
原子間力顕微鏡
【課題】剛性のない被測定物の形状を高精度に測定できる原子間力顕微鏡を提供する。
【解決手段】原子間力顕微鏡100は、先端に探針142を有するカンチレバー130と、カンチレバー130を支持する支持部110と、カンチレバー130に振動を与える振動発生部120とを備えている。カンチレバー130は、基端側に位置する基端側部132と、探針側に位置する探針側部136とを有している。探針側部136は基端側部132から屈折して延びている。基端側部132と探針側部136は、一方が他方に対して整数倍の固有振動数を有している。
【解決手段】原子間力顕微鏡100は、先端に探針142を有するカンチレバー130と、カンチレバー130を支持する支持部110と、カンチレバー130に振動を与える振動発生部120とを備えている。カンチレバー130は、基端側に位置する基端側部132と、探針側に位置する探針側部136とを有している。探針側部136は基端側部132から屈折して延びている。基端側部132と探針側部136は、一方が他方に対して整数倍の固有振動数を有している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、原子間力顕微鏡に関する。
【背景技術】
【0002】
探針と被測定物に一方向の相対的な振動を与えて測定する原子間力顕微鏡が知られている。このような原子間力顕微鏡では、感知される接触圧力(探針と被測定物の間に作用する力)が被測定物の表面の傾斜角度に依存する。たとえば、探針と被測定物が縦方向に相対的に振動している場合、被測定物の表面が平らに近い部分すなわち表面に立てた法線が縦方向に対してなす角度が小さい部分では、接触圧力は縦方向成分が大きく横方向成分が小さいので、感知される接触圧力は探針と被測定物の間に働く実際の接触圧力に近いが、被測定物の表面が急な部分すなわち表面に立てた法線が縦方向に対してなす角度が大きい部分では、接触圧力は縦方向成分が小さく横方向成分が大きいので、感知される接触圧力は探針と被測定物の間に働く実際の接触圧力よりもはるかに小さい。このため、急な表面部分をもつ被測定物を高精度に測定することは難しい。
【0003】
特開平7−134023号公報は、被測定物を載せているステージを縦方向と横方向を振動させて、探針と被測定物の間に円運動を発生させる原子間力顕微鏡を開示している。この原子間力顕微鏡では、感知される接触圧力は被測定物の表面の傾斜角度に依存しない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−134023号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の原子間力顕徴鏡は、被測定物を載せているステージを縦方向と横方向を振動させているため、細胞などの剛性のない被測定物は振動によって各部が容易に移動してしまうので、剛性のない被測定物を測定することは難しい。また、真直度などのステージの精度の低下を引き起こしてしまう。
【0006】
本発明は、剛性のない被測定物の形状を高精度に測定できる原子間力顕微鏡を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明による原子間力顕微鏡は、先端に探針を有するカンチレバーと、前記カンチレバーを支持する支持部と、前記カンチレバーに振動を与える振動発生部と、前記カンチレバーの変位を検出する変位検出系とを備えている。前記カンチレバーは、基端側に位置する基端側部と、前記基端側部から屈折して延びている探針側に位置する探針側部とを有している。前記基端側部と前記探針側部は、一方が他方に対して整数倍の固有振動数を有している。
【発明の効果】
【0008】
本発明によれば、剛性のない被測定物の形状を高精度に測定できる原子間力顕微鏡が提供される。
【図面の簡単な説明】
【0009】
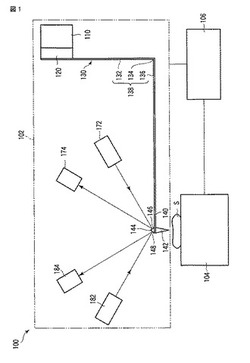
【図1】本発明の第1実施形態による原子間力顕微鏡の全体構成を示している。
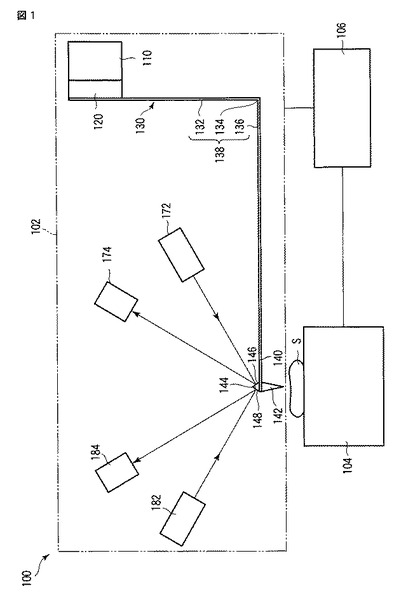
【図2】図1に示されるカンチレバーとその周辺部材を探針側から見た平面図である。
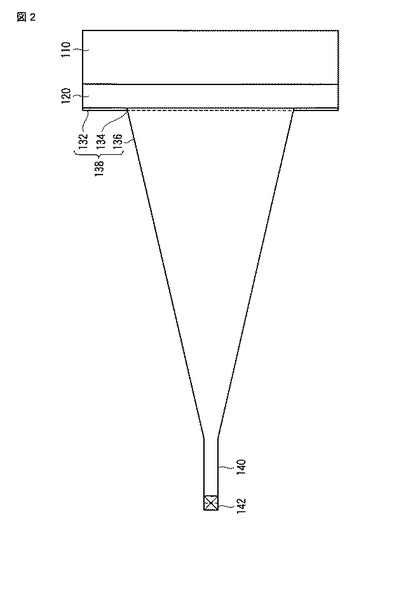
【図3】本発明の第2実施形態による原子間力顕微鏡の全体構成を示している。
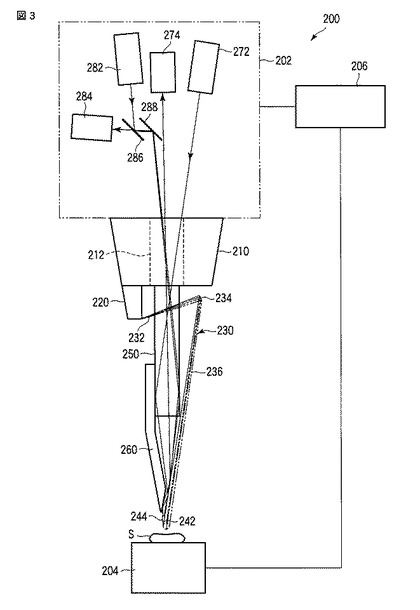
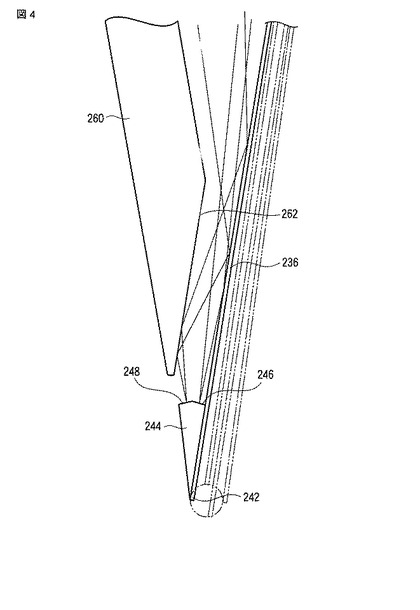
【図4】図3に示されるカンチレバーの先端部周辺を拡大して示している。
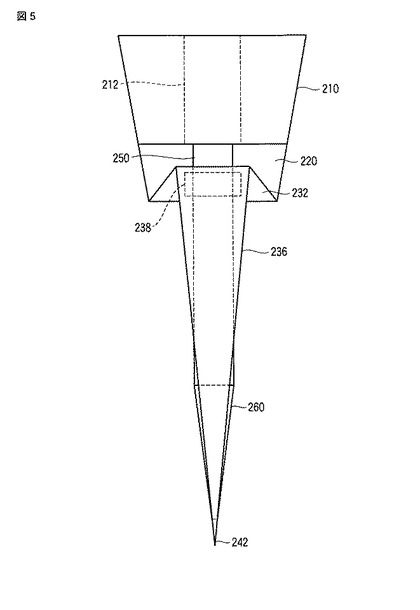
【図5】図3に示されるカンチレバーとその周辺部材を図3の右側から見た正面図である。
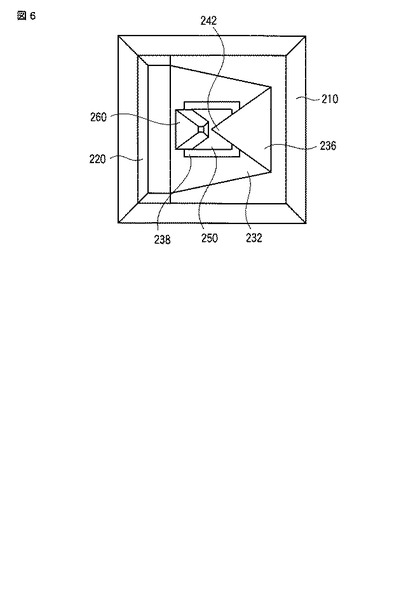
【図6】図3に示されるカンチレバーとその周辺部材を探針側から見た平面図である。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら本発明の実施形態について説明する。
【0011】
<第一実施形態>
図1に示すように、原子間力顕微鏡100は、先端に探針142を有するカンチレバー130と、カンチレバー130を支持する支持部110と、カンチレバー130に振動を与える振動発生部120とを備えている。
【0012】
カンチレバー130は、平板状で、基端と先端の間に屈折部134を有し、そこでほぼ直角に折り曲がっている。この屈折部134よりも基端側の部分を基端側部132とし、屈折部134よりも探針側の部分を探針側部136とする。言い換えれば、カンチレバー130は、基端側に位置する基端側部132と、探針側に位置する探針側部136とを有し、探針側部136は基端側部132から直角に屈折して延びている。基端側部132と探針側部136は、一方が他方に対して整数倍の固有振動数を有している。たとえば、基端側部132と探針側部136は等しい固有振動数を有している。たとえば、探針側部136は基端側部132に比べて幅が狭く長さが長く構成されている。
【0013】
カンチレバー130は、図2から分かるように、等角台形形状の基部138と、基部138の短い側の底の中央から突出している長方形形状の突出部140とを有している。
