
印字装置
【課題】簡易な構成で、複数の卵に印字することができる印字装置を提供すること。
【解決手段】印字装置3は、トレイ7に立てられた状態で載置される複数の卵8の頂部に印字する印字装置3であって、複数の卵8は、第1方向D1に複数個並ぶ一列が第1方向D1に直交する第2方向D2に複数列並んだ状態でトレイ7に載置されており、レーザビームを出射する1つのレーザヘッド31aと、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1及び第2方向D2に走査することで、レーザビームにより卵8の頂部に印字させる走査機構部32と、1つのレーザヘッド31aから出射されるレーザビームが第2方向D2に並ぶ複数の卵8の頂部を含む範囲を走査するように走査機構部32を制御する制御部36と、を備える。
【解決手段】印字装置3は、トレイ7に立てられた状態で載置される複数の卵8の頂部に印字する印字装置3であって、複数の卵8は、第1方向D1に複数個並ぶ一列が第1方向D1に直交する第2方向D2に複数列並んだ状態でトレイ7に載置されており、レーザビームを出射する1つのレーザヘッド31aと、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1及び第2方向D2に走査することで、レーザビームにより卵8の頂部に印字させる走査機構部32と、1つのレーザヘッド31aから出射されるレーザビームが第2方向D2に並ぶ複数の卵8の頂部を含む範囲を走査するように走査機構部32を制御する制御部36と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の卵にレーザビームで印字する印字装置に関する。
【背景技術】
【0002】
従来、複数の卵にレーザビームで賞味期限等の文字を印字する印字装置として、複数の卵がトレイに載置された状態で、トレイを縦方向及び横方向に移動させることにより、レーザビームの照射位置に卵を順番に移動させて、複数の卵に印字する印字装置が知られている(例えば、特許文献1参照)。
特許文献1に記載の印字装置は、トレイに載置された状態で複数の卵に印字できるため、複数の卵に効率よく印字を行うことができるとされている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−136859号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の印字装置は、複数の卵をトレイごと縦方向及び横方向に移動させるため、複数の卵が載置されたトレイを移動させる機構や制御が必要となり、構成が複雑となる。そのため、簡易な構成で、複数の卵に印字することができる印字装置が望まれている。
【0005】
本発明は、簡易な構成で、複数の卵に印字することができる印字装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、トレイに立てられた状態で載置される複数の卵の頂部に印字する印字装置であって、前記複数の卵は、第1方向に複数個並ぶ一列が前記第1方向に直交する第2方向に複数列並んだ状態で前記トレイに載置されており、レーザビームを出射する1つのレーザヘッドと、前記1つのレーザヘッドから出射されるレーザビームを前記第1方向及び前記第2方向に走査することで、レーザビームにより前記卵の頂部に印字させる走査機構部と、前記1つのレーザヘッドから出射されるレーザビームが前記第2方向に並ぶ複数の卵の頂部を含む範囲を走査するように前記走査機構部を制御する制御部と、を備える印字装置に関する。
【0007】
また、前記制御部は、前記複数の卵のうちの1つの卵の頂部に印字する際に、前記1つのレーザヘッドから出射されるレーザビームが延びる方向である照射方向と同一方向に延びる仮想線が卵の中心を通る場合における前記仮想線と前記1つの卵の表面との交点を基準として、前記卵の頂部に印字するように、前記走査機構部を制御することが好ましい。
【0008】
また、前記トレイに載置された前記複数の卵を前記第1方向に搬送する搬送装置を備えることが好ましい。
【0009】
また、前記搬送装置により搬送される前記複数の卵の前記第1方向の位置を検出する位置検出部を更に備え、前記制御部は、前記第1方向の上流側から下流側に向けて搬送される前記複数の卵のうちの1つの卵に印字する際に、前記位置検出部により検出された前記1つの卵の位置情報に基づいて、前記1つの卵の表面における前記第1方向の下流側から上流側に向かって印字するように、前記走査機構部を制御することが好ましい。
【発明の効果】
【0010】
本発明によれば、簡易な構成で、複数の卵に印字することができる印字装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1実施形態の包装装置1における各構成要素の配置を説明するための図である。
【図2】本発明の印字装置3の構成を説明する斜視図である。
【図3】本発明の印字装置3の構成を説明するブロック図である。
【図4】第2実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【図5】第3実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【発明を実施するための形態】
【0012】
以下、本発明の第1実施形態について、図1〜図3を参照して、本発明の実施形態の包装装置1について説明する。本発明の実施形態の包装装置1は、複数の鶏卵8を包装するための装置である。
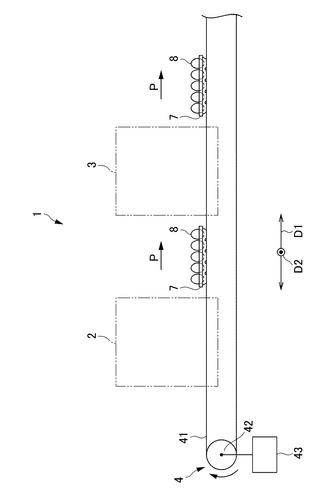
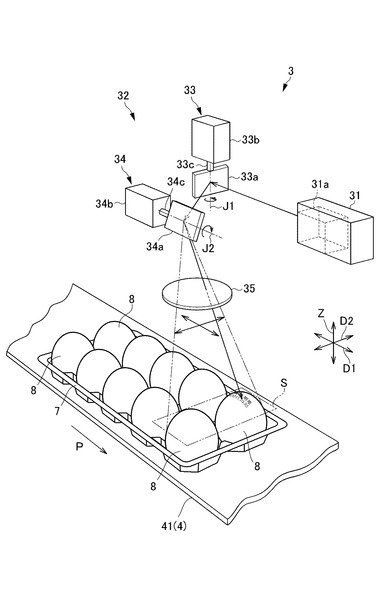
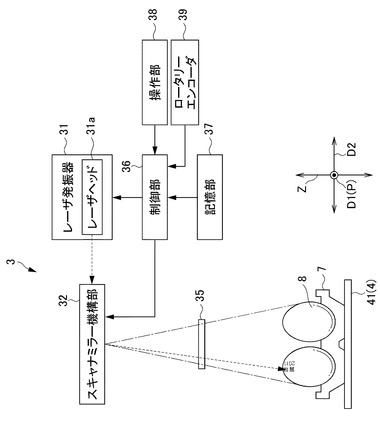
図1は、本発明の第1実施形態の包装装置1における各構成要素の配置を説明するための図である。図2は、本発明の印字装置3の構成を説明する斜視図である。図3は、本発明の印字装置3の構成を説明するブロック図である。
【0013】
なお、本実施形態の包装装置1の説明において、10個の鶏卵8がトレイ7に載置されている状態で、5個の鶏卵8が一列に並ぶ方向であってトレイ7の長辺に沿う方向を「第1方向D1」という(図2参照)。第1方向D1は、トレイ7に載置された10個の鶏卵8が搬送装置4により搬送される場合の搬送方向Pに平行な方向でもある。第1方向D1に並ぶ5個の鶏卵8の一列が2列並ぶ方向であると共にトレイ7の短辺に沿う方向であって、水平方向で且つ第1方向D1に直交する方向を「第2方向D2」という(図2参照)。垂直方向を「Z方向」(第1方向D1及び第2方向D2に直交する方向でもある)という。
【0014】
図1に示すように、本実施形態に係る包装装置1は、卵載置装置2と、印字装置3と、搬送装置4とを備える。
搬送装置4は、搬送ベルト41と、駆動ローラ42と、駆動モータ43とを備える。搬送ベルト41は、卵載置装置2と印字装置3とを通るように配置されており、トレイ7を移動させる搬送ラインを構成する。搬送ベルト41は、駆動モータ43により駆動されて、搬送ベルト41の上面に載置されたトレイ7を搬送方向Pに搬送する。これにより、搬送ベルト41は、トレイ7に載置された10個の鶏卵(卵)8を搬送方向P(第1方向D1)に搬送する。
【0015】
卵載置装置2は、10個の鶏卵8を立てた状態でトレイ7に載置する装置である。卵載置装置2は、10個の鶏卵8を、第1方向D1に5個並ぶ一列が第2方向D2に2列並んだ状態で、トレイ7の10個の凹部分に立てた状態で載置する。
トレイ7は、10個の鶏卵8を立てた状態で2列に並べて載置するための容器であって、一般的に卵パックや卵容器等と呼ばれる包装容器において、10個の鶏卵8が載置される部分を構成する。トレイ7は、例えば、透明のプラスチック製のものやダンボール製のものなどがある。
【0016】
本実施形態においては、図2に示すように、トレイ7は、10個の鶏卵8を立てた状態で載置可能な10個の凹部分を有して形成されている。トレイ7の10個の凹部分は、鶏卵8を立てた状態における鶏卵8の下側の部分の曲面に沿う形状に形成される。トレイ7は、10個の鶏卵8を立てた状態で2列に並べて載置できるように、第1方向D1に5個並ぶ一列が、第2方向D2に2列並んで構成される。第1方向D1は、搬送方向Pに平行な方向である。第2方向D2は、水平方向で且つ第1方向D1に直交する方向である。
【0017】
また、卵載置装置2は、10個の鶏卵8をトレイ7に載置した後に、トレイ7に蓋をかぶせる動作を行わない。なお、トレイ7の蓋は、後述する印字装置3による鶏卵8への賞味期限等の文字の印字の完了後に、後の工程でかぶせられる。これにより、10個の鶏卵8は包装された状態となる。その後、トレイ7に載置された状態で包装された10個の鶏卵8は、出荷される。
【0018】
印字装置3は、卵載置装置2の搬送方向Pの下流側に配置されている。印字装置3は、立てられた状態でトレイ7に載置される2列に並ぶ10個の鶏卵8の頂部に賞味期限等の文字を印字する装置である。本実施形態においては、鶏卵8の頂部は、立てた状態の鶏卵8において、側面から視た場合に、鶏卵8における上方側の頂点(上端部)から鶏卵8の高さの3分の1程度までの範囲の部分である。そのため、鶏卵8の頂部とは、鶏卵8における上方側の最も端部の点である頂点(上端部)のみを示すものではない。鶏卵8の頂部に印字する文字としては、賞味期限の文字のほかに、例えば、産卵日や生産者名やブランド名等の文字がある。
【0019】
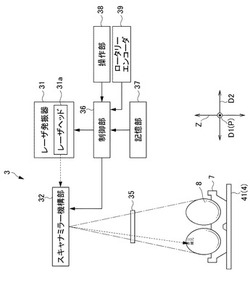
印字装置3は、図2に示すように、搬送装置4と、レーザ発振器31と、走査機構部としてのスキャナミラー機構部32と、集光レンズ35とを備える。搬送装置4は、前述の通り、10個の鶏卵8が載置されたトレイ7を搬送方向Pに搬送する。搬送装置4は、鶏卵8の第1方向D1の位置を検出する位置検出部としてのロータリーエンコーダ39を有する。ロータリーエンコーダ39は、駆動ローラ42の回転軸に設けられる不図示のスリット板と、不図示のフォトセンサと、により構成される光学式センサである。ロータリーエンコーダ39からの出力パルスは、後述する制御部36に出力される。後述する制御部36は、ロータリーエンコーダ39から出力された鶏卵8の位置情報に基づいて、レーザビームを照射するタイミングや、スキャナミラー機構部32の動作を制御する。
【0020】
レーザ発振器31は、1つのレーザヘッド31aを有する。1つのレーザヘッド31aは、所定の径を有する1本のレーザビームを出射する。1つのレーザヘッド31aから出射されるレーザビームは、スキャナミラー機構部32により走査されることで、鶏卵8の頂部の表面に賞味期限等の文字を印字する。また、1本のレーザビームの所定の径は、鶏卵8の表面を走査することにより、鶏卵8の表面に賞味期限等の文字を印字可能な径である。そのため、1つのレーザヘッド31aから出射される1本のレーザビームは、2個以上の鶏卵8を同時に照射することはない。
