
反復処理
【課題】対象領域を処理して生物学的特徴を発見すること。
【解決手段】領域リデファイナは、クロマトグラフィ/質量分析画像のセット中の境界エリアを再定義する。リデファイナは、対象とする共通の特徴を指す画像中のピークを定義し、位置を同定する。再定義された境界エリアは、対象とする特徴に関連付けられた他のピークの位置を特定する。ピークは、構成画像、または構成画像のセットの組み合わせとして形成された合成画像を使用して反復的に識別および抽出される。
【解決手段】領域リデファイナは、クロマトグラフィ/質量分析画像のセット中の境界エリアを再定義する。リデファイナは、対象とする共通の特徴を指す画像中のピークを定義し、位置を同定する。再定義された境界エリアは、対象とする特徴に関連付けられた他のピークの位置を特定する。ピークは、構成画像、または構成画像のセットの組み合わせとして形成された合成画像を使用して反復的に識別および抽出される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、化学および生物試料の分析に関する。
【背景技術】
【0002】
本出願は、参照により本明細書に組み込まれている、2008年10月23日に出願した米国特許仮出願第61/107,988号明細書の利益を請求するものである。
【0003】
実験においては、液体クロマトグラフィ/質量分析工程から形成された複数の画像に発見されるピークが、医薬品の発見を明らかにする証拠となる。1つの画像について、境界エリアが定義されて、対象とする生物学的手がかりを表すピークの位置を同定することができる。残りの画像については、すべてが、潜在的に異なる、対象の生物学的手がかりを表す多くの他のピークがある可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、残りの画像中で同じピークが識別され、位置が同定されなければならない。さらに、誤った科学的結論を招きかねない、ピーク境界エリアの中に望ましくないアーチファクトを含める危険性を低減するために、すべての画像上で位置が同定された境界エリアは、すべての画像上にわたるピークを包含するために、必要とされる最小限の境界領域でなければならない。
【課題を解決するための手段】
【0005】
この要約は、以下の詳細な説明でさらに説明する概念の一部を簡略化した形態で紹介するために提供される。この要約は、特許請求の範囲に記載される主題の主要な特徴を明らかにするものでも、特許請求の範囲に記載される主題の範囲を特定する助けとして使用されるものでもない。
【0006】
本発明の主題の一態様は、反復領域プロセッサを含み、この反復領域プロセッサは、構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にするように、ハードウェア上で実行されるように構成された領域リデファイナ(redefiner)を備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。本発明で使用される場合、ピークとは、調査対象の試料が原因となる分析信号中の変化である。液体クロマトグラフィ(LC)と質量分析(MS)の併用では、そのようなピークは通例、溶出時間(または時間間隔)および質量対電荷(m/z)比に関連付けられる。ピークの例には、単一のピーク、ピークのまとまり、あるいは他の連続した信号変化が含まれる。
【0007】
本発明の主題の別の態様は、対象領域を処理して生物学的特徴を発見する方法を含み、この方法は、合成画像を使用して対象領域を再定義するか、または合成画像を使用せずに構成画像のセットを使用して対象領域を再定義するかを選択することを備える。この方法はさらに、対象領域を再定義して構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にすることを備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。
【0008】
本発明の主題のさらに別の態様は、対象領域を処理して生物学的特徴を発見する方法を実装するためのコンピュータ実行可能命令が格納されたコンピュータ可読媒体を含み、該方法は、合成画像を使用して対象領域を再定義するか、または合成画像を使用せずに構成画像のセットを使用して対象領域を再定義するかを選択することを備える。該方法はさらに、対象領域を再定義して構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にすることを備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。
【0009】
本発明の上記およびその他の目的、特徴、および効果は、添付図面を参照しながら進める以下の詳細な説明からより明らかになろう。
【0010】
本発明の上記態様およびそれに付随する効果の多くは、以下の詳細な説明を添付図面と併せて読むことにより、よりよく理解されると、より容易に理解することができよう。
【図面の簡単な説明】
【0011】
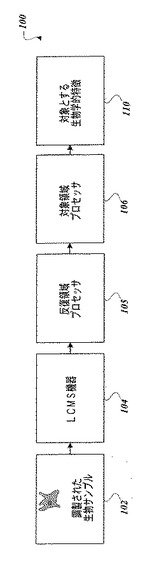
【図1A】調製済みの生物サンプルを処理して生物学的候補のリストを研究者に対して生成する例示的ハードウェア構成要素を示すブロック図である。
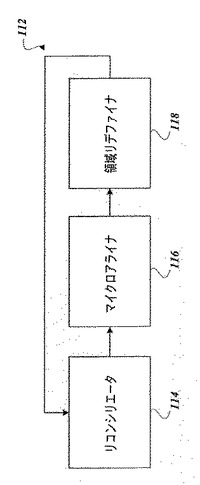
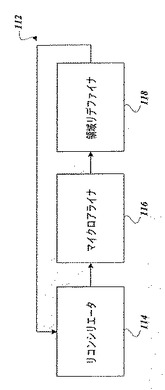
【図1B】反復的な領域再定義工程を実行する例示的ハードウェア構成要素を示すブロック図である。
【図2A】例示的なLC/MS画像(構成画像)を示す図である。
【図2B】例示的なLC/MS画像(構成画像)を示す図である。
【図2C】例示的なLC/MS画像(構成画像)を示す図である。
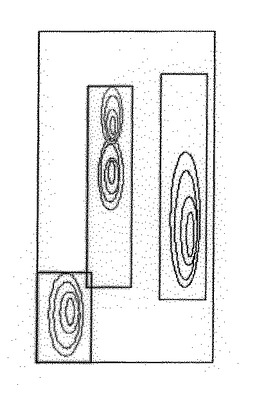
【図2D】例示的な合成画像を示す図である。
【図3A】構成画像のスニペットおよび例示的なマイクロアライン後のスニペットを示す図である。
【図3B】構成画像のスニペットおよび例示的なマイクロアライン後のスニペットを示す図である。
【図3C】例示的な合成スニペットを示す図である。
【図4A】分割後の例示的合成スニペットを示す図である。
【図4B】構成画像の例示的な分割を示す図である。
【図4C】構成画像の例示的な分割を示す図である。
【図4D】構成画像の例示的な分割を示す図である。
【図5A】例示的な構成画像を示す図である。
【図5B】例示的な構成画像を示す図である。
【図5C】例示的な構成画像を示す図である。
【図5D】例示的な構成画像を示す図である。
【図5E】合成画像から導出された例示的なピークマスクを示す図である。
【図5F】事前に形成されたピークマスクを使用した例示的なピークの識別を示す図である。
【図5G】例示的なピークマスクで識別された合成画像の例示的スニペットを示す図である。
【図5H】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5I】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5J】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5K】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【0012】
【図5L】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【図5M】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【図5N】例示的なマイクロアライン後の合成スニペットを示す図である。
【図5O】例示的なマイクロアライン後の合成スニペットを示す図である。
【図5P】例示的なマイクロアライン後の合成スニペットから形成された例示的なピークマスクを示す図である。
【図5Q】例示的なピークマスクを使用して、マイクロアラインされた合成スニペットから切り出されたさらなる例示的スニペットを示す図である。
【図5R】例示的スニペットのさらなる分割を示す図である。
【図5S】例示的なピークマスクを示す図である。
【図5T】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図5U】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図5V】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図6A】例示的な構成画像を示す図である。
【図6B】例示的な構成画像を示す図である。
【図6C】例示的な構成画像を示す図である。
【図6D】例示的なピークマスクを示す図である。
【図6E】例示的なピークマスクを示す図である。
【図6F】例示的なピークマスクを示す図である。
【図6G】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6H】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6I】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6J】ピークマスクの行列を示す図である。
【図6K】本発明の主題の一実施形態に係る共通ピークマスクの選択を示す図である。
【図6L】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6M】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6N】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6O】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図6P】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図6Q】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図7A】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7B】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7C】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7D】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7E】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7F】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7G】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7H】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7I】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7J】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7K】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7L】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7M】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7N】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図8】開示される方法を実装するのに適した代表的なコンピューティング環境を示すブロック図である。
【発明を実施するための形態】
【0013】
本出願および特許請求の範囲で使用される場合、単数形の「a」、「an」および「the」は、当該文脈が明確に指定しない限り複数形を含む。また、用語「〜を含む(includes)」は、「〜を備える(comprises)」を意味する。さらに、用語「結合された(coupled)」は、結合された物の間にある中間要素の存在を排除しない。
【0014】
本明細書に記載されるシステム、装置、および方法は、決して制限的なものと解釈されるべきではない。本開示は、単独での、ならびに相互と各種コンビネーションおよびサブコンビネーションされた、開示される各種実施形態の新規かつ非自明なすべての特徴および態様を対象とする。ここに開示されるシステム、方法、および装置は、それらの特定の態様または特徴または組み合わせに制限されず、また、開示されるシステム、方法、および装置は、1つまたは複数の特定の利益が存在すること、あるいは問題が解決されることを必要とするものでもない。動作理論はいずれも説明を容易にするためであるが、ここに開示されるシステム、方法、および装置は、それらの動作理論に制限されない。
【0015】
開示される方法の一部は、説明上の利便性のために動作を特定の連続した順序で説明するが、以下で述べる特定の文言で特定の順序付けが必要とされない限り、そのような方式の説明は順序の入れ替えを包含することを理解されたい。たとえば、順番に説明される動作は、場合によっては、順序を入れ替える、あるいは同時に行われてよい。さらに、図を簡潔にするために、添付図面は、開示されるシステム、方法、および装置が他のシステム、方法、および装置と併せて使用されることが可能な各種方式を示さない場合がある。また、説明では、開示される方法を説明するために「生成する(produce)」や「提供する(provide)」のような用語を用いる箇所がある。そうした用語は、実際に行われる動作の高水準の抽象化である。それらの用語に対応する実際の動作は特定の実装に応じて異なり、当業者には容易に認識することができる。
【0016】
質量分析は、液体クロマトグラフィ、ゲル電気泳動、ガスクロマトグラフィ、イオン拡散等の他の分離技術と組み合わせられる。そのような技術を組み合わせることで得られたデータは、n次元のデータセットとして表されることができる。たとえば、クロマトグラフィの保持時間と質量スペクトルの質量対電荷比が、第1および第2の軸からなる座標として使用されることができる。その座標に関連付けられた信号強度がデータ値の2次元配列として表されることができ、そのようなデータは、画像または画像データと呼ぶことができる。
【0017】
質量分析と液体クロマトグラフィは、生物サンプルの評価に適用されることが可能な2つの重要な分離技術であり、以下の説明ではLC/MSデータセット(本明細書では画像または画像データと呼ぶ)が使用されるが、他の種類のデータが使用されてよい。典型的な生物試料には、蛋白質、炭水化物、脂質、および代謝産物の混合物があるが、他の化学または生物試料が同様に調査されることができ、ここに開示される方法および装置は非生物試料にも適用されることができる。
【0018】
開示される方法および装置の例の一部は、薬剤研究に関連する。薬学医療研究はしばしば、病態や投薬を用いた治療に対する反応等の生理的状態の指標である生物化学物質を特定することを目指す。そのような化学物質の1つまたは複数からなるセットは、バイオマーカと呼ばれる。バイオマーカを使用して、病態あるいは他の生理的状態を診断することができる。バイオマーカは、研究所で臨床エンドポイントの代用として使用されることができ、そのようなバイオマーカは、代理エンドポイントと呼ばれる。代理エンドポイントを使用すると、被験者、さらには被験動物を要することなく医薬品を開発することができる。薬の開発は、試験管で代理エンドポイントの存在を検査することによって開始することができる。
【0019】
一般的なシナリオは、生検試料、血液、唾液、羊水等の生物試料を、その試料に関連する複合化学混合物が液体クロマトグラフィ/質量分析機器に取り込まれるように処理するものである。そして、その処理の結果得られたデータ(保持時間およびm/z比に応じた信号強度)が使用されて、その複合混合物中の生化学物質を同定する。ここに開示される方法および装置は、データの一部のみを選択することにより、生物化学的に関連性がより高いデータを識別することを可能にする。具体的には、本方法および装置は、典型的には対象の信号に混入する可能性があるノイズまたは他の外部信号から対象とする信号部分を分離または抽出することにより、LC/MSのデータセットから、向上した信号対雑音比を有する1つまたは複数の化学物質の対象信号を特定することを可能にする。1つまたは複数の成分(moiety)に関連する信号部分を除去または部分的に除去することにより、さらに他の信号特徴の調査を可能にすることができる。たとえば、他のピークがより明瞭に示されるように、特定の成分に関連するピークを除去することができる。
【0020】
本明細書に開示される要領で分析データを処理すると、複合混合物中の化学物質の優れた分離および同定と、より好適な定量化が得られる。研究者は、健常被験者と罹患被験者および/または未治療被験者と既治療の被験者についてこの分析工程を繰り返すことができる。そのようにして同定された健常被験者と罹患被験者間、または未治療被験者と既治療被験者間での化学物質成分の違いに基づいて、バイオマーカが定義されることができる。場合によっては、そのバイオマーカは、臨床エンドポイントの代用として用いる代理エンドポイントの役割を果たすことができる。そのようなバイオマーカは、薬の開発で診断および治療の指標として使用することができる。
【0021】
本明細書では、液体クロマトグラフィ(LC)および質量分析(MS)に基づく画像に関して代表的な実施形態を説明する。通例は、LCの保持時間とMSの質量対電荷比(m/z)の関数として信号強度が記録され、この記録された信号強度は、画像データ配列として記憶または処理されることができる。本明細書では、便宜上、保持時間は一般に水平線(x軸)に沿って配置され、m/zは垂直線(y軸)に沿って配置される。他の例では、LC保持時間またはm/z比の代わりに、またはそれらに加えて、他の種類のデータが使用される。たとえば、ガスクロマトグラフィ(GC)、イオン分光、ゲル電気泳動、イオン拡散、あるいは質量分析の飛行時間データを使用することができる。
【0022】
以下の例では、生物サンプルの評価に関連する分析結果が、複製と呼ばれるデジタル画像として取り込まれる。強度の変化は、複製全体にわたって分散される。上記で述べたように、従来の評価技術は、複製間の様々な強度の変化間の対応関係を識別することができない。いわゆる「タイムワーピング」を使用してそのような強度の変化を位置合わせすることにより、ノイズである変化をより適切に特定し、ノイズではない強度変化を明らかにすることができるが、いくつかの強度変化を位置合わせすると、結果として他の強度変化の位置がずれてしまい、それらの強度変化の一部は重要な特徴である可能性もある。
【0023】
図1Aは、生物サンプルを処理して生物学的特徴を検出するシステム100を示す。科学実験では、各生物サンプルは、同じ実験(治療条件)または異なる実験(治療条件)にかけられ、その結果、調製済み生物サンプル102が得られる。その調製済み生物サンプル102は、たとえば、各種の液体クロマトグラフィおよび質量分析処理を適用するLC/MS機器104でさらに処理される。その結果は、1つまたは複数のLC/MS画像または構成画像であり、それらの画像は、ハードウェアおよび/または1つまたは複数のコンピューティングデバイスで実行されるソフトウェアを含む反復領域プロセッサ105でさらに処理される。反復領域プロセッサ105から提供される処理後の領域は、ハードウェアおよび/または1つまたは複数のコンピューティングデバイスで実行されるソフトウェアを含む対象領域プロセッサ106でさらに処理される。幾何学的形状および相関に基づく各種スコアにより、システム100は、調製済み生物サンプル102から抽出された生物学的特徴を分類して、1つまたは複数の対象とする生物学的特徴110を識別することができる。
【0024】
図1Bは、反復領域プロセッサ105の多くの部分の中の一部分112をより詳細に図示する。部分112は、一実施形態では合成画像内で、また別の実施形態では合成画像を使用せずに、ピーク検出を精密化するのを助ける。部分112は、ピーク等の対象領域を識別し、また複数の画像からの情報を使用して、複数の画像上で適切に再現可能なピークの範囲を包囲するようにピークの境界エリアを再定義する。画像の集まりにある各画像は、LC/MS(液体クロマトグラフィ/質量分析)画像、または複製、または構成画像、またはLC/MSの実行(run)として参照されることができる。ピークは、1つまたは複数の画像上に適切に表される。しかし、境界エリアは、そのピークをとらえるために各画像上で異なってよい。各境界エリアは、大きさと位置が異なってよい。境界エリアの中には、たとえば不適当な分割技術のために誤って境界エリアの中に取り込まれた可能性のあるアーチファクトを含んでいるものがある。一部の構成画像では、境界エリアがまったく欠落している場合もある。異なる画像の境界エリアをより好適に比較するのを助けるために、境界エリアは、異なる画像間で適切にほぼ同じ大きさにすべきである。それにより、当該の対象領域が代表境界エリアに局所化され、その境界エリアを使用して複数の画像についての異なる境界エリアの代わりとすることができる。この代表境界エリアは、求めようとする各種画像のピークを明らかにするツールに相当する。
【0025】
反復領域プロセッサ110の部分は、リコンシリエータ(reconciliator)114を含む。リコンシリエータ114は、複数の構成画像上の溶出種を識別する。すなわち、1つまたは複数の構成画像が、対象の溶出種とともに、多くの場合は対象の溶出種の非常に近くにある異なる形で溶出された多くの種を含んでいる可能性がある。難しいのは、ある構成画像上の1つのピークを、まったく同じ溶出種を表す他の構成画像上の他のピークに関連付けることである。リコンシリエータ114は、この識別を助ける。当業者には理解されるように、適切な実装の1つはピーク再構築技術の使用である。そのような技術により、通例マクロアラインでは重ね合わせることができない複数の画像からのピークを相関付けることが可能になる。他の適切な技術が可能である。この構成画像を使用して、一実施形態では、合成画像を形成するための構成画像の平均化や最大投射等の適切な技術により、合成画像を生成することができる。合成画像上のスポットの形状や強度などの変化が、特徴の境界線を決定する。スポットは、構成画像中で連続した1つの範囲を構成する強度ピークである。多重化された構成画像が合成画像を形成する。そのような画像中では、構成画像にあるピークが重なり合う、あるいは他の構成画像のピークと近接している場合がある。そのようにして対応し合うピークは、同じ化学物質から生じたものと推定される。異なる構成画像にある対応し合うピークは、行われる可能性のあるマクロアラインの後であっても、溶出時間の違いのために合成画像上で重なり合うか、互いに近接している。別の実施形態では、合成画像を用いずに、構成画像を使用して分析が行われる。
