
印刷装置
【課題】印刷装置の原点位置の確認動作における動作時間を短縮する手段を提供する。
【解決手段】印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、印刷ヘッドに印刷データを供給する印刷制御部と、印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、位置検出部によりキャリッジの原点位置の確認を行う位置制御部とを有し、位置制御部は、印刷終了後のキャリッジ位置から位置検出部までキャリッジが移動する時間と、位置検出部から次の印刷開始位置までキャリッジが移動する時間との和が、印刷終了後から次の印刷位置まで記録媒体を搬送する時間より短い場合に、位置検出部によるキャリッジの原点位置確認動作を行う。
【解決手段】印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、印刷ヘッドに印刷データを供給する印刷制御部と、印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、位置検出部によりキャリッジの原点位置の確認を行う位置制御部とを有し、位置制御部は、印刷終了後のキャリッジ位置から位置検出部までキャリッジが移動する時間と、位置検出部から次の印刷開始位置までキャリッジが移動する時間との和が、印刷終了後から次の印刷位置まで記録媒体を搬送する時間より短い場合に、位置検出部によるキャリッジの原点位置確認動作を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、シリアルプリンタ等の印刷装置に関する。
【背景技術】
【0002】
シリアルプリンタにおける記録媒体への印刷は、印刷ヘッドが搭載されたキャリッジを主走査方向へ移動させながら行うのが、一般的である。
【0003】
この場合に、キャリッジを主走査方向へ移動させる手段としては、DCモータまたはステッピングモータが用いられる。
【0004】
DCモータを用いた場合、そのキャリッジの移動量は、キャリッジの移動とともに回転するスリットエンコーダから発生するパルス数によって監視され、そのパルス数をカウントすることで、キャリッジの移動量および現在位置を制御部が認識でき、キャリッジの移動に何らかの障害、例えばモータの脱調が発生した場合でもパルス数の変化によって異常を認識することができる。
【0005】
一方、ステッピングモータを用いた従来の印刷装置は、印刷ヘッドを搭載したキャリッジの原点における位置合せを、原点検出センサがキャリッジを検出するまでキャリッジを左右に移動させて行い、位置合せをした後は、ステッピングモータに供給するパルス数でキャリッジの現在位置を論理的に認識してその位置制御を行っている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭64−72875号公報(第1頁右欄3行−13行、第2図)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した従来の特許文献1の技術においては、原点における位置合せをした後は、ステッピングモータに供給するパルス数でキャリッジの現在位置を論理的に認識してその位置制御を行っているため、印刷中にステッピングモータに脱調が発生した場合には、論理的に認識した位置(論理位置という。)とキャリッジの物理的な位置(物理位置という。)とに相違が発生したとしても、その発生を知ることができないという問題がある。
【0008】
このため、従来の印刷装置においては、予め設定されたタイミング(数行印刷毎、改ページ毎、数ページ毎等)での印刷動作の終了後に、記録媒体を1行分搬送し、その後にキャリッジを原点検出センサの位置に移動させ、そのときの原点検出センサによる検出状態により論理位置と物理位置とのずれを認識して論理位置と物理位置とを同期させることが行われている。
【0009】
この場合に、原点位置の確認動作における動作時間は、改行に要する時間とキャリッジの原点位置センサまでの移動時間との合計時間となり、またキャリッジの移動時間は印刷終了位置により変動するため、印刷終了位置によってはキャリッジの移動時間が長くなり、原点位置の確認動作の動作時間が更に長くなって、印刷処理における処理効率が低下するという問題がある。
【0010】
本発明は、上記の問題点を解決するためになされたもので、原点位置の確認動作における動作時間を短縮する手段を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するために、印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、前記印刷ヘッドに印刷データを供給する印刷制御部と、前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部とを有し、前記位置制御部は、印刷終了後の前記キャリッジ位置から前記位置検出部まで前記キャリッジが移動する時間と、前記位置検出部から次の印刷開始位置まで前記キャリッジが移動する時間との和が、前記印刷終了後から次の印刷位置まで前記記録媒体を搬送する時間より短い場合に、前記位置検出部による前記キャリッジの原点位置確認動作を行うことを特徴とする。
【発明の効果】
【0012】
これにより、本発明は、原点位置確認動作に要する時間を短縮することができ、印刷処理における処理効率を向上させることができるという効果が得られる。
【図面の簡単な説明】
【0013】
【図1】実施例1の印刷装置の構成を示すブロック図
【図2】実施例1のキャリッジを示す説明図
【図3】実施例1の印刷装置の主制御部の構成を示すブロック図
【図4】実施例1のスペースモータの移動動作を示す説明図
【図5】実施例1のスペースモータのステップ時間を示す説明図
【図6】実施例1の原点位置確認処理を示すフローチャート
【図7】実施例2の印刷装置の主制御部の構成を示すブロック図
【図8】実施例2のキャリッジの動作を示す説明図
【図9】実施例2の原点位置確認処理を示すフローチャート
【発明を実施するための形態】
【0014】
以下に、図面を参照して本発明による印刷装置の実施例について説明する。
【実施例1】
【0015】
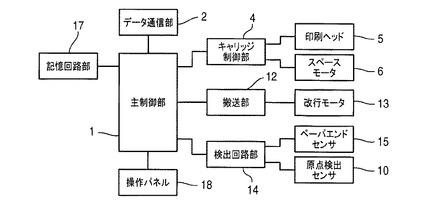
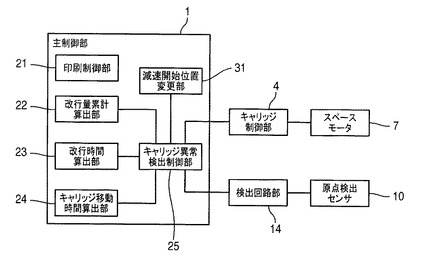
図1において、1は印刷装置の主制御部であり、データ通信部2を介して図示しないパーソナルコンピュータ等の上位装置から、制御データや印刷情報、制御信号等の印刷指示情報を受信し、受信した印刷指示情報の解釈やイメージバッファへの展開を行う。
【0016】
なお、データ通信部2は、上位装置からの各種データの受信や、上位装置との間で制御信号の送受信を行う。
【0017】
4はキャリッジ制御部であり、例えば印刷装置がドットプリンタである場合は、主制御部1が生成した所定のドットパターンを印刷するための複数のドットピンを備えた印刷ヘッド5、記録媒体としての用紙Pの幅方向(用紙の搬送方向の直交方向をいう)である主走査方向に印刷ヘッド5を往復移動させる、ステッピングモータからなるスペースモータ6を制御して、印刷ヘッド5を往復移動させながら、その往路および復路において用紙P上にドットパターンを印刷する機能を有している。
【0018】
なお、印刷装置がインクジェットプリンタの場合は、複数のノズルを備えた印刷ヘッド5が用いられる。
【0019】
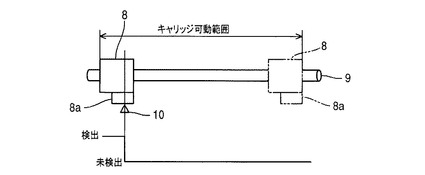
図2において、8はキャリッジであり、ガイド軸9上を往復移動する印刷ヘッド5を搭載したユニットであって、位置検出部としての光学式の原点検出センサ10の光軸を遮断するための突起8aが設けられている。
【0020】
この原点検出センサ10は、装置本体に設けられ、キャリッジ6の移動方向の一の端部(本実施例では、搬送方向に向かって左側の端部)に設定された原点位置に設けられている。
【0021】
図1において、12は搬送部であり、用紙Pを搬送方向(主走査方向に直交する副走査方向と同じ方向。)に搬送するための改行モータ13を備えており、印刷ヘッド5により印刷された用紙Pを搬送して改行送りを行う機能を有している。
【0022】
14は検出回路部であり、用紙Pの有無を検出するペーパエンドセンサ15と、スペースモータ6により移動するキャリッジ8の位置制御の基準となる原点位置に設けられた原点検出センサ10とに電気的に接続しており、ペーパエンドセンサ15および原点検出センサ10からの検出信号を主制御部1へ出力する機能を有している。
【0023】
17は記憶部としての記憶回路部であり、主制御部1から送信される印刷データを格納したり、その印刷データを印刷するためにイメージバッファに展開したりするためのバッファメモリや、検出回路部14のペーパエンドセンサ15から出力された用紙端位置情報や、キャリッジ8の現在位置を示すキャリッジ位置情報、主制御部1が用いる各種のデータ、主制御部1による処理結果等を記憶するためのランダムアクセスメモリ、操作パネル18において選択されたセットアップモード(メニュー設定)を記憶するための不揮発性メモリ、主制御部1が実行するプログラムを格納するためのフラッシュメモリ等を備えている。
【0024】
前記のキャリッジ位置情報には、原点検出センサ10により校正された論理的な原点位置を基準に、スペースモータ6に供給した正逆方向のパルス数によって認識したキャリッジ8の倫理的な現在位置がキャリッジ8に移動の度に更新しながら記憶される。
