
収差補正装置及び収差補正方法
【課題】光学レンズにより生じる画像の倍率色収差、歪曲収差の補正を、一括して行うことを可能とする。
【解決手段】三原色の各色の画素の収差を補正する画素収差補正回路21〜23と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタ27とを備える。各画素収差を補正する画素収差補正回路21〜23は、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリ25と、レンズパラメータに対応して各画素の位置歪みを補正した位置座標データを保持している歪み補正パラメータテーブル24とを備える。歪み補正パラメータテーブル24は、画面アドレスカウンタからの画面座標が入力され、入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、読み出された座標値に従ってバッファメモリ25から対応する画素の画素値が読み出されて出力される。
【解決手段】三原色の各色の画素の収差を補正する画素収差補正回路21〜23と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタ27とを備える。各画素収差を補正する画素収差補正回路21〜23は、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリ25と、レンズパラメータに対応して各画素の位置歪みを補正した位置座標データを保持している歪み補正パラメータテーブル24とを備える。歪み補正パラメータテーブル24は、画面アドレスカウンタからの画面座標が入力され、入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、読み出された座標値に従ってバッファメモリ25から対応する画素の画素値が読み出されて出力される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、収差補正装置及び収差補正方法に係り、特に、光学レンズにより画像を形成し、画像処理を行う製品等に用いて好適で、光学レンズにより生じる画像の倍率色収差、歪曲収差、それらの両収差の補正を行うことを可能とした収差補正装置及び収差補正方法に関する。
【背景技術】
【0002】
一般に、光学レンズにより画像を形成し、あるいは、画像処理を行う製品(放送用カメラ、ビデオカメラ、一眼レフカメラ、プロジェクタ等)は、形成した画像あるいは処理した画像に倍率色収差を含ませてしまうという問題を有している。倍率色収差とは、画像の中央は倍率色収差が少なくはっきり見えても、画像の端の方では倍率色収差が大きく色がにじんで見えるという現象である。
【0003】
このため、通常、前述したような問題を避けるため、光学レンズを使用する製品は、レンズとして、屈折率の異なる複数枚のレンズを組み合わせたレンズを使用したり、色収差の少ない中央部の画像のみを利用している。
【0004】
光学レンズ系により画像に生じる倍率色収差を電気的な処理により補正することを可能とした従来技術として、例えば、特許文献1等に記載された技術が知られている。この従来技術は、レンズの色収差(倍率色収差)による映像の色のずれ(にじみ)を補正する技術に係り、特に、画素毎にずれを補正するための補正量を算出して、入力された三原色の原色信号のそれぞれを補正するというものである。
【0005】
具体的には、前述の従来技術は、レンズパラメータ入力手段から入力された撮影レンズパラメータに基づいて、補正データ記憶手段に記憶された、当該撮影レンズパラメータの値を挟む2つ以上のレンズパラメータの補正データを選定する補正データ選定手段と、この補正データ選定手段によって選定された補正データに基づいて、前記撮影レンズパラメータにおけるレンズの倍率色収差による各画素の第2及び第3の原色の結像位置のずれを補正するための補正量を、補間して算出する補正量算出手段と、この補正量算出手段によって算出された補正量に基づいて、第2及び第3の原色信号の各画素の明るさを示す画素値を補正する収差補正手段と、第1の原色信号と前記収差補正手段によって画素値が補正された第2及び第3の原色信号とを出力する信号出力手段とを備えるというものである。
【0006】
すなわち、前述の従来技術は、三原色の色(G、B、R)の1つである色G(第1の原色)の画素Gを基準として、画素Gと画素B(第2の原色)とのズレ量、画素Gと画素R(第3の原色)とのズレ量を補正するというものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−135805号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した従来技術は、三原色の色の1つである色Gの画素Gに対する画素R、画素Bのズレ量を補正するというものであり、画素Gは歪まない(歪曲収差がない)ことを前提としているが、画素Gが歪まないという保証はなく、画素Gそのものの座標に歪みがあり、画素Gの座標にずれがあるような場合、その補正を行うことができないという問題点を有している。
【0009】
すなわち、前述した従来技術は、倍率色収差の補正を基準画素Gからの画素B、画素Rのズレ量により行うことが可能であるが、歪曲収差の補正を行おうとすると、幾何座標変換するため画素G、画素B、画素Rの全ての座標がパラメータになるので、基準画素Gの座標も必要になり、このため、歪曲収差をも合わせて補正することができないという問題点を有している。
【0010】
画素Gの位置ずれを生じさせる例として、例えば、光学系レンズ及びプリズムを経由して3枚のCCDまたはCMOSデバイスを使用してカラー画像を得る場合があり、この場合、3枚のCCDまたはCMOSデバイスに配列された理想的な画素位置座標に対して画素Gのズレが生じることがある。また、3個の撮像管を使用してカラー画像を得る場合があり、この場合、撮像管の電磁偏向特性を3個の撮像管の全ての間で全く同じにすることが難しく、これにより、画素Gのズレが生じることがある。
【0011】
本発明の目的は、前述したような従来技術の問題点を解決し、光学レンズにより生じる画像の倍率色収差、歪曲収差あるいはそれらの両方の収差の補正を、画面を構成する三原色の各画素G、B、Rの全ての幾何歪みを補正することによって、1つの回路で一括して行うことを可能とした収差補正装置及び収差補正方法を提供することにある。
【課題を解決するための手段】
【0012】
本発明によれば前記目的は、光学レンズにより生じる画像の収差を補正する収差補正装置において、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることにより達成される。
【発明の効果】
【0013】
本発明によれば、光学レンズにより生じる画像の倍率色収差、歪曲収差、それらの両方の収差の補正を、1つの回路で一括して行うことができ、これにより、高価なレンズを使用しなくても、光学レンズにより生じる画像の倍率色収差、歪曲収差のそれぞれを単独に、また、倍率色収差、歪曲収差の両方をリアルタイムに補正して、高級レンズを使用したと同等以上の画質を持った画像を得ることができる。
【図面の簡単な説明】
