
収納システム
【課題】収納室内に複数の物品を分けて収納する場合は、収納室内の各場所に何を収納したか分からなくなることも多く、納室内から所望の物品を取り出す際には、収納室内を探し回らないといけない場合もあった。
【解決手段】本発明の収納システムにおいて、選択受付部2により利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持され、選択受付部2からの要求に応じて選択候補の画像情報104として選択受付部2に送信される。
【解決手段】本発明の収納システムにおいて、選択受付部2により利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持され、選択受付部2からの要求に応じて選択候補の画像情報104として選択受付部2に送信される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、住宅内に設けた収納室に可動コンテナを配置して、住宅内の被収納物を収納管理する住宅の収納システムに関する。
【背景技術】
【0002】
住宅内において、居室のスペースが物品で占有されないように、収納室を設けることが一般的に行われている。収納室は、住宅の1階と2階の間などの狭い空間に設けられ、屈んで収納の作業を行わなければならない場合が多い。
【0003】
そこで、例えば特許文献1では、収納室への物品の出し入れの作業負担を軽減する収納室構造が提案されている。当該文献においては、被収納物を収納室内において円滑に移動させるための収納物移動体(例えば、収納ワゴン)や作業者が座って収納物移動体を牽引するための牽引車などが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−100376
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、収納室内に複数の物品を分けて収納する場合は、収納室内の各場所に何を収納したか分からなくなることも多く、納室内から所望の物品を取り出す際には、収納室内を探し回らないといけない場合もあった。
【課題を解決するための手段】
【0006】
以上の課題を解決するために、本発明は、住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理する住宅の収納システムであって、可動コンテナを収納室と居室の間で移動させる自走式移動ロボットと、可動コンテナに被収納物を収容し、居室から収納室内に可動コンテナを移動させる際に、可動コンテナ内の収容状況を撮影する撮影部と、荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する荷物画像保持部と、荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける選択受付部と、選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する命令出力部と、を有する収納システムを提案する。
【発明の効果】
【0007】
以上のような構成をとる本発明により、利用者は収納室内の各可動コンテナにて収容されている物品を容易に把握することが可能になる。また、自走式移動ロボットが所望の可動コンテナを収納室内から居室まで移動させるため、利用者の作業負担をさらに軽減することが可能になる。
【図面の簡単な説明】
【0008】
【図1】実施形態1の住宅の収納システムのシステム概要を示す図
【図2】実施形態1の住宅の収納システムの機能ブロック図
【図3】可動コンテナの外形の一例を示す図
【図4】自走式移動ロボットの外形の一例を示す図
【図5】荷物画像保持部にて保持される情報の一例を示す図
【図6】自走式移動ロボットのハードウェア構成の一例を示す図
【図7】撮影部のハードウェア構成の一例を示す図
【図8】実施形態1の収納システムの収納処理の流れの一例を示す図
【図9】可動コンテナの移動手順の決定処理の流れの一例を示す図
【図10】選択された一つの可動コンテナを収納室から移動させる様子を示す図
【図11】選択された二つの可動コンテナを収納室から移動させる様子を示す図
【図12】実施形態2の住宅の収納システムのシステム概要を示す図
【図13】実施形態2の住宅の収納システムの機能ブロック図
【図14】荷物画像保持部にて保持される情報の一例を示す図
【図15】収納システムの画像の検索処理の流れの一例を示す図
【発明を実施するための形態】
【0009】
以下に、本発明の実施例を説明する。実施形態と請求項の相互の関係は、以下のとおりである。実施形態1は主に請求項1、3、4に関し、実施形態2は主に請求項2、3、4に関する。なお、本発明はこれらの実施形態に何ら限定されるものではなく、その要旨を逸脱しない範囲内において、様々な態様で実施しうる。
【0010】
<<実施形態1>>
【0011】
<システムの概要>
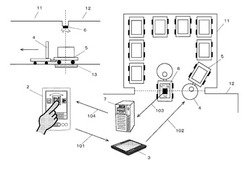
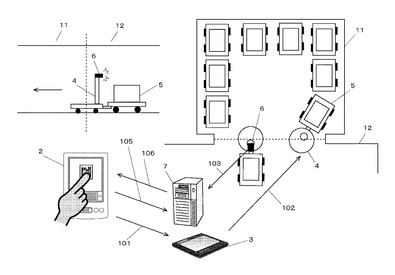
図1は、本実施形態の住宅の収納システムのシステム概要を示す図である。この収納システムにおいて、選択受付部2により利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持され、選択受付部2からの要求に応じて選択候補画像104として選択受付部2に送信される。
【0012】
<システムの構成>
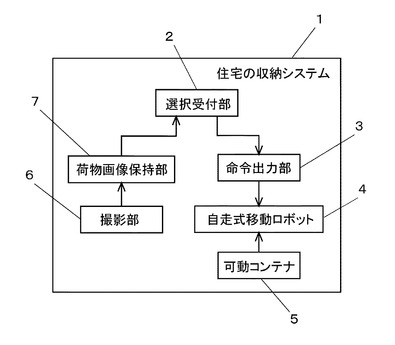
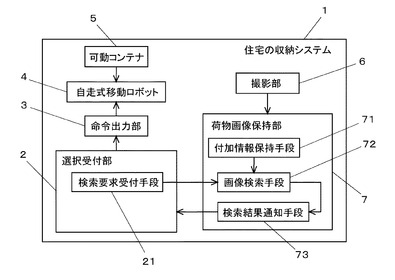
図2は、本実施形態の「住宅の収納システム」の機能構成を示す図である。この図にあるように、「住宅の収納システム」1は、「選択受付部」2と、「命令出力部」3と、「自走式移動ロボット」4と、「可動コンテナ」5と、「撮影部」6と、「荷物画像保持部」7と、から構成される。以下、各構成の機能について説明する。
【0013】
(住宅の収納システムの機能)
「住宅の収納システム」は、住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理するシステムである。ここで、住宅とは、人の居住を用途とする建築物であって、個人住宅や集合住宅などのことをいうものである。また、収納室とは、物品の収納を用途とする部屋である。また、被収納物とは収納室に収納される物品のことをいう。
【0014】
(可動コンテナの機能)
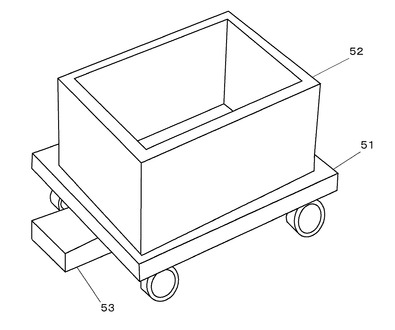
「可動コンテナ」は、可動性を有するコンテナのことである。ここで、可動コンテナは、自走する機能を備えていてもよいが、自走式移動ロボットによって牽引可能なものであれば足りる。図3は、「可動コンテナ」の外形の一例を示す図である。この図の例では、「可動コンテナ」は、上面に物体を載置可能な「台車」51と当該台車に載置された「コンテナ」52などから構成される。また、上記台車は、自走式移動ロボットの牽引部材と連結するための「連結部材」53を備えている。なお、可動コンテナは上記構成に限定されるものではなく、例えばコンテナそのものに車輪が付いた構成なども可能である。
【0015】
なお、可動コンテナは、天井方向から荷物の収容状況の画像を撮影する場合は上面の全部又は一部が開口可能な構成とすることが好ましい。また、水平方向から荷物の収容状況の画像を撮影する場合は横側面の全部又は一部が開口可能な構成とすることが好ましい。
【0016】
また、可動コンテナは、自身のIDを保持するためのICタグを備える構成も可能である。この場合、自走式移動ロボットはICタグリーダによって各可動コンテナのIDを読みとり、所望の可動コンテナであるか否か判断する。
【0017】
なお、可動コンテナ自身が可動コンテナIDなどの情報をICタグなどの記憶手段により保持する必要は必ずしもなく、以下に示すように自走式移動ロボットなどが各可動コンテナの外観や位置などから各可動コンテナを判別してもよい。
【0018】
例えば、可動コンテナIDを示す文字、記号、数字等を各可動コンテナの外面に記載する構成が考えられる。この場合、自走式移動ロボットは、自身が備える撮影手段又は他の装置が備える撮影手段から得られる画像情報に基づいて各可動コンテナの可動コンテナIDを取得し、所望の可動コンテナであるか否か判断する。
【0019】
また、他の例として各可動コンテナの色や形状を異ならせる構成も可能である。この場合、自走式移動ロボットは、自身が備える撮影手段又は他の装置が備える撮影手段から得られる画像情報と、各可動コンテナのIDとその特徴(色、形状など)を関連付けたテーブルに基づいて、所望の可動コンテナであるか否か判断する。
【0020】
また、他の例として収納室内の各場所の識別子(区画番号、配列番号など)を各可動コンテナID(識別番号、識別記号など)と関連付ける構成も可能である。この場合、自走式移動ロボットは、収納室内における配置場所に基づいて所望の可動コンテナであるか否か判断する。なお、各可動コンテナの配置構成は特に限定されるものではなく、収納室内において壁に沿って配置する構成も可能であるし、壁から離れた位置にも合わせて配置する構成も可能である。
【0021】
収納室内の可動コンテナの数は固定的である必要はなく、必要に応じて増やしたり減らしたりすることも可能である。例えば、一の可動コンテナを収納室に追加する場合は、追加する可動コンテナのIDを利用者端末から命令出力部や自走式移動ロボットに通知し、命令出力部や自走式移動ロボットにおいて新しいレコードを管理情報として追加する。また、一の可動コンテナを収納室から除外する場合は、削除する可動コンテナのIDを利用者端末から命令出力部や自走式移動ロボット、荷物画像保持部に通知し、命令出力部や自走式移動ロボット、荷物画像保持部において関連するレコードを管理情報から削除する。
【0022】
(自走式移動ロボットの機能)
「自走式移動ロボット」は、可動コンテナを収納室と居室の間で移動させる機能を有する。ここで、自走式移動ロボットは、命令出力部から、特定の可動コンテナを収納室内から居室間に移動させるために一又は二以上の可動コンテナを動かす命令を受信し、当該命令に従って動作する。
【0023】
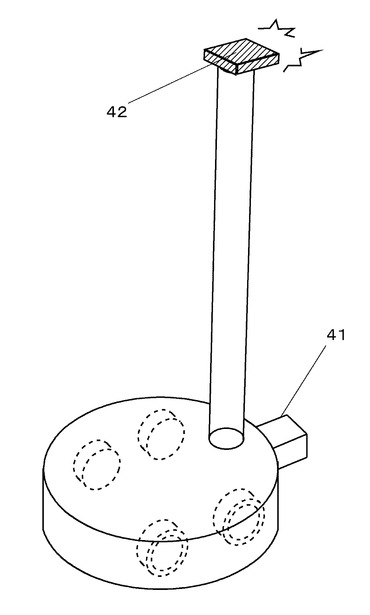
図4は、「自走式移動ロボット」の外形の一例を示す図である。自走式移動ロボットは、可動コンテナを牽引するための「牽引部材」41を備え、必要に応じて可動コンテナと自身を連結・分離することが可能である。ここで、牽引部材は、可動コンテナの連結部材と組み合う構成とすることも可能であるし、電流によって一時的に磁性を発生させて可動コンテナの磁石と引き合う構成とすることも可能である。この図の例では、自走式移動ロボットは可動コンテナの内部を上側から撮影する「撮影手段」42を備える。
【0024】