【0025】
操作パネル18は、動作モードをセットアップするための図示しない操作キー、操作状況を表示するためのLED表示部やLEDランプ等を備えている。
【0026】
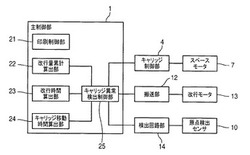
図3において、21は主制御部1に形成された印刷制御部であり、受信した印刷指示情報を基に、インパクトデータや印刷開始位置情報、印刷終了位置情報等の印刷データ等の、印刷に関る各種の情報を作成する機能、作成した印刷データ等を印刷ヘッド5へ供給する機能を有している。
【0027】
22は主制御部1に形成された改行量累計算出部であり、前回の原点位置確認動作(後述)から現在までの累積改行量を長さの単位で算出してカウントする機能、および累積改行量が記憶回路部17のメモリに格納されている予め設定された所定の改行量である判定改行量Ks(単位:インチ)を超えた場合に脱調検出要求を発生させ、これを記憶回路部17のメモリの脱調検出要求フラグの記憶エリアに脱調検出が必要であることを示すフラグ(本実施例では、発生時「1」、リセット時「0」)を記憶させる機能を有している。
【0028】
また、記憶回路部17のメモリには、原点位置確認動作を実行するための判定条件(後述)に合致しないために原点位置確認動作を実行できない期間が長くなる場合に、強制的に原点位置確認動作を実行するための改行量である上限改行量Kj(単位:インチ)が予め設定され格納されている。
【0029】
23は主制御部1に形成された改行時間算出部であり、現在行から次行までの1行分の用紙Pの搬送時間である改行時間Aを算出する機能を有している。
【0030】
24は主制御部1に形成されたキャリッジ移動時間算出部であり、キャリッジ8の現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ8の移動時間であるキャリッジ移動時間B、および原点位置から次行の印刷開始位置までのキャリッジ8の移動時間であるキャリッジ移動時間C、を算出する機能を有している。
【0031】
25は主制御部1に形成された位置制御部としてのキャリッジ異常検出制御部であり、改行量累計算出部22による脱調検出要求が発生している場合に、改行時間算出部23で算出した改行時間A、キャリッジ移動時間算出部24で算出したキャリッジ移動時間BおよびCを基に、原点位置確認動作の可否を判定し、原点位置確認動作が可能と判定した場合に、搬送部12の改行モータ13による改行動作を実行しながらキャリッジ制御部4のスペースモータ6により、キャリッジ8を論理的に認識している原点位置に移動させ、移動させたキャリッジ8を原点検出センサ10が検出したか否かによって、キャリッジ8の論理位置と物理位置との一致を確認し、不一致の場合にキャリッジ8を原点検出センサ10が検出した位置を原点位置として、記憶回路部17の論理的なキャリッジ位置情報を初期化して校正する原点位置確認動作を実行する機能を有している。
【0032】
なお、図3に示す各部を接続する実線は、原点位置確認動作の実行における情報の流れを示したものである。
【0033】
また、上記した印刷制御部21、改行量累計算出部22、改行時間算出部23、キャリッジ移動時間算出部24、キャリッジ異常検出制御部25は、主制御部1が実行するプログラムのソフトウェアにより形成された機能手段である。
【0034】
上記の改行時間算出部23による改行時間Aの算出は、本実施例の改行モータ13の1パルス当りの移動量が1/360インチ(0.07mm)となっているので、例えば改行速度が5インチ/秒の場合であって、次行までの改行量が1インチのときは、改行時間Aは0.2秒と算出される。なお改行モータ13の1パルス当りの移動量が1/432インチ(0.06mm)となっている場合も、改行速度は同じであるので、改行時間Aは同じ時間として算出される。
【0035】
また、キャリッジ移動時間算出部24によるキャリッジ移動時間Bの算出は、本実施例のスペースモータ6の1パルス当りの移動量が1/180インチ(0.14mm)となっているので、例えば移動速度が15インチ/秒の場合であって、移動量が5インチのときは、キャリッジ移動時間Bは約0.34秒と算出される。
【0036】
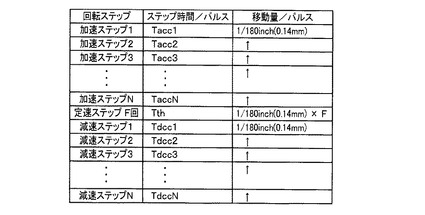
この場合のキャリッジ8の現在位置から目標位置までの移動は、図4に示すように、加速領域と定速領域と減速領域とで構成され、1パルス当りのステップ時間は、図5に示すように、加速領域、定速領域、減速領域でそれぞれ異なるように設定されている。
【0037】
また、加速ステップ数と減速ステップ数は、移動速度に対して固定ステップ数となるように設定されているため、目標位置までの総ステップ数が決定すれば、
加速ステップ時間=Tacc1+Tacc2+Tacc3+・・・+TaccN ・・・・・(1)
減速ステップ時間=Tdcc1+Tdcc2+Tdcc3+・・・+TdccN ・・・・・(2)
定速ステップ時間=Tth×(総ステップ数−(加速ステップ数+減速ステップ数))
・・・・・(3)
キャリッジ移動時間=加速ステップ時間+定速ステップ時間+減速ステップ時間
・・・・・(4)
で算出される。
【0038】
なお、加速ステップ時間は、Tacc1、Tacc2、Tacc3・・・TaccNの順に短いステップ時間になるように設定され、減速ステップ時間はTdcc1、Tdcc2、Tdcc3・・・TdccNの順に長いステップ時間となるように設定されている。
【0039】
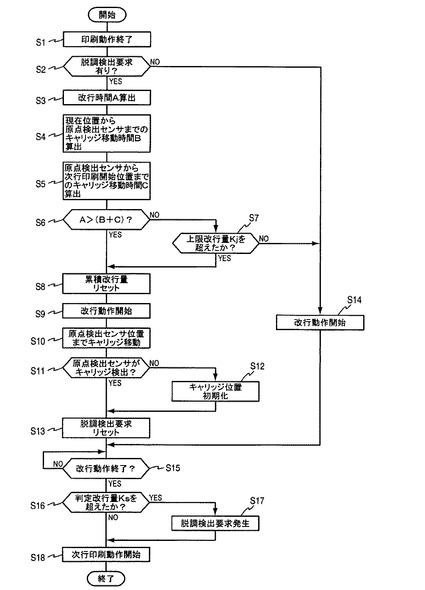
以下に、図6にSで示すステップに従って、本実施例の原点位置確認処理について説明する。
【0040】
印刷装置へ電源が投入されると、記憶回路部17のメモリに格納されているプログラムが自動的に起動され、主制御部1は、電源投入時の初期動作を実行する。
【0041】
すなわち、主制御部1は、キャリッジ制御部4によってスペースモータ6を回転させ、キャリッジ8を主走査方向へ移動させ、原点検出センサ10がキャリッジ8を検出したときにキャリッジ8を減速させて停止させ、その検出位置を原点位置として記憶回路部17のキャリッジ位置情報を「0」に初期化して校正し、キャリッジ8の物理位置と論理位置とを同期させる原点検出動作を行い、上位装置からの印刷指示情報をデータ通信部2を介して受信したときに印刷動作を開始する。
【0042】
S1、印刷動作を開始した主制御部1は、印刷制御部21で生成した印刷データをキャリッジ制御部4へ送り、キャリッジ制御部4によってキャリッジ8を移動させながら用紙P上に1行分の印刷を行い、その行の最後まで印刷して1行分の印刷動作を終了させる。
【0043】
S2、1行分の印刷動作の終了後に、主制御部1は記憶回路部17のメモリを確認して脱調検出要求の存否を確認し、メモリの脱調検出要求フラグの記憶エリアに脱調検出が必要であることを示すフラグが記憶されている場合(ステップS17参照)は、脱調検出要求が発生していることを認識してステップS3へ移行する。メモリに脱調検出要求フラグが記憶されていない場合(ステップS13におけるリセット状態の場合)は、次行の印刷動作の実行を判定してステップS14へ移行する。
【0044】
S3、脱調検出要求が発生していることを認識した主制御部1は、改行時間算出部23によって1行分の改行時間Aを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0045】
S4、これと並行して主制御部1は、キャリッジ移動時間算出部24によって、記憶回路部17に記憶されているキャリッジ位置情報を基に1行分の印刷動作の終了後のキャリッジ8の現在位置を認識し、その現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ移動時間Bを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0046】
S5、また、主制御部1は、キャリッジ移動時間算出部24によって、原点検出センサ10が設けられた原点位置から次行の印刷開始位置までのキャリッジ移動時間Cを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0047】
このキャリッジ移動時間Cは、実際には次行の印刷動作の開始時に実行されるキャリッジ8の移動時間であるので、独立した動作ではないが、キャリッジ移動時間Cが長い場合は、次行の印刷の開始までの時間が長くなり、結果として印刷をしていない時間が増えてしまうことを防止することを目的として、これを考慮するために算出するものである。
【0048】
なお、キャリッジ移動時間Cは、次行の印刷開始位置が確定している場合にのみ算出する時間であり、次行の印刷データがない場合や、上位装置からのデータ送信が遅く次行の印刷データが確定していない場合は考慮する必要がないため「0」とみなす。
【0049】
S6、改行時間A、キャリッジ移動時間BおよびCを算出してキャリッジ異常検出制御部25へ送信させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ移動時間Bとキャリッジ移動時間Cとの和が、改行時間A未満の場合、つまり改行時間Aより短い場合は、原点位置確認動作の実行を可能と判定してステップS8へ移行する。キャリッジ移動時間Bとキャリッジ移動時間Cとの和が、改行時間A以上の場合は、原点位置確認動作の実行を不可能と判定してステップS7へ移行する。
【0050】
このようにして、キャリッジ移動時間Cを考慮した判定条件による原点位置確認動作の実行の可否が判定される。