【0014】
【図1】レンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とを示す図である。
【図2】本発明の一実施形態による収差補正装置の構成を示すブロック図である。
【図3】本発明の実施形態で扱う画面構成の例を示す図である。
【図4】倍率色収差の例を説明する図である。
【図5】図1で説明した歪曲収差を持つ画像を歪みのない画像に補正する例を説明する図である。
【図6】倍率色収差及び歪曲収差による画素の位置座標のずれの補正について説明する図である。
【図7】歪み補正パラメータテーブルに格納されている倍率色収差及び歪曲収差補正パラメータの構成例を説明する図である。
【図8】レンズパラメータテーブルの構成を説明する図である。
【図9】補間演算回路での補間演算の例を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明による収差補正装置の実施形態を図面により詳細に説明する。
【0016】
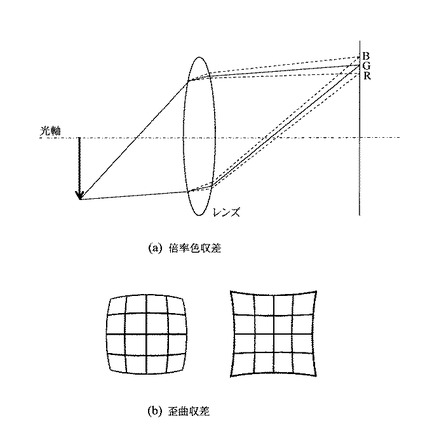
図1はレンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とを示す図であり、本発明によるに収差補正装置の実施形態を説明する前に、まず、図1を参照してレンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とについて説明する。
【0017】
図1(a)は倍率色収差の発生原理を説明する図である。レンズの色収差には、軸上色収差と倍率色収差とがある。軸上色収差は、光の波長による結像点をズレさせる収差である。前述の倍率色収差は、光の波長によって像の倍率を異ならせる収差、すなわち、色によって像の大きさを異ならせるような収差である。この倍率色収差による結像点のズレ量は、一般に、レンズパラメータ(ズーム、フォーカス、アイリス(絞り))によって異なる。
【0018】
図1(a)には、1枚のレンズによる倍率色収差の例を示しており、レンズの光の波長による屈折率違いにより、1点からのR、G、Bの各色の像が、異なった位置に結像してしまうことを示している。
【0019】
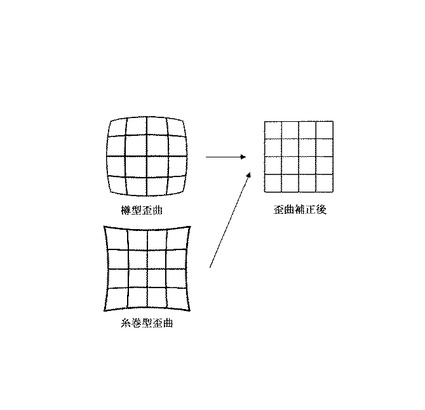
図1(b)は歪曲収差が発生した画像の例を示す図である。レンズの歪曲収差は、主に、樽型歪みと呼ばれる収差と、糸巻き型歪みと呼ばれる収差とがある。樽型歪みは、図1(b)の左側に示すように、画像の上下、左右の中央部が膨らむ歪みであり、糸巻き型歪みは、図1(b)の右側に示すように、画像の上下、左右の中央部が凹む歪みである。
【0020】
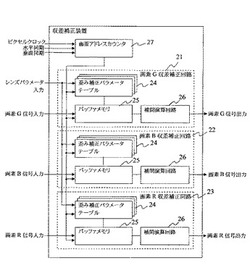
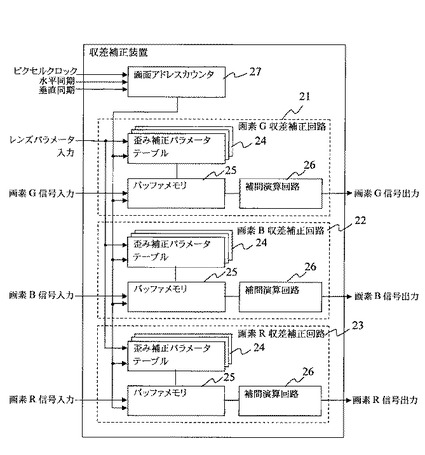
図2は本発明の一実施形態による収差補正装置の構成を示すブロック図、図3は本発明の実施形態で扱う画面構成の例を示す図である。図2に示す本発明による収差補正装置の実施形態は、倍率色収差及び歪曲収差を補正することができるようにした倍率色収差及び歪曲収差補正装置の例である。
【0021】
図2に示す収差補正装置は、CPU、主メモリ、HDD等による記憶装置、入出力装置を備えて構成される図示していない情報処理装置の中に構築されるもである。そして、図2に示す収差補正装置は、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路21、画素B収差補正回路22、画素R収差補正回路23及び画面アドレスカウンタ27を備えて構成され、これらの機能部は、情報処理装置内の主記憶装置の中に構成されており、CPUにより制御されて本発明の実施形態での動作が行われることになる。
【0022】
各画素収差補正回路21〜23のそれぞれは、入力される各色信号毎の画素G、B、R信号が入力されて画像イメージデータの全て(1枚の画面の全データ)またはその一部を一時的に保持する複数行のラインメモリで構成されるバッファメモリ25、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正したデータを保持している歪み補正パラメータテーブル24、各画素の画素値を補正する補間演算回路26により構成される。
【0023】
本発明の実施形態で扱う画面は、画像を構成する最小単位の画素(G、B、R)が水平方向、垂直方向に配置されて構成される。そして、画面アドレスカウンタ27は、前述の画面における水平方向の画素アドレス、垂直方向の画素アドレスを示すためのもので、水平方向の画素数カウンタと垂直方向のライン数カウンタとにより構成される。
【0024】
画面アドレスカウンタ27には、ピクセルクロック信号、水平同期信号、垂直同期信号が加えられる。前述の水平方向の画素数カウンタは、ピクセルクロック信号が1つ入力される毎に1加算される。また、垂直方向のライン数カウンタは、水平同期信号が1つ入力される毎に1加算される。そして、水平方向の画素数カウンタは、水平同期信号が1つ入力される毎に初期状態にクリアされ、また、垂直方向ライン数カウンタは、該カウンタが画面構成の垂直方向の画素数をカウントしたときに初期状態にクリアされる。
【0025】
各画素の位置歪み(位置ずれ)を補正するデータを保持している歪み補正パラメータテーブル24の内容を設定しているレンズパラメータには、レンズ位置等の設定状態を示すもので、ズーム、フォーカス、アイリス(絞り)等がある。このレンズ位置等の設定状態は、数値化されて歪み補正パラメータテーブル24に格納されている。このような歪み補正パラメータテーブル24は、指定されたレンズパラメータに対応して選択されるので、複数のテーブルが用意されている。
【0026】
画素G、画素B、画素Rの各信号入力は、対応する画素収差補正回路21〜23のそれぞれに入力される。
【0027】
以下、画素G収差補正回路21の動作について説明するが、画素B、画素Rの画素収差補正回路22、23も同様である。
【0028】
画素G信号入力として画素G収差補正回路21に入力される画素G入力信号は、画面アドレスカウンタ27が指定するバッファメモリ25の水平方向、垂直方向の画素位置に記録される。
【0029】
本発明の実施形態では、前述したような画像信号の入力の処理と並行して、収差補正の処理が行われる。次に、本発明の実施形態での収差補正の処理を説明する。
【0030】
収差補正の処理において、構成の詳細を後述する歪み補正パラメータテーブル24には、画面アドレスカウンタ27からの画面座標が入力される。そして、補正パラメータテーブル24からは、画面アドレスカウンタ27から入力された画面座標の画素に対する倍率色収差及び歪曲収差を補正した補正後の座標値が読み出され、この座標値に従ってバッファメモリ25から対応する画素の画素値が読み出される。しかし、補正後の座標値は、画面座標の交点に収まらないものであるため、読み出された座標値の近傍の複数の座標の画素の画素値が読み出されて補間演算回路26に入力され、補間演算回路26により所望の画素値が求められて、画面アドレスカウンタ27から入力された画面座標の画素値として出力される。説明している例では、補間演算回路26で求められた所望の画素値は、画素G信号出力として出力されることになる。
