
原子炉振動監視装置及び原子炉振動監視方法
【課題】
本発明は、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供することにある。
【解決手段】
本発明は、一つの超音波センサから発振した超音波を、相対振動をする複数の機器に照射し、複数の機器からの反射波を処理し、前記相対振動を算出することを特徴とする。また、前記相対振動を前記各反射波の検出時間差に基づいて算出してもよい。
本発明は、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供することにある。
【解決手段】
本発明は、一つの超音波センサから発振した超音波を、相対振動をする複数の機器に照射し、複数の機器からの反射波を処理し、前記相対振動を算出することを特徴とする。また、前記相対振動を前記各反射波の検出時間差に基づいて算出してもよい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、原子炉の圧力容器内に設置されるジェットポンプをはじめとする炉内機器の振動状態を監視する原子炉振動監視装置及び原子炉振動監視方法に関する。
【背景技術】
【0002】
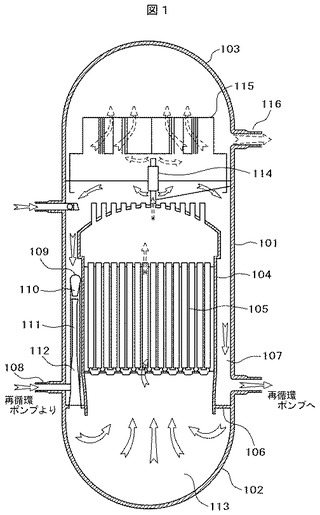
一般的な沸騰水型原子炉(BWR)の場合を例にとり、RPVの内部構造及びジェットポンプを説明する。図1は沸騰水型原子炉(BWR)用の原子炉圧力容器(RPV)101の概略断面図である。RPV101は、一般的にほぼ円筒形状を有し、一端で底部ヘッド102により、またその他端で脱着可能な上部ヘッド103により閉じられている。
【0003】
入口ノズル108はRPV101の側壁を貫通して延び、ジェットポンプ109に結合される。ジェットポンプ109を設置すると、再循環ポンプによりRPV101の外部に引き出す冷却水の量よりも多量の冷却水を炉心105へと供給することが出来る。さらに炉心105の流量を制御することで、ボイド効果(気泡の発生により冷却水の密度が減少し、原子炉の反応度が下がる効果)による反応度の変化を利用して出力を制御することが可能である。
【0004】
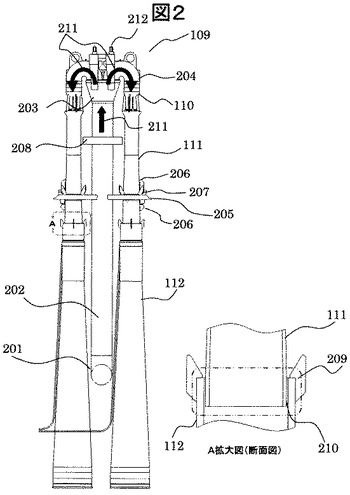
図2にジェットポンプの正面図を示し、ジェットポンプ109の構造について説明する。図2において、201はライザエルボ、202はライザ管、203はトランジションピース、204はエルボ、110はノズル、111はスロート、112はディフューザ、205はブラケット、206はサポート、207はウェッジ、208はライザーブレースである。また、スロート111とディフューザ112はスリップジョイント209で接続されており、隙間210を有する。スリップジョイント209の内外に圧力差がある場合、隙間210を通して冷却流体の流れが生じる。また、駆動流体211はライザ管202上昇後、エルボ204によっておよそ180°流れ方向が変わる。この際、エルボ204にかかる流体反力に抗するため、ジェットポンプビーム212(ビーム)が取り付けられている。
【0005】
上記のようにジェットポンプは、内部の高速流及び混合流や、スリップジョイント部の隙間210から漏洩流を有することから、流体振動の影響を受け得る機器である。ジェットポンプの長期的な健全性を確保するためには、ジェットポンプの振動状態を監視・評価する必要がある。ジェットポンプはこのように評価すべき機器の一例である。
【0006】
この振動監視方法や装置については、例えば特許文献1〜3がある。
例えば、特許文献1では、圧力容器外面に超音波センサを設置し、圧力容器や炉水を介してジェットポンプに超音波パルスを送信し、圧力容器の超音波速度、炉水の超音波速度、圧力容器の板厚、および圧力容器と炉内構造物との間の距離をもとにして、超音波の伝播時間の変化分を計測して炉内構造物の振動振幅を求める原子炉振動監視装置を開示している。
【0007】
また、特許文献2では、監視対象物の表面に超音波を反射可能な平面形状の反射面や、直交する平面を反射面として備えたコーナーリフレクタを取り付け、この反射体の反射面で反射された超音波を受信して、監視対象物の振動変位を計測する振動・劣化監視装置を開示している。
【0008】
さらに、特許文献3では、原子炉圧力容器の壁内部を反射した反射超音波パルスを特定して除外処理することにより、反射板を取り付けることなく、傾きや曲率がある内部機器の振動を検出することのできる原子炉振動監視装置を開示している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3782559号公報
【特許文献2】特許第4551920号公報
【特許文献3】特開2011−133241号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
振動による損傷は機器同士の相対振動による衝突や摩耗などの影響が大きい。しかし、一般的に他の機器との接触を伴う相対振動は、機器単体の振動よりも振幅が小さくなり、機器単体の振動計測よりも測定困難である。
【0011】
上述した従来技術は機器単体の振動を検出する技術を開示している。従来技術を用いて、複数のセンサでそれぞれの複数機器の振動を測定し、差分をとることで相対振動を算出する場合、各センサにおける超音波経路、強度、遅延材の特性等により精度の減少が懸念される。
【0012】
本発明は、前記課題を解決するためのもので、その目的は、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供することにある。
【課題を解決するための手段】
【0013】
本発明は、上記の目的を達成するために、少なくとも下記の特徴を有する。
本発明は、一つの超音波センサから発振した超音波を、相対振動をする複数の機器に照射し、複数の機器からの反射波を処理し、前記相対振動を算出することを特徴とする。
【0014】
また、前記相対振動を前記各反射波の検出時間差に基づいて算出してもよい。
さらに、前記反射波を処理し、前記反射面の振動変位を算出してもよい。
【0015】
また、前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定してもよい。
さらに、前記超音波の送信を1パルス又は連続した複数のパルスで行なってもよい。
