
原子間力顕微鏡の自動調節
【課題】従来のPIベースAFMコントローラ又はPIDベースAFMコントローラよりも精巧なAFMコントローラを設計するための自動方法を提供する。
【解決手段】原子間力顕微鏡(AFM)100が、物理システムと、複数のデジタルフィルタを備え、物理システムを制御するように構成されたコントローラ135とを備える。AFM100は、物理システムの周波数応答及びコントローラ135の周波数応答によって規定されるループ応答に対して自動ループ整形を実施し、ループ応答の大きさのピークに従ってコントローラ135の利得を調整することによって調節される。
【解決手段】原子間力顕微鏡(AFM)100が、物理システムと、複数のデジタルフィルタを備え、物理システムを制御するように構成されたコントローラ135とを備える。AFM100は、物理システムの周波数応答及びコントローラ135の周波数応答によって規定されるループ応答に対して自動ループ整形を実施し、ループ応答の大きさのピークに従ってコントローラ135の利得を調整することによって調節される。
【発明の詳細な説明】
【背景技術】
【0001】
原子間力顕微鏡(AFM)は、試料の表面にわたって機械式プローブ先端を走査することによって画像を採取する。プローブ先端は、該プローブ先端と試料との間の分子力又は摩擦を検知する。この検知は、様々なAFMモードに従って様々な方法で実施することができる。例えば、コンタクトモードでは、プローブ先端は、該プローブ先端と試料との間の力に応答して偏向するカンチレバー上に搭載される。この偏向は、検出される力を、試料の表面特徴部を表すものに変換するために測定される。
【0002】
プローブ先端は、試料にわたって走査されるため、表面トポロジを正確に追跡するために高さ調整を必要とする場合がある。一般に、プローブ先端は、正確な検知のために表面に十分近く維持されるべきであるが、先端と試料との間の力がプローブ先端及び試料に損傷を与えるのに十分大きくなるほど近く維持されるべきではない。
【0003】
プローブ先端の高さは、フィードバックループを有するコントローラによって調整される。コントローラは、プローブ先端を所望の量だけ上下に移動させるための制御信号をアクチュエータに出力し、制御信号に対する任意の必要な調整を決定するためのフィードバック信号を、フィードバックループを通して受信する。制御信号とフィードバックループとの間に位置するコンポーネントは、総称的にAFMの物理システムと呼ばれる。フィードバック信号は、例えば、プローブ先端の所望の移動とプローブ先端の実際の移動との間の差を示すことができる。フィードバック信号はまた、プローブ先端と試料との間の相互作用を示すことができる。
【0004】
表面を安全に撮像するために、コントローラは、プローブ先端が試料表面に沿って走査されるときに、適時に正確な方法でプローブ先端の高さを調整することができなければならない。そうでなければ、プローブ先端は、コントローラが、必要な調整を行うことができる前に、サンプル表面にぶつかる場合がある。その結果、プローブ先端の安全な走査速度は、コントローラフィードバックループの帯域幅によって制限される。
【0005】
多くの市販のAFMコントローラでは、フィードバックループは、制御信号を更新するために、比例−積分(PI:proportional-integral)フィルタ又は比例−積分−微分(PID:proportional-integral derivative)フィルタを使用する。しかし、これらのフィルタが単純であるため、フィードバックループは、プローブ先端の高さに影響を及ぼす可能性がある高次振動共鳴を補正することができない。このように、高次共鳴を補正することができないことは、プローブ先端が、安定した動作を提供するためによりゆっくりした速度で移動されなければならないことを意味する。さらに、ほとんどのAFMは、ユーザが、フィードバックループのパラメータを調節することを必要とするが、ほとんどのユーザは、高次共鳴を補正するのに必要とされるパラメータを適切に構成することができない。
【0006】
学究的な制御理論家は、AFMのフィードバック帯域幅を増加させるために、より精巧なAFMコントローラを設計してきたが、これらのAFMコントローラは、重大な弱点も有する。これらのAFMコントローラは、通常、システム同定と呼ばれるプロセスにおいてAFMシステムの解析モデルを構築し、その後、モデル化されたAFMシステムに関する或る設計目標を満たすAFMコントローラ用の公式を生成することによって設計される。例えば、AFMシステムの解析モデルは、AFMシステムの周波数応答を測定し、その後、被測定システムの複素数値の極及びゼロの全てを捕捉する式を生成することによって構築することができる。AFMコントローラ用の公式は、その後、AFMシステムの式に基づいて生成することができる。
【0007】
学究的に設計されたAFMコントローラの1つの弱点は、システム同定が不正確であるため、システム同定がAFMシステムの欠陥のある解析モデルを生成することである。これは、実際には十分に動作しない理論的に最適なコントローラをもたらす可能性がある。学究的に設計されたAFMコントローラの別の弱点は、システム同定を行うツール及びその後のコントローラ設計を行うツールが、多くの(おそらくは弱く減衰した(weakly damped))極及びゼロを有するとともに時間遅延を有するシステムに対して機能しなくなる傾向があることである。これは、AFMの場合、一般的である。
【0008】
市販され学究的に設計されたAFMコントローラの上記欠点のため、ほとんどの既存のAFMコントローラは、多大な人間の相互作用及び検証によって設計される。換言すれば、精巧でかつ安定したAFMコントローラを作成するための自動方法は存在しない。
【発明の概要】
【発明が解決しようとする課題】
【0009】
したがって、必要とされるものは、従来のPIベースAFMコントローラ又はPIDベースAFMコントローラよりも精巧なAFMコントローラを設計するための自動方法である。
【課題を解決するための手段】
【0010】
一例示的な実施の形態によれば、物理システムと該物理システムを制御するように構成されたコントローラとを備えるAFMを調節する方法が提供される。該方法は、前記物理システムの周波数応答及び前記コントローラの周波数応答に基づいて前記AFMのループ応答を求めることと、前記ループ応答とターゲット応答特性との間の差を示すコスト関数を求めることと、前記差を減少させるように、前記コントローラの前記周波数応答を調整することとを含む。
【0011】
別の例示的な実施の形態によれば、物理システムと該物理システムを制御するように構成されたコントローラとを備えるAFMを調節する方法が提供される。該方法は、フィルタ係数の組(set)に基づいて前記コントローラの周波数応答を求めるステップと、前記コントローラの前記求められた周波数応答及び前記物理システムの測定された周波数応答に基づいて前記コントローラ及び前記物理システムのループ応答を求めるステップと、前記求められたループ応答の大きさを、所望のループ形状に揃えるステップと、前記求められたループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数の値を求めるステップと、前記誤差関数の値を改善するように前記フィルタ係数の前記組を調整するステップとを含む。
【0012】
別の例示的な実施の形態によれば、物理システムと、複数のデジタルフィルタを備え、前記物理システムを制御するように構成されたコントローラとを備えるAFMを調節するシステムが提供される。該システムは、前記物理システムの周波数応答及び前記コントローラの周波数応答によって規定されるループ応答に対して自動ループ整形を実施するループ整形コンポーネントと、前記ループ応答の極大の大きさに従って前記コントローラの利得を調整する利得調整コンポーネントとを備える。
【0013】
説明される実施形態は、添付図面とともに読まれると、以下の詳細な説明から最も良く理解される。適用可能でありかつ実用的である場合はいつも、同様な参照符号は同様な要素を指す。
【図面の簡単な説明】
【0014】
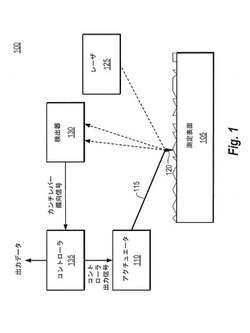
【図1】代表的な実施形態によるAFMのブロック図である。
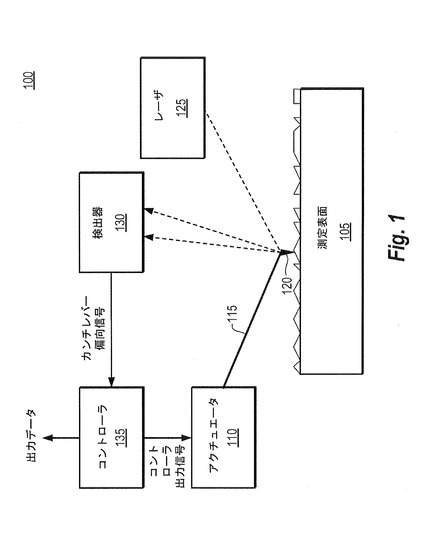
【図2】代表的な実施形態による図1のAFMの簡略化したブロック図である。
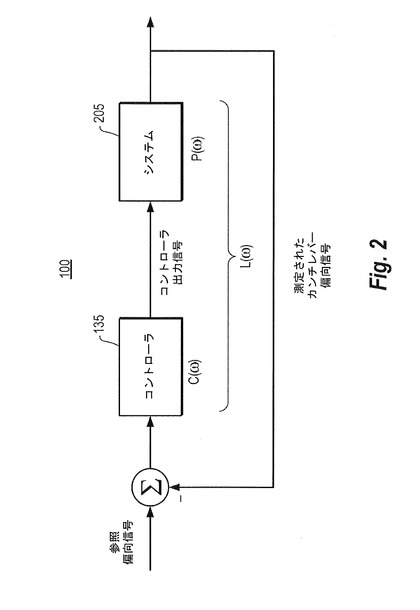
【図3】代表的な実施形態による図1のAFM内のAFMコントローラのブロック図である。
【図4】代表的な実施形態によるAFMコントローラを調節する方法を示すフローチャートである。
【図5】代表的な実施形態による図4の方法のAFMのループ応答を整形する方法を示すフローチャートである。
【図6】代表的な実施形態による図5の方法の変形形態を示すフローチャートである。
【図7】代表的な実施形態による図5及び図6の方法のフィルタ係数を初期化する方法を示すフローチャートである。
【図8】代表的な実施形態による図5〜図7の方法に関連する種々のAFM特性を示すグラフである。
【図9】代表的な実施形態による、調節された複数の4次フィルタがコントローラに追加されているAFMのループ応答を示すグラフである。
【発明を実施するための形態】
【0015】
以下の詳細な説明では、限定ではなく説明のために、特定の詳細を開示する代表的な実施形態が、本教示の完全な理解を提供するために説明される。しかし、本明細書で開示される特定の詳細から逸脱する本教示による他の実施形態が、添付の特許請求の範囲の範囲内に留まることが本開示の利益を受ける当業者に明らかであろう。さらに、よく知られている装置及び方法の説明は、例示的な実施形態の説明を不明瞭にしないために省略される場合がある。こうした方法及び装置は、明らかに本教示の範囲内にある。
【0016】
本明細書で使用される用語は、特定の実施形態を説明するためだけのものであり、制限的であることを意図するものではない。規定される用語は、規定される用語の技術的意味及び科学的意味に加えて、本教示の技術分野で一般に理解され受容されるものである。明細書及び添付の特許請求の範囲で使用されるように、数量を特定していないものは、文脈が別途明確に指示しない限り、単数の指示対象と複数の指示対象の両方を含む。そのため、例えば、「デバイス」は、1つのデバイス及び複数のデバイスを含む。
【0017】
説明する実施形態は、一般に、物理システム及び該物理システムを制御するコントローラを備えるAFMを調節する方法に関する。或る実施形態では、AFMは、物理システムの周波数応答P(ω)を測定し、次に、物理システム及びコントローラの合成周波数応答が、或る設計目標を満たすように、コントローラの周波数応答C(ω)を調整することによって調節される。ループ応答とも呼ばれる、合成周波数応答は、L(ω)=P(ω)C(ω)として規定される。設計目標は、例えば、AFMを安定に維持しながら、物理システム内の高次共鳴に対処するためにループ応答L(ω)の帯域幅を最大にすることとすることができる。
【0018】
所望の帯域幅及び安定性を達成する1つの方法は、最初に、ループ応答の大きさ|L(ω)|が所望のループ形状の大きさ|L0(ω)|に一致するように、コントローラ応答を調節し、次に、ループ応答L(ω)の帯域幅を更に改善するためにコントローラの利得を調整することである。ループ形状は、その総合利得と無関係に応答曲線の相対的構造として規定される。例えば、積分器形状は、|L(ω)|=k/ωによって与えられる。
【0019】
コントローラは、通常、カスケード構成で配列されたデジタルフィルタの組(set)を備え、C(ω)は、フィルタの係数によって決まる。したがって、L(ω)は、最初に、P(ω)を測定し、次に、フィルタ係数に基づいてC(ω)を計算することによって計算することができる。測定されたP(ω)の例は、図8のaの曲線805によって示され、計算されたC(ω)の例は、図8のaの曲線810によって示される。C(ω)の計算は、AFMの実際のデジタルサンプルレート及びフィルタ用の離散的時間表現を使用して実行することができる。その後、L(ω)が、コントローラ係数の任意の組について全ての周波数で正確に予測することができる。予測されるループ応答L(ω)の例は、図8のbの曲線815によって示され、所望のループ応答L0(ω)の例は、図8のbの曲線820によって示される。
【0020】
L(ω)を計算することができることによって、AFMコントローラのフィルタ係数は、|L(ω)|と|L0(ω)|との差に関連する(related to)或るコスト関数εを最小にするように数値的に最適化することができる。コスト関数の1つの例は、ε=rms[δ(ω)]であり、ここで、rms[δ(ω)]は、差関数δ(ω)=20log10(|L(ω)|/|L0(ω)|)の、差の2乗平均平方根又は差の2乗和である。差関数の例は、図8のcの曲線825によって示される。
【0021】
差関数δ(ω)は、これらの関数が何桁にもわたるため、通常、L(ω)及びL0(ω)の対数値について計算される。曲線当てはめ(curve fitting)において対数スケーリングを使用するとともに、曲線適合のために大きさ応答を使用する例は、Sidman他、「Parametric System Identification on Logarithmic Frequency Response Data」、IEEE TRANSACTIONS ON AUTOMATIC CONTROL,VOL.36,NO.9,SEPTEMBER 1991に記載され、その主題が、引用することにより、本明細書の一部をなすものとする。一般に、対数スケーリングの使用は、P(ω)が対数的に離間した周波数で測定されながら、εが、何ディケイドもの周波数にわたって均等に重み付けされることを可能にする。結果として、コントローラ最適化は、ωの測定された値で評価されたlog10(L0(ω))に対するlog10(L(ω))の標準的なマルチパラメータフィットによって実施することができる。