【0026】
部分112は、マイクロアライナ(microaligner)116を含む。マイクロアライナ116は、保持時間の次元で位置合わせを行って、液体クロマトグラフィ工程に伴う不確定性や不十分な較正を克服する。一実施形態では、マイクロアライナ116は、保持時間の次元で、対象とする一領域の画素を、他の構成画像上の同じ仮想対象領域にある画素と位置合わせする。構成画像のその他の部分と構成画像上の他の対象領域は、考慮されず、それらの対象領域部分が同じ保持時間を有する場合でも影響されない。このように一度に1つの対象領域に注目することにより、従来のタイムワーピングでは不可能な位置合わせが可能になる。
【0027】
マイクロアライナ116は、以前に検出された対象領域から境界線が導出されている構成画像中の対象領域を位置合わせする。この検出は一実施形態では合成画像を使用して行われている可能性があるが、別の実施形態では合成画像を使う必要はない。構成画像中の対象領域をマイクロアラインすることにより、生物学的特徴またはその欠如等の手がかりを明らかにする、ピークの相関付けと領域のスコア付けを助けることができる。部分112等によりマイクロアライン後に対象領域の境界線を再定義すると、対象領域を絞り込んで元の対象領域の一部であったノイズを排除することにより、対象領域中のノイズを低減、除去、または最小に抑えるのを助けることができる。
【0028】
マイクロアライナ116は、合成画像がなくとも対照領域の位置合わせを精密化することができる。本例では、各種の構成画像上の対象領域のマクロアラインされた境界エリアが重なり合うか、互いと近接している場合、それらの領域は相互に関係付けられ、同じ化学種にあったものと推定される。そのような対象領域は、それらの構成画像上で互いに対応している。そして、マイクロアライナ116は、互いに対応する対象領域のセットを位置合わせする。マイクロアラインにおける合成画像の使用法の1つは、複数の構成画像にある対象領域を関連付けるものである。この使用法では、合成画像で共通の対象領域を識別し、その共通の対象領域が、各構成画像の保持時間の違いを考慮してすべての構成画像に適用されることができる。互いに対応する対象領域のセットが合成画像を用いずに識別できる場合は、それらの対応対象領域のセットはマイクロアラインすることができる。
【0029】
反復領域プロセッサ106は、領域リデファイナ118を含む。各種の構成画像中で対象領域をとらえるための境界線が異なるため、それらの対象領域は、対象としないアーチファクトを含む可能性がある。そのようなアーチファクトは、周囲の背景や隣接する混入物等のノイズであり、対象画素を含む信号と対比される。合成スニペット(snippet:断片)を作成することにより、対象とする画素をより多く含み、ノイズ等の対象としない画素をより少なく含むように、元の対象領域を再定義することができる。ノイズが少ないほど、信号がより好適に識別され、科学的発見につながる生物学的な手がかりを明らかにするためのより良好なスコア付けが可能になる。領域リデファイナ118は、対象の生物学的特徴を示す同じ手がかりをそのすべてが指す構成画像にわたってピークの境界エリアに変更を加える。その結果、共通の境界エリアが得られ、この境界エリアは、ピークの評価と比較のための統計モデルを改良することによってピークの定量化を容易にする効果がある。
【0030】
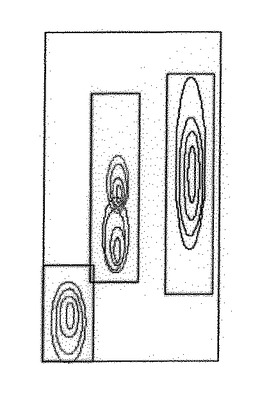
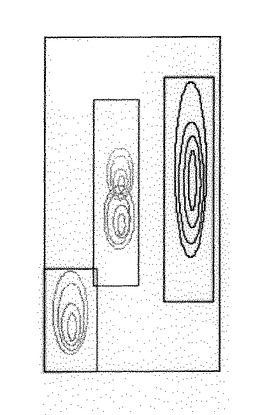
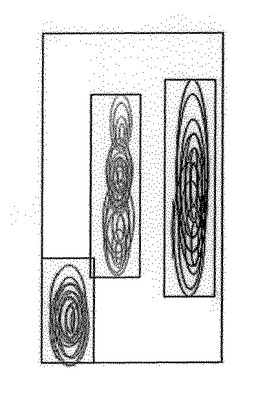
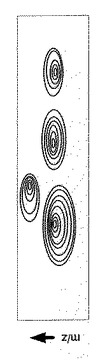
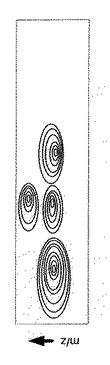
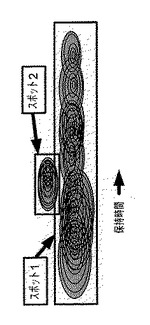
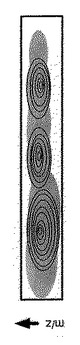
図2Dに、図2A〜2Cに示す構成画像から形成された合成画像を図示する。構成画像を組み合わせて合成画像を形成するには、平均化や最大投射等の各種の適切な技術がある。適切には、平均化を使用して信号対雑音比を向上させる。分割工程が適用されて、ピークを含む可能性の高い細分エリアを得る。図に示すピークは、入れ子状の一連の楕円として表している。内側の楕円は、より高い信号強度を意味し、したがって楕円による表現は地形図に似る。強度の最大値は、最も小さい楕円の中に位置する。楕円の間隔は、一定の信号強度の刻み幅に対応している。次いで、ピーク再構築等の適切な関連付け工程が実行されて、個々の種を反映している可能性の高い境界エリアによって位置が同定された要素を得る。図2Dではこの境界エリアは長方形の枠として表しているが、境界エリアは、楕円、円、矩形、長円、多角形、あるいは他の正則または非正則の連続形状であってよい。図2A〜2Cを参照すると、境界エリアは、構成画像上に投影されることができ、1つの構成画像中で1つの境界エリアで囲まれたピークは別の構成画像中の同じ境界エリアで囲まれている別のピークと関連付けられているとみなすという意味で、対応し合う境界エリアによって囲まれた情報は照合されたとみなされる。
【0031】
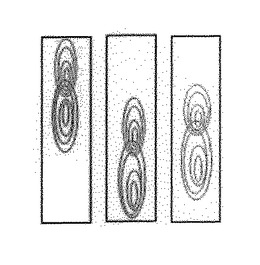
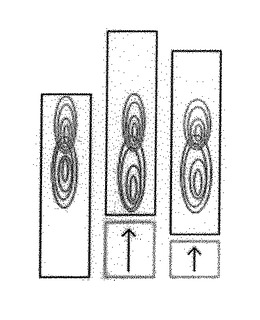
図3Aに、図2A〜2Cに見られる構成画像のスニペットを示す。理解できるように、これらのスニペットはマイクロアラインされていない。これらの図面中のピークは、上記のように一連の楕円として視覚的に表されている。一番上のスニペット中のピークは、右に寄っている。中央のスニペット中のピークは左に寄っており、一番下のスニペット中のピークは左に向かっている。マイクロアライン工程を開始するために、同じ大きさの境界エリアがこれらのスニペットに適用される。図3Aを参照されたい。次いで、マスタスニペットが選択され(この例では一番上のスニペット)、そのマスタスニペットに合わせて他のスニペット(中央のスニペットおよび一番下のスニペット)がマイクロアラインされることになる。図3Bには中央のスニペットと一番下のスニペットが左に移動された様子を示す。異なる長さの2つの矢印は、マスタスニペット(一番上のスニペット)とのマイクロアラインを達成するために移動が行われた程度を示している。図3Cは、図3Bに示すマイクロアライン後のスニペットから形成された合成スニペットを示す。
【0032】
図4Aは、マイクロアラインされたスニペットから形成された合成スニペットを示し、この合成スニペットは、互いに隣接している2つのピークを識別するための画像分割を施されている。分割工程は、対象領域を再定義する隣接する境界エリアを明らかにする。境界エリアは矩形の枠として表しているが、他の形状が使用されてよい。図4B〜4Dは、マイクロアラインされ、合成され、分割された画像から識別された境界エリアを構成画像に適用した様子を示す。この適用により、対象ピークの境界線を再定義する。
【0033】
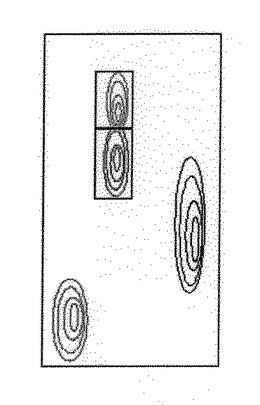
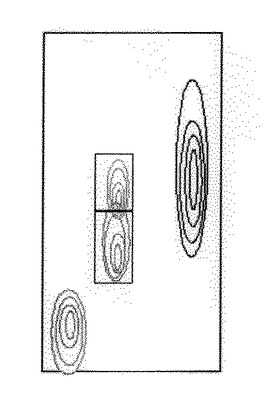
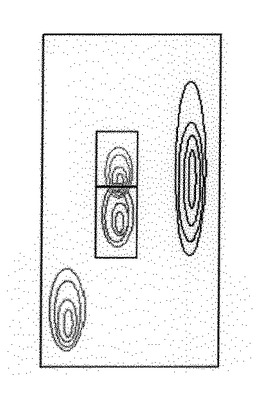
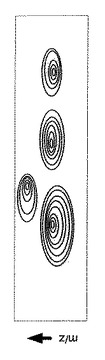
図5A〜5Cに、構成画像上のピークを図示する。これらのピークは互いに関連付けられていない。そのため、これらのピークの一部が、対象とする生物学的特徴を明らかにする同じ手がかりを指しているかどうかについては結論を出すことができない。ピークは、他の楕円を含む楕円として視覚的に表現されている。各内側の楕円は、地形図のようにより高い強度を視覚的に示し、したがって、他のより大きな楕円の中に含まれる最も小さい楕円が強度最大値の頂点を含んでいる。図5A〜5Cの構成画像はマクロアラインされたと想定することができるが、そのマクロアラインは、残った局所的な位置ずれが残っているため不完全と思われる。
【0034】
図5Dに、図5A〜5Cの構成画像の多重化から形成された合成画像を示す。図5Eは、図5Dの合成画像に分割工程を実行することから形成された2つのスポットを示す。この2つのスポット(上のマスクと下のマスク)は、本発明の主題の各種実施形態に従ってさらに領域再定義で処理すべき情報を識別する境界エリアを有する。図5Fを参照されたい。図5Gは、細長く、図5Fでスポット1と呼んでいる合成画像中の情報を識別する下のマスクの選択を示している。このマスクの境界エリアを使用して、マスクの境界エリアを構成画像に適用してスニペットを形成することにより、さらなる情報が識別される。図5H〜5Jを参照されたい。
【0035】
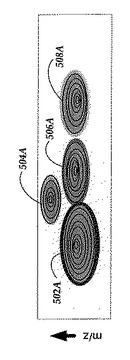
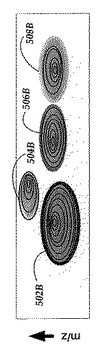
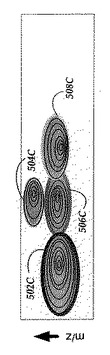
次いでスニペットがマイクロアラインされる。図5K〜5Mを参照されたい。図5K〜5Mでは、スニペットに含まれるピークをマイクロアラインするために、スニペットは位置が不揃いになっている。図5Nは、図5K〜5Mのマイクロアラインされたスニペットから形成された合成スニペットを示す。図5Oは、以下の図面の説明を容易にするための合成スニペットの表現である。図5Pは、2つのマスクを形成するための合成スニペットの分割を示す。図5Qは、2つのマスクの境界エリアを使用して、合成スニペットの2つの対象領域を区別する様子を示す。上記の工程が繰り返された結果、図5Rは3つの別個のピークの識別を示す。図5Sは、それら別個のピークから形成されたマスクを示す。このマスクが元の構成画像に適用されて、互いに関連付けられたピークを明らかにし、したがって対象とする生物学的特徴の手がかりを明らかにする。図5Sのマスクは、図5T〜5V各々の下の3つのピークに適用される。上のスポットのためのマスクは、図5Fのスポット2から導出される。図5T〜5Vは、構成画像間で対応し合うピークを領域的に再定義した後である。図5T〜5V間で対応するピークは、502A〜502C、504A〜504C、506A〜506C、および508A〜508Cである。
【0036】
図6A〜6Cは、構成画像上のピークを示す。これらのピークは互いに関連付けられていない。したがって、これらのピークの一部が、対象とする生物学的特徴を明らかにする同じ手がかりを指しているかどうかについては結論を出すことができない。ピークは、他の楕円を含む楕円として表されている。上記のように、各内側の楕円は、地形図のようにより高い強度を視覚的に示す。図6D〜6Fは、図6A〜6Cの構成画像に実行された分割工程の結果得られたスポットのマスクである。図6G〜6Iはそのスポットマスクを示すが、互いに関係を持つマスクは、構成画像間を横断する線で視覚的に結ばれている。
【0037】
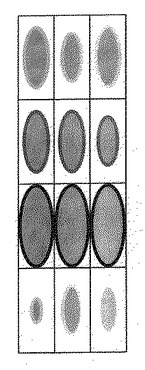
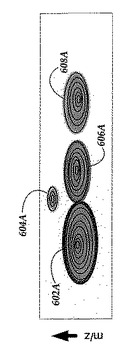
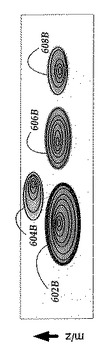
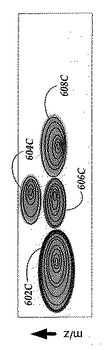
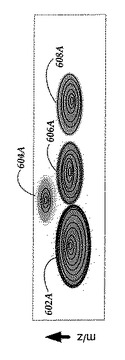
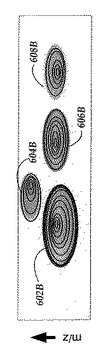
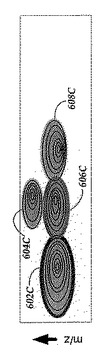
図6Jは、列と行からなる行列を示す。各列と各行の交差点にスポットマスクが格納される。各列は、恐らくは同じ生物学的手がかりまたは生物種を指すピークを明らかにする、互いに関係のあるスポットマスクを指す。各行は、同じ構成画像上にあるスポットマスクを指す。たとえば、1番目の行は、第1の構成画像(図6A)から得られたスポットマスクを指し、2番目の行は、第2の構成画像(図6B)から得られたスポットマスクを指し、3番目の行は、第3の構成画像(図6C)から得られたスポットマスクを指す。図6Kは、複数の列と1つの行を有する別の行列を示す。この1つの行は、異なる生物学的手がかりまたは化学種に対応するピークに関連付けられた共通スポットマスクを表す。一実施形態では、共通スポットマスクは、図6Jの行列の列にあるすべてのスポットマスクの中で最も大きいものである。別の実施形態では、図6Jの行列の各列のスポットマスクの和集合が、その列の共通スポットマスクとなる。第3の実施形態では、共通スポットマスクは、図6Jの行列の同じ列のスポットマスクの和集合に収まる最も大きな楕円である。関係のあるピークは、それぞれ図6L〜6Nの構成画像に示すように、ピーク602A〜602C、604A〜604C、606A〜606C、および608A〜608Cである。図6O〜6Qは、図6Kの行列の共通スポットマスクに従って関係付けられ、識別され、境界が定められたピークを含む構成画像を示す。
【0038】
集約されたピークマスクは、クッキーの抜き型方式で構成画像上に配置される。配置の位置は、マクロアラインとマイクロアラインを考慮に入れる。図5の例では、図5T〜5Vが、この工程の結果である、領域的に再定義されたピーク検出を表す。図6の例では、図6L〜6Qが、この工程の結果である、領域的に再定義されたピーク検出を表し、図6では中間のマイクロアライン合成画像は生成されていない。
【0039】
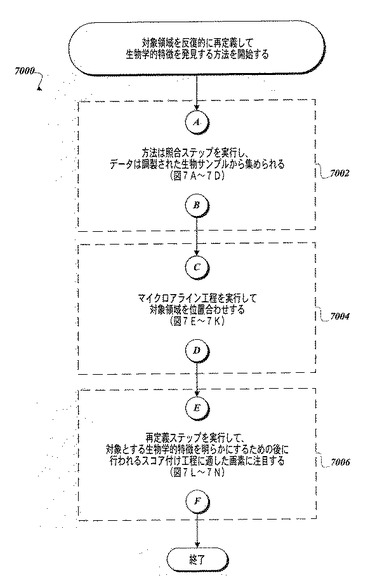
図7A〜7Nは、対象領域を反復的に再定義して生物学的特徴を発見する方法7000を説明する。開始ブロックから、方法7000は、継続端子(「端子A」)と終了端子(「端子B」)の間に定義された方法ステップのセット7002に進む。方法ステップのセット7002は、調製された生物サンプルからデータが導出される照合ステップのセットの実行について記述する。照合ステップでは、異なる構成画像にあるピークを関連付ける。図7B〜7Dを参照されたい。そのような構成画像が図5A〜5Cに例示される。これらの構成画像はマクロアラインされていると想定することができるが、そのマクロアラインは、局所的なずれが残っているために不完全である。図5Dに示すような合成画像の照合工程に関して、合成画像に行われる画像分割により、図5Eに示すようなピークのセットを生成する。望ましい結果では、1つのピークで単一の化学種が表され、各ピークは1つのみの科学種を表す。ただし、過分割あるいはピークの併合が発生する可能性がある。過分割は、実際には同じ単一の種を表している可能性のある複数のピークを生じさせる可能性がある。そのような過分割されたピークは、再構築して単一のピークに戻す必要がある。過分割されたピークを再構築するために、ピーク再構築工程を実行するピークリアセンブラ(reassembler)が適当に使用されてよい。逆に、図5A〜5Cに例示するような構成画像間のずれは、1つの合成画像上で異なる科学種を指すピークの併合を引き起こす可能性がある。この状況を図5E〜5Fに示すが、図5Fでスポット1と呼んでいるピークの凝集が図5A〜5Cの多重化の結果発生している。こうした場合は、マイクロアラインを行い、その後分割を行うことによって、種の分離が達成される。合成画像を用いない場合の構成画像のセットの照合工程に関して、各個々の構成画像単独に画像分割が実行されて、各個々の構成画像についてのピークのリストを作成する。本方法は次いで、他の構成画像のピークが同じ種を指している場合は、構成画像上のピークをそれら他の構成画像のピークに関連付ける。
【0040】
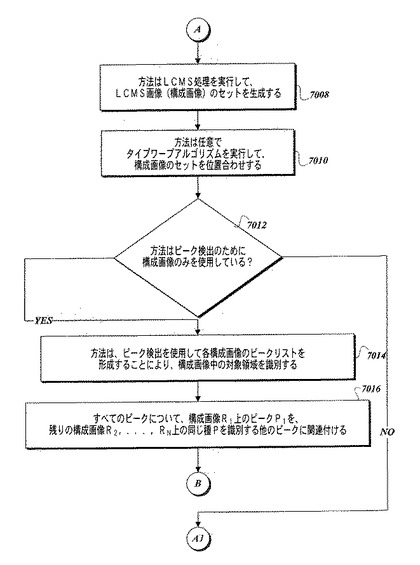
端子A(図7B)から、方法7000はブロック7008に進み、LC/MS処理を実行してLC/MS画像(構成画像)のセットを生成する。ブロック7010で、方法は任意でタイムワープアルゴリズム等のマクロアライン工程を実行して、構成画像のセットの位置合わせをする。そのような構成画像を図5A〜5Cに図で例示する。これらの構成画像はすでにマクロアラインされたと想定することができるが、そのマクロアラインは、局所化されたずれが残っているため不完全と思われる。方法は次いで判定ブロック7012に進み、検査が行われて、本方法が領域再定義のための入力として構成画像のみを使用しているかどうかを判定する。この検査の答がNoである場合、方法は別の継続端子(「端子A1」)に進む。(すなわち、方法は、ピークマスクを判定するために構成画像を使用する代わりに合成画像の使用を選択する。)そうでなく(その場合、方法は構成画像に基づく合成画像ではなく構成画像のみを使用することを選択する)、この検査の答がYesである場合は、方法7000はブロック7014に進み、ピーク検出を使用して各構成画像のピークリストを形成することにより、構成画像中の対象領域を識別する。ブロック7016で、方法は、構成画像R1上のピークP1が、残りの構成画像R2,..,RN上の同じ種Pを識別する他のピークと関連付けられるようにすべてのピークを検討する。方法は次いで終了端子Bに入る。
【0041】
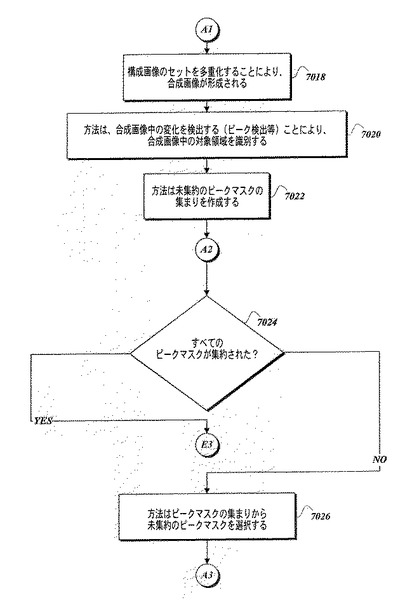
端子A1(図7C)の後、構成画像のセットから合成画像が形成される。ブロック7018を参照されたい。そのような合成画像を図5Dに図で例示する。方法7000は次いで、合成画像中の変化を検出(ピーク検出等)することにより、合成画像中の対象領域を識別する。ブロック7020を参照されたい。ピーク検出の結果、ピークの位置および境界を定義するピークマスクが得られる。図5Eは、図5Dに例示する合成画像から導出することが可能な例示的なピークマスクの図表現である。ブロック7022で、方法は、ピークマスクの集まりを作成する。初めは、すべてのピークは、集約されていないものとみなされる。次いで、方法は別の継続端子(「端子A2」)に進む。端子A2から、方法は判定ブロック7024に進み、検査が行われて、すべてのピークマスクが集約したかどうかを判定する。判定ブロック7024でこの検査の答がYesである場合、方法は別の継続端子(「端子E3」)に進み、実行を終了する。そうでなく、判定ブロック7024における検査の答がNoである場合は、方法はブロック7026に進み、ピークマスクの集まりから未集約のピークマスクを選択する。方法は次いで別の継続端子(「端子A3」)に入る。
【0042】
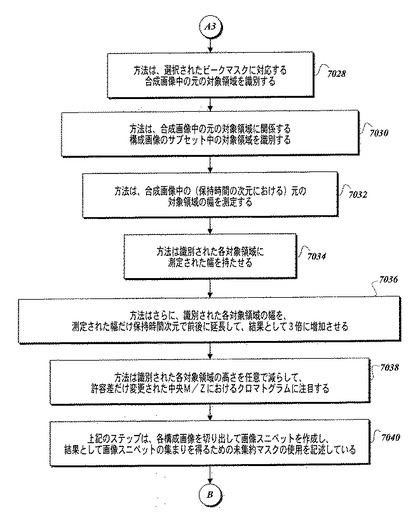
端子A3(図7D)から、方法は、ブロック7026で選択されたピークマスクを含んでいる合成画像中の対象領域を識別する。この対象領域を元の対象領域と呼ぶ。ブロック7028を参照されたい。図5Gは、そのような元の対象領域を図の形で例示している。ブロック7030で、方法は、境界および位置が合成画像中の元の対象領域に関係する、構成画像中の対象領域を識別する。各構成画像上の対象領域は、合成画像によって決定され、次いで各構成画像のマクロアラインを考慮して構成画像上にクッキーの抜き型方式で投影される。図5H〜5Jは、図5Gに例示される元の対象領域を使用して識別された各構成画像の個々の対象領域を例示する。方法は、合成画像中の(保持時間の次元における)元の対象領域の幅を測定する。ブロック7032を参照されたい。方法はさらに、識別された各対象領域の幅を、測定された幅だけ保持時間次元で前後に延長して、結果として3倍に増加させる。ブロック7036を参照されたい。ブロック7038で、方法は、識別された各対象領域の高さを任意で減らして、許容差だけ変更された中央質量/電荷におけるクロマトグラムに注目する。要するに、上記のステップは、各構成画像中の画像スニペットを識別して画像スニペットの集まりを得るための未集約の合成ピークマスクの使用を記述している。
【0043】
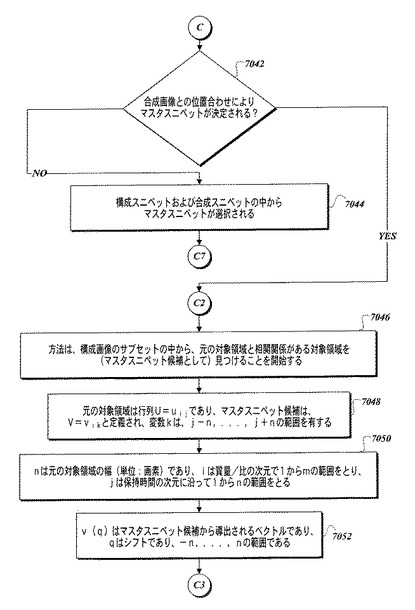
端子B(図7A)から、方法7000は、継続端子(「端子C」)と終了端子(「端子D」)の間に定義された方法ステップのセット7004に進む。方法ステップのセット7004では、対象領域を位置合わせするマイクロアライン工程を実行する。端子C(図7E)から、方法7000は判定ブロック7042に進み、検査が行われて、合成画像との位置合わせによって構成画像からマスタスニペットが決定されるかどうかを判定する。判定ブロック7024における検査の答がNOである場合、方法7000は、ブロック7044に進み、無作為選択を含む他の手段により構成スニペットと合成スニペットの中から適切なマスタスニペットが選択される。方法は次いで、別の継続端子(「端子C7」)に進む。一方判定ブロック7042の検査に対して答がYESである場合は、方法は別の継続端子(「端子C2」)に進む。
【0044】
端子C2(図7E)から、方法7000はブロック7046に進み、構成画像のサブセットの中から、元の対象領域と相関関係がある対象領域を(マスタスニペット候補として)見つけることを開始する。ブロック7048で、元の対象領域は行列U=uijであり、マスタスニペット候補は、V=vikと定義される。変数kは、j−n,...,j+nの範囲を有し、nは元の対象領域の幅(単位:画素)である。ブロック7048を参照されたい。変数iは、質量/比の次元で1からmの範囲をとる。ブロック7050を参照されたい。変数jは、保持時間の次元に沿って1からnの範囲をとる。ブロック7050を参照されたい。ブロック7052で、v(q)は、マスタスニペット候補から導出されるベクトルである。変数qは、保持時間のシフトを表し、−n,...,nの範囲である。ブロック7052を参照されたい。方法7000は次いで別の継続端子(「端子C3」)に進む。
【0045】
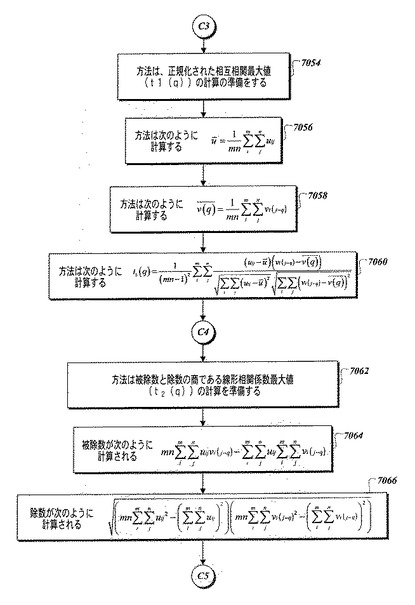
端子C3(図7F)から、方法は、正規化された相互相関最大値t1(q)の計算の準備をする。ブロック7054を参照されたい。ブロック7056で方法は次の項
【0046】
【数1】

