用いることができる他の技術が、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72で周波数fである。この実施形態の1つの実装では、非直角で非平行した第1および第2のストラップは、磁気抵抗センサにかぶせる。この場合、この文書を読んで即座に当業者に理解できるように、それぞれの第1および第2のストラップに適用される第1の交流ドライブ電流および第2の交流ドライブ電流は適切に位相分離された周期的な駆動信号によってドライブされる。
【0030】
[041] この実施形態の1つの実装では、生成器213は第2のドライブ・ストラップ72に、第2の交流ドライブ電流として、第1のドライブ・ストラップ71および信号iy(f) = i2cos(ωt)に第1の交流ドライブ電流として、同時に信号ix(f) =にi1sin(ωt)を供給する。いくつかの実施形態では、i1=i2である。磁気抵抗センサ10を(図3Aおよび3Bでそれぞれ示す回路90または91のような)回路に接続するリードは、磁気抵抗センサ10の磁場を見ることの容易さのため図4Aには示されない。
【0031】
[042] 第1のドライブ電流idrive1(f)(それは第1のドライブ・ストラップ71のラベルをつけられた二重矢431として図1Aに示される)は第1の磁気ドライブ磁場Hdrive1(f)を生成し、それはラベルをつけられる循環性ダブル矢433として図1Aに示される。第2のドライブ電流idrive2(f+Δφ)(それは第2のドライブ・ストラップ72の432とラベルをつけられる二重矢として、図1Aに示される)は第2の磁気ドライブ磁場Hdrive2(f+Δφ)を生成し、それは434とラベルをつけられる循環性のダブル矢として、図1Aに示される。第1の磁気ドライブ磁場Hdrive1(f)433および第2の磁気ドライブ磁場Hdrive2(f+Δφ)434は自由層60に達して、周期的回動ドライブ磁場Hrotatingを形成するために各々に重畳され、それは図1Aおよび4Aの440とラベルをつけられる円形の矢で示すように、X−Y平面において、回転している。「周期的に、ドライブ磁場440を回転させている」は、本願明細書においては「周期的に、磁気ドライブ磁場440を回転させている」とも称される。
【0032】
[043] 図1A、4Aおよび4B(周期的回転ドライブ磁場Hrotating440は負のZ方向に見るように反時計回りに回転する(CCW))に示すように自由層磁化は、自由層60の回動磁場と平行であるために周期的に回転する。この実施形態の1つの実装では、位相遅延Δφは、第2のドライブ・ストラップ72の代わりに、第1のドライブ・ストラップ71に印加される電流に加えられる。この場合、周期的回動ドライブ磁場Hrotating440は、負のZ方向に見るように時計回りに回転する(CW)。
【0033】
[044] 周期的回動ドライブ磁場Hrotating440は、MTJまたはGMRの高いΔR/Rを利用するために1/fノイズ力スペクトル密度カーブのニーを越えて、磁気抵抗センサ10の操作の位置を移す。このように、都合よく周期的回動ドライブ磁場Hrotating440によって、磁気抵抗センサシステム4が高い信号対雑音比または逆に、より低く最小限の検出可能な磁場(mΔφ)を成し遂げることができる。本明細書で定義されるように、磁気抵抗センサの操作の位置は、磁気抵抗センサ10が周期的回動ドライブ磁場Hrotating440によって、作動するようにさせられる磁気抵抗センサ10の確立密度関数対ノイズのその位置である。
【0034】
[045] 磁気抵抗センサ10(磁気トンネル接合14または巨大な磁気抵抗器13)は自由層の磁気誘導および抵抗間の伝達関数ブロックを提供し、その結果、電圧測定は検出回路150においてなされることができる。
【0035】
[046] 具体的には、第1のドライブ電流idrive1(f)431および第2のドライブ電流idrive2(f+Δφ)432(自由層60、しかし、十分に低くそれを飽和させるために十分に高い振幅については、リファレンス層50は、かなり影響を受けない)の範囲の中で、自由層磁化421は、磁気抵抗センサ10の周期的な抵抗変化を引き起こすために360の程度(2πラジアン)によって、周期的に回転する。図4Aの磁気センサ10の上面図に示すように、自由層磁化421’は第1の時間t1はリファレンス層磁化400および時間t2で自由層磁化421”から角度θ1であるリファレンス層磁化400からの角度θ2である。周期的なドライブ電流だけが磁気抵抗センサ10に印加され、DC(または低周波)磁場Happlied450がないとき、磁気抵抗センサ10の理想的な出力は周波数fの奇数の調和倍数だけを含む。
【0036】
[047] 一般に、自由層60(自由層磁化421)の磁化のダイナミックなものは、サイズ、縦横比および自由層60および磁気抵抗センサ10の他の材料特性(粒度、欠陥密度、4πMs)に依存する。より大きな磁気抵抗センサ10(寸法>〜1μm)に関して、飽和の1つの状態から飽和の対向する状態まで切り替えをする間の磁化の力学は、磁壁動力学(domain wall dynamics)を含む。切り替えをして仲介されるドメイン壁は、バルクハウゼン・ノイズのソースであるバルクハウゼン・ジャンプを一般的に含む。〜1μmより小さい寸法を有する磁気抵抗センサ10に関して、一般に、自由層60は飽和の1つの状態から核形成による飽和の対向する状態および磁気渦の普及まで切り替えをする。上記したサイズ依存は正確でなく、領域壁仲介された力学からボルテックス仲介された力学への移行はまた、センサから成る強磁性材料の他の材料パラメータの機能である。これらの力学も、磁化の状態のいかなる大きい変化にもあてはまって、飽和の1つの状態から飽和の他の状態まで切り替えをすることに限られていない。
【0037】
[048] 自由層60の磁化が周期的に回動磁気ドライブ磁場Hrotating440によって、筋道正しく回転するときに、バルクハウゼン・ノイズは減少する。このように、自由層磁化421の整合的な回転は、周期的回動磁気ドライブ磁場Hrotating440を維持することによって、確実にされる。周期的回動磁気ドライブ磁場Hrotating440の大きさは、経験的に磁気抵抗センサ10の出力波形の品質を調べることで測定される。磁気抵抗センサ10が小さいサイズを有するので、第1のドライブ・ストラップ71および第2のドライブ・ストラップ72は、電流および力の適度の値で、周期的回動磁気ドライブ磁場Hrotating440を生じるように操作可能である。
【0038】
