
厚さに基づいて物体を検査しかつ分類するための自動方法および機械
本発明の目的は、自動的に非金属物体を検査しかつ分類するための方法および機械である。方法は、本質的に、少なくとも1つの加熱手段5からの熱放射に対してある程度離れた距離で、単層の流れとして進んでくる物体1の表面層または外側層4を一時的に晒し、これらの進行する物体1それぞれに、運搬平面2における単位面積当たりに印加される熱エネルギに関して物体のすべてに関して同一である交互でない熱パルスを供給し、次に、熱パルスを印加した後に指定した量の時間の経過後に、少なくとも1つの線形またはマトリックス熱検出器6、例えば熱カメラによって、前記物体それぞれの少なくとも1つの熱画像を取得し、続いて、その熱画像に含まれるデータに基づいて、各進行する物体1を分類またはカテゴリに分け、各物体に関する制御信号または作動信号を供給し、最後に、それらのクラスまたは分類に基づき、および/または供給される対応する制御信号または作動信号に基づいて、進行する物体1を分離することにあることを特徴とする。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物体、物品、製品、または複数のカテゴリの混合類似物の特徴付けおよび連続的な物理的分離の分野に関し、さらに詳細には、そのような物体、物品、および/または製品の通過する流れの自動的実時間分類の形成に関する。
【0002】
本発明は、その目的として、特に異なる厚さを有する少なくとも2つの異なるカテゴリに属する非金属物体を検査しかつ分類するための自動方法および機械を有する。
【背景技術】
【0003】
異なるタイプの電磁放射を用いて検査しかつ分類し、反射される放射または通過する物体の流れのレベルで通過する放射を解析するための種々の自動方法および装置が、既に知られている。このタイプの機械は、特にPellenc Companyの名で、仏国特許第2822235号および国際特許出願公開第02/074452号に開示されている。
【0004】
上述したタイプの自動的特徴付けのための知られている方法および装置は、異なる構造を有するが、その表面に同一の構成材料を呈する物体または物品の区別を行うことができない。
【0005】
さらに、放射および測定の適用に関する領域が結合され、入射放射の適用および反射または透過される放射の測定のための両方の手段が、減少した容積に組み合わせられるという事実のために、これは、必要な空間の問題を生じる。
【0006】
さらに、これらの知られている解決策は、比較的高い実行性であるが、これらの解決策は、特定のタイプの放射を必要とし、したがって特定の放出器および受容器を必要とし、高コストとなる。
【0007】
したがって、本発明によって提示された一般的な問題は、上述の欠点を克服することができる解決策を提案することにある。
【0008】
さらに、サーモグラフィ、すなわち物質によって放射される熱を用いる技術の原理および一定の用途が知られている。
【0009】
周囲温度における物質は、10μmに近い波長で放射し、これはすべて、加熱するとさらに大きくなる。300〜400℃で、それは、5μm近くを放出する。温度と共に極めて急速に変化する強度が検出され、白黒画像に変換される。このようにして、最も明るい物体が最も高温である画像が得られる。
【0010】
数年の間に、サーモグラフィ技術は、主に帯域3(7μm〜12μm)において劇的に進歩してきた。現時点では、新世代の中程度の価格のカメラが、用いられている。例えば、マイクロボロメータを備えた温度測定カメラは、極めて好都合な以下の特性を呈する。すなわち、
冷却装置なしで動作し、
利用可能な温度解像度は、極めて細かく、約0.1℃であり、場合によっては0.01℃である。そのため、主にわずかな温度変動に関して完全に熱平衡系がなく、光景の異なる物体間のコントラストが良好であり、
空間解像度が良好であり、320×240画素が一般に与えられ、
応答時間が、映像の流れに適合し、すなわち25画像/秒である。
【0011】
アクティブサーモグラフィに関して、本発明のサーモグラフィであり、解析されるべき製品が同一の熱パルスを受けた後で、温度が測定される構想の中で、種々の実装および用途が既に知られている。
【0012】
サーモグラフィの標準的な用途は、冶金における溶接または接合の品質制御である。米国特許第4996426号は、層状の主に金属材料内の亀裂または不良結合の存在を検出するための方法を有する。この特許は、ポリマーフォームローラとの接触によって、部品(平面)の熱画像の伝達を提案する。高温チップ(反射によるアセンブリ)または低温チップ(透過によるアセンブリ)は、導電性における途切れを示し、したがって、材料の連続性に関する欠陥を示している。測定は動的である。欠陥は、熱流の到達とこの同一の熱流による完全な迂回との間の短い時間窓の中でのみ見られる。提供された熱が、材料において均等に拡散されるとすぐに、欠陥はもはや見えなくなる。本方法は、欠陥の深さの推定にまで拡張され得るが、応答動特性は、次に、欠陥の形態および性質に応じる。
【0013】
欠陥を検出するために、米国特許第6914678号はまた、検査対象の物体の全体表面にわたって一定の速度で移動し、加熱された領域から所与の設定距離で、したがって設定期間の後で温度を調査する走査システムによって制御されるレーザを用いる。本文献は、材料に基づくこの期間に関して必要な正確な調整を求める。
【0014】
これらの技術は、合板などの木製品の品質制御のために1990年代に広まった。この用途において、伝達時間は、金属の場合に比べて相当長く、製品の加熱は5℃程度である。しかし、原理は同一であり、温度が材料に均等に拡散した後は、欠陥は見えなくなる。本方法は、大量の製品に混入した異物の検出のために、食品(へーゼルナッツ入りチョコレート、キャンディ)にまで拡張されている。
【0015】
サーモグラフィはまた、他の方法では区別することが困難な異物の検出にも適用され得る。したがって、独国特許出願公開第4317513号は、ジャガイモの流れにおける土および岩の塊の検出を提案している。それは、考慮されるべき製品の密度に基づいて異なって現れる反射された熱放射の偏光であり、反射によって測定され、したがって加熱と同時に行われる。
【0016】
サーモグラフィはまた、J.C.Krapez著の文献「Metrologie thermique:des materiaux jusqu’aux structures[Thermal Metrology:Materials up to Structures]」、1999年6月23日に記載されているように、壁の厚さを測定するために用いられ得る。本文献において、表面加熱パルスおよび温度安定化の後に加熱を測定することを提案している。本方法は、数ミリメートルの厚さの部品を扱うため、ゆっくりであることが記載されている。他の方法は、一時的加熱プロファイルの解析によって読み出しを加速化することが提案されるが、種々の熱画像を取得しかつ処理することを必要とする。
【0017】
さらに、サーモグラフィの他の用途は、以下の文献に記載されている。
英国特許出願公開第2278440号は、個別の放射率に基づいて、異なる性質の製品(ダイヤモンド/石または砂利)の分類を可能にするシステムについて記載している。その実装には、処理前の製品の一様な温度を必要とする。
国際特許出願公開第WO96/23604号は、前記製品の予備的な加熱と、所定の温度範囲に対する製品の温度の状態に基づいて製品の選別を行う、製品を分離するためのシステムについて記載している。しかし、この文献は、行われる弁別が何に基づいていているかを全く特定していない。
仏国特許出願公開第2697450号は、野菜製品の分類のための方法および装置を開示する。弁別因子は、水分レベルであり、それらの性質(高レベル/低レベル)に基づいて排除されるべき製品(芯、茎、木質化した部分)から、良好な製品(果物および野菜)を弁別することを可能にする。
米国特許出願公開第2002/0027943号は、それらの性質(構成材料)に基づき包装を分類するためのシステムおよび方法を提案する。使用中のエネルギコストが許容可能でなく、高速を可能にしない長時間の加熱について言及される。
【0018】
上記先行技術の分析から、上述の文献のいずれも、極めて薄い厚さ、特に1mm程度または1mm未満の製品の処理について特に言及していないことが明らかである。これらの先行刊行物の範囲内で解析される媒体は、測定時間スケールにおいて半無限(熱流束が、測定前に物体の対向する壁に達していない)であるか、熱エネルギが、製品において一様に分散されることもないほどの厚さであるように見える。したがって、実行される方法の大部分は、相対的に複雑で長く、一時的温度プロファイルの記録に左右される。
【発明の開示】
【発明が解決しようとする課題】
【0019】
本発明は、通過する流れの形態で来る同一の性質を有する物体、物品、または製品の特徴付けおよび実時間の分離に関連して、比較的薄い製品および薄い表面層に適用されるサーモグラフィの特性を用いて、簡素でエネルギを節約する信頼性の高い解決策を提案することを目的としている。
【課題を解決するための手段】
【0020】
本目的のために、本発明は、その目的として、非金属物体を検査しかつ分類するための自動方法を有し、非金属物体は、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、
前記自動方法が、本質的に、少なくとも1つの遠隔加熱手段の熱放射に対して前記非金属物体の表面または外側層を一時的に晒し、これら通過する非金属物体それぞれに、運搬平面における単位表面積当たり印加される熱エネルギに関して非金属物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ、例えば熱カメラによって、前記非金属物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体を分類しまたはカテゴリに分け、各非金属物体に関する制御信号または作動信号を供給し、最後に、それらのクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過する非金属物体を分離する自動方法であって、
自動方法は、
各通過する非金属物体からの1つまたは複数の熱画像のデータが、放射によって影響される表面層の厚さに関して非金属物体の弁別または特徴付けを行うように処理され、それによって少なくとも通過する非金属物体の前記表面層の構成材料が、非金属物体のすべてに関して同一であることと、
所与の非金属物体に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、一方では、前記表面層において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、表面での前記非金属物体の加熱後の温度差が、この表面層の厚さに本質的に反比例し、他方では、横方向の熱拡散、放射による冷却、および対流の現象が無視できるほど十分に短いこととを特徴とする。
【0021】
本発明は、請求項12から明らかになるような非金属物体を検査しかつ分類するための自動機械にも関する。
【0022】
本発明は、非限定的な例として添付の概略図を参照して説明される、好ましい実施形態に関連する以下の説明を用いてよりよく理解される。
【発明を実施するための最良の形態】
【0023】
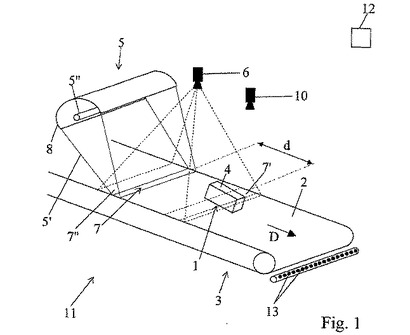
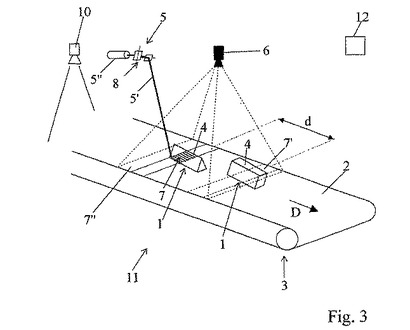
特に添付図面の図1および図3が示しているように、本発明は、非金属物体1を検査しかつ分類するための自動方法に関し、非金属物体1は、少なくとも2つの異なるカテゴリに属し、かつ物体の少なくとも1つの構成特性または構造特性に基づき、これらの物体のレベルでの少なくとも1つのタイプの弁別または特徴付けを行う目的のためのコンベヤベルト3の運搬平面2上で本質的に1層の流れで通過する。
【0024】
さらに詳細には、この方法は、本質的に、少なくとも1つの遠隔加熱手段5の熱放射に対して前記物体1の表面または外側層4を一時的に晒し、これらの通過する物体それぞれに、運搬平面2における単位表面積当たり印加される熱エネルギに関して物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ6、例えば熱カメラによって、前記物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その熱画像に含まれるデータに基づいて、各通過する物体1を分類しまたはカテゴリに分け、各物体に関する制御信号または作動信号を供給し、最後に、それらのクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過物体1を分離することからなる。
【0025】
本発明によれば、この方法は、各通過する物体1からの1つまたは複数の熱画像のデータが、放射によって影響される表面層4の厚さに関して物体の弁別または特徴付けを行うように処理され、それによって、少なくとも通過する物体1の前記表面層4の構成材料が、物体のすべてに関して同一であることを特徴とする。
【0026】
この方法はまた、所与の物体1に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、前記表面層4において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、前記物体の表面加熱後の温度差が、この表面層4の厚さに本質的に反比例し、一方、横方向の熱拡散、放射による冷却、および対流の現象が無視できるほど十分に短いことを特徴とする。
【0027】
本明細書において、「無視できる」とは、熱画像によって提供されるデータおよびこれらの画像の利用の結果に対して、その影響が極めて小さいか、または全く作用がない(典型的に、提供されるデータにおける変動の10%未満であり、5%未満である場合もある)現象を特徴付ける。
【0028】
極めて好都合な変形の実施形態に応じて、前記通過する物体1の弁別または特徴付けは、加熱手段5によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって行われる。
【0029】
好ましくは、熱パルスは、表面全体または一定の領域のみにおいて、各通過する物体1の晒された表面層4に影響を及ぼすことができる。
【0030】
熱画像によって提供される強度データは、直接的に弁別を行い、したがって、通過する物体の異なるカテゴリ間の分類を可能にする。
【0031】
本発明による方法の一般的な特性に関連して、物体1の弁別または分類を行うために必要とされる表面層4は、20μmより大きい厚さを有し、好都合には20μm〜2mmであり、好ましくは30μm〜1mmであり、熱放射の印加と熱画像化との間で経過する時間の長さは、1秒の数十分の1程度であり、好ましくは50ms〜600msであり、さらに好ましくは250ms〜400msである。
【0032】
本方法によって処理されることが意図される物体1のすべてが、少なくともそれらの外側層のレベルに、同一で均質な温度を有することを保証され得る場合には、熱パルスの印加前の熱画像化を排除することが可能であり、通過する物体の弁別または特徴付けが、次に、対応する手段5によって前記物体の制御された加熱後に取得された単一の熱画像に基づいて行われ、それによって、開始または初期の熱状態が、物体1のすべてに関して同一である。
【0033】
しかし、加熱手段の放射の印加前に解析されるべき種々の物体1の熱状態に関係なく、すなわち、種々の物体が、異なる初期熱状態を有する場合であっても、信頼性の高いサーモグラフィによる弁別を行うことができるようにするためには、本方法は、加熱手段5の放射に対して晒す前に、各通過する物体1の部分熱画像または全体熱画像を取得することにあってもよく、それによって前記通過する物体1の弁別または特徴付けは、加熱手段5によって放出された熱放射の印加前後に取得された前記熱画像から得られた差分データに基づいて行われ、それによって晒す前後の画像は、同一の熱センサ6または2つの異なるセンサによって取得される。
【0034】
添付図面の図1および図2から明らかになる、本発明の第1の実際的な実施形態に応じて、加熱手段5によって放出される放射5’の印加から結果として生じる熱エネルギの蓄積は、本質的には均一であり、運搬平面2のレベルで晒された表面7全体にわたって均等に拡散する。そのような構成は、適切な加熱手段5の実装のほか、運搬平面2に対するこの手段の所定の位置決めを必要とする。
【0035】
添付図面の図3から明らかになる、本発明の第2の実際的な実施形態に応じて、加熱手段5によって放出される放射5’によって実行される熱エネルギの蓄積は、本質的には断続的であり、運搬平面2のレベルで晒された表面7の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト3が移動する方向に延在するラインまたはバンドのセグメントに限定される。このセグメントは、任意に通過するときに物体1に対応する領域において境界が定められる。
【0036】
運搬平面の晒された領域または加熱領域7における熱エネルギのそのような断続的な印加を行うことは、不連続または断続的な放射を有する放射源、またはその放射が放射源と運搬平面との間の中間要素(マスク)によって空間的に遮断される連続または一定放射を有する放射源のいずれかを用いて達成され得る。第1の解決策は、当然のことながら、消費される電力において利益を得ることができる。
【0037】
第2の上述の実施形態に関連して、各通過する物体1の弁別または特徴付けは、表面、したがって、当該物体の晒された表面層4の照射された領域および照射されていない領域からのデータの差の活用によって、晒された後に取得された単一の熱画像に基づいて実行されることが、好都合にも提供されてもよい。