【0031】
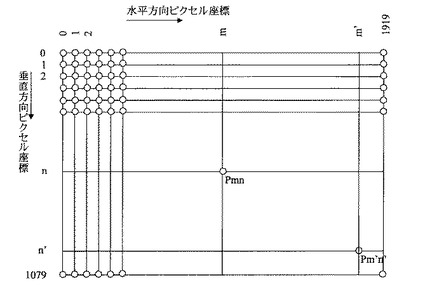
本発明の実施形態で扱う画面は、図3に示す画面構成の例のように、画像を構成する最小単位のピクセルと呼ぶ画素(G、B、R)により構成され、ピクセルの座標は、水平方向座標、垂直方向座標で表されるものとする。
【0032】
図3に示す例は、解像度2,073,600ピクセルの画面座標例を示しており、水平方向ピクセル座標0〜1919、垂直方向ピクセル座標0〜1079により構成される。本発明の実施形態では、水平方向ピクセル座標m、垂直方向ピクセル座標nの画素座標をPmnで表し、水平方向ピクセル座標m’、垂直方向ピクセル座標n’の画素座標をPm’n’で表すものとする。
【0033】
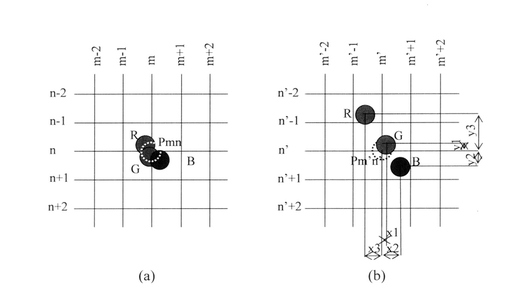
図4は倍率色収差の例を説明する図である。図4(a)は画面中央付近にある座標Pmnの画素(G、B、R)を示したもので、基準座標Pmnに対して画素G、画素B、画素Rのズレ量が少ない。図4(b)は画面の端面近くにある座標Pm’n’の画素(G、B、R)を示したもので、基準座標Pm’n’に対して画素G、画素B、画素Rのズレ量が大きくなっている。本発明の実施形態において、基準座標Pm’n’に対して、画素Gの水平方向のズレ量をx1、垂直方向のズレ量をy1で示すこととする。同様に、画素Bの水平方向のズレ量をx2、垂直方向のズレ量をy2で示し、画素Rの水平方向のズレ量をx3、垂直方向ズレ量をy3で示すこととする。
【0034】
図5は図1で説明した歪曲収差を持つ画像を歪みのない画像に補正する例を説明する図である。
【0035】
図1によりすでに説明したように、光学系レンズの代表的な歪曲収差には樽型歪曲収差、糸巻き型歪曲収差とがあり、図5の左側に再度示している。このような歪みを受けた画像は、例えば、その画像がCCDまたはCMOSデバイスにより取り込まれた場合、これらのデバイスに取り込まれた画素の画素位置と、本来あるべき画素位置とがずれることになる。本発明の実施形態では、図2に示す収差補正装置により、このような画素位置のずれを補正して、図5の右側に示しているような歪みのない画像を得るようにしたものである。
【0036】
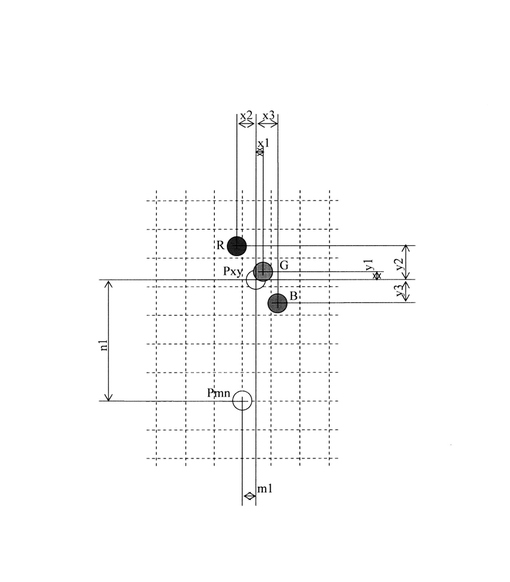
図6は倍率色収差及び歪曲収差による画素の位置座標のずれの補正について説明する図である。図6には画面アドレスカウンタ27により指し示される本来あるべき画素位置Pmnにある画素が歪曲収差により画素位置Pxyに移動し、さらに、倍率色収差により、画素を構成する画素Gの座標位置がPx+x1,y+y1 に移動し、画素Rの座標位置がPx+x2,y+y2 に移動し、画素Bの座標位置がPx+x3,y+y3 に移動したものとして示している。
【0037】
図6に示した例のような場合、倍率色収差及び歪曲収差による画素の位置座標のずれの補正座標は、以下に示すように求めることができる。すなわち、
画面座標Pmnの歪曲収差補正座標(=Pxy)は、
Pxy=Pm+m1,n+n1
として求めることができ、また、
歪曲座標補正後の画面座標Pxyの倍率色収差の補正座標は、
座標Pxyの画素Gの補正座標=Px+x1,y+y1
座標Pxyの画素Rの補正座標=Px+x2,y+y2
座標Pxyの画素Bの補正座標=Px+x3,y+y3
として求めることができる。
【0038】
従って、画面座標Pmnの歪曲収差及び倍率色収差の補正座標は、
座標Pmnの画素Gの補正座標=Pm+m1+x1,n+n1+y1
座標Pmnの画素Rの補正座標=Pm+m1+x2,n+n1+y2
座標Pmnの画素Bの補正座標=Pm+m1+x3,n+n1+y3
として求めることができる。
【0039】
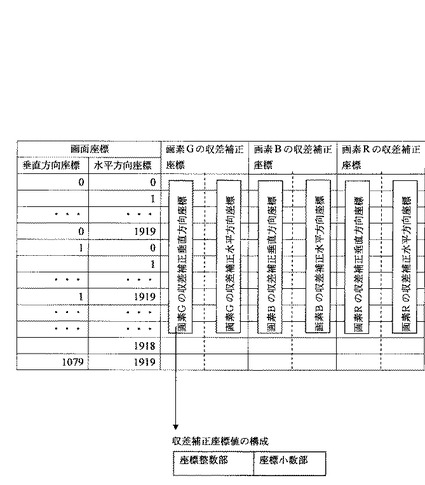
図7は歪み補正パラメータテーブルに格納されている倍率色収差及び歪曲収差補正パラメータの構成例を説明する図である。
【0040】
倍率色収差及び歪曲収差補正パラメータは、図7に示すように、画面座標、画素Gの収差補正座標、画素Bの収差補正座標、画素Rの収差補正座標のデータにより構成される。そして、図示テーブル内の各画面座標は、垂直方向座標と水平方向座標とにより構成され、画面アドレスカウンタ27により指定される整数値であり、図6により説明した画面座標Pmnを示している。
【0041】
画素(G、B、R)の収差補正座標は、画面座標Pmnに示されるピクセル単位に設定された少数点を含む数値となるが、処理における論理演算を簡単にするため、2進数で示す整数部と、2進数で示す小数部とにより表現されている。この収差補正パラメータは、必ずしもピクセル単位に設定する必要はなく、画面を複数のゾーンに分けてゾーン単位に補正パラメータを設定するように構成することもできる。
【0042】
前述から判るように、図2に示す画面アドレスカウンタ27の値が図7に示しているテーブルの水平方向座標、垂直方向座標に対応し、画面アドレスカウンタ27の値で示されるテーブルの画面座標に対応する画素(G、B、R)の収差補正座標が読み出されることになる。
【0043】
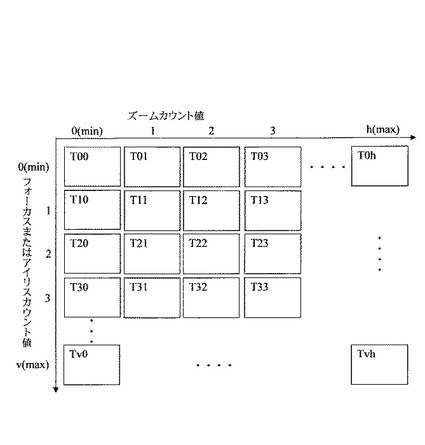
図8はレンズパラメータテーブルの構成を説明する図である。
【0044】
レンズの物理的な設定値を示すレンズパラメータとしては、ズーム、フォーカス、アイリス(絞り)等がある。例えば、ズームレンズは、広角〜望遠まで変化するものであるので、その設定を数値(カウント値)で表現した複数のズームカウント値で示すものとする。そして、このズームカウント値を横軸方向に配置する。また、フォーカス、または、アイリスについても、複数の設定を数値(カウント値)で表現したフォーカスカウント値、または、アイリスカウント値で示すものとする。そして、このフォーカスカウント値、または、アイリスカウント値を縦軸方向に配置する。
【0045】
なお、前述したズームカウント値は、ズームレンズを構成するレンズ間距離に対応して数値化された値であり、通常、よく利用されているものである。
【0046】
図8に示すレンズパラメータテーブルは、前述したズームカウント値とフォーカスカウント値、または、アイリスカウント値との交点のそれぞれに倍率色収差及び歪曲収差補正パラメータをレンズパラメータとして配置したものとなる。図8の例の場合、レンズパラメータテーブルは、横軸方向にズームのカウント値を示す設定ポイントを0〜hまで配置し、縦軸方向にフォーカス、または、アイリスのカウント値を示す設定ポイントを0〜vまで配置しているのて、(1+h)×(1+v)の倍率色収差及び歪曲収差補正パラメータのレンズパラメータが用意されているものとする。
【0047】
図8において、例えば、ズームカウント値=h、フォーカスカウント値=vのレンズパラメタテーブルはTvhであり、ズームカウント値=0、フォーカスカウント値=0のレンズパラメタテーブルはT00である。このため、図8に示す例の場合、レンズパラメータT00〜Tvhのレンズパラメータテーブルがあることになる。これらのレンズパラメータテーブルの内容は、図7に示して説明した倍率色収差及び歪曲収差補正パラメータそのものである。