また、自走式移動ロボットは、各可動コンテナを牽引する際に慣性質量に比例する指数(慣性指数)を算出し、各可動コンテナIDと関連付けてその情報を保持したり、命令出力部や荷物画像保持部に送信したりする構成も可能である。ここで、慣性指数は、各可動コンテナを牽引する力を同一にした場合、可動コンテナを停止状態から所定速度までに加速するのに必要な時間に比例するため、当該必要時間に基づいて算出することが可能である。各可動コンテナの慣性指数は各可動コンテナにおいてどれくらの荷物が収容されているかの目安となり、命令出力部や自走式移動ロボットにおいて移動経路や移動手順を決定する際の判断要因として利用することができる。
【0025】
また、自走式移動ロボットは、上記のように、可動コンテナ内の収容状況などを撮影する「撮影部」を備える構成も可能である。当該撮影部は、必要に応じて自走式移動ロボットから取り外し可能な構成とすることも可能である。この場合、利用者は自走式移動ロボットから撮影部を取り外して、可動コンテナ内の収容状況を示す一又は複数の画像を撮影することができる。
【0026】
また、自走式移動ロボットは、操作入力手段や音声入力手段を備え、入力された情報を荷物画像保持部に送信したり、入力された情報に基づいて自身の動作を制御したりする構成も可能である。例えば、利用者は入力手段を利用して可動コンテナ内の収容状況を示す情報(収容した物品名、収納日時、収納者など)を入力し、荷物画像保持部にて可動コンテナIDと関連付けて保持させることができる。また、利用者は入力手段を利用して可動コンテナに対する収容が完了したことを通知し、自走式移動ロボットは収容完了通知に応じて可動コンテナを居室から収納室へ移動させることも可能である。
【0027】
また、自走式移動ロボットは、収納室内の各場所の温度や湿度、粉塵量、明るさ等を計測するセンサを備え、センサ情報を利用者端末(選択受付部)に送信したり、センサ情報に基づいて自身の動作を制御したりする構成も可能である。当該構成とすることにより、利用者は利用者端末において収納室内の温度や湿度などを確認することができる。また、自走式移動ロボットは、収納室内の環境条件(温度、湿度など)及び被収納物の種別(許容温度、許容湿度など)に応じて、アラーム音を出力したり、所定の可動コンテナの位置を移動させたりすることも可能になる。
【0028】
また、自走式移動ロボットは、収納室内のフロアの埃やゴミ等を吸引したり、収納室内の空気を取り込んでフィルタに通し、空気中の埃やゴミ等を取り除いたりする機能を備える構成も可能である。また、自走式移動ロボットは、上記で説明したセンサから得られる粉塵量に応じて掃除動作を開始する構成も可能である。
【0029】
(撮影部の機能)
「撮影部」は、可動コンテナに被収納物を収納した後に可動コンテナ内の収容状況を撮影する機能を有する。また、撮影部は、撮影した荷物収容状況の画像を有線又は無線の通信手段を利用して荷物画像保持部に送信する。
【0030】
撮影部の全部又は一部は、図4に示したように前記自走式移動ロボットに備え付ける構成も可能であるし、図1に示したように前記収納室の出入口の天井付近に配置する構成も可能である。
【0031】
また、撮影部は、自走式移動ロボット又は命令出力部から撮影命令を受信し、当該命令に応じて可動コンテナ内の収容状況を撮影する構成が考えられる。例えば、自走式移動ロボットは利用者から可動コンテナに対する収容完了通知を受け付けた後、撮影部に対して収容状況を撮影するための命令を送信し、撮影部は当該命令に応じて可動コンテナ内の収容状況を撮影する。また、撮影部に操作入力手段を設け、利用者による操作入力に応じて可動コンテナ内の収容状況を撮影する構成も可能である。
【0032】
また、他の例として、命令出力部は利用者端末(選択受付部)から撮影指示を受け付けた際に、撮影部に対して収容状況を撮影するための命令を送信し、撮影部は当該命令に応じて可動コンテナ内の収容状況を撮影する。
【0033】
なお、撮影部は、撮影命令を受信した直後のタイミングにおいて可動コンテナ内の収容状況を撮影することも可能であるし、撮影命令に撮影タイミングが指定されている場合はタイマによって時間をカウントして撮影することも可能である。また、収納室の出入口の天井付近に配置された撮影部は、可動コンテナが撮影領域(出入口付近)に入ったことをカメラで検知して撮影することも可能である。この場合、可動コンテナの移動方向をさらに取得して、移動方向に応じて撮影するか否かを決定してもよい。例えば、可動コンテナが収納室に入場する場合は撮影し、収納室から退場する場合は撮影しない、といったものである。
【0034】
(荷物画像保持部の機能)
「荷物画像保持部」は、荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する機能を有する。ここで、荷物収容状況の画像及び可動コンテナIDは撮影部から有線又は無線の通信手段を利用して受信する。なお、可動コンテナIDは撮像部に対して撮像命令を送信する命令出力部や自走式移動ロボットから受信してもよい。
【0035】
荷物画像保持部は、住宅内のネットワーク上にあるデータサーバであってもよいし、外部のネットワーク(インターネット)上にあるデータサーバであってもよい。また、荷物画像保持部は、利用者端末からの要求に応じて内部に保持される画像情報を利用者端末(選択受付部)に送信することが可能である。
【0036】
荷物画像保持部は、例えば図5に示すように、荷物収容状況の画像の識別子(ファイル名など)とその荷物を収容している可動コンテナIDをテーブル情報として保持する。一の可動コンテナに対して追加的に物品の収容を行った場合であってもその都度荷物収容状況の画像が撮影されるため、コンテナの下側部分に何が埋もれているかについても把握することが可能である。
【0037】
なお、一の可動コンテナが収納室から除外された場合は、当該可動コンテナのIDを利用者端末から受信して、当該可動コンテナIDに関連付けられたレコードを荷物画像保持部から削除する構成も可能である。また、利用者端末から特定の画像の削除要求を受信した場合は、当該画像のデータを荷物画像保持部から削除する構成も可能である。
【0038】
(選択受付部の機能)
「選択受付部」は、荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける機能を有する。ここで、選択受付部は、荷物収容状況の画像の選択を受け付けるために、荷物画像保持部から選択候補となる一又は複数の荷物収容状況の画像を取得し、表示手段により表示する。また、利用者から操作入力手段を介して選択された荷物収容状況の画像に関連付けられた可動コンテナIDを命令出力部に対して送信する。
【0039】
なお、選択受付部にて受け付ける画像の選択数は一つである必要はなく、複数の画像の選択を連続して受け付けることも可能である。ここで、選択された複数の画像が同一の可動コンテナに関するものであれば命令出力部に対して一の可動コンテナIDを送信すればよいが、複数の可動コンテナに関するものであれば命令出力部に対して複数の可動コンテナIDを送信することになる。
【0040】
(命令出力部の機能)
「命令出力部」は、選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する機能を有する。
【0041】
命令出力部は、選択受付部から選択された可動コンテナIDを受信し、当該可動コンテナIDの情報を含む移動命令を自走式移動ロボットに対して送信する。
【0042】
また、命令出力部は、選択された可動コンテナを収納室内の配置場所から居室までどのようなルートで移動させるか、又は居室から収納室の配置場所までどのようなルートで移動させるかを特定する処理を行い、当該移動ルートの情報を移動命令に含めて自走式移動ロボットに対して送信する構成も可能である。ただし、当該移動ルートの特定処理は、自走式移動ロボットにて行う構成とすることも可能である。
【0043】
また、命令出力部は、選択された可動コンテナを居室へ移動させるために、収納室内にて位置をずらす必要のある他の可動コンテナを特定する処理を行い、当該他の可動コンテナのIDを移動命令に含めて自走式移動ロボットに対して送信する構成とすることも可能である。ただし、当該他の可動コンテナIDの特定処理は、自走式移動ロボットにて行うことも可能である。
【0044】
荷物画像保持部、選択受付部、命令出力部を実現するためのソフトウェアプログラムは、同一のハードウェアによって実行される構成も可能である。例えば、利用者端末が選択受付部と命令出力部の両機能を備える構成も可能であるし、集中制御端末が荷物画像保持部と命令出力部の両機能を備える構成も可能である。
【0045】
なお、必須の構成ではないが、収納室又は居室の床面の一部に可動コンテナの重量を検知する床面重量検知部を設けることも可能である。例えば図1に示すように、収納室の出入口付近に床面検知部13を設けることが考えられる。また、自走式移動ロボットが可動コンテナの動きにくさ(慣性質量等)を検知する慣性検知部を備える構成も可能である。これらの検知部にて検知された情報は、荷物画像保持部や選択受付部、命令出力部、自走式移動ロボット等に送信される。
【0046】
<具体的な構成>
(自走式移動ロボットの具体的な構成)
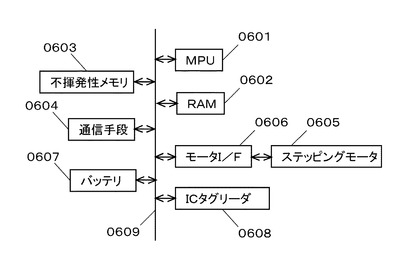
図6は、自走式移動ロボットのハードウェア構成の一例を示す図である。この図の例では、自走式移動ロボットは、「MPU」0601、「RAM」0602、「不揮発性メモリ」0603、「通信手段」0604、「ステッピングモータ」0605、「モータI/F」0606、「バッテリ」0607、「ICタグリーダ」0608、「システムバス」0609などから構成される。
【0047】
不揮発性メモリには、ステッピングモータを制御するためのプログラム、他の装置と通信I/Fを介して通信を行うための通信プログラム、所定位置に配置された可動コンテナを目的場所まで移動させるルートを決定するプログラムや、収納室内の壁や出入口の位置などを示すマップ情報、各可動コンテナが配置場所を示す可動コンテナ配置情報、などが格納されており、必要に応じてRAMに読み出される。
【0048】
また、通信手段は、命令出力部から自走式移動ロボットに対する命令情報を受信したり、自走式移動ロボットから撮影部に対する撮影命令の情報を送信したりする。また、バッテリは、MPUやステッピングモータなどを駆動するための電力を供給することが可能であり、必要に応じて充電することが可能である。バッテリに対する充電は、自走式移動ロボットが収納室内の所定の場所に設置された充電ポートに移動して自動的に行う構成も可能であるし、利用者によって適宜行われる構成も可能である。
【0049】
ICタグリーダは、可動コンテナが備えるICタグからその可動コンテナIDの情報を読み取ってMPUに送信する。MPUは、ICタグリーダから受信した可動コンテナIDに基づいて所望の可動コンテナであるか否か判断したり、可動コンテナの配置情報を更新したりする。
【0050】