【0038】
添付図面の図1〜図3から明らかなように、熱放射の運搬平面における印加の窓は、晒された表面7、したがって、好ましくは幅が小さいか、またはコンベヤベルト3が移動するかまたは物体1が通過する方向Dに対して、本質的に交差して延在するラインからなるバンド形態の加熱領域を画定する。
【0039】
さらに、好ましい方法において、熱放射は、好ましくは赤外線型または大半が赤外線成分である集束放射であり、特に通過する物体1の最大高さより少なくともわずかに高い運搬平面2の上の少なくとも最小距離に位置する印加手段8によって供給される。
【0040】
さらに、第2の上述の実施形態に関連して、加熱手段5によって生成され、かつ運搬平面2に向かって向けられる熱放射の一部は、反射マスク5”’によって遮断され、前記加熱手段5によって放出される放射のすべてが、前記加熱手段5の一部を形成しかつ印加手段8を形成する反射集中要素によって、運搬平面2の晒された表面7に印加されるように提供されてもよい。
【0041】
特に、物体1の流れが、(構成材料、構造、組成などに関して)多種多様性を呈する場合および/または、弁別または特徴付けが、極めて信頼性が高くあるべきで、解析の複数の判断基準およびパラメータに基づくことができる場合には、本方法は、また、例えば、磁気検出器、分光計、および白黒またはカラーの映像カメラによって形成される群から選択される少なくとも1つの追加センサ10によって、通過する物体1に関連する追加データを取得することと、これらの追加データの活用の結果を、1つまたは複数の熱画像に含まれるデータの活用の結果と組み合わせて、前記通過する物体1の弁別または特徴付けを行うこととにあってもよい。
【0042】
前記少なくとも1つの追加センサ10が、物体1の通過方向において加熱手段5から上流側に配置される(または加熱領域7から上流側に検査窓を有する)場合には、このセンサ10によって取得されたデータは、加熱手段5が断続的に印加されるときに、前記加熱手段5を制御するために、変形として、または補足方法において用いられ得る。
【0043】
本発明は、また、添付図面が概略的かつ部分的に示すように、非金属物体1を検査しかつ分類するための自動機械11に関し、非金属物体1が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルト3(必要に応じて、機械11の形成部品でもある)の運搬平面2上で本質的に1層の流れで通過し、物体1の少なくとも1つの構成特性または構造特性に基づいて、これらの物体1のレベルで少なくとも1つのタイプの弁別または特徴付けを行うことを可能にする。
【0044】
この機械11は、一方では、少なくとも1つの遠隔加熱手段5を備え、遠隔加熱手段5は、前記通過する物体1の表面層または外側層4をその熱放射に一時的に晒すことができ、これらの通過する物体それぞれに、運搬平面2における単位表面積当たり印加される熱エネルギに関して、物体のすべてに対して同一である交互でない熱パルスを供給し、自動機械は、他方では、少なくとも1つの線形またはマトリックス熱センサ6、例えば熱カメラを備え、線形またはマトリックス熱センサ6は、通過方向において前記少なくとも1つの加熱手段5から下流側に所定の距離で配置され、かつ前記物体それぞれの少なくとも1つの熱画像を取得可能であり自動機械は、最後に、少なくとも1つの処理ユニット12を備え、処理ユニット12は、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する物体1を分類しまたはカテゴリに分けることができ、各物体に関する制御信号または作動信号を供給することができ、前記少なくとも1つの処理ユニット12は、それらのカテゴリまたはクラスおよび供給される対応する制御信号または作動信号に基づいて、通過する物体1を分離することができる少なくとも1つの手段13に接続される。
【0045】
この機械は、熱放射または各熱放射が印加される領域、すなわち加熱領域7を、それぞれ関連付けられる熱画像化領域または各それぞれに関連付けられる熱画像化領域7’が印加される領域から分離する距離dが、一方では、各通過する物体1の構成材料の表面層4に吸収される熱エネルギが、この層において本質的に均質である分布を有するように十分に長く、他方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短いことを特徴とする。
【0046】
また、各通過する物体1からの1つまたは複数の熱画像のデータが、前記表面層4の厚さに関して物体の弁別または特徴付けを行うために処理され、それによって、少なくとも通過する物体1の表面層4の構成材料が、物体のすべてに関して同一であることを特徴とする。
【0047】
好ましくは、処理ユニット12は、加熱手段5によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって、前記通過する物体1の弁別または特徴付けを行う。
【0048】
本発明の特徴によれば、運搬平面2を形成するコンベヤベルト3は、一定の変位速度を有し、前記少なくとも1つの加熱手段5および前記少なくとも1つの熱センサ6が、前記運搬平面2の上に配置される。さらに、熱放射または各熱放射が印加される領域、すなわち加熱領域7を、それぞれ関連付けられる熱画像化領域またはそれぞれ関連付けられる熱画像化領域7’が印加される領域から分離する距離dが、一方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短く、他方では、各通過する物体1の構成材料の表面層4に吸収される熱エネルギが、この層において本質的に均質である分布を有するように十分に長い。
【0049】
添付図面の図もまた図示しているように、遠隔加熱手段5によって供給される放射5’は、晒された表面または加熱領域7を形成し、コンベヤベルト3が移動するか、または物体1が通過する方向Dに対して本質的に交差して延在する、運搬平面2の狭いバンドまたはラインに影響を及ぼすように向けられ、前記放射5’は、好ましくは赤外線型または少なくとも大半が赤外線成分を有する集束放射である。
【0050】
図1および図2から明らかになる、本発明による機械11の第1の実施形態に応じて、加熱手段5は、一方では管状焦点を有する放射線源5”または本質的に特定の焦点または細長い焦点を有する放射源の整列と、他方では偏向素子8および放射集中素子5’との組合せからなり、前記加熱手段5を形成する2つの上述の構成要素5”および8は、成形された延長部を有し、運搬平面2の幅の実質的な部分に対して交差して、好ましくはこの全体幅にわたって延在し、集束放射を受ける運搬平面2のベルト形態の加熱領域7の全体表面にわたって本質的に均一で均質な熱エネルギの蓄積を互いに協働して実行する。
【0051】
好都合なことに、管状放射源5”は、例えば、運搬平面2に向かって回転される前記管5”の表面の上の金属堆積物の形態の反射マスクまたは層5”’を備える放射管からなり、放出された放射の略全体が、例えば、中間赤外線領域の放射、好ましくは2000nmより長い波長を有する放射を放出する型の前記放射管5”と組み合わせられる偏向集中素子8によって、前記運搬平面2に向かって向けられる。
【0052】
好ましくは、1つまたは複数の熱センサ6は、各通過する物体1に関して、前記物体を晒す前後の画像化を実行するか、または熱放射5’を用いて、処理ユニット12が、前記熱放射5’へ晒される前後で取得される熱画像から得られた差分データに基づき、前記通過する物体1の弁別または分類を行う。
【0053】
添付図面の図3に示される、本発明による機械11の第2の実施形態に応じて、加熱手段5は、(例えば、垂直軸を有する2つの枢動ミラーの形態の)2次元走査を有する印加デバイス8と組み合わせた、連続放出型または断続放出型のレーザ光源5”からなり、それによって、熱エネルギの蓄積は、断続性であり、運搬平面2のレベルで晒された表面7の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト3が移動する方向に延在するラインまたはバンドのセグメントに限定される。任意に、このセグメントは、通過するときに物体1に対応する領域において境界が定められる。
【0054】
この第2の実施形態の範囲内で、処理ユニット12は、表面7の照射された領域および照射されていない領域からのデータの差の活用、したがって、当該物体1の表面層4の晒された部分によって、晒された後に取得された単一の熱画像に基づいて、各通過する物体1の弁別または特徴付けを行うことができる。
【0055】
前記第2の実施形態に関連して、熱放射5’の印加、したがって断続的に蓄積する加熱手段5のエネルギ消費を最適化する目的のために、機械11は、また、通過方向において加熱手段5から上流側に位置決めされる、運搬平面2における通過する物体1の見かけ上の表面を位置決めして画定するためのデバイスを備えることができ、それによって、見かけ上の表面を位置決めしかつ画定するためのこのデバイスに取得されたデータが、走査ユニットを備えたレーザ光源5”/印加装置8の形態で、前記加熱手段5を制御するために用いられる。
【0056】
弁別に関して機械11の性能レベルを増大する目的のために、機械11は、実時間で、熱以外の性質に関する通過する物体に対する追加データを任意に得ることができる。
【0057】
本目的のために、機械11は、次に、磁気検出器、分光計、および白黒またはカラーの映像カメラによって形成される群から選択される少なくとも1つの追加センサ10を備えることができ、これらの追加データの活用の結果が、通過する物体1の弁別または特徴付けを行うための1つまたは複数の熱画像に含まれるデータの活用の結果と、処理ユニット12において組み合わせられる。
【0058】
物体1の位置決めおよび画定/識別のための上述の装置は、任意に、加熱領域7から上流側に配置されるそのような追加センサ10からなることができる。
【0059】
機械11は、さらに、前記で明確に記載されかつ図に示した手段に加えて、利用者またはオペレータによるプログラミング、および他の設備またはシステムとの連結を含む、上述の方法の実装のために必要な他の手段(機器およびソフトウェア)のすべてを備えることが十分に理解されよう。当業者が既に知っており、当業者の範囲内にあるこれらの他の手段については、本明細書ではこれ以上記載しない。
【0060】
異なるタイプの分類を解決するように構成された、本発明に関して可能な異なる実際的な実施形態をよりよく示すために、本発明による方法および機械の複数の具体的な実施形態および応用が、以下にさらに詳細に記載される。
【0061】
後述の種々の実施形態および用途は、一般に、Pellenc Companyの上述の特許の2つの出願に基づき、1層に広がり、平面コンベヤベルト3の上で安定化される高速に通過する物体1(1m/s〜3m/s)を有する。
【0062】
一般的な原理が、図1および図3において提供される。
【0063】
機械11は、通過する物体または製品1の少なくとも1つの加熱手段5を備え、加熱手段5は、レーザ源または熱型ランプ(グローバ、白熱灯、ハロゲンランプ、キセノンフラッシュランプなど)のいずれかを、放射源5”として組み込み、2000nmより大きい波長に好ましく位置するエネルギを生成し、それによって、ユニットがコンベヤベルト3上に設置され、機械11は、さらに、コンベヤベルト3の幅全体にわたって強い照明および幅の小さい領域7を形成する、例えば、楕円ミラーまたは反射体などの偏向型または集束型の印加手段8を備える。したがって、任意の物体1が、このコンベヤベルト上で通過するとき、加熱手段5の特性に応じて、数ミリ秒の熱パルスに晒される。
【0064】
画像取得が、物体1または製品の表面層4における熱の拡散後に行われる場合には、線形またはマトリックス熱カメラ6は、少なくとも1つの測定領域7’を可視化する。加熱前に配置される制御領域または参照領域7”もまた、加熱前の物体1の表面温度を示すために、可視化され得る。カメラ6がマトリックスカメラである場合には、視野は、図1および図3に示されているように、同じカメラが、同時に2つの領域7’および7”を可視化するように、選択されることができる。カメラ6が線形カメラである場合には、領域7”は、同一であることが好ましい第2のカメラ(図示せず)によって可視化されるべきである。
【0065】
加熱領域7および後部画像化領域7’は、用途に応じて可変である距離dによって分離される。
【0066】
任意に、異なる性質(色覚、赤外線、分光計など)の別のセンサ10が、カメラ6の前または後に同一のコンベヤベルトの上に配置され得る。センサ10によって提供される情報は、カメラ6によって提供される情報と組み合わせられることができ、適切なコンピュータおよびアルゴリズム(処理ユニット12)によって、物体1の組み合わせた分類を結果としてもたらす。コンベヤベルトの終わりで、分離手段13を形成するノズルバーのノズルのいくつかが、選択された物体を取り出すために作動される。
【0067】
分類されるべき物体1は、例えば、厚紙、プラスチック(包装、フィルム、袋、電子機器または自動車に起因する削りかす)、または堆肥化または他の生物的処理のために分類されるべき生物学的廃棄物である。
【0068】
物体1は、一般に、主に2つの形態、ばらばらの状態または固まりになった状態で分類センタに保管される。一般に、物体1は、それらの表面温度が均等に広がるほど十分に長い間その場に放置されるが、特に野外の保管の場合には(太陽、雨、霜の作用)、これは常に当てはまるわけではない。したがって、機械11を組み込んだ分類ラインに投入された後で、それらの温度は、1度から数度の範囲で変化する可能性がある。あるいは、リサイクルセンタにおいて、物体1は、分類領域直前で高温洗浄段階を通過する可能性があり、それらの温度はさらに均等に広がる。
【0069】
各物体1は、最初は、コンベヤベルト3で加速され、次に安定化される。コンベヤベルトの速度は、物体の大部分が滑ったり転がったりしないようにすると同時に、物体1の性質に基づいて1層に確実に広がるように最適化される。一般に採用される速度は、1m/s〜3m/sで変化する。
【0070】
各物体1は、最初は、第1の熱画像を取得することができる制御領域7”を通過する。第1の熱画像は、物体1の開始温度を示す。一般に、物体は、明らかに、コンベヤベルト3の底部でより低い温度によって取り外されるようになる。なぜなら、コンベヤベルト3は、手段5によって連続的に加熱されるのに対して、物体は、高速で通過するだけであるからである。
【0071】
物体1は、次に、これもその表面層4全体にわたって分散される熱パルスを光ける領域7を通過する。この領域7の好ましい幅は、5cm〜10cmである。この幅は、通過の瞬間を可能な限り十分に特徴付けるために削減され得る。
【0072】
物体が薄い(0.5mm未満)場合には、物体1が、距離dを進んでいる間に、受け取られた熱は、その表面層4に均等に広がり、物体が深いまたは厚い(以下のモデル化参照)場合には、受け取られた熱は、物体の深さに拡散される。距離dは、材料の性質および分類されるべき物体の表面層の厚さに基づいて選択される。距離dの大きさの程度は、100mm〜600mmである。この移動中に、物体の表面層の放射による冷却は、以下に示されるように、無視できる範囲である。
【0073】
物体が領域7’を通過するとき、第2の熱画像が取得され、熱安定化後の物体1の温度を知ることができる。加熱前後の温度差は、考慮される物体1の全体的な加熱を提供する。
【0074】
同一の領域に配置される1つ(または複数)の他のセンサ10は、重要な追加情報を提供することができる。具体的には以下の通りである。
熱コントラストが、熱画像において十分に物体を位置決めするためには不十分である場合には、コンベヤベルト3上の物体1の位置と、最も適したセンサ10は、カラー映像カメラであり、
他の外観の判断基準、特にその色およその印刷パターンの特性(映像カメラ)と、
例えば、Pellenc Companyによる上述の仏国特許出願およびPCT出願に記載されるような、赤外線分光計によって提供される物体の構成材料とである。
【0075】
物体1の構成材料が知られている場合には、測定される加熱は、第1の層または表面層4の厚さを推論することを可能にする。したがって、例えば、質量はその厚さに直接に関連があり、その比質量(フランス規格の場合には224g/m2より大きいかまたは小さいか)によってのみ異なるため、厚紙から紙を識別することが可能である。
【0076】
最後に、センサ6および10からのデータを用いて組み合わせられた分類装置の形態である機械11は、各物体1を取り出すかどうかを決定することを可能にする。ここでは、1列の取り出しノズル13だけが図示されているが、この例は、決して限定するためではない。製品または物体1の流れの同じ側または2つの対向する側に、2つの平行な列のノズルを用いて、特に三元分類を有することも可能である。
【0077】
上述の動作の変形は、物体の通過中に3つ以上の画像を取得することであり、これはマトリックスカメラを用いると簡単である。実際には、加熱段階中または熱拡散段階中のいずれかに取得された中間画像を用いることが、いくつかの場合において好都合であり得る。
【0078】
本発明のよりよい理解を可能にするために、およびその理論的な根拠を実証するために、活用される現象の熱モデル化に頼ることが好都合である場合がある。
【0079】
薄い物体において熱が均等に広がるためにかかる時間
熱パルス後の物体の展開は、1次元に関して表現され、熱源がない場合の熱の式によって決定される。
δT/δt=α・δ2T/δx2
ここで、Tは、温度であり、tは、経過時間であり、xは、深さであり、αは、製品の拡散率である。
【0080】
