
反射型光学センサ及び画像形成装置
【課題】不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させることができる反射型光学センサを提供する。
【解決手段】 反射型光学センサ(2245a、2245b、2245c)は、本体部(Opta、Optb、Optc)、及びγ回転駆動部(Rma、Rmb、Rmc)を有している。本体部は、主方向に沿って等間隔で配置された11個の発光部を含む照射系、及び11個の受光部を含む受光系などを備えている。γ回転駆動部は、回転テーブル、ギア、ステッピングモータなどを有し、本体部をその中心を通り、Z軸に平行な軸まわりに回動させる。これにより、対向する中間転写ベルト2040の表面に平行な面内で本体部を回動させることが可能となり、中間転写ベルト上での光スポット列の方向を、容易に精度良く、主方向に対して平行とすることができる。
【解決手段】 反射型光学センサ(2245a、2245b、2245c)は、本体部(Opta、Optb、Optc)、及びγ回転駆動部(Rma、Rmb、Rmc)を有している。本体部は、主方向に沿って等間隔で配置された11個の発光部を含む照射系、及び11個の受光部を含む受光系などを備えている。γ回転駆動部は、回転テーブル、ギア、ステッピングモータなどを有し、本体部をその中心を通り、Z軸に平行な軸まわりに回動させる。これにより、対向する中間転写ベルト2040の表面に平行な面内で本体部を回動させることが可能となり、中間転写ベルト上での光スポット列の方向を、容易に精度良く、主方向に対して平行とすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、反射型光学センサ及び画像形成装置に係り、更に詳しくは、移動体上の画像を検出する反射型光学センサ、及び該反射型光学センサを備える画像形成装置に関する。
【背景技術】
【0002】
電子写真の画像記録において、高精細な画像品質を得るための画像形成手段として、レーザ光を用いた画像形成方法が広く用いられている。電子写真の場合、感光性を有するドラムの軸方向に、光走査装置を用いてレーザ光を走査しつつ、ドラムを回転させて、潜像を形成する方法が一般的である。
【0003】
そして、該潜像はトナーによって顕像化され、トナー画像となり、記録媒体である紙に転写された後、定着される。
【0004】
この場合、ドラム上のトナー画像は、紙の所望の位置に正しく転写される必要がある。このような適正位置へのトナー画像の転写は、ドラム上におけるトナー画像の転写されるべき紙に対する位置が適正に把握されていなければ実現できない。
【0005】
また、互いに色の異なる複数のトナー画像を重ね合わせて、多色画像を形成する場合には、トナー画像毎に位置を把握して適正な重ね合わせが必要となる。
【0006】
重ね合わせられる複数のトナー画像相互の位置関係が適切に調整されていないと、画像の書き出し位置が相互にずれてしまうレジストずれ、画像の寸法誤差となる倍率ずれ、さらにこれらが複数のトナー画像間で相対的にずれることによる色ずれなど、様々な異常画像が生じる。
【0007】
トナー画像の位置を適正に制御するため、従来から位置検知用のテストパターンを形成し、これに光を照射して反射光を受光し、受光量に対して所定のアルゴリズムによる演算を施して、トナー画像の位置を求めることが行われていた。
【0008】
トナー画像の位置検出に用いられる反射型光学センサは、従来から種々のタイプのものが提案されている。例えば、特許文献1には、正反射光検知方式或いは拡散反射光検知方式の反射型光学センサが開示されている。これは、LDやLEDからなる1つの光源と、検知方式に応じて光源との配置関係や受光部の構成が変更される受光センサとから構成されている。
【0009】
このタイプの反射型光学センサでは、テストパターンを照明する光スポットの大きさは2〜3mmが通常であった。一方、形成されるテストパターンの大きさは、そのテストパターンの移動方向(例えば、中間転写ベルトの移動方向;副方向)に直交する方向(主方向)に関して、一般的に15mm以上であった。
【0010】
また、例えば、特許文献2には、主方向の大きさが20mm、副方向の大きさ(幅)が1mmのライン状のトナーマーク(以下、「パッチ」ともいう)が複数配置されたテストパターンが開示されている。
【0011】
テストパターンの主方向の大きさを光スポットの同方向の大きさより大きくし、テストパターンと光スポットに相対的な位置誤差があっても、光スポットによりテストパターンを適正に照明できることを意図したものである。なお、上記相対的な位置誤差としては、(1)反射型光学センサの取り付け誤差、及び発光部の取り付け誤差による光の照射方向のずれ、などによって発生する光スポットの主方向の照射位置誤差や、(2)パッチ形成位置ずれ、及び感光体ドラムや中間転写ベルトの蛇行、などによって発生するパッチの主方向の位置誤差がある。
【0012】
ところで、テストパターンを形成するのに用いられるトナーは、本来の画像形成に寄与しない不寄与トナーである。このため、テストパターンの面積が大きくなれば、それに比例して不寄与トナーの消費量も多くなる。そこで、テストパターンの面積を小さくすることは、トナー消費量の観点から、画像形成に係るランニングコストの低減につながる。
【0013】
不寄与トナーの消費量を低減するためには、テストパターンを構成する各トナーマークの面積を小さくすれば良いが、テストパターンと光スポットに相対的な位置誤差があっても光スポットによりテストパターンが適正に照明されるように、トナーマークの主方向の大きさを光スポットより大きくする必要があり、トナーマークを小さくすることには限度があった。換言すれば、光スポットとの位置誤差に対する余裕度を持たせるという考え方がトナーマークの小面積化を阻害していたといえる。
【0014】
そこで、本出願人は、3個以上の発光部と3個以上の受光部を有する反射型光学センサを用い、従来よりも小さいテストパターンの位置検出を行うことを提案した(特許文献3参照)。
【0015】
特許文献3に開示されている反射型光学センサは、小さい光スポットでテストパターンを照明し、その反射光を複数の受光部で受光し、該複数の受光部の出力分布に基づいて正確な位置を演算的に割り出すという技術思想に基づいている。そして、主方向に沿って一列に並んでいる複数の光スポットの照明領域をテストパターンが通過するため、突発的な位置ずれがあってもテストパターンを確実に照明することができる。また、複数の受光部の出力分布に基づいてテストパターンの位置を判断するため、小さなテストパターンでも感度良く位置検出ができる。
【0016】
このとき、発光部の発光波長と、受光部のピーク感度波長とを略一致させることにより、受光部から出力される光電変換信号のレベルを最大限に高めることができ、位置検出精度を高めることができる。
【発明の概要】
【発明が解決しようとする課題】
【0017】
ところで、3個以上の発光部と3個以上の受光部を有する反射型光学センサでは、テストパターンを照明する光スポットが一列に並んでいるため、その並び方向(スポット列方向)と、ライン状のトナーマークの長手方向との関係が既知であることが必要である。
【0018】
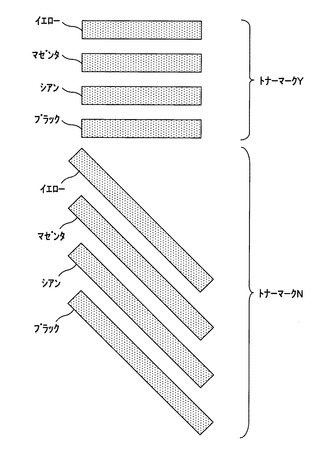
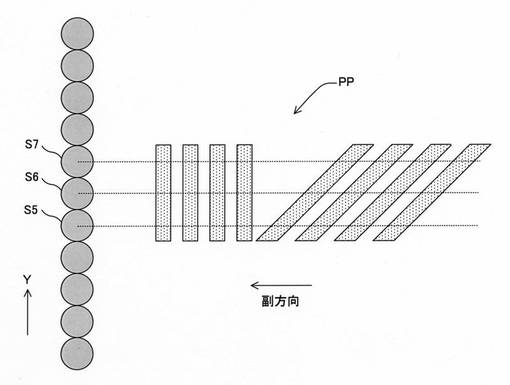
すなわち、図56に示されるような従来から知られるようなテストパターンにおいて、光スポット列は、トナーマークYに対しては平行に、トナーマークNに対して45度傾いていることが必要である。
【0019】
この理由について以下に説明する。
【0020】
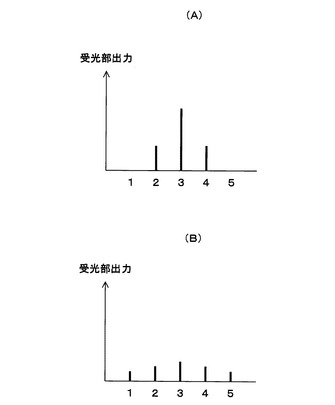
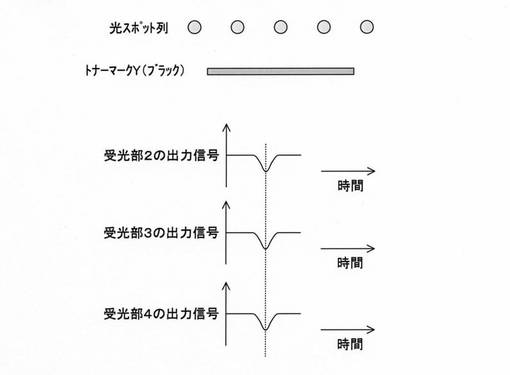
例えば、5つの発光部と5つの受光部を有する反射型光学センサでは、ある1つの発光部(例えば、発光部3)を点灯させると、複数の受光部(例えば、受光部2、受光部3、受光部4の3つの受光部)で反射光を受光することができる。
【0021】
平滑な移動材に対して光を照射したときの各受光部の出力例が図57(A)に示され、カラートナーのベタのテストパターンに対して光を照射したときの各受光部の出力例が図57(B)に示されている。なお、各受光部の出力分布は照射系の構成などにより調整可能である。
【0022】
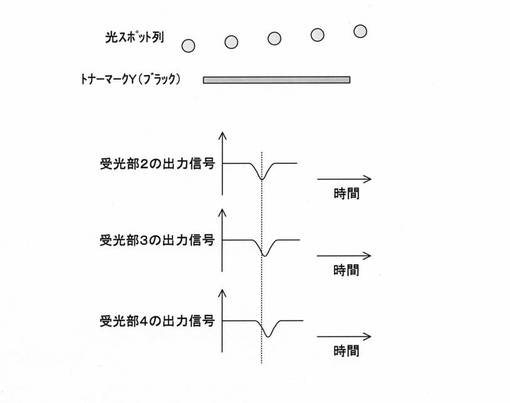
ここで、発光部2と発光部3と発光部4を同時に点灯させた場合を考える。
【0023】
トナーマークYが検出される際の受光部2、受光部3、受光部4の出力の時間変化が図58に示されている。ここでは、トナーマークYと光スポット列が平行であるため、各受光部の出力は時間的に同一である。
【0024】
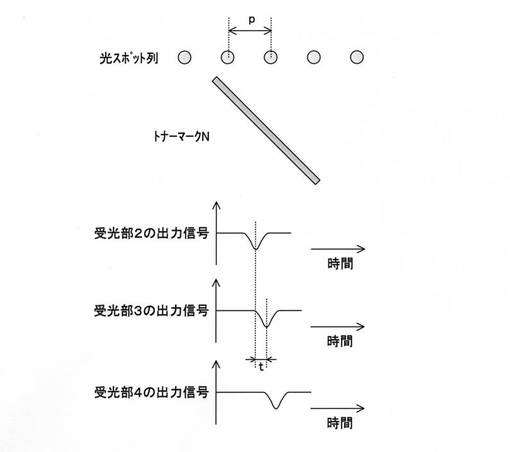
トナーマークNが検出される際の受光部2、受光部3、受光部4の出力の時間変化が図59に示されている。ここでは、トナーマークNが光スポット列に対して45度傾斜しているため、各受光部の出力は、発光部の間隔pとトナーマークNの移動速度vで決まる時間t(t=p/v)だけ順次遅れる。
【0025】
複数の発光部を点灯させたときの受光部出力からトナーマークの位置を算出する場合には、図58及び図59に示されるような受光部出力の時間的な情報が必要不可欠である。
【0026】
すなわち、1つのトナーマークに対して複数の発光部を同時に点灯させ、得られた複数の受光部出力を合成してトナーマークの位置検出を行う場合、主方向に関する発光部の位置と、各発光部に対応する受光部出力の時間的な情報がなくては、複数の受光部出力を適切に合成することができない。
【0027】
具体的には、図58の場合、各受光部出力は時間的に同一であるので、各受光部出力を単純に時間軸に対して加算すれば良い。図59の場合、各受光部出力は所定の時間間隔でずれているので、各受光部出力を時間軸に対してずらして加算していけば良い。
【0028】
ところで、図60に示されるように、光スポット列がトナーマークYに対して傾斜していると、各受光部出力は時間的にずれることとなる。このとき、各受光部出力を単純に時間軸に対して加算すると、信号幅が広がってしまい、検出精度が大きく低下する。この場合、トナーマークNを検出する際の各受光部出力も、上記時間tとは異なる時間のずれが生じることになる。通常、反射型光学センサを画像形成装置内の移動体(例えば、中間転写ベルト)に対向し、照射した光の反射光を受光するように取り付ける際、メカ公差内では取り付けができるものの、取り付けられた反射型光学センサからの光スポット列とトナーマークとの位置関係は不明である。そのため、光スポット列とトナーマークとの角度誤差に起因して、トナーマークの位置検出精度を高めることが困難であった。
【0029】
なお、特許文献1及び特許文献2に開示されている反射型光学センサでは、テストパターンを照明する光スポットが1つであるため、上述した受光部出力を合成する際の不都合はない。
【0030】
本発明は、かかる事情の下になされたもので、その第1の目的は、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させることができる反射型光学センサを提供することにある。
【0031】
その第2の目的は、高い画像品質を維持しつつ、ランニングコストを低減することができる画像形成装置を提供することにある。
【課題を解決するための手段】
【0032】
本発明は、第1の観点からすると、第1の方向に移動する移動体上のパターンを検出するための反射型光学センサであって、前記第1の方向に直交する第2の方向に沿って配列された複数の発光部を含む照射系と、該照射系から射出され前記パターンで反射された光を受光する複数の受光部を含む受光系と、前記第1の方向及び前記第2の方向のいずれに対しても直交する第3の方向に平行な軸まわりに、前記照射系及び前記受光系を回動させることができる駆動系と、を備える反射型光学センサである。
【0033】
これによれば、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させることができる。
【0034】
本発明は、第2の観点からすると、画像情報に応じた画像形成条件で移動体上に画像を形成する画像形成装置において、前記移動体上のテストパターンを検出するための本発明の反射型光学センサと、前記反射型光学センサの受光系の出力信号に基づいて、前記画像形成条件を調整する調整装置と、を備えることを特徴とする画像形成装置である。
【0035】
これによれば、高い画像品質を維持しつつ、ランニングコストを低減することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の一実施形態に係るカラープリンタの概略構成を説明するための図である。
【図2】プリンタ制御装置を説明するためのブロック図である。
【図3】光走査装置の概略構成を説明するための図(その1)である。
【図4】光走査装置の概略構成を説明するための図(その2)である。
【図5】光走査装置の概略構成を説明するための図(その3)である。
【図6】光走査装置の概略構成を説明するための図(その4)である。
【図7】トナーパターン検出器を説明するための図である。
【図8】反射型光学センサの配置位置を説明するための図である。
【図9】反射型光学センサを説明するための図である。
【図10】反射型光学センサの本体部を説明するための図(その1)である。
【図11】反射型光学センサの本体部を説明するための図(その2)である。
【図12】反射型光学センサの本体部を説明するための図(その3)である。
【図13】反射型光学センサの本体部を説明するための図(その4)である。
【図14】検出用光を説明するための図である。
【図15】反射型光学センサの本体部を説明するための図(その5)である。
【図16】図16(A)及び図16(B)は、それぞれ、反射型光学センサのγ回転駆動部を説明するための図である。
【図17】画像形成プロセス制御で用いられるトナーパターンを説明するための図である。
【図18】スポット列傾き検出用パターンQPを説明するための図である。
【図19】位置ずれ検出用パターンを説明するための図である。
【図20】各濃度検出用パターンにおける5つの矩形パターンを説明するための図である。
【図21】図21(A)及び図21(B)は、それぞれ、反射光を説明するための図である。
【図22】プリンタ制御装置によって行われる画像プロセス制御を説明するためのフローチャートである。
【図23】プリンタ制御装置によって行われる光スポット列の傾き検出処理を説明するためのフローチャートである。
【図24】光スポット列の傾斜角を説明するための図である。
【図25】検出用光スポットと位置ずれ検出用パターンの位置関係を説明するための図である。
【図26】位置ずれ検出処理での受光部D5及び受光部D6の出力信号を説明するための図である。
【図27】位置ずれ検出処理での受光部D5の出力信号と受光部D6の出力信号を加算した信号を説明するための図である。
【図28】位置ずれ検出方法を説明するための図である。
【図29】図29(A)及び図29(B)は、それぞれ副方向及び主方向の位置ずれ検出を説明するための図である。
【図30】検出用光スポットと矩形パターンの位置関係を説明するための図である。
【図31】照明対象物が中間転写ベルトのときの各受光部の受光量を説明するための図である。
【図32】照明対象物が濃度検出用パターンDP1の矩形パターンp1のときの各受光部の受光量を説明するための図である。
【図33】照明対象物が濃度検出用パターンDP1の矩形パターンp2のときの各受光部の受光量を説明するための図である。
【図34】照明対象物が濃度検出用パターンDP1の矩形パターンp3のときの各受光部の受光量を説明するための図である。
【図35】照明対象物が濃度検出用パターンDP1の矩形パターンp4のときの各受光部の受光量を説明するための図である。
【図36】照明対象物が濃度検出用パターンDP1の矩形パターンp5のときの各受光部の受光量を説明するための図である。
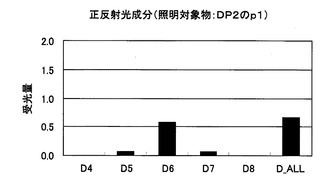
【図37】検出用光S6が矩形パターンp1で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
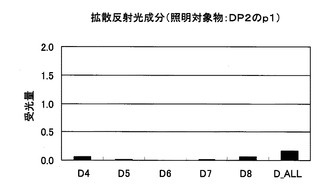
【図38】検出用光S6が矩形パターンp1で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
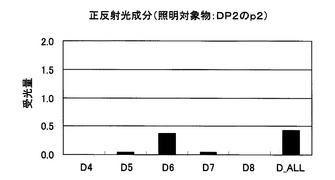
【図39】検出用光S6が矩形パターンp2で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
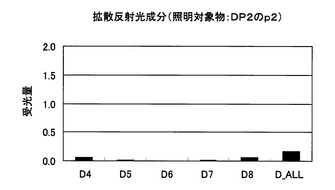
【図40】検出用光S6が矩形パターンp2で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
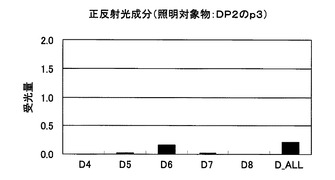
【図41】検出用光S6が矩形パターンp3で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
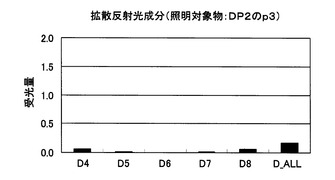
【図42】検出用光S6が矩形パターンp3で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
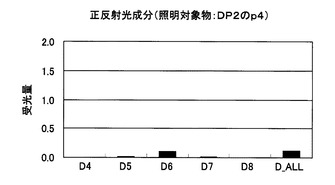
【図43】検出用光S6が矩形パターンp4で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
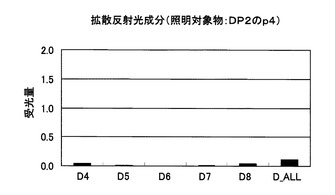
【図44】検出用光S6が矩形パターンp4で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
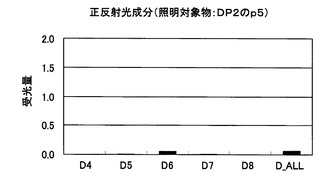
【図45】検出用光S6が矩形パターンp5で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
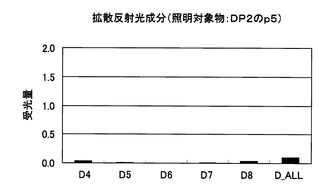
【図46】検出用光S6が矩形パターンp5で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
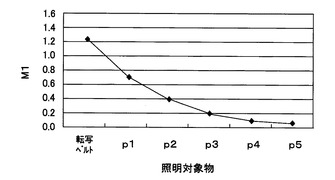
【図47】各照明対象物における正反射光成分の合計値M1を説明するための図である。
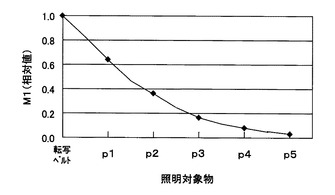
【図48】各照明対象物における正反射光成分の合計値M1の相対値を説明するための図である。
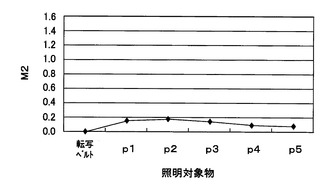
【図49】各照明対象物における拡散反射光成分の合計値M2を説明するための図である。
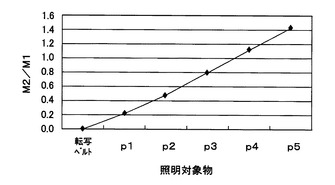
【図50】各照明対象物のM2/M1を説明するための図である。
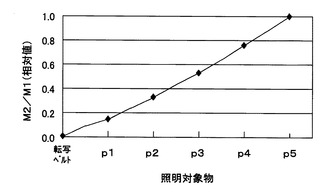
【図51】各照明対象物のM2/M1の相対値を説明するための図である。
【図52】検出用光スポットと位置ずれ検出用パターンの位置関係の変形例を説明するための図である。
【図53】位置ずれ検出用パターンの変形例を説明するための図である。
【図54】検出用光スポットと変形例の位置ずれ検出用パターンの位置関係を説明するための図である。
【図55】図54に対応した各発光部の点灯タイミング、各受光部出力のサンプリングタイミングを説明するための図である。
【図56】通常の位置ずれ検出用パターンを説明するための図である。
【図57】図57(A)は平滑な移動材に対して光を照射したときの各受光部の出力例を説明するための図であり、図57(B)はカラートナーのベタのテストパターンに対して光を照射したときの各受光部の出力例を説明するための図である。
【図58】図56のトナーマークYに対して複数の光を照射したときの各受光部の出力例を説明するための図である。
【図59】図56のトナーマークNに対して複数の光を照射したときの各受光部の出力例を説明するための図である。
【図60】光スポット列の傾きによる不都合を説明するための図である。
【発明を実施するための形態】
【0037】
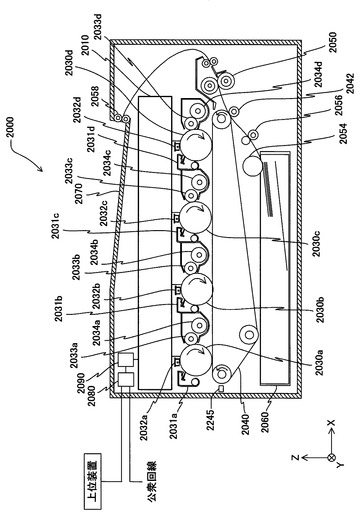
以下、本発明の一実施形態を図1〜図51に基づいて説明する。図1には、一実施形態に係る画像形成装置としてのカラープリンタ2000の概略構成が示されている。