【0021】
スキャナミラー機構部32は、1つのレーザヘッド31aから出射されるレーザビームを、レーザビームの走査範囲S内で、第1方向D1及び第2方向D2に走査する。第1方向D1及び第2方向D2に走査されたレーザビームは、鶏卵8の頂部に賞味期限等を印字することができる。
スキャナミラー機構部32は、例えば、単にスキャナミラーと呼ばれたり、ガルバノスキャナと呼ばれることもある。
【0022】
スキャナミラー機構部32は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、レーザ発振器31と印字位置に位置した2個の鶏卵8,8との間に配置される。ここで、2個の鶏卵8,8の印字位置とは、1つのレーザヘッド31aから出射されるレーザビームの走査範囲S内に、第2方向D2に並ぶ2個の鶏卵8,8の頂部が位置する位置である。本実施形態においては、第2方向D2に並ぶ2個の鶏卵8,8は、搬送装置4により搬送されることにより、印字位置に移動される。
【0023】
スキャナミラー機構部32は、第1方向走査部33と、第2方向走査部34とを有する。
第1方向走査部33は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第2方向走査部34よりもレーザ発振器31側に配置される。
第1方向走査部33は、第1ミラー33aと、第1ミラー駆動モータ33bとを有する。
【0024】
第1ミラー33aは、1つのレーザヘッド31aから出射されるレーザビームを第2方向走査部34の第2ミラー34a(後述)に向けて反射させると共に、第1回転軸J1を中心に回動することで、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1に沿う方向に走査するミラーである。
【0025】
第1ミラー33aは、レーザビームを反射させる反射面を有する。第1ミラー33aの反射面は、レーザヘッド31aから出射されるレーザビームを第2ミラー34aに向けて反射させるように、レーザヘッド31a及び第2ミラー34aに対して所定角度傾いて面している。第1ミラー33aは、反射面の角度を変化させるように第1回転軸J1を中心に回動可能に構成される。第1回転軸J1は、Z方向に延びる回転軸である。
【0026】
第1ミラー駆動モータ33bは、出力軸33cが第1ミラー駆動モータ33bの回転駆動力を第1ミラー33aに伝達して、第1ミラー33aを第1回転軸J1を中心に回動させる。これにより、第1ミラー駆動モータ33bは、第1ミラー33aの反射面の角度を変化させて、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1に走査する。
【0027】
第2方向走査部34は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第1方向走査部33よりも印字位置に位置する鶏卵8側に配置される。
第2方向走査部34は、第2ミラー34aと、第2ミラー駆動モータ34bとを有する。
【0028】
第2ミラー34aは、印字位置に位置する2個の鶏卵8,8のZ方向の上方側に配置される。第2ミラー34aは、第1方向走査部33により反射されるレーザビームを印字位置に位置する鶏卵8のZ方向の上方側から2個の鶏卵8,8の頂部に向けて反射させると共に、第2回転軸J2を中心に回動することで、1つのレーザヘッド31aから出射されて第1方向走査部33により反射されるレーザビームを第2方向D2に走査するミラーである。
【0029】
第2ミラー34aは、レーザビームを反射させる反射面を有する。第2ミラー34aの反射面は、第1ミラー33aにより反射されて照射されるレーザビームを印字位置に位置する鶏卵8に向けて反射させるように、第1ミラー33a及び印字位置に位置する2個の鶏卵8,8に対して所定角度傾いて面している。第2ミラー34aは、反射面の角度を変化させるように第2回転軸J2を中心に回動可能に構成される。第2回転軸J2は、第1回転軸J1に直交すると共に第1方向D1に延びる回転軸である。
【0030】
第2ミラー駆動モータ34bは、出力軸34cが第2ミラー駆動モータ34bの回転駆動力を第2ミラー34aに伝達して、第2ミラー34aを第2回転軸J2を中心に回動させる。これにより、第2ミラー駆動モータ34bは、第2ミラー34aの反射面の角度を変化させて、1つのレーザヘッド31aから出射されるレーザビームを第2方向D2に走査する。
【0031】
集光レンズ35は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第2方向走査部34と印字位置に位置する2個の鶏卵8,8との間に配置される。集光レンズ35は、第2ミラー34aに反射されたレーザビームを集光して、2個の鶏卵8,8のうちの一方又は他方の鶏卵8にレーザビームを照射する。
【0032】
以上のように、1つのレーザヘッド31aから出射されるレーザビームの光路上には、レーザヘッド31aから印字位置に位置する2個の鶏卵8,8までの間に、レーザヘッド31a、第1方向走査部33、第2方向走査部34、集光レンズ35及び2個の鶏卵8,8が、この順に並んで配置されている。
これにより、1つのレーザヘッド31aから出射されたレーザビームは、第1方向走査部33の第1ミラー33aによって反射された後、さらに第2方向走査部34の第2ミラー34aによって反射され、集光レンズ35を介して、印字位置に位置する2個の鶏卵8,8のうちの一方又は他方の鶏卵8に照射される。
【0033】
また、スキャナミラー機構部32は、第1ミラー駆動モータ33bによって第1ミラー33aを回動させ、かつ、第2ミラー駆動モータ34bによって第2ミラー34aを回動させる。これにより、1つのレーザヘッド31aから出射されたレーザビームは、第1方向走査部33が第1ミラー33aを回動させることにより第1方向D1に走査され、第2方向走査部34が第2ミラー34aを回動させることにより第2方向D2に走査される。
【0034】
レーザビームの走査範囲Sは、図2に示すように、レーザビームが第1方向D1に走査可能な範囲と、レーザビームが第2方向D2に走査可能な範囲とで囲まれる範囲である。
本実施形態においては、レーザビームの走査範囲Sは、第2方向D2に並ぶ2個の鶏卵8,8が印字位置にある場合において、Z方向の上方側から視た場合に、少なくとも、第2方向D2に並ぶ2個の鶏卵8,8の頂部の部分を含む範囲となるように設定されている。
なお、レーザビームの走査範囲Sは、スキャナミラー機構部32の構成やスキャナミラー機構部32から鶏卵8までの距離やスキャナミラー機構部32の制御の設定等によって所定の範囲に設定される。
【0035】
以上のように構成されることにより、スキャナミラー機構部32は、レーザビームの走査範囲Sにおいて、1つのレーザヘッド31aから出射されたレーザビームを、第2方向D2に並んだ2個の鶏卵8,8のうちの一方又は他方の鶏卵8のいずれにも走査させることができる。つまり、第2方向D2に並んだ2個の鶏卵8,8のうちの一方側に配置された鶏卵8に印字を行う場合にはレーザビームを一方側に配置された鶏卵8側に走査し、他方側に配置された鶏卵8に印字を行う場合にはレーザビームを他方側に配置された鶏卵8側に走査することにより、第2方向D2に並んだ2個の鶏卵8,8のそれぞれに印字することができる。
【0036】
また、スキャナミラー機構部32は、レーザビームの走査範囲Sにおいて、1つのレーザヘッド31aから出射されたレーザビームを第1方向D1及び第2方向D2に走査可能である。そのため、1つのレーザヘッド31aから出射されたレーザビームは、レーザビームの走査範囲Sに位置する鶏卵8の頂部の任意の位置において、任意の文字を印字することができる。
【0037】
図3に示すように、印字装置3は、上記の構成の他に、制御部36と、記憶部37と、操作部38とを備える。
制御部36は、印字装置3を統括的に制御するための制御部であり、例えばCPU等から構成される。制御部36は、記憶部37に記憶された各種プログラムや印字に関する文字の画像情報等を適宜読み出して実行することにより、前述したレーザ発振器31やスキャナミラー機構部32等のハードウェアと協働し、本発明に係る各種機能を実現している。
また、制御部36は、1つのレーザヘッド31aから出射されるレーザビームが走査範囲S(第2方向D2に並ぶ2個の鶏卵8,8の頂部を含む範囲)を走査して文字を印字するようにスキャナミラー機構部32を制御する。
また、制御部36は、記憶部37に記憶された賞味期限等の文字の画像情報を、鶏卵8の表面に効率的に印字するように、スキャナミラー機構部32を制御する。
また、制御部36は、操作部38により入力された日付等の文字の情報を画像情報に変換する。
【0038】
記憶部37は、本実施形態の印字装置3を動作させるための制御プログラムや印字に関する文字の画像情報等を予め記憶している。具体的には、記憶部37は、例えば、鶏卵8に印字する印字内容のタイトル(例えば「賞味期限」など)の文字の画像情報を記憶する。
操作部38は、作業者等が、賞味期限の日時等の数値を入力するテンキー等や鶏卵8に印字する印字内容を選択する選択キー等を備える入力装置である。操作部38は、制御部36に接続されている。操作部38により入力された賞味期限の日時等の情報は、制御部36により画像情報に変換されて記憶部37に記憶される。
【0039】
次に、包装装置1の動作について説明する。
まず、卵載置装置2は、10個の鶏卵8を立てた状態で2列に並べてトレイ7に載置する。10個の鶏卵8が載置されたトレイ7は、搬送装置4により、印字装置3に向けて搬送される。
印字装置3に搬送された2列に並ぶ10個の鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、図2に示すように、印字位置に搬送される。2個の鶏卵8,8の印字位置とは、1つのレーザヘッド31aから出射されるレーザビームの走査範囲S内に、第2方向D2に並ぶ2個の鶏卵8,8の頂部が位置する位置である。レーザビームの走査範囲Sとは、1つのレーザヘッド31aから出射されるレーザビームが走査可能な範囲である。
【0040】
本実施形態においては、鶏卵8の頂部への印字は、搬送装置4によりトレイ7が搬送されている途中に、鶏卵8が載置されたトレイ7の移動中に行われる。
【0041】
2列に並ぶ鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、不図示の光センサに検知されることにより、所定位置に位置することが検知される。また、先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、ロータリーエンコーダ39により、第1方向D1の位置を検出する。