【0047】
を計算する。
【0048】
項
【0049】
【数2】
【0050】
は、上記の数学演算の結果である。ブロック7058で、方法はさらに次の項
【0051】
【数3】
【0052】
を計算する。
【0053】
その結果得られる
【0054】
【数4】
【0055】
が、その数学演算の結果である。方法7000はブロック7060に進み、次の式からt1(q)を計算する。
【0056】
【数5】
【0057】
方法7000は別の継続端子(「端子C4」)に進む。端子C4(図7F)から、方法はブロック7062に進み、被除数と除数の商である線形相関係数最大値t2(q)の計算を準備する。ブロック7064で、被除数が次のように計算される。
【0058】
【数6】
【0059】
ブロック7066で除数が次のように計算される。
【0060】
【数7】
【0061】
方法7000は次いで別の継続端子(「端子C5」)に進む。端子C5(図7G)から、方法は、正規化された最小二乗差最小値t3(q)の計算を準備する。ブロック7068を参照されたい。方法は次の式を計算する。
【0062】
【数8】
【0063】
ブロック7070を参照されたい。方法は次いで別の継続端子(「端子C6」)に進む。端子C6(図7G)から、方法はブロック7072に進み、正規化された相互相関最大値、線形相関係数最大値、および正規化された最小二乗差最小値の中から対象領域のスコアが選択される。方法7000は判定ブロック7074に進み、検査が行われて、すべての構成画像がその対象領域について評価されたかどうかを判定する。判定ブロック7074における検査の答がNOである場合、方法は端子C2に進み、ブロック7046にループバックして上記の処理ステップが繰り返される。そうでなく、判定ブロック7074における検査の答がYESである場合は、方法はブロック7076に進み、合成画像中の元の対象領域と最も高く相関するスコアを有する対象領域が、マイクロアラインの際のマスタスニペットとして選択される。方法は次いで別の継続端子(「端子C7」)に進む。
【0064】
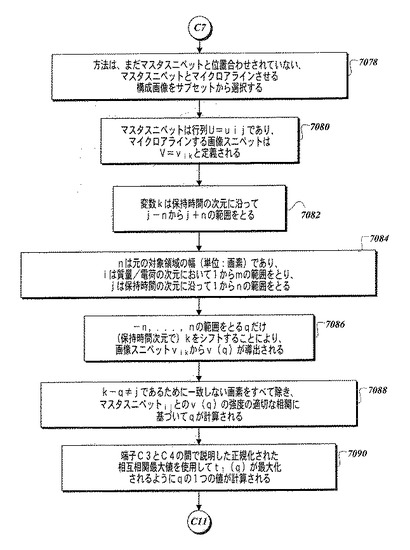
端子C7(図7H)から、方法は、マスタスニペットとマイクロアラインされる対象領域(画像スニペット)を、サブセット中の構成画像内から選択する。ブロック7078を参照されたい。マスタスニペットは行列U=uijであり、マイクロアラインする画像スニペットはV=vikと定義される。ブロック7080を参照されたい。さらに、nは元の対象領域の幅(単位:画素)であり、iは質量/電荷の次元において1からmの範囲をとり、jは保持時間の次元に沿って1からnの範囲をとり、kは保持時間の次元に沿ってj−nからj+nの範囲をとる。ブロック7082、7084を参照されたい。−m,...,nの範囲をとるqだけ(保持時間次元で)kをシフトすることにより、画像スニペットvikからv(q)が導出される。ブロック7086を参照されたい。k−q≠jであるために一致しない画素をすべて除き、マスタスニペットijとのv(q)の強度の適切な相関に基づいてqが計算される。ブロック7088を参照されたい。位置合わせのタイミングを決める各種方式を使用してよい。以下に述べるのはいくつかの方式の例である。qの値の1つは、端子C3とC4の間で説明した正規化された相互相関最大値を使用してt1(q)が最大化されるように計算される。ブロック7090を参照されたい。方法7000は、別の継続端子(「端子C11」)に進む。
【0065】
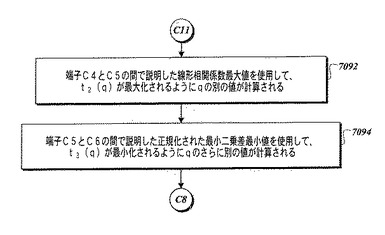
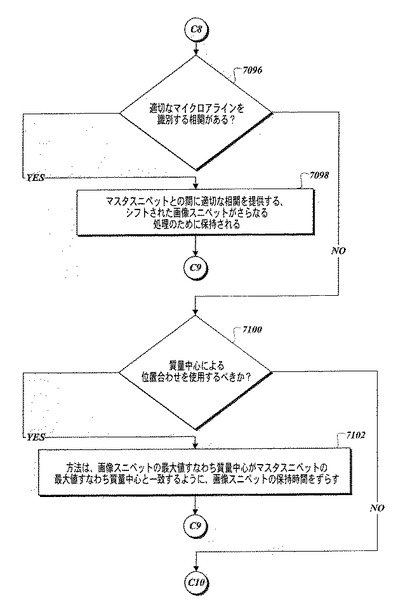
端子C11(図7I)から、端子C4とC5の間で説明した線形相関係数最大値を使用して、t2(q)が最大化されるようにqの別の値が計算される。ブロック7092を参照されたい。端子C5とC6の間で説明した正規化された最小二乗差最小値を使用して、t3(q)が最小化されるようにqのさらに別の値が計算される。ブロック7094を参照されたい。方法7000は次いで別の継続端子(「端子C8」)に進む。端子C8(図7J)から、方法は判定ブロック7096に進み、検査が行われて、適切なマイクロアラインを識別する相関があるかどうかを判定する。判定ブロック7096の検査の答がYESである場合、マスタスニペットとの間に適切な相関を提供する、シフトされた画像スニペットが、さらなる処理のために保持される。ブロック7098を参照されたい。方法は次いで別の継続端子(「端子C9」)に進む。判定ブロック7096における検査の答がNOの場合、方法は別の判定ブロック7100に進み、検査が行われて質量中心による位置合わせを使用すべきかどうかを判定する。判定ブロック7100における検査の答がYESである場合、方法は、画像スニペットの最大値すなわち質量中心がマスタスニペットの最大値すなわち質量中心と一致するように、画像スニペットの保持時間をずらす。ブロック7102を参照されたい。方法は次いで端子C9に進む。判定ブロック7100における検査の答がNOの場合、方法は別の継続端子(「端子C10」)に進む。
【0066】
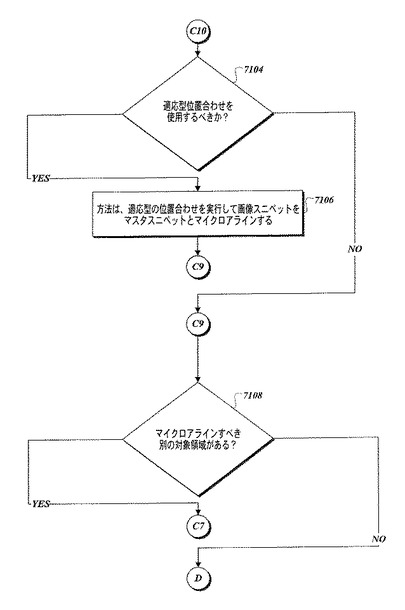
端子C10(図7K)から、方法は判定ブロック7104に進み、検査が行われて、適応型位置合わせ等の別の位置合わせ方法を使用すべきかどうかを判定する。判定ブロック7104における検査の答がYESの場合、方法は、別の形式の位置合わせを実行して画像スニペットをマスタスニペットとマイクロアラインする。ブロック7106を参照されたい。方法は次いで端子C9に進む。判定ブロック7104における検査の答がNOの場合、方法は端子C9に進み、さらに判定ブロック7108に進み、検査が行われてマイクロアラインすべき別の対象領域があるかどうかを判定する。判定ブロック7108における検査の答がYESの場合、方法は端子C7に進み、ブロック7082にループバックして、上記で述べた処理ステップが繰り返される。そうでなく判定ブロック7108の検査の答がNOの場合は、方法は終了端子Dに進む。図5K〜5Mは、図5H〜5Jに例示した画像スニペットを前提にマイクロアラインされた対象領域の図示例である。
【0067】
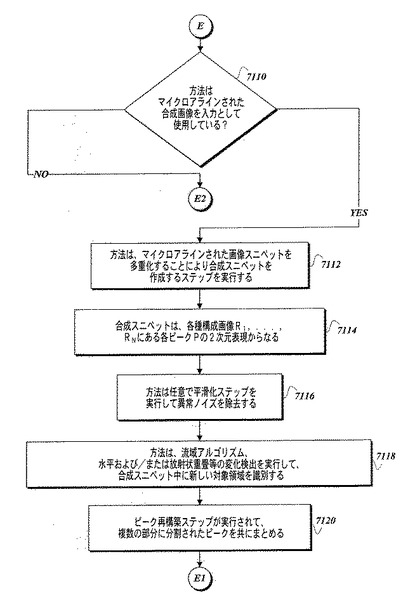
端子D(図7A)から、方法7000は、継続端子(「端子E」)と終了端子(「端子F」)の間に定義された方法ステップのセット7006に進む。方法ステップのセット7006では、より良好な信号対雑音比をとらえ、かつその後のスコア付け工程と科学的評価に適した境界エリアに注目するための境界再定義工程を実行する。端子E(図7L)から、方法は判定ブロック7110に進み、検査が行われて、方法がマイクロアラインされた合成画像を入力として使用しているかどうかを判定する。判定ブロック7110における検査の答がNOの場合、方法は継続端子(「端子E2」)に進む。そうでなく判定ブロック7110における検査の答がYESの場合、方法は、(合成画像中の元の対象領域とは異なる)合成スニペットを作成するステップを実行する。ブロック7112を参照されたい。図5K〜5Mは、方法ステップ7004のマイクロアライン工程の結果得られたマイクロアラインされた対象領域の図示例である。図5Nは、それらのマイクロアライン対象領域から導出された合成スニペットの図示例である。
【0068】
ブロック7114で、合成スニペットは、各種構成画像R1,...,RNにある各ピークPの2次元表現からなる。方法は任意で平滑化ステップを実行して異常ノイズを除去する。ブロック7116を参照されたい。ブロック7118で、方法は、閾値設定、流域アルゴリズム、ガウスの重畳のラプラシアンによる水平および/または放射状エッジ検出等の変化検出(ピーク検出)を実行して、合成スニペット中に新しいピークマスクを識別する。ピーク再構築ステップが実行されて、誤って複数の部分に分割された可能性のあるピークを共にまとめる。ブロック7120を参照されたい。方法は次いで別の継続端子(「端子E1」)に入る。
【0069】
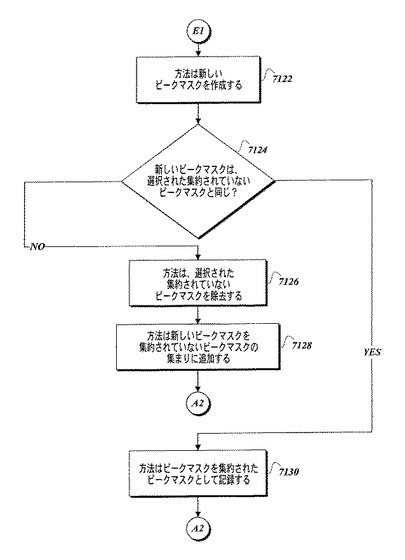
端子E1(図7M)の後、方法は、マイクロアラインされた合成スニペットから新しいピークマスクを作成する。ブロック7122を参照されたい。図5Pは、ピーク検出により図5Oから導出された新しいピークマスクを例示する。方法は判定ブロック7124に進み、検査が行われて、新しいピークマスクが、ブロック7026で選択された集約されていないピークマスクと同じものであるかどうかを判定する。判定ブロック7124における検査の答がNOである場合、方法は、選択された集約されていないピークマスクを除去する。ブロック7126を参照されたい。方法は次いでブロック7128に進み、マイクロアラインされた合成スニペットからの新しいピークマスクを集約されていないピークマスクの集まりに追加する。図5の例では、図5Pと図5Qの両方に示す2つのピークマスクは、最初のマイクロアラインされた合成ピークマスク、すなわち図5Eの下のスポットとは異なっている。この例では、図5Eの下のスポットを表すピークマスクは、集約されていないピークマスクの集まりからは除かれるが、集約されたとは記録されない。図5Pおよび図5Qの両方に示す2つの新しいピークマスクは、未集約のピークマスクの集まりに追加されることになる。方法は次いで端子A2に進み、判定ブロック7024に戻り、上記で述べた処理ステップが繰り返される。そうでなく判定ブロック7124における検査の答がYESの場合、方法はブロック7130に進み、ピークマスクを集約されたピークマスクとして記録する。方法は次いで端子A2に進み、判定ブロック7024に戻って、上記で述べた処理ステップが繰り返される。図5の図示例を想定すると、図5Pに示す2つのピークマスクは、図5Pに示す2つのピークマスクを図5Eから生成した工程と同じ工程により、図5Rおよび図5Sの両方に示す3つのピークマスクに分解される。
【0070】
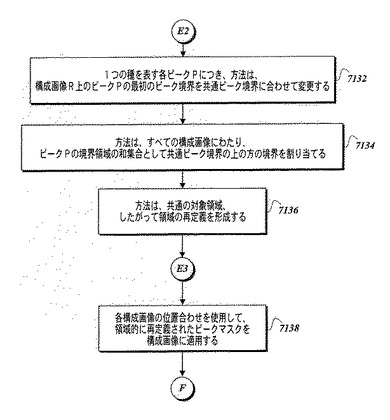
端子E2(図7N)から、方法はブロック7132に進む。1つの種を表す各ピークPにつき、方法は、構成画像R上のピークPの最初のピーク境界を共通ピーク境界に合わせて変更する。ブロック7134で、方法は、すべての構成画像にわたり、ピークPの境界領域の和集合として共通ピーク境界の大きい方の境界を割り当てる。ブロック7136で、方法は、共通の対象領域、したがって領域の再定義を形成する。この工程を図6J〜6Kに図形態で示す。方法は端子E3を通ってブロック7138に進み、領域的に再定義されたピークマスクが、各構成画像の位置合わせを使用して構成画像に適用される。図5T〜5Vおよび図6L〜6Qは、それぞれ図5および図6の例についての反復処理の結果を示す。方法は次いで端子Fに進み、実行を終了する。
【0071】
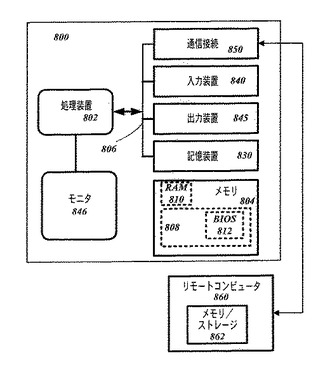
図8および以下の説明は、ここに開示される技術が実装されることが可能な例示的なコンピューティング環境の簡単で一般的な説明を提供するものである。必須ではないが、ここに開示される技術は、パーソナルコンピュータ(PC)によって実行されるプログラムモジュール等のコンピュータ実行可能命令の一般的な文脈で説明される。一般に、プログラムモジュールには、特定のタスクを行うか、特定の抽象データ型を実装する、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造等が含まれる。さらに、ここに開示される技術は、ハンドヘルド機器、マルチプロセッサシステム、マイクロプロセッサを使用した、またはプログラム可能な消費者家電製品、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ等を含む、他のコンピュータシステム構成で実装されてもよい。ここに開示される技術は、通信ネットワークを通じて結ばれた遠隔処理機器によってタスクが行われる分散コンピューティング環境で実施されてもよい。分散コンピューティング環境では、プログラムモジュールは、ローカルおよびリモート両方のメモリ記憶装置に配置されることができる。図8を参照すると、ここに開示される技術を実装するための例示的システムは、例示的な従来のPC800の形態の汎用コンピューティングデバイスを含み、PC800は、1つまたは複数の処理装置802、システムメモリ804、およびシステムメモリ804を含む各種システム構成要素を1つまたは複数の処理装置802に結合するシステムバス806を含む。システムバス806は、各種のバスアーキテクチャを使用した、メモリバスまたはメモリコントローラ、ペリフェラルバス、ローカルバスを含む数種のバス構造のいずれでもよい。例示的なシステムメモリ804は、読み取り専用メモリ(ROM)808とランダムアクセスメモリ(RAM)810を含む。PC800内の要素間の情報転送を助ける基本ルーチンを含んだ基本入出力システム(BIO)812は、ROM808に記憶される。
【0072】
例示的PC800はさらに、ハードディスクへの読み書きを行うハードディスクドライブ、取り外し可能磁気ディスクへの読み書きを行う磁気ディスクドライブ、および取り外し可能光学ディスク(CD−ROMや他の光学媒体)への読み書きを行う光ディスクドライブ等の1つまたは複数の記憶装置830を含む。そのような記憶装置はそれぞれ、ハードディスクドライブインタフェース、磁気ディスクドライブインタフェース、および光ドライブインタフェースによりシステムバス806に接続されることができる。これらのドライブとそれに関連付けられたコンピュータ可読媒体は、コンピュータ可読命令、データ構造、プログラムモジュール、およびPC800のその他のデータの不揮発性の記憶を提供する。磁気カセット、フラッシュメモリカード、デジタルビデオディスク、CD、DVD、RAM、ROM等、PCからアクセスすることが可能なデータを記憶することができる他の種類のコンピュータ可読媒体もこの例示的動作環境で使用されてよい。
【0073】
記憶装置830には、オペレーティングシステム、1つまたは複数のアプリケーションプログラム、他のプログラムモジュール、およびプログラムデータを含む複数のプログラムモジュールが記憶されることができる。ユーザは、キーボードや、マウス等のポインティングデバイス等の1つまたは複数の入力装置840を通じてPC800にコマンドおよび情報を入力することができる。他の入力装置には、デジタルカメラ、マイクロフォン、ジョイスティック、ゲームパッド、衛星受信アンテナ、スキャナ等がある。上記およびその他の入力装置は多くの場合、システムバス806に結合されたシリアルポートインタフェースを通じて1つまたは複数の処理装置802に接続されるが、パラレルポート、ゲームポート、ユニバーサルシリアルバス(USB)等の他のインタフェースで接続されてもよい。モニタ846または他の種の表示装置も、ビデオアダプタ等のインタフェースを介してシステムバス806に接続される。スピーカやプリンタ(図示せず)等の他の周辺出力装置も含められてよい。
【0074】
PC800は、リモートコンピュータ860等の1つまたは複数のリモートコンピュータとの論理接続を使用したネットワーク環境で動作することができる。いくつかの例では、1つまたは複数のネットワーク接続または通信接続850が含まれる。リモートコンピュータ860は、別のPC、サーバ、ルータ、ネットワークPC、ピアデバイス、あるいは他の一般的なネットワークノードでよく、図8にはメモリ記憶装置862のみを示したが、通例はPC800との関連で上述した要素の多くまたはすべてを含む。パーソナルコンピュータ800および/またはリモートコンピュータ860は、ローカルエリアネットワーク(LAN)およびワイドエリアネットワーク(WAN)に接続されることができる。このようなネットワーク環境は、オフィス、企業規模のコンピュータネットワーク、イントラネット、およびインターネットで一般的である。LANネットワーク環境で使用される場合、PC800は、ネットワークインタフェースを通じてLANに接続される。WANネットワーク環境で使用される場合、PC800は通例、インターネット等のWANを通じて通信を確立するためのモデムまたは他の手段を備える。ネットワーク環境では、パーソナルコンピュータ800との関連で図示したプログラムモジュールまたはその一部は、遠隔のメモリ記憶装置、またはLANもしくはWAN上の他の場所に記憶されることができる。図のネットワーク接続は例示的なものであり、コンピュータ間に通信リンクを確立する他の手段が使用されてよい。図の実施形態を参照して本発明の原理を説明および例示したが、ここに例示される実施形態は、そのような原理から逸脱することなく構成および詳細に変更を加えてよいことは認識されよう。たとえば、図でソフトウェアとして示した例示実施形態の要素がハードウェアで実装されてもよく、その逆も同様である。また、任意の例の技術を他の例の1つまたは複数に記載される技術と組み合わせることができる。本発明の原理が適用されることが可能な多数の可能な実施形態に照らして、零時実施形態は本発明の例であり、本発明の範囲の制限と解釈されるべきではないことを理解されたい。たとえば、本明細書に記載されるシステムおよびツールの各種構成要素が、機能および使用において組み合わせられてよい。したがって、請求項の範囲および主旨に該当するすべての主題を本発明として請求する。これらの項目で明確に述べられた代替形態は例示的なものに過ぎず、本明細書に記載される実施形態のすべての可能な代替形態を構成するものではない。例示的実施形態を例示および説明したが、本発明の主旨および範囲から逸脱することなく各種の変更が加えられてよいことが理解されよう。