【0038】
このカラープリンタ2000は、4色(ブラック、シアン、マゼンタ、イエロー)を重ね合わせてフルカラーの画像を形成するタンデム方式の多色カラープリンタであり、光走査装置2010、4つの感光体ドラム(2030a、2030b、2030c、2030d)、4つのクリーニングユニット(2031a、2031b、2031c、2031d)、4つの帯電装置(2032a、2032b、2032c、2032d)、4つの現像ローラ(2033a、2033b、2033c、2033d)、4つのトナーカートリッジ(2034a、2034b、2034c、2034d)、中間転写ベルト2040、転写ローラ2042、定着装置2050、給紙コロ2054、レジストローラ対2056、排紙ローラ2058、給紙トレイ2060、排紙トレイ2070、通信制御装置2080、トナーパターン検出器2245、温湿度センサ(図示省略)及び上記各部を統括的に制御するプリンタ制御装置2090などを備えている。
【0039】
なお、ここでは、XYZ3次元直交座標系において、各感光体ドラムの長手方向(回転軸方向)に沿った方向をY軸方向、4つの感光体ドラムの配列方向に沿った方向をX軸方向として説明する。
【0040】
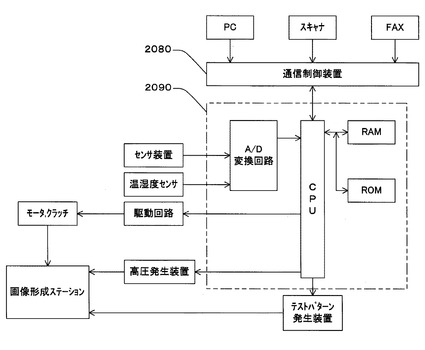
通信制御装置2080は、ネットワークなどを介した上位装置(例えば、パソコン、スキャナ)及び公衆回線を介した情報機器(例えば、ファクシミリ装置)との双方向の通信を制御する。そして、通信制御装置2080は、受信した情報をプリンタ制御装置2090に通知する。
【0041】
プリンタ制御装置2090は、CPU、該CPUにて解読可能なコードで記述されたプログラム及び該プログラムを実行する際に用いられる各種データが格納されているROM、作業用のメモリであるRAM、アナログデータをデジタルデータに変換するAD変換器などを有している(図2参照)。そして、プリンタ制御装置2090は、上位装置及び情報機器からの要求に応じて各部を制御するとともに、上位装置及び情報機器からの画像情報を光走査装置2010に送る。
【0042】
温湿度センサは、カラープリンタ2000内の温度と湿度を検出し、プリンタ制御装置2090に通知する。
【0043】
感光体ドラム2030a、帯電装置2032a、現像ローラ2033a、トナーカートリッジ2034a、及びクリーニングユニット2031aは、組として使用され、ブラックの画像を形成する画像形成ステーション(以下では、便宜上「Kステーション」ともいう)を構成する。
【0044】
感光体ドラム2030b、帯電装置2032b、現像ローラ2033b、トナーカートリッジ2034b、及びクリーニングユニット2031bは、組として使用され、シアンの画像を形成する画像形成ステーション(以下では、便宜上「Cステーション」ともいう)を構成する。
【0045】
感光体ドラム2030c、帯電装置2032c、現像ローラ2033c、トナーカートリッジ2034c、及びクリーニングユニット2031cは、組として使用され、マゼンタの画像を形成する画像形成ステーション(以下では、便宜上「Mステーション」ともいう)を構成する。
【0046】
感光体ドラム2030d、帯電装置2032d、現像ローラ2033d、トナーカートリッジ2034d、及びクリーニングユニット2031dは、組として使用され、イエローの画像を形成する画像形成ステーション(以下では、便宜上「Yステーション」ともいう)を構成する。
【0047】
各感光体ドラムはいずれも、その表面に感光層が形成されている。すなわち、各感光体ドラムの表面がそれぞれ光走査装置2010による光走査の被走査面である。なお、各感光体ドラムは、不図示の回転駆動機構により、図1における面内で矢印方向(時計回り)に回転する。
【0048】
各帯電装置は、対応する感光体ドラムの表面をそれぞれ均一に帯電させる。
【0049】
光走査装置2010は、プリンタ制御装置2090からの多色の画像情報(ブラック画像情報、シアン画像情報、マゼンタ画像情報、イエロー画像情報)に基づいて、各色毎に変調された光束を、対応する帯電された感光体ドラムの表面にそれぞれ照射する。これにより、各感光体ドラムの表面では、光が照射された部分だけ電荷が消失し、画像情報に対応した潜像が各感光体ドラムの表面にそれぞれ形成される。ここで形成された潜像は、感光体ドラムの回転に伴って対応する現像ローラの方向に移動する。なお、この光走査装置2010の詳細については後述する。
【0050】
各現像ローラは、回転に伴って、対応するトナーカートリッジからのトナーが、その表面に薄く均一に塗布される。そして、各現像ローラの表面のトナーは、対応する感光体ドラムの表面に接すると、該表面における光が照射された部分にだけ移行し、そこに付着する。すなわち、各現像ローラは、対応する感光体ドラムの表面に形成された潜像にトナーを付着させて顕像化させる。ここでトナーが付着した像(トナー画像)は、感光体ドラムの回転に伴って中間転写ベルト2040の方向に移動する。
【0051】
イエロー、マゼンタ、シアン、ブラックの各トナー画像は、所定のタイミングで中間転写ベルト2040上に順次転写され、重ね合わされて多色のカラー画像が形成される。ところで、中間転写ベルト2040上で、トナー画像の移動する方向は「副方向」と呼ばれ、該副方向に直交する方向(ここでは、Y軸方向)は「主方向」と呼ばれている。
【0052】
給紙トレイ2060には記録紙が格納されている。この給紙トレイ2060の近傍には給紙コロ2054が配置されており、該給紙コロ2054は、記録紙を給紙トレイ2060から1枚ずつ取り出し、レジストローラ対2056に搬送する。該レジストローラ対2056は、所定のタイミングで記録紙を中間転写ベルト2040と転写ローラ2042との間隙に向けて送り出す。そして、転写ローラ2042により、中間転写ベルト2040上のカラー画像が記録紙に転写される。ここで転写された記録紙は、定着装置2050に送られる。
【0053】
定着装置2050では、熱と圧力とが記録紙に加えられ、これによってトナーが記録紙上に定着される。ここで定着された記録紙は、排紙ローラ2058を介して排紙トレイ2070に送られ、排紙トレイ2070上に順次積み重ねられる。
【0054】
各クリーニングユニットは、対応する感光体ドラムの表面に残ったトナー(残留トナー)を除去する。残留トナーが除去された感光体ドラムの表面は、再度対応する帯電装置に対向する位置に戻る。
【0055】
トナーパターン検出器2245は、中間転写ベルト2040の−X側に配置されている。このトナーパターン検出器2245については後述する。
【0056】
次に、前記光走査装置2010の詳細について説明する。
【0057】
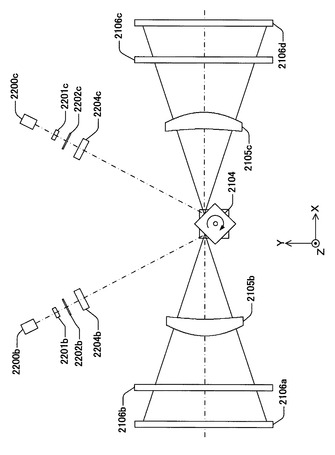
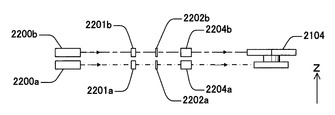
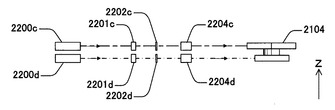
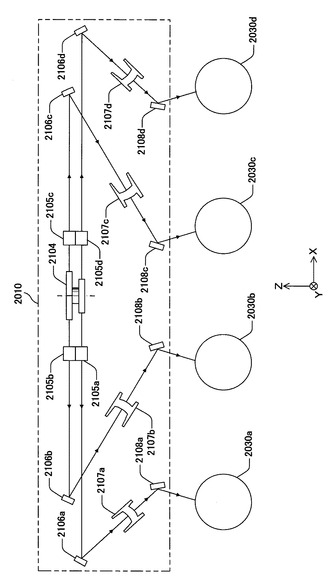
光走査装置2010は、一例として図3〜図6に示されるように、4つの光源(2200a、2200b、2200c、2200d)、4つのカップリングレンズ(2201a、2201b、2201c、2201d)、4つの開口板(2202a、2202b、2202c、2202d)、4つのシリンドリカルレンズ(2204a、2204b、2204c、2204d)、ポリゴンミラー2104、4つの偏向器側走査レンズ(2105a、2105b、2105c、2105d)、8枚の折り返しミラー(2106a、2106b、2106c、2106d、2108a、2108b、2108c、2108d)、4つの像面側走査レンズ(2107a、2107b、2107c、2107d)、及び不図示の走査制御装置などを備えている。
【0058】
なお、以下では、便宜上、主走査方向に対応する方向を「主走査対応方向」と略述し、副走査方向に対応する方向を「副走査対応方向」と略述する。
【0059】
光源2200a、カップリングレンズ2201a、開口板2202a、シリンドリカルレンズ2204a、偏向器側走査レンズ2105a、像面側走査レンズ2107a、2枚の折り返しミラー(2106a、2108a)は、感光体ドラム2030aに潜像を形成するための光学部材である。
【0060】
光源2200b、カップリングレンズ2201b、開口板2202b、シリンドリカルレンズ2204b、偏向器側走査レンズ2105b、像面側走査レンズ2107b、2枚の折り返しミラー(2106b、2108b)は、感光体ドラム2030bに潜像を形成するための光学部材である。
【0061】
光源2200c、カップリングレンズ2201c、開口板2202c、シリンドリカルレンズ2204c、偏向器側走査レンズ2105c、像面側走査レンズ2107c、2枚の折り返しミラー(2106c、2108c)は、感光体ドラム2030cに潜像を形成するための光学部材である。
【0062】
光源2200d、カップリングレンズ2201d、開口板2202d、シリンドリカルレンズ2204d、偏向器側走査レンズ2105d、像面側走査レンズ2107d、2枚の折り返しミラー(2106d、2108d)は、感光体ドラム2030dに潜像を形成するための光学部材である。
【0063】
各光源は、走査制御装置によって点灯及び消灯される。
【0064】
各カップリングレンズは、対応する光源から射出された光束の光路上に配置され、該光束を略平行光束とする。各開口板は、開口部を有し、対応するカップリングレンズを介した光束を整形する。各シリンドリカルレンズは、対応する開口板の開口部を通過した光束を、ポリゴンミラー2104の偏向反射面近傍にZ軸方向に関して結像する。
【0065】
ポリゴンミラー2104は、2段構造の4面鏡を有し、各鏡がそれぞれ偏向反射面となる。そして、1段目(下段)の4面鏡ではシリンドリカルレンズ2204aからの光束及びシリンドリカルレンズ2204dからの光束がそれぞれ偏向され、2段目(上段)の4面鏡ではシリンドリカルレンズ2204bからの光束及びシリンドリカルレンズ2204cからの光束がそれぞれ偏向されるように配置されている。
【0066】
ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204aからの光束は、偏向器側走査レンズ2105a、折り返しミラー2106a、像面側走査レンズ2107a、及び折り返しミラー2108aを介して、感光体ドラム2030aに照射され、光スポットが形成される。
【0067】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204bからの光束は、偏向器側走査レンズ2105b、折り返しミラー2106b、像面側走査レンズ2107b、及び折り返しミラー2108bを介して、感光体ドラム2030bに照射され、光スポットが形成される。
【0068】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204cからの光束は、偏向器側走査レンズ2105c、折り返しミラー2106c、像面側走査レンズ2107c、及び折り返しミラー2108cを介して、感光体ドラム2030cに照射され、光スポットが形成される。
【0069】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204dからの光束は、偏向器側走査レンズ2105d、折り返しミラー2106d、像面側走査レンズ2107d、及び折り返しミラー2108dを介して、感光体ドラム2030dに照射され、光スポットが形成される。
【0070】
各感光体ドラム上の光スポットは、ポリゴンミラー2104の回転に伴って感光体ドラムの長手方向に移動する。このときの光スポットの移動方向が「主走査方向」であり、感光体ドラムの回転方向が「副走査方向」である。また、各感光体ドラムにおける画像情報が書き込まれる主走査方向の走査領域は「有効走査領域」、「画像形成領域」、あるいは「有効画像領域」などと呼ばれている。
【0071】
次に、前記トナーパターン検出器2245について説明する。
【0072】
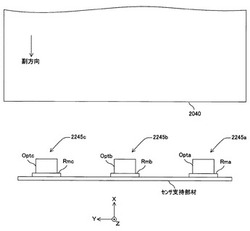
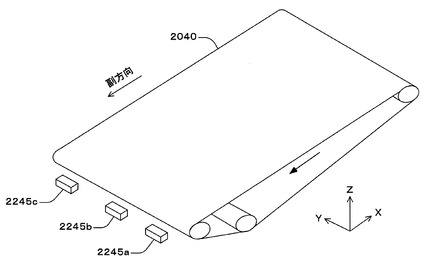
このトナーパターン検出器2245は、一例として図7に示されるように、3つの反射型光学センサ(2245a、2245b、2245c)を有している。
【0073】
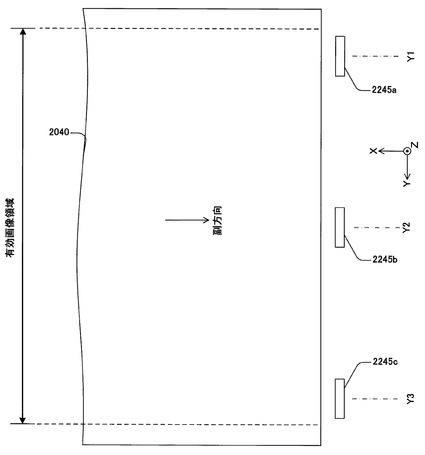
そして、一例として図8に示されるように、中間転写ベルト2040における有効画像領域内で、反射型光学センサ2245aは−Y側の端部近傍に配置され、反射型光学センサ2245cは+Y側の端部近傍に配置されている。反射型光学センサ2245bは、主方向に関して、反射型光学センサ2245aと反射型光学センサ2245cの略中間位置に配置されている。
【0074】
ここでは、主方向に関して、反射型光学センサ2245aの中心位置をY1、反射型光学センサ2245bの中心位置をY2、反射型光学センサ2245cの中心位置をY3とする。
【0075】
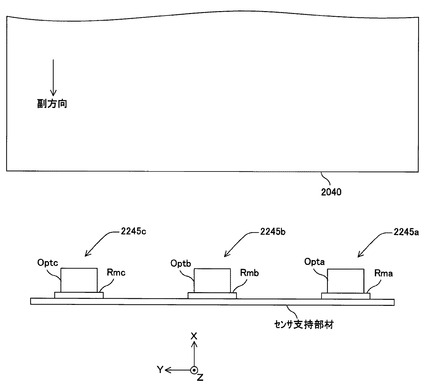
3つの反射型光学センサ(2245a、2245b、2245c)は、一例として図9に示されるように、センサ支持部材に支持されている。なお、センサ支持部材は、各反射型光学センサを個別に支持するものであっても良い。
【0076】
そして、反射型光学センサ2245aは、本体部Opta及びγ回転駆動部Rmaを有している。また、反射型光学センサ2245bは、本体部Optb及びγ回転駆動部Rmbを有している。さらに、反射型光学センサ2245cは、本体部Optc及びγ回転駆動部Rmcを有している。
【0077】
3つの本体部(Opta、Optb、Optc)は、いずれも同じ構成、同じ構造を有している。そこで、以下では、本体部Optaを代表として、本体部の構成及び構造について説明する。
【0078】
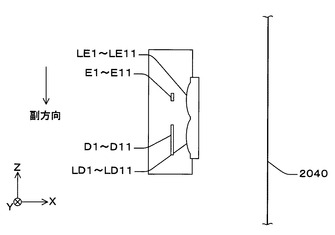
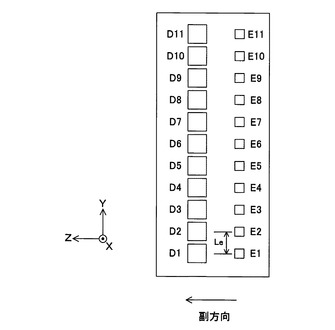
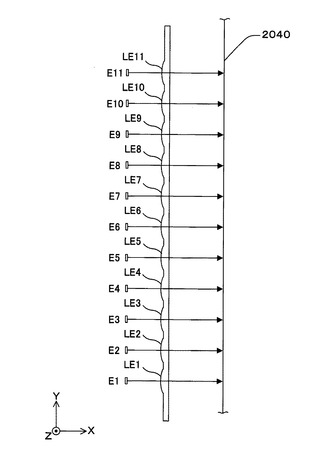
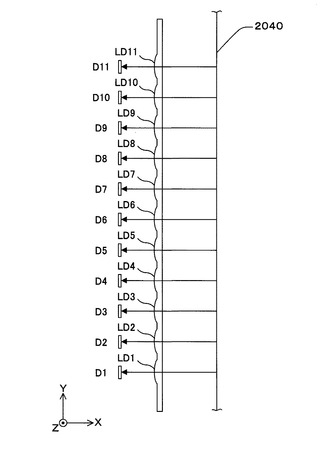
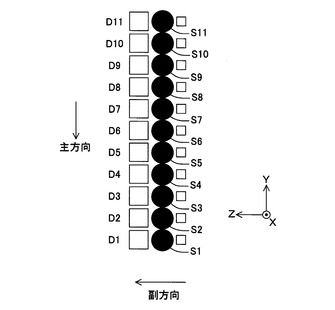
本体部Optaは、一例として図10〜図13に示されるように、11個の発光部(E1〜E11)を含む照射系、11個の照明用マイクロレンズ(LE1〜LE11)を含む照明光学系、11個の受光用マイクロレンズ(LD1〜LD11)を含む受光光学系、11個の受光部(D1〜D11)を含む受光系、及びそれらが保持されているセンサハウジング(図示省略)などを備えている。
【0079】
11個の発光部(E1〜E11)は、主方向に沿って等しい間隔Leで配置されている。各発光部には、LED(Light Emitting Diode)を用いることができる。ここでは、一例として、Le=0.4mmとしている。この場合は、主方向に関して、E1とE11との間の距離は4mm(Le×10)である。また、各発光部の主方向の大きさは約0.04mmである。さらに、各発光部から射出される光束の波長は850nmである。
【0080】
11個の発光部(E1〜E11)は、プリンタ制御装置2090によって点灯及び消灯される。なお、以下では、便宜上、点灯された発光部を「点灯発光部」と略述する。
【0081】
11個の照明用マイクロレンズ(LE1〜LE11)は、それぞれ11個の発光部(E1〜E11)に個別に対応している。
【0082】
各照明用マイクロレンズは、対応する発光部から射出された光束を中間転写ベルト2040の表面に向けて集光的に導く。各照明用マイクロレンズでは、レンズ径、レンズの曲率半径、及びレンズ厚は同一である。また、各照明用マイクロレンズの光軸は、対応する発光部の発光面に直交する方向に平行である。
【0083】
ここでは、説明をわかりやすくするため、各発光部から射出され対応する照明用マイクロレンズを通過した光束のみが、検出用光(S1〜S11)として中間転写ベルト2040を照明するものとする(図14参照)。そして、各検出用光によって中間転写ベルト2040の表面に形成される光スポット(以下では、便宜上「検出用光スポット」と略述する)の中心は、副方向に関して、対応する発光部と受光部の中間付近にある。
【0084】
各検出用光スポットの大きさ(直径)は、一例として、0.4mmである。この値は、上記発光部の間隔Leと等しい。なお、従来の検出用光スポットの大きさ(直径)は、通常、2〜3mm程度であった。
【0085】
また、ここでは、中間転写ベルト2040の表面は滑らかであり、中間転写ベルト2040の表面に照射された検出用光のほとんどは正反射される。
【0086】
11個の受光部(D1〜D11)は、それぞれ発光部(E1〜E11)に個別に対応している。
【0087】
各受光部は、対応する発光部から射出され、中間転写ベルト2040の表面で正反射された光束の光路上に配置されている。そして、11個の受光部の間隔(配列ピッチ)は、11個の発光部の間隔Leと等しい。各受光部の主方向の大きさは約0.35mmである。また、各受光部における受光感度のピーク波長は850nm付近にある。
【0088】
各受光部には、PD(フォトダイオード)を用いることができる。そして、各受光部は、受光量に応じた信号を出力する。
【0089】
11個の受光用マイクロレンズ(LD1〜LD11)は、それぞれ11個の受光部(D1〜D11)に個別し、中間転写ベルト2040あるいはトナーパターンで反射された検出用光を集光する。この場合には、各受光部の受光量を増加させることが可能となる。すなわち、検出感度を向上させることができる。各受光用マイクロレンズでは、レンズ径、レンズの曲率半径、及びレンズ厚は同一である。
【0090】
各マイクロレンズには、主方向及び副方向に関して集光機能を有する球面レンズや、副方向に関して正のパワーを持つシリンドリカルレンズ、主方向に関するパワーと副方向に関するパワーとが互いに異なるアナモフィックレンズなどを用いることができる。
【0091】
ここでは、一例として、各マイクロレンズは球面レンズである。そして、各照明用マイクロレンズでは、入射側の光学面は集光パワーを有し、射出側の光学面は集光パワーを有していない。また、各受光用マイクロレンズでは、射出側の光学面は集光パワーを有し、入射側の光学面は集光パワーを有していない。
【0092】
具体的には、各照明用マイクロレンズでは、レンズ径は0.613mm、レンズの曲率半径は0.430mm、レンズ厚は0.129mmである。
【0093】
各受光用マイクロレンズでは、レンズ径は0.750mm、レンズの曲率半径は0.380mm、レンズ厚は0.319mmである。
【0094】
ここでは、各受光用マイクロレンズのレンズ径を各照明用マイクロレンズより大きくすることで、反射光をより多く受光できるようにした。また、各受光用マイクロレンズの曲率半径を各照明用マイクロレンズに比べて小さくすることで、レンズ内部における全反射が増えるため、正反射光の受光量が減らせることが可能であると考えた。また、各受光用マイクロレンズの曲率半径を小さくすることで、点灯させる発光部に対応する受光部に隣接する受光部の前面に配置した受光用マイクロレンズ通過後の光線を大きく屈折させることが可能となり、テストパターンからの拡散反射光が受光部に到達でき、拡散反射光の受光量も増加することが期待できる。
【0095】
本実施形態では、11個の照明用マイクロレンズ(LE1〜LE11)と11個の受光用マイクロレンズ(LD1〜LD11)は、一体化され、マイクロレンズアレイとなっている。これにより、各マイクロレンズを所定位置に組み付ける際の作業性を向上させることができる。また、複数のマイクロレンズにおけるレンズ面間の位置精度を高めることができる。各レンズ面は、フォトリソグラフィやモールド成形などの加工法を用いてガラス基板や樹脂基板上に形成することができる。
【0096】
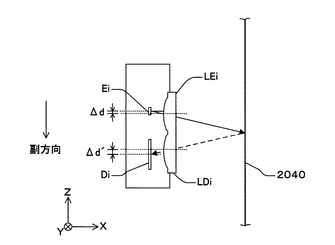
なお、以下では、発光部を特定する必要がない場合には、発光部Eiと表記する。そして、発光部Eiに対応する照明用マイクロレンズを照明用マイクロレンズLEiと表記する。また、発光部Eiから射出され照明用マイクロレンズLEiを通過した光束を、検出用光Siと表記する。また、発光部Eiに対応する受光部を受光部Diと表記する。さらに、受光部Diに対応する受光用マイクロレンズを受光用マイクロレンズLDiと表記する。また、検出用Siによる検出用光スポットを、「検出用光スポットSi」と表記する。
【0097】