【0016】
また、前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットが代表例である。
さらに、算出した前記相対振動の振幅を、事前の解析又は機器の製作時の評価で求めたしきい値と比較して異常の有無を判定してもよい。
【0017】
また、複数の前記機器の反射面のうち少なくとも一つの反射面に反射体を設けてもよい。
【発明の効果】
【0018】
本発明によれば、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供出来る。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係る沸騰水型原子炉内部の構造を示す断面図である。
【図2】ジェットポンプの説明図である。
【図3】本発明である原子炉振動監視装置の実施例を説明する図である。
【図4】本発明である原子炉振動監視装置の実施例における超音波の伝播経路を説明する図である。
【図5】本発明である原子炉振動監視装置の実施例における受信波形を説明する図である。
【図6】本発明である原子炉振動監視装置の実施例における超音波の収録範囲の設定と振動計測方法を示す図である。
【発明を実施するための形態】
【0020】
本発明の実施形態を沸騰水型原子炉を例に取り、図面を用いて説明する。図1は沸騰水型原子炉(BWR)用の原子炉圧力容器(RPV)101の概略断面図である。RPV101は、一般的にほぼ円筒形状を有し、一端で底部ヘッド102により、またその他端で脱着可能な上部ヘッド103により閉じられている。炉心シュラウド(シュラウド)104は一般的にRPV101内で炉心105を囲む。シュラウド104はほぼ円筒形状を有しており、シュラウド支持構造106により支持される。円筒形状のRPV101と円筒形状のシュラウド104の間には環状空間(アニュラス部)107が形成される。
【0021】
入口ノズル108はRPV101の側壁を貫通して延び、ジェットポンプ109に結合される。図示しない再循環ポンプで昇圧された冷却流体(駆動流体)はノズル110から噴射され、アニュラス部107の冷却流体(被駆動流体)を吸い込む。駆動流体と被駆動流体はスロート111内で混合され、拡散部位であるディフューザ112により静圧を回復し、下部プレナム113を通過して、炉心105へと供給される。ジェットポンプ109を設置すると、再循環ポンプ(図示せず)によりRPV101の外部に引き出す冷却水の量よりも多量の冷却水を炉心105へと供給することが出来る。さらに炉心105の流量を制御することで、ボイド効果(気泡の発生により冷却水の密度が減少し、原子炉の反応度が下がる効果)による反応度の変化を利用して出力を制御することが可能である。炉心105で発生した蒸気が、セパレータ114及びドライヤ115によって過熱蒸気となり、主蒸気ノズル116を通ってタービン(図示せず)を駆動する。一方、セパレータ114及びドライヤ115で分離された水は、アニュラス部107内において、給水系(図示せず)によって原子炉へと戻ってきた水と混合され、再びジェットポンプ109により炉心105へと供給される。
【0022】
図2にジェットポンプの正面図を示し、ジェットポンプ109の構造について説明する。図2において、201はライザエルボ、202はライザ管、203はトランジションピース、204はエルボ、110はノズル、111はスロート、112はディフューザ、205はブラケット、206はサポート、207はウェッジ、208はライザーブレースである。また、スロート205とディフューザ112はスリップジョイント209で接続されており、一般的に隙間210を有する。スリップジョイント209の内外に圧力差がある場合、隙間210を通して冷却流体の流れが生じる。また、駆動流体211はライザ管202上昇後、エルボ204によっておよそ180°流れ方向が変わる。この際、エルボ204にかかる流体反力に抗するため、ジェットポンプビーム212(ビーム)が取り付けられている。
【0023】
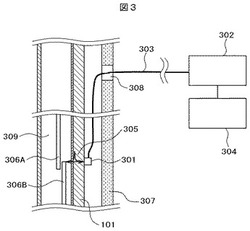
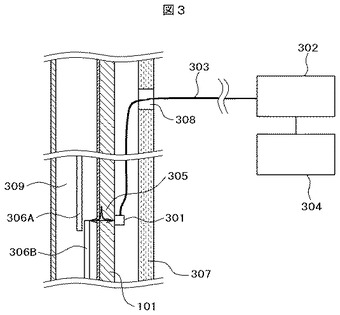
図3は、本発明の原子炉振動監視装置の実施例を説明する図である。図3が示すように、実施例は、超音波センサ301と、超音波送受信部302と、これらを結ぶ同軸線303と、超音波受信波形を収録し処理する超音波信号処理部304とから構成される。
【0024】
超音波センサ301は超音波305が複数の相対振動する原子炉内機器306A、306Bへ効率良く当たるRPV101外側表面の位置に取り付けられる。耐熱性のある超音波センサの取付け方法としては、金、銀や銅などの軟金属を挟んで圧力をかけて設置する方法や、高温接着剤、ろう付けや高温ハンダで物理的に取り付ける方法が知られており、高温でも安定して超音波を送受信できる方法であれば、いずれの技術を用いても良い。また、超音波センサ301を設置する際には、原子炉内機器306Aおよび306Bから反射される複数の超音波反射波を検出して設置位置を決めても良いし、設置時の温度条件と計測時の温度条件の違い、特に温度変化に対する媒質の音速変化や、原子炉内機器の温度変化に伴う伸縮等を考慮し、シミュレーションなどを用いて各温度条件での超音波伝播経路を事前に解析して超音波センサ301の設置位置を決定しても良い。
【0025】
超音波センサ301と超音波送受信部302を結ぶ同軸線303は、RPV101と原子炉格納容器(PCV)307との間を配線し、PCV307の配線引き出しハッチ308を通して、超音波送受信部302と連結される。この状態で、超音波センサ301から超音波305を送信し、送信された超音波305はRPV101と炉水309を介して原子炉内機器306Aおよび306Bで反射波となり、再び超音波センサ301に受信される。
【0026】
