
危険判定装置及びプログラム
【課題】可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができるようにする。
【解決手段】可動物進入可能性マップのブロックに格納された可動物粒子の移動状態を、ランダムデータに基づいて変更して、各可動物粒子が格納されるブロックを移動させることを繰り返し行う。各可動物粒子の移動により、遷移制約を受ける領域のブロックに格納された場合、可動物粒子を消滅させると共に、同じ可動物の可動物粒子を複製して、同じ可動物の他の可動物粒子が格納されたブロック又はその周辺のブロックに、複製された可動物粒子を格納する。他の可動物の可動物粒子と重複したことにより消滅した可動物粒子の組み合わせの消滅位置を示す消滅情報を記録する。記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
【解決手段】可動物進入可能性マップのブロックに格納された可動物粒子の移動状態を、ランダムデータに基づいて変更して、各可動物粒子が格納されるブロックを移動させることを繰り返し行う。各可動物粒子の移動により、遷移制約を受ける領域のブロックに格納された場合、可動物粒子を消滅させると共に、同じ可動物の可動物粒子を複製して、同じ可動物の他の可動物粒子が格納されたブロック又はその周辺のブロックに、複製された可動物粒子を格納する。他の可動物の可動物粒子と重複したことにより消滅した可動物粒子の組み合わせの消滅位置を示す消滅情報を記録する。記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、危険判定装置及びプログラムに係り、特に、可動物同士の衝突の危険性を判定する危険判定装置及びプログラムに関する。
【背景技術】
【0002】
従来より、可動物間の衝突確率を考慮して、走行環境の死角や可動物に起因する危険要因を推定しながら、危険度を判定して運転支援を行なう運転支援装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−217692号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1に記載の技術では、衝突判定を物体間の組み合わせ数だけ行う必要があり、可動物の数が増えるほど衝突確率計算の計算時間が増大してしまう、という問題がある。
【0005】
本発明は、上記の問題点を解決するためになされたもので、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる危険判定装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するために本発明に係る危険判定装置は、判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段と、前記可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段と、前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段と、前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段と、前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段と、前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段とを含んで構成されている。
【0007】
また、本発明に係るプログラムは、コンピュータを、判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段、前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段、前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段、前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段、及び前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段として機能させるためのプログラムである。
【0008】
本発明によれば、可動物検出手段によって、判定対象範囲から、可動物及び前記可動物の移動状態を検出する。データ生成手段によって、可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、判定対象範囲を分割した複数のブロックで表されると共に、ブロックに静止物の存在が記録された地図情報において、可動物検出手段によって検出された可動物の位置に対応するブロックに、生成された可動物データを格納する。
【0009】
そして、データ移動手段によって、地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、変更された移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行う。データ更新手段によって、データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、生成された可動物データを格納し、各可動物データの移動により、可動物データが、静止物が存在するブロックに格納された場合、可動物データを消滅させると共に、対応する可動物の可動物データを生成し、対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、生成された可動物データを格納する。また、データ更新手段において消滅した可動物データの組み合わせの消滅位置と、可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録手段に記録する。
【0010】
そして、判定手段によって、記録手段によって記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
【0011】
このように、各可動物データの移動を繰り返し行う毎に、可動物データの消滅及び生成を行って可動物データを更新し、消滅した可動物データの組み合わせの消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる。
【0012】
本発明に係るデータ生成手段は、可動物検出手段によって検出された可動物の可動物データを生成してブロックに格納すると共に、地図情報において、静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、特定された死角領域内に存在すると想定される可動物の可動物データを生成し、特定された死角領域内のブロックに、生成された可動物データを格納することができる。これによって、死角領域内に存在すると想定される可動物との衝突の危険性を判定することができる。
【0013】
本発明に係る可動物検出手段は、可動物及び可動物の移動状態と共に、可動物の種類を検出し、データ生成手段は、検出された移動状態及び可動物の種類を含む可動物データを生成して、ブロックに格納し、データ更新手段は、データ移動手段による各可動物データの移動が行われる毎に、更に、可動物の種類の各々について、可動物の種類が移動する領域でないブロックに格納された可動物の種類の可動物データを消滅させると共に、消滅させた分だけ、同じ可動物の可動物データを生成し、可動物の種類が移動する領域内の、同じ可動物の可動物データが格納されたブロック、又は該ブロックの周囲のブロックに、生成された可動物データを格納することができる。これによって、可動物の種類に応じて、移動する領域でないブロックに格納された可動物データを消滅させるように可動物データを更新することができる。
【0014】
また、上記の可動物の種類を考慮した発明におけるデータ生成手段は、可動物検出手段によって検出された可動物の可動物データを生成してブロックに格納すると共に、地図情報において、静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、判定対象範囲の可動物の移動環境を検出する環境検出手段によって検出された移動環境のうちの特定された死角領域の周辺の移動環境、又は特定された死角領域の位置に基づいて、特定された死角領域内に存在すると想定される可動物の種類を推定して、推定された可動物の種類を含む可動物データを生成し、特定された死角領域内のブロックに、生成された前記可動物データを格納することができる。これによって、死角領域内に存在すると想定される可動物の種類を考慮して、死角領域内に存在すると想定される可動物との衝突の危険性を判定することができる。
【0015】
上記のデータ生成手段は、可動物である判定対象物の可動物データを更に生成し、地図情報において、判定対象物の位置に対応するブロックに、判定対象物の可動物データを格納し、判定手段は、記録手段によって記録された消滅情報のうち、判定対象物の可動物データとの組み合わせで消滅したことを記録した消滅情報の消滅位置に基づいて、判定対象物が他の可動物と衝突する危険性がある位置を判定することができる。
【0016】
上記の発明に係る危険判定装置は、判定対象範囲に存在する物体の位置を検出する物体位置検出手段と、判定対象物の運動を推定する運動推定手段と、前回更新された地図情報を、運動推定手段によって推定された現在の判定対象物の運動に基づいて、現在の判定対象物から見た地図情報に繰り返し更新する地図更新手段と、地図更新手段によって地図情報が更新される毎に、更新された地図情報に、物体位置検出手段によって検出された現在の物体の位置に対応するブロックに、静止物の存在を記録すると共に、判定対象物から検出された現在の物体の位置までの間に対応する各ブロックにおける静止物の存在の記録を減少させる静止物記録手段とを更に含んで構成することができる。
【0017】
上記のデータ生成手段は、予め定められた個数の可動物データを生成して、ブロックに格納することができる。
【発明の効果】
【0018】
以上説明したように、本発明の危険判定装置及びプログラムによれば、各可動物データの移動を繰り返し行う毎に、可動物データの消滅及び生成を行って可動物データを更新し、消滅した可動物データの組み合わせの消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる、という効果が得られる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1の実施の形態に係る衝突危険判定装置を示すブロック図である。
【図2】(A)走行環境の例を示すイメージ図、(B)初期状態における局所地図情報を示すイメージ図、及び(C)レーザレーダによる検出結果が記録された局所地図情報を示すイメージ図である。
【図3】自車両の周辺の走行環境を検出した結果を示すイメージ図である。
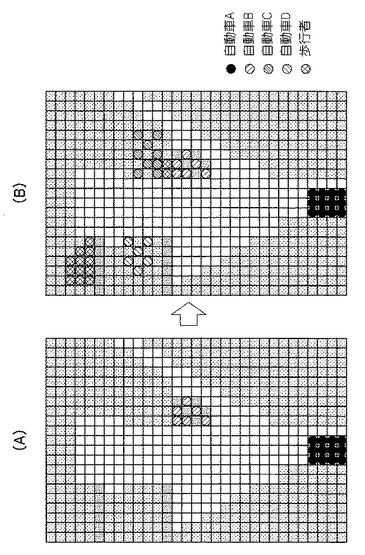
【図4】(A)可動物進入可能性マップにおいて、移動物の領域に可動物粒子を配置した様子を示すイメージ図、及び(B)可動物進入可能性マップにおいて、更に死角領域に可動物粒子を配置した様子を示すイメージ図である。
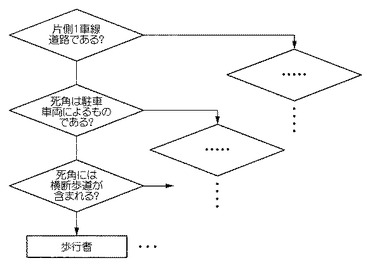
【図5】IF−THENルールの例を示す図である。
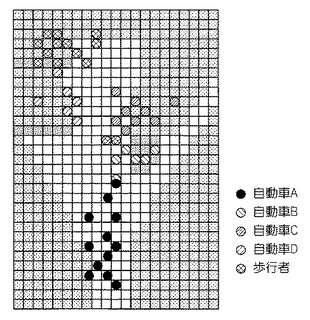
【図6】可動物進入可能性マップにおいて、可動物粒子を移動させた様子を示すイメージ図である。
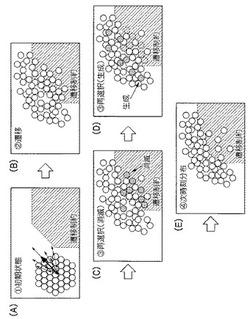
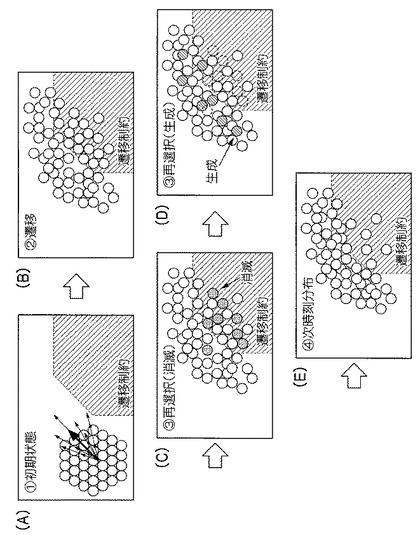
【図7】(A)可動物粒子が配置された初期状態を示すイメージ図、(B)可動物粒子を遷移させた様子を示すイメージ図、(C)可動物粒子を消滅させた様子を示すイメージ図、(D)可動物粒子を複製した様子を示すイメージ図、及び(E)次のステップにおける可動物粒子の配置を示すイメージ図である。
【図8】(A)走行環境の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図9】(A)走行環境の他の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図10】(A)走行環境の他の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図11】本発明の第1の実施の形態に係る衝突危険判定装置における局所地図生成処理ルーチンの内容を示すフローチャートである。
【図12】本発明の第1の実施の形態に係る衝突危険判定装置における危険判定処理ルーチンの内容を示すフローチャートである。
