
危険箇所情報表示装置
【課題】 車両が危険地区を走行する場合に、どのような危険が存在し得るのかを運転者により具体的に報知することができる危険箇所情報表示装置を提供する。
【解決手段】 車載器CPU2は、車両の位置に基づいて、データ格納部5にデータベースとして記録されているヒヤリハットマップ中のヒヤリハットポイントを車両が通過することが想定される場合、表示装置20により当該ヒヤリハットポイントにおける危険因子に関する情報をフロントウインドウに投射し、実際の前方視界に重畳させて視覚的イメージで表示させる。
【解決手段】 車載器CPU2は、車両の位置に基づいて、データ格納部5にデータベースとして記録されているヒヤリハットマップ中のヒヤリハットポイントを車両が通過することが想定される場合、表示装置20により当該ヒヤリハットポイントにおける危険因子に関する情報をフロントウインドウに投射し、実際の前方視界に重畳させて視覚的イメージで表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行経路中に存在する危険箇所に関する情報を、表示手段に表示させる危険箇所情報表示装置に関する。
【背景技術】
【0002】
従来の車両用ナビゲーション装置は、目的地を設定すると、地図データに基づき運転者の嗜好に応じて経路誘導を行うことができるようになっている。ここで、運転者の嗜好としては、例えば有料道路の利用の可否や経由地の設定などがある。また、近年はVICS(Vehicle Information Communication System,登録商標)に代表されるように、通信ネットワークを利用して道路の渋滞情報を取得し、経路誘導に活用することも行われている。
また、例えば、特許文献1には、道路交通に関する危険情報を端末よりアップロードしてサーバに収集・蓄積し、サーバは、車両より要求があると危険情報を配信し、車両側では、危険地区に指定された箇所に向って走行しようとする場合にはその箇所を回避するように誘導したり、また、上記箇所を通過しようとする場合には警報を発するようにした技術が開示されている。
【特許文献1】特開2003−123185号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、運転者にとっては、止むを得ず危険地区を通過しなければならない場合にその旨を報知する警報が発せられたとしても、具体的にどのような危険があるのかが明確にならなければ、その場で発生し得る危険を回避するにはどのような対処が必要なのかが認識できず、配信された情報を有効に生かすことが出来ないという問題があった。
本発明は上記事情に鑑みてなされたものであり、その目的は、車両が危険地区を走行する場合に、どのような危険が存在し得るのかを運転者により具体的に報知することができる危険箇所情報表示装置を提供することにある。
【課題を解決するための手段】
【0004】
請求項1記載の危険箇所情報表示装置によれば、表示制御手段は、車両の位置に基づいて、危険箇所データベースに記録されている危険箇所を車両が通過することが想定される場合、表示手段に、当該危険箇所における危険因子に関する情報を視覚的イメージで表示させる。従って、運転者は、表示手段による表示を見れば、これから通過しようとする危険箇所に具体的にどのような危険因子が潜在しているのかを容易に把握することができ、その危険の回避を容易に行うことができる。
【0005】
請求項2記載の危険箇所情報表示装置によれば、危険箇所記録手段は、車両の走行中に、生体反応データ記録手段,操作データ測定手段及び交通情報取得手段より得られるデータ又は情報の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それを危険箇所として危険箇所データベースに記録させる。即ち、車両の運転中において運転者が所謂「ヒヤリハット」を感じるような精神状態の動揺があったり、車両の運転操作が急激に変化したような場合は、それらが生体反応データや操作データに反映されることで危険箇所の存在が判断される。また、例えば、交通事故が発生した場合に、その事故情報を交通情報として取得すればその事故発生地点を危険箇所として認識できる。従って、車両が走行している間に判断された危険箇所を順次記録することで、以降に当該箇所を走行する場合、危険の回避に利用することができる。
【0006】
請求項3記載の危険箇所情報表示装置によれば、記録された危険箇所に関する情報を通信手段を介して外部に送信すると共に、危険箇所記録手段は、通信手段を介して外部より受信した危険箇所に関する情報も危険箇所データベースに記録させる。従って、車両の外部において、各車両より収集した危険箇所情報のデータベースを形成することができる。また、各車両が、外部より取得した危険箇所情報を追加記録することで、夫々のデータベースの情報量を増やすことができる。
【0007】
請求項4記載の危険箇所情報表示装置によれば、運転技量判定手段は、操作データ測定手段により記録された車両操作データに基づいて運転者の運転技量のレベルを判定し、表示制御手段は、判定された運転技量のレベルに応じて表示手段に表示させる危険因子に関する情報の表示態様を変化させる。即ち、ある危険箇所を走行する場合における危険の度合いは、運転者夫々の運転技量レベルにより相対的に変化するのが通常である。従って、運転技量レベルに合わせて危険因子情報の表示態様を変化させれば、運転者の感覚により一致するように危険因子情報を認識させることができる。
【0008】
請求項5記載の危険箇所情報表示装置によれば、経路案内手段は、危険箇所データベースに記録された危険箇所に関する情報を参照し、危険箇所を回避するように目的地までの走行経路を計算するので、危険因子が潜在する箇所を敢えて走行することがないように迂回して、安全性が高い走行経路を提示することができる。
【0009】
請求項6記載の危険箇所情報表示装置によれば、経路案内手段は、ユーザの選択設定に応じて危険箇所を回避するか否かを決定する。即ち、「危険箇所」であるといっても、当該箇所を通過すれば確実に危険な状態に陥るということはないので、ユーザたる運転者によっては、余りに多くの箇所を迂回するために目的への到着時間が遅れることを良しとしない場合もある。そこで、危険箇所を回避するか否かの決定をユーザの選択設定に応じて行なうようにすれば、安全性と到着時間とのトレードオフバランスをユーザの好みに合わせて定めることができる。
【発明を実施するための最良の形態】
【0010】
(第1実施例)
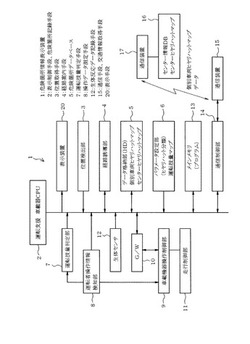
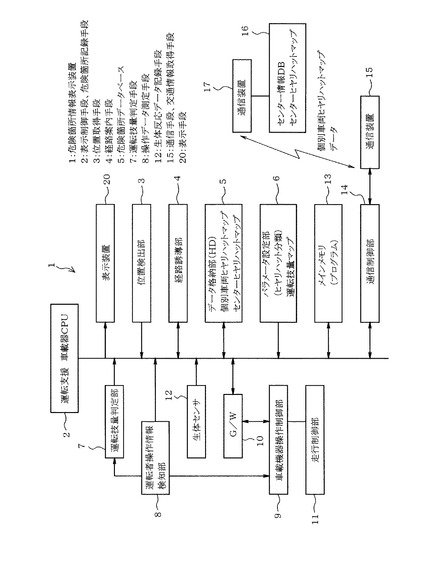
以下、本発明の第1実施例について図1乃至図7を参照して説明する。図1は、車両用ナビゲーション装置の機能も備えて構成される運転支援車載器を中心とするシステム構成を示す機能ブロック図である。運転支援車載器(危険箇所情報表示装置)1は、車載器CPU(表示制御手段, 危険箇所記録手段)2によって統括的に制御される。位置検出部(位置取得手段)3は、GPS(Global Positioning System)受信機などを含み車両の位置を計測するものであり、経路誘導部(経路案内手段)4は、運転者によって設定入力される目的地に応じた経路計算を行い、その計算結果を運転者に提供(報知)して経路案内を行う。
【0011】
データ格納部(危険箇所データベース)5は、例えばハードディスク(HD)などで構成され、後述する「ヒヤリハット」マップが記録格納されることでデータベースを構成するものである。また、データ格納部5には、ナビゲーション用の地図データも格納されている。パラメータ設定部6は、同様に後述する「ヒヤリハット」データのパラメータ設定を行なうものである。運転技量判定部(運転技量判定手段)7は、運転者操作情報検知部(操作データ測定手段)8を介して与えられるステアリング、アクセル、ブレーキ、ハンドブレーキなどの操作情報に基づいて、運転者による運転操作の技量を判定するものである。また、運転者操作情報検知部8には、車両の前方、側方、後方の画像を撮像するためのビデオカメラなども含まれている。
【0012】
車載器操作制御部9は、運転者操作情報検知部8より上記操作情報を得ると、該当する機器の動作を制御すると共に、車内LANなどのゲートウエイ(G/W)10を介して車載器CPU2と通信を行うようになっている。また、走行制御部(例えばECU(Electronic Control Unit)など)11は、走行状態に応じて車両の走行を制御する。
生体センサ(生体反応データ記録手段)12は、運転者の身体各部に接触配置されており、運転者の精神状態が反映される例えば、心拍数、血圧、発汗状態、体温などの生体反応を測定して記録する。また、生体センサ12には運転者の顔の表情や足元を監視するカメラも含まれており、そのカメラによって、運転中における運転者の視線や顔色、左右確認の状態などを撮像したり、アクセルやブレーキの操作状態を監視する。
【0013】
メインメモリ13には、車載器CPU2によって実行される制御プログラムが格納されている。通信制御部14は、車載器CPU2と、車両外部との通信を行う通信装置(通信手段,交通情報取得手段)15とのインターフェイスであり、両者間における通信データのフォーマットを変換する。通信装置15は、センター16側の通信装置17と通信を行い、車載器CPU2は、センター16側との間でヒヤリハットマップのデータをアップロード若しくはダウンロードするようになっている。
【0014】