(撮影部の具体的な構成)
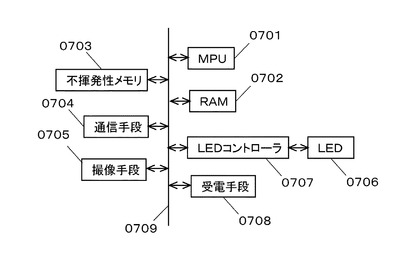
図7は、撮影部のハードウェア構成の一例を示す図である。この図の例では、撮影部は、「MPU」0701と、「RAM」0702、「不揮発性メモリ」0703、「通信手段」0704、「撮像手段」0705、「LED」0706、「LEDコントローラ」0707、「受電手段」0708、「システムバス」0709などから構成される。
【0051】
不揮発性メモリには、撮影命令に応じて撮影処理を実行するプログラムや、他の装置と通信手段を介して通信を行うためのプログラム、撮影した画像の情報などが格納されており、必要に応じてRAMに読み出される。
【0052】
また、通信手段は、自走式移動ロボットや命令出力部から撮影命令を受信したり、撮影部から荷物画像保持部に対して撮影した画像情報を送信したりする。また、受電手段は、MPUやレンズモータなどを駆動するための電力を住宅内電源又は自走式移動ロボットのバッテリなどから受電する。
【0053】
また、撮像手段は、入力された光信号をイメージセンサにて電気信号に変換し、A/D変換器にてアナログ信号からデジタル信号へ変換して、RAMへ出力する。MPUは、RAMの画像情報を可動コンテナIDと関連付けて不揮発性メモリに格納する。また、通信手段を介して荷物画像保持部へ可動コンテナIDと関連付けられた画像情報を送信する。また、LEDコントローラはMPUからの点灯指示に応じてLEDを点灯制御し、撮影時の明るさを調整する。
【0054】
(荷物画像保持部の具体的な構成)
荷物画像保持部の動作制御を実現するためのハードウェア構成としては、例えば「CPU」や「RAM」、「大容量記憶装置(ハードディスクドライブ等)」、「通信手段」、「操作入力手段」、「表示手段」、「受電手段」、「システムバス」などから構成される。当該構成は、一般的なサーバ装置の構成と同様である。
【0055】
大容量記憶装置には、荷物収容状況の画像をその荷物を収容している可動コンテナIDなどを関連付けて保持するためのプログラムや、可動コンテナIDを検索キーとした荷物収容状況の画像の検索要求を受け付けて検索するためのプログラム、可動コンテナIDと関連付けられた画像のデータなどが格納されており、必要に応じてRAMに読み出される。
【0056】
また、通信手段は、撮影部から荷物収容状況の画像の情報を受信したり、選択受付部に可動コンテナIDと関連付けた荷物収容状況の画像の情報を送信したりする。また、表示手段は荷物収容状況の画像や可動コンテナIDを一覧で表示することが可能である。また、操作入力手段は、荷物収容状況の画像の選択を受け付けたり、荷物収容状況の画像に付加する情報の修正・更新を受け付けたりする。
【0057】
(選択受付部の具体的な構成)
選択受付部の動作制御を実現するためのハードウェア構成としては、例えば、「CPU」や「RAM」、「不揮発性メモリ」、「通信手段」、「操作入力手段」、「表示手段」、「バッテリ」、「受電手段」、「システムバス」などが考えられる。当該構成は、一般的な利用者端末の構成と同様である。
【0058】
不揮発性メモリには、荷物収容状況の画像を表示手段に表示するためのプログラムや、荷物収容状況の画像の選択を操作入力手段にて受け付けるためのプログラム、他の装置と通信手段を介して通信するためのプログラムなどが格納されており、必要に応じてRAMに読み出される。
【0059】
また、通信手段は、荷物画像保持部から荷物収容状況の画像を受信したり、命令出力部に画像の選択結果の情報を送信したりする。また、表示手段は、荷物収容状況の画像や対応する可動コンテナIDを表示する。また、操作入力手段は、表示手段にて表示した荷物収容状況の画像の選択を受け付けたり、荷物収容状況の画像に付加すべき情報の入力を受け付けたりする。
【0060】
(命令出力部の具体的な構成)
命令選択部の動作制御を実現するためのハードウェア構成としては、例えば、「CPU」や「RAM」、「不揮発性メモリ」、「通信手段」、「受電手段」、「システムバス」などが考えられる。
【0061】
不揮発性メモリには、所定位置に配置された可動コンテナを目的場所まで移動させるルートを決定するプログラムや、他の装置と通信手段を介して通信を行うための通信プログラム、収納室内の壁や出入口の座標などを示すマップ情報、各可動コンテナの配置場所を示す可動コンテナ配置情報、などが格納されており、必要に応じてRAMに読み出される。なお、自走式移動ロボットにおいて移動ルートを決定する場合は、上記決定プログラムや、マップ情報、可動コンテナ配置情報などを保持する必要はない。
【0062】
また、通信手段は、選択受付部から選択された可動コンテナIDの情報などを受信したり、自走式移動ロボットに対して可動コンテナを動かす命令を送信したりする。
【0063】
上記において、荷物画像保持部や選択受付部、命令出力部は別々のハードウェアによって実現される例を示したが、これらの各部の全部又は一部が同一のハードウェアによって実現される例も可能である。例えば、荷物画像保持部と命令出力部を一の集中制御装置の機能として実現することも可能であるし、選択受付部と命令出力部を一の利用者端末装置の機能として実現することも可能である。
【0064】
<具体的な処理の流れ>
(収納処理)
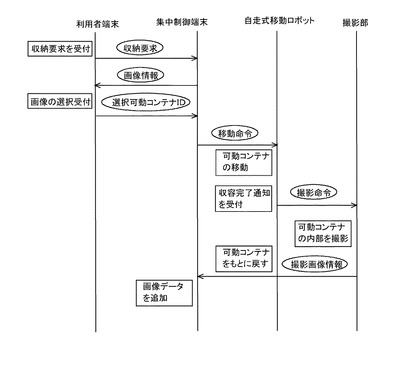
図8は、本実施形態の収納システムの収納処理の流れの一例を示す図である。まず、利用者端末において収納要求を受け付け、集中制御端末に対して収納要求を送信する(収容要求送信ステップ)。
【0065】
次に、集中制御端末は、収納要求を受信すると、各可動コンテナの荷物収容状況の画像を利用者端末に対して送信する(荷物収容画像送信ステップ)。
【0066】
次に、利用者端末(選択受付部)は、各可動コンテナの荷物収容状況の画像を表示し、荷物を収容する可動コンテナの選択を受け付ける(選択受付ステップ)。次に、利用者端末(選択受付部)は、集中制御端末に対して選択された可動コンテナのIDを送信する(選択コンテナID送信ステップ)。
【0067】
次に、集中制御端末(命令出力部)は、選択された可動コンテナIDを含めた移動命令を自走式移動ロボットに対して送信する(移動命令送信ステップ)。
【0068】
次に、自走式移動ロボットは、移動命令に基づいて選択された可動コンテナを収納室内から居室へと移動させる(移動ステップ)。次に、自走式移動ロボットは、被収納物が可動コンテナに収容されたことを示す収容完了通知を自身が備える操作入力手段又は利用者端末の操作入力手段を介して受け付ける(収容完了通知受付ステップ)。次に、自走式移動ロボットは、可動コンテナ内の荷物収容状況を撮影するための命令を撮影部に送信する(撮影命令送信ステップ)。
【0069】
次に、撮影部は、撮影命令を受信すると、可動コンテナの内部を撮影する(撮影ステップ)。次に、撮影部は、撮影した荷物収容状況の画像をその可動コンテナIDと関連付けて集中制御端末(荷物画像保持部)に対して送信する(撮影画像送信ステップ)。
【0070】
次に、自走式移動ロボットは、撮影後において可動コンテナを収納室内のもとの配置場所に戻す(収納ステップ)。
【0071】
次に、集中制御端末(荷物画像保持部)は、選択された可動コンテナの荷物収容状況の画像を受信すると、その可動コンテナの荷物収容状況の画像データを追加する(画像データ追加ステップ)。
【0072】
(移動手順の決定処理)
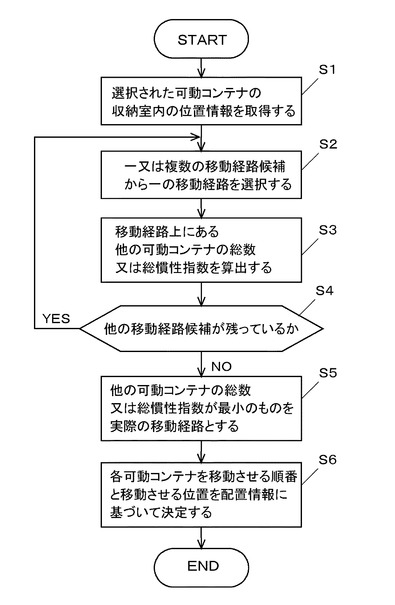
図9は、一又は複数の可動コンテナの移動手順の決定処理の流れの一例を示す図である。当該移動手順の決定処理は、集中制御端末(命令出力部)にて行ってもよいし又は自走式移動ロボットにて行ってもよい。また、両装置で処理を分担して行うことも可能である。
【0073】
まず、S1において、選択受付部にて選択された可動コンテナ(以下、利用者選択コンテナという)の収納室内の位置を、収納室内の配置情報に基づいて取得する(選択コンテナ位置取得ステップ)。ここで、選択受付部にて連続して複数の可動コンテナが選択された場合は、複数の可動コンテナの収納室内の各位置を取得する。
【0074】
次に、S2において、利用者選択コンテナの収納室内の位置から居室へと移動させるための一又は複数の経路候補から一の経路を選択する(経路選択ステップ)。なお、選択受付部にて連続して複数の可動コンテナが選択された場合は、各利用者選択コンテナについて一又は複数の経路候補から一の経路を選択する。
【0075】
次に、S3において、選択された経路において、一又は複数の利用者選択コンテナの移動経路上にある他の可動コンテナの総数を算出する(他可動コンテナ数算出ステップ)。なお、当該算出処理に代えて、移動経路上にある他の可動コンテナの慣性指数(慣性質量に比例する指数)を足し合わせた和(総慣性指数)を算出する処理を行うことも可能である。
【0076】
次に、S4において、S2とS3の処理を行っていない他の経路候補が残っているか否か判断し、完了していない場合はS2に戻る(他候補確認ステップ)。なお、選択受付部にて連続して複数の可動コンテナが選択された場合は、異なる組み合わせの移動経路候補が残っていないか否について判断し、完了していない場合はS2に戻る。
【0077】
次に、S5において、S2〜S4の処理に基づいて移動経路上にある他の可動コンテナの総数又は総慣性指数が最小となる移動経路を実際の移動経路として決定する(経路決定ステップ)。
【0078】
次に、S6において、決定された移動経路において利用者選択コンテナ及び他の可動コンテナを移動させる順番及び移動させる位置を収納室内の配置情報に基づいて決定する(移動手順決定ステップ)。
【0079】
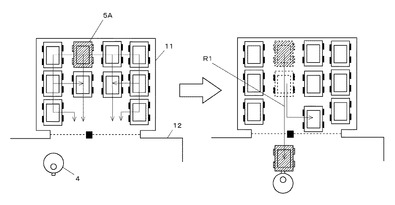
図10は、図9の処理により決定された移動手順に基づいて、選択部にて選択された一つの可動コンテナを収納室から居室へ移動させる様子を示す図である。この図に示すように、「選択された可動コンテナ」5Aを「収納室」11から「居室」12へ「自走式移動ロボット」4により移動させる際に、複数の移動経路の候補が存在する。この図の例では、複数の移動経路のうち、「一の移動経路」R1の上にある他の可動コンテナの総数が最も少なくなっているため(総数=1)、当該移動経路を実際の移動経路として決定している。
【0080】
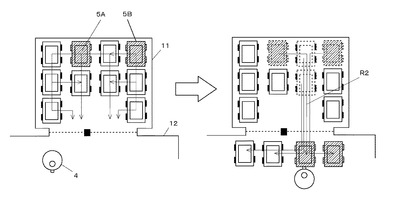
図11は、図9の処理により決定された移動手順に基づいて、選択部にて選択された二つの可動コンテナを収納室から居室へ移動させる様子を示す図である。この図に示すように、「選択された可動コンテナ」5A、5Bを「収納室」11から「居室」12へ「自走式移動ロボット」4により移動させる際に、複数の移動経路の候補が存在する。この図の例では、複数の移動経路のうち、「一の移動経路」R2の上にある他の可動コンテナの総数が最も少なくなっているため(総数=2)、当該移動経路を実際の移動経路として決定している。