【図13】(A)第2の実施の形態に係る衝突危険判定装置において、可動物粒子を消滅させた様子を示すイメージ図、及び(B)可動物粒子を複製した様子を示すイメージ図である。
【図14】(A)第3の実施の形態に係る衝突危険判定装置において、可動物粒子を消滅させた様子を示すイメージ図、及び(B)可動物粒子を複製した様子を示すイメージ図である。
【図15】定点観測を行っている様子を示す図である。
【図16】データベースの例を示す図である。
【図17】周辺情報入力と想定出力とを格納したテーブルを示す図である。
【図18】ニューラルネットワークを示す図である。
【発明を実施するための形態】
【0020】
以下、図面を参照して本発明の実施の形態を詳細に説明する。なお、本実施の形態では、車両に搭載された衝突危険判定装置に、本発明を適用した場合を例に説明する。
【0021】
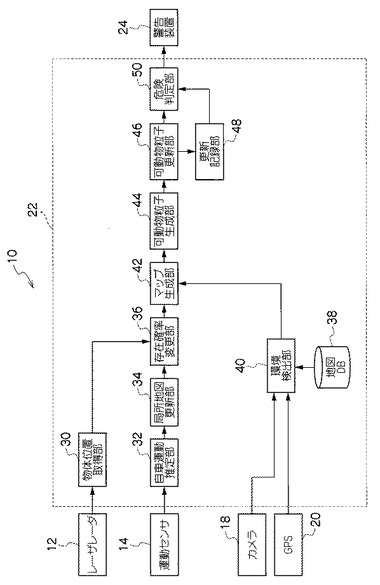
図1に示すように、第1の実施の形態に係る衝突危険判定装置10は、判定対象範囲である自車両の前方に対してレーザを1次元(水平方向)に走査しながら照射し、レーザの反射によりレーザが照射された物体の2次元位置を検出するレーザレーダ12と、自車両の運動状態を検出する運動センサ14と、自車両の前方を撮影するカメラ18と、判定対象物である自車両の位置を検出するGPS装置20と、これらの検出結果に基づいて、現在の自車両から見た前方の静止物の存在を記録した局所地図情報を生成すると共に、可動物との衝突の危険性を判定し、衝突の危険性がある場合に、警報装置24によって警報を行うコンピュータ22とを備えている。
【0022】
また、レーザレーダ12は、車両前方に設置され、装置を基準とする車両前方に存在する物体までの距離を検出する装置であり、出力するレーザを水平方向に走査することで、レーザの反射により自車両前方に存在する複数の物体表面上の複数の点の位置を検出することができる。レーザレーダ12による検出結果は、自車両前方に存在する物体表面のある点の位置を表す2次元座標の集合である。レーザレーダ12による検出処理は一定サイクルで実行され、レーザレーダ12は、各時点での自車両前方に存在する物体表面の複数の点の2次元位置を示すデータをコンピュータ22に出力する。なお、レーザレーダ12は、物体位置検出手段の一例である。
【0023】
運動センサ14は、自車両の速度を計測する車速センサ、ヨーレートを計測するジャイロセンサ、又は自車両の加速度を計測する加速度センサで構成されている。
【0024】
カメラ18は、小型のCCDカメラ又はCMOSカメラで構成され、車両の前方を撮影するように車両のフロントウィンドウ上部等に取り付けられている。カメラ18で撮影された前方の道路状況等の画像データは、コンピュータ22に入力される。
【0025】
コンピュータ22は、CPU、後述する局所地図生成処理ルーチン及び危険判定処理ルーチンの各々を実行するためのプログラムを記憶したROM、データ等を記憶するRAM、及びこれらを接続するバスを含んで構成されている。このコンピュータ22をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、レーザレーダ12により検出された物体の2次元位置を取得する物体位置取得部30と、運動センサ14により検出された車速、ヨーレート、又は加速度に基づいて、自車両の運動を推定する自車運動推定部32と、自車両の運動に基づいて、一時刻前までの局所地図情報を現在の自車両から見た座標系の局所地図情報に更新する局所地図更新部34と、検出された現在の物体の2次元位置に基づいて、更新された局所地図情報における静止物の存在確率を変更する存在確率変更部36と、を備えている。なお、存在確率変更部36は、静止物記録手段の一例である。
【0026】
自車運動推定部32は、局所地図情報が前回更新されてから現在までの間における、運動センサ14により検出された車速、ヨーレート、又は加速度に基づいて、局所地図情報が前回更新されてから現在までの自車両の運動を推定する。
【0027】
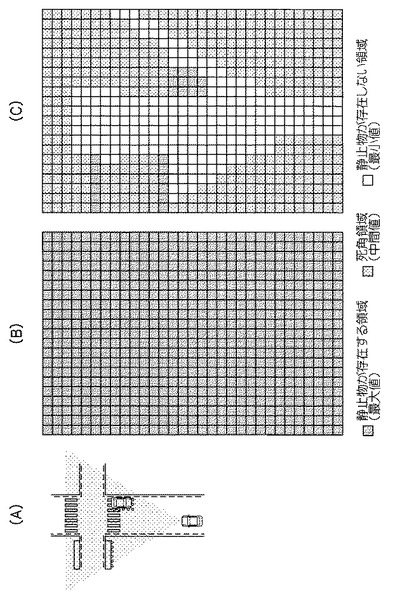
局所地図更新部34は、一時刻前までに更新された局所地図情報を、推定された自車両の運動に従って、現在の自車から見た座標系へと変換することで、現在の自車両から見た前方領域を表わす局所地図情報を生成する。また、局所地図更新部34は、局所地図情報の更新を繰り返し行う。局所地図情報は、図2(B)に示すように、自車両前方の一定領域内を、一定の大きさの格子(ブロック)によって分割した複数のブロックで表される地図である。各ブロックにはその位置に静止物が存在する確率が記録され、初期状態では、図2(B)に示すように、存在確率として初期値である0.5(中間値)が記録されている。
【0028】
存在確率変更部36は、局所地図更新部34により局所地図情報が更新される毎に、物体位置取得部30によって取得された現在の物体の2次元位置それぞれに基づいて、更新された局所地図情報において、その物体の2次元位置に対応するブロックの存在確率を増加させ、自車両からその物体の2次元位置までの直線上に存在する各ブロックの存在確率を減少させる。このように存在確率を変更することにより、一定期間以上、対応する位置で物体が検出されたブロックの存在確率は高くなり、物体が一時的にしか検出されないブロックの存在確率は低くなる。図2(A)に示すような走行環境である場合、図2(C)に示すように、例えば、静止物が確実に存在する位置のブロックには存在確率として1(最大値)が記録され、静止物が存在しない位置のブロックには存在確率として0(最小値)が記録される。また、他の物体によって隠されているなどの原因によって、その位置の情報が得られていないブロック(死角領域のブロック)には、存在確率として初期値である0.5(中間値)が記録される。
【0029】
この結果、多くの移動物が存在する走行環境においても、比較的長時間同じ位置に観測される路側物などの静止物のみを安定して検出可能である。また、現在までレーザレーダ12により観測できていない部分(不可視領域)も、存在確率が初期値(0.5)のままのブロックとして検出可能である。また、レーザレーダ12の計測点がほとんど得られない遠方領域は、初期値から変化しないので、死角領域とみなすことができる。
【0030】
また、コンピュータ22は、電子地図を記憶した地図データベース38と、カメラ18によって撮影された前方画像及びGPS装置20によって検出された自車両の位置に基づいて、自車両周辺の可動物及び走行環境の状況を検出する環境検出部40と、局所地図情報を複製し、検出された走行環境の状況を更に表わした可動物進入可能性マップを生成するマップ生成部42と、可動物進入可能性マップ上に、可動物を表わすデータとしての可動物粒子を生成する粒子生成候補領域を設定し、可動物粒子を生成して、粒子生成候補領域に配置する可動物粒子生成部44と、可動物粒子を移動させると共に、消滅及び複製して可動物粒子を更新する可動物粒子更新部46と、可動物粒子更新部46の更新により消滅した可動物粒子の情報を記録した更新記録部48と、更新記録部48によって記録された情報に基づいて、自車両と可動物との衝突の危険性がある位置を判定して、判定結果を警報装置24により出力する危険判定部50とを備えている。なお、環境検出部40は、可動物検出手段及び環境検出手段の一例である。また、可動物粒子更新部46は、データ移動手段及びデータ更新手段の一例である。
【0031】
地図データベース38に記憶されている電子地図には、道路形状や標識表示、建造物に関する情報が格納されている。
【0032】
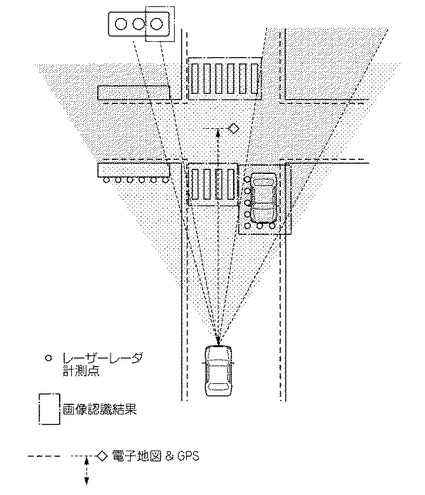
環境検出部40は、GPS装置20によって検出された自車位置に基づいて、地図データベース38の電子地図から、図3に示すように、自車両周辺の道路形状や標識表示、建造物に関する情報を検出する。また、環境検出部40は、カメラ18によって撮影された前方画像から、学習型のパターン認識技術(例えば、SVM)によって、図3に示すように、前方に存在する可動物及び可動物の種類(例えば、歩行者、二輪車、自動車等)を検出すると共に、信号機の点灯状況を検出する。
【0033】
マップ生成部42は、存在確率変更部36により得られる現在の局所地図情報を複製し、検出された走行環境の状況を表わした可動物進入可能性マップを生成する。例えば、歩行者用の進入可能性マップとして、検出された横断歩道や歩道の領域に対応するブロックに、横断歩道や歩道であることを格納する。また、検出された信号機の点灯状態を考慮して、横断歩道などを進入不可能と定義しても良い。さらに、このような可動物進入可能性マップは、自動車や二輪車に対応するものを用意しても良い。
【0034】
また、マップ生成部42は、可動物進入可能性マップから、自車位置と静止物の位置とに基づいて、図3に示すように、自車から見た静止物によって形成される死角領域を特定する。また、マップ生成部42は、連続する局所地図情報の時間差分をとることによって、移動物と静止物とを識別し、可動物進入可能性マップ上において移動物が存在する領域を特定する。また、マップ生成部42は、特定された移動物が存在する領域と、環境検出部40で検出された可動物の種類とを対応付ける。
【0035】
可動物粒子生成部44は、可動物進入可能性マップにおいて、特定された移動物が存在する領域を、粒子生成候補領域とし、可動物進入可能性マップの死角領域も粒子生成候補領域とする。また、自車両が存在する領域も、粒子生成候補領域とする。また、可動物粒子生成部44は、予め設計された粒子総数となるように、乱数発生器を用いて、各粒子生成候補領域に対して複数の可動物粒子を生成して配置する。図4(A)に示すような移動物が存在する領域から生成された粒子生成候補領域に配置された可動物粒子には、自動車、二輪車、歩行者などの可動物の種類の検出結果のラベルや、検出された移動状態としての向き、速度などの情報を併せて割り当てる。なお、粒子総数は、コンピュータ22の処理能力に応じて予め設定しておけばよい。
【0036】
また、可動物を識別するための識別情報が、可動物粒子に割り当てられる。例えば、1つの移動物について生成された粒子生成候補領域に対しては、同じ識別情報が割り当てられた可動物粒子が生成される。図4(B)に示すような死角領域から生成された粒子生成候補領域の可動物粒子には、環境検出部40の検出結果と、図5に示すような予め定められたIF−THENルールに基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルや、向き・速度などの移動状態を示す情報を併せて可動物粒子に割り当てる。例えば、道路形状が、片側1車線道路であり、死角領域が、駐車車両により形成されるものであり、かつ、死角領域に、横断歩道が含まれる場合には、歩行者のラベルが割り当てられた可動物粒子が配置される。
【0037】
可動物粒子更新部46は、各可動物粒子の移動状態を、ランダムデータ(乱数)に基づいて変更して、図6に示すように、各可動物粒子の変更後の移動状態に応じて、各可動物粒子を移動させてから、可動物粒子の再選択を行って、各可動物粒子の配置を1ステップ更新する。
【0038】
以下、各可動物粒子の配置を更新する原理について説明する。
【0039】
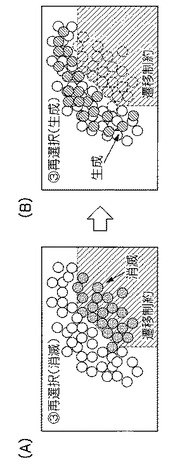
まず、初期状態として、図7(A)に示すように可動物粒子が配置されている場合に、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、図7(B)に示すように、変更された移動状態に応じて、各可動物粒子が遷移する。
【0040】
そして、図7(C)に示すように、遷移制約を受ける領域の可動物粒子を中心に、少なくとも1つの可動物粒子を消滅させる。次に、図7(D)に示すように、消滅させた分だけ、可動物粒子を複製して、消滅していない他の可動物粒子の位置に重複するように配置し、又は、消滅していない他の可動物粒子の位置の周辺の位置(乱数を乗じた位置)に配置する。これによって、遷移制約を受けない領域を中心に、可動物粒子が新たに生成される。また、全粒子数が一定になるように、上記の消滅及び複製が行われる。
【0041】
そして、図7(E)に示すように配置された可動物粒子に対して、同上記と同様に次ステップの更新処理が行われる。
【0042】
次に、可動物粒子の遷移制約の例について説明する。
【0043】
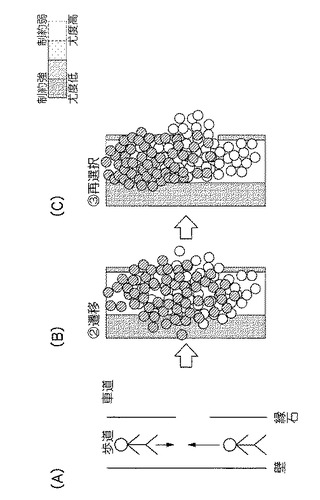
