
受け入れ容器を充填するための方法および装置
【課題】供給される予定の物質に可能な限り少ない量の応力しか与えず、かつ最良の精度を提供するように、貯蔵器からの自由流れ物質の所定の目標量で受け入れ容器を充填する方法および装置の提供。
【解決手段】自由流れ物質の測定される用量を受け入れ容器100内に充填するように働く投与量分配装置300を使用して、受け入れ容器100を貯蔵器200からの物質の所定の目標質量で充填する方法であって、投与量分配装置300が、貯蔵器200から受け入れ容器100内への質量流量の可変設定を可能にする弁310を備え、充填サイクル中の少なくとも1つの時間tで、充填サイクルの終了時に受け入れ容器100内に存在することが期待される質量の推定を実施し、目標質量より小さい場合、質量流量を伴う開口が差時間区間だけより長く維持されるであろうように、かつ/または時間tでの質量流量が増加するように弁310を制御する方法。
【解決手段】自由流れ物質の測定される用量を受け入れ容器100内に充填するように働く投与量分配装置300を使用して、受け入れ容器100を貯蔵器200からの物質の所定の目標質量で充填する方法であって、投与量分配装置300が、貯蔵器200から受け入れ容器100内への質量流量の可変設定を可能にする弁310を備え、充填サイクル中の少なくとも1つの時間tで、充填サイクルの終了時に受け入れ容器100内に存在することが期待される質量の推定を実施し、目標質量より小さい場合、質量流量を伴う開口が差時間区間だけより長く維持されるであろうように、かつ/または時間tでの質量流量が増加するように弁310を制御する方法。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、本明細書では目標容器とも呼ばれる受け入れ容器を、貯蔵器からの自由流れ物質の所定の目標量で充填する方法および装置に関する。
【背景技術】
【0002】
この種の充填装置は、例えば薬剤分野で必要とされる少量の投与量を分配するのに特に使用される。この受け入れ容器はしばしば、この物質を所与の仕様に従って引き続きさらに処理できるように、投与量分配装置から送られる物質の質量を量るために秤の上に配置される。
【0003】
物質のうちのある測定される用量が分配される予定のこの物質は、例えば投与量分配ヘッドを装備する原料容器または貯蔵器内に保持される。次に目標は、充填工程の終了時にこの物質の所定の目標質量が受け入れ容器内に存在するような方法で、投与量分配装置の開口部を介して投与量物質を供給することである。重要な点は、受け入れ容器内に実際に存在する質量ができるだけ正確に所定の目標質量に合致すべきであり、かつ目標質量が正確に画定されることである。この充填工程ができるだけ最短時間内に行われることもさらに重要である。
【0004】
知られた最新技術は、分配される物質の体積測定に基づく投与量分配方法を提供する。密度ρの物質、弁の可変開口断面積Aおよび結果として得られる物質の供給流速uに対し、受け入れ容器内の物質の質量mzは、
【0005】
【数1】

【0006】
として得られる。特にこの供給流速uは、例えば弁の開口面積A、貯蔵器内の物質の充填レベル高さhから結果として生じる静圧、例えば粉体粒サイズdなどの物質のレオロジー特性などの多くの影響要因に支配される。特にこのレオロジー特性はしばしば非常に複雑であり、限定される精度でしか知られていない影響要因に支配される。例えば、流れ工程の開始時にビンガム(Bingham)物質で起きる遅延流れは、考慮に入れるのが困難である。特に、微粉砕物質の投与量充填では、各々の粒の粒サイズ、湿分含有量および表面特性などの要因が主要な重要事項である。
【0007】
投与量充填工程中に貯蔵器から受け入れ容器内へ供給される目標質量の精度を最適化する方法は、米国特許第6,380,495号に開示されている。この参考文献による方法では、貯蔵器と受け入れ容器の間に配置される弁が、最初にその最大開口にある時間開いて保持され、次いで唐突に閉じられる。充填工程中、この受け入れ容器内の物質は秤によって監視される。この場合、弁を閉じるのにある長さの時間が必要であり、かつ充填工程中弁と受け入れ容器の間を自由落下している材料も存在するので不正確さが起きる。結果として、弁の唐突な閉鎖の時に秤によって指示される質量の量は、充填工程の終了後に受け入れ容器内に存在する質量の最終量より少ない。この誤差は、最小二乗法の再帰的方法を介して求められ、充填サイクルの引き続く繰り返しで修正される。ここでそれ自体存在する問題点は、弁の唐突な閉鎖である。この唐突な閉鎖中、分配されている物質は追加の力に曝される。特に、例えば精製化学製品または薬剤物質などの感受性の高い物質が分配されているとき、これらの物質をできるだけ優しく取り扱いかつできるだけ少ない応力に曝すことが重要である。そうではない場合、物質特性に所望されない変化が生じる、すなわち物質が損なわれる可能性がある。この唐突な閉鎖は、材料の締め固めに繋がる可能性もある。この締め固めは、材料特性、その結果材料の流れ特性を変化させる可能性があり、それが充填工程の再現性に悪影響を与えるであろう。さらなる問題点は、最初の充填サイクル中、先行する充填サイクルから入手可能なデータが全く存在しないことにある。したがって、最初の充填サイクルに対して修正を行うことは不可能であり、それが結果として得られる充填量に誤差を生じさせる可能性がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第6,380,495号
【発明の概要】
【発明が解決しようとする課題】
【0009】
したがって、本発明の目的は、供給される予定の物質に可能な限り少ない量の応力しか与えず、かつ最良の精度を提供するように、貯蔵器からの自由流れ物質の所定の目標量で受け入れ容器を充填する方法および装置を提供することである。
【課題を解決するための手段】
【0010】
この目的は独立特許請求項に示めされる特徴を有する方法および装置によって達成される。さらに有利な実施形態は、従属請求項に見ることができる。
本発明による方法および本発明による装置は、物質の測定される用量を受け入れ容器内に充填するように働く投与量分配装置を使用して、受け入れ容器を貯蔵器からの自由流れ物質の所定の目標質量mzで充填する機能を実施する。この投与量分配装置は、貯蔵器から受け入れ容器内への質量流量
【0011】
【数2】
【0012】
の可変設定を可能にする弁を装備する。この投与量分配装置はさらに、充填サイクルの開始から経過した時間tを求めるためのタイミング機能、受け入れ容器内に存在する物質の質量mを求めるための秤、および弁を制御するための弁制御モジュールを有する制御器ユニットを備える。この制御器ユニットは、推定モジュールおよび修正モジュールをさらに含み、
−充填サイクル中の少なくとも1つの時間tに、推定モジュールは、時間t2のときの充填サイクルの終了時に受け入れ容器内に存在することが期待される質量
【0013】
【数3】
【0014】
の、時間tから弁があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、充填サイクルが時間t2で完了するという仮定に基づく推定を実施し、
−修正モジュールは、時間tで推定された質量
【0015】
【数4】
【0016】
を目標質量mzと比較し、推定質量
【0017】
【数5】
【0018】
が目標質量mzより小さい場合、時間tのとき存在する質量流量
【0019】
【数6】
【0020】
を伴う開口が、差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの質量流量
【0021】
【数7】
【0022】
が増加するように弁を制御する。
この構成では、異なる影響要因が修正モジュールによって補償されるので有利である。可能性のある影響要因には、例えば流れ工程の開始での遅延、物質の特定のレオロジー特性、貯蔵器内の材料の充填レベル、弁の幾何学的特性、または粒サイズなどの材料特性がある。
【0023】
本発明はさらに、分配工程を自動化する可能性を提供するので、有毒な物質の用量を分配するのに有利であることが分かる。これはこの工程の従事者が有毒物質と万一接触するリスクを低減する。
【0024】
この文脈での用語「閉鎖プロフィール(closing−down profile)」は、充填サイクル中の任意の選ばれた時間tから時間t2での充填サイクルの終了までの質量流量
【0025】
【数8】
【0026】
の減少を呼ぶ。充填サイクルの終了のときの時間t2で、質量mのさらなる量が全く弁から流れ出ないようにはるかに十分に弁は閉じられているが、この弁は唐突な方式で閉じられてはいない。閉鎖工程中のこの質量流量
【0027】
【数9】
【0028】
のプロフィールは、任意の形状のものであることができる。しかしながら簡単のために、ほとんどの場合で質量流量
【0029】
【数10】
【0030】
は、弁の閉鎖中直線的に減少することが仮定される。
特別な好みで、この質量流量
【0031】
【数11】
【0032】
の可変設定は、弁の可変開口断面積Aを使用して実現することができる。
特に、この質量流量
【0033】
【数12】
【0034】
の可変設定は、可変回転数を有するコンベアスクリューを使用して実現することができる。
理想的な方法では、この質量流量
【0035】
【数13】
【0036】
の可変設定は、可変回転数を有する回転スターラー機構を使用して実現することができる。
本明細書の文脈では、弁を開く工程は、質量流量
【0037】
【数14】
【0038】
の連続的な増加の意味を伴うと理解されたい。質量流量
【0039】
【数15】
【0040】
のこの増加は、例えば弁の開口断面積Aを拡大させること、コンベアスクリューの回転数の増加させること、および/または回転スターラー機構の回転数を増加させることによって達成することができる。