【0048】
従って、図2に示して説明した本発明の実施形態による収差補正装置は、収差補正処理の開始時にレンズパラメータが入力されると、図8により説明したレンズパラメータテーブルT00〜Tvhの1つが選択されて使用されることになる。
【0049】
前述で説明した図8に示すレンズパラメータテーブルは、縦軸方向にフォーカス(またはアイリス)のカウント値を示す設定ポイントを0〜vまで配置するとしている。前述したように、レンズパラメータとしては、ズーム、フォーカス、アイリス(絞り)があるので、3つのパラメータのカウント値の組み合わせ毎にレンズパラメータテーブルを用意することも可能であるが、このようにするとレンズパラメータテーブルの数が極めて多数となってしまうので、本発明の実施形態では、縦軸方向にフォーカス、または、アイリスのカウント値を用いることとしている。
【0050】
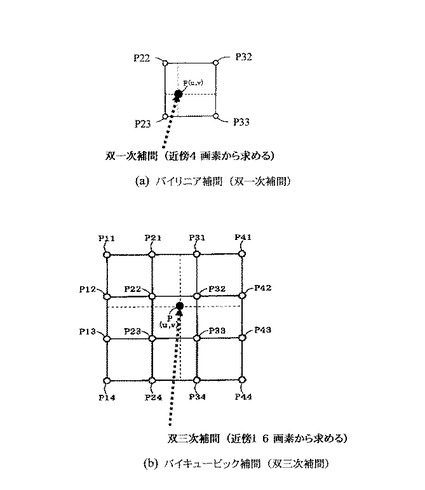
図9は補間演算回路26での補間演算の例を説明する図である。補間演算としては、近傍4画素から目的の画素値を求める双一次補間(バイリニア補間)、近傍16画素から目的の画素値を求める双三次補間(バイキュービック補間)等が知られている。
【0051】
図9(a)に示す双一次補間(バイリニア補間)の例は、補正座標値P(u,v) の画素値を求める場合、補正座標値P(u,v) の周辺の座標P22、P23、P32、P33の画素の画素値から補正座標値P(u,v) の画素値を求めている例である。また、図9(b)に示す双三次補間(バイキュービック補間)の例は、補正座標値P(u,v) の画素値を求める場合、補正座標値P(u,v) の周辺の16画素、すなわち、座標P11〜P44の16の画素の画素値から補正座標値P(u,v) の画素値を求めている例である。これらの補間演算の方法は、公知の方法であるので、ここでの説明を省略する。
【0052】
前述した本発明の実施形態によれば、基準座標に対する画素G、画素B、画素Rの全てのズレ量をパラメータとして用いているので、光学系レンズ(ズームレンズ、単焦点レンズ)の倍率色収差の補正だけでなく、歪曲収差の補正をも行うことができ、また、倍率色収差及び歪曲収差を合わせて同時に補正することができる。
【0053】
前述した本発明の実施形態によれば、撮像管の電磁偏向特性ばらつきによる色ズレ補正、3個の撮像デバイス(CCD、CMOS等)、または、撮像管(HARP等)で構成する場合の画素G、B、Rの位置ズレによる色ズレの補正を行うことができる。
【0054】
例えば、3枚の撮像デバイス(CCD、CMOSなど)で画像のカラー化を行う場合、撮像デバイスの取付け誤差の影響で画素G、画素B、画素Rの色ズレが発生するが、前述した本発明の実施形態によれば、このズレ量を歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることにより位置ズレ補正が可能となり、倍率色収差、歪曲収差の両方を合わせた微妙な位置ズレの補正行うことが可能である。
【0055】
また、三原色を3本の撮像管(HARPデバイス等)で撮影してカラー画像を構成する場合、撮像管G、撮像管B、撮像管Rの電子ビームを走査させる電磁偏向系の特性のばらつきにより、画素G、画素B、画素Rの色ズレが発生する問題があるが、前述した本発明の実施形態によれば、前述の色ズレ量を歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることにより倍率色収差、歪曲収差、位置ズレの補正に合わせて電磁偏向特性のばらつきの補正をも行うことが可能である。
【0056】
また、従来、高価なレンズの比較的歪みの少ない中央部分の画像を使用していたが、前述した本発明の実施形態によれば、廉価なレンズの収差(倍率色収差、歪曲収差など)を補正して、高性能レンズに匹敵する性能を確保することができる。これにより、組レンズの枚数を少なくすることができるので、価格低減効果だけでなくレンズ枚数を少なくすることにより明るさの向上を図ることができる。
【0057】
さらに、従来、3枚の撮像デバイスの位置ズレに伴う色ズレ補正は手作業に頼っているのが一般的であるが、前述した本発明の実施形態によれば、前述のような3枚の撮像デバイスの位置ズレに伴う色ズレ補正をデジタル的に自動調整を行うことが可能で、調整を容易に行うことができる。
【0058】
前述した本発明の実施形態は、光学系レンズを使用して構成されている製品であるビデオカメラ、一眼レフカメラ、デジタルカメラ、プロジェクタ等に応用可能であり、また、電磁偏向走査の撮像管を用いて構成されている製品である超高感度HARPカメラ等にも応用可能である。
【0059】
また、前述した本発明の実施形態は、3個(または複数)の撮像デバイスを使用して三原色の画素G、画素B、画素Rを表現することにより画像をカラー化する製品の色ズレ補正に応用することができる。
【符号の説明】
【0060】
21 画素G収差補正回路
22 画素B収差補正回路
23 画素R収差補正回路
24 歪み補正パラメータテーブル
25 バッファメモリ
26 補間演算回路
27 画面アドレスカウンタ
【技術分野】
【0001】
本発明は、収差補正装置及び収差補正方法に係り、特に、光学レンズにより画像を形成し、画像処理を行う製品等に用いて好適で、光学レンズにより生じる画像の倍率色収差、歪曲収差、それらの両収差の補正を行うことを可能とした収差補正装置及び収差補正方法に関する。
【背景技術】
【0002】
一般に、光学レンズにより画像を形成し、あるいは、画像処理を行う製品(放送用カメラ、ビデオカメラ、一眼レフカメラ、プロジェクタ等)は、形成した画像あるいは処理した画像に倍率色収差を含ませてしまうという問題を有している。倍率色収差とは、画像の中央は倍率色収差が少なくはっきり見えても、画像の端の方では倍率色収差が大きく色がにじんで見えるという現象である。
【0003】
このため、通常、前述したような問題を避けるため、光学レンズを使用する製品は、レンズとして、屈折率の異なる複数枚のレンズを組み合わせたレンズを使用したり、色収差の少ない中央部の画像のみを利用している。
【0004】
光学レンズ系により画像に生じる倍率色収差を電気的な処理により補正することを可能とした従来技術として、例えば、特許文献1等に記載された技術が知られている。この従来技術は、レンズの色収差(倍率色収差)による映像の色のずれ(にじみ)を補正する技術に係り、特に、画素毎にずれを補正するための補正量を算出して、入力された三原色の原色信号のそれぞれを補正するというものである。
【0005】
具体的には、前述の従来技術は、レンズパラメータ入力手段から入力された撮影レンズパラメータに基づいて、補正データ記憶手段に記憶された、当該撮影レンズパラメータの値を挟む2つ以上のレンズパラメータの補正データを選定する補正データ選定手段と、この補正データ選定手段によって選定された補正データに基づいて、前記撮影レンズパラメータにおけるレンズの倍率色収差による各画素の第2及び第3の原色の結像位置のずれを補正するための補正量を、補間して算出する補正量算出手段と、この補正量算出手段によって算出された補正量に基づいて、第2及び第3の原色信号の各画素の明るさを示す画素値を補正する収差補正手段と、第1の原色信号と前記収差補正手段によって画素値が補正された第2及び第3の原色信号とを出力する信号出力手段とを備えるというものである。