[049] 測定されたHapplied450である外部の磁場が磁気抵抗センサ10に適用されるとき、測定されたHapplied450である磁場は磁気抵抗センサ10のX−Y平面の周期的回動磁気ドライブ磁場Hrotating440に重畳される。この場合、自由層60の磁場は、周期的回動ドライブ磁場Hrotating440および外部的に印加磁場450の重ね合せに等しい。この重ね合せからの磁気抵抗センサ10の結果の出力は、偶数の調和コンポーネントを含む。最も低いオーダーの偶数の調和は、周波数2fで2次高調波コンポーネントである。
【0039】
[050] 検出回路150は、磁気抵抗センサ10の出力電圧Voutの2次高調波コンポーネントを抽出する。X−Y平面(図1Bに示される典型的なケースにおいて、Happlied)の測定されたHapplied450である磁場の大きさは、出力電圧Voutの抽出された2次高調波コンポーネントの振幅と比例している。X−Y平面の測定されたHapplied450である磁場の方位(図1Bに示される典型的なケースの角度φ)は、単に出力電圧Voutの抽出された2次高調波コンポーネントの位相角に関する。
【0040】
[051] 印加磁場とのこの数学的関係は、振幅をHapplied450し、および、2次高調波の位相角は現在引き出される。まず最初に、外部の磁場hがゼロ(例えばh= Happlied = 0)であると仮定する。回転ドライブ磁場HD(例えば、HD =Hrotating)は、センサの平面の周波数fで使用される。ドライブ磁場の振幅は、それがリファレンス層に影響を及ぼさないようなものである。また、自由層60のその異方性が十分に小さくてドライブ磁場十分に大きいHDであると仮定し、ドライブ磁場HDは、自由層磁化を飽和させ(4A図および4Bで421’および421”と示す)、すなわち自由層磁化が回転ドライブ磁場HDの瞬間的な方向において常に示される。
【0041】
[052] ドライブ磁場は、HD = H0exp(iωt)によって、与えられ、ここで、ω = 2πfである。上記した飽和の仮定については、磁気抵抗(MR)はまた、周波数fで正弦波である。次に、正弦波ドライブ磁場および外部の磁場hがある場合には、自由層磁化は、現在完全磁場ベクトルHD(w)+hの方向に指す。
複素数表記法を使用して、磁化が与えられる自由層の方向の単位ベクトルは、以下によって与えられる
[053]
【0042】
【数1】
【0043】
[054] リファレンス層磁化と平行な単位ベクトルkRは、以下によって与えられる
[055]
【0044】
【数2】
【0045】
[056] 自由層磁化と並列なの単位ベクトルは、kMである。自由層磁化(すなわち瞬間的な自由層磁化421’または421”)間の角度および磁化(すなわちリファレンス層磁化400)が与えられるリファレンス層は、以下によって与えられる
[057]
【0046】
【数3】
【0047】
[058] ここでk*Rは、kRの複素共役である。磁気抵抗の時間依存は、cosθの時間依存によって、与えられる。
[059]
【0048】
【数4】
【0049】
[060] ここで、u = h/H0である。uの線形パワーの上記の表現を増幅し、以下の式を得る
[061]
【0050】
【数5】
【0051】
[062] 力の線形近似の範囲内での(h/H0)、2次高調波の振幅は、2次高調波同等(φ +φR)の印加磁場hおよび位相と比例している。リファレンス層位相角φRが公知であるので、印加磁場の位相角を演繹できる。このように、提唱された作動モードで、2次高調波コンポーネントは、印加磁場の振幅および方向を提供する。
【0052】
[063] この分析は、自由層異方性Hkの効果を無視した。自由層のゼロ以外の異方性については、磁化方向は、磁場の瞬間的な方向と平行して指さない。しかし、ドライブ磁場(H0 ≫ Hk)の十分でかなりの振幅のために、異方性が修正項を由来される公式に加えることを思われる。本願明細書において、記載されている全体的な計画はうまくいく。
【0053】
[064] この振幅および位相は、当業者に周知のように直角コンポーネント(例えば、X-コンポーネントてY-コンポーネント)に変わることができる。Happlied(この種のHapplied< H0)の値の範囲のため、H0は周期的なドライブ磁場の振幅である。そして、Voutが比例している出力電圧の振幅がHappliedされる。
【0054】
[065] 角周波数ωで回転している周期的回転ドライブ磁場Hrotating440がセンサ(例えばX−Y平面)の平面において適用されるとき、自由層磁化は周期的回動ドライブ磁場Hrotating440の瞬間的な方向において指す。周期的回動ドライブ磁場Hrotating440の瞬間的な方向は、リファレンス層50に影響を及ぼさない。自由層60の異方性が十分に小さくて十分に大きい(すなわちH0>> Hk)ドライブ磁場であるので、ドライブ磁場は自由層磁化を飽和させる。
【0055】
[066] 1/fノイズ・カーブのニーを過ぎている周波数fで、磁気抵抗センサ10を駆動することによって、磁気抵抗センサ10の信号対雑音比は、ゼロ周波数の近くで動作の磁気抵抗センサの信号対雑音比より高い。f = ω/2πが1/fノイズ・カーブのニーより大きいために、ω=2πfの角周波数で周期的回動ドライブ磁場Hrotating440は決められる。
【0056】
[067] 周波数生成器200は、いかなる2次高調波コンポーネントのないスペクトルで純粋な駆動波形を出力する。第1のドライブ電流idrive1(f)431および/または第2に存在する偶数の調和コンポーネントがあり、ドライブ電流idrive2(f+Δφ)432、出力Voutは、印加磁場(すなわち無効なオフセット)さえない場合、偶数の調和コンポーネントを有する。純粋なスペクトル駆動波形が周波数生成器200によって生じない場合、検出回路の出力の無効なオフセットはユーザによって外で調整されることができる。
【0057】
[068] 図4Bに示される磁気抵抗センサシステム5は、フィードバック回路160と同様に図4Aの磁気抵抗センサシステム4のコンポーネントを含む。この磁気抵抗センサシステム5において、第1のドライブ・ストラップ71および第2のドライブ・ストラップ721は、閉ループ・モードの磁気抵抗センサ10を作動するために用いる。
【0058】
[069]フィードバック回路160は、X-コンポーネントアンプ233、X-コンポーネントインテグレータ237、Y-コンポーネントアンプ234、およびY-コンポーネントインテグレータ238を含む。ローパスフィルタ222からの信号330としての出力である2次高調波の振幅のX-コンポーネントと比例したX-出力(Vx)。信号330は、X-コンポーネントアンプ233への入力である。X-コンポーネントアンプ233から出る出力は、インテグレータ237への入力である。同時に、2次高調波のY-コンポーネントと比例したY-出力(Vy)は、ローパスフィルタ223からの信号331としての出力である。信号331は、Y-コンポーネントアンプ234への入力である。Y-コンポーネントアンプ234から出る出力は、インテグレータ238への入力である。信号330は、Happlied450のX-コンポーネントと比例しており、信号331はHapplied450のY-コンポーネントと比例している。
