
印刷装置
【課題】挿入された用紙が厚紙であってもその用紙を確実に給紙できるようにする。
【解決手段】突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、前記突き当てローラの回転量を制御する制御手段とを有し、前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更するようにした。
【解決手段】突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、前記突き当てローラの回転量を制御する制御手段とを有し、前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更するようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、媒体の斜行を補正するとともに斜行が補正された該媒体を搬送する印刷装置に関する。
【背景技術】
【0002】
従来の印刷装置は、用紙吸入口に設けられたゴムローラの回転により挿入された用紙の先端を装置内部の用紙搬送ローラに突き当てて斜行を補正した後、その用紙搬送ローラを回転させて挿入された用紙を給紙するようにしているものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−193492号公報(段落「0029」〜段落「0036」、図8、図10)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の技術においては、挿入された用紙が厚紙(複写紙を含む)である場合、斜行補正後に用紙搬送ローラを回転させて用紙を装置の内部へ引き込む給紙動作において、その用紙搬送ローラと用紙との間のスリップにより装置内部に用紙を引き込むことができない給紙エラーが発生する場合があるという問題がある。
【0005】
本発明は、このような問題を解決することを課題とし、挿入された用紙が厚紙であってもその用紙を確実に給紙できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
そのため、本発明は、突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、前記突き当てローラの回転量を制御する制御手段とを有し、前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更することを特徴とする。
【発明の効果】
【0007】
このようにした本発明は、挿入された用紙が厚紙であってもその用紙を確実に給紙できるという効果が得られる。
【図面の簡単な説明】
【0008】
【図1】第1の実施例における印刷装置の説明図
【図2】第1の実施例におけるスキュー補正ローラおよびスリット板の説明図
【図3】第1の実施例におけるスキュー補正ローラの停止位置の説明図
【図4】第1の実施例における印刷装置の構成を示すブロック図
【図5】第1の実施例における電源投入処理を示すフローチャート
【図6】第1の実施例における給紙処理を示すフローチャート
【図7】第1の実施例における給紙動作を示す説明図
【図8】第1の実施例における給紙動作を示す説明図
【図9】第2の実施例における印刷装置の構成を示すブロック図
【図10】第2の実施例におけるローカルテスト起動処理を示すフローチャート
【図11】第2の実施例におけるローカルテストの給紙処理を示すフローチャート
【図12】第3の実施例における印刷装置の構成を示すブロック図
【図13】第3の実施例におけるスキューローラ回転停止位置テーブルの説明図
【図14】第3の実施例におけるギャップ設定チェック処理を示すフローチャート
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明による印刷装置の実施例を説明する。
【実施例1】
【0010】
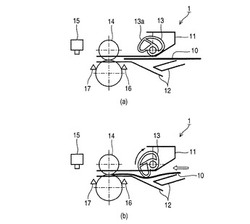
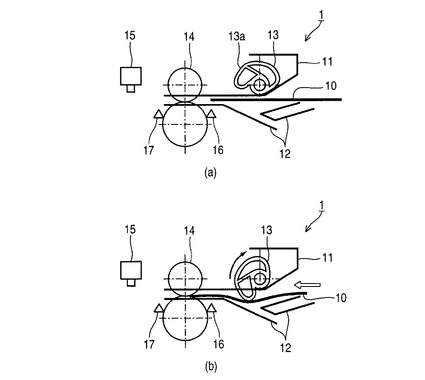
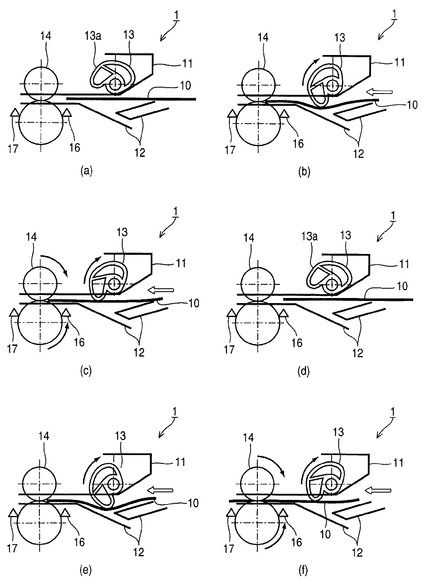
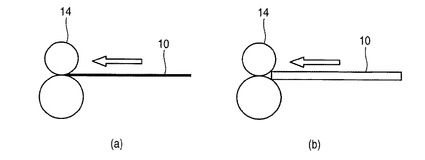
図1は第1の実施例における印刷装置の説明図であり、図1(a)は媒体としての用紙が挿入されるときの状態を示し、図1(b)は用紙を搬送している状態を示している。
【0011】
図1において、1は印刷装置であり、挿入された用紙10を給紙し、給紙した用紙10に文字等を印刷するものである。
【0012】
11はアッパーガイド、12はロワーガイドであり、ロワーガイド12の上方にアッパーガイド11が配置され、ロワーガイド12とアッパーガイド11の間に用紙10を案内し、用紙10の挿入口および搬送路を形成している。
【0013】
13は突き当てローラとしてのスキューローラであり、挿入された用紙10を搬送して後述するフィードローラ対14に突き当て、その用紙10の斜行(以下、「スキュー」という。)を補正するためのローラであり、ロワーガイド12およびアッパーガイド11で形成される用紙10の挿入口に配設され、回転軸方向に所定の間隔を保持して配設された複数のローラからなるものである。
【0014】
それぞれのスキューローラ13には、略D字状の扇状部13aが形成され、図1(b)に示すように図中矢印で示す方向に回転する扇状部13aで挿入された用紙10に接触してその用紙10を搬送する。一方、扇状部13aが形成されていない部位であるスキューローラ13の平坦部は、図1(a)に示すように用紙10の搬送に寄与しないようになっている。
【0015】
また、それぞれのスキューローラ13に対応するようにロワーガイド12に凹部が形成され、回転するスキューローラ13の扇状部13aに用紙10を接触させて搬送できるようになっている。
【0016】
なお、スキューローラ13は、図示しない駆動手段としてのスキューモータの回転駆動により回転する。
【0017】
14は、フィードローラ対であり、スキューローラ13の扇状部13aにより搬送された用紙10を挟持して搬送するローラ対である。このフィードローラ対14は、スキューローラ13の下流の搬送路に、互いに周面を接触させて配設されている。また、フィードローラ対14は、回転軸方向に所定の間隔を保持して配設された複数のローラ対からなるものであり、スキューローラ13に対応する位置に配設されている。
【0018】
挿入口に挿入された用紙10がスキューしている場合、その用紙10の搬送に伴って用紙10の前端がフィードローラ対14を構成する各ローラのうち、所定のローラ、例えば挿入口の左端のローラに突き当たる。このとき、左端のフィードローラ対14と左端のスキューローラ13は対応する位置に配設されているので、用紙10の前端が左端のフィードローラ対14に突き当たると用紙10に対して左端のスキューローラ13はスリップして左端のスキューローラ13による用紙10の搬送は行われない。
【0019】
その後、他のスキューローラ13は、それ以降も用紙10の搬送を継続するため、用紙10の前端が左側のフィードローラ対14から右側のフィードローラ対14に順次突き当たり、用紙10に対してスキューローラ13がそれぞれスリップしてスキューローラ13による用紙10の搬送が行われなくなり、発生した用紙10のスキューが補正されて取り除かれる。
【0020】
なお、スキューローラ13は、フィードローラ対14に突き当たった用紙10に対して十分にスリップするように柔軟なゴム材料によって形成されている。
【0021】
また、フィードローラ対14は、図示しない駆動手段としてのラインフィード(LF)モータの回転駆動により回転する。
【0022】
15は印字ヘッドであり、フィードローラ対14で搬送された用紙10に文字等を印刷するものである。この印字ヘッド15で印刷された用紙10は、フィードローラ対14により装置前面または図示しない搬送ローラにより装置背面へ排出される。
【0023】
16はテーブルセンサであり、光学式のセンサ等で構成され、フィードローラ対14の上流にフィードローラ対14の回転軸に平行する方向に複数(例えば10個程度)配設されたセンサである。この複数のテーブルセンサ16のうち、いずれかのテーブルセンサ16で用紙10を検知することにより挿入口に用紙10が挿入されたことを検知し、また複数のテーブルセンサ16で用紙10を検知することによりスキューが補正されたことを検知する。
【0024】
17は媒体検知手段としての搬送センサであり、フィードローラ対14で搬送された用紙10を検知するための光学式のセンサ等で構成されたものである。
【0025】
次に、スキューローラ13を図2の第1の実施例におけるスキュー補正ローラおよびスリット板の説明図、図3の第1の実施例におけるスキュー補正ローラの停止位置の説明図に基づいて説明する。
【0026】
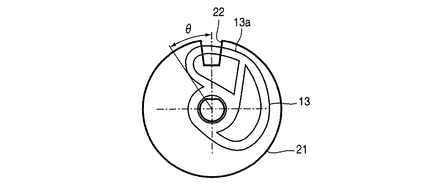
図2において、21はスリット板であり、一部に切り欠き部22が形成された板である。このスリット板21は、スキューローラ13の回転軸に取り付けられスキューローラ13の回転とともに回転し、図3に示す光学式センサ等で構成されたスリットセンサ30により切り欠き部22を検知してスキューローラ13の扇状部13aの位置を制御するためのものである。
【0027】
スリット板21の切り欠き部22は、スキューローラ13の扇状部13aの一端部と所定の角θを成すようにスキューローラ13の回転軸に取り付けられている。したがって、センサにより切り欠き部22の端部を検知してからのスキューローラ13の回転角を制御することにより、スキューローラ13の扇状部13aの位置を制御することができるようになっている。
【0028】
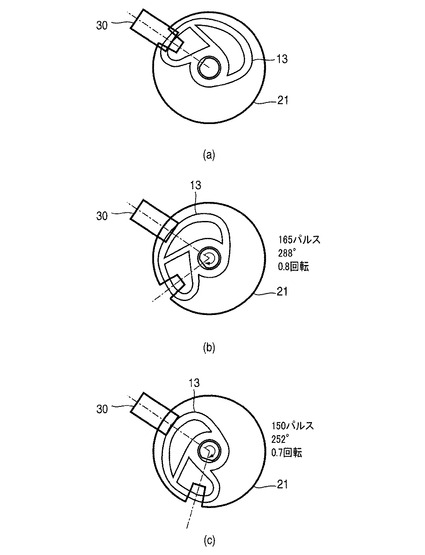
図3(a)はスキューローラ13の扇状部13aのホームポジション(初期位置)、図3(b)はスキューローラ13の扇状部13aの停止位置1、図3(c)はスキューローラ13の扇状部13aの停止位置2を示した例である。
【0029】