センター16側のヒヤリハットマップは、各車両より収集したヒヤリハットマップのデータを収集し、ヒヤリハットが発生した状況に応じて、危険度、ヒヤリハットのオブジェクト、環境、その他について分類が行なわれ、IDが付されてデータベースに保存される。そして、各車両の運転者よりセンターヒヤリハットマップを使用したい(ダウンロード)という要求があった場合は、その車両の位置と目的地とに応じたマップデータが送信されるようになっている。そのマップデータには、ヒヤリハットが発生したポイント(危険箇所)、ヒヤリハットの発生頻度、ヒヤリハットの危険度合い(例えば、積雪や路面の凍結などの情報がある場合は、路面の滑り易さ、霧の発生情報がある場合は見通し難さなど)や、ヒヤリハットのオブジェクトエリア(その大きさや、表示形態(2次元,3次元))などを示すデータが含まれている。
【0015】
一方、各車両毎に記録されている個別車両ヒヤリハットマップは、運転者の急激な動作或いは操作(ハンドル、アクセル、ブレーキ等)の事象、又は急激な動作は検知されないが、運転者が精神的に動揺したと推測される事象が発生した時点と、車両走行時の運転環境(気温や風速などの天候データ)をパラメータ設定部6が分類して、ヒヤリハットポイントやその発生時刻、事象などをデータ格納部5に書き込んで記憶させる。尚、天候データは、車両に配置されるセンサより取得したり、外部より通信を介して提供されるものを利用しても良い。
また、個別車両ヒヤリハットマップは、運転者の運転特性を把握する場合にも使用される。例えば、車両が停止線で停車して左右確認を行う場合、左側の確認を怠ることでヒヤリハットした経験が複数回あった場合は、その回数が記録される。そして、以降に車両が同様の状況に遭遇した場合には、運転者に「左側を良く見て下さい」という警告メッセージを発したり、車両の周辺を監視するビデオカメラにより車両左側方の情報を優先的に提示することで、運転者の弱点をカバーすることも行なう。
【0016】
更に、ヒヤリハットポイントについては、パラメータ設定部5を介して道路状況や天候状況などのパラメータを設定できるようになっている。そして、車両が実際に走行した場合の状況と、設定されたパラメータとに基づく処理を行なうことが可能となっている。例えば、車両がこれから向う場所の気象情報から積雪の情報を取得した場合には、センター16側のデータベースから該当地域における積雪時のヒヤリハットマップデータを抽出し、ヒヤリハットポイントを特定する。
また、運転支援車載器1は表示装置(表示手段)20を備えており、この表示装置20は、例えば車両のウインドウに映像を投射して、運転者の前方視界に重畳させて表示する所謂ウインドウディスプレイ機能を備えるものである。若しくは、表示装置20自体がディスプレイを構成していても良い。尚、この技術の詳細については、例えば特願2005−175009などに記載されている。
【0017】
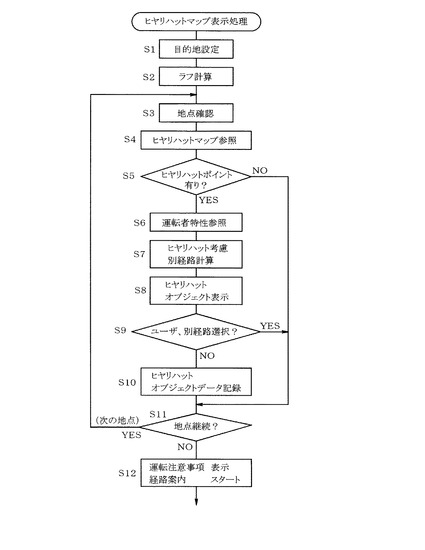
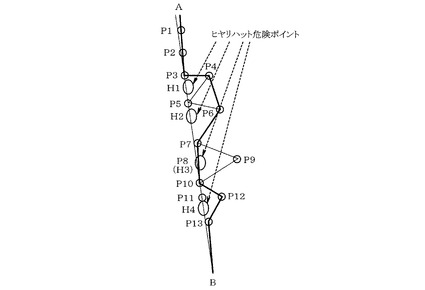
次に、本実施例の作用について図2乃至図7も参照して説明する。図2は、車両が走行を開始する前に、車載器CPU2(以下、単にCPU2と称す)及び経路誘導部4を中心として行なわれる経路計算処理、並びにヒヤリハットマップの表示処理内容を示すフローチャートである。運転者によって目的地が設定されると(ステップS1)、経路誘導部4がヒヤリハットマップを考慮することなく、通常通りの経路計算(ラフ計算)を行なう(ステップS2)。例えば、図3に示すように、現在地−目的地のA−B間を結ぶような経路が計算される。ここで、ヒヤリハットマップとは、運転者(自身及び/又は他人)が過去に運転を行った場合に何らかの危険を察知することで、「ヒヤリ」又は「ハット」したというような反応を示した地点(ヒヤリハットポイント)を記録したマップを言う。
【0018】
運転者が何らかの危険を察知した場合は、それに伴う身体的な反応が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが多い。従って、ヒヤリハットマップは、そのような反応が現れた地点を記録することで作成される。以降で使用するヒヤリハットマップには、上述したようにセンター16よりダウンロードしたもの(センターヒヤリハットマップ)と、自車両が走行中にヒヤリハット反応を検出して記録したもの(個別ヒヤリハットマップ)とがある。
【0019】
続くステップS3では、ステップS2で計算した経路に含まれる各地点を確認すると、データ格納部5に記録されているヒヤリハットマップを参照して(ステップS4)、経路中にヒヤリハットポイントがあるか否かを判断する(ステップS5)。尚、ステップS4で参照するマップは、個別車両/センターの何れか一方、若しくは双方であっても良い。ヒヤリハットポイントがなければ(「NO」)後述するステップS11に移行し、ヒヤリハットポイントがあれば(「YES」)運転者特性の記録を参照する(ステップS6)。そして、その特性に応じて前記ヒヤリハットポイントを回避した別の経路計算を行なう(ステップS7)。
また、表示装置20は、上記ヒヤリハットポイントにおける危険因子オブジェクト(ヒヤリハットオブジェクト)を後述するようにイメージ化して表示する(ステップS8)。尚、車両が走行する道路上の画像を撮像するビデオカメラがヒヤリハットポイントの画像を撮像しており、そのデータが記録されている場合はその地点の画像をそのまま表示しても良い。
【0020】
運転者は、ウインドウディスプレイに表示されたヒヤリハットオブジェクトを確認して、そのポイントを回避した別経路を選択するかどうかを設定する(ステップS9)。そして、運転者がヒヤリハットポイントの通過を選択した場合は(「NO」)、そのポイントのオブジェクトデータが経路中に記録される(ステップS10)。それから、経路中の地点が継続していれば(ステップS11,「YES」)ステップS3に戻って次の地点を確認する。一方、ステップS9で運転者が別経路を選択すれば(「YES」)そのままステップS11に移行する。
以上の処理を経路中の全ての地点について繰り返すと(ステップS11,「NO」)、CPU2は、運転注意事項を表示装置20に表示させてから経路案内をスタートさせる(ステップS12)。
【0021】
ここで、例えばVICSなどにより提供されている最新の道路状況を通信装置15を介して取得することでヒヤリハットポイントを特定し、図2における経路計算に利用することも可能である。例えば、集中豪雨などの突発的な事象や、道路工事による車線規制などヒヤリハットマップに反映されていない情報を得た場合は、パラメータ設定部5を介して緊急情報を加える設定を行い、経路計算に利用すれば良い。
【0022】
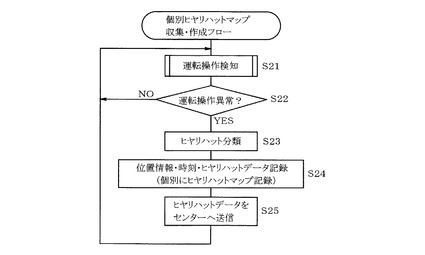
図4は、車両が走行している間にデータ収集を行い、個別車両ヒヤリハットマップを生成するためのフローチャートである。即ち、CPU2は、運転者操作情報検知部8を介して運転操作を検知、即ち車両操作データを取得すると(ステップS21)、その運転操作に異常がないか否かを判断し(ステップS22)、異常がなければ(「NO」)ステップS21に戻る。
一方、ステップS22において運転操作に異常があれば(「YES」)、パラメータ設定部6が異常が検知された運転操作の種類に応じてヒヤリハットの分類を行い(ステップS23)、その時点の車両の位置情報を位置検出部3より得て、ヒヤリハットデータを時刻と共にデータ格納部5に記録する(ステップS24)。それから、前記データを、通信制御部14及び通信装置15を介してセンター16に送信する(ステップS25)。
【0023】
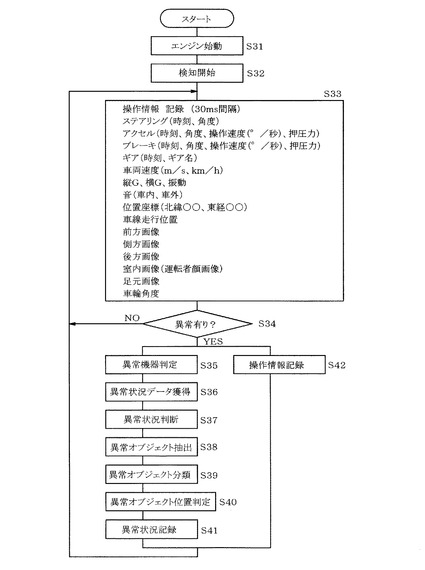
図5は、図4のステップS21における「運転操作検知」に対応する処理を示すフローチャートである。尚、図5に示す処理は、図4に示す処理と並行して行なわれており、ステップS21に対応するのは、後述するステップS33である。即ち、車両のエンジンが始動されると(ステップS31)直ちに検知が開始され(ステップS32)、以降は30ms間隔でステップS33が実行され、操作情報の記録が行なわれる。そのステップS33では、運転者操作情報検知部8を介して以下の項目についての操作情報の検知及び記録が行なわれる。例えば、「ステアリング(時刻、角度)」,「アクセル(時刻、角度、操作速度[度/s]、押圧力」,「ブレーキ(時刻、角度、操作速度[度/s]、押圧力」,「ギア(時刻、ギア名)」,「車両速度[m/S,km/h]」,「縦G,横G,振動」,「音(車内、車外)」,「位置座標(緯度、経度)」,「車線走行位置」,「車両前方、側方、後方画像」,「室内(運転者の顔)画像」,「運転者の足元画像(アクセルやブレーキの操作状態を監視する)」,「車輪角度」などである。
【0024】
続いて、ステップS33で検知した各操作情報について異常な操作があるか、若しくは、その時生体センサ12によって検出される運転者の生体反応データに異常があるかどうかが判断される(ステップS34)。前者については、車両が走行する道路環境において、想定される運転者の操作に対し、検知結果が想定される範囲より外れた場合に「異常あり」と判定する。例えば、
(1)直線若しくは比較的緩いカーブで、急激なステアリング操作が検知された場合
(2)ブレーキを踏む必要がない場所で、急ブレーキ操作が検知された場合
(3)車両速度の急上昇、又は急低下が検知された場合
などである。また、後者については、例えば、運転者の心拍数や血圧が急上昇した場合などに「異常あり」と判断する。異常がなければ(「NO」)ステップS33に戻り、異常があれば(「YES」)その異常に関する情報の記録と(ステップS35〜S41)、30ms毎に行なう通常の操作情報の記録と(ステップS42)を並列処理する。