【0059】
[070] フィードバック回路160は、検出回路150から入力信号330および331を抽出し、第1のドライブ・ストラップ71に対する第1のヌル電流Inulling1415を出力し、第2のドライブ・ストラップ72に、第2のヌル電流Inulling2416を出力する。第1のドライブ・ストラップ71および第2のドライブ・ストラップ72は、第1のヌル磁場Hnull1425を生成するために磁気抵抗センサ10にかぶせていて、ちょっと検出されている(Happlied)磁場450のYおよび、それぞれ、X-コンポーネントに対抗している磁場Hnull2426をゼロにしている。
【0060】
[071] 第1のヌル電流Inulling1415は、第1の安定直列抵抗R1全体の電圧低下V1を測定することで測定されることができる。直列抵抗R1全体の第1のヌル電流415または対応する電圧低下V1は、印加磁場Happlied450のY-コンポーネントと比例している。レジスタR1は、固定された温度安定レジスタである。
【0061】
[072] 第2のヌル電流Inulling2416は、第2の安定直列抵抗R2全体の電圧低下V2を測定することで測定されることができる。直列抵抗R2全体の第2のヌル電流Inulling2416または対応する電圧低下V2は、印加磁場Happlied450のX-コンポーネントと比例している。レジスタR2は、固定された温度安定レジスタである。
【0062】
[073] このように、それぞれ、2次高調波信号330および331のXおよびY-コンポーネントは増幅され、Xに抵抗するフィードバック電流(すなわち、第1のヌル電流Inulling1415および第2のヌル電流Inulling2416)および外部の印加磁場のY-コンポーネントがHapplied450を統合して使われる。すなわち、印加磁場Happlied450の目盛りおよび周期的回動ドライブ磁場Hrotating440のそれがかなり切り離される時、印加磁場Happlied450が低周波または近いDCの中であると仮定される。
【0063】
[074] このように、自由層60の磁化の唯一の偏位は、周期的回転磁気ドライブ磁場Hdrive(f)440によって、生じるそれらである。磁気抵抗センサ10が印加磁場の範囲を感知するにつれて、自由層60の磁化状態のDC変動がない、その理由は、X−Y平面のいかなる印加磁場Happlied450も第1のヌル磁場Hnull1425および第2のヌル磁場Hnull2426の重ね合せによってゼロにされるからである。磁気抵抗センサ10の信号対雑音比が更に改善されて、更に磁気抵抗センサ10の磁場ダイナミックレンジを増やすために、このフィードバックはバルクハウゼン・ノイズを減らす。
【0064】
[075] 図4Aおよび4Bに示すように、磁気抵抗センサ10は、X−Y平面の矩形の側面を有する。この実施形態の他の実装では、磁気抵抗センサは、X−Y平面の円形の側面を有する。
【0065】
[076] 図5Aおよび5Bは、本発明の典型的な磁気抵抗センサに適用される異なる印加磁場のための出力をシミュレーションを示す。図5Aおよび5Bの32timeのプロット線の期間で回転ドライブ磁場H0 = 10 Oeは、内在して、示されない。
【0066】
[077] 図5Aは、2 OeまでHapplied同等のシミュレーションされた出力を示す。Happlied = 0 Oeのとき、波形495はVoutのプロットである。位相角φ = 45度(図1B)でHapplied= 2 Oeのとき、波形494はVoutのプロットである。位相角φ= 120度(図1B)でHapplied= 2 Oeのとき、波形493はVoutのプロットである。異なる波形490は、波形494および波形495の間で違いをプロットする。異なる波形491は、波形493および波形495との間で違いをプロットする。異なる波形490および491は、偶数の高調波だけを含み、主要なフーリエコンポーネントが2次高調波である。
【0067】
[078] 図5Bは、4 Oeと等しいHappliedに関するシミュレーションされた出力を示す。Happlied = 0 Oeのとき、波形465はVoutのプロット線である。位相角φ= 45度(図1B)でHapplied= 4 Oeのとき、波形464はVoutのプロット線である。位相角φ= 120度(図1B)でHapplied= 4 Oeのとき、波形463はVoutのプロット線である。異なる波形460は、波形464および波形465の違いをプロットする。異なる波形461は、波形463および波形465の違いをプロットする。異なる波形460および461は偶数の高調波だけを含み、主要なフーリエコンポーネントが2次高調波である。このように、図5Aおよび5Bは、Happliedの位相角および振幅に基づいて出力された異なる波形の変化する方法を示す。
【0068】
[079] 図6は、本発明の磁気抵抗センサ11を含んでいる磁気抵抗センサシステム6の実施形態のブロック図である。図6に示すように、磁気抵抗センサ11は、X−Y平面の円形の側面を有する。この実施形態の他の実施において、磁気抵抗センサは、形状において、矩形である。磁気抵抗センサシステム6の機能は、図4Aおよび4Bに関して上記した磁気抵抗センサシステム4および5の機能と同様である。磁気抵抗センサシステム6は、磁気抵抗センサ11、第1のドライブ・ストラップ71、第1のドライブ・ストラップ71および磁気抵抗センサ11にかぶせる第2のドライブ・ストラップ72を含む。磁気抵抗センサシステム6も、周波数生成器200および検出回路151を含む。検出回路151が、バンドパスフィルタ220、位相高感度探知器230および検出回路150のローパスフィルタ222ではなくデジタル・プロセッサ250を含むという点で、磁気抵抗センサシステム6の構造は4A図および4Bの磁気抵抗センサシステム4および5と異なる。
【0069】
[080] デジタル・プロセッサ250は、磁気抵抗センサ11から出力電圧Voutを受け取り、出力電圧Voutの2次高調波コンポーネントを抽出し、2つの信号、すなわち2次高調波の振幅のX-コンポーネントと比例したX-出力(Vx)および2次高調波のY-コンポーネントと比例したY-出力(Vy)を出力する。このように、デジタル・プロセッサ250の機能は、検出回路150(図4Aおよび4B)の機能と同様である。
【0070】
[081] 図7は、ドライブ電流の注文仕立ての形状の実施形態を示す。それぞれ、第1および第2のドライブ・ストラップ71および72に印加される第1および第2の交流ドライブ電流の形状に手をいれることによって、抽出された2次高調波コンポーネントの振幅は、当業者に周知のように増やされる。