【0075】
ここに開示される本発明の原理が適用されることが可能な多くの可能な実施形態に照らして、ここに例示される実施形態は本発明の好ましい例に過ぎず、本発明の範囲を限定するものと解釈すべきでないことを理解されたい。本発明の範囲は頭記の特許請求の範囲によって定義される。したがって、その特許請求の範囲の主旨および範囲に該当するすべてを本発明として請求する。
【技術分野】
【0001】
本発明は、化学および生物試料の分析に関する。
【背景技術】
【0002】
本出願は、参照により本明細書に組み込まれている、2008年10月23日に出願した米国特許仮出願第61/107,988号明細書の利益を請求するものである。
【0003】
実験においては、液体クロマトグラフィ/質量分析工程から形成された複数の画像に発見されるピークが、医薬品の発見を明らかにする証拠となる。1つの画像について、境界エリアが定義されて、対象とする生物学的手がかりを表すピークの位置を同定することができる。残りの画像については、すべてが、潜在的に異なる、対象の生物学的手がかりを表す多くの他のピークがある可能性がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、残りの画像中で同じピークが識別され、位置が同定されなければならない。さらに、誤った科学的結論を招きかねない、ピーク境界エリアの中に望ましくないアーチファクトを含める危険性を低減するために、すべての画像上で位置が同定された境界エリアは、すべての画像上にわたるピークを包含するために、必要とされる最小限の境界領域でなければならない。
【課題を解決するための手段】
【0005】
この要約は、以下の詳細な説明でさらに説明する概念の一部を簡略化した形態で紹介するために提供される。この要約は、特許請求の範囲に記載される主題の主要な特徴を明らかにするものでも、特許請求の範囲に記載される主題の範囲を特定する助けとして使用されるものでもない。
【0006】
本発明の主題の一態様は、反復領域プロセッサを含み、この反復領域プロセッサは、構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にするように、ハードウェア上で実行されるように構成された領域リデファイナ(redefiner)を備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。本発明で使用される場合、ピークとは、調査対象の試料が原因となる分析信号中の変化である。液体クロマトグラフィ(LC)と質量分析(MS)の併用では、そのようなピークは通例、溶出時間(または時間間隔)および質量対電荷(m/z)比に関連付けられる。ピークの例には、単一のピーク、ピークのまとまり、あるいは他の連続した信号変化が含まれる。
【0007】
本発明の主題の別の態様は、対象領域を処理して生物学的特徴を発見する方法を含み、この方法は、合成画像を使用して対象領域を再定義するか、または合成画像を使用せずに構成画像のセットを使用して対象領域を再定義するかを選択することを備える。この方法はさらに、対象領域を再定義して構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にすることを備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。
【0008】
本発明の主題のさらに別の態様は、対象領域を処理して生物学的特徴を発見する方法を実装するためのコンピュータ実行可能命令が格納されたコンピュータ可読媒体を含み、該方法は、合成画像を使用して対象領域を再定義するか、または合成画像を使用せずに構成画像のセットを使用して対象領域を再定義するかを選択することを備える。該方法はさらに、対象領域を再定義して構成画像にわたり1つの種を指すピークの境界エリアを変更して、それらピークの定量化を容易にすることを備え、境界エリアは、構成画像にわたりピークの位置を同定するために使用される。
【0009】
本発明の上記およびその他の目的、特徴、および効果は、添付図面を参照しながら進める以下の詳細な説明からより明らかになろう。
【0010】
本発明の上記態様およびそれに付随する効果の多くは、以下の詳細な説明を添付図面と併せて読むことにより、よりよく理解されると、より容易に理解することができよう。
【図面の簡単な説明】
【0011】
【図1A】調製済みの生物サンプルを処理して生物学的候補のリストを研究者に対して生成する例示的ハードウェア構成要素を示すブロック図である。
【図1B】反復的な領域再定義工程を実行する例示的ハードウェア構成要素を示すブロック図である。
【図2A】例示的なLC/MS画像(構成画像)を示す図である。
【図2B】例示的なLC/MS画像(構成画像)を示す図である。
【図2C】例示的なLC/MS画像(構成画像)を示す図である。
【図2D】例示的な合成画像を示す図である。
【図3A】構成画像のスニペットおよび例示的なマイクロアライン後のスニペットを示す図である。
【図3B】構成画像のスニペットおよび例示的なマイクロアライン後のスニペットを示す図である。
【図3C】例示的な合成スニペットを示す図である。
【図4A】分割後の例示的合成スニペットを示す図である。
【図4B】構成画像の例示的な分割を示す図である。
【図4C】構成画像の例示的な分割を示す図である。
【図4D】構成画像の例示的な分割を示す図である。
【図5A】例示的な構成画像を示す図である。
【図5B】例示的な構成画像を示す図である。
【図5C】例示的な構成画像を示す図である。
【図5D】例示的な構成画像を示す図である。
【図5E】合成画像から導出された例示的なピークマスクを示す図である。
【図5F】事前に形成されたピークマスクを使用した例示的なピークの識別を示す図である。
【図5G】例示的なピークマスクで識別された合成画像の例示的スニペットを示す図である。
【図5H】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5I】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5J】例示的なピークマスクが重ねられた個々の各種構成画像の例示的スニペットを示す図である。
【図5K】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【0012】
【図5L】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【図5M】各種の構成画像の例示的なマイクロアライン後のスニペットを示す図である。
【図5N】例示的なマイクロアライン後の合成スニペットを示す図である。
【図5O】例示的なマイクロアライン後の合成スニペットを示す図である。
【図5P】例示的なマイクロアライン後の合成スニペットから形成された例示的なピークマスクを示す図である。
【図5Q】例示的なピークマスクを使用して、マイクロアラインされた合成スニペットから切り出されたさらなる例示的スニペットを示す図である。
【図5R】例示的スニペットのさらなる分割を示す図である。
【図5S】例示的なピークマスクを示す図である。
【図5T】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図5U】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図5V】個々の各種構成画像の例示的スニペット上の例示的ピークを示す図である。
【図6A】例示的な構成画像を示す図である。
【図6B】例示的な構成画像を示す図である。
【図6C】例示的な構成画像を示す図である。
【図6D】例示的なピークマスクを示す図である。
【図6E】例示的なピークマスクを示す図である。
【図6F】例示的なピークマスクを示す図である。
【図6G】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6H】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6I】構成画像を使用せずにピークマスク間に識別された関係を示す図である。
【図6J】ピークマスクの行列を示す図である。
【図6K】本発明の主題の一実施形態に係る共通ピークマスクの選択を示す図である。
【図6L】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6M】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6N】各種のピークマスクで検出された各種構成画像からのピークを示す図である。
【図6O】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図6P】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図6Q】本発明の主題の一実施形態に係り、各種の共通ピークマスクで検出された各種構成画像からのピークを示す図である。
【図7A】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7B】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7C】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7D】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7E】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7F】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7G】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7H】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7I】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7J】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7K】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7L】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7M】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図7N】対象領域を反復的に再定義して生物学的特徴を発見する方法を説明する工程図である。
【図8】開示される方法を実装するのに適した代表的なコンピューティング環境を示すブロック図である。
【発明を実施するための形態】
【0013】
本出願および特許請求の範囲で使用される場合、単数形の「a」、「an」および「the」は、当該文脈が明確に指定しない限り複数形を含む。また、用語「〜を含む(includes)」は、「〜を備える(comprises)」を意味する。さらに、用語「結合された(coupled)」は、結合された物の間にある中間要素の存在を排除しない。
【0014】
本明細書に記載されるシステム、装置、および方法は、決して制限的なものと解釈されるべきではない。本開示は、単独での、ならびに相互と各種コンビネーションおよびサブコンビネーションされた、開示される各種実施形態の新規かつ非自明なすべての特徴および態様を対象とする。ここに開示されるシステム、方法、および装置は、それらの特定の態様または特徴または組み合わせに制限されず、また、開示されるシステム、方法、および装置は、1つまたは複数の特定の利益が存在すること、あるいは問題が解決されることを必要とするものでもない。動作理論はいずれも説明を容易にするためであるが、ここに開示されるシステム、方法、および装置は、それらの動作理論に制限されない。
【0015】
開示される方法の一部は、説明上の利便性のために動作を特定の連続した順序で説明するが、以下で述べる特定の文言で特定の順序付けが必要とされない限り、そのような方式の説明は順序の入れ替えを包含することを理解されたい。たとえば、順番に説明される動作は、場合によっては、順序を入れ替える、あるいは同時に行われてよい。さらに、図を簡潔にするために、添付図面は、開示されるシステム、方法、および装置が他のシステム、方法、および装置と併せて使用されることが可能な各種方式を示さない場合がある。また、説明では、開示される方法を説明するために「生成する(produce)」や「提供する(provide)」のような用語を用いる箇所がある。そうした用語は、実際に行われる動作の高水準の抽象化である。それらの用語に対応する実際の動作は特定の実装に応じて異なり、当業者には容易に認識することができる。
【0016】
質量分析は、液体クロマトグラフィ、ゲル電気泳動、ガスクロマトグラフィ、イオン拡散等の他の分離技術と組み合わせられる。そのような技術を組み合わせることで得られたデータは、n次元のデータセットとして表されることができる。たとえば、クロマトグラフィの保持時間と質量スペクトルの質量対電荷比が、第1および第2の軸からなる座標として使用されることができる。その座標に関連付けられた信号強度がデータ値の2次元配列として表されることができ、そのようなデータは、画像または画像データと呼ぶことができる。
【0017】
質量分析と液体クロマトグラフィは、生物サンプルの評価に適用されることが可能な2つの重要な分離技術であり、以下の説明ではLC/MSデータセット(本明細書では画像または画像データと呼ぶ)が使用されるが、他の種類のデータが使用されてよい。典型的な生物試料には、蛋白質、炭水化物、脂質、および代謝産物の混合物があるが、他の化学または生物試料が同様に調査されることができ、ここに開示される方法および装置は非生物試料にも適用されることができる。
【0018】
開示される方法および装置の例の一部は、薬剤研究に関連する。薬学医療研究はしばしば、病態や投薬を用いた治療に対する反応等の生理的状態の指標である生物化学物質を特定することを目指す。そのような化学物質の1つまたは複数からなるセットは、バイオマーカと呼ばれる。バイオマーカを使用して、病態あるいは他の生理的状態を診断することができる。バイオマーカは、研究所で臨床エンドポイントの代用として使用されることができ、そのようなバイオマーカは、代理エンドポイントと呼ばれる。代理エンドポイントを使用すると、被験者、さらには被験動物を要することなく医薬品を開発することができる。薬の開発は、試験管で代理エンドポイントの存在を検査することによって開始することができる。
【0019】
一般的なシナリオは、生検試料、血液、唾液、羊水等の生物試料を、その試料に関連する複合化学混合物が液体クロマトグラフィ/質量分析機器に取り込まれるように処理するものである。そして、その処理の結果得られたデータ(保持時間およびm/z比に応じた信号強度)が使用されて、その複合混合物中の生化学物質を同定する。ここに開示される方法および装置は、データの一部のみを選択することにより、生物化学的に関連性がより高いデータを識別することを可能にする。具体的には、本方法および装置は、典型的には対象の信号に混入する可能性があるノイズまたは他の外部信号から対象とする信号部分を分離または抽出することにより、LC/MSのデータセットから、向上した信号対雑音比を有する1つまたは複数の化学物質の対象信号を特定することを可能にする。1つまたは複数の成分(moiety)に関連する信号部分を除去または部分的に除去することにより、さらに他の信号特徴の調査を可能にすることができる。たとえば、他のピークがより明瞭に示されるように、特定の成分に関連するピークを除去することができる。
【0020】
本明細書に開示される要領で分析データを処理すると、複合混合物中の化学物質の優れた分離および同定と、より好適な定量化が得られる。研究者は、健常被験者と罹患被験者および/または未治療被験者と既治療の被験者についてこの分析工程を繰り返すことができる。そのようにして同定された健常被験者と罹患被験者間、または未治療被験者と既治療被験者間での化学物質成分の違いに基づいて、バイオマーカが定義されることができる。場合によっては、そのバイオマーカは、臨床エンドポイントの代用として用いる代理エンドポイントの役割を果たすことができる。そのようなバイオマーカは、薬の開発で診断および治療の指標として使用することができる。
【0021】
本明細書では、液体クロマトグラフィ(LC)および質量分析(MS)に基づく画像に関して代表的な実施形態を説明する。通例は、LCの保持時間とMSの質量対電荷比(m/z)の関数として信号強度が記録され、この記録された信号強度は、画像データ配列として記憶または処理されることができる。本明細書では、便宜上、保持時間は一般に水平線(x軸)に沿って配置され、m/zは垂直線(y軸)に沿って配置される。他の例では、LC保持時間またはm/z比の代わりに、またはそれらに加えて、他の種類のデータが使用される。たとえば、ガスクロマトグラフィ(GC)、イオン分光、ゲル電気泳動、イオン拡散、あるいは質量分析の飛行時間データを使用することができる。
【0022】