先頭の2個の鶏卵8,8が所定位置に位置することが光センサにより検知されると、制御部36は、光センサによる検知信号及びロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、2個の鶏卵8,8の頂部が、第2ミラー34aのZ方向の下方側に位置するタイミングを算出する。そして、制御部36は、その算出されたタイミングに基づいて、1つのレーザヘッド31aがレーザビームを出射するようにレーザ発振器31を制御する。
【0042】
制御部36は、レーザビームの走査範囲Sにおいて、記憶部37に記憶された画像情報や搬送装置4の搬送速度の情報等に基づいて、第2方向D2に並ぶ2個の鶏卵8,8の頂部のうちの一方又は他方の鶏卵8のそれぞれを走査するように、スキャナミラー機構部32を制御する。記憶部37には、鶏卵8に印字する印字内容のタイトルや作業者により操作部38から入力された賞味期限の日時等の情報から変換された画像情報等が記憶されている。
【0043】
1つのレーザヘッド31aから出射されるレーザビームは、スキャナミラー機構部32に走査されることで、2列の鶏卵8,8の先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれに賞味期限等の文字を印字する。第2方向D2に並ぶ2個の鶏卵8,8それぞれへの賞味期限等の印字は、レーザビームが第2方向D2に並ぶ2個の鶏卵8,8のうちの一方又は他方の鶏卵8の頂部それぞれを走査することで、略同時期に行われる。
【0044】
ここで、「略同時期」とは、第2方向D2に並ぶ2個の鶏卵8,8それぞれが搬送方向Pに移動する場合に、第2方向D2に並ぶ2個の鶏卵8,8それぞれがレーザビームの走査範囲S内に位置する間に、第2方向D2に並ぶ2個の鶏卵8,8それぞれへの印字を完了させることができる程度の同時期という意味である。
【0045】
そのため、制御部36は、第2方向D2に並ぶ2個の鶏卵8,8に対して、効率的に印字が行われるように、スキャナミラー機構部32を制御することが好ましい。制御部36は、搬送方向Pに移動中の第2方向D2に並ぶ2個の鶏卵8,8に対して、レーザビームの走査範囲Sを通り過ぎる前に、第2方向D2に並ぶ2個の鶏卵8,8の頂部をレーザビームで走査して印字を完了させればよい。例えば、制御部36は、第2方向D2に並ぶ2個の鶏卵8,8に対して、一方の鶏卵8に印字した後に他方の鶏卵8に印字するように制御してもよいし、一方及び他方の鶏卵8,8それぞれを交互に走査して印字するように制御してもよい。
【0046】
また、スキャナミラー機構部32は、レーザビームを第1方向D1及び第2方向D2に走査可能である。そのため、制御部36は、レーザビームの走査範囲Sに位置する鶏卵8の頂部の任意の位置において、任意の文字を印字するように制御することができる。つまり、レーザビームを第1方向D1及び第2方向D2に走査することにより、2列に並ぶ鶏卵8のうちの所定番目の第2方向D2に並ぶ2個の鶏卵8,8に対して、2個のうちのいずれの鶏卵8からでも印字を行うことができるし、印字を行う文字の画像情報の上下左右のいずれの側からでも印字を行うことができる。
【0047】
2列の鶏卵8の先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8の頂部への印字後、トレイ7は、更に搬送方向Pに搬送される。そして、印字位置に移動された順に、第2方向D2に並ぶ2個の鶏卵8,8ごとに、第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれにレーザビームを走査して印字を行う。そして、先頭の2個の鶏卵8,8から5番目の2個の鶏卵8,8まで順次印字が完了することにより、2列に並ぶ10個の鶏卵8への印字が完了する。
このように、1つのレーザヘッド31aから出射されるレーザビームをスキャナミラー機構部32で第2方向D2に走査するだけの簡易な構成で、第2方向D2に並ぶ2個の鶏卵8,8ごとに頂部それぞれに略同時期に印字することができる。そして、トレイ7に載置された2列に並ぶ10個の鶏卵8を搬送方向Pに移動させて、第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれに順次印字することで、2列に並ぶ10個の鶏卵8に印字することができる。
【0048】
印字装置3により印字された10個の鶏卵8は、トレイ7に載置された状態で、搬送装置4により搬送される。その後、10個の鶏卵8が載置されたトレイ7には蓋がかぶせられ、10個の鶏卵8は、トレイ7に載置された状態で包装され、出荷される。
【0049】
本実施形態の印字装置3によれば、例えば、以下の効果が奏される。
本実施形態の印字装置3においては、トレイ7に立てられた状態で載置される10個の鶏卵8の頂部に印字する印字装置3であって、10個の鶏卵8は、第1方向D1に5個並ぶ一列が第1方向D1に直交する第2方向D2に2列並んだ状態でトレイ7に載置されており、レーザビームを出射する1つのレーザヘッド31aと、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1及び第2方向D2に走査することで、レーザビームにより鶏卵8の頂部に印字させる走査機構部32と、1つのレーザヘッド31aから出射されるレーザビームが第2方向D2に並ぶ2個の鶏卵8,8の頂部を含む範囲を走査するように走査機構部32を制御する制御部36と、を備える。
【0050】
そのため、1つのレーザヘッド31aから出射されるレーザビームを走査することで、第2方向D2に並ぶ2個の鶏卵8,8の頂部に、略同時期に、印字することができる。これにより、レーザビームで走査するだけの簡易な構成で、2列に並んだ10個の鶏卵8に印字することができる。
【0051】
また、一般的に市場で流通しているトレイ7を利用して、2列に並んだ10個の鶏卵8をトレイ7に載置した状態で鶏卵8に印字することができる。そのため、10個の鶏卵8を整列させるための設備や作業等を必要せずに、10個の鶏卵8に印字することができる。従って、2列に並んだ10個の鶏卵8がトレイ7に載置されたそのままの状態で、10個の鶏卵8に効率よく印字することができる。
【0052】
また、賞味期限等の文字の画像情報を印字するに際して、レーザビームを第1方向D1及び第2方向D2に走査することにより、第2方向D2に並ぶ2個の鶏卵8,8に対して、2個のうちのいずれの鶏卵8からでも印字することができるし、印字する画像情報の上下左右のいずれの側からでも印字することができる。従って、第2方向D2に並ぶ2個の鶏卵8,8に効率よく印字することができる。
【0053】
また、第2方向D2に並ぶ2個の鶏卵8,8に対して1つのレーザヘッド31aで印字できるため、1個の鶏卵8に対して1つのレーザヘッドを設けなくてもよい。これにより、第2方向D2に2列並ぶ鶏卵8に対応させてレーザヘッドを2つ設ける場合に比べて、レーザヘッドに要するコストを軽減することができる。
また、1つのレーザヘッド31aを設けるだけでよいため、2つのレーザヘッドを設ける場合よりも、印字装置3の内部の省スペース化を実現することができる。
【0054】
また、本実施形態の印字装置3においては、トレイ7に載置された複数の鶏卵8を第1方向D1に搬送する搬送装置4を備える。
そのため、10個の鶏卵8は、トレイ7に載置された状態で搬送方向Pに移動される。これにより、先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8から5番目に位置する第2方向D2に並ぶ2個の鶏卵8,8まで、順次印字することができる。従って、トレイ7が搬送方向Pに搬送される動作に追従させて、トレイ7に載置された2列に並ぶ10個の鶏卵8に対して効率よく印字することができる。
【0055】
次に、本発明の印字装置3の他の実施形態としての第2実施形態及び第3実施形態について、図面を参照しながら説明する。なお、第2実施形態及び第3実施形態の説明にあたって、第1実施形態と同一の構成要件については同一の符号を付し、その説明を省略又は簡略化する。図4は、第2実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【0056】
第2実施形態の印字装置3の制御部36は、第1実施形態の印字装置3と比べて、第1実施形態の制御部36の機能に加えて、次の機能を有する。
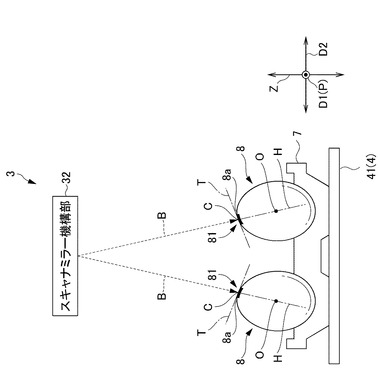
第2実施形態の制御部36は、8個の鶏卵8のうちの1つの鶏卵8の頂部に印字する際に、交点Cを基準として、鶏卵8の頂部に印字するように、スキャナミラー機構部32を制御する。交点Cは、1つのレーザヘッド31aから出射されるレーザビームBが延びる方向である照射方向と同一方向に延びる仮想線Hが鶏卵8の中心Oを通る場合において、仮想線Hと鶏卵8の表面との交点である。
【0057】
これにより、図4に示すように、印字装置3は、第1方向D1に視た場合に、第2方向D2において、鶏卵8の頂点8aよりもスキャナミラー機構部32側(鶏卵8の頂点8aからトレイ7の第2方向D2の中央側にずれた位置)に位置する交点Cを中心に、その周辺に印字することができる。
【0058】
ここで、レーザビームBの照射方向が、鶏卵8における印字する部分の接線Tを含む面に対して90度に近い角度であるほど、鶏卵8における印字する部分がレーザビームBの照射に対して傾斜が少ない状態で対面するため、印字の品質は、向上する。一方、レーザビームBの照射方向が、鶏卵8における印字する部分の接線Tを含む面に対して0度又は180度に近い角度であるほど、鶏卵8における印字する部分の接線Tを含む面がレーザビームBの照射方向に平行に近くなるため、印字の品質は、低下する。
本実施形態においては、この交点Cにおいては、レーザビームBの照射方向は、交点Cの接線Tを含む面に対して、角度が90度に近い。そのため、交点Cにおける接線Tを含む面は、レーザビームBの照射に対して、傾斜が少ない状態で対面する。
そして、印字装置3は、交点Cを基準として、交点Cを中心に、鶏卵8の曲面に沿う上下方向Zに文字列81の上下方向が沿うように印字することができる。従って、印字装置3は、レーザビームBの照射方向が交点Cの接線Tを含む面に対して90度に近い角度で印字することができる。これにより、印字する文字の品質を向上させることができる。
【0059】
第2実施形態の印字装置3によれば、第1実施形態の印字装置3が奏する効果の他に、以下のような効果が奏される。
制御部36は、8個の鶏卵8のうちの1つの鶏卵8の頂部に印字する際に、交点Cを基準として、鶏卵8の頂部に印字するように、スキャナミラー機構部32を制御する。交点Cは、1つのレーザヘッド31aから出射されるレーザビームBの照射方向と同一方向に延びる仮想線Hが鶏卵8の中心Oを通る場合において、仮想線Hと鶏卵8の表面との交点である。そのため、レーザビームBの照射方向は、交点Cの接線Tを含む面に対して、角度が90度に近い。従って、鶏卵8に印字する文字の品質を向上させることができる。