【0071】
[082] 第1および第2の交流ドライブ電流の2つの典型的な集合651および652は、図7に示される。視聴の容易さのために、ドライブ電流701および702を交替させることの第1のセット651は、ドライブ電流751および752を交替させ、第2のセット652と相殺される。
【0072】
[083] 第1および第2の交流ドライブ電流の第1のセット651は、第1の交流ドライブ電流701(それは、時間とともに第1ののこぎりの歯形状および第2の交流ドライブ電流702を有し、それは時間とともに第2の鋸-歯形状を有する)を含む。第1の交流ドライブ電流701は、第2の交流ドライブ電流702に重畳されて示される。π/2(90度)位相シフトは、第1の交流ドライブ電流701のピークおよび第2の交流ドライブ電流702のピークの間で示される。典型的な第1の交流ドライブ電流701は、第1のストラップ71に印加される。典型的な第2の交流ドライブ電流702は、第2のストラップ71に印加される。
【0073】
[084] 第1および第2の交流ドライブ電流の第2のセット652は、第1の交流ドライブ電流751(それは、時間とともに第1ののこぎりの歯形状および第2の交流ドライブ電流752を有し、それは時間とともに正弦波形状を有する)を含む。第1の交流ドライブ電流751は、第2の交流ドライブ電流752に重畳されて示される。π/2(90度)位相シフトは、第1の交流ドライブ電流751のピークおよび第2の交流ドライブ電流752のピークの間で示される。典型的な第1の交流ドライブ電流751は、第1のストラップ71に印加される。典型的な第2の交流ドライブ電流752は、第2のストラップ71に印加される。よく理解されているように、これらは典型的な形状であり、時間対電流の他の形状が使うことができる。
【0074】
[085] 図8は、本発明の平面において、Happlied印加磁場を測定する方法800の一実施形態の工程系統図である。それぞれ、方法800は図4A、4Bおよび6に関して上記した磁気抵抗センサシステム4、5および6の実施形態に適用できる。
【0075】
[086] ブロック802で、第1の交流ドライブ電流idrive1(f)431は、磁気抵抗センサ(MS)10にかぶせている第1のストラップ71に適用される。第1の交流磁気ドライブ磁場Hdrive1(f) 433は、ドライブ電流idrive1(f)を交替させることによって、磁気抵抗センサ10において発生する。図4Aに示すように、第1の交流磁気ドライブ磁場Hdrive1(f) 433はY軸と平行して振動し、それが磁気抵抗センサ(MS)のX−Y平面にある。
【0076】
[087] 第1の交流ドライブ電流idrive1(f)431は、低いノイズ領域に磁気抵抗センサ10の操作の位置をシフトする。低いノイズ領域は、1/fノイズ・スペクトルのニーより上にある。この実施形態の1つの実装では、第1の交流ドライブ電流idrive1(f)431は、低いノイズ領域に磁気トンネル接合14の操作の位置をシフトするために磁気トンネル接合14(図2A)にかぶせている第1のドライブ・ストラップ71に適用される。この実施形態の他の実装では、第1の交流ドライブ電流idrive1(f) 431は、低いノイズ領域に巨大な磁気抵抗器13の操作の位置を移すために巨大な磁気抵抗器13(図2B)にかぶせている第1のドライブ・ストラップ71に適用される。
【0077】
[088] この実施形態の1つの実装では、交流ドライブ電流idrive1(f)431は、次のように第1のドライブ・ストラップ71に適用される:最初の周波数2fの信号は、周波数デバイダ210に対する周波数生成器200から出る出力であり、最初の周波数2fの信号は、周波数がドライブ周波数fで信号を生成するために半分において、分かれたということであり、そして、ドライブ周波数fの信号は、次に、生成器213で第1のドライブ・ストラップ71への入力を生成するために用いられる。第1の交流ドライブ電流idrive1(f)431は、ドライブ周波数fで交替している。ドライブ周波数fは、最初の周波数2fの半分である。
【0078】
[089] ブロック804で、第2の交流ドライブ電流idrive2(f+Δφ) 432が同時に第1のドライブ・ストラップ71に適用されている第1の交流ドライブ電流idrive1(f)によって、磁気抵抗センサ(MS)10にかぶせている第2のドライブ・ストラップ72に適用される。第2のドライブ・ストラップ72は、第1のドライブ・ストラップ71で、ある角度に(すなわち、非平行に)方位付けされる。この実施形態の1つの実装では、第1のドライブ・ストラップ71に対して第2のドライブ・ストラップ72は、垂直に方位付けされる。具体的には、第1のドライブ・ストラップ71は第一の方向に伸びている寸法を有し、第2のドライブ・ストラップ72は第2の方向(第1の方向に対して垂直な第2の方向)において伸びている寸法を有する。第1の交流ドライブ電流idrive1(f)431は第1の方向に流れるように適用され、その一方で、第2の交流ドライブ電流idrive2(f+Δφ)432は同時に第2の方向のに流れるように適用される。
【0079】
[090] 第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)は、ドライブ電流idrive2(f+Δφ)432を交替させることによって、磁気抵抗センサ10において発生する。
[091] 第2のドライブ・ストラップ72が第1のドライブ・ストラップ71に、0度および90度以外のいくらかの角度で方位付けされる場合、磁気抵抗センサ10または11の平面において、回転している周期的回動磁気ドライブ磁場に、生成するのに適切な様に、Δφはセットされる。第1のドライブ・ストラップ71に対して垂直な第2のドライブ・ストラップ72が方位付けされる場合、Δφはπ/2ラジアンに等しく設定される。図4Aに示すように、第2の交流磁気ドライブ磁場Hdrive2(f)はX軸と平行して振動し、それが磁気抵抗センサ(MS)のX−Y平面にある。
【0080】
[092] 第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に磁気抵抗センサ10の操作の位置をシフトする。この実施形態の1つの実装では、第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に磁気トンネル接合14の操作の位置を移すために磁気トンネル接合14(図2A)にかぶせている第2のドライブ・ストラップ72に適用される。この実施形態の他の実装では、第2の交流ドライブ電流idrive2(f+Δφ)432は、低いノイズ領域に巨大な磁気抵抗器13の操作の位置を移すために巨大な磁気抵抗器13(図2B)にかぶせている第2のドライブ・ストラップ72に適用される。