受信された超音波エコーは電気信号として超音波送受信部302で受信され、その波形が経時的に記録される。ここで、原子炉内機器306Aおよび306Bが紙面水平方向に振動していたとすると、超音波305の伝播距離が、経時的に変化することになる。超音波信号処理部304に経時的に保存された反射波(後述する図6の407A、407B)の時間位置は、前述の原子炉内機器306Aおよび306Bの振動に対応して、時間軸上で変化する(図6の602A、602B)。この2つの反射波の時間軸上での差と炉水の音速の積の1/2は原子炉内機器306Aおよび306Bの相対距離に相当することから、この時間差の変化を検出することで原子炉内機器の相対振動(後述する図6の603)を算出することが可能である。また、各反射波及び相対振動の波形(602A、602B及び603)の時間変化の振動波形を一般的に用いられている高速フーリエ変換処理(FFT)を行うことで、監視対象の振動及び相対振動の周波数スペクトルを得ることができる。以上が、本発明における振動状態監視方法の実施例と基本的な動作原理である。
【0027】
次に、上記実施例における超音波伝播経路について図4を用いて詳述する。実施例では、監視対象、即ち超音波反射面として、例えばジェットポンプ109のスロート111とディフューザ112の外表面がある。その他のジェットポンプ109内での監視対象としては、ウェッジ207とブラケット205の外表面、或いはスロート111とブラケット205の外表面などがある。
【0028】
この反射面に対して超音波センサ301(超音波素子301a)から超音波を送信すると、超音波は超音波センサ301内部の前面板401を伝播し、前面板とRPV101の音響インピーダンス(音速×密度)の差に対応した透過率でRPV101に伝播402し、音響インピーダンスに対応した反射率で前面板内に反射403する。同様にRPV101に伝播した超音波402は、炉水への透過波404とRPV内での反射波405に分かれる。ここで、RPV101から炉水への透過率は、音響インピーダンスの差が大きいため室温で約5%(300℃で3.5%)と低く、反射率は95%(300℃で96.5%)と高くなる。そのため、超音波センサ301から送信された超音波は、そのほとんどがRPV101内を多重反射することとなる。このため、この多重反射波406が残響としてノイズとなることがある。
【0029】
さらに、炉水中に伝播した超音波404は、原子炉内機器306Aおよび306Bに到達する。この実施例では、2つの反射面(原子炉内機器306Aおよび306B)が存在するため、この2つの反射面からの反射波407A、407Bは反射面間距離の2倍に対応した時間分だけ時間的に分離され、これまで説明してきた超音波伝播経路の逆の経路で超音波センサ301(超音波素子301a)に受信されることとなる。本発明の実施例では、例えば、1波分(サイン波1サイクル(サイン波単パルス))の超音波を送信したとするとRPV101内の多重反射波406はサイン波1サイクルであるのに対して、本発実施例の反射波は時間軸上でずれた2つのサイン波407A、407Bの1サイクルが得られることになり、複数の反射波を含む超音波信号の中から反射面で反射した反射波のみを弁別し、収録する波形を特定することが容易に可能となる。
【0030】
この波形の違いと波形収録範囲の決定方法について、図5と図6を用いて説明する。図5は超音波センサで超音波を送受信し、その際に収録した全波形の概要を示すものであり、従来技術の反射板の場合と本発明の実施例の場合を比較している。図5に示す従来技術の波形は、機器単体に超音波パルスを送信し、反射波を受信して当該機器単体の振動変位を計測する従来技術において、本発明の実施例のように1波分の超音波を送信した場合の全波形の概要を示したものである。また、図5に示すように、収録した全波形にはRPV101内の多重反射波406の波形501が複数存在し、また、形状エコーに伴うノイズ波形502も存在する。
【0031】
従来技術の場合には、機器単体の監視対象から反射波503を処理しているため、その反射波形は多重反射波の波形501やノイズ波形502と同じような1波分の波形となり、機器からの反射波503を特定するのは難しい。特にコーナーリフレクタなどの反射板を設けた場合、多重反射波の波形501やノイズ波形502が、機器単体から反射波形と同程度の強度で計測された際には、さらに反射波形503を特定するのは難しい。また、前述のように超音波が伝播するRPVと炉水の温度が変化するとそれぞれの音速も変化するため、この反射波形503の時間位置は時間軸上を移動し、その特定がますます難しくなる。
【0032】
これに対し、本発明の実施例における2つの反射面を用いた場合には、図5に示されるように、2つの機器の反射面から2つの反射波407A、407Bを有する反射波形407が得られることになる。この2つの反射波407A、407Bの時間間隔は、前述したように2つの反射面間の距離の2倍に相当する。また、前述したRPV101内の多重反射波形501や形状エコーに伴うノイズの波形502が独立した単パルスであるのに対し、本実施例における反射波形407は、時間軸上の間隔が一定である対パルスであり、多重反射波形501やノイズの波形502と波形そのものが異なるため、特定が容易である。さらに、温度変化に伴う媒質の音速変化によりこの2つの反射波形407の時間軸上での位置が変化しても、多重反射波やノイズ波との干渉がない限り容易に特定することが可能である。なお、形状エコーとは、機器の反射面の角部などによる反射波を示す。
【0033】
本実施例では、1波分(単パルス)の超音波を送信する例を示しているが、本発明は、1波分に限らず、2波分以上でもよい。要は、1回の超音波発振によって、2つの機器の反射面から反射波形が対波形のとなるような波数であればよい。複波数の場合でも、従来技術の反射波形は、多重反射の波形501やノイズ波形502と同じような複波数の波形となり、機器からの反射波形503を特定するのは難しい。定性的には、2つの機器の間隔が狭くなるほど、波数は少ない方が好ましい。
【0034】
図5で説明したように、2つの反射波を有する反射波形407を特定した後は、図6の上図及び中図に示すように、この2つの反射波407A及び407Bが含まれる範囲に超音波の収録範囲601を設定し、経時的に波形を収録する。この場合、監視対象が振動するとこの2つの反射波407A及び407Bのみ、即ち反射波形407のみが、時間軸上で振動に伴って左右に移動することになる。この2つの反射波407A及び407Bの経時的変化を示したのが、それぞれ図6の下図に示す602A、602Bである。
【0035】
また、相対振動は、2つの反射波の時間差(Δt)と監視対象部位の炉水の音速Vwを用いて、式(1)から2つの反射面間の距離ΔHを求め、その経時的変化を算出することで求めることができる。この相対振動の経時的変化を示したのが、図6の下図に示す603である。