【0041】
推定モジュールは、先行する充填サイクルからのデータを使用することが好ましい。関連するデータは、例えば充填サイクルを完了させるのに必要とされる時間t2に関する情報、開口断面積の時間積分値
【0042】
【数16】
【0043】
または投与量分配工程の終了時に受け入れ容器内に存在する実際の重量m(t2)を含むことができる。特に重要な要因は、重量等価と呼ばれかつ開口断面積の時間積分値と投与量分配工程の終了時に受け入れ容器内に存在する実際の重量m(t2)から構成される数式
【0044】
【数17】
【0045】
である。何故ならばこの式は、充填サイクルの開始時の遅延流れおよび貯蔵器内に収容される物質の減少する充填レベルhに伴う静圧の減少などの流れ特性を暗黙のうちに示すからである。したがって、例えば弁の幾何学的形状、物質の密度ρおよび物質の流れの遅延は、重量等価faに重要な影響を有する。例えば微粉砕物質の場合、粒サイズ、粒サイズ分布、粒の形状および粒の表面特性がこの重量等価faに入る。弁が開いたときの個々の粒の位置も、重量等価faに対する影響を有する。これらの理由から、重量等価faは、重量m(t2)を推定するのに使用されるのが好ましい。先行する充填サイクルから得られたこれらの流れパラメータの値は、記憶モジュール、特にRFID認識票(無線周波数ベース認識素子)内に記憶し、引き続く充填サイクルで使用することができる。RFID認識票を貯蔵器に取り付けることは、これが貯蔵記憶器内の物質がRFID認識票内に記憶されるデータに確実に直接結合されるので特に有利である。
【0046】
最初の充填サイクルでは、先行する充填サイクルからのデータは未だ全く利用できない。したがって、所望の目標質量mzを超過するのを避けるために、最初の充填サイクルをゆっくりと実施する必要がある。最初の充填サイクル後は、引き続く充填サイクル用の推定が基づくべき利用できるデータが存在する。
【0047】
充填サイクルで弁が正確に一度開かれかつ正確に一度閉じられる場合は、特に有利である。特に、感受性の高い物質の分配では、このようにすると分配物質、例えば薬剤分野または精製化学製品の製造で使用される種類の物質が可能な限り少ない量の応力にしか曝されないので、この点が支配的に重要になる。弁が数回開閉される場合は、分配される予定の物質、特に粉体の粒は、物理的特性の所望されない変化に繋がり、その結果物質に損傷を引き起こす可能性のある剪断力に曝されるであろう。
【0048】
同様に、弁の滑らかな、連続的な開口および閉口動作が、物質の優しい取り扱いに寄与する。この文脈での連続的な開口動作は、弁の開口断面の連続的な広がりを意味すると理解されたい、すなわち、
t≦t*の任意の値に対してA(t)≦A(t*)。
【0049】
同じように、弁の閉鎖では、弁の開口断面は連続的により小さくされる、すなわち、
t≦t*の任意の値に対してA(t)≧A(t*)。
開口および閉口工程を簡単化するために、弁は段階的動作で開きかつ閉じる。
【0050】
充填工程中、秤が目標質量mzの3分の1に少なくとも等しい、目標容器内の物質に対する質量mの量を測定するときの時点で、推定モジュールを最初に使用するのが有利である。このようにすると、弁は修正なしで比較的速い速度でプリセットされた方法で開くことができ、目標質量mzの最初の部分を比較的迅速に充填することができる。充填工程の終了時に受け入れ容器内に存在する物質の量ができるだけ正確に目標質量mzに合致するのを確実にするために、充填工程の終了に向かって物質を受け入れ容器内にゆっくりしたかつ制御される方式で充填するのがより有利になる。この理由で、修正モジュールを使用する修正が目標質量mzの最後の3分の2を充填する段階でのみ実施される場合、かつ/または修正モジュールが弁の閉鎖の段階でのみ使用される場合も有利である。
【0051】
修正モジュールを繰り返し使用することは、これによって推定質量と受け入れ容器内に実際に存在する質量との間の差を繰り返し調整するのが可能になるので、好ましい効果を有する。特に質量流量が既に比較的低いとき、充填工程の終了に向かって、この修正モジュールを繰り返し適用すべきである。これによって、目標質量mzに非常に正確に接近し、受け入れ容器内に供給される過剰量の質量が全くないことを確実にすることができる。それによって目標質量mzをオーバーシュートするリスクは避けられる。
【0052】
本発明による方法は、特に微粉砕のまたは液体物質用量の充填に用途を見出している。液体物質は普通は複雑なレオロジー特性を有し、多くの場合非ニュートン性質のものである。問題の目標質量は、通常0.5mgから5000mgの間の範囲内にある。しかしながら、この方法でより少ないまたはより多くの用量を分配することも可能である。
【0053】
有利な実施形態では、この弁は円形の開口断面を有する出口開口部と閉鎖要素を有し、この出口開口部および閉鎖要素は共通軸上に配置され、この閉鎖要素はこの共通の軸周りをハウジングに対して回転可能であり、かつ共通の軸に沿って出口開口部内に入りかつ出る並進移動が可能であり、かつこの閉鎖要素は、閉鎖要素の並進移動を介して弁が開閉できるように、円筒状の閉鎖部分および供給部分を有する。
【0054】
前述の配置で、閉鎖要素の段階的並進移動を介して弁を開閉することが有利である。
この閉鎖要素の供給部分が可変開口断面積Aを有する場合は有利である。このようにすると、弁を通り移動する質量流量
【0055】
【数18】
【0056】
の大きさは、弁の閉鎖要素の位置と直接的に関連する。理想的には、閉鎖要素の長さ方向での並進移動位置Lは弁の開口断面積と直接的に関連する、すなわち、A=A(L)である。弁の形態に応じて、閉鎖要素の並進移動位置L、開口断面積Aと質量流量
【0057】
【数19】
【0058】
の間に直接的な比例関係が存在する可能性がある:
【0059】
【数20】
【0060】
しかしながら、この種の直接的な比例は、例えば粒サイズなどの材料特性、流れ工程の開始での遅延または同様な要因も直接的な比例に対して逆に作用するので、実際の状況では通常達成することはできない。それでも、より大きな開口断面積はより大きな質量流れを伴うことは、一般的に見なすことができる。
【0061】
理想的には、弁を開閉するために、この閉鎖要素は同じ大きさの並進ステップΔLで移動する。したがって、この開閉段階は、開口断面積Aの同じ時間プロフィールに沿って進み、それによって弁の開段階で起きる誤差は、弁の閉段階で起きる誤差によって補償される。例えば、粉体粒サイズおよび/または弁の幾何学的形状に起因して、閉鎖要素の並進移動位置L1を通過するまで物質が流れ始めない場合は、閉段階で並進移動位置L1を再度通過した後、弁から外に供給される材料は最早ないであろうことを仮定することができる。
【0062】
可変回転数ωで回転させることができる閉鎖要素を使用することは有利であり、この回転数ωは、弁を通過する質量流量
【0063】
【数21】
【0064】
と直接的に相互関連する。
この弁がタッピング機構を装備する場合はさらに有利であり、タップは可変タッピング周波数Fで既に開いている弁に向けられる。そのような構成では、タッピング周波数Fは弁を通過する質量流量
【0065】
【数22】
【0066】
と直接的に相互関連し、タッピング周波数の増加は質量流量
【0067】
【数23】
【0068】
の増加に繋がる。このタッピングは、閉鎖要素の軸の方向ならびに軸に直角な方向であることができる。
さらに、このタップは弁の閉鎖要素に、かつ/または弁のハウジングに向けることができる。
【0069】
この回転移動ならびにタッピングは、弁の詰まりおよび/または粉体ブリッジの形成がそれによって妨げられる有益な効果を有する。このようにすると、粉体の能力を低くまで自由に保存しまたは高めることが可能になる。
【0070】
制御器ユニットは、部分的に、またはその全体をコンピュータベースのシステムとして実現することができる。
受け入れ容器を充填するための本方法および装置は、添付の図面に概略的に図示する例によって、本明細書でこの後で説明する。
【図面の簡単な説明】
【0071】
【図1】本発明による、受け入れ容器の充填のための装置の概略図である。
【図2】弁ハウジングおよび閉鎖要素を有する弁の図である。
【図3】充填サイクルの理想化された時間プロフィールを示すグラフである。
【図4】弁がその最大開口断面積Amaxまで開いた、充填サイクルの別の理想化された時間プロフィールを示すグラフである。
【図5】本発明による、異なる理想化された充填サイクルに対する開口断面積の時間プロフィールを示すグラフである。
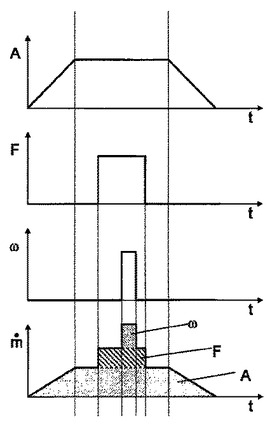
【図6】開口断面積A、タッピング周波数Fおよび回転数ωが質量流量
【0072】
【数24】
【0073】
に対して有する影響を、それぞれ、示すグラフである。
【発明を実施するための形態】
【0074】
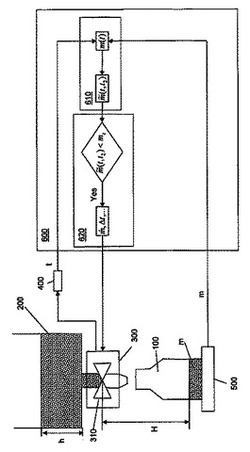
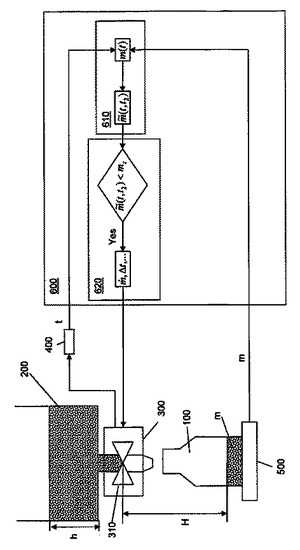
図1は、投与量分配装置300によって、貯蔵器200内に充填レベルhまで保持される物質で充填することができる、受け入れ容器100を示す。この投与量分配装置300は、充填サイクルの開始からの経過時間を求めることができ、かつ測定された時間を示す信号を制御器ユニット600に伝送できる、タイミング装置400に結合されている。この受け入れ容器は、受け入れ容器100内に存在する物質の重量を求めることができるように、秤500の上に配置される。測定される重量または質量を示す信号は同様に、制御器ユニット600に伝送することができる。制御器ユニット600では、その結果が投与量分配サイクルの開始からのある経過時間tのときに存在する質量m(t)を示すように、この時間信号および質量信号が互いに結合される。