また、一例として図15に示されるように、各照明用マイクロレンズの光軸は、対応する各発光部の中心を通り該発光部に垂直な軸に対して受光系側にΔd(ここでは、0.035mm)ずれている。また、各受光用マイクロレンズの光軸は、対応する各受光部の中心を通り該受光部に垂直な軸に対して照射系側にΔd’(ここでは、0.020mm)ずれている。これにより、より多くの反射光を対応する受光部に導くことができる。
【0098】
そして、副方向に関して、照明用マイクロレンズLEiと受光用マイクロレンズLDiのレンズ間距離は0.445mm、発光部Eiと受光部Diの間隔は、0.500mmである。さらに、副方向に関して、発光部Eiから照明用マイクロレンズLEiまでの距離は、0.800mmであり、各マイクロレンズの−Z側の面から中間転写ベルト2040表面までの距離は、5mmである。
【0099】
γ回転駆動部Rmaは、本体部Optaをその中心を通り、Z軸に平行な軸まわりに回動させる。γ回転駆動部Rmbは、本体部Optbをその中心を通り、Z軸に平行な軸まわりに回動させる。γ回転駆動部Rmcは、本体部Optcをその中心を通り、Z軸に平行な軸まわりに回動させる。
【0100】
3つのγ回転駆動部(Rma、Rmb、Rmc)は、いずれも同じ構成、同じ構造を有している。そこで、以下では、γ回転駆動部Rmaを代表として、γ回転駆動部の構成及び構造について説明する。
【0101】
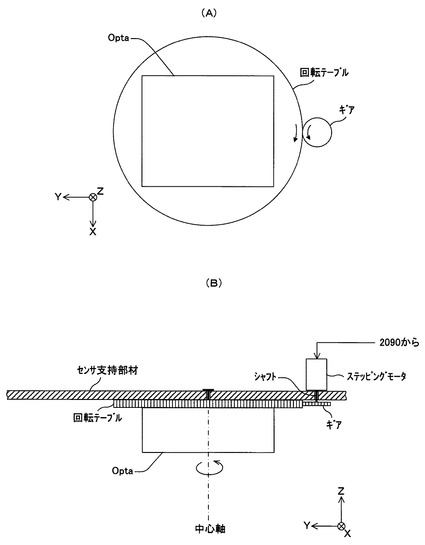
γ回転駆動部Rmaは、一例として図16(A)及び図16(B)に示されるように、回転テーブル、ギア、ステッピングモータなどを有している。
【0102】
回転テーブルは、円板状の部材であり、センサ支持部材の−Z側の面に、その中心を通り、Z軸に平行な軸まわりに回動可能に取り付けられている。この回転テーブルの側面には、ギアに係合されるねじ溝が形成されている。そして、回転テーブルの−Z側の面に本体部Optaが固定されている。このとき、回転テーブルの回転軸上に本体部Optaの中心が位置するように設定されている。そこで、回転テーブルが回転すると、本体部Optaは、その中心を通りZ軸に平行な軸まわりに回転することとなる。
【0103】
ギアは、回転テーブルの−Y側で、回転テーブルのねじ溝に係合する位置に配置されている。このギアは、シャフトを介してステッピングモータに接続されている。そこで、ステッピングモータが回転すると、ギアが回転し、回転テーブルが回転する。このステッピングモータは、プリンタ制御装置2090によって制御される。
【0104】
次に、画像形成プロセス制御で用いられるテストパターンとしてのトナーパターンについて説明する。
【0105】
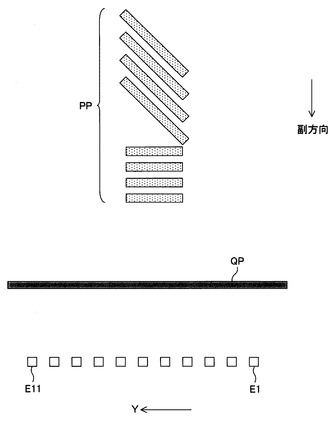
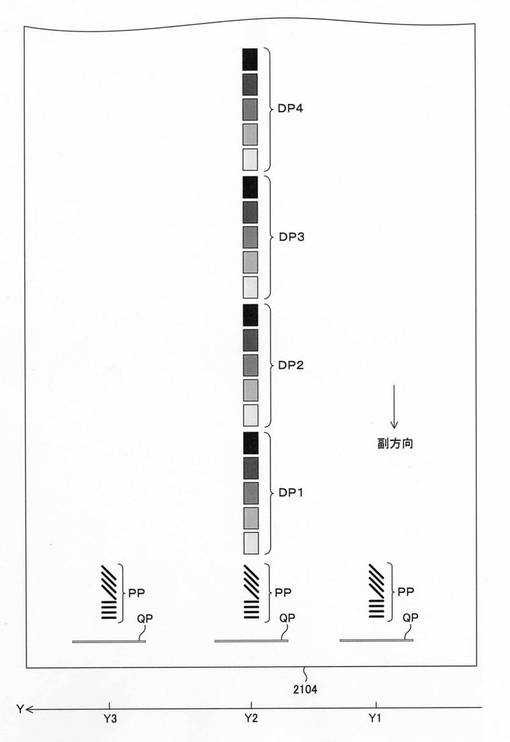
ここでは、一例として図17に示されるように、Y1位置にパターンQPとパターンPPが形成され、Y2位置にパターンQPとパターンPPとパターンDP1〜DP4が形成され、Y3位置にパターンQPとパターンPPが形成される。
【0106】
パターンQPはスポット列傾き検出用パターンであり、パターンPPは位置ずれ検出用パターンであり、パターンDP1〜DP4は、いずれも濃度検出用パターンである。
【0107】
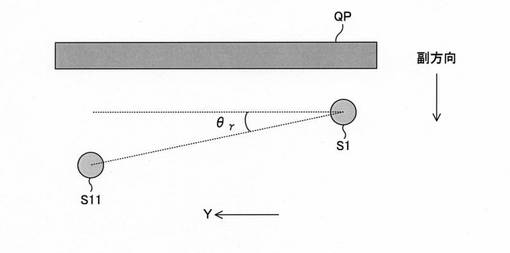
スポット列傾き検出用パターンQPは、一例として図18に示されるように、主方向を長手方向とし、主方向に関して、両端の発光部間の距離(ここでは、4mm)よりも長い(例えば、5.0mm)ライン状パターンであり、ブラックトナーで形成される。また、スポット列傾き検出用パターンQPの副方向の長さは0.5mmである。
【0108】
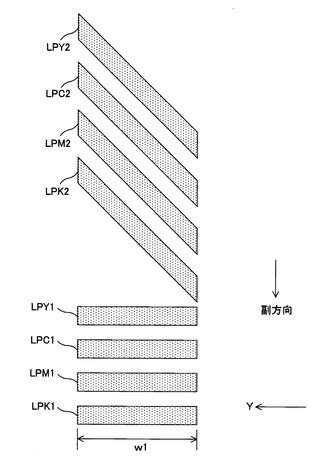
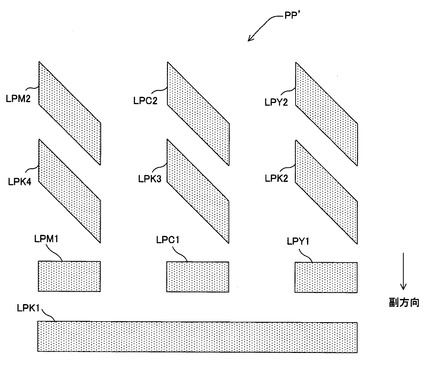
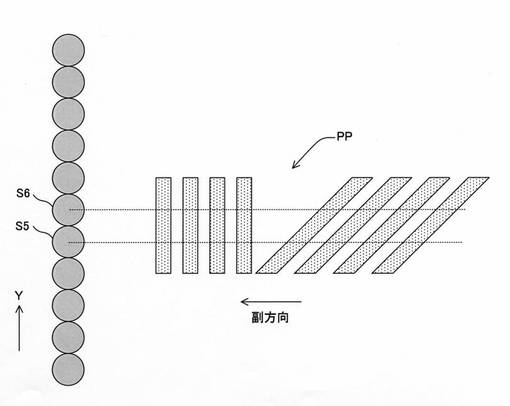
位置ずれ検出用パターンPPは、一例として図19に示されるように、主方向(Y軸方向)に平行な4本のライン状パターン(LPK1、LPM1、LPC1、LPY1)からなる第1のパターン群と、主方向に対して傾斜した4本のライン状パターン(LPK2、LPM2、LPC2、LPY2)からなる第2のパターン群とにより構成されている。
【0109】
ライン状パターンLPK1とLPK2はペアをなし、ブラックトナーで形成され、ライン状パターンLPM1とLPM2はペアをなし、マゼンタトナーで形成される。また、ライン状パターンLPC1とLPC2はペアをなし、シアントナーで形成され、ライン状パターンLPY1とLPY2はペアをなし、イエロートナーで形成される。
【0110】
第1のパターン群では、各ライン状パターンの主方向の長さw1を1.2mm、副方向の長さを0.5mmとし、それらの副方向の間隔を1mmとしている。この場合は、主方向に関して、ライン状パターンの長さを、「検出用光スポットの大きさ」+「発光部間隔Le」×2、と等しくすることができる。
【0111】
また、第2のパターン群では、各ライン状パターンの傾斜角を45°とし、主方向に関する長さw1を1.2mm(=w1)、線幅を0.5mmとしている。
【0112】
濃度検出用パターンDP1はブラックトナーで形成され、濃度検出用パターンDP2はマゼンタトナーで形成される。また、濃度検出用パターンDP3はシアントナーで形成され、濃度検出用パターンDP4はイエロートナーで形成される。
【0113】
なお、以下では、濃度検出用パターンDP1〜DP4を区別する必要がない場合には、総称して「濃度検出用パターンDP」ともいう。
【0114】
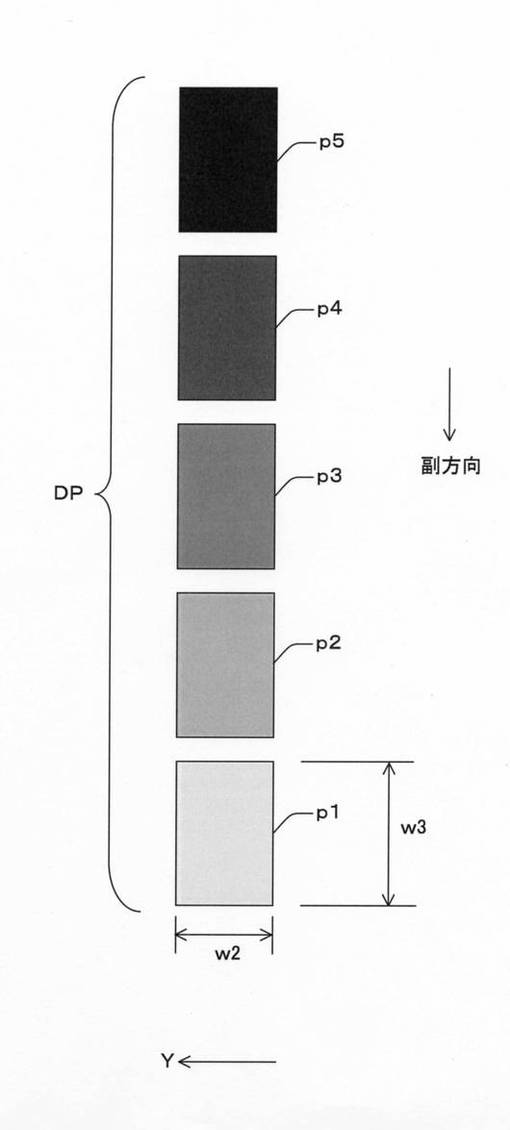
濃度検出用パターンDPは、一例として図20に示されるように、5個の四角形状のパターン(p1〜p5、以下では、便宜上「矩形パターン」という)を有している。各矩形パターンは、中間転写ベルト2040の移動方向に沿って並んでおり、それぞれ全体としてみたときにトナー濃度の階調が異なっている。ここでは、トナー濃度の低い矩形パターンから、p1、p2、p3、p4、p5とする。すなわち、矩形パターンp1のトナー濃度が最も低く、矩形パターンp5のトナー濃度が最も高い。
【0115】
ここでは、一例として、各矩形パターンの主方向の長さw2を1mm、副方向の長さw3を2mmとしている。すなわち、各矩形パターンの主方向の長さw2は、発光部の間隔Le(0.4mm)と検出用光スポットの大きさ(0.4mm)の和よりも大きい。この場合は、検出用光スポットは矩形パターンを確実に照明することができ、光の利用効率を高くすることが可能である。また、副方向に関して、隣接する2つの矩形パターンの中心間隔は3mmである。
【0116】
この場合は、トナーパターンを作成するのに必要なトナー量を従来の1/100程度とすることができる。すなわち、不寄与トナーの量を大幅に減少させることができる。その結果、トナーカートリッジの交換時期を延長させることができる。
【0117】
ところで、トナー濃度の階調は、光源から射出される光束のパワーの調整、光源に供給される駆動パルスにおけるデューティの調整、帯電バイアス及び現像バイアスの調整によって変えることができる。また、網点の面積率を変えることによっても、トナー濃度の階調を変化させることができる。
【0118】
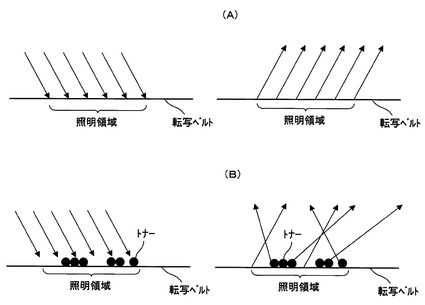
なお、検出用光が、中間転写ベルトのみを照明したときの反射光は、ほとんどが中間転写ベルト表面で正反射された反射光(正反射光)である(図21(A)参照)。一方、検出用光が、パターンを照明したときは、該検出用光は、トナーだけでなく下地の中間転写ベルト表面にも到達する(図21(B)参照)。そこで、パターンを照明したときの反射光は、中間転写ベルト表面で正反射された光と、少なくとも1回はトナーで反射・屈折されることにより散乱された光とに大別される。なお、後者の散乱光には、中間転写ベルト表面から正反射される方向と同一方向に散乱されるものも含まれるが、その光量は少ないものとし、また、中間転写ベルト表面から正反射される光と区別できないため、無視して考える。すなわち、前者の中間転写ベルトに起因する光を正反射寄与分、後者のトナーに起因する光を拡散反射寄与分とする。このように、パターンを照明した検出用光は、正反射されるとともに拡散反射される。
【0119】
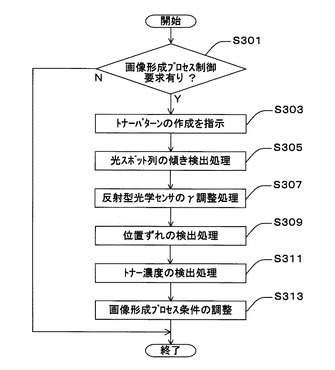
次に、トナーパターン検出器2245を用いて行われる画像形成プロセス制御処理について図22を用いて説明する。図22のフローチャートは、画像形成プロセス制御処理の際に、プリンタ制御装置2090によって実行される一連の処理アルゴリズムに対応している。
【0120】
最初のステップS301では、画像形成プロセス制御の要求があるか否かを判断する。ここでは、画像形成プロセス制御フラグがセットされていれば、ここでの判断は肯定され、画像形成プロセス制御フラグがセットされていなければ、ここでの判断は否定される。
【0121】
画像形成プロセス制御フラグは、電源投入直後では、(1)感光体ドラムの停止時間が6時間以上のとき、(2)装置内の温度が10℃以上変化しているとき、(3)装置内の相対湿度が50%以上変化しているとき、印刷時では、(4)プリント枚数が所定の枚数に達したとき、(5)現像ローラの回転回数が所定の回数に達したとき、(6)中間転写ベルトの走行距離が所定の距離に達したときなどにセットされる。
【0122】
ステップS301での判断が否定されると、画像形成プロセス制御処理は行われない。一方、ステップS301での判断が肯定されると、画像形成プロセス制御フラグをリセットし、ステップS303に移行する。
【0123】
このステップS303では、走査制御装置に対してトナーパターンの作成を指示する。
【0124】
これにより、走査制御装置は、各感光体ドラムにおける所定位置に、トナーパターンが形成されるように各ステーションを制御する。
【0125】
なお、各パターンを形成するために必要なパターンの形成位置情報、濃度情報、濃度検出用パターンの各諧調に対応したバイアス条件、トナー濃度を推定するための反射型光学センサの出力の濃度変換LUT(ルック・アップ・テーブル)は、走査制御装置のメモリに予め格納されている。また、各位置ずれ検出用パターン及び各スポット列傾き検出用パターンQPは、同一の作像条件(露光パワー、帯電バイアス、現像バイアスなど)で形成される。
【0126】
そして、各パターンは、それぞれ所定のタイミングで中間転写ベルト2040に転写される。
【0127】
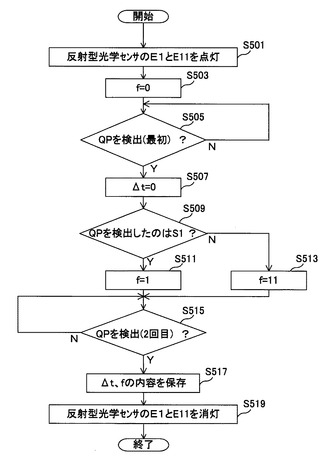
次のステップS305では、3つの反射型光学センサについて、光スポット列の傾き検出処理を行う。各反射型光学センサにおける光スポット列の傾き検出処理は、同様にして行われるので、以下では、1つの反射型光学センサにおける光スポット列の傾き検出処理を図23のフローチャートを用いて説明する。
【0128】
最初のステップS501では、反射型光学センサにおける発光部E1と発光部E11を点灯させる。
【0129】
次のステップS503では、フラグfを初期化(0リセット)する。
【0130】
次のステップS505では、受光部D1の出力信号及び受光部D11の出力信号を参照し、スポット列傾き検出用パターンQPが検出されたか否かを判断する。スポット列傾き検出用パターンQPが検出されていなければ、ここでの判断は否定され、スポット列傾き検出用パターンQPが検出されるのを待つ。スポット列傾き検出用パターンQPが検出されると、ここでの判断は肯定され、ステップS507に移行する。なお、ここでの検出を「最初の検出」という。
【0131】
このステップS507では、タイマカウンタΔtを初期化(0リセット)する。なお、タイマカウンタΔtの値は、所定の時間(例えば、2m秒)毎に起動されるタイマ割り込み処理内でカウントアップされる。
【0132】
次のステップS509では、受光部D1の出力信号及び受光部D11の出力信号を参照し、スポット列傾き検出用パターンQPを検出したのが検出用光スポットS1であるか否かを判断する。スポット列傾き検出用パターンQPを検出したのが検出用光スポットS1であれば、ここでの判断は肯定され、ステップS511に移行する。
【0133】
このステップS511では、スポット列傾き検出用パターンQPを最初に検出したのが検出用光スポットS1であることを意味する「1」をフラグfにセットする。
【0134】
次のステップS515では、受光部D1及び受光部D11のうち、最初の検出を行った受光部とは別の受光部(ここでは、受光部D11)の出力信号を参照し、他方の検出用光スポット(ここでは、検出用光スポットS11)でスポット列傾き検出用パターンQPが検出されたか否かを判断する。スポット列傾き検出用パターンQPが検出されていなければ、ここでの判断は否定され、スポット列傾き検出用パターンQPが検出されるのを待つ。スポット列傾き検出用パターンQPが検出されると、ここでの判断は肯定され、ステップS517に移行する。
【0135】
このステップS517では、タイマカウンタΔt及びフラグf1の内容を保存する。
【0136】
次のステップS519では、反射型光学センサにおける発光部E1と発光部E11を消灯させる。そして、光スポット列の傾き検出処理を終了し、ステップS307に移行する。
【0137】
なお、上記ステップS509において、スポット列傾き検出用パターンQPを検出したのが検出用光スポットS11であれば、ステップS509での判断は否定され、ステップS513に移行する。
【0138】
このステップS513では、スポット列傾き検出用パターンQPを最初に検出したのが検出用光スポットS11であることを意味する「11」をフラグfにセットする。そして、上記ステップS515に移行する。
【0139】
図22に戻り、ステップS307では、3つの反射型光学センサについて、それぞれの光スポット列の傾き検出処理における検出結果に基づいて、γ調整処理を行う。
【0140】
ここでは、光スポット列の傾き検出処理で得られたタイマカウンタΔtの値、フラグfの値、発光部E1と発光部E11の主方向に関する中心間距離L、及び中間転写ベルト2040の移動速度Vから、次の(1)式を用いて、主方向に対する光スポット列の傾斜角θγ(図24参照)を算出する。
【0141】
Δt=L×tanθγ/V ……(1)
【0142】
なお、発光部E1と発光部E11が周期τで順次点灯/消灯がなされる場合には、周期τに対応する距離だけスポット列傾き検出用パターンQPが移動するため、受光部D1の出力と受光部D11の出力との間の時間差Δt’は、次の(2)式で示される。
【0143】
Δt’=L×tanθγ/V+τ ……(2)
【0144】
そして、光スポット列が主方向に平行となるように、すなわち、光スポット列の傾斜の向きと逆の向きに角度θγだけ反射型光学センサの本体部が回動されるように、γ回転駆動部のステッピングモータを制御する。なお、ステッピングモータの駆動量と本体部が回動される角度との関係は、予め求められプリンタ制御装置2090のROMに格納されている。
【0145】
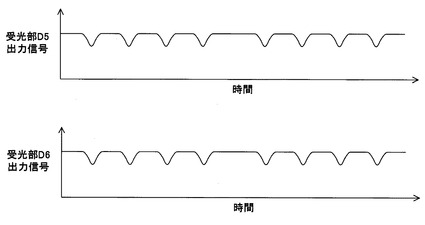
次のステップ309では、3つの反射型光学センサについて、それぞれ位置ずれ検出処理を行う。ここでは、図25に示されるように、主方向に関して、位置ずれ検出用パターンPPの中心位置が検出用光スポットS5と検出用光スポットS6の中間位置と略一致しているものとする。この場合は、各反射型光学センサにおける発光部E5と発光部E6を時分割で点灯/消灯させる。発光部E5からの検出用光S5及び発光部E6からの検出用光S6は、中間転写ベルト2040が回転するにつれて、すなわち、時間が経過するとともに、ライン状パターンLPK1〜LPY2を順次照明する。
【0146】
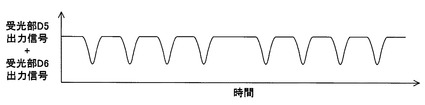
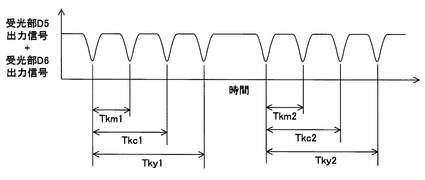
一例として図26に、このときの受光部D5及び受光部D6の出力信号の時間変化(出力波形)が示されている。そして、受光部D5の出力波形と受光部D6の出力波形を加算する(図27参照)。
【0147】
そして、ライン状パターンLPK1を検出してからライン状パターンLPM1を検出するまでの時間Tkm1、ライン状パターンLPK1を検出してからライン状パターンLPC1を検出するまでの時間Tkc1、ライン状パターンLPK1を検出してからライン状パターンLPY1を検出するまでの時間Tky1を求める(図28参照)。
【0148】
さらに、ライン状パターンLPK2を検出してからライン状パターンLPM2を検出するまでの時間Tkm2、ライン状パターンLPK2を検出してからライン状パターンLPC2を検出するまでの時間Tkc2、ライン状パターンLPK2を検出してからライン状パターンLPY2を検出するまでの時間Tky2を求める(図28参照)。
【0149】
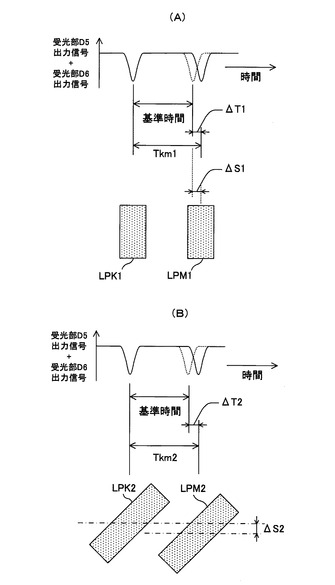
そして、時間Tkm1、時間Tkc1、及び時間Tky1をそれぞれ予め得られている基準時間と比較し、その時間差ΔT1から、次の(3)式を用いて、ブラックのトナー画像に対する、副方向に関するマゼンタ、シアン、及びイエローの各トナー画像の位置ずれ量ΔS1を求める(図29(A)参照)。ここで、Vは中間転写ベルト2040の副方向への移動速度である。
【0150】
ΔS1=V・ΔT1 ……(3)
【0151】
また、時間Tkm2、時間Tkc2、及び時間Tky2をそれぞれ予め得られている基準時間と比較し、その時間差ΔT2から、次の(4)式を用いて、ブラックのトナー画像に対する、主方向に関するマゼンタ、シアン、及びイエローの各トナー画像の位置ずれ量ΔS2を求める(図29(B)参照)。ここで、θはライン状パターンの主方向に対する傾斜角(ここでは、45°)である。
【0152】
ΔS2=V・ΔT2・cotθ ……(4)
【0153】
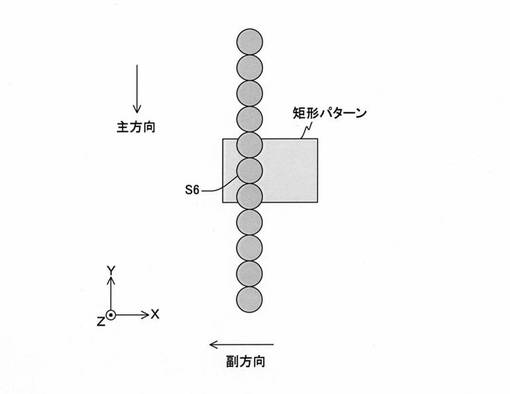
次のステップS311では、トナー濃度の検出処理を行う。ここでは、反射型光学センサ2245bのみが使用される。また、図30に示されるように、主方向に関して、矩形パターンの中心と検出用光スポットS6の中心とが略一致しているものとする。そこで、ここでは、発光部E6のみが点灯される。
【0154】
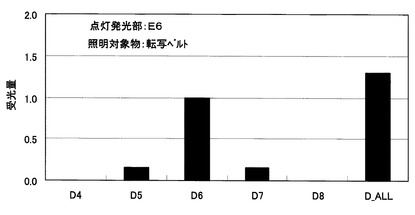
発光部E6のみが点灯され、検出用光S6が中間転写ベルト2040を照明したときの、受光部D4〜D8の受光量が図31に示されている。なお、ここでの受光部D6の受光量を「1」とする。また、D_ALLは、5個の受光部D4〜D8の受光量の和である。
【0155】
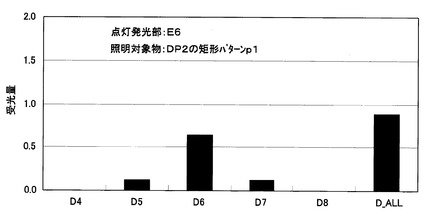
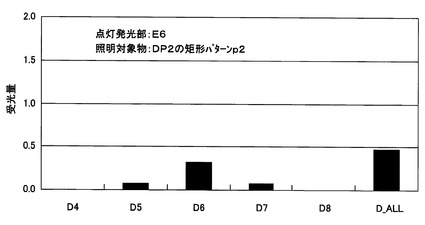
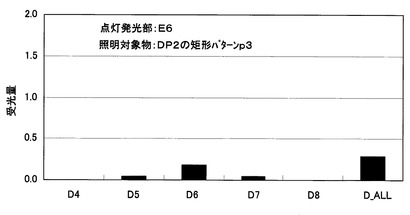
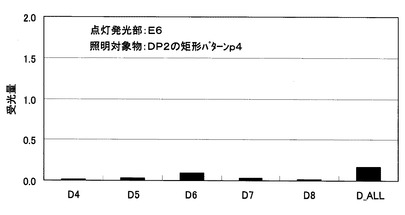
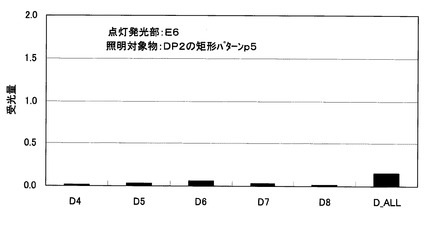
発光部E6のみが点灯され、検出用光S6が濃度検出用パターンDP2の矩形パターンp1〜p5を照明したときの受光部D4〜D8の受光量が図32〜図36に示されている。
【0156】
なお、以下では、照明対象物が中間転写ベルト2040のときの各受光部の受光量をそれぞれ「基準受光量」ともいい、照明対象物が矩形パターンのときの各受光部の受光量をそれぞれ「検出受光量」ともいう。
【0157】
ここでは、矩形パターン毎に、サンプリング毎に、各受光部の検出受光量を拡散反射光による受光量と正反射光による受光量とに分離する。以下では、照明対象物が濃度検出用パターンDP2の矩形パターンp1のときを例として説明する。
【0158】
(1)受光部D6の受光量について
受光部D6は点灯発光部E6に対応する受光部であるため、この受光部D6の検出受光量は全て正反射光による受光量であると仮定する。一般的に、トナーパターンの反射率は、中間転写ベルト2040の反射率よりも低いため、受光部D6の検出受光量は1(基準受光量)よりも小さくなっている。
【0159】
(2)受光部D4及び受光部D8の受光量について
受光部D4及び受光部D8では、基準受光量はいずれも0であった。そこで、受光部D4及び受光部D8の検出受光量は、いずれも、その全てが拡散反射光による受光量である。
【0160】
(3)受光部D5の受光量について
受光部D5では、基準受光量は0ではなかった。そこで、受光部D5の検出受光量は、正反射光と拡散反射光とが混在した光による受光量である。
【0161】
正反射光について考えてみると、受光部D5の検出受光量と受光部D6の検出受光量の比率は、受光部D5の基準受光量と受光部D6の基準受光量の比率と一致するはずである。