【0022】
δ(ω)を計算した後、フィルタは、図8のcの曲線830によって示すように、差関数に当てはめることができる。当てはめられたフィルタは、その後、反転され、図8のdの曲線840によって示すようにコントローラに追加することができる。本明細書で用いられるとき、用語「追加する(append)」は、更なるフィルタ応答特性を反映するためのコントローラの修正を幅広く指すことができる。こうした修正は、例えばコントローラの周波数応答を規定する構成可能なハードウェア又はソフトウェアを修正することによって行うことができる。
【0023】
ループ応答を整形する際に、L(ω)の位相は、大きさ及び位相が関連するため、時々、無視される場合がある。よく知られているボード利得−位相関係は、安定した最小位相システム(複素平面の不安定部分に極もゼロもないシステム)について、位相及び利得が一意に関連していることを示す。そのため、|L(ω)|を整形することは、相応して、L(ω)の位相のこの部分を整形する。複素平面の不安定部分内で極及び/又はゼロが存在する結果、負位相が過剰になり、時間遅延も同様である。時間遅延によるこの余分の負位相は、|L(ω)|が適切に整形された後でも、コントローラの帯域幅に制限を課す。
【0024】
大きさが整形された後、コントローラの総合利得は、或る設計目標及び/又は所与の頑健性マージンを達成するように調整される。利得を調整する際に、大きさ及び位相を含む全ループ応答L(ω)が考慮される。例えば、総合利得は、位相及び利得のマージンに対する要件に従って、最大化され、コントローラが安定かつ頑健であることを保証することができる。代替的には、利得は、所望のクロスオーバ周波数又は閉ループ帯域幅を達成するようにその最大値未満に調節することができる。
【0025】
従来の方法と違って、上記方法は、コントローラを自動的に調節することによって高次共鳴に対処するために使用することができる。これによって、ユーザの介入又は専門家の解析の必要性をなくすことができ、また、より精巧なAFMシステムが使用されることを可能にすることができる。
【0026】
図1は、代表的な実施形態によるAFM100のブロック図である。この実施形態は、説明する方法を実施することができる1つのタイプのAFMを示し、当業者は、説明する方法を他のタイプのAFMで実施することができることを認識するであろう。さらに、或る実施形態が、コンタクトモードで動作するAFMに関して説明されるが、説明する実施形態は、当業者に明らかであるように、他のAFMモードとともに使用するように適合することができる。
【0027】
図1を参照すると、AFM100は、アクチュエータ110、レーザ125、検出器130、及びコントローラ135を備える。アクチュエータ110は、プローブ先端120を有するカンチレバーアーム115に接続されている。これらは、測定表面105の画像を採取するために使用される。画像は、測定表面105に対してプローブ先端120を移動させ、プローブ先端120と測定表面105との間の力又は相互作用に起因するカンチレバーアーム115の偏向を検出することによって採取される。
【0028】
画像採取中、アクチュエータ110は、プローブ先端120と測定表面105との間に実質的に一定の力を維持するために、測定表面105に対してカンチレバーアーム115及びプローブ先端120を上下に移動させる。幾つかの実施形態では、アクチュエータ110は、例えば、その主題が、引用することにより、本明細書の一部をなすものとする、2010年9月27日に出願された、D. Schroeder他による「Tandem Piezoelectric Actuator and Single Drive Circuit for Atomic Force Microscopy」という名称の、同一出願人が所有する米国特許出願第12/890,894号に記載されているような圧電アクチュエータとすることができる。代替的には、アクチュエータ110は、例えば、その開示が、引用することにより、本明細書の一部をなすものとする、1999年11月16日付けの、S. Hoen他による「Electrostatic Actuator with Spatially Alternating Voltage Patterns」という名称の、同一出願人が所有する米国特許第5,986,381号に記載されているような静電「ナノステッパ(nanostepper)」アクチュエータとすることができる。
【0029】
レーザ125(又は別の適した光源)は、測定表面105上に配置される。レーザ125は、光を方向付け、光は、カンチレバーアーム115において反射され、検出器130に入射する。検出器130は、プローブ先端120においてカンチレバーアーム115から光が反射される角度によって決まる偏向信号を生成し、偏向信号をアナログ/デジタル変換器(ADC)に転送する。ADCは、偏向信号をデジタル化して、カンチレバー偏向信号を生成し、カンチレバー偏向信号はコントローラ135に送信される。偏向信号は、測定表面105に対してZ方向へのプローブ先端120の移動を示す。偏向信号に応答して、コントローラ135は、デジタル/アナログ変換器(DAC)を介してアクチュエータ110にコントローラ出力信号を生成して、偏向設定点に等しい一定偏向を維持するように、カンチレバーアーム115及びプローブ先端120を上げ下げし、コンタクトモードにおいてプローブ先端120と測定表面105との間に一定の力をもたらす。
【0030】
他の機能の中で特に、コントローラ135は、その開示が、引用することにより、本明細書の一部をなすものとする、2011年2月25日に出願された、C. Moonによる「Atomic Force Microscopy Controller and Method」という名称の、同一出願人が所有する国際出願第PCT/US11/26191号に記載されているように、カンチレバーアーム115が測定表面105から離れると起こる可能性のある共鳴条件(「オフ表面共鳴条件」)に対処するように構成することができる。
【0031】
コントローラ135は、ソフトウェア、ファームウェア、ハードワイヤードロジック回路、又はそれらの組合せを使用して、プロセッサ若しくは中央処理装置(CPU)、特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又はそれらの組合せ等の処理デバイスによって全体的に又は部分的に実装することができる。コントローラ135の機能の或る態様の詳細は、代表的な実施形態に関連して以下で提供される。幾つかの実施形態では、コントローラ135は、AFM100で使用されるリアルタイムオペレーティングシステム(OS)上で又はスタンドアローンデバイスとして実装される。プロセッサ又はCPUを使用するとき、コントローラ135からアクチュエータ110への信号を制御する実行可能ソフトウェア/ファームウェア及び/又は実行可能コードを記憶するためのメモリ(図示せず)が含まれる。メモリは、任意の数、任意のタイプ、及び任意の組合せの不揮発性リードオンリーメモリ(ROM)及び揮発性ランダムアクセスメモリ(RAM)とすることができ、プロセッサ又はCPUによって実行可能なコンピュータプログラム及びソフトウェアアルゴリズム等の種々のタイプの情報を記憶することができる。メモリは、ディスクドライブ、電気的にプログラム可能なリードオンリーメモリ(EPROM)、電気的に消去可能かつプログラム可能なリードオンリーメモリ(EEPROM)、CD、DVD、ユニバーサルシリアルバス(USB)ドライブ等のような、任意の数、任意のタイプ、及び任意の組合せの有形のコンピュータ可読記憶媒体を含むことができる。
【0032】
例えば、コントローラ135は、ハードウェア記述言語(Verilog又はVHDL等)コードがコンパイルされアップロードされているFPGAを含むことができる。検出器130からの偏向信号は、ADCによってデジタル化される。FPGAは、偏向信号に基づいてコントローラ出力信号を生成し、コントローラ出力信号は、DACから出て、増幅され、次に、アクチュエータ110に提供される。コントローラ135は、例示として、例えば当業者に知られている比例−積分−微分(PID)フィルタブロック及び一連のデジタル4次フィルタ(digital biquadratic filter)を含む。コントローラ135のPIDフィルタブロック及びデジタル4次フィルタは、以下で論じるフィルタ特性を確立するときに有用な係数を有する。係数は、リモートコンピュータ(例えば、AFM100用のグラフィカルユーザインタフェースをホストし、イーサネット(登録商標)等の通信プロトコルを介して通信するコンピュータ)による等で、フィルタ特性を変更するように動的に再構成することができる。代替的には、コントローラ135は、引用することにより本明細書の一部をなすものとする、D. Abramovitch他による同一出願人が所有する米国特許第7,987,006号に記載されているように、モータダイナミクスを補償するように自動的に調節することができる。
【0033】
コントローラ135の周波数応答(コントローラ応答)は、フィルタ係数の関数であり、デジタルフィルタ用の理論的な周波数応答を計算するための方法は、よく知られている。例示として、コントローラ135の周波数応答は、既知のプログラミングソフトウェア(例えば、Matlab)を使用して計算することができる。例えば、引用することにより本明細書の一部をなすものとする、C. Moonによる同一出願人が所有する国際出願第PCT/US11/26191号に記載されている、カンチレバーアーム115のオフ表面共鳴を軽減するときに使用するためのノッチフィルタは、中心周波数、深さ、及び幅(品質(Q)又はダンピング係数)によって指定することができる。
【0034】
図2は、代表的な実施形態による図1のAFM100の簡略化したブロック図である。図1と比較して、図2は、AFM特性のより一般的なモデルを示す。例えば、図2のAFM100は、種々の代替的なタイプのセンサによってカンチレバーアームの偏向量を検出することができ、図1に示すようなレーザ検出に限定されない。同様に、図2のAFM100は、種々の代替的なタイプのアクチュエータを使用してカンチレバーアーム及びプローブ先端の移動を制御することができる。
【0035】
図2を参照すると、AFM100は、コントローラ135及びシステム205を備える。システム205は、コントローラ135によって生成されるコントローラ出力信号と、コントローラ135によって受信されるカンチレバー偏向信号との間の応答経路内のAFMコンポーネントの抽象的な、すなわち「ブラックボックス(black box)」の表現である。システム205は、一般に、コントローラ出力信号に応答してカンチレバーアームを制御するためのアクチュエータ等のコンポーネントと、カンチレバーアームの偏向を検出し、カンチレバー偏向信号を生成するためのセンサ等のコンポーネントとを備える。
【0036】
コントローラ135は、周波数応答C(ω)を特徴とし、システム205は、周波数応答P(ω)を特徴とする。したがって、AFM100の総合ループ応答L(ω)は、L(ω)=P(ω)C(ω)又はL=PCとして規定することができる。幾つかの実施形態では、P(ω)は、直接測定され、次にC(ω)は、所望のループ応答L(ω)を達成するために、コントローラ135の或るパラメータを変更することによって調節される。幾つかの実施形態では、周波数応答P(ω)は、AFM100の、内蔵された能力を使用して測定することができる。例えば、コントローラ135は、コントローラ出力信号として正弦波をシステム205に適用し、その後、P(ω)を求めるために、結果として得られるカンチレバー偏向信号を測定することができる。AFM等の多くの電気機械システムの場合、P(ω)の直接測定は難しく、P(ω)C(ω)は、システムが閉ループ内にあるときに測定されるか、又は、T(ω)=L(1+L)−1で通常示される閉ループ応答から抽出される。これらの組合せた測定から、P(ω)が抽出され、C(ω)を、コントローラモデルに対して検証することができる。
【0037】
周波数応答P(ω)の計算に含まれる正確な量は、AFM100のモードに依存する。例えば、コンタクトモードでは、P(ω)は、コントローラ出力信号に対するカンチレバー偏向信号の応答である。図8のaの曲線805に示すように、通常の周波数応答P(ω)は、単純なPIDコントローラ又はPIコントローラによって補償することができない振動共鳴のフォレストを含む。したがって、所望のループ応答L(ω)を達成するには、C(ω)は、高次共鳴を補償するように設計されるべきである。これによって、AFM100は、高次共鳴に従ってプローブ先端120の高さを適切に調整することが可能になり、それによって、AFM100の精度も改善しながら、不安定な動作及びAFM100に対する起こり得る損傷を防止することができる。以下で説明するように、C(ω)は、自動的に調節することができ、それによって、多くの従来システムによって必要とされるように、専門家のシステム検証又は調節の必要性が回避される。
【0038】
図3は、代表的な実施形態によるAFM100内のコントローラ135のブロック図である。この実施形態は、高次共鳴に対処するためにC(ω)を調節することができるようにコントローラ135を実装する1つの方法を示す。