【0006】
すなわち、前述の従来技術は、三原色の色(G、B、R)の1つである色G(第1の原色)の画素Gを基準として、画素Gと画素B(第2の原色)とのズレ量、画素Gと画素R(第3の原色)とのズレ量を補正するというものである。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−135805号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述した従来技術は、三原色の色の1つである色Gの画素Gに対する画素R、画素Bのズレ量を補正するというものであり、画素Gは歪まない(歪曲収差がない)ことを前提としているが、画素Gが歪まないという保証はなく、画素Gそのものの座標に歪みがあり、画素Gの座標にずれがあるような場合、その補正を行うことができないという問題点を有している。
【0009】
すなわち、前述した従来技術は、倍率色収差の補正を基準画素Gからの画素B、画素Rのズレ量により行うことが可能であるが、歪曲収差の補正を行おうとすると、幾何座標変換するため画素G、画素B、画素Rの全ての座標がパラメータになるので、基準画素Gの座標も必要になり、このため、歪曲収差をも合わせて補正することができないという問題点を有している。
【0010】
画素Gの位置ずれを生じさせる例として、例えば、光学系レンズ及びプリズムを経由して3枚のCCDまたはCMOSデバイスを使用してカラー画像を得る場合があり、この場合、3枚のCCDまたはCMOSデバイスに配列された理想的な画素位置座標に対して画素Gのズレが生じることがある。また、3個の撮像管を使用してカラー画像を得る場合があり、この場合、撮像管の電磁偏向特性を3個の撮像管の全ての間で全く同じにすることが難しく、これにより、画素Gのズレが生じることがある。
【0011】
本発明の目的は、前述したような従来技術の問題点を解決し、光学レンズにより生じる画像の倍率色収差、歪曲収差あるいはそれらの両方の収差の補正を、画面を構成する三原色の各画素G、B、Rの全ての幾何歪みを補正することによって、1つの回路で一括して行うことを可能とした収差補正装置及び収差補正方法を提供することにある。
【課題を解決するための手段】
【0012】
本発明によれば前記目的は、光学レンズにより生じる画像の収差を補正する収差補正装置において、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることにより達成される。
【発明の効果】
【0013】
本発明によれば、光学レンズにより生じる画像の倍率色収差、歪曲収差、それらの両方の収差の補正を、1つの回路で一括して行うことができ、これにより、高価なレンズを使用しなくても、光学レンズにより生じる画像の倍率色収差、歪曲収差のそれぞれを単独に、また、倍率色収差、歪曲収差の両方をリアルタイムに補正して、高級レンズを使用したと同等以上の画質を持った画像を得ることができる。
【図面の簡単な説明】
【0014】
【図1】レンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とを示す図である。
【図2】本発明の一実施形態による収差補正装置の構成を示すブロック図である。
【図3】本発明の実施形態で扱う画面構成の例を示す図である。
【図4】倍率色収差の例を説明する図である。
【図5】図1で説明した歪曲収差を持つ画像を歪みのない画像に補正する例を説明する図である。
【図6】倍率色収差及び歪曲収差による画素の位置座標のずれの補正について説明する図である。
【図7】歪み補正パラメータテーブルに格納されている倍率色収差及び歪曲収差補正パラメータの構成例を説明する図である。
【図8】レンズパラメータテーブルの構成を説明する図である。
【図9】補間演算回路での補間演算の例を説明する図である。
【発明を実施するための形態】
【0015】
以下、本発明による収差補正装置の実施形態を図面により詳細に説明する。
【0016】
図1はレンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とを示す図であり、本発明によるに収差補正装置の実施形態を説明する前に、まず、図1を参照してレンズによる倍率色収差の発生原理と歪曲収差が発生した画像の例とについて説明する。
【0017】
図1(a)は倍率色収差の発生原理を説明する図である。レンズの色収差には、軸上色収差と倍率色収差とがある。軸上色収差は、光の波長による結像点をズレさせる収差である。前述の倍率色収差は、光の波長によって像の倍率を異ならせる収差、すなわち、色によって像の大きさを異ならせるような収差である。この倍率色収差による結像点のズレ量は、一般に、レンズパラメータ(ズーム、フォーカス、アイリス(絞り))によって異なる。
【0018】
図1(a)には、1枚のレンズによる倍率色収差の例を示しており、レンズの光の波長による屈折率違いにより、1点からのR、G、Bの各色の像が、異なった位置に結像してしまうことを示している。
【0019】
図1(b)は歪曲収差が発生した画像の例を示す図である。レンズの歪曲収差は、主に、樽型歪みと呼ばれる収差と、糸巻き型歪みと呼ばれる収差とがある。樽型歪みは、図1(b)の左側に示すように、画像の上下、左右の中央部が膨らむ歪みであり、糸巻き型歪みは、図1(b)の右側に示すように、画像の上下、左右の中央部が凹む歪みである。
【0020】
図2は本発明の一実施形態による収差補正装置の構成を示すブロック図、図3は本発明の実施形態で扱う画面構成の例を示す図である。図2に示す本発明による収差補正装置の実施形態は、倍率色収差及び歪曲収差を補正することができるようにした倍率色収差及び歪曲収差補正装置の例である。
【0021】
図2に示す収差補正装置は、CPU、主メモリ、HDD等による記憶装置、入出力装置を備えて構成される図示していない情報処理装置の中に構築されるもである。そして、図2に示す収差補正装置は、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路21、画素B収差補正回路22、画素R収差補正回路23及び画面アドレスカウンタ27を備えて構成され、これらの機能部は、情報処理装置内の主記憶装置の中に構成されており、CPUにより制御されて本発明の実施形態での動作が行われることになる。
【0022】
各画素収差補正回路21〜23のそれぞれは、入力される各色信号毎の画素G、B、R信号が入力されて画像イメージデータの全て(1枚の画面の全データ)またはその一部を一時的に保持する複数行のラインメモリで構成されるバッファメモリ25、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正したデータを保持している歪み補正パラメータテーブル24、各画素の画素値を補正する補間演算回路26により構成される。
【0023】