まず、他の可動物の可動物粒子と重複することを、遷移制約とする。従って、異なる識別情報が割り当てられた可動物粒子が同じブロックに配置されている場合には、これらの可動物粒子は、更新処理により消滅させられる。例えば、図8(A)に示すような、壁と縁石に挟まれた歩道の領域内に、2人の歩行者が存在する場合、図8(B)に示すように、重複して配置された2人の歩行者の可動物粒子を中心に、図8(C)に示すように更新処理で消滅させる。なお、各可動物に対して、他の可動物の可動粒子が配置されたブロックに適切な尤度を設定して、遷移制約を構成すればよい。
【0044】
このとき、他の可動物の可動物粒子と重複することを遷移制約として、可動物粒子が消滅させられた場合には、消滅した位置と、消滅させられた2つの可動物粒子の可動物の種類のペアとを示す消滅情報を更新記録部48に記録する。
【0045】
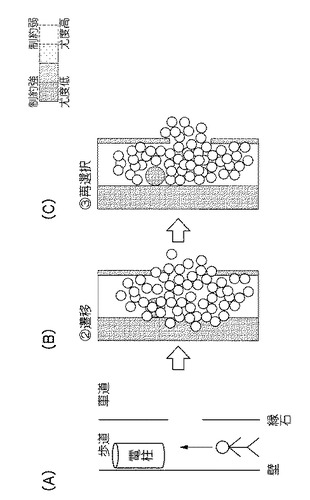
また、障害物(静止物)が存在する領域と重複することを、遷移制約とする。例えば、図9(A)に示すような、壁と縁石に挟まれた歩道の領域内に、電柱が存在する場合、図9(B)に示すような、静止物である壁、縁石、及び電柱が存在する領域に配置された可動物粒子を中心に、図9(C)に示すように更新処理で消滅させる。なお、可動物進入可能性マップのブロックに記録された存在確率に応じて、可動物粒子が消滅させられるように構成してもよく、この場合、各ブロックの存在確率を尤度として設定して、遷移制約を構成すればよい。
【0046】
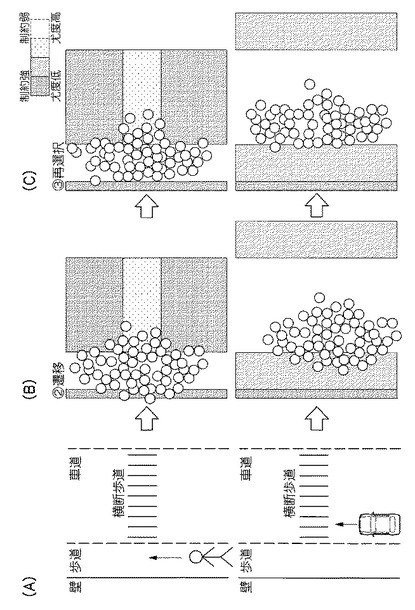
また、可動物の種類に応じて、可動物が移動する領域(進入可能領域)でないことを、遷移制約とする。例えば、図10(A)に示すように、横断歩道を有する道路の歩道に、歩行者が存在する場合、図10(B)に示すような、歩道及び横断歩道以外の位置に配置された歩行者の可動物粒子を中心に、図10(C)に示すように更新処理で消滅させる。また、図10(B)に示すような、歩道上に配置された車両の可動物粒子を中心に、図10(C)に示すように更新処理で消滅させる。この場合、可動物粒子の属性の各々に対して、各ブロックが表わす走行環境の属性に応じた適切な尤度を設定して、遷移制約を構成すればよい。
【0047】
また、上記の更新処理を繰り返している間に、環境検出部40によって新しい検出結果が得られた場合には、可動物進入可能性マップに反映するようにしてもよい。
【0048】
危険判定部50は、更新記録部48に記録されている消滅情報から、自車両の可動物粒子との重複により消滅した消滅頻度が最も多い位置を特定し、特定された位置の当該消滅頻度が、閾値を超えた時には、衝突の危険性があると判定し、警報装置24によって、特定された位置と、重複した相手の可動物粒子の可動物の種類とを、音や画像などの方法によって、ドライバに報知する。例えば、自車両の右前方で、歩行者と衝突する危険性がある場合には、音声により「右前方歩行者注意」と、ドライバに報知する。なお、重複した相手の可動物粒子の可動物に対して、警報装置24により警報するようにしてもよい。
【0049】
次に、本実施の形態に係る衝突危険判定装置10の作用について説明する。
【0050】
まず、レーザレーダ12によって、レーザが自車両の前方を水平方向に走査されて、走査方向に並んだレーザ照射位置としての物体の2次元位置の各々までの距離が計測され、自車両の前方に存在する物体の2次元位置が検出される。レーザレーダ12によって検出される2次元位置は、レーザを走査する毎に得られる。
【0051】
そして、コンピュータ22によって、図11に示す局所地図生成処理ルーチンが実行される。
【0052】
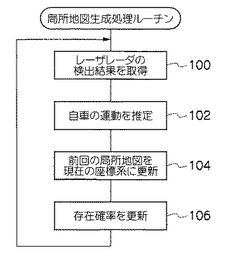
まず、ステップ100において、レーザレーダ12から、前方に存在する物体の2次元位置(走査方向に並んだ各2次元位置までの計測距離)を示すデータを取得し、ステップ102において、一時刻前から現在までの間における、運動センサ14により検出された車速、ヨーレート、又は加速度を取得し、取得した車速、ヨーレート、又は加速度に基づいて、一時刻前から現在までの自車両の運動を推定する。
【0053】
そして、ステップ104において、後述するステップ106で前回更新された局所地図情報を、上記ステップ102で推定された自車両の運動に応じて、現在の自車両から見た座標系で表わされる局所地図情報に更新する。
【0054】
次のステップ106では、上記ステップ100で取得した自車両前方に存在する物体の2次元位置に基づいて、上記ステップ104で更新された局所地図情報において、自車両前方に存在する物体の2次元位置に対応するブロックの存在確率を増加させると共に、自車両から物体の2次元位置までの直線上に存在する各ブロックの存在確率を減少させることにより現在物体が存在しない位置を地図上に記録する。そして、上記ステップ100へ戻る。
【0055】
上述したように、局所地図生成処理ルーチンが繰り返し実行されることにより、現在の自車両から見た静止物の位置が随時推定される。
【0056】
なお、生成される局所地図情報は、上記局所地図生成処理ルーチンが所定回数繰り返されたときに有効とされるようにしてもよい。
【0057】
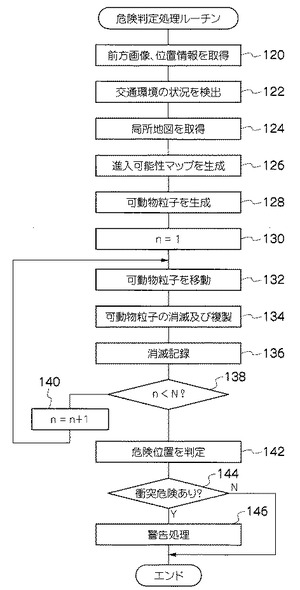
また、コンピュータ22によって、図12に示す危険判定処理ルーチンが実行される。まず、ステップ120において、カメラ18により撮影された前方画像及びGPS装置20によって検出された自車両位置を取得する。次のステップ122では、上記ステップ120で取得した前方画像、自車両位置、及び地図データベース38の電子地図に基づいて、自車両周辺の走行環境の状況を検出すると共に、周辺の可動物、可動物の移動状態、及び可動物の種類を検出する。
【0058】
そして、ステップ124において、上述した局所地図生成処理ルーチンにより得られる現在の局所地図情報を取得する。次のステップ126では、上記ステップ124で取得した局所地図情報から、上記ステップ122の検出結果を用いて、可動物進入可能性マップを生成する。
【0059】
ステップ128では、上記ステップ126で生成された可動物進入可能性マップに対して、可動物粒子生成候補領域を設定すると共に、予め設定された粒子総数となるように、各可動物の可動物粒子を生成して、対応する可動物粒子生成候補領域に配置する。次のステップ130では、更新回数をカウントする変数nを、初期値1に設定する。
【0060】
そして、ステップ132において、各可動物粒子の移動状態に、ランダムデータを加えて移動させる。ステップ134では、上記ステップ132により移動した可動物粒子の消滅及び複製を行い、可動物粒子の配置を更新する。ステップ136では、上記ステップ134で、他の可動物の可動物粒子との重複により消滅した位置と、消滅した2つの可動物粒子の可動物の種類のペアとを示す消滅情報を記録する。
【0061】
そして、ステップ138では、変数nが、更新回数を示す定数Nに到達したか否かを判定し、更新回数Nに到達していない場合には、ステップ140で、変数nをインクリメントして、上記ステップ132へ移行する。
【0062】
一方、変数nが更新回数Nに到達した場合には、ステップ142へ進み、上記ステップ136で記録された消滅情報に基づいて、自車両の可動物粒子との重複により消滅した消滅頻度が最も多い位置を特定することにより、衝突の危険性がある位置の候補を判定する。
【0063】
そして、ステップ144では、上記ステップ142で判定された位置候補における消滅頻度が閾値以上であるか否かにより、衝突の危険性があるか否かを判定し、特定された位置候補の消滅頻度が閾値未満である場合には、衝突の危険性がないと判断して、危険判定処理ルーチンを終了する。一方、特定された位置候補の消滅頻度が閾値以上である場合には、位置候補が、衝突の危険性がある位置であると判断し、ステップ146において、警告処理を行い、危険判定処理ルーチンを終了する。
【0064】
以上説明したように、第1の実施の形態に係る衝突危険判定装置によれば、可動物進入可能性マップにおいて、各可動物粒子の移動を繰り返し行う毎に、可動物粒子の消滅及び複製を行って可動物粒子の配置を更新し、消滅した可動物粒子の組み合わせの消滅位置に基づいて、自車両が可動物と衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる。
【0065】
また、交通環境の情報を手がかりとして、本来センサ情報が得られない死角領域にも可動物粒子を生成し、また、可動物粒子更新における粒子の消滅及び複製の処理結果を、危険判定を用いることで、死角領域に存在する可動物の存在を考慮した定量的な危険判定ができる。
【0066】
また、死角に存在しうる可動物の存在と、可動物の行動を含めた走行環境のリスクを定量化することで、警報装置が駆動されるので、危険性の高い死角や可動物に対して的確に警報することが可能となる。
【0067】
また、粒子の総数を可変とすることで、処理するコンピータの能力に応じて危険判定の精度を調整することができる。
【0068】
また、衝突危険性に応じて警報する結果、可動物が他の可動物や死角と適切な空間を保持するようになる場合、衝突に繋がる事象の発生頻度が減少して事故低減効果が見込まれるとともに、可動物の急可減速頻度が減少して、交通渋滞量及びエネルギ消費量削減の効果が見込まれる。
【0069】
また、市街地等の運転者からみて死角の多いような環境で安全に走行するためには、死角に歩行者等の可動物が存在しているかどうかを適切に見積もる必要がある。このような走行環境のリスク評価を、走行環境や移動体に設置されたセンサを用いて、自動的に行うことができる。
【0070】
従来技術では、死角に存在しうる可動物の取り扱いが定量化されていなかったり、強い仮定を含んでいるために精緻ではなかったり、状況が複雑になるほど計算時間がかかるという問題があったが、本実施の形態に係る衝突危険判定装置によれば、粒子総数を規定とした上で全ての可動物を粒子として取り扱うことで、これらの問題を解決することができる。
【0071】
また、粒子総数が常に一定値であるため、走行環境の状況の複雑さに依存しない計算効率を確保することができる。
【0072】
また、可動物粒子の再選択により、可動物粒子が進入しやすいほうに自然に拡散するため、可動物毎に回避行動や行動計画などの複雑な行動ロジックを組む必要なく、全ての可動物の粒子は回避行動を生成することができる。また、横断歩道など、非物理的事由による進入しやすさに対応して、可動物粒子を自動的に移動させることができる。
【0073】
また、死角領域にも可動物粒子を生成することで、死角からの飛び出しのような状況も危険判定の対象とすることができる。
【0074】
次に、第2の実施の形態に係る衝突危険判定装置について説明する。なお、第2の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0075】
第2の実施の形態では、可動物粒子の更新において、離散的な遷移制約を用いている点が、第1の実施の形態と異なっている。
【0076】
以下に、第2の実施の形態に係る可動物粒子更新部46において、各可動物粒子の配置を更新する原理について説明する。
【0077】
まず、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、変更された移動状態に応じて、図13(A)に示すように、各可動物粒子が遷移する。
【0078】
そして、図13(B)に示すように、遷移制約を受ける領域の全ての可動物粒子を消滅させると共に、消滅させた分だけ、可動物粒子を複製して、消滅していない他の可動物粒子の位置に重複するように配置し、又は、消滅していない他の可動物粒子の位置の周辺の位置(乱数を乗じた位置)に配置する。これによって、遷移制約を受けない領域に、可動物粒子が新たに生成される。
【0079】
そして、上記図13(B)に示すように配置された可動物粒子に対して、上記と同様に次ステップの更新処理が行われる。
【0080】
なお、第2の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0081】
次に、第3の実施の形態に係る衝突危険判定装置について説明する。なお、第3の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0082】
第3の実施の形態では、可動物粒子の配置を更新する原理が、第1の実施の形態及び第2の実施の形態と異なっている。
【0083】
以下、第3の実施の形態に係る可動物粒子更新部46において、各可動物粒子の配置を更新する原理について説明する。
【0084】
まず、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、変更された移動状態に応じて、上記図13(A)に示すように各可動物粒子が遷移する。
【0085】
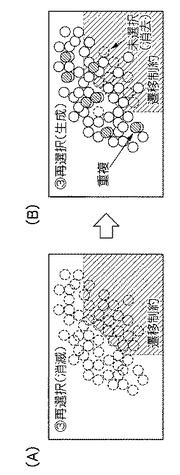