基部138は、基端側部132と探針側部136、および屈折部134を含み、仮に屈折部134を平らに拡げた状態で、平面視すると、等角台形形状となっている。ここで等角台形とは、底の両側の角が等しい台形を言う。つまり等角台形は、一組の対辺が平行であり、別の一組の対辺の長さが等しく、対角の和が180度である四辺形である。等角台形はたとえば、ニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である。なお等角台形は長方形を含み得る。
そして、突出部140の先端に四角錐状の探針142が取り付けられている。
【0014】
図1に示すように、振動発生部120は支持部110に固定され、カンチレバー130は基端側部132が振動発生部120に固定されている。
カンチレバー130の基部138が、ニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である等角台形形状の場合には、振動発生部120へ固定される部分の幅が探針側部136より広くなり、カンチレバー130のねじれが少なくなる。
【0015】
カンチレバー130は、探針142の近くに、たとえば探針142の反対側に、反射部144を有している。反射部144は、複数たとえば2つの反射面146,148を有している。2つの反射面146,148はたとえば直交している。反射面146は基端側部132を向いており、反射面148はその反対側を向いている。
【0016】
原子間力顕微鏡100はまた、探針142の変位を検出する光テコ方式の変位検出系として、反射面146,148に照射される光をそれぞれ射出する複数たとえば2つの光源172,182と、反射面146,148からの反射光をそれぞれ感知する複数たとえば2つの光センサ174,184とを有している。光源172,182から射出された光はそれぞれ反射面146,148に直接照射される。
【0017】
光源172,182はたとえば半導体レーザーで構成される。光源172,182が照射する光の波長はたとえばそれぞれ異なっている。しかしそれらは同じであってもよい。
【0018】
光センサ174,184は、光ビームの入射位置の変化すなわちビームスポットの移動を反映した信号を出力する。光センサ174,184は、たとえば2分割フォトダイオードで構成される。この場合、光ビームの入射位置の変化を反映した信号は、2つの受光部の出力の差信号で得られる。光センサ174,184はまた、位置検出素子(PSD)で構成されてもよい。
【0019】
支持部110と光源172,182と光センサ174,184はヘッド102に保持されている。
【0020】
被測定物Sは、XYZステージ104に載置され、探針142の下方に配置される。XYZステージ104は、探針142と被測定物Sを互いに近づけたり遠ざけたりするために探針142と被測定物Sを相対的にZ軸に沿って移動させるZ走査機能と、Z軸に直交するX軸に沿って探針142と被測定物Sを相対的に移動させるX走査機能と、Z軸とX軸に直交するY軸に沿って探針142と被測定物Sを相対的に移動させるY走査機能とを有している。X走査機能とY走査機能とZ走査機能は、適宜、ヘッド102の側に分散されてもよい。つまり、被測定物Sを移動させる代わりにヘッド102を移動させる構成としてもよい。
【0021】
原子間力顕微鏡100はまた、装置全体を制御するコントローラ106を有している。コントローラ106は、振動発生部120、光源172,182の駆動、光センサ174,184と共働したXYZステージ104の制御、被測定物Sの測定画像の構築、構築画像の表示や保存、保存画像の読み出しなどをおこなう。
【0022】
このような構成の原子間力顕微鏡100において、振動発生部120はカンチレバー130を振動させる。カンチレバー130の基端側部132と探針側部136は互いにほぼ直交する方向に振動する。基端側部132探針側部136は、一方が他方に対して整数倍の固有振動数を有しているため、ほぼ等しい角振動数で振動する。その結果、探針142が擬似的な円運動をおこなう。
【0023】
図1において、光源172から射出された光ビームは、反射部144の反射面146で反射され、光センサ174に入射する。また、光源182から射出された光ビームは、反射部144の反射面148で反射され、光センサ184に入射する。探針142が被測定物Sから受ける力に応じてカンチレバー130の先端が変位し、これに応じて反射部144の反射面146,148の向きが変化する。その結果、光センサ174,184へ入射する光ビームの位置が変化する。光センサ174,184は、この光ビームの入射位置の変化を反映した信号を出力する。
【0024】
コントローラ106は、XYZステージ104を制御して、探針142と被測定物SをX軸とY軸に沿って相対的に移動させるXY走査をおこないながら光センサ174,184の出力信号を一定に保つように探針142と被測定物SをZ軸に沿って相対的に移動させるZ走査をおこない(Zサーボをかけ)、XYZステージ104の制御情報から被測定物Sの測定画像を構築する。
【0025】
本実施形態の原子間力顕微鏡100では、探針142が円運動をおこなうので、変位検出系によって感知される接触圧力すなわち探針142と被測定物Sの間に作用する力は被測定物の表面の傾斜角度に依存しない。このため、XY走査のあいだ探針142と被測定物Sの間の距離が被測定物の表面の傾斜角度によらずに一定に保たれる。また、探針142の円運動のためにカンチレバー130自体が振動されるので、被測定物Sを載せいているXYZステージ104の精度の低下や被測定物Sの各部の移動が起こらない。このため、剛性のない被測定物Sの形状測定を高精度におこなうことができる。
【0026】
<第二実施形態>
図3に示すように、原子間力顕微鏡200は、カンチレバー230と、カンチレバー230を支持する支持部210と、カンチレバー230に振動を与える振動発生部220とを備えている。
【0027】
カンチレバー230は、平板状で、基端と先端の間に屈折部234を有し、そこで鋭角に折り曲がっている。この屈折部234よりも基端側の部分を基端側部232とし、屈折部234よりも探針側の部分を探針側部236とする。言い換えれば、カンチレバー230は、基端側に位置する基端側部232と、探針側に位置する探針側部236とを有し、探針側部236は基端側部232から鋭角に屈折して延びている。基端側部232と探針側部236は、一方が他方に対して整数倍の固有振動数を有している。たとえば、基端側部232と探針側部236は等しい固有振動数を有している。たとえば、探針側部236は基端側部232に比べて幅が狭く長さが長く構成されている。
【0028】