【0025】
異常情報の記録は、先ず、異常な操作が検知された機器を判定し(ステップS35)、当該機器について異常状況データを獲得して(ステップS36)その状況を判定する(ステップS37)。ここで、「異常状況データ」とは、上記(1)のケースではステアリング角速度や横Gのデータ、(2)のケースでは、車両速度やブレーキ操作速度、加速度、振動などのデータである。
それから、異常オブジェクトの抽出、分類、位置判定を行う(ステップS38〜S40)。ここで、「異常オブジェクト」とは、運転者が異常操作を行う原因になったと推定される物体や事象をいう。上記(1)のケースでは、例えば他車両が急に横から飛び出して、運転者がその車両を避けるためにステアリングを切ったとすれば、「異常オブジェクト」は上記「他車両」となる。
【0026】
また、(2)のケースでは、前方車両が急減速したため急ブレーキをかけたとしたら、その前方車両が「異常オブジェクト」となる。その他、ケースに応じて「凍結路面」や「落下物」、「歩行者」なども「異常オブジェクト」となり得る。即ち、異常オブジェクトは、車両周辺を撮像した画像データより抽出、分類が行なわれ、また、自車両を基準とする位置が判定される。そして、最後に異常状況(オブジェクトを含む)を記録する(ステップS41)。また、図4におけるステップS23の「ヒヤリハット分類」では、ステップS41で記録された異常に関するデータが利用される。
【0027】
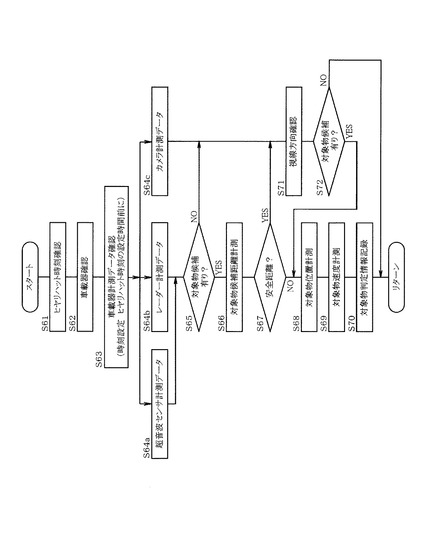
図7は、図5のステップS38〜S40における異常オブジェクトの抽出、分類、位置判定の詳細を示すフローチャートである。先ず、ステップS34で「YES」と判定した時刻を確認(参照して記録)する(ステップS61)。それから、対象物検出用のセンサとして、車両に何が搭載されているかを確認し(ステップS62)、確認されたセンサによる計測データの記録を参照する(ステップS63)。
【0028】
ここでは、例えばステップS33で提示したような運転者を監視するカメラや車両の周辺を監視するカメラや、その他、車両の周辺に向けて設置されている超音波センサ、レーダなどが搭載されているとする。これらのデータを異常、即ちヒヤリハット反応の発生時刻から遡及して参照する。超音波センサ、レーダの計測データからは(ステップS64a,S64b)ヒヤリハット反応の対象物候補が車両の付近に存在するか否かを判定し(ステップS65)、存在する場合は(「YES」)、その対象物との距離を計測する(ステップS66)。尚、距離の計測はレーダによる。
そして、計測した距離が所定の安全距離以上であるか否かを判断し(ステップS67)、安全距離が確保されていなければ(「NO」)その対象物をヒヤリハット反応の対象物と判定し、当該対象物が存在していた位置と、当該対象物の移動速度(固定物であれば速度は「0」)を計測する(ステップS68,S69)。それから、対象物の位置及び速度を対象物判定情報として記録し(ステップS70)処理を終了(リターン)する。
【0029】
また、運転者監視カメラの画像データからは(ステップS64c)運転者の視線方向がどちらを向いているかを判定して(ステップS31)、その視線方向の先にヒヤリハット反応の対象物候補が存在するか否かを判定する(ステップS32)。尚、超音波センサ、レーダによって検知できる対象物は範囲が限定されているので、それらの計測データに基づきステップS65で対象物候補なし(「NO」)と判定した場合もステップS71に移行して再度判定を行う。そして、ステップS72で「YES」と判断すればステップS68に移行し、「NO」と判断すればそのままリターンする。
【0030】
更に、例えば、道路工事が行なわれているなどのため路面の一部が滑り易い状態にあり運転者がヒヤリとしたような場合は、ABSが緊急的に作動することでヒヤリハットポイントが認識され、そのデータがマップに追加される。そして、当該データは図4に示すステップS25でセンター16にも送信され、センター16は、受信したデータを送信元の位置から設定範囲内に位置する車両に送信する。すると、当該データを受信した車両では、上記ヒヤリハットポイントを通過する際に、道路工事のため滑り易い箇所があることを路面オブジェクトとして表示したり音声で警告するなどして運転者に報知される。
【0031】
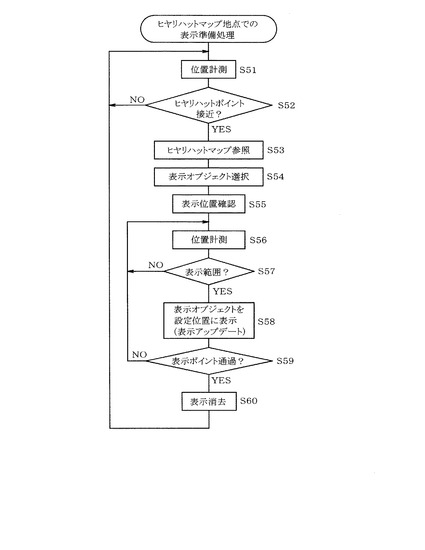
図6は、車両の走行中にヒヤリハットポイントを通過する場合、CPU2が表示装置20を介して表示制御を行う内容を示すフローチャートである。CPU2は、車両の位置計測を行なうと(ステップS51)、車両がヒヤリハットポイントに接近しているか否かを判断する(ステップS52)。ヒヤリハットポイントに接近している場合は(「YES」)、データ格納部5のヒヤリハットマップを参照し(ステップS53)、接近しているポイントの表示オブジェクトを選択して(ステップS54)そのオブジェクトを表示させる位置を確認する(ステップS55)。
【0032】
それから、再び位置計測を行ない(ステップS56)、選択した表示オブジェクトを表示させる範囲内に車両が到達したと判断すると(ステップS57,「YES」)、表示オブジェクトを設定位置に表示させる(ステップS58)。そして、その表示ポイントを通過している間は(ステップS59,「NO」)ステップS56に戻り、ステップS58でオブジェクトの表示態様を車両位置に応じてアップデートする。表示ポイントを通過した場合は(ステップS59,「YES」)オブジェクトの表示を消去して(ステップS60)ステップS51に戻る。
【0033】
ここで、図8は、表示装置20による表示オブジェクトの表示例を示す。図8(a)は、上述した路面オブジェクトに対応する表示であり、例えばセンター16より取得したヒヤリハットマップより、最近30分以内におけるすべり易い道路面の位置(低μ地点)に関する情報があり、その路面位置を表示オブジェクトとして、ウインドウディスプレイにより外の景色に重畳して表示させた場合である。車両が走行している道路前方の路面上に、「低μ地点」を面オブジェクトで表示しており、表示色:赤はよくすべる(路面のμが相対的に低い)位置であり、表示色:黄は少しすべる(路面のμが相対的に高い)位置を示している。
【0034】
また、図8(b)は、時間帯によって歩行者が多くなる通学路のようなルートにおいて、通過予想時刻がその時間帯に係る場合、当該通学路を含む交差点等に近付いた場合、そのポイントを直方体のオブジェクトとしてハイライト表示した例である。この表示により、運転者に「今の時間帯は、次の交差点では児童の通行が多いため注意」という警告を自前に行なうことが可能となる。ここで、図8(b)の場合、上記交差点にカメラが設置されており、通学路を通行している途中の児童の画像が撮像され、その画像データを車両が取得できるようなシステム構成が採用されている場合は、取得した画像データを表示させるようにしても良い。
【0035】
その他、例えば運転技量の判定結果を参照することで、ヒヤリハットポイントに関する表示を以下のような態様で行なったり、車両制御を行うこともできる。
・停止線では略必ず停止する運転者(例えば、停止率95%以上)の場合は、停止線があるヒヤリハットポイントにおいて、左右確認を行なう指示だけを表示させる。
・停止線で止まらない傾向を有する運転者(例えば、停止率80%以上,95%未満)の場合は、先ず停止を指示する表示を行い、それから左右確認の指示を表示させる。
・停止線で止まらない運転者(例えば、停止率50%未満)の場合は、先ず停止を指示する表示を行い、停止線で止まるためのブレーキングポイントでブレーキ操作を開始しなかった場合は、自動的にブレーキをかけて車両を減速させる。
・ブレーキ操作のタイミングが遅い傾向がある運転者(ブレーキングポイントが停止線に近い、車速に応じて変化する)の場合は、ブレーキ操作指示を早めに表示させる。
【0036】
また、車両側からセンター16に緊急ヒヤリハット情報を送信するようにしても良い。例えば、車両が水没したり溝に転落するといったような走行不能となる条件で情報を送信する。例えば、アクセルを踏んでも車両が走行しない場合、或いは、車両が水没した場合は、車載システムの動作が次々と停止するので、完全に動作しなくなる直前のタイミングで情報を送信する。
【0037】
そして、センター16は、その情報を受信すると、情報の送信元である車両の周辺に位置している他の車両に、緊急ヒヤリハット情報を送信して強制的に受信させる。すると、例えば水没のケースでは、そのイメージ画像や水没しようとする車両の実画像が得られた場合はその画像データを送信して、受信車両の表示装置20に表示させるようにする。緊急ヒヤリハット情報を受信した車両は、その時点の車両位置と緊急情報の発生位置の分布とその範囲の変化から自車両の安全度を判定して確認することができる。
【0038】
以上のように本実施例によれば、CPU2は、車両の位置に基づいて、データ格納部5にデータベースとして記録されているヒヤリハットマップ中のヒヤリハットポイントを車両が通過することが想定される場合、表示装置20に、当該ヒヤリハットポイントにおける危険因子に関する情報を、フロントウインドウに投射し、実際の前方視界に重畳させて視覚的イメージで表示させるようにした。従って、運転者は、その表示を見れば、これから車両で通過しようとするヒヤリハットポイントに、具体的にどのような危険因子が潜在しているのかを容易に把握することができ、その危険の回避を容易に行うことができる。
【0039】