そして、遷移制約の小ささを意味する値(尤度)を各可動物粒子に割り当てた後に、図14(A)に示すように、一旦全ての可動物粒子を消滅させて、図14(B)に示すように、各可動物粒子を、(尤度)/(全粒子の尤度の総和)の確率で、重複を許して再選択して生成する。このとき、再選択された可動物粒子は、実質的に消滅しなかったことになり、また、重複して再選択された可動物粒子(2回以上選ばれた粒子)は、実質的に複製されたことになる。
【0086】
例えば、遷移制約を受ける領域の可動物粒子(21個)に、尤度=5を割り当て、遷移制約を受けない領域の可動物粒子(34個)に、尤度=20を割り当てた場合には、遷移制約を受ける領域の可動物粒子の再選択確率は、5/(21x5+34x10)≒0.013となる。一方、遷移制約を受けない領域の可動物粒子の再選択確率は、10/(21x5+34x10)≒0.052となる。
【0087】
また、例えば、歩行者の可動物粒子の場合、歩道の領域に配置された可動物粒子に、尤度=100を割り当て、横断歩道の領域に配置された可動物粒子に、尤度=80を割り当て、車道の領域に配置された可動物粒子に、尤度=30を割り当てるようにしてもよい。
【0088】
また、自動車の可動物粒子の場合、歩道の領域に配置された可動物粒子に、尤度=10を割り当て、横断歩道の領域に配置された可動物粒子に、尤度=90を割り当て、車道の領域に配置された可動物粒子に、尤度=100を割り当てるようにしてもよい。
【0089】
なお、第3の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0090】
次に、第4の実施の形態に係る衝突危険判定装置について説明する。なお、第4の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0091】
第4の実施の形態では、死角領域の位置に基づいて、死角領域内に配置される可動物粒子の可動物の種類を推定している点が、第1の実施の形態と異なっている。
【0092】
第4の実施の形態に係る衝突危険判定装置の可動物粒子生成部44では、死角領域から生成された粒子生成候補領域の可動物粒子に対して、以下に示すように、死角領域の位置に基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルを割り当てる。
【0093】
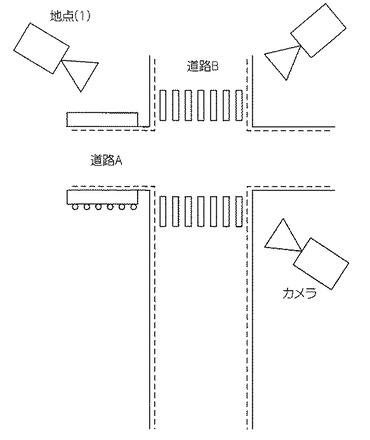
例えば、予め定点観測により、その場所での可動物の出現頻度を記録して蓄積しておく。事故の多い交差点などで、図15に示すように、カメラ撮影等による方法で,季節・時間帯等で層別して、車道・歩道を道なりに通過あるいは横断する可動物の種類を記録して、図16に示すように、移動方向、可動物の種類、及び頻度が格納されたデータベースを、各位置について生成しておく。
【0094】
可動物粒子生成部44は、死角領域の位置について生成されたデータベースに基づいて、出現頻度の高い可動物の種類を特定し、死角領域から生成された粒子生成候補領域の可動物粒子に対して、特定された可動物の種類を示すラベルを割り当てる。
【0095】
なお、第4の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0096】
次に、第5の実施の形態に係る衝突危険判定装置について説明する。なお、第5の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0097】
第5の実施の形態では、学習モデルに基づいて、死角領域の周辺情報から、死角領域内に配置される可動物粒子の可動物の種類を推定している点が、第1の実施の形態と異なっている。
【0098】
第5の実施の形態に係る衝突危険判定装置の可動物粒子生成部44では、死角領域から生成された粒子生成候補領域の可動物粒子に対して、以下に示すように、学習モデルに基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルを割り当てる。
【0099】
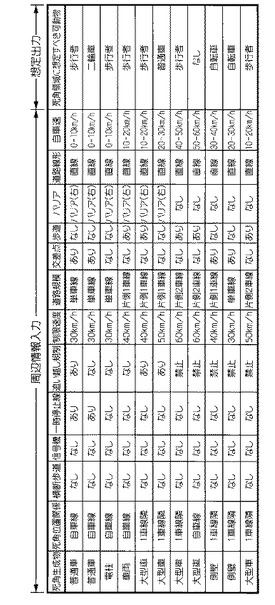
まず、学習モデルに、死角領域の周辺情報と、想定すべき可動物の種類の写像関係を学習させる。例えば、専門家(例えば運転指導員)に対して、交通場面の写真・映像などを提示したり、同乗による聞き取り調査を行ったりして、死角領域に何を想定すべきかを回答してもらい、事後的にセンサ情報を集計して、死角領域の周辺情報を求める。そして、図17に示すような、周辺情報入力の各種項目(死角生成物、自車と死角領域との位置関係、横断歩道の有無、信号機の有無、一時停止線の有無、追い越し規制の有無、制限速度、道路規模、交差点の有無、歩道の有無、バリアの有無、道路線形、自車速など)と想定出力の項目(死角領域に想定すべき可動物の種類)とからなるテーブルを作成する。
【0100】
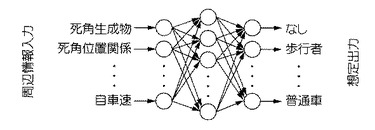
そして、図18に示すように、ニューラルネットワークを使用して、死角領域の周辺情報の各種項目と、死角領域に想定すべき可動物の種類との写像関係を予め学習させておく。なお、構造を固定した線形回帰モデルや、決定木、ベイジアンネットワーク等を使用して学習するようにしてもよい。
【0101】
可動物粒子生成部44は、環境検出部40による検出結果から得られる死角領域の周辺情報を入力として、ニューラルネットワークから出力される、死角領域に想定すべき可動物の種類を取得し、死角領域から生成された粒子生成候補領域の可動物粒子に対して、当該可動物の種類を示すラベルを割り当てる。
【0102】
なお、第5の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0103】
上記の第1の実施の形態〜第5の実施の形態では、更新処理において、割り当てた移動状態と、ランダムデータとに基づいて、可動物粒子を移動させる場合を例に説明したが、可動物粒子に、確定又は確率的な記述によって、可動物の種類に応じた移動に関連する要素を、更に割り当てて、これを更に考慮して可動物粒子を移動させるようにしてもよい。
【0104】
また、運動センサの検出結果を用いて、自車両の運動を推定する場合を例に説明したが、これに限定されるものではなく、レーザレーダの検出結果の時間差分によって、自車両の運動を推定してもよい。また、例えば、GPS装置による自車位置の検出結果を用いて自車両の運動を推定するようにしてもよい。また、レーザレーダ、運動センサ、及びGPS装置の検出結果を組み合わせて、自車両の運動を推定するようにしてもよい。
【0105】
また、レーザレーダによりレーザを前方に走査して物体の位置を検出する場合を例に説明したが、これに限定されるものではなく、ミリ波などの電磁波を前方に走査して物体の位置を検出するようにしてもよい。
【0106】
また、レーザレーダによって自車両前方の物体の位置を検出する場合を例に説明したが、これに限定されるものではなく、例えば、ステレオカメラによって撮影された前方画像から、自車両前方の物体の位置を検出するようにしてもよい。
【0107】
また、カメラを用いたステレオ技術によって、自車両から見た死角領域を特定するようにしてもよい。
【0108】
また、衝突危険判定装置を車両に搭載した場合を例に説明したが、これに限定されるものではなく、他の場所にある計算機に、本発明を適用して衝突危険判定装置を構成してもよい。例えば、道路に設置された計算機によって、可動物進入可能性マップを生成し、衝突危険の判定を行うようにしてもよい。また、車載側にマップ生成手段を設けると共に、道路側にも複数のマップ生成手段を設け、生成されたマップを無線通信により他の場所にある計算機に送信して統合し、当該計算機において、衝突の危険を判定するようにしてもよい。
【0109】
本発明のプログラムを、記憶媒体に格納して提供することも可能である。
【符号の説明】
【0110】
10 衝突危険判定装置
12 レーザレーダ
14 運動センサ
18 カメラ
20 GPS装置
22 コンピュータ
24 警報装置
30 物体位置取得部
32 自車運動推定部
34 局所地図更新部
36 存在確率変更部
38 地図データベース
40 環境検出部
42 マップ生成部
44 可動物粒子生成部
46 可動物粒子更新部
48 更新記録部
50 危険判定部
【技術分野】
【0001】
本発明は、危険判定装置及びプログラムに係り、特に、可動物同士の衝突の危険性を判定する危険判定装置及びプログラムに関する。
【背景技術】
【0002】
従来より、可動物間の衝突確率を考慮して、走行環境の死角や可動物に起因する危険要因を推定しながら、危険度を判定して運転支援を行なう運転支援装置が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−217692号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1に記載の技術では、衝突判定を物体間の組み合わせ数だけ行う必要があり、可動物の数が増えるほど衝突確率計算の計算時間が増大してしまう、という問題がある。
【0005】
本発明は、上記の問題点を解決するためになされたもので、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる危険判定装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記の目的を達成するために本発明に係る危険判定装置は、判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段と、前記可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段と、前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段と、前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段と、前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段と、前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段とを含んで構成されている。
【0007】
また、本発明に係るプログラムは、コンピュータを、判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段、前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段、前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段、前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段、及び前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段として機能させるためのプログラムである。
【0008】
本発明によれば、可動物検出手段によって、判定対象範囲から、可動物及び前記可動物の移動状態を検出する。データ生成手段によって、可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、判定対象範囲を分割した複数のブロックで表されると共に、ブロックに静止物の存在が記録された地図情報において、可動物検出手段によって検出された可動物の位置に対応するブロックに、生成された可動物データを格納する。
【0009】
そして、データ移動手段によって、地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、変更された移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行う。データ更新手段によって、データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、生成された可動物データを格納し、各可動物データの移動により、可動物データが、静止物が存在するブロックに格納された場合、可動物データを消滅させると共に、対応する可動物の可動物データを生成し、対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、生成された可動物データを格納する。また、データ更新手段において消滅した可動物データの組み合わせの消滅位置と、可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録手段に記録する。
【0010】
そして、判定手段によって、記録手段によって記録された消滅情報の消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定する。