カンチレバー230は、図5と図6から分かるように、平面視で、つまり平らに拡げた状態で、二等辺三角形形状をしており、その先端が探針242と機能する。つまり、カンチレバー230は先端に探針242を有し、探針242は探針側部236に平行に延びている。
なお、カンチレバー230は、等角台形形状でもよく、その場合には、探針側部236の側の底の中央部に、探針側部236と平行に、カンチレバー230の先端側に向けられた探針が設けられる。突出部が設けられてさらにその先端に探針が配置されてもよい。
【0029】
図3に示すように、振動発生部220は支持部210に固定され、カンチレバー230は基端側部232が振動発生部220に固定されている。支持部210は四角錐台形状をしており、小さい側の底面の端部に振動発生部220が固定されている。振動発生部220は一辺にわたって延び、振動発生部220の側面は支持部210の傾斜側面と同一面上に位置している。振動発生部220は、これに限らないが、たとえば圧電素子で構成される。
なお、カンチレバー230が二等辺三角形形状、またはニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である等角台形形状の場合には、振動発生部220へ固定される部分の幅が探針側部236より広くなり、カンチレバー230のねじれが少なくなる。
【0030】
カンチレバー230は、探針242の近くに、反射部244を有している。図4に示すように、反射部244は、複数たとえば2つの反射面246,248を有している。反射面246は基端側部232を向いており、反射面248はその反対側を向いている。
【0031】
図3に示すように、原子間力顕微鏡200はまた、探針242の変位を検出する光テコ方式の変位検出系として、反射面246,248に照射される光をそれぞれ射出する2つの光源272,282と、反射面246,248からの反射光をそれぞれ感知する2つの光センサ274,284とを有している。
【0032】
光源272,282はたとえば半導体レーザーで構成される。光源272,282が照射する光の波長は干渉を避けるためそれぞれ異なっている。
【0033】
光センサ274,284は、光ビームの入射位置の変化すなわちビームスポットの移動を反映した信号を出力する。光センサ274,284は、たとえば2分割フォトダイオードや位置検出素子(PSD)で構成される。
【0034】
光源272,282から射出された光を反射部244の反射面246,248へ導くため、支持部210は、光の通過を許す透光部212を有し、カンチレバー230の基端側部232は、光の通過を許す透光部238を有し、また原子間力顕微鏡200は、支持部210に支持された光ガイド部250と、光ガイド部250に支持された反射部材260を備えている。
【0035】
カンチレバー230の基端側部232の透光部238は貫通穴で構成されている。光ガイド部250は、カンチレバー230の基端側部232の透光部238を通って延びている。光ガイド部250は、たとえば、外側の側面に反射コートが施された四角柱形状の石英部材で構成される。
【0036】
図4に示すように、反射部材260は、カンチレバー230に対向する反射面262を有している。カンチレバー230は、反射部材260の反射面262に対向する面に反射面を有している。
【0037】
原子間力顕微鏡200はまた、図3に示すように、光源282から光センサ284へ至る光路を折り曲げるためのミラー288と、光源282から射出される光と光センサ284へ向かう光とを分離するためのハーフミラー286とを備えている。
【0038】
カンチレバー230は、図3に示すように、探針242を下にして配置されたとき、図6に示すように、水平面への投影において支持部210の内側に位置している。
【0039】
支持部210と光源272,282と光センサ274,284とハーフミラー286とミラー288はヘッド202に保持されている。
【0040】
被測定物Sは、XYZステージ204に載置され、探針242の下方に配置される。XYZステージ204は、探針242と被測定物Sを互いに近づけたり遠ざけたりするために探針242と被測定物Sを相対的にZ軸に沿って移動させるZ走査機能と、Z軸に直交するX軸に沿って探針242と被測定物Sを相対的に移動させるX走査機能と、Z軸とX軸に直交するY軸に沿って探針242と被測定物Sを相対的に移動させるY走査機能とを有している。X走査機能とY走査機能とZ走査機能は、適宜、ヘッド202の側に分散されてもよい。
【0041】
原子間力顕微鏡200はまた、装置全体を制御するコントローラ206を有している。コントローラ206は、振動発生部220、光源272,282の駆動、光センサ274,284と共働したXYZステージ204の制御、被測定物Sの測定画像の構築、構築画像の表示や保存、保存画像の読み出しなどをおこなう。
【0042】
このような構成の原子間力顕微鏡200において、振動発生部220はカンチレバー230を振動させる。カンチレバー230の基端側部232と探針側部236は互いに異なる方向に振動する。基端側部232探針側部236は、一方が他方に対して整数倍の固有振動数を有しているため、ほぼ等しい角振動数で振動する。その結果、探針242が擬似的な円運動をおこなう。言い換えれば、カンチレバー230は、振動発生部220によって振動されたときに探針242が擬似的な円運動をおこなうように設計されている。
【0043】
図3と図4において、光源272から射出された光ビームは、支持部210の透光部212を通って光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、カンチレバー230の探針側部236と反射部材260の反射面262で順に反射されて反射部244の反射面246へ向かう。その後、光ビームは、反射部244の反射面246で反射され、反射部材260の反射面262とカンチレバー230の探針側部236とで順に反射され、光ガイド部250と支持部210の透光部212を通って光センサ274に入射する。
【0044】
また、光源282から射出された光ビームは、ハーフミラー286に入射し、その一部が反射される。ハーフミラー286で反射された光ビームは、ミラー288で反射され、支持部210の透光部212を通って光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、カンチレバー230の探針側部236で反射されて反射部244の反射面248へ向かう。その後、光ビームは、反射部244の反射面248で反射され、カンチレバー230の探針側部236で反射されて光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、支持部210の透光部212を通り、ミラー288で反射され、ハーフミラー286に入射し、その一部が透過する。ハーフミラー286で反射された光ビームは光センサ284に入射する。