また、CPU2は、車両の走行中に、運転者操作情報検知部8,生体センサ12データ,通信装置15より得られるデーや情報等の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それをヒヤリハットポイントとしてデータ格納部5に記録させる。従って、車両が走行している間に判断されたヒヤリハットポイントを順次記録することで、以降に当該箇所を走行する場合、危険の回避に利用することができる。
また、CPU2は、記録したヒヤリハットポイントに関する情報を通信装置15を介して外部に送信すると共に、外部より受信したヒヤリハットポイントに関する情報もデータ格納部5に記録させる。従って、車両の外部において、各車両より収集したヒヤリハットポイント情報のデータベースを形成することができる。また、各車両が、外部より取得したヒヤリハットポイント情報を追加記録することで、夫々のデータベースの情報量を増やすことができる。
【0040】
また、運転技量判定部7は、運転者操作情報検知部8により記録された車両操作データに基づいて運転者の運転技量のレベルを判定し、CPU2は、判定された運転技量のレベルに応じて表示装置20に表示させる危険因子に関する情報の表示態様を変化させる。従って、運転技量レベルに合わせて危険因子情報の表示態様を変化させれば、運転者の感覚により一致するように危険因子情報を認識させることができる。
また、経路誘導部4は、データ格納部5に記録されたヒヤリハットポイントに関する情報を参照し、ヒヤリハットポイントを回避するように目的地までの走行経路を計算するので、危険因子が潜在する箇所を敢えて走行することがないように迂回して、安全性が高い走行経路を提示することができる。加えて、経路誘導部4は、運転者の選択設定に応じてヒヤリハットポイントを回避するか否かを決定するので、安全性と到着時間とのトレードオフバランスを運転者の好みに合わせて定めることができる。
【0041】
(第2実施例)
図9は本発明の第2実施例を示すものであり、第1実施例と同一部分には同一符号を付して説明を省略し、以下異なる部分についてのみ説明する。図9は、第1実施例における図2相当図である。この処理では、ステップS2を実行すると、ラフ計算によって求められた全ての可能なルートを表示させ(ステップS81)、夫々のルートに含まれているポイントのどれを経由して走行するかを運転者に選択させる(ステップS82)。尚、この場合、それらの経路中に含まれているヒヤリハットポイントも表示する。
【0042】
運転者がポイントを適切に選択することで経路条件が「OK」となった場合は(ステップS83,「YES」)経路を確定し(ステップS85)、ルートが繋がらず経路条件が「NG」であれば(「NO」)選択が不足しているポイントを運転者に報知する(ステップS84)。経路が確定した場合は、その経路中にヒヤリハットポイントが存在するか否かを判断し(ステップS86)、存在しなければ(「NO」)そのままステップS21に移行する。また、経路中にヒヤリハットポイントが存在すれば(ステップS86,「YES」)、そのポイントにおいて表示するヒヤリハットオブジェクトのデータを記録させてから(ステップS87)ステップS21に移行する。
【0043】
即ち、図3は、現在地点Aから目的地点Bに向う経路に、運転者が地点P1,P2,P3,P4,P6,P7,P8,P10,P12,P13を選択した場合を示す。この場合、ヒヤリハットポイントはP3−P5間:H1、P5−P7間:H2、P11−P13間:H3に存在すると共に、P8自体がヒヤリハットポイントH4となっている。そして、運転者は、ヒヤリハットポイントH1,H2,H4については「回避」を選択し、ヒヤリハットポイントH3は「通過」を選択したことを示している。
【0044】
以上のように第2実施例によれば、経路誘導部4は、目的地までの経路をラフ計算すると、走行可能な経路を全て表示させて、そこに含まれている通過地点並びにヒヤリハットポイントの全てを表示させ、運転者に通過地点を選択させるようにした。従って、運転者は、目的地に到達するまでの安全性、走行時間のトータルバランスを考慮して、適切なポイント選択を行うことができる。
【0045】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形が可能である。
ヒヤリハットマップを用いて、以下のように運転者の運転診断を行うようにしても良い。例えば、実際に走行している場合に検知される危険な状況記録して既存のヒヤリハットマップと比較し、危険挙動の有無を運転者に通知する。運転者は、通知された情報を確認することで自身の運転方法を把握し、以降の運転に反映させて安全運転の励行に資するようにする。例えば、後退する場合のハンドル操作や車幅間隔(左死角)、右折の内輪差、後退時の後方確認などについて判定を行う。
また、運転者が初心者であれば、車線幅の広いルート(経路)を最適と判断してルート設定することもできるが、車線幅への影響が想定されるヒヤリハットポイント、例えば「時間帯により路上駐車が多い道路」などの情報を付加することで、ルート設定の判断に有効となる情報を提供することができる。
【0046】
通信装置15を介してセンター16と通信を行う構成は、必要に応じて設ければ良く、個別車両ヒヤリハットマップだけを生成利用するものであっても良い。
また、個別車両ヒヤリハットマップにヒヤリハットポイントを追記する構成についても、必要に応じて設ければ良く、ヒヤリハットマップは、例えばCD−ROMやDVD−ROMなどの媒体で提供されるものや、或いは、通信装置15を介してセンター16よりダウンロードしたセンターヒヤリハットマップだけを利用する構成であっても良い。
ヒヤリハットポイントを考慮した経路計算や経路選択を行うナビゲーション的な機能についても、必要に応じて設ければ良く、単にヒヤリハットポイントに接近した場合に、ヒヤリハットオブジェクトを表示させる機能だけを実行しても良い。
運転技量判定部7を設けて、判定した運転者の運転技量に応じて表示態様を変化させる構成も、必要に応じて設ければ良い。
位置取得手段は、例えばVICSのインフラを利用して車両の位置を取得するような手段であっても良い。
【図面の簡単な説明】
【0047】
【図1】本発明の第1実施例であり、運転支援車載器を中心とするシステム構成を示す機能ブロック図
【図2】車載器CPU及び経路誘導部を中心として行なわれる経路計算処理、並びにヒヤリハットマップの表示処理内容を示すフローチャート
【図3】経路計算結果の一例をイメージ的に示す図
【図4】車両が走行している間にデータ収集を行い、個別車両ヒヤリハットマップを生成するためのフローチャート
【図5】図4のステップS21における「運転操作検知」に対応する処理を示すフローチャート
【図6】車両の走行中にヒヤリハットポイントを通過する場合、CPUが表示装置を介して表示制御を行う内容を示すフローチャート
【図7】図5のステップS38〜S40における異常オブジェクトの抽出、分類、位置判定の詳細を示すフローチャート
【図8】表示オブジェクトの表示例であり、(a)は路面オブジェクトの表示例、(b)は通学路を含む交差点等に近付いた場合の表示例を示す図
【図9】本発明の第2実施例を示す図2相当図
【符号の説明】
【0048】
図面中、1は運転支援車載器(危険箇所情報表示装置)、2は車載器CPU(表示制御手段, 危険箇所記録手段)、3は位置検出部(位置取得手段)、4は経路誘導部(経路案内手段)、5はデータ格納部(危険箇所データベース)、7は運転技量判定部(運転技量判定手段)、8は運転者操作情報検知部(操作データ測定手段)、12は生体センサ(生体反応データ記録手段)、15は通信装置(通信手段,交通情報取得手段)、20は表示装置(表示手段)を示す。
【技術分野】
【0001】
本発明は、車両の走行経路中に存在する危険箇所に関する情報を、表示手段に表示させる危険箇所情報表示装置に関する。
【背景技術】
【0002】
従来の車両用ナビゲーション装置は、目的地を設定すると、地図データに基づき運転者の嗜好に応じて経路誘導を行うことができるようになっている。ここで、運転者の嗜好としては、例えば有料道路の利用の可否や経由地の設定などがある。また、近年はVICS(Vehicle Information Communication System,登録商標)に代表されるように、通信ネットワークを利用して道路の渋滞情報を取得し、経路誘導に活用することも行われている。
また、例えば、特許文献1には、道路交通に関する危険情報を端末よりアップロードしてサーバに収集・蓄積し、サーバは、車両より要求があると危険情報を配信し、車両側では、危険地区に指定された箇所に向って走行しようとする場合にはその箇所を回避するように誘導したり、また、上記箇所を通過しようとする場合には警報を発するようにした技術が開示されている。
【特許文献1】特開2003−123185号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、運転者にとっては、止むを得ず危険地区を通過しなければならない場合にその旨を報知する警報が発せられたとしても、具体的にどのような危険があるのかが明確にならなければ、その場で発生し得る危険を回避するにはどのような対処が必要なのかが認識できず、配信された情報を有効に生かすことが出来ないという問題があった。
本発明は上記事情に鑑みてなされたものであり、その目的は、車両が危険地区を走行する場合に、どのような危険が存在し得るのかを運転者により具体的に報知することができる危険箇所情報表示装置を提供することにある。
【課題を解決するための手段】
【0004】