【0081】
[093] 第2の交流ドライブ電流idrive2(f+Δφ)432は、次のように第2のドライブ・ストラップ72に適用される:最初の周波数2fの信号は、周波数デバイダ210に対する周波数生成器200から出る出力であり、最初の周波数2fの信号は、周波数がドライブ周波数fで信号を生成するために半分において分かれたということであり、そして、ドライブ周波数fの信号は、次に、生成器213で第1のドライブ・ストラップ71への入力を生成するために用いられる。具体的には、ドライブ周波数fで第2のドライブ・ストラップ72に適用される第2の信号は、位相が生成器213で第1のストラップ71に印加される電流から、Δφによって、遅延した(または進んだ)ということである。第2の交流ドライブ電流idrive2(f+Δφ)432は、ドライブ周波数fで交替している。
【0082】
[094] そのことは、(周期的に回転ドライブ磁場HD = H0eiωt)が数値的に440として分類した図1Bに示され、それは磁気抵抗センサ10のX−Y平面において回転し、第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)434(図1Aおよび4A)を有する第1の交流磁気ドライブ磁場Hdrive1(f)433(図1Aおよび4A)の重ね合せによって、生成する。具体的には、Y軸に沿って振動している第1の交流磁気ドライブ磁場Hdrive1(f)433およびX軸に沿って同時に振動している第2の交流磁気ドライブ磁場Hdrive2(f+Δφ)434は周期的回動ドライブ磁場Hrotating440を生成し、それはZ軸周辺で逆時計回り方向において、回転するとして示される。
【0083】
[095] ブロック806で、磁気抵抗センサ10の出力の2次高調波コンポーネントは、磁気抵抗な(mR)センサ10から抽出される。磁気抵抗センサ10の自由層60のX−Y平面で回転する2次高調波コンポーネントは、測定されたHapplied450である磁場Hrotating440を周期的に回動磁気ドライブ磁場に重畳されるときに、発生するだけである。
【0084】
[096] この実施形態の1つの実装では、磁気抵抗センサ11(図6)の出力の2次高調波コンポーネントは、次のように抽出される:出力電圧Voutは、デジタル・プロセッサ250に対する磁気抵抗センサ11から出る出力であり、出力電圧は、デジタル・プロセッサ250で分解されるフーリエであり、最初の周波数の基準信号460は、周波数生成器200からのデジタル・プロセッサ250への入力であり、そして、最初の周波数(2f)のフーリエ分解する出力電圧の2次高調波コンポーネントは、抽出される。図6に示される磁気抵抗センサシステム6は、このように磁気抵抗センサ11の出力の2次高調波コンポーネントを抽出するように構成される。
【0085】
[097] この実施形態の他の実装では、磁気抵抗センサ10の出力の2次高調波コンポーネントは、次のように抽出される:磁気抵抗センサからの出力電圧は、バンドパスフィルタ220でフィルターをかけられ、バンドパスフィルタ220の出力(センス電圧)は、位相高感度探知器230への入力であり、最初の周波数2fの基準信号は、周波数生成器200からの位相高感度探知器230への入力であり、そして、フィルターを通した出力電圧の2次高調波コンポーネントは、位相高感度探知器230で抽出される。図4Aおよび4Bに示される磁気抵抗センサシステム4および5は、このように磁気抵抗センサ10の出力の2次高調波コンポーネントを抽出するように構成される。
【0086】
[098] ブロック808で、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)を表す信号は、検出回路から出る出力である。自由層60のX−Y平面の測定されたHapplied450である磁場のX-コンポーネントは、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)と比例している。
【0087】
[099] この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのX−投影(projection)は、図4Aおよび4Bで示す位相高感度探知器230から出る出力である。この実施形態の他の実装では、出力電圧Voutの抽出された2次高調波コンポーネントのX-投影(projection)は、図6で示すデジタル・プロセッサ250から出る出力である。
【0088】
[0100] ブロック810で、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)を表す信号は、検出回路から出る出力である。自由層60のX−Y平面の測定されたHapplied450である磁場のY-コンポーネントは、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)と比例している。
【0089】
[0101] この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)は、図4Aおよび4Bで示す位相高感度探知器230から出る出力である。この実施形態の1つの実装では、出力電圧Voutの抽出された2次高調波コンポーネントのY-投影(projection)を表す信号は、図6で示すデジタル・プロセッサ250から出る出力である。
【0090】
[0102] ブロック808および810の間の検出回路150から出る信号出力があることがありえると理解され:平面の第1の方向のための抽出された2次高調波コンポーネントの投影(projection)を表す情報を含む第1の信号と、平面の第2の方向のための抽出された2次高調波コンポーネントの投影(projection)を表す情報を含む第2の信号と、であってよく、第2の方向は第1の方向に対して直角であり、位相角情報は各々の方向の正しい投影(projection)を提供するために用いられる。
【0091】
[0103] ブロック812は、任意である。ブロック812で、第1のヌル電流Inulling1415は磁気抵抗センサ10の第1のヌル磁場Hnull1425を生成するために第1のドライブ・ストラップ71に適用され、第2のヌル電流Inulling2416は磁気抵抗センサ10(図4Bを参照)の第2のヌル磁場Hnull2426を生成するために第2のドライブ・ストラップ72に適用される。第1のヌル磁場Hnull1425が、測定される磁場Happlied450の第1のコンポーネント(例えばY-コンポーネント)と平行であり、且つ対向している。第2のヌル磁場Hnull2426が、測定される磁場Happlied450の第2のコンポーネント(例えばX-コンポーネント)と平行であり、且つ対向している。第1および第2のヌル磁場Hnull(1-2) 425および426は、一緒にバルクハウゼン・ノイズを減らして、センサのダイナミックレンジを増やす。