ΔH(t)=Vw×Δt/2 (1)
なお、相対振動の振幅は、2つの反射面からの距離を到達時間から求め、その距離の差としても求めることができる。
【0036】
この相対振動の振幅を監視することで、反射波摩耗による板厚の減少等の異常、経年変化による振動状態の変化を測定することが可能であり、事前に解析又は機器の製作時の評価等で求めた振動しきい値と比較することで振動状態の評価を行うことも可能である。
【0037】
また、2つの機器に別々に超音波パルスを発信して振動測定し、差分をとることで相対振動を測定することも可能であるが、各センサにおける超音波経路、強度、遅延材の特性等により精度の減少が懸念される。一方、本実施例によれば、2つの反射波を1つの超音波センサで受信するため、伝達経路やセンサの違いによる精度減少を除去し、高精度の測定が可能である。
【0038】
以上の説明では、サイン波を例に説明したが、図3に示すように先が尖った形状のパルスでもよいし、方形波、三角波などでもよい。要は、1回の超音波発振によって、2つの機器の反射面から反射波形が対波形のとなるような波形であればよい。定性的には、2つの機器の間隔が狭くなるほど、先が尖った形状が好ましい。
【0039】
また、以上の説明では反射面が曲面を有する監視対象機器を対象に説明したが、反射波の検出信号は小さい場合には、反射面に反射板やコーナーリフレクタなどの反射体を用いてもよい。
【0040】
現在最も実用的であり好ましい実施形態と考えられるものに関連して本発明を説明してきたが、本発明は、それらの開示された実施形態に限定されるものではなく、逆に、添付の特許請求の範囲の精神および範囲内に含まれる様々な修正形態および等価な構成を包含するものであることを理解されたい。
【符号の説明】
【0041】
101:原子炉圧力容器(RPV) 102:底部ヘッド
103:上部ヘッド 104:炉心シュラウド
105:炉心 106:シュラウド支持構造物
107:環状空間(アニュラス部) 108:入口ノズル
109:ジェットポンプ 110:ノズル
111:スロート 112:ディフューザ
113:下部プレナム 114:セパレータ
115:ドライヤ 116:主蒸気ノズル
201:ライザエルボ 202:ライザ管
203:トランジションピース 204:エルボ
205:ブラケット 206:サポート
207:ウェッジ 208:ライザーブレース
209:スリップジョイント 210:隙間
211:駆動流体 212:ジェットポンプビーム
301:超音波センサ 301a:超音波素子
302:超音波送受信部 303:同軸線
304:超音波信号処理部 305:超音波
306A:原子炉内機器 306B:原子炉内機器
307:原子炉格納容器(PCV) 308:ハッチ
309:炉水 401:前面板
402:前面板内の伝播 403:反射
404:炉水への透過波 405:RPV内での反射波
406:RPV内の多重反射波 407:2つの機器の反射面から反射波形
407A:原子炉機器306Aからの反射波
407B:原子炉機器306Bからの反射波
501:RPV101内の多重反射波の波形
502:形状エコーに伴うノイズ波形 503:機器単体から反射波形
504:反射波形 601:収録範囲
602A:原子炉機器306Aからの反射波形の振動
602B:原子炉機器306Bからの反射波形の振動
603:原子炉機器306A、306B間の相対振動
【技術分野】
【0001】
本発明は、原子炉の圧力容器内に設置されるジェットポンプをはじめとする炉内機器の振動状態を監視する原子炉振動監視装置及び原子炉振動監視方法に関する。
【背景技術】
【0002】
一般的な沸騰水型原子炉(BWR)の場合を例にとり、RPVの内部構造及びジェットポンプを説明する。図1は沸騰水型原子炉(BWR)用の原子炉圧力容器(RPV)101の概略断面図である。RPV101は、一般的にほぼ円筒形状を有し、一端で底部ヘッド102により、またその他端で脱着可能な上部ヘッド103により閉じられている。
【0003】
入口ノズル108はRPV101の側壁を貫通して延び、ジェットポンプ109に結合される。ジェットポンプ109を設置すると、再循環ポンプによりRPV101の外部に引き出す冷却水の量よりも多量の冷却水を炉心105へと供給することが出来る。さらに炉心105の流量を制御することで、ボイド効果(気泡の発生により冷却水の密度が減少し、原子炉の反応度が下がる効果)による反応度の変化を利用して出力を制御することが可能である。
【0004】
図2にジェットポンプの正面図を示し、ジェットポンプ109の構造について説明する。図2において、201はライザエルボ、202はライザ管、203はトランジションピース、204はエルボ、110はノズル、111はスロート、112はディフューザ、205はブラケット、206はサポート、207はウェッジ、208はライザーブレースである。また、スロート111とディフューザ112はスリップジョイント209で接続されており、隙間210を有する。スリップジョイント209の内外に圧力差がある場合、隙間210を通して冷却流体の流れが生じる。また、駆動流体211はライザ管202上昇後、エルボ204によっておよそ180°流れ方向が変わる。この際、エルボ204にかかる流体反力に抗するため、ジェットポンプビーム212(ビーム)が取り付けられている。
【0005】
上記のようにジェットポンプは、内部の高速流及び混合流や、スリップジョイント部の隙間210から漏洩流を有することから、流体振動の影響を受け得る機器である。ジェットポンプの長期的な健全性を確保するためには、ジェットポンプの振動状態を監視・評価する必要がある。ジェットポンプはこのように評価すべき機器の一例である。
【0006】
この振動監視方法や装置については、例えば特許文献1〜3がある。
例えば、特許文献1では、圧力容器外面に超音波センサを設置し、圧力容器や炉水を介してジェットポンプに超音波パルスを送信し、圧力容器の超音波速度、炉水の超音波速度、圧力容器の板厚、および圧力容器と炉内構造物との間の距離をもとにして、超音波の伝播時間の変化分を計測して炉内構造物の振動振幅を求める原子炉振動監視装置を開示している。
【0007】