図3(a)に示す扇状部13aのホームポジション(初期位置)は、スリット板21の切り欠き部22をスリットセンサ30で検知したときに停止させた位置であり、図3(b)に示すスキューローラ13の扇状部13aの停止位置1は、スリット板21の切り欠き部22をスリットセンサ30で検知した初期位置からスキューローラ13に165パルスを付与して0.8回転(288度回転)させて停止させた位置であり、図3(c)に示すスキューローラ13の扇状部13aの停止位置2は、スリット板21の切り欠き部22をスリットセンサ30で検知した初期位置からスキューローラ13に150パルスを付与して0.7回転(252度回転)させて停止させた位置である。
【0030】
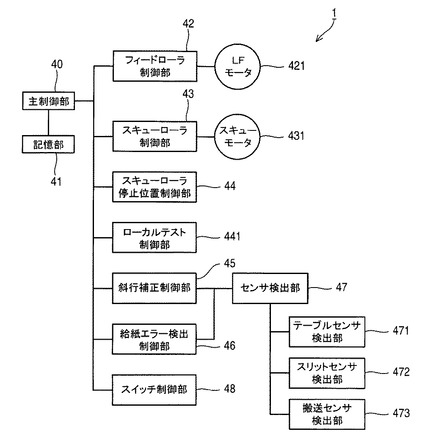
図4は第1の実施例における印刷装置の構成を示すブロック図である。
【0031】
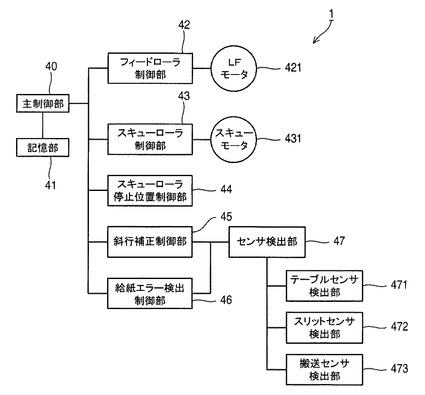
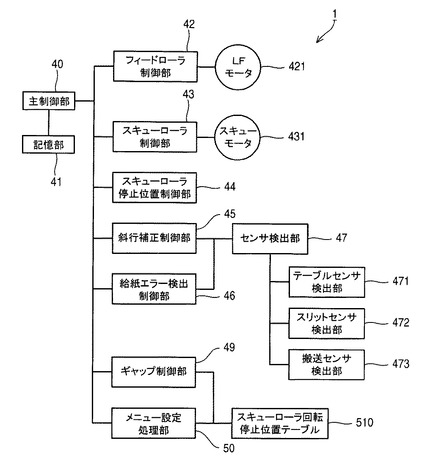
図4において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472および搬送センサ検出部473から構成されている。
【0032】
主制御部40は、CPU(Central Processing Unit)等の中央処理演算装置であり、メモリ等の記憶部41に記憶された制御プログラム(ソフトウェア)に基づいて印刷装置1全体の動作を制御する。
【0033】
フィードローラ制御部42は、LFモータ421を回転駆動させて図1におけるフィードローラ対14の回転を制御し、用紙10の搬送および停止位置を制御する。
【0034】
スキューローラ制御部43は、スキューモータ431を回転駆動させて図1におけるスキューローラ13の回転を制御する。
【0035】
スキューローラ停止位置制御部44は、回転駆動されたスキューモータ431の停止位置を制御し、スキューローラ制御部43と協調して用紙10を給紙する給紙動作時の用紙10のスキューの補正および用紙10の搬送を補助する制御を行う。
【0036】
なお、スキューモータ431はステッピングモータ等の回転量を制御することができるモータで構成され、本実施例ではスキューモータ431に付与するパルス数を制御することにより、回転量を制御してスキューローラ13の扇状部13aの停止位置を制御することができるようになっている。
【0037】
センサ検出部47は、図1におけるテーブルセンサ16の出力信号を検出するテーブルセンサ検出部471、図2におけるスリットセンサ30の出力信号を検出するスリットセンサ検出部472および図1における搬送センサ17の出力信号を検出する搬送センサ検出部473を備え、検出したそれぞれのセンサの出力信号をデジタル信号に変換して出力する。
【0038】
斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10が挿入口に挿入されたことを検知するとともにその用紙10の斜行状態を確認し、またセンサ検出部47から入力したスリットセンサ30の出力信号に基づいてスキューローラ13の扇状部の回転位置を検知し、スキューローラ制御部43に対してスキューローラ13の回転動作の開始/停止等の指示を行う。
【0039】
給紙エラー検出制御部46は、センサ検出部47から入力した搬送センサ17の出力信号に基づいて所定の時間が経過しても用紙10を搬送センサ17の位置まで給紙することができなかった給紙エラー(搬送異常)を検知する。なお、主制御部40は、時間の経過を計測する計時手段を備えているものとする。
【0040】
上述した構成の作用について説明する。
【0041】
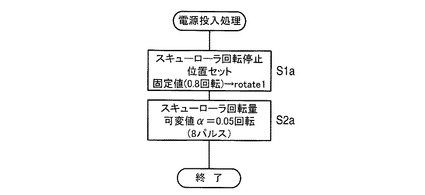
まず、印刷装置の電源投入処理を図5の第1の実施例における電源投入処理を示すフローチャートの図中Sで表すステップにしたがって図4を参照しながら説明する。なお、本実施例では用紙を単票として説明する。
【0042】
S1a:印刷装置1の電源が投入されると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate1に格納する。
【0043】
S2a:また、主制御部40は、スキューローラ13の回転量の可変値として所定の回転数(例えば、0.05回転(8パルス相当))を記憶部41の変数αに格納する。
【0044】
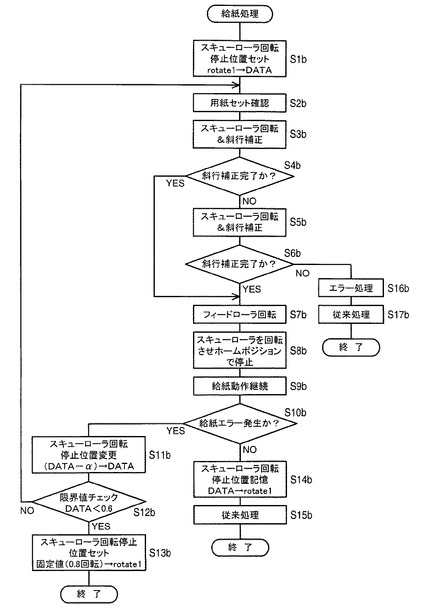
次に、印刷装置が行う給紙処理を図6の第1の実施例における給紙処理を示すフローチャートの図中Sで表すステップにしたがって図7の第1の実施例における給紙動作を示す説明図および図4を参照しながら説明する。
【0045】
図7(a)に示すように単票手差し挿入口に用紙10が挿入されるとテーブルセンサ16が紙ありを検知するが、例えば隣り合う2個以上のテーブルセンサ16が紙ありを検知したとき、主制御部40は用紙10のスキュー補正を開始する。
【0046】
S1b:まず、主制御部40は、記憶部41の変数rotate1に格納されているスキューローラ13の回転停止位置の値を記憶部41に記憶される変数DATAに代入する。
【0047】
S2b:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10がセットされている状態を確認する。
【0048】
S3b:制御手段としてのスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転、停止させてスキュー補正動作を行う。
【0049】
S4b:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7bへ移行し、一方未完了と判定すると処理をS5bへ移行する。
【0050】
ここで、本実施例では、斜行補正制御部45は、連続する3個以上のテーブルセンサ16が紙ありを検知したとき、スキュー補正が完了したと判定するものとする。
【0051】
S5b:スキュー補正が未完了、すなわち不完全と判定するとスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転させ、停止させるスキュー補正動作を再度行う。
【0052】
S6b:斜行補正制御部45は、S4bと同様に、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7bへ移行し、一方未完了と判定すると従来のスキュー補正のエラー処理(S16b、S17b)を行う。
【0053】
S7b:スキュー補正が完了するとフィードローラ制御部42は、LFモータ421を回転駆動させてフィードローラ対14を回転させ、用紙10を搬送する。
【0054】
S8b:S7bと同時に、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させる。
【0055】
S9b:スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させ、フィードローラ対14に押し付けられている用紙10の搬送を補助しながら給紙動作を継続する。なお、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させるとそのスキューローラ13を停止する。
【0056】
S10b:用紙10の給紙動作において、給紙エラー検出制御部46が給紙エラーを検知すると処理をS11bへ移行し、一方給紙エラーを検知しなかったときは処理をS14bへ移行する。なお、給紙エラー検出制御部46は、S7bにおいてフィードローラ対14の回転を開始したときから所定の時間が経過しても用紙10を搬送センサ17で紙ありを検知することができなかった場合、給紙エラーを検知する。
【0057】
S11b:主制御部40は、スキューローラ13の回転停止位置が格納されている変数DATAから、図5におけるS2aで格納したスキューローラ13の回転量の可変値として記憶部41に記憶した変数αを減算し、変数DATAのスキューローラ13の回転停止位置の値を変更する。これにより、S3bにおけるスキューローラ13の回転量を減らし、S8bにおけるスキューローラ13の回転量を増やして用紙10の搬送距離を長くすることができる。
【0058】
S12b:主制御部40は、変数DATAのスキューローラ13の回転停止位置の値を変更した結果、その変数DATAが限界値(例えば、0.6回転)を超えて小さい値となっているかを判定し、限界値を超えていないと判定した場合、処理をS2bへ移行し、引き続き給紙処理を継続する。一方、限界値を超えて小さい値となっていると判定した場合、処理をS13bへ移行する。
【0059】
なお、本実施例で限界値を設けているのは、スキューローラ13の回転量を減らし過ぎると用紙10のスキューを取り除くことができなくなるからである。
【0060】
S13b:限界値を超えていると判定すると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate1に格納し、給紙エラーとして給紙処理を終了する。
【0061】
S14b:S9bの用紙10の給紙動作において、給紙エラーを検知することなく正常に給紙できた場合、主制御部40は、スキューローラ13の回転停止位置の値としての変数DATAを記憶部41の変数rotate1に格納し、給紙処理を終了する。このように、変数DATAを記憶部41の変数rotate1に格納することにより、次回の給紙動作において、給紙エラーとならないスキューローラ13の回転停止位置の値を利用することができるようになる。
【0062】
S15b:給紙処理を終了すると主制御部40は、従来処理としての印字動作を行う。
【0063】
このようにして印刷装置は給紙処理を行う。
【0064】
次に、上述した給紙処理で給紙エラーが発生したときの再給紙動作を図7に基づいて説明する。
【0065】
図7(a)に示すように隣り合う2個以上のテーブルセンサ16が紙ありを検知して用紙10が単票手差し挿入口に挿入されたことを検知する。
【0066】
図7(b)に示すようにスキューローラ13を図中矢印が示す方向へ0.8回転させ、図3(b)に示す停止位置1で停止させる(図6におけるS3b)。スキューローラ13の回転により、用紙10のスキューが補正され、用紙10がフィードローラ対14に押し当てられる。スキューローラ13を停止位置1に停止させることにより、次にスキューローラ13を回転させるときに用紙10の搬送距離を確保し、用紙10のフィードローラ対14への押し込み力が大きくなるようにする。