【0011】
このように、各可動物データの移動を繰り返し行う毎に、可動物データの消滅及び生成を行って可動物データを更新し、消滅した可動物データの組み合わせの消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる。
【0012】
本発明に係るデータ生成手段は、可動物検出手段によって検出された可動物の可動物データを生成してブロックに格納すると共に、地図情報において、静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、特定された死角領域内に存在すると想定される可動物の可動物データを生成し、特定された死角領域内のブロックに、生成された可動物データを格納することができる。これによって、死角領域内に存在すると想定される可動物との衝突の危険性を判定することができる。
【0013】
本発明に係る可動物検出手段は、可動物及び可動物の移動状態と共に、可動物の種類を検出し、データ生成手段は、検出された移動状態及び可動物の種類を含む可動物データを生成して、ブロックに格納し、データ更新手段は、データ移動手段による各可動物データの移動が行われる毎に、更に、可動物の種類の各々について、可動物の種類が移動する領域でないブロックに格納された可動物の種類の可動物データを消滅させると共に、消滅させた分だけ、同じ可動物の可動物データを生成し、可動物の種類が移動する領域内の、同じ可動物の可動物データが格納されたブロック、又は該ブロックの周囲のブロックに、生成された可動物データを格納することができる。これによって、可動物の種類に応じて、移動する領域でないブロックに格納された可動物データを消滅させるように可動物データを更新することができる。
【0014】
また、上記の可動物の種類を考慮した発明におけるデータ生成手段は、可動物検出手段によって検出された可動物の可動物データを生成してブロックに格納すると共に、地図情報において、静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、判定対象範囲の可動物の移動環境を検出する環境検出手段によって検出された移動環境のうちの特定された死角領域の周辺の移動環境、又は特定された死角領域の位置に基づいて、特定された死角領域内に存在すると想定される可動物の種類を推定して、推定された可動物の種類を含む可動物データを生成し、特定された死角領域内のブロックに、生成された前記可動物データを格納することができる。これによって、死角領域内に存在すると想定される可動物の種類を考慮して、死角領域内に存在すると想定される可動物との衝突の危険性を判定することができる。
【0015】
上記のデータ生成手段は、可動物である判定対象物の可動物データを更に生成し、地図情報において、判定対象物の位置に対応するブロックに、判定対象物の可動物データを格納し、判定手段は、記録手段によって記録された消滅情報のうち、判定対象物の可動物データとの組み合わせで消滅したことを記録した消滅情報の消滅位置に基づいて、判定対象物が他の可動物と衝突する危険性がある位置を判定することができる。
【0016】
上記の発明に係る危険判定装置は、判定対象範囲に存在する物体の位置を検出する物体位置検出手段と、判定対象物の運動を推定する運動推定手段と、前回更新された地図情報を、運動推定手段によって推定された現在の判定対象物の運動に基づいて、現在の判定対象物から見た地図情報に繰り返し更新する地図更新手段と、地図更新手段によって地図情報が更新される毎に、更新された地図情報に、物体位置検出手段によって検出された現在の物体の位置に対応するブロックに、静止物の存在を記録すると共に、判定対象物から検出された現在の物体の位置までの間に対応する各ブロックにおける静止物の存在の記録を減少させる静止物記録手段とを更に含んで構成することができる。
【0017】
上記のデータ生成手段は、予め定められた個数の可動物データを生成して、ブロックに格納することができる。
【発明の効果】
【0018】
以上説明したように、本発明の危険判定装置及びプログラムによれば、各可動物データの移動を繰り返し行う毎に、可動物データの消滅及び生成を行って可動物データを更新し、消滅した可動物データの組み合わせの消滅位置に基づいて、可動物同士が衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる、という効果が得られる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1の実施の形態に係る衝突危険判定装置を示すブロック図である。
【図2】(A)走行環境の例を示すイメージ図、(B)初期状態における局所地図情報を示すイメージ図、及び(C)レーザレーダによる検出結果が記録された局所地図情報を示すイメージ図である。
【図3】自車両の周辺の走行環境を検出した結果を示すイメージ図である。
【図4】(A)可動物進入可能性マップにおいて、移動物の領域に可動物粒子を配置した様子を示すイメージ図、及び(B)可動物進入可能性マップにおいて、更に死角領域に可動物粒子を配置した様子を示すイメージ図である。
【図5】IF−THENルールの例を示す図である。
【図6】可動物進入可能性マップにおいて、可動物粒子を移動させた様子を示すイメージ図である。
【図7】(A)可動物粒子が配置された初期状態を示すイメージ図、(B)可動物粒子を遷移させた様子を示すイメージ図、(C)可動物粒子を消滅させた様子を示すイメージ図、(D)可動物粒子を複製した様子を示すイメージ図、及び(E)次のステップにおける可動物粒子の配置を示すイメージ図である。
【図8】(A)走行環境の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図9】(A)走行環境の他の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図10】(A)走行環境の他の例を示す図、(B)可動物粒子を遷移させた様子を示すイメージ図、及び(C)可動物粒子を消滅及び複製した様子を示すイメージ図である。
【図11】本発明の第1の実施の形態に係る衝突危険判定装置における局所地図生成処理ルーチンの内容を示すフローチャートである。
【図12】本発明の第1の実施の形態に係る衝突危険判定装置における危険判定処理ルーチンの内容を示すフローチャートである。
【図13】(A)第2の実施の形態に係る衝突危険判定装置において、可動物粒子を消滅させた様子を示すイメージ図、及び(B)可動物粒子を複製した様子を示すイメージ図である。
【図14】(A)第3の実施の形態に係る衝突危険判定装置において、可動物粒子を消滅させた様子を示すイメージ図、及び(B)可動物粒子を複製した様子を示すイメージ図である。
【図15】定点観測を行っている様子を示す図である。
【図16】データベースの例を示す図である。
【図17】周辺情報入力と想定出力とを格納したテーブルを示す図である。
【図18】ニューラルネットワークを示す図である。
【発明を実施するための形態】
【0020】
以下、図面を参照して本発明の実施の形態を詳細に説明する。なお、本実施の形態では、車両に搭載された衝突危険判定装置に、本発明を適用した場合を例に説明する。
【0021】
図1に示すように、第1の実施の形態に係る衝突危険判定装置10は、判定対象範囲である自車両の前方に対してレーザを1次元(水平方向)に走査しながら照射し、レーザの反射によりレーザが照射された物体の2次元位置を検出するレーザレーダ12と、自車両の運動状態を検出する運動センサ14と、自車両の前方を撮影するカメラ18と、判定対象物である自車両の位置を検出するGPS装置20と、これらの検出結果に基づいて、現在の自車両から見た前方の静止物の存在を記録した局所地図情報を生成すると共に、可動物との衝突の危険性を判定し、衝突の危険性がある場合に、警報装置24によって警報を行うコンピュータ22とを備えている。
【0022】
また、レーザレーダ12は、車両前方に設置され、装置を基準とする車両前方に存在する物体までの距離を検出する装置であり、出力するレーザを水平方向に走査することで、レーザの反射により自車両前方に存在する複数の物体表面上の複数の点の位置を検出することができる。レーザレーダ12による検出結果は、自車両前方に存在する物体表面のある点の位置を表す2次元座標の集合である。レーザレーダ12による検出処理は一定サイクルで実行され、レーザレーダ12は、各時点での自車両前方に存在する物体表面の複数の点の2次元位置を示すデータをコンピュータ22に出力する。なお、レーザレーダ12は、物体位置検出手段の一例である。
【0023】
運動センサ14は、自車両の速度を計測する車速センサ、ヨーレートを計測するジャイロセンサ、又は自車両の加速度を計測する加速度センサで構成されている。
【0024】
カメラ18は、小型のCCDカメラ又はCMOSカメラで構成され、車両の前方を撮影するように車両のフロントウィンドウ上部等に取り付けられている。カメラ18で撮影された前方の道路状況等の画像データは、コンピュータ22に入力される。
【0025】
コンピュータ22は、CPU、後述する局所地図生成処理ルーチン及び危険判定処理ルーチンの各々を実行するためのプログラムを記憶したROM、データ等を記憶するRAM、及びこれらを接続するバスを含んで構成されている。このコンピュータ22をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、レーザレーダ12により検出された物体の2次元位置を取得する物体位置取得部30と、運動センサ14により検出された車速、ヨーレート、又は加速度に基づいて、自車両の運動を推定する自車運動推定部32と、自車両の運動に基づいて、一時刻前までの局所地図情報を現在の自車両から見た座標系の局所地図情報に更新する局所地図更新部34と、検出された現在の物体の2次元位置に基づいて、更新された局所地図情報における静止物の存在確率を変更する存在確率変更部36と、を備えている。なお、存在確率変更部36は、静止物記録手段の一例である。
【0026】
自車運動推定部32は、局所地図情報が前回更新されてから現在までの間における、運動センサ14により検出された車速、ヨーレート、又は加速度に基づいて、局所地図情報が前回更新されてから現在までの自車両の運動を推定する。
【0027】
局所地図更新部34は、一時刻前までに更新された局所地図情報を、推定された自車両の運動に従って、現在の自車から見た座標系へと変換することで、現在の自車両から見た前方領域を表わす局所地図情報を生成する。また、局所地図更新部34は、局所地図情報の更新を繰り返し行う。局所地図情報は、図2(B)に示すように、自車両前方の一定領域内を、一定の大きさの格子(ブロック)によって分割した複数のブロックで表される地図である。各ブロックにはその位置に静止物が存在する確率が記録され、初期状態では、図2(B)に示すように、存在確率として初期値である0.5(中間値)が記録されている。
【0028】
存在確率変更部36は、局所地図更新部34により局所地図情報が更新される毎に、物体位置取得部30によって取得された現在の物体の2次元位置それぞれに基づいて、更新された局所地図情報において、その物体の2次元位置に対応するブロックの存在確率を増加させ、自車両からその物体の2次元位置までの直線上に存在する各ブロックの存在確率を減少させる。このように存在確率を変更することにより、一定期間以上、対応する位置で物体が検出されたブロックの存在確率は高くなり、物体が一時的にしか検出されないブロックの存在確率は低くなる。図2(A)に示すような走行環境である場合、図2(C)に示すように、例えば、静止物が確実に存在する位置のブロックには存在確率として1(最大値)が記録され、静止物が存在しない位置のブロックには存在確率として0(最小値)が記録される。また、他の物体によって隠されているなどの原因によって、その位置の情報が得られていないブロック(死角領域のブロック)には、存在確率として初期値である0.5(中間値)が記録される。
【0029】
この結果、多くの移動物が存在する走行環境においても、比較的長時間同じ位置に観測される路側物などの静止物のみを安定して検出可能である。また、現在までレーザレーダ12により観測できていない部分(不可視領域)も、存在確率が初期値(0.5)のままのブロックとして検出可能である。また、レーザレーダ12の計測点がほとんど得られない遠方領域は、初期値から変化しないので、死角領域とみなすことができる。
【0030】