半無限媒体において、すなわち、熱拡散の時間に対して厚さが大きい場合、この時間は、文字通り、Td=e2/4αによって提供される。式中、eは、熱流束が到達する厚さである。
【0081】
この期間の終わりで、物体を構成する薄い層の極値に到達される場合には、拡散が止まり、次の段階中に温度が均等に広げられる。熱パルスから数えられるこの均質化期間は、Th=2・Tdと推定される。
【0082】
厚紙の場合には、αは0.14mm2/sに等しい。e=100μmの場合にはTd=18msであり、したがって、Th=36msである。
【0083】
さらに、熱パルスが、表面の単一の領域に位置している場合には、その側面において極めてゆっくり拡散することを留意されたい。横拡散1mmの場合には、Td=1.8sであり、2mmの場合にはTd=7.2sである。
【0084】
したがって、熱拡散は、物体の厚さに急速に(1秒の何分の1で)拡散するが、その横拡散は、本発明者らの時間スケールでは無視できるということは可能である。同様の結論が、その拡散率が近く、厚さが少し大きい(500μmまでで、Td=400msに対応する)プラスチックに関して有効である。
【0085】
薄い厚紙に関する最終的な加熱計算
紙または厚紙の熱容量として、松の熱容量C=920kJ/m3Kが採用される。総吸収エネルギ(幅800mmの機械の場合)が、2000Wであり、コンベヤベルトが、3m/sで通過する場合には、このエネルギは、以下のように分散される、すなわち2000J/s/(3m/s×0.8m)=833J/m2である。厚さ200μmの厚紙の場合には、このエネルギ流れは、2×10−4mにわたって分散され、または、体積密度W=4165kJ/m3である。したがって、加熱は、W/C=4.5℃である。50μmの薄紙の場合には、同様の推論で18℃となる。
【0086】
したがって、これは、極めて著しい加熱であり、初心者レベルの製品ラインのカメラであっても測定することが容易である。均質な温度で保管される製品の場合には、この加熱は、加熱前に制御画像を不必要にするのに十分である場合がある。
【0087】
加熱された物体の放射による冷却
ステファンボルツマンの公式W=σ・T4は、周囲温度における物体に適用され得、加熱された物体による放射によって再度放出される流れの大きさの程度を提供する。300K(27℃)で、W=460W/m2または0.046W/cm2である。
【0088】
さらに、その温度が極めて近いその環境の物体によって受けられる放射は、この放射を広範囲に補償する。正味流れは、周囲の媒体に関する温度差ΔTに関して、300Kの周囲温度の付近で公式を微分することによって計算される。
ΔW=4×σT3ΔT=6.16×ΔT
例えば、前記で求められた最大値または最も好ましくない値は、
ΔT=18℃でそのとき、ΔW=111W/m2である。
【0089】
この推論において、次の紙の厚紙層への伝導による熱伝達は、無視される。実際には、2つの層の間に小さな空隙の存在でさえ、主要な熱伝達を下向きの放射によって行うことができ、伝導によってではない。にもかかわらず、この表面層の2つの面における冷却を考慮する必要があり、ここでは、ΔW’=222W/m2であり、m2は、加熱表面(1つの面)の面積である。
【0090】
加熱段階が約800J/m2(上記参照)で提供される場合には、熱は、放射によってただゆっくり放出される(最も薄い紙の場合には4秒より長く、厚い厚紙の場合には1分までかかる)。したがって、少なくとも2分の1秒分離れた、上述の画像化の2つのインスタンス間には、これらの物体の放射による冷却を無視することができる。
【0091】
既に上述したように、加熱手段5は、種々の実施形態において提供されることができ、それぞれ特定の利点および制限を説明する。
【0092】
物体1の制御された加熱を実行するための第1の可能性は、中間赤外線放射(MIR)を実装することにある。
【0093】
染料およびインクに関係なく、低い貫通深さおよび強力な吸収の両方を確保するために、2000nmより大きな波長の集中照明が望ましい。この範囲における吸収率は、有機製品のすべてに関して80%を上回る。
【0094】
強力な吸収というまさにその事実から、放射の貫通深さは低く(3000nmを超え、水に関して約20μmの後で90%の減衰)、表面加熱を保証する。したがって、製品の第1の層のみが、熱のフラッシュによって影響を及ぼされることを保証する。この推論はまた、薄すぎると、製品は放射のすべてを止められないということを意味すること留意されたい。厚さ10μmのプラスチックの袋は、波長を伴うエネルギの10%〜50%のみを収集する。
【0095】
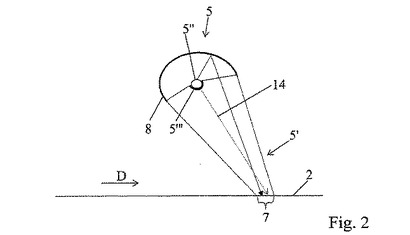
本発明による照明系の形態における加熱手段5の変形の実施形態の図は、添付図面の図2において提供される。
【0096】
円筒の放射管5”を用いたそのような照明を作製することは可能である。これらの管は、インク乾燥系またはガラス溶融炉の標準的な工業構成部品である。それらのコストは中程度であり、耐用期間は年単位で計数される。830℃または1100°Kの表面温度で、放射エネルギW=8.3W/cm2が、黒体の法則に基づいて計算される。
【0097】
放射ピークの波長は、λp=2630nmである。
【0098】
この温度は、本発明者らの問題に関して適切であることが分かっている。この温度に関して、直径1cmの管の放射は、リニアメータ当たり2500Wを提供するのに十分である。
【0099】
製品が通過する軸における狭いバンド7において熱パルスを集中することは重要である。製品の循環に関する理由(350mmを上回る通過の高さ)のほか、安全性の理由(火災の危険)のために、照明は一般に、コンベヤベルトに近づけることはできない。それにもかかわらず、本発明によれば、熱流れを集中することは可能である。楕円反射体8が、管5”の周囲に配置される。焦点の1つが管自体であり、それにより他の焦点がコンベヤベルトに近づけるように構成される。したがって、反射体8を通過する任意の熱線は、領域7でコンベヤベルトに接触するように反射される。例えば、管から反射体の底部までの距離が約12cmであり、管からコンベヤベルトまでの距離が約50cmである場合には、領域7が、コンベヤベルト3によって形成される運搬平面2にわたって約5cmの幅を有する。
【0100】
さらに、選択された温度に関して、運搬平面2に向かって回転されることが意図されるその表面に層5”’を配置することによって、管5”の半分を金属被覆することが可能である。これは、金属被覆された領域における放射の本質的な部分を遮断し、熱線14が放出されないか、または極めて弱く放出される。熱は次に、反射体8のそばに位置している半空間にのみ放射する。低い方の側を金属被覆することによって、加熱の瞬時の性質を損なう任意の直接的な照明が排除され、熱線のすべてが、反射体を通過するように強制され、収率を最適化する。領域7は、放射熱のほとんどすべてを受ける。
【0101】
しかし、図2に示される実施形態は、純粋に表示のためである。
【0102】
管5”からコンベヤベルト3までの大きな距離が必要でない場合のすべてにおいて、コンベヤベルトの近く、例えば、約20cmに管を配置することが可能である。この場合には、反射体8を排除し、任意に反射および集中手段によって完成される放射の角度エリアを制限するために、金属被覆層5”’のみを用いることが可能である。この場合には、領域5”’を上部に向かって配置することが好都合であり、直接放射は下部に向かって行われる。
【0103】
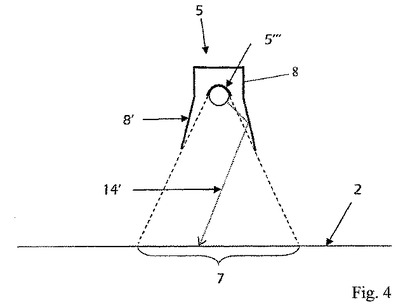
添付図面の図4は、図2に示される加熱手段5に対する加熱手段5の変形実施形態を示している。
【0104】
例えば、管の形態で成形される放射源は、放射の角度拡散を制限し、運搬平面2に対向する管の面に位置付けられる反射層5”’を備える。
【0105】
拡散角のこの限定層の作用は、好都合なことに、例えば、上部反射部品および横方向の反射部品、例えば平面鏡の一部からなる反射体8によって完成させることができる。これらの手段は、熱線を集中するが、焦点を合わせないことによって、運搬平面に向かって管によって放出される熱線を向けることを可能にする。
【0106】
参照符号14’は、反射体8を用いて運搬平面の領域7に引き込まれる熱線を表す。
【0107】
物体の制御された加熱を実行するための別の可能性は、ハロゲン照明を実装することにある。
【0108】
実際に、上述の特許出願に記載されるように、楕円反射体と組み合わせられるハロゲン管によって熱パルスを作製することも可能である。これは、赤外線分光計および熱カメラに関して同一の照明を用いることを可能にし、これにより、幅3cm未満のバンド7に照明の極めて良好な集束を可能にする。
【0109】
対照的に、本方法は複数の制限がある。
半管5”を金属被覆することを可能にせず、エネルギの半分が集束されない。反射体8を通過することなく、コンベヤベルト3に達する直接熱線はまた、製品を加熱するが対応する加熱瞬間は、不十分に規定される。
製品1の吸収率は、このスペクトル範囲において100%に近いわけではない。カラーまたは白色において中程度に明るい紙の場合には、エネルギの大部分を反射または拡散する。したがって、加熱は、前値の5%〜10%のみであり、200μmの厚紙の場合には約0.25℃、50μmの紙の場合には約1℃である。
【0110】
これは次に、低解像度のカメラの検出限界に近づき、差分モード(加熱前の制御画像)が最も重要となる。しかし、この放射モードは、マルチセンサ用途における照明数を削減するのに好都合である。
【0111】
本発明の範囲内で制御された加熱を実行するための第3の可能性は、パルス化された照明または反復パルスによる照明を実現することにある。
【0112】
短い持続期間(1ms、10μsもあり得る)の反復フラッシュに基づく加熱手段が存在する。キセノンランプまたは映写機によるこれらのフラッシュを作製することが可能である、しかし、これらのフラッシュは一般的に、可視領域において動作するように最適化され、赤外線手段におけるその収率は比較的小さい。この欠点にもかかわらず、完全に規定された加熱の瞬間の利点を提供する。
【0113】
通過するときに物体1の制御された加熱を実行するための第4の具体的な可能性は、レーザ、好ましくは赤外線による照明を実現することにある。
【0114】
制御された2次元スキャナと組み合わせたレーザによる照明は、確かにさらに複雑であるが、以下に記載されるように熱源に対して複数の利点を提供する。
【0115】
第一に、それを単一の画像にもたらすことによって、差分加熱解析を簡単にすることが可能となる。レーザによって簡単に加熱される物体の特定の先端が対象である場合には、100ms〜200msの期間の終わりで加熱を評価することが可能である。上記から分かったように、この時間は、熱を物体の厚さに拡散するが、横方向の拡散はしないようにするのに十分である。したがって、加熱領域を、熱的にも平衡である隣接領域と直接的に比較することが可能である。適切である領域のサイズの大きさの程度は、側方または直径において5mm〜10mmであり、市販の平行されたレーザビームに完全に匹敵している。
【0116】
変形は、隣接するラインを加熱しない状態で残すことによって、レーザによって加熱されたラインを作製することにある。10mm〜20mmの通過に対応する取得時間が数ミリ秒である流れによって生じた熱カメラの不可避の焦点ぼけを考慮するために、このラインを、コンベヤベルトの進行方向に対して平行にすることが好都合である。
【0117】
レーザは、対象領域にエネルギを集中させることが可能であり、それによって著しくエネルギの需要を削減するほか、関連する火災の危険を削減することを可能にする。レーザが、物体に位置している可視系から下流側に配置される場合には、物体が存在する点にのみ向けられ得る。前の構成を組み合わせることによって、物体1が存在する場所である限り、コンベヤベルト3の進行に対して平行であるラインを走査することを可能にする。
【0118】
動作のこの第2の好ましい方法は、図3の図によって示される。レーザ5”は、平行ビーム、物体1に向かって垂直軸8を有する2つのミラーの組によって偏向されるビームを作製する。交互の加熱/非加熱ラインが描かれる場合には、ラインは、物体の進行方向Dに対して平行であることが好ましい。レーザは、連続的にまたはパルスモードで動作することができる。画像取得前に、既に述べたように、物体1は、距離dの通過中にそれらの温度を安定化することを可能にする。制御領域7”は、もはや必要ではない。
【0119】
この作製によって、コンベヤベルト3の任意の加熱が回避され、エネルギの要件が劇的に削減される。約20%のベルトの充填速度が仮定され、各物体の表面の50%が加熱されると、前のエネルギの10%は、等価な熱作用を得るために十分である。したがって、2000Wの代わりに200Wのエネルギで十分である。完全に現実的である各物体の表面の10%の「調査」が申し分ない場合には、40Wが十分である。厚い製品(200μm)の場合には1℃の加熱、薄い製品(50μm)の場合には4℃の加熱が、十分であると考えられる場合には、要件もまた4分の1に削減される。用途に適した最小のレーザは、10Wの出力を有する。
【0120】
最後に、レーザは、その性質から、他の利点を提供する。
その単色性によって、その吸収がレーザの波長で最大である一定の材料に特に作用することが可能である。
この表示が、赤外線分光計などの別のセンサ10によって予め提供される場合には、構成材料などの他の判断基準に基づいて、物体の加熱の時間の長さを選択することも可能である。
【0121】
以下、本発明による方法および機械の種々の用途は、物体分類の種々のタイプに関連して示される。
【0122】
本発明の第1の用途は、紙に関し、特に印刷用紙と厚紙型の包装製品との間の弁別に関する。
【0123】
この用途は、著しく拡散しかつ不透明である構造化された(繊維)製品を含む。MIR波長において、それは、極めて吸収率が高い、その放射率が高く(>0.9)で一定である。
【0124】
弁別は、近い外観の2つの印刷製品に関連するものとする。
厚さが250μm〜400μmまで変化する小さな包装用厚紙と、
雑誌および広告とであり、雑誌および広告の内部の用紙は、約40μmの厚さを有するが、そのカバーは、しばしば150μmに達することが分かる。
紙の拡散率に関して、a=0.14mm2/sが仮定される、
小さな薄い厚紙について、Th_c=e2/2a=0.252/(2×0.14)s=0.224s=224msが仮定され、
雑誌カバーについては、Th_m=0.162/(2×0.14)=92msが仮定される。
【0125】
画像が安定化後、ここでは、224ms後に取得され、これは、2つの製品の最長の均質化時間である。
【0126】
3m/sでの通過によって、移動は、2点間で約670mmからである。これは、320×240画素カメラが仮定され、その画素の画像が、ベルト上側面で4mmである場合に、同一の画像における2つの画像のバンドを有するのにまさに十分である。
【0127】
約5.6℃のMIR放射による加熱は、雑誌カバーに関して計算され、小さな厚紙の場合には3.6℃が計算される。これらの値の差は、有意であり、測定可能である。
【0128】
最後に、水分の影響を考慮することが必要である。水分は、熱容量を著しく増大させ、したがってより大きな厚さに相当する。したがって、任意の非常に濡れた紙は、厚紙と混同される傾向がある。この場合は、汚染された製品が望ましくなく、ほとんど常に濡れているため、リサイクル対象に準拠している。したがって、分類装置は、濡れた紙を処分する傾向がある。
【0129】
最後に、分離された紙片(またはコンベヤベルトの上に配置されたプラスチックフィルム)などの極めて薄い製品の場合には、コンベヤベルト自体およびそのより高い温度が、物体を通過することを示している。これは、紙として製品をさらに分類する傾向がある。したがって、その作用は、プラスチックフィルムの場合を除いて好ましい。
【0130】
本発明の第2の用途は、製品、特に多層ポリマー材料(PET)から構成される包装に関する。
【0131】
区別は、ここでは中でも無色の透明な瓶に関連付けることである。このような無色の透明な瓶は、1層のPET層または少なくとも3層の並列層のいずれかで製作され、それによって中心層は、気体(O2またはCO2)に対する障壁を形成する材料からなる。この材料は、例えば、ナイロンである。示された別の場合は、近いがさらに簡単であり、洗浄後であっても、表面の上に、ラベルまたはプラスチックのスリーブがある。この場合には、表面上のラベルの存在を特徴付けることが必要である。
【0132】
多層を加熱した後、熱は、主に第1の厚さ(表面層)を貫通する。実際には、層は、一体ではなく、第2の層に対する伝導は極めて限定される。現象は、加熱中に、光学的不連続性が、入射エネルギの一部の上向きの反射を形成するという事実によって際立っている。
【0133】
単層の瓶は、一般に、約400μmの厚さを有する。3層である場合には、中心層は薄く、約20μmであり、それぞれ約190μmの2つの層を分離する。
単層:Th_m=e2/2a=0.42/(2×0.14)s=0.571s=571ms
3層(第1の層):Th_t=0.192/(2×0.14)=129ms
である。
【0134】
したがって、2つの場合の間を弁別するために少なくとも250ms待つことが必要であり、理想的には570msであり、1500mmの移動に相当する。この最後の値は、2枚の画像を同一のカメラ6を用いて処理することを妨げる。
【0135】
これは、30℃に向かう物体の自然冷却において、通常95℃で実行される洗浄出力で動作することが可能である。3層瓶は、1層より高速で表面を冷却する。したがって、単一の画像のみが必要である。
【0136】
本発明の第3の用途は、プラスチック材料から構成される袋およびフィルムの分類に関する。