【0067】
図7(c)に示すように図中矢印が示す方向へスキューローラ13とフィードローラ対14を同時に回転させ、用紙10を給紙する(図6におけるS7b、S8b)。
【0068】
このとき、図7(d)に示すように用紙10の先端がフィードローラ対14への噛み込みが不十分で用紙10がスリップして給紙エラーが発生するものと仮定する(図6におけるS10b)。
【0069】
給紙エラーが発生すると図7(e)に示すようにスキューローラ13を図中矢印が示す方向へ0.7回転(図7(b)と比較して回転量が0.1回転減少)させ、図3(c)に示す停止位置2で停止させる(図6におけるS3b)。スキューローラ13の回転により、用紙10のスキューが補正され、用紙10がフィードローラ対14に押し当てられる。スキューローラ13を停止位置2に停止させることにより、次にスキューローラ13を回転させるときに用紙10の搬送距離をさらに確保し、用紙10のフィードローラ対14への押し込み力が大きくなるようにする。
【0070】
したがって、図7(b)のスキューローラ13の停止位置1と比較して図7(e)のスキューローラ13の停止位置2では、給紙動作におけるスキューローラ13の回転量が増加し、用紙10の搬送距離が長くなり、用紙10のフィードローラ対14への押し込み力が大きくなる。
【0071】
図7(f)に示すように図中矢印が示す方向へスキューローラ13とフィードローラ対14を同時に回転させ、用紙10を給紙し(図6におけるS7b、S8b)、搬送センサ17で用紙10を検知して正常に給紙されたことを検知する。
【0072】
このように給紙エラーを検知した後の再給紙動作においてスキューローラ13の回転量を増加させることにより、用紙10の搬送距離を長くすることができるとともにフィードローラ対14への押し込み力を大きくすることができ、フィードローラ対14への噛み込みが良化し、給紙エラーの発生を抑えることができる。
【0073】
従来の制御では、図8(a)に示すように用紙10が薄い場合、フィードローラ対14に噛み込み易く、給紙動作において給紙エラーは発生し難いが、図8(b)に示すように用紙10が厚い場合、フィードローラ対14に噛み込み難く、給紙動作において給紙エラーが発生し易かった。
【0074】
本実施例のように、スキュー補正動作におけるスキューローラ13の回転停止位置を変更し、スキュー補正動作の後に行う給紙動作におけるスキューローラ13の回転量を増加させ、用紙10の搬送距離を長くしてフィードローラ対14への押し込み力を大きくすることにより、用紙10が厚い場合であってもフィードローラ対14に確実に噛み込ませることができ、給紙エラーの発生を防止、抑制することができる。
【0075】
以上説明したように、第1の実施例では、スキュー補正動作におけるスキューローラの回転停止位置を変更し、スキュー補正動作の後に行う給紙動作におけるスキューローラの回転量を増加させ、用紙の搬送距離を長くしてフィードローラ対への押し込み力を大きくすることにより、用紙が厚い場合であってもフィードローラ対に確実に噛み込ませることができ、給紙エラーの発生を防止、抑制して確実に給紙することができるという効果が得られる。
【実施例2】
【0076】
第2の実施例の構成は、第1の実施例の構成に、使用する用紙を給紙して予め給紙エラーが発生しない適正なスキューローラの停止位置を決定するための自己診断機能(以下、「ローカルテスト」という。)を備えたものである。
【0077】
図9は第2の実施例における印刷装置の構成を示すブロック図である。なお、上述した第1の実施例と同様の部分は、同一の符号を付してその説明を省略する。
【0078】
図9において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、ローカルテスト制御部441、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472、搬送センサ検出部473、およびスイッチ制御部48から構成されている。
【0079】
自己診断手段としてのローカルテスト制御部441は、保守用に準備されたローカルテストを実行するものである。
【0080】
スイッチ制御部48は、印刷装置1に設けられた入力手段としてのスイッチの押下を検知し、ローカルテストを含む各スイッチの機能を起動、実行させるものである。
【0081】
上述した構成の作用について説明する。
【0082】
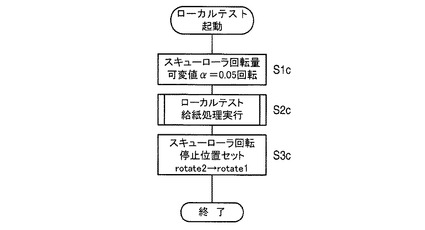
まず、印刷装置のローカルテスト起動処理を図10の第2の実施例におけるローカルテスト起動処理を示すフローチャートの図中Sで表すステップにしたがって図9を参照しながら説明する。なお、本実施例も用紙を単票として説明する。
【0083】
印刷装置1の電源投入時にローカルテストを起動するスイッチが押下されていることをスイッチ制御部48が検知するとローカルテスト制御部441は、ローカルテストを起動してローカルテストモードへ移行する。
【0084】
S1c:ローカルテストが起動されると主制御部40は、スキューローラ13の回転量の可変値として所定の回転数(例えば、0.05回転(8パルス相当))を記憶部41の変数αに格納する。
【0085】
S2c:ローカルテスト制御部441は、適正なスキューローラ13の停止位置を認識するためのローカルテストの給紙処理を行う。なお、このローカルテストの給紙処理の内容は後述する。
【0086】
S3c:主制御部40は、ローカルテストの給紙処理で導出したスキューローラ13の回転停止位置の値としての記憶部41に記憶された変数rotate2を記憶部41の変数rotate1に格納し、初期値として保存する。以降、ローカルテストモードを終了した後の通常の運用モードでは記憶部41に格納された変数rotate1に基づいて給紙処理が行われる。
【0087】
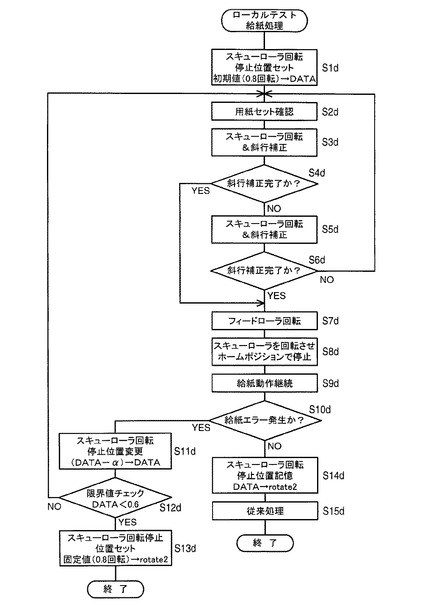
次に、印刷装置が行うローカルテストの給紙処理を図11の第2の実施例におけるローカルテストの給紙処理を示すフローチャートの図中Sで表すステップにしたがって図7および図9を参照しながら説明する。
【0088】
図7(a)に示すように単票手差し挿入口に用紙10が挿入されるとテーブルセンサ16が紙ありを検知するが、例えば隣り合う2個以上のテーブルセンサ16が紙ありを検知したとき、主制御部40は用紙10のスキュー補正を開始する。
【0089】
S1d:まず、主制御部40は、スキューローラ13の回転停止位置の初期値としての固定値(本実施例では、0.8回転)を記憶部41に記憶される変数DATAに代入する。
【0090】
S2d:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10がセットされている状態を確認する。
【0091】
S3d:制御手段としてのスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転、停止させてスキュー補正動作を行う。
【0092】
S4d:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7dへ移行し、一方未完了と判定すると処理をS5dへ移行する。
【0093】
ここで、本実施例では、斜行補正制御部45は、連続する3個以上のテーブルセンサ16が紙ありを検知したとき、スキュー補正が完了したと判定するものとする。
【0094】
S5d:スキュー補正が未完了、すなわち不完全と判定するとスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転させ、停止させるスキュー補正動作を再度行う。
【0095】
S6d:斜行補正制御部45は、S4dと同様に、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7dへ移行し、一方未完了と判定すると処理をS2dへ移行し、スキュー補正動作のリトライを行う。
【0096】
S7d:スキュー補正が完了するとフィードローラ制御部42は、LFモータ421を回転駆動させてフィードローラ対14を回転させ、用紙10を搬送する。
【0097】
S8d:S7dと同時に、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させる。
【0098】
S9d:スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させ、フィードローラ対14に押し付けられている用紙10の搬送を補助しながら給紙動作を継続する。なお、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させるとそのスキューローラ13を停止する。
【0099】
S10d:用紙10の給紙動作において、給紙エラー検出制御部46が給紙エラーを検知すると処理をS11dへ移行し、一方給紙エラーを検知しなかったときは処理をS14dへ移行する。なお、給紙エラー検出制御部46は、S7dにおいてフィードローラ対14の回転を開始したときから所定の時間が経過しても用紙10を搬送センサ17で紙ありを検知することができなかった場合、給紙エラーを検知する。
【0100】
S11d:主制御部40は、スキューローラ13の回転停止位置が格納されている変数DATAから、図10におけるS1cで格納したスキューローラ13の回転量の可変値として記憶部41に記憶した変数αを減算し、変数DATAのスキューローラ13の回転停止位置の値を変更する。これにより、S3dにおけるスキューローラ13の回転量を減らし、S8dにおけるスキューローラ13の回転量を増やして用紙10の搬送距離を長くすることができる。
【0101】
S12d:主制御部40は、変数DATAのスキューローラ13の回転停止位置の値を変更した結果、その変数DATAが限界値(例えば、0.6回転)を超えて小さい値となっているかを判定し、限界値を超えていないと判定した場合、処理をS2dへ移行し、引き続き給紙処理を継続する。一方、限界値を超えて小さい値となっていると判定した場合、処理をS13dへ移行する。