また、コンピュータ22は、電子地図を記憶した地図データベース38と、カメラ18によって撮影された前方画像及びGPS装置20によって検出された自車両の位置に基づいて、自車両周辺の可動物及び走行環境の状況を検出する環境検出部40と、局所地図情報を複製し、検出された走行環境の状況を更に表わした可動物進入可能性マップを生成するマップ生成部42と、可動物進入可能性マップ上に、可動物を表わすデータとしての可動物粒子を生成する粒子生成候補領域を設定し、可動物粒子を生成して、粒子生成候補領域に配置する可動物粒子生成部44と、可動物粒子を移動させると共に、消滅及び複製して可動物粒子を更新する可動物粒子更新部46と、可動物粒子更新部46の更新により消滅した可動物粒子の情報を記録した更新記録部48と、更新記録部48によって記録された情報に基づいて、自車両と可動物との衝突の危険性がある位置を判定して、判定結果を警報装置24により出力する危険判定部50とを備えている。なお、環境検出部40は、可動物検出手段及び環境検出手段の一例である。また、可動物粒子更新部46は、データ移動手段及びデータ更新手段の一例である。
【0031】
地図データベース38に記憶されている電子地図には、道路形状や標識表示、建造物に関する情報が格納されている。
【0032】
環境検出部40は、GPS装置20によって検出された自車位置に基づいて、地図データベース38の電子地図から、図3に示すように、自車両周辺の道路形状や標識表示、建造物に関する情報を検出する。また、環境検出部40は、カメラ18によって撮影された前方画像から、学習型のパターン認識技術(例えば、SVM)によって、図3に示すように、前方に存在する可動物及び可動物の種類(例えば、歩行者、二輪車、自動車等)を検出すると共に、信号機の点灯状況を検出する。
【0033】
マップ生成部42は、存在確率変更部36により得られる現在の局所地図情報を複製し、検出された走行環境の状況を表わした可動物進入可能性マップを生成する。例えば、歩行者用の進入可能性マップとして、検出された横断歩道や歩道の領域に対応するブロックに、横断歩道や歩道であることを格納する。また、検出された信号機の点灯状態を考慮して、横断歩道などを進入不可能と定義しても良い。さらに、このような可動物進入可能性マップは、自動車や二輪車に対応するものを用意しても良い。
【0034】
また、マップ生成部42は、可動物進入可能性マップから、自車位置と静止物の位置とに基づいて、図3に示すように、自車から見た静止物によって形成される死角領域を特定する。また、マップ生成部42は、連続する局所地図情報の時間差分をとることによって、移動物と静止物とを識別し、可動物進入可能性マップ上において移動物が存在する領域を特定する。また、マップ生成部42は、特定された移動物が存在する領域と、環境検出部40で検出された可動物の種類とを対応付ける。
【0035】
可動物粒子生成部44は、可動物進入可能性マップにおいて、特定された移動物が存在する領域を、粒子生成候補領域とし、可動物進入可能性マップの死角領域も粒子生成候補領域とする。また、自車両が存在する領域も、粒子生成候補領域とする。また、可動物粒子生成部44は、予め設計された粒子総数となるように、乱数発生器を用いて、各粒子生成候補領域に対して複数の可動物粒子を生成して配置する。図4(A)に示すような移動物が存在する領域から生成された粒子生成候補領域に配置された可動物粒子には、自動車、二輪車、歩行者などの可動物の種類の検出結果のラベルや、検出された移動状態としての向き、速度などの情報を併せて割り当てる。なお、粒子総数は、コンピュータ22の処理能力に応じて予め設定しておけばよい。
【0036】
また、可動物を識別するための識別情報が、可動物粒子に割り当てられる。例えば、1つの移動物について生成された粒子生成候補領域に対しては、同じ識別情報が割り当てられた可動物粒子が生成される。図4(B)に示すような死角領域から生成された粒子生成候補領域の可動物粒子には、環境検出部40の検出結果と、図5に示すような予め定められたIF−THENルールに基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルや、向き・速度などの移動状態を示す情報を併せて可動物粒子に割り当てる。例えば、道路形状が、片側1車線道路であり、死角領域が、駐車車両により形成されるものであり、かつ、死角領域に、横断歩道が含まれる場合には、歩行者のラベルが割り当てられた可動物粒子が配置される。
【0037】
可動物粒子更新部46は、各可動物粒子の移動状態を、ランダムデータ(乱数)に基づいて変更して、図6に示すように、各可動物粒子の変更後の移動状態に応じて、各可動物粒子を移動させてから、可動物粒子の再選択を行って、各可動物粒子の配置を1ステップ更新する。
【0038】
以下、各可動物粒子の配置を更新する原理について説明する。
【0039】
まず、初期状態として、図7(A)に示すように可動物粒子が配置されている場合に、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、図7(B)に示すように、変更された移動状態に応じて、各可動物粒子が遷移する。
【0040】
そして、図7(C)に示すように、遷移制約を受ける領域の可動物粒子を中心に、少なくとも1つの可動物粒子を消滅させる。次に、図7(D)に示すように、消滅させた分だけ、可動物粒子を複製して、消滅していない他の可動物粒子の位置に重複するように配置し、又は、消滅していない他の可動物粒子の位置の周辺の位置(乱数を乗じた位置)に配置する。これによって、遷移制約を受けない領域を中心に、可動物粒子が新たに生成される。また、全粒子数が一定になるように、上記の消滅及び複製が行われる。
【0041】
そして、図7(E)に示すように配置された可動物粒子に対して、同上記と同様に次ステップの更新処理が行われる。
【0042】
次に、可動物粒子の遷移制約の例について説明する。
【0043】
まず、他の可動物の可動物粒子と重複することを、遷移制約とする。従って、異なる識別情報が割り当てられた可動物粒子が同じブロックに配置されている場合には、これらの可動物粒子は、更新処理により消滅させられる。例えば、図8(A)に示すような、壁と縁石に挟まれた歩道の領域内に、2人の歩行者が存在する場合、図8(B)に示すように、重複して配置された2人の歩行者の可動物粒子を中心に、図8(C)に示すように更新処理で消滅させる。なお、各可動物に対して、他の可動物の可動粒子が配置されたブロックに適切な尤度を設定して、遷移制約を構成すればよい。
【0044】
このとき、他の可動物の可動物粒子と重複することを遷移制約として、可動物粒子が消滅させられた場合には、消滅した位置と、消滅させられた2つの可動物粒子の可動物の種類のペアとを示す消滅情報を更新記録部48に記録する。
【0045】
また、障害物(静止物)が存在する領域と重複することを、遷移制約とする。例えば、図9(A)に示すような、壁と縁石に挟まれた歩道の領域内に、電柱が存在する場合、図9(B)に示すような、静止物である壁、縁石、及び電柱が存在する領域に配置された可動物粒子を中心に、図9(C)に示すように更新処理で消滅させる。なお、可動物進入可能性マップのブロックに記録された存在確率に応じて、可動物粒子が消滅させられるように構成してもよく、この場合、各ブロックの存在確率を尤度として設定して、遷移制約を構成すればよい。
【0046】
また、可動物の種類に応じて、可動物が移動する領域(進入可能領域)でないことを、遷移制約とする。例えば、図10(A)に示すように、横断歩道を有する道路の歩道に、歩行者が存在する場合、図10(B)に示すような、歩道及び横断歩道以外の位置に配置された歩行者の可動物粒子を中心に、図10(C)に示すように更新処理で消滅させる。また、図10(B)に示すような、歩道上に配置された車両の可動物粒子を中心に、図10(C)に示すように更新処理で消滅させる。この場合、可動物粒子の属性の各々に対して、各ブロックが表わす走行環境の属性に応じた適切な尤度を設定して、遷移制約を構成すればよい。
【0047】
また、上記の更新処理を繰り返している間に、環境検出部40によって新しい検出結果が得られた場合には、可動物進入可能性マップに反映するようにしてもよい。
【0048】
危険判定部50は、更新記録部48に記録されている消滅情報から、自車両の可動物粒子との重複により消滅した消滅頻度が最も多い位置を特定し、特定された位置の当該消滅頻度が、閾値を超えた時には、衝突の危険性があると判定し、警報装置24によって、特定された位置と、重複した相手の可動物粒子の可動物の種類とを、音や画像などの方法によって、ドライバに報知する。例えば、自車両の右前方で、歩行者と衝突する危険性がある場合には、音声により「右前方歩行者注意」と、ドライバに報知する。なお、重複した相手の可動物粒子の可動物に対して、警報装置24により警報するようにしてもよい。
【0049】
次に、本実施の形態に係る衝突危険判定装置10の作用について説明する。
【0050】
まず、レーザレーダ12によって、レーザが自車両の前方を水平方向に走査されて、走査方向に並んだレーザ照射位置としての物体の2次元位置の各々までの距離が計測され、自車両の前方に存在する物体の2次元位置が検出される。レーザレーダ12によって検出される2次元位置は、レーザを走査する毎に得られる。
【0051】
そして、コンピュータ22によって、図11に示す局所地図生成処理ルーチンが実行される。
【0052】
まず、ステップ100において、レーザレーダ12から、前方に存在する物体の2次元位置(走査方向に並んだ各2次元位置までの計測距離)を示すデータを取得し、ステップ102において、一時刻前から現在までの間における、運動センサ14により検出された車速、ヨーレート、又は加速度を取得し、取得した車速、ヨーレート、又は加速度に基づいて、一時刻前から現在までの自車両の運動を推定する。
【0053】
そして、ステップ104において、後述するステップ106で前回更新された局所地図情報を、上記ステップ102で推定された自車両の運動に応じて、現在の自車両から見た座標系で表わされる局所地図情報に更新する。
【0054】
次のステップ106では、上記ステップ100で取得した自車両前方に存在する物体の2次元位置に基づいて、上記ステップ104で更新された局所地図情報において、自車両前方に存在する物体の2次元位置に対応するブロックの存在確率を増加させると共に、自車両から物体の2次元位置までの直線上に存在する各ブロックの存在確率を減少させることにより現在物体が存在しない位置を地図上に記録する。そして、上記ステップ100へ戻る。
【0055】
上述したように、局所地図生成処理ルーチンが繰り返し実行されることにより、現在の自車両から見た静止物の位置が随時推定される。
【0056】
なお、生成される局所地図情報は、上記局所地図生成処理ルーチンが所定回数繰り返されたときに有効とされるようにしてもよい。
【0057】
また、コンピュータ22によって、図12に示す危険判定処理ルーチンが実行される。まず、ステップ120において、カメラ18により撮影された前方画像及びGPS装置20によって検出された自車両位置を取得する。次のステップ122では、上記ステップ120で取得した前方画像、自車両位置、及び地図データベース38の電子地図に基づいて、自車両周辺の走行環境の状況を検出すると共に、周辺の可動物、可動物の移動状態、及び可動物の種類を検出する。
【0058】
そして、ステップ124において、上述した局所地図生成処理ルーチンにより得られる現在の局所地図情報を取得する。次のステップ126では、上記ステップ124で取得した局所地図情報から、上記ステップ122の検出結果を用いて、可動物進入可能性マップを生成する。
【0059】
ステップ128では、上記ステップ126で生成された可動物進入可能性マップに対して、可動物粒子生成候補領域を設定すると共に、予め設定された粒子総数となるように、各可動物の可動物粒子を生成して、対応する可動物粒子生成候補領域に配置する。次のステップ130では、更新回数をカウントする変数nを、初期値1に設定する。
【0060】
そして、ステップ132において、各可動物粒子の移動状態に、ランダムデータを加えて移動させる。ステップ134では、上記ステップ132により移動した可動物粒子の消滅及び複製を行い、可動物粒子の配置を更新する。ステップ136では、上記ステップ134で、他の可動物の可動物粒子との重複により消滅した位置と、消滅した2つの可動物粒子の可動物の種類のペアとを示す消滅情報を記録する。
【0061】
そして、ステップ138では、変数nが、更新回数を示す定数Nに到達したか否かを判定し、更新回数Nに到達していない場合には、ステップ140で、変数nをインクリメントして、上記ステップ132へ移行する。
【0062】
一方、変数nが更新回数Nに到達した場合には、ステップ142へ進み、上記ステップ136で記録された消滅情報に基づいて、自車両の可動物粒子との重複により消滅した消滅頻度が最も多い位置を特定することにより、衝突の危険性がある位置の候補を判定する。
【0063】