【0081】
<効果>
本実施形態の構成をとる本発明により、利用者はいずれの可動コンテナにおいて目的とする物品が収容されているかを容易に把握することが可能になる。また、自走式移動ロボットが可動コンテナを収納室内から居室まで移動させるため、利用者の作業負担をさらに軽減することが可能になる。
【0082】
<<実施形態2>>
【0083】
<システムの概要>
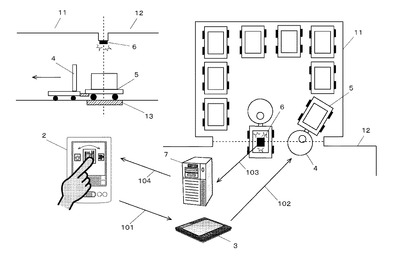
図12は、本実施形態の住宅の収納システムのシステム概要を示す図である。この収納システムにおいて、選択受付部2により画像に付加された情報を検索キーとした画像の検索要求を受け付けた場合、検索要求105が荷物画像保持部7に送信される。荷物画像保持部7は、検索要求に応じて所定条件を満たす画像を検索し、一又は複数の検索結果の画像106を選択受付部2に通知する。そして、利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持される。
【0084】
<システムの構成>
図13は、本実施形態の「住宅の収納システム」の機能ブロックを示す図である。この図にあるように、「住宅の収納システム」1は、「選択受付部」2と、「命令出力部」3と、「自走式移動ロボット」4と、「可動コンテナ」5と、「撮影部」6と、「荷物画像保持部」7と、から構成され、「荷物画像保持部」7は、「付加情報保持手段」71と、「画像検索手段」72と、「検索結果通知手段」73とを有し、「選択受付部」2は、「検索要求受付手段」21を有する。以下、「付加情報保持手段」、「画像検索手段」、「検索結果通知手段」、「検索要求受付手段」について説明する。
【0085】
(付加情報保持手段の機能)
「付加情報保持手段」は、荷物収容状況の画像とその画像に付加された情報である付加情報とをさらに関連付けて保持する機能を有する。ここで、付加情報としては、収納日時や収納者、被収納物の種別、被収納物の重要度、被収納物の収納条件、取り出し予定日時、廃棄予定日時、キーワードなどが挙げられる。
【0086】
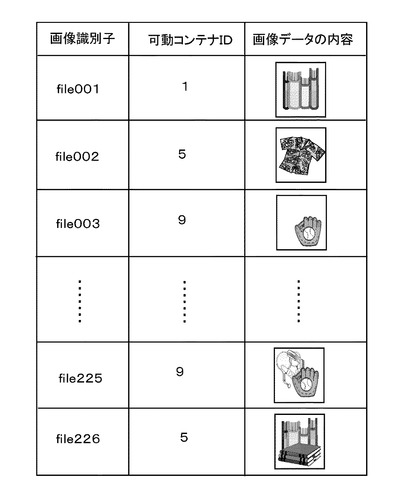
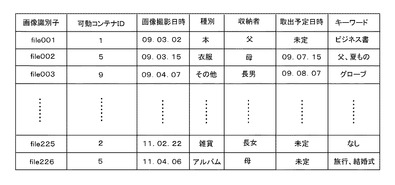
荷物画像保持部は、付加情報保持手段の機能を利用して、例えば図14に示すようなテーブル情報を保持している。この図の例では、荷物収容状況の画像の識別子(ファイル名など)とその荷物を収容している可動コンテナのIDを、その画像の撮影日時、被収容物の種別、収納者、取り出し予定日時、キーワードと関連付けて保持している。この図に示しているように、同一の可動コンテナであっても、異なる日時に撮影された荷物収容状況の画像はそれぞれ保持されている。
【0087】
付加情報保持手段にて保持される付加情報は、利用者端末や自走式移動ロボットが備える操作入力手段を介して受け付けることが可能である。具体的には、特定の可動コンテナに対する物品の収容が完了し、操作入力手段を介して利用者による収容完了通知を受け付ける際に、合わせて付加情報の入力を受け付けて、可動コンテナのIDと共に荷物画像保持部(付加情報保持手段)に送信する。
【0088】
荷物画像保持部(付加情報保持手段)は、撮影部から受信する上記可動コンテナの荷物収容状況の画像と、上記付加情報を関連付けて保持する。なお、利用者端末(選択受付部)にて物品を収容する可動コンテナの選択を受け付ける際に、合わせて付加情報の入力を受け付けることも可能であるし、必要に応じて利用者端末にて付加情報の更新を行うことも可能である。
【0089】
また、付加情報は、例えば荷物画像保持部が備える操作入力手段を介して更新することも可能である。具体的には、荷物画像保持部が備える表示手段にて、図14に示すようなテーブルを表示し、操作入力手段を介して付加情報の入力を受け付ける。
【0090】
また、荷物画像保持部は、撮影部から受信する上記可動コンテナの荷物収容状況の画像に対して画像認識処理を行い、当該荷物画像に含まれる被収納物の種類、色、大きさ等を付加情報として抽出し、当該付加情報を荷物収容状況の画像と関連付けて自動登録する手段(画像認識登録手段)を有していてもよい。
【0091】
また、収納室又は居室の床面の一部に可動コンテナの重量を検知する床面重量検知部が設けられている場合や、自走式移動ロボットに可動コンテナの動きにくさ(慣性質量等)を検知する慣性質量検知部が備えられている場合などは、荷物画像保持部は、可動コンテナの重量等の情報を付加情報として上記検知部などから受信し、当該付加情報を荷物収容状況の画像と関連付けて自動登録する手段(登録手段)を有していてもよい。
【0092】
さらに、可動コンテナの重量等の情報から、可動コンテナの被収容物の種別(重量物、軽量物等)を決定し、荷物収容状況の画像と関連付けて付加情報として自動登録してもよい。また、可動コンテナの重量等の情報から可動コンテナの状態変化(可動コンテナから物が取り出された、追加された等)を検出し、当該状態変化の情報を付加情報として荷物収容状況の画像と関連付けて自動登録してもよい。
【0093】
(画像検索手段の機能)
「画像検索手段」は、前記付加情報を検索キーとした画像の検索要求に応じて検索する機能を有する。当該検索要求は、所定の付加情報と関連付けられた画像の検索を要求するものである。具体的には、特定の収納日時(例えば、1年前から現在日時までの収納日時など)の情報が付加された画像の検索要求や、特定の収納者(例えば、父など)の情報が付加された画像の検索要求、特定の被収納物の種別(例えば、書籍類など)の情報が付加された画像の検索要求、被収納物に関する特定の種類、色、大きさ、重量等の情報が付加された画像の検索要求、可動コンテナに関する特定の状態変化の情報が付加された画像の検索要求などである。
【0094】
画像の検索は、各可動コンテナの最新の荷物収容状況の画像のみを対象とすることも可能であるが、基本的には各可動コンテナの最新ではない過去の荷物収納状況の画像を含めて行う。例えば、一の可動コンテナに対して「長男」が「雑誌」を収容した後に、「父」が異なる日時において「風呂敷」を収容することもあり、「長男」は最新の荷物収納状況の画像からでは「雑誌」を最新の画像からでは確認できない可能性もあるためである。
【0095】
(検索結果通知手段の機能)
「検索結果通知手段」は、検索結果を選択受付部に通知する機能を有する。ここで、検索結果とは、所定の検索条件を満たす画像情報をいうものである。なお、検索条件を満たす画像のデータ量が所定以上ある場合は、一部の画像のみの情報を選択受付部に通知し、他の画像に関しては選択受付部からの要求に応じて通知する構成も可能である。
【0096】
(検索要求受付手段の機能)
「検索要求受付手段」は、前記付加情報を検索キーとした画像の検索要求を受け付ける機能を有する。検索要求受付手段は、画像の検索要求を受け付けると、荷物画像保持部の画像検索手段に対して検索要求の情報を送信し、検索結果の情報を荷物画像保持部の検索結果通知手段から受信する。
【0097】
検索要求受付手段は、一又は複数の検索キー(収納日時、収納者、被収納物の種類など)を表示手段にて表示し、検索キーの内容を決定する操作(「収納者」は「父」であり、「被収納物の種類」は「書籍類」など)を操作入力手段にて受け付ける構成が考えられる。検索キーの内容を決定する操作は、選択形式によって行うことも可能であるし、文字入力や音声入力によって行うことも可能である。
【0098】
<具体的な処理の流れ>
(画像の検索処理)
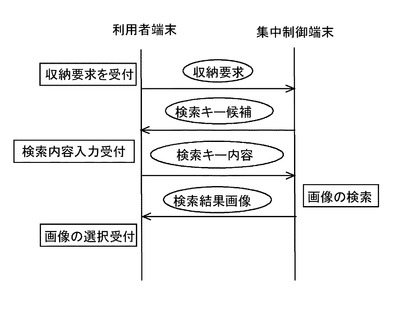
図15は、収納システムの画像の検索処理の流れの一例を示す図である。まず、利用者端末において、収納要求を受け付け、集中制御端末に対して収納要求を送信する(収容要求送信ステップ)。
【0099】
次に、集中制御端末は、収納要求を受信すると、一又は複数の検索キー候補の情報を利用者端末に対して送信する(検索キー情報送信ステップ)。
【0100】
次に、利用者端末は、一又は複数の検索キー候補の情報を表示し、一又は複数の検索キーに関する内容入力を受け付ける(検索内容入力受付ステップ)。さらに、利用者端末は検索キーの内容情報を集中制御端末に対して送信する(検索内容送信ステップ)。
【0101】
次に、集中制御端末は、決定された検索キーの内容に基づいて条件を満たす荷物収容状況の画像を検索する(画像検索ステップ)。さらに、集中制御端末は、検索結果である一又は複数の可動コンテナの荷物収容状況の画像を利用者端末に対して送信する(検索結果画像送信ステップ)。
【0102】
次に、利用者端末は、検索結果である一又は複数の可動コンテナの荷物収容状況の画像を表示し、荷物を収容する可動コンテナの選択を受け付ける(選択受付ステップ)。以後の処理は、実施形態1の図で説明したものと同様であるから、説明を省略する。
【0103】
<効果>
本実施形態の構成をとる本発明により、荷物収容状況の画像に付加された情報に基づいて、収納物の収納場所を特定し、当該収納物を収容する可動コンテナを自走式移動ロボットにより取り出すことが可能である。
【符号の説明】
【0104】
1…住宅の収納システム、2…選択受付部、3…命令出力部、4…自走式移動ロボット、5…可動コンテナ、6…撮影部、7…荷物画像保持部、11…収納室、12…居室、13…床面重量検知部、21…検索要求受付手段、41…牽引部材、42…撮影手段、51…台車、52…コンテナ、53…連結部材、71…付加情報保持手段、72…画像検索手段、73…検索結果通知手段、101…選択情報、102…移動命令、103…画像情報、104…選択候補画像情報、105…検索要求、106…検索結果の画像、0601・0701…MPU、0602・0702…RAM、0603・0703…不揮発性メモリ、0604・0704…通信手段、0605…ステッピングモータ、0606…モータI/F、0607…バッテリ、0608…ICタグリーダ、0705…撮像手段、0706…LED、0707…LEDコントローラ、0708…受電手段
【技術分野】
【0001】
本発明は、住宅内に設けた収納室に可動コンテナを配置して、住宅内の被収納物を収納管理する住宅の収納システムに関する。
【背景技術】
【0002】
住宅内において、居室のスペースが物品で占有されないように、収納室を設けることが一般的に行われている。収納室は、住宅の1階と2階の間などの狭い空間に設けられ、屈んで収納の作業を行わなければならない場合が多い。
【0003】
そこで、例えば特許文献1では、収納室への物品の出し入れの作業負担を軽減する収納室構造が提案されている。当該文献においては、被収納物を収納室内において円滑に移動させるための収納物移動体(例えば、収納ワゴン)や作業者が座って収納物移動体を牽引するための牽引車などが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−100376