【0051】
S7、原点位置確認動作の実行を不可能と判定した主制御部1は、改行量累計算出部22で算出した現在の累積改行量と、記憶回路部17のメモリに格納されている上限改行量Kjとを比較し、現在の累積改行量が上限改行量Kjを超えている場合は、原点位置確認動作を強制的に実行することを判定してステップS8へ移行する。現在の累積改行量が上限改行量Kj以下の場合は、次行の印刷動作の実行を判定してステップS14へ移行する。
【0052】
このように、原点位置確認動作の強制実行を行うのは、キャリッジ移動時間BとCとの和が、改行時間A以上となる印刷パターンが連続する場合に、脱調検出要求が発生していても、原点位置確認動作を長期間に亘って行うことができなくなるため、ステッピングモータの脱調が生じたか否かを強制的に確認して、それによる不具合の発生を回避するためである。
【0053】
S8、原点位置確認動作の実行を判定した、または原点位置確認動作の強制実行を判定した主制御部1は、改行量累計算出部22によって累積改行量を「0」にリセットする。
【0054】
S9、累積改行量をリセットした主制御部1は、原点検出センサ10が設けられた原点位置へのキャリッジ8の移動動作と、次行への改行動作とを同時に実行するために、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、改行動作を開始する。
【0055】
S10、これと並行して主制御部1は、キャリッジ異常検出制御部25によって、原点位置でキャリッジ8が停止するように、加減速領域を含む現在位置から原点位置までの総ステップ数を算出し、キャリッジ制御部4によって図5に示すタイムテーブルに従ったパルスをスペースモータ6へ供給して、論理的な原点位置へキャリッジ8を移動させ停止させる。
【0056】
S11、論理的な原点位置へキャリッジ8を停止させた主制御部1は、キャリッジ異常検出制御部25によって、検出回路部14から出力される原点検出センサ10からの検出信号を確認し、原点検出センサ10からキャリッジ8を検出した検出信号(図2参照)が出力されている場合は、論理的な原点位置と物理的な原点位置との一致により正常と判定してステップS13へ移行する。原点検出センサ10からキャリッジ8を検出した検出信号が出力されていない場合は、論理的な原点位置と物理的な原点位置との不一致によりキャリッジ位置異常を判定してステップS12へ移行する。
【0057】
S12、キャリッジ位置異常を判定した主制御部1は、上記電源投入時の原点検出動作と同様にして、記憶回路部17のキャリッジ位置情報を「0」に初期化して校正し、キャリッジ8の論理位置と物理位置とを同期させてステップS13へ移行する。
【0058】
S13、論理位置と物理位置との同期を認識した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを「0」に書替えて脱調検出要求をリセットする。
【0059】
S14、一方、次行の印刷動作の実行を判定した主制御部1は、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、次行への改行動作を開始してステップS15へ移行する。
【0060】
S15、改行動作の開始後に、改行動作の進行状況を監視していた主制御部1は、改行動作を終えたことを確認した場合はステップS16へ移行する。改行動作が継続中の場合は前記の監視を継続する。
【0061】
なお、原点位置確認動作を強制実行した場合は、上記ステップS13の終了前に改行動作が終了してしまう場合があるが、このときは本ステップにおいて改行動作の終了を確認してステップS16へ移行する。
【0062】
S16、改行動作の終了を認識した主制御部1は、改行量累計算出部22によって、前回の原点位置確認動作からの累積改行量に今回の改行動作における改行量を加えて累積改行量を更新し、更新した累積改行量と、記憶回路部17のメモリに格納されている判定改行量Ksとを比較し、更新した累積改行量が判定改行量Ksを超えている場合はステップS17へ移行する。更新した累積改行量が判定改行量Ks以下の場合は、次行の印刷動作の開始を判定してステップS18へ移行する。
【0063】
なお、累積改行量の累計は、改ページ動作を実行した場合も同様にして更新される。
【0064】
S17、累積改行量が判定改行量Ksを超えていることを判定した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを脱調検出が必要であることを示す「1」に書替えて脱調検出要求を発生させ、次行の印刷動作を開始するためにステップS18へ移行する。
【0065】
S18、次行の印刷動作の開始を判定した主制御部1は、キャリッジ制御部4によってスペースモータ6へパルスを供給し、キャリッジ8を主走査方向に移動させながら、キャリッジ8に搭載された印刷ヘッド5によって、印刷制御部21から供給された印刷データを用紙P上に印刷する印刷動作を開始する。
【0066】
このようにして、本実施例の原点位置確認処理が実行される。
【0067】
上記のように、本実施例の原点位置確認動作においては、次行への改行動作と同時にキャリッジ8を原点検出センサ10の位置まで移動させて原点位置の確認を行うので、改行後にキャリッジ8を原点位置センサまで移動させて原点位置を確認する場合に較べて、原点位置確認動作に要する時間を、キャリッジ8の現在位置から原点位置までのキャリッジ移動時間分短縮することができ、印刷処理における処理効率を向上させることができる。
【0068】
また、印刷終了後のキャリッジ8の現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ移動時間Bと、原点位置から次行の印刷開始位置までのキャリッジ移動時間Cとの和が、次行への改行時間Aより短い場合に、次行への改行動作と同時に原点位置確認動作をおこなうので、改行動作の間に原点位置の確認を終えることができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【0069】
なお、本実施例においては、判定改行量Ksは記憶回路部17に予め格納しておくとして説明したが、操作パネル18のメニュー画面から入力して設定するようにしてもよく、プログラム内に固定値として設定するようにしてもよい。
【0070】
以上説明したように、本実施例では、印刷終了後のキャリッジ位置から原点検出センサまでのキャリッジ移動時間と、原点検出センサから次の印刷開始位置までのキャリッジ移動時間との和が、印刷終了後から次の印刷位置まで用紙の搬送時間より短い場合に、原点検出センサによるキャリッジの原点位置確認動作を行うようにしたことによって、次行への改行動作の間に原点位置の確認を終えることができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【実施例2】
【0071】
本実施例の説明においては、上記実施例1と同様の部分は、同一の符号を付してその説明を省略する。
【0072】
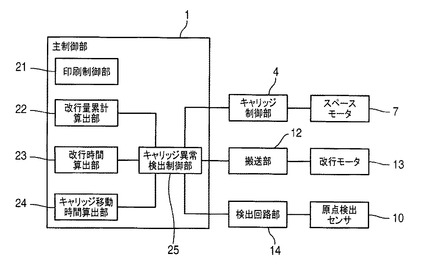
本実施例の主制御部1には、図7に示すように、印刷動作における減速開始位置(図4参照)を変更する機能を有する減速開始位置変更部31が形成されている。
【0073】
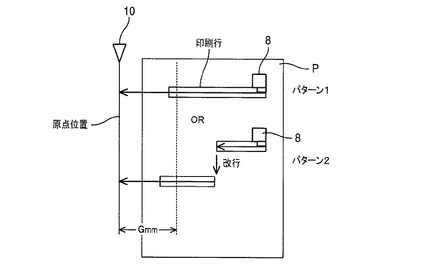
また、主制御部1に形成された位置制御部としてのキャリッジ異常検出制御部25は、改行量累計算出部22による脱調検出要求が発生している場合に、キャリッジ制御部4のスペースモータ6によるキャリッジ8の移動方向が原点検出センサ10が設けられた原点位置へ向かう方向であって、印刷終了後の減速開始位置が原点位置から所定の距離G(単位:mm)以下の場合に、原点位置確認動作の実行を可能と判定し、減速開始位置変更部31によって印刷を行っているキャリッジ8の減速開始位置を、原点位置の手前に変更してスペースモータ6により、キャリッジ8を論理的に認識している原点位置に移動させ、移動させたキャリッジ8を原点検出センサ10が検出したか否かによって、キャリッジ8の論理位置と物理位置との一致を確認し、不一致の場合にキャリッジ8を原点検出センサ10が検出した位置を原点位置として、記憶回路部17の論理的なキャリッジ位置情報を初期化して校正する原点位置確認動作を実行する機能を有している。
【0074】
なお、前記した所定の距離Gは、図8に示すように、本実施例の原点位置確認動作の実行の可否を判定するための原点位置からの距離であって、例えば用紙Pの余白領域と印刷領域との原点位置側の境界線と原点位置との主走査方向の長さと、印刷領域の主走査方向の長さの1/4程度の長さとを加えた距離に設定され、記憶回路部17のメモリに予め格納されている。
【0075】
本実施例の原点位置確認処理は、印刷動作におけるキャリッジ8の移動動作を止めずに、そのまま原点位置まで移動させて、原点位置確認動作に要する時間の短縮を図るものである。
【0076】
つまり、上記実施例1における原点位置確認処理においては、ステップS1において印刷動作を終了した後に、所定の条件下で原点位置確認動作を開始する。この場合には、図4に示すように、キャリッジ8を減速させて一旦停止させ、原点位置確認動作の開始時にキャリッジ8を加速して定速移動の後に再び減速させて原点位置に停止させているが、本実施例の原点位置確認処理においては、印刷動作の終了時の減速と、原点位置確認動作の開始時の加速とを省略して、そのまま原点位置へ定速移動させ、原点位置確認動作に要する時間の短縮を図るものである。