そして、ステップ144では、上記ステップ142で判定された位置候補における消滅頻度が閾値以上であるか否かにより、衝突の危険性があるか否かを判定し、特定された位置候補の消滅頻度が閾値未満である場合には、衝突の危険性がないと判断して、危険判定処理ルーチンを終了する。一方、特定された位置候補の消滅頻度が閾値以上である場合には、位置候補が、衝突の危険性がある位置であると判断し、ステップ146において、警告処理を行い、危険判定処理ルーチンを終了する。
【0064】
以上説明したように、第1の実施の形態に係る衝突危険判定装置によれば、可動物進入可能性マップにおいて、各可動物粒子の移動を繰り返し行う毎に、可動物粒子の消滅及び複製を行って可動物粒子の配置を更新し、消滅した可動物粒子の組み合わせの消滅位置に基づいて、自車両が可動物と衝突する危険性がある位置を判定することにより、可動物の数が増えても計算時間の増大を抑制して、衝突の危険性を判定することができる。
【0065】
また、交通環境の情報を手がかりとして、本来センサ情報が得られない死角領域にも可動物粒子を生成し、また、可動物粒子更新における粒子の消滅及び複製の処理結果を、危険判定を用いることで、死角領域に存在する可動物の存在を考慮した定量的な危険判定ができる。
【0066】
また、死角に存在しうる可動物の存在と、可動物の行動を含めた走行環境のリスクを定量化することで、警報装置が駆動されるので、危険性の高い死角や可動物に対して的確に警報することが可能となる。
【0067】
また、粒子の総数を可変とすることで、処理するコンピータの能力に応じて危険判定の精度を調整することができる。
【0068】
また、衝突危険性に応じて警報する結果、可動物が他の可動物や死角と適切な空間を保持するようになる場合、衝突に繋がる事象の発生頻度が減少して事故低減効果が見込まれるとともに、可動物の急可減速頻度が減少して、交通渋滞量及びエネルギ消費量削減の効果が見込まれる。
【0069】
また、市街地等の運転者からみて死角の多いような環境で安全に走行するためには、死角に歩行者等の可動物が存在しているかどうかを適切に見積もる必要がある。このような走行環境のリスク評価を、走行環境や移動体に設置されたセンサを用いて、自動的に行うことができる。
【0070】
従来技術では、死角に存在しうる可動物の取り扱いが定量化されていなかったり、強い仮定を含んでいるために精緻ではなかったり、状況が複雑になるほど計算時間がかかるという問題があったが、本実施の形態に係る衝突危険判定装置によれば、粒子総数を規定とした上で全ての可動物を粒子として取り扱うことで、これらの問題を解決することができる。
【0071】
また、粒子総数が常に一定値であるため、走行環境の状況の複雑さに依存しない計算効率を確保することができる。
【0072】
また、可動物粒子の再選択により、可動物粒子が進入しやすいほうに自然に拡散するため、可動物毎に回避行動や行動計画などの複雑な行動ロジックを組む必要なく、全ての可動物の粒子は回避行動を生成することができる。また、横断歩道など、非物理的事由による進入しやすさに対応して、可動物粒子を自動的に移動させることができる。
【0073】
また、死角領域にも可動物粒子を生成することで、死角からの飛び出しのような状況も危険判定の対象とすることができる。
【0074】
次に、第2の実施の形態に係る衝突危険判定装置について説明する。なお、第2の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0075】
第2の実施の形態では、可動物粒子の更新において、離散的な遷移制約を用いている点が、第1の実施の形態と異なっている。
【0076】
以下に、第2の実施の形態に係る可動物粒子更新部46において、各可動物粒子の配置を更新する原理について説明する。
【0077】
まず、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、変更された移動状態に応じて、図13(A)に示すように、各可動物粒子が遷移する。
【0078】
そして、図13(B)に示すように、遷移制約を受ける領域の全ての可動物粒子を消滅させると共に、消滅させた分だけ、可動物粒子を複製して、消滅していない他の可動物粒子の位置に重複するように配置し、又は、消滅していない他の可動物粒子の位置の周辺の位置(乱数を乗じた位置)に配置する。これによって、遷移制約を受けない領域に、可動物粒子が新たに生成される。
【0079】
そして、上記図13(B)に示すように配置された可動物粒子に対して、上記と同様に次ステップの更新処理が行われる。
【0080】
なお、第2の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0081】
次に、第3の実施の形態に係る衝突危険判定装置について説明する。なお、第3の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0082】
第3の実施の形態では、可動物粒子の配置を更新する原理が、第1の実施の形態及び第2の実施の形態と異なっている。
【0083】
以下、第3の実施の形態に係る可動物粒子更新部46において、各可動物粒子の配置を更新する原理について説明する。
【0084】
まず、更新処理により、各可動物粒子に割り当てられた移動状態が、ランダムデータに基づいて変更され、変更された移動状態に応じて、上記図13(A)に示すように各可動物粒子が遷移する。
【0085】
そして、遷移制約の小ささを意味する値(尤度)を各可動物粒子に割り当てた後に、図14(A)に示すように、一旦全ての可動物粒子を消滅させて、図14(B)に示すように、各可動物粒子を、(尤度)/(全粒子の尤度の総和)の確率で、重複を許して再選択して生成する。このとき、再選択された可動物粒子は、実質的に消滅しなかったことになり、また、重複して再選択された可動物粒子(2回以上選ばれた粒子)は、実質的に複製されたことになる。
【0086】
例えば、遷移制約を受ける領域の可動物粒子(21個)に、尤度=5を割り当て、遷移制約を受けない領域の可動物粒子(34個)に、尤度=20を割り当てた場合には、遷移制約を受ける領域の可動物粒子の再選択確率は、5/(21x5+34x10)≒0.013となる。一方、遷移制約を受けない領域の可動物粒子の再選択確率は、10/(21x5+34x10)≒0.052となる。
【0087】
また、例えば、歩行者の可動物粒子の場合、歩道の領域に配置された可動物粒子に、尤度=100を割り当て、横断歩道の領域に配置された可動物粒子に、尤度=80を割り当て、車道の領域に配置された可動物粒子に、尤度=30を割り当てるようにしてもよい。
【0088】
また、自動車の可動物粒子の場合、歩道の領域に配置された可動物粒子に、尤度=10を割り当て、横断歩道の領域に配置された可動物粒子に、尤度=90を割り当て、車道の領域に配置された可動物粒子に、尤度=100を割り当てるようにしてもよい。
【0089】
なお、第3の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0090】
次に、第4の実施の形態に係る衝突危険判定装置について説明する。なお、第4の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0091】
第4の実施の形態では、死角領域の位置に基づいて、死角領域内に配置される可動物粒子の可動物の種類を推定している点が、第1の実施の形態と異なっている。
【0092】
第4の実施の形態に係る衝突危険判定装置の可動物粒子生成部44では、死角領域から生成された粒子生成候補領域の可動物粒子に対して、以下に示すように、死角領域の位置に基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルを割り当てる。
【0093】
例えば、予め定点観測により、その場所での可動物の出現頻度を記録して蓄積しておく。事故の多い交差点などで、図15に示すように、カメラ撮影等による方法で,季節・時間帯等で層別して、車道・歩道を道なりに通過あるいは横断する可動物の種類を記録して、図16に示すように、移動方向、可動物の種類、及び頻度が格納されたデータベースを、各位置について生成しておく。
【0094】
可動物粒子生成部44は、死角領域の位置について生成されたデータベースに基づいて、出現頻度の高い可動物の種類を特定し、死角領域から生成された粒子生成候補領域の可動物粒子に対して、特定された可動物の種類を示すラベルを割り当てる。
【0095】
なお、第4の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0096】
次に、第5の実施の形態に係る衝突危険判定装置について説明する。なお、第5の実施の形態に係る衝突危険判定装置の構成は、第1の実施の形態と同様の構成となるため、同一符号を付して説明を省略する。
【0097】
第5の実施の形態では、学習モデルに基づいて、死角領域の周辺情報から、死角領域内に配置される可動物粒子の可動物の種類を推定している点が、第1の実施の形態と異なっている。
【0098】
第5の実施の形態に係る衝突危険判定装置の可動物粒子生成部44では、死角領域から生成された粒子生成候補領域の可動物粒子に対して、以下に示すように、学習モデルに基づいて、自動車、二輪車、歩行者などの可動物の種類を示すラベルを割り当てる。
【0099】
まず、学習モデルに、死角領域の周辺情報と、想定すべき可動物の種類の写像関係を学習させる。例えば、専門家(例えば運転指導員)に対して、交通場面の写真・映像などを提示したり、同乗による聞き取り調査を行ったりして、死角領域に何を想定すべきかを回答してもらい、事後的にセンサ情報を集計して、死角領域の周辺情報を求める。そして、図17に示すような、周辺情報入力の各種項目(死角生成物、自車と死角領域との位置関係、横断歩道の有無、信号機の有無、一時停止線の有無、追い越し規制の有無、制限速度、道路規模、交差点の有無、歩道の有無、バリアの有無、道路線形、自車速など)と想定出力の項目(死角領域に想定すべき可動物の種類)とからなるテーブルを作成する。
【0100】
そして、図18に示すように、ニューラルネットワークを使用して、死角領域の周辺情報の各種項目と、死角領域に想定すべき可動物の種類との写像関係を予め学習させておく。なお、構造を固定した線形回帰モデルや、決定木、ベイジアンネットワーク等を使用して学習するようにしてもよい。
【0101】
可動物粒子生成部44は、環境検出部40による検出結果から得られる死角領域の周辺情報を入力として、ニューラルネットワークから出力される、死角領域に想定すべき可動物の種類を取得し、死角領域から生成された粒子生成候補領域の可動物粒子に対して、当該可動物の種類を示すラベルを割り当てる。
【0102】
なお、第5の実施の形態に係る衝突危険判定装置の他の構成及び作用については、第1の実施の形態と同様であるため、説明を省略する。
【0103】
上記の第1の実施の形態〜第5の実施の形態では、更新処理において、割り当てた移動状態と、ランダムデータとに基づいて、可動物粒子を移動させる場合を例に説明したが、可動物粒子に、確定又は確率的な記述によって、可動物の種類に応じた移動に関連する要素を、更に割り当てて、これを更に考慮して可動物粒子を移動させるようにしてもよい。
【0104】
また、運動センサの検出結果を用いて、自車両の運動を推定する場合を例に説明したが、これに限定されるものではなく、レーザレーダの検出結果の時間差分によって、自車両の運動を推定してもよい。また、例えば、GPS装置による自車位置の検出結果を用いて自車両の運動を推定するようにしてもよい。また、レーザレーダ、運動センサ、及びGPS装置の検出結果を組み合わせて、自車両の運動を推定するようにしてもよい。
【0105】
また、レーザレーダによりレーザを前方に走査して物体の位置を検出する場合を例に説明したが、これに限定されるものではなく、ミリ波などの電磁波を前方に走査して物体の位置を検出するようにしてもよい。
【0106】
また、レーザレーダによって自車両前方の物体の位置を検出する場合を例に説明したが、これに限定されるものではなく、例えば、ステレオカメラによって撮影された前方画像から、自車両前方の物体の位置を検出するようにしてもよい。
【0107】
また、カメラを用いたステレオ技術によって、自車両から見た死角領域を特定するようにしてもよい。
【0108】
また、衝突危険判定装置を車両に搭載した場合を例に説明したが、これに限定されるものではなく、他の場所にある計算機に、本発明を適用して衝突危険判定装置を構成してもよい。例えば、道路に設置された計算機によって、可動物進入可能性マップを生成し、衝突危険の判定を行うようにしてもよい。また、車載側にマップ生成手段を設けると共に、道路側にも複数のマップ生成手段を設け、生成されたマップを無線通信により他の場所にある計算機に送信して統合し、当該計算機において、衝突の危険を判定するようにしてもよい。