本発明の実施形態で扱う画面は、画像を構成する最小単位の画素(G、B、R)が水平方向、垂直方向に配置されて構成される。そして、画面アドレスカウンタ27は、前述の画面における水平方向の画素アドレス、垂直方向の画素アドレスを示すためのもので、水平方向の画素数カウンタと垂直方向のライン数カウンタとにより構成される。
【0024】
画面アドレスカウンタ27には、ピクセルクロック信号、水平同期信号、垂直同期信号が加えられる。前述の水平方向の画素数カウンタは、ピクセルクロック信号が1つ入力される毎に1加算される。また、垂直方向のライン数カウンタは、水平同期信号が1つ入力される毎に1加算される。そして、水平方向の画素数カウンタは、水平同期信号が1つ入力される毎に初期状態にクリアされ、また、垂直方向ライン数カウンタは、該カウンタが画面構成の垂直方向の画素数をカウントしたときに初期状態にクリアされる。
【0025】
各画素の位置歪み(位置ずれ)を補正するデータを保持している歪み補正パラメータテーブル24の内容を設定しているレンズパラメータには、レンズ位置等の設定状態を示すもので、ズーム、フォーカス、アイリス(絞り)等がある。このレンズ位置等の設定状態は、数値化されて歪み補正パラメータテーブル24に格納されている。このような歪み補正パラメータテーブル24は、指定されたレンズパラメータに対応して選択されるので、複数のテーブルが用意されている。
【0026】
画素G、画素B、画素Rの各信号入力は、対応する画素収差補正回路21〜23のそれぞれに入力される。
【0027】
以下、画素G収差補正回路21の動作について説明するが、画素B、画素Rの画素収差補正回路22、23も同様である。
【0028】
画素G信号入力として画素G収差補正回路21に入力される画素G入力信号は、画面アドレスカウンタ27が指定するバッファメモリ25の水平方向、垂直方向の画素位置に記録される。
【0029】
本発明の実施形態では、前述したような画像信号の入力の処理と並行して、収差補正の処理が行われる。次に、本発明の実施形態での収差補正の処理を説明する。
【0030】
収差補正の処理において、構成の詳細を後述する歪み補正パラメータテーブル24には、画面アドレスカウンタ27からの画面座標が入力される。そして、補正パラメータテーブル24からは、画面アドレスカウンタ27から入力された画面座標の画素に対する倍率色収差及び歪曲収差を補正した補正後の座標値が読み出され、この座標値に従ってバッファメモリ25から対応する画素の画素値が読み出される。しかし、補正後の座標値は、画面座標の交点に収まらないものであるため、読み出された座標値の近傍の複数の座標の画素の画素値が読み出されて補間演算回路26に入力され、補間演算回路26により所望の画素値が求められて、画面アドレスカウンタ27から入力された画面座標の画素値として出力される。説明している例では、補間演算回路26で求められた所望の画素値は、画素G信号出力として出力されることになる。
【0031】
本発明の実施形態で扱う画面は、図3に示す画面構成の例のように、画像を構成する最小単位のピクセルと呼ぶ画素(G、B、R)により構成され、ピクセルの座標は、水平方向座標、垂直方向座標で表されるものとする。
【0032】
図3に示す例は、解像度2,073,600ピクセルの画面座標例を示しており、水平方向ピクセル座標0〜1919、垂直方向ピクセル座標0〜1079により構成される。本発明の実施形態では、水平方向ピクセル座標m、垂直方向ピクセル座標nの画素座標をPmnで表し、水平方向ピクセル座標m’、垂直方向ピクセル座標n’の画素座標をPm’n’で表すものとする。
【0033】
図4は倍率色収差の例を説明する図である。図4(a)は画面中央付近にある座標Pmnの画素(G、B、R)を示したもので、基準座標Pmnに対して画素G、画素B、画素Rのズレ量が少ない。図4(b)は画面の端面近くにある座標Pm’n’の画素(G、B、R)を示したもので、基準座標Pm’n’に対して画素G、画素B、画素Rのズレ量が大きくなっている。本発明の実施形態において、基準座標Pm’n’に対して、画素Gの水平方向のズレ量をx1、垂直方向のズレ量をy1で示すこととする。同様に、画素Bの水平方向のズレ量をx2、垂直方向のズレ量をy2で示し、画素Rの水平方向のズレ量をx3、垂直方向ズレ量をy3で示すこととする。
【0034】
図5は図1で説明した歪曲収差を持つ画像を歪みのない画像に補正する例を説明する図である。
【0035】
図1によりすでに説明したように、光学系レンズの代表的な歪曲収差には樽型歪曲収差、糸巻き型歪曲収差とがあり、図5の左側に再度示している。このような歪みを受けた画像は、例えば、その画像がCCDまたはCMOSデバイスにより取り込まれた場合、これらのデバイスに取り込まれた画素の画素位置と、本来あるべき画素位置とがずれることになる。本発明の実施形態では、図2に示す収差補正装置により、このような画素位置のずれを補正して、図5の右側に示しているような歪みのない画像を得るようにしたものである。
【0036】
図6は倍率色収差及び歪曲収差による画素の位置座標のずれの補正について説明する図である。図6には画面アドレスカウンタ27により指し示される本来あるべき画素位置Pmnにある画素が歪曲収差により画素位置Pxyに移動し、さらに、倍率色収差により、画素を構成する画素Gの座標位置がPx+x1,y+y1 に移動し、画素Rの座標位置がPx+x2,y+y2 に移動し、画素Bの座標位置がPx+x3,y+y3 に移動したものとして示している。
【0037】
図6に示した例のような場合、倍率色収差及び歪曲収差による画素の位置座標のずれの補正座標は、以下に示すように求めることができる。すなわち、
画面座標Pmnの歪曲収差補正座標(=Pxy)は、
Pxy=Pm+m1,n+n1
として求めることができ、また、
歪曲座標補正後の画面座標Pxyの倍率色収差の補正座標は、
座標Pxyの画素Gの補正座標=Px+x1,y+y1
座標Pxyの画素Rの補正座標=Px+x2,y+y2
座標Pxyの画素Bの補正座標=Px+x3,y+y3
として求めることができる。
【0038】
従って、画面座標Pmnの歪曲収差及び倍率色収差の補正座標は、
座標Pmnの画素Gの補正座標=Pm+m1+x1,n+n1+y1
座標Pmnの画素Rの補正座標=Pm+m1+x2,n+n1+y2
座標Pmnの画素Bの補正座標=Pm+m1+x3,n+n1+y3
として求めることができる。
【0039】
図7は歪み補正パラメータテーブルに格納されている倍率色収差及び歪曲収差補正パラメータの構成例を説明する図である。
【0040】
倍率色収差及び歪曲収差補正パラメータは、図7に示すように、画面座標、画素Gの収差補正座標、画素Bの収差補正座標、画素Rの収差補正座標のデータにより構成される。そして、図示テーブル内の各画面座標は、垂直方向座標と水平方向座標とにより構成され、画面アドレスカウンタ27により指定される整数値であり、図6により説明した画面座標Pmnを示している。
【0041】
画素(G、B、R)の収差補正座標は、画面座標Pmnに示されるピクセル単位に設定された少数点を含む数値となるが、処理における論理演算を簡単にするため、2進数で示す整数部と、2進数で示す小数部とにより表現されている。この収差補正パラメータは、必ずしもピクセル単位に設定する必要はなく、画面を複数のゾーンに分けてゾーン単位に補正パラメータを設定するように構成することもできる。