【0060】
次に、本発明の第3実施形態について説明する。図5は、第3実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【0061】
第3実施形態の印字装置3の制御部36は、第1実施形態の印字装置3と比べて、第1実施形態及び第2実施形態の制御部36の機能に加えて、次の機能を有する。
第3実施形態の制御部36は、第1方向D1の上流側から下流側に向けて搬送される8個の鶏卵8のうちの1つの鶏卵8に印字する際に、ロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、1つの鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字するように、スキャナミラー機構部32を制御する。具体的には、制御部36は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字するように、スキャナミラー機構部32を制御する。
【0062】
詳細には、印字装置3は、搬送ベルト41により搬送される鶏卵8の表面に、次のように印字する。
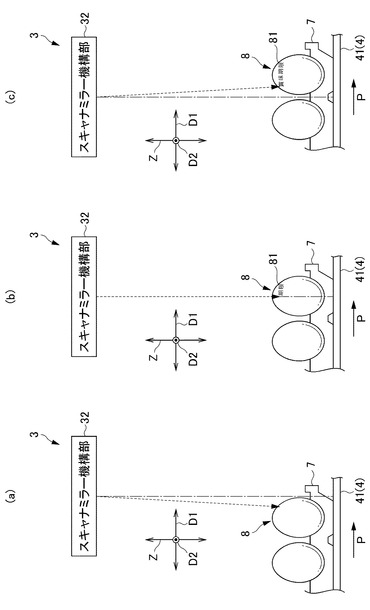
まず、図5(a)に示すように、制御部36は、搬送ベルト41により搬送される先頭の鶏卵8について、ロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、スキャナミラー機構部32よりも搬送方向Pの上流側を搬送される鶏卵8に対して、1つのレーザヘッド31aから出射されるレーザビームを照射するように、スキャナミラー機構部32を制御する。スキャナミラー機構部32よりも搬送方向Pの上流側を搬送される鶏卵8に対しては、鶏卵8の表面の搬送方向Pの最も下流側から印字を開始する。言い換えると、印字装置3は、鶏卵8の表面に文字列81を印字する場合において、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方を通過する前に、搬送ベルト41を搬送される鶏卵8を迎えにいくようにして、鶏卵8の表面の搬送方向Pの最も下流側の部分から印字を開始する。
【0063】
次に、印字装置3は、鶏卵8が搬送方向Pの上流側からスキャナミラー機構部32の垂直方向Zの下方に向けて搬送されるタイミングに追従させて、鶏卵8の表面の搬送方向Pの下流側から略中央部に向かって順に印字を行う。そして、図5(b)に示すように、印字装置3は、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に位置するときには、鶏卵8の表面の搬送方向Pの略中央部に印字を行う。
【0064】
次に、印字装置3は、鶏卵8がスキャナミラー機構部32の垂直方向Zから下流側に搬送されるタイミングに追従させて、鶏卵8の表面の搬送方向の略中央部から上流側に順に印字を行う。そして、図5(c)に示すように、印字装置3は、スキャナミラー機構部32の垂直方向Zよりも搬送方向Pの下流側において、印字する文字列81における鶏卵8の表面の搬送方向Pの最も上流側の部分において印字を終了する。
【0065】
そのため、印字装置3は、レーザビームの照射方向と、鶏卵8における印字する部分の接線を含む面とのなす角度が90度に近くなるように保持しながら、鶏卵8の第1方向D1への移動に追従して、鶏卵8の表面の搬送方向Pにおける下流側から上流側に向けて印字することができる。つまり、鶏卵8における印字する部分の接線を含む面は、鶏卵8が第1方向D1へ移動している間において、レーザビームの照射方向に対して傾斜が少ない状態で、レーザビームに対面する。
これにより、印字装置3は、鶏卵8の表面における上流側の端部側及び下流側の端部側において、印字する部分の接線を含む面がレーザビームの照射方向に対して平行に近くならない状態で、印字を行うことができる。よって、印字装置3は、文字の形状が歪むことを軽減して、鶏卵8に印字できる。従って、印字の品質を向上させることができる。
【0066】
また、印字装置3は、スキャナミラー機構部32の垂直方向Zの下方に到達する前から印字を開始して、鶏卵8を搬送しながら印字を進めて、スキャナミラー機構部32の垂直方向Zの下方に到達した後に印字を終了する。そのため、鶏卵8の表面に搬送方向Pに長い文字列81を印字する場合に、搬送ベルト41により搬送される鶏卵8の移動速度が比較的速い場合において、スキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、搬送方向Pに長い文字列81の印字を終了できないということが軽減される。
【0067】
また、印字装置3は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字する。そのため、レーザヘッド31aから鶏卵8の表面までの距離の変化が少ない。これにより、レーザビームの出力の強度を一定にしたままで、印字の品質を向上させることができる。その結果、視認性のよい文字を印字することができる。
【0068】
また、第1方向D1に搬送される鶏卵8の表面に第1方向D1に長い文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、スキャナミラー機構部の第1方向D1の走査角度を小さくできる。そのため、印字装置3は、搬送方向Pの長さが同じ文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、時間をかけて印字することができる。これにより、印字装置3は、レーザビームの出力が小さい場合であっても、鶏卵8の表面に安定して印字することができる。
【0069】
次に、印字装置3は、先頭の鶏卵8への印字が終了した後、10個の鶏卵8が搬送方向Pに搬送されるのに伴って、2番目の鶏卵8から5番目の鶏卵8まで順に、先頭の鶏卵8への印字と同様に印字を行う。
【0070】
また、第3実施形態の印字装置3においても、前述の第1実施形態と同様に、第2方向D2に並ぶ2列の鶏卵8,8それぞれに対して印字を行うことができる。つまり、第3実施形態の印字装置3は、2列に並ぶ10個の鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8に対して、同時期に印字を行うことができる。
これにより、印字装置3は、第2方向D2に並ぶ2個の鶏卵8,8のうちの一方側の鶏卵8又は他方側の鶏卵8に対して、同時期にレーザビームを第2方向D2に交互に走査し、かつ、搬送方向Pに搬送される際に、第2方向D2に並ぶ2個の鶏卵8,8それぞれに対して、鶏卵8の表面の搬送方向Pにおける下流側から上流側に向かって文字列81を印字することができる。
【0071】
第3実施形態の印字装置3によれば、第1実施形態及び第2実施形態の印字装置3が奏する効果の他に、以下のような効果が奏される。
印字装置3には、ロータリーエンコーダ39が設けられている。そのため、制御部36は、ロータリーエンコーダ39により検出された鶏卵8の第1方向D1の位置情報に基づいて、鶏卵8の第1方向D1への移動に追従して、1つの鶏卵8の表面の搬送方向Pにおける下流側から上流側に向かって印字することができる。
これにより、鶏卵8における印字する部分の接線を含む面は、レーザビームの照射に対して傾斜が少ない状態で、レーザビームに対面する。よって、印字装置3は、文字の形状が歪むことを軽減して、鶏卵8に印字できる。従って、印字の品質を向上させることができる。
【0072】
また、搬送ベルト41により搬送される鶏卵8の移動速度が比較的速い場合において、搬送方向Pの長さが同じ文字列81を印字する場合に、スキャナミラー機構部32の垂直方向Zの下方に到達してから鶏卵8に印字を開始する場合に比べて、搬送方向Pに長い文字列81の印字を終了できないということが軽減される。
【0073】
また、印字装置3は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字する。そのため、レーザヘッド31aから鶏卵8の表面までの距離の変化が少ない。これにより、レーザビームの出力の強度を一定にしたままで、印字の品質を向上させることができる。その結果、視認性のよい文字を印字することができる。
【0074】
また、搬送方向Pの長さが同じ文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、時間をかけて印字することができる。これにより、印字装置3は、レーザビームの出力が小さい場合であっても、鶏卵8の表面に安定して印字することができる。これにより、印字の品質を向上させることができる。
【0075】
以上、好適な実施形態について説明したが、本発明は前述した実施形態に限定されることなく種々の形態で実施することができる。
例えば、前述の実施形態においては、第2方向D2に2列並んだ状態でトレイ7に載置される10個の鶏卵8に印字するように構成したが、これに制限されない。例えば、第2方向D2に3列以上並んだ状態でトレイに載置される複数の鶏卵8に印字するように構成してもよい。この場合には、レーザビームの走査範囲Sを鶏卵8の列の数に対応させることで、1つのレーザヘッド31aで3列以上に並んだ複数の鶏卵8に印字することができる。
【0076】
また、前述の実施形態においては、複数の鶏卵8への印字を、トレイ7の移動中に行っているが、これに制限されない。複数の鶏卵8への印字は、例えば、トレイ7を停止した状態で行ってもよい。
本発明の印字装置3によって印字される卵は、鶏卵に制限されず、例えば、うずらの卵でもよい。
【符号の説明】
【0077】
3 印字装置
7 トレイ
8 鶏卵(卵)
31a レーザヘッド
32 スキャナミラー機構部(走査機構部)
39 ロータリーエンコーダ(位置検出部)
51 制御部
D1 第1方向
D2 第2方向
【技術分野】
【0001】
本発明は、複数の卵にレーザビームで印字する印字装置に関する。
【背景技術】
【0002】
従来、複数の卵にレーザビームで賞味期限等の文字を印字する印字装置として、複数の卵がトレイに載置された状態で、トレイを縦方向及び横方向に移動させることにより、レーザビームの照射位置に卵を順番に移動させて、複数の卵に印字する印字装置が知られている(例えば、特許文献1参照)。
特許文献1に記載の印字装置は、トレイに載置された状態で複数の卵に印字できるため、複数の卵に効率よく印字を行うことができるとされている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−136859号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の印字装置は、複数の卵をトレイごと縦方向及び横方向に移動させるため、複数の卵が載置されたトレイを移動させる機構や制御が必要となり、構成が複雑となる。そのため、簡易な構成で、複数の卵に印字することができる印字装置が望まれている。