【0039】
図3を参照すると、コントローラ135は、「n個」のデジタルフィルタF1、F2、F3、...、Fnを備える。これらのフィルタは、縦続形式で配列され、フィルタはそれぞれ、複数の係数によって表すことができる。AFMコントローラについてのカスケードフィルタ構成の例は、その主題が、引用することにより、本明細書の一部をなすものとする、2011年2月28日に出願され、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、同一出願人が所有する国際出願第PCT/US11/26555号に記載されている。1つの例では、フィルタのうちの1つ又は複数は、3つの係数で通常表されるPIDフィルタとすることができる。他のフィルタは、それぞれ4つの係数で表すことができる4次フィルタ(biquadratic filter)とすることができる。コントローラ135は、或る設計目標に関して全てのコントローラ係数の値を最適化する方法を使用して調節される。これは、所望のループ応答L(ω)を達成するために、例えば反復プロセスにおいて、同時に又は異なる時間にフィルタを調節することによって実施することができる。
【0040】
図4は、代表的な実施形態によるAFMコントローラを調節する方法を示すフローチャートである。便宜上、図4の方法は、図3のAFM100を参照して説明される。続く説明では、例示的な方法ステップは、例示的な方法ステップを例示的なシステム又はデバイスの特徴部と区別するために括弧(SXXX)で示される。
【0041】
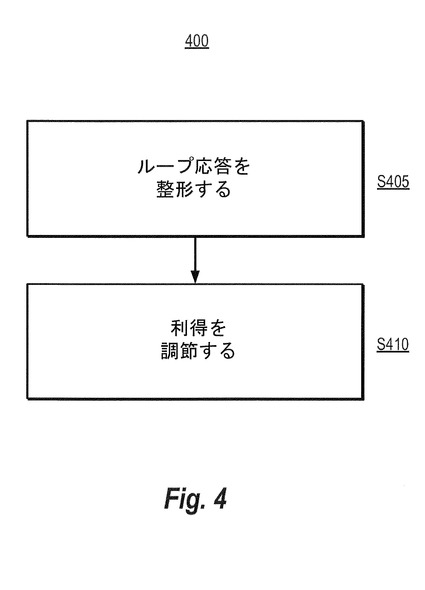
図4を参照すると、方法は、所望のループ形状に一致するようにループ応答L(ω)を整形する(S405)ことから開始する。このループ整形が実施されるとき、システム205の周波数応答P(ω)が正確に測定されていることと、コントローラ135が、既知のアーキテクチャを有すること、すなわち、コントローラ135が、フィルタ及び初期フィルタ係数の既知の組を含むこととが仮定される。したがって、ループ整形は、上述したように、L(ω)とL0(ω)との大きさの差等のターゲット応答特性を最小にするようにフィルタ係数を調整することによって実施される。このループ整形を達成することができる方法の異なる例が、図5及び図6に示される。一般に、ループ整形は、CPU、再構成可能ハードウェア、カスタムハードウェア、又は他の計算装置等の自動ループ整形コンポーネントによって実施することができる。
【0042】
ループ応答が整形された後、コントローラ135の利得が、或る設計目標及び/又は所与の頑健性マージンを達成するように調整される(S410)。この利得調整の例は、図9に示され、図9は、以下で更に説明するように、多くのループ整形及び利得調整反復の正味の作用を示す。幾つかの実施形態では、利得は、ループ応答の位相が−180度以下である場合に、ループ応答の大きさが既定の利得マージンより小さくなるように調整される。幾つかの実施形態では、利得は、ループ応答の大きさが1以上である場合に、ループ応答の位相が、既定の位相マージンから180度を引いた値より大きくなるように調整される。一般に、利得調整は、CPU、再構成可能ハードウェア、カスタムハードウェア、又は他の計算装置等の利得調整コンポーネントによって実施することができる。さらに、利得調整は、自動ループ整形と同じ装置によって形成することができる。
【0043】
図5は、代表的な実施形態による図4の方法におけるAFM100のループ応答を整形する方法を示すフローチャートである。上記で示したように、この方法は、周波数応答P(ω)が正確に測定されていることと、コントローラ135が、既知のアーキテクチャを有することとを仮定する。さらに、コントローラ135のフィルタ係数が、初期値に設定されていることが仮定される。図7を参照して以下で説明するように、ループ整形の性能を改善するために、フィルタ係数を知的に初期化する複数の方法が存在する。
【0044】
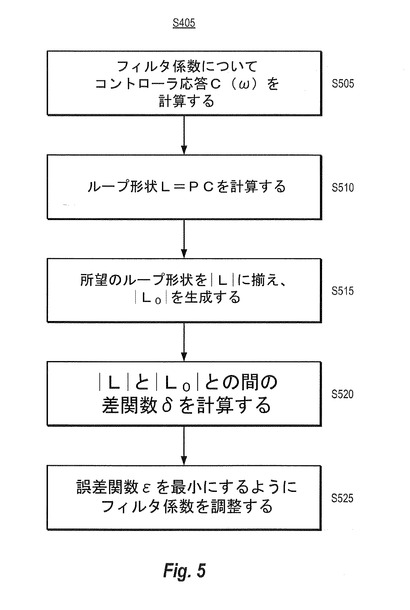
図5を参照すると、方法は、フィルタ係数の初期の組について周波数応答C(ω)を計算する(S505)ことから開始する。このステップは通常、フィルタを表す、厳密な離散化形態のフィルタの式を使用して実施される。
【0045】
次に、方法は、式L(ω)=P(ω)C(ω)を使用して、結果として得られるループ形状を計算する(S510)。その後、計算されたループ応答L(ω)の大きさが、所望のループ形状に低周波において揃えられ、揃えられた応答L0(ω)が生成される(S515)。換言すれば、求められたループ応答の大きさを所望のループ形状に揃えることは、求められたループ応答の大きさの低周波領域を所望のループ形状の低周波領域において揃えることを含む。この低周波において揃える例は、図8のbの曲線815と820との間で揃えることによって示される。
【0046】
|L(ω)|と|L0(ω)|とを揃えた後、方法は、式δ(ω)=20log10(|L(ω)|/|L0(ω)|)を使用して、|L(ω)|と|L0(ω)|との大きさの差δ(ω)をデシベル(dB)で計算する(S520)。最後に、方法は、コスト関数ε=rms[δ(ω)]を最小にするようにフィルタ係数を調整する(S525)。
【0047】
フィルタ係数を調整するプロセスは、或る反復方法を含む種々の方法で実施することができる。例えば、幾つかの実施形態では、コントローラ135は、複数の4次フィルタとカスケードシーケンスで配列されたPIDを備える。こうした実施形態では、PID及び4次フィルタは、1度に1つ調節することができ、連続して調節された各フィルタは、コントローラ135にすでに含まれている前に調節されたフィルタに追加される。
【0048】
PIDは通常、式I(1/s+P/I+(D/I)s)としてPIDを書き直し、式を離散化し、積分項を、必要とされる頑健性マージンによって後で求められることになる総合利得係数として引出し、その後、コスト関数εを最小にするようにP/I及びD/Iを最適化することによって、調節される。ここで、s=iωであり、P、I、及びDはPID係数である。
【0049】
4次フィルタは、4つの独立パラメータ及び1となるDC利得を有するように選択することができる。さらに、総合利得を1にするスケーリング係数は、例えば2011年2月28日に出願され、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、同一出願人が所有する国際出願第PCT/US11/26555号に記載されているように、レイテンシを最小にするために、他のフィルタセクションからのスケーリング係数によってグループ化することができる。4次フィルタのパラメータは、分子及び分母としてそれぞれ周波数及び品質係数(Q)にマッピングすることができる。コスト関数εが、これらの係数の空間内に多くの極小を有する可能性があるため、また、各4次フィルタが、狭い周波数範囲だけに影響を及ぼす可能性があるため、インテリジェントな初期推測によって各4次フィットを提供することが有利である場合がある。したがって、分子の周波数及び分母の周波数は、例えば図8のcの曲線830によって示すように、大きさの差の曲δ(ω)の顕著な特徴部でシード(seed)することができる。
【0050】
特に、δ(ω)の全てのピーク及び谷が重要であるとは限らないため、4次フィルタは、不十分な整形によりAFMの性能が制限されるような周波数をターゲットにすべきである。一般に、達成可能な帯域幅を制限する2つの方法が存在する。第1に、高周波のピークは、利得が増加する場合、ループ応答を不安定にさせる可能性がある。第2に、位相は、クロスオーバ周波数で利得を制限する可能性がある。より具体的には、システムは、クロスオーバの近くの不十分な整形によって、又は、不可避の非最小位相によって、位相制限される可能性がある。
【0051】
上記制限はともに、|L(ω)|が1に近い場合に発現される傾向がある。さらに、クロスオーバ未満では、|L(ω)|が1より大きい場合、意図される形状からの逸脱は、AFM画像の歪をもたらすことになるため、AFM帯域幅をたとえ制限しなくても、補正もされなければならない。最後に、コントローラ135の出力におけるリンギングを防止するために、閉ループ応答関数T(ω)=L(1+L)−1における大きなピークを回避することが有利である。これらの考慮事項及び他の考慮事項に基づいて、4次フィルタを適切に初期化するための重み付け関数を設計することができる。こうした重み付け関数の1つの例は、式w(ω)=min(|L|,1)|T|2によって提供される。
【0052】
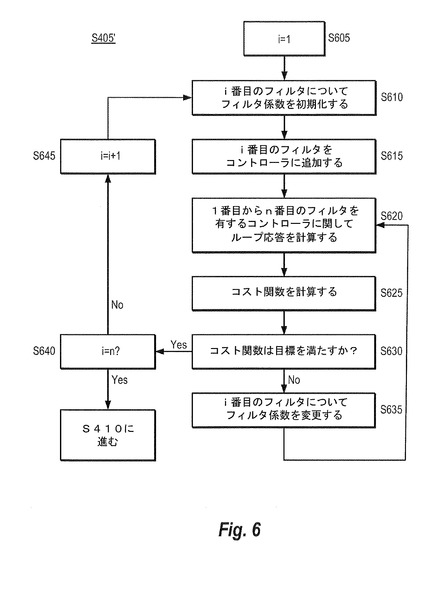
図6は、代表的な実施形態による図5の方法の変形形態を示すフローチャートである。図6の実施形態は、図4の方法におけるAFM100のループ応答を整形するための反復方法S405’である。さらに、方法は、例えば図3に示すように、n個のフィルタを有するコントローラ135によって実施される。
【0053】
図6を参照すると、方法は、コントローラ135において第1のフィルタを選択するためにインデックスi=1に初期化することから開始する(S605)。次に、方法は、i番目のフィルタについてフィルタ係数を初期化する(S610)。PIDフィルタ又は4次フィルタの場合、この初期化は、図5に関して上述したように実施することができる。
【0054】
フィルタ係数が初期化された後、方法は、コントローラ135にi番目のフィルタを追加する(S615)。例えば、第1のフィルタがコントローラ135に追加された後、コントローラは、1つのフィルタのみを有することができるため、コントローラ応答は、そのフィルタの特性によって決まることになる。一方で、続いて、例えば図3に示すように第2のフィルタを第1のフィルタに連続する形式で付加することによって第2のフィルタをコントローラ135に追加することができ、それにより、コントローラ応答は、第1のフィルタと第2のフィルタとの合成特性によって決まる。
【0055】
次に、ループ応答L(ω)は、第1番目〜第i番目のフィルタを有するコントローラ135の周波数応答C(ω)と組合せて、測定された周波数応答P(ω)に基づいて計算される(S620)。その後、コスト関数が、計算されたループ応答に関して計算され(S625)、コスト関数がある目標を満たすかどうかを判定するために、コスト関数が評価される(S630)。この場合、目標は、例えば、第1番目〜第i番目のフィルタを有するコントローラ135についてコスト関数を最小にすることであるとすることができる。コスト関数は、上述したようなε、又は、ループ応答L(ω)とターゲット応答特性との間のある他の類似性メトリックとすることができる。
【0056】
コスト関数が目標を満たす(S630=Yes)場合、方法は、n個のフィルタのそれぞれが、コントローラ135に追加されたかどうかを判定する(S640)。追加されない(S640=No)場合、方法は、インデックスiをインクリメントし、ステップS610に戻る。そうでない(S640=Yes)場合、方法は、図4のステップS410に進む。コスト関数が目標を満たさない(S630=No)場合、i番目のフィルタのフィルタ係数が、例えば或る最適化関数に従って変更される(S635)。換言すれば、ステップS635は、フィルタ係数を更新することを含む。その後、方法は、ステップS620に戻る。
【0057】
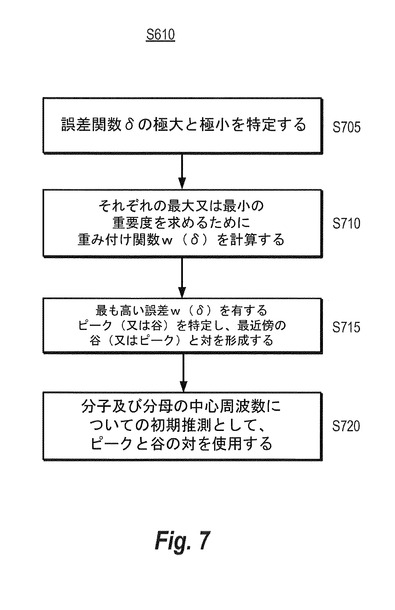
図7は、代表的な実施形態による図5及び図6における方法のフィルタ係数を初期化する方法を示すフローチャートである。図7の方法は、例えば、図6のステップS610において4次フィルタのフィルタ係数について初期推測を生成するために使用することができる。
【0058】
図7を参照して、方法は、誤差関数δ(ω)の極大及び極小を特定する(S705)ことから開始する。例えば、極大及び極小は、図8のcの曲線825に示すような誤差関数において特定することができる。
【0059】
次に、方法は、それぞれの最大又は最小の重要度を求めるために重み付け関数w(ω)を計算し(S710)、その後、重み付けされた最も高い誤差w(ω)|δ(ω)|を有するピーク(又は谷)を特定し、それを、最近傍の谷(又はピーク)と対を形成する(S715)。重み付け関数(すなわち、ωの種々の異なる値のそれぞれについての重み)は、図4及び図5に関連して上述したように計算することができる。最後に、方法は、4次フィルタを、その分子及び分母の中心周波数についての初期推測として対形成されたピーク及び谷を使用して調節する(S720)。図8のcの例では、こうした初期推測を有する4次フィルタは、曲線830によって示される。
【0060】
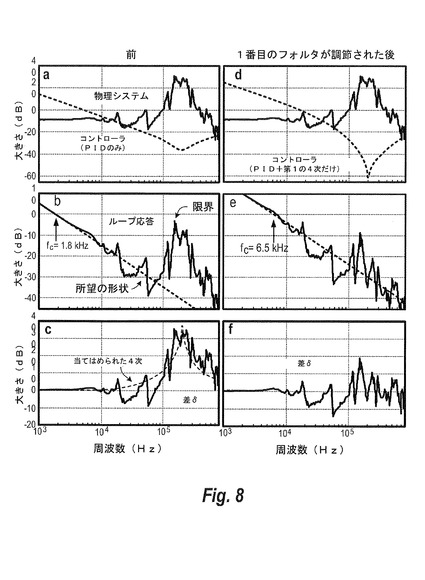
図8のa〜図8のfは、代表的な実施形態による図5〜図7の方法に関連する種々のAFM特性を示すグラフである。便宜上、図8のa〜図8のfのグラフは、図2のAFM100によって生成されたかのように説明される。
【0061】
図8のaでは、曲線805はシステム205の|P(ω)|を表し、曲線810はPIDフィルタのみを有するコントローラ135の|C(ω)|を表す。曲線805に示すように、システム205の周波数応答は、共鳴で満ちている。さらに、コントローラ135内の単一PIDフィルタは、上述したような方法のような方法を使用して最適に調節されるときでも、単純過ぎて、共鳴を相殺することができない。したがって、更なるフィルタが、図8のd〜図8のfによって示すように、これらの共鳴に対処するためにコントローラ135に付加される。