【0075】
理想的には、弁310は受け入れ容器100が所望の目標質量mzの半分を保持するまで、ますます開き続けるであろう。やはり理想的な場合では、この弁310は引き続き、所望の目標質量の次の半分が受け入れ容器100内に供給されている間に、再び閉鎖されるであろう。この工程で、弁310は、できるだけ最短時間を充填サイクルのために取るために、できるだけ早くかつ広く開きかつ閉じられるべきである。これに伴う問題点は、時間tに受け入れ容器100内に存在する質量m(t)が知られていないことであり、何故ならば、秤500によって生じる重量測定信号がいくつかの要因に起因して遅れるからである。例えば、弁310と受け入れ容器100の間の高さ間隔H内を自由落下している質量、より具体的には受け入れ容器100内の物質の表面レベルは、秤500によって登録されない。さらにこの秤は、安定した重量測定結果を生じるのにある量の時間を必要とする。これらの不正確性によって、時間tでの受け入れ容器100内に存在する質量m(t)を制御器ユニット600内に含まれる推定モジュール610を使用して推定すること、かつ推定モジュール610から得られたこのデータに基づいて、同様に制御器ユニット600内に含まれる修正モジュール620を使用して弁の制御に修正を加えることが必要となる。
【0076】
推定モジュール610から、充填サイクルの終了時の時間t2に受け入れ容器100内に存在すると予想される質量
【0077】
【数25】
【0078】
の推定値が充填サイクル中の少なくとも1つの時間tで得られ、この推定値は、時間tから進んで弁310が仮定した閉鎖プロフィールに従って閉じられているという仮定に基づいている。修正モジュール620は、時間tに対して推定した質量
【0079】
【数26】
【0080】
を目標質量mzに対して比較し、充填サイクルの終了時に対する現行の質量推定値
【0081】
【数27】
【0082】
が目標質量mzより小さい場合は、弁(310)は、時間tで存在する質量流量
【0083】
【数28】
【0084】
を伴う開口が差異時間区間Δtだけより長く維持されるであろうように、あるいは/または時間tでの質量流量
【0085】
【数29】
【0086】
が増加するであろうように制御される。質量流量
【0087】
【数30】
【0088】
のこの増加は、例えば弁の開口断面積Aを拡大させること、コンベアスクリューの回転数ωを増加させること、および/またはタッピング周波数Fを増加させることによって達成することができる。
【0089】
充填サイクルの終了時に受け入れ容器100内に存在すると推定される質量
【0090】
【数31】
【0091】
を求めるために、時間tに受け入れ容器100内に存在する質量を知ることが必要である。この目的のために、秤500によって測定される質量m(t)を使用することができる。しかしながら、特に少量の質量の充填では、重量測定信号内の遅延は許容できない不正確さに繋がる。この理由で、秤500によって測定される、特に充填サイクルの開始時の、質量m(t)を当てにすることはできない。代わりに、推定される質量
【0092】
【数32】
【0093】
が使用される。この質量の推定は、弁開口の時間プロフィールの既に完了した部分の積分値
【0094】
【数33】
【0095】
に基づくことができ、ここでこの積分値は修正係数faで重み付けされる:
【0096】
【数34】
【0097】
この係数faは、重量等価値(weight equivalent)とも呼ばれ、推定しなければならないか、または先行する充填サイクルからのデータを使用して求められるかのいずれかである。faを以下のように求めることができる:
【0098】
【数35】
【0099】
間接的に重量等価値に入る特性の中には、粉体の密度、粒サイズおよび弁310の幾何学的形状が存在する。理想的には、この重量等価値は、各投与量サイクルの後で新たに求められ、メモリーに記憶されかつ次の投与量サイクルのために使用される。これが各投与量サイクルでのfaの精度を増加させる。
【0100】
受け入れ容器内に存在する質量のこの推定値は、主として重量測定信号の遅れる出力の故に、投与量サイクルの特に開始時に中心的に重要な点となる。投与量サイクルがさらに進行すればするほど、秤で測定される質量m(t)の精度はより高くなるであろう。したがって、充填工程の進んだ段階で、秤500によって測定される質量m(t)は、質量
【0101】
【数36】
【0102】
の判定にも入る。質量
【0103】
【数37】
【0104】
を求めるための可能性は、例えば等式
【0105】
【数38】
【0106】
で提供され、上式でfbはゼロより大きく1より小さいかまたは1に等しい重みづけ係数である。この等式から、fb=0に対して質量
【0107】
【数39】
【0108】
を求めるために重みづけ信号のみが使用され、fb=1に対して開口面積の時間積分値および重量等価値に基づく推定値のみが質量
【0109】
【数40】
【0110】
を求めるために使用されることは明らかである。0<fb<1の場合は、質量
【0111】
【数41】
【0112】
は、重みづけ信号および推定値から求められる。fbを求めるための可能性は、以下の判断基準に基づく:
【0113】
【数42】
【0114】
の場合は、fbは
【0115】
【数43】
【0116】
として求められ、
そうではなく、
【0117】
【数44】
【0118】
の場合は、fbは
【0119】
【数45】
【0120】
として求められる。
さもなければ、
【0121】
【数46】
【0122】
の場合は、fb=1/2として求められる。
これは、充填サイクルが進むほど、より多く秤500の重量測定信号が考慮されることを意味する。
【0123】
推定される質量
【0124】
【数47】
【0125】
に基づいて、充填サイクルの終了時に受け入れ容器内に存在するであろう質量の推定値
【0126】
【数48】
【0127】
を作ることが可能である。この推定値は、例えば弁の開口面積の時間積分値に基づくことができる。次に、この推定値
【0128】
【数49】
【0129】
は、
【0130】
【数50】
【0131】
から求めることができる。
この推定値は、弁ができるだけ最も速い速度で閉じられているという理想的な仮定を当てにしている。充填サイクルの終了時間t2は、既に経過した時間tおよび弁310を閉じるのに必要な時間Δtから定めることができる:
t2=t+Δt
この推定値では、弁310は充填サイクルの開始時に、充填サイクルの終了時に閉じることができるのと正確に同じ速度で開けることができるという仮定を通常当てにしている。
【0132】
計算された推定値
【0133】
【数51】
【0134】
が万一所望の目標質量mzより小さい場合は、修正モジュール620は、弁をより長く開いて維持することによって、かつ/または弁を通過する質量流量
【0135】
【数52】
【0136】
を増加させることによって、この差を補償することができるであろう。
充填サイクルのさらに進んだ過程で、この修正は繰り返し行うことができる。このようにすると、分配される質量は所望の目標質量に収束する。所望の目標質量mzに向かうこの収束は、本発明による方法の重要な利点を示す。それは特に、例えば充填レベルhの変化、弁の幾何学的特性または流れの遅延開始によって生じる可能性のあるものなどの正確性に影響する要因を補償する可能性を提供する。時間と共に起きる流れ特性の変化も同様にこの方法で補償することができる。例えば、最初の充填サイクルでは充填レベルhは引き続く充填サイクルにおけるより高く、これはより高い静圧、したがって、最初の充填サイクルでのより高い排出速度に結果としてなる。
【0137】
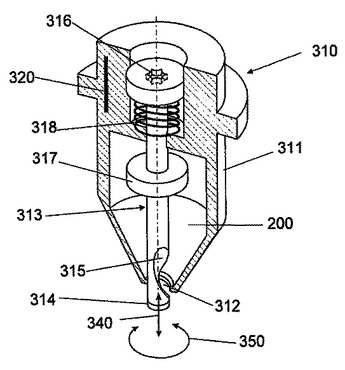
図2は、ハウジング311および円形の断面を有する出口開口部312を有する弁310を示す。閉鎖要素313が弁310内に配置される。この閉鎖要素313は、円筒状の閉鎖部分314および供給部分315を有する。この出口開口部312および閉鎖要素313は共通の軸上に配置され、閉鎖要素313はこの共通の軸周りの回転移動350ならびに共通の軸に沿った並進移動340が可能である。これによって、閉鎖要素313が出口開口部312内に入るまたは出口開口部から出る移動が可能になる。閉鎖要素313の回転移動350および並進移動340は、連結器要素316を介して閉鎖要素313に連結される駆動機構によって生じる。弁ハウジング311と閉鎖要素313の間に、閉鎖要素313をその復帰位置にリセットするのを可能にするリセット要素318が配置される。このリセット要素318は、閉鎖ばねであることが好ましい。閉鎖ばねのリセット動作は、停止部317によって境界が定められる。
【0138】
閉鎖要素313と弁ハウジング311の間に、分配される予定の物質用の貯蔵器200として働く中空の空間が形成される。閉鎖要素313が並進変位340に移動させられるとき、分配される予定の物質は、貯蔵器200から閉鎖要素313の供給部分315を介し出口開口部312を通過し、弁310から出て受け入れ容器100内に入ることができる。
【0139】
弁310には、データを記憶するように働く記憶モジュール320が装備される。この記憶モジュール320によって、例えば分配される予定の物質の材料特性および/または先行する充填サイクルからの流れパラメータの記憶が可能になる。この記憶モジュール320は、弁ハウジング311上に配置され、または弁ハウジング311内に入れられる。
【0140】
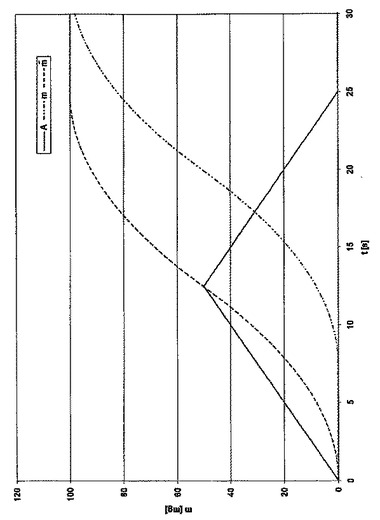