【0162】
そこで、受光部D5の基準受光量を受光部D6の基準受光量で除した値(比率Aとする)を求める。
【0163】
そして、受光部D6の検出受光量に比率Aを乗じる。ここで得られた値が、受光部D5の検出受光量に含まれる正反射光による受光量(受光量aとする)である。
【0164】
次に、受光部D5の検出受光量から上記受光量aを差し引く。ここで得られた値が、受光部D5の検出受光量に含まれる拡散反射光による受光量である。
【0165】
(4)受光部D7の受光量について
この受光部では、基準受光量は0ではなかった。そこで、受光部D7の検出受光量は、正反射光と拡散反射光とが混在した光による受光量である。
【0166】
正反射光について考えてみると、受光部D7の検出受光量と受光部D6の検出受光量の比率は、受光部D7の基準受光量と受光部D6の基準受光量の比率と一致するはずである。
【0167】
そこで、受光部D7の基準受光量を受光部D6の基準受光量で除した値(比率Bとする)を求める。
【0168】
そして、受光部D6の検出受光量に比率Bを乗じる。ここで得られた値が、受光部D7の検出受光量に含まれる正反射光による受光量(受光量bとする)である。
【0169】
次に、受光部D7の検出受光量から上記受光量bを差し引く。ここで得られた値が、受光部D7の検出受光量に含まれる拡散反射光による受光量である。
【0170】
このようにして、各受光部の検出受光量を、正反射光による受光量と拡散反射光による受光量とに分離することができる。
【0171】
濃度検出用パターンDP2の矩形パターンp1〜p5における、正反射光による受光量及び拡散反射光による受光量が、図37〜図46に示されている。
【0172】
次に、矩形パターン毎に、点灯発光部毎に、サンプリング毎に、正反射光による受光量の合計値(M1とする)、及び拡散反射光による受光量の合計値(M2とする)を求める。
【0173】
各照明対象物の正反射光による受光量の合計値M1が図47に示されている。また、照明対象物が中間転写ベルト2040のときの合計値M1を1としたときの、各矩形パターンの正反射光による受光量の合計値M1が図48に示されている。これらによると、合計値M1はトナー濃度が高くなるにつれて単調に減少している。これは、トナー濃度が高いほど多くのトナーが付着しているため、正反射する光が減少するためであり、トナー濃度と合計値M1は1対1で対応している。そこで、合計値M1の計測値から、その照明対象物のトナー濃度を知ることができる。
【0174】
各照明対象物の拡散反射光による受光量の合計値M2が図49に示されている。これによると、合計値M2は、トナー濃度に対して単調な関数になっていない。なお、直感的には、トナー濃度が高いほど多くのトナーが付着しているため、拡散反射する光が増加し、合計値M2はトナー濃度が高くなるにつれて単調に増加すると思われがちであるが、拡散反射光による受光量は、検出受光量から正反射光による受光量を減算して求めているため、単調に増加していないものと考えられる。そこで、合計値M2の計測値から、その照明対象物のトナー濃度を知ることは、不可能ではないが必ずしも容易ではない。
【0175】
点灯発光部がE6のときの各照明対象物の合計値M2/合計値M1が図50に示されている。また、合計値M2/合計値M1の最大値を1としたときの、各照明対象物の合計値M2/合計値M1が図51に示されている。これらによると、合計値M2/合計値M1はトナー濃度が高くなるにつれて単調に増加している。そこで、合計値M2/合計値M1からでも、その照明対象物のトナー濃度を知ることができる。
【0176】
なお、合計値M1とトナー濃度との関係、あるいは(合計値M2/合計値M1)とトナー濃度との関係があらかじめ求められ、濃度テーブルとしてプリンタ制御装置2090のROMに格納されている。
【0177】
そこで、プリンタ制御装置2090は、上記濃度テーブルを参照し、矩形パターン毎に、サンプリング毎に、合計値M1、あるいは(合計値M2/合計値M1)に基づいてトナー濃度を求める。これによって、トナー濃度検出処理を終了し、ステップS313に移行する。
【0178】
このステップS313では、画像形成プロセス条件を調整する。
【0179】
ここでは、先ず、上記位置ずれ検出処理で検出された位置ずれ量に基づいて、ブラックのトナー画像に対する副方向のずれ量が0となるように、例えば、対応する画像形成ステーションにおける画像の書き出しタイミングの変更を走査制御装置に指示する。また、ブラックのトナー画像に対する主方向のずれ量が0となるように、例えば、対応する画像形成ステーションにおける画素クロックの位相調整を走査制御装置に指示する。
【0180】
次に、上記濃度検出処理で得られたトナー濃度に基づいて、トナーの色毎に、トナー濃度のずれ量を求める。そして、トナー濃度のずれ量が0となるように、或いは、トナー濃度のずれ量が許容限内となるようにトナー濃度に関連する各種調整を行う。
【0181】
例えば、トナー濃度のずれ量に応じて、対応する画像形成ステーションにおいて、光源から射出される光束のパワー、光源に供給される駆動パルスにおけるデューティ、帯電バイアス、現像バイアス(例えば、特開2009−216930号公報参照)の少なくともいずれかを調整する。
【0182】
ところで、画像濃度を維持するための画像濃度制御には、現像ポテンシャル制御、及び階調制御がある。
【0183】
現像ポテンシャル制御では、所望の画像濃度(例えばベタ濃度)を確保するために、現像ポテンシャル(現像バイアス−ベタ露光電位)の制御を行う。すなわち、濃度検出用パターンから得られたトナー濃度と現像ポテンシャルとの関係より、現像γ(現像ポテンシャルを横軸、トナー濃度を縦軸としたときの傾き)と現像開始電圧Vk(現像ポテンシャルを横軸(x軸)、トナー濃度を縦軸(y軸)としたときのx切片)を求める。そして、次の(5)式を用いて、所望の画像濃度を確保するために必要な現像ポテンシャルを決定し、これに基づいて、作像条件(露光パワー、帯電バイアス、現像バイアス)を決定している。
【0184】
必要な現像ポテンシャル[−kV]=所望の画像濃度(トナー濃度)[mg/cm2]/現像γ[(mg/cm2)/(−kV)]+現像開始電圧Vk[−kV] ……(5)
【0185】
トナーの帯電量と現像ポテンシャルとが一定であれば、現像γはほぼ維持されるが、温度や湿度の変化がある環境ではトナーの帯電量の変化が避けられず、中間調領域の階調性が変化してしまう。それを補正するために階調制御が行われる。階調制御も現像ポテンシャル制御と同等の濃度検出用パターンを用いることができる。
【0186】
階調制御では、得られた階調性と目標とする階調性との偏差がなくなるように階調補正用LUT(ルック・アップ・テーブル)が適宜変更される。具体的には、その都度、新しい階調補正用LUTに書き換える方法や、予め用意した複数の階調補正用LUTから最適なものを選択する方法などがある。
【0187】
以上説明したように、本実施形態に係る反射型光学センサによると、本体部及びγ回転駆動部を有している。本体部は、主方向に沿って等間隔Leで配置された11個の発光部(E1〜E11)を含む照射系、11個の照明用マイクロレンズ(LE1〜LE11)を含む照明光学系、11個の受光用マイクロレンズ(LD1〜LD11)を含む受光光学系、及び11個の受光部(D1〜D11)を含む受光系などを備えている。
【0188】
γ回転駆動部は、回転テーブル、ギア、ステッピングモータなどを有し、本体部をその中心を通り、Z軸に平行な軸まわりに回動させる。
【0189】
これにより、対向する中間転写ベルト2040の表面に平行な面内で本体部を回動させることが可能となり、中間転写ベルト2040上でのスポット列方向を、容易に精度良く、主方向に対して平行とすることができる。
【0190】
そこで、トナーパターンの大きさを小さくして不寄与トナーの消費量を抑制しつつ、トナーパターンの位置検出精度を向上させることができる。
【0191】
また、本実施形態に係るカラープリンタ2000によると、4つの感光体ドラム(2030a、2030b、2030c、2030d)と、各感光体ドラムに対して画像情報に応じて変調された光束を主走査方向に走査し、潜像を形成する光走査装置2010と、潜像にトナーを付着させトナー画像を生成する4つの現像ローラ(2033a、2033b、2033c、2033d)と、各感光体ドラムからトナー画像が転写される中間転写ベルト2040と、中間転写ベルト2040に転写されたトナーパターンを検出するためのトナーパターン検出器2245と、全体を統括的に制御するプリンタ制御装置2090などを備えている。
【0192】
トナーパターン検出器2245は、3つの反射型光学センサ(2245a、2245b、2245c)を有している。
【0193】
プリンタ制御装置2090は、位置ずれ検出用パターンPPを検出するのに先立ってスポット列傾き検出用パターンQPを検出し、主方向に対する光スポット列の傾き情報を取得する。そして、プリンタ制御装置2090は、光スポット列が主方向に平行となるようにγ回転駆動部のステッピングモータを制御する。
【0194】
これにより、トナーパターンが小さくても位置ずれの検出精度を向上させることができる。その結果、カラープリンタ2000は、高い画像品質を維持しつつ、ランニングコストを低減することができる。
【0195】
また、この場合は、γ回転駆動部の回転テーブルを手動で回動調整することができない狭いスペースにも反射型光学センサを配置することが可能であり、画像形成装置のレイアウト自由度を増すことができる。
【0196】
また、この場合は、人為的な調整ミスの防止、調整時間の削減等の効果が期待できる。また、出荷前のみならず、出荷後にも調整が可能となる。
【0197】
そして、出荷直後に行うことで、輸送中や設置に伴う衝撃による反射型光学センサの取り付け位置の変化を調整しなおすことができる。
【0198】
また、定期的に光スポット列の傾き検出処理及びγ調整処理を実行することで、反射型光学センサの取り付け位置の経時変化や、温度変化に代表される環境変化による取り付け位置の変化を調整することができる。これにより、長期的に高い位置検出精度を維持するこができる。
【0199】
また、スポット列傾き検出用パターンQPがブラックトナーで形成されているため、反射率の低下量が大きくなり、検出精度を高くすることができる。
【0200】
また、光スポット列の傾き検出処理において、2つの発光部を同時に点灯させているため、順次点灯/消灯させる場合に比べて、処理時間を短縮することができる。そして、γ調整処理での演算を単純化することができる。
【0201】
また、位置ずれ検出用パターン及び濃度検出用パターンの主方向の寸法を小さくすることができるため、「不寄与トナー」の量を低減させることができる。
【0202】
なお、受光部の検出受光量を拡散反射光による受光量と正反射光による受光量とに分離する方法については、上記実施形態での方法に限定されるものではない。
【0203】
また、上記実施形態における光スポット列の傾き検出処理及びγ調整処理は、操作者からの指示によって任意のタイミングで行われても良い。このとき、該指示は、上位装置からなされても良いし、カラープリンタ2000の操作パネルを介してなされても良い。
【0204】
また、上記実施形態では、位置ずれ検出処理において2つの発光部を点灯発光部とする場合について説明したが、これに限定されるものではなく、図52に示されるように、3つの発光部を点灯発光部としても良い。この場合は、検出精度をさらに高くすることができる。
【0205】
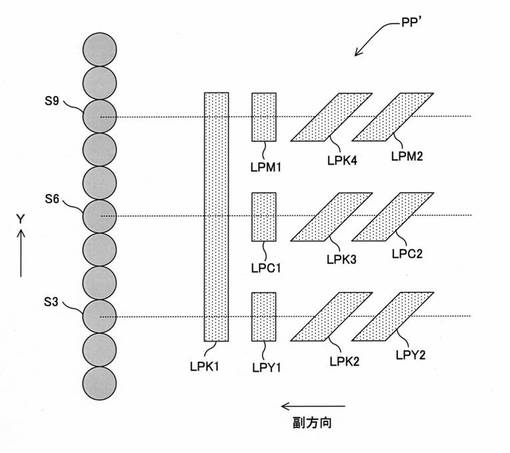
また、上記実施形態において、前記位置ずれ検出用パターンPPに代えて、一例として図53に示される位置ずれ検出用パターンPP’を用いても良い。この位置ずれ検出用パターンPP’では、複数のラインパターンが2次元配列されている。ラインパターンLPK1は、主方向の長さが3.2mm、副方向の長さが0.5mmである。また、ラインパターンLPM1、ラインパターンLPC1、ラインパターンLPY1は、主方向の長さが1.0mm、副方向の長さが0.5mmである。この主方向の長さは、発光部間隔Leと検出用光スポットの大きさの和(=0.8mm)よりも大きい。
【0206】
そして、副方向に関する全体の長さが、位置ずれ検出用パターンPP’は、位置ずれ検出用パターンPPの1/2倍となるため、位置ずれ検出用パターンPP’を用いることにより、位置ずれ検出処理に要する時間を上記実施形態の約1/2倍とすることができる。
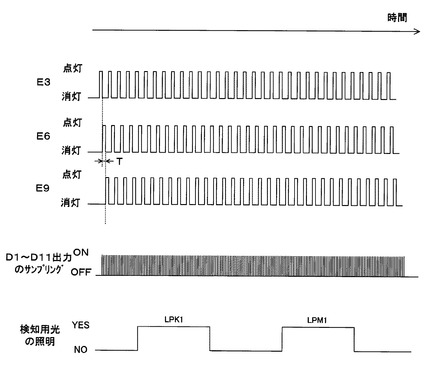
【0207】
この場合は、一例として図54に示されるように、位置ずれ検出処理では、3つの発光部(E3、E6、E9)が点灯発光部となる。3つの発光部は、一例として図55に示されるように、時分割で点灯/消灯が繰り返される。そして、受光部D1〜D11は、発光部の点灯タイミングに合わせてサンプリングされる。
【0208】
また、反射型光学センサにおけるγ回転駆動部の回動機構は、上記実施形態に限定されるものではない。要するに、本体部を、対向する中間転写ベルト2040の表面に平行な面内で回動させることができれば良い。
【0209】
また、上記実施形態では、各濃度検出用パターンDPが5個の矩形パターンを有する場合について説明したが、これに限定されるものではない。
【0210】
また、上記実施形態では、11個の照明用マイクロレンズ(LE1〜LE11)と11個の受光用マイクロレンズ(LD1〜LD11)が一体化されている場合について説明したが、これに限定されるものではない。
【0211】
また、上記実施形態では、1つの反射型光学センサが11個の発光部及び受光部を有する場合について説明したが、これに限定されるものではない。発光部及び受光部の数は、3つ以上であることが必須であるが、上限は、反射型光学センサによる主方向の検出範囲に応じて適宜定めることができる。
【0212】
また、上記実施形態では、全ての反射型光学センサが同一個数の発光部を有する場合について説明したが、これに限定されるものではない。
【0213】
また、上記実施形態において、組み立て工程や出荷時検査工程等において、検査員が手動でγ回転駆動部の回転テーブルを回動調整することができる。このとき、該検査員は、位置検出用のテストパターンを基準とした基準治具を用いて、反射型光学センサの取り付け状態を測定し、主方向を長手方向とするライン状パターンに対して光スポット列が平行となるように回転テーブルを回動調整する。
【0214】
あるいは、組み立て工程や出荷時検査工程等において、反射型光学センサが取り付けられている画像形成装置が動作できる状態であれば、反射型光学センサを用いて、上記と同様な位置ずれ検出処理を行う。このとき、検査員は、反射型光学センサの出力信号を、外部モニタ等で確認しながら、主方向を長手方向とするライン状パターンに対して光スポット列が平行となるように回転テーブルを回動調整する。
【0215】
また、上記実施形態では、γ調整処理において、光スポット列が主方向に平行となるようにする場合について説明したが、位置ずれ検出用パターンの第1のパターン群を構成するライン状パターンが主方向に対して傾斜しているときには、光スポット列が該ライン状パターンに平行となるようにγ調整処理を行っても良い。
【0216】
また、上記実施形態では、中間転写ベルトの表面が滑らかな場合について説明したが、これに限らず、中間転写ベルトの表面が滑らかでなくても良い。この場合であっても、上記実施形態と同様にして位置ずれを検出することができる。また、中間転写ベルトの表面の一部が滑らかであっても良い。
【0217】
また、上記実施形態において、反射型光学センサに処理装置を設け、プリンタ制御装置2090での処理の少なくとも一部を、該処理装置が行っても良い。
【0218】
また、上記実施形態において、プリンタ制御装置2090での処理の少なくとも一部を、走査制御装置が行っても良い。
【0219】
また、上記実施形態では、濃度検出用パターンが位置Y2に形成される場合について説明したが、これに限定されるものではない。例えば、濃度検出用パターンが位置Y1あるいは位置Y3に形成されても良い。
【0220】
また、上記実施形態では、濃度検出用パターンが位置Y2のみに形成される場合について説明したが、これに限定されるものではない。例えば、濃度検出用パターンが、さらに位置Y1あるいは位置Y3にも形成されても良い。
【0221】
また、上記実施形態では、4色のトナーが用いられる場合について説明したが、これに限定されるものではない。例えば、5色あるいは6色のトナーが用いられる場合であっても良い。
【0222】
また、上記実施形態では、トナーパターン検出器2245が、中間転写ベルト2040上のトナーパターンを検出する場合について説明したが、これに限定されるものではなく、感光体ドラム表面のトナーパターンを検出しても良い。なお、感光体ドラムの表面は、中間転写ベルト2040と同様に正反射体に近い。
【0223】
また、上記実施形態において、トナーパターンを記録紙に転写し、該記録紙上のトナーパターンを、トナーパターン検出器2245で検出しても良い。
【0224】
また、上記実施形態では、画像形成装置が、感光体ドラム上のトナー画像を一旦中間転写ベルト上に転写し、この中間転写ベルト上からシート状の記録媒体へ転写する中間転写方式の画像形成装置である場合について説明したが、これに限定されるものではない。例えば、感光体ドラム上のトナー画像を直接にシート状の記録媒体上に転写する直接転写方式の画像形成装置であっても良い。この場合は、シート状の記録媒体を搬送する無端ベルトである直接転写ベルトが移動体となる。
【0225】
また、上記実施形態では、画像形成装置として、カラープリンタ2000の場合について説明したが、これに限らず、プリンタ以外の画像形成装置、例えば、複写機、ファクシミリ、又は、これらが集約された複合機であっても良い。
【0226】
また、上記実施形態では、光スポット列の傾き検出処理において、発光部E1と発光部E11のみを点灯させる場合について説明したがこれに限定されるものではなく、例えば、さらに発光部E6を点灯させても良い。また、全ての発光部を点灯させても良い。この場合は、スポット列の傾斜角をさらに精度良く求めることができる。
【0227】
また、上記実施形態では、光スポット列の傾き検出処理において、両端の2つの発光部を点灯発光部とする場合について説明したが、これに限定されるものではない。但し、両端の2つの発光部を点灯発光部とするのが、検出精度の点から好ましい。
【0228】
また、上記実施形態では、スポット列傾き検出用パターンQPの主方向に関する長さが、両端の発光部間の距離よりも長い場合について説明したが、これに限定されるものではない。但し、スポット列傾き検出用パターンQPの主方向に関する長さを両端の発光部間の距離よりも長くするほうが、検出精度の点から好ましい。
【0229】
また、上記実施形態では、スポット列傾き検出用パターンQPが、ブラックトナーで形成される場合について説明したが、これに限定されるものではない。但し、ブラックトナーはカラートナーに対して吸収が大きいため、受光部出力の低下が大きく、検知感度が高い。また、色ずれは、各色の相対的なずれによって表現されており、基準となる色としてブラックが採用されることが一般的であり、その基準と合わせることが好ましい。
【0230】
また、上記実施形態において、位置ずれ検出処理とトナー濃度の検出処理の順番が逆であっても良い。この場合は、その順番に応じてトナーパターンが形成される。
【0231】
また、上記実施形態において、トナーパターンの主方向に関する位置を推定するためのパターンが形成されても良い。
【0232】
また、上記実施形態において、トナー濃度の検出処理では、1つの矩形パターンについて、受光部出力のサンプリングが1回であっても良いし、複数回であっても良い。複数回のときは、得られた濃度データの全てを平均化しても良いし、最大値及び最小値の少なくとも一方を除いて平均化しても良い。
【産業上の利用可能性】
【0233】
以上説明したように、本発明の反射型光学センサによれば、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させるのに適している。本発明の画像形成装置によれば、高い画像品質を維持しつつ、ランニングコストを低減するのに適している。
【符号の説明】
【0234】
2000…カラープリンタ(画像形成装置)、2010…光走査装置(テストパターン作成装置)、2030a〜2030d…感光体ドラム、2040…中間転写ベルト(移動体)、2090…プリンタ制御装置(調整装置、制御装置)、2245…トナーパターン検出器、2245a、2245b、2245c…反射型光学センサ、D1〜D11…受光部、E1〜E11…発光部、LD1〜LD11…受光用マイクロレンズ、LE1〜LE11…照明用マイクロレンズ、p1〜p5…矩形パターン、QP…スポット列傾き検出用パターン(調整用パターン)、Rma,Rmb,Rmc…γ回転駆動部(駆動系)。