以下の例では、生物サンプルの評価に関連する分析結果が、複製と呼ばれるデジタル画像として取り込まれる。強度の変化は、複製全体にわたって分散される。上記で述べたように、従来の評価技術は、複製間の様々な強度の変化間の対応関係を識別することができない。いわゆる「タイムワーピング」を使用してそのような強度の変化を位置合わせすることにより、ノイズである変化をより適切に特定し、ノイズではない強度変化を明らかにすることができるが、いくつかの強度変化を位置合わせすると、結果として他の強度変化の位置がずれてしまい、それらの強度変化の一部は重要な特徴である可能性もある。
【0023】
図1Aは、生物サンプルを処理して生物学的特徴を検出するシステム100を示す。科学実験では、各生物サンプルは、同じ実験(治療条件)または異なる実験(治療条件)にかけられ、その結果、調製済み生物サンプル102が得られる。その調製済み生物サンプル102は、たとえば、各種の液体クロマトグラフィおよび質量分析処理を適用するLC/MS機器104でさらに処理される。その結果は、1つまたは複数のLC/MS画像または構成画像であり、それらの画像は、ハードウェアおよび/または1つまたは複数のコンピューティングデバイスで実行されるソフトウェアを含む反復領域プロセッサ105でさらに処理される。反復領域プロセッサ105から提供される処理後の領域は、ハードウェアおよび/または1つまたは複数のコンピューティングデバイスで実行されるソフトウェアを含む対象領域プロセッサ106でさらに処理される。幾何学的形状および相関に基づく各種スコアにより、システム100は、調製済み生物サンプル102から抽出された生物学的特徴を分類して、1つまたは複数の対象とする生物学的特徴110を識別することができる。
【0024】
図1Bは、反復領域プロセッサ105の多くの部分の中の一部分112をより詳細に図示する。部分112は、一実施形態では合成画像内で、また別の実施形態では合成画像を使用せずに、ピーク検出を精密化するのを助ける。部分112は、ピーク等の対象領域を識別し、また複数の画像からの情報を使用して、複数の画像上で適切に再現可能なピークの範囲を包囲するようにピークの境界エリアを再定義する。画像の集まりにある各画像は、LC/MS(液体クロマトグラフィ/質量分析)画像、または複製、または構成画像、またはLC/MSの実行(run)として参照されることができる。ピークは、1つまたは複数の画像上に適切に表される。しかし、境界エリアは、そのピークをとらえるために各画像上で異なってよい。各境界エリアは、大きさと位置が異なってよい。境界エリアの中には、たとえば不適当な分割技術のために誤って境界エリアの中に取り込まれた可能性のあるアーチファクトを含んでいるものがある。一部の構成画像では、境界エリアがまったく欠落している場合もある。異なる画像の境界エリアをより好適に比較するのを助けるために、境界エリアは、異なる画像間で適切にほぼ同じ大きさにすべきである。それにより、当該の対象領域が代表境界エリアに局所化され、その境界エリアを使用して複数の画像についての異なる境界エリアの代わりとすることができる。この代表境界エリアは、求めようとする各種画像のピークを明らかにするツールに相当する。
【0025】
反復領域プロセッサ110の部分は、リコンシリエータ(reconciliator)114を含む。リコンシリエータ114は、複数の構成画像上の溶出種を識別する。すなわち、1つまたは複数の構成画像が、対象の溶出種とともに、多くの場合は対象の溶出種の非常に近くにある異なる形で溶出された多くの種を含んでいる可能性がある。難しいのは、ある構成画像上の1つのピークを、まったく同じ溶出種を表す他の構成画像上の他のピークに関連付けることである。リコンシリエータ114は、この識別を助ける。当業者には理解されるように、適切な実装の1つはピーク再構築技術の使用である。そのような技術により、通例マクロアラインでは重ね合わせることができない複数の画像からのピークを相関付けることが可能になる。他の適切な技術が可能である。この構成画像を使用して、一実施形態では、合成画像を形成するための構成画像の平均化や最大投射等の適切な技術により、合成画像を生成することができる。合成画像上のスポットの形状や強度などの変化が、特徴の境界線を決定する。スポットは、構成画像中で連続した1つの範囲を構成する強度ピークである。多重化された構成画像が合成画像を形成する。そのような画像中では、構成画像にあるピークが重なり合う、あるいは他の構成画像のピークと近接している場合がある。そのようにして対応し合うピークは、同じ化学物質から生じたものと推定される。異なる構成画像にある対応し合うピークは、行われる可能性のあるマクロアラインの後であっても、溶出時間の違いのために合成画像上で重なり合うか、互いに近接している。別の実施形態では、合成画像を用いずに、構成画像を使用して分析が行われる。
【0026】
部分112は、マイクロアライナ(microaligner)116を含む。マイクロアライナ116は、保持時間の次元で位置合わせを行って、液体クロマトグラフィ工程に伴う不確定性や不十分な較正を克服する。一実施形態では、マイクロアライナ116は、保持時間の次元で、対象とする一領域の画素を、他の構成画像上の同じ仮想対象領域にある画素と位置合わせする。構成画像のその他の部分と構成画像上の他の対象領域は、考慮されず、それらの対象領域部分が同じ保持時間を有する場合でも影響されない。このように一度に1つの対象領域に注目することにより、従来のタイムワーピングでは不可能な位置合わせが可能になる。
【0027】
マイクロアライナ116は、以前に検出された対象領域から境界線が導出されている構成画像中の対象領域を位置合わせする。この検出は一実施形態では合成画像を使用して行われている可能性があるが、別の実施形態では合成画像を使う必要はない。構成画像中の対象領域をマイクロアラインすることにより、生物学的特徴またはその欠如等の手がかりを明らかにする、ピークの相関付けと領域のスコア付けを助けることができる。部分112等によりマイクロアライン後に対象領域の境界線を再定義すると、対象領域を絞り込んで元の対象領域の一部であったノイズを排除することにより、対象領域中のノイズを低減、除去、または最小に抑えるのを助けることができる。
【0028】
マイクロアライナ116は、合成画像がなくとも対照領域の位置合わせを精密化することができる。本例では、各種の構成画像上の対象領域のマクロアラインされた境界エリアが重なり合うか、互いと近接している場合、それらの領域は相互に関係付けられ、同じ化学種にあったものと推定される。そのような対象領域は、それらの構成画像上で互いに対応している。そして、マイクロアライナ116は、互いに対応する対象領域のセットを位置合わせする。マイクロアラインにおける合成画像の使用法の1つは、複数の構成画像にある対象領域を関連付けるものである。この使用法では、合成画像で共通の対象領域を識別し、その共通の対象領域が、各構成画像の保持時間の違いを考慮してすべての構成画像に適用されることができる。互いに対応する対象領域のセットが合成画像を用いずに識別できる場合は、それらの対応対象領域のセットはマイクロアラインすることができる。
【0029】
反復領域プロセッサ106は、領域リデファイナ118を含む。各種の構成画像中で対象領域をとらえるための境界線が異なるため、それらの対象領域は、対象としないアーチファクトを含む可能性がある。そのようなアーチファクトは、周囲の背景や隣接する混入物等のノイズであり、対象画素を含む信号と対比される。合成スニペット(snippet:断片)を作成することにより、対象とする画素をより多く含み、ノイズ等の対象としない画素をより少なく含むように、元の対象領域を再定義することができる。ノイズが少ないほど、信号がより好適に識別され、科学的発見につながる生物学的な手がかりを明らかにするためのより良好なスコア付けが可能になる。領域リデファイナ118は、対象の生物学的特徴を示す同じ手がかりをそのすべてが指す構成画像にわたってピークの境界エリアに変更を加える。その結果、共通の境界エリアが得られ、この境界エリアは、ピークの評価と比較のための統計モデルを改良することによってピークの定量化を容易にする効果がある。
【0030】
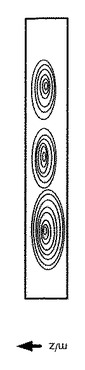
図2Dに、図2A〜2Cに示す構成画像から形成された合成画像を図示する。構成画像を組み合わせて合成画像を形成するには、平均化や最大投射等の各種の適切な技術がある。適切には、平均化を使用して信号対雑音比を向上させる。分割工程が適用されて、ピークを含む可能性の高い細分エリアを得る。図に示すピークは、入れ子状の一連の楕円として表している。内側の楕円は、より高い信号強度を意味し、したがって楕円による表現は地形図に似る。強度の最大値は、最も小さい楕円の中に位置する。楕円の間隔は、一定の信号強度の刻み幅に対応している。次いで、ピーク再構築等の適切な関連付け工程が実行されて、個々の種を反映している可能性の高い境界エリアによって位置が同定された要素を得る。図2Dではこの境界エリアは長方形の枠として表しているが、境界エリアは、楕円、円、矩形、長円、多角形、あるいは他の正則または非正則の連続形状であってよい。図2A〜2Cを参照すると、境界エリアは、構成画像上に投影されることができ、1つの構成画像中で1つの境界エリアで囲まれたピークは別の構成画像中の同じ境界エリアで囲まれている別のピークと関連付けられているとみなすという意味で、対応し合う境界エリアによって囲まれた情報は照合されたとみなされる。
【0031】
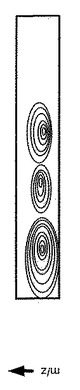
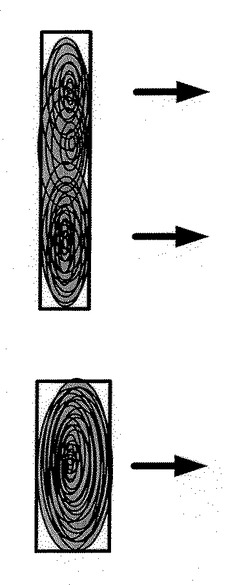
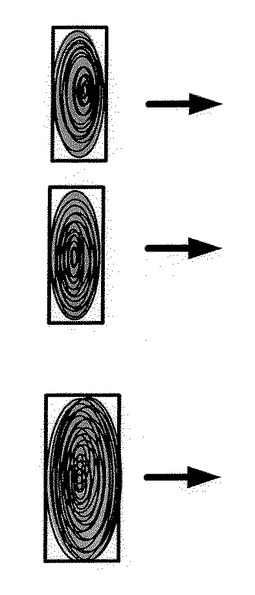
図3Aに、図2A〜2Cに見られる構成画像のスニペットを示す。理解できるように、これらのスニペットはマイクロアラインされていない。これらの図面中のピークは、上記のように一連の楕円として視覚的に表されている。一番上のスニペット中のピークは、右に寄っている。中央のスニペット中のピークは左に寄っており、一番下のスニペット中のピークは左に向かっている。マイクロアライン工程を開始するために、同じ大きさの境界エリアがこれらのスニペットに適用される。図3Aを参照されたい。次いで、マスタスニペットが選択され(この例では一番上のスニペット)、そのマスタスニペットに合わせて他のスニペット(中央のスニペットおよび一番下のスニペット)がマイクロアラインされることになる。図3Bには中央のスニペットと一番下のスニペットが左に移動された様子を示す。異なる長さの2つの矢印は、マスタスニペット(一番上のスニペット)とのマイクロアラインを達成するために移動が行われた程度を示している。図3Cは、図3Bに示すマイクロアライン後のスニペットから形成された合成スニペットを示す。
【0032】
図4Aは、マイクロアラインされたスニペットから形成された合成スニペットを示し、この合成スニペットは、互いに隣接している2つのピークを識別するための画像分割を施されている。分割工程は、対象領域を再定義する隣接する境界エリアを明らかにする。境界エリアは矩形の枠として表しているが、他の形状が使用されてよい。図4B〜4Dは、マイクロアラインされ、合成され、分割された画像から識別された境界エリアを構成画像に適用した様子を示す。この適用により、対象ピークの境界線を再定義する。
【0033】
図5A〜5Cに、構成画像上のピークを図示する。これらのピークは互いに関連付けられていない。そのため、これらのピークの一部が、対象とする生物学的特徴を明らかにする同じ手がかりを指しているかどうかについては結論を出すことができない。ピークは、他の楕円を含む楕円として視覚的に表現されている。各内側の楕円は、地形図のようにより高い強度を視覚的に示し、したがって、他のより大きな楕円の中に含まれる最も小さい楕円が強度最大値の頂点を含んでいる。図5A〜5Cの構成画像はマクロアラインされたと想定することができるが、そのマクロアラインは、残った局所的な位置ずれが残っているため不完全と思われる。
【0034】
図5Dに、図5A〜5Cの構成画像の多重化から形成された合成画像を示す。図5Eは、図5Dの合成画像に分割工程を実行することから形成された2つのスポットを示す。この2つのスポット(上のマスクと下のマスク)は、本発明の主題の各種実施形態に従ってさらに領域再定義で処理すべき情報を識別する境界エリアを有する。図5Fを参照されたい。図5Gは、細長く、図5Fでスポット1と呼んでいる合成画像中の情報を識別する下のマスクの選択を示している。このマスクの境界エリアを使用して、マスクの境界エリアを構成画像に適用してスニペットを形成することにより、さらなる情報が識別される。図5H〜5Jを参照されたい。
【0035】
次いでスニペットがマイクロアラインされる。図5K〜5Mを参照されたい。図5K〜5Mでは、スニペットに含まれるピークをマイクロアラインするために、スニペットは位置が不揃いになっている。図5Nは、図5K〜5Mのマイクロアラインされたスニペットから形成された合成スニペットを示す。図5Oは、以下の図面の説明を容易にするための合成スニペットの表現である。図5Pは、2つのマスクを形成するための合成スニペットの分割を示す。図5Qは、2つのマスクの境界エリアを使用して、合成スニペットの2つの対象領域を区別する様子を示す。上記の工程が繰り返された結果、図5Rは3つの別個のピークの識別を示す。図5Sは、それら別個のピークから形成されたマスクを示す。このマスクが元の構成画像に適用されて、互いに関連付けられたピークを明らかにし、したがって対象とする生物学的特徴の手がかりを明らかにする。図5Sのマスクは、図5T〜5V各々の下の3つのピークに適用される。上のスポットのためのマスクは、図5Fのスポット2から導出される。図5T〜5Vは、構成画像間で対応し合うピークを領域的に再定義した後である。図5T〜5V間で対応するピークは、502A〜502C、504A〜504C、506A〜506C、および508A〜508Cである。
【0036】
図6A〜6Cは、構成画像上のピークを示す。これらのピークは互いに関連付けられていない。したがって、これらのピークの一部が、対象とする生物学的特徴を明らかにする同じ手がかりを指しているかどうかについては結論を出すことができない。ピークは、他の楕円を含む楕円として表されている。上記のように、各内側の楕円は、地形図のようにより高い強度を視覚的に示す。図6D〜6Fは、図6A〜6Cの構成画像に実行された分割工程の結果得られたスポットのマスクである。図6G〜6Iはそのスポットマスクを示すが、互いに関係を持つマスクは、構成画像間を横断する線で視覚的に結ばれている。
【0037】
図6Jは、列と行からなる行列を示す。各列と各行の交差点にスポットマスクが格納される。各列は、恐らくは同じ生物学的手がかりまたは生物種を指すピークを明らかにする、互いに関係のあるスポットマスクを指す。各行は、同じ構成画像上にあるスポットマスクを指す。たとえば、1番目の行は、第1の構成画像(図6A)から得られたスポットマスクを指し、2番目の行は、第2の構成画像(図6B)から得られたスポットマスクを指し、3番目の行は、第3の構成画像(図6C)から得られたスポットマスクを指す。図6Kは、複数の列と1つの行を有する別の行列を示す。この1つの行は、異なる生物学的手がかりまたは化学種に対応するピークに関連付けられた共通スポットマスクを表す。一実施形態では、共通スポットマスクは、図6Jの行列の列にあるすべてのスポットマスクの中で最も大きいものである。別の実施形態では、図6Jの行列の各列のスポットマスクの和集合が、その列の共通スポットマスクとなる。第3の実施形態では、共通スポットマスクは、図6Jの行列の同じ列のスポットマスクの和集合に収まる最も大きな楕円である。関係のあるピークは、それぞれ図6L〜6Nの構成画像に示すように、ピーク602A〜602C、604A〜604C、606A〜606C、および608A〜608Cである。図6O〜6Qは、図6Kの行列の共通スポットマスクに従って関係付けられ、識別され、境界が定められたピークを含む構成画像を示す。
【0038】
集約されたピークマスクは、クッキーの抜き型方式で構成画像上に配置される。配置の位置は、マクロアラインとマイクロアラインを考慮に入れる。図5の例では、図5T〜5Vが、この工程の結果である、領域的に再定義されたピーク検出を表す。図6の例では、図6L〜6Qが、この工程の結果である、領域的に再定義されたピーク検出を表し、図6では中間のマイクロアライン合成画像は生成されていない。
【0039】
図7A〜7Nは、対象領域を反復的に再定義して生物学的特徴を発見する方法7000を説明する。開始ブロックから、方法7000は、継続端子(「端子A」)と終了端子(「端子B」)の間に定義された方法ステップのセット7002に進む。方法ステップのセット7002は、調製された生物サンプルからデータが導出される照合ステップのセットの実行について記述する。照合ステップでは、異なる構成画像にあるピークを関連付ける。図7B〜7Dを参照されたい。そのような構成画像が図5A〜5Cに例示される。これらの構成画像はマクロアラインされていると想定することができるが、そのマクロアラインは、局所的なずれが残っているために不完全である。図5Dに示すような合成画像の照合工程に関して、合成画像に行われる画像分割により、図5Eに示すようなピークのセットを生成する。望ましい結果では、1つのピークで単一の化学種が表され、各ピークは1つのみの科学種を表す。ただし、過分割あるいはピークの併合が発生する可能性がある。過分割は、実際には同じ単一の種を表している可能性のある複数のピークを生じさせる可能性がある。そのような過分割されたピークは、再構築して単一のピークに戻す必要がある。過分割されたピークを再構築するために、ピーク再構築工程を実行するピークリアセンブラ(reassembler)が適当に使用されてよい。逆に、図5A〜5Cに例示するような構成画像間のずれは、1つの合成画像上で異なる科学種を指すピークの併合を引き起こす可能性がある。この状況を図5E〜5Fに示すが、図5Fでスポット1と呼んでいるピークの凝集が図5A〜5Cの多重化の結果発生している。こうした場合は、マイクロアラインを行い、その後分割を行うことによって、種の分離が達成される。合成画像を用いない場合の構成画像のセットの照合工程に関して、各個々の構成画像単独に画像分割が実行されて、各個々の構成画像についてのピークのリストを作成する。本方法は次いで、他の構成画像のピークが同じ種を指している場合は、構成画像上のピークをそれら他の構成画像のピークに関連付ける。