【0092】
[0104] この実施形態の1つの実装では、第1および第2のヌル電流415および416は、次のように磁気抵抗センサ10のそれぞれの第1および第2のヌル磁場425および426を生成するために第1および第2のそれぞれの第1のドライブ・ストラップ71および72に印加される:それぞれ、最初の周波数の2次高調波信号は、アンプ233および234によって、XおよびY-コンポーネントに映され、増幅された2次高調波信号330および331は、それぞれ抽出された2次高調波コンポーネントのコンポーネント(例えばXおよびY-コンポーネント)と比例している第2のヌル電流Inulling2416および第1のヌル電流Inulling1415を生成するために統合される。具体的には、第1のヌル電流Inulling1415は、第1のドライブ・ストラップ71に対するインテグレータ238からの入力であり、第2のヌル電流Inulling2416は、第2のドライブ・ストラップ72に対するインテグレータ237からの入力である。このように、測定されたHapplied450である磁場に対抗している第1および第2のヌル磁場425および426は、磁気抵抗センサ10において、発生する。ブロック812がインプリメントされる場合だけ、814ブロックは任意で、起こる。ブロック814、V2およびV1が固定して測定される電圧、温度安定レジスタR2およびR1で、それぞれの第2で第1のヌル電流がいずれに渡るか、それぞれのXおよび印加フィールドのY-コンポーネントを決定する。
【0093】
例示の実施形態
[0105] 実施形態1は、面(X−Y)に適用された磁場(450)を測定する方法であって、
第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、
第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、
測定される適用された磁場が、面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、
面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法を含む。
【0094】
[0106] 実施形態2は、出力電圧(Vout)の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号(330)を出力するステップと、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号(331)を出力するステップと、
を更に有することを特徴とする実施形態1に記載の方法を含む。
【0095】
[0107] 実施形態3は、
磁気抵抗センサからの出力電圧出力の2次高調波コンポーネントを抽出するステップが:
磁気抵抗センサからデジタル・プロセッサに出力電圧を出力するステップと、
デジタル・プロセッサで出力電圧をフーリエ分解するステップと、
周波数生成器からデジタル・プロセッサへの最初の周波数で基準信号を入力するステップと、
最初の周波数でフーリエ分解された出力電圧の2次高調波コンポーネントを抽出するステップと、
を含むことを特徴とする実施形態1-2のいずれかの方法を含む。
【0096】
[0108] 実施形態4は、
磁気抵抗センサから出る出力電圧の2次高調波コンポーネントを抽出するステップが、
バンドパスフィルタで磁気抵抗センサから出力電圧をフィルタリングするステップと、
バンドパスフィルタの出力を位相高感度探知器に入力するするステップと、
周波数生成器からの位相高感度探知器への最初の周波数で基準信号源を入力するステップと、
位相高感度探知器でフィルタリングされた出力電圧の2次高調波コンポーネントを抽出するステップと、
を有することを特徴とする実施形態1-3のいずれかの方法を含む。
【0097】
[0109] 実施形態5は更に、
磁気抵抗センサの第1のヌル磁場を生成するために第1のストラップに第1のヌル電流を適用するステップであって、第1のヌル磁場が、測定される適用された磁場の第1のコンポーネントに対して並行であり且つ対向することを特徴とする、ステップと、
磁気抵抗センサの第2のヌル磁場を生成するために第2のストラップに第2のヌル電流を適用するステップであって、第2のヌル磁場が、測定される適用された磁場の第2のコンポーネントに対して並行であり且つ対向することを特徴とするステップと、
を有することを特徴とする実施形態1-4のいずれかに記載の方法を含む。
【0098】
[0110] 実施形態6は更に、
周波数生成器から周波数デバイダへ最初の周波数で信号を出力するステップと、
ドライブ周波数(最初の周波数の半分であるドライブ周波数)で信号を生成するために最初の周波数で信号を周波数分解するステップと、
を有し、
第1の交流を第1のストラップに適用するステップが、
第1のストラップに第1の交流ドライブ周波数で信号を入力するステップからなり、
第1の交流ドライブ電流が、ドライブ周波数での交流であり、
第2の交流を第2のストラップに適用するステップが、
第2のストラップに第2の交流ドライブ周波数で信号を入力するステップからなり、
第2の交流ドライブ電流が、ドライブ周波数での交流であることを特徴とする、実施形態1-5のいずれかに記載の方法を含む。
【0099】
[0111] 実施形態7は更に、
第1のストラップに適用された第1の交流ドライブ電流の形状を仕立てるステップと、
第2のストラップに適用された第2の交流ドライブ電流の形状を仕立てるステップと、
を有することを特徴とする実施形態1-6のいずれかに記載の方法を含む。
【0100】
[0112] 実施形態8は、
磁気抵抗センサにかぶせている第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップが、
磁気トンネル接合の上に横たわる第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップ、または、
巨大な磁気抵抗センサの上に横たわる第1のストラップに第1の交流ドライブ電流を適用し、第1のストラップの上に横たわる第2のストラップに第2の交流ドライブ電流を同時に適用するステップ
のいずれか一方を含む実施形態1-7のいずれかに記載の方法を含む。
【0101】
[0113]実施形態9は、
平面において磁場の大きさおよび方位を測定するための磁気抵抗センサシステムを包含し、
上記磁気抵抗センサシステムは、
回転可能な磁化方位を有する強磁性自由層から成る磁気抵抗センサと、
ピンでとめられた磁化方位を有する強磁性リファレンス層と、
そららの間に障壁層と、
第1の交流ドライブ電流を担持するために磁気抵抗センサにかぶせている第1のストラップと、