【0077】
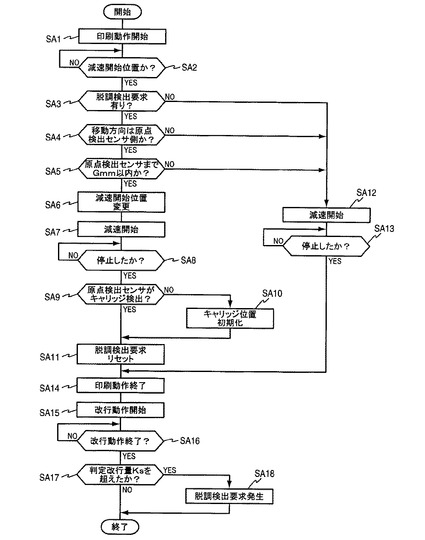
以下に、図9にSAで示すステップに従って、本実施例の原点位置確認処理について説明する。
【0078】
印刷装置へ電源が投入されると、上記実施例1と同様にして、主制御部1は電源投入時の初期動作を実行し、原点検出動作により原点位置を認識して記憶回路部17のキャリッジ位置情報を初期化して校正し、キャリッジ8の物理位置と論理位置とを同期させ、上位装置からの印刷指示情報を受信したときに印刷動作を開始する。
【0079】
SA1、印刷動作を開始した主制御部1は、印刷制御部21で生成した印刷データをキャリッジ制御部4へ送り、キャリッジ制御部4によってキャリッジ8を移動させながら用紙P上に1行分の印刷を行う1行分の印刷動作を開始する。
【0080】
SA2、当該行の印刷を開始した主制御部1は、キャリッジ制御部4によって、キャリッジ8が減速開始位置まで移動するのを監視し、キャリッジ8がその行の印刷を終えて減速開始位置に達したときにステップSA3へ移行する。キャリッジ8が減速開始位置に達しない場合は、前記の監視を継続する。
【0081】
SA3、キャリッジ8が減速開始位置に達したことを認識した主制御部1は、上記実施例1のステップS2と同様にして、記憶回路部17のメモリを確認して脱調検出要求の存否を確認し、脱調検出要求が発生している場合はステップSA4へ移行する。脱調検出要求が発生していない場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0082】
SA4、脱調検出要求が発生していることを認識した主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8の移動方向を確認し、キャリッジ8の移動方向が原点検出センサ10が設けられている原点位置へ向かう方向、つまり復路の印刷動作の実行中の場合はステップSA5へ移行する。キャリッジ8の移動方向が原点位置から離間する方向、つまり往路の印刷動作の実行中の場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0083】
SA5、キャリッジ8の移動方向が原点位置へ向かう方向であることことを認識した主制御部1は、キャリッジ異常検出制御部25によって、記憶回路部17に記憶されているキャリッジ位置情報を基にキャリッジ8の現在位置を認識して原点位置までの移動距離を算出し、算出した移動距離が、記憶回路部17のメモリに格納されている所定の距離G以下の場合は、原点位置確認動作の実行を判定してステップSA6へ移行する。算出した移動距離が所定の距離Gを超えている場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0084】
この場合の原点位置確認動作の実行を判定する印刷動作のパターンとしては、図8にパターン1として示すように、復路印刷における1行の印刷動作の減速開始位置が所定の距離Gより原点位置側に存在する場合や、パターン2に示すように、復路印刷における短い行の印刷動作の終了後に改行動作を行い、その位置よりも原点位置側に短い行の印刷を復路印刷によって行い、その印刷動作の減速開始位置が所定の距離Gより原点位置側に存在する場合等がある。
【0085】
SA6、原点位置確認動作の実行を判定した主制御部1は、減速開始位置変更部31によって、論理的な原点位置が減速終了位置となるように減速開始位置を変更し、これをキャリッジ異常検出制御部25へ送って、定速移動によるキャリッジ8の移動動作を継続させる。
【0086】
SA7、キャリッジ8の定速動作を継続させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8が変更した減速開始位置まで移動するのを監視し、キャリッジ8が変更した減速開始位置に達したときにキャリッジ8の減速を開始させてステップSA8へ移行する。キャリッジ8が減速開始位置に達しない場合は、前記の監視を継続する。
【0087】
SA8、キャリッジ8の減速を開始させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8の停止を監視し、キャリッジ8が減速を終えて停止したときにステップSA9へ移行する。キャリッジ8が減速中の場合は前記の監視を継続する。
【0088】
SA9、論理的な原点位置へキャリッジ8を停止させた主制御部1は、上記実施例1のステップS11と同様にして、原点検出センサ10からの検出信号によって、論理的な原点位置と物理的な原点位置との一致、不一致を確認し、一致している場合は正常と判定してステップSA11へ移行する。不一致の場合はキャリッジ位置異常を判定してステップSA10へ移行する。
【0089】
その後のステップSA10、SA11の作動は、上記実施例1のS12、S13の作動と同様であるので、その説明を省略する。
【0090】
SA12、一方、当該行の印刷動作の継続を判定した主制御部1は、キャリッジ制御部4によって、当該行の印刷動作における減速を開始する。
【0091】
SA13、キャリッジ8の減速を開始させた主制御部1は、キャリッジ制御部4によって、キャリッジ8の停止を監視し、キャリッジ8が減速を終えて当該行の印刷終了位置に停止したときにステップSA14へ移行する。キャリッジ8が減速中の場合は前記の監視を継続する。
【0092】
SA14、原点位置確認動作の実行、または当該行の印刷動作を終えた主制御部1は、1行分の印刷動作の終了を判定してステップSA15へ移行する。
【0093】
SA15、1行分の印刷動作の終了を判定した主制御部1は、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、次行への改行動作を開始する。
【0094】
SA16、改行動作の開始後に、改行動作の進行状況を監視していた主制御部1は、改行動作を終えたことを確認した場合はステップSA17へ移行する。改行動作が継続中の場合は前記の監視を継続する。
【0095】
SA17、改行動作の終了を認識した主制御部1は、上記実施例1のステップS16と同様にして、累積改行量を更新し、更新した累積改行量が判定改行量Ksを超えている場合はステップSA18へ移行する。更新した累積改行量が判定改行量Ks以下の場合は、次行の印刷動作の開始を判定してステップSA1に戻り、次行の印刷動作を開始する。
【0096】
SA18、累積改行量が判定改行量Ksを超えていることを判定した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを「1」に書替えて脱調検出要求を発生させ、ステップSA1に戻って次行の印刷動作を開始する。
【0097】
このようにして、本実施例の原点位置確認処理が実行される。
【0098】
上記のように、本実施例の原点位置確認動作においては、キャリッジ8の移動方向が、原点検出センサ10が設けられた原点位置に向かう方向であって、減速開始位置のキャリッジ8の位置から原点検出センサ10までの距離が所定の距離G以下の場合に、印刷動作におけるキャリッジ8の減速を省略して、定速移動を止めずにそのままキャリッジ8を原点検出センサ10の位置まで移動させて原点位置の確認を行うので、印刷動作におけるキャリッジの減速および再加速を省略することができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【0099】
なお、本実施例においては、原点位置確認動作における減速開始位置の変更は、キャリッジ8が減速開始位置に達したときに行うとして説明したが、印刷動作の開始前に減速開始位置が分かる場合は、予め減速開始位置を変更しておくようにしてもよい。
【0100】
以上説明したように、本実施例では、キャリッジの移動方向が原点検出センサに向かう方向であって、印刷終了後のキャリッジ位置から原点検出センサまでの距離が所定の距離G以下の場合に、キャリッジをそのまま原点位置へ移動させて、原点検出センサによる原点位置確認動作を行うようにしたことによって、原点位置確認動作に要する時間を短縮することができ、印刷処理における処理効率を向上させることができる。
【符号の説明】
【0101】
1 主制御部
2 データ通信部
4 キャリッジ制御部
5 印刷ヘッド
6 スペースモータ
8 キャリッジ
8a 突起
9 ガイド軸
10 原点検出センサ
12 搬送部
13 改行モータ
14 検出回路部
15 ペーパエンドセンサ
17 記憶回路部
18 操作パネル
21 印刷制御部
22 改行量累計算出部
23 改行時間算出部
24 キャリッジ移動時間算出部
25 キャリッジ異常検出制御部
31 減速開始位置変更部
【技術分野】
【0001】
本発明は、シリアルプリンタ等の印刷装置に関する。
【背景技術】
【0002】
シリアルプリンタにおける記録媒体への印刷は、印刷ヘッドが搭載されたキャリッジを主走査方向へ移動させながら行うのが、一般的である。
【0003】
この場合に、キャリッジを主走査方向へ移動させる手段としては、DCモータまたはステッピングモータが用いられる。
【0004】
DCモータを用いた場合、そのキャリッジの移動量は、キャリッジの移動とともに回転するスリットエンコーダから発生するパルス数によって監視され、そのパルス数をカウントすることで、キャリッジの移動量および現在位置を制御部が認識でき、キャリッジの移動に何らかの障害、例えばモータの脱調が発生した場合でもパルス数の変化によって異常を認識することができる。
【0005】