理想化される充填サイクルプロフィールに対して、図3は、開口断面積A、秤によって測定される質量m、および推定質量
【0141】
【数53】
【0142】
のそれぞれ時間プロフィールのグラフを示す。この理想的な場合では、開口断面積Aは、受け入れ容器100内に所望の目標質量mzの正確に半分が存在する点まで増加させられる。次いでこの開口断面積Aは、目標容器100内に所望の目標質量mzの次の半分を供給しながら、連続的に減少する。この充填サイクルは、開段階と閉段階の開口断面積Aに対するそれぞれの時間プロフィールグラフは、方向の逆転を除いて同一であるという仮定に基づいている。したがって弁310が閉じる点で、受け入れ容器100は、正確に所望の目標質量mzを保持する。重量測定信号の遅れに起因して、秤はまだ目標質量mzを示していない。したがって、推定値
【0143】
【数54】
【0144】
が、目標容器100内に実際に存在する質量に対して作られなければならない。
現実の充填サイクルで実際に起き、かつ例えば粒サイズの影響によって、または貯蔵器内の充填レベルによって引き起こされる不正確性は、この理想化された充填サイクルでは考慮されていない。
【0145】
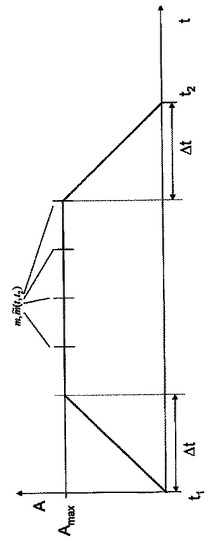
図4は、弁がその最大開口断面積Amaxまで開いた、充填サイクルの別の理想化される時間プロフィールを有するグラフを示す。時間t1から、弁310は連続的に開き、すなわち開口断面積Aは連続的に増加する。時間t1+Δtで、最大開口断面積Amaxに到達する。引き続き、受け入れ容器100内に存在する質量の推定量
【0146】
【数55】
【0147】
が、異なる時間で等式(1)に従って求められる。
【0148】
【数56】
【0149】
に基づいて、充填サイクルの終了時に受け入れ容器内に存在すると予想される質量に対する推定
【0150】
【数57】
【0151】
が、等式(2)の助けにより作られる。
【0152】
【数58】
【0153】
が目標質量mzに対し許容区間内であることが見出される場合は、すなわち
【0154】
【数59】
【0155】
である場合は、弁310は閉鎖される。弁310の閉鎖は、t2−Δtからt2までの時間間隔内で開口断面積Aの直線的な減少を介して起きる。
図示の充填サイクルでは、開口断面積Aは直線的な時間プロフィールに従って増加しかつ減少する。しかしながら、開口断面積Aを異なる方法で増加させまたは減少させることも考えられる。特に、この増加および/または減少は、段階的方式で実施することができる。
【0156】
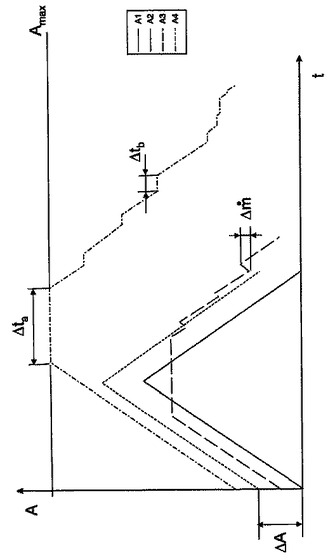
図5は、本発明による異なる理想化される充填サイクルに対する開口断面積Aの時間プロフィールグラフを示す。
グラフA1は、他の充填サイクルとの比較のために、既に図3に示されたような充填サイクルでの開口断面積Aの理想化される時間プロフィールを示す。
【0157】
同様にグラフA2は、分配される予定の物質が充填サイクルの開始時に遅延流れを示す相違点を伴う、既に図3に示されたような充填サイクルでの開口断面積Aの理想化される時間プロフィールを示す。したがってこの弁310は、物質が流れ始めることができる前に、開口の断面積の量ΔAだけ最初に開かれなければならない。この遅延流れは、例えば微粉砕物質の粒サイズによって、または他のレオロジー特性によって生じる。図2の弁310が使用される場合は、開口断面積Aと閉鎖要素313の並進変位340の間に直接的な相関関係がある。
【0158】
グラフA3およびA4は、同様に遅延流れを示す。
グラフA3は、本発明による充填サイクルに対する開口の断面積Aの時間プロフィールを示す。この充填サイクルでは、開口断面積Aは、所望の目標質量mzの一部分が受け入れ容器100内に存在するまで弁310を開口させることによって増加した。理想的にはこの部分は、目標質量mzの3分の1より多く、目標質量mzの2分の1より小さくなければならない。目標質量mzの2分の1が弁310の開口時に既に受け入れ容器100内に存在する場合は、かつ弁310は、それが開くより速く閉じることができないという仮定で、これは目標質量mzのオーバーシュートが最早修正することができないことを意味する。投与量分配工程をできるだけ迅速に実施するために、弁310の開段階を可能な最高速度で実行することが推奨される。しかしながら閉鎖は、所望の目標質量mzに向かってより正確な収束を容易にするので、よりゆっくりと実施すべきである。弁310の閉鎖では、修正モジュール620が繰り返し適用され、この場合は開口断面積Aを増加させ、かつこれによって質量流速
【0159】
【数60】
【0160】
を量
【0161】
【数61】
【0162】
だけ増加させることによって、修正が達成される。弁310が閉鎖されるときに、受け入れ容器100は所望の目標質量mzを正確に保持するであろう。受け入れ容器100内に存在する質量mは、等式(1)および/または推定値を使用して秤500の重量測定信号から求めることができる。
【0163】
グラフA4は、本発明による別の充填サイクルに対する開口断面積Aの時間プロフィールを示す。グラフA4では、充填すべき投与量はグラフA1、A2またはA3でのものより多い。したがって、弁310は、最大開口断面積Amaxまで開かせる必要がある。この最大断面積Amaxの開口は、所望の目標質量mzの一部分が受け入れ容器100内に存在するまで維持される。理想的には、グラフA2でのように、この部分は目標質量mzの3分の1より大きく、かつ目標質量mzの2分の1より小さくなければならない。グラフ4でこれは、最大開口断面積Amaxを時間間隔Δtaにわたって維持することによって達成される。引き続き、弁310は開口断面積Aを減少させることによって再び閉じられる。弁の閉鎖では、修正モジュール620が適用される。この場合この修正は、弁310を差時間間隔Δtbだけより長く開いて維持することによって達成される。この修正は、弁310が完全に閉じるとき、受け入れ容器100が正確に所望の目標質量mzを保持するような方法で実施される。
【0164】
図3,4および5に示す充填サイクルに対する質量流量は、開口断面積Aを変更することによって専ら達成される。しかしながら、質量流量
【0165】
【数62】
【0166】
が影響され得る他の方法も存在する。例えば弁310をタッピングすることによって質量流量
【0167】
【数63】
【0168】
を制御することが可能である。この場合このタッピング周波数Fは、質量流量
【0169】
【数64】
【0170】
と相互関連する。その上、閉鎖要素313を有する図2による弁310が使用されている場合は、この質量流量
【0171】
【数65】
【0172】
は、閉鎖要素313の回転数ωを変更することによっても制御することができる。
図6に示すグラフは、充填サイクル中の開口断面積Aの変化、タッピング周波数の唐突な急増、および回転数ωの唐突な急増の効果をそれぞれ図示する。理想化される状況でのこれらのパラメータの重ね合わせは、質量流量
【0173】
【数66】
【0174】
の図示の時間プロフィールに繋がる。このグラフは、開口断面積Aならびにタッピング周波数Fおよび回転数ωの全てが質量流量
【0175】
【数67】
【0176】
の時間プロフィールに影響を有することを明らかにする。
本発明を実施形態の特定の例の表示を介して説明してきたが、例えば個々の例の特徴を互いに組み合わせることによって、かつ/または例示的な実施形態の個々の機能的ユニットを入れ換えることによって、多数の別の代替実施形態を本発明の知識から作り出すことができることは明らかであると考えられる。例えば、グラフA3に示す質量流量の増加を介した修正は、弁をより長く開いて保持する概念と組み合わせることができる。質量流量の可変設定を可能にする任意の他の種類の弁を使用することもさらに考え得る。
【符号の説明】
【0177】
100 受け入れ容器、目標容器
200 貯蔵器
300 投与量分配装置
310 弁
311 弁ハウジング
312 弁の出口開口部
313 閉鎖要素
314 円筒状の閉鎖部分
315 閉鎖要素の供給部分
316 連結器要素
317 停止部
318 リセット要素
320 記憶モジュール
340 閉鎖要素の並進移動
350 閉鎖要素の回転移動
400 タイミング装置
500 秤
600 制御器ユニット
610 予測モジュール
620 修正モジュール
A 開口断面積
Amax 最大開口断面積
d 粒サイズ
fa 等価重量
fb 重量係数
F タッピング周波数
h 貯蔵器内の物質の充填レベル
H 貯蔵器内の物質の落下高さ
L 閉鎖要素の並進変位の長さ
m 質量
【0178】
【数68】
【0179】
質量流量
【0180】
【数69】
【0181】
時間tのときの推定質量
【0182】
【数70】
【0183】
質量の予想推定値
mz 目標質量
t 充填サイクル中の時間の任意の点
t1 充填サイクルの開始時間
t2 充填サイクルの終了時間
Δta 時間間隙
Δtb 別の時間間隙
ε 許容差
ω 回転数
【技術分野】
【0001】
本発明は、本明細書では目標容器とも呼ばれる受け入れ容器を、貯蔵器からの自由流れ物質の所定の目標量で充填する方法および装置に関する。
【背景技術】
【0002】
この種の充填装置は、例えば薬剤分野で必要とされる少量の投与量を分配するのに特に使用される。この受け入れ容器はしばしば、この物質を所与の仕様に従って引き続きさらに処理できるように、投与量分配装置から送られる物質の質量を量るために秤の上に配置される。
【0003】