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、収納室内に複数の物品を分けて収納する場合は、収納室内の各場所に何を収納したか分からなくなることも多く、納室内から所望の物品を取り出す際には、収納室内を探し回らないといけない場合もあった。
【課題を解決するための手段】
【0006】
以上の課題を解決するために、本発明は、住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理する住宅の収納システムであって、可動コンテナを収納室と居室の間で移動させる自走式移動ロボットと、可動コンテナに被収納物を収容し、居室から収納室内に可動コンテナを移動させる際に、可動コンテナ内の収容状況を撮影する撮影部と、荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する荷物画像保持部と、荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける選択受付部と、選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する命令出力部と、を有する収納システムを提案する。
【発明の効果】
【0007】
以上のような構成をとる本発明により、利用者は収納室内の各可動コンテナにて収容されている物品を容易に把握することが可能になる。また、自走式移動ロボットが所望の可動コンテナを収納室内から居室まで移動させるため、利用者の作業負担をさらに軽減することが可能になる。
【図面の簡単な説明】
【0008】
【図1】実施形態1の住宅の収納システムのシステム概要を示す図
【図2】実施形態1の住宅の収納システムの機能ブロック図
【図3】可動コンテナの外形の一例を示す図
【図4】自走式移動ロボットの外形の一例を示す図
【図5】荷物画像保持部にて保持される情報の一例を示す図
【図6】自走式移動ロボットのハードウェア構成の一例を示す図
【図7】撮影部のハードウェア構成の一例を示す図
【図8】実施形態1の収納システムの収納処理の流れの一例を示す図
【図9】可動コンテナの移動手順の決定処理の流れの一例を示す図
【図10】選択された一つの可動コンテナを収納室から移動させる様子を示す図
【図11】選択された二つの可動コンテナを収納室から移動させる様子を示す図
【図12】実施形態2の住宅の収納システムのシステム概要を示す図
【図13】実施形態2の住宅の収納システムの機能ブロック図
【図14】荷物画像保持部にて保持される情報の一例を示す図
【図15】収納システムの画像の検索処理の流れの一例を示す図
【発明を実施するための形態】
【0009】
以下に、本発明の実施例を説明する。実施形態と請求項の相互の関係は、以下のとおりである。実施形態1は主に請求項1、3、4に関し、実施形態2は主に請求項2、3、4に関する。なお、本発明はこれらの実施形態に何ら限定されるものではなく、その要旨を逸脱しない範囲内において、様々な態様で実施しうる。
【0010】
<<実施形態1>>
【0011】
<システムの概要>
図1は、本実施形態の住宅の収納システムのシステム概要を示す図である。この収納システムにおいて、選択受付部2により利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持され、選択受付部2からの要求に応じて選択候補画像104として選択受付部2に送信される。
【0012】
<システムの構成>
図2は、本実施形態の「住宅の収納システム」の機能構成を示す図である。この図にあるように、「住宅の収納システム」1は、「選択受付部」2と、「命令出力部」3と、「自走式移動ロボット」4と、「可動コンテナ」5と、「撮影部」6と、「荷物画像保持部」7と、から構成される。以下、各構成の機能について説明する。
【0013】
(住宅の収納システムの機能)
「住宅の収納システム」は、住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理するシステムである。ここで、住宅とは、人の居住を用途とする建築物であって、個人住宅や集合住宅などのことをいうものである。また、収納室とは、物品の収納を用途とする部屋である。また、被収納物とは収納室に収納される物品のことをいう。
【0014】
(可動コンテナの機能)
「可動コンテナ」は、可動性を有するコンテナのことである。ここで、可動コンテナは、自走する機能を備えていてもよいが、自走式移動ロボットによって牽引可能なものであれば足りる。図3は、「可動コンテナ」の外形の一例を示す図である。この図の例では、「可動コンテナ」は、上面に物体を載置可能な「台車」51と当該台車に載置された「コンテナ」52などから構成される。また、上記台車は、自走式移動ロボットの牽引部材と連結するための「連結部材」53を備えている。なお、可動コンテナは上記構成に限定されるものではなく、例えばコンテナそのものに車輪が付いた構成なども可能である。
【0015】
なお、可動コンテナは、天井方向から荷物の収容状況の画像を撮影する場合は上面の全部又は一部が開口可能な構成とすることが好ましい。また、水平方向から荷物の収容状況の画像を撮影する場合は横側面の全部又は一部が開口可能な構成とすることが好ましい。
【0016】
また、可動コンテナは、自身のIDを保持するためのICタグを備える構成も可能である。この場合、自走式移動ロボットはICタグリーダによって各可動コンテナのIDを読みとり、所望の可動コンテナであるか否か判断する。
【0017】
なお、可動コンテナ自身が可動コンテナIDなどの情報をICタグなどの記憶手段により保持する必要は必ずしもなく、以下に示すように自走式移動ロボットなどが各可動コンテナの外観や位置などから各可動コンテナを判別してもよい。
【0018】
例えば、可動コンテナIDを示す文字、記号、数字等を各可動コンテナの外面に記載する構成が考えられる。この場合、自走式移動ロボットは、自身が備える撮影手段又は他の装置が備える撮影手段から得られる画像情報に基づいて各可動コンテナの可動コンテナIDを取得し、所望の可動コンテナであるか否か判断する。
【0019】
また、他の例として各可動コンテナの色や形状を異ならせる構成も可能である。この場合、自走式移動ロボットは、自身が備える撮影手段又は他の装置が備える撮影手段から得られる画像情報と、各可動コンテナのIDとその特徴(色、形状など)を関連付けたテーブルに基づいて、所望の可動コンテナであるか否か判断する。
【0020】
また、他の例として収納室内の各場所の識別子(区画番号、配列番号など)を各可動コンテナID(識別番号、識別記号など)と関連付ける構成も可能である。この場合、自走式移動ロボットは、収納室内における配置場所に基づいて所望の可動コンテナであるか否か判断する。なお、各可動コンテナの配置構成は特に限定されるものではなく、収納室内において壁に沿って配置する構成も可能であるし、壁から離れた位置にも合わせて配置する構成も可能である。
【0021】
収納室内の可動コンテナの数は固定的である必要はなく、必要に応じて増やしたり減らしたりすることも可能である。例えば、一の可動コンテナを収納室に追加する場合は、追加する可動コンテナのIDを利用者端末から命令出力部や自走式移動ロボットに通知し、命令出力部や自走式移動ロボットにおいて新しいレコードを管理情報として追加する。また、一の可動コンテナを収納室から除外する場合は、削除する可動コンテナのIDを利用者端末から命令出力部や自走式移動ロボット、荷物画像保持部に通知し、命令出力部や自走式移動ロボット、荷物画像保持部において関連するレコードを管理情報から削除する。
【0022】
(自走式移動ロボットの機能)
「自走式移動ロボット」は、可動コンテナを収納室と居室の間で移動させる機能を有する。ここで、自走式移動ロボットは、命令出力部から、特定の可動コンテナを収納室内から居室間に移動させるために一又は二以上の可動コンテナを動かす命令を受信し、当該命令に従って動作する。
【0023】
図4は、「自走式移動ロボット」の外形の一例を示す図である。自走式移動ロボットは、可動コンテナを牽引するための「牽引部材」41を備え、必要に応じて可動コンテナと自身を連結・分離することが可能である。ここで、牽引部材は、可動コンテナの連結部材と組み合う構成とすることも可能であるし、電流によって一時的に磁性を発生させて可動コンテナの磁石と引き合う構成とすることも可能である。この図の例では、自走式移動ロボットは可動コンテナの内部を上側から撮影する「撮影手段」42を備える。
【0024】
また、自走式移動ロボットは、各可動コンテナを牽引する際に慣性質量に比例する指数(慣性指数)を算出し、各可動コンテナIDと関連付けてその情報を保持したり、命令出力部や荷物画像保持部に送信したりする構成も可能である。ここで、慣性指数は、各可動コンテナを牽引する力を同一にした場合、可動コンテナを停止状態から所定速度までに加速するのに必要な時間に比例するため、当該必要時間に基づいて算出することが可能である。各可動コンテナの慣性指数は各可動コンテナにおいてどれくらの荷物が収容されているかの目安となり、命令出力部や自走式移動ロボットにおいて移動経路や移動手順を決定する際の判断要因として利用することができる。
【0025】
また、自走式移動ロボットは、上記のように、可動コンテナ内の収容状況などを撮影する「撮影部」を備える構成も可能である。当該撮影部は、必要に応じて自走式移動ロボットから取り外し可能な構成とすることも可能である。この場合、利用者は自走式移動ロボットから撮影部を取り外して、可動コンテナ内の収容状況を示す一又は複数の画像を撮影することができる。
【0026】
また、自走式移動ロボットは、操作入力手段や音声入力手段を備え、入力された情報を荷物画像保持部に送信したり、入力された情報に基づいて自身の動作を制御したりする構成も可能である。例えば、利用者は入力手段を利用して可動コンテナ内の収容状況を示す情報(収容した物品名、収納日時、収納者など)を入力し、荷物画像保持部にて可動コンテナIDと関連付けて保持させることができる。また、利用者は入力手段を利用して可動コンテナに対する収容が完了したことを通知し、自走式移動ロボットは収容完了通知に応じて可動コンテナを居室から収納室へ移動させることも可能である。
【0027】
また、自走式移動ロボットは、収納室内の各場所の温度や湿度、粉塵量、明るさ等を計測するセンサを備え、センサ情報を利用者端末(選択受付部)に送信したり、センサ情報に基づいて自身の動作を制御したりする構成も可能である。当該構成とすることにより、利用者は利用者端末において収納室内の温度や湿度などを確認することができる。また、自走式移動ロボットは、収納室内の環境条件(温度、湿度など)及び被収納物の種別(許容温度、許容湿度など)に応じて、アラーム音を出力したり、所定の可動コンテナの位置を移動させたりすることも可能になる。
【0028】