【0137】
プラスチックフィルムは、PE型ポリオレフィンまたはPP型ポリオレフィンから構成されることも最も多く、同一の材料から構成される固体物体の分光測定法によって識別することが困難である。特に、カーボンブラックの内層、特定のタイプの多層を有するPEHDは、PELDプラスチック袋に極めて近いスペクトルを有する。したがって、先の場合に関して、極めて顕著な厚さにおける差によって分類することが可能である。このタイプの分類は、PE(LDまたはHD)の存在を既に決定した赤外線分光計に加わる。熱慣性が低いため、画像取得は、PEHD瓶の全体的な安定化の前に、理想的なコントラストに関して加熱領域後に高速で行われなければならない。
【0138】
本発明の第4の用途は、堆肥の浄化に関する。
【0139】
第一に、主に有機製品の流れが、未加工の廃棄物の流れから始める選別によって得られる。一般に、80mmメッシュが、80%を超える有機材料(食品屑、台所屑、野菜屑)、すなわち水分の多い微粒子に凝縮する流れを、微粒子(通過断片)から得ることを可能にする。
【0140】
2つのタイプの汚染物に主に直面する。
軽い汚染物:プラスチックタイプ(可撓性または剛性)と、多少汚染された紙。
重い汚染物:ガラス、岩、金属、灰。
【0141】
加熱を可視化するための2つの連続画像が、再び開始される。
【0142】
当該製品は、ほとんどすべて不透明であり、したがって、狭い表面層で熱放射を容易に吸収する。
【0143】
生物学的製品は、取り込まれた水塊を覆う皮膚に似ている。これらは、かなりゆっくり拡散する(水の拡散率=0.14mm2/s)。それらの厚さは、少なくとも1mmである。水の熱容量は、すべての流体の中で最高である。したがって、これらの製品は、より低い平衡温度を有する。
【0144】
鉱物およびガラスは、水より低い熱容量を有する。しかし、これらは常に厚く(>2mm)、水の少なくとも4倍の速さで拡散する。したがって、水より急速に冷たくなり、これは、加熱段階から明らかである。
【0145】
金属は、強い反射率(90%〜95%)を有し、ほとんど加熱しない。さらに、それらの放射率は低く、所与の加熱に関して、ほとんど放射を放出しない。したがって、ほとんど黒く見える。これは、それらが熱平衡状態にある場合には、制御写真(加熱前)から真実である。
【0146】
軽い汚染物は、既に上述したように、MIR型放射に極めて敏感である。それらは、熱容量がほとんどなく、薄い。次に、軽い汚染物は、わずかに拡散し、数秒間でほとんど一定の温度を維持する。
【0147】
2つの画像間の加熱が、減少する順で示されている場合には、その結果は、
最も高温:プラスチックおよび紙、
生物学的製品、中程度に加熱、
鉱物およびガラス、わずかに加熱、
金属、ほとんど黒、これは第1の画像から得られる。
【0148】
戦略は、前例とは少し異なる。紙を安定化するために適切な時間、すなわち、約200ms〜250msが経過することを可能にする。他の製品は未だに安定化されていない。対照的に、プラスチックは、水の熱量がその温度を下げているため、含水製品より既にはるかに高温である。同様の理由から、ガラス、鉱物、および金属は、含水製品より明らかに冷たいおよび/または黒っぽい。
【0149】
次に、中間値の製品を維持することによって、極めて高温の製品および極めて低温の製品のすべてを取り出すことが決定される。このタイプの分類は、単一のセンサとして熱カメラのみを用いることができ、極めて競争力を有するようにすることが分かる。
【0150】
したがって、本発明は、種々のタイプの製品の実時間分類を行うために、放射による加熱のための素子と組み合わせたサーモグラフィカメラの用途に関する。具体的には、
第1の層の厚さに基づく紙および厚紙の弁別、
単層および多層プラスチック包装の弁別、
材料当たりの厚いプラスチック(1mmを上回る)の弁別、
堆肥を目的とした生物学的流れにおける種々の汚染物(プラスチック、紙、金属、ガラス、鉱物)の弁別である。
【0151】
前述に従って、本発明は、その厚さが20μm〜2mmの範囲に広がる、薄くて非金属の製品の場合に適する簡単な方法を提案する。
【0152】
好ましい用途において、以下の物理的現象を利用する。
単位表面積当たりの熱容量が、加熱される材料の表面層の厚さに正比例し、したがって、所与の表面放射レベルに関して、平衡における温度上昇は、この厚さに反比例する。このことから、知られている材料に関して厚さを推論することが可能となる。
熱平衡に達するために必要な時間期間は、他の熱現象(横方向の伝導、放射による冷却または対流)が無視できるほど十分に短い(500ms未満)。
厚さは、熱放射のほとんどの総吸収を少なくとも一定の波長に関して確保するほど十分である。20μm未満で、これらの条件はもはや適合されない。
【0153】
したがって、製品を異なるカテゴリに分類する目的のために、厚さによって製品を弁別することが可能である。さらに、加熱と検出との間の時間期間は、高速に通過する製品の関しても、コンパクトな機械を用いて、迅速な決定および実時間分類を可能にするほど十分に短い。
【0154】
当然のことながら、本発明は、記載され、添付図面に記載されかつ示される実施形態に限定されない。本発明の保護分野を逸脱することなく、特に種々の要素の構成の観点から、等価な技術によって置き換えることによって、改変が可能である。
【図面の簡単な説明】
【0155】
【図1】本発明による方法の実行のための本発明の第1の変形の実施形態による機械の部分斜視概略図である。
【図2】図1に示される機械の加熱手段および運搬平面の一部を示す詳細切取断面図である。
【図3】本発明による機械の第2の変形の実施形態を示す斜視概略図である。
【図4】本発明による機械の一部を形成する照明手段に関する別の変形の実施形態の図2に類似の図である。
【技術分野】
【0001】
本発明は、物体、物品、製品、または複数のカテゴリの混合類似物の特徴付けおよび連続的な物理的分離の分野に関し、さらに詳細には、そのような物体、物品、および/または製品の通過する流れの自動的実時間分類の形成に関する。
【0002】
本発明は、その目的として、特に異なる厚さを有する少なくとも2つの異なるカテゴリに属する非金属物体を検査しかつ分類するための自動方法および機械を有する。
【背景技術】
【0003】
異なるタイプの電磁放射を用いて検査しかつ分類し、反射される放射または通過する物体の流れのレベルで通過する放射を解析するための種々の自動方法および装置が、既に知られている。このタイプの機械は、特にPellenc Companyの名で、仏国特許第2822235号および国際特許出願公開第02/074452号に開示されている。
【0004】
上述したタイプの自動的特徴付けのための知られている方法および装置は、異なる構造を有するが、その表面に同一の構成材料を呈する物体または物品の区別を行うことができない。
【0005】
さらに、放射および測定の適用に関する領域が結合され、入射放射の適用および反射または透過される放射の測定のための両方の手段が、減少した容積に組み合わせられるという事実のために、これは、必要な空間の問題を生じる。
【0006】
さらに、これらの知られている解決策は、比較的高い実行性であるが、これらの解決策は、特定のタイプの放射を必要とし、したがって特定の放出器および受容器を必要とし、高コストとなる。
【0007】
したがって、本発明によって提示された一般的な問題は、上述の欠点を克服することができる解決策を提案することにある。
【0008】
さらに、サーモグラフィ、すなわち物質によって放射される熱を用いる技術の原理および一定の用途が知られている。
【0009】
周囲温度における物質は、10μmに近い波長で放射し、これはすべて、加熱するとさらに大きくなる。300〜400℃で、それは、5μm近くを放出する。温度と共に極めて急速に変化する強度が検出され、白黒画像に変換される。このようにして、最も明るい物体が最も高温である画像が得られる。
【0010】
数年の間に、サーモグラフィ技術は、主に帯域3(7μm〜12μm)において劇的に進歩してきた。現時点では、新世代の中程度の価格のカメラが、用いられている。例えば、マイクロボロメータを備えた温度測定カメラは、極めて好都合な以下の特性を呈する。すなわち、
冷却装置なしで動作し、
利用可能な温度解像度は、極めて細かく、約0.1℃であり、場合によっては0.01℃である。そのため、主にわずかな温度変動に関して完全に熱平衡系がなく、光景の異なる物体間のコントラストが良好であり、
空間解像度が良好であり、320×240画素が一般に与えられ、
応答時間が、映像の流れに適合し、すなわち25画像/秒である。
【0011】
アクティブサーモグラフィに関して、本発明のサーモグラフィであり、解析されるべき製品が同一の熱パルスを受けた後で、温度が測定される構想の中で、種々の実装および用途が既に知られている。
【0012】
サーモグラフィの標準的な用途は、冶金における溶接または接合の品質制御である。米国特許第4996426号は、層状の主に金属材料内の亀裂または不良結合の存在を検出するための方法を有する。この特許は、ポリマーフォームローラとの接触によって、部品(平面)の熱画像の伝達を提案する。高温チップ(反射によるアセンブリ)または低温チップ(透過によるアセンブリ)は、導電性における途切れを示し、したがって、材料の連続性に関する欠陥を示している。測定は動的である。欠陥は、熱流の到達とこの同一の熱流による完全な迂回との間の短い時間窓の中でのみ見られる。提供された熱が、材料において均等に拡散されるとすぐに、欠陥はもはや見えなくなる。本方法は、欠陥の深さの推定にまで拡張され得るが、応答動特性は、次に、欠陥の形態および性質に応じる。
【0013】
欠陥を検出するために、米国特許第6914678号はまた、検査対象の物体の全体表面にわたって一定の速度で移動し、加熱された領域から所与の設定距離で、したがって設定期間の後で温度を調査する走査システムによって制御されるレーザを用いる。本文献は、材料に基づくこの期間に関して必要な正確な調整を求める。
【0014】
これらの技術は、合板などの木製品の品質制御のために1990年代に広まった。この用途において、伝達時間は、金属の場合に比べて相当長く、製品の加熱は5℃程度である。しかし、原理は同一であり、温度が材料に均等に拡散した後は、欠陥は見えなくなる。本方法は、大量の製品に混入した異物の検出のために、食品(へーゼルナッツ入りチョコレート、キャンディ)にまで拡張されている。
【0015】
サーモグラフィはまた、他の方法では区別することが困難な異物の検出にも適用され得る。したがって、独国特許出願公開第4317513号は、ジャガイモの流れにおける土および岩の塊の検出を提案している。それは、考慮されるべき製品の密度に基づいて異なって現れる反射された熱放射の偏光であり、反射によって測定され、したがって加熱と同時に行われる。
【0016】
サーモグラフィはまた、J.C.Krapez著の文献「Metrologie thermique:des materiaux jusqu’aux structures[Thermal Metrology:Materials up to Structures]」、1999年6月23日に記載されているように、壁の厚さを測定するために用いられ得る。本文献において、表面加熱パルスおよび温度安定化の後に加熱を測定することを提案している。本方法は、数ミリメートルの厚さの部品を扱うため、ゆっくりであることが記載されている。他の方法は、一時的加熱プロファイルの解析によって読み出しを加速化することが提案されるが、種々の熱画像を取得しかつ処理することを必要とする。
【0017】
さらに、サーモグラフィの他の用途は、以下の文献に記載されている。
英国特許出願公開第2278440号は、個別の放射率に基づいて、異なる性質の製品(ダイヤモンド/石または砂利)の分類を可能にするシステムについて記載している。その実装には、処理前の製品の一様な温度を必要とする。
国際特許出願公開第WO96/23604号は、前記製品の予備的な加熱と、所定の温度範囲に対する製品の温度の状態に基づいて製品の選別を行う、製品を分離するためのシステムについて記載している。しかし、この文献は、行われる弁別が何に基づいていているかを全く特定していない。
仏国特許出願公開第2697450号は、野菜製品の分類のための方法および装置を開示する。弁別因子は、水分レベルであり、それらの性質(高レベル/低レベル)に基づいて排除されるべき製品(芯、茎、木質化した部分)から、良好な製品(果物および野菜)を弁別することを可能にする。
米国特許出願公開第2002/0027943号は、それらの性質(構成材料)に基づき包装を分類するためのシステムおよび方法を提案する。使用中のエネルギコストが許容可能でなく、高速を可能にしない長時間の加熱について言及される。
【0018】
上記先行技術の分析から、上述の文献のいずれも、極めて薄い厚さ、特に1mm程度または1mm未満の製品の処理について特に言及していないことが明らかである。これらの先行刊行物の範囲内で解析される媒体は、測定時間スケールにおいて半無限(熱流束が、測定前に物体の対向する壁に達していない)であるか、熱エネルギが、製品において一様に分散されることもないほどの厚さであるように見える。したがって、実行される方法の大部分は、相対的に複雑で長く、一時的温度プロファイルの記録に左右される。
【発明の開示】
【発明が解決しようとする課題】
【0019】
本発明は、通過する流れの形態で来る同一の性質を有する物体、物品、または製品の特徴付けおよび実時間の分離に関連して、比較的薄い製品および薄い表面層に適用されるサーモグラフィの特性を用いて、簡素でエネルギを節約する信頼性の高い解決策を提案することを目的としている。
【課題を解決するための手段】
【0020】
本目的のために、本発明は、その目的として、非金属物体を検査しかつ分類するための自動方法を有し、非金属物体は、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、
前記自動方法が、本質的に、少なくとも1つの遠隔加熱手段の熱放射に対して前記非金属物体の表面または外側層を一時的に晒し、これら通過する非金属物体それぞれに、運搬平面における単位表面積当たり印加される熱エネルギに関して非金属物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ、例えば熱カメラによって、前記非金属物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体を分類しまたはカテゴリに分け、各非金属物体に関する制御信号または作動信号を供給し、最後に、それらのクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過する非金属物体を分離する自動方法であって、
自動方法は、
各通過する非金属物体からの1つまたは複数の熱画像のデータが、放射によって影響される表面層の厚さに関して非金属物体の弁別または特徴付けを行うように処理され、それによって少なくとも通過する非金属物体の前記表面層の構成材料が、非金属物体のすべてに関して同一であることと、
所与の非金属物体に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、一方では、前記表面層において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、表面での前記非金属物体の加熱後の温度差が、この表面層の厚さに本質的に反比例し、他方では、横方向の熱拡散、放射による冷却、および対流の現象が無視できるほど十分に短いこととを特徴とする。
【0021】
本発明は、請求項12から明らかになるような非金属物体を検査しかつ分類するための自動機械にも関する。
【0022】
本発明は、非限定的な例として添付の概略図を参照して説明される、好ましい実施形態に関連する以下の説明を用いてよりよく理解される。
【発明を実施するための最良の形態】
【0023】
特に添付図面の図1および図3が示しているように、本発明は、非金属物体1を検査しかつ分類するための自動方法に関し、非金属物体1は、少なくとも2つの異なるカテゴリに属し、かつ物体の少なくとも1つの構成特性または構造特性に基づき、これらの物体のレベルでの少なくとも1つのタイプの弁別または特徴付けを行う目的のためのコンベヤベルト3の運搬平面2上で本質的に1層の流れで通過する。
【0024】
さらに詳細には、この方法は、本質的に、少なくとも1つの遠隔加熱手段5の熱放射に対して前記物体1の表面または外側層4を一時的に晒し、これらの通過する物体それぞれに、運搬平面2における単位表面積当たり印加される熱エネルギに関して物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ6、例えば熱カメラによって、前記物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その熱画像に含まれるデータに基づいて、各通過する物体1を分類しまたはカテゴリに分け、各物体に関する制御信号または作動信号を供給し、最後に、それらのクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過物体1を分離することからなる。
【0025】
本発明によれば、この方法は、各通過する物体1からの1つまたは複数の熱画像のデータが、放射によって影響される表面層4の厚さに関して物体の弁別または特徴付けを行うように処理され、それによって、少なくとも通過する物体1の前記表面層4の構成材料が、物体のすべてに関して同一であることを特徴とする。
【0026】