【先行技術文献】
【特許文献】
【0235】
【特許文献1】特開2007−286176号公報
【特許文献2】特開2002−174936号公報
【特許文献3】特開2010−039460号公報
【技術分野】
【0001】
本発明は、反射型光学センサ及び画像形成装置に係り、更に詳しくは、移動体上の画像を検出する反射型光学センサ、及び該反射型光学センサを備える画像形成装置に関する。
【背景技術】
【0002】
電子写真の画像記録において、高精細な画像品質を得るための画像形成手段として、レーザ光を用いた画像形成方法が広く用いられている。電子写真の場合、感光性を有するドラムの軸方向に、光走査装置を用いてレーザ光を走査しつつ、ドラムを回転させて、潜像を形成する方法が一般的である。
【0003】
そして、該潜像はトナーによって顕像化され、トナー画像となり、記録媒体である紙に転写された後、定着される。
【0004】
この場合、ドラム上のトナー画像は、紙の所望の位置に正しく転写される必要がある。このような適正位置へのトナー画像の転写は、ドラム上におけるトナー画像の転写されるべき紙に対する位置が適正に把握されていなければ実現できない。
【0005】
また、互いに色の異なる複数のトナー画像を重ね合わせて、多色画像を形成する場合には、トナー画像毎に位置を把握して適正な重ね合わせが必要となる。
【0006】
重ね合わせられる複数のトナー画像相互の位置関係が適切に調整されていないと、画像の書き出し位置が相互にずれてしまうレジストずれ、画像の寸法誤差となる倍率ずれ、さらにこれらが複数のトナー画像間で相対的にずれることによる色ずれなど、様々な異常画像が生じる。
【0007】
トナー画像の位置を適正に制御するため、従来から位置検知用のテストパターンを形成し、これに光を照射して反射光を受光し、受光量に対して所定のアルゴリズムによる演算を施して、トナー画像の位置を求めることが行われていた。
【0008】
トナー画像の位置検出に用いられる反射型光学センサは、従来から種々のタイプのものが提案されている。例えば、特許文献1には、正反射光検知方式或いは拡散反射光検知方式の反射型光学センサが開示されている。これは、LDやLEDからなる1つの光源と、検知方式に応じて光源との配置関係や受光部の構成が変更される受光センサとから構成されている。
【0009】
このタイプの反射型光学センサでは、テストパターンを照明する光スポットの大きさは2〜3mmが通常であった。一方、形成されるテストパターンの大きさは、そのテストパターンの移動方向(例えば、中間転写ベルトの移動方向;副方向)に直交する方向(主方向)に関して、一般的に15mm以上であった。
【0010】
また、例えば、特許文献2には、主方向の大きさが20mm、副方向の大きさ(幅)が1mmのライン状のトナーマーク(以下、「パッチ」ともいう)が複数配置されたテストパターンが開示されている。
【0011】
テストパターンの主方向の大きさを光スポットの同方向の大きさより大きくし、テストパターンと光スポットに相対的な位置誤差があっても、光スポットによりテストパターンを適正に照明できることを意図したものである。なお、上記相対的な位置誤差としては、(1)反射型光学センサの取り付け誤差、及び発光部の取り付け誤差による光の照射方向のずれ、などによって発生する光スポットの主方向の照射位置誤差や、(2)パッチ形成位置ずれ、及び感光体ドラムや中間転写ベルトの蛇行、などによって発生するパッチの主方向の位置誤差がある。
【0012】
ところで、テストパターンを形成するのに用いられるトナーは、本来の画像形成に寄与しない不寄与トナーである。このため、テストパターンの面積が大きくなれば、それに比例して不寄与トナーの消費量も多くなる。そこで、テストパターンの面積を小さくすることは、トナー消費量の観点から、画像形成に係るランニングコストの低減につながる。
【0013】
不寄与トナーの消費量を低減するためには、テストパターンを構成する各トナーマークの面積を小さくすれば良いが、テストパターンと光スポットに相対的な位置誤差があっても光スポットによりテストパターンが適正に照明されるように、トナーマークの主方向の大きさを光スポットより大きくする必要があり、トナーマークを小さくすることには限度があった。換言すれば、光スポットとの位置誤差に対する余裕度を持たせるという考え方がトナーマークの小面積化を阻害していたといえる。
【0014】
そこで、本出願人は、3個以上の発光部と3個以上の受光部を有する反射型光学センサを用い、従来よりも小さいテストパターンの位置検出を行うことを提案した(特許文献3参照)。
【0015】
特許文献3に開示されている反射型光学センサは、小さい光スポットでテストパターンを照明し、その反射光を複数の受光部で受光し、該複数の受光部の出力分布に基づいて正確な位置を演算的に割り出すという技術思想に基づいている。そして、主方向に沿って一列に並んでいる複数の光スポットの照明領域をテストパターンが通過するため、突発的な位置ずれがあってもテストパターンを確実に照明することができる。また、複数の受光部の出力分布に基づいてテストパターンの位置を判断するため、小さなテストパターンでも感度良く位置検出ができる。
【0016】
このとき、発光部の発光波長と、受光部のピーク感度波長とを略一致させることにより、受光部から出力される光電変換信号のレベルを最大限に高めることができ、位置検出精度を高めることができる。
【発明の概要】
【発明が解決しようとする課題】
【0017】
ところで、3個以上の発光部と3個以上の受光部を有する反射型光学センサでは、テストパターンを照明する光スポットが一列に並んでいるため、その並び方向(スポット列方向)と、ライン状のトナーマークの長手方向との関係が既知であることが必要である。
【0018】
すなわち、図56に示されるような従来から知られるようなテストパターンにおいて、光スポット列は、トナーマークYに対しては平行に、トナーマークNに対して45度傾いていることが必要である。
【0019】
この理由について以下に説明する。
【0020】
例えば、5つの発光部と5つの受光部を有する反射型光学センサでは、ある1つの発光部(例えば、発光部3)を点灯させると、複数の受光部(例えば、受光部2、受光部3、受光部4の3つの受光部)で反射光を受光することができる。
【0021】
平滑な移動材に対して光を照射したときの各受光部の出力例が図57(A)に示され、カラートナーのベタのテストパターンに対して光を照射したときの各受光部の出力例が図57(B)に示されている。なお、各受光部の出力分布は照射系の構成などにより調整可能である。
【0022】
ここで、発光部2と発光部3と発光部4を同時に点灯させた場合を考える。
【0023】
トナーマークYが検出される際の受光部2、受光部3、受光部4の出力の時間変化が図58に示されている。ここでは、トナーマークYと光スポット列が平行であるため、各受光部の出力は時間的に同一である。
【0024】
トナーマークNが検出される際の受光部2、受光部3、受光部4の出力の時間変化が図59に示されている。ここでは、トナーマークNが光スポット列に対して45度傾斜しているため、各受光部の出力は、発光部の間隔pとトナーマークNの移動速度vで決まる時間t(t=p/v)だけ順次遅れる。
【0025】
複数の発光部を点灯させたときの受光部出力からトナーマークの位置を算出する場合には、図58及び図59に示されるような受光部出力の時間的な情報が必要不可欠である。
【0026】
すなわち、1つのトナーマークに対して複数の発光部を同時に点灯させ、得られた複数の受光部出力を合成してトナーマークの位置検出を行う場合、主方向に関する発光部の位置と、各発光部に対応する受光部出力の時間的な情報がなくては、複数の受光部出力を適切に合成することができない。
【0027】
具体的には、図58の場合、各受光部出力は時間的に同一であるので、各受光部出力を単純に時間軸に対して加算すれば良い。図59の場合、各受光部出力は所定の時間間隔でずれているので、各受光部出力を時間軸に対してずらして加算していけば良い。
【0028】
ところで、図60に示されるように、光スポット列がトナーマークYに対して傾斜していると、各受光部出力は時間的にずれることとなる。このとき、各受光部出力を単純に時間軸に対して加算すると、信号幅が広がってしまい、検出精度が大きく低下する。この場合、トナーマークNを検出する際の各受光部出力も、上記時間tとは異なる時間のずれが生じることになる。通常、反射型光学センサを画像形成装置内の移動体(例えば、中間転写ベルト)に対向し、照射した光の反射光を受光するように取り付ける際、メカ公差内では取り付けができるものの、取り付けられた反射型光学センサからの光スポット列とトナーマークとの位置関係は不明である。そのため、光スポット列とトナーマークとの角度誤差に起因して、トナーマークの位置検出精度を高めることが困難であった。
【0029】
なお、特許文献1及び特許文献2に開示されている反射型光学センサでは、テストパターンを照明する光スポットが1つであるため、上述した受光部出力を合成する際の不都合はない。
【0030】
本発明は、かかる事情の下になされたもので、その第1の目的は、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させることができる反射型光学センサを提供することにある。
【0031】
その第2の目的は、高い画像品質を維持しつつ、ランニングコストを低減することができる画像形成装置を提供することにある。
【課題を解決するための手段】
【0032】
本発明は、第1の観点からすると、第1の方向に移動する移動体上のパターンを検出するための反射型光学センサであって、前記第1の方向に直交する第2の方向に沿って配列された複数の発光部を含む照射系と、該照射系から射出され前記パターンで反射された光を受光する複数の受光部を含む受光系と、前記第1の方向及び前記第2の方向のいずれに対しても直交する第3の方向に平行な軸まわりに、前記照射系及び前記受光系を回動させることができる駆動系と、を備える反射型光学センサである。
【0033】
これによれば、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させることができる。
【0034】
本発明は、第2の観点からすると、画像情報に応じた画像形成条件で移動体上に画像を形成する画像形成装置において、前記移動体上のテストパターンを検出するための本発明の反射型光学センサと、前記反射型光学センサの受光系の出力信号に基づいて、前記画像形成条件を調整する調整装置と、を備えることを特徴とする画像形成装置である。
【0035】
これによれば、高い画像品質を維持しつつ、ランニングコストを低減することができる。
【図面の簡単な説明】
【0036】
【図1】本発明の一実施形態に係るカラープリンタの概略構成を説明するための図である。
【図2】プリンタ制御装置を説明するためのブロック図である。
【図3】光走査装置の概略構成を説明するための図(その1)である。
【図4】光走査装置の概略構成を説明するための図(その2)である。
【図5】光走査装置の概略構成を説明するための図(その3)である。
【図6】光走査装置の概略構成を説明するための図(その4)である。
【図7】トナーパターン検出器を説明するための図である。
【図8】反射型光学センサの配置位置を説明するための図である。
【図9】反射型光学センサを説明するための図である。
【図10】反射型光学センサの本体部を説明するための図(その1)である。
【図11】反射型光学センサの本体部を説明するための図(その2)である。
【図12】反射型光学センサの本体部を説明するための図(その3)である。
【図13】反射型光学センサの本体部を説明するための図(その4)である。
【図14】検出用光を説明するための図である。
【図15】反射型光学センサの本体部を説明するための図(その5)である。
【図16】図16(A)及び図16(B)は、それぞれ、反射型光学センサのγ回転駆動部を説明するための図である。
【図17】画像形成プロセス制御で用いられるトナーパターンを説明するための図である。
【図18】スポット列傾き検出用パターンQPを説明するための図である。
【図19】位置ずれ検出用パターンを説明するための図である。
【図20】各濃度検出用パターンにおける5つの矩形パターンを説明するための図である。
【図21】図21(A)及び図21(B)は、それぞれ、反射光を説明するための図である。
【図22】プリンタ制御装置によって行われる画像プロセス制御を説明するためのフローチャートである。
【図23】プリンタ制御装置によって行われる光スポット列の傾き検出処理を説明するためのフローチャートである。
【図24】光スポット列の傾斜角を説明するための図である。
【図25】検出用光スポットと位置ずれ検出用パターンの位置関係を説明するための図である。
【図26】位置ずれ検出処理での受光部D5及び受光部D6の出力信号を説明するための図である。
【図27】位置ずれ検出処理での受光部D5の出力信号と受光部D6の出力信号を加算した信号を説明するための図である。
【図28】位置ずれ検出方法を説明するための図である。
【図29】図29(A)及び図29(B)は、それぞれ副方向及び主方向の位置ずれ検出を説明するための図である。
【図30】検出用光スポットと矩形パターンの位置関係を説明するための図である。
【図31】照明対象物が中間転写ベルトのときの各受光部の受光量を説明するための図である。
【図32】照明対象物が濃度検出用パターンDP1の矩形パターンp1のときの各受光部の受光量を説明するための図である。
【図33】照明対象物が濃度検出用パターンDP1の矩形パターンp2のときの各受光部の受光量を説明するための図である。
【図34】照明対象物が濃度検出用パターンDP1の矩形パターンp3のときの各受光部の受光量を説明するための図である。
【図35】照明対象物が濃度検出用パターンDP1の矩形パターンp4のときの各受光部の受光量を説明するための図である。
【図36】照明対象物が濃度検出用パターンDP1の矩形パターンp5のときの各受光部の受光量を説明するための図である。
【図37】検出用光S6が矩形パターンp1で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
【図38】検出用光S6が矩形パターンp1で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
【図39】検出用光S6が矩形パターンp2で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
【図40】検出用光S6が矩形パターンp2で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
【図41】検出用光S6が矩形パターンp3で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
【図42】検出用光S6が矩形パターンp3で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
【図43】検出用光S6が矩形パターンp4で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
【図44】検出用光S6が矩形パターンp4で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
【図45】検出用光S6が矩形パターンp5で反射されたときの各受光部の受光量における正反射光成分を説明するための図である。
【図46】検出用光S6が矩形パターンp5で反射されたときの各受光部の受光量における拡散反射光成分を説明するための図である。
【図47】各照明対象物における正反射光成分の合計値M1を説明するための図である。
【図48】各照明対象物における正反射光成分の合計値M1の相対値を説明するための図である。
【図49】各照明対象物における拡散反射光成分の合計値M2を説明するための図である。
【図50】各照明対象物のM2/M1を説明するための図である。
【図51】各照明対象物のM2/M1の相対値を説明するための図である。
【図52】検出用光スポットと位置ずれ検出用パターンの位置関係の変形例を説明するための図である。
【図53】位置ずれ検出用パターンの変形例を説明するための図である。
【図54】検出用光スポットと変形例の位置ずれ検出用パターンの位置関係を説明するための図である。
【図55】図54に対応した各発光部の点灯タイミング、各受光部出力のサンプリングタイミングを説明するための図である。
【図56】通常の位置ずれ検出用パターンを説明するための図である。
【図57】図57(A)は平滑な移動材に対して光を照射したときの各受光部の出力例を説明するための図であり、図57(B)はカラートナーのベタのテストパターンに対して光を照射したときの各受光部の出力例を説明するための図である。
【図58】図56のトナーマークYに対して複数の光を照射したときの各受光部の出力例を説明するための図である。
【図59】図56のトナーマークNに対して複数の光を照射したときの各受光部の出力例を説明するための図である。
【図60】光スポット列の傾きによる不都合を説明するための図である。
【発明を実施するための形態】
【0037】
以下、本発明の一実施形態を図1〜図51に基づいて説明する。図1には、一実施形態に係る画像形成装置としてのカラープリンタ2000の概略構成が示されている。
【0038】
このカラープリンタ2000は、4色(ブラック、シアン、マゼンタ、イエロー)を重ね合わせてフルカラーの画像を形成するタンデム方式の多色カラープリンタであり、光走査装置2010、4つの感光体ドラム(2030a、2030b、2030c、2030d)、4つのクリーニングユニット(2031a、2031b、2031c、2031d)、4つの帯電装置(2032a、2032b、2032c、2032d)、4つの現像ローラ(2033a、2033b、2033c、2033d)、4つのトナーカートリッジ(2034a、2034b、2034c、2034d)、中間転写ベルト2040、転写ローラ2042、定着装置2050、給紙コロ2054、レジストローラ対2056、排紙ローラ2058、給紙トレイ2060、排紙トレイ2070、通信制御装置2080、トナーパターン検出器2245、温湿度センサ(図示省略)及び上記各部を統括的に制御するプリンタ制御装置2090などを備えている。
【0039】
なお、ここでは、XYZ3次元直交座標系において、各感光体ドラムの長手方向(回転軸方向)に沿った方向をY軸方向、4つの感光体ドラムの配列方向に沿った方向をX軸方向として説明する。
【0040】
通信制御装置2080は、ネットワークなどを介した上位装置(例えば、パソコン、スキャナ)及び公衆回線を介した情報機器(例えば、ファクシミリ装置)との双方向の通信を制御する。そして、通信制御装置2080は、受信した情報をプリンタ制御装置2090に通知する。
【0041】
プリンタ制御装置2090は、CPU、該CPUにて解読可能なコードで記述されたプログラム及び該プログラムを実行する際に用いられる各種データが格納されているROM、作業用のメモリであるRAM、アナログデータをデジタルデータに変換するAD変換器などを有している(図2参照)。そして、プリンタ制御装置2090は、上位装置及び情報機器からの要求に応じて各部を制御するとともに、上位装置及び情報機器からの画像情報を光走査装置2010に送る。
【0042】
温湿度センサは、カラープリンタ2000内の温度と湿度を検出し、プリンタ制御装置2090に通知する。
【0043】
感光体ドラム2030a、帯電装置2032a、現像ローラ2033a、トナーカートリッジ2034a、及びクリーニングユニット2031aは、組として使用され、ブラックの画像を形成する画像形成ステーション(以下では、便宜上「Kステーション」ともいう)を構成する。
【0044】
感光体ドラム2030b、帯電装置2032b、現像ローラ2033b、トナーカートリッジ2034b、及びクリーニングユニット2031bは、組として使用され、シアンの画像を形成する画像形成ステーション(以下では、便宜上「Cステーション」ともいう)を構成する。
【0045】
感光体ドラム2030c、帯電装置2032c、現像ローラ2033c、トナーカートリッジ2034c、及びクリーニングユニット2031cは、組として使用され、マゼンタの画像を形成する画像形成ステーション(以下では、便宜上「Mステーション」ともいう)を構成する。
【0046】
感光体ドラム2030d、帯電装置2032d、現像ローラ2033d、トナーカートリッジ2034d、及びクリーニングユニット2031dは、組として使用され、イエローの画像を形成する画像形成ステーション(以下では、便宜上「Yステーション」ともいう)を構成する。
【0047】