また、特許文献2では、監視対象物の表面に超音波を反射可能な平面形状の反射面や、直交する平面を反射面として備えたコーナーリフレクタを取り付け、この反射体の反射面で反射された超音波を受信して、監視対象物の振動変位を計測する振動・劣化監視装置を開示している。
【0008】
さらに、特許文献3では、原子炉圧力容器の壁内部を反射した反射超音波パルスを特定して除外処理することにより、反射板を取り付けることなく、傾きや曲率がある内部機器の振動を検出することのできる原子炉振動監視装置を開示している。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第3782559号公報
【特許文献2】特許第4551920号公報
【特許文献3】特開2011−133241号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
振動による損傷は機器同士の相対振動による衝突や摩耗などの影響が大きい。しかし、一般的に他の機器との接触を伴う相対振動は、機器単体の振動よりも振幅が小さくなり、機器単体の振動計測よりも測定困難である。
【0011】
上述した従来技術は機器単体の振動を検出する技術を開示している。従来技術を用いて、複数のセンサでそれぞれの複数機器の振動を測定し、差分をとることで相対振動を算出する場合、各センサにおける超音波経路、強度、遅延材の特性等により精度の減少が懸念される。
【0012】
本発明は、前記課題を解決するためのもので、その目的は、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供することにある。
【課題を解決するための手段】
【0013】
本発明は、上記の目的を達成するために、少なくとも下記の特徴を有する。
本発明は、一つの超音波センサから発振した超音波を、相対振動をする複数の機器に照射し、複数の機器からの反射波を処理し、前記相対振動を算出することを特徴とする。
【0014】
また、前記相対振動を前記各反射波の検出時間差に基づいて算出してもよい。
さらに、前記反射波を処理し、前記反射面の振動変位を算出してもよい。
【0015】
また、前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定してもよい。
さらに、前記超音波の送信を1パルス又は連続した複数のパルスで行なってもよい。
【0016】
また、前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットが代表例である。
さらに、算出した前記相対振動の振幅を、事前の解析又は機器の製作時の評価で求めたしきい値と比較して異常の有無を判定してもよい。
【0017】
また、複数の前記機器の反射面のうち少なくとも一つの反射面に反射体を設けてもよい。
【発明の効果】
【0018】
本発明によれば、原子炉圧力容器内の機器の健全性及び異常を評価するために、機器間の微小な相対振動を監視する原子炉振動監視装置及び原子炉振動監視方法を提供出来る。
【図面の簡単な説明】
【0019】
【図1】本発明の実施形態に係る沸騰水型原子炉内部の構造を示す断面図である。
【図2】ジェットポンプの説明図である。
【図3】本発明である原子炉振動監視装置の実施例を説明する図である。
【図4】本発明である原子炉振動監視装置の実施例における超音波の伝播経路を説明する図である。
【図5】本発明である原子炉振動監視装置の実施例における受信波形を説明する図である。
【図6】本発明である原子炉振動監視装置の実施例における超音波の収録範囲の設定と振動計測方法を示す図である。
【発明を実施するための形態】
【0020】
本発明の実施形態を沸騰水型原子炉を例に取り、図面を用いて説明する。図1は沸騰水型原子炉(BWR)用の原子炉圧力容器(RPV)101の概略断面図である。RPV101は、一般的にほぼ円筒形状を有し、一端で底部ヘッド102により、またその他端で脱着可能な上部ヘッド103により閉じられている。炉心シュラウド(シュラウド)104は一般的にRPV101内で炉心105を囲む。シュラウド104はほぼ円筒形状を有しており、シュラウド支持構造106により支持される。円筒形状のRPV101と円筒形状のシュラウド104の間には環状空間(アニュラス部)107が形成される。
【0021】
入口ノズル108はRPV101の側壁を貫通して延び、ジェットポンプ109に結合される。図示しない再循環ポンプで昇圧された冷却流体(駆動流体)はノズル110から噴射され、アニュラス部107の冷却流体(被駆動流体)を吸い込む。駆動流体と被駆動流体はスロート111内で混合され、拡散部位であるディフューザ112により静圧を回復し、下部プレナム113を通過して、炉心105へと供給される。ジェットポンプ109を設置すると、再循環ポンプ(図示せず)によりRPV101の外部に引き出す冷却水の量よりも多量の冷却水を炉心105へと供給することが出来る。さらに炉心105の流量を制御することで、ボイド効果(気泡の発生により冷却水の密度が減少し、原子炉の反応度が下がる効果)による反応度の変化を利用して出力を制御することが可能である。炉心105で発生した蒸気が、セパレータ114及びドライヤ115によって過熱蒸気となり、主蒸気ノズル116を通ってタービン(図示せず)を駆動する。一方、セパレータ114及びドライヤ115で分離された水は、アニュラス部107内において、給水系(図示せず)によって原子炉へと戻ってきた水と混合され、再びジェットポンプ109により炉心105へと供給される。
【0022】
図2にジェットポンプの正面図を示し、ジェットポンプ109の構造について説明する。図2において、201はライザエルボ、202はライザ管、203はトランジションピース、204はエルボ、110はノズル、111はスロート、112はディフューザ、205はブラケット、206はサポート、207はウェッジ、208はライザーブレースである。また、スロート205とディフューザ112はスリップジョイント209で接続されており、一般的に隙間210を有する。スリップジョイント209の内外に圧力差がある場合、隙間210を通して冷却流体の流れが生じる。また、駆動流体211はライザ管202上昇後、エルボ204によっておよそ180°流れ方向が変わる。この際、エルボ204にかかる流体反力に抗するため、ジェットポンプビーム212(ビーム)が取り付けられている。
【0023】