物質のうちのある測定される用量が分配される予定のこの物質は、例えば投与量分配ヘッドを装備する原料容器または貯蔵器内に保持される。次に目標は、充填工程の終了時にこの物質の所定の目標質量が受け入れ容器内に存在するような方法で、投与量分配装置の開口部を介して投与量物質を供給することである。重要な点は、受け入れ容器内に実際に存在する質量ができるだけ正確に所定の目標質量に合致すべきであり、かつ目標質量が正確に画定されることである。この充填工程ができるだけ最短時間内に行われることもさらに重要である。
【0004】
知られた最新技術は、分配される物質の体積測定に基づく投与量分配方法を提供する。密度ρの物質、弁の可変開口断面積Aおよび結果として得られる物質の供給流速uに対し、受け入れ容器内の物質の質量mzは、
【0005】
【数1】
【0006】
として得られる。特にこの供給流速uは、例えば弁の開口面積A、貯蔵器内の物質の充填レベル高さhから結果として生じる静圧、例えば粉体粒サイズdなどの物質のレオロジー特性などの多くの影響要因に支配される。特にこのレオロジー特性はしばしば非常に複雑であり、限定される精度でしか知られていない影響要因に支配される。例えば、流れ工程の開始時にビンガム(Bingham)物質で起きる遅延流れは、考慮に入れるのが困難である。特に、微粉砕物質の投与量充填では、各々の粒の粒サイズ、湿分含有量および表面特性などの要因が主要な重要事項である。
【0007】
投与量充填工程中に貯蔵器から受け入れ容器内へ供給される目標質量の精度を最適化する方法は、米国特許第6,380,495号に開示されている。この参考文献による方法では、貯蔵器と受け入れ容器の間に配置される弁が、最初にその最大開口にある時間開いて保持され、次いで唐突に閉じられる。充填工程中、この受け入れ容器内の物質は秤によって監視される。この場合、弁を閉じるのにある長さの時間が必要であり、かつ充填工程中弁と受け入れ容器の間を自由落下している材料も存在するので不正確さが起きる。結果として、弁の唐突な閉鎖の時に秤によって指示される質量の量は、充填工程の終了後に受け入れ容器内に存在する質量の最終量より少ない。この誤差は、最小二乗法の再帰的方法を介して求められ、充填サイクルの引き続く繰り返しで修正される。ここでそれ自体存在する問題点は、弁の唐突な閉鎖である。この唐突な閉鎖中、分配されている物質は追加の力に曝される。特に、例えば精製化学製品または薬剤物質などの感受性の高い物質が分配されているとき、これらの物質をできるだけ優しく取り扱いかつできるだけ少ない応力に曝すことが重要である。そうではない場合、物質特性に所望されない変化が生じる、すなわち物質が損なわれる可能性がある。この唐突な閉鎖は、材料の締め固めに繋がる可能性もある。この締め固めは、材料特性、その結果材料の流れ特性を変化させる可能性があり、それが充填工程の再現性に悪影響を与えるであろう。さらなる問題点は、最初の充填サイクル中、先行する充填サイクルから入手可能なデータが全く存在しないことにある。したがって、最初の充填サイクルに対して修正を行うことは不可能であり、それが結果として得られる充填量に誤差を生じさせる可能性がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】米国特許第6,380,495号
【発明の概要】
【発明が解決しようとする課題】
【0009】
したがって、本発明の目的は、供給される予定の物質に可能な限り少ない量の応力しか与えず、かつ最良の精度を提供するように、貯蔵器からの自由流れ物質の所定の目標量で受け入れ容器を充填する方法および装置を提供することである。
【課題を解決するための手段】
【0010】
この目的は独立特許請求項に示めされる特徴を有する方法および装置によって達成される。さらに有利な実施形態は、従属請求項に見ることができる。
本発明による方法および本発明による装置は、物質の測定される用量を受け入れ容器内に充填するように働く投与量分配装置を使用して、受け入れ容器を貯蔵器からの自由流れ物質の所定の目標質量mzで充填する機能を実施する。この投与量分配装置は、貯蔵器から受け入れ容器内への質量流量
【0011】
【数2】
【0012】
の可変設定を可能にする弁を装備する。この投与量分配装置はさらに、充填サイクルの開始から経過した時間tを求めるためのタイミング機能、受け入れ容器内に存在する物質の質量mを求めるための秤、および弁を制御するための弁制御モジュールを有する制御器ユニットを備える。この制御器ユニットは、推定モジュールおよび修正モジュールをさらに含み、
−充填サイクル中の少なくとも1つの時間tに、推定モジュールは、時間t2のときの充填サイクルの終了時に受け入れ容器内に存在することが期待される質量
【0013】
【数3】
【0014】
の、時間tから弁があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、充填サイクルが時間t2で完了するという仮定に基づく推定を実施し、
−修正モジュールは、時間tで推定された質量
【0015】
【数4】
【0016】
を目標質量mzと比較し、推定質量
【0017】
【数5】
【0018】
が目標質量mzより小さい場合、時間tのとき存在する質量流量
【0019】
【数6】
【0020】
を伴う開口が、差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの質量流量
【0021】
【数7】
【0022】
が増加するように弁を制御する。
この構成では、異なる影響要因が修正モジュールによって補償されるので有利である。可能性のある影響要因には、例えば流れ工程の開始での遅延、物質の特定のレオロジー特性、貯蔵器内の材料の充填レベル、弁の幾何学的特性、または粒サイズなどの材料特性がある。
【0023】
本発明はさらに、分配工程を自動化する可能性を提供するので、有毒な物質の用量を分配するのに有利であることが分かる。これはこの工程の従事者が有毒物質と万一接触するリスクを低減する。
【0024】
この文脈での用語「閉鎖プロフィール(closing−down profile)」は、充填サイクル中の任意の選ばれた時間tから時間t2での充填サイクルの終了までの質量流量
【0025】
【数8】
【0026】
の減少を呼ぶ。充填サイクルの終了のときの時間t2で、質量mのさらなる量が全く弁から流れ出ないようにはるかに十分に弁は閉じられているが、この弁は唐突な方式で閉じられてはいない。閉鎖工程中のこの質量流量
【0027】
【数9】
【0028】
のプロフィールは、任意の形状のものであることができる。しかしながら簡単のために、ほとんどの場合で質量流量
【0029】
【数10】
【0030】
は、弁の閉鎖中直線的に減少することが仮定される。
特別な好みで、この質量流量
【0031】
【数11】
【0032】
の可変設定は、弁の可変開口断面積Aを使用して実現することができる。
特に、この質量流量
【0033】
【数12】
【0034】
の可変設定は、可変回転数を有するコンベアスクリューを使用して実現することができる。
理想的な方法では、この質量流量
【0035】
【数13】
【0036】
の可変設定は、可変回転数を有する回転スターラー機構を使用して実現することができる。
本明細書の文脈では、弁を開く工程は、質量流量
【0037】
【数14】
【0038】
の連続的な増加の意味を伴うと理解されたい。質量流量
【0039】
【数15】
【0040】
のこの増加は、例えば弁の開口断面積Aを拡大させること、コンベアスクリューの回転数の増加させること、および/または回転スターラー機構の回転数を増加させることによって達成することができる。
【0041】
推定モジュールは、先行する充填サイクルからのデータを使用することが好ましい。関連するデータは、例えば充填サイクルを完了させるのに必要とされる時間t2に関する情報、開口断面積の時間積分値
【0042】
【数16】
【0043】
または投与量分配工程の終了時に受け入れ容器内に存在する実際の重量m(t2)を含むことができる。特に重要な要因は、重量等価と呼ばれかつ開口断面積の時間積分値と投与量分配工程の終了時に受け入れ容器内に存在する実際の重量m(t2)から構成される数式
【0044】
【数17】
【0045】
である。何故ならばこの式は、充填サイクルの開始時の遅延流れおよび貯蔵器内に収容される物質の減少する充填レベルhに伴う静圧の減少などの流れ特性を暗黙のうちに示すからである。したがって、例えば弁の幾何学的形状、物質の密度ρおよび物質の流れの遅延は、重量等価faに重要な影響を有する。例えば微粉砕物質の場合、粒サイズ、粒サイズ分布、粒の形状および粒の表面特性がこの重量等価faに入る。弁が開いたときの個々の粒の位置も、重量等価faに対する影響を有する。これらの理由から、重量等価faは、重量m(t2)を推定するのに使用されるのが好ましい。先行する充填サイクルから得られたこれらの流れパラメータの値は、記憶モジュール、特にRFID認識票(無線周波数ベース認識素子)内に記憶し、引き続く充填サイクルで使用することができる。RFID認識票を貯蔵器に取り付けることは、これが貯蔵記憶器内の物質がRFID認識票内に記憶されるデータに確実に直接結合されるので特に有利である。
【0046】
最初の充填サイクルでは、先行する充填サイクルからのデータは未だ全く利用できない。したがって、所望の目標質量mzを超過するのを避けるために、最初の充填サイクルをゆっくりと実施する必要がある。最初の充填サイクル後は、引き続く充填サイクル用の推定が基づくべき利用できるデータが存在する。
【0047】
充填サイクルで弁が正確に一度開かれかつ正確に一度閉じられる場合は、特に有利である。特に、感受性の高い物質の分配では、このようにすると分配物質、例えば薬剤分野または精製化学製品の製造で使用される種類の物質が可能な限り少ない量の応力にしか曝されないので、この点が支配的に重要になる。弁が数回開閉される場合は、分配される予定の物質、特に粉体の粒は、物理的特性の所望されない変化に繋がり、その結果物質に損傷を引き起こす可能性のある剪断力に曝されるであろう。