また、自走式移動ロボットは、収納室内のフロアの埃やゴミ等を吸引したり、収納室内の空気を取り込んでフィルタに通し、空気中の埃やゴミ等を取り除いたりする機能を備える構成も可能である。また、自走式移動ロボットは、上記で説明したセンサから得られる粉塵量に応じて掃除動作を開始する構成も可能である。
【0029】
(撮影部の機能)
「撮影部」は、可動コンテナに被収納物を収納した後に可動コンテナ内の収容状況を撮影する機能を有する。また、撮影部は、撮影した荷物収容状況の画像を有線又は無線の通信手段を利用して荷物画像保持部に送信する。
【0030】
撮影部の全部又は一部は、図4に示したように前記自走式移動ロボットに備え付ける構成も可能であるし、図1に示したように前記収納室の出入口の天井付近に配置する構成も可能である。
【0031】
また、撮影部は、自走式移動ロボット又は命令出力部から撮影命令を受信し、当該命令に応じて可動コンテナ内の収容状況を撮影する構成が考えられる。例えば、自走式移動ロボットは利用者から可動コンテナに対する収容完了通知を受け付けた後、撮影部に対して収容状況を撮影するための命令を送信し、撮影部は当該命令に応じて可動コンテナ内の収容状況を撮影する。また、撮影部に操作入力手段を設け、利用者による操作入力に応じて可動コンテナ内の収容状況を撮影する構成も可能である。
【0032】
また、他の例として、命令出力部は利用者端末(選択受付部)から撮影指示を受け付けた際に、撮影部に対して収容状況を撮影するための命令を送信し、撮影部は当該命令に応じて可動コンテナ内の収容状況を撮影する。
【0033】
なお、撮影部は、撮影命令を受信した直後のタイミングにおいて可動コンテナ内の収容状況を撮影することも可能であるし、撮影命令に撮影タイミングが指定されている場合はタイマによって時間をカウントして撮影することも可能である。また、収納室の出入口の天井付近に配置された撮影部は、可動コンテナが撮影領域(出入口付近)に入ったことをカメラで検知して撮影することも可能である。この場合、可動コンテナの移動方向をさらに取得して、移動方向に応じて撮影するか否かを決定してもよい。例えば、可動コンテナが収納室に入場する場合は撮影し、収納室から退場する場合は撮影しない、といったものである。
【0034】
(荷物画像保持部の機能)
「荷物画像保持部」は、荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する機能を有する。ここで、荷物収容状況の画像及び可動コンテナIDは撮影部から有線又は無線の通信手段を利用して受信する。なお、可動コンテナIDは撮像部に対して撮像命令を送信する命令出力部や自走式移動ロボットから受信してもよい。
【0035】
荷物画像保持部は、住宅内のネットワーク上にあるデータサーバであってもよいし、外部のネットワーク(インターネット)上にあるデータサーバであってもよい。また、荷物画像保持部は、利用者端末からの要求に応じて内部に保持される画像情報を利用者端末(選択受付部)に送信することが可能である。
【0036】
荷物画像保持部は、例えば図5に示すように、荷物収容状況の画像の識別子(ファイル名など)とその荷物を収容している可動コンテナIDをテーブル情報として保持する。一の可動コンテナに対して追加的に物品の収容を行った場合であってもその都度荷物収容状況の画像が撮影されるため、コンテナの下側部分に何が埋もれているかについても把握することが可能である。
【0037】
なお、一の可動コンテナが収納室から除外された場合は、当該可動コンテナのIDを利用者端末から受信して、当該可動コンテナIDに関連付けられたレコードを荷物画像保持部から削除する構成も可能である。また、利用者端末から特定の画像の削除要求を受信した場合は、当該画像のデータを荷物画像保持部から削除する構成も可能である。
【0038】
(選択受付部の機能)
「選択受付部」は、荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける機能を有する。ここで、選択受付部は、荷物収容状況の画像の選択を受け付けるために、荷物画像保持部から選択候補となる一又は複数の荷物収容状況の画像を取得し、表示手段により表示する。また、利用者から操作入力手段を介して選択された荷物収容状況の画像に関連付けられた可動コンテナIDを命令出力部に対して送信する。
【0039】
なお、選択受付部にて受け付ける画像の選択数は一つである必要はなく、複数の画像の選択を連続して受け付けることも可能である。ここで、選択された複数の画像が同一の可動コンテナに関するものであれば命令出力部に対して一の可動コンテナIDを送信すればよいが、複数の可動コンテナに関するものであれば命令出力部に対して複数の可動コンテナIDを送信することになる。
【0040】
(命令出力部の機能)
「命令出力部」は、選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する機能を有する。
【0041】
命令出力部は、選択受付部から選択された可動コンテナIDを受信し、当該可動コンテナIDの情報を含む移動命令を自走式移動ロボットに対して送信する。
【0042】
また、命令出力部は、選択された可動コンテナを収納室内の配置場所から居室までどのようなルートで移動させるか、又は居室から収納室の配置場所までどのようなルートで移動させるかを特定する処理を行い、当該移動ルートの情報を移動命令に含めて自走式移動ロボットに対して送信する構成も可能である。ただし、当該移動ルートの特定処理は、自走式移動ロボットにて行う構成とすることも可能である。
【0043】
また、命令出力部は、選択された可動コンテナを居室へ移動させるために、収納室内にて位置をずらす必要のある他の可動コンテナを特定する処理を行い、当該他の可動コンテナのIDを移動命令に含めて自走式移動ロボットに対して送信する構成とすることも可能である。ただし、当該他の可動コンテナIDの特定処理は、自走式移動ロボットにて行うことも可能である。
【0044】
荷物画像保持部、選択受付部、命令出力部を実現するためのソフトウェアプログラムは、同一のハードウェアによって実行される構成も可能である。例えば、利用者端末が選択受付部と命令出力部の両機能を備える構成も可能であるし、集中制御端末が荷物画像保持部と命令出力部の両機能を備える構成も可能である。
【0045】
なお、必須の構成ではないが、収納室又は居室の床面の一部に可動コンテナの重量を検知する床面重量検知部を設けることも可能である。例えば図1に示すように、収納室の出入口付近に床面検知部13を設けることが考えられる。また、自走式移動ロボットが可動コンテナの動きにくさ(慣性質量等)を検知する慣性検知部を備える構成も可能である。これらの検知部にて検知された情報は、荷物画像保持部や選択受付部、命令出力部、自走式移動ロボット等に送信される。
【0046】
<具体的な構成>
(自走式移動ロボットの具体的な構成)
図6は、自走式移動ロボットのハードウェア構成の一例を示す図である。この図の例では、自走式移動ロボットは、「MPU」0601、「RAM」0602、「不揮発性メモリ」0603、「通信手段」0604、「ステッピングモータ」0605、「モータI/F」0606、「バッテリ」0607、「ICタグリーダ」0608、「システムバス」0609などから構成される。
【0047】
不揮発性メモリには、ステッピングモータを制御するためのプログラム、他の装置と通信I/Fを介して通信を行うための通信プログラム、所定位置に配置された可動コンテナを目的場所まで移動させるルートを決定するプログラムや、収納室内の壁や出入口の位置などを示すマップ情報、各可動コンテナが配置場所を示す可動コンテナ配置情報、などが格納されており、必要に応じてRAMに読み出される。
【0048】
また、通信手段は、命令出力部から自走式移動ロボットに対する命令情報を受信したり、自走式移動ロボットから撮影部に対する撮影命令の情報を送信したりする。また、バッテリは、MPUやステッピングモータなどを駆動するための電力を供給することが可能であり、必要に応じて充電することが可能である。バッテリに対する充電は、自走式移動ロボットが収納室内の所定の場所に設置された充電ポートに移動して自動的に行う構成も可能であるし、利用者によって適宜行われる構成も可能である。
【0049】
ICタグリーダは、可動コンテナが備えるICタグからその可動コンテナIDの情報を読み取ってMPUに送信する。MPUは、ICタグリーダから受信した可動コンテナIDに基づいて所望の可動コンテナであるか否か判断したり、可動コンテナの配置情報を更新したりする。
【0050】
(撮影部の具体的な構成)
図7は、撮影部のハードウェア構成の一例を示す図である。この図の例では、撮影部は、「MPU」0701と、「RAM」0702、「不揮発性メモリ」0703、「通信手段」0704、「撮像手段」0705、「LED」0706、「LEDコントローラ」0707、「受電手段」0708、「システムバス」0709などから構成される。
【0051】
不揮発性メモリには、撮影命令に応じて撮影処理を実行するプログラムや、他の装置と通信手段を介して通信を行うためのプログラム、撮影した画像の情報などが格納されており、必要に応じてRAMに読み出される。
【0052】
また、通信手段は、自走式移動ロボットや命令出力部から撮影命令を受信したり、撮影部から荷物画像保持部に対して撮影した画像情報を送信したりする。また、受電手段は、MPUやレンズモータなどを駆動するための電力を住宅内電源又は自走式移動ロボットのバッテリなどから受電する。
【0053】
また、撮像手段は、入力された光信号をイメージセンサにて電気信号に変換し、A/D変換器にてアナログ信号からデジタル信号へ変換して、RAMへ出力する。MPUは、RAMの画像情報を可動コンテナIDと関連付けて不揮発性メモリに格納する。また、通信手段を介して荷物画像保持部へ可動コンテナIDと関連付けられた画像情報を送信する。また、LEDコントローラはMPUからの点灯指示に応じてLEDを点灯制御し、撮影時の明るさを調整する。
【0054】
(荷物画像保持部の具体的な構成)
荷物画像保持部の動作制御を実現するためのハードウェア構成としては、例えば「CPU」や「RAM」、「大容量記憶装置(ハードディスクドライブ等)」、「通信手段」、「操作入力手段」、「表示手段」、「受電手段」、「システムバス」などから構成される。当該構成は、一般的なサーバ装置の構成と同様である。
【0055】
大容量記憶装置には、荷物収容状況の画像をその荷物を収容している可動コンテナIDなどを関連付けて保持するためのプログラムや、可動コンテナIDを検索キーとした荷物収容状況の画像の検索要求を受け付けて検索するためのプログラム、可動コンテナIDと関連付けられた画像のデータなどが格納されており、必要に応じてRAMに読み出される。
【0056】
また、通信手段は、撮影部から荷物収容状況の画像の情報を受信したり、選択受付部に可動コンテナIDと関連付けた荷物収容状況の画像の情報を送信したりする。また、表示手段は荷物収容状況の画像や可動コンテナIDを一覧で表示することが可能である。また、操作入力手段は、荷物収容状況の画像の選択を受け付けたり、荷物収容状況の画像に付加する情報の修正・更新を受け付けたりする。