図3は、本発明の原子炉振動監視装置の実施例を説明する図である。図3が示すように、実施例は、超音波センサ301と、超音波送受信部302と、これらを結ぶ同軸線303と、超音波受信波形を収録し処理する超音波信号処理部304とから構成される。
【0024】
超音波センサ301は超音波305が複数の相対振動する原子炉内機器306A、306Bへ効率良く当たるRPV101外側表面の位置に取り付けられる。耐熱性のある超音波センサの取付け方法としては、金、銀や銅などの軟金属を挟んで圧力をかけて設置する方法や、高温接着剤、ろう付けや高温ハンダで物理的に取り付ける方法が知られており、高温でも安定して超音波を送受信できる方法であれば、いずれの技術を用いても良い。また、超音波センサ301を設置する際には、原子炉内機器306Aおよび306Bから反射される複数の超音波反射波を検出して設置位置を決めても良いし、設置時の温度条件と計測時の温度条件の違い、特に温度変化に対する媒質の音速変化や、原子炉内機器の温度変化に伴う伸縮等を考慮し、シミュレーションなどを用いて各温度条件での超音波伝播経路を事前に解析して超音波センサ301の設置位置を決定しても良い。
【0025】
超音波センサ301と超音波送受信部302を結ぶ同軸線303は、RPV101と原子炉格納容器(PCV)307との間を配線し、PCV307の配線引き出しハッチ308を通して、超音波送受信部302と連結される。この状態で、超音波センサ301から超音波305を送信し、送信された超音波305はRPV101と炉水309を介して原子炉内機器306Aおよび306Bで反射波となり、再び超音波センサ301に受信される。
【0026】
受信された超音波エコーは電気信号として超音波送受信部302で受信され、その波形が経時的に記録される。ここで、原子炉内機器306Aおよび306Bが紙面水平方向に振動していたとすると、超音波305の伝播距離が、経時的に変化することになる。超音波信号処理部304に経時的に保存された反射波(後述する図6の407A、407B)の時間位置は、前述の原子炉内機器306Aおよび306Bの振動に対応して、時間軸上で変化する(図6の602A、602B)。この2つの反射波の時間軸上での差と炉水の音速の積の1/2は原子炉内機器306Aおよび306Bの相対距離に相当することから、この時間差の変化を検出することで原子炉内機器の相対振動(後述する図6の603)を算出することが可能である。また、各反射波及び相対振動の波形(602A、602B及び603)の時間変化の振動波形を一般的に用いられている高速フーリエ変換処理(FFT)を行うことで、監視対象の振動及び相対振動の周波数スペクトルを得ることができる。以上が、本発明における振動状態監視方法の実施例と基本的な動作原理である。
【0027】
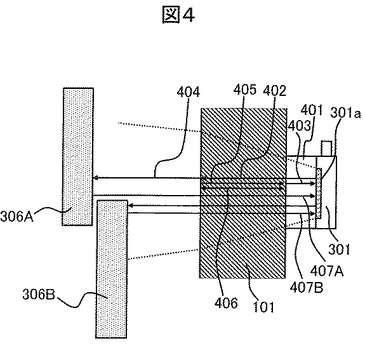
次に、上記実施例における超音波伝播経路について図4を用いて詳述する。実施例では、監視対象、即ち超音波反射面として、例えばジェットポンプ109のスロート111とディフューザ112の外表面がある。その他のジェットポンプ109内での監視対象としては、ウェッジ207とブラケット205の外表面、或いはスロート111とブラケット205の外表面などがある。
【0028】
この反射面に対して超音波センサ301(超音波素子301a)から超音波を送信すると、超音波は超音波センサ301内部の前面板401を伝播し、前面板とRPV101の音響インピーダンス(音速×密度)の差に対応した透過率でRPV101に伝播402し、音響インピーダンスに対応した反射率で前面板内に反射403する。同様にRPV101に伝播した超音波402は、炉水への透過波404とRPV内での反射波405に分かれる。ここで、RPV101から炉水への透過率は、音響インピーダンスの差が大きいため室温で約5%(300℃で3.5%)と低く、反射率は95%(300℃で96.5%)と高くなる。そのため、超音波センサ301から送信された超音波は、そのほとんどがRPV101内を多重反射することとなる。このため、この多重反射波406が残響としてノイズとなることがある。
【0029】
さらに、炉水中に伝播した超音波404は、原子炉内機器306Aおよび306Bに到達する。この実施例では、2つの反射面(原子炉内機器306Aおよび306B)が存在するため、この2つの反射面からの反射波407A、407Bは反射面間距離の2倍に対応した時間分だけ時間的に分離され、これまで説明してきた超音波伝播経路の逆の経路で超音波センサ301(超音波素子301a)に受信されることとなる。本発明の実施例では、例えば、1波分(サイン波1サイクル(サイン波単パルス))の超音波を送信したとするとRPV101内の多重反射波406はサイン波1サイクルであるのに対して、本発実施例の反射波は時間軸上でずれた2つのサイン波407A、407Bの1サイクルが得られることになり、複数の反射波を含む超音波信号の中から反射面で反射した反射波のみを弁別し、収録する波形を特定することが容易に可能となる。
【0030】
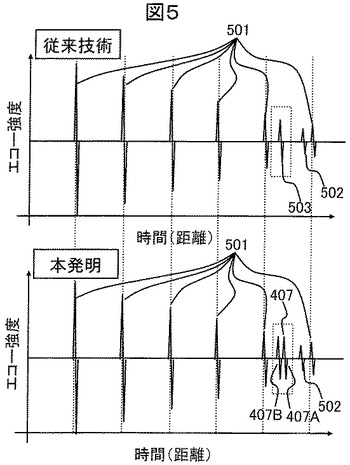
この波形の違いと波形収録範囲の決定方法について、図5と図6を用いて説明する。図5は超音波センサで超音波を送受信し、その際に収録した全波形の概要を示すものであり、従来技術の反射板の場合と本発明の実施例の場合を比較している。図5に示す従来技術の波形は、機器単体に超音波パルスを送信し、反射波を受信して当該機器単体の振動変位を計測する従来技術において、本発明の実施例のように1波分の超音波を送信した場合の全波形の概要を示したものである。また、図5に示すように、収録した全波形にはRPV101内の多重反射波406の波形501が複数存在し、また、形状エコーに伴うノイズ波形502も存在する。
【0031】
従来技術の場合には、機器単体の監視対象から反射波503を処理しているため、その反射波形は多重反射波の波形501やノイズ波形502と同じような1波分の波形となり、機器からの反射波503を特定するのは難しい。特にコーナーリフレクタなどの反射板を設けた場合、多重反射波の波形501やノイズ波形502が、機器単体から反射波形と同程度の強度で計測された際には、さらに反射波形503を特定するのは難しい。また、前述のように超音波が伝播するRPVと炉水の温度が変化するとそれぞれの音速も変化するため、この反射波形503の時間位置は時間軸上を移動し、その特定がますます難しくなる。