この方法はまた、所与の物体1に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、前記表面層4において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、前記物体の表面加熱後の温度差が、この表面層4の厚さに本質的に反比例し、一方、横方向の熱拡散、放射による冷却、および対流の現象が無視できるほど十分に短いことを特徴とする。
【0027】
本明細書において、「無視できる」とは、熱画像によって提供されるデータおよびこれらの画像の利用の結果に対して、その影響が極めて小さいか、または全く作用がない(典型的に、提供されるデータにおける変動の10%未満であり、5%未満である場合もある)現象を特徴付ける。
【0028】
極めて好都合な変形の実施形態に応じて、前記通過する物体1の弁別または特徴付けは、加熱手段5によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって行われる。
【0029】
好ましくは、熱パルスは、表面全体または一定の領域のみにおいて、各通過する物体1の晒された表面層4に影響を及ぼすことができる。
【0030】
熱画像によって提供される強度データは、直接的に弁別を行い、したがって、通過する物体の異なるカテゴリ間の分類を可能にする。
【0031】
本発明による方法の一般的な特性に関連して、物体1の弁別または分類を行うために必要とされる表面層4は、20μmより大きい厚さを有し、好都合には20μm〜2mmであり、好ましくは30μm〜1mmであり、熱放射の印加と熱画像化との間で経過する時間の長さは、1秒の数十分の1程度であり、好ましくは50ms〜600msであり、さらに好ましくは250ms〜400msである。
【0032】
本方法によって処理されることが意図される物体1のすべてが、少なくともそれらの外側層のレベルに、同一で均質な温度を有することを保証され得る場合には、熱パルスの印加前の熱画像化を排除することが可能であり、通過する物体の弁別または特徴付けが、次に、対応する手段5によって前記物体の制御された加熱後に取得された単一の熱画像に基づいて行われ、それによって、開始または初期の熱状態が、物体1のすべてに関して同一である。
【0033】
しかし、加熱手段の放射の印加前に解析されるべき種々の物体1の熱状態に関係なく、すなわち、種々の物体が、異なる初期熱状態を有する場合であっても、信頼性の高いサーモグラフィによる弁別を行うことができるようにするためには、本方法は、加熱手段5の放射に対して晒す前に、各通過する物体1の部分熱画像または全体熱画像を取得することにあってもよく、それによって前記通過する物体1の弁別または特徴付けは、加熱手段5によって放出された熱放射の印加前後に取得された前記熱画像から得られた差分データに基づいて行われ、それによって晒す前後の画像は、同一の熱センサ6または2つの異なるセンサによって取得される。
【0034】
添付図面の図1および図2から明らかになる、本発明の第1の実際的な実施形態に応じて、加熱手段5によって放出される放射5’の印加から結果として生じる熱エネルギの蓄積は、本質的には均一であり、運搬平面2のレベルで晒された表面7全体にわたって均等に拡散する。そのような構成は、適切な加熱手段5の実装のほか、運搬平面2に対するこの手段の所定の位置決めを必要とする。
【0035】
添付図面の図3から明らかになる、本発明の第2の実際的な実施形態に応じて、加熱手段5によって放出される放射5’によって実行される熱エネルギの蓄積は、本質的には断続的であり、運搬平面2のレベルで晒された表面7の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト3が移動する方向に延在するラインまたはバンドのセグメントに限定される。このセグメントは、任意に通過するときに物体1に対応する領域において境界が定められる。
【0036】
運搬平面の晒された領域または加熱領域7における熱エネルギのそのような断続的な印加を行うことは、不連続または断続的な放射を有する放射源、またはその放射が放射源と運搬平面との間の中間要素(マスク)によって空間的に遮断される連続または一定放射を有する放射源のいずれかを用いて達成され得る。第1の解決策は、当然のことながら、消費される電力において利益を得ることができる。
【0037】
第2の上述の実施形態に関連して、各通過する物体1の弁別または特徴付けは、表面、したがって、当該物体の晒された表面層4の照射された領域および照射されていない領域からのデータの差の活用によって、晒された後に取得された単一の熱画像に基づいて実行されることが、好都合にも提供されてもよい。
【0038】
添付図面の図1〜図3から明らかなように、熱放射の運搬平面における印加の窓は、晒された表面7、したがって、好ましくは幅が小さいか、またはコンベヤベルト3が移動するかまたは物体1が通過する方向Dに対して、本質的に交差して延在するラインからなるバンド形態の加熱領域を画定する。
【0039】
さらに、好ましい方法において、熱放射は、好ましくは赤外線型または大半が赤外線成分である集束放射であり、特に通過する物体1の最大高さより少なくともわずかに高い運搬平面2の上の少なくとも最小距離に位置する印加手段8によって供給される。
【0040】
さらに、第2の上述の実施形態に関連して、加熱手段5によって生成され、かつ運搬平面2に向かって向けられる熱放射の一部は、反射マスク5”’によって遮断され、前記加熱手段5によって放出される放射のすべてが、前記加熱手段5の一部を形成しかつ印加手段8を形成する反射集中要素によって、運搬平面2の晒された表面7に印加されるように提供されてもよい。
【0041】
特に、物体1の流れが、(構成材料、構造、組成などに関して)多種多様性を呈する場合および/または、弁別または特徴付けが、極めて信頼性が高くあるべきで、解析の複数の判断基準およびパラメータに基づくことができる場合には、本方法は、また、例えば、磁気検出器、分光計、および白黒またはカラーの映像カメラによって形成される群から選択される少なくとも1つの追加センサ10によって、通過する物体1に関連する追加データを取得することと、これらの追加データの活用の結果を、1つまたは複数の熱画像に含まれるデータの活用の結果と組み合わせて、前記通過する物体1の弁別または特徴付けを行うこととにあってもよい。
【0042】
前記少なくとも1つの追加センサ10が、物体1の通過方向において加熱手段5から上流側に配置される(または加熱領域7から上流側に検査窓を有する)場合には、このセンサ10によって取得されたデータは、加熱手段5が断続的に印加されるときに、前記加熱手段5を制御するために、変形として、または補足方法において用いられ得る。
【0043】
本発明は、また、添付図面が概略的かつ部分的に示すように、非金属物体1を検査しかつ分類するための自動機械11に関し、非金属物体1が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルト3(必要に応じて、機械11の形成部品でもある)の運搬平面2上で本質的に1層の流れで通過し、物体1の少なくとも1つの構成特性または構造特性に基づいて、これらの物体1のレベルで少なくとも1つのタイプの弁別または特徴付けを行うことを可能にする。
【0044】
この機械11は、一方では、少なくとも1つの遠隔加熱手段5を備え、遠隔加熱手段5は、前記通過する物体1の表面層または外側層4をその熱放射に一時的に晒すことができ、これらの通過する物体それぞれに、運搬平面2における単位表面積当たり印加される熱エネルギに関して、物体のすべてに対して同一である交互でない熱パルスを供給し、自動機械は、他方では、少なくとも1つの線形またはマトリックス熱センサ6、例えば熱カメラを備え、線形またはマトリックス熱センサ6は、通過方向において前記少なくとも1つの加熱手段5から下流側に所定の距離で配置され、かつ前記物体それぞれの少なくとも1つの熱画像を取得可能であり自動機械は、最後に、少なくとも1つの処理ユニット12を備え、処理ユニット12は、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する物体1を分類しまたはカテゴリに分けることができ、各物体に関する制御信号または作動信号を供給することができ、前記少なくとも1つの処理ユニット12は、それらのカテゴリまたはクラスおよび供給される対応する制御信号または作動信号に基づいて、通過する物体1を分離することができる少なくとも1つの手段13に接続される。
【0045】
この機械は、熱放射または各熱放射が印加される領域、すなわち加熱領域7を、それぞれ関連付けられる熱画像化領域または各それぞれに関連付けられる熱画像化領域7’が印加される領域から分離する距離dが、一方では、各通過する物体1の構成材料の表面層4に吸収される熱エネルギが、この層において本質的に均質である分布を有するように十分に長く、他方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短いことを特徴とする。
【0046】
また、各通過する物体1からの1つまたは複数の熱画像のデータが、前記表面層4の厚さに関して物体の弁別または特徴付けを行うために処理され、それによって、少なくとも通過する物体1の表面層4の構成材料が、物体のすべてに関して同一であることを特徴とする。
【0047】
好ましくは、処理ユニット12は、加熱手段5によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって、前記通過する物体1の弁別または特徴付けを行う。
【0048】
本発明の特徴によれば、運搬平面2を形成するコンベヤベルト3は、一定の変位速度を有し、前記少なくとも1つの加熱手段5および前記少なくとも1つの熱センサ6が、前記運搬平面2の上に配置される。さらに、熱放射または各熱放射が印加される領域、すなわち加熱領域7を、それぞれ関連付けられる熱画像化領域またはそれぞれ関連付けられる熱画像化領域7’が印加される領域から分離する距離dが、一方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短く、他方では、各通過する物体1の構成材料の表面層4に吸収される熱エネルギが、この層において本質的に均質である分布を有するように十分に長い。
【0049】
添付図面の図もまた図示しているように、遠隔加熱手段5によって供給される放射5’は、晒された表面または加熱領域7を形成し、コンベヤベルト3が移動するか、または物体1が通過する方向Dに対して本質的に交差して延在する、運搬平面2の狭いバンドまたはラインに影響を及ぼすように向けられ、前記放射5’は、好ましくは赤外線型または少なくとも大半が赤外線成分を有する集束放射である。
【0050】
図1および図2から明らかになる、本発明による機械11の第1の実施形態に応じて、加熱手段5は、一方では管状焦点を有する放射線源5”または本質的に特定の焦点または細長い焦点を有する放射源の整列と、他方では偏向素子8および放射集中素子5’との組合せからなり、前記加熱手段5を形成する2つの上述の構成要素5”および8は、成形された延長部を有し、運搬平面2の幅の実質的な部分に対して交差して、好ましくはこの全体幅にわたって延在し、集束放射を受ける運搬平面2のベルト形態の加熱領域7の全体表面にわたって本質的に均一で均質な熱エネルギの蓄積を互いに協働して実行する。
【0051】
好都合なことに、管状放射源5”は、例えば、運搬平面2に向かって回転される前記管5”の表面の上の金属堆積物の形態の反射マスクまたは層5”’を備える放射管からなり、放出された放射の略全体が、例えば、中間赤外線領域の放射、好ましくは2000nmより長い波長を有する放射を放出する型の前記放射管5”と組み合わせられる偏向集中素子8によって、前記運搬平面2に向かって向けられる。
【0052】
好ましくは、1つまたは複数の熱センサ6は、各通過する物体1に関して、前記物体を晒す前後の画像化を実行するか、または熱放射5’を用いて、処理ユニット12が、前記熱放射5’へ晒される前後で取得される熱画像から得られた差分データに基づき、前記通過する物体1の弁別または分類を行う。
【0053】
添付図面の図3に示される、本発明による機械11の第2の実施形態に応じて、加熱手段5は、(例えば、垂直軸を有する2つの枢動ミラーの形態の)2次元走査を有する印加デバイス8と組み合わせた、連続放出型または断続放出型のレーザ光源5”からなり、それによって、熱エネルギの蓄積は、断続性であり、運搬平面2のレベルで晒された表面7の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト3が移動する方向に延在するラインまたはバンドのセグメントに限定される。任意に、このセグメントは、通過するときに物体1に対応する領域において境界が定められる。
【0054】
この第2の実施形態の範囲内で、処理ユニット12は、表面7の照射された領域および照射されていない領域からのデータの差の活用、したがって、当該物体1の表面層4の晒された部分によって、晒された後に取得された単一の熱画像に基づいて、各通過する物体1の弁別または特徴付けを行うことができる。
【0055】
前記第2の実施形態に関連して、熱放射5’の印加、したがって断続的に蓄積する加熱手段5のエネルギ消費を最適化する目的のために、機械11は、また、通過方向において加熱手段5から上流側に位置決めされる、運搬平面2における通過する物体1の見かけ上の表面を位置決めして画定するためのデバイスを備えることができ、それによって、見かけ上の表面を位置決めしかつ画定するためのこのデバイスに取得されたデータが、走査ユニットを備えたレーザ光源5”/印加装置8の形態で、前記加熱手段5を制御するために用いられる。
【0056】
弁別に関して機械11の性能レベルを増大する目的のために、機械11は、実時間で、熱以外の性質に関する通過する物体に対する追加データを任意に得ることができる。
【0057】
本目的のために、機械11は、次に、磁気検出器、分光計、および白黒またはカラーの映像カメラによって形成される群から選択される少なくとも1つの追加センサ10を備えることができ、これらの追加データの活用の結果が、通過する物体1の弁別または特徴付けを行うための1つまたは複数の熱画像に含まれるデータの活用の結果と、処理ユニット12において組み合わせられる。
【0058】
物体1の位置決めおよび画定/識別のための上述の装置は、任意に、加熱領域7から上流側に配置されるそのような追加センサ10からなることができる。
【0059】
機械11は、さらに、前記で明確に記載されかつ図に示した手段に加えて、利用者またはオペレータによるプログラミング、および他の設備またはシステムとの連結を含む、上述の方法の実装のために必要な他の手段(機器およびソフトウェア)のすべてを備えることが十分に理解されよう。当業者が既に知っており、当業者の範囲内にあるこれらの他の手段については、本明細書ではこれ以上記載しない。
【0060】
異なるタイプの分類を解決するように構成された、本発明に関して可能な異なる実際的な実施形態をよりよく示すために、本発明による方法および機械の複数の具体的な実施形態および応用が、以下にさらに詳細に記載される。
【0061】
後述の種々の実施形態および用途は、一般に、Pellenc Companyの上述の特許の2つの出願に基づき、1層に広がり、平面コンベヤベルト3の上で安定化される高速に通過する物体1(1m/s〜3m/s)を有する。
【0062】
一般的な原理が、図1および図3において提供される。
【0063】
機械11は、通過する物体または製品1の少なくとも1つの加熱手段5を備え、加熱手段5は、レーザ源または熱型ランプ(グローバ、白熱灯、ハロゲンランプ、キセノンフラッシュランプなど)のいずれかを、放射源5”として組み込み、2000nmより大きい波長に好ましく位置するエネルギを生成し、それによって、ユニットがコンベヤベルト3上に設置され、機械11は、さらに、コンベヤベルト3の幅全体にわたって強い照明および幅の小さい領域7を形成する、例えば、楕円ミラーまたは反射体などの偏向型または集束型の印加手段8を備える。したがって、任意の物体1が、このコンベヤベルト上で通過するとき、加熱手段5の特性に応じて、数ミリ秒の熱パルスに晒される。
【0064】
画像取得が、物体1または製品の表面層4における熱の拡散後に行われる場合には、線形またはマトリックス熱カメラ6は、少なくとも1つの測定領域7’を可視化する。加熱前に配置される制御領域または参照領域7”もまた、加熱前の物体1の表面温度を示すために、可視化され得る。カメラ6がマトリックスカメラである場合には、視野は、図1および図3に示されているように、同じカメラが、同時に2つの領域7’および7”を可視化するように、選択されることができる。カメラ6が線形カメラである場合には、領域7”は、同一であることが好ましい第2のカメラ(図示せず)によって可視化されるべきである。
【0065】
加熱領域7および後部画像化領域7’は、用途に応じて可変である距離dによって分離される。
【0066】
任意に、異なる性質(色覚、赤外線、分光計など)の別のセンサ10が、カメラ6の前または後に同一のコンベヤベルトの上に配置され得る。センサ10によって提供される情報は、カメラ6によって提供される情報と組み合わせられることができ、適切なコンピュータおよびアルゴリズム(処理ユニット12)によって、物体1の組み合わせた分類を結果としてもたらす。コンベヤベルトの終わりで、分離手段13を形成するノズルバーのノズルのいくつかが、選択された物体を取り出すために作動される。
【0067】
分類されるべき物体1は、例えば、厚紙、プラスチック(包装、フィルム、袋、電子機器または自動車に起因する削りかす)、または堆肥化または他の生物的処理のために分類されるべき生物学的廃棄物である。
【0068】