第2の交流ドライブ電流を担持するために磁気抵抗センサにかぶせている第2のストラップであって、第2の交流ドライブ電流が、第1の交流ドライブ電流とは位相が異なることを特徴とする、第2のストラップと、
を有し、
第2のストラップは、第1のストラップの一部の上に横たわり、磁気抵抗センサは、平面において、回転している周期的回動ドライブ磁場に従属する、ことを特徴とする。
【0102】
[0114] 実施形態10は、
磁気抵抗センサから出力された電圧出力を受け取り、出力電圧の2次高調波コンポーネントを抽出する検出回路を更に有し、
測定される磁場の大きさは、出力電圧の抽出された2次高調波コンポーネントの振幅と比例し、測定される磁場の方位は、出力電圧の抽出された2次高調波コンポーネントの位相角に単に関係する、ことを特徴とする実施形態9の磁気抵抗センサシステムを含む。
【0103】
[0115] 実施形態11は、検出回路が、
磁気抵抗センサから出力されている出力電圧を入力としてとるバンドパスフィルタと;
センス電圧をバンドパスフィルタから入力としてとり、周波数生成器から基準信号を入力としてとる位相高感度探知器と、を有する、
ことを特徴とする、実施形態10の磁気抵抗センサシステムを含む。
【0104】
[0116] 実施形態12は、
第1のヌル電流を第1のストラップに提供し、第2のヌル電流を第2のストラップに提供するフィードバック回路を更に有することを特徴とする実施形態9-11のいずれかに記載の磁気抵抗センサシステムを含む。
【0105】
[0117] 実施形態13は、
検出回路が、
フーリエ分解された出力電圧の2次高調波コンポーネントを抽出し、出力電圧の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号と、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号とを出力するデジタル・プロセッサ
を含むことを特徴とする実施形態10-12のいずれかに記載の磁気抵抗センサシステムを含む。
【0106】
[0118] 実施形態14は、強磁性自由層と上に横たわるドライブ磁場ストラップとの間に位置する絶縁層を更に有する、実施形態9-13のいずれかに記載の磁気抵抗センサシステムを含む。
【0107】
[0119] 実施形態15は、
磁気抵抗センサが、巨大な磁気抵抗器であることを特徴とする、実施形態9-14のいずれかの磁気抵抗センサシステムを含む。
【0108】
[0120] 実施形態16は、
磁気抵抗センサが、磁気トンネル接合であることを特徴とする、実施形態9-15のいずれかの磁気抵抗センサシステムを含む。
【0109】
[0121] 実施形態17は、
第1のストラップに第1の交流ドライブ電流を供給し、第2のストラップに第2の交流ドライブ電流を供給する周波数生成器を更に有し、
磁気抵抗センサ、第1のストラップ、第2のストラップおよび周波数生成器が、シリコン基板に統合される、ことを特徴とする実施形態9-16のいずれかに記載の磁気抵抗センサシステムを含む。
【0110】
[0122] 実施形態18は、磁気抵抗センサ、第1のドライブ・ストラップ、および、第2のドライブ・ストラップはシリコン基板に統合されることを特徴とする、実施形態9-17のいずれかに記載の磁気抵抗センサシステムを含む。
【0111】
[0123] 実施形態19は、
第1のストラップが、第一の方向に伸びている寸法を有し、第2のストラップが、第2の方向(第1の方向に対して垂直な第2の方向)に伸びている寸法を有し、第2の交流ドライブ電流が、第1の交流ドライブ電流とは位相が90度異なることを特徴とする、実施形態9-18のいずれかに記載の磁気抵抗センサシステムを含む。
【0112】
[0124] 実施形態20は、磁場を検出するための磁気抵抗センサシステムを含み、
磁気抵抗センサシステムが:
スイッチで切り替え可能な磁化方位、ピンでとめられた磁化方位を有する強磁性リファレンス層、および、それらの間に障壁層を有する強磁性自由層を有する磁気抵抗センサと;
第1のストラップで第1の交流ドライブ電流を担持するための第1のドライブ・ストラップであって、第1のストラップの少なくとも一部が磁気抵抗センサの上に横たわり、第1のストラップが第一の方向に伸びる大きさを有することを特徴とする第1のドライブ・ストラップと、
ドライブ周波数で第2の交流ドライブ電流を担持するための第2のドライブ・ストラップであって、第2のストラップの少なくとも一部が第1のストラップの一部の上に横たわり、第2のストラップが第2の方向に伸びる大きさを有し、第2の方向が第1の方向とは平行でないことを特徴とする第2のドライブ・ストラップと、
第1のドライブ・ストラップに第1の交流ドライブ電流を供給し、第2のドライブ・ストラップに第2の交流ドライブ電流を供給する生成器と、
磁気抵抗センサからの出力電圧を入力し、第1および第2のドライブ交流ドライブ電流の周波数の2倍である最初の周波数で基準信号を入力し、出力電圧の2次高調波コンポーネントのX−投影(projection)を示す信号を出力し、
出力電圧の2次高調波コンポーネントのY−投影(projection)を示す信号を出力するように操作可能な検出回路と、
出力電圧の2次高調波コンポーネントのY−投影(projection)を表す信号を増幅する第1のアンプと、
出力電圧の2次高調波コンポーネントのY−投影(projection)を示す増幅された信号を統合し、第1のドライブ・ストラップに第1のヌル電流を出力する第1のインテグレータと、
第1のインテグレータの出力で第1の直列抵抗であって、第1の直列抵抗全体の電圧低下が、適用された磁場のY-コンポーネントに比例することを特徴とする、第1の直列抵抗と、
出力電圧の2次高調波コンポーネントのY−投影(projection)を表す信号を増幅する第2のアンプと、
出力電圧の2次高調波コンポーネントのX−投影(projection)を表す増幅された信号を統合し、第2のドライブ・ストラップに第2のヌル電流を出力する第2のインテグレータと、
第2のインテグレータの出力の第2の直列抵抗であって、第2の直列抵抗全体の電圧低下が、適用された磁場のX-コンポーネントに比例していることを特徴とする、第2の直列抵抗と、
を有することを特徴とする。
【0113】
[0125] 以下の請求項によって規定される本発明の多くの実施形態を記載してきた。それにもかかわらず、特許請求の範囲の発明の趣旨および範囲から逸脱することなく、記載されている実施形態に対するさまざまな変更態様がなされることができると理解される。従って、他の実施形態は以下の特許請求の範囲内にある。
【特許請求の範囲】
【請求項1】
平面(X−Y)に適用された磁場(450)を測定する方法であって、
第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、