【0032】
これに対し、本発明の実施例における2つの反射面を用いた場合には、図5に示されるように、2つの機器の反射面から2つの反射波407A、407Bを有する反射波形407が得られることになる。この2つの反射波407A、407Bの時間間隔は、前述したように2つの反射面間の距離の2倍に相当する。また、前述したRPV101内の多重反射波形501や形状エコーに伴うノイズの波形502が独立した単パルスであるのに対し、本実施例における反射波形407は、時間軸上の間隔が一定である対パルスであり、多重反射波形501やノイズの波形502と波形そのものが異なるため、特定が容易である。さらに、温度変化に伴う媒質の音速変化によりこの2つの反射波形407の時間軸上での位置が変化しても、多重反射波やノイズ波との干渉がない限り容易に特定することが可能である。なお、形状エコーとは、機器の反射面の角部などによる反射波を示す。
【0033】
本実施例では、1波分(単パルス)の超音波を送信する例を示しているが、本発明は、1波分に限らず、2波分以上でもよい。要は、1回の超音波発振によって、2つの機器の反射面から反射波形が対波形のとなるような波数であればよい。複波数の場合でも、従来技術の反射波形は、多重反射の波形501やノイズ波形502と同じような複波数の波形となり、機器からの反射波形503を特定するのは難しい。定性的には、2つの機器の間隔が狭くなるほど、波数は少ない方が好ましい。
【0034】
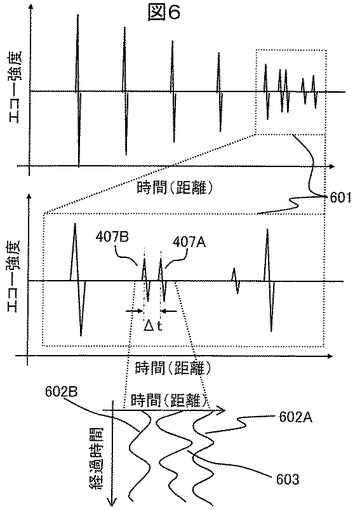
図5で説明したように、2つの反射波を有する反射波形407を特定した後は、図6の上図及び中図に示すように、この2つの反射波407A及び407Bが含まれる範囲に超音波の収録範囲601を設定し、経時的に波形を収録する。この場合、監視対象が振動するとこの2つの反射波407A及び407Bのみ、即ち反射波形407のみが、時間軸上で振動に伴って左右に移動することになる。この2つの反射波407A及び407Bの経時的変化を示したのが、それぞれ図6の下図に示す602A、602Bである。
【0035】
また、相対振動は、2つの反射波の時間差(Δt)と監視対象部位の炉水の音速Vwを用いて、式(1)から2つの反射面間の距離ΔHを求め、その経時的変化を算出することで求めることができる。この相対振動の経時的変化を示したのが、図6の下図に示す603である。
ΔH(t)=Vw×Δt/2 (1)
なお、相対振動の振幅は、2つの反射面からの距離を到達時間から求め、その距離の差としても求めることができる。
【0036】
この相対振動の振幅を監視することで、反射波摩耗による板厚の減少等の異常、経年変化による振動状態の変化を測定することが可能であり、事前に解析又は機器の製作時の評価等で求めた振動しきい値と比較することで振動状態の評価を行うことも可能である。
【0037】
また、2つの機器に別々に超音波パルスを発信して振動測定し、差分をとることで相対振動を測定することも可能であるが、各センサにおける超音波経路、強度、遅延材の特性等により精度の減少が懸念される。一方、本実施例によれば、2つの反射波を1つの超音波センサで受信するため、伝達経路やセンサの違いによる精度減少を除去し、高精度の測定が可能である。
【0038】
以上の説明では、サイン波を例に説明したが、図3に示すように先が尖った形状のパルスでもよいし、方形波、三角波などでもよい。要は、1回の超音波発振によって、2つの機器の反射面から反射波形が対波形のとなるような波形であればよい。定性的には、2つの機器の間隔が狭くなるほど、先が尖った形状が好ましい。
【0039】
また、以上の説明では反射面が曲面を有する監視対象機器を対象に説明したが、反射波の検出信号は小さい場合には、反射面に反射板やコーナーリフレクタなどの反射体を用いてもよい。
【0040】
現在最も実用的であり好ましい実施形態と考えられるものに関連して本発明を説明してきたが、本発明は、それらの開示された実施形態に限定されるものではなく、逆に、添付の特許請求の範囲の精神および範囲内に含まれる様々な修正形態および等価な構成を包含するものであることを理解されたい。
【符号の説明】
【0041】
101:原子炉圧力容器(RPV) 102:底部ヘッド
103:上部ヘッド 104:炉心シュラウド
105:炉心 106:シュラウド支持構造物
107:環状空間(アニュラス部) 108:入口ノズル
109:ジェットポンプ 110:ノズル
111:スロート 112:ディフューザ
113:下部プレナム 114:セパレータ
115:ドライヤ 116:主蒸気ノズル
201:ライザエルボ 202:ライザ管
203:トランジションピース 204:エルボ
205:ブラケット 206:サポート
207:ウェッジ 208:ライザーブレース
209:スリップジョイント 210:隙間
211:駆動流体 212:ジェットポンプビーム
301:超音波センサ 301a:超音波素子
302:超音波送受信部 303:同軸線
304:超音波信号処理部 305:超音波
306A:原子炉内機器 306B:原子炉内機器
307:原子炉格納容器(PCV) 308:ハッチ
309:炉水 401:前面板
402:前面板内の伝播 403:反射
404:炉水への透過波 405:RPV内での反射波
406:RPV内の多重反射波 407:2つの機器の反射面から反射波形
407A:原子炉機器306Aからの反射波
407B:原子炉機器306Bからの反射波
501:RPV101内の多重反射波の波形
502:形状エコーに伴うノイズ波形 503:機器単体から反射波形
504:反射波形 601:収録範囲
602A:原子炉機器306Aからの反射波形の振動
602B:原子炉機器306Bからの反射波形の振動
603:原子炉機器306A、306B間の相対振動
【特許請求の範囲】
【請求項1】
原子炉圧力容器の外側表面に設けられ、超音波を送信し且つその反射波を受信する一つの超音波センサと、
前記原子炉圧力容器内の相対振動する複数の機器に同時に行う前記送信と、前記送信に対する複数の前記機器の反射面からの各反射波の前記受信と、を制御する超音波送受信部と、
前記反射波を処理し、複数の前記機器の反射面間の相対振動を算出する超音波信号処理部と、
を有することを特徴とする原子炉振動監視装置。
【請求項2】