物体1は、一般に、主に2つの形態、ばらばらの状態または固まりになった状態で分類センタに保管される。一般に、物体1は、それらの表面温度が均等に広がるほど十分に長い間その場に放置されるが、特に野外の保管の場合には(太陽、雨、霜の作用)、これは常に当てはまるわけではない。したがって、機械11を組み込んだ分類ラインに投入された後で、それらの温度は、1度から数度の範囲で変化する可能性がある。あるいは、リサイクルセンタにおいて、物体1は、分類領域直前で高温洗浄段階を通過する可能性があり、それらの温度はさらに均等に広がる。
【0069】
各物体1は、最初は、コンベヤベルト3で加速され、次に安定化される。コンベヤベルトの速度は、物体の大部分が滑ったり転がったりしないようにすると同時に、物体1の性質に基づいて1層に確実に広がるように最適化される。一般に採用される速度は、1m/s〜3m/sで変化する。
【0070】
各物体1は、最初は、第1の熱画像を取得することができる制御領域7”を通過する。第1の熱画像は、物体1の開始温度を示す。一般に、物体は、明らかに、コンベヤベルト3の底部でより低い温度によって取り外されるようになる。なぜなら、コンベヤベルト3は、手段5によって連続的に加熱されるのに対して、物体は、高速で通過するだけであるからである。
【0071】
物体1は、次に、これもその表面層4全体にわたって分散される熱パルスを光ける領域7を通過する。この領域7の好ましい幅は、5cm〜10cmである。この幅は、通過の瞬間を可能な限り十分に特徴付けるために削減され得る。
【0072】
物体が薄い(0.5mm未満)場合には、物体1が、距離dを進んでいる間に、受け取られた熱は、その表面層4に均等に広がり、物体が深いまたは厚い(以下のモデル化参照)場合には、受け取られた熱は、物体の深さに拡散される。距離dは、材料の性質および分類されるべき物体の表面層の厚さに基づいて選択される。距離dの大きさの程度は、100mm〜600mmである。この移動中に、物体の表面層の放射による冷却は、以下に示されるように、無視できる範囲である。
【0073】
物体が領域7’を通過するとき、第2の熱画像が取得され、熱安定化後の物体1の温度を知ることができる。加熱前後の温度差は、考慮される物体1の全体的な加熱を提供する。
【0074】
同一の領域に配置される1つ(または複数)の他のセンサ10は、重要な追加情報を提供することができる。具体的には以下の通りである。
熱コントラストが、熱画像において十分に物体を位置決めするためには不十分である場合には、コンベヤベルト3上の物体1の位置と、最も適したセンサ10は、カラー映像カメラであり、
他の外観の判断基準、特にその色およその印刷パターンの特性(映像カメラ)と、
例えば、Pellenc Companyによる上述の仏国特許出願およびPCT出願に記載されるような、赤外線分光計によって提供される物体の構成材料とである。
【0075】
物体1の構成材料が知られている場合には、測定される加熱は、第1の層または表面層4の厚さを推論することを可能にする。したがって、例えば、質量はその厚さに直接に関連があり、その比質量(フランス規格の場合には224g/m2より大きいかまたは小さいか)によってのみ異なるため、厚紙から紙を識別することが可能である。
【0076】
最後に、センサ6および10からのデータを用いて組み合わせられた分類装置の形態である機械11は、各物体1を取り出すかどうかを決定することを可能にする。ここでは、1列の取り出しノズル13だけが図示されているが、この例は、決して限定するためではない。製品または物体1の流れの同じ側または2つの対向する側に、2つの平行な列のノズルを用いて、特に三元分類を有することも可能である。
【0077】
上述の動作の変形は、物体の通過中に3つ以上の画像を取得することであり、これはマトリックスカメラを用いると簡単である。実際には、加熱段階中または熱拡散段階中のいずれかに取得された中間画像を用いることが、いくつかの場合において好都合であり得る。
【0078】
本発明のよりよい理解を可能にするために、およびその理論的な根拠を実証するために、活用される現象の熱モデル化に頼ることが好都合である場合がある。
【0079】
薄い物体において熱が均等に広がるためにかかる時間
熱パルス後の物体の展開は、1次元に関して表現され、熱源がない場合の熱の式によって決定される。
δT/δt=α・δ2T/δx2
ここで、Tは、温度であり、tは、経過時間であり、xは、深さであり、αは、製品の拡散率である。
【0080】
半無限媒体において、すなわち、熱拡散の時間に対して厚さが大きい場合、この時間は、文字通り、Td=e2/4αによって提供される。式中、eは、熱流束が到達する厚さである。
【0081】
この期間の終わりで、物体を構成する薄い層の極値に到達される場合には、拡散が止まり、次の段階中に温度が均等に広げられる。熱パルスから数えられるこの均質化期間は、Th=2・Tdと推定される。
【0082】
厚紙の場合には、αは0.14mm2/sに等しい。e=100μmの場合にはTd=18msであり、したがって、Th=36msである。
【0083】
さらに、熱パルスが、表面の単一の領域に位置している場合には、その側面において極めてゆっくり拡散することを留意されたい。横拡散1mmの場合には、Td=1.8sであり、2mmの場合にはTd=7.2sである。
【0084】
したがって、熱拡散は、物体の厚さに急速に(1秒の何分の1で)拡散するが、その横拡散は、本発明者らの時間スケールでは無視できるということは可能である。同様の結論が、その拡散率が近く、厚さが少し大きい(500μmまでで、Td=400msに対応する)プラスチックに関して有効である。
【0085】
薄い厚紙に関する最終的な加熱計算
紙または厚紙の熱容量として、松の熱容量C=920kJ/m3Kが採用される。総吸収エネルギ(幅800mmの機械の場合)が、2000Wであり、コンベヤベルトが、3m/sで通過する場合には、このエネルギは、以下のように分散される、すなわち2000J/s/(3m/s×0.8m)=833J/m2である。厚さ200μmの厚紙の場合には、このエネルギ流れは、2×10−4mにわたって分散され、または、体積密度W=4165kJ/m3である。したがって、加熱は、W/C=4.5℃である。50μmの薄紙の場合には、同様の推論で18℃となる。
【0086】
したがって、これは、極めて著しい加熱であり、初心者レベルの製品ラインのカメラであっても測定することが容易である。均質な温度で保管される製品の場合には、この加熱は、加熱前に制御画像を不必要にするのに十分である場合がある。
【0087】
加熱された物体の放射による冷却
ステファンボルツマンの公式W=σ・T4は、周囲温度における物体に適用され得、加熱された物体による放射によって再度放出される流れの大きさの程度を提供する。300K(27℃)で、W=460W/m2または0.046W/cm2である。
【0088】
さらに、その温度が極めて近いその環境の物体によって受けられる放射は、この放射を広範囲に補償する。正味流れは、周囲の媒体に関する温度差ΔTに関して、300Kの周囲温度の付近で公式を微分することによって計算される。
ΔW=4×σT3ΔT=6.16×ΔT
例えば、前記で求められた最大値または最も好ましくない値は、
ΔT=18℃でそのとき、ΔW=111W/m2である。
【0089】
この推論において、次の紙の厚紙層への伝導による熱伝達は、無視される。実際には、2つの層の間に小さな空隙の存在でさえ、主要な熱伝達を下向きの放射によって行うことができ、伝導によってではない。にもかかわらず、この表面層の2つの面における冷却を考慮する必要があり、ここでは、ΔW’=222W/m2であり、m2は、加熱表面(1つの面)の面積である。
【0090】
加熱段階が約800J/m2(上記参照)で提供される場合には、熱は、放射によってただゆっくり放出される(最も薄い紙の場合には4秒より長く、厚い厚紙の場合には1分までかかる)。したがって、少なくとも2分の1秒分離れた、上述の画像化の2つのインスタンス間には、これらの物体の放射による冷却を無視することができる。
【0091】
既に上述したように、加熱手段5は、種々の実施形態において提供されることができ、それぞれ特定の利点および制限を説明する。
【0092】
物体1の制御された加熱を実行するための第1の可能性は、中間赤外線放射(MIR)を実装することにある。
【0093】
染料およびインクに関係なく、低い貫通深さおよび強力な吸収の両方を確保するために、2000nmより大きな波長の集中照明が望ましい。この範囲における吸収率は、有機製品のすべてに関して80%を上回る。
【0094】
強力な吸収というまさにその事実から、放射の貫通深さは低く(3000nmを超え、水に関して約20μmの後で90%の減衰)、表面加熱を保証する。したがって、製品の第1の層のみが、熱のフラッシュによって影響を及ぼされることを保証する。この推論はまた、薄すぎると、製品は放射のすべてを止められないということを意味すること留意されたい。厚さ10μmのプラスチックの袋は、波長を伴うエネルギの10%〜50%のみを収集する。
【0095】
本発明による照明系の形態における加熱手段5の変形の実施形態の図は、添付図面の図2において提供される。
【0096】
円筒の放射管5”を用いたそのような照明を作製することは可能である。これらの管は、インク乾燥系またはガラス溶融炉の標準的な工業構成部品である。それらのコストは中程度であり、耐用期間は年単位で計数される。830℃または1100°Kの表面温度で、放射エネルギW=8.3W/cm2が、黒体の法則に基づいて計算される。
【0097】
放射ピークの波長は、λp=2630nmである。
【0098】
この温度は、本発明者らの問題に関して適切であることが分かっている。この温度に関して、直径1cmの管の放射は、リニアメータ当たり2500Wを提供するのに十分である。
【0099】
製品が通過する軸における狭いバンド7において熱パルスを集中することは重要である。製品の循環に関する理由(350mmを上回る通過の高さ)のほか、安全性の理由(火災の危険)のために、照明は一般に、コンベヤベルトに近づけることはできない。それにもかかわらず、本発明によれば、熱流れを集中することは可能である。楕円反射体8が、管5”の周囲に配置される。焦点の1つが管自体であり、それにより他の焦点がコンベヤベルトに近づけるように構成される。したがって、反射体8を通過する任意の熱線は、領域7でコンベヤベルトに接触するように反射される。例えば、管から反射体の底部までの距離が約12cmであり、管からコンベヤベルトまでの距離が約50cmである場合には、領域7が、コンベヤベルト3によって形成される運搬平面2にわたって約5cmの幅を有する。
【0100】
さらに、選択された温度に関して、運搬平面2に向かって回転されることが意図されるその表面に層5”’を配置することによって、管5”の半分を金属被覆することが可能である。これは、金属被覆された領域における放射の本質的な部分を遮断し、熱線14が放出されないか、または極めて弱く放出される。熱は次に、反射体8のそばに位置している半空間にのみ放射する。低い方の側を金属被覆することによって、加熱の瞬時の性質を損なう任意の直接的な照明が排除され、熱線のすべてが、反射体を通過するように強制され、収率を最適化する。領域7は、放射熱のほとんどすべてを受ける。
【0101】
しかし、図2に示される実施形態は、純粋に表示のためである。
【0102】
管5”からコンベヤベルト3までの大きな距離が必要でない場合のすべてにおいて、コンベヤベルトの近く、例えば、約20cmに管を配置することが可能である。この場合には、反射体8を排除し、任意に反射および集中手段によって完成される放射の角度エリアを制限するために、金属被覆層5”’のみを用いることが可能である。この場合には、領域5”’を上部に向かって配置することが好都合であり、直接放射は下部に向かって行われる。
【0103】
添付図面の図4は、図2に示される加熱手段5に対する加熱手段5の変形実施形態を示している。
【0104】
例えば、管の形態で成形される放射源は、放射の角度拡散を制限し、運搬平面2に対向する管の面に位置付けられる反射層5”’を備える。
【0105】
拡散角のこの限定層の作用は、好都合なことに、例えば、上部反射部品および横方向の反射部品、例えば平面鏡の一部からなる反射体8によって完成させることができる。これらの手段は、熱線を集中するが、焦点を合わせないことによって、運搬平面に向かって管によって放出される熱線を向けることを可能にする。
【0106】
参照符号14’は、反射体8を用いて運搬平面の領域7に引き込まれる熱線を表す。
【0107】
物体の制御された加熱を実行するための別の可能性は、ハロゲン照明を実装することにある。
【0108】
実際に、上述の特許出願に記載されるように、楕円反射体と組み合わせられるハロゲン管によって熱パルスを作製することも可能である。これは、赤外線分光計および熱カメラに関して同一の照明を用いることを可能にし、これにより、幅3cm未満のバンド7に照明の極めて良好な集束を可能にする。
【0109】
対照的に、本方法は複数の制限がある。
半管5”を金属被覆することを可能にせず、エネルギの半分が集束されない。反射体8を通過することなく、コンベヤベルト3に達する直接熱線はまた、製品を加熱するが対応する加熱瞬間は、不十分に規定される。
製品1の吸収率は、このスペクトル範囲において100%に近いわけではない。カラーまたは白色において中程度に明るい紙の場合には、エネルギの大部分を反射または拡散する。したがって、加熱は、前値の5%〜10%のみであり、200μmの厚紙の場合には約0.25℃、50μmの紙の場合には約1℃である。
【0110】
これは次に、低解像度のカメラの検出限界に近づき、差分モード(加熱前の制御画像)が最も重要となる。しかし、この放射モードは、マルチセンサ用途における照明数を削減するのに好都合である。
【0111】
本発明の範囲内で制御された加熱を実行するための第3の可能性は、パルス化された照明または反復パルスによる照明を実現することにある。
【0112】
短い持続期間(1ms、10μsもあり得る)の反復フラッシュに基づく加熱手段が存在する。キセノンランプまたは映写機によるこれらのフラッシュを作製することが可能である、しかし、これらのフラッシュは一般的に、可視領域において動作するように最適化され、赤外線手段におけるその収率は比較的小さい。この欠点にもかかわらず、完全に規定された加熱の瞬間の利点を提供する。
【0113】
通過するときに物体1の制御された加熱を実行するための第4の具体的な可能性は、レーザ、好ましくは赤外線による照明を実現することにある。
【0114】
制御された2次元スキャナと組み合わせたレーザによる照明は、確かにさらに複雑であるが、以下に記載されるように熱源に対して複数の利点を提供する。
【0115】
第一に、それを単一の画像にもたらすことによって、差分加熱解析を簡単にすることが可能となる。レーザによって簡単に加熱される物体の特定の先端が対象である場合には、100ms〜200msの期間の終わりで加熱を評価することが可能である。上記から分かったように、この時間は、熱を物体の厚さに拡散するが、横方向の拡散はしないようにするのに十分である。したがって、加熱領域を、熱的にも平衡である隣接領域と直接的に比較することが可能である。適切である領域のサイズの大きさの程度は、側方または直径において5mm〜10mmであり、市販の平行されたレーザビームに完全に匹敵している。
【0116】
変形は、隣接するラインを加熱しない状態で残すことによって、レーザによって加熱されたラインを作製することにある。10mm〜20mmの通過に対応する取得時間が数ミリ秒である流れによって生じた熱カメラの不可避の焦点ぼけを考慮するために、このラインを、コンベヤベルトの進行方向に対して平行にすることが好都合である。
【0117】
レーザは、対象領域にエネルギを集中させることが可能であり、それによって著しくエネルギの需要を削減するほか、関連する火災の危険を削減することを可能にする。レーザが、物体に位置している可視系から下流側に配置される場合には、物体が存在する点にのみ向けられ得る。前の構成を組み合わせることによって、物体1が存在する場所である限り、コンベヤベルト3の進行に対して平行であるラインを走査することを可能にする。
【0118】
動作のこの第2の好ましい方法は、図3の図によって示される。レーザ5”は、平行ビーム、物体1に向かって垂直軸8を有する2つのミラーの組によって偏向されるビームを作製する。交互の加熱/非加熱ラインが描かれる場合には、ラインは、物体の進行方向Dに対して平行であることが好ましい。レーザは、連続的にまたはパルスモードで動作することができる。画像取得前に、既に述べたように、物体1は、距離dの通過中にそれらの温度を安定化することを可能にする。制御領域7”は、もはや必要ではない。
【0119】
この作製によって、コンベヤベルト3の任意の加熱が回避され、エネルギの要件が劇的に削減される。約20%のベルトの充填速度が仮定され、各物体の表面の50%が加熱されると、前のエネルギの10%は、等価な熱作用を得るために十分である。したがって、2000Wの代わりに200Wのエネルギで十分である。完全に現実的である各物体の表面の10%の「調査」が申し分ない場合には、40Wが十分である。厚い製品(200μm)の場合には1℃の加熱、薄い製品(50μm)の場合には4℃の加熱が、十分であると考えられる場合には、要件もまた4分の1に削減される。用途に適した最小のレーザは、10Wの出力を有する。
【0120】
最後に、レーザは、その性質から、他の利点を提供する。
その単色性によって、その吸収がレーザの波長で最大である一定の材料に特に作用することが可能である。
この表示が、赤外線分光計などの別のセンサ10によって予め提供される場合には、構成材料などの他の判断基準に基づいて、物体の加熱の時間の長さを選択することも可能である。