請求項1記載の危険箇所情報表示装置によれば、表示制御手段は、車両の位置に基づいて、危険箇所データベースに記録されている危険箇所を車両が通過することが想定される場合、表示手段に、当該危険箇所における危険因子に関する情報を視覚的イメージで表示させる。従って、運転者は、表示手段による表示を見れば、これから通過しようとする危険箇所に具体的にどのような危険因子が潜在しているのかを容易に把握することができ、その危険の回避を容易に行うことができる。
【0005】
請求項2記載の危険箇所情報表示装置によれば、危険箇所記録手段は、車両の走行中に、生体反応データ記録手段,操作データ測定手段及び交通情報取得手段より得られるデータ又は情報の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それを危険箇所として危険箇所データベースに記録させる。即ち、車両の運転中において運転者が所謂「ヒヤリハット」を感じるような精神状態の動揺があったり、車両の運転操作が急激に変化したような場合は、それらが生体反応データや操作データに反映されることで危険箇所の存在が判断される。また、例えば、交通事故が発生した場合に、その事故情報を交通情報として取得すればその事故発生地点を危険箇所として認識できる。従って、車両が走行している間に判断された危険箇所を順次記録することで、以降に当該箇所を走行する場合、危険の回避に利用することができる。
【0006】
請求項3記載の危険箇所情報表示装置によれば、記録された危険箇所に関する情報を通信手段を介して外部に送信すると共に、危険箇所記録手段は、通信手段を介して外部より受信した危険箇所に関する情報も危険箇所データベースに記録させる。従って、車両の外部において、各車両より収集した危険箇所情報のデータベースを形成することができる。また、各車両が、外部より取得した危険箇所情報を追加記録することで、夫々のデータベースの情報量を増やすことができる。
【0007】
請求項4記載の危険箇所情報表示装置によれば、運転技量判定手段は、操作データ測定手段により記録された車両操作データに基づいて運転者の運転技量のレベルを判定し、表示制御手段は、判定された運転技量のレベルに応じて表示手段に表示させる危険因子に関する情報の表示態様を変化させる。即ち、ある危険箇所を走行する場合における危険の度合いは、運転者夫々の運転技量レベルにより相対的に変化するのが通常である。従って、運転技量レベルに合わせて危険因子情報の表示態様を変化させれば、運転者の感覚により一致するように危険因子情報を認識させることができる。
【0008】
請求項5記載の危険箇所情報表示装置によれば、経路案内手段は、危険箇所データベースに記録された危険箇所に関する情報を参照し、危険箇所を回避するように目的地までの走行経路を計算するので、危険因子が潜在する箇所を敢えて走行することがないように迂回して、安全性が高い走行経路を提示することができる。
【0009】
請求項6記載の危険箇所情報表示装置によれば、経路案内手段は、ユーザの選択設定に応じて危険箇所を回避するか否かを決定する。即ち、「危険箇所」であるといっても、当該箇所を通過すれば確実に危険な状態に陥るということはないので、ユーザたる運転者によっては、余りに多くの箇所を迂回するために目的への到着時間が遅れることを良しとしない場合もある。そこで、危険箇所を回避するか否かの決定をユーザの選択設定に応じて行なうようにすれば、安全性と到着時間とのトレードオフバランスをユーザの好みに合わせて定めることができる。
【発明を実施するための最良の形態】
【0010】
(第1実施例)
以下、本発明の第1実施例について図1乃至図7を参照して説明する。図1は、車両用ナビゲーション装置の機能も備えて構成される運転支援車載器を中心とするシステム構成を示す機能ブロック図である。運転支援車載器(危険箇所情報表示装置)1は、車載器CPU(表示制御手段, 危険箇所記録手段)2によって統括的に制御される。位置検出部(位置取得手段)3は、GPS(Global Positioning System)受信機などを含み車両の位置を計測するものであり、経路誘導部(経路案内手段)4は、運転者によって設定入力される目的地に応じた経路計算を行い、その計算結果を運転者に提供(報知)して経路案内を行う。
【0011】
データ格納部(危険箇所データベース)5は、例えばハードディスク(HD)などで構成され、後述する「ヒヤリハット」マップが記録格納されることでデータベースを構成するものである。また、データ格納部5には、ナビゲーション用の地図データも格納されている。パラメータ設定部6は、同様に後述する「ヒヤリハット」データのパラメータ設定を行なうものである。運転技量判定部(運転技量判定手段)7は、運転者操作情報検知部(操作データ測定手段)8を介して与えられるステアリング、アクセル、ブレーキ、ハンドブレーキなどの操作情報に基づいて、運転者による運転操作の技量を判定するものである。また、運転者操作情報検知部8には、車両の前方、側方、後方の画像を撮像するためのビデオカメラなども含まれている。
【0012】
車載器操作制御部9は、運転者操作情報検知部8より上記操作情報を得ると、該当する機器の動作を制御すると共に、車内LANなどのゲートウエイ(G/W)10を介して車載器CPU2と通信を行うようになっている。また、走行制御部(例えばECU(Electronic Control Unit)など)11は、走行状態に応じて車両の走行を制御する。
生体センサ(生体反応データ記録手段)12は、運転者の身体各部に接触配置されており、運転者の精神状態が反映される例えば、心拍数、血圧、発汗状態、体温などの生体反応を測定して記録する。また、生体センサ12には運転者の顔の表情や足元を監視するカメラも含まれており、そのカメラによって、運転中における運転者の視線や顔色、左右確認の状態などを撮像したり、アクセルやブレーキの操作状態を監視する。
【0013】
メインメモリ13には、車載器CPU2によって実行される制御プログラムが格納されている。通信制御部14は、車載器CPU2と、車両外部との通信を行う通信装置(通信手段,交通情報取得手段)15とのインターフェイスであり、両者間における通信データのフォーマットを変換する。通信装置15は、センター16側の通信装置17と通信を行い、車載器CPU2は、センター16側との間でヒヤリハットマップのデータをアップロード若しくはダウンロードするようになっている。
【0014】
センター16側のヒヤリハットマップは、各車両より収集したヒヤリハットマップのデータを収集し、ヒヤリハットが発生した状況に応じて、危険度、ヒヤリハットのオブジェクト、環境、その他について分類が行なわれ、IDが付されてデータベースに保存される。そして、各車両の運転者よりセンターヒヤリハットマップを使用したい(ダウンロード)という要求があった場合は、その車両の位置と目的地とに応じたマップデータが送信されるようになっている。そのマップデータには、ヒヤリハットが発生したポイント(危険箇所)、ヒヤリハットの発生頻度、ヒヤリハットの危険度合い(例えば、積雪や路面の凍結などの情報がある場合は、路面の滑り易さ、霧の発生情報がある場合は見通し難さなど)や、ヒヤリハットのオブジェクトエリア(その大きさや、表示形態(2次元,3次元))などを示すデータが含まれている。
【0015】
一方、各車両毎に記録されている個別車両ヒヤリハットマップは、運転者の急激な動作或いは操作(ハンドル、アクセル、ブレーキ等)の事象、又は急激な動作は検知されないが、運転者が精神的に動揺したと推測される事象が発生した時点と、車両走行時の運転環境(気温や風速などの天候データ)をパラメータ設定部6が分類して、ヒヤリハットポイントやその発生時刻、事象などをデータ格納部5に書き込んで記憶させる。尚、天候データは、車両に配置されるセンサより取得したり、外部より通信を介して提供されるものを利用しても良い。
また、個別車両ヒヤリハットマップは、運転者の運転特性を把握する場合にも使用される。例えば、車両が停止線で停車して左右確認を行う場合、左側の確認を怠ることでヒヤリハットした経験が複数回あった場合は、その回数が記録される。そして、以降に車両が同様の状況に遭遇した場合には、運転者に「左側を良く見て下さい」という警告メッセージを発したり、車両の周辺を監視するビデオカメラにより車両左側方の情報を優先的に提示することで、運転者の弱点をカバーすることも行なう。
【0016】
更に、ヒヤリハットポイントについては、パラメータ設定部5を介して道路状況や天候状況などのパラメータを設定できるようになっている。そして、車両が実際に走行した場合の状況と、設定されたパラメータとに基づく処理を行なうことが可能となっている。例えば、車両がこれから向う場所の気象情報から積雪の情報を取得した場合には、センター16側のデータベースから該当地域における積雪時のヒヤリハットマップデータを抽出し、ヒヤリハットポイントを特定する。
また、運転支援車載器1は表示装置(表示手段)20を備えており、この表示装置20は、例えば車両のウインドウに映像を投射して、運転者の前方視界に重畳させて表示する所謂ウインドウディスプレイ機能を備えるものである。若しくは、表示装置20自体がディスプレイを構成していても良い。尚、この技術の詳細については、例えば特願2005−175009などに記載されている。
【0017】
次に、本実施例の作用について図2乃至図7も参照して説明する。図2は、車両が走行を開始する前に、車載器CPU2(以下、単にCPU2と称す)及び経路誘導部4を中心として行なわれる経路計算処理、並びにヒヤリハットマップの表示処理内容を示すフローチャートである。運転者によって目的地が設定されると(ステップS1)、経路誘導部4がヒヤリハットマップを考慮することなく、通常通りの経路計算(ラフ計算)を行なう(ステップS2)。例えば、図3に示すように、現在地−目的地のA−B間を結ぶような経路が計算される。ここで、ヒヤリハットマップとは、運転者(自身及び/又は他人)が過去に運転を行った場合に何らかの危険を察知することで、「ヒヤリ」又は「ハット」したというような反応を示した地点(ヒヤリハットポイント)を記録したマップを言う。