【0005】
本発明は、簡易な構成で、複数の卵に印字することができる印字装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、トレイに立てられた状態で載置される複数の卵の頂部に印字する印字装置であって、前記複数の卵は、第1方向に複数個並ぶ一列が前記第1方向に直交する第2方向に複数列並んだ状態で前記トレイに載置されており、レーザビームを出射する1つのレーザヘッドと、前記1つのレーザヘッドから出射されるレーザビームを前記第1方向及び前記第2方向に走査することで、レーザビームにより前記卵の頂部に印字させる走査機構部と、前記1つのレーザヘッドから出射されるレーザビームが前記第2方向に並ぶ複数の卵の頂部を含む範囲を走査するように前記走査機構部を制御する制御部と、を備える印字装置に関する。
【0007】
また、前記制御部は、前記複数の卵のうちの1つの卵の頂部に印字する際に、前記1つのレーザヘッドから出射されるレーザビームが延びる方向である照射方向と同一方向に延びる仮想線が卵の中心を通る場合における前記仮想線と前記1つの卵の表面との交点を基準として、前記卵の頂部に印字するように、前記走査機構部を制御することが好ましい。
【0008】
また、前記トレイに載置された前記複数の卵を前記第1方向に搬送する搬送装置を備えることが好ましい。
【0009】
また、前記搬送装置により搬送される前記複数の卵の前記第1方向の位置を検出する位置検出部を更に備え、前記制御部は、前記第1方向の上流側から下流側に向けて搬送される前記複数の卵のうちの1つの卵に印字する際に、前記位置検出部により検出された前記1つの卵の位置情報に基づいて、前記1つの卵の表面における前記第1方向の下流側から上流側に向かって印字するように、前記走査機構部を制御することが好ましい。
【発明の効果】
【0010】
本発明によれば、簡易な構成で、複数の卵に印字することができる印字装置を提供することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1実施形態の包装装置1における各構成要素の配置を説明するための図である。
【図2】本発明の印字装置3の構成を説明する斜視図である。
【図3】本発明の印字装置3の構成を説明するブロック図である。
【図4】第2実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【図5】第3実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【発明を実施するための形態】
【0012】
以下、本発明の第1実施形態について、図1〜図3を参照して、本発明の実施形態の包装装置1について説明する。本発明の実施形態の包装装置1は、複数の鶏卵8を包装するための装置である。
図1は、本発明の第1実施形態の包装装置1における各構成要素の配置を説明するための図である。図2は、本発明の印字装置3の構成を説明する斜視図である。図3は、本発明の印字装置3の構成を説明するブロック図である。
【0013】
なお、本実施形態の包装装置1の説明において、10個の鶏卵8がトレイ7に載置されている状態で、5個の鶏卵8が一列に並ぶ方向であってトレイ7の長辺に沿う方向を「第1方向D1」という(図2参照)。第1方向D1は、トレイ7に載置された10個の鶏卵8が搬送装置4により搬送される場合の搬送方向Pに平行な方向でもある。第1方向D1に並ぶ5個の鶏卵8の一列が2列並ぶ方向であると共にトレイ7の短辺に沿う方向であって、水平方向で且つ第1方向D1に直交する方向を「第2方向D2」という(図2参照)。垂直方向を「Z方向」(第1方向D1及び第2方向D2に直交する方向でもある)という。
【0014】
図1に示すように、本実施形態に係る包装装置1は、卵載置装置2と、印字装置3と、搬送装置4とを備える。
搬送装置4は、搬送ベルト41と、駆動ローラ42と、駆動モータ43とを備える。搬送ベルト41は、卵載置装置2と印字装置3とを通るように配置されており、トレイ7を移動させる搬送ラインを構成する。搬送ベルト41は、駆動モータ43により駆動されて、搬送ベルト41の上面に載置されたトレイ7を搬送方向Pに搬送する。これにより、搬送ベルト41は、トレイ7に載置された10個の鶏卵(卵)8を搬送方向P(第1方向D1)に搬送する。
【0015】
卵載置装置2は、10個の鶏卵8を立てた状態でトレイ7に載置する装置である。卵載置装置2は、10個の鶏卵8を、第1方向D1に5個並ぶ一列が第2方向D2に2列並んだ状態で、トレイ7の10個の凹部分に立てた状態で載置する。
トレイ7は、10個の鶏卵8を立てた状態で2列に並べて載置するための容器であって、一般的に卵パックや卵容器等と呼ばれる包装容器において、10個の鶏卵8が載置される部分を構成する。トレイ7は、例えば、透明のプラスチック製のものやダンボール製のものなどがある。
【0016】
本実施形態においては、図2に示すように、トレイ7は、10個の鶏卵8を立てた状態で載置可能な10個の凹部分を有して形成されている。トレイ7の10個の凹部分は、鶏卵8を立てた状態における鶏卵8の下側の部分の曲面に沿う形状に形成される。トレイ7は、10個の鶏卵8を立てた状態で2列に並べて載置できるように、第1方向D1に5個並ぶ一列が、第2方向D2に2列並んで構成される。第1方向D1は、搬送方向Pに平行な方向である。第2方向D2は、水平方向で且つ第1方向D1に直交する方向である。
【0017】
また、卵載置装置2は、10個の鶏卵8をトレイ7に載置した後に、トレイ7に蓋をかぶせる動作を行わない。なお、トレイ7の蓋は、後述する印字装置3による鶏卵8への賞味期限等の文字の印字の完了後に、後の工程でかぶせられる。これにより、10個の鶏卵8は包装された状態となる。その後、トレイ7に載置された状態で包装された10個の鶏卵8は、出荷される。
【0018】
印字装置3は、卵載置装置2の搬送方向Pの下流側に配置されている。印字装置3は、立てられた状態でトレイ7に載置される2列に並ぶ10個の鶏卵8の頂部に賞味期限等の文字を印字する装置である。本実施形態においては、鶏卵8の頂部は、立てた状態の鶏卵8において、側面から視た場合に、鶏卵8における上方側の頂点(上端部)から鶏卵8の高さの3分の1程度までの範囲の部分である。そのため、鶏卵8の頂部とは、鶏卵8における上方側の最も端部の点である頂点(上端部)のみを示すものではない。鶏卵8の頂部に印字する文字としては、賞味期限の文字のほかに、例えば、産卵日や生産者名やブランド名等の文字がある。
【0019】
印字装置3は、図2に示すように、搬送装置4と、レーザ発振器31と、走査機構部としてのスキャナミラー機構部32と、集光レンズ35とを備える。搬送装置4は、前述の通り、10個の鶏卵8が載置されたトレイ7を搬送方向Pに搬送する。搬送装置4は、鶏卵8の第1方向D1の位置を検出する位置検出部としてのロータリーエンコーダ39を有する。ロータリーエンコーダ39は、駆動ローラ42の回転軸に設けられる不図示のスリット板と、不図示のフォトセンサと、により構成される光学式センサである。ロータリーエンコーダ39からの出力パルスは、後述する制御部36に出力される。後述する制御部36は、ロータリーエンコーダ39から出力された鶏卵8の位置情報に基づいて、レーザビームを照射するタイミングや、スキャナミラー機構部32の動作を制御する。
【0020】
レーザ発振器31は、1つのレーザヘッド31aを有する。1つのレーザヘッド31aは、所定の径を有する1本のレーザビームを出射する。1つのレーザヘッド31aから出射されるレーザビームは、スキャナミラー機構部32により走査されることで、鶏卵8の頂部の表面に賞味期限等の文字を印字する。また、1本のレーザビームの所定の径は、鶏卵8の表面を走査することにより、鶏卵8の表面に賞味期限等の文字を印字可能な径である。そのため、1つのレーザヘッド31aから出射される1本のレーザビームは、2個以上の鶏卵8を同時に照射することはない。
【0021】
スキャナミラー機構部32は、1つのレーザヘッド31aから出射されるレーザビームを、レーザビームの走査範囲S内で、第1方向D1及び第2方向D2に走査する。第1方向D1及び第2方向D2に走査されたレーザビームは、鶏卵8の頂部に賞味期限等を印字することができる。
スキャナミラー機構部32は、例えば、単にスキャナミラーと呼ばれたり、ガルバノスキャナと呼ばれることもある。
【0022】
スキャナミラー機構部32は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、レーザ発振器31と印字位置に位置した2個の鶏卵8,8との間に配置される。ここで、2個の鶏卵8,8の印字位置とは、1つのレーザヘッド31aから出射されるレーザビームの走査範囲S内に、第2方向D2に並ぶ2個の鶏卵8,8の頂部が位置する位置である。本実施形態においては、第2方向D2に並ぶ2個の鶏卵8,8は、搬送装置4により搬送されることにより、印字位置に移動される。
【0023】
スキャナミラー機構部32は、第1方向走査部33と、第2方向走査部34とを有する。
第1方向走査部33は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第2方向走査部34よりもレーザ発振器31側に配置される。
第1方向走査部33は、第1ミラー33aと、第1ミラー駆動モータ33bとを有する。
【0024】
第1ミラー33aは、1つのレーザヘッド31aから出射されるレーザビームを第2方向走査部34の第2ミラー34a(後述)に向けて反射させると共に、第1回転軸J1を中心に回動することで、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1に沿う方向に走査するミラーである。
【0025】
第1ミラー33aは、レーザビームを反射させる反射面を有する。第1ミラー33aの反射面は、レーザヘッド31aから出射されるレーザビームを第2ミラー34aに向けて反射させるように、レーザヘッド31a及び第2ミラー34aに対して所定角度傾いて面している。第1ミラー33aは、反射面の角度を変化させるように第1回転軸J1を中心に回動可能に構成される。第1回転軸J1は、Z方向に延びる回転軸である。
【0026】
第1ミラー駆動モータ33bは、出力軸33cが第1ミラー駆動モータ33bの回転駆動力を第1ミラー33aに伝達して、第1ミラー33aを第1回転軸J1を中心に回動させる。これにより、第1ミラー駆動モータ33bは、第1ミラー33aの反射面の角度を変化させて、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1に走査する。