各感光体ドラムはいずれも、その表面に感光層が形成されている。すなわち、各感光体ドラムの表面がそれぞれ光走査装置2010による光走査の被走査面である。なお、各感光体ドラムは、不図示の回転駆動機構により、図1における面内で矢印方向(時計回り)に回転する。
【0048】
各帯電装置は、対応する感光体ドラムの表面をそれぞれ均一に帯電させる。
【0049】
光走査装置2010は、プリンタ制御装置2090からの多色の画像情報(ブラック画像情報、シアン画像情報、マゼンタ画像情報、イエロー画像情報)に基づいて、各色毎に変調された光束を、対応する帯電された感光体ドラムの表面にそれぞれ照射する。これにより、各感光体ドラムの表面では、光が照射された部分だけ電荷が消失し、画像情報に対応した潜像が各感光体ドラムの表面にそれぞれ形成される。ここで形成された潜像は、感光体ドラムの回転に伴って対応する現像ローラの方向に移動する。なお、この光走査装置2010の詳細については後述する。
【0050】
各現像ローラは、回転に伴って、対応するトナーカートリッジからのトナーが、その表面に薄く均一に塗布される。そして、各現像ローラの表面のトナーは、対応する感光体ドラムの表面に接すると、該表面における光が照射された部分にだけ移行し、そこに付着する。すなわち、各現像ローラは、対応する感光体ドラムの表面に形成された潜像にトナーを付着させて顕像化させる。ここでトナーが付着した像(トナー画像)は、感光体ドラムの回転に伴って中間転写ベルト2040の方向に移動する。
【0051】
イエロー、マゼンタ、シアン、ブラックの各トナー画像は、所定のタイミングで中間転写ベルト2040上に順次転写され、重ね合わされて多色のカラー画像が形成される。ところで、中間転写ベルト2040上で、トナー画像の移動する方向は「副方向」と呼ばれ、該副方向に直交する方向(ここでは、Y軸方向)は「主方向」と呼ばれている。
【0052】
給紙トレイ2060には記録紙が格納されている。この給紙トレイ2060の近傍には給紙コロ2054が配置されており、該給紙コロ2054は、記録紙を給紙トレイ2060から1枚ずつ取り出し、レジストローラ対2056に搬送する。該レジストローラ対2056は、所定のタイミングで記録紙を中間転写ベルト2040と転写ローラ2042との間隙に向けて送り出す。そして、転写ローラ2042により、中間転写ベルト2040上のカラー画像が記録紙に転写される。ここで転写された記録紙は、定着装置2050に送られる。
【0053】
定着装置2050では、熱と圧力とが記録紙に加えられ、これによってトナーが記録紙上に定着される。ここで定着された記録紙は、排紙ローラ2058を介して排紙トレイ2070に送られ、排紙トレイ2070上に順次積み重ねられる。
【0054】
各クリーニングユニットは、対応する感光体ドラムの表面に残ったトナー(残留トナー)を除去する。残留トナーが除去された感光体ドラムの表面は、再度対応する帯電装置に対向する位置に戻る。
【0055】
トナーパターン検出器2245は、中間転写ベルト2040の−X側に配置されている。このトナーパターン検出器2245については後述する。
【0056】
次に、前記光走査装置2010の詳細について説明する。
【0057】
光走査装置2010は、一例として図3〜図6に示されるように、4つの光源(2200a、2200b、2200c、2200d)、4つのカップリングレンズ(2201a、2201b、2201c、2201d)、4つの開口板(2202a、2202b、2202c、2202d)、4つのシリンドリカルレンズ(2204a、2204b、2204c、2204d)、ポリゴンミラー2104、4つの偏向器側走査レンズ(2105a、2105b、2105c、2105d)、8枚の折り返しミラー(2106a、2106b、2106c、2106d、2108a、2108b、2108c、2108d)、4つの像面側走査レンズ(2107a、2107b、2107c、2107d)、及び不図示の走査制御装置などを備えている。
【0058】
なお、以下では、便宜上、主走査方向に対応する方向を「主走査対応方向」と略述し、副走査方向に対応する方向を「副走査対応方向」と略述する。
【0059】
光源2200a、カップリングレンズ2201a、開口板2202a、シリンドリカルレンズ2204a、偏向器側走査レンズ2105a、像面側走査レンズ2107a、2枚の折り返しミラー(2106a、2108a)は、感光体ドラム2030aに潜像を形成するための光学部材である。
【0060】
光源2200b、カップリングレンズ2201b、開口板2202b、シリンドリカルレンズ2204b、偏向器側走査レンズ2105b、像面側走査レンズ2107b、2枚の折り返しミラー(2106b、2108b)は、感光体ドラム2030bに潜像を形成するための光学部材である。
【0061】
光源2200c、カップリングレンズ2201c、開口板2202c、シリンドリカルレンズ2204c、偏向器側走査レンズ2105c、像面側走査レンズ2107c、2枚の折り返しミラー(2106c、2108c)は、感光体ドラム2030cに潜像を形成するための光学部材である。
【0062】
光源2200d、カップリングレンズ2201d、開口板2202d、シリンドリカルレンズ2204d、偏向器側走査レンズ2105d、像面側走査レンズ2107d、2枚の折り返しミラー(2106d、2108d)は、感光体ドラム2030dに潜像を形成するための光学部材である。
【0063】
各光源は、走査制御装置によって点灯及び消灯される。
【0064】
各カップリングレンズは、対応する光源から射出された光束の光路上に配置され、該光束を略平行光束とする。各開口板は、開口部を有し、対応するカップリングレンズを介した光束を整形する。各シリンドリカルレンズは、対応する開口板の開口部を通過した光束を、ポリゴンミラー2104の偏向反射面近傍にZ軸方向に関して結像する。
【0065】
ポリゴンミラー2104は、2段構造の4面鏡を有し、各鏡がそれぞれ偏向反射面となる。そして、1段目(下段)の4面鏡ではシリンドリカルレンズ2204aからの光束及びシリンドリカルレンズ2204dからの光束がそれぞれ偏向され、2段目(上段)の4面鏡ではシリンドリカルレンズ2204bからの光束及びシリンドリカルレンズ2204cからの光束がそれぞれ偏向されるように配置されている。
【0066】
ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204aからの光束は、偏向器側走査レンズ2105a、折り返しミラー2106a、像面側走査レンズ2107a、及び折り返しミラー2108aを介して、感光体ドラム2030aに照射され、光スポットが形成される。
【0067】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204bからの光束は、偏向器側走査レンズ2105b、折り返しミラー2106b、像面側走査レンズ2107b、及び折り返しミラー2108bを介して、感光体ドラム2030bに照射され、光スポットが形成される。
【0068】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204cからの光束は、偏向器側走査レンズ2105c、折り返しミラー2106c、像面側走査レンズ2107c、及び折り返しミラー2108cを介して、感光体ドラム2030cに照射され、光スポットが形成される。
【0069】
また、ポリゴンミラー2104で偏向されたシリンドリカルレンズ2204dからの光束は、偏向器側走査レンズ2105d、折り返しミラー2106d、像面側走査レンズ2107d、及び折り返しミラー2108dを介して、感光体ドラム2030dに照射され、光スポットが形成される。
【0070】
各感光体ドラム上の光スポットは、ポリゴンミラー2104の回転に伴って感光体ドラムの長手方向に移動する。このときの光スポットの移動方向が「主走査方向」であり、感光体ドラムの回転方向が「副走査方向」である。また、各感光体ドラムにおける画像情報が書き込まれる主走査方向の走査領域は「有効走査領域」、「画像形成領域」、あるいは「有効画像領域」などと呼ばれている。
【0071】
次に、前記トナーパターン検出器2245について説明する。
【0072】
このトナーパターン検出器2245は、一例として図7に示されるように、3つの反射型光学センサ(2245a、2245b、2245c)を有している。
【0073】
そして、一例として図8に示されるように、中間転写ベルト2040における有効画像領域内で、反射型光学センサ2245aは−Y側の端部近傍に配置され、反射型光学センサ2245cは+Y側の端部近傍に配置されている。反射型光学センサ2245bは、主方向に関して、反射型光学センサ2245aと反射型光学センサ2245cの略中間位置に配置されている。
【0074】
ここでは、主方向に関して、反射型光学センサ2245aの中心位置をY1、反射型光学センサ2245bの中心位置をY2、反射型光学センサ2245cの中心位置をY3とする。
【0075】
3つの反射型光学センサ(2245a、2245b、2245c)は、一例として図9に示されるように、センサ支持部材に支持されている。なお、センサ支持部材は、各反射型光学センサを個別に支持するものであっても良い。
【0076】
そして、反射型光学センサ2245aは、本体部Opta及びγ回転駆動部Rmaを有している。また、反射型光学センサ2245bは、本体部Optb及びγ回転駆動部Rmbを有している。さらに、反射型光学センサ2245cは、本体部Optc及びγ回転駆動部Rmcを有している。
【0077】
3つの本体部(Opta、Optb、Optc)は、いずれも同じ構成、同じ構造を有している。そこで、以下では、本体部Optaを代表として、本体部の構成及び構造について説明する。
【0078】
本体部Optaは、一例として図10〜図13に示されるように、11個の発光部(E1〜E11)を含む照射系、11個の照明用マイクロレンズ(LE1〜LE11)を含む照明光学系、11個の受光用マイクロレンズ(LD1〜LD11)を含む受光光学系、11個の受光部(D1〜D11)を含む受光系、及びそれらが保持されているセンサハウジング(図示省略)などを備えている。
【0079】
11個の発光部(E1〜E11)は、主方向に沿って等しい間隔Leで配置されている。各発光部には、LED(Light Emitting Diode)を用いることができる。ここでは、一例として、Le=0.4mmとしている。この場合は、主方向に関して、E1とE11との間の距離は4mm(Le×10)である。また、各発光部の主方向の大きさは約0.04mmである。さらに、各発光部から射出される光束の波長は850nmである。
【0080】
11個の発光部(E1〜E11)は、プリンタ制御装置2090によって点灯及び消灯される。なお、以下では、便宜上、点灯された発光部を「点灯発光部」と略述する。
【0081】
11個の照明用マイクロレンズ(LE1〜LE11)は、それぞれ11個の発光部(E1〜E11)に個別に対応している。
【0082】
各照明用マイクロレンズは、対応する発光部から射出された光束を中間転写ベルト2040の表面に向けて集光的に導く。各照明用マイクロレンズでは、レンズ径、レンズの曲率半径、及びレンズ厚は同一である。また、各照明用マイクロレンズの光軸は、対応する発光部の発光面に直交する方向に平行である。
【0083】
ここでは、説明をわかりやすくするため、各発光部から射出され対応する照明用マイクロレンズを通過した光束のみが、検出用光(S1〜S11)として中間転写ベルト2040を照明するものとする(図14参照)。そして、各検出用光によって中間転写ベルト2040の表面に形成される光スポット(以下では、便宜上「検出用光スポット」と略述する)の中心は、副方向に関して、対応する発光部と受光部の中間付近にある。
【0084】
各検出用光スポットの大きさ(直径)は、一例として、0.4mmである。この値は、上記発光部の間隔Leと等しい。なお、従来の検出用光スポットの大きさ(直径)は、通常、2〜3mm程度であった。
【0085】
また、ここでは、中間転写ベルト2040の表面は滑らかであり、中間転写ベルト2040の表面に照射された検出用光のほとんどは正反射される。
【0086】
11個の受光部(D1〜D11)は、それぞれ発光部(E1〜E11)に個別に対応している。
【0087】
各受光部は、対応する発光部から射出され、中間転写ベルト2040の表面で正反射された光束の光路上に配置されている。そして、11個の受光部の間隔(配列ピッチ)は、11個の発光部の間隔Leと等しい。各受光部の主方向の大きさは約0.35mmである。また、各受光部における受光感度のピーク波長は850nm付近にある。
【0088】
各受光部には、PD(フォトダイオード)を用いることができる。そして、各受光部は、受光量に応じた信号を出力する。
【0089】
11個の受光用マイクロレンズ(LD1〜LD11)は、それぞれ11個の受光部(D1〜D11)に個別し、中間転写ベルト2040あるいはトナーパターンで反射された検出用光を集光する。この場合には、各受光部の受光量を増加させることが可能となる。すなわち、検出感度を向上させることができる。各受光用マイクロレンズでは、レンズ径、レンズの曲率半径、及びレンズ厚は同一である。
【0090】
各マイクロレンズには、主方向及び副方向に関して集光機能を有する球面レンズや、副方向に関して正のパワーを持つシリンドリカルレンズ、主方向に関するパワーと副方向に関するパワーとが互いに異なるアナモフィックレンズなどを用いることができる。
【0091】
ここでは、一例として、各マイクロレンズは球面レンズである。そして、各照明用マイクロレンズでは、入射側の光学面は集光パワーを有し、射出側の光学面は集光パワーを有していない。また、各受光用マイクロレンズでは、射出側の光学面は集光パワーを有し、入射側の光学面は集光パワーを有していない。
【0092】
具体的には、各照明用マイクロレンズでは、レンズ径は0.613mm、レンズの曲率半径は0.430mm、レンズ厚は0.129mmである。
【0093】
各受光用マイクロレンズでは、レンズ径は0.750mm、レンズの曲率半径は0.380mm、レンズ厚は0.319mmである。
【0094】
ここでは、各受光用マイクロレンズのレンズ径を各照明用マイクロレンズより大きくすることで、反射光をより多く受光できるようにした。また、各受光用マイクロレンズの曲率半径を各照明用マイクロレンズに比べて小さくすることで、レンズ内部における全反射が増えるため、正反射光の受光量が減らせることが可能であると考えた。また、各受光用マイクロレンズの曲率半径を小さくすることで、点灯させる発光部に対応する受光部に隣接する受光部の前面に配置した受光用マイクロレンズ通過後の光線を大きく屈折させることが可能となり、テストパターンからの拡散反射光が受光部に到達でき、拡散反射光の受光量も増加することが期待できる。
【0095】
本実施形態では、11個の照明用マイクロレンズ(LE1〜LE11)と11個の受光用マイクロレンズ(LD1〜LD11)は、一体化され、マイクロレンズアレイとなっている。これにより、各マイクロレンズを所定位置に組み付ける際の作業性を向上させることができる。また、複数のマイクロレンズにおけるレンズ面間の位置精度を高めることができる。各レンズ面は、フォトリソグラフィやモールド成形などの加工法を用いてガラス基板や樹脂基板上に形成することができる。
【0096】
なお、以下では、発光部を特定する必要がない場合には、発光部Eiと表記する。そして、発光部Eiに対応する照明用マイクロレンズを照明用マイクロレンズLEiと表記する。また、発光部Eiから射出され照明用マイクロレンズLEiを通過した光束を、検出用光Siと表記する。また、発光部Eiに対応する受光部を受光部Diと表記する。さらに、受光部Diに対応する受光用マイクロレンズを受光用マイクロレンズLDiと表記する。また、検出用Siによる検出用光スポットを、「検出用光スポットSi」と表記する。
【0097】
また、一例として図15に示されるように、各照明用マイクロレンズの光軸は、対応する各発光部の中心を通り該発光部に垂直な軸に対して受光系側にΔd(ここでは、0.035mm)ずれている。また、各受光用マイクロレンズの光軸は、対応する各受光部の中心を通り該受光部に垂直な軸に対して照射系側にΔd’(ここでは、0.020mm)ずれている。これにより、より多くの反射光を対応する受光部に導くことができる。
【0098】
そして、副方向に関して、照明用マイクロレンズLEiと受光用マイクロレンズLDiのレンズ間距離は0.445mm、発光部Eiと受光部Diの間隔は、0.500mmである。さらに、副方向に関して、発光部Eiから照明用マイクロレンズLEiまでの距離は、0.800mmであり、各マイクロレンズの−Z側の面から中間転写ベルト2040表面までの距離は、5mmである。
【0099】
γ回転駆動部Rmaは、本体部Optaをその中心を通り、Z軸に平行な軸まわりに回動させる。γ回転駆動部Rmbは、本体部Optbをその中心を通り、Z軸に平行な軸まわりに回動させる。γ回転駆動部Rmcは、本体部Optcをその中心を通り、Z軸に平行な軸まわりに回動させる。
【0100】
3つのγ回転駆動部(Rma、Rmb、Rmc)は、いずれも同じ構成、同じ構造を有している。そこで、以下では、γ回転駆動部Rmaを代表として、γ回転駆動部の構成及び構造について説明する。
【0101】
γ回転駆動部Rmaは、一例として図16(A)及び図16(B)に示されるように、回転テーブル、ギア、ステッピングモータなどを有している。
【0102】
回転テーブルは、円板状の部材であり、センサ支持部材の−Z側の面に、その中心を通り、Z軸に平行な軸まわりに回動可能に取り付けられている。この回転テーブルの側面には、ギアに係合されるねじ溝が形成されている。そして、回転テーブルの−Z側の面に本体部Optaが固定されている。このとき、回転テーブルの回転軸上に本体部Optaの中心が位置するように設定されている。そこで、回転テーブルが回転すると、本体部Optaは、その中心を通りZ軸に平行な軸まわりに回転することとなる。
【0103】
ギアは、回転テーブルの−Y側で、回転テーブルのねじ溝に係合する位置に配置されている。このギアは、シャフトを介してステッピングモータに接続されている。そこで、ステッピングモータが回転すると、ギアが回転し、回転テーブルが回転する。このステッピングモータは、プリンタ制御装置2090によって制御される。
【0104】
次に、画像形成プロセス制御で用いられるテストパターンとしてのトナーパターンについて説明する。
【0105】
ここでは、一例として図17に示されるように、Y1位置にパターンQPとパターンPPが形成され、Y2位置にパターンQPとパターンPPとパターンDP1〜DP4が形成され、Y3位置にパターンQPとパターンPPが形成される。
【0106】
パターンQPはスポット列傾き検出用パターンであり、パターンPPは位置ずれ検出用パターンであり、パターンDP1〜DP4は、いずれも濃度検出用パターンである。
【0107】
スポット列傾き検出用パターンQPは、一例として図18に示されるように、主方向を長手方向とし、主方向に関して、両端の発光部間の距離(ここでは、4mm)よりも長い(例えば、5.0mm)ライン状パターンであり、ブラックトナーで形成される。また、スポット列傾き検出用パターンQPの副方向の長さは0.5mmである。
【0108】
位置ずれ検出用パターンPPは、一例として図19に示されるように、主方向(Y軸方向)に平行な4本のライン状パターン(LPK1、LPM1、LPC1、LPY1)からなる第1のパターン群と、主方向に対して傾斜した4本のライン状パターン(LPK2、LPM2、LPC2、LPY2)からなる第2のパターン群とにより構成されている。
【0109】
ライン状パターンLPK1とLPK2はペアをなし、ブラックトナーで形成され、ライン状パターンLPM1とLPM2はペアをなし、マゼンタトナーで形成される。また、ライン状パターンLPC1とLPC2はペアをなし、シアントナーで形成され、ライン状パターンLPY1とLPY2はペアをなし、イエロートナーで形成される。
【0110】
第1のパターン群では、各ライン状パターンの主方向の長さw1を1.2mm、副方向の長さを0.5mmとし、それらの副方向の間隔を1mmとしている。この場合は、主方向に関して、ライン状パターンの長さを、「検出用光スポットの大きさ」+「発光部間隔Le」×2、と等しくすることができる。
【0111】
また、第2のパターン群では、各ライン状パターンの傾斜角を45°とし、主方向に関する長さw1を1.2mm(=w1)、線幅を0.5mmとしている。
【0112】
濃度検出用パターンDP1はブラックトナーで形成され、濃度検出用パターンDP2はマゼンタトナーで形成される。また、濃度検出用パターンDP3はシアントナーで形成され、濃度検出用パターンDP4はイエロートナーで形成される。
【0113】
なお、以下では、濃度検出用パターンDP1〜DP4を区別する必要がない場合には、総称して「濃度検出用パターンDP」ともいう。