【0040】
端子A(図7B)から、方法7000はブロック7008に進み、LC/MS処理を実行してLC/MS画像(構成画像)のセットを生成する。ブロック7010で、方法は任意でタイムワープアルゴリズム等のマクロアライン工程を実行して、構成画像のセットの位置合わせをする。そのような構成画像を図5A〜5Cに図で例示する。これらの構成画像はすでにマクロアラインされたと想定することができるが、そのマクロアラインは、局所化されたずれが残っているため不完全と思われる。方法は次いで判定ブロック7012に進み、検査が行われて、本方法が領域再定義のための入力として構成画像のみを使用しているかどうかを判定する。この検査の答がNoである場合、方法は別の継続端子(「端子A1」)に進む。(すなわち、方法は、ピークマスクを判定するために構成画像を使用する代わりに合成画像の使用を選択する。)そうでなく(その場合、方法は構成画像に基づく合成画像ではなく構成画像のみを使用することを選択する)、この検査の答がYesである場合は、方法7000はブロック7014に進み、ピーク検出を使用して各構成画像のピークリストを形成することにより、構成画像中の対象領域を識別する。ブロック7016で、方法は、構成画像R1上のピークP1が、残りの構成画像R2,..,RN上の同じ種Pを識別する他のピークと関連付けられるようにすべてのピークを検討する。方法は次いで終了端子Bに入る。
【0041】
端子A1(図7C)の後、構成画像のセットから合成画像が形成される。ブロック7018を参照されたい。そのような合成画像を図5Dに図で例示する。方法7000は次いで、合成画像中の変化を検出(ピーク検出等)することにより、合成画像中の対象領域を識別する。ブロック7020を参照されたい。ピーク検出の結果、ピークの位置および境界を定義するピークマスクが得られる。図5Eは、図5Dに例示する合成画像から導出することが可能な例示的なピークマスクの図表現である。ブロック7022で、方法は、ピークマスクの集まりを作成する。初めは、すべてのピークは、集約されていないものとみなされる。次いで、方法は別の継続端子(「端子A2」)に進む。端子A2から、方法は判定ブロック7024に進み、検査が行われて、すべてのピークマスクが集約したかどうかを判定する。判定ブロック7024でこの検査の答がYesである場合、方法は別の継続端子(「端子E3」)に進み、実行を終了する。そうでなく、判定ブロック7024における検査の答がNoである場合は、方法はブロック7026に進み、ピークマスクの集まりから未集約のピークマスクを選択する。方法は次いで別の継続端子(「端子A3」)に入る。
【0042】
端子A3(図7D)から、方法は、ブロック7026で選択されたピークマスクを含んでいる合成画像中の対象領域を識別する。この対象領域を元の対象領域と呼ぶ。ブロック7028を参照されたい。図5Gは、そのような元の対象領域を図の形で例示している。ブロック7030で、方法は、境界および位置が合成画像中の元の対象領域に関係する、構成画像中の対象領域を識別する。各構成画像上の対象領域は、合成画像によって決定され、次いで各構成画像のマクロアラインを考慮して構成画像上にクッキーの抜き型方式で投影される。図5H〜5Jは、図5Gに例示される元の対象領域を使用して識別された各構成画像の個々の対象領域を例示する。方法は、合成画像中の(保持時間の次元における)元の対象領域の幅を測定する。ブロック7032を参照されたい。方法はさらに、識別された各対象領域の幅を、測定された幅だけ保持時間次元で前後に延長して、結果として3倍に増加させる。ブロック7036を参照されたい。ブロック7038で、方法は、識別された各対象領域の高さを任意で減らして、許容差だけ変更された中央質量/電荷におけるクロマトグラムに注目する。要するに、上記のステップは、各構成画像中の画像スニペットを識別して画像スニペットの集まりを得るための未集約の合成ピークマスクの使用を記述している。
【0043】
端子B(図7A)から、方法7000は、継続端子(「端子C」)と終了端子(「端子D」)の間に定義された方法ステップのセット7004に進む。方法ステップのセット7004では、対象領域を位置合わせするマイクロアライン工程を実行する。端子C(図7E)から、方法7000は判定ブロック7042に進み、検査が行われて、合成画像との位置合わせによって構成画像からマスタスニペットが決定されるかどうかを判定する。判定ブロック7024における検査の答がNOである場合、方法7000は、ブロック7044に進み、無作為選択を含む他の手段により構成スニペットと合成スニペットの中から適切なマスタスニペットが選択される。方法は次いで、別の継続端子(「端子C7」)に進む。一方判定ブロック7042の検査に対して答がYESである場合は、方法は別の継続端子(「端子C2」)に進む。
【0044】
端子C2(図7E)から、方法7000はブロック7046に進み、構成画像のサブセットの中から、元の対象領域と相関関係がある対象領域を(マスタスニペット候補として)見つけることを開始する。ブロック7048で、元の対象領域は行列U=uijであり、マスタスニペット候補は、V=vikと定義される。変数kは、j−n,...,j+nの範囲を有し、nは元の対象領域の幅(単位:画素)である。ブロック7048を参照されたい。変数iは、質量/比の次元で1からmの範囲をとる。ブロック7050を参照されたい。変数jは、保持時間の次元に沿って1からnの範囲をとる。ブロック7050を参照されたい。ブロック7052で、v(q)は、マスタスニペット候補から導出されるベクトルである。変数qは、保持時間のシフトを表し、−n,...,nの範囲である。ブロック7052を参照されたい。方法7000は次いで別の継続端子(「端子C3」)に進む。
【0045】
端子C3(図7F)から、方法は、正規化された相互相関最大値t1(q)の計算の準備をする。ブロック7054を参照されたい。ブロック7056で方法は次の項
【0046】
【数1】
【0047】
を計算する。
【0048】
項
【0049】
【数2】
【0050】
は、上記の数学演算の結果である。ブロック7058で、方法はさらに次の項
【0051】
【数3】
【0052】
を計算する。
【0053】
その結果得られる
【0054】
【数4】
【0055】
が、その数学演算の結果である。方法7000はブロック7060に進み、次の式からt1(q)を計算する。
【0056】
【数5】
【0057】
方法7000は別の継続端子(「端子C4」)に進む。端子C4(図7F)から、方法はブロック7062に進み、被除数と除数の商である線形相関係数最大値t2(q)の計算を準備する。ブロック7064で、被除数が次のように計算される。
【0058】
【数6】
【0059】
ブロック7066で除数が次のように計算される。
【0060】
【数7】
【0061】
方法7000は次いで別の継続端子(「端子C5」)に進む。端子C5(図7G)から、方法は、正規化された最小二乗差最小値t3(q)の計算を準備する。ブロック7068を参照されたい。方法は次の式を計算する。
【0062】
【数8】
【0063】
ブロック7070を参照されたい。方法は次いで別の継続端子(「端子C6」)に進む。端子C6(図7G)から、方法はブロック7072に進み、正規化された相互相関最大値、線形相関係数最大値、および正規化された最小二乗差最小値の中から対象領域のスコアが選択される。方法7000は判定ブロック7074に進み、検査が行われて、すべての構成画像がその対象領域について評価されたかどうかを判定する。判定ブロック7074における検査の答がNOである場合、方法は端子C2に進み、ブロック7046にループバックして上記の処理ステップが繰り返される。そうでなく、判定ブロック7074における検査の答がYESである場合は、方法はブロック7076に進み、合成画像中の元の対象領域と最も高く相関するスコアを有する対象領域が、マイクロアラインの際のマスタスニペットとして選択される。方法は次いで別の継続端子(「端子C7」)に進む。
【0064】
端子C7(図7H)から、方法は、マスタスニペットとマイクロアラインされる対象領域(画像スニペット)を、サブセット中の構成画像内から選択する。ブロック7078を参照されたい。マスタスニペットは行列U=uijであり、マイクロアラインする画像スニペットはV=vikと定義される。ブロック7080を参照されたい。さらに、nは元の対象領域の幅(単位:画素)であり、iは質量/電荷の次元において1からmの範囲をとり、jは保持時間の次元に沿って1からnの範囲をとり、kは保持時間の次元に沿ってj−nからj+nの範囲をとる。ブロック7082、7084を参照されたい。−m,...,nの範囲をとるqだけ(保持時間次元で)kをシフトすることにより、画像スニペットvikからv(q)が導出される。ブロック7086を参照されたい。k−q≠jであるために一致しない画素をすべて除き、マスタスニペットijとのv(q)の強度の適切な相関に基づいてqが計算される。ブロック7088を参照されたい。位置合わせのタイミングを決める各種方式を使用してよい。以下に述べるのはいくつかの方式の例である。qの値の1つは、端子C3とC4の間で説明した正規化された相互相関最大値を使用してt1(q)が最大化されるように計算される。ブロック7090を参照されたい。方法7000は、別の継続端子(「端子C11」)に進む。
【0065】
端子C11(図7I)から、端子C4とC5の間で説明した線形相関係数最大値を使用して、t2(q)が最大化されるようにqの別の値が計算される。ブロック7092を参照されたい。端子C5とC6の間で説明した正規化された最小二乗差最小値を使用して、t3(q)が最小化されるようにqのさらに別の値が計算される。ブロック7094を参照されたい。方法7000は次いで別の継続端子(「端子C8」)に進む。端子C8(図7J)から、方法は判定ブロック7096に進み、検査が行われて、適切なマイクロアラインを識別する相関があるかどうかを判定する。判定ブロック7096の検査の答がYESである場合、マスタスニペットとの間に適切な相関を提供する、シフトされた画像スニペットが、さらなる処理のために保持される。ブロック7098を参照されたい。方法は次いで別の継続端子(「端子C9」)に進む。判定ブロック7096における検査の答がNOの場合、方法は別の判定ブロック7100に進み、検査が行われて質量中心による位置合わせを使用すべきかどうかを判定する。判定ブロック7100における検査の答がYESである場合、方法は、画像スニペットの最大値すなわち質量中心がマスタスニペットの最大値すなわち質量中心と一致するように、画像スニペットの保持時間をずらす。ブロック7102を参照されたい。方法は次いで端子C9に進む。判定ブロック7100における検査の答がNOの場合、方法は別の継続端子(「端子C10」)に進む。
【0066】
端子C10(図7K)から、方法は判定ブロック7104に進み、検査が行われて、適応型位置合わせ等の別の位置合わせ方法を使用すべきかどうかを判定する。判定ブロック7104における検査の答がYESの場合、方法は、別の形式の位置合わせを実行して画像スニペットをマスタスニペットとマイクロアラインする。ブロック7106を参照されたい。方法は次いで端子C9に進む。判定ブロック7104における検査の答がNOの場合、方法は端子C9に進み、さらに判定ブロック7108に進み、検査が行われてマイクロアラインすべき別の対象領域があるかどうかを判定する。判定ブロック7108における検査の答がYESの場合、方法は端子C7に進み、ブロック7082にループバックして、上記で述べた処理ステップが繰り返される。そうでなく判定ブロック7108の検査の答がNOの場合は、方法は終了端子Dに進む。図5K〜5Mは、図5H〜5Jに例示した画像スニペットを前提にマイクロアラインされた対象領域の図示例である。
【0067】
端子D(図7A)から、方法7000は、継続端子(「端子E」)と終了端子(「端子F」)の間に定義された方法ステップのセット7006に進む。方法ステップのセット7006では、より良好な信号対雑音比をとらえ、かつその後のスコア付け工程と科学的評価に適した境界エリアに注目するための境界再定義工程を実行する。端子E(図7L)から、方法は判定ブロック7110に進み、検査が行われて、方法がマイクロアラインされた合成画像を入力として使用しているかどうかを判定する。判定ブロック7110における検査の答がNOの場合、方法は継続端子(「端子E2」)に進む。そうでなく判定ブロック7110における検査の答がYESの場合、方法は、(合成画像中の元の対象領域とは異なる)合成スニペットを作成するステップを実行する。ブロック7112を参照されたい。図5K〜5Mは、方法ステップ7004のマイクロアライン工程の結果得られたマイクロアラインされた対象領域の図示例である。図5Nは、それらのマイクロアライン対象領域から導出された合成スニペットの図示例である。
【0068】
ブロック7114で、合成スニペットは、各種構成画像R1,...,RNにある各ピークPの2次元表現からなる。方法は任意で平滑化ステップを実行して異常ノイズを除去する。ブロック7116を参照されたい。ブロック7118で、方法は、閾値設定、流域アルゴリズム、ガウスの重畳のラプラシアンによる水平および/または放射状エッジ検出等の変化検出(ピーク検出)を実行して、合成スニペット中に新しいピークマスクを識別する。ピーク再構築ステップが実行されて、誤って複数の部分に分割された可能性のあるピークを共にまとめる。ブロック7120を参照されたい。方法は次いで別の継続端子(「端子E1」)に入る。
【0069】
端子E1(図7M)の後、方法は、マイクロアラインされた合成スニペットから新しいピークマスクを作成する。ブロック7122を参照されたい。図5Pは、ピーク検出により図5Oから導出された新しいピークマスクを例示する。方法は判定ブロック7124に進み、検査が行われて、新しいピークマスクが、ブロック7026で選択された集約されていないピークマスクと同じものであるかどうかを判定する。判定ブロック7124における検査の答がNOである場合、方法は、選択された集約されていないピークマスクを除去する。ブロック7126を参照されたい。方法は次いでブロック7128に進み、マイクロアラインされた合成スニペットからの新しいピークマスクを集約されていないピークマスクの集まりに追加する。図5の例では、図5Pと図5Qの両方に示す2つのピークマスクは、最初のマイクロアラインされた合成ピークマスク、すなわち図5Eの下のスポットとは異なっている。この例では、図5Eの下のスポットを表すピークマスクは、集約されていないピークマスクの集まりからは除かれるが、集約されたとは記録されない。図5Pおよび図5Qの両方に示す2つの新しいピークマスクは、未集約のピークマスクの集まりに追加されることになる。方法は次いで端子A2に進み、判定ブロック7024に戻り、上記で述べた処理ステップが繰り返される。そうでなく判定ブロック7124における検査の答がYESの場合、方法はブロック7130に進み、ピークマスクを集約されたピークマスクとして記録する。方法は次いで端子A2に進み、判定ブロック7024に戻って、上記で述べた処理ステップが繰り返される。図5の図示例を想定すると、図5Pに示す2つのピークマスクは、図5Pに示す2つのピークマスクを図5Eから生成した工程と同じ工程により、図5Rおよび図5Sの両方に示す3つのピークマスクに分解される。
【0070】
端子E2(図7N)から、方法はブロック7132に進む。1つの種を表す各ピークPにつき、方法は、構成画像R上のピークPの最初のピーク境界を共通ピーク境界に合わせて変更する。ブロック7134で、方法は、すべての構成画像にわたり、ピークPの境界領域の和集合として共通ピーク境界の大きい方の境界を割り当てる。ブロック7136で、方法は、共通の対象領域、したがって領域の再定義を形成する。この工程を図6J〜6Kに図形態で示す。方法は端子E3を通ってブロック7138に進み、領域的に再定義されたピークマスクが、各構成画像の位置合わせを使用して構成画像に適用される。図5T〜5Vおよび図6L〜6Qは、それぞれ図5および図6の例についての反復処理の結果を示す。方法は次いで端子Fに進み、実行を終了する。
【0071】