請求項1において、
前記超音波信号処理部は、前記相対振動を前記各反射波の検出時間差から前記反射面間の距離を求め算出することを特徴とする原子炉振動監視装置。
【請求項3】
請求項1において、
前記超音波信号処理部は、前記反射面の振動変位を算出することを特徴とする原子炉振動監視装置。
【請求項4】
請求項1において、
前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定することを特徴とする原子炉振動監視装置。
【請求項5】
請求項1において、
前記超音波信号処理部は、前記超音波の送信を1パルス又は連続した複数のパルスで行なうことを特徴とする原子炉振動監視装置。
【請求項6】
請求項1において、
複数の前記機器の反射面のうち少なくとも一つの反射面に反射体を設けたことを特徴とする原子炉振動監視装置。
【請求項7】
請求項1において、
前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットであることを特徴とする原子炉振動監視装置。
【請求項8】
原子炉圧力容器の外側表面から、前記原子炉圧力容器内の相対振動する複数の機器に同時に超音波を送信する送信ステップと、
前記送信に対する複数の前記機器の反射面からの各反射波を受信する受信ステップと、
前記反射波を処理し、複数の前記機器の相対振動を算出する相対振動算出ステップと、
を有すること特徴とする原子炉振動監視方法。
【請求項9】
請求項8において、
前記相対振動算出ステップは、前記相対振動を前記各反射波の検出時間差に基づいて算出することを特徴とする原子炉振動監視方法。
【請求項10】
請求項8において、
前記反射波を処理し、前記反射面の振動変位を算出する振動変位算出ステップを有することを特徴とする原子炉振動監視方法。
【請求項11】
請求項8において、
前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定することを特徴とする原子炉振動監視方法。
【請求項12】
請求項8において、
前記送信ステップは、前記超音波の送信を1パルス又は連続した複数のパルスで行なう
ことを特徴とする原子炉振動監視方法。
【請求項13】
請求項8において、
前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットであることを特徴とする原子炉振動監視方法。
【請求項14】
請求項10において、
算出した前記相対振動の振幅を、事前の解析又機器の製作時の評価で求めたしきい値と比較して異常の有無を判定することを特徴とする原子炉振動監視方法。
【請求項1】
原子炉圧力容器の外側表面に設けられ、超音波を送信し且つその反射波を受信する一つの超音波センサと、
前記原子炉圧力容器内の相対振動する複数の機器に同時に行う前記送信と、前記送信に対する複数の前記機器の反射面からの各反射波の前記受信と、を制御する超音波送受信部と、
前記反射波を処理し、複数の前記機器の反射面間の相対振動を算出する超音波信号処理部と、
を有することを特徴とする原子炉振動監視装置。
【請求項2】
請求項1において、
前記超音波信号処理部は、前記相対振動を前記各反射波の検出時間差から前記反射面間の距離を求め算出することを特徴とする原子炉振動監視装置。
【請求項3】
請求項1において、
前記超音波信号処理部は、前記反射面の振動変位を算出することを特徴とする原子炉振動監視装置。
【請求項4】
請求項1において、
前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定することを特徴とする原子炉振動監視装置。
【請求項5】
請求項1において、
前記超音波信号処理部は、前記超音波の送信を1パルス又は連続した複数のパルスで行なうことを特徴とする原子炉振動監視装置。
【請求項6】
請求項1において、
複数の前記機器の反射面のうち少なくとも一つの反射面に反射体を設けたことを特徴とする原子炉振動監視装置。
【請求項7】
請求項1において、
前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットであることを特徴とする原子炉振動監視装置。
【請求項8】
原子炉圧力容器の外側表面から、前記原子炉圧力容器内の相対振動する複数の機器に同時に超音波を送信する送信ステップと、
前記送信に対する複数の前記機器の反射面からの各反射波を受信する受信ステップと、
前記反射波を処理し、複数の前記機器の相対振動を算出する相対振動算出ステップと、
を有すること特徴とする原子炉振動監視方法。
【請求項9】
請求項8において、
前記相対振動算出ステップは、前記相対振動を前記各反射波の検出時間差に基づいて算出することを特徴とする原子炉振動監視方法。
【請求項10】
請求項8において、
前記反射波を処理し、前記反射面の振動変位を算出する振動変位算出ステップを有することを特徴とする原子炉振動監視方法。
【請求項11】
請求項8において、
前記各反射波で形成される反射波形に基づいて、前記反射波形の収録時間の範囲を決定することを特徴とする原子炉振動監視方法。
【請求項12】
請求項8において、
前記送信ステップは、前記超音波の送信を1パルス又は連続した複数のパルスで行なう
ことを特徴とする原子炉振動監視方法。
【請求項13】
請求項8において、
前記相対振動する複数の機器は、ジェットポンプのスロートとディフューザ、又はジェットポンプのウェッジとブラケット、或いはジェットポンプのスロートとブラケットであることを特徴とする原子炉振動監視方法。
【請求項14】
請求項10において、
算出した前記相対振動の振幅を、事前の解析又機器の製作時の評価で求めたしきい値と比較して異常の有無を判定することを特徴とする原子炉振動監視方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−113646(P2013−113646A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258464(P2011−258464)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(507250427)日立GEニュークリア・エナジー株式会社 (858)
【Fターム(参考)】
[ Back to top ]