【0045】
このように、光源272,282からの光は、支持部210の透光部212と(支持部210の透光部212と)光ガイド部250の通過と、反射部材260とカンチレバー230と反射部244による反射とを経て、光センサ274,284に到達する。
【0046】
探針242が被測定物Sから受ける力に応じてカンチレバー230の先端が変位し、これに応じて反射部244の反射面246,248の向きが変化する。その結果、光センサ274,284へ入射する光ビームの位置が変化する。光センサ274,284は、この光ビームの入射位置の変化を反映した信号を出力する。
【0047】
コントローラ206は、XYZステージ204を制御して、探針242と被測定物SをX軸とY軸に沿って相対的に移動させるXY走査をおこないながら光センサ274,284の出力信号を一定に保つように探針242と被測定物SをZ軸に沿って相対的に移動させるZ走査をおこない(Zサーボをかけ)、XYZステージ204の制御情報から被測定物Sの測定画像を構築する。
【0048】
本実施形態の原子間力顕微鏡200では、探針242が円運動をおこなうので、変位検出系によって感知される接触圧力すなわち探針242と被測定物Sの間に作用する力は被測定物の表面の傾斜角度に依存しない。このため、XY走査のあいだ探針242と被測定物Sの間の距離が被測定物の表面の傾斜角度によらずに一定に保たれる。また、探針242の円運動のためにカンチレバー230自体が振動されるので、被測定物Sを載せいているXYZステージ204の精度の低下や被測定物Sの各部の移動が起こらない。このため、剛性のない被測定物Sの形状測定を高精度におこなうことができる。
【0049】
また原子間力顕微鏡200は、探針242が探針側部236に平行に延びており、さらに水平面への投影においてカンチレバー230が支持部210の内側に位置しているので、探針242の周囲の空間が空いている。このため本実施形態の原子間力顕微鏡200は、その表面が全体的に大きく湾曲している被測定物をも高精度に測定し得る。
【0050】
本実施形態において、変位検出系は、図3の構成に限らず、適宜変更されてよい。たとえば、反射部244の反射面246,248の向きを互いに内側に傾斜するように変更し、光ガイド部250と反射部材260を適宜省いた構成としてもよい。
これまで、図面を参照しながら本発明の実施形態を述べたが、本発明は、これらの実施形態に限定されるものではなく、その要旨を逸脱しない範囲において様々な変形や変更が施されてもよい。
【0051】
光源と光センサの位置関係は逆であってもよい。
【0052】
反射部の反射面の数は2つに限らず3つ以上であってもよい。
【0053】
探針の変位検出系は、光テコ方式のものに限らず、歪みゲージ方式や静電容量方式など、他の方式のもので構成されてもよい。
【0054】
カンチレバーの屈折部の数は1つに限らず2つ以上であってもよい。また、カンチレバーの折り曲がり角度は直角または鋭角に限らず鈍角であってもよい。
【0055】
探針の運動は円運動に限らず他の運動であってもよい。たとえば逆V字形の運動であってもよい。この場合、逆V字の2つの下端位置で力が感知される。
【0056】
光源は半導体レーザー限らず他の発光素子で構成されてもよく、また光ファイバなどの導光部材をさらに有する構成としてもよい。
【符号の説明】
【0057】
100…原子間力顕微鏡、102…ヘッド、104…XYZステージ、106…コントローラ、110…支持部、120…振動発生部、130…カンチレバー、132…基端側部、134…屈折部、136…探針側部、138…基部、140…突出部、142…探針、144…反射部、146…反射面、148…反射面、172…光源、174…光センサ、182…光源、184…光センサ、200…原子間力顕微鏡、202…ヘッド、204…XYZステージ、206…コントローラ、210…支持部、212…透光部、220…振動発生部、230…カンチレバー、232…基端側部、234…屈折部、236…探針側部、238…透光部、242…探針、244…反射部、246…反射面、248…反射面、250…光ガイド部、260…反射部材、262…反射面、272…光源、274…光センサ、282…光源、284…光センサ、286…ハーフミラー、288…ミラー。
【技術分野】
【0001】
本発明は、原子間力顕微鏡に関する。
【背景技術】
【0002】
探針と被測定物に一方向の相対的な振動を与えて測定する原子間力顕微鏡が知られている。このような原子間力顕微鏡では、感知される接触圧力(探針と被測定物の間に作用する力)が被測定物の表面の傾斜角度に依存する。たとえば、探針と被測定物が縦方向に相対的に振動している場合、被測定物の表面が平らに近い部分すなわち表面に立てた法線が縦方向に対してなす角度が小さい部分では、接触圧力は縦方向成分が大きく横方向成分が小さいので、感知される接触圧力は探針と被測定物の間に働く実際の接触圧力に近いが、被測定物の表面が急な部分すなわち表面に立てた法線が縦方向に対してなす角度が大きい部分では、接触圧力は縦方向成分が小さく横方向成分が大きいので、感知される接触圧力は探針と被測定物の間に働く実際の接触圧力よりもはるかに小さい。このため、急な表面部分をもつ被測定物を高精度に測定することは難しい。
【0003】
特開平7−134023号公報は、被測定物を載せているステージを縦方向と横方向を振動させて、探針と被測定物の間に円運動を発生させる原子間力顕微鏡を開示している。この原子間力顕微鏡では、感知される接触圧力は被測定物の表面の傾斜角度に依存しない。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平7−134023号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の原子間力顕徴鏡は、被測定物を載せているステージを縦方向と横方向を振動させているため、細胞などの剛性のない被測定物は振動によって各部が容易に移動してしまうので、剛性のない被測定物を測定することは難しい。また、真直度などのステージの精度の低下を引き起こしてしまう。
【0006】