【0121】
以下、本発明による方法および機械の種々の用途は、物体分類の種々のタイプに関連して示される。
【0122】
本発明の第1の用途は、紙に関し、特に印刷用紙と厚紙型の包装製品との間の弁別に関する。
【0123】
この用途は、著しく拡散しかつ不透明である構造化された(繊維)製品を含む。MIR波長において、それは、極めて吸収率が高い、その放射率が高く(>0.9)で一定である。
【0124】
弁別は、近い外観の2つの印刷製品に関連するものとする。
厚さが250μm〜400μmまで変化する小さな包装用厚紙と、
雑誌および広告とであり、雑誌および広告の内部の用紙は、約40μmの厚さを有するが、そのカバーは、しばしば150μmに達することが分かる。
紙の拡散率に関して、a=0.14mm2/sが仮定される、
小さな薄い厚紙について、Th_c=e2/2a=0.252/(2×0.14)s=0.224s=224msが仮定され、
雑誌カバーについては、Th_m=0.162/(2×0.14)=92msが仮定される。
【0125】
画像が安定化後、ここでは、224ms後に取得され、これは、2つの製品の最長の均質化時間である。
【0126】
3m/sでの通過によって、移動は、2点間で約670mmからである。これは、320×240画素カメラが仮定され、その画素の画像が、ベルト上側面で4mmである場合に、同一の画像における2つの画像のバンドを有するのにまさに十分である。
【0127】
約5.6℃のMIR放射による加熱は、雑誌カバーに関して計算され、小さな厚紙の場合には3.6℃が計算される。これらの値の差は、有意であり、測定可能である。
【0128】
最後に、水分の影響を考慮することが必要である。水分は、熱容量を著しく増大させ、したがってより大きな厚さに相当する。したがって、任意の非常に濡れた紙は、厚紙と混同される傾向がある。この場合は、汚染された製品が望ましくなく、ほとんど常に濡れているため、リサイクル対象に準拠している。したがって、分類装置は、濡れた紙を処分する傾向がある。
【0129】
最後に、分離された紙片(またはコンベヤベルトの上に配置されたプラスチックフィルム)などの極めて薄い製品の場合には、コンベヤベルト自体およびそのより高い温度が、物体を通過することを示している。これは、紙として製品をさらに分類する傾向がある。したがって、その作用は、プラスチックフィルムの場合を除いて好ましい。
【0130】
本発明の第2の用途は、製品、特に多層ポリマー材料(PET)から構成される包装に関する。
【0131】
区別は、ここでは中でも無色の透明な瓶に関連付けることである。このような無色の透明な瓶は、1層のPET層または少なくとも3層の並列層のいずれかで製作され、それによって中心層は、気体(O2またはCO2)に対する障壁を形成する材料からなる。この材料は、例えば、ナイロンである。示された別の場合は、近いがさらに簡単であり、洗浄後であっても、表面の上に、ラベルまたはプラスチックのスリーブがある。この場合には、表面上のラベルの存在を特徴付けることが必要である。
【0132】
多層を加熱した後、熱は、主に第1の厚さ(表面層)を貫通する。実際には、層は、一体ではなく、第2の層に対する伝導は極めて限定される。現象は、加熱中に、光学的不連続性が、入射エネルギの一部の上向きの反射を形成するという事実によって際立っている。
【0133】
単層の瓶は、一般に、約400μmの厚さを有する。3層である場合には、中心層は薄く、約20μmであり、それぞれ約190μmの2つの層を分離する。
単層:Th_m=e2/2a=0.42/(2×0.14)s=0.571s=571ms
3層(第1の層):Th_t=0.192/(2×0.14)=129ms
である。
【0134】
したがって、2つの場合の間を弁別するために少なくとも250ms待つことが必要であり、理想的には570msであり、1500mmの移動に相当する。この最後の値は、2枚の画像を同一のカメラ6を用いて処理することを妨げる。
【0135】
これは、30℃に向かう物体の自然冷却において、通常95℃で実行される洗浄出力で動作することが可能である。3層瓶は、1層より高速で表面を冷却する。したがって、単一の画像のみが必要である。
【0136】
本発明の第3の用途は、プラスチック材料から構成される袋およびフィルムの分類に関する。
【0137】
プラスチックフィルムは、PE型ポリオレフィンまたはPP型ポリオレフィンから構成されることも最も多く、同一の材料から構成される固体物体の分光測定法によって識別することが困難である。特に、カーボンブラックの内層、特定のタイプの多層を有するPEHDは、PELDプラスチック袋に極めて近いスペクトルを有する。したがって、先の場合に関して、極めて顕著な厚さにおける差によって分類することが可能である。このタイプの分類は、PE(LDまたはHD)の存在を既に決定した赤外線分光計に加わる。熱慣性が低いため、画像取得は、PEHD瓶の全体的な安定化の前に、理想的なコントラストに関して加熱領域後に高速で行われなければならない。
【0138】
本発明の第4の用途は、堆肥の浄化に関する。
【0139】
第一に、主に有機製品の流れが、未加工の廃棄物の流れから始める選別によって得られる。一般に、80mmメッシュが、80%を超える有機材料(食品屑、台所屑、野菜屑)、すなわち水分の多い微粒子に凝縮する流れを、微粒子(通過断片)から得ることを可能にする。
【0140】
2つのタイプの汚染物に主に直面する。
軽い汚染物:プラスチックタイプ(可撓性または剛性)と、多少汚染された紙。
重い汚染物:ガラス、岩、金属、灰。
【0141】
加熱を可視化するための2つの連続画像が、再び開始される。
【0142】
当該製品は、ほとんどすべて不透明であり、したがって、狭い表面層で熱放射を容易に吸収する。
【0143】
生物学的製品は、取り込まれた水塊を覆う皮膚に似ている。これらは、かなりゆっくり拡散する(水の拡散率=0.14mm2/s)。それらの厚さは、少なくとも1mmである。水の熱容量は、すべての流体の中で最高である。したがって、これらの製品は、より低い平衡温度を有する。
【0144】
鉱物およびガラスは、水より低い熱容量を有する。しかし、これらは常に厚く(>2mm)、水の少なくとも4倍の速さで拡散する。したがって、水より急速に冷たくなり、これは、加熱段階から明らかである。
【0145】
金属は、強い反射率(90%〜95%)を有し、ほとんど加熱しない。さらに、それらの放射率は低く、所与の加熱に関して、ほとんど放射を放出しない。したがって、ほとんど黒く見える。これは、それらが熱平衡状態にある場合には、制御写真(加熱前)から真実である。
【0146】
軽い汚染物は、既に上述したように、MIR型放射に極めて敏感である。それらは、熱容量がほとんどなく、薄い。次に、軽い汚染物は、わずかに拡散し、数秒間でほとんど一定の温度を維持する。
【0147】
2つの画像間の加熱が、減少する順で示されている場合には、その結果は、
最も高温:プラスチックおよび紙、
生物学的製品、中程度に加熱、
鉱物およびガラス、わずかに加熱、
金属、ほとんど黒、これは第1の画像から得られる。
【0148】
戦略は、前例とは少し異なる。紙を安定化するために適切な時間、すなわち、約200ms〜250msが経過することを可能にする。他の製品は未だに安定化されていない。対照的に、プラスチックは、水の熱量がその温度を下げているため、含水製品より既にはるかに高温である。同様の理由から、ガラス、鉱物、および金属は、含水製品より明らかに冷たいおよび/または黒っぽい。
【0149】
次に、中間値の製品を維持することによって、極めて高温の製品および極めて低温の製品のすべてを取り出すことが決定される。このタイプの分類は、単一のセンサとして熱カメラのみを用いることができ、極めて競争力を有するようにすることが分かる。
【0150】
したがって、本発明は、種々のタイプの製品の実時間分類を行うために、放射による加熱のための素子と組み合わせたサーモグラフィカメラの用途に関する。具体的には、
第1の層の厚さに基づく紙および厚紙の弁別、
単層および多層プラスチック包装の弁別、
材料当たりの厚いプラスチック(1mmを上回る)の弁別、
堆肥を目的とした生物学的流れにおける種々の汚染物(プラスチック、紙、金属、ガラス、鉱物)の弁別である。
【0151】
前述に従って、本発明は、その厚さが20μm〜2mmの範囲に広がる、薄くて非金属の製品の場合に適する簡単な方法を提案する。
【0152】
好ましい用途において、以下の物理的現象を利用する。
単位表面積当たりの熱容量が、加熱される材料の表面層の厚さに正比例し、したがって、所与の表面放射レベルに関して、平衡における温度上昇は、この厚さに反比例する。このことから、知られている材料に関して厚さを推論することが可能となる。
熱平衡に達するために必要な時間期間は、他の熱現象(横方向の伝導、放射による冷却または対流)が無視できるほど十分に短い(500ms未満)。
厚さは、熱放射のほとんどの総吸収を少なくとも一定の波長に関して確保するほど十分である。20μm未満で、これらの条件はもはや適合されない。
【0153】
したがって、製品を異なるカテゴリに分類する目的のために、厚さによって製品を弁別することが可能である。さらに、加熱と検出との間の時間期間は、高速に通過する製品の関しても、コンパクトな機械を用いて、迅速な決定および実時間分類を可能にするほど十分に短い。
【0154】
当然のことながら、本発明は、記載され、添付図面に記載されかつ示される実施形態に限定されない。本発明の保護分野を逸脱することなく、特に種々の要素の構成の観点から、等価な技術によって置き換えることによって、改変が可能である。
【図面の簡単な説明】
【0155】
【図1】本発明による方法の実行のための本発明の第1の変形の実施形態による機械の部分斜視概略図である。
【図2】図1に示される機械の加熱手段および運搬平面の一部を示す詳細切取断面図である。
【図3】本発明による機械の第2の変形の実施形態を示す斜視概略図である。
【図4】本発明による機械の一部を形成する照明手段に関する別の変形の実施形態の図2に類似の図である。
【特許請求の範囲】
【請求項1】
非金属物体を検査しかつ分類するための自動方法であり、前記非金属物体が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、
前記自動方法が、本質的に、少なくとも1つの遠隔加熱手段(5)の熱放射に対して前記非金属物体(1)の表面または外側層(4)を一時的に晒し、通過する非金属物体(1)それぞれに、運搬平面(2)における単位表面積当たり印加される熱エネルギに関して非金属物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ(6)、例えば熱カメラによって、前記非金属物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体(1)を分類しまたはカテゴリに分け、各非金属物体に関する制御信号または作動信号を供給し、非金属物体のクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過する非金属物体(1)を分離する自動方法であって、
自動方法は、
各通過する非金属物体(1)からの1つまたは複数の熱画像のデータが、放射によって影響される表面層(4)の厚さに関して非金属物体の弁別または特徴付けを行うように処理され、それによって少なくとも通過する非金属物体(1)の前記表面層(4)の構成材料が、非金属物体のすべてに関して同一であることと、
所与の非金属物体(1)に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、一方では、前記表面層(4)において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、表面での前記非金属物体の加熱後の温度差が、表面層(4)の厚さに本質的に反比例し、一方、対照的に、横方向の熱拡散、放射による冷却、および対流の現象が、無視できるほど十分に短いこととを特徴とする、自動方法。
【請求項2】
前記通過する非金属物体(1)の弁別または特徴付けが、加熱手段(5)によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって行われる、請求項1に記載の方法。
【請求項3】
熱パルスが、各通過する非金属物体(1)の晒される表面層(4)に、その全体面または一定の領域にわたって作用する、請求項1または2に記載の方法。
【請求項4】
非金属物体(1)の弁別またはカテゴリ分けを行うための当該表面層(4)の厚さが、20μmを上回り、好都合には20μm〜2mmであり、好ましくは30μm〜1mmであり、熱放射の印加と熱画像化との間で経過する時間の長さが、1秒の数十分の1程度であり、好ましくは50ms〜600msであり、さらに好ましくは250〜400msである、請求項1から3のいずれか一項に記載の方法。
【請求項5】
自動方法が、加熱手段(5)の放射に対して晒す前に、各通過する非金属物体(1)の部分熱画像化または全体熱画像化することにもあり、それによって、前記通過する非金属物体(1)の弁別または特徴付けが、加熱手段(5)によって放出される熱放射の印加前後に取得された前記熱画像から得られる差分データに基づいて行われ、晒す前後の画像が、同一の熱センサ(6)または2つの異なるセンサによって取得される、請求項1から4のいずれか一項に記載の方法。
【請求項6】
加熱手段(5)によって放出される熱放射の印加から結果として生じる熱エネルギの蓄積が、本質的に均一であり、運搬平面(2)のレベルで晒された表面(7)全体にわたって均等に広がる、請求項1から5のいずれか一項に記載の方法。
【請求項7】
加熱手段(5)によって放出される熱放射によって行われる熱エネルギの蓄積が、本質的には断続的であり、運搬平面(2)のレベルで晒される表面(7)の局所的な領域、例えば、非金属物体が通過する方向またはコンベヤベルト(3)が移動する方向に延在するラインまたはバンドのセグメントに限定され、任意に該セグメントは、通過するときに非金属物体(1)に対応する領域において境界が定められる、請求項1から6のいずれか一項に記載の方法。
【請求項8】
各通過する非金属物体(1)の弁別または特徴付けが、表面、したがって、当該非金属物体の晒される表面層(4)の照射された領域および照射されていない領域からのデータの差の活用によって、晒された後に取得された単一の熱画像に基づいて実行される、請求項7に記載の方法。
【請求項9】
熱放射が、好ましくは赤外線型または大半が赤外線成分である集束放射であり、特に通過する非金属物体(1)の最大高さより少なくともわずかに高い運搬平面(2)の上の少なくとも最小距離に位置する印加手段(8)によって供給される、請求項1から8のいずれか一項に記載の方法。
【請求項10】
加熱手段(5)によって生成され、かつ運搬平面(2)に向かって向けられる熱放射の一部は、反射マスク(5”’)によって遮断され、前記加熱手段(5)によって放出される放射のすべてが、前記加熱手段(5)の一部を形成しかつ印加手段(8)を形成する反射集中要素によって、運搬平面(2)の晒される表面(7)に印加される、請求項9に記載の方法。
【請求項11】
自動方法が、少なくとも1つの追加センサ(10)によって、例えば、磁気検出器、分光計、および白黒またはカラー映像カメラによって形成される群から選択される追加センサ(10)によって、通過する非金属物体(1)に関連する追加データを取得することにあり、追加データの活用の結果が、1つまたは複数の熱画像に含まれるデータの活用の結果と組み合わされ、前記通過する非金属物体(1)の弁別または特徴付けを行う、請求項1から10のいずれか一項に記載の方法。
【請求項12】
非金属物体を検査しかつ分類するための自動機械であり、前記非金属物体が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、非金属物体のレベルで少なくとも1つのタイプの弁別または特徴付けを行うことを可能にし、
該自動機械(11)が、一方では、少なくとも1つの遠隔加熱手段(5)を備え、前記遠隔加熱手段(5)は、前記通過する非金属物体(1)の表面層または外側層(4)を熱放射に一時的に晒すことができ、通過する非金属物体それぞれに、運搬平面(2)における単位表面積当たり印加される熱エネルギに関して、非金属物体のすべてに対して同一である交互でない熱パルスを供給し、前記自動機械(11)が、他方では、少なくとも1つの線形またはマトリックス熱センサ(6)、例えば熱カメラを備え、前記線形またはマトリックス熱センサ(6)が、通過方向で前記少なくとも1つの遠隔加熱手段(5)から下流側に所定の距離で配置され、かつ前記非金属物体それぞれの少なくとも1つの熱画像を取得可能であり、前記自動機械(11)が、最後に、少なくとも1つの処理ユニット(12)を備え、前記処理ユニット(12)が、通過する非金属物体の1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体(1)を分類しまたはカテゴリに分けることができ、各非金属物体に関する制御信号または作動信号を供給することができ、前記少なくとも1つの処理ユニット(12)が、通過する非金属物体のカテゴリまたはクラスおよび供給される対応する制御信号または作動信号に基づいて、通過する非金属物体(1)を分離することができる少なくとも1つの手段(13)に接続され、
熱放射または各熱放射が印加される領域、すなわち加熱領域(7)を、それぞれ関連付けられる熱画像化領域または各それぞれ関連付けられる熱画像化領域(7’)が印加される領域から分離する距離(d)が、一方では、各通過する非金属物体(1)の構成材料の表面層(4)に吸収される熱エネルギが、該表面層において本質的に均質な分布を有するように十分に長く、他方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短く、