【0102】
S13d:限界値を超えていると判定すると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate2に格納し、給紙エラーとして給紙処理を終了する。
【0103】
S14d:S9dの用紙10の給紙動作において、給紙エラーを検知することなく正常に給紙できた場合、主制御部40は、スキューローラ13の回転停止位置の値としての変数DATAを記憶部41の変数rotate2に格納し、給紙処理を終了する。このように、変数DATAを記憶部41の変数rotate2に格納することにより、運用モードの給紙動作において、給紙エラーとならないスキューローラ13の回転停止位置の値を初期値として利用することができるようになる。
【0104】
S15d:給紙処理を終了すると主制御部40は、従来処理としてのローカルテスト処理を行う。
【0105】
このようにして印刷装置はローカルテスト給紙処理を行う。
【0106】
以上説明したように、第2の実施例では、第1の実施例の効果に加え、ローカルテストにより使用する用紙を予めテスト給紙し、最適なスキューローラの回転停止位置を予め確定しておくことにより、給紙エラーを発生させない適正な給紙動作を行うことができ、さらに給紙エラーの発生を防止、抑制することができるという効果が得られる。
【実施例3】
【0107】
第3の実施例の構成は、第1の実施例の構成に、操作者の操作により印刷装置の各種設定を行うメニュー設定で設定された印字ヘッドと図示しないプラテンとの間のギャップに基づいてスキューローラの回転停止位置を決定する機能を備えたものである。
【0108】
図12は第3の実施例における印刷装置の構成を示すブロック図である。なお、上述した第1の実施例と同様の部分は、同一の符号を付してその説明を省略する。
【0109】
図12において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472、搬送センサ検出部473、ギャップ制御部49、およびメニュー設定処理部50から構成されている。
【0110】
ギャップ制御部49は、操作者の操作によるメニュー設定で設定されたギャップ設定の状態を検知し、設定されたギャップ設定に応じて印字ヘッドと図示しないプラテンとの間のギャップを調整する制御を行うものである。
【0111】
ギャップ設定手段としてのメニュー設定処理部50は、印刷装置1に設けられた入力手段としてのスイッチの押下を検知し、ギャップ設定等のメニュー設定を行い、設定された内容を記憶部41に記憶させるとともに設定されたギャップ設定に応じてスキューローラ回転停止位置テーブル510からスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数に格納する処理を行うものである。
【0112】
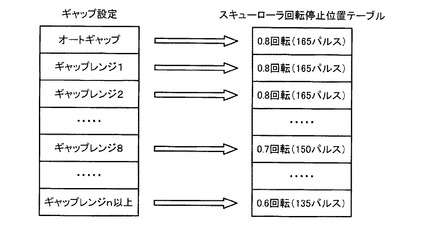
メニュー設定で設定されるギャップ設定は、例えば印刷装置が自動で最適なギャップ量を検出するオートギャップ、操作者の操作により指定されたギャップ量を表すマニュアルギャップとしてのギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等であり、そのギャップ設定は記憶部41に記憶される。
【0113】
なお、オートギャップが設定された場合、印字ヘッドと用紙との接触を検知する紙厚検知機構を備え、印字時に印字ヘッドと用紙間のギャップ(間隔)が適正になるように調整し、マニュアルギャップが設定された場合、設定されたギャップレンジに基づいて印字ヘッドと用紙間のギャップを調整する。したがって、マニュアルギャップの設定は、用紙の紙厚に応じて設定されるものとする。
【0114】
ギャップ制御部49は、メニュー設定処理部50で設定されたオートギャップ、またはギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等のマニュアルギャップに基づいてギャップを調整する。
【0115】
また、メニュー設定処理部50は、設定されたオートギャップ、またはギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等のマニュアルギャップに基づいてスキューローラ回転停止位置テーブル510からスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数に格納する。
【0116】
ここで、スキューローラ回転停止位置テーブル510は、図13に示すようにギャップ設定のオートギャップ、ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn以上に対応させてスキューローラ13の回転数の初期値をスキューローラ13の回転停止位置情報として記憶したものである。なお、このスキューローラ回転停止位置テーブル510は、予め記憶部41に記憶されているものである。
【0117】
上述した構成の作用について説明する。
【0118】
印刷装置の電源投入処理は図5の第1の実施例における電源投入処理を示すフローチャートと同様の処理なのでその説明を省略する。なお、本実施例も用紙を単票として説明する。
【0119】
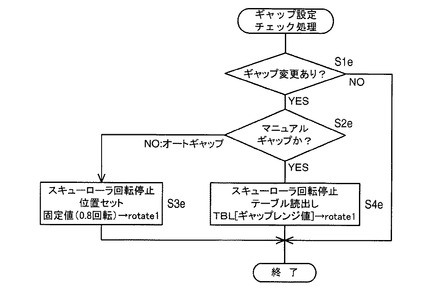
次に、印刷装置が行うギャップ設定チェック処理を図14の第3の実施例におけるギャップ設定チェック処理を示すフローチャートの図中Sで表すステップにしたがって図12を参照しながら説明する。
【0120】
S1e:メニュー設定処理部50は、ギャップ設定が行なわれた後、記憶部41を読み出して操作者の操作によるメニュー設定で設定されたギャップ設定の状態を確認し、オートギャップ、ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等への変更が行われたか否かを判定する。変更が行われたと判定すると処理をS2eへ移行し、変更が行われていないと判定すると本ギャップ設定チェック処理を終了する。
【0121】
S2e:メニュー設定処理部50は、ギャップ設定がオートギャップに変更されたか否かを判定し、オートギャップに変更されたと判定すると処理をS3eへ移行し、一方ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等に変更されたと判定すると処理をS4eへ移行する。
【0122】
S3e:オートギャップに変更されたと判定するとメニュー設定処理部50は、スキューローラ回転停止位置テーブル510からオートギャップに対応付けられたスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数(例えば、0.8回転)の初期値として記憶部41の変数rotate1に格納して本処理を終了する。
【0123】
S4e:ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等に変更されたと判定するとメニュー設定処理部50は、スキューローラ回転停止位置テーブル510から変更されたギャップレンジに対応付けられたスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数rotate1に格納して本処理を終了する。
【0124】
このようにギャップ設定に基づいてスキューローラ13の回転停止位置を決定することにより、紙厚に応じた適正な給紙動作を行い、給紙エラーの発生を防止、抑制することができる。
【0125】
なお、印刷装置が行う給紙処理は第1の実施例と同様なのでその説明を省略する。
【0126】
以上説明したように、第3の実施例では、第1の実施例の効果に加え、ギャップ設定に基づいてスキューローラの回転停止位置を予め決定することにより、紙厚に応じた適正な給紙動作を行うことができるようになり、給紙エラーの発生をさらに防止、抑制することができるという効果が得られる。
【符号の説明】
【0127】
1 印刷装置
10 用紙
11 アッパーガイド
12 ロワーガイド
13 スキューローラ
13a 扇状部
14 フィードローラ対
15 印字ヘッド
16 テーブルセンサ
17 搬送センサ
21 スリット板
22 切り欠き部
30 スリットセンサ
40 主制御部
41 記憶部
42 フィードローラ制御部
421 LFモータ
43 スキューローラ制御部
431 スキューモータ
44 スキューローラ停止位置制御部
45 斜行補正制御部
46 給紙エラー検出制御部
47 センサ検出部
471 テーブルセンサ検出部
472 スリットセンサ検出部
473 搬送センサ検出部
【技術分野】
【0001】
本発明は、媒体の斜行を補正するとともに斜行が補正された該媒体を搬送する印刷装置に関する。
【背景技術】
【0002】
従来の印刷装置は、用紙吸入口に設けられたゴムローラの回転により挿入された用紙の先端を装置内部の用紙搬送ローラに突き当てて斜行を補正した後、その用紙搬送ローラを回転させて挿入された用紙を給紙するようにしているものがある(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−193492号公報(段落「0029」〜段落「0036」、図8、図10)
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の技術においては、挿入された用紙が厚紙(複写紙を含む)である場合、斜行補正後に用紙搬送ローラを回転させて用紙を装置の内部へ引き込む給紙動作において、その用紙搬送ローラと用紙との間のスリップにより装置内部に用紙を引き込むことができない給紙エラーが発生する場合があるという問題がある。
【0005】
本発明は、このような問題を解決することを課題とし、挿入された用紙が厚紙であってもその用紙を確実に給紙できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
そのため、本発明は、突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、前記突き当てローラの回転量を制御する制御手段とを有し、前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更することを特徴とする。