一方、ステッピングモータを用いた従来の印刷装置は、印刷ヘッドを搭載したキャリッジの原点における位置合せを、原点検出センサがキャリッジを検出するまでキャリッジを左右に移動させて行い、位置合せをした後は、ステッピングモータに供給するパルス数でキャリッジの現在位置を論理的に認識してその位置制御を行っている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭64−72875号公報(第1頁右欄3行−13行、第2図)
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述した従来の特許文献1の技術においては、原点における位置合せをした後は、ステッピングモータに供給するパルス数でキャリッジの現在位置を論理的に認識してその位置制御を行っているため、印刷中にステッピングモータに脱調が発生した場合には、論理的に認識した位置(論理位置という。)とキャリッジの物理的な位置(物理位置という。)とに相違が発生したとしても、その発生を知ることができないという問題がある。
【0008】
このため、従来の印刷装置においては、予め設定されたタイミング(数行印刷毎、改ページ毎、数ページ毎等)での印刷動作の終了後に、記録媒体を1行分搬送し、その後にキャリッジを原点検出センサの位置に移動させ、そのときの原点検出センサによる検出状態により論理位置と物理位置とのずれを認識して論理位置と物理位置とを同期させることが行われている。
【0009】
この場合に、原点位置の確認動作における動作時間は、改行に要する時間とキャリッジの原点位置センサまでの移動時間との合計時間となり、またキャリッジの移動時間は印刷終了位置により変動するため、印刷終了位置によってはキャリッジの移動時間が長くなり、原点位置の確認動作の動作時間が更に長くなって、印刷処理における処理効率が低下するという問題がある。
【0010】
本発明は、上記の問題点を解決するためになされたもので、原点位置の確認動作における動作時間を短縮する手段を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、上記課題を解決するために、印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、前記印刷ヘッドに印刷データを供給する印刷制御部と、前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部とを有し、前記位置制御部は、印刷終了後の前記キャリッジ位置から前記位置検出部まで前記キャリッジが移動する時間と、前記位置検出部から次の印刷開始位置まで前記キャリッジが移動する時間との和が、前記印刷終了後から次の印刷位置まで前記記録媒体を搬送する時間より短い場合に、前記位置検出部による前記キャリッジの原点位置確認動作を行うことを特徴とする。
【発明の効果】
【0012】
これにより、本発明は、原点位置確認動作に要する時間を短縮することができ、印刷処理における処理効率を向上させることができるという効果が得られる。
【図面の簡単な説明】
【0013】
【図1】実施例1の印刷装置の構成を示すブロック図
【図2】実施例1のキャリッジを示す説明図
【図3】実施例1の印刷装置の主制御部の構成を示すブロック図
【図4】実施例1のスペースモータの移動動作を示す説明図
【図5】実施例1のスペースモータのステップ時間を示す説明図
【図6】実施例1の原点位置確認処理を示すフローチャート
【図7】実施例2の印刷装置の主制御部の構成を示すブロック図
【図8】実施例2のキャリッジの動作を示す説明図
【図9】実施例2の原点位置確認処理を示すフローチャート
【発明を実施するための形態】
【0014】
以下に、図面を参照して本発明による印刷装置の実施例について説明する。
【実施例1】
【0015】
図1において、1は印刷装置の主制御部であり、データ通信部2を介して図示しないパーソナルコンピュータ等の上位装置から、制御データや印刷情報、制御信号等の印刷指示情報を受信し、受信した印刷指示情報の解釈やイメージバッファへの展開を行う。
【0016】
なお、データ通信部2は、上位装置からの各種データの受信や、上位装置との間で制御信号の送受信を行う。
【0017】
4はキャリッジ制御部であり、例えば印刷装置がドットプリンタである場合は、主制御部1が生成した所定のドットパターンを印刷するための複数のドットピンを備えた印刷ヘッド5、記録媒体としての用紙Pの幅方向(用紙の搬送方向の直交方向をいう)である主走査方向に印刷ヘッド5を往復移動させる、ステッピングモータからなるスペースモータ6を制御して、印刷ヘッド5を往復移動させながら、その往路および復路において用紙P上にドットパターンを印刷する機能を有している。
【0018】
なお、印刷装置がインクジェットプリンタの場合は、複数のノズルを備えた印刷ヘッド5が用いられる。
【0019】
図2において、8はキャリッジであり、ガイド軸9上を往復移動する印刷ヘッド5を搭載したユニットであって、位置検出部としての光学式の原点検出センサ10の光軸を遮断するための突起8aが設けられている。
【0020】
この原点検出センサ10は、装置本体に設けられ、キャリッジ6の移動方向の一の端部(本実施例では、搬送方向に向かって左側の端部)に設定された原点位置に設けられている。
【0021】
図1において、12は搬送部であり、用紙Pを搬送方向(主走査方向に直交する副走査方向と同じ方向。)に搬送するための改行モータ13を備えており、印刷ヘッド5により印刷された用紙Pを搬送して改行送りを行う機能を有している。
【0022】
14は検出回路部であり、用紙Pの有無を検出するペーパエンドセンサ15と、スペースモータ6により移動するキャリッジ8の位置制御の基準となる原点位置に設けられた原点検出センサ10とに電気的に接続しており、ペーパエンドセンサ15および原点検出センサ10からの検出信号を主制御部1へ出力する機能を有している。
【0023】
17は記憶部としての記憶回路部であり、主制御部1から送信される印刷データを格納したり、その印刷データを印刷するためにイメージバッファに展開したりするためのバッファメモリや、検出回路部14のペーパエンドセンサ15から出力された用紙端位置情報や、キャリッジ8の現在位置を示すキャリッジ位置情報、主制御部1が用いる各種のデータ、主制御部1による処理結果等を記憶するためのランダムアクセスメモリ、操作パネル18において選択されたセットアップモード(メニュー設定)を記憶するための不揮発性メモリ、主制御部1が実行するプログラムを格納するためのフラッシュメモリ等を備えている。
【0024】
前記のキャリッジ位置情報には、原点検出センサ10により校正された論理的な原点位置を基準に、スペースモータ6に供給した正逆方向のパルス数によって認識したキャリッジ8の倫理的な現在位置がキャリッジ8に移動の度に更新しながら記憶される。
【0025】
操作パネル18は、動作モードをセットアップするための図示しない操作キー、操作状況を表示するためのLED表示部やLEDランプ等を備えている。
【0026】
図3において、21は主制御部1に形成された印刷制御部であり、受信した印刷指示情報を基に、インパクトデータや印刷開始位置情報、印刷終了位置情報等の印刷データ等の、印刷に関る各種の情報を作成する機能、作成した印刷データ等を印刷ヘッド5へ供給する機能を有している。
【0027】
22は主制御部1に形成された改行量累計算出部であり、前回の原点位置確認動作(後述)から現在までの累積改行量を長さの単位で算出してカウントする機能、および累積改行量が記憶回路部17のメモリに格納されている予め設定された所定の改行量である判定改行量Ks(単位:インチ)を超えた場合に脱調検出要求を発生させ、これを記憶回路部17のメモリの脱調検出要求フラグの記憶エリアに脱調検出が必要であることを示すフラグ(本実施例では、発生時「1」、リセット時「0」)を記憶させる機能を有している。
【0028】
また、記憶回路部17のメモリには、原点位置確認動作を実行するための判定条件(後述)に合致しないために原点位置確認動作を実行できない期間が長くなる場合に、強制的に原点位置確認動作を実行するための改行量である上限改行量Kj(単位:インチ)が予め設定され格納されている。
【0029】
23は主制御部1に形成された改行時間算出部であり、現在行から次行までの1行分の用紙Pの搬送時間である改行時間Aを算出する機能を有している。
【0030】
24は主制御部1に形成されたキャリッジ移動時間算出部であり、キャリッジ8の現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ8の移動時間であるキャリッジ移動時間B、および原点位置から次行の印刷開始位置までのキャリッジ8の移動時間であるキャリッジ移動時間C、を算出する機能を有している。
【0031】
25は主制御部1に形成された位置制御部としてのキャリッジ異常検出制御部であり、改行量累計算出部22による脱調検出要求が発生している場合に、改行時間算出部23で算出した改行時間A、キャリッジ移動時間算出部24で算出したキャリッジ移動時間BおよびCを基に、原点位置確認動作の可否を判定し、原点位置確認動作が可能と判定した場合に、搬送部12の改行モータ13による改行動作を実行しながらキャリッジ制御部4のスペースモータ6により、キャリッジ8を論理的に認識している原点位置に移動させ、移動させたキャリッジ8を原点検出センサ10が検出したか否かによって、キャリッジ8の論理位置と物理位置との一致を確認し、不一致の場合にキャリッジ8を原点検出センサ10が検出した位置を原点位置として、記憶回路部17の論理的なキャリッジ位置情報を初期化して校正する原点位置確認動作を実行する機能を有している。