本発明は、剛性のない被測定物の形状を高精度に測定できる原子間力顕微鏡を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明による原子間力顕微鏡は、先端に探針を有するカンチレバーと、前記カンチレバーを支持する支持部と、前記カンチレバーに振動を与える振動発生部と、前記カンチレバーの変位を検出する変位検出系とを備えている。前記カンチレバーは、基端側に位置する基端側部と、前記基端側部から屈折して延びている探針側に位置する探針側部とを有している。前記基端側部と前記探針側部は、一方が他方に対して整数倍の固有振動数を有している。
【発明の効果】
【0008】
本発明によれば、剛性のない被測定物の形状を高精度に測定できる原子間力顕微鏡が提供される。
【図面の簡単な説明】
【0009】
【図1】本発明の第1実施形態による原子間力顕微鏡の全体構成を示している。
【図2】図1に示されるカンチレバーとその周辺部材を探針側から見た平面図である。
【図3】本発明の第2実施形態による原子間力顕微鏡の全体構成を示している。
【図4】図3に示されるカンチレバーの先端部周辺を拡大して示している。
【図5】図3に示されるカンチレバーとその周辺部材を図3の右側から見た正面図である。
【図6】図3に示されるカンチレバーとその周辺部材を探針側から見た平面図である。
【発明を実施するための形態】
【0010】
以下、図面を参照しながら本発明の実施形態について説明する。
【0011】
<第一実施形態>
図1に示すように、原子間力顕微鏡100は、先端に探針142を有するカンチレバー130と、カンチレバー130を支持する支持部110と、カンチレバー130に振動を与える振動発生部120とを備えている。
【0012】
カンチレバー130は、平板状で、基端と先端の間に屈折部134を有し、そこでほぼ直角に折り曲がっている。この屈折部134よりも基端側の部分を基端側部132とし、屈折部134よりも探針側の部分を探針側部136とする。言い換えれば、カンチレバー130は、基端側に位置する基端側部132と、探針側に位置する探針側部136とを有し、探針側部136は基端側部132から直角に屈折して延びている。基端側部132と探針側部136は、一方が他方に対して整数倍の固有振動数を有している。たとえば、基端側部132と探針側部136は等しい固有振動数を有している。たとえば、探針側部136は基端側部132に比べて幅が狭く長さが長く構成されている。
【0013】
カンチレバー130は、図2から分かるように、等角台形形状の基部138と、基部138の短い側の底の中央から突出している長方形形状の突出部140とを有している。
基部138は、基端側部132と探針側部136、および屈折部134を含み、仮に屈折部134を平らに拡げた状態で、平面視すると、等角台形形状となっている。ここで等角台形とは、底の両側の角が等しい台形を言う。つまり等角台形は、一組の対辺が平行であり、別の一組の対辺の長さが等しく、対角の和が180度である四辺形である。等角台形はたとえば、ニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である。なお等角台形は長方形を含み得る。
そして、突出部140の先端に四角錐状の探針142が取り付けられている。
【0014】
図1に示すように、振動発生部120は支持部110に固定され、カンチレバー130は基端側部132が振動発生部120に固定されている。
カンチレバー130の基部138が、ニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である等角台形形状の場合には、振動発生部120へ固定される部分の幅が探針側部136より広くなり、カンチレバー130のねじれが少なくなる。
【0015】
カンチレバー130は、探針142の近くに、たとえば探針142の反対側に、反射部144を有している。反射部144は、複数たとえば2つの反射面146,148を有している。2つの反射面146,148はたとえば直交している。反射面146は基端側部132を向いており、反射面148はその反対側を向いている。
【0016】
原子間力顕微鏡100はまた、探針142の変位を検出する光テコ方式の変位検出系として、反射面146,148に照射される光をそれぞれ射出する複数たとえば2つの光源172,182と、反射面146,148からの反射光をそれぞれ感知する複数たとえば2つの光センサ174,184とを有している。光源172,182から射出された光はそれぞれ反射面146,148に直接照射される。
【0017】
光源172,182はたとえば半導体レーザーで構成される。光源172,182が照射する光の波長はたとえばそれぞれ異なっている。しかしそれらは同じであってもよい。
【0018】
光センサ174,184は、光ビームの入射位置の変化すなわちビームスポットの移動を反映した信号を出力する。光センサ174,184は、たとえば2分割フォトダイオードで構成される。この場合、光ビームの入射位置の変化を反映した信号は、2つの受光部の出力の差信号で得られる。光センサ174,184はまた、位置検出素子(PSD)で構成されてもよい。
【0019】
支持部110と光源172,182と光センサ174,184はヘッド102に保持されている。
【0020】
被測定物Sは、XYZステージ104に載置され、探針142の下方に配置される。XYZステージ104は、探針142と被測定物Sを互いに近づけたり遠ざけたりするために探針142と被測定物Sを相対的にZ軸に沿って移動させるZ走査機能と、Z軸に直交するX軸に沿って探針142と被測定物Sを相対的に移動させるX走査機能と、Z軸とX軸に直交するY軸に沿って探針142と被測定物Sを相対的に移動させるY走査機能とを有している。X走査機能とY走査機能とZ走査機能は、適宜、ヘッド102の側に分散されてもよい。つまり、被測定物Sを移動させる代わりにヘッド102を移動させる構成としてもよい。
【0021】
原子間力顕微鏡100はまた、装置全体を制御するコントローラ106を有している。コントローラ106は、振動発生部120、光源172,182の駆動、光センサ174,184と共働したXYZステージ104の制御、被測定物Sの測定画像の構築、構築画像の表示や保存、保存画像の読み出しなどをおこなう。
【0022】
このような構成の原子間力顕微鏡100において、振動発生部120はカンチレバー130を振動させる。カンチレバー130の基端側部132と探針側部136は互いにほぼ直交する方向に振動する。基端側部132探針側部136は、一方が他方に対して整数倍の固有振動数を有しているため、ほぼ等しい角振動数で振動する。その結果、探針142が擬似的な円運動をおこなう。