【発明の効果】
【0007】
このようにした本発明は、挿入された用紙が厚紙であってもその用紙を確実に給紙できるという効果が得られる。
【図面の簡単な説明】
【0008】
【図1】第1の実施例における印刷装置の説明図
【図2】第1の実施例におけるスキュー補正ローラおよびスリット板の説明図
【図3】第1の実施例におけるスキュー補正ローラの停止位置の説明図
【図4】第1の実施例における印刷装置の構成を示すブロック図
【図5】第1の実施例における電源投入処理を示すフローチャート
【図6】第1の実施例における給紙処理を示すフローチャート
【図7】第1の実施例における給紙動作を示す説明図
【図8】第1の実施例における給紙動作を示す説明図
【図9】第2の実施例における印刷装置の構成を示すブロック図
【図10】第2の実施例におけるローカルテスト起動処理を示すフローチャート
【図11】第2の実施例におけるローカルテストの給紙処理を示すフローチャート
【図12】第3の実施例における印刷装置の構成を示すブロック図
【図13】第3の実施例におけるスキューローラ回転停止位置テーブルの説明図
【図14】第3の実施例におけるギャップ設定チェック処理を示すフローチャート
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明による印刷装置の実施例を説明する。
【実施例1】
【0010】
図1は第1の実施例における印刷装置の説明図であり、図1(a)は媒体としての用紙が挿入されるときの状態を示し、図1(b)は用紙を搬送している状態を示している。
【0011】
図1において、1は印刷装置であり、挿入された用紙10を給紙し、給紙した用紙10に文字等を印刷するものである。
【0012】
11はアッパーガイド、12はロワーガイドであり、ロワーガイド12の上方にアッパーガイド11が配置され、ロワーガイド12とアッパーガイド11の間に用紙10を案内し、用紙10の挿入口および搬送路を形成している。
【0013】
13は突き当てローラとしてのスキューローラであり、挿入された用紙10を搬送して後述するフィードローラ対14に突き当て、その用紙10の斜行(以下、「スキュー」という。)を補正するためのローラであり、ロワーガイド12およびアッパーガイド11で形成される用紙10の挿入口に配設され、回転軸方向に所定の間隔を保持して配設された複数のローラからなるものである。
【0014】
それぞれのスキューローラ13には、略D字状の扇状部13aが形成され、図1(b)に示すように図中矢印で示す方向に回転する扇状部13aで挿入された用紙10に接触してその用紙10を搬送する。一方、扇状部13aが形成されていない部位であるスキューローラ13の平坦部は、図1(a)に示すように用紙10の搬送に寄与しないようになっている。
【0015】
また、それぞれのスキューローラ13に対応するようにロワーガイド12に凹部が形成され、回転するスキューローラ13の扇状部13aに用紙10を接触させて搬送できるようになっている。
【0016】
なお、スキューローラ13は、図示しない駆動手段としてのスキューモータの回転駆動により回転する。
【0017】
14は、フィードローラ対であり、スキューローラ13の扇状部13aにより搬送された用紙10を挟持して搬送するローラ対である。このフィードローラ対14は、スキューローラ13の下流の搬送路に、互いに周面を接触させて配設されている。また、フィードローラ対14は、回転軸方向に所定の間隔を保持して配設された複数のローラ対からなるものであり、スキューローラ13に対応する位置に配設されている。
【0018】
挿入口に挿入された用紙10がスキューしている場合、その用紙10の搬送に伴って用紙10の前端がフィードローラ対14を構成する各ローラのうち、所定のローラ、例えば挿入口の左端のローラに突き当たる。このとき、左端のフィードローラ対14と左端のスキューローラ13は対応する位置に配設されているので、用紙10の前端が左端のフィードローラ対14に突き当たると用紙10に対して左端のスキューローラ13はスリップして左端のスキューローラ13による用紙10の搬送は行われない。
【0019】
その後、他のスキューローラ13は、それ以降も用紙10の搬送を継続するため、用紙10の前端が左側のフィードローラ対14から右側のフィードローラ対14に順次突き当たり、用紙10に対してスキューローラ13がそれぞれスリップしてスキューローラ13による用紙10の搬送が行われなくなり、発生した用紙10のスキューが補正されて取り除かれる。
【0020】
なお、スキューローラ13は、フィードローラ対14に突き当たった用紙10に対して十分にスリップするように柔軟なゴム材料によって形成されている。
【0021】
また、フィードローラ対14は、図示しない駆動手段としてのラインフィード(LF)モータの回転駆動により回転する。
【0022】
15は印字ヘッドであり、フィードローラ対14で搬送された用紙10に文字等を印刷するものである。この印字ヘッド15で印刷された用紙10は、フィードローラ対14により装置前面または図示しない搬送ローラにより装置背面へ排出される。
【0023】
16はテーブルセンサであり、光学式のセンサ等で構成され、フィードローラ対14の上流にフィードローラ対14の回転軸に平行する方向に複数(例えば10個程度)配設されたセンサである。この複数のテーブルセンサ16のうち、いずれかのテーブルセンサ16で用紙10を検知することにより挿入口に用紙10が挿入されたことを検知し、また複数のテーブルセンサ16で用紙10を検知することによりスキューが補正されたことを検知する。
【0024】
17は媒体検知手段としての搬送センサであり、フィードローラ対14で搬送された用紙10を検知するための光学式のセンサ等で構成されたものである。
【0025】
次に、スキューローラ13を図2の第1の実施例におけるスキュー補正ローラおよびスリット板の説明図、図3の第1の実施例におけるスキュー補正ローラの停止位置の説明図に基づいて説明する。
【0026】
図2において、21はスリット板であり、一部に切り欠き部22が形成された板である。このスリット板21は、スキューローラ13の回転軸に取り付けられスキューローラ13の回転とともに回転し、図3に示す光学式センサ等で構成されたスリットセンサ30により切り欠き部22を検知してスキューローラ13の扇状部13aの位置を制御するためのものである。
【0027】
スリット板21の切り欠き部22は、スキューローラ13の扇状部13aの一端部と所定の角θを成すようにスキューローラ13の回転軸に取り付けられている。したがって、センサにより切り欠き部22の端部を検知してからのスキューローラ13の回転角を制御することにより、スキューローラ13の扇状部13aの位置を制御することができるようになっている。
【0028】
図3(a)はスキューローラ13の扇状部13aのホームポジション(初期位置)、図3(b)はスキューローラ13の扇状部13aの停止位置1、図3(c)はスキューローラ13の扇状部13aの停止位置2を示した例である。
【0029】
図3(a)に示す扇状部13aのホームポジション(初期位置)は、スリット板21の切り欠き部22をスリットセンサ30で検知したときに停止させた位置であり、図3(b)に示すスキューローラ13の扇状部13aの停止位置1は、スリット板21の切り欠き部22をスリットセンサ30で検知した初期位置からスキューローラ13に165パルスを付与して0.8回転(288度回転)させて停止させた位置であり、図3(c)に示すスキューローラ13の扇状部13aの停止位置2は、スリット板21の切り欠き部22をスリットセンサ30で検知した初期位置からスキューローラ13に150パルスを付与して0.7回転(252度回転)させて停止させた位置である。
【0030】
図4は第1の実施例における印刷装置の構成を示すブロック図である。
【0031】
図4において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472および搬送センサ検出部473から構成されている。
【0032】
主制御部40は、CPU(Central Processing Unit)等の中央処理演算装置であり、メモリ等の記憶部41に記憶された制御プログラム(ソフトウェア)に基づいて印刷装置1全体の動作を制御する。
【0033】
フィードローラ制御部42は、LFモータ421を回転駆動させて図1におけるフィードローラ対14の回転を制御し、用紙10の搬送および停止位置を制御する。
【0034】
スキューローラ制御部43は、スキューモータ431を回転駆動させて図1におけるスキューローラ13の回転を制御する。
【0035】
スキューローラ停止位置制御部44は、回転駆動されたスキューモータ431の停止位置を制御し、スキューローラ制御部43と協調して用紙10を給紙する給紙動作時の用紙10のスキューの補正および用紙10の搬送を補助する制御を行う。
【0036】
なお、スキューモータ431はステッピングモータ等の回転量を制御することができるモータで構成され、本実施例ではスキューモータ431に付与するパルス数を制御することにより、回転量を制御してスキューローラ13の扇状部13aの停止位置を制御することができるようになっている。
【0037】
センサ検出部47は、図1におけるテーブルセンサ16の出力信号を検出するテーブルセンサ検出部471、図2におけるスリットセンサ30の出力信号を検出するスリットセンサ検出部472および図1における搬送センサ17の出力信号を検出する搬送センサ検出部473を備え、検出したそれぞれのセンサの出力信号をデジタル信号に変換して出力する。
【0038】
斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10が挿入口に挿入されたことを検知するとともにその用紙10の斜行状態を確認し、またセンサ検出部47から入力したスリットセンサ30の出力信号に基づいてスキューローラ13の扇状部の回転位置を検知し、スキューローラ制御部43に対してスキューローラ13の回転動作の開始/停止等の指示を行う。
【0039】