【0032】
なお、図3に示す各部を接続する実線は、原点位置確認動作の実行における情報の流れを示したものである。
【0033】
また、上記した印刷制御部21、改行量累計算出部22、改行時間算出部23、キャリッジ移動時間算出部24、キャリッジ異常検出制御部25は、主制御部1が実行するプログラムのソフトウェアにより形成された機能手段である。
【0034】
上記の改行時間算出部23による改行時間Aの算出は、本実施例の改行モータ13の1パルス当りの移動量が1/360インチ(0.07mm)となっているので、例えば改行速度が5インチ/秒の場合であって、次行までの改行量が1インチのときは、改行時間Aは0.2秒と算出される。なお改行モータ13の1パルス当りの移動量が1/432インチ(0.06mm)となっている場合も、改行速度は同じであるので、改行時間Aは同じ時間として算出される。
【0035】
また、キャリッジ移動時間算出部24によるキャリッジ移動時間Bの算出は、本実施例のスペースモータ6の1パルス当りの移動量が1/180インチ(0.14mm)となっているので、例えば移動速度が15インチ/秒の場合であって、移動量が5インチのときは、キャリッジ移動時間Bは約0.34秒と算出される。
【0036】
この場合のキャリッジ8の現在位置から目標位置までの移動は、図4に示すように、加速領域と定速領域と減速領域とで構成され、1パルス当りのステップ時間は、図5に示すように、加速領域、定速領域、減速領域でそれぞれ異なるように設定されている。
【0037】
また、加速ステップ数と減速ステップ数は、移動速度に対して固定ステップ数となるように設定されているため、目標位置までの総ステップ数が決定すれば、
加速ステップ時間=Tacc1+Tacc2+Tacc3+・・・+TaccN ・・・・・(1)
減速ステップ時間=Tdcc1+Tdcc2+Tdcc3+・・・+TdccN ・・・・・(2)
定速ステップ時間=Tth×(総ステップ数−(加速ステップ数+減速ステップ数))
・・・・・(3)
キャリッジ移動時間=加速ステップ時間+定速ステップ時間+減速ステップ時間
・・・・・(4)
で算出される。
【0038】
なお、加速ステップ時間は、Tacc1、Tacc2、Tacc3・・・TaccNの順に短いステップ時間になるように設定され、減速ステップ時間はTdcc1、Tdcc2、Tdcc3・・・TdccNの順に長いステップ時間となるように設定されている。
【0039】
以下に、図6にSで示すステップに従って、本実施例の原点位置確認処理について説明する。
【0040】
印刷装置へ電源が投入されると、記憶回路部17のメモリに格納されているプログラムが自動的に起動され、主制御部1は、電源投入時の初期動作を実行する。
【0041】
すなわち、主制御部1は、キャリッジ制御部4によってスペースモータ6を回転させ、キャリッジ8を主走査方向へ移動させ、原点検出センサ10がキャリッジ8を検出したときにキャリッジ8を減速させて停止させ、その検出位置を原点位置として記憶回路部17のキャリッジ位置情報を「0」に初期化して校正し、キャリッジ8の物理位置と論理位置とを同期させる原点検出動作を行い、上位装置からの印刷指示情報をデータ通信部2を介して受信したときに印刷動作を開始する。
【0042】
S1、印刷動作を開始した主制御部1は、印刷制御部21で生成した印刷データをキャリッジ制御部4へ送り、キャリッジ制御部4によってキャリッジ8を移動させながら用紙P上に1行分の印刷を行い、その行の最後まで印刷して1行分の印刷動作を終了させる。
【0043】
S2、1行分の印刷動作の終了後に、主制御部1は記憶回路部17のメモリを確認して脱調検出要求の存否を確認し、メモリの脱調検出要求フラグの記憶エリアに脱調検出が必要であることを示すフラグが記憶されている場合(ステップS17参照)は、脱調検出要求が発生していることを認識してステップS3へ移行する。メモリに脱調検出要求フラグが記憶されていない場合(ステップS13におけるリセット状態の場合)は、次行の印刷動作の実行を判定してステップS14へ移行する。
【0044】
S3、脱調検出要求が発生していることを認識した主制御部1は、改行時間算出部23によって1行分の改行時間Aを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0045】
S4、これと並行して主制御部1は、キャリッジ移動時間算出部24によって、記憶回路部17に記憶されているキャリッジ位置情報を基に1行分の印刷動作の終了後のキャリッジ8の現在位置を認識し、その現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ移動時間Bを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0046】
S5、また、主制御部1は、キャリッジ移動時間算出部24によって、原点検出センサ10が設けられた原点位置から次行の印刷開始位置までのキャリッジ移動時間Cを算出し、これをキャリッジ異常検出制御部25へ送信させる。
【0047】
このキャリッジ移動時間Cは、実際には次行の印刷動作の開始時に実行されるキャリッジ8の移動時間であるので、独立した動作ではないが、キャリッジ移動時間Cが長い場合は、次行の印刷の開始までの時間が長くなり、結果として印刷をしていない時間が増えてしまうことを防止することを目的として、これを考慮するために算出するものである。
【0048】
なお、キャリッジ移動時間Cは、次行の印刷開始位置が確定している場合にのみ算出する時間であり、次行の印刷データがない場合や、上位装置からのデータ送信が遅く次行の印刷データが確定していない場合は考慮する必要がないため「0」とみなす。
【0049】
S6、改行時間A、キャリッジ移動時間BおよびCを算出してキャリッジ異常検出制御部25へ送信させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ移動時間Bとキャリッジ移動時間Cとの和が、改行時間A未満の場合、つまり改行時間Aより短い場合は、原点位置確認動作の実行を可能と判定してステップS8へ移行する。キャリッジ移動時間Bとキャリッジ移動時間Cとの和が、改行時間A以上の場合は、原点位置確認動作の実行を不可能と判定してステップS7へ移行する。
【0050】
このようにして、キャリッジ移動時間Cを考慮した判定条件による原点位置確認動作の実行の可否が判定される。
【0051】
S7、原点位置確認動作の実行を不可能と判定した主制御部1は、改行量累計算出部22で算出した現在の累積改行量と、記憶回路部17のメモリに格納されている上限改行量Kjとを比較し、現在の累積改行量が上限改行量Kjを超えている場合は、原点位置確認動作を強制的に実行することを判定してステップS8へ移行する。現在の累積改行量が上限改行量Kj以下の場合は、次行の印刷動作の実行を判定してステップS14へ移行する。
【0052】
このように、原点位置確認動作の強制実行を行うのは、キャリッジ移動時間BとCとの和が、改行時間A以上となる印刷パターンが連続する場合に、脱調検出要求が発生していても、原点位置確認動作を長期間に亘って行うことができなくなるため、ステッピングモータの脱調が生じたか否かを強制的に確認して、それによる不具合の発生を回避するためである。
【0053】
S8、原点位置確認動作の実行を判定した、または原点位置確認動作の強制実行を判定した主制御部1は、改行量累計算出部22によって累積改行量を「0」にリセットする。
【0054】
S9、累積改行量をリセットした主制御部1は、原点検出センサ10が設けられた原点位置へのキャリッジ8の移動動作と、次行への改行動作とを同時に実行するために、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、改行動作を開始する。
【0055】
S10、これと並行して主制御部1は、キャリッジ異常検出制御部25によって、原点位置でキャリッジ8が停止するように、加減速領域を含む現在位置から原点位置までの総ステップ数を算出し、キャリッジ制御部4によって図5に示すタイムテーブルに従ったパルスをスペースモータ6へ供給して、論理的な原点位置へキャリッジ8を移動させ停止させる。
【0056】
S11、論理的な原点位置へキャリッジ8を停止させた主制御部1は、キャリッジ異常検出制御部25によって、検出回路部14から出力される原点検出センサ10からの検出信号を確認し、原点検出センサ10からキャリッジ8を検出した検出信号(図2参照)が出力されている場合は、論理的な原点位置と物理的な原点位置との一致により正常と判定してステップS13へ移行する。原点検出センサ10からキャリッジ8を検出した検出信号が出力されていない場合は、論理的な原点位置と物理的な原点位置との不一致によりキャリッジ位置異常を判定してステップS12へ移行する。
【0057】
S12、キャリッジ位置異常を判定した主制御部1は、上記電源投入時の原点検出動作と同様にして、記憶回路部17のキャリッジ位置情報を「0」に初期化して校正し、キャリッジ8の論理位置と物理位置とを同期させてステップS13へ移行する。
【0058】
S13、論理位置と物理位置との同期を認識した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを「0」に書替えて脱調検出要求をリセットする。
【0059】