【0114】
濃度検出用パターンDPは、一例として図20に示されるように、5個の四角形状のパターン(p1〜p5、以下では、便宜上「矩形パターン」という)を有している。各矩形パターンは、中間転写ベルト2040の移動方向に沿って並んでおり、それぞれ全体としてみたときにトナー濃度の階調が異なっている。ここでは、トナー濃度の低い矩形パターンから、p1、p2、p3、p4、p5とする。すなわち、矩形パターンp1のトナー濃度が最も低く、矩形パターンp5のトナー濃度が最も高い。
【0115】
ここでは、一例として、各矩形パターンの主方向の長さw2を1mm、副方向の長さw3を2mmとしている。すなわち、各矩形パターンの主方向の長さw2は、発光部の間隔Le(0.4mm)と検出用光スポットの大きさ(0.4mm)の和よりも大きい。この場合は、検出用光スポットは矩形パターンを確実に照明することができ、光の利用効率を高くすることが可能である。また、副方向に関して、隣接する2つの矩形パターンの中心間隔は3mmである。
【0116】
この場合は、トナーパターンを作成するのに必要なトナー量を従来の1/100程度とすることができる。すなわち、不寄与トナーの量を大幅に減少させることができる。その結果、トナーカートリッジの交換時期を延長させることができる。
【0117】
ところで、トナー濃度の階調は、光源から射出される光束のパワーの調整、光源に供給される駆動パルスにおけるデューティの調整、帯電バイアス及び現像バイアスの調整によって変えることができる。また、網点の面積率を変えることによっても、トナー濃度の階調を変化させることができる。
【0118】
なお、検出用光が、中間転写ベルトのみを照明したときの反射光は、ほとんどが中間転写ベルト表面で正反射された反射光(正反射光)である(図21(A)参照)。一方、検出用光が、パターンを照明したときは、該検出用光は、トナーだけでなく下地の中間転写ベルト表面にも到達する(図21(B)参照)。そこで、パターンを照明したときの反射光は、中間転写ベルト表面で正反射された光と、少なくとも1回はトナーで反射・屈折されることにより散乱された光とに大別される。なお、後者の散乱光には、中間転写ベルト表面から正反射される方向と同一方向に散乱されるものも含まれるが、その光量は少ないものとし、また、中間転写ベルト表面から正反射される光と区別できないため、無視して考える。すなわち、前者の中間転写ベルトに起因する光を正反射寄与分、後者のトナーに起因する光を拡散反射寄与分とする。このように、パターンを照明した検出用光は、正反射されるとともに拡散反射される。
【0119】
次に、トナーパターン検出器2245を用いて行われる画像形成プロセス制御処理について図22を用いて説明する。図22のフローチャートは、画像形成プロセス制御処理の際に、プリンタ制御装置2090によって実行される一連の処理アルゴリズムに対応している。
【0120】
最初のステップS301では、画像形成プロセス制御の要求があるか否かを判断する。ここでは、画像形成プロセス制御フラグがセットされていれば、ここでの判断は肯定され、画像形成プロセス制御フラグがセットされていなければ、ここでの判断は否定される。
【0121】
画像形成プロセス制御フラグは、電源投入直後では、(1)感光体ドラムの停止時間が6時間以上のとき、(2)装置内の温度が10℃以上変化しているとき、(3)装置内の相対湿度が50%以上変化しているとき、印刷時では、(4)プリント枚数が所定の枚数に達したとき、(5)現像ローラの回転回数が所定の回数に達したとき、(6)中間転写ベルトの走行距離が所定の距離に達したときなどにセットされる。
【0122】
ステップS301での判断が否定されると、画像形成プロセス制御処理は行われない。一方、ステップS301での判断が肯定されると、画像形成プロセス制御フラグをリセットし、ステップS303に移行する。
【0123】
このステップS303では、走査制御装置に対してトナーパターンの作成を指示する。
【0124】
これにより、走査制御装置は、各感光体ドラムにおける所定位置に、トナーパターンが形成されるように各ステーションを制御する。
【0125】
なお、各パターンを形成するために必要なパターンの形成位置情報、濃度情報、濃度検出用パターンの各諧調に対応したバイアス条件、トナー濃度を推定するための反射型光学センサの出力の濃度変換LUT(ルック・アップ・テーブル)は、走査制御装置のメモリに予め格納されている。また、各位置ずれ検出用パターン及び各スポット列傾き検出用パターンQPは、同一の作像条件(露光パワー、帯電バイアス、現像バイアスなど)で形成される。
【0126】
そして、各パターンは、それぞれ所定のタイミングで中間転写ベルト2040に転写される。
【0127】
次のステップS305では、3つの反射型光学センサについて、光スポット列の傾き検出処理を行う。各反射型光学センサにおける光スポット列の傾き検出処理は、同様にして行われるので、以下では、1つの反射型光学センサにおける光スポット列の傾き検出処理を図23のフローチャートを用いて説明する。
【0128】
最初のステップS501では、反射型光学センサにおける発光部E1と発光部E11を点灯させる。
【0129】
次のステップS503では、フラグfを初期化(0リセット)する。
【0130】
次のステップS505では、受光部D1の出力信号及び受光部D11の出力信号を参照し、スポット列傾き検出用パターンQPが検出されたか否かを判断する。スポット列傾き検出用パターンQPが検出されていなければ、ここでの判断は否定され、スポット列傾き検出用パターンQPが検出されるのを待つ。スポット列傾き検出用パターンQPが検出されると、ここでの判断は肯定され、ステップS507に移行する。なお、ここでの検出を「最初の検出」という。
【0131】
このステップS507では、タイマカウンタΔtを初期化(0リセット)する。なお、タイマカウンタΔtの値は、所定の時間(例えば、2m秒)毎に起動されるタイマ割り込み処理内でカウントアップされる。
【0132】
次のステップS509では、受光部D1の出力信号及び受光部D11の出力信号を参照し、スポット列傾き検出用パターンQPを検出したのが検出用光スポットS1であるか否かを判断する。スポット列傾き検出用パターンQPを検出したのが検出用光スポットS1であれば、ここでの判断は肯定され、ステップS511に移行する。
【0133】
このステップS511では、スポット列傾き検出用パターンQPを最初に検出したのが検出用光スポットS1であることを意味する「1」をフラグfにセットする。
【0134】
次のステップS515では、受光部D1及び受光部D11のうち、最初の検出を行った受光部とは別の受光部(ここでは、受光部D11)の出力信号を参照し、他方の検出用光スポット(ここでは、検出用光スポットS11)でスポット列傾き検出用パターンQPが検出されたか否かを判断する。スポット列傾き検出用パターンQPが検出されていなければ、ここでの判断は否定され、スポット列傾き検出用パターンQPが検出されるのを待つ。スポット列傾き検出用パターンQPが検出されると、ここでの判断は肯定され、ステップS517に移行する。
【0135】
このステップS517では、タイマカウンタΔt及びフラグf1の内容を保存する。
【0136】
次のステップS519では、反射型光学センサにおける発光部E1と発光部E11を消灯させる。そして、光スポット列の傾き検出処理を終了し、ステップS307に移行する。
【0137】
なお、上記ステップS509において、スポット列傾き検出用パターンQPを検出したのが検出用光スポットS11であれば、ステップS509での判断は否定され、ステップS513に移行する。
【0138】
このステップS513では、スポット列傾き検出用パターンQPを最初に検出したのが検出用光スポットS11であることを意味する「11」をフラグfにセットする。そして、上記ステップS515に移行する。
【0139】
図22に戻り、ステップS307では、3つの反射型光学センサについて、それぞれの光スポット列の傾き検出処理における検出結果に基づいて、γ調整処理を行う。
【0140】
ここでは、光スポット列の傾き検出処理で得られたタイマカウンタΔtの値、フラグfの値、発光部E1と発光部E11の主方向に関する中心間距離L、及び中間転写ベルト2040の移動速度Vから、次の(1)式を用いて、主方向に対する光スポット列の傾斜角θγ(図24参照)を算出する。
【0141】
Δt=L×tanθγ/V ……(1)
【0142】
なお、発光部E1と発光部E11が周期τで順次点灯/消灯がなされる場合には、周期τに対応する距離だけスポット列傾き検出用パターンQPが移動するため、受光部D1の出力と受光部D11の出力との間の時間差Δt’は、次の(2)式で示される。
【0143】
Δt’=L×tanθγ/V+τ ……(2)
【0144】
そして、光スポット列が主方向に平行となるように、すなわち、光スポット列の傾斜の向きと逆の向きに角度θγだけ反射型光学センサの本体部が回動されるように、γ回転駆動部のステッピングモータを制御する。なお、ステッピングモータの駆動量と本体部が回動される角度との関係は、予め求められプリンタ制御装置2090のROMに格納されている。
【0145】
次のステップ309では、3つの反射型光学センサについて、それぞれ位置ずれ検出処理を行う。ここでは、図25に示されるように、主方向に関して、位置ずれ検出用パターンPPの中心位置が検出用光スポットS5と検出用光スポットS6の中間位置と略一致しているものとする。この場合は、各反射型光学センサにおける発光部E5と発光部E6を時分割で点灯/消灯させる。発光部E5からの検出用光S5及び発光部E6からの検出用光S6は、中間転写ベルト2040が回転するにつれて、すなわち、時間が経過するとともに、ライン状パターンLPK1〜LPY2を順次照明する。
【0146】
一例として図26に、このときの受光部D5及び受光部D6の出力信号の時間変化(出力波形)が示されている。そして、受光部D5の出力波形と受光部D6の出力波形を加算する(図27参照)。
【0147】
そして、ライン状パターンLPK1を検出してからライン状パターンLPM1を検出するまでの時間Tkm1、ライン状パターンLPK1を検出してからライン状パターンLPC1を検出するまでの時間Tkc1、ライン状パターンLPK1を検出してからライン状パターンLPY1を検出するまでの時間Tky1を求める(図28参照)。
【0148】
さらに、ライン状パターンLPK2を検出してからライン状パターンLPM2を検出するまでの時間Tkm2、ライン状パターンLPK2を検出してからライン状パターンLPC2を検出するまでの時間Tkc2、ライン状パターンLPK2を検出してからライン状パターンLPY2を検出するまでの時間Tky2を求める(図28参照)。
【0149】
そして、時間Tkm1、時間Tkc1、及び時間Tky1をそれぞれ予め得られている基準時間と比較し、その時間差ΔT1から、次の(3)式を用いて、ブラックのトナー画像に対する、副方向に関するマゼンタ、シアン、及びイエローの各トナー画像の位置ずれ量ΔS1を求める(図29(A)参照)。ここで、Vは中間転写ベルト2040の副方向への移動速度である。
【0150】
ΔS1=V・ΔT1 ……(3)
【0151】
また、時間Tkm2、時間Tkc2、及び時間Tky2をそれぞれ予め得られている基準時間と比較し、その時間差ΔT2から、次の(4)式を用いて、ブラックのトナー画像に対する、主方向に関するマゼンタ、シアン、及びイエローの各トナー画像の位置ずれ量ΔS2を求める(図29(B)参照)。ここで、θはライン状パターンの主方向に対する傾斜角(ここでは、45°)である。
【0152】
ΔS2=V・ΔT2・cotθ ……(4)
【0153】
次のステップS311では、トナー濃度の検出処理を行う。ここでは、反射型光学センサ2245bのみが使用される。また、図30に示されるように、主方向に関して、矩形パターンの中心と検出用光スポットS6の中心とが略一致しているものとする。そこで、ここでは、発光部E6のみが点灯される。
【0154】
発光部E6のみが点灯され、検出用光S6が中間転写ベルト2040を照明したときの、受光部D4〜D8の受光量が図31に示されている。なお、ここでの受光部D6の受光量を「1」とする。また、D_ALLは、5個の受光部D4〜D8の受光量の和である。
【0155】
発光部E6のみが点灯され、検出用光S6が濃度検出用パターンDP2の矩形パターンp1〜p5を照明したときの受光部D4〜D8の受光量が図32〜図36に示されている。
【0156】
なお、以下では、照明対象物が中間転写ベルト2040のときの各受光部の受光量をそれぞれ「基準受光量」ともいい、照明対象物が矩形パターンのときの各受光部の受光量をそれぞれ「検出受光量」ともいう。
【0157】
ここでは、矩形パターン毎に、サンプリング毎に、各受光部の検出受光量を拡散反射光による受光量と正反射光による受光量とに分離する。以下では、照明対象物が濃度検出用パターンDP2の矩形パターンp1のときを例として説明する。
【0158】
(1)受光部D6の受光量について
受光部D6は点灯発光部E6に対応する受光部であるため、この受光部D6の検出受光量は全て正反射光による受光量であると仮定する。一般的に、トナーパターンの反射率は、中間転写ベルト2040の反射率よりも低いため、受光部D6の検出受光量は1(基準受光量)よりも小さくなっている。
【0159】
(2)受光部D4及び受光部D8の受光量について
受光部D4及び受光部D8では、基準受光量はいずれも0であった。そこで、受光部D4及び受光部D8の検出受光量は、いずれも、その全てが拡散反射光による受光量である。
【0160】
(3)受光部D5の受光量について
受光部D5では、基準受光量は0ではなかった。そこで、受光部D5の検出受光量は、正反射光と拡散反射光とが混在した光による受光量である。
【0161】
正反射光について考えてみると、受光部D5の検出受光量と受光部D6の検出受光量の比率は、受光部D5の基準受光量と受光部D6の基準受光量の比率と一致するはずである。
【0162】
そこで、受光部D5の基準受光量を受光部D6の基準受光量で除した値(比率Aとする)を求める。
【0163】
そして、受光部D6の検出受光量に比率Aを乗じる。ここで得られた値が、受光部D5の検出受光量に含まれる正反射光による受光量(受光量aとする)である。
【0164】
次に、受光部D5の検出受光量から上記受光量aを差し引く。ここで得られた値が、受光部D5の検出受光量に含まれる拡散反射光による受光量である。
【0165】
(4)受光部D7の受光量について
この受光部では、基準受光量は0ではなかった。そこで、受光部D7の検出受光量は、正反射光と拡散反射光とが混在した光による受光量である。
【0166】
正反射光について考えてみると、受光部D7の検出受光量と受光部D6の検出受光量の比率は、受光部D7の基準受光量と受光部D6の基準受光量の比率と一致するはずである。
【0167】
そこで、受光部D7の基準受光量を受光部D6の基準受光量で除した値(比率Bとする)を求める。
【0168】
そして、受光部D6の検出受光量に比率Bを乗じる。ここで得られた値が、受光部D7の検出受光量に含まれる正反射光による受光量(受光量bとする)である。
【0169】
次に、受光部D7の検出受光量から上記受光量bを差し引く。ここで得られた値が、受光部D7の検出受光量に含まれる拡散反射光による受光量である。
【0170】
このようにして、各受光部の検出受光量を、正反射光による受光量と拡散反射光による受光量とに分離することができる。
【0171】
濃度検出用パターンDP2の矩形パターンp1〜p5における、正反射光による受光量及び拡散反射光による受光量が、図37〜図46に示されている。
【0172】
次に、矩形パターン毎に、点灯発光部毎に、サンプリング毎に、正反射光による受光量の合計値(M1とする)、及び拡散反射光による受光量の合計値(M2とする)を求める。
【0173】
各照明対象物の正反射光による受光量の合計値M1が図47に示されている。また、照明対象物が中間転写ベルト2040のときの合計値M1を1としたときの、各矩形パターンの正反射光による受光量の合計値M1が図48に示されている。これらによると、合計値M1はトナー濃度が高くなるにつれて単調に減少している。これは、トナー濃度が高いほど多くのトナーが付着しているため、正反射する光が減少するためであり、トナー濃度と合計値M1は1対1で対応している。そこで、合計値M1の計測値から、その照明対象物のトナー濃度を知ることができる。
【0174】
各照明対象物の拡散反射光による受光量の合計値M2が図49に示されている。これによると、合計値M2は、トナー濃度に対して単調な関数になっていない。なお、直感的には、トナー濃度が高いほど多くのトナーが付着しているため、拡散反射する光が増加し、合計値M2はトナー濃度が高くなるにつれて単調に増加すると思われがちであるが、拡散反射光による受光量は、検出受光量から正反射光による受光量を減算して求めているため、単調に増加していないものと考えられる。そこで、合計値M2の計測値から、その照明対象物のトナー濃度を知ることは、不可能ではないが必ずしも容易ではない。
【0175】
点灯発光部がE6のときの各照明対象物の合計値M2/合計値M1が図50に示されている。また、合計値M2/合計値M1の最大値を1としたときの、各照明対象物の合計値M2/合計値M1が図51に示されている。これらによると、合計値M2/合計値M1はトナー濃度が高くなるにつれて単調に増加している。そこで、合計値M2/合計値M1からでも、その照明対象物のトナー濃度を知ることができる。
【0176】
なお、合計値M1とトナー濃度との関係、あるいは(合計値M2/合計値M1)とトナー濃度との関係があらかじめ求められ、濃度テーブルとしてプリンタ制御装置2090のROMに格納されている。
【0177】
そこで、プリンタ制御装置2090は、上記濃度テーブルを参照し、矩形パターン毎に、サンプリング毎に、合計値M1、あるいは(合計値M2/合計値M1)に基づいてトナー濃度を求める。これによって、トナー濃度検出処理を終了し、ステップS313に移行する。
【0178】
このステップS313では、画像形成プロセス条件を調整する。
【0179】
ここでは、先ず、上記位置ずれ検出処理で検出された位置ずれ量に基づいて、ブラックのトナー画像に対する副方向のずれ量が0となるように、例えば、対応する画像形成ステーションにおける画像の書き出しタイミングの変更を走査制御装置に指示する。また、ブラックのトナー画像に対する主方向のずれ量が0となるように、例えば、対応する画像形成ステーションにおける画素クロックの位相調整を走査制御装置に指示する。
【0180】
次に、上記濃度検出処理で得られたトナー濃度に基づいて、トナーの色毎に、トナー濃度のずれ量を求める。そして、トナー濃度のずれ量が0となるように、或いは、トナー濃度のずれ量が許容限内となるようにトナー濃度に関連する各種調整を行う。
【0181】
例えば、トナー濃度のずれ量に応じて、対応する画像形成ステーションにおいて、光源から射出される光束のパワー、光源に供給される駆動パルスにおけるデューティ、帯電バイアス、現像バイアス(例えば、特開2009−216930号公報参照)の少なくともいずれかを調整する。
【0182】
ところで、画像濃度を維持するための画像濃度制御には、現像ポテンシャル制御、及び階調制御がある。
【0183】
現像ポテンシャル制御では、所望の画像濃度(例えばベタ濃度)を確保するために、現像ポテンシャル(現像バイアス−ベタ露光電位)の制御を行う。すなわち、濃度検出用パターンから得られたトナー濃度と現像ポテンシャルとの関係より、現像γ(現像ポテンシャルを横軸、トナー濃度を縦軸としたときの傾き)と現像開始電圧Vk(現像ポテンシャルを横軸(x軸)、トナー濃度を縦軸(y軸)としたときのx切片)を求める。そして、次の(5)式を用いて、所望の画像濃度を確保するために必要な現像ポテンシャルを決定し、これに基づいて、作像条件(露光パワー、帯電バイアス、現像バイアス)を決定している。
【0184】
必要な現像ポテンシャル[−kV]=所望の画像濃度(トナー濃度)[mg/cm2]/現像γ[(mg/cm2)/(−kV)]+現像開始電圧Vk[−kV] ……(5)
【0185】
トナーの帯電量と現像ポテンシャルとが一定であれば、現像γはほぼ維持されるが、温度や湿度の変化がある環境ではトナーの帯電量の変化が避けられず、中間調領域の階調性が変化してしまう。それを補正するために階調制御が行われる。階調制御も現像ポテンシャル制御と同等の濃度検出用パターンを用いることができる。
【0186】
階調制御では、得られた階調性と目標とする階調性との偏差がなくなるように階調補正用LUT(ルック・アップ・テーブル)が適宜変更される。具体的には、その都度、新しい階調補正用LUTに書き換える方法や、予め用意した複数の階調補正用LUTから最適なものを選択する方法などがある。
【0187】