給紙エラー検出制御部46は、センサ検出部47から入力した搬送センサ17の出力信号に基づいて所定の時間が経過しても用紙10を搬送センサ17の位置まで給紙することができなかった給紙エラー(搬送異常)を検知する。なお、主制御部40は、時間の経過を計測する計時手段を備えているものとする。
【0040】
上述した構成の作用について説明する。
【0041】
まず、印刷装置の電源投入処理を図5の第1の実施例における電源投入処理を示すフローチャートの図中Sで表すステップにしたがって図4を参照しながら説明する。なお、本実施例では用紙を単票として説明する。
【0042】
S1a:印刷装置1の電源が投入されると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate1に格納する。
【0043】
S2a:また、主制御部40は、スキューローラ13の回転量の可変値として所定の回転数(例えば、0.05回転(8パルス相当))を記憶部41の変数αに格納する。
【0044】
次に、印刷装置が行う給紙処理を図6の第1の実施例における給紙処理を示すフローチャートの図中Sで表すステップにしたがって図7の第1の実施例における給紙動作を示す説明図および図4を参照しながら説明する。
【0045】
図7(a)に示すように単票手差し挿入口に用紙10が挿入されるとテーブルセンサ16が紙ありを検知するが、例えば隣り合う2個以上のテーブルセンサ16が紙ありを検知したとき、主制御部40は用紙10のスキュー補正を開始する。
【0046】
S1b:まず、主制御部40は、記憶部41の変数rotate1に格納されているスキューローラ13の回転停止位置の値を記憶部41に記憶される変数DATAに代入する。
【0047】
S2b:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10がセットされている状態を確認する。
【0048】
S3b:制御手段としてのスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転、停止させてスキュー補正動作を行う。
【0049】
S4b:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7bへ移行し、一方未完了と判定すると処理をS5bへ移行する。
【0050】
ここで、本実施例では、斜行補正制御部45は、連続する3個以上のテーブルセンサ16が紙ありを検知したとき、スキュー補正が完了したと判定するものとする。
【0051】
S5b:スキュー補正が未完了、すなわち不完全と判定するとスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転させ、停止させるスキュー補正動作を再度行う。
【0052】
S6b:斜行補正制御部45は、S4bと同様に、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7bへ移行し、一方未完了と判定すると従来のスキュー補正のエラー処理(S16b、S17b)を行う。
【0053】
S7b:スキュー補正が完了するとフィードローラ制御部42は、LFモータ421を回転駆動させてフィードローラ対14を回転させ、用紙10を搬送する。
【0054】
S8b:S7bと同時に、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させる。
【0055】
S9b:スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させ、フィードローラ対14に押し付けられている用紙10の搬送を補助しながら給紙動作を継続する。なお、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させるとそのスキューローラ13を停止する。
【0056】
S10b:用紙10の給紙動作において、給紙エラー検出制御部46が給紙エラーを検知すると処理をS11bへ移行し、一方給紙エラーを検知しなかったときは処理をS14bへ移行する。なお、給紙エラー検出制御部46は、S7bにおいてフィードローラ対14の回転を開始したときから所定の時間が経過しても用紙10を搬送センサ17で紙ありを検知することができなかった場合、給紙エラーを検知する。
【0057】
S11b:主制御部40は、スキューローラ13の回転停止位置が格納されている変数DATAから、図5におけるS2aで格納したスキューローラ13の回転量の可変値として記憶部41に記憶した変数αを減算し、変数DATAのスキューローラ13の回転停止位置の値を変更する。これにより、S3bにおけるスキューローラ13の回転量を減らし、S8bにおけるスキューローラ13の回転量を増やして用紙10の搬送距離を長くすることができる。
【0058】
S12b:主制御部40は、変数DATAのスキューローラ13の回転停止位置の値を変更した結果、その変数DATAが限界値(例えば、0.6回転)を超えて小さい値となっているかを判定し、限界値を超えていないと判定した場合、処理をS2bへ移行し、引き続き給紙処理を継続する。一方、限界値を超えて小さい値となっていると判定した場合、処理をS13bへ移行する。
【0059】
なお、本実施例で限界値を設けているのは、スキューローラ13の回転量を減らし過ぎると用紙10のスキューを取り除くことができなくなるからである。
【0060】
S13b:限界値を超えていると判定すると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate1に格納し、給紙エラーとして給紙処理を終了する。
【0061】
S14b:S9bの用紙10の給紙動作において、給紙エラーを検知することなく正常に給紙できた場合、主制御部40は、スキューローラ13の回転停止位置の値としての変数DATAを記憶部41の変数rotate1に格納し、給紙処理を終了する。このように、変数DATAを記憶部41の変数rotate1に格納することにより、次回の給紙動作において、給紙エラーとならないスキューローラ13の回転停止位置の値を利用することができるようになる。
【0062】
S15b:給紙処理を終了すると主制御部40は、従来処理としての印字動作を行う。
【0063】
このようにして印刷装置は給紙処理を行う。
【0064】
次に、上述した給紙処理で給紙エラーが発生したときの再給紙動作を図7に基づいて説明する。
【0065】
図7(a)に示すように隣り合う2個以上のテーブルセンサ16が紙ありを検知して用紙10が単票手差し挿入口に挿入されたことを検知する。
【0066】
図7(b)に示すようにスキューローラ13を図中矢印が示す方向へ0.8回転させ、図3(b)に示す停止位置1で停止させる(図6におけるS3b)。スキューローラ13の回転により、用紙10のスキューが補正され、用紙10がフィードローラ対14に押し当てられる。スキューローラ13を停止位置1に停止させることにより、次にスキューローラ13を回転させるときに用紙10の搬送距離を確保し、用紙10のフィードローラ対14への押し込み力が大きくなるようにする。
【0067】
図7(c)に示すように図中矢印が示す方向へスキューローラ13とフィードローラ対14を同時に回転させ、用紙10を給紙する(図6におけるS7b、S8b)。
【0068】
このとき、図7(d)に示すように用紙10の先端がフィードローラ対14への噛み込みが不十分で用紙10がスリップして給紙エラーが発生するものと仮定する(図6におけるS10b)。
【0069】
給紙エラーが発生すると図7(e)に示すようにスキューローラ13を図中矢印が示す方向へ0.7回転(図7(b)と比較して回転量が0.1回転減少)させ、図3(c)に示す停止位置2で停止させる(図6におけるS3b)。スキューローラ13の回転により、用紙10のスキューが補正され、用紙10がフィードローラ対14に押し当てられる。スキューローラ13を停止位置2に停止させることにより、次にスキューローラ13を回転させるときに用紙10の搬送距離をさらに確保し、用紙10のフィードローラ対14への押し込み力が大きくなるようにする。
【0070】
したがって、図7(b)のスキューローラ13の停止位置1と比較して図7(e)のスキューローラ13の停止位置2では、給紙動作におけるスキューローラ13の回転量が増加し、用紙10の搬送距離が長くなり、用紙10のフィードローラ対14への押し込み力が大きくなる。
【0071】
図7(f)に示すように図中矢印が示す方向へスキューローラ13とフィードローラ対14を同時に回転させ、用紙10を給紙し(図6におけるS7b、S8b)、搬送センサ17で用紙10を検知して正常に給紙されたことを検知する。
【0072】
このように給紙エラーを検知した後の再給紙動作においてスキューローラ13の回転量を増加させることにより、用紙10の搬送距離を長くすることができるとともにフィードローラ対14への押し込み力を大きくすることができ、フィードローラ対14への噛み込みが良化し、給紙エラーの発生を抑えることができる。
【0073】
従来の制御では、図8(a)に示すように用紙10が薄い場合、フィードローラ対14に噛み込み易く、給紙動作において給紙エラーは発生し難いが、図8(b)に示すように用紙10が厚い場合、フィードローラ対14に噛み込み難く、給紙動作において給紙エラーが発生し易かった。
【0074】
本実施例のように、スキュー補正動作におけるスキューローラ13の回転停止位置を変更し、スキュー補正動作の後に行う給紙動作におけるスキューローラ13の回転量を増加させ、用紙10の搬送距離を長くしてフィードローラ対14への押し込み力を大きくすることにより、用紙10が厚い場合であってもフィードローラ対14に確実に噛み込ませることができ、給紙エラーの発生を防止、抑制することができる。
【0075】
以上説明したように、第1の実施例では、スキュー補正動作におけるスキューローラの回転停止位置を変更し、スキュー補正動作の後に行う給紙動作におけるスキューローラの回転量を増加させ、用紙の搬送距離を長くしてフィードローラ対への押し込み力を大きくすることにより、用紙が厚い場合であってもフィードローラ対に確実に噛み込ませることができ、給紙エラーの発生を防止、抑制して確実に給紙することができるという効果が得られる。
【実施例2】
【0076】