図8および以下の説明は、ここに開示される技術が実装されることが可能な例示的なコンピューティング環境の簡単で一般的な説明を提供するものである。必須ではないが、ここに開示される技術は、パーソナルコンピュータ(PC)によって実行されるプログラムモジュール等のコンピュータ実行可能命令の一般的な文脈で説明される。一般に、プログラムモジュールには、特定のタスクを行うか、特定の抽象データ型を実装する、ルーチン、プログラム、オブジェクト、コンポーネント、データ構造等が含まれる。さらに、ここに開示される技術は、ハンドヘルド機器、マルチプロセッサシステム、マイクロプロセッサを使用した、またはプログラム可能な消費者家電製品、ネットワークPC、ミニコンピュータ、メインフレームコンピュータ等を含む、他のコンピュータシステム構成で実装されてもよい。ここに開示される技術は、通信ネットワークを通じて結ばれた遠隔処理機器によってタスクが行われる分散コンピューティング環境で実施されてもよい。分散コンピューティング環境では、プログラムモジュールは、ローカルおよびリモート両方のメモリ記憶装置に配置されることができる。図8を参照すると、ここに開示される技術を実装するための例示的システムは、例示的な従来のPC800の形態の汎用コンピューティングデバイスを含み、PC800は、1つまたは複数の処理装置802、システムメモリ804、およびシステムメモリ804を含む各種システム構成要素を1つまたは複数の処理装置802に結合するシステムバス806を含む。システムバス806は、各種のバスアーキテクチャを使用した、メモリバスまたはメモリコントローラ、ペリフェラルバス、ローカルバスを含む数種のバス構造のいずれでもよい。例示的なシステムメモリ804は、読み取り専用メモリ(ROM)808とランダムアクセスメモリ(RAM)810を含む。PC800内の要素間の情報転送を助ける基本ルーチンを含んだ基本入出力システム(BIO)812は、ROM808に記憶される。
【0072】
例示的PC800はさらに、ハードディスクへの読み書きを行うハードディスクドライブ、取り外し可能磁気ディスクへの読み書きを行う磁気ディスクドライブ、および取り外し可能光学ディスク(CD−ROMや他の光学媒体)への読み書きを行う光ディスクドライブ等の1つまたは複数の記憶装置830を含む。そのような記憶装置はそれぞれ、ハードディスクドライブインタフェース、磁気ディスクドライブインタフェース、および光ドライブインタフェースによりシステムバス806に接続されることができる。これらのドライブとそれに関連付けられたコンピュータ可読媒体は、コンピュータ可読命令、データ構造、プログラムモジュール、およびPC800のその他のデータの不揮発性の記憶を提供する。磁気カセット、フラッシュメモリカード、デジタルビデオディスク、CD、DVD、RAM、ROM等、PCからアクセスすることが可能なデータを記憶することができる他の種類のコンピュータ可読媒体もこの例示的動作環境で使用されてよい。
【0073】
記憶装置830には、オペレーティングシステム、1つまたは複数のアプリケーションプログラム、他のプログラムモジュール、およびプログラムデータを含む複数のプログラムモジュールが記憶されることができる。ユーザは、キーボードや、マウス等のポインティングデバイス等の1つまたは複数の入力装置840を通じてPC800にコマンドおよび情報を入力することができる。他の入力装置には、デジタルカメラ、マイクロフォン、ジョイスティック、ゲームパッド、衛星受信アンテナ、スキャナ等がある。上記およびその他の入力装置は多くの場合、システムバス806に結合されたシリアルポートインタフェースを通じて1つまたは複数の処理装置802に接続されるが、パラレルポート、ゲームポート、ユニバーサルシリアルバス(USB)等の他のインタフェースで接続されてもよい。モニタ846または他の種の表示装置も、ビデオアダプタ等のインタフェースを介してシステムバス806に接続される。スピーカやプリンタ(図示せず)等の他の周辺出力装置も含められてよい。
【0074】
PC800は、リモートコンピュータ860等の1つまたは複数のリモートコンピュータとの論理接続を使用したネットワーク環境で動作することができる。いくつかの例では、1つまたは複数のネットワーク接続または通信接続850が含まれる。リモートコンピュータ860は、別のPC、サーバ、ルータ、ネットワークPC、ピアデバイス、あるいは他の一般的なネットワークノードでよく、図8にはメモリ記憶装置862のみを示したが、通例はPC800との関連で上述した要素の多くまたはすべてを含む。パーソナルコンピュータ800および/またはリモートコンピュータ860は、ローカルエリアネットワーク(LAN)およびワイドエリアネットワーク(WAN)に接続されることができる。このようなネットワーク環境は、オフィス、企業規模のコンピュータネットワーク、イントラネット、およびインターネットで一般的である。LANネットワーク環境で使用される場合、PC800は、ネットワークインタフェースを通じてLANに接続される。WANネットワーク環境で使用される場合、PC800は通例、インターネット等のWANを通じて通信を確立するためのモデムまたは他の手段を備える。ネットワーク環境では、パーソナルコンピュータ800との関連で図示したプログラムモジュールまたはその一部は、遠隔のメモリ記憶装置、またはLANもしくはWAN上の他の場所に記憶されることができる。図のネットワーク接続は例示的なものであり、コンピュータ間に通信リンクを確立する他の手段が使用されてよい。図の実施形態を参照して本発明の原理を説明および例示したが、ここに例示される実施形態は、そのような原理から逸脱することなく構成および詳細に変更を加えてよいことは認識されよう。たとえば、図でソフトウェアとして示した例示実施形態の要素がハードウェアで実装されてもよく、その逆も同様である。また、任意の例の技術を他の例の1つまたは複数に記載される技術と組み合わせることができる。本発明の原理が適用されることが可能な多数の可能な実施形態に照らして、零時実施形態は本発明の例であり、本発明の範囲の制限と解釈されるべきではないことを理解されたい。たとえば、本明細書に記載されるシステムおよびツールの各種構成要素が、機能および使用において組み合わせられてよい。したがって、請求項の範囲および主旨に該当するすべての主題を本発明として請求する。これらの項目で明確に述べられた代替形態は例示的なものに過ぎず、本明細書に記載される実施形態のすべての可能な代替形態を構成するものではない。例示的実施形態を例示および説明したが、本発明の主旨および範囲から逸脱することなく各種の変更が加えられてよいことが理解されよう。
【0075】
ここに開示される本発明の原理が適用されることが可能な多くの可能な実施形態に照らして、ここに例示される実施形態は本発明の好ましい例に過ぎず、本発明の範囲を限定するものと解釈すべきでないことを理解されたい。本発明の範囲は頭記の特許請求の範囲によって定義される。したがって、その特許請求の範囲の主旨および範囲に該当するすべてを本発明として請求する。
【特許請求の範囲】
【請求項1】
少なくとも2つの構成画像からなるセットの一部を受け取るように構成されたデータセレクタと、
前記受け取った構成画像のセットの一部に基づき、前記構成画像のセット中で共通の種に関連付けられたピークの境界エリアを変更するように、ハードウェア上で実行されるように構成された領域リデファイナであって、前記境界エリアは前記構成画像のセットにわたり前記ピークの位置を同定する、領域リデファイナと
を備えることを特徴とする反復領域プロセッサ。
【請求項2】
前記共通の種に関連付けられたピークを含んでいる対象領域を、前記共通の種に関連付けられた別のピークを含んでいる、異なる構成画像中の対応する対象領域と位置合わせするように構成されたマイクロアライナをさらに備えることを特徴とする請求項1に記載のプロセッサ。
【請求項3】
前記共通の種の同定を提供するように構成されたリコンシリエータをさらに備えることを特徴とする請求項1に記載のプロセッサ。
【請求項4】
前記リコンシリエータは、ピーク再構築工程をハードウェア上で実行するピークリアセンブラを含むことを特徴とする請求項3に記載のプロセッサ。
【請求項5】
前記データセレクタは、前記構成画像の一部を合成画像の一部として受け取ることを特徴とする請求項1に記載のプロセッサ。
【請求項6】
前記データセレクタは、前記構成画像の一部を個別に受け取ることを特徴とする請求項1に記載のプロセッサ。
【請求項7】
前記構成画像はクロマトグラフィ/質量分析の画像であることを特徴とする請求項1に記載のプロセッサ。
【請求項8】
領域再定義の方法であって、
少なくとも2つの構成画像からなるセットに関連付けられた少なくとも1つの対象領域を定義することと、
前記構成画像のセットまたは前記構成画像のセットに関連付けられた合成画像に基づいて対象領域を再定義することと、
構成画像にわたり共通の種に関連付けられていると識別されるピークの境界エリアを変更することであって、前記境界エリアは前記構成画像のセット中でピークの位置を同定する、変更することと
を備えることを特徴とする方法。
【請求項9】
前記構成画像のセットから選択された少なくとも2つの構成画像の一部のみを位置合わせすることをさらに備え、前記構成画像の一部は、個々の対象領域に関連付けられていることを特徴とする請求項8に記載の方法。
【請求項10】
前記合成画像の分割に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項11】
個々の構成画像に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項12】
再定義は、合成画像の合成スニペットを形成することによりピークの境界エリアを変更することを含み、前記合成スニペットは、前記構成画像のセット中で前記共通の種に関連付けられたピークをとらえることを特徴とする請求項8に記載の方法。
【請求項13】
前記合成スニペットを分割し、前記合成スニペットに基づいて分割後のピークを識別することをさらに備えることを特徴とする請求項12に記載の方法。
【請求項14】
共通ピーク境界に基づいて、前記構成画像のセットに見つけられるピークの前記境界エリアを変更することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項15】
分析用の対象領域を選択する方法を実装するためのコンピュータ実行可能命令が格納されたコンピュータ可読媒体であって、前記方法は、
少なくとも2つの構成画像を含む合成画像または構成画像のセットを選択することと、
前記構成画像のセットの前記構成画像にわたって共通の種を指すピークの境界エリアを変更するように、前記合成画像、または、前記構成画像のセットの構成画像の少なくとも1つ、のうちの少なくとも1つに関連付けられた選択領域を再定義することであって、前記境界エリアは、前記ピークの位置を同定することと
を備えることを特徴とするコンピュータ可読媒体。
【請求項16】
前記方法は、前記構成画像のセット中の少なくとも2つの構成画像の領域のみを位置合わせすることをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項17】
前記方法は、前記合成画像の分割に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項18】
前記方法は、前記構成画像に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項19】
再定義は、前記構成画像のセットにわたり前記共通の種に関連付けられたピークを含む合成スニペットを形成することにより、前記合成画像上に見つけられるピークの前記境界エリアを変更することを含むことを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項20】
前記方法は、前記合成スニペットを分割し、分割された分割ピークを共にまとめることに基づいて前記共通の種を同定することをさらに備えることを特徴とする請求項19に記載のコンピュータ可読媒体。
【請求項21】
再定義は、共通ピーク境界を形成することにより、前記構成画像上に見つけられるピークの前記境界エリアを変更することを含むことを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項22】
前記構成画像はクロマトグラフィ/質量分析の画像であることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項1】
少なくとも2つの構成画像からなるセットの一部を受け取るように構成されたデータセレクタと、
前記受け取った構成画像のセットの一部に基づき、前記構成画像のセット中で共通の種に関連付けられたピークの境界エリアを変更するように、ハードウェア上で実行されるように構成された領域リデファイナであって、前記境界エリアは前記構成画像のセットにわたり前記ピークの位置を同定する、領域リデファイナと
を備えることを特徴とする反復領域プロセッサ。
【請求項2】
前記共通の種に関連付けられたピークを含んでいる対象領域を、前記共通の種に関連付けられた別のピークを含んでいる、異なる構成画像中の対応する対象領域と位置合わせするように構成されたマイクロアライナをさらに備えることを特徴とする請求項1に記載のプロセッサ。
【請求項3】
前記共通の種の同定を提供するように構成されたリコンシリエータをさらに備えることを特徴とする請求項1に記載のプロセッサ。
【請求項4】
前記リコンシリエータは、ピーク再構築工程をハードウェア上で実行するピークリアセンブラを含むことを特徴とする請求項3に記載のプロセッサ。
【請求項5】
前記データセレクタは、前記構成画像の一部を合成画像の一部として受け取ることを特徴とする請求項1に記載のプロセッサ。
【請求項6】
前記データセレクタは、前記構成画像の一部を個別に受け取ることを特徴とする請求項1に記載のプロセッサ。
【請求項7】
前記構成画像はクロマトグラフィ/質量分析の画像であることを特徴とする請求項1に記載のプロセッサ。
【請求項8】
領域再定義の方法であって、
少なくとも2つの構成画像からなるセットに関連付けられた少なくとも1つの対象領域を定義することと、
前記構成画像のセットまたは前記構成画像のセットに関連付けられた合成画像に基づいて対象領域を再定義することと、
構成画像にわたり共通の種に関連付けられていると識別されるピークの境界エリアを変更することであって、前記境界エリアは前記構成画像のセット中でピークの位置を同定する、変更することと
を備えることを特徴とする方法。
【請求項9】
前記構成画像のセットから選択された少なくとも2つの構成画像の一部のみを位置合わせすることをさらに備え、前記構成画像の一部は、個々の対象領域に関連付けられていることを特徴とする請求項8に記載の方法。
【請求項10】
前記合成画像の分割に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項11】
個々の構成画像に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項12】
再定義は、合成画像の合成スニペットを形成することによりピークの境界エリアを変更することを含み、前記合成スニペットは、前記構成画像のセット中で前記共通の種に関連付けられたピークをとらえることを特徴とする請求項8に記載の方法。
【請求項13】
前記合成スニペットを分割し、前記合成スニペットに基づいて分割後のピークを識別することをさらに備えることを特徴とする請求項12に記載の方法。
【請求項14】
共通ピーク境界に基づいて、前記構成画像のセットに見つけられるピークの前記境界エリアを変更することをさらに備えることを特徴とする請求項8に記載の方法。
【請求項15】
分析用の対象領域を選択する方法を実装するためのコンピュータ実行可能命令が格納されたコンピュータ可読媒体であって、前記方法は、
少なくとも2つの構成画像を含む合成画像または構成画像のセットを選択することと、
前記構成画像のセットの前記構成画像にわたって共通の種を指すピークの境界エリアを変更するように、前記合成画像、または、前記構成画像のセットの構成画像の少なくとも1つ、のうちの少なくとも1つに関連付けられた選択領域を再定義することであって、前記境界エリアは、前記ピークの位置を同定することと
を備えることを特徴とするコンピュータ可読媒体。
【請求項16】
前記方法は、前記構成画像のセット中の少なくとも2つの構成画像の領域のみを位置合わせすることをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項17】
前記方法は、前記合成画像の分割に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項18】
前記方法は、前記構成画像に基づいて、前記構成画像のセットに関連付けられた少なくとも1つの共通の種を同定することをさらに備えることを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項19】
再定義は、前記構成画像のセットにわたり前記共通の種に関連付けられたピークを含む合成スニペットを形成することにより、前記合成画像上に見つけられるピークの前記境界エリアを変更することを含むことを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項20】
前記方法は、前記合成スニペットを分割し、分割された分割ピークを共にまとめることに基づいて前記共通の種を同定することをさらに備えることを特徴とする請求項19に記載のコンピュータ可読媒体。
【請求項21】
再定義は、共通ピーク境界を形成することにより、前記構成画像上に見つけられるピークの前記境界エリアを変更することを含むことを特徴とする請求項15に記載のコンピュータ可読媒体。
【請求項22】
前記構成画像はクロマトグラフィ/質量分析の画像であることを特徴とする請求項15に記載のコンピュータ可読媒体。
【図1A】