【0048】
同様に、弁の滑らかな、連続的な開口および閉口動作が、物質の優しい取り扱いに寄与する。この文脈での連続的な開口動作は、弁の開口断面の連続的な広がりを意味すると理解されたい、すなわち、
t≦t*の任意の値に対してA(t)≦A(t*)。
【0049】
同じように、弁の閉鎖では、弁の開口断面は連続的により小さくされる、すなわち、
t≦t*の任意の値に対してA(t)≧A(t*)。
開口および閉口工程を簡単化するために、弁は段階的動作で開きかつ閉じる。
【0050】
充填工程中、秤が目標質量mzの3分の1に少なくとも等しい、目標容器内の物質に対する質量mの量を測定するときの時点で、推定モジュールを最初に使用するのが有利である。このようにすると、弁は修正なしで比較的速い速度でプリセットされた方法で開くことができ、目標質量mzの最初の部分を比較的迅速に充填することができる。充填工程の終了時に受け入れ容器内に存在する物質の量ができるだけ正確に目標質量mzに合致するのを確実にするために、充填工程の終了に向かって物質を受け入れ容器内にゆっくりしたかつ制御される方式で充填するのがより有利になる。この理由で、修正モジュールを使用する修正が目標質量mzの最後の3分の2を充填する段階でのみ実施される場合、かつ/または修正モジュールが弁の閉鎖の段階でのみ使用される場合も有利である。
【0051】
修正モジュールを繰り返し使用することは、これによって推定質量と受け入れ容器内に実際に存在する質量との間の差を繰り返し調整するのが可能になるので、好ましい効果を有する。特に質量流量が既に比較的低いとき、充填工程の終了に向かって、この修正モジュールを繰り返し適用すべきである。これによって、目標質量mzに非常に正確に接近し、受け入れ容器内に供給される過剰量の質量が全くないことを確実にすることができる。それによって目標質量mzをオーバーシュートするリスクは避けられる。
【0052】
本発明による方法は、特に微粉砕のまたは液体物質用量の充填に用途を見出している。液体物質は普通は複雑なレオロジー特性を有し、多くの場合非ニュートン性質のものである。問題の目標質量は、通常0.5mgから5000mgの間の範囲内にある。しかしながら、この方法でより少ないまたはより多くの用量を分配することも可能である。
【0053】
有利な実施形態では、この弁は円形の開口断面を有する出口開口部と閉鎖要素を有し、この出口開口部および閉鎖要素は共通軸上に配置され、この閉鎖要素はこの共通の軸周りをハウジングに対して回転可能であり、かつ共通の軸に沿って出口開口部内に入りかつ出る並進移動が可能であり、かつこの閉鎖要素は、閉鎖要素の並進移動を介して弁が開閉できるように、円筒状の閉鎖部分および供給部分を有する。
【0054】
前述の配置で、閉鎖要素の段階的並進移動を介して弁を開閉することが有利である。
この閉鎖要素の供給部分が可変開口断面積Aを有する場合は有利である。このようにすると、弁を通り移動する質量流量
【0055】
【数18】
【0056】
の大きさは、弁の閉鎖要素の位置と直接的に関連する。理想的には、閉鎖要素の長さ方向での並進移動位置Lは弁の開口断面積と直接的に関連する、すなわち、A=A(L)である。弁の形態に応じて、閉鎖要素の並進移動位置L、開口断面積Aと質量流量
【0057】
【数19】
【0058】
の間に直接的な比例関係が存在する可能性がある:
【0059】
【数20】
【0060】
しかしながら、この種の直接的な比例は、例えば粒サイズなどの材料特性、流れ工程の開始での遅延または同様な要因も直接的な比例に対して逆に作用するので、実際の状況では通常達成することはできない。それでも、より大きな開口断面積はより大きな質量流れを伴うことは、一般的に見なすことができる。
【0061】
理想的には、弁を開閉するために、この閉鎖要素は同じ大きさの並進ステップΔLで移動する。したがって、この開閉段階は、開口断面積Aの同じ時間プロフィールに沿って進み、それによって弁の開段階で起きる誤差は、弁の閉段階で起きる誤差によって補償される。例えば、粉体粒サイズおよび/または弁の幾何学的形状に起因して、閉鎖要素の並進移動位置L1を通過するまで物質が流れ始めない場合は、閉段階で並進移動位置L1を再度通過した後、弁から外に供給される材料は最早ないであろうことを仮定することができる。
【0062】
可変回転数ωで回転させることができる閉鎖要素を使用することは有利であり、この回転数ωは、弁を通過する質量流量
【0063】
【数21】
【0064】
と直接的に相互関連する。
この弁がタッピング機構を装備する場合はさらに有利であり、タップは可変タッピング周波数Fで既に開いている弁に向けられる。そのような構成では、タッピング周波数Fは弁を通過する質量流量
【0065】
【数22】
【0066】
と直接的に相互関連し、タッピング周波数の増加は質量流量
【0067】
【数23】
【0068】
の増加に繋がる。このタッピングは、閉鎖要素の軸の方向ならびに軸に直角な方向であることができる。
さらに、このタップは弁の閉鎖要素に、かつ/または弁のハウジングに向けることができる。
【0069】
この回転移動ならびにタッピングは、弁の詰まりおよび/または粉体ブリッジの形成がそれによって妨げられる有益な効果を有する。このようにすると、粉体の能力を低くまで自由に保存しまたは高めることが可能になる。
【0070】
制御器ユニットは、部分的に、またはその全体をコンピュータベースのシステムとして実現することができる。
受け入れ容器を充填するための本方法および装置は、添付の図面に概略的に図示する例によって、本明細書でこの後で説明する。
【図面の簡単な説明】
【0071】
【図1】本発明による、受け入れ容器の充填のための装置の概略図である。
【図2】弁ハウジングおよび閉鎖要素を有する弁の図である。
【図3】充填サイクルの理想化された時間プロフィールを示すグラフである。
【図4】弁がその最大開口断面積Amaxまで開いた、充填サイクルの別の理想化された時間プロフィールを示すグラフである。
【図5】本発明による、異なる理想化された充填サイクルに対する開口断面積の時間プロフィールを示すグラフである。
【図6】開口断面積A、タッピング周波数Fおよび回転数ωが質量流量
【0072】
【数24】
【0073】
に対して有する影響を、それぞれ、示すグラフである。
【発明を実施するための形態】
【0074】
図1は、投与量分配装置300によって、貯蔵器200内に充填レベルhまで保持される物質で充填することができる、受け入れ容器100を示す。この投与量分配装置300は、充填サイクルの開始からの経過時間を求めることができ、かつ測定された時間を示す信号を制御器ユニット600に伝送できる、タイミング装置400に結合されている。この受け入れ容器は、受け入れ容器100内に存在する物質の重量を求めることができるように、秤500の上に配置される。測定される重量または質量を示す信号は同様に、制御器ユニット600に伝送することができる。制御器ユニット600では、その結果が投与量分配サイクルの開始からのある経過時間tのときに存在する質量m(t)を示すように、この時間信号および質量信号が互いに結合される。
【0075】
理想的には、弁310は受け入れ容器100が所望の目標質量mzの半分を保持するまで、ますます開き続けるであろう。やはり理想的な場合では、この弁310は引き続き、所望の目標質量の次の半分が受け入れ容器100内に供給されている間に、再び閉鎖されるであろう。この工程で、弁310は、できるだけ最短時間を充填サイクルのために取るために、できるだけ早くかつ広く開きかつ閉じられるべきである。これに伴う問題点は、時間tに受け入れ容器100内に存在する質量m(t)が知られていないことであり、何故ならば、秤500によって生じる重量測定信号がいくつかの要因に起因して遅れるからである。例えば、弁310と受け入れ容器100の間の高さ間隔H内を自由落下している質量、より具体的には受け入れ容器100内の物質の表面レベルは、秤500によって登録されない。さらにこの秤は、安定した重量測定結果を生じるのにある量の時間を必要とする。これらの不正確性によって、時間tでの受け入れ容器100内に存在する質量m(t)を制御器ユニット600内に含まれる推定モジュール610を使用して推定すること、かつ推定モジュール610から得られたこのデータに基づいて、同様に制御器ユニット600内に含まれる修正モジュール620を使用して弁の制御に修正を加えることが必要となる。
【0076】
推定モジュール610から、充填サイクルの終了時の時間t2に受け入れ容器100内に存在すると予想される質量
【0077】
【数25】
【0078】
の推定値が充填サイクル中の少なくとも1つの時間tで得られ、この推定値は、時間tから進んで弁310が仮定した閉鎖プロフィールに従って閉じられているという仮定に基づいている。修正モジュール620は、時間tに対して推定した質量
【0079】
【数26】
【0080】
を目標質量mzに対して比較し、充填サイクルの終了時に対する現行の質量推定値
【0081】
【数27】
【0082】
が目標質量mzより小さい場合は、弁(310)は、時間tで存在する質量流量
【0083】
【数28】
【0084】
を伴う開口が差異時間区間Δtだけより長く維持されるであろうように、あるいは/または時間tでの質量流量
【0085】
【数29】
【0086】
が増加するであろうように制御される。質量流量
【0087】
【数30】
【0088】
のこの増加は、例えば弁の開口断面積Aを拡大させること、コンベアスクリューの回転数ωを増加させること、および/またはタッピング周波数Fを増加させることによって達成することができる。
【0089】