【0027】
第2方向走査部34は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第1方向走査部33よりも印字位置に位置する鶏卵8側に配置される。
第2方向走査部34は、第2ミラー34aと、第2ミラー駆動モータ34bとを有する。
【0028】
第2ミラー34aは、印字位置に位置する2個の鶏卵8,8のZ方向の上方側に配置される。第2ミラー34aは、第1方向走査部33により反射されるレーザビームを印字位置に位置する鶏卵8のZ方向の上方側から2個の鶏卵8,8の頂部に向けて反射させると共に、第2回転軸J2を中心に回動することで、1つのレーザヘッド31aから出射されて第1方向走査部33により反射されるレーザビームを第2方向D2に走査するミラーである。
【0029】
第2ミラー34aは、レーザビームを反射させる反射面を有する。第2ミラー34aの反射面は、第1ミラー33aにより反射されて照射されるレーザビームを印字位置に位置する鶏卵8に向けて反射させるように、第1ミラー33a及び印字位置に位置する2個の鶏卵8,8に対して所定角度傾いて面している。第2ミラー34aは、反射面の角度を変化させるように第2回転軸J2を中心に回動可能に構成される。第2回転軸J2は、第1回転軸J1に直交すると共に第1方向D1に延びる回転軸である。
【0030】
第2ミラー駆動モータ34bは、出力軸34cが第2ミラー駆動モータ34bの回転駆動力を第2ミラー34aに伝達して、第2ミラー34aを第2回転軸J2を中心に回動させる。これにより、第2ミラー駆動モータ34bは、第2ミラー34aの反射面の角度を変化させて、1つのレーザヘッド31aから出射されるレーザビームを第2方向D2に走査する。
【0031】
集光レンズ35は、1つのレーザヘッド31aから出射されるレーザビームの光路上において、第2方向走査部34と印字位置に位置する2個の鶏卵8,8との間に配置される。集光レンズ35は、第2ミラー34aに反射されたレーザビームを集光して、2個の鶏卵8,8のうちの一方又は他方の鶏卵8にレーザビームを照射する。
【0032】
以上のように、1つのレーザヘッド31aから出射されるレーザビームの光路上には、レーザヘッド31aから印字位置に位置する2個の鶏卵8,8までの間に、レーザヘッド31a、第1方向走査部33、第2方向走査部34、集光レンズ35及び2個の鶏卵8,8が、この順に並んで配置されている。
これにより、1つのレーザヘッド31aから出射されたレーザビームは、第1方向走査部33の第1ミラー33aによって反射された後、さらに第2方向走査部34の第2ミラー34aによって反射され、集光レンズ35を介して、印字位置に位置する2個の鶏卵8,8のうちの一方又は他方の鶏卵8に照射される。
【0033】
また、スキャナミラー機構部32は、第1ミラー駆動モータ33bによって第1ミラー33aを回動させ、かつ、第2ミラー駆動モータ34bによって第2ミラー34aを回動させる。これにより、1つのレーザヘッド31aから出射されたレーザビームは、第1方向走査部33が第1ミラー33aを回動させることにより第1方向D1に走査され、第2方向走査部34が第2ミラー34aを回動させることにより第2方向D2に走査される。
【0034】
レーザビームの走査範囲Sは、図2に示すように、レーザビームが第1方向D1に走査可能な範囲と、レーザビームが第2方向D2に走査可能な範囲とで囲まれる範囲である。
本実施形態においては、レーザビームの走査範囲Sは、第2方向D2に並ぶ2個の鶏卵8,8が印字位置にある場合において、Z方向の上方側から視た場合に、少なくとも、第2方向D2に並ぶ2個の鶏卵8,8の頂部の部分を含む範囲となるように設定されている。
なお、レーザビームの走査範囲Sは、スキャナミラー機構部32の構成やスキャナミラー機構部32から鶏卵8までの距離やスキャナミラー機構部32の制御の設定等によって所定の範囲に設定される。
【0035】
以上のように構成されることにより、スキャナミラー機構部32は、レーザビームの走査範囲Sにおいて、1つのレーザヘッド31aから出射されたレーザビームを、第2方向D2に並んだ2個の鶏卵8,8のうちの一方又は他方の鶏卵8のいずれにも走査させることができる。つまり、第2方向D2に並んだ2個の鶏卵8,8のうちの一方側に配置された鶏卵8に印字を行う場合にはレーザビームを一方側に配置された鶏卵8側に走査し、他方側に配置された鶏卵8に印字を行う場合にはレーザビームを他方側に配置された鶏卵8側に走査することにより、第2方向D2に並んだ2個の鶏卵8,8のそれぞれに印字することができる。
【0036】
また、スキャナミラー機構部32は、レーザビームの走査範囲Sにおいて、1つのレーザヘッド31aから出射されたレーザビームを第1方向D1及び第2方向D2に走査可能である。そのため、1つのレーザヘッド31aから出射されたレーザビームは、レーザビームの走査範囲Sに位置する鶏卵8の頂部の任意の位置において、任意の文字を印字することができる。
【0037】
図3に示すように、印字装置3は、上記の構成の他に、制御部36と、記憶部37と、操作部38とを備える。
制御部36は、印字装置3を統括的に制御するための制御部であり、例えばCPU等から構成される。制御部36は、記憶部37に記憶された各種プログラムや印字に関する文字の画像情報等を適宜読み出して実行することにより、前述したレーザ発振器31やスキャナミラー機構部32等のハードウェアと協働し、本発明に係る各種機能を実現している。
また、制御部36は、1つのレーザヘッド31aから出射されるレーザビームが走査範囲S(第2方向D2に並ぶ2個の鶏卵8,8の頂部を含む範囲)を走査して文字を印字するようにスキャナミラー機構部32を制御する。
また、制御部36は、記憶部37に記憶された賞味期限等の文字の画像情報を、鶏卵8の表面に効率的に印字するように、スキャナミラー機構部32を制御する。
また、制御部36は、操作部38により入力された日付等の文字の情報を画像情報に変換する。
【0038】
記憶部37は、本実施形態の印字装置3を動作させるための制御プログラムや印字に関する文字の画像情報等を予め記憶している。具体的には、記憶部37は、例えば、鶏卵8に印字する印字内容のタイトル(例えば「賞味期限」など)の文字の画像情報を記憶する。
操作部38は、作業者等が、賞味期限の日時等の数値を入力するテンキー等や鶏卵8に印字する印字内容を選択する選択キー等を備える入力装置である。操作部38は、制御部36に接続されている。操作部38により入力された賞味期限の日時等の情報は、制御部36により画像情報に変換されて記憶部37に記憶される。
【0039】
次に、包装装置1の動作について説明する。
まず、卵載置装置2は、10個の鶏卵8を立てた状態で2列に並べてトレイ7に載置する。10個の鶏卵8が載置されたトレイ7は、搬送装置4により、印字装置3に向けて搬送される。
印字装置3に搬送された2列に並ぶ10個の鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、図2に示すように、印字位置に搬送される。2個の鶏卵8,8の印字位置とは、1つのレーザヘッド31aから出射されるレーザビームの走査範囲S内に、第2方向D2に並ぶ2個の鶏卵8,8の頂部が位置する位置である。レーザビームの走査範囲Sとは、1つのレーザヘッド31aから出射されるレーザビームが走査可能な範囲である。
【0040】
本実施形態においては、鶏卵8の頂部への印字は、搬送装置4によりトレイ7が搬送されている途中に、鶏卵8が載置されたトレイ7の移動中に行われる。
【0041】
2列に並ぶ鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、不図示の光センサに検知されることにより、所定位置に位置することが検知される。また、先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8は、ロータリーエンコーダ39により、第1方向D1の位置を検出する。
先頭の2個の鶏卵8,8が所定位置に位置することが光センサにより検知されると、制御部36は、光センサによる検知信号及びロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、2個の鶏卵8,8の頂部が、第2ミラー34aのZ方向の下方側に位置するタイミングを算出する。そして、制御部36は、その算出されたタイミングに基づいて、1つのレーザヘッド31aがレーザビームを出射するようにレーザ発振器31を制御する。
【0042】
制御部36は、レーザビームの走査範囲Sにおいて、記憶部37に記憶された画像情報や搬送装置4の搬送速度の情報等に基づいて、第2方向D2に並ぶ2個の鶏卵8,8の頂部のうちの一方又は他方の鶏卵8のそれぞれを走査するように、スキャナミラー機構部32を制御する。記憶部37には、鶏卵8に印字する印字内容のタイトルや作業者により操作部38から入力された賞味期限の日時等の情報から変換された画像情報等が記憶されている。
【0043】
1つのレーザヘッド31aから出射されるレーザビームは、スキャナミラー機構部32に走査されることで、2列の鶏卵8,8の先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれに賞味期限等の文字を印字する。第2方向D2に並ぶ2個の鶏卵8,8それぞれへの賞味期限等の印字は、レーザビームが第2方向D2に並ぶ2個の鶏卵8,8のうちの一方又は他方の鶏卵8の頂部それぞれを走査することで、略同時期に行われる。
【0044】
ここで、「略同時期」とは、第2方向D2に並ぶ2個の鶏卵8,8それぞれが搬送方向Pに移動する場合に、第2方向D2に並ぶ2個の鶏卵8,8それぞれがレーザビームの走査範囲S内に位置する間に、第2方向D2に並ぶ2個の鶏卵8,8それぞれへの印字を完了させることができる程度の同時期という意味である。
【0045】
そのため、制御部36は、第2方向D2に並ぶ2個の鶏卵8,8に対して、効率的に印字が行われるように、スキャナミラー機構部32を制御することが好ましい。制御部36は、搬送方向Pに移動中の第2方向D2に並ぶ2個の鶏卵8,8に対して、レーザビームの走査範囲Sを通り過ぎる前に、第2方向D2に並ぶ2個の鶏卵8,8の頂部をレーザビームで走査して印字を完了させればよい。例えば、制御部36は、第2方向D2に並ぶ2個の鶏卵8,8に対して、一方の鶏卵8に印字した後に他方の鶏卵8に印字するように制御してもよいし、一方及び他方の鶏卵8,8それぞれを交互に走査して印字するように制御してもよい。
【0046】