【0062】
図8のbでは、曲線815は、低周波で所望のループ形状に揃えた|L(ω)|を表し、曲線820は、|L0(ω)|、すなわち所望のループ形状の大きさを表す。|L(ω)|は、図8のaに示す2つの曲線の積として計算され、所望のループ形状は、単従な積分器として選択される。この例では、コントローラ135の総合利得は、3dBの必要とされる利得マージンによって150kHzで制限される。換言すれば、コントローラ135の利得は、|L(ω)|が150kHzで0dBに近づくため、AFM100を不安定にすることなく増加することができない。
【0063】
図8のcでは、曲線825は、図8のbの曲線について差関数δ(ω)を表し、曲線830は、差関数δ(ω)に当てはめられた4次フィルタを表す。4次フィルタは、150kHzで制限ピークを補償することができるように、インテリジェントな初期推測によって、その4つの係数をシードし、その後、シードされた係数に対して最適化を実施することによって、曲線825に当てはめられる。上述したように、差関数δ(ω)に当てはめられた4次フィルタは、AFM100の高次共鳴を処理するために、反転し、その後、コントローラ135に追加することができる。
【0064】
図8のdでは、曲線835は、システム205の|P(ω)|を表す。換言すれば、曲線835は、図8のaの曲線805と同じである。曲線840は、コントローラ135の|C(ω)|を表し、PID及び4次フィルタは、図3の場合のように直列に配列される。曲線840についての4次フィルタは、図8のcの(差)曲線825に対応する共鳴を相殺するために、当てはめられた4次フィルタ応答(曲線830)を反転することによって生成されたものである。
【0065】
図8のeでは、曲線845は、図8のdの曲線から導出された|L(ω)|を表し、曲線850は、低周波で曲線845に揃えた|L0(ω)|を表す。曲線850は、図8のbの曲線820と同じ形状及び傾斜を有するが、そのクロスオーバ周波数は、約5kHzだけ増加する。このシフトは、曲線845が、150kHzにおいて、図8のbの曲線815と同じ制限を持たないことによって可能になる。むしろ、4次フィルタの付加は、曲線815と比較して、約20dBだけ曲線845の最大ピークを減少させている。さらに、このシフトは、約3.6倍のコントローラ135の総合利得の増加に相当し、AFM100の帯域幅の大幅な増加を可能にする。図示しないが、図8のeの例では、新しいクロスオーバ周波数は、L(ω)の大きさではなくL(ω)の位相によって制約される。
【0066】
図8のfでは、曲線855は、図8のeの2つの曲線から計算された差関数δ(ω)を表す。この差曲線は、図8のc及び図8のdの4次フィルタを生成するために使用された同じ技法によって別の4次フィルタを生成するために使用することができる。さらに、更なる4次を生成するプロセスは、所定の数のフィルタがコントローラ135について調節されるまで繰り返すことができる。
【0067】
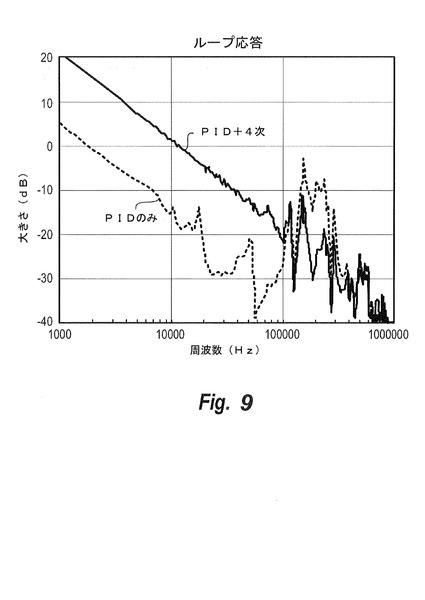
図9は、代表的な実施形態による、調節された複数の4次フィルタがコントローラ135に追加された後のAFM100のループ応答を示すグラフである。この例では、PIDフィルタは、コントローラ135において16個の4次フィルタと結合された。
【0068】
図9では、曲線905は、PIDフィルタ及び16個の4次フィルタのそれぞれが、図4の方法を使用して調節されている|L(ω)|を表し、曲線910は、コントローラ135のPIDフィルタのみが調節されている|L(ω)|を表す。図9が示すように、調節された16個の4次フィルタを付加することで、AFM100のフィードバック帯域幅が約1桁増加する。これは、AFM100の撮像速度を大幅に改善するために使用することができる。
【0069】
図9の4次フィルタは、低周波数でかつクロスオーバ周波数の近くで、所望の積分器応答にループ応答をほぼ一致させたが、応答が小さく、したがって、重要でない高周波数においてループ応答が発散することを可能にすることに留意されたい。総合利得は、60度の位相マージンの要件によって制限されており、システムの負位相は、クロスオーバ周波数を、約12kHz未満に制約する。2011年2月28日に出願された、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、国際出願第PCT/US11/26555号に記載されるように、時間遅延を最小にする4次フィルタの使用は、最小の負位相の付加によって、高周波数における複数の共鳴の補償を可能にする。
【0070】
上述したように、コントローラ135は、反復手法又は種々の代替的な手法を使用して調節することができる。或る代替的な手法では、PIDフィルタ及び1つ又は複数の4次フィルタが、同時に再最適化されるか、又は複数の4次フィルタが同時に当てはめられる。さらに、幾つかの代替的な手法では、コントローラ全体が、フィルタの全てを同時に調節することによって設計される。それでも、大きなパラメータ空間内の最適化アルゴリズムは、時間がかかり、浅い極小に陥り易い。したがって、上述したような反復方法のような反復方法は、所与のフィットについて空間を低減するために使用され、制限エリアをターゲットにする効果的な初期推測を可能にすることができる。反復方法の考えられる欠点は、反復方法が、大域的最適を見出すのに失敗する場合があることである。しかし、各フィルタを、一回再調節すること、他のフィルタの存在下でフィルタを再当てはめすること等、この欠点に対処する複数の方法が存在する。
【0071】
カンチレバーアームの高さ信号、すなわちz値に関してフィードバック帯域幅を改善するための幾つかの方法を説明したが、これらの方法は、カンチレバーアームのx値及びy値、交流(AC)振幅、AC周波数、及び先端バイアス信号等の、他の信号に関してフィードバック帯域幅を改善するために適合又は修正することができる。さらに、説明する方法は、フィードバックコントローラ及びフィードフォワードコントローラの両方で使用するように適合することもできる。これらの適合のそれぞれにおいて、コントローラ調整は、所望のループ形状を達成するために行うことができる。さらに、上記方法は、AFMに限定されず、非常に単純なコントローラによって制限される任意のフィードバックシステムを改善するために使用することができる。
【0072】
或る実施形態では、コントローラ135は、再構成可能なハードウェアに実装することができる。例えば、PIDフィルタ及び複数の4次フィルタは、CPU上で得られる調節用パラメータに基づいてFPGA内にプログラミングすることができる。しかし、説明する実施形態は、FPGA又はCPU等の特定の実装形態又はコンポーネントに限定されない。むしろ、説明する実施形態は、説明する機能を実施することが可能な要素を任意の組合せで実装することができる。
【0073】
代表的な実施形態が本明細書で開示されたが、本教示による多くの変形形態が可能であり、また、添付の特許請求の範囲の範囲内に留まることを当業者は認識する。したがって、本発明は、添付の特許請求の範囲の範囲を除いて制限されない。
【符号の説明】
【0074】
100 原子間力顕微鏡(AFM)
105 測定表面
110 アクチュエータ
120 プローブ先端
125 レーザ
130 検出器
135 コントローラ
【背景技術】
【0001】
原子間力顕微鏡(AFM)は、試料の表面にわたって機械式プローブ先端を走査することによって画像を採取する。プローブ先端は、該プローブ先端と試料との間の分子力又は摩擦を検知する。この検知は、様々なAFMモードに従って様々な方法で実施することができる。例えば、コンタクトモードでは、プローブ先端は、該プローブ先端と試料との間の力に応答して偏向するカンチレバー上に搭載される。この偏向は、検出される力を、試料の表面特徴部を表すものに変換するために測定される。
【0002】
プローブ先端は、試料にわたって走査されるため、表面トポロジを正確に追跡するために高さ調整を必要とする場合がある。一般に、プローブ先端は、正確な検知のために表面に十分近く維持されるべきであるが、先端と試料との間の力がプローブ先端及び試料に損傷を与えるのに十分大きくなるほど近く維持されるべきではない。
【0003】
プローブ先端の高さは、フィードバックループを有するコントローラによって調整される。コントローラは、プローブ先端を所望の量だけ上下に移動させるための制御信号をアクチュエータに出力し、制御信号に対する任意の必要な調整を決定するためのフィードバック信号を、フィードバックループを通して受信する。制御信号とフィードバックループとの間に位置するコンポーネントは、総称的にAFMの物理システムと呼ばれる。フィードバック信号は、例えば、プローブ先端の所望の移動とプローブ先端の実際の移動との間の差を示すことができる。フィードバック信号はまた、プローブ先端と試料との間の相互作用を示すことができる。
【0004】
表面を安全に撮像するために、コントローラは、プローブ先端が試料表面に沿って走査されるときに、適時に正確な方法でプローブ先端の高さを調整することができなければならない。そうでなければ、プローブ先端は、コントローラが、必要な調整を行うことができる前に、サンプル表面にぶつかる場合がある。その結果、プローブ先端の安全な走査速度は、コントローラフィードバックループの帯域幅によって制限される。
【0005】
多くの市販のAFMコントローラでは、フィードバックループは、制御信号を更新するために、比例−積分(PI:proportional-integral)フィルタ又は比例−積分−微分(PID:proportional-integral derivative)フィルタを使用する。しかし、これらのフィルタが単純であるため、フィードバックループは、プローブ先端の高さに影響を及ぼす可能性がある高次振動共鳴を補正することができない。このように、高次共鳴を補正することができないことは、プローブ先端が、安定した動作を提供するためによりゆっくりした速度で移動されなければならないことを意味する。さらに、ほとんどのAFMは、ユーザが、フィードバックループのパラメータを調節することを必要とするが、ほとんどのユーザは、高次共鳴を補正するのに必要とされるパラメータを適切に構成することができない。
【0006】
学究的な制御理論家は、AFMのフィードバック帯域幅を増加させるために、より精巧なAFMコントローラを設計してきたが、これらのAFMコントローラは、重大な弱点も有する。これらのAFMコントローラは、通常、システム同定と呼ばれるプロセスにおいてAFMシステムの解析モデルを構築し、その後、モデル化されたAFMシステムに関する或る設計目標を満たすAFMコントローラ用の公式を生成することによって設計される。例えば、AFMシステムの解析モデルは、AFMシステムの周波数応答を測定し、その後、被測定システムの複素数値の極及びゼロの全てを捕捉する式を生成することによって構築することができる。AFMコントローラ用の公式は、その後、AFMシステムの式に基づいて生成することができる。
【0007】
学究的に設計されたAFMコントローラの1つの弱点は、システム同定が不正確であるため、システム同定がAFMシステムの欠陥のある解析モデルを生成することである。これは、実際には十分に動作しない理論的に最適なコントローラをもたらす可能性がある。学究的に設計されたAFMコントローラの別の弱点は、システム同定を行うツール及びその後のコントローラ設計を行うツールが、多くの(おそらくは弱く減衰した(weakly damped))極及びゼロを有するとともに時間遅延を有するシステムに対して機能しなくなる傾向があることである。これは、AFMの場合、一般的である。
【0008】
市販され学究的に設計されたAFMコントローラの上記欠点のため、ほとんどの既存のAFMコントローラは、多大な人間の相互作用及び検証によって設計される。換言すれば、精巧でかつ安定したAFMコントローラを作成するための自動方法は存在しない。
【発明の概要】
【発明が解決しようとする課題】
【0009】
したがって、必要とされるものは、従来のPIベースAFMコントローラ又はPIDベースAFMコントローラよりも精巧なAFMコントローラを設計するための自動方法である。
【課題を解決するための手段】
【0010】
一例示的な実施の形態によれば、物理システムと該物理システムを制御するように構成されたコントローラとを備えるAFMを調節する方法が提供される。該方法は、前記物理システムの周波数応答及び前記コントローラの周波数応答に基づいて前記AFMのループ応答を求めることと、前記ループ応答とターゲット応答特性との間の差を示すコスト関数を求めることと、前記差を減少させるように、前記コントローラの前記周波数応答を調整することとを含む。
【0011】
別の例示的な実施の形態によれば、物理システムと該物理システムを制御するように構成されたコントローラとを備えるAFMを調節する方法が提供される。該方法は、フィルタ係数の組(set)に基づいて前記コントローラの周波数応答を求めるステップと、前記コントローラの前記求められた周波数応答及び前記物理システムの測定された周波数応答に基づいて前記コントローラ及び前記物理システムのループ応答を求めるステップと、前記求められたループ応答の大きさを、所望のループ形状に揃えるステップと、前記求められたループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数の値を求めるステップと、前記誤差関数の値を改善するように前記フィルタ係数の前記組を調整するステップとを含む。
【0012】