第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、
測定される適用された磁場が、平面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、
平面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、平面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法。
【請求項2】
出力電圧(Vout)の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号(330)を出力するステップと、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号(331)を出力するステップと、
を更に有することを特徴とする請求項1に記載の方法。
【請求項3】
平面(X−Y)の磁場(450)の大きさ(|Happlied|)および方位(φ)を測定するための磁気抵抗センサシステム(4)であって、
磁気抵抗センサシステムが、
回転可能な磁化方位を備えた強磁性自由層(60)と、ピン固定された磁化方位を備えた強磁性自由層(50)と、それらの間に障壁層(40)とを備えた磁気抵抗センサ(10)と、
第1の交流ドライブ電流(431)を運ぶために磁気抵抗センサが上に横たわる第1のストラップ(71)と、
第2の交流ドライブ電流(432)を運ぶために磁気抵抗センサが上に横たわる第2のストラップ(72)であって、前記第2の交流ドライブ電流が前記第1の交流ドライブ電流とは位相が異なり、前記第2のストラップが、前記第1のストラップの一部(66)の上に横たわり、磁気抵抗センサが平面において周期的に回転するドライブ磁場(440)回転にさらされることを特徴とする、第2のストラップ(72)と、
磁気抵抗センサ(10)から出力電圧(Vout)出力を受け、出力電圧の2次高調波コンポーネントを抽出するための検出回路(150)であって、測定される磁場(450)の大きさ(|Happlied|)が、出力電圧の抽出された2次高調波コンポーネントの振幅に比例し、測定される磁場の方位が、出力電圧の抽出された2次高調波コンポーネントの位相角に単純に関係することを特徴とする検出回路(150)と
を有することを特徴とする磁気抵抗センサシステム(4)。
【請求項1】
平面(X−Y)に適用された磁場(450)を測定する方法であって、
第1の交流ドライブ電流(431)を第1のストラップ(71)に適用するステップであって、第1のストラップの少なくとも一部(65)が、磁気抵抗センサ(10)の上に横たわり、第1のストラップが、第1の方向(X)に延びる大きさを有することを特徴とするステップと、
第2の交流ドライブ電流(432)を第2のストラップ(72)に同時に適用するステップであって、第2のストラップの少なくとも一部(66)が第1のストラップの少なくとも一部の上に横たわり、第2のストラップが第2の方向(Y)に延びる大きさを有し、第2の方向が、第1の方向と並行ではなく、第2の交流ドライブ電流が、第1の交流ドライブ電流と位相が異なり、磁気抵抗センサが、磁気抵抗センサの平面で回転する周期的回転磁気ドライブ磁場(440)に影響を受けることを特徴とするステップと、
測定される適用された磁場が、平面の周期的な回転磁気ドライブ磁場回転で重畳されるとき、磁気抵抗センサから出力電圧(Vout)出力の2次高調波コンポーネントを抽出するステップとを有し、
平面で測定される適用された磁場の大きさが、出力電圧の抽出された2次高調波コンポーネントの振幅(|Happlied|)に比例し、平面で測定される適用された磁場の方位(φ)が、出力電圧の抽出された2次高調波コンポーネントの位相角に関係する、ことを特徴とする方法。
【請求項2】
出力電圧(Vout)の抽出された2次高調波コンポーネントのX−投影(projection)を示す信号(330)を出力するステップと、
出力電圧の抽出された2次高調波コンポーネントのY−投影(projection)を示す信号(331)を出力するステップと、
を更に有することを特徴とする請求項1に記載の方法。
【請求項3】
平面(X−Y)の磁場(450)の大きさ(|Happlied|)および方位(φ)を測定するための磁気抵抗センサシステム(4)であって、
磁気抵抗センサシステムが、
回転可能な磁化方位を備えた強磁性自由層(60)と、ピン固定された磁化方位を備えた強磁性自由層(50)と、それらの間に障壁層(40)とを備えた磁気抵抗センサ(10)と、
第1の交流ドライブ電流(431)を運ぶために磁気抵抗センサが上に横たわる第1のストラップ(71)と、
第2の交流ドライブ電流(432)を運ぶために磁気抵抗センサが上に横たわる第2のストラップ(72)であって、前記第2の交流ドライブ電流が前記第1の交流ドライブ電流とは位相が異なり、前記第2のストラップが、前記第1のストラップの一部(66)の上に横たわり、磁気抵抗センサが平面において周期的に回転するドライブ磁場(440)回転にさらされることを特徴とする、第2のストラップ(72)と、
磁気抵抗センサ(10)から出力電圧(Vout)出力を受け、出力電圧の2次高調波コンポーネントを抽出するための検出回路(150)であって、測定される磁場(450)の大きさ(|Happlied|)が、出力電圧の抽出された2次高調波コンポーネントの振幅に比例し、測定される磁場の方位が、出力電圧の抽出された2次高調波コンポーネントの位相角に単純に関係することを特徴とする検出回路(150)と
を有することを特徴とする磁気抵抗センサシステム(4)。
【図1A】

【図1B】
【図2A】

【図2B】
【図3A】
【図3B】
【図4A】
【図4B】
【図5A】
【図5B】

【図6】
【図7】

【図8】
【図1B】
【図2A】
【図2B】
【図3A】
【図3B】
【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【公開番号】特開2013−101116(P2013−101116A)
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−240603(P2012−240603)
【出願日】平成24年10月31日(2012.10.31)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成25年5月23日(2013.5.23)
【国際特許分類】
【出願番号】特願2012−240603(P2012−240603)
【出願日】平成24年10月31日(2012.10.31)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]