また、スキャナミラー機構部32は、レーザビームを第1方向D1及び第2方向D2に走査可能である。そのため、制御部36は、レーザビームの走査範囲Sに位置する鶏卵8の頂部の任意の位置において、任意の文字を印字するように制御することができる。つまり、レーザビームを第1方向D1及び第2方向D2に走査することにより、2列に並ぶ鶏卵8のうちの所定番目の第2方向D2に並ぶ2個の鶏卵8,8に対して、2個のうちのいずれの鶏卵8からでも印字を行うことができるし、印字を行う文字の画像情報の上下左右のいずれの側からでも印字を行うことができる。
【0047】
2列の鶏卵8の先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8の頂部への印字後、トレイ7は、更に搬送方向Pに搬送される。そして、印字位置に移動された順に、第2方向D2に並ぶ2個の鶏卵8,8ごとに、第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれにレーザビームを走査して印字を行う。そして、先頭の2個の鶏卵8,8から5番目の2個の鶏卵8,8まで順次印字が完了することにより、2列に並ぶ10個の鶏卵8への印字が完了する。
このように、1つのレーザヘッド31aから出射されるレーザビームをスキャナミラー機構部32で第2方向D2に走査するだけの簡易な構成で、第2方向D2に並ぶ2個の鶏卵8,8ごとに頂部それぞれに略同時期に印字することができる。そして、トレイ7に載置された2列に並ぶ10個の鶏卵8を搬送方向Pに移動させて、第2方向D2に並ぶ2個の鶏卵8,8の頂部それぞれに順次印字することで、2列に並ぶ10個の鶏卵8に印字することができる。
【0048】
印字装置3により印字された10個の鶏卵8は、トレイ7に載置された状態で、搬送装置4により搬送される。その後、10個の鶏卵8が載置されたトレイ7には蓋がかぶせられ、10個の鶏卵8は、トレイ7に載置された状態で包装され、出荷される。
【0049】
本実施形態の印字装置3によれば、例えば、以下の効果が奏される。
本実施形態の印字装置3においては、トレイ7に立てられた状態で載置される10個の鶏卵8の頂部に印字する印字装置3であって、10個の鶏卵8は、第1方向D1に5個並ぶ一列が第1方向D1に直交する第2方向D2に2列並んだ状態でトレイ7に載置されており、レーザビームを出射する1つのレーザヘッド31aと、1つのレーザヘッド31aから出射されるレーザビームを第1方向D1及び第2方向D2に走査することで、レーザビームにより鶏卵8の頂部に印字させる走査機構部32と、1つのレーザヘッド31aから出射されるレーザビームが第2方向D2に並ぶ2個の鶏卵8,8の頂部を含む範囲を走査するように走査機構部32を制御する制御部36と、を備える。
【0050】
そのため、1つのレーザヘッド31aから出射されるレーザビームを走査することで、第2方向D2に並ぶ2個の鶏卵8,8の頂部に、略同時期に、印字することができる。これにより、レーザビームで走査するだけの簡易な構成で、2列に並んだ10個の鶏卵8に印字することができる。
【0051】
また、一般的に市場で流通しているトレイ7を利用して、2列に並んだ10個の鶏卵8をトレイ7に載置した状態で鶏卵8に印字することができる。そのため、10個の鶏卵8を整列させるための設備や作業等を必要せずに、10個の鶏卵8に印字することができる。従って、2列に並んだ10個の鶏卵8がトレイ7に載置されたそのままの状態で、10個の鶏卵8に効率よく印字することができる。
【0052】
また、賞味期限等の文字の画像情報を印字するに際して、レーザビームを第1方向D1及び第2方向D2に走査することにより、第2方向D2に並ぶ2個の鶏卵8,8に対して、2個のうちのいずれの鶏卵8からでも印字することができるし、印字する画像情報の上下左右のいずれの側からでも印字することができる。従って、第2方向D2に並ぶ2個の鶏卵8,8に効率よく印字することができる。
【0053】
また、第2方向D2に並ぶ2個の鶏卵8,8に対して1つのレーザヘッド31aで印字できるため、1個の鶏卵8に対して1つのレーザヘッドを設けなくてもよい。これにより、第2方向D2に2列並ぶ鶏卵8に対応させてレーザヘッドを2つ設ける場合に比べて、レーザヘッドに要するコストを軽減することができる。
また、1つのレーザヘッド31aを設けるだけでよいため、2つのレーザヘッドを設ける場合よりも、印字装置3の内部の省スペース化を実現することができる。
【0054】
また、本実施形態の印字装置3においては、トレイ7に載置された複数の鶏卵8を第1方向D1に搬送する搬送装置4を備える。
そのため、10個の鶏卵8は、トレイ7に載置された状態で搬送方向Pに移動される。これにより、先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8から5番目に位置する第2方向D2に並ぶ2個の鶏卵8,8まで、順次印字することができる。従って、トレイ7が搬送方向Pに搬送される動作に追従させて、トレイ7に載置された2列に並ぶ10個の鶏卵8に対して効率よく印字することができる。
【0055】
次に、本発明の印字装置3の他の実施形態としての第2実施形態及び第3実施形態について、図面を参照しながら説明する。なお、第2実施形態及び第3実施形態の説明にあたって、第1実施形態と同一の構成要件については同一の符号を付し、その説明を省略又は簡略化する。図4は、第2実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【0056】
第2実施形態の印字装置3の制御部36は、第1実施形態の印字装置3と比べて、第1実施形態の制御部36の機能に加えて、次の機能を有する。
第2実施形態の制御部36は、8個の鶏卵8のうちの1つの鶏卵8の頂部に印字する際に、交点Cを基準として、鶏卵8の頂部に印字するように、スキャナミラー機構部32を制御する。交点Cは、1つのレーザヘッド31aから出射されるレーザビームBが延びる方向である照射方向と同一方向に延びる仮想線Hが鶏卵8の中心Oを通る場合において、仮想線Hと鶏卵8の表面との交点である。
【0057】
これにより、図4に示すように、印字装置3は、第1方向D1に視た場合に、第2方向D2において、鶏卵8の頂点8aよりもスキャナミラー機構部32側(鶏卵8の頂点8aからトレイ7の第2方向D2の中央側にずれた位置)に位置する交点Cを中心に、その周辺に印字することができる。
【0058】
ここで、レーザビームBの照射方向が、鶏卵8における印字する部分の接線Tを含む面に対して90度に近い角度であるほど、鶏卵8における印字する部分がレーザビームBの照射に対して傾斜が少ない状態で対面するため、印字の品質は、向上する。一方、レーザビームBの照射方向が、鶏卵8における印字する部分の接線Tを含む面に対して0度又は180度に近い角度であるほど、鶏卵8における印字する部分の接線Tを含む面がレーザビームBの照射方向に平行に近くなるため、印字の品質は、低下する。
本実施形態においては、この交点Cにおいては、レーザビームBの照射方向は、交点Cの接線Tを含む面に対して、角度が90度に近い。そのため、交点Cにおける接線Tを含む面は、レーザビームBの照射に対して、傾斜が少ない状態で対面する。
そして、印字装置3は、交点Cを基準として、交点Cを中心に、鶏卵8の曲面に沿う上下方向Zに文字列81の上下方向が沿うように印字することができる。従って、印字装置3は、レーザビームBの照射方向が交点Cの接線Tを含む面に対して90度に近い角度で印字することができる。これにより、印字する文字の品質を向上させることができる。
【0059】
第2実施形態の印字装置3によれば、第1実施形態の印字装置3が奏する効果の他に、以下のような効果が奏される。
制御部36は、8個の鶏卵8のうちの1つの鶏卵8の頂部に印字する際に、交点Cを基準として、鶏卵8の頂部に印字するように、スキャナミラー機構部32を制御する。交点Cは、1つのレーザヘッド31aから出射されるレーザビームBの照射方向と同一方向に延びる仮想線Hが鶏卵8の中心Oを通る場合において、仮想線Hと鶏卵8の表面との交点である。そのため、レーザビームBの照射方向は、交点Cの接線Tを含む面に対して、角度が90度に近い。従って、鶏卵8に印字する文字の品質を向上させることができる。
【0060】
次に、本発明の第3実施形態について説明する。図5は、第3実施形態の印字装置3における鶏卵8に印字する制御について説明する図である。
【0061】
第3実施形態の印字装置3の制御部36は、第1実施形態の印字装置3と比べて、第1実施形態及び第2実施形態の制御部36の機能に加えて、次の機能を有する。
第3実施形態の制御部36は、第1方向D1の上流側から下流側に向けて搬送される8個の鶏卵8のうちの1つの鶏卵8に印字する際に、ロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、1つの鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字するように、スキャナミラー機構部32を制御する。具体的には、制御部36は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字するように、スキャナミラー機構部32を制御する。
【0062】
詳細には、印字装置3は、搬送ベルト41により搬送される鶏卵8の表面に、次のように印字する。
まず、図5(a)に示すように、制御部36は、搬送ベルト41により搬送される先頭の鶏卵8について、ロータリーエンコーダ39により検出された鶏卵8の位置情報に基づいて、スキャナミラー機構部32よりも搬送方向Pの上流側を搬送される鶏卵8に対して、1つのレーザヘッド31aから出射されるレーザビームを照射するように、スキャナミラー機構部32を制御する。スキャナミラー機構部32よりも搬送方向Pの上流側を搬送される鶏卵8に対しては、鶏卵8の表面の搬送方向Pの最も下流側から印字を開始する。言い換えると、印字装置3は、鶏卵8の表面に文字列81を印字する場合において、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方を通過する前に、搬送ベルト41を搬送される鶏卵8を迎えにいくようにして、鶏卵8の表面の搬送方向Pの最も下流側の部分から印字を開始する。
【0063】
次に、印字装置3は、鶏卵8が搬送方向Pの上流側からスキャナミラー機構部32の垂直方向Zの下方に向けて搬送されるタイミングに追従させて、鶏卵8の表面の搬送方向Pの下流側から略中央部に向かって順に印字を行う。そして、図5(b)に示すように、印字装置3は、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に位置するときには、鶏卵8の表面の搬送方向Pの略中央部に印字を行う。
【0064】
次に、印字装置3は、鶏卵8がスキャナミラー機構部32の垂直方向Zから下流側に搬送されるタイミングに追従させて、鶏卵8の表面の搬送方向の略中央部から上流側に順に印字を行う。そして、図5(c)に示すように、印字装置3は、スキャナミラー機構部32の垂直方向Zよりも搬送方向Pの下流側において、印字する文字列81における鶏卵8の表面の搬送方向Pの最も上流側の部分において印字を終了する。