別の例示的な実施の形態によれば、物理システムと、複数のデジタルフィルタを備え、前記物理システムを制御するように構成されたコントローラとを備えるAFMを調節するシステムが提供される。該システムは、前記物理システムの周波数応答及び前記コントローラの周波数応答によって規定されるループ応答に対して自動ループ整形を実施するループ整形コンポーネントと、前記ループ応答の極大の大きさに従って前記コントローラの利得を調整する利得調整コンポーネントとを備える。
【0013】
説明される実施形態は、添付図面とともに読まれると、以下の詳細な説明から最も良く理解される。適用可能でありかつ実用的である場合はいつも、同様な参照符号は同様な要素を指す。
【図面の簡単な説明】
【0014】
【図1】代表的な実施形態によるAFMのブロック図である。
【図2】代表的な実施形態による図1のAFMの簡略化したブロック図である。
【図3】代表的な実施形態による図1のAFM内のAFMコントローラのブロック図である。
【図4】代表的な実施形態によるAFMコントローラを調節する方法を示すフローチャートである。
【図5】代表的な実施形態による図4の方法のAFMのループ応答を整形する方法を示すフローチャートである。
【図6】代表的な実施形態による図5の方法の変形形態を示すフローチャートである。
【図7】代表的な実施形態による図5及び図6の方法のフィルタ係数を初期化する方法を示すフローチャートである。
【図8】代表的な実施形態による図5〜図7の方法に関連する種々のAFM特性を示すグラフである。
【図9】代表的な実施形態による、調節された複数の4次フィルタがコントローラに追加されているAFMのループ応答を示すグラフである。
【発明を実施するための形態】
【0015】
以下の詳細な説明では、限定ではなく説明のために、特定の詳細を開示する代表的な実施形態が、本教示の完全な理解を提供するために説明される。しかし、本明細書で開示される特定の詳細から逸脱する本教示による他の実施形態が、添付の特許請求の範囲の範囲内に留まることが本開示の利益を受ける当業者に明らかであろう。さらに、よく知られている装置及び方法の説明は、例示的な実施形態の説明を不明瞭にしないために省略される場合がある。こうした方法及び装置は、明らかに本教示の範囲内にある。
【0016】
本明細書で使用される用語は、特定の実施形態を説明するためだけのものであり、制限的であることを意図するものではない。規定される用語は、規定される用語の技術的意味及び科学的意味に加えて、本教示の技術分野で一般に理解され受容されるものである。明細書及び添付の特許請求の範囲で使用されるように、数量を特定していないものは、文脈が別途明確に指示しない限り、単数の指示対象と複数の指示対象の両方を含む。そのため、例えば、「デバイス」は、1つのデバイス及び複数のデバイスを含む。
【0017】
説明する実施形態は、一般に、物理システム及び該物理システムを制御するコントローラを備えるAFMを調節する方法に関する。或る実施形態では、AFMは、物理システムの周波数応答P(ω)を測定し、次に、物理システム及びコントローラの合成周波数応答が、或る設計目標を満たすように、コントローラの周波数応答C(ω)を調整することによって調節される。ループ応答とも呼ばれる、合成周波数応答は、L(ω)=P(ω)C(ω)として規定される。設計目標は、例えば、AFMを安定に維持しながら、物理システム内の高次共鳴に対処するためにループ応答L(ω)の帯域幅を最大にすることとすることができる。
【0018】
所望の帯域幅及び安定性を達成する1つの方法は、最初に、ループ応答の大きさ|L(ω)|が所望のループ形状の大きさ|L0(ω)|に一致するように、コントローラ応答を調節し、次に、ループ応答L(ω)の帯域幅を更に改善するためにコントローラの利得を調整することである。ループ形状は、その総合利得と無関係に応答曲線の相対的構造として規定される。例えば、積分器形状は、|L(ω)|=k/ωによって与えられる。
【0019】
コントローラは、通常、カスケード構成で配列されたデジタルフィルタの組(set)を備え、C(ω)は、フィルタの係数によって決まる。したがって、L(ω)は、最初に、P(ω)を測定し、次に、フィルタ係数に基づいてC(ω)を計算することによって計算することができる。測定されたP(ω)の例は、図8のaの曲線805によって示され、計算されたC(ω)の例は、図8のaの曲線810によって示される。C(ω)の計算は、AFMの実際のデジタルサンプルレート及びフィルタ用の離散的時間表現を使用して実行することができる。その後、L(ω)が、コントローラ係数の任意の組について全ての周波数で正確に予測することができる。予測されるループ応答L(ω)の例は、図8のbの曲線815によって示され、所望のループ応答L0(ω)の例は、図8のbの曲線820によって示される。
【0020】
L(ω)を計算することができることによって、AFMコントローラのフィルタ係数は、|L(ω)|と|L0(ω)|との差に関連する(related to)或るコスト関数εを最小にするように数値的に最適化することができる。コスト関数の1つの例は、ε=rms[δ(ω)]であり、ここで、rms[δ(ω)]は、差関数δ(ω)=20log10(|L(ω)|/|L0(ω)|)の、差の2乗平均平方根又は差の2乗和である。差関数の例は、図8のcの曲線825によって示される。
【0021】
差関数δ(ω)は、これらの関数が何桁にもわたるため、通常、L(ω)及びL0(ω)の対数値について計算される。曲線当てはめ(curve fitting)において対数スケーリングを使用するとともに、曲線適合のために大きさ応答を使用する例は、Sidman他、「Parametric System Identification on Logarithmic Frequency Response Data」、IEEE TRANSACTIONS ON AUTOMATIC CONTROL,VOL.36,NO.9,SEPTEMBER 1991に記載され、その主題が、引用することにより、本明細書の一部をなすものとする。一般に、対数スケーリングの使用は、P(ω)が対数的に離間した周波数で測定されながら、εが、何ディケイドもの周波数にわたって均等に重み付けされることを可能にする。結果として、コントローラ最適化は、ωの測定された値で評価されたlog10(L0(ω))に対するlog10(L(ω))の標準的なマルチパラメータフィットによって実施することができる。
【0022】
δ(ω)を計算した後、フィルタは、図8のcの曲線830によって示すように、差関数に当てはめることができる。当てはめられたフィルタは、その後、反転され、図8のdの曲線840によって示すようにコントローラに追加することができる。本明細書で用いられるとき、用語「追加する(append)」は、更なるフィルタ応答特性を反映するためのコントローラの修正を幅広く指すことができる。こうした修正は、例えばコントローラの周波数応答を規定する構成可能なハードウェア又はソフトウェアを修正することによって行うことができる。
【0023】
ループ応答を整形する際に、L(ω)の位相は、大きさ及び位相が関連するため、時々、無視される場合がある。よく知られているボード利得−位相関係は、安定した最小位相システム(複素平面の不安定部分に極もゼロもないシステム)について、位相及び利得が一意に関連していることを示す。そのため、|L(ω)|を整形することは、相応して、L(ω)の位相のこの部分を整形する。複素平面の不安定部分内で極及び/又はゼロが存在する結果、負位相が過剰になり、時間遅延も同様である。時間遅延によるこの余分の負位相は、|L(ω)|が適切に整形された後でも、コントローラの帯域幅に制限を課す。
【0024】
大きさが整形された後、コントローラの総合利得は、或る設計目標及び/又は所与の頑健性マージンを達成するように調整される。利得を調整する際に、大きさ及び位相を含む全ループ応答L(ω)が考慮される。例えば、総合利得は、位相及び利得のマージンに対する要件に従って、最大化され、コントローラが安定かつ頑健であることを保証することができる。代替的には、利得は、所望のクロスオーバ周波数又は閉ループ帯域幅を達成するようにその最大値未満に調節することができる。
【0025】
従来の方法と違って、上記方法は、コントローラを自動的に調節することによって高次共鳴に対処するために使用することができる。これによって、ユーザの介入又は専門家の解析の必要性をなくすことができ、また、より精巧なAFMシステムが使用されることを可能にすることができる。
【0026】
図1は、代表的な実施形態によるAFM100のブロック図である。この実施形態は、説明する方法を実施することができる1つのタイプのAFMを示し、当業者は、説明する方法を他のタイプのAFMで実施することができることを認識するであろう。さらに、或る実施形態が、コンタクトモードで動作するAFMに関して説明されるが、説明する実施形態は、当業者に明らかであるように、他のAFMモードとともに使用するように適合することができる。
【0027】
図1を参照すると、AFM100は、アクチュエータ110、レーザ125、検出器130、及びコントローラ135を備える。アクチュエータ110は、プローブ先端120を有するカンチレバーアーム115に接続されている。これらは、測定表面105の画像を採取するために使用される。画像は、測定表面105に対してプローブ先端120を移動させ、プローブ先端120と測定表面105との間の力又は相互作用に起因するカンチレバーアーム115の偏向を検出することによって採取される。
【0028】
画像採取中、アクチュエータ110は、プローブ先端120と測定表面105との間に実質的に一定の力を維持するために、測定表面105に対してカンチレバーアーム115及びプローブ先端120を上下に移動させる。幾つかの実施形態では、アクチュエータ110は、例えば、その主題が、引用することにより、本明細書の一部をなすものとする、2010年9月27日に出願された、D. Schroeder他による「Tandem Piezoelectric Actuator and Single Drive Circuit for Atomic Force Microscopy」という名称の、同一出願人が所有する米国特許出願第12/890,894号に記載されているような圧電アクチュエータとすることができる。代替的には、アクチュエータ110は、例えば、その開示が、引用することにより、本明細書の一部をなすものとする、1999年11月16日付けの、S. Hoen他による「Electrostatic Actuator with Spatially Alternating Voltage Patterns」という名称の、同一出願人が所有する米国特許第5,986,381号に記載されているような静電「ナノステッパ(nanostepper)」アクチュエータとすることができる。
【0029】
レーザ125(又は別の適した光源)は、測定表面105上に配置される。レーザ125は、光を方向付け、光は、カンチレバーアーム115において反射され、検出器130に入射する。検出器130は、プローブ先端120においてカンチレバーアーム115から光が反射される角度によって決まる偏向信号を生成し、偏向信号をアナログ/デジタル変換器(ADC)に転送する。ADCは、偏向信号をデジタル化して、カンチレバー偏向信号を生成し、カンチレバー偏向信号はコントローラ135に送信される。偏向信号は、測定表面105に対してZ方向へのプローブ先端120の移動を示す。偏向信号に応答して、コントローラ135は、デジタル/アナログ変換器(DAC)を介してアクチュエータ110にコントローラ出力信号を生成して、偏向設定点に等しい一定偏向を維持するように、カンチレバーアーム115及びプローブ先端120を上げ下げし、コンタクトモードにおいてプローブ先端120と測定表面105との間に一定の力をもたらす。
【0030】
他の機能の中で特に、コントローラ135は、その開示が、引用することにより、本明細書の一部をなすものとする、2011年2月25日に出願された、C. Moonによる「Atomic Force Microscopy Controller and Method」という名称の、同一出願人が所有する国際出願第PCT/US11/26191号に記載されているように、カンチレバーアーム115が測定表面105から離れると起こる可能性のある共鳴条件(「オフ表面共鳴条件」)に対処するように構成することができる。
【0031】
コントローラ135は、ソフトウェア、ファームウェア、ハードワイヤードロジック回路、又はそれらの組合せを使用して、プロセッサ若しくは中央処理装置(CPU)、特定用途向け集積回路(ASIC)、フィールドプログラマブルゲートアレイ(FPGA)、又はそれらの組合せ等の処理デバイスによって全体的に又は部分的に実装することができる。コントローラ135の機能の或る態様の詳細は、代表的な実施形態に関連して以下で提供される。幾つかの実施形態では、コントローラ135は、AFM100で使用されるリアルタイムオペレーティングシステム(OS)上で又はスタンドアローンデバイスとして実装される。プロセッサ又はCPUを使用するとき、コントローラ135からアクチュエータ110への信号を制御する実行可能ソフトウェア/ファームウェア及び/又は実行可能コードを記憶するためのメモリ(図示せず)が含まれる。メモリは、任意の数、任意のタイプ、及び任意の組合せの不揮発性リードオンリーメモリ(ROM)及び揮発性ランダムアクセスメモリ(RAM)とすることができ、プロセッサ又はCPUによって実行可能なコンピュータプログラム及びソフトウェアアルゴリズム等の種々のタイプの情報を記憶することができる。メモリは、ディスクドライブ、電気的にプログラム可能なリードオンリーメモリ(EPROM)、電気的に消去可能かつプログラム可能なリードオンリーメモリ(EEPROM)、CD、DVD、ユニバーサルシリアルバス(USB)ドライブ等のような、任意の数、任意のタイプ、及び任意の組合せの有形のコンピュータ可読記憶媒体を含むことができる。