各通過する非金属物体(1)からの1つまたは複数の熱画像のデータが、前記表面層(4)の厚さに関して非金属物体の弁別または特徴付けを行うために処理され、それによって少なくとも通過する非金属物体(1)の表面層(4)の構成材料が、非金属物体のすべてに関して同一である自動機械。
【請求項13】
処理ユニット(12)が、加熱手段(5)によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって、前記通過する非金属物体(1)の弁別または特徴付けを行う、請求項12に記載の機械。
【請求項14】
運搬平面(2)を形成するコンベヤベルト(3)が、一定の変位速度を有し、前記少なくとも1つの加熱手段(5)および前記少なくとも1つの熱センサ(6)が、前記運搬平面(2)の上に配置される、請求項12または13に記載の機械。
【請求項15】
加熱手段(5)が、一方では管状焦点を有する放射源(5”)または本質的に特定の焦点または細長い焦点を有する放射源の整列と、他方では偏向素子(8)および放射集中素子(5’)との組み合わせからなり、前記加熱手段(5)を形成する2つの前記構成要素(5”および8)が、成形された延長部を有し、運搬平面(2)の幅の実質的な部分に対して交差して、好ましくは本質的には運搬平面の全体幅にわたって延在し、集束された放射を受ける運搬平面(2)のベルト形態の加熱領域(7)の全体表面にわたって本質的に均一で均質な熱エネルギの蓄積を互いに協働して実行する、請求項14に記載の機械。
【請求項16】
管状放射源(5”)は、例えば、運搬平面(2)に向かって回転される前記管(5”)の表面上の金属堆積物の形態の反射マスクまたは層(5”’)を含む放射管からなり、放出された放射の略全体が、例えば、中間赤外線領域の放射、好ましくは2000nmより長い波長を有する放射を放出する型の前記放射管(5”)と組み合わせられる偏向集中素子(8)によって、前記運搬平面(2)に向かって向けられる、請求項15に記載の機械。
【請求項17】
1つまたは複数の熱センサ(6)が、各通過する非金属物体(1)に関して、熱放射(5’)に対して前記非金属物体を晒す前後の画像化を実行し、処理ユニット(12)が、前記熱放射(5’)に晒す前後で取得される熱画像から得られた差分データに基づき、前記通過する非金属物体(1)の弁別またはカテゴリ分けを行う、請求項12から16のいずれか一項に記載の機械。
【請求項18】
加熱手段(5)が、2次元走査を有する印加装置(8)と組み合わせた、連続放出または断続放出型のレーザ光源(5”)からなり、それによって、熱エネルギの蓄積は、断続性であり、運搬平面(2)のレベルで晒された表面(7)の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト(3)が移動する方向に延在するラインまたはバンドのセグメントに限定され、任意に該セグメントは、通過するときに非金属物体(1)に対応する領域において境界が定められる、請求項12から14のいずれか一項に記載の機械。
【請求項19】
処理ユニット(12)は、晒された表面(7)の照射された領域および照射されていない領域からのデータの差の活用、したがって、当該非金属物体の表面層(4)の晒された部分によって、晒された後に取得された単一の熱画像に基づいて、各通過する非金属物体(1)の弁別または特徴付けを行う、請求項18に記載の機械。
【請求項20】
自動機械が、通過方向において加熱手段(5)から上流側に位置決めされる、運搬平面(2)における通過する非金属物体(1)の見かけ上の表面を位置決めしかつ境界を定める装置もまた備え、それによって、見かけ上の表面を位置決めかつ境界を定める装置によって取得されたデータが、走査ユニットを備えたレーザ光源(5”)/印加装置(8)の形態の前記加熱手段(5)を制御するために用いられる、請求項18および19のいずれか一項に記載の機械。
【請求項21】
自動機械が、磁気検出器、分光計、および白黒またはカラー映像カメラによって形成される群から選択される少なくとも1つの追加センサ(10)も備え、追加データの活用の結果が、前記通過する非金属物体(1)の弁別または特徴付けを行うための1つまたは複数の熱画像に含まれるデータの活用の結果と、処理ユニット(12)において組み合わせられる、請求項12から20のいずれか一項に記載の機械。
【請求項1】
非金属物体を検査しかつ分類するための自動方法であり、前記非金属物体が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、
前記自動方法が、本質的に、少なくとも1つの遠隔加熱手段(5)の熱放射に対して前記非金属物体(1)の表面または外側層(4)を一時的に晒し、通過する非金属物体(1)それぞれに、運搬平面(2)における単位表面積当たり印加される熱エネルギに関して非金属物体のすべてに対して同一である交互でない熱パルスを供給し、次に、熱パルスの印加に続いて所定の長さの時間が経過した後、少なくとも1つの線形またはマトリックス熱センサ(6)、例えば熱カメラによって、前記非金属物体それぞれの少なくとも1つの熱画像を獲得し、続いて、その1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体(1)を分類しまたはカテゴリに分け、各非金属物体に関する制御信号または作動信号を供給し、非金属物体のクラスまたはカテゴリおよび/または供給される対応する制御信号または作動信号に基づいて通過する非金属物体(1)を分離する自動方法であって、
自動方法は、
各通過する非金属物体(1)からの1つまたは複数の熱画像のデータが、放射によって影響される表面層(4)の厚さに関して非金属物体の弁別または特徴付けを行うように処理され、それによって少なくとも通過する非金属物体(1)の前記表面層(4)の構成材料が、非金属物体のすべてに関して同一であることと、
所与の非金属物体(1)に関して、加熱放射の印加と熱画像化との間で経過する時間の長さが、一方では、前記表面層(4)において吸収される熱エネルギの本質的に均質な分布で終わるのに十分であり、表面での前記非金属物体の加熱後の温度差が、表面層(4)の厚さに本質的に反比例し、一方、対照的に、横方向の熱拡散、放射による冷却、および対流の現象が、無視できるほど十分に短いこととを特徴とする、自動方法。
【請求項2】
前記通過する非金属物体(1)の弁別または特徴付けが、加熱手段(5)によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって行われる、請求項1に記載の方法。
【請求項3】
熱パルスが、各通過する非金属物体(1)の晒される表面層(4)に、その全体面または一定の領域にわたって作用する、請求項1または2に記載の方法。
【請求項4】
非金属物体(1)の弁別またはカテゴリ分けを行うための当該表面層(4)の厚さが、20μmを上回り、好都合には20μm〜2mmであり、好ましくは30μm〜1mmであり、熱放射の印加と熱画像化との間で経過する時間の長さが、1秒の数十分の1程度であり、好ましくは50ms〜600msであり、さらに好ましくは250〜400msである、請求項1から3のいずれか一項に記載の方法。
【請求項5】
自動方法が、加熱手段(5)の放射に対して晒す前に、各通過する非金属物体(1)の部分熱画像化または全体熱画像化することにもあり、それによって、前記通過する非金属物体(1)の弁別または特徴付けが、加熱手段(5)によって放出される熱放射の印加前後に取得された前記熱画像から得られる差分データに基づいて行われ、晒す前後の画像が、同一の熱センサ(6)または2つの異なるセンサによって取得される、請求項1から4のいずれか一項に記載の方法。
【請求項6】
加熱手段(5)によって放出される熱放射の印加から結果として生じる熱エネルギの蓄積が、本質的に均一であり、運搬平面(2)のレベルで晒された表面(7)全体にわたって均等に広がる、請求項1から5のいずれか一項に記載の方法。
【請求項7】
加熱手段(5)によって放出される熱放射によって行われる熱エネルギの蓄積が、本質的には断続的であり、運搬平面(2)のレベルで晒される表面(7)の局所的な領域、例えば、非金属物体が通過する方向またはコンベヤベルト(3)が移動する方向に延在するラインまたはバンドのセグメントに限定され、任意に該セグメントは、通過するときに非金属物体(1)に対応する領域において境界が定められる、請求項1から6のいずれか一項に記載の方法。
【請求項8】
各通過する非金属物体(1)の弁別または特徴付けが、表面、したがって、当該非金属物体の晒される表面層(4)の照射された領域および照射されていない領域からのデータの差の活用によって、晒された後に取得された単一の熱画像に基づいて実行される、請求項7に記載の方法。
【請求項9】
熱放射が、好ましくは赤外線型または大半が赤外線成分である集束放射であり、特に通過する非金属物体(1)の最大高さより少なくともわずかに高い運搬平面(2)の上の少なくとも最小距離に位置する印加手段(8)によって供給される、請求項1から8のいずれか一項に記載の方法。
【請求項10】
加熱手段(5)によって生成され、かつ運搬平面(2)に向かって向けられる熱放射の一部は、反射マスク(5”’)によって遮断され、前記加熱手段(5)によって放出される放射のすべてが、前記加熱手段(5)の一部を形成しかつ印加手段(8)を形成する反射集中要素によって、運搬平面(2)の晒される表面(7)に印加される、請求項9に記載の方法。
【請求項11】
自動方法が、少なくとも1つの追加センサ(10)によって、例えば、磁気検出器、分光計、および白黒またはカラー映像カメラによって形成される群から選択される追加センサ(10)によって、通過する非金属物体(1)に関連する追加データを取得することにあり、追加データの活用の結果が、1つまたは複数の熱画像に含まれるデータの活用の結果と組み合わされ、前記通過する非金属物体(1)の弁別または特徴付けを行う、請求項1から10のいずれか一項に記載の方法。
【請求項12】
非金属物体を検査しかつ分類するための自動機械であり、前記非金属物体が、少なくとも2つの異なるカテゴリに属し、かつコンベヤベルトの運搬平面上で本質的に1層の流れで通過し、非金属物体のレベルで少なくとも1つのタイプの弁別または特徴付けを行うことを可能にし、
該自動機械(11)が、一方では、少なくとも1つの遠隔加熱手段(5)を備え、前記遠隔加熱手段(5)は、前記通過する非金属物体(1)の表面層または外側層(4)を熱放射に一時的に晒すことができ、通過する非金属物体それぞれに、運搬平面(2)における単位表面積当たり印加される熱エネルギに関して、非金属物体のすべてに対して同一である交互でない熱パルスを供給し、前記自動機械(11)が、他方では、少なくとも1つの線形またはマトリックス熱センサ(6)、例えば熱カメラを備え、前記線形またはマトリックス熱センサ(6)が、通過方向で前記少なくとも1つの遠隔加熱手段(5)から下流側に所定の距離で配置され、かつ前記非金属物体それぞれの少なくとも1つの熱画像を取得可能であり、前記自動機械(11)が、最後に、少なくとも1つの処理ユニット(12)を備え、前記処理ユニット(12)が、通過する非金属物体の1つまたは複数の熱画像に含まれるデータに基づいて、各通過する非金属物体(1)を分類しまたはカテゴリに分けることができ、各非金属物体に関する制御信号または作動信号を供給することができ、前記少なくとも1つの処理ユニット(12)が、通過する非金属物体のカテゴリまたはクラスおよび供給される対応する制御信号または作動信号に基づいて、通過する非金属物体(1)を分離することができる少なくとも1つの手段(13)に接続され、
熱放射または各熱放射が印加される領域、すなわち加熱領域(7)を、それぞれ関連付けられる熱画像化領域または各それぞれ関連付けられる熱画像化領域(7’)が印加される領域から分離する距離(d)が、一方では、各通過する非金属物体(1)の構成材料の表面層(4)に吸収される熱エネルギが、該表面層において本質的に均質な分布を有するように十分に長く、他方では、横方向の熱拡散、放射による冷却、および対流の現象の作用が無視できるように十分に短く、
各通過する非金属物体(1)からの1つまたは複数の熱画像のデータが、前記表面層(4)の厚さに関して非金属物体の弁別または特徴付けを行うために処理され、それによって少なくとも通過する非金属物体(1)の表面層(4)の構成材料が、非金属物体のすべてに関して同一である自動機械。
【請求項13】
処理ユニット(12)が、加熱手段(5)によって放出される熱放射の印加前後に取得された熱画像から得られた差分データに基づいて、または熱放射の印加後に取得された単一の熱画像から得られたデータの差の活用によって、前記通過する非金属物体(1)の弁別または特徴付けを行う、請求項12に記載の機械。
【請求項14】
運搬平面(2)を形成するコンベヤベルト(3)が、一定の変位速度を有し、前記少なくとも1つの加熱手段(5)および前記少なくとも1つの熱センサ(6)が、前記運搬平面(2)の上に配置される、請求項12または13に記載の機械。
【請求項15】
加熱手段(5)が、一方では管状焦点を有する放射源(5”)または本質的に特定の焦点または細長い焦点を有する放射源の整列と、他方では偏向素子(8)および放射集中素子(5’)との組み合わせからなり、前記加熱手段(5)を形成する2つの前記構成要素(5”および8)が、成形された延長部を有し、運搬平面(2)の幅の実質的な部分に対して交差して、好ましくは本質的には運搬平面の全体幅にわたって延在し、集束された放射を受ける運搬平面(2)のベルト形態の加熱領域(7)の全体表面にわたって本質的に均一で均質な熱エネルギの蓄積を互いに協働して実行する、請求項14に記載の機械。
【請求項16】
管状放射源(5”)は、例えば、運搬平面(2)に向かって回転される前記管(5”)の表面上の金属堆積物の形態の反射マスクまたは層(5”’)を含む放射管からなり、放出された放射の略全体が、例えば、中間赤外線領域の放射、好ましくは2000nmより長い波長を有する放射を放出する型の前記放射管(5”)と組み合わせられる偏向集中素子(8)によって、前記運搬平面(2)に向かって向けられる、請求項15に記載の機械。
【請求項17】
1つまたは複数の熱センサ(6)が、各通過する非金属物体(1)に関して、熱放射(5’)に対して前記非金属物体を晒す前後の画像化を実行し、処理ユニット(12)が、前記熱放射(5’)に晒す前後で取得される熱画像から得られた差分データに基づき、前記通過する非金属物体(1)の弁別またはカテゴリ分けを行う、請求項12から16のいずれか一項に記載の機械。
【請求項18】
加熱手段(5)が、2次元走査を有する印加装置(8)と組み合わせた、連続放出または断続放出型のレーザ光源(5”)からなり、それによって、熱エネルギの蓄積は、断続性であり、運搬平面(2)のレベルで晒された表面(7)の局所的な領域、例えば、物体が通過する方向またはコンベヤベルト(3)が移動する方向に延在するラインまたはバンドのセグメントに限定され、任意に該セグメントは、通過するときに非金属物体(1)に対応する領域において境界が定められる、請求項12から14のいずれか一項に記載の機械。
【請求項19】
処理ユニット(12)は、晒された表面(7)の照射された領域および照射されていない領域からのデータの差の活用、したがって、当該非金属物体の表面層(4)の晒された部分によって、晒された後に取得された単一の熱画像に基づいて、各通過する非金属物体(1)の弁別または特徴付けを行う、請求項18に記載の機械。
【請求項20】
自動機械が、通過方向において加熱手段(5)から上流側に位置決めされる、運搬平面(2)における通過する非金属物体(1)の見かけ上の表面を位置決めしかつ境界を定める装置もまた備え、それによって、見かけ上の表面を位置決めかつ境界を定める装置によって取得されたデータが、走査ユニットを備えたレーザ光源(5”)/印加装置(8)の形態の前記加熱手段(5)を制御するために用いられる、請求項18および19のいずれか一項に記載の機械。
【請求項21】
自動機械が、磁気検出器、分光計、および白黒またはカラー映像カメラによって形成される群から選択される少なくとも1つの追加センサ(10)も備え、追加データの活用の結果が、前記通過する非金属物体(1)の弁別または特徴付けを行うための1つまたは複数の熱画像に含まれるデータの活用の結果と、処理ユニット(12)において組み合わせられる、請求項12から20のいずれか一項に記載の機械。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2009−522544(P2009−522544A)
【公表日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2008−548015(P2008−548015)
【出願日】平成18年12月28日(2006.12.28)
【国際出願番号】PCT/FR2006/002900
【国際公開番号】WO2007/077367
【国際公開日】平成19年7月12日(2007.7.12)
【出願人】(508194847)ペラン・セレクテイブ・テクノロジーズ(ソシエテ・アノニム) (1)
【Fターム(参考)】
【公表日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成18年12月28日(2006.12.28)
【国際出願番号】PCT/FR2006/002900
【国際公開番号】WO2007/077367
【国際公開日】平成19年7月12日(2007.7.12)
【出願人】(508194847)ペラン・セレクテイブ・テクノロジーズ(ソシエテ・アノニム) (1)
【Fターム(参考)】
[ Back to top ]