第2の実施例の構成は、第1の実施例の構成に、使用する用紙を給紙して予め給紙エラーが発生しない適正なスキューローラの停止位置を決定するための自己診断機能(以下、「ローカルテスト」という。)を備えたものである。
【0077】
図9は第2の実施例における印刷装置の構成を示すブロック図である。なお、上述した第1の実施例と同様の部分は、同一の符号を付してその説明を省略する。
【0078】
図9において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、ローカルテスト制御部441、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472、搬送センサ検出部473、およびスイッチ制御部48から構成されている。
【0079】
自己診断手段としてのローカルテスト制御部441は、保守用に準備されたローカルテストを実行するものである。
【0080】
スイッチ制御部48は、印刷装置1に設けられた入力手段としてのスイッチの押下を検知し、ローカルテストを含む各スイッチの機能を起動、実行させるものである。
【0081】
上述した構成の作用について説明する。
【0082】
まず、印刷装置のローカルテスト起動処理を図10の第2の実施例におけるローカルテスト起動処理を示すフローチャートの図中Sで表すステップにしたがって図9を参照しながら説明する。なお、本実施例も用紙を単票として説明する。
【0083】
印刷装置1の電源投入時にローカルテストを起動するスイッチが押下されていることをスイッチ制御部48が検知するとローカルテスト制御部441は、ローカルテストを起動してローカルテストモードへ移行する。
【0084】
S1c:ローカルテストが起動されると主制御部40は、スキューローラ13の回転量の可変値として所定の回転数(例えば、0.05回転(8パルス相当))を記憶部41の変数αに格納する。
【0085】
S2c:ローカルテスト制御部441は、適正なスキューローラ13の停止位置を認識するためのローカルテストの給紙処理を行う。なお、このローカルテストの給紙処理の内容は後述する。
【0086】
S3c:主制御部40は、ローカルテストの給紙処理で導出したスキューローラ13の回転停止位置の値としての記憶部41に記憶された変数rotate2を記憶部41の変数rotate1に格納し、初期値として保存する。以降、ローカルテストモードを終了した後の通常の運用モードでは記憶部41に格納された変数rotate1に基づいて給紙処理が行われる。
【0087】
次に、印刷装置が行うローカルテストの給紙処理を図11の第2の実施例におけるローカルテストの給紙処理を示すフローチャートの図中Sで表すステップにしたがって図7および図9を参照しながら説明する。
【0088】
図7(a)に示すように単票手差し挿入口に用紙10が挿入されるとテーブルセンサ16が紙ありを検知するが、例えば隣り合う2個以上のテーブルセンサ16が紙ありを検知したとき、主制御部40は用紙10のスキュー補正を開始する。
【0089】
S1d:まず、主制御部40は、スキューローラ13の回転停止位置の初期値としての固定値(本実施例では、0.8回転)を記憶部41に記憶される変数DATAに代入する。
【0090】
S2d:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいて用紙10がセットされている状態を確認する。
【0091】
S3d:制御手段としてのスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転、停止させてスキュー補正動作を行う。
【0092】
S4d:斜行補正制御部45は、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7dへ移行し、一方未完了と判定すると処理をS5dへ移行する。
【0093】
ここで、本実施例では、斜行補正制御部45は、連続する3個以上のテーブルセンサ16が紙ありを検知したとき、スキュー補正が完了したと判定するものとする。
【0094】
S5d:スキュー補正が未完了、すなわち不完全と判定するとスキューローラ停止位置制御部44は、記憶部41から読取った変数DATAに記憶されている回転量に基づきスキューローラ13を回転させ、停止させるスキュー補正動作を再度行う。
【0095】
S6d:斜行補正制御部45は、S4dと同様に、センサ検出部47から入力したテーブルセンサ16の出力信号に基づいてスキュー補正が完了したか否かを判定し、完了したと判定すると処理をS7dへ移行し、一方未完了と判定すると処理をS2dへ移行し、スキュー補正動作のリトライを行う。
【0096】
S7d:スキュー補正が完了するとフィードローラ制御部42は、LFモータ421を回転駆動させてフィードローラ対14を回転させ、用紙10を搬送する。
【0097】
S8d:S7dと同時に、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させる。
【0098】
S9d:スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させ、フィードローラ対14に押し付けられている用紙10の搬送を補助しながら給紙動作を継続する。なお、スキューローラ停止位置制御部44は、スキューローラ13をホームポジションまで回転させるとそのスキューローラ13を停止する。
【0099】
S10d:用紙10の給紙動作において、給紙エラー検出制御部46が給紙エラーを検知すると処理をS11dへ移行し、一方給紙エラーを検知しなかったときは処理をS14dへ移行する。なお、給紙エラー検出制御部46は、S7dにおいてフィードローラ対14の回転を開始したときから所定の時間が経過しても用紙10を搬送センサ17で紙ありを検知することができなかった場合、給紙エラーを検知する。
【0100】
S11d:主制御部40は、スキューローラ13の回転停止位置が格納されている変数DATAから、図10におけるS1cで格納したスキューローラ13の回転量の可変値として記憶部41に記憶した変数αを減算し、変数DATAのスキューローラ13の回転停止位置の値を変更する。これにより、S3dにおけるスキューローラ13の回転量を減らし、S8dにおけるスキューローラ13の回転量を増やして用紙10の搬送距離を長くすることができる。
【0101】
S12d:主制御部40は、変数DATAのスキューローラ13の回転停止位置の値を変更した結果、その変数DATAが限界値(例えば、0.6回転)を超えて小さい値となっているかを判定し、限界値を超えていないと判定した場合、処理をS2dへ移行し、引き続き給紙処理を継続する。一方、限界値を超えて小さい値となっていると判定した場合、処理をS13dへ移行する。
【0102】
S13d:限界値を超えていると判定すると主制御部40は、スキューローラ13の回転停止位置のデフォルト値としての固定値(本実施例では、0.8回転)を記憶部41の変数rotate2に格納し、給紙エラーとして給紙処理を終了する。
【0103】
S14d:S9dの用紙10の給紙動作において、給紙エラーを検知することなく正常に給紙できた場合、主制御部40は、スキューローラ13の回転停止位置の値としての変数DATAを記憶部41の変数rotate2に格納し、給紙処理を終了する。このように、変数DATAを記憶部41の変数rotate2に格納することにより、運用モードの給紙動作において、給紙エラーとならないスキューローラ13の回転停止位置の値を初期値として利用することができるようになる。
【0104】
S15d:給紙処理を終了すると主制御部40は、従来処理としてのローカルテスト処理を行う。
【0105】
このようにして印刷装置はローカルテスト給紙処理を行う。
【0106】
以上説明したように、第2の実施例では、第1の実施例の効果に加え、ローカルテストにより使用する用紙を予めテスト給紙し、最適なスキューローラの回転停止位置を予め確定しておくことにより、給紙エラーを発生させない適正な給紙動作を行うことができ、さらに給紙エラーの発生を防止、抑制することができるという効果が得られる。
【実施例3】
【0107】
第3の実施例の構成は、第1の実施例の構成に、操作者の操作により印刷装置の各種設定を行うメニュー設定で設定された印字ヘッドと図示しないプラテンとの間のギャップに基づいてスキューローラの回転停止位置を決定する機能を備えたものである。
【0108】
図12は第3の実施例における印刷装置の構成を示すブロック図である。なお、上述した第1の実施例と同様の部分は、同一の符号を付してその説明を省略する。
【0109】
図12において、印刷装置1は、主制御部40、記憶部41、フィードローラ制御部42、スキューローラ制御部43、スキューローラ停止位置制御部44、斜行補正制御部45、給紙エラー検出制御部46、センサ検出部47、テーブルセンサ検出部471、スリットセンサ検出部472、搬送センサ検出部473、ギャップ制御部49、およびメニュー設定処理部50から構成されている。
【0110】
ギャップ制御部49は、操作者の操作によるメニュー設定で設定されたギャップ設定の状態を検知し、設定されたギャップ設定に応じて印字ヘッドと図示しないプラテンとの間のギャップを調整する制御を行うものである。
【0111】
ギャップ設定手段としてのメニュー設定処理部50は、印刷装置1に設けられた入力手段としてのスイッチの押下を検知し、ギャップ設定等のメニュー設定を行い、設定された内容を記憶部41に記憶させるとともに設定されたギャップ設定に応じてスキューローラ回転停止位置テーブル510からスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数に格納する処理を行うものである。
【0112】
メニュー設定で設定されるギャップ設定は、例えば印刷装置が自動で最適なギャップ量を検出するオートギャップ、操作者の操作により指定されたギャップ量を表すマニュアルギャップとしてのギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等であり、そのギャップ設定は記憶部41に記憶される。
【0113】
なお、オートギャップが設定された場合、印字ヘッドと用紙との接触を検知する紙厚検知機構を備え、印字時に印字ヘッドと用紙間のギャップ(間隔)が適正になるように調整し、マニュアルギャップが設定された場合、設定されたギャップレンジに基づいて印字ヘッドと用紙間のギャップを調整する。したがって、マニュアルギャップの設定は、用紙の紙厚に応じて設定されるものとする。