【0023】
図1において、光源172から射出された光ビームは、反射部144の反射面146で反射され、光センサ174に入射する。また、光源182から射出された光ビームは、反射部144の反射面148で反射され、光センサ184に入射する。探針142が被測定物Sから受ける力に応じてカンチレバー130の先端が変位し、これに応じて反射部144の反射面146,148の向きが変化する。その結果、光センサ174,184へ入射する光ビームの位置が変化する。光センサ174,184は、この光ビームの入射位置の変化を反映した信号を出力する。
【0024】
コントローラ106は、XYZステージ104を制御して、探針142と被測定物SをX軸とY軸に沿って相対的に移動させるXY走査をおこないながら光センサ174,184の出力信号を一定に保つように探針142と被測定物SをZ軸に沿って相対的に移動させるZ走査をおこない(Zサーボをかけ)、XYZステージ104の制御情報から被測定物Sの測定画像を構築する。
【0025】
本実施形態の原子間力顕微鏡100では、探針142が円運動をおこなうので、変位検出系によって感知される接触圧力すなわち探針142と被測定物Sの間に作用する力は被測定物の表面の傾斜角度に依存しない。このため、XY走査のあいだ探針142と被測定物Sの間の距離が被測定物の表面の傾斜角度によらずに一定に保たれる。また、探針142の円運動のためにカンチレバー130自体が振動されるので、被測定物Sを載せいているXYZステージ104の精度の低下や被測定物Sの各部の移動が起こらない。このため、剛性のない被測定物Sの形状測定を高精度におこなうことができる。
【0026】
<第二実施形態>
図3に示すように、原子間力顕微鏡200は、カンチレバー230と、カンチレバー230を支持する支持部210と、カンチレバー230に振動を与える振動発生部220とを備えている。
【0027】
カンチレバー230は、平板状で、基端と先端の間に屈折部234を有し、そこで鋭角に折り曲がっている。この屈折部234よりも基端側の部分を基端側部232とし、屈折部234よりも探針側の部分を探針側部236とする。言い換えれば、カンチレバー230は、基端側に位置する基端側部232と、探針側に位置する探針側部236とを有し、探針側部236は基端側部232から鋭角に屈折して延びている。基端側部232と探針側部236は、一方が他方に対して整数倍の固有振動数を有している。たとえば、基端側部232と探針側部236は等しい固有振動数を有している。たとえば、探針側部236は基端側部232に比べて幅が狭く長さが長く構成されている。
【0028】
カンチレバー230は、図5と図6から分かるように、平面視で、つまり平らに拡げた状態で、二等辺三角形形状をしており、その先端が探針242と機能する。つまり、カンチレバー230は先端に探針242を有し、探針242は探針側部236に平行に延びている。
なお、カンチレバー230は、等角台形形状でもよく、その場合には、探針側部236の側の底の中央部に、探針側部236と平行に、カンチレバー230の先端側に向けられた探針が設けられる。突出部が設けられてさらにその先端に探針が配置されてもよい。
【0029】
図3に示すように、振動発生部220は支持部210に固定され、カンチレバー230は基端側部232が振動発生部220に固定されている。支持部210は四角錐台形状をしており、小さい側の底面の端部に振動発生部220が固定されている。振動発生部220は一辺にわたって延び、振動発生部220の側面は支持部210の傾斜側面と同一面上に位置している。振動発生部220は、これに限らないが、たとえば圧電素子で構成される。
なお、カンチレバー230が二等辺三角形形状、またはニ等辺三角形の頂角を底辺に平行な直線で切り落とした形状である等角台形形状の場合には、振動発生部220へ固定される部分の幅が探針側部236より広くなり、カンチレバー230のねじれが少なくなる。
【0030】
カンチレバー230は、探針242の近くに、反射部244を有している。図4に示すように、反射部244は、複数たとえば2つの反射面246,248を有している。反射面246は基端側部232を向いており、反射面248はその反対側を向いている。
【0031】
図3に示すように、原子間力顕微鏡200はまた、探針242の変位を検出する光テコ方式の変位検出系として、反射面246,248に照射される光をそれぞれ射出する2つの光源272,282と、反射面246,248からの反射光をそれぞれ感知する2つの光センサ274,284とを有している。
【0032】
光源272,282はたとえば半導体レーザーで構成される。光源272,282が照射する光の波長は干渉を避けるためそれぞれ異なっている。
【0033】
光センサ274,284は、光ビームの入射位置の変化すなわちビームスポットの移動を反映した信号を出力する。光センサ274,284は、たとえば2分割フォトダイオードや位置検出素子(PSD)で構成される。
【0034】
光源272,282から射出された光を反射部244の反射面246,248へ導くため、支持部210は、光の通過を許す透光部212を有し、カンチレバー230の基端側部232は、光の通過を許す透光部238を有し、また原子間力顕微鏡200は、支持部210に支持された光ガイド部250と、光ガイド部250に支持された反射部材260を備えている。
【0035】
カンチレバー230の基端側部232の透光部238は貫通穴で構成されている。光ガイド部250は、カンチレバー230の基端側部232の透光部238を通って延びている。光ガイド部250は、たとえば、外側の側面に反射コートが施された四角柱形状の石英部材で構成される。
【0036】
図4に示すように、反射部材260は、カンチレバー230に対向する反射面262を有している。カンチレバー230は、反射部材260の反射面262に対向する面に反射面を有している。
【0037】
原子間力顕微鏡200はまた、図3に示すように、光源282から光センサ284へ至る光路を折り曲げるためのミラー288と、光源282から射出される光と光センサ284へ向かう光とを分離するためのハーフミラー286とを備えている。
【0038】
カンチレバー230は、図3に示すように、探針242を下にして配置されたとき、図6に示すように、水平面への投影において支持部210の内側に位置している。
【0039】
支持部210と光源272,282と光センサ274,284とハーフミラー286とミラー288はヘッド202に保持されている。