【0109】
本発明のプログラムを、記憶媒体に格納して提供することも可能である。
【符号の説明】
【0110】
10 衝突危険判定装置
12 レーザレーダ
14 運動センサ
18 カメラ
20 GPS装置
22 コンピュータ
24 警報装置
30 物体位置取得部
32 自車運動推定部
34 局所地図更新部
36 存在確率変更部
38 地図データベース
40 環境検出部
42 マップ生成部
44 可動物粒子生成部
46 可動物粒子更新部
48 更新記録部
50 危険判定部
【特許請求の範囲】
【請求項1】
判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段と、
前記可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段と、
前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段と、
前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段と、
前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段と、
前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段と、
を含む危険判定装置。
【請求項2】
前記データ生成手段は、前記可動物検出手段によって検出された可動物の可動物データを生成して前記ブロックに格納すると共に、前記地図情報において、前記静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、前記判定対象物から見たときの静止物によって形成された死角領域を特定し、前記特定された前記死角領域内に存在すると想定される可動物の前記可動物データを生成し、前記特定された死角領域内のブロックに、前記生成された前記可動物データを格納する請求項1記載の危険判定装置。
【請求項3】
前記可動物検出手段は、前記可動物及び前記可動物の移動状態と共に、前記可動物の種類を検出し、
前記データ生成手段は、前記検出された前記移動状態及び前記可動物の種類を含む前記可動物データを生成して、前記ブロックに格納し、
前記データ更新手段は、前記データ移動手段による各可動物データの移動が行われる毎に、更に、前記可動物の種類の各々について、前記可動物の種類が移動する領域でないブロックに格納された前記可動物の種類の可動物データを消滅させると共に、消滅させた分だけ、同じ可動物の可動物データを生成し、前記可動物の種類が移動する領域内の、同じ可動物の可動物データが格納されたブロック、又は該ブロックの周囲のブロックに、前記生成された可動物データを格納する請求項1記載の危険判定装置。
【請求項4】
前記データ生成手段は、前記可動物検出手段によって検出された可動物の可動物データを生成して前記ブロックに格納すると共に、前記地図情報において、前記静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、前記判定対象範囲の可動物の移動環境を検出する環境検出手段によって検出された前記移動環境のうちの前記特定された死角領域の周辺の移動環境、又は前記特定された死角領域の位置に基づいて、前記特定された前記死角領域内に存在すると想定される可動物の種類を推定して、前記推定された可動物の種類を含む前記可動物データを生成し、前記特定された死角領域内のブロックに、前記生成された前記可動物データを格納する請求項3記載の危険判定装置。
【請求項5】
前記データ生成手段は、可動物である判定対象物の可動物データを更に生成し、前記地図情報において、前記判定対象物の位置に対応するブロックに、前記判定対象物の可動物データを格納し、
前記判定手段は、前記記録手段によって記録された前記消滅情報のうち、前記判定対象物の可動物データとの組み合わせで消滅したことを記録した前記消滅情報の消滅位置に基づいて、前記判定対象物が他の可動物と衝突する危険性がある位置を判定する請求項1〜請求項4の何れか1項記載の危険判定装置。
【請求項6】
判定対象範囲に存在する物体の位置を検出する物体位置検出手段と、
判定対象物の運動を推定する運動推定手段と、
前回更新された前記地図情報を、前記運動推定手段によって推定された現在の判定対象物の運動に基づいて、現在の判定対象物から見た前記地図情報に繰り返し更新する地図更新手段と、
前記地図更新手段によって前記地図情報が更新される毎に、前記更新された地図情報に、前記物体位置検出手段によって検出された現在の物体の位置に対応するブロックに、前記静止物の存在を記録すると共に、前記判定対象物から前記検出された現在の物体の位置までの間に対応する各ブロックにおける前記静止物の存在の記録を減少させる静止物記録手段と、
を更に含む請求項1〜請求項5の何れか1項記載の危険判定装置。
【請求項7】
前記データ生成手段は、予め定められた個数の前記可動物データを生成して、前記ブロックに格納する請求項1〜請求項6の何れか1項記載の危険判定装置。
【請求項8】
コンピュータを、
判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段、
前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段、
前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段、
前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段、及び
前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段
として機能させるためのプログラム。
【請求項1】
判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段と、
前記可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段と、
前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段と、
前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段と、
前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段と、
前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段と、
を含む危険判定装置。
【請求項2】
前記データ生成手段は、前記可動物検出手段によって検出された可動物の可動物データを生成して前記ブロックに格納すると共に、前記地図情報において、前記静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、前記判定対象物から見たときの静止物によって形成された死角領域を特定し、前記特定された前記死角領域内に存在すると想定される可動物の前記可動物データを生成し、前記特定された死角領域内のブロックに、前記生成された前記可動物データを格納する請求項1記載の危険判定装置。
【請求項3】
前記可動物検出手段は、前記可動物及び前記可動物の移動状態と共に、前記可動物の種類を検出し、
前記データ生成手段は、前記検出された前記移動状態及び前記可動物の種類を含む前記可動物データを生成して、前記ブロックに格納し、
前記データ更新手段は、前記データ移動手段による各可動物データの移動が行われる毎に、更に、前記可動物の種類の各々について、前記可動物の種類が移動する領域でないブロックに格納された前記可動物の種類の可動物データを消滅させると共に、消滅させた分だけ、同じ可動物の可動物データを生成し、前記可動物の種類が移動する領域内の、同じ可動物の可動物データが格納されたブロック、又は該ブロックの周囲のブロックに、前記生成された可動物データを格納する請求項1記載の危険判定装置。
【請求項4】
前記データ生成手段は、前記可動物検出手段によって検出された可動物の可動物データを生成して前記ブロックに格納すると共に、前記地図情報において、前記静止物の存在が記録されたブロックと、判定対象物の位置とに基づいて、判定対象物から見たときの静止物によって形成された死角領域を特定し、前記判定対象範囲の可動物の移動環境を検出する環境検出手段によって検出された前記移動環境のうちの前記特定された死角領域の周辺の移動環境、又は前記特定された死角領域の位置に基づいて、前記特定された前記死角領域内に存在すると想定される可動物の種類を推定して、前記推定された可動物の種類を含む前記可動物データを生成し、前記特定された死角領域内のブロックに、前記生成された前記可動物データを格納する請求項3記載の危険判定装置。
【請求項5】
前記データ生成手段は、可動物である判定対象物の可動物データを更に生成し、前記地図情報において、前記判定対象物の位置に対応するブロックに、前記判定対象物の可動物データを格納し、
前記判定手段は、前記記録手段によって記録された前記消滅情報のうち、前記判定対象物の可動物データとの組み合わせで消滅したことを記録した前記消滅情報の消滅位置に基づいて、前記判定対象物が他の可動物と衝突する危険性がある位置を判定する請求項1〜請求項4の何れか1項記載の危険判定装置。
【請求項6】
判定対象範囲に存在する物体の位置を検出する物体位置検出手段と、
判定対象物の運動を推定する運動推定手段と、
前回更新された前記地図情報を、前記運動推定手段によって推定された現在の判定対象物の運動に基づいて、現在の判定対象物から見た前記地図情報に繰り返し更新する地図更新手段と、
前記地図更新手段によって前記地図情報が更新される毎に、前記更新された地図情報に、前記物体位置検出手段によって検出された現在の物体の位置に対応するブロックに、前記静止物の存在を記録すると共に、前記判定対象物から前記検出された現在の物体の位置までの間に対応する各ブロックにおける前記静止物の存在の記録を減少させる静止物記録手段と、
を更に含む請求項1〜請求項5の何れか1項記載の危険判定装置。
【請求項7】
前記データ生成手段は、予め定められた個数の前記可動物データを生成して、前記ブロックに格納する請求項1〜請求項6の何れか1項記載の危険判定装置。
【請求項8】
コンピュータを、
判定対象範囲から、可動物及び前記可動物の移動状態を検出する可動物検出手段によって検出された可動物の移動状態を含む可動物データを生成すると共に、前記判定対象範囲を分割した複数のブロックで表されると共に、前記ブロックに静止物の存在が記録された地図情報において、前記可動物検出手段によって検出された可動物の位置に対応するブロックに、前記生成された前記可動物データを格納するデータ生成手段、
前記地図情報のブロックに格納された可動物データの移動状態を、ランダムデータに基づいて変更すると共に、前記変更された前記移動状態に応じて、各可動物データが格納されるブロックを移動させることを繰り返し行うデータ移動手段、
前記データ移動手段による各可動物データの移動が行われる毎に、各可動物データの移動により、異なる可動物の可動物データの組み合わせが同じブロックに格納された場合、前記可動物データの組み合わせを消滅させると共に、各々対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納し、各可動物データの移動により、前記可動物データが、静止物が存在するブロックに格納された場合、前記可動物データを消滅させると共に、対応する可動物の可動物データを生成し、前記対応する可動物の他の可動物データが格納されたブロック、又は該ブロックの周辺のブロックに、前記生成された可動物データを格納するデータ更新手段、
前記データ更新手段において消滅した前記可動物データの組み合わせの消滅位置と、前記可動物データの組み合わせの可動物に関する情報とを示す消滅情報を記録する記録手段、及び
前記記録手段によって記録された消滅情報の消滅位置に基づいて、前記可動物同士が衝突する危険性がある位置を判定する判定手段
として機能させるためのプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2011−198266(P2011−198266A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−66626(P2010−66626)
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月23日(2010.3.23)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【Fターム(参考)】
[ Back to top ]