充填サイクルの終了時に受け入れ容器100内に存在すると推定される質量
【0090】
【数31】
【0091】
を求めるために、時間tに受け入れ容器100内に存在する質量を知ることが必要である。この目的のために、秤500によって測定される質量m(t)を使用することができる。しかしながら、特に少量の質量の充填では、重量測定信号内の遅延は許容できない不正確さに繋がる。この理由で、秤500によって測定される、特に充填サイクルの開始時の、質量m(t)を当てにすることはできない。代わりに、推定される質量
【0092】
【数32】
【0093】
が使用される。この質量の推定は、弁開口の時間プロフィールの既に完了した部分の積分値
【0094】
【数33】
【0095】
に基づくことができ、ここでこの積分値は修正係数faで重み付けされる:
【0096】
【数34】
【0097】
この係数faは、重量等価値(weight equivalent)とも呼ばれ、推定しなければならないか、または先行する充填サイクルからのデータを使用して求められるかのいずれかである。faを以下のように求めることができる:
【0098】
【数35】
【0099】
間接的に重量等価値に入る特性の中には、粉体の密度、粒サイズおよび弁310の幾何学的形状が存在する。理想的には、この重量等価値は、各投与量サイクルの後で新たに求められ、メモリーに記憶されかつ次の投与量サイクルのために使用される。これが各投与量サイクルでのfaの精度を増加させる。
【0100】
受け入れ容器内に存在する質量のこの推定値は、主として重量測定信号の遅れる出力の故に、投与量サイクルの特に開始時に中心的に重要な点となる。投与量サイクルがさらに進行すればするほど、秤で測定される質量m(t)の精度はより高くなるであろう。したがって、充填工程の進んだ段階で、秤500によって測定される質量m(t)は、質量
【0101】
【数36】
【0102】
の判定にも入る。質量
【0103】
【数37】
【0104】
を求めるための可能性は、例えば等式
【0105】
【数38】
【0106】
で提供され、上式でfbはゼロより大きく1より小さいかまたは1に等しい重みづけ係数である。この等式から、fb=0に対して質量
【0107】
【数39】
【0108】
を求めるために重みづけ信号のみが使用され、fb=1に対して開口面積の時間積分値および重量等価値に基づく推定値のみが質量
【0109】
【数40】
【0110】
を求めるために使用されることは明らかである。0<fb<1の場合は、質量
【0111】
【数41】
【0112】
は、重みづけ信号および推定値から求められる。fbを求めるための可能性は、以下の判断基準に基づく:
【0113】
【数42】
【0114】
の場合は、fbは
【0115】
【数43】
【0116】
として求められ、
そうではなく、
【0117】
【数44】
【0118】
の場合は、fbは
【0119】
【数45】
【0120】
として求められる。
さもなければ、
【0121】
【数46】
【0122】
の場合は、fb=1/2として求められる。
これは、充填サイクルが進むほど、より多く秤500の重量測定信号が考慮されることを意味する。
【0123】
推定される質量
【0124】
【数47】
【0125】
に基づいて、充填サイクルの終了時に受け入れ容器内に存在するであろう質量の推定値
【0126】
【数48】
【0127】
を作ることが可能である。この推定値は、例えば弁の開口面積の時間積分値に基づくことができる。次に、この推定値
【0128】
【数49】
【0129】
は、
【0130】
【数50】
【0131】
から求めることができる。
この推定値は、弁ができるだけ最も速い速度で閉じられているという理想的な仮定を当てにしている。充填サイクルの終了時間t2は、既に経過した時間tおよび弁310を閉じるのに必要な時間Δtから定めることができる:
t2=t+Δt
この推定値では、弁310は充填サイクルの開始時に、充填サイクルの終了時に閉じることができるのと正確に同じ速度で開けることができるという仮定を通常当てにしている。
【0132】
計算された推定値
【0133】
【数51】
【0134】
が万一所望の目標質量mzより小さい場合は、修正モジュール620は、弁をより長く開いて維持することによって、かつ/または弁を通過する質量流量
【0135】
【数52】
【0136】
を増加させることによって、この差を補償することができるであろう。
充填サイクルのさらに進んだ過程で、この修正は繰り返し行うことができる。このようにすると、分配される質量は所望の目標質量に収束する。所望の目標質量mzに向かうこの収束は、本発明による方法の重要な利点を示す。それは特に、例えば充填レベルhの変化、弁の幾何学的特性または流れの遅延開始によって生じる可能性のあるものなどの正確性に影響する要因を補償する可能性を提供する。時間と共に起きる流れ特性の変化も同様にこの方法で補償することができる。例えば、最初の充填サイクルでは充填レベルhは引き続く充填サイクルにおけるより高く、これはより高い静圧、したがって、最初の充填サイクルでのより高い排出速度に結果としてなる。
【0137】
図2は、ハウジング311および円形の断面を有する出口開口部312を有する弁310を示す。閉鎖要素313が弁310内に配置される。この閉鎖要素313は、円筒状の閉鎖部分314および供給部分315を有する。この出口開口部312および閉鎖要素313は共通の軸上に配置され、閉鎖要素313はこの共通の軸周りの回転移動350ならびに共通の軸に沿った並進移動340が可能である。これによって、閉鎖要素313が出口開口部312内に入るまたは出口開口部から出る移動が可能になる。閉鎖要素313の回転移動350および並進移動340は、連結器要素316を介して閉鎖要素313に連結される駆動機構によって生じる。弁ハウジング311と閉鎖要素313の間に、閉鎖要素313をその復帰位置にリセットするのを可能にするリセット要素318が配置される。このリセット要素318は、閉鎖ばねであることが好ましい。閉鎖ばねのリセット動作は、停止部317によって境界が定められる。
【0138】
閉鎖要素313と弁ハウジング311の間に、分配される予定の物質用の貯蔵器200として働く中空の空間が形成される。閉鎖要素313が並進変位340に移動させられるとき、分配される予定の物質は、貯蔵器200から閉鎖要素313の供給部分315を介し出口開口部312を通過し、弁310から出て受け入れ容器100内に入ることができる。
【0139】
弁310には、データを記憶するように働く記憶モジュール320が装備される。この記憶モジュール320によって、例えば分配される予定の物質の材料特性および/または先行する充填サイクルからの流れパラメータの記憶が可能になる。この記憶モジュール320は、弁ハウジング311上に配置され、または弁ハウジング311内に入れられる。
【0140】
理想化される充填サイクルプロフィールに対して、図3は、開口断面積A、秤によって測定される質量m、および推定質量
【0141】
【数53】
【0142】
のそれぞれ時間プロフィールのグラフを示す。この理想的な場合では、開口断面積Aは、受け入れ容器100内に所望の目標質量mzの正確に半分が存在する点まで増加させられる。次いでこの開口断面積Aは、目標容器100内に所望の目標質量mzの次の半分を供給しながら、連続的に減少する。この充填サイクルは、開段階と閉段階の開口断面積Aに対するそれぞれの時間プロフィールグラフは、方向の逆転を除いて同一であるという仮定に基づいている。したがって弁310が閉じる点で、受け入れ容器100は、正確に所望の目標質量mzを保持する。重量測定信号の遅れに起因して、秤はまだ目標質量mzを示していない。したがって、推定値
【0143】
【数54】
【0144】
が、目標容器100内に実際に存在する質量に対して作られなければならない。
現実の充填サイクルで実際に起き、かつ例えば粒サイズの影響によって、または貯蔵器内の充填レベルによって引き起こされる不正確性は、この理想化された充填サイクルでは考慮されていない。
【0145】
図4は、弁がその最大開口断面積Amaxまで開いた、充填サイクルの別の理想化される時間プロフィールを有するグラフを示す。時間t1から、弁310は連続的に開き、すなわち開口断面積Aは連続的に増加する。時間t1+Δtで、最大開口断面積Amaxに到達する。引き続き、受け入れ容器100内に存在する質量の推定量
【0146】
【数55】
【0147】
が、異なる時間で等式(1)に従って求められる。
【0148】
【数56】
【0149】
に基づいて、充填サイクルの終了時に受け入れ容器内に存在すると予想される質量に対する推定
【0150】
【数57】
【0151】
が、等式(2)の助けにより作られる。
【0152】
【数58】
【0153】
が目標質量mzに対し許容区間内であることが見出される場合は、すなわち
【0154】
【数59】
【0155】
である場合は、弁310は閉鎖される。弁310の閉鎖は、t2−Δtからt2までの時間間隔内で開口断面積Aの直線的な減少を介して起きる。
図示の充填サイクルでは、開口断面積Aは直線的な時間プロフィールに従って増加しかつ減少する。しかしながら、開口断面積Aを異なる方法で増加させまたは減少させることも考えられる。特に、この増加および/または減少は、段階的方式で実施することができる。
【0156】
図5は、本発明による異なる理想化される充填サイクルに対する開口断面積Aの時間プロフィールグラフを示す。
グラフA1は、他の充填サイクルとの比較のために、既に図3に示されたような充填サイクルでの開口断面積Aの理想化される時間プロフィールを示す。
【0157】