以上説明したように、本実施形態に係る反射型光学センサによると、本体部及びγ回転駆動部を有している。本体部は、主方向に沿って等間隔Leで配置された11個の発光部(E1〜E11)を含む照射系、11個の照明用マイクロレンズ(LE1〜LE11)を含む照明光学系、11個の受光用マイクロレンズ(LD1〜LD11)を含む受光光学系、及び11個の受光部(D1〜D11)を含む受光系などを備えている。
【0188】
γ回転駆動部は、回転テーブル、ギア、ステッピングモータなどを有し、本体部をその中心を通り、Z軸に平行な軸まわりに回動させる。
【0189】
これにより、対向する中間転写ベルト2040の表面に平行な面内で本体部を回動させることが可能となり、中間転写ベルト2040上でのスポット列方向を、容易に精度良く、主方向に対して平行とすることができる。
【0190】
そこで、トナーパターンの大きさを小さくして不寄与トナーの消費量を抑制しつつ、トナーパターンの位置検出精度を向上させることができる。
【0191】
また、本実施形態に係るカラープリンタ2000によると、4つの感光体ドラム(2030a、2030b、2030c、2030d)と、各感光体ドラムに対して画像情報に応じて変調された光束を主走査方向に走査し、潜像を形成する光走査装置2010と、潜像にトナーを付着させトナー画像を生成する4つの現像ローラ(2033a、2033b、2033c、2033d)と、各感光体ドラムからトナー画像が転写される中間転写ベルト2040と、中間転写ベルト2040に転写されたトナーパターンを検出するためのトナーパターン検出器2245と、全体を統括的に制御するプリンタ制御装置2090などを備えている。
【0192】
トナーパターン検出器2245は、3つの反射型光学センサ(2245a、2245b、2245c)を有している。
【0193】
プリンタ制御装置2090は、位置ずれ検出用パターンPPを検出するのに先立ってスポット列傾き検出用パターンQPを検出し、主方向に対する光スポット列の傾き情報を取得する。そして、プリンタ制御装置2090は、光スポット列が主方向に平行となるようにγ回転駆動部のステッピングモータを制御する。
【0194】
これにより、トナーパターンが小さくても位置ずれの検出精度を向上させることができる。その結果、カラープリンタ2000は、高い画像品質を維持しつつ、ランニングコストを低減することができる。
【0195】
また、この場合は、γ回転駆動部の回転テーブルを手動で回動調整することができない狭いスペースにも反射型光学センサを配置することが可能であり、画像形成装置のレイアウト自由度を増すことができる。
【0196】
また、この場合は、人為的な調整ミスの防止、調整時間の削減等の効果が期待できる。また、出荷前のみならず、出荷後にも調整が可能となる。
【0197】
そして、出荷直後に行うことで、輸送中や設置に伴う衝撃による反射型光学センサの取り付け位置の変化を調整しなおすことができる。
【0198】
また、定期的に光スポット列の傾き検出処理及びγ調整処理を実行することで、反射型光学センサの取り付け位置の経時変化や、温度変化に代表される環境変化による取り付け位置の変化を調整することができる。これにより、長期的に高い位置検出精度を維持するこができる。
【0199】
また、スポット列傾き検出用パターンQPがブラックトナーで形成されているため、反射率の低下量が大きくなり、検出精度を高くすることができる。
【0200】
また、光スポット列の傾き検出処理において、2つの発光部を同時に点灯させているため、順次点灯/消灯させる場合に比べて、処理時間を短縮することができる。そして、γ調整処理での演算を単純化することができる。
【0201】
また、位置ずれ検出用パターン及び濃度検出用パターンの主方向の寸法を小さくすることができるため、「不寄与トナー」の量を低減させることができる。
【0202】
なお、受光部の検出受光量を拡散反射光による受光量と正反射光による受光量とに分離する方法については、上記実施形態での方法に限定されるものではない。
【0203】
また、上記実施形態における光スポット列の傾き検出処理及びγ調整処理は、操作者からの指示によって任意のタイミングで行われても良い。このとき、該指示は、上位装置からなされても良いし、カラープリンタ2000の操作パネルを介してなされても良い。
【0204】
また、上記実施形態では、位置ずれ検出処理において2つの発光部を点灯発光部とする場合について説明したが、これに限定されるものではなく、図52に示されるように、3つの発光部を点灯発光部としても良い。この場合は、検出精度をさらに高くすることができる。
【0205】
また、上記実施形態において、前記位置ずれ検出用パターンPPに代えて、一例として図53に示される位置ずれ検出用パターンPP’を用いても良い。この位置ずれ検出用パターンPP’では、複数のラインパターンが2次元配列されている。ラインパターンLPK1は、主方向の長さが3.2mm、副方向の長さが0.5mmである。また、ラインパターンLPM1、ラインパターンLPC1、ラインパターンLPY1は、主方向の長さが1.0mm、副方向の長さが0.5mmである。この主方向の長さは、発光部間隔Leと検出用光スポットの大きさの和(=0.8mm)よりも大きい。
【0206】
そして、副方向に関する全体の長さが、位置ずれ検出用パターンPP’は、位置ずれ検出用パターンPPの1/2倍となるため、位置ずれ検出用パターンPP’を用いることにより、位置ずれ検出処理に要する時間を上記実施形態の約1/2倍とすることができる。
【0207】
この場合は、一例として図54に示されるように、位置ずれ検出処理では、3つの発光部(E3、E6、E9)が点灯発光部となる。3つの発光部は、一例として図55に示されるように、時分割で点灯/消灯が繰り返される。そして、受光部D1〜D11は、発光部の点灯タイミングに合わせてサンプリングされる。
【0208】
また、反射型光学センサにおけるγ回転駆動部の回動機構は、上記実施形態に限定されるものではない。要するに、本体部を、対向する中間転写ベルト2040の表面に平行な面内で回動させることができれば良い。
【0209】
また、上記実施形態では、各濃度検出用パターンDPが5個の矩形パターンを有する場合について説明したが、これに限定されるものではない。
【0210】
また、上記実施形態では、11個の照明用マイクロレンズ(LE1〜LE11)と11個の受光用マイクロレンズ(LD1〜LD11)が一体化されている場合について説明したが、これに限定されるものではない。
【0211】
また、上記実施形態では、1つの反射型光学センサが11個の発光部及び受光部を有する場合について説明したが、これに限定されるものではない。発光部及び受光部の数は、3つ以上であることが必須であるが、上限は、反射型光学センサによる主方向の検出範囲に応じて適宜定めることができる。
【0212】
また、上記実施形態では、全ての反射型光学センサが同一個数の発光部を有する場合について説明したが、これに限定されるものではない。
【0213】
また、上記実施形態において、組み立て工程や出荷時検査工程等において、検査員が手動でγ回転駆動部の回転テーブルを回動調整することができる。このとき、該検査員は、位置検出用のテストパターンを基準とした基準治具を用いて、反射型光学センサの取り付け状態を測定し、主方向を長手方向とするライン状パターンに対して光スポット列が平行となるように回転テーブルを回動調整する。
【0214】
あるいは、組み立て工程や出荷時検査工程等において、反射型光学センサが取り付けられている画像形成装置が動作できる状態であれば、反射型光学センサを用いて、上記と同様な位置ずれ検出処理を行う。このとき、検査員は、反射型光学センサの出力信号を、外部モニタ等で確認しながら、主方向を長手方向とするライン状パターンに対して光スポット列が平行となるように回転テーブルを回動調整する。
【0215】
また、上記実施形態では、γ調整処理において、光スポット列が主方向に平行となるようにする場合について説明したが、位置ずれ検出用パターンの第1のパターン群を構成するライン状パターンが主方向に対して傾斜しているときには、光スポット列が該ライン状パターンに平行となるようにγ調整処理を行っても良い。
【0216】
また、上記実施形態では、中間転写ベルトの表面が滑らかな場合について説明したが、これに限らず、中間転写ベルトの表面が滑らかでなくても良い。この場合であっても、上記実施形態と同様にして位置ずれを検出することができる。また、中間転写ベルトの表面の一部が滑らかであっても良い。
【0217】
また、上記実施形態において、反射型光学センサに処理装置を設け、プリンタ制御装置2090での処理の少なくとも一部を、該処理装置が行っても良い。
【0218】
また、上記実施形態において、プリンタ制御装置2090での処理の少なくとも一部を、走査制御装置が行っても良い。
【0219】
また、上記実施形態では、濃度検出用パターンが位置Y2に形成される場合について説明したが、これに限定されるものではない。例えば、濃度検出用パターンが位置Y1あるいは位置Y3に形成されても良い。
【0220】
また、上記実施形態では、濃度検出用パターンが位置Y2のみに形成される場合について説明したが、これに限定されるものではない。例えば、濃度検出用パターンが、さらに位置Y1あるいは位置Y3にも形成されても良い。
【0221】
また、上記実施形態では、4色のトナーが用いられる場合について説明したが、これに限定されるものではない。例えば、5色あるいは6色のトナーが用いられる場合であっても良い。
【0222】
また、上記実施形態では、トナーパターン検出器2245が、中間転写ベルト2040上のトナーパターンを検出する場合について説明したが、これに限定されるものではなく、感光体ドラム表面のトナーパターンを検出しても良い。なお、感光体ドラムの表面は、中間転写ベルト2040と同様に正反射体に近い。
【0223】
また、上記実施形態において、トナーパターンを記録紙に転写し、該記録紙上のトナーパターンを、トナーパターン検出器2245で検出しても良い。
【0224】
また、上記実施形態では、画像形成装置が、感光体ドラム上のトナー画像を一旦中間転写ベルト上に転写し、この中間転写ベルト上からシート状の記録媒体へ転写する中間転写方式の画像形成装置である場合について説明したが、これに限定されるものではない。例えば、感光体ドラム上のトナー画像を直接にシート状の記録媒体上に転写する直接転写方式の画像形成装置であっても良い。この場合は、シート状の記録媒体を搬送する無端ベルトである直接転写ベルトが移動体となる。
【0225】
また、上記実施形態では、画像形成装置として、カラープリンタ2000の場合について説明したが、これに限らず、プリンタ以外の画像形成装置、例えば、複写機、ファクシミリ、又は、これらが集約された複合機であっても良い。
【0226】
また、上記実施形態では、光スポット列の傾き検出処理において、発光部E1と発光部E11のみを点灯させる場合について説明したがこれに限定されるものではなく、例えば、さらに発光部E6を点灯させても良い。また、全ての発光部を点灯させても良い。この場合は、スポット列の傾斜角をさらに精度良く求めることができる。
【0227】
また、上記実施形態では、光スポット列の傾き検出処理において、両端の2つの発光部を点灯発光部とする場合について説明したが、これに限定されるものではない。但し、両端の2つの発光部を点灯発光部とするのが、検出精度の点から好ましい。
【0228】
また、上記実施形態では、スポット列傾き検出用パターンQPの主方向に関する長さが、両端の発光部間の距離よりも長い場合について説明したが、これに限定されるものではない。但し、スポット列傾き検出用パターンQPの主方向に関する長さを両端の発光部間の距離よりも長くするほうが、検出精度の点から好ましい。
【0229】
また、上記実施形態では、スポット列傾き検出用パターンQPが、ブラックトナーで形成される場合について説明したが、これに限定されるものではない。但し、ブラックトナーはカラートナーに対して吸収が大きいため、受光部出力の低下が大きく、検知感度が高い。また、色ずれは、各色の相対的なずれによって表現されており、基準となる色としてブラックが採用されることが一般的であり、その基準と合わせることが好ましい。
【0230】
また、上記実施形態において、位置ずれ検出処理とトナー濃度の検出処理の順番が逆であっても良い。この場合は、その順番に応じてトナーパターンが形成される。
【0231】
また、上記実施形態において、トナーパターンの主方向に関する位置を推定するためのパターンが形成されても良い。
【0232】
また、上記実施形態において、トナー濃度の検出処理では、1つの矩形パターンについて、受光部出力のサンプリングが1回であっても良いし、複数回であっても良い。複数回のときは、得られた濃度データの全てを平均化しても良いし、最大値及び最小値の少なくとも一方を除いて平均化しても良い。
【産業上の利用可能性】
【0233】
以上説明したように、本発明の反射型光学センサによれば、不寄与トナーの消費量を低減させるとともに、取り付け精度を向上させるのに適している。本発明の画像形成装置によれば、高い画像品質を維持しつつ、ランニングコストを低減するのに適している。
【符号の説明】
【0234】
2000…カラープリンタ(画像形成装置)、2010…光走査装置(テストパターン作成装置)、2030a〜2030d…感光体ドラム、2040…中間転写ベルト(移動体)、2090…プリンタ制御装置(調整装置、制御装置)、2245…トナーパターン検出器、2245a、2245b、2245c…反射型光学センサ、D1〜D11…受光部、E1〜E11…発光部、LD1〜LD11…受光用マイクロレンズ、LE1〜LE11…照明用マイクロレンズ、p1〜p5…矩形パターン、QP…スポット列傾き検出用パターン(調整用パターン)、Rma,Rmb,Rmc…γ回転駆動部(駆動系)。
【先行技術文献】
【特許文献】
【0235】
【特許文献1】特開2007−286176号公報
【特許文献2】特開2002−174936号公報
【特許文献3】特開2010−039460号公報
【特許請求の範囲】
【請求項1】
第1の方向に移動する移動体上のパターンを検出するための反射型光学センサであって、
前記第1の方向に直交する第2の方向に沿って配列された複数の発光部を含む照射系と、
該照射系から射出され前記パターンで反射された光を受光する複数の受光部を含む受光系と、
前記第1の方向及び前記第2の方向のいずれに対しても直交する第3の方向に平行な軸まわりに、前記照射系及び前記受光系を回動させることができる駆動系と、を備える反射型光学センサ。
【請求項2】
前記照射系は、前記第2の方向に沿って配列された少なくとも3つの発光部を含み、前記受光系は、少なくとも3つの受光部を含むことを特徴とする請求項1に記載の反射型光学センサ。
【請求項3】
画像情報に応じた画像形成条件で移動体上に画像を形成する画像形成装置において、
前記移動体上のテストパターンを検出するための請求項1又は2に記載の反射型光学センサと、
前記反射型光学センサの受光系の出力信号に基づいて、前記画像形成条件を調整する調整装置と、を備えることを特徴とする画像形成装置。
【請求項4】
前記テストパターンは、ライン状パターンを含み、
前記反射型光学センサの照射系から射出され前記移動体を照明する複数の光スポットからなる光スポット列が、前記ライン状パターンに平行となるように、前記反射型光学センサの駆動系を制御する制御装置を備えることを特徴とする請求項3に記載の画像形成装置。
【請求項5】
前記移動体上に前記ライン状パターンに平行な調整用パターンが作成され、
前記制御装置は、前記反射型光学センサによる前記調整用パターンの検出結果に基づいて、前記反射型光学センサの駆動系を制御することを特徴とする請求項4に記載の画像形成装置。
【請求項6】
前記第2の方向に関して、前記調整用パターンの長さは、前記照射系における両端の発光部間の距離よりも長いことを特徴とする請求項5に記載の画像形成装置。
【請求項7】
前記制御装置は、前記調整用パターンを前記反射型光学センサで検出する際、前記両端の発光部を同時に点灯させることを特徴とする請求項6に記載の画像形成装置。
【請求項8】
前記調整用パターンは、黒色であることを特徴とする請求項5〜7のいずれか一項に記載の画像形成装置。
【請求項9】
前記制御装置は、予め設定されている所定のタイミングで、前記反射型光学センサの駆動系を制御することを特徴とする請求項4〜8のいずれか一項に記載の画像形成装置。
【請求項10】
前記移動体は、中間転写ベルトであることを特徴とする請求項3〜9のいずれか一項に記載の画像形成装置。
【請求項11】
前記画像情報は、多色の画像情報であることを特徴とする請求項3〜10のいずれか一項に記載の画像形成装置。
【請求項1】
第1の方向に移動する移動体上のパターンを検出するための反射型光学センサであって、
前記第1の方向に直交する第2の方向に沿って配列された複数の発光部を含む照射系と、
該照射系から射出され前記パターンで反射された光を受光する複数の受光部を含む受光系と、
前記第1の方向及び前記第2の方向のいずれに対しても直交する第3の方向に平行な軸まわりに、前記照射系及び前記受光系を回動させることができる駆動系と、を備える反射型光学センサ。
【請求項2】
前記照射系は、前記第2の方向に沿って配列された少なくとも3つの発光部を含み、前記受光系は、少なくとも3つの受光部を含むことを特徴とする請求項1に記載の反射型光学センサ。
【請求項3】
画像情報に応じた画像形成条件で移動体上に画像を形成する画像形成装置において、
前記移動体上のテストパターンを検出するための請求項1又は2に記載の反射型光学センサと、
前記反射型光学センサの受光系の出力信号に基づいて、前記画像形成条件を調整する調整装置と、を備えることを特徴とする画像形成装置。
【請求項4】
前記テストパターンは、ライン状パターンを含み、
前記反射型光学センサの照射系から射出され前記移動体を照明する複数の光スポットからなる光スポット列が、前記ライン状パターンに平行となるように、前記反射型光学センサの駆動系を制御する制御装置を備えることを特徴とする請求項3に記載の画像形成装置。
【請求項5】
前記移動体上に前記ライン状パターンに平行な調整用パターンが作成され、
前記制御装置は、前記反射型光学センサによる前記調整用パターンの検出結果に基づいて、前記反射型光学センサの駆動系を制御することを特徴とする請求項4に記載の画像形成装置。
【請求項6】
前記第2の方向に関して、前記調整用パターンの長さは、前記照射系における両端の発光部間の距離よりも長いことを特徴とする請求項5に記載の画像形成装置。
【請求項7】
前記制御装置は、前記調整用パターンを前記反射型光学センサで検出する際、前記両端の発光部を同時に点灯させることを特徴とする請求項6に記載の画像形成装置。
【請求項8】
前記調整用パターンは、黒色であることを特徴とする請求項5〜7のいずれか一項に記載の画像形成装置。
【請求項9】
前記制御装置は、予め設定されている所定のタイミングで、前記反射型光学センサの駆動系を制御することを特徴とする請求項4〜8のいずれか一項に記載の画像形成装置。
【請求項10】
前記移動体は、中間転写ベルトであることを特徴とする請求項3〜9のいずれか一項に記載の画像形成装置。
【請求項11】
前記画像情報は、多色の画像情報であることを特徴とする請求項3〜10のいずれか一項に記載の画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図18】
【図19】
【図21】
【図22】
【図23】
【図26】
【図27】
【図28】
【図29】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図53】
【図55】
【図56】
【図57】
【図17】
【図20】
【図24】
【図25】
【図30】
【図52】
【図54】
【図58】
【図59】
【図60】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図18】
【図19】
【図21】
【図22】
【図23】
【図26】
【図27】
【図28】
【図29】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図53】
【図55】
【図56】
【図57】
【図17】
【図20】
【図24】
【図25】
【図30】
【図52】
【図54】
【図58】
【図59】
【図60】
【公開番号】特開2012−173663(P2012−173663A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−37847(P2011−37847)
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月24日(2011.2.24)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]