【0042】
前述から判るように、図2に示す画面アドレスカウンタ27の値が図7に示しているテーブルの水平方向座標、垂直方向座標に対応し、画面アドレスカウンタ27の値で示されるテーブルの画面座標に対応する画素(G、B、R)の収差補正座標が読み出されることになる。
【0043】
図8はレンズパラメータテーブルの構成を説明する図である。
【0044】
レンズの物理的な設定値を示すレンズパラメータとしては、ズーム、フォーカス、アイリス(絞り)等がある。例えば、ズームレンズは、広角〜望遠まで変化するものであるので、その設定を数値(カウント値)で表現した複数のズームカウント値で示すものとする。そして、このズームカウント値を横軸方向に配置する。また、フォーカス、または、アイリスについても、複数の設定を数値(カウント値)で表現したフォーカスカウント値、または、アイリスカウント値で示すものとする。そして、このフォーカスカウント値、または、アイリスカウント値を縦軸方向に配置する。
【0045】
なお、前述したズームカウント値は、ズームレンズを構成するレンズ間距離に対応して数値化された値であり、通常、よく利用されているものである。
【0046】
図8に示すレンズパラメータテーブルは、前述したズームカウント値とフォーカスカウント値、または、アイリスカウント値との交点のそれぞれに倍率色収差及び歪曲収差補正パラメータをレンズパラメータとして配置したものとなる。図8の例の場合、レンズパラメータテーブルは、横軸方向にズームのカウント値を示す設定ポイントを0〜hまで配置し、縦軸方向にフォーカス、または、アイリスのカウント値を示す設定ポイントを0〜vまで配置しているのて、(1+h)×(1+v)の倍率色収差及び歪曲収差補正パラメータのレンズパラメータが用意されているものとする。
【0047】
図8において、例えば、ズームカウント値=h、フォーカスカウント値=vのレンズパラメタテーブルはTvhであり、ズームカウント値=0、フォーカスカウント値=0のレンズパラメタテーブルはT00である。このため、図8に示す例の場合、レンズパラメータT00〜Tvhのレンズパラメータテーブルがあることになる。これらのレンズパラメータテーブルの内容は、図7に示して説明した倍率色収差及び歪曲収差補正パラメータそのものである。
【0048】
従って、図2に示して説明した本発明の実施形態による収差補正装置は、収差補正処理の開始時にレンズパラメータが入力されると、図8により説明したレンズパラメータテーブルT00〜Tvhの1つが選択されて使用されることになる。
【0049】
前述で説明した図8に示すレンズパラメータテーブルは、縦軸方向にフォーカス(またはアイリス)のカウント値を示す設定ポイントを0〜vまで配置するとしている。前述したように、レンズパラメータとしては、ズーム、フォーカス、アイリス(絞り)があるので、3つのパラメータのカウント値の組み合わせ毎にレンズパラメータテーブルを用意することも可能であるが、このようにするとレンズパラメータテーブルの数が極めて多数となってしまうので、本発明の実施形態では、縦軸方向にフォーカス、または、アイリスのカウント値を用いることとしている。
【0050】
図9は補間演算回路26での補間演算の例を説明する図である。補間演算としては、近傍4画素から目的の画素値を求める双一次補間(バイリニア補間)、近傍16画素から目的の画素値を求める双三次補間(バイキュービック補間)等が知られている。
【0051】
図9(a)に示す双一次補間(バイリニア補間)の例は、補正座標値P(u,v) の画素値を求める場合、補正座標値P(u,v) の周辺の座標P22、P23、P32、P33の画素の画素値から補正座標値P(u,v) の画素値を求めている例である。また、図9(b)に示す双三次補間(バイキュービック補間)の例は、補正座標値P(u,v) の画素値を求める場合、補正座標値P(u,v) の周辺の16画素、すなわち、座標P11〜P44の16の画素の画素値から補正座標値P(u,v) の画素値を求めている例である。これらの補間演算の方法は、公知の方法であるので、ここでの説明を省略する。
【0052】
前述した本発明の実施形態によれば、基準座標に対する画素G、画素B、画素Rの全てのズレ量をパラメータとして用いているので、光学系レンズ(ズームレンズ、単焦点レンズ)の倍率色収差の補正だけでなく、歪曲収差の補正をも行うことができ、また、倍率色収差及び歪曲収差を合わせて同時に補正することができる。
【0053】
前述した本発明の実施形態によれば、撮像管の電磁偏向特性ばらつきによる色ズレ補正、3個の撮像デバイス(CCD、CMOS等)、または、撮像管(HARP等)で構成する場合の画素G、B、Rの位置ズレによる色ズレの補正を行うことができる。
【0054】
例えば、3枚の撮像デバイス(CCD、CMOSなど)で画像のカラー化を行う場合、撮像デバイスの取付け誤差の影響で画素G、画素B、画素Rの色ズレが発生するが、前述した本発明の実施形態によれば、このズレ量を歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることにより位置ズレ補正が可能となり、倍率色収差、歪曲収差の両方を合わせた微妙な位置ズレの補正行うことが可能である。
【0055】
また、三原色を3本の撮像管(HARPデバイス等)で撮影してカラー画像を構成する場合、撮像管G、撮像管B、撮像管Rの電子ビームを走査させる電磁偏向系の特性のばらつきにより、画素G、画素B、画素Rの色ズレが発生する問題があるが、前述した本発明の実施形態によれば、前述の色ズレ量を歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることにより倍率色収差、歪曲収差、位置ズレの補正に合わせて電磁偏向特性のばらつきの補正をも行うことが可能である。
【0056】
また、従来、高価なレンズの比較的歪みの少ない中央部分の画像を使用していたが、前述した本発明の実施形態によれば、廉価なレンズの収差(倍率色収差、歪曲収差など)を補正して、高性能レンズに匹敵する性能を確保することができる。これにより、組レンズの枚数を少なくすることができるので、価格低減効果だけでなくレンズ枚数を少なくすることにより明るさの向上を図ることができる。
【0057】
さらに、従来、3枚の撮像デバイスの位置ズレに伴う色ズレ補正は手作業に頼っているのが一般的であるが、前述した本発明の実施形態によれば、前述のような3枚の撮像デバイスの位置ズレに伴う色ズレ補正をデジタル的に自動調整を行うことが可能で、調整を容易に行うことができる。
【0058】
前述した本発明の実施形態は、光学系レンズを使用して構成されている製品であるビデオカメラ、一眼レフカメラ、デジタルカメラ、プロジェクタ等に応用可能であり、また、電磁偏向走査の撮像管を用いて構成されている製品である超高感度HARPカメラ等にも応用可能である。
【0059】
また、前述した本発明の実施形態は、3個(または複数)の撮像デバイスを使用して三原色の画素G、画素B、画素Rを表現することにより画像をカラー化する製品の色ズレ補正に応用することができる。