【0065】
そのため、印字装置3は、レーザビームの照射方向と、鶏卵8における印字する部分の接線を含む面とのなす角度が90度に近くなるように保持しながら、鶏卵8の第1方向D1への移動に追従して、鶏卵8の表面の搬送方向Pにおける下流側から上流側に向けて印字することができる。つまり、鶏卵8における印字する部分の接線を含む面は、鶏卵8が第1方向D1へ移動している間において、レーザビームの照射方向に対して傾斜が少ない状態で、レーザビームに対面する。
これにより、印字装置3は、鶏卵8の表面における上流側の端部側及び下流側の端部側において、印字する部分の接線を含む面がレーザビームの照射方向に対して平行に近くならない状態で、印字を行うことができる。よって、印字装置3は、文字の形状が歪むことを軽減して、鶏卵8に印字できる。従って、印字の品質を向上させることができる。
【0066】
また、印字装置3は、スキャナミラー機構部32の垂直方向Zの下方に到達する前から印字を開始して、鶏卵8を搬送しながら印字を進めて、スキャナミラー機構部32の垂直方向Zの下方に到達した後に印字を終了する。そのため、鶏卵8の表面に搬送方向Pに長い文字列81を印字する場合に、搬送ベルト41により搬送される鶏卵8の移動速度が比較的速い場合において、スキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、搬送方向Pに長い文字列81の印字を終了できないということが軽減される。
【0067】
また、印字装置3は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字する。そのため、レーザヘッド31aから鶏卵8の表面までの距離の変化が少ない。これにより、レーザビームの出力の強度を一定にしたままで、印字の品質を向上させることができる。その結果、視認性のよい文字を印字することができる。
【0068】
また、第1方向D1に搬送される鶏卵8の表面に第1方向D1に長い文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、スキャナミラー機構部の第1方向D1の走査角度を小さくできる。そのため、印字装置3は、搬送方向Pの長さが同じ文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、時間をかけて印字することができる。これにより、印字装置3は、レーザビームの出力が小さい場合であっても、鶏卵8の表面に安定して印字することができる。
【0069】
次に、印字装置3は、先頭の鶏卵8への印字が終了した後、10個の鶏卵8が搬送方向Pに搬送されるのに伴って、2番目の鶏卵8から5番目の鶏卵8まで順に、先頭の鶏卵8への印字と同様に印字を行う。
【0070】
また、第3実施形態の印字装置3においても、前述の第1実施形態と同様に、第2方向D2に並ぶ2列の鶏卵8,8それぞれに対して印字を行うことができる。つまり、第3実施形態の印字装置3は、2列に並ぶ10個の鶏卵8のうちの先頭に位置する第2方向D2に並ぶ2個の鶏卵8,8に対して、同時期に印字を行うことができる。
これにより、印字装置3は、第2方向D2に並ぶ2個の鶏卵8,8のうちの一方側の鶏卵8又は他方側の鶏卵8に対して、同時期にレーザビームを第2方向D2に交互に走査し、かつ、搬送方向Pに搬送される際に、第2方向D2に並ぶ2個の鶏卵8,8それぞれに対して、鶏卵8の表面の搬送方向Pにおける下流側から上流側に向かって文字列81を印字することができる。
【0071】
第3実施形態の印字装置3によれば、第1実施形態及び第2実施形態の印字装置3が奏する効果の他に、以下のような効果が奏される。
印字装置3には、ロータリーエンコーダ39が設けられている。そのため、制御部36は、ロータリーエンコーダ39により検出された鶏卵8の第1方向D1の位置情報に基づいて、鶏卵8の第1方向D1への移動に追従して、1つの鶏卵8の表面の搬送方向Pにおける下流側から上流側に向かって印字することができる。
これにより、鶏卵8における印字する部分の接線を含む面は、レーザビームの照射に対して傾斜が少ない状態で、レーザビームに対面する。よって、印字装置3は、文字の形状が歪むことを軽減して、鶏卵8に印字できる。従って、印字の品質を向上させることができる。
【0072】
また、搬送ベルト41により搬送される鶏卵8の移動速度が比較的速い場合において、搬送方向Pの長さが同じ文字列81を印字する場合に、スキャナミラー機構部32の垂直方向Zの下方に到達してから鶏卵8に印字を開始する場合に比べて、搬送方向Pに長い文字列81の印字を終了できないということが軽減される。
【0073】
また、印字装置3は、第1方向D1の上流側から下流側に向けて搬送される鶏卵8の移動に追従させて、鶏卵8の表面における第1方向D1の下流側から上流側に向かって印字する。そのため、レーザヘッド31aから鶏卵8の表面までの距離の変化が少ない。これにより、レーザビームの出力の強度を一定にしたままで、印字の品質を向上させることができる。その結果、視認性のよい文字を印字することができる。
【0074】
また、搬送方向Pの長さが同じ文字列81を印字する場合に、鶏卵8がスキャナミラー機構部32の垂直方向Zの下方に到達してから印字を開始する場合に比べて、時間をかけて印字することができる。これにより、印字装置3は、レーザビームの出力が小さい場合であっても、鶏卵8の表面に安定して印字することができる。これにより、印字の品質を向上させることができる。
【0075】
以上、好適な実施形態について説明したが、本発明は前述した実施形態に限定されることなく種々の形態で実施することができる。
例えば、前述の実施形態においては、第2方向D2に2列並んだ状態でトレイ7に載置される10個の鶏卵8に印字するように構成したが、これに制限されない。例えば、第2方向D2に3列以上並んだ状態でトレイに載置される複数の鶏卵8に印字するように構成してもよい。この場合には、レーザビームの走査範囲Sを鶏卵8の列の数に対応させることで、1つのレーザヘッド31aで3列以上に並んだ複数の鶏卵8に印字することができる。
【0076】
また、前述の実施形態においては、複数の鶏卵8への印字を、トレイ7の移動中に行っているが、これに制限されない。複数の鶏卵8への印字は、例えば、トレイ7を停止した状態で行ってもよい。
本発明の印字装置3によって印字される卵は、鶏卵に制限されず、例えば、うずらの卵でもよい。
【符号の説明】
【0077】
3 印字装置
7 トレイ
8 鶏卵(卵)
31a レーザヘッド
32 スキャナミラー機構部(走査機構部)
39 ロータリーエンコーダ(位置検出部)
51 制御部
D1 第1方向
D2 第2方向
【特許請求の範囲】
【請求項1】
トレイに立てられた状態で載置される複数の卵の頂部に印字する印字装置であって、
前記複数の卵は、第1方向に複数個並ぶ一列が前記第1方向に直交する第2方向に複数列並んだ状態で前記トレイに載置されており、
レーザビームを出射する1つのレーザヘッドと、
前記1つのレーザヘッドから出射されるレーザビームを前記第1方向及び前記第2方向に走査することで、レーザビームにより前記卵の頂部に印字させる走査機構部と、
前記1つのレーザヘッドから出射されるレーザビームが前記第2方向に並ぶ複数の卵の頂部を含む範囲を走査するように前記走査機構部を制御する制御部と、を備える
印字装置。
【請求項2】
前記制御部は、前記複数の卵のうちの1つの卵の頂部に印字する際に、前記1つのレーザヘッドから出射されるレーザビームが延びる方向である照射方向と同一方向に延びる仮想線が卵の中心を通る場合における前記仮想線と前記1つの卵の表面との交点を基準として、前記卵の頂部に印字するように、前記走査機構部を制御する
請求項1に記載の印字装置。
【請求項3】
前記トレイに載置された前記複数の卵を前記第1方向に搬送する搬送装置を備える
請求項1又は2に記載の印字装置。
【請求項4】
前記搬送装置により搬送される前記複数の卵の前記第1方向の位置を検出する位置検出部を更に備え、
前記制御部は、前記第1方向の上流側から下流側に向けて搬送される前記複数の卵のうちの1つの卵に印字する際に、前記位置検出部により検出された前記1つの卵の位置情報に基づいて、前記1つの卵の表面における前記第1方向の下流側から上流側に向かって印字するように、前記走査機構部を制御する
請求項3に記載の印字装置。
【請求項1】
トレイに立てられた状態で載置される複数の卵の頂部に印字する印字装置であって、
前記複数の卵は、第1方向に複数個並ぶ一列が前記第1方向に直交する第2方向に複数列並んだ状態で前記トレイに載置されており、
レーザビームを出射する1つのレーザヘッドと、
前記1つのレーザヘッドから出射されるレーザビームを前記第1方向及び前記第2方向に走査することで、レーザビームにより前記卵の頂部に印字させる走査機構部と、
前記1つのレーザヘッドから出射されるレーザビームが前記第2方向に並ぶ複数の卵の頂部を含む範囲を走査するように前記走査機構部を制御する制御部と、を備える
印字装置。
【請求項2】
前記制御部は、前記複数の卵のうちの1つの卵の頂部に印字する際に、前記1つのレーザヘッドから出射されるレーザビームが延びる方向である照射方向と同一方向に延びる仮想線が卵の中心を通る場合における前記仮想線と前記1つの卵の表面との交点を基準として、前記卵の頂部に印字するように、前記走査機構部を制御する
請求項1に記載の印字装置。
【請求項3】
前記トレイに載置された前記複数の卵を前記第1方向に搬送する搬送装置を備える
請求項1又は2に記載の印字装置。
【請求項4】
前記搬送装置により搬送される前記複数の卵の前記第1方向の位置を検出する位置検出部を更に備え、
前記制御部は、前記第1方向の上流側から下流側に向けて搬送される前記複数の卵のうちの1つの卵に印字する際に、前記位置検出部により検出された前記1つの卵の位置情報に基づいて、前記1つの卵の表面における前記第1方向の下流側から上流側に向かって印字するように、前記走査機構部を制御する
請求項3に記載の印字装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−111070(P2013−111070A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−263415(P2011−263415)
【出願日】平成23年12月1日(2011.12.1)
【出願人】(390034223)イーデーエム株式会社 (23)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年12月1日(2011.12.1)
【出願人】(390034223)イーデーエム株式会社 (23)
【Fターム(参考)】
[ Back to top ]