【0018】
運転者が何らかの危険を察知した場合は、それに伴う身体的な反応が生体反応データに反映されると共に、車両操作データにも通常の運転では行われないような急激な変化が現れることが多い。従って、ヒヤリハットマップは、そのような反応が現れた地点を記録することで作成される。以降で使用するヒヤリハットマップには、上述したようにセンター16よりダウンロードしたもの(センターヒヤリハットマップ)と、自車両が走行中にヒヤリハット反応を検出して記録したもの(個別ヒヤリハットマップ)とがある。
【0019】
続くステップS3では、ステップS2で計算した経路に含まれる各地点を確認すると、データ格納部5に記録されているヒヤリハットマップを参照して(ステップS4)、経路中にヒヤリハットポイントがあるか否かを判断する(ステップS5)。尚、ステップS4で参照するマップは、個別車両/センターの何れか一方、若しくは双方であっても良い。ヒヤリハットポイントがなければ(「NO」)後述するステップS11に移行し、ヒヤリハットポイントがあれば(「YES」)運転者特性の記録を参照する(ステップS6)。そして、その特性に応じて前記ヒヤリハットポイントを回避した別の経路計算を行なう(ステップS7)。
また、表示装置20は、上記ヒヤリハットポイントにおける危険因子オブジェクト(ヒヤリハットオブジェクト)を後述するようにイメージ化して表示する(ステップS8)。尚、車両が走行する道路上の画像を撮像するビデオカメラがヒヤリハットポイントの画像を撮像しており、そのデータが記録されている場合はその地点の画像をそのまま表示しても良い。
【0020】
運転者は、ウインドウディスプレイに表示されたヒヤリハットオブジェクトを確認して、そのポイントを回避した別経路を選択するかどうかを設定する(ステップS9)。そして、運転者がヒヤリハットポイントの通過を選択した場合は(「NO」)、そのポイントのオブジェクトデータが経路中に記録される(ステップS10)。それから、経路中の地点が継続していれば(ステップS11,「YES」)ステップS3に戻って次の地点を確認する。一方、ステップS9で運転者が別経路を選択すれば(「YES」)そのままステップS11に移行する。
以上の処理を経路中の全ての地点について繰り返すと(ステップS11,「NO」)、CPU2は、運転注意事項を表示装置20に表示させてから経路案内をスタートさせる(ステップS12)。
【0021】
ここで、例えばVICSなどにより提供されている最新の道路状況を通信装置15を介して取得することでヒヤリハットポイントを特定し、図2における経路計算に利用することも可能である。例えば、集中豪雨などの突発的な事象や、道路工事による車線規制などヒヤリハットマップに反映されていない情報を得た場合は、パラメータ設定部5を介して緊急情報を加える設定を行い、経路計算に利用すれば良い。
【0022】
図4は、車両が走行している間にデータ収集を行い、個別車両ヒヤリハットマップを生成するためのフローチャートである。即ち、CPU2は、運転者操作情報検知部8を介して運転操作を検知、即ち車両操作データを取得すると(ステップS21)、その運転操作に異常がないか否かを判断し(ステップS22)、異常がなければ(「NO」)ステップS21に戻る。
一方、ステップS22において運転操作に異常があれば(「YES」)、パラメータ設定部6が異常が検知された運転操作の種類に応じてヒヤリハットの分類を行い(ステップS23)、その時点の車両の位置情報を位置検出部3より得て、ヒヤリハットデータを時刻と共にデータ格納部5に記録する(ステップS24)。それから、前記データを、通信制御部14及び通信装置15を介してセンター16に送信する(ステップS25)。
【0023】
図5は、図4のステップS21における「運転操作検知」に対応する処理を示すフローチャートである。尚、図5に示す処理は、図4に示す処理と並行して行なわれており、ステップS21に対応するのは、後述するステップS33である。即ち、車両のエンジンが始動されると(ステップS31)直ちに検知が開始され(ステップS32)、以降は30ms間隔でステップS33が実行され、操作情報の記録が行なわれる。そのステップS33では、運転者操作情報検知部8を介して以下の項目についての操作情報の検知及び記録が行なわれる。例えば、「ステアリング(時刻、角度)」,「アクセル(時刻、角度、操作速度[度/s]、押圧力」,「ブレーキ(時刻、角度、操作速度[度/s]、押圧力」,「ギア(時刻、ギア名)」,「車両速度[m/S,km/h]」,「縦G,横G,振動」,「音(車内、車外)」,「位置座標(緯度、経度)」,「車線走行位置」,「車両前方、側方、後方画像」,「室内(運転者の顔)画像」,「運転者の足元画像(アクセルやブレーキの操作状態を監視する)」,「車輪角度」などである。
【0024】
続いて、ステップS33で検知した各操作情報について異常な操作があるか、若しくは、その時生体センサ12によって検出される運転者の生体反応データに異常があるかどうかが判断される(ステップS34)。前者については、車両が走行する道路環境において、想定される運転者の操作に対し、検知結果が想定される範囲より外れた場合に「異常あり」と判定する。例えば、
(1)直線若しくは比較的緩いカーブで、急激なステアリング操作が検知された場合
(2)ブレーキを踏む必要がない場所で、急ブレーキ操作が検知された場合
(3)車両速度の急上昇、又は急低下が検知された場合
などである。また、後者については、例えば、運転者の心拍数や血圧が急上昇した場合などに「異常あり」と判断する。異常がなければ(「NO」)ステップS33に戻り、異常があれば(「YES」)その異常に関する情報の記録と(ステップS35〜S41)、30ms毎に行なう通常の操作情報の記録と(ステップS42)を並列処理する。
【0025】
異常情報の記録は、先ず、異常な操作が検知された機器を判定し(ステップS35)、当該機器について異常状況データを獲得して(ステップS36)その状況を判定する(ステップS37)。ここで、「異常状況データ」とは、上記(1)のケースではステアリング角速度や横Gのデータ、(2)のケースでは、車両速度やブレーキ操作速度、加速度、振動などのデータである。
それから、異常オブジェクトの抽出、分類、位置判定を行う(ステップS38〜S40)。ここで、「異常オブジェクト」とは、運転者が異常操作を行う原因になったと推定される物体や事象をいう。上記(1)のケースでは、例えば他車両が急に横から飛び出して、運転者がその車両を避けるためにステアリングを切ったとすれば、「異常オブジェクト」は上記「他車両」となる。
【0026】
また、(2)のケースでは、前方車両が急減速したため急ブレーキをかけたとしたら、その前方車両が「異常オブジェクト」となる。その他、ケースに応じて「凍結路面」や「落下物」、「歩行者」なども「異常オブジェクト」となり得る。即ち、異常オブジェクトは、車両周辺を撮像した画像データより抽出、分類が行なわれ、また、自車両を基準とする位置が判定される。そして、最後に異常状況(オブジェクトを含む)を記録する(ステップS41)。また、図4におけるステップS23の「ヒヤリハット分類」では、ステップS41で記録された異常に関するデータが利用される。
【0027】
図7は、図5のステップS38〜S40における異常オブジェクトの抽出、分類、位置判定の詳細を示すフローチャートである。先ず、ステップS34で「YES」と判定した時刻を確認(参照して記録)する(ステップS61)。それから、対象物検出用のセンサとして、車両に何が搭載されているかを確認し(ステップS62)、確認されたセンサによる計測データの記録を参照する(ステップS63)。
【0028】
ここでは、例えばステップS33で提示したような運転者を監視するカメラや車両の周辺を監視するカメラや、その他、車両の周辺に向けて設置されている超音波センサ、レーダなどが搭載されているとする。これらのデータを異常、即ちヒヤリハット反応の発生時刻から遡及して参照する。超音波センサ、レーダの計測データからは(ステップS64a,S64b)ヒヤリハット反応の対象物候補が車両の付近に存在するか否かを判定し(ステップS65)、存在する場合は(「YES」)、その対象物との距離を計測する(ステップS66)。尚、距離の計測はレーダによる。
そして、計測した距離が所定の安全距離以上であるか否かを判断し(ステップS67)、安全距離が確保されていなければ(「NO」)その対象物をヒヤリハット反応の対象物と判定し、当該対象物が存在していた位置と、当該対象物の移動速度(固定物であれば速度は「0」)を計測する(ステップS68,S69)。それから、対象物の位置及び速度を対象物判定情報として記録し(ステップS70)処理を終了(リターン)する。
【0029】
また、運転者監視カメラの画像データからは(ステップS64c)運転者の視線方向がどちらを向いているかを判定して(ステップS31)、その視線方向の先にヒヤリハット反応の対象物候補が存在するか否かを判定する(ステップS32)。尚、超音波センサ、レーダによって検知できる対象物は範囲が限定されているので、それらの計測データに基づきステップS65で対象物候補なし(「NO」)と判定した場合もステップS71に移行して再度判定を行う。そして、ステップS72で「YES」と判断すればステップS68に移行し、「NO」と判断すればそのままリターンする。
【0030】