【符号の説明】
【0060】
21 画素G収差補正回路
22 画素B収差補正回路
23 画素R収差補正回路
24 歪み補正パラメータテーブル
25 バッファメモリ
26 補間演算回路
27 画面アドレスカウンタ
【特許請求の範囲】
【請求項1】
光学レンズにより生じる画像の収差を補正する収差補正装置において、
三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、
前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることを特徴とする収差補正装置。
【請求項2】
前記歪み補正パラメータテーブルが保持する位置座標データは、倍率色収差、歪曲収差、あるいは、それらの両方を補正した補正後の位置座標データであることを特徴とする請求項1記載の収差補正装置。
【請求項3】
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、補間演算回路をさらに備え、該補間演算回路は、前記バッファメモリから前記補正後の座標値に対応する画素の画素値が読み出される際に、前記補正後の座標値に対応する画素の周辺の複数の画素の画素値を用いて画素値を補正して出力することを特徴とする請求項1または2記載の収差補正装置。
【請求項4】
前記歪み補正パラメータテーブルは、ズームカウント値と、フォーカスカウント値またはアイリスカウント値との組み合わせによるレンズパラメータに対応して備えられていることを特徴とする請求項1、2または3記載の収差補正装置。
【請求項5】
CCDまたはCMOSによる3枚の撮像デバイスで画像のカラー化を行う際の撮像デバイスの取付け誤差の影響により生じる画素G、画素B、画素Rの色のズレ量を補正するように、前記歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることを特徴とする請求項1ないし4のうちいずれか1記載の収差補正装置。
【請求項6】
三原色を3本の撮像管で撮影して画像のカラー化を行う際の撮像管G、撮像管B、撮像管Rの電子ビームを走査させる電磁偏向系の特性のばらつきにより生じる画素G、画素B、画素Rの色のズレ量を補正するように、前記歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることを特徴とする請求項1ないし4のうちいずれか1記載の収差補正装置。
【請求項7】
光学レンズにより生じる画像の収差を補正する収差補正装置における収差補正方法において、
前記収差補正装置は、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、
前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることを特徴とする収差補正方法。
【請求項1】
光学レンズにより生じる画像の収差を補正する収差補正装置において、
三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、
前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることを特徴とする収差補正装置。
【請求項2】
前記歪み補正パラメータテーブルが保持する位置座標データは、倍率色収差、歪曲収差、あるいは、それらの両方を補正した補正後の位置座標データであることを特徴とする請求項1記載の収差補正装置。
【請求項3】
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、補間演算回路をさらに備え、該補間演算回路は、前記バッファメモリから前記補正後の座標値に対応する画素の画素値が読み出される際に、前記補正後の座標値に対応する画素の周辺の複数の画素の画素値を用いて画素値を補正して出力することを特徴とする請求項1または2記載の収差補正装置。
【請求項4】
前記歪み補正パラメータテーブルは、ズームカウント値と、フォーカスカウント値またはアイリスカウント値との組み合わせによるレンズパラメータに対応して備えられていることを特徴とする請求項1、2または3記載の収差補正装置。
【請求項5】
CCDまたはCMOSによる3枚の撮像デバイスで画像のカラー化を行う際の撮像デバイスの取付け誤差の影響により生じる画素G、画素B、画素Rの色のズレ量を補正するように、前記歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることを特徴とする請求項1ないし4のうちいずれか1記載の収差補正装置。
【請求項6】
三原色を3本の撮像管で撮影して画像のカラー化を行う際の撮像管G、撮像管B、撮像管Rの電子ビームを走査させる電磁偏向系の特性のばらつきにより生じる画素G、画素B、画素Rの色のズレ量を補正するように、前記歪補正パラメータテーブルの画素G、画素B、画素Rの補正パラメータに反映させることを特徴とする請求項1ないし4のうちいずれか1記載の収差補正装置。
【請求項7】
光学レンズにより生じる画像の収差を補正する収差補正装置における収差補正方法において、
前記収差補正装置は、三原色G、B、Rの各画素の収差を補正する画素G収差補正回路と、画素B収差補正回路と、画素R収差補正回路と、ピクセルクロック信号、水平同期信号、垂直同期信号が入力される画面アドレスカウンタとを備え、
前記三原色G、B、Rの各画素収差を補正する画素G収差補正回路、画素B収差補正回路、画素R収差補正回路のそれぞれは、入力される各色信号毎の画素信号が入力されて画像イメージデータを保持するバッファメモリと、レンズパラメータに対応して各画素の位置歪み(位置ずれ)を補正した位置座標データを保持している歪み補正パラメータテーブルとを備えて構成され、
前記歪み補正パラメータテーブルには、前記画面アドレスカウンタからの画面座標が入力され、前記歪み補正パラメータテーブルから入力された画面座標の画素に対する収差を補正した補正後の座標値が読み出され、該読み出された座標値に従って前記バッファメモリから対応する画素の画素値が読み出されて、画面アドレスカウンタから入力された画面座標の画素値として出力されることを特徴とする収差補正方法。
【図1】


【図2】
【図3】
【図5】
【図7】
【図8】
【図9】
【図4】
【図6】
【図2】
【図3】
【図5】
【図7】
【図8】
【図9】
【図4】
【図6】
【公開番号】特開2011−61444(P2011−61444A)
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願番号】特願2009−208298(P2009−208298)
【出願日】平成21年9月9日(2009.9.9)
【出願人】(000233295)日立情報通信エンジニアリング株式会社 (195)
【Fターム(参考)】
【公開日】平成23年3月24日(2011.3.24)
【国際特許分類】
【出願日】平成21年9月9日(2009.9.9)
【出願人】(000233295)日立情報通信エンジニアリング株式会社 (195)
【Fターム(参考)】
[ Back to top ]