【0040】
被測定物Sは、XYZステージ204に載置され、探針242の下方に配置される。XYZステージ204は、探針242と被測定物Sを互いに近づけたり遠ざけたりするために探針242と被測定物Sを相対的にZ軸に沿って移動させるZ走査機能と、Z軸に直交するX軸に沿って探針242と被測定物Sを相対的に移動させるX走査機能と、Z軸とX軸に直交するY軸に沿って探針242と被測定物Sを相対的に移動させるY走査機能とを有している。X走査機能とY走査機能とZ走査機能は、適宜、ヘッド202の側に分散されてもよい。
【0041】
原子間力顕微鏡200はまた、装置全体を制御するコントローラ206を有している。コントローラ206は、振動発生部220、光源272,282の駆動、光センサ274,284と共働したXYZステージ204の制御、被測定物Sの測定画像の構築、構築画像の表示や保存、保存画像の読み出しなどをおこなう。
【0042】
このような構成の原子間力顕微鏡200において、振動発生部220はカンチレバー230を振動させる。カンチレバー230の基端側部232と探針側部236は互いに異なる方向に振動する。基端側部232探針側部236は、一方が他方に対して整数倍の固有振動数を有しているため、ほぼ等しい角振動数で振動する。その結果、探針242が擬似的な円運動をおこなう。言い換えれば、カンチレバー230は、振動発生部220によって振動されたときに探針242が擬似的な円運動をおこなうように設計されている。
【0043】
図3と図4において、光源272から射出された光ビームは、支持部210の透光部212を通って光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、カンチレバー230の探針側部236と反射部材260の反射面262で順に反射されて反射部244の反射面246へ向かう。その後、光ビームは、反射部244の反射面246で反射され、反射部材260の反射面262とカンチレバー230の探針側部236とで順に反射され、光ガイド部250と支持部210の透光部212を通って光センサ274に入射する。
【0044】
また、光源282から射出された光ビームは、ハーフミラー286に入射し、その一部が反射される。ハーフミラー286で反射された光ビームは、ミラー288で反射され、支持部210の透光部212を通って光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、カンチレバー230の探針側部236で反射されて反射部244の反射面248へ向かう。その後、光ビームは、反射部244の反射面248で反射され、カンチレバー230の探針側部236で反射されて光ガイド部250内に進入し、光ガイド部250の側面で反射されて光ガイド部250を出たのち、支持部210の透光部212を通り、ミラー288で反射され、ハーフミラー286に入射し、その一部が透過する。ハーフミラー286で反射された光ビームは光センサ284に入射する。
【0045】
このように、光源272,282からの光は、支持部210の透光部212と(支持部210の透光部212と)光ガイド部250の通過と、反射部材260とカンチレバー230と反射部244による反射とを経て、光センサ274,284に到達する。
【0046】
探針242が被測定物Sから受ける力に応じてカンチレバー230の先端が変位し、これに応じて反射部244の反射面246,248の向きが変化する。その結果、光センサ274,284へ入射する光ビームの位置が変化する。光センサ274,284は、この光ビームの入射位置の変化を反映した信号を出力する。
【0047】
コントローラ206は、XYZステージ204を制御して、探針242と被測定物SをX軸とY軸に沿って相対的に移動させるXY走査をおこないながら光センサ274,284の出力信号を一定に保つように探針242と被測定物SをZ軸に沿って相対的に移動させるZ走査をおこない(Zサーボをかけ)、XYZステージ204の制御情報から被測定物Sの測定画像を構築する。
【0048】
本実施形態の原子間力顕微鏡200では、探針242が円運動をおこなうので、変位検出系によって感知される接触圧力すなわち探針242と被測定物Sの間に作用する力は被測定物の表面の傾斜角度に依存しない。このため、XY走査のあいだ探針242と被測定物Sの間の距離が被測定物の表面の傾斜角度によらずに一定に保たれる。また、探針242の円運動のためにカンチレバー230自体が振動されるので、被測定物Sを載せいているXYZステージ204の精度の低下や被測定物Sの各部の移動が起こらない。このため、剛性のない被測定物Sの形状測定を高精度におこなうことができる。
【0049】
また原子間力顕微鏡200は、探針242が探針側部236に平行に延びており、さらに水平面への投影においてカンチレバー230が支持部210の内側に位置しているので、探針242の周囲の空間が空いている。このため本実施形態の原子間力顕微鏡200は、その表面が全体的に大きく湾曲している被測定物をも高精度に測定し得る。
【0050】
本実施形態において、変位検出系は、図3の構成に限らず、適宜変更されてよい。たとえば、反射部244の反射面246,248の向きを互いに内側に傾斜するように変更し、光ガイド部250と反射部材260を適宜省いた構成としてもよい。
これまで、図面を参照しながら本発明の実施形態を述べたが、本発明は、これらの実施形態に限定されるものではなく、その要旨を逸脱しない範囲において様々な変形や変更が施されてもよい。
【0051】
光源と光センサの位置関係は逆であってもよい。
【0052】
反射部の反射面の数は2つに限らず3つ以上であってもよい。
【0053】
探針の変位検出系は、光テコ方式のものに限らず、歪みゲージ方式や静電容量方式など、他の方式のもので構成されてもよい。
【0054】
カンチレバーの屈折部の数は1つに限らず2つ以上であってもよい。また、カンチレバーの折り曲がり角度は直角または鋭角に限らず鈍角であってもよい。
【0055】
探針の運動は円運動に限らず他の運動であってもよい。たとえば逆V字形の運動であってもよい。この場合、逆V字の2つの下端位置で力が感知される。
【0056】
光源は半導体レーザー限らず他の発光素子で構成されてもよく、また光ファイバなどの導光部材をさらに有する構成としてもよい。
【符号の説明】
【0057】