更に、例えば、道路工事が行なわれているなどのため路面の一部が滑り易い状態にあり運転者がヒヤリとしたような場合は、ABSが緊急的に作動することでヒヤリハットポイントが認識され、そのデータがマップに追加される。そして、当該データは図4に示すステップS25でセンター16にも送信され、センター16は、受信したデータを送信元の位置から設定範囲内に位置する車両に送信する。すると、当該データを受信した車両では、上記ヒヤリハットポイントを通過する際に、道路工事のため滑り易い箇所があることを路面オブジェクトとして表示したり音声で警告するなどして運転者に報知される。
【0031】
図6は、車両の走行中にヒヤリハットポイントを通過する場合、CPU2が表示装置20を介して表示制御を行う内容を示すフローチャートである。CPU2は、車両の位置計測を行なうと(ステップS51)、車両がヒヤリハットポイントに接近しているか否かを判断する(ステップS52)。ヒヤリハットポイントに接近している場合は(「YES」)、データ格納部5のヒヤリハットマップを参照し(ステップS53)、接近しているポイントの表示オブジェクトを選択して(ステップS54)そのオブジェクトを表示させる位置を確認する(ステップS55)。
【0032】
それから、再び位置計測を行ない(ステップS56)、選択した表示オブジェクトを表示させる範囲内に車両が到達したと判断すると(ステップS57,「YES」)、表示オブジェクトを設定位置に表示させる(ステップS58)。そして、その表示ポイントを通過している間は(ステップS59,「NO」)ステップS56に戻り、ステップS58でオブジェクトの表示態様を車両位置に応じてアップデートする。表示ポイントを通過した場合は(ステップS59,「YES」)オブジェクトの表示を消去して(ステップS60)ステップS51に戻る。
【0033】
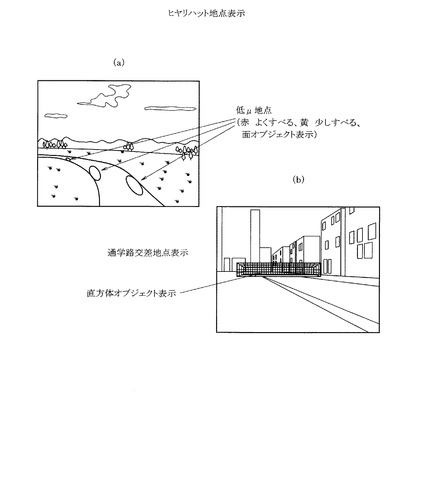
ここで、図8は、表示装置20による表示オブジェクトの表示例を示す。図8(a)は、上述した路面オブジェクトに対応する表示であり、例えばセンター16より取得したヒヤリハットマップより、最近30分以内におけるすべり易い道路面の位置(低μ地点)に関する情報があり、その路面位置を表示オブジェクトとして、ウインドウディスプレイにより外の景色に重畳して表示させた場合である。車両が走行している道路前方の路面上に、「低μ地点」を面オブジェクトで表示しており、表示色:赤はよくすべる(路面のμが相対的に低い)位置であり、表示色:黄は少しすべる(路面のμが相対的に高い)位置を示している。
【0034】
また、図8(b)は、時間帯によって歩行者が多くなる通学路のようなルートにおいて、通過予想時刻がその時間帯に係る場合、当該通学路を含む交差点等に近付いた場合、そのポイントを直方体のオブジェクトとしてハイライト表示した例である。この表示により、運転者に「今の時間帯は、次の交差点では児童の通行が多いため注意」という警告を自前に行なうことが可能となる。ここで、図8(b)の場合、上記交差点にカメラが設置されており、通学路を通行している途中の児童の画像が撮像され、その画像データを車両が取得できるようなシステム構成が採用されている場合は、取得した画像データを表示させるようにしても良い。
【0035】
その他、例えば運転技量の判定結果を参照することで、ヒヤリハットポイントに関する表示を以下のような態様で行なったり、車両制御を行うこともできる。
・停止線では略必ず停止する運転者(例えば、停止率95%以上)の場合は、停止線があるヒヤリハットポイントにおいて、左右確認を行なう指示だけを表示させる。
・停止線で止まらない傾向を有する運転者(例えば、停止率80%以上,95%未満)の場合は、先ず停止を指示する表示を行い、それから左右確認の指示を表示させる。
・停止線で止まらない運転者(例えば、停止率50%未満)の場合は、先ず停止を指示する表示を行い、停止線で止まるためのブレーキングポイントでブレーキ操作を開始しなかった場合は、自動的にブレーキをかけて車両を減速させる。
・ブレーキ操作のタイミングが遅い傾向がある運転者(ブレーキングポイントが停止線に近い、車速に応じて変化する)の場合は、ブレーキ操作指示を早めに表示させる。
【0036】
また、車両側からセンター16に緊急ヒヤリハット情報を送信するようにしても良い。例えば、車両が水没したり溝に転落するといったような走行不能となる条件で情報を送信する。例えば、アクセルを踏んでも車両が走行しない場合、或いは、車両が水没した場合は、車載システムの動作が次々と停止するので、完全に動作しなくなる直前のタイミングで情報を送信する。
【0037】
そして、センター16は、その情報を受信すると、情報の送信元である車両の周辺に位置している他の車両に、緊急ヒヤリハット情報を送信して強制的に受信させる。すると、例えば水没のケースでは、そのイメージ画像や水没しようとする車両の実画像が得られた場合はその画像データを送信して、受信車両の表示装置20に表示させるようにする。緊急ヒヤリハット情報を受信した車両は、その時点の車両位置と緊急情報の発生位置の分布とその範囲の変化から自車両の安全度を判定して確認することができる。
【0038】
以上のように本実施例によれば、CPU2は、車両の位置に基づいて、データ格納部5にデータベースとして記録されているヒヤリハットマップ中のヒヤリハットポイントを車両が通過することが想定される場合、表示装置20に、当該ヒヤリハットポイントにおける危険因子に関する情報を、フロントウインドウに投射し、実際の前方視界に重畳させて視覚的イメージで表示させるようにした。従って、運転者は、その表示を見れば、これから車両で通過しようとするヒヤリハットポイントに、具体的にどのような危険因子が潜在しているのかを容易に把握することができ、その危険の回避を容易に行うことができる。
【0039】
また、CPU2は、車両の走行中に、運転者操作情報検知部8,生体センサ12データ,通信装置15より得られるデーや情報等の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それをヒヤリハットポイントとしてデータ格納部5に記録させる。従って、車両が走行している間に判断されたヒヤリハットポイントを順次記録することで、以降に当該箇所を走行する場合、危険の回避に利用することができる。
また、CPU2は、記録したヒヤリハットポイントに関する情報を通信装置15を介して外部に送信すると共に、外部より受信したヒヤリハットポイントに関する情報もデータ格納部5に記録させる。従って、車両の外部において、各車両より収集したヒヤリハットポイント情報のデータベースを形成することができる。また、各車両が、外部より取得したヒヤリハットポイント情報を追加記録することで、夫々のデータベースの情報量を増やすことができる。
【0040】
また、運転技量判定部7は、運転者操作情報検知部8により記録された車両操作データに基づいて運転者の運転技量のレベルを判定し、CPU2は、判定された運転技量のレベルに応じて表示装置20に表示させる危険因子に関する情報の表示態様を変化させる。従って、運転技量レベルに合わせて危険因子情報の表示態様を変化させれば、運転者の感覚により一致するように危険因子情報を認識させることができる。
また、経路誘導部4は、データ格納部5に記録されたヒヤリハットポイントに関する情報を参照し、ヒヤリハットポイントを回避するように目的地までの走行経路を計算するので、危険因子が潜在する箇所を敢えて走行することがないように迂回して、安全性が高い走行経路を提示することができる。加えて、経路誘導部4は、運転者の選択設定に応じてヒヤリハットポイントを回避するか否かを決定するので、安全性と到着時間とのトレードオフバランスを運転者の好みに合わせて定めることができる。
【0041】
(第2実施例)
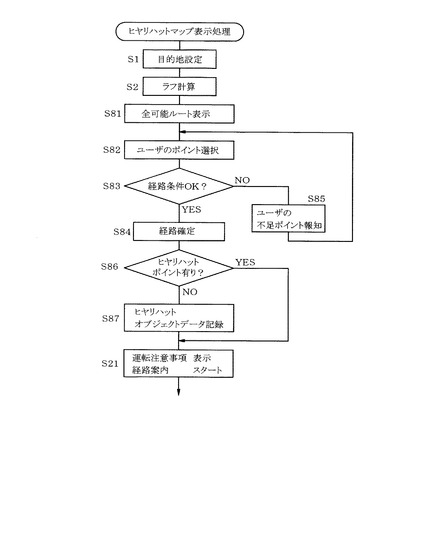
図9は本発明の第2実施例を示すものであり、第1実施例と同一部分には同一符号を付して説明を省略し、以下異なる部分についてのみ説明する。図9は、第1実施例における図2相当図である。この処理では、ステップS2を実行すると、ラフ計算によって求められた全ての可能なルートを表示させ(ステップS81)、夫々のルートに含まれているポイントのどれを経由して走行するかを運転者に選択させる(ステップS82)。尚、この場合、それらの経路中に含まれているヒヤリハットポイントも表示する。
【0042】
運転者がポイントを適切に選択することで経路条件が「OK」となった場合は(ステップS83,「YES」)経路を確定し(ステップS85)、ルートが繋がらず経路条件が「NG」であれば(「NO」)選択が不足しているポイントを運転者に報知する(ステップS84)。経路が確定した場合は、その経路中にヒヤリハットポイントが存在するか否かを判断し(ステップS86)、存在しなければ(「NO」)そのままステップS21に移行する。また、経路中にヒヤリハットポイントが存在すれば(ステップS86,「YES」)、そのポイントにおいて表示するヒヤリハットオブジェクトのデータを記録させてから(ステップS87)ステップS21に移行する。
【0043】
即ち、図3は、現在地点Aから目的地点Bに向う経路に、運転者が地点P1,P2,P3,P4,P6,P7,P8,P10,P12,P13を選択した場合を示す。この場合、ヒヤリハットポイントはP3−P5間:H1、P5−P7間:H2、P11−P13間:H3に存在すると共に、P8自体がヒヤリハットポイントH4となっている。そして、運転者は、ヒヤリハットポイントH1,H2,H4については「回避」を選択し、ヒヤリハットポイントH3は「通過」を選択したことを示している。
【0044】