【0032】
例えば、コントローラ135は、ハードウェア記述言語(Verilog又はVHDL等)コードがコンパイルされアップロードされているFPGAを含むことができる。検出器130からの偏向信号は、ADCによってデジタル化される。FPGAは、偏向信号に基づいてコントローラ出力信号を生成し、コントローラ出力信号は、DACから出て、増幅され、次に、アクチュエータ110に提供される。コントローラ135は、例示として、例えば当業者に知られている比例−積分−微分(PID)フィルタブロック及び一連のデジタル4次フィルタ(digital biquadratic filter)を含む。コントローラ135のPIDフィルタブロック及びデジタル4次フィルタは、以下で論じるフィルタ特性を確立するときに有用な係数を有する。係数は、リモートコンピュータ(例えば、AFM100用のグラフィカルユーザインタフェースをホストし、イーサネット(登録商標)等の通信プロトコルを介して通信するコンピュータ)による等で、フィルタ特性を変更するように動的に再構成することができる。代替的には、コントローラ135は、引用することにより本明細書の一部をなすものとする、D. Abramovitch他による同一出願人が所有する米国特許第7,987,006号に記載されているように、モータダイナミクスを補償するように自動的に調節することができる。
【0033】
コントローラ135の周波数応答(コントローラ応答)は、フィルタ係数の関数であり、デジタルフィルタ用の理論的な周波数応答を計算するための方法は、よく知られている。例示として、コントローラ135の周波数応答は、既知のプログラミングソフトウェア(例えば、Matlab)を使用して計算することができる。例えば、引用することにより本明細書の一部をなすものとする、C. Moonによる同一出願人が所有する国際出願第PCT/US11/26191号に記載されている、カンチレバーアーム115のオフ表面共鳴を軽減するときに使用するためのノッチフィルタは、中心周波数、深さ、及び幅(品質(Q)又はダンピング係数)によって指定することができる。
【0034】
図2は、代表的な実施形態による図1のAFM100の簡略化したブロック図である。図1と比較して、図2は、AFM特性のより一般的なモデルを示す。例えば、図2のAFM100は、種々の代替的なタイプのセンサによってカンチレバーアームの偏向量を検出することができ、図1に示すようなレーザ検出に限定されない。同様に、図2のAFM100は、種々の代替的なタイプのアクチュエータを使用してカンチレバーアーム及びプローブ先端の移動を制御することができる。
【0035】
図2を参照すると、AFM100は、コントローラ135及びシステム205を備える。システム205は、コントローラ135によって生成されるコントローラ出力信号と、コントローラ135によって受信されるカンチレバー偏向信号との間の応答経路内のAFMコンポーネントの抽象的な、すなわち「ブラックボックス(black box)」の表現である。システム205は、一般に、コントローラ出力信号に応答してカンチレバーアームを制御するためのアクチュエータ等のコンポーネントと、カンチレバーアームの偏向を検出し、カンチレバー偏向信号を生成するためのセンサ等のコンポーネントとを備える。
【0036】
コントローラ135は、周波数応答C(ω)を特徴とし、システム205は、周波数応答P(ω)を特徴とする。したがって、AFM100の総合ループ応答L(ω)は、L(ω)=P(ω)C(ω)又はL=PCとして規定することができる。幾つかの実施形態では、P(ω)は、直接測定され、次にC(ω)は、所望のループ応答L(ω)を達成するために、コントローラ135の或るパラメータを変更することによって調節される。幾つかの実施形態では、周波数応答P(ω)は、AFM100の、内蔵された能力を使用して測定することができる。例えば、コントローラ135は、コントローラ出力信号として正弦波をシステム205に適用し、その後、P(ω)を求めるために、結果として得られるカンチレバー偏向信号を測定することができる。AFM等の多くの電気機械システムの場合、P(ω)の直接測定は難しく、P(ω)C(ω)は、システムが閉ループ内にあるときに測定されるか、又は、T(ω)=L(1+L)−1で通常示される閉ループ応答から抽出される。これらの組合せた測定から、P(ω)が抽出され、C(ω)を、コントローラモデルに対して検証することができる。
【0037】
周波数応答P(ω)の計算に含まれる正確な量は、AFM100のモードに依存する。例えば、コンタクトモードでは、P(ω)は、コントローラ出力信号に対するカンチレバー偏向信号の応答である。図8のaの曲線805に示すように、通常の周波数応答P(ω)は、単純なPIDコントローラ又はPIコントローラによって補償することができない振動共鳴のフォレストを含む。したがって、所望のループ応答L(ω)を達成するには、C(ω)は、高次共鳴を補償するように設計されるべきである。これによって、AFM100は、高次共鳴に従ってプローブ先端120の高さを適切に調整することが可能になり、それによって、AFM100の精度も改善しながら、不安定な動作及びAFM100に対する起こり得る損傷を防止することができる。以下で説明するように、C(ω)は、自動的に調節することができ、それによって、多くの従来システムによって必要とされるように、専門家のシステム検証又は調節の必要性が回避される。
【0038】
図3は、代表的な実施形態によるAFM100内のコントローラ135のブロック図である。この実施形態は、高次共鳴に対処するためにC(ω)を調節することができるようにコントローラ135を実装する1つの方法を示す。
【0039】
図3を参照すると、コントローラ135は、「n個」のデジタルフィルタF1、F2、F3、...、Fnを備える。これらのフィルタは、縦続形式で配列され、フィルタはそれぞれ、複数の係数によって表すことができる。AFMコントローラについてのカスケードフィルタ構成の例は、その主題が、引用することにより、本明細書の一部をなすものとする、2011年2月28日に出願され、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、同一出願人が所有する国際出願第PCT/US11/26555号に記載されている。1つの例では、フィルタのうちの1つ又は複数は、3つの係数で通常表されるPIDフィルタとすることができる。他のフィルタは、それぞれ4つの係数で表すことができる4次フィルタ(biquadratic filter)とすることができる。コントローラ135は、或る設計目標に関して全てのコントローラ係数の値を最適化する方法を使用して調節される。これは、所望のループ応答L(ω)を達成するために、例えば反復プロセスにおいて、同時に又は異なる時間にフィルタを調節することによって実施することができる。
【0040】
図4は、代表的な実施形態によるAFMコントローラを調節する方法を示すフローチャートである。便宜上、図4の方法は、図3のAFM100を参照して説明される。続く説明では、例示的な方法ステップは、例示的な方法ステップを例示的なシステム又はデバイスの特徴部と区別するために括弧(SXXX)で示される。
【0041】
図4を参照すると、方法は、所望のループ形状に一致するようにループ応答L(ω)を整形する(S405)ことから開始する。このループ整形が実施されるとき、システム205の周波数応答P(ω)が正確に測定されていることと、コントローラ135が、既知のアーキテクチャを有すること、すなわち、コントローラ135が、フィルタ及び初期フィルタ係数の既知の組を含むこととが仮定される。したがって、ループ整形は、上述したように、L(ω)とL0(ω)との大きさの差等のターゲット応答特性を最小にするようにフィルタ係数を調整することによって実施される。このループ整形を達成することができる方法の異なる例が、図5及び図6に示される。一般に、ループ整形は、CPU、再構成可能ハードウェア、カスタムハードウェア、又は他の計算装置等の自動ループ整形コンポーネントによって実施することができる。
【0042】
ループ応答が整形された後、コントローラ135の利得が、或る設計目標及び/又は所与の頑健性マージンを達成するように調整される(S410)。この利得調整の例は、図9に示され、図9は、以下で更に説明するように、多くのループ整形及び利得調整反復の正味の作用を示す。幾つかの実施形態では、利得は、ループ応答の位相が−180度以下である場合に、ループ応答の大きさが既定の利得マージンより小さくなるように調整される。幾つかの実施形態では、利得は、ループ応答の大きさが1以上である場合に、ループ応答の位相が、既定の位相マージンから180度を引いた値より大きくなるように調整される。一般に、利得調整は、CPU、再構成可能ハードウェア、カスタムハードウェア、又は他の計算装置等の利得調整コンポーネントによって実施することができる。さらに、利得調整は、自動ループ整形と同じ装置によって形成することができる。
【0043】
図5は、代表的な実施形態による図4の方法におけるAFM100のループ応答を整形する方法を示すフローチャートである。上記で示したように、この方法は、周波数応答P(ω)が正確に測定されていることと、コントローラ135が、既知のアーキテクチャを有することとを仮定する。さらに、コントローラ135のフィルタ係数が、初期値に設定されていることが仮定される。図7を参照して以下で説明するように、ループ整形の性能を改善するために、フィルタ係数を知的に初期化する複数の方法が存在する。
【0044】
図5を参照すると、方法は、フィルタ係数の初期の組について周波数応答C(ω)を計算する(S505)ことから開始する。このステップは通常、フィルタを表す、厳密な離散化形態のフィルタの式を使用して実施される。
【0045】
次に、方法は、式L(ω)=P(ω)C(ω)を使用して、結果として得られるループ形状を計算する(S510)。その後、計算されたループ応答L(ω)の大きさが、所望のループ形状に低周波において揃えられ、揃えられた応答L0(ω)が生成される(S515)。換言すれば、求められたループ応答の大きさを所望のループ形状に揃えることは、求められたループ応答の大きさの低周波領域を所望のループ形状の低周波領域において揃えることを含む。この低周波において揃える例は、図8のbの曲線815と820との間で揃えることによって示される。
【0046】
|L(ω)|と|L0(ω)|とを揃えた後、方法は、式δ(ω)=20log10(|L(ω)|/|L0(ω)|)を使用して、|L(ω)|と|L0(ω)|との大きさの差δ(ω)をデシベル(dB)で計算する(S520)。最後に、方法は、コスト関数ε=rms[δ(ω)]を最小にするようにフィルタ係数を調整する(S525)。
【0047】
フィルタ係数を調整するプロセスは、或る反復方法を含む種々の方法で実施することができる。例えば、幾つかの実施形態では、コントローラ135は、複数の4次フィルタとカスケードシーケンスで配列されたPIDを備える。こうした実施形態では、PID及び4次フィルタは、1度に1つ調節することができ、連続して調節された各フィルタは、コントローラ135にすでに含まれている前に調節されたフィルタに追加される。
【0048】
PIDは通常、式I(1/s+P/I+(D/I)s)としてPIDを書き直し、式を離散化し、積分項を、必要とされる頑健性マージンによって後で求められることになる総合利得係数として引出し、その後、コスト関数εを最小にするようにP/I及びD/Iを最適化することによって、調節される。ここで、s=iωであり、P、I、及びDはPID係数である。
【0049】
4次フィルタは、4つの独立パラメータ及び1となるDC利得を有するように選択することができる。さらに、総合利得を1にするスケーリング係数は、例えば2011年2月28日に出願され、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、同一出願人が所有する国際出願第PCT/US11/26555号に記載されているように、レイテンシを最小にするために、他のフィルタセクションからのスケーリング係数によってグループ化することができる。4次フィルタのパラメータは、分子及び分母としてそれぞれ周波数及び品質係数(Q)にマッピングすることができる。コスト関数εが、これらの係数の空間内に多くの極小を有する可能性があるため、また、各4次フィルタが、狭い周波数範囲だけに影響を及ぼす可能性があるため、インテリジェントな初期推測によって各4次フィットを提供することが有利である場合がある。したがって、分子の周波数及び分母の周波数は、例えば図8のcの曲線830によって示すように、大きさの差の曲δ(ω)の顕著な特徴部でシード(seed)することができる。
【0050】
特に、δ(ω)の全てのピーク及び谷が重要であるとは限らないため、4次フィルタは、不十分な整形によりAFMの性能が制限されるような周波数をターゲットにすべきである。一般に、達成可能な帯域幅を制限する2つの方法が存在する。第1に、高周波のピークは、利得が増加する場合、ループ応答を不安定にさせる可能性がある。第2に、位相は、クロスオーバ周波数で利得を制限する可能性がある。より具体的には、システムは、クロスオーバの近くの不十分な整形によって、又は、不可避の非最小位相によって、位相制限される可能性がある。
【0051】