100…原子間力顕微鏡、102…ヘッド、104…XYZステージ、106…コントローラ、110…支持部、120…振動発生部、130…カンチレバー、132…基端側部、134…屈折部、136…探針側部、138…基部、140…突出部、142…探針、144…反射部、146…反射面、148…反射面、172…光源、174…光センサ、182…光源、184…光センサ、200…原子間力顕微鏡、202…ヘッド、204…XYZステージ、206…コントローラ、210…支持部、212…透光部、220…振動発生部、230…カンチレバー、232…基端側部、234…屈折部、236…探針側部、238…透光部、242…探針、244…反射部、246…反射面、248…反射面、250…光ガイド部、260…反射部材、262…反射面、272…光源、274…光センサ、282…光源、284…光センサ、286…ハーフミラー、288…ミラー。
【特許請求の範囲】
【請求項1】
先端に探針を有するカンチレバーと、
前記カンチレバーを支持する支持部と、
前記カンチレバーに振動を与える振動発生部と、
前記カンチレバーの変位を検出する変位検出系とを備え、
前記カンチレバーは、基端側に位置する基端側部と、前記基端側部から屈折して延びている探針側に位置する探針側部とを有し、前記基端側部と前記探針側部は、一方が他方に対して整数倍の固有振動数を有している原子間力顕微鏡。
【請求項2】
前記基端側部と前記探針側部は等しい固有振動数を有している、請求項1に記載の原子間力顕微鏡。
【請求項3】
前記振動発生部は前記支持部に固定され、前記カンチレバーは前記基端側部が前記振動発生部に固定されている、請求項1または2に記載の原子間力顕微鏡。
【請求項4】
前記カンチレバーは、複数の反射面を有する反射部を前記探針の近くに有し、前記変位検出系は、前記複数の反射面に照射される光をそれぞれ射出する複数の光源と、前記複数の反射面からの反射光をそれぞれ感知する複数の光センサとを有している、請求項1ないし3のいずれかひとつに記載の原子間力顕微鏡。
【請求項5】
前記複数の光源が照射する光の波長はそれぞれ異なっている、請求項4に記載の原子間力顕微鏡。
【請求項6】
前記探針側部は前記基端側部から鋭角に屈折して延び、前記探針は前記探針側部に平行に延びており、前記カンチレバーは、前記探針を下にして配置されたとき、水平面への投影において前記支持部の内側に位置している、請求項5に記載の原子間力顕微鏡。
【請求項7】
前記支持部は、光の通過を許す透光部を有し、前記カンチレバーの前記基端側部は、光の通過を許す透光部を有しており、前記光源からの光は、前記支持部の前記透光部と前記カンチレバーの前記透光部の通過と、前記反射部による反射とを経て、前記光センサに到達する、請求項6に記載の原子間力顕微鏡。
【請求項8】
前記カンチレバーの前記基端側部の前記透光部を通って延び、前記支持部に支持された光ガイド部をさらに備えており、前記光源からの光は、前記支持部の前記透光部と前記光ガイド部の通過と、前記反射部による反射とを経て、前記光センサに到達する、請求項7に記載の原子間力顕微鏡。
【請求項9】
前記光ガイド部に支持された反射部材をさらに備えており、前記反射部材は、前記カンチレバーに対向する反射面を有し、前記カンチレバーは、前記反射部材の前記反射面に対向する面に反射面を有しており、前記光源からの光は、前記支持部の前記透光部と前記光ガイド部の通過と、前記反射部材と前記カンチレバーと前記反射部による反射とを経て、前記光センサに到達する、請求項8に記載の原子間力顕微鏡。
【請求項1】
先端に探針を有するカンチレバーと、
前記カンチレバーを支持する支持部と、
前記カンチレバーに振動を与える振動発生部と、
前記カンチレバーの変位を検出する変位検出系とを備え、
前記カンチレバーは、基端側に位置する基端側部と、前記基端側部から屈折して延びている探針側に位置する探針側部とを有し、前記基端側部と前記探針側部は、一方が他方に対して整数倍の固有振動数を有している原子間力顕微鏡。
【請求項2】
前記基端側部と前記探針側部は等しい固有振動数を有している、請求項1に記載の原子間力顕微鏡。
【請求項3】
前記振動発生部は前記支持部に固定され、前記カンチレバーは前記基端側部が前記振動発生部に固定されている、請求項1または2に記載の原子間力顕微鏡。
【請求項4】
前記カンチレバーは、複数の反射面を有する反射部を前記探針の近くに有し、前記変位検出系は、前記複数の反射面に照射される光をそれぞれ射出する複数の光源と、前記複数の反射面からの反射光をそれぞれ感知する複数の光センサとを有している、請求項1ないし3のいずれかひとつに記載の原子間力顕微鏡。
【請求項5】
前記複数の光源が照射する光の波長はそれぞれ異なっている、請求項4に記載の原子間力顕微鏡。
【請求項6】
前記探針側部は前記基端側部から鋭角に屈折して延び、前記探針は前記探針側部に平行に延びており、前記カンチレバーは、前記探針を下にして配置されたとき、水平面への投影において前記支持部の内側に位置している、請求項5に記載の原子間力顕微鏡。
【請求項7】
前記支持部は、光の通過を許す透光部を有し、前記カンチレバーの前記基端側部は、光の通過を許す透光部を有しており、前記光源からの光は、前記支持部の前記透光部と前記カンチレバーの前記透光部の通過と、前記反射部による反射とを経て、前記光センサに到達する、請求項6に記載の原子間力顕微鏡。
【請求項8】
前記カンチレバーの前記基端側部の前記透光部を通って延び、前記支持部に支持された光ガイド部をさらに備えており、前記光源からの光は、前記支持部の前記透光部と前記光ガイド部の通過と、前記反射部による反射とを経て、前記光センサに到達する、請求項7に記載の原子間力顕微鏡。
【請求項9】
前記光ガイド部に支持された反射部材をさらに備えており、前記反射部材は、前記カンチレバーに対向する反射面を有し、前記カンチレバーは、前記反射部材の前記反射面に対向する面に反射面を有しており、前記光源からの光は、前記支持部の前記透光部と前記光ガイド部の通過と、前記反射部材と前記カンチレバーと前記反射部による反射とを経て、前記光センサに到達する、請求項8に記載の原子間力顕微鏡。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−196724(P2011−196724A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−61587(P2010−61587)
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月17日(2010.3.17)
【出願人】(000000376)オリンパス株式会社 (11,466)
[ Back to top ]