【0057】
(選択受付部の具体的な構成)
選択受付部の動作制御を実現するためのハードウェア構成としては、例えば、「CPU」や「RAM」、「不揮発性メモリ」、「通信手段」、「操作入力手段」、「表示手段」、「バッテリ」、「受電手段」、「システムバス」などが考えられる。当該構成は、一般的な利用者端末の構成と同様である。
【0058】
不揮発性メモリには、荷物収容状況の画像を表示手段に表示するためのプログラムや、荷物収容状況の画像の選択を操作入力手段にて受け付けるためのプログラム、他の装置と通信手段を介して通信するためのプログラムなどが格納されており、必要に応じてRAMに読み出される。
【0059】
また、通信手段は、荷物画像保持部から荷物収容状況の画像を受信したり、命令出力部に画像の選択結果の情報を送信したりする。また、表示手段は、荷物収容状況の画像や対応する可動コンテナIDを表示する。また、操作入力手段は、表示手段にて表示した荷物収容状況の画像の選択を受け付けたり、荷物収容状況の画像に付加すべき情報の入力を受け付けたりする。
【0060】
(命令出力部の具体的な構成)
命令選択部の動作制御を実現するためのハードウェア構成としては、例えば、「CPU」や「RAM」、「不揮発性メモリ」、「通信手段」、「受電手段」、「システムバス」などが考えられる。
【0061】
不揮発性メモリには、所定位置に配置された可動コンテナを目的場所まで移動させるルートを決定するプログラムや、他の装置と通信手段を介して通信を行うための通信プログラム、収納室内の壁や出入口の座標などを示すマップ情報、各可動コンテナの配置場所を示す可動コンテナ配置情報、などが格納されており、必要に応じてRAMに読み出される。なお、自走式移動ロボットにおいて移動ルートを決定する場合は、上記決定プログラムや、マップ情報、可動コンテナ配置情報などを保持する必要はない。
【0062】
また、通信手段は、選択受付部から選択された可動コンテナIDの情報などを受信したり、自走式移動ロボットに対して可動コンテナを動かす命令を送信したりする。
【0063】
上記において、荷物画像保持部や選択受付部、命令出力部は別々のハードウェアによって実現される例を示したが、これらの各部の全部又は一部が同一のハードウェアによって実現される例も可能である。例えば、荷物画像保持部と命令出力部を一の集中制御装置の機能として実現することも可能であるし、選択受付部と命令出力部を一の利用者端末装置の機能として実現することも可能である。
【0064】
<具体的な処理の流れ>
(収納処理)
図8は、本実施形態の収納システムの収納処理の流れの一例を示す図である。まず、利用者端末において収納要求を受け付け、集中制御端末に対して収納要求を送信する(収容要求送信ステップ)。
【0065】
次に、集中制御端末は、収納要求を受信すると、各可動コンテナの荷物収容状況の画像を利用者端末に対して送信する(荷物収容画像送信ステップ)。
【0066】
次に、利用者端末(選択受付部)は、各可動コンテナの荷物収容状況の画像を表示し、荷物を収容する可動コンテナの選択を受け付ける(選択受付ステップ)。次に、利用者端末(選択受付部)は、集中制御端末に対して選択された可動コンテナのIDを送信する(選択コンテナID送信ステップ)。
【0067】
次に、集中制御端末(命令出力部)は、選択された可動コンテナIDを含めた移動命令を自走式移動ロボットに対して送信する(移動命令送信ステップ)。
【0068】
次に、自走式移動ロボットは、移動命令に基づいて選択された可動コンテナを収納室内から居室へと移動させる(移動ステップ)。次に、自走式移動ロボットは、被収納物が可動コンテナに収容されたことを示す収容完了通知を自身が備える操作入力手段又は利用者端末の操作入力手段を介して受け付ける(収容完了通知受付ステップ)。次に、自走式移動ロボットは、可動コンテナ内の荷物収容状況を撮影するための命令を撮影部に送信する(撮影命令送信ステップ)。
【0069】
次に、撮影部は、撮影命令を受信すると、可動コンテナの内部を撮影する(撮影ステップ)。次に、撮影部は、撮影した荷物収容状況の画像をその可動コンテナIDと関連付けて集中制御端末(荷物画像保持部)に対して送信する(撮影画像送信ステップ)。
【0070】
次に、自走式移動ロボットは、撮影後において可動コンテナを収納室内のもとの配置場所に戻す(収納ステップ)。
【0071】
次に、集中制御端末(荷物画像保持部)は、選択された可動コンテナの荷物収容状況の画像を受信すると、その可動コンテナの荷物収容状況の画像データを追加する(画像データ追加ステップ)。
【0072】
(移動手順の決定処理)
図9は、一又は複数の可動コンテナの移動手順の決定処理の流れの一例を示す図である。当該移動手順の決定処理は、集中制御端末(命令出力部)にて行ってもよいし又は自走式移動ロボットにて行ってもよい。また、両装置で処理を分担して行うことも可能である。
【0073】
まず、S1において、選択受付部にて選択された可動コンテナ(以下、利用者選択コンテナという)の収納室内の位置を、収納室内の配置情報に基づいて取得する(選択コンテナ位置取得ステップ)。ここで、選択受付部にて連続して複数の可動コンテナが選択された場合は、複数の可動コンテナの収納室内の各位置を取得する。
【0074】
次に、S2において、利用者選択コンテナの収納室内の位置から居室へと移動させるための一又は複数の経路候補から一の経路を選択する(経路選択ステップ)。なお、選択受付部にて連続して複数の可動コンテナが選択された場合は、各利用者選択コンテナについて一又は複数の経路候補から一の経路を選択する。
【0075】
次に、S3において、選択された経路において、一又は複数の利用者選択コンテナの移動経路上にある他の可動コンテナの総数を算出する(他可動コンテナ数算出ステップ)。なお、当該算出処理に代えて、移動経路上にある他の可動コンテナの慣性指数(慣性質量に比例する指数)を足し合わせた和(総慣性指数)を算出する処理を行うことも可能である。
【0076】
次に、S4において、S2とS3の処理を行っていない他の経路候補が残っているか否か判断し、完了していない場合はS2に戻る(他候補確認ステップ)。なお、選択受付部にて連続して複数の可動コンテナが選択された場合は、異なる組み合わせの移動経路候補が残っていないか否について判断し、完了していない場合はS2に戻る。
【0077】
次に、S5において、S2〜S4の処理に基づいて移動経路上にある他の可動コンテナの総数又は総慣性指数が最小となる移動経路を実際の移動経路として決定する(経路決定ステップ)。
【0078】
次に、S6において、決定された移動経路において利用者選択コンテナ及び他の可動コンテナを移動させる順番及び移動させる位置を収納室内の配置情報に基づいて決定する(移動手順決定ステップ)。
【0079】
図10は、図9の処理により決定された移動手順に基づいて、選択部にて選択された一つの可動コンテナを収納室から居室へ移動させる様子を示す図である。この図に示すように、「選択された可動コンテナ」5Aを「収納室」11から「居室」12へ「自走式移動ロボット」4により移動させる際に、複数の移動経路の候補が存在する。この図の例では、複数の移動経路のうち、「一の移動経路」R1の上にある他の可動コンテナの総数が最も少なくなっているため(総数=1)、当該移動経路を実際の移動経路として決定している。
【0080】
図11は、図9の処理により決定された移動手順に基づいて、選択部にて選択された二つの可動コンテナを収納室から居室へ移動させる様子を示す図である。この図に示すように、「選択された可動コンテナ」5A、5Bを「収納室」11から「居室」12へ「自走式移動ロボット」4により移動させる際に、複数の移動経路の候補が存在する。この図の例では、複数の移動経路のうち、「一の移動経路」R2の上にある他の可動コンテナの総数が最も少なくなっているため(総数=2)、当該移動経路を実際の移動経路として決定している。
【0081】
<効果>
本実施形態の構成をとる本発明により、利用者はいずれの可動コンテナにおいて目的とする物品が収容されているかを容易に把握することが可能になる。また、自走式移動ロボットが可動コンテナを収納室内から居室まで移動させるため、利用者の作業負担をさらに軽減することが可能になる。
【0082】
<<実施形態2>>
【0083】
<システムの概要>
図12は、本実施形態の住宅の収納システムのシステム概要を示す図である。この収納システムにおいて、選択受付部2により画像に付加された情報を検索キーとした画像の検索要求を受け付けた場合、検索要求105が荷物画像保持部7に送信される。荷物画像保持部7は、検索要求に応じて所定条件を満たす画像を検索し、一又は複数の検索結果の画像106を選択受付部2に通知する。そして、利用者から特定の荷物収容状況の画像が選択された場合、選択情報101が命令出力部3に送信され、命令出力部3は自走式移動ロボット4に対して移動命令102を送信し、選択画像に関連付けられた可動コンテナ5を収納室11から居室12に移動させる。そして、物品を収納後、撮影部6が収容状況の画像を撮影し、画像情報103を荷物画像保持部7に送信する。画像情報は可動コンテナIDと関連付けて荷物画像保持部7にて保持される。
【0084】
<システムの構成>
図13は、本実施形態の「住宅の収納システム」の機能ブロックを示す図である。この図にあるように、「住宅の収納システム」1は、「選択受付部」2と、「命令出力部」3と、「自走式移動ロボット」4と、「可動コンテナ」5と、「撮影部」6と、「荷物画像保持部」7と、から構成され、「荷物画像保持部」7は、「付加情報保持手段」71と、「画像検索手段」72と、「検索結果通知手段」73とを有し、「選択受付部」2は、「検索要求受付手段」21を有する。以下、「付加情報保持手段」、「画像検索手段」、「検索結果通知手段」、「検索要求受付手段」について説明する。
【0085】
(付加情報保持手段の機能)
「付加情報保持手段」は、荷物収容状況の画像とその画像に付加された情報である付加情報とをさらに関連付けて保持する機能を有する。ここで、付加情報としては、収納日時や収納者、被収納物の種別、被収納物の重要度、被収納物の収納条件、取り出し予定日時、廃棄予定日時、キーワードなどが挙げられる。
【0086】
荷物画像保持部は、付加情報保持手段の機能を利用して、例えば図14に示すようなテーブル情報を保持している。この図の例では、荷物収容状況の画像の識別子(ファイル名など)とその荷物を収容している可動コンテナのIDを、その画像の撮影日時、被収容物の種別、収納者、取り出し予定日時、キーワードと関連付けて保持している。この図に示しているように、同一の可動コンテナであっても、異なる日時に撮影された荷物収容状況の画像はそれぞれ保持されている。
【0087】