【0114】
ギャップ制御部49は、メニュー設定処理部50で設定されたオートギャップ、またはギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等のマニュアルギャップに基づいてギャップを調整する。
【0115】
また、メニュー設定処理部50は、設定されたオートギャップ、またはギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等のマニュアルギャップに基づいてスキューローラ回転停止位置テーブル510からスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数に格納する。
【0116】
ここで、スキューローラ回転停止位置テーブル510は、図13に示すようにギャップ設定のオートギャップ、ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn以上に対応させてスキューローラ13の回転数の初期値をスキューローラ13の回転停止位置情報として記憶したものである。なお、このスキューローラ回転停止位置テーブル510は、予め記憶部41に記憶されているものである。
【0117】
上述した構成の作用について説明する。
【0118】
印刷装置の電源投入処理は図5の第1の実施例における電源投入処理を示すフローチャートと同様の処理なのでその説明を省略する。なお、本実施例も用紙を単票として説明する。
【0119】
次に、印刷装置が行うギャップ設定チェック処理を図14の第3の実施例におけるギャップ設定チェック処理を示すフローチャートの図中Sで表すステップにしたがって図12を参照しながら説明する。
【0120】
S1e:メニュー設定処理部50は、ギャップ設定が行なわれた後、記憶部41を読み出して操作者の操作によるメニュー設定で設定されたギャップ設定の状態を確認し、オートギャップ、ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等への変更が行われたか否かを判定する。変更が行われたと判定すると処理をS2eへ移行し、変更が行われていないと判定すると本ギャップ設定チェック処理を終了する。
【0121】
S2e:メニュー設定処理部50は、ギャップ設定がオートギャップに変更されたか否かを判定し、オートギャップに変更されたと判定すると処理をS3eへ移行し、一方ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等に変更されたと判定すると処理をS4eへ移行する。
【0122】
S3e:オートギャップに変更されたと判定するとメニュー設定処理部50は、スキューローラ回転停止位置テーブル510からオートギャップに対応付けられたスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数(例えば、0.8回転)の初期値として記憶部41の変数rotate1に格納して本処理を終了する。
【0123】
S4e:ギャップレンジ1、ギャップレンジ2、・・・、ギャップレンジn等に変更されたと判定するとメニュー設定処理部50は、スキューローラ回転停止位置テーブル510から変更されたギャップレンジに対応付けられたスキューローラ13の回転停止位置情報を読出し、その回転停止位置情報をスキューローラ13の回転数の初期値として記憶部41の変数rotate1に格納して本処理を終了する。
【0124】
このようにギャップ設定に基づいてスキューローラ13の回転停止位置を決定することにより、紙厚に応じた適正な給紙動作を行い、給紙エラーの発生を防止、抑制することができる。
【0125】
なお、印刷装置が行う給紙処理は第1の実施例と同様なのでその説明を省略する。
【0126】
以上説明したように、第3の実施例では、第1の実施例の効果に加え、ギャップ設定に基づいてスキューローラの回転停止位置を予め決定することにより、紙厚に応じた適正な給紙動作を行うことができるようになり、給紙エラーの発生をさらに防止、抑制することができるという効果が得られる。
【符号の説明】
【0127】
1 印刷装置
10 用紙
11 アッパーガイド
12 ロワーガイド
13 スキューローラ
13a 扇状部
14 フィードローラ対
15 印字ヘッド
16 テーブルセンサ
17 搬送センサ
21 スリット板
22 切り欠き部
30 スリットセンサ
40 主制御部
41 記憶部
42 フィードローラ制御部
421 LFモータ
43 スキューローラ制御部
431 スキューモータ
44 スキューローラ停止位置制御部
45 斜行補正制御部
46 給紙エラー検出制御部
47 センサ検出部
471 テーブルセンサ検出部
472 スリットセンサ検出部
473 搬送センサ検出部
【特許請求の範囲】
【請求項1】
突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、
媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、
前記突き当てローラの回転量を制御する制御手段とを有し、
前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更することを特徴とする印刷装置。
【請求項2】
請求項1の印刷装置において、
前記搬送ローラ対で搬送された媒体を検知する媒体検知手段を備え、
前記所定条件は、前記媒体検知手段が媒体を検知できない搬送異常の発生の検知とし、
前記制御手段は、前記搬送異常の発生を検知すると前記突き当てローラの初期位置からの回転量を減少させて媒体の斜行を補正し、前記搬送ローラ対と前記扇状部の距離を長くすることを特徴とする印刷装置。
【請求項3】
請求項2の印刷装置において、
前記制御手段は、前記搬送異常の検知回数が多くなるに連れて前記突き当てローラの初期位置からの回転量を減少させて媒体の斜行を補正し、前記搬送ローラ対と前記扇状部の距離を長くすることを特徴とする印刷装置。
【請求項4】
請求項2または請求項3の印刷装置において、
使用する媒体を前記突き当てローラが前記搬送ローラ対に突き当て、前記搬送ローラ対が該媒体を試験搬送する自己診断手段を備え、
前記自己診断手段は、前記搬送異常検知回数に基づいて決定した前記突き当てローラの初期位置からの回転量を記憶部に記憶させ、
前記制御手段は、前記記憶部に記憶された前記回転量を初期値として前記突き当てローラの回転量を制御することを特徴とする印刷装置。
【請求項5】
請求項2または請求項3の印刷装置において、
操作者の操作を受付けて使用する媒体の厚さに応じて該媒体と印字ヘッドとの間隔を設定するギャップ設定手段と、
前記間隔に対応付けて前記突き当てローラの初期位置からの回転量を予め記憶した回転停止位置テーブルとを備え、
前記ギャップ設定手段は、設定された前記間隔に基づいて前記回転停止位置テーブルから抽出した前記突き当てローラの初期位置からの回転量を記憶部に記憶させ、
前記制御手段は、前記記憶部に記憶された前記回転量を初期値として前記突き当てローラの回転量を制御することを特徴とする印刷装置。
【請求項1】
突き当てられた媒体の斜行を補正した後、該媒体を挟持して搬送する搬送ローラ対を備えた印刷装置において、
媒体と接触して前記搬送ローラ対に該媒体を突き当てる扇状部が形成された突き当てローラと、
前記突き当てローラの回転量を制御する制御手段とを有し、
前記制御手段は、所定条件に基づいて前記突き当てローラの扇状部の停止位置を変更することを特徴とする印刷装置。
【請求項2】
請求項1の印刷装置において、
前記搬送ローラ対で搬送された媒体を検知する媒体検知手段を備え、
前記所定条件は、前記媒体検知手段が媒体を検知できない搬送異常の発生の検知とし、
前記制御手段は、前記搬送異常の発生を検知すると前記突き当てローラの初期位置からの回転量を減少させて媒体の斜行を補正し、前記搬送ローラ対と前記扇状部の距離を長くすることを特徴とする印刷装置。
【請求項3】
請求項2の印刷装置において、
前記制御手段は、前記搬送異常の検知回数が多くなるに連れて前記突き当てローラの初期位置からの回転量を減少させて媒体の斜行を補正し、前記搬送ローラ対と前記扇状部の距離を長くすることを特徴とする印刷装置。
【請求項4】
請求項2または請求項3の印刷装置において、
使用する媒体を前記突き当てローラが前記搬送ローラ対に突き当て、前記搬送ローラ対が該媒体を試験搬送する自己診断手段を備え、
前記自己診断手段は、前記搬送異常検知回数に基づいて決定した前記突き当てローラの初期位置からの回転量を記憶部に記憶させ、
前記制御手段は、前記記憶部に記憶された前記回転量を初期値として前記突き当てローラの回転量を制御することを特徴とする印刷装置。
【請求項5】
請求項2または請求項3の印刷装置において、
操作者の操作を受付けて使用する媒体の厚さに応じて該媒体と印字ヘッドとの間隔を設定するギャップ設定手段と、
前記間隔に対応付けて前記突き当てローラの初期位置からの回転量を予め記憶した回転停止位置テーブルとを備え、
前記ギャップ設定手段は、設定された前記間隔に基づいて前記回転停止位置テーブルから抽出した前記突き当てローラの初期位置からの回転量を記憶部に記憶させ、
前記制御手段は、前記記憶部に記憶された前記回転量を初期値として前記突き当てローラの回転量を制御することを特徴とする印刷装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−57371(P2011−57371A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−208698(P2009−208698)
【出願日】平成21年9月9日(2009.9.9)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月9日(2009.9.9)
【出願人】(591044164)株式会社沖データ (2,444)
【出願人】(594202361)株式会社沖データシステムズ (259)
【Fターム(参考)】
[ Back to top ]