S14、一方、次行の印刷動作の実行を判定した主制御部1は、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、次行への改行動作を開始してステップS15へ移行する。
【0060】
S15、改行動作の開始後に、改行動作の進行状況を監視していた主制御部1は、改行動作を終えたことを確認した場合はステップS16へ移行する。改行動作が継続中の場合は前記の監視を継続する。
【0061】
なお、原点位置確認動作を強制実行した場合は、上記ステップS13の終了前に改行動作が終了してしまう場合があるが、このときは本ステップにおいて改行動作の終了を確認してステップS16へ移行する。
【0062】
S16、改行動作の終了を認識した主制御部1は、改行量累計算出部22によって、前回の原点位置確認動作からの累積改行量に今回の改行動作における改行量を加えて累積改行量を更新し、更新した累積改行量と、記憶回路部17のメモリに格納されている判定改行量Ksとを比較し、更新した累積改行量が判定改行量Ksを超えている場合はステップS17へ移行する。更新した累積改行量が判定改行量Ks以下の場合は、次行の印刷動作の開始を判定してステップS18へ移行する。
【0063】
なお、累積改行量の累計は、改ページ動作を実行した場合も同様にして更新される。
【0064】
S17、累積改行量が判定改行量Ksを超えていることを判定した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを脱調検出が必要であることを示す「1」に書替えて脱調検出要求を発生させ、次行の印刷動作を開始するためにステップS18へ移行する。
【0065】
S18、次行の印刷動作の開始を判定した主制御部1は、キャリッジ制御部4によってスペースモータ6へパルスを供給し、キャリッジ8を主走査方向に移動させながら、キャリッジ8に搭載された印刷ヘッド5によって、印刷制御部21から供給された印刷データを用紙P上に印刷する印刷動作を開始する。
【0066】
このようにして、本実施例の原点位置確認処理が実行される。
【0067】
上記のように、本実施例の原点位置確認動作においては、次行への改行動作と同時にキャリッジ8を原点検出センサ10の位置まで移動させて原点位置の確認を行うので、改行後にキャリッジ8を原点位置センサまで移動させて原点位置を確認する場合に較べて、原点位置確認動作に要する時間を、キャリッジ8の現在位置から原点位置までのキャリッジ移動時間分短縮することができ、印刷処理における処理効率を向上させることができる。
【0068】
また、印刷終了後のキャリッジ8の現在位置から原点検出センサ10が設けられた原点位置までのキャリッジ移動時間Bと、原点位置から次行の印刷開始位置までのキャリッジ移動時間Cとの和が、次行への改行時間Aより短い場合に、次行への改行動作と同時に原点位置確認動作をおこなうので、改行動作の間に原点位置の確認を終えることができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【0069】
なお、本実施例においては、判定改行量Ksは記憶回路部17に予め格納しておくとして説明したが、操作パネル18のメニュー画面から入力して設定するようにしてもよく、プログラム内に固定値として設定するようにしてもよい。
【0070】
以上説明したように、本実施例では、印刷終了後のキャリッジ位置から原点検出センサまでのキャリッジ移動時間と、原点検出センサから次の印刷開始位置までのキャリッジ移動時間との和が、印刷終了後から次の印刷位置まで用紙の搬送時間より短い場合に、原点検出センサによるキャリッジの原点位置確認動作を行うようにしたことによって、次行への改行動作の間に原点位置の確認を終えることができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【実施例2】
【0071】
本実施例の説明においては、上記実施例1と同様の部分は、同一の符号を付してその説明を省略する。
【0072】
本実施例の主制御部1には、図7に示すように、印刷動作における減速開始位置(図4参照)を変更する機能を有する減速開始位置変更部31が形成されている。
【0073】
また、主制御部1に形成された位置制御部としてのキャリッジ異常検出制御部25は、改行量累計算出部22による脱調検出要求が発生している場合に、キャリッジ制御部4のスペースモータ6によるキャリッジ8の移動方向が原点検出センサ10が設けられた原点位置へ向かう方向であって、印刷終了後の減速開始位置が原点位置から所定の距離G(単位:mm)以下の場合に、原点位置確認動作の実行を可能と判定し、減速開始位置変更部31によって印刷を行っているキャリッジ8の減速開始位置を、原点位置の手前に変更してスペースモータ6により、キャリッジ8を論理的に認識している原点位置に移動させ、移動させたキャリッジ8を原点検出センサ10が検出したか否かによって、キャリッジ8の論理位置と物理位置との一致を確認し、不一致の場合にキャリッジ8を原点検出センサ10が検出した位置を原点位置として、記憶回路部17の論理的なキャリッジ位置情報を初期化して校正する原点位置確認動作を実行する機能を有している。
【0074】
なお、前記した所定の距離Gは、図8に示すように、本実施例の原点位置確認動作の実行の可否を判定するための原点位置からの距離であって、例えば用紙Pの余白領域と印刷領域との原点位置側の境界線と原点位置との主走査方向の長さと、印刷領域の主走査方向の長さの1/4程度の長さとを加えた距離に設定され、記憶回路部17のメモリに予め格納されている。
【0075】
本実施例の原点位置確認処理は、印刷動作におけるキャリッジ8の移動動作を止めずに、そのまま原点位置まで移動させて、原点位置確認動作に要する時間の短縮を図るものである。
【0076】
つまり、上記実施例1における原点位置確認処理においては、ステップS1において印刷動作を終了した後に、所定の条件下で原点位置確認動作を開始する。この場合には、図4に示すように、キャリッジ8を減速させて一旦停止させ、原点位置確認動作の開始時にキャリッジ8を加速して定速移動の後に再び減速させて原点位置に停止させているが、本実施例の原点位置確認処理においては、印刷動作の終了時の減速と、原点位置確認動作の開始時の加速とを省略して、そのまま原点位置へ定速移動させ、原点位置確認動作に要する時間の短縮を図るものである。
【0077】
以下に、図9にSAで示すステップに従って、本実施例の原点位置確認処理について説明する。
【0078】
印刷装置へ電源が投入されると、上記実施例1と同様にして、主制御部1は電源投入時の初期動作を実行し、原点検出動作により原点位置を認識して記憶回路部17のキャリッジ位置情報を初期化して校正し、キャリッジ8の物理位置と論理位置とを同期させ、上位装置からの印刷指示情報を受信したときに印刷動作を開始する。
【0079】
SA1、印刷動作を開始した主制御部1は、印刷制御部21で生成した印刷データをキャリッジ制御部4へ送り、キャリッジ制御部4によってキャリッジ8を移動させながら用紙P上に1行分の印刷を行う1行分の印刷動作を開始する。
【0080】
SA2、当該行の印刷を開始した主制御部1は、キャリッジ制御部4によって、キャリッジ8が減速開始位置まで移動するのを監視し、キャリッジ8がその行の印刷を終えて減速開始位置に達したときにステップSA3へ移行する。キャリッジ8が減速開始位置に達しない場合は、前記の監視を継続する。
【0081】
SA3、キャリッジ8が減速開始位置に達したことを認識した主制御部1は、上記実施例1のステップS2と同様にして、記憶回路部17のメモリを確認して脱調検出要求の存否を確認し、脱調検出要求が発生している場合はステップSA4へ移行する。脱調検出要求が発生していない場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0082】
SA4、脱調検出要求が発生していることを認識した主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8の移動方向を確認し、キャリッジ8の移動方向が原点検出センサ10が設けられている原点位置へ向かう方向、つまり復路の印刷動作の実行中の場合はステップSA5へ移行する。キャリッジ8の移動方向が原点位置から離間する方向、つまり往路の印刷動作の実行中の場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0083】
SA5、キャリッジ8の移動方向が原点位置へ向かう方向であることことを認識した主制御部1は、キャリッジ異常検出制御部25によって、記憶回路部17に記憶されているキャリッジ位置情報を基にキャリッジ8の現在位置を認識して原点位置までの移動距離を算出し、算出した移動距離が、記憶回路部17のメモリに格納されている所定の距離G以下の場合は、原点位置確認動作の実行を判定してステップSA6へ移行する。算出した移動距離が所定の距離Gを超えている場合は、当該行の印刷動作の継続を判定してステップSA12へ移行する。
【0084】
この場合の原点位置確認動作の実行を判定する印刷動作のパターンとしては、図8にパターン1として示すように、復路印刷における1行の印刷動作の減速開始位置が所定の距離Gより原点位置側に存在する場合や、パターン2に示すように、復路印刷における短い行の印刷動作の終了後に改行動作を行い、その位置よりも原点位置側に短い行の印刷を復路印刷によって行い、その印刷動作の減速開始位置が所定の距離Gより原点位置側に存在する場合等がある。
【0085】