付加情報保持手段にて保持される付加情報は、利用者端末や自走式移動ロボットが備える操作入力手段を介して受け付けることが可能である。具体的には、特定の可動コンテナに対する物品の収容が完了し、操作入力手段を介して利用者による収容完了通知を受け付ける際に、合わせて付加情報の入力を受け付けて、可動コンテナのIDと共に荷物画像保持部(付加情報保持手段)に送信する。
【0088】
荷物画像保持部(付加情報保持手段)は、撮影部から受信する上記可動コンテナの荷物収容状況の画像と、上記付加情報を関連付けて保持する。なお、利用者端末(選択受付部)にて物品を収容する可動コンテナの選択を受け付ける際に、合わせて付加情報の入力を受け付けることも可能であるし、必要に応じて利用者端末にて付加情報の更新を行うことも可能である。
【0089】
また、付加情報は、例えば荷物画像保持部が備える操作入力手段を介して更新することも可能である。具体的には、荷物画像保持部が備える表示手段にて、図14に示すようなテーブルを表示し、操作入力手段を介して付加情報の入力を受け付ける。
【0090】
また、荷物画像保持部は、撮影部から受信する上記可動コンテナの荷物収容状況の画像に対して画像認識処理を行い、当該荷物画像に含まれる被収納物の種類、色、大きさ等を付加情報として抽出し、当該付加情報を荷物収容状況の画像と関連付けて自動登録する手段(画像認識登録手段)を有していてもよい。
【0091】
また、収納室又は居室の床面の一部に可動コンテナの重量を検知する床面重量検知部が設けられている場合や、自走式移動ロボットに可動コンテナの動きにくさ(慣性質量等)を検知する慣性質量検知部が備えられている場合などは、荷物画像保持部は、可動コンテナの重量等の情報を付加情報として上記検知部などから受信し、当該付加情報を荷物収容状況の画像と関連付けて自動登録する手段(登録手段)を有していてもよい。
【0092】
さらに、可動コンテナの重量等の情報から、可動コンテナの被収容物の種別(重量物、軽量物等)を決定し、荷物収容状況の画像と関連付けて付加情報として自動登録してもよい。また、可動コンテナの重量等の情報から可動コンテナの状態変化(可動コンテナから物が取り出された、追加された等)を検出し、当該状態変化の情報を付加情報として荷物収容状況の画像と関連付けて自動登録してもよい。
【0093】
(画像検索手段の機能)
「画像検索手段」は、前記付加情報を検索キーとした画像の検索要求に応じて検索する機能を有する。当該検索要求は、所定の付加情報と関連付けられた画像の検索を要求するものである。具体的には、特定の収納日時(例えば、1年前から現在日時までの収納日時など)の情報が付加された画像の検索要求や、特定の収納者(例えば、父など)の情報が付加された画像の検索要求、特定の被収納物の種別(例えば、書籍類など)の情報が付加された画像の検索要求、被収納物に関する特定の種類、色、大きさ、重量等の情報が付加された画像の検索要求、可動コンテナに関する特定の状態変化の情報が付加された画像の検索要求などである。
【0094】
画像の検索は、各可動コンテナの最新の荷物収容状況の画像のみを対象とすることも可能であるが、基本的には各可動コンテナの最新ではない過去の荷物収納状況の画像を含めて行う。例えば、一の可動コンテナに対して「長男」が「雑誌」を収容した後に、「父」が異なる日時において「風呂敷」を収容することもあり、「長男」は最新の荷物収納状況の画像からでは「雑誌」を最新の画像からでは確認できない可能性もあるためである。
【0095】
(検索結果通知手段の機能)
「検索結果通知手段」は、検索結果を選択受付部に通知する機能を有する。ここで、検索結果とは、所定の検索条件を満たす画像情報をいうものである。なお、検索条件を満たす画像のデータ量が所定以上ある場合は、一部の画像のみの情報を選択受付部に通知し、他の画像に関しては選択受付部からの要求に応じて通知する構成も可能である。
【0096】
(検索要求受付手段の機能)
「検索要求受付手段」は、前記付加情報を検索キーとした画像の検索要求を受け付ける機能を有する。検索要求受付手段は、画像の検索要求を受け付けると、荷物画像保持部の画像検索手段に対して検索要求の情報を送信し、検索結果の情報を荷物画像保持部の検索結果通知手段から受信する。
【0097】
検索要求受付手段は、一又は複数の検索キー(収納日時、収納者、被収納物の種類など)を表示手段にて表示し、検索キーの内容を決定する操作(「収納者」は「父」であり、「被収納物の種類」は「書籍類」など)を操作入力手段にて受け付ける構成が考えられる。検索キーの内容を決定する操作は、選択形式によって行うことも可能であるし、文字入力や音声入力によって行うことも可能である。
【0098】
<具体的な処理の流れ>
(画像の検索処理)
図15は、収納システムの画像の検索処理の流れの一例を示す図である。まず、利用者端末において、収納要求を受け付け、集中制御端末に対して収納要求を送信する(収容要求送信ステップ)。
【0099】
次に、集中制御端末は、収納要求を受信すると、一又は複数の検索キー候補の情報を利用者端末に対して送信する(検索キー情報送信ステップ)。
【0100】
次に、利用者端末は、一又は複数の検索キー候補の情報を表示し、一又は複数の検索キーに関する内容入力を受け付ける(検索内容入力受付ステップ)。さらに、利用者端末は検索キーの内容情報を集中制御端末に対して送信する(検索内容送信ステップ)。
【0101】
次に、集中制御端末は、決定された検索キーの内容に基づいて条件を満たす荷物収容状況の画像を検索する(画像検索ステップ)。さらに、集中制御端末は、検索結果である一又は複数の可動コンテナの荷物収容状況の画像を利用者端末に対して送信する(検索結果画像送信ステップ)。
【0102】
次に、利用者端末は、検索結果である一又は複数の可動コンテナの荷物収容状況の画像を表示し、荷物を収容する可動コンテナの選択を受け付ける(選択受付ステップ)。以後の処理は、実施形態1の図で説明したものと同様であるから、説明を省略する。
【0103】
<効果>
本実施形態の構成をとる本発明により、荷物収容状況の画像に付加された情報に基づいて、収納物の収納場所を特定し、当該収納物を収容する可動コンテナを自走式移動ロボットにより取り出すことが可能である。
【符号の説明】
【0104】
1…住宅の収納システム、2…選択受付部、3…命令出力部、4…自走式移動ロボット、5…可動コンテナ、6…撮影部、7…荷物画像保持部、11…収納室、12…居室、13…床面重量検知部、21…検索要求受付手段、41…牽引部材、42…撮影手段、51…台車、52…コンテナ、53…連結部材、71…付加情報保持手段、72…画像検索手段、73…検索結果通知手段、101…選択情報、102…移動命令、103…画像情報、104…選択候補画像情報、105…検索要求、106…検索結果の画像、0601・0701…MPU、0602・0702…RAM、0603・0703…不揮発性メモリ、0604・0704…通信手段、0605…ステッピングモータ、0606…モータI/F、0607…バッテリ、0608…ICタグリーダ、0705…撮像手段、0706…LED、0707…LEDコントローラ、0708…受電手段
【特許請求の範囲】
【請求項1】
住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理する住宅の収納システムであって、
可動コンテナを収納室と居室の間で移動させる自走式移動ロボットと、
可動コンテナに被収納物を収容した後に、可動コンテナ内の収容状況を撮影する撮影部と、
荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する荷物画像保持部と、
荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける選択受付部と、
選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する命令出力部と、
を有する収納システム。
【請求項2】
荷物画像保持部は、
荷物収容状況の画像とその画像に付加された情報である付加情報とをさらに関連付けて保持する付加情報保持手段と、
前記付加情報を検索キーとした画像の検索要求に応じて検索する画像検索手段と、
検索結果を選択受付部に通知する検索結果通知手段と、
を有し、
選択受付部は、前記付加情報を検索キーとした画像の検索要求を受け付ける検索要求受付手段を有し、
を有する請求項1に記載の収納システム。
【請求項3】
撮影部の全部又は一部は、前記自走式移動ロボットに備え付けられている請求項1又は2に記載の収納システム。
【請求項4】
撮影部の全部又は一部は、前記収納室の出入口の天井付近に配置されている請求項1から3のいずれか一に記載の収納システム。
【請求項1】
住宅内に設けた収納室に可動コンテナを配置して住宅内の被収納物を収納管理する住宅の収納システムであって、
可動コンテナを収納室と居室の間で移動させる自走式移動ロボットと、
可動コンテナに被収納物を収容した後に、可動コンテナ内の収容状況を撮影する撮影部と、
荷物収容状況の画像とその荷物を収容している可動コンテナIDを関連付けて保持する荷物画像保持部と、
荷物画像保持部に保持されている荷物収容状況の画像の選択を受け付ける選択受付部と、
選択された荷物収容状況の画像に対応する可動コンテナIDを取得して該当する可動コンテナを収納室と居室の間で移動させるために一又は二以上の可動コンテナを動かす命令を前記自走式移動ロボットに対して出力する命令出力部と、
を有する収納システム。
【請求項2】
荷物画像保持部は、
荷物収容状況の画像とその画像に付加された情報である付加情報とをさらに関連付けて保持する付加情報保持手段と、
前記付加情報を検索キーとした画像の検索要求に応じて検索する画像検索手段と、
検索結果を選択受付部に通知する検索結果通知手段と、
を有し、
選択受付部は、前記付加情報を検索キーとした画像の検索要求を受け付ける検索要求受付手段を有し、
を有する請求項1に記載の収納システム。
【請求項3】
撮影部の全部又は一部は、前記自走式移動ロボットに備え付けられている請求項1又は2に記載の収納システム。
【請求項4】
撮影部の全部又は一部は、前記収納室の出入口の天井付近に配置されている請求項1から3のいずれか一に記載の収納システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−240826(P2012−240826A)
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願番号】特願2011−115173(P2011−115173)
【出願日】平成23年5月23日(2011.5.23)
【出願人】(307042385)ミサワホーム株式会社 (569)
【Fターム(参考)】
【公開日】平成24年12月10日(2012.12.10)
【国際特許分類】
【出願日】平成23年5月23日(2011.5.23)
【出願人】(307042385)ミサワホーム株式会社 (569)
【Fターム(参考)】
[ Back to top ]