上記制限はともに、|L(ω)|が1に近い場合に発現される傾向がある。さらに、クロスオーバ未満では、|L(ω)|が1より大きい場合、意図される形状からの逸脱は、AFM画像の歪をもたらすことになるため、AFM帯域幅をたとえ制限しなくても、補正もされなければならない。最後に、コントローラ135の出力におけるリンギングを防止するために、閉ループ応答関数T(ω)=L(1+L)−1における大きなピークを回避することが有利である。これらの考慮事項及び他の考慮事項に基づいて、4次フィルタを適切に初期化するための重み付け関数を設計することができる。こうした重み付け関数の1つの例は、式w(ω)=min(|L|,1)|T|2によって提供される。
【0052】
図6は、代表的な実施形態による図5の方法の変形形態を示すフローチャートである。図6の実施形態は、図4の方法におけるAFM100のループ応答を整形するための反復方法S405’である。さらに、方法は、例えば図3に示すように、n個のフィルタを有するコントローラ135によって実施される。
【0053】
図6を参照すると、方法は、コントローラ135において第1のフィルタを選択するためにインデックスi=1に初期化することから開始する(S605)。次に、方法は、i番目のフィルタについてフィルタ係数を初期化する(S610)。PIDフィルタ又は4次フィルタの場合、この初期化は、図5に関して上述したように実施することができる。
【0054】
フィルタ係数が初期化された後、方法は、コントローラ135にi番目のフィルタを追加する(S615)。例えば、第1のフィルタがコントローラ135に追加された後、コントローラは、1つのフィルタのみを有することができるため、コントローラ応答は、そのフィルタの特性によって決まることになる。一方で、続いて、例えば図3に示すように第2のフィルタを第1のフィルタに連続する形式で付加することによって第2のフィルタをコントローラ135に追加することができ、それにより、コントローラ応答は、第1のフィルタと第2のフィルタとの合成特性によって決まる。
【0055】
次に、ループ応答L(ω)は、第1番目〜第i番目のフィルタを有するコントローラ135の周波数応答C(ω)と組合せて、測定された周波数応答P(ω)に基づいて計算される(S620)。その後、コスト関数が、計算されたループ応答に関して計算され(S625)、コスト関数がある目標を満たすかどうかを判定するために、コスト関数が評価される(S630)。この場合、目標は、例えば、第1番目〜第i番目のフィルタを有するコントローラ135についてコスト関数を最小にすることであるとすることができる。コスト関数は、上述したようなε、又は、ループ応答L(ω)とターゲット応答特性との間のある他の類似性メトリックとすることができる。
【0056】
コスト関数が目標を満たす(S630=Yes)場合、方法は、n個のフィルタのそれぞれが、コントローラ135に追加されたかどうかを判定する(S640)。追加されない(S640=No)場合、方法は、インデックスiをインクリメントし、ステップS610に戻る。そうでない(S640=Yes)場合、方法は、図4のステップS410に進む。コスト関数が目標を満たさない(S630=No)場合、i番目のフィルタのフィルタ係数が、例えば或る最適化関数に従って変更される(S635)。換言すれば、ステップS635は、フィルタ係数を更新することを含む。その後、方法は、ステップS620に戻る。
【0057】
図7は、代表的な実施形態による図5及び図6における方法のフィルタ係数を初期化する方法を示すフローチャートである。図7の方法は、例えば、図6のステップS610において4次フィルタのフィルタ係数について初期推測を生成するために使用することができる。
【0058】
図7を参照して、方法は、誤差関数δ(ω)の極大及び極小を特定する(S705)ことから開始する。例えば、極大及び極小は、図8のcの曲線825に示すような誤差関数において特定することができる。
【0059】
次に、方法は、それぞれの最大又は最小の重要度を求めるために重み付け関数w(ω)を計算し(S710)、その後、重み付けされた最も高い誤差w(ω)|δ(ω)|を有するピーク(又は谷)を特定し、それを、最近傍の谷(又はピーク)と対を形成する(S715)。重み付け関数(すなわち、ωの種々の異なる値のそれぞれについての重み)は、図4及び図5に関連して上述したように計算することができる。最後に、方法は、4次フィルタを、その分子及び分母の中心周波数についての初期推測として対形成されたピーク及び谷を使用して調節する(S720)。図8のcの例では、こうした初期推測を有する4次フィルタは、曲線830によって示される。
【0060】
図8のa〜図8のfは、代表的な実施形態による図5〜図7の方法に関連する種々のAFM特性を示すグラフである。便宜上、図8のa〜図8のfのグラフは、図2のAFM100によって生成されたかのように説明される。
【0061】
図8のaでは、曲線805はシステム205の|P(ω)|を表し、曲線810はPIDフィルタのみを有するコントローラ135の|C(ω)|を表す。曲線805に示すように、システム205の周波数応答は、共鳴で満ちている。さらに、コントローラ135内の単一PIDフィルタは、上述したような方法のような方法を使用して最適に調節されるときでも、単純過ぎて、共鳴を相殺することができない。したがって、更なるフィルタが、図8のd〜図8のfによって示すように、これらの共鳴に対処するためにコントローラ135に付加される。
【0062】
図8のbでは、曲線815は、低周波で所望のループ形状に揃えた|L(ω)|を表し、曲線820は、|L0(ω)|、すなわち所望のループ形状の大きさを表す。|L(ω)|は、図8のaに示す2つの曲線の積として計算され、所望のループ形状は、単従な積分器として選択される。この例では、コントローラ135の総合利得は、3dBの必要とされる利得マージンによって150kHzで制限される。換言すれば、コントローラ135の利得は、|L(ω)|が150kHzで0dBに近づくため、AFM100を不安定にすることなく増加することができない。
【0063】
図8のcでは、曲線825は、図8のbの曲線について差関数δ(ω)を表し、曲線830は、差関数δ(ω)に当てはめられた4次フィルタを表す。4次フィルタは、150kHzで制限ピークを補償することができるように、インテリジェントな初期推測によって、その4つの係数をシードし、その後、シードされた係数に対して最適化を実施することによって、曲線825に当てはめられる。上述したように、差関数δ(ω)に当てはめられた4次フィルタは、AFM100の高次共鳴を処理するために、反転し、その後、コントローラ135に追加することができる。
【0064】
図8のdでは、曲線835は、システム205の|P(ω)|を表す。換言すれば、曲線835は、図8のaの曲線805と同じである。曲線840は、コントローラ135の|C(ω)|を表し、PID及び4次フィルタは、図3の場合のように直列に配列される。曲線840についての4次フィルタは、図8のcの(差)曲線825に対応する共鳴を相殺するために、当てはめられた4次フィルタ応答(曲線830)を反転することによって生成されたものである。
【0065】
図8のeでは、曲線845は、図8のdの曲線から導出された|L(ω)|を表し、曲線850は、低周波で曲線845に揃えた|L0(ω)|を表す。曲線850は、図8のbの曲線820と同じ形状及び傾斜を有するが、そのクロスオーバ周波数は、約5kHzだけ増加する。このシフトは、曲線845が、150kHzにおいて、図8のbの曲線815と同じ制限を持たないことによって可能になる。むしろ、4次フィルタの付加は、曲線815と比較して、約20dBだけ曲線845の最大ピークを減少させている。さらに、このシフトは、約3.6倍のコントローラ135の総合利得の増加に相当し、AFM100の帯域幅の大幅な増加を可能にする。図示しないが、図8のeの例では、新しいクロスオーバ周波数は、L(ω)の大きさではなくL(ω)の位相によって制約される。
【0066】
図8のfでは、曲線855は、図8のeの2つの曲線から計算された差関数δ(ω)を表す。この差曲線は、図8のc及び図8のdの4次フィルタを生成するために使用された同じ技法によって別の4次フィルタを生成するために使用することができる。さらに、更なる4次を生成するプロセスは、所定の数のフィルタがコントローラ135について調節されるまで繰り返すことができる。
【0067】
図9は、代表的な実施形態による、調節された複数の4次フィルタがコントローラ135に追加された後のAFM100のループ応答を示すグラフである。この例では、PIDフィルタは、コントローラ135において16個の4次フィルタと結合された。
【0068】
図9では、曲線905は、PIDフィルタ及び16個の4次フィルタのそれぞれが、図4の方法を使用して調節されている|L(ω)|を表し、曲線910は、コントローラ135のPIDフィルタのみが調節されている|L(ω)|を表す。図9が示すように、調節された16個の4次フィルタを付加することで、AFM100のフィードバック帯域幅が約1桁増加する。これは、AFM100の撮像速度を大幅に改善するために使用することができる。
【0069】
図9の4次フィルタは、低周波数でかつクロスオーバ周波数の近くで、所望の積分器応答にループ応答をほぼ一致させたが、応答が小さく、したがって、重要でない高周波数においてループ応答が発散することを可能にすることに留意されたい。総合利得は、60度の位相マージンの要件によって制限されており、システムの負位相は、クロスオーバ周波数を、約12kHz未満に制約する。2011年2月28日に出願された、D. Abramovitch及びC. Moonによる「Multiple Filters in Fixed Point Math」という名称の、国際出願第PCT/US11/26555号に記載されるように、時間遅延を最小にする4次フィルタの使用は、最小の負位相の付加によって、高周波数における複数の共鳴の補償を可能にする。
【0070】
上述したように、コントローラ135は、反復手法又は種々の代替的な手法を使用して調節することができる。或る代替的な手法では、PIDフィルタ及び1つ又は複数の4次フィルタが、同時に再最適化されるか、又は複数の4次フィルタが同時に当てはめられる。さらに、幾つかの代替的な手法では、コントローラ全体が、フィルタの全てを同時に調節することによって設計される。それでも、大きなパラメータ空間内の最適化アルゴリズムは、時間がかかり、浅い極小に陥り易い。したがって、上述したような反復方法のような反復方法は、所与のフィットについて空間を低減するために使用され、制限エリアをターゲットにする効果的な初期推測を可能にすることができる。反復方法の考えられる欠点は、反復方法が、大域的最適を見出すのに失敗する場合があることである。しかし、各フィルタを、一回再調節すること、他のフィルタの存在下でフィルタを再当てはめすること等、この欠点に対処する複数の方法が存在する。
【0071】
カンチレバーアームの高さ信号、すなわちz値に関してフィードバック帯域幅を改善するための幾つかの方法を説明したが、これらの方法は、カンチレバーアームのx値及びy値、交流(AC)振幅、AC周波数、及び先端バイアス信号等の、他の信号に関してフィードバック帯域幅を改善するために適合又は修正することができる。さらに、説明する方法は、フィードバックコントローラ及びフィードフォワードコントローラの両方で使用するように適合することもできる。これらの適合のそれぞれにおいて、コントローラ調整は、所望のループ形状を達成するために行うことができる。さらに、上記方法は、AFMに限定されず、非常に単純なコントローラによって制限される任意のフィードバックシステムを改善するために使用することができる。
【0072】
或る実施形態では、コントローラ135は、再構成可能なハードウェアに実装することができる。例えば、PIDフィルタ及び複数の4次フィルタは、CPU上で得られる調節用パラメータに基づいてFPGA内にプログラミングすることができる。しかし、説明する実施形態は、FPGA又はCPU等の特定の実装形態又はコンポーネントに限定されない。むしろ、説明する実施形態は、説明する機能を実施することが可能な要素を任意の組合せで実装することができる。
【0073】
代表的な実施形態が本明細書で開示されたが、本教示による多くの変形形態が可能であり、また、添付の特許請求の範囲の範囲内に留まることを当業者は認識する。したがって、本発明は、添付の特許請求の範囲の範囲を除いて制限されない。
【符号の説明】
【0074】
100 原子間力顕微鏡(AFM)
105 測定表面
110 アクチュエータ
120 プローブ先端
125 レーザ
130 検出器
135 コントローラ
【特許請求の範囲】
【請求項1】
物理システムと該物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)(100)を調節する方法であって、
前記物理システムの周波数応答及び前記コントローラ(135)の周波数応答に基づいて前記AFM(100)のループ応答を求めるステップと、
前記ループ応答とターゲット応答特性との間の差を示すコスト関数を求めるステップと、
前記差を減少させるように、前記コントローラ(135)の前記周波数応答を調整するステップと、
を含む、原子間力顕微鏡(AFM)を調節する方法。
【請求項2】
前記コントローラ(135)は、それぞれが1つ又は複数のフィルタ係数を特徴とする複数のデジタルフィルタを備え、前記コントローラ(135)の前記周波数応答を調整するステップは、前記デジタルフィルタのうちの1つ又は複数の前記フィルタ係数を更新するステップを含む、請求項1に記載の方法。