SA6、原点位置確認動作の実行を判定した主制御部1は、減速開始位置変更部31によって、論理的な原点位置が減速終了位置となるように減速開始位置を変更し、これをキャリッジ異常検出制御部25へ送って、定速移動によるキャリッジ8の移動動作を継続させる。
【0086】
SA7、キャリッジ8の定速動作を継続させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8が変更した減速開始位置まで移動するのを監視し、キャリッジ8が変更した減速開始位置に達したときにキャリッジ8の減速を開始させてステップSA8へ移行する。キャリッジ8が減速開始位置に達しない場合は、前記の監視を継続する。
【0087】
SA8、キャリッジ8の減速を開始させた主制御部1は、キャリッジ異常検出制御部25によって、キャリッジ8の停止を監視し、キャリッジ8が減速を終えて停止したときにステップSA9へ移行する。キャリッジ8が減速中の場合は前記の監視を継続する。
【0088】
SA9、論理的な原点位置へキャリッジ8を停止させた主制御部1は、上記実施例1のステップS11と同様にして、原点検出センサ10からの検出信号によって、論理的な原点位置と物理的な原点位置との一致、不一致を確認し、一致している場合は正常と判定してステップSA11へ移行する。不一致の場合はキャリッジ位置異常を判定してステップSA10へ移行する。
【0089】
その後のステップSA10、SA11の作動は、上記実施例1のS12、S13の作動と同様であるので、その説明を省略する。
【0090】
SA12、一方、当該行の印刷動作の継続を判定した主制御部1は、キャリッジ制御部4によって、当該行の印刷動作における減速を開始する。
【0091】
SA13、キャリッジ8の減速を開始させた主制御部1は、キャリッジ制御部4によって、キャリッジ8の停止を監視し、キャリッジ8が減速を終えて当該行の印刷終了位置に停止したときにステップSA14へ移行する。キャリッジ8が減速中の場合は前記の監視を継続する。
【0092】
SA14、原点位置確認動作の実行、または当該行の印刷動作を終えた主制御部1は、1行分の印刷動作の終了を判定してステップSA15へ移行する。
【0093】
SA15、1行分の印刷動作の終了を判定した主制御部1は、搬送部12によって改行モータ13を用紙Pの搬送方向に回転させ、次行への改行動作を開始する。
【0094】
SA16、改行動作の開始後に、改行動作の進行状況を監視していた主制御部1は、改行動作を終えたことを確認した場合はステップSA17へ移行する。改行動作が継続中の場合は前記の監視を継続する。
【0095】
SA17、改行動作の終了を認識した主制御部1は、上記実施例1のステップS16と同様にして、累積改行量を更新し、更新した累積改行量が判定改行量Ksを超えている場合はステップSA18へ移行する。更新した累積改行量が判定改行量Ks以下の場合は、次行の印刷動作の開始を判定してステップSA1に戻り、次行の印刷動作を開始する。
【0096】
SA18、累積改行量が判定改行量Ksを超えていることを判定した主制御部1は、改行量累計算出部22によって、記憶回路部17のメモリの脱調検出要求フラグの記憶エリアのフラグを「1」に書替えて脱調検出要求を発生させ、ステップSA1に戻って次行の印刷動作を開始する。
【0097】
このようにして、本実施例の原点位置確認処理が実行される。
【0098】
上記のように、本実施例の原点位置確認動作においては、キャリッジ8の移動方向が、原点検出センサ10が設けられた原点位置に向かう方向であって、減速開始位置のキャリッジ8の位置から原点検出センサ10までの距離が所定の距離G以下の場合に、印刷動作におけるキャリッジ8の減速を省略して、定速移動を止めずにそのままキャリッジ8を原点検出センサ10の位置まで移動させて原点位置の確認を行うので、印刷動作におけるキャリッジの減速および再加速を省略することができ、原点位置確認動作に要する時間を短縮して、印刷処理における処理効率を向上させることができる。
【0099】
なお、本実施例においては、原点位置確認動作における減速開始位置の変更は、キャリッジ8が減速開始位置に達したときに行うとして説明したが、印刷動作の開始前に減速開始位置が分かる場合は、予め減速開始位置を変更しておくようにしてもよい。
【0100】
以上説明したように、本実施例では、キャリッジの移動方向が原点検出センサに向かう方向であって、印刷終了後のキャリッジ位置から原点検出センサまでの距離が所定の距離G以下の場合に、キャリッジをそのまま原点位置へ移動させて、原点検出センサによる原点位置確認動作を行うようにしたことによって、原点位置確認動作に要する時間を短縮することができ、印刷処理における処理効率を向上させることができる。
【符号の説明】
【0101】
1 主制御部
2 データ通信部
4 キャリッジ制御部
5 印刷ヘッド
6 スペースモータ
8 キャリッジ
8a 突起
9 ガイド軸
10 原点検出センサ
12 搬送部
13 改行モータ
14 検出回路部
15 ペーパエンドセンサ
17 記憶回路部
18 操作パネル
21 印刷制御部
22 改行量累計算出部
23 改行時間算出部
24 キャリッジ移動時間算出部
25 キャリッジ異常検出制御部
31 減速開始位置変更部
【特許請求の範囲】
【請求項1】
印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、
前記印刷ヘッドに印刷データを供給する印刷制御部と、
前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、
前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、
前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部と、を有し、
前記位置制御部は、印刷終了後の前記キャリッジ位置から前記位置検出部まで前記キャリッジが移動する時間と、前記位置検出部から次の印刷開始位置まで前記キャリッジが移動する時間との和が、前記印刷終了後から次の印刷位置まで前記記録媒体を搬送する時間より短い場合に、前記位置検出部による前記キャリッジの原点位置確認動作を行うことを特徴とする印刷装置。
【請求項2】
印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、
前記印刷ヘッドに印刷データを供給する印刷制御部と、
前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、
前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、
前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部と、を有し、
前記位置制御部は、前記キャリッジの移動方向が前記位置検出部に向かう方向であって、印刷終了後の前記キャリッジ位置から前記位置検出部までの距離が所定の距離以下の場合に、前記キャリッジを前記移動方向にそのまま移動させて、前記位置検出部による原点位置確認動作を行うことを特徴とする印刷装置。
【請求項1】
印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、
前記印刷ヘッドに印刷データを供給する印刷制御部と、
前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、
前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、
前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部と、を有し、
前記位置制御部は、印刷終了後の前記キャリッジ位置から前記位置検出部まで前記キャリッジが移動する時間と、前記位置検出部から次の印刷開始位置まで前記キャリッジが移動する時間との和が、前記印刷終了後から次の印刷位置まで前記記録媒体を搬送する時間より短い場合に、前記位置検出部による前記キャリッジの原点位置確認動作を行うことを特徴とする印刷装置。
【請求項2】
印刷ヘッドが搭載されたキャリッジを主走査方向に往復移動させるキャリッジ制御部と、
前記印刷ヘッドに印刷データを供給する印刷制御部と、
前記印刷ヘッドにより印刷された記録媒体を搬送する搬送部と、
前記キャリッジの移動方向の一の端部に設定された原点位置に設けられた位置検出部と、
前記位置検出部により前記キャリッジの原点位置の確認を行う位置制御部と、を有し、
前記位置制御部は、前記キャリッジの移動方向が前記位置検出部に向かう方向であって、印刷終了後の前記キャリッジ位置から前記位置検出部までの距離が所定の距離以下の場合に、前記キャリッジを前記移動方向にそのまま移動させて、前記位置検出部による原点位置確認動作を行うことを特徴とする印刷装置。
【図1】


【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−56794(P2011−56794A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−209080(P2009−209080)
【出願日】平成21年9月10日(2009.9.10)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月10日(2009.9.10)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
[ Back to top ]