以上のように第2実施例によれば、経路誘導部4は、目的地までの経路をラフ計算すると、走行可能な経路を全て表示させて、そこに含まれている通過地点並びにヒヤリハットポイントの全てを表示させ、運転者に通過地点を選択させるようにした。従って、運転者は、目的地に到達するまでの安全性、走行時間のトータルバランスを考慮して、適切なポイント選択を行うことができる。
【0045】
本発明は上記し又は図面に記載した実施例にのみ限定されるものではなく、以下のような変形が可能である。
ヒヤリハットマップを用いて、以下のように運転者の運転診断を行うようにしても良い。例えば、実際に走行している場合に検知される危険な状況記録して既存のヒヤリハットマップと比較し、危険挙動の有無を運転者に通知する。運転者は、通知された情報を確認することで自身の運転方法を把握し、以降の運転に反映させて安全運転の励行に資するようにする。例えば、後退する場合のハンドル操作や車幅間隔(左死角)、右折の内輪差、後退時の後方確認などについて判定を行う。
また、運転者が初心者であれば、車線幅の広いルート(経路)を最適と判断してルート設定することもできるが、車線幅への影響が想定されるヒヤリハットポイント、例えば「時間帯により路上駐車が多い道路」などの情報を付加することで、ルート設定の判断に有効となる情報を提供することができる。
【0046】
通信装置15を介してセンター16と通信を行う構成は、必要に応じて設ければ良く、個別車両ヒヤリハットマップだけを生成利用するものであっても良い。
また、個別車両ヒヤリハットマップにヒヤリハットポイントを追記する構成についても、必要に応じて設ければ良く、ヒヤリハットマップは、例えばCD−ROMやDVD−ROMなどの媒体で提供されるものや、或いは、通信装置15を介してセンター16よりダウンロードしたセンターヒヤリハットマップだけを利用する構成であっても良い。
ヒヤリハットポイントを考慮した経路計算や経路選択を行うナビゲーション的な機能についても、必要に応じて設ければ良く、単にヒヤリハットポイントに接近した場合に、ヒヤリハットオブジェクトを表示させる機能だけを実行しても良い。
運転技量判定部7を設けて、判定した運転者の運転技量に応じて表示態様を変化させる構成も、必要に応じて設ければ良い。
位置取得手段は、例えばVICSのインフラを利用して車両の位置を取得するような手段であっても良い。
【図面の簡単な説明】
【0047】
【図1】本発明の第1実施例であり、運転支援車載器を中心とするシステム構成を示す機能ブロック図
【図2】車載器CPU及び経路誘導部を中心として行なわれる経路計算処理、並びにヒヤリハットマップの表示処理内容を示すフローチャート
【図3】経路計算結果の一例をイメージ的に示す図
【図4】車両が走行している間にデータ収集を行い、個別車両ヒヤリハットマップを生成するためのフローチャート
【図5】図4のステップS21における「運転操作検知」に対応する処理を示すフローチャート
【図6】車両の走行中にヒヤリハットポイントを通過する場合、CPUが表示装置を介して表示制御を行う内容を示すフローチャート
【図7】図5のステップS38〜S40における異常オブジェクトの抽出、分類、位置判定の詳細を示すフローチャート
【図8】表示オブジェクトの表示例であり、(a)は路面オブジェクトの表示例、(b)は通学路を含む交差点等に近付いた場合の表示例を示す図
【図9】本発明の第2実施例を示す図2相当図
【符号の説明】
【0048】
図面中、1は運転支援車載器(危険箇所情報表示装置)、2は車載器CPU(表示制御手段, 危険箇所記録手段)、3は位置検出部(位置取得手段)、4は経路誘導部(経路案内手段)、5はデータ格納部(危険箇所データベース)、7は運転技量判定部(運転技量判定手段)、8は運転者操作情報検知部(操作データ測定手段)、12は生体センサ(生体反応データ記録手段)、15は通信装置(通信手段,交通情報取得手段)、20は表示装置(表示手段)を示す。
【特許請求の範囲】
【請求項1】
車両の位置を取得するための位置取得手段と、
車両の走行時に、運転に影響を及ぼす可能性がある危険因子が存在する箇所が記録されている危険箇所データベースと、
前記車両の位置に基づいて、前記危険箇所データベースに記録されている危険箇所を車両が通過することが想定される場合、当該危険箇所における危険因子に関する情報を、視覚的イメージで表示手段に表示させるように制御する表示制御手段とを備えたことを特徴とする危険箇所情報表示装置。
【請求項2】
運転者の精神状態が反映される生体反応の状態を、生体反応データとして測定して記録する生体反応データ測定手段と、
運転者による車両操作データを測定して記録する操作データ測定手段と、
外部より道路交通情報を取得する交通情報取得手段と、
車両の走行中に、前記生体反応データ記録手段,前記操作データ測定手段及び前記交通情報取得手段より得られるデータ又は情報の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それを危険箇所として前記危険箇所データベースに記録させる危険箇所記録手段とを備えたことを特徴とする請求項1記載の危険箇所情報表示装置。
【請求項3】
外部と通信を行うための通信手段を備え、
前記危険箇所記録手段により記録された危険箇所に関する情報を、前記通信手段を介して外部に送信すると共に、
前記危険箇所記録手段は、前記通信手段を介して外部より受信した危険箇所に関する情報も前記危険箇所データベースに記録させることを特徴とする請求項2記載の危険箇所情報表示装置。
【請求項4】
前記操作データ測定手段により記録された車両操作データに基づいて、運転者の運転技量のレベルを判定する運転技量判定手段を備え、
前記表示制御手段は、前記運転技量判定手段によって判定された運転技量のレベルに応じて、前記表示手段に表示させる危険因子に関する情報の表示態様を変化させることを特徴とする請求項2又は3記載の危険箇所情報表示装置。
【請求項5】
地図データに基づいて設定された目的地までの走行経路を計算し、経路案内を行う経路案内手段を備え、
前記経路案内手段は、前記危険箇所データベースに記録された危険箇所に関する情報を参照し、前記危険箇所を回避するように走行経路を計算することを特徴とする請求項1乃至4の何れかに記載の危険箇所情報表示装置。
【請求項6】
前記経路案内手段は、ユーザの選択設定に応じて前記危険箇所を回避するか否かを決定することを特徴とする請求項5記載の危険箇所情報表示装置。
【請求項1】
車両の位置を取得するための位置取得手段と、
車両の走行時に、運転に影響を及ぼす可能性がある危険因子が存在する箇所が記録されている危険箇所データベースと、
前記車両の位置に基づいて、前記危険箇所データベースに記録されている危険箇所を車両が通過することが想定される場合、当該危険箇所における危険因子に関する情報を、視覚的イメージで表示手段に表示させるように制御する表示制御手段とを備えたことを特徴とする危険箇所情報表示装置。
【請求項2】
運転者の精神状態が反映される生体反応の状態を、生体反応データとして測定して記録する生体反応データ測定手段と、
運転者による車両操作データを測定して記録する操作データ測定手段と、
外部より道路交通情報を取得する交通情報取得手段と、
車両の走行中に、前記生体反応データ記録手段,前記操作データ測定手段及び前記交通情報取得手段より得られるデータ又は情報の少なくとも一つに基づいて、運転に影響を及ぼす可能性がある危険因子が存在する箇所を判断すると、それを危険箇所として前記危険箇所データベースに記録させる危険箇所記録手段とを備えたことを特徴とする請求項1記載の危険箇所情報表示装置。
【請求項3】
外部と通信を行うための通信手段を備え、
前記危険箇所記録手段により記録された危険箇所に関する情報を、前記通信手段を介して外部に送信すると共に、
前記危険箇所記録手段は、前記通信手段を介して外部より受信した危険箇所に関する情報も前記危険箇所データベースに記録させることを特徴とする請求項2記載の危険箇所情報表示装置。
【請求項4】
前記操作データ測定手段により記録された車両操作データに基づいて、運転者の運転技量のレベルを判定する運転技量判定手段を備え、
前記表示制御手段は、前記運転技量判定手段によって判定された運転技量のレベルに応じて、前記表示手段に表示させる危険因子に関する情報の表示態様を変化させることを特徴とする請求項2又は3記載の危険箇所情報表示装置。
【請求項5】
地図データに基づいて設定された目的地までの走行経路を計算し、経路案内を行う経路案内手段を備え、
前記経路案内手段は、前記危険箇所データベースに記録された危険箇所に関する情報を参照し、前記危険箇所を回避するように走行経路を計算することを特徴とする請求項1乃至4の何れかに記載の危険箇所情報表示装置。
【請求項6】
前記経路案内手段は、ユーザの選択設定に応じて前記危険箇所を回避するか否かを決定することを特徴とする請求項5記載の危険箇所情報表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2007−51973(P2007−51973A)
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願番号】特願2005−238645(P2005−238645)
【出願日】平成17年8月19日(2005.8.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年3月1日(2007.3.1)
【国際特許分類】
【出願日】平成17年8月19日(2005.8.19)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]