【図1B】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】

【図4A】

【図4B】
【図4C】
【図4D】
【図5A】

【図5B】
【図5C】
【図5D】

【図5E】

【図5F】
【図5G】

【図5H】
【図5I】

【図5J】

【図5K】
【図5L】

【図5M】
【図5N】

【図5O】

【図5P】

【図5Q】
【図5R】
【図5S】
【図5T】
【図5U】
【図5V】
【図6A】

【図6B】
【図6C】

【図6D】

【図6E】

【図6F】

【図6G】

【図6H】

【図6I】

【図6J】
【図6K】

【図6L】
【図6M】
【図6N】
【図6O】
【図6P】
【図6Q】
【図7A】
【図7B】
【図7C】
【図7D】
【図7E】
【図7F】
【図7G】

【図7H】
【図7I】
【図7J】
【図7K】
【図7L】
【図7M】
【図7N】
【図8】
【図1B】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図4A】
【図4B】
【図4C】
【図4D】
【図5A】
【図5B】
【図5C】
【図5D】
【図5E】
【図5F】
【図5G】
【図5H】
【図5I】
【図5J】
【図5K】
【図5L】
【図5M】
【図5N】
【図5O】
【図5P】
【図5Q】
【図5R】
【図5S】
【図5T】
【図5U】
【図5V】
【図6A】
【図6B】
【図6C】
【図6D】
【図6E】
【図6F】
【図6G】
【図6H】
【図6I】
【図6J】
【図6K】
【図6L】
【図6M】
【図6N】
【図6O】
【図6P】
【図6Q】
【図7A】
【図7B】
【図7C】
【図7D】
【図7E】
【図7F】
【図7G】
【図7H】
【図7I】
【図7J】
【図7K】
【図7L】
【図7M】
【図7N】
【図8】
【公開番号】特開2010−118053(P2010−118053A)
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−244694(P2009−244694)
【出願日】平成21年10月23日(2009.10.23)
【出願人】(500046438)マイクロソフト コーポレーション (3,165)
【Fターム(参考)】
【公開日】平成22年5月27日(2010.5.27)
【国際特許分類】
【出願番号】特願2009−244694(P2009−244694)
【出願日】平成21年10月23日(2009.10.23)
【出願人】(500046438)マイクロソフト コーポレーション (3,165)
【Fターム(参考)】
[ Back to top ]