【請求項3】
前記複数のデジタルフィルタは、少なくとも1つの比例−積分−微分(PID)フィルタ及び少なくとも1つの4次フィルタを含む、請求項2に記載の方法。
【請求項4】
前記コントローラ(135)の前記周波数応答を調整するステップの後で、前記コントローラ(135)の利得を調整するステップを更に含む、請求項2に記載の方法。
【請求項5】
前記ターゲット応答特性は、所望のループ形状であり、前記コスト関数は、前記ループ応答の大きさと前記所望のループ形状との間の差に基づく、請求項1に記載の方法。
【請求項6】
前記コスト関数は、前記ループ応答の前記大きさと前記所望の形状との間の差の2乗平均平方根である、請求項5に記載の方法。
【請求項7】
前記コントローラ(135)の前記周波数応答を調整するステップは、前記コントローラ(135)に含まれる1つ又は複数の他のフィルタに追加されるフィルタのフィルタ係数の組を決定するステップを含む、請求項1に記載の方法。
【請求項8】
物理システムと該物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)を調節する方法であって、
フィルタ係数の組に基づいて前記コントローラ(135)の周波数応答を求めるステップと、
前記コントローラ(135)の前記求められた周波数応答及び前記物理システムの測定された周波数応答に基づいて前記コントローラ(135)及び前記物理システムのループ応答を求めるステップと、
前記求められたループ応答の大きさを所望のループ形状に揃えるステップと、
前記求められたループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数の値を求めるステップと、
前記誤差関数の前記値を改善するように前記フィルタ係数の前記組を調整するステップと、
を含む、原子間力顕微鏡(AFM)を調節する方法。
【請求項9】
前記コントローラ(135)に追加されるフィルタのフィルタ係数の初期の組を生成するステップであって、
前記誤差関数の極小及び極大を特定するステップと、
前記極小及び前記極大のそれぞれの相対的重要度を求めるための重み付け関数を求めるステップと、
前記重み付け関数に従って、最も高い重みを有する前記極小又は前記極大のうちの一方を特定し、該一方を、最も近い最大又は最小とそれぞれ対を形成するステップと、
前記対を形成した最小及び最大から前記フィルタ係数の前記初期の組を導出するステップと、
を含む、生成するステップ、
を更に含む、請求項8に記載の方法。
【請求項10】
前記コントローラ(135)に追加されるフィルタを生成するステップであって、
前記誤差関数の最大を特定するステップと、
前記特定された最大の周りで、前記誤差関数の一部分に曲線(805)を当てはめるステップと、
前記曲線(805)を反転するステップであって、前記フィルタの応答特性を生成する、反転するステップと、
を含む、生成するステップ、を更に含む、請求項8に記載の方法。
【請求項11】
前記フィルタは4次フィルタである、請求項10に記載の方法。
【請求項12】
前記フィルタ係数の前記組は、少なくとも1つの比例−積分−微分(PID)フィルタ及び少なくとも1つの4次フィルタに相当する、請求項8に記載の方法。
【請求項13】
前記ループ応答の利得又は位相マージンに基づいて前記コントローラ(135)の利得を調整するステップを更に含む、請求項8に記載の方法。
【請求項14】
前記求められたループ応答の前記大きさを所望のループ形状に揃えるステップは、前記求められたループ応答の前記大きさの低周波領域を、前記所望のループ形状の低周波領域に揃えるステップを含む、請求項8に記載の方法。
【請求項15】
物理システム(205)と、複数のデジタルフィルタを備えて前記物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)(100)を調節するシステム(205)であって、該システム(205)は、
前記物理システムの周波数応答及び前記コントローラ(135)の周波数応答によって規定されるループ応答に対して自動ループ整形を実施するループ整形コンポーネントと、
前記ループ応答の極大の大きさに従って前記コントローラ(135)の利得を調整する利得調整コンポーネントと、
を備えるシステム。
【請求項16】
システム(205)であって、前記ループ整形コンポーネントは、フィルタのフィルタ係数の組を初期化し、該フィルタを、前記コントローラ(135)にすでに含まれる少なくとも1つの他のフィルタに追加し、前記コントローラ(135)が該追加されたフィルタを有する状態で前記ループ応答を求め、前記ループ応答の所望のループ形状に関して前記フィルタ係数の前記組を最適化する、請求項15に記載のシステム。
【請求項17】
前記フィルタは4次フィルタであり、前記少なくとも1つの他のフィルタは、比例−積分−微分(PID)フィルタを含む、請求項16に記載のシステム(205)。
【請求項18】
前記利得調整コンポーネントは、前記ループ応答の位相が、−180度以下である場合に、前記ループ応答の大きさが、既定の利得マージンより小さくなるように前記コントローラ(135)の前記利得を調整する、請求項15に記載のシステム(205)。
【請求項19】
前記利得調整コンポーネントは、前記ループ応答の大きさが、1以上である場合に、前記ループ応答の位相が、既定の位相マージンから180度引いた値より大きくなるように前記コントローラ(135)の前記利得を調整する、請求項15に記載のシステム(205)。
【請求項20】
前記ループ整形コンポーネントは、前記ループ応答の大きさを所望のループ形状に揃え、前記ループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数を求め、前記誤差関数を減少させるように前記フィルタ係数の前記組を調整することによって前記フィルタ係数の前記組を最適化する、請求項16に記載のシステム(205)。
【請求項1】
物理システムと該物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)(100)を調節する方法であって、
前記物理システムの周波数応答及び前記コントローラ(135)の周波数応答に基づいて前記AFM(100)のループ応答を求めるステップと、
前記ループ応答とターゲット応答特性との間の差を示すコスト関数を求めるステップと、
前記差を減少させるように、前記コントローラ(135)の前記周波数応答を調整するステップと、
を含む、原子間力顕微鏡(AFM)を調節する方法。
【請求項2】
前記コントローラ(135)は、それぞれが1つ又は複数のフィルタ係数を特徴とする複数のデジタルフィルタを備え、前記コントローラ(135)の前記周波数応答を調整するステップは、前記デジタルフィルタのうちの1つ又は複数の前記フィルタ係数を更新するステップを含む、請求項1に記載の方法。
【請求項3】
前記複数のデジタルフィルタは、少なくとも1つの比例−積分−微分(PID)フィルタ及び少なくとも1つの4次フィルタを含む、請求項2に記載の方法。
【請求項4】
前記コントローラ(135)の前記周波数応答を調整するステップの後で、前記コントローラ(135)の利得を調整するステップを更に含む、請求項2に記載の方法。
【請求項5】
前記ターゲット応答特性は、所望のループ形状であり、前記コスト関数は、前記ループ応答の大きさと前記所望のループ形状との間の差に基づく、請求項1に記載の方法。
【請求項6】
前記コスト関数は、前記ループ応答の前記大きさと前記所望の形状との間の差の2乗平均平方根である、請求項5に記載の方法。
【請求項7】
前記コントローラ(135)の前記周波数応答を調整するステップは、前記コントローラ(135)に含まれる1つ又は複数の他のフィルタに追加されるフィルタのフィルタ係数の組を決定するステップを含む、請求項1に記載の方法。
【請求項8】
物理システムと該物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)を調節する方法であって、
フィルタ係数の組に基づいて前記コントローラ(135)の周波数応答を求めるステップと、
前記コントローラ(135)の前記求められた周波数応答及び前記物理システムの測定された周波数応答に基づいて前記コントローラ(135)及び前記物理システムのループ応答を求めるステップと、
前記求められたループ応答の大きさを所望のループ形状に揃えるステップと、
前記求められたループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数の値を求めるステップと、
前記誤差関数の前記値を改善するように前記フィルタ係数の前記組を調整するステップと、
を含む、原子間力顕微鏡(AFM)を調節する方法。
【請求項9】
前記コントローラ(135)に追加されるフィルタのフィルタ係数の初期の組を生成するステップであって、
前記誤差関数の極小及び極大を特定するステップと、
前記極小及び前記極大のそれぞれの相対的重要度を求めるための重み付け関数を求めるステップと、
前記重み付け関数に従って、最も高い重みを有する前記極小又は前記極大のうちの一方を特定し、該一方を、最も近い最大又は最小とそれぞれ対を形成するステップと、
前記対を形成した最小及び最大から前記フィルタ係数の前記初期の組を導出するステップと、
を含む、生成するステップ、
を更に含む、請求項8に記載の方法。
【請求項10】
前記コントローラ(135)に追加されるフィルタを生成するステップであって、
前記誤差関数の最大を特定するステップと、
前記特定された最大の周りで、前記誤差関数の一部分に曲線(805)を当てはめるステップと、
前記曲線(805)を反転するステップであって、前記フィルタの応答特性を生成する、反転するステップと、
を含む、生成するステップ、を更に含む、請求項8に記載の方法。
【請求項11】
前記フィルタは4次フィルタである、請求項10に記載の方法。
【請求項12】
前記フィルタ係数の前記組は、少なくとも1つの比例−積分−微分(PID)フィルタ及び少なくとも1つの4次フィルタに相当する、請求項8に記載の方法。
【請求項13】
前記ループ応答の利得又は位相マージンに基づいて前記コントローラ(135)の利得を調整するステップを更に含む、請求項8に記載の方法。
【請求項14】
前記求められたループ応答の前記大きさを所望のループ形状に揃えるステップは、前記求められたループ応答の前記大きさの低周波領域を、前記所望のループ形状の低周波領域に揃えるステップを含む、請求項8に記載の方法。
【請求項15】
物理システム(205)と、複数のデジタルフィルタを備えて前記物理システムを制御するように構成されたコントローラ(135)とを備える原子間力顕微鏡(AFM)(100)を調節するシステム(205)であって、該システム(205)は、
前記物理システムの周波数応答及び前記コントローラ(135)の周波数応答によって規定されるループ応答に対して自動ループ整形を実施するループ整形コンポーネントと、
前記ループ応答の極大の大きさに従って前記コントローラ(135)の利得を調整する利得調整コンポーネントと、
を備えるシステム。
【請求項16】
システム(205)であって、前記ループ整形コンポーネントは、フィルタのフィルタ係数の組を初期化し、該フィルタを、前記コントローラ(135)にすでに含まれる少なくとも1つの他のフィルタに追加し、前記コントローラ(135)が該追加されたフィルタを有する状態で前記ループ応答を求め、前記ループ応答の所望のループ形状に関して前記フィルタ係数の前記組を最適化する、請求項15に記載のシステム。
【請求項17】
前記フィルタは4次フィルタであり、前記少なくとも1つの他のフィルタは、比例−積分−微分(PID)フィルタを含む、請求項16に記載のシステム(205)。
【請求項18】
前記利得調整コンポーネントは、前記ループ応答の位相が、−180度以下である場合に、前記ループ応答の大きさが、既定の利得マージンより小さくなるように前記コントローラ(135)の前記利得を調整する、請求項15に記載のシステム(205)。
【請求項19】
前記利得調整コンポーネントは、前記ループ応答の大きさが、1以上である場合に、前記ループ応答の位相が、既定の位相マージンから180度引いた値より大きくなるように前記コントローラ(135)の前記利得を調整する、請求項15に記載のシステム(205)。
【請求項20】
前記ループ整形コンポーネントは、前記ループ応答の大きさを所望のループ形状に揃え、前記ループ応答の前記揃えた大きさと前記所望のループ形状との間の誤差関数を求め、前記誤差関数を減少させるように前記フィルタ係数の前記組を調整することによって前記フィルタ係数の前記組を最適化する、請求項16に記載のシステム(205)。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−96986(P2013−96986A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−205898(P2012−205898)
【出願日】平成24年9月19日(2012.9.19)
【出願人】(399117121)アジレント・テクノロジーズ・インク (710)
【氏名又は名称原語表記】AGILENT TECHNOLOGIES, INC.
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成24年9月19日(2012.9.19)
【出願人】(399117121)アジレント・テクノロジーズ・インク (710)
【氏名又は名称原語表記】AGILENT TECHNOLOGIES, INC.
[ Back to top ]