同様にグラフA2は、分配される予定の物質が充填サイクルの開始時に遅延流れを示す相違点を伴う、既に図3に示されたような充填サイクルでの開口断面積Aの理想化される時間プロフィールを示す。したがってこの弁310は、物質が流れ始めることができる前に、開口の断面積の量ΔAだけ最初に開かれなければならない。この遅延流れは、例えば微粉砕物質の粒サイズによって、または他のレオロジー特性によって生じる。図2の弁310が使用される場合は、開口断面積Aと閉鎖要素313の並進変位340の間に直接的な相関関係がある。
【0158】
グラフA3およびA4は、同様に遅延流れを示す。
グラフA3は、本発明による充填サイクルに対する開口の断面積Aの時間プロフィールを示す。この充填サイクルでは、開口断面積Aは、所望の目標質量mzの一部分が受け入れ容器100内に存在するまで弁310を開口させることによって増加した。理想的にはこの部分は、目標質量mzの3分の1より多く、目標質量mzの2分の1より小さくなければならない。目標質量mzの2分の1が弁310の開口時に既に受け入れ容器100内に存在する場合は、かつ弁310は、それが開くより速く閉じることができないという仮定で、これは目標質量mzのオーバーシュートが最早修正することができないことを意味する。投与量分配工程をできるだけ迅速に実施するために、弁310の開段階を可能な最高速度で実行することが推奨される。しかしながら閉鎖は、所望の目標質量mzに向かってより正確な収束を容易にするので、よりゆっくりと実施すべきである。弁310の閉鎖では、修正モジュール620が繰り返し適用され、この場合は開口断面積Aを増加させ、かつこれによって質量流速
【0159】
【数60】
【0160】
を量
【0161】
【数61】
【0162】
だけ増加させることによって、修正が達成される。弁310が閉鎖されるときに、受け入れ容器100は所望の目標質量mzを正確に保持するであろう。受け入れ容器100内に存在する質量mは、等式(1)および/または推定値を使用して秤500の重量測定信号から求めることができる。
【0163】
グラフA4は、本発明による別の充填サイクルに対する開口断面積Aの時間プロフィールを示す。グラフA4では、充填すべき投与量はグラフA1、A2またはA3でのものより多い。したがって、弁310は、最大開口断面積Amaxまで開かせる必要がある。この最大断面積Amaxの開口は、所望の目標質量mzの一部分が受け入れ容器100内に存在するまで維持される。理想的には、グラフA2でのように、この部分は目標質量mzの3分の1より大きく、かつ目標質量mzの2分の1より小さくなければならない。グラフ4でこれは、最大開口断面積Amaxを時間間隔Δtaにわたって維持することによって達成される。引き続き、弁310は開口断面積Aを減少させることによって再び閉じられる。弁の閉鎖では、修正モジュール620が適用される。この場合この修正は、弁310を差時間間隔Δtbだけより長く開いて維持することによって達成される。この修正は、弁310が完全に閉じるとき、受け入れ容器100が正確に所望の目標質量mzを保持するような方法で実施される。
【0164】
図3,4および5に示す充填サイクルに対する質量流量は、開口断面積Aを変更することによって専ら達成される。しかしながら、質量流量
【0165】
【数62】
【0166】
が影響され得る他の方法も存在する。例えば弁310をタッピングすることによって質量流量
【0167】
【数63】
【0168】
を制御することが可能である。この場合このタッピング周波数Fは、質量流量
【0169】
【数64】
【0170】
と相互関連する。その上、閉鎖要素313を有する図2による弁310が使用されている場合は、この質量流量
【0171】
【数65】
【0172】
は、閉鎖要素313の回転数ωを変更することによっても制御することができる。
図6に示すグラフは、充填サイクル中の開口断面積Aの変化、タッピング周波数の唐突な急増、および回転数ωの唐突な急増の効果をそれぞれ図示する。理想化される状況でのこれらのパラメータの重ね合わせは、質量流量
【0173】
【数66】
【0174】
の図示の時間プロフィールに繋がる。このグラフは、開口断面積Aならびにタッピング周波数Fおよび回転数ωの全てが質量流量
【0175】
【数67】
【0176】
の時間プロフィールに影響を有することを明らかにする。
本発明を実施形態の特定の例の表示を介して説明してきたが、例えば個々の例の特徴を互いに組み合わせることによって、かつ/または例示的な実施形態の個々の機能的ユニットを入れ換えることによって、多数の別の代替実施形態を本発明の知識から作り出すことができることは明らかであると考えられる。例えば、グラフA3に示す質量流量の増加を介した修正は、弁をより長く開いて保持する概念と組み合わせることができる。質量流量の可変設定を可能にする任意の他の種類の弁を使用することもさらに考え得る。
【符号の説明】
【0177】
100 受け入れ容器、目標容器
200 貯蔵器
300 投与量分配装置
310 弁
311 弁ハウジング
312 弁の出口開口部
313 閉鎖要素
314 円筒状の閉鎖部分
315 閉鎖要素の供給部分
316 連結器要素
317 停止部
318 リセット要素
320 記憶モジュール
340 閉鎖要素の並進移動
350 閉鎖要素の回転移動
400 タイミング装置
500 秤
600 制御器ユニット
610 予測モジュール
620 修正モジュール
A 開口断面積
Amax 最大開口断面積
d 粒サイズ
fa 等価重量
fb 重量係数
F タッピング周波数
h 貯蔵器内の物質の充填レベル
H 貯蔵器内の物質の落下高さ
L 閉鎖要素の並進変位の長さ
m 質量
【0178】
【数68】
【0179】
質量流量
【0180】
【数69】
【0181】
時間tのときの推定質量
【0182】
【数70】
【0183】
質量の予想推定値
mz 目標質量
t 充填サイクル中の時間の任意の点
t1 充填サイクルの開始時間
t2 充填サイクルの終了時間
Δta 時間間隙
Δtb 別の時間間隙
ε 許容差
ω 回転数
【特許請求の範囲】
【請求項1】
自由流れ物質の測定される用量を受け入れ容器(100)内に充填するように働く投与量分配装置(300)を使用して、前記受け入れ容器(100)を貯蔵器(200)からの前記物質の所定の目標質量mzで充填する方法であって、前記投与量分配装置(300)が、前記貯蔵器(200)から前記受け入れ容器(100)内への質量流量
【数1】
の可変設定を可能にする弁(310)を備え、かつ充填サイクルの開始から経過した時間tを求めるためのタイミング機能(400)、前記受け入れ容器(100)内に存在する前記物質の質量mを求めるための秤(500)、および前記弁(310)を制御するための制御器ユニット(600)とをさらに備える方法において、前記制御器ユニット(600)が推定モジュール(610)および修正モジュール(620)を含み、
前記充填サイクル中の少なくとも1つの時間tで、前記推定モジュール(610)が、時間t2のときの前記充填サイクルの終了時に前記受け入れ容器(100)内に存在することが期待される質量
【数2】
の推定を実施し、前記推定は、時間tから前記弁(310)があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、前記充填サイクルが時間t2で完了するという仮定に基づき、
前記修正モジュール(620)が、時間tで推定された前記質量
【数3】
を前記目標質量mzと比較し、前記推定質量
【数4】
が前記目標質量mzより小さいことが見出される場合、時間tのとき存在する前記質量流量
【数5】
を伴う開口が差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの前記質量流量
【数6】
が増加するように前記弁(310)を制御することを特徴とする、方法。
【請求項2】
前記質量流量
【数7】
の可変設定が、前記弁(310)の可変開口断面積Aを使用して実現されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記質量流量
【数8】
の可変設定が、可変回転数を有するコンベアスクリューおよび/またはロータリスターラ機構を使用して実現されることを特徴とする、請求項1に記載の方法。
【請求項4】
前記推定モジュール(610)が、前記質量
【数9】
を推定するために先行する充填サイクルから知られたデータを使用することを特徴とする、請求項1から3のいずれか一項に記載の方法。
【請求項5】
先行する充填サイクルから知られた前記データが、充填サイクルを完了させるのに必要とされる時間t2、開口断面積の時間積分値
【数10】
および/または投与量分配工程の終了時に前記受け入れ容器内に存在する実際の重量m(t2)を含むことを特徴とする、請求項5に記載の方法。
【請求項6】
前記弁(310)が、前記受け入れ容器(100)を充填する前記工程中、正確に1回開けられかつ正確に1回閉じられることを特徴とする、請求項1から5のいずれか一項に記載の方法。
【請求項7】
前記弁(310)が連続動作で開きかつ/または連続動作で閉じることを特徴とする、請求項1から6のいずれか一項に記載の方法。
【請求項8】
前記弁(310)が段階的動作で開きかつ/または段階的動作で閉じることを特徴とする、請求項1から7のいずれか一項に記載の方法。
【請求項9】
前記推定モジュール(610)が、前記秤(500)によって指示される質量mの量が前記目標質量mzの少なくとも3分の1を示すとき使用されることを特徴とする、請求項1から8のいずれか一項に記載の方法。
【請求項10】
前記修正モジュール(620)が、前記弁の閉鎖で使用されることを特徴とする、請求項1から9のいずれか一項に記載の方法。
【請求項11】
前記修正モジュール(620)が繰り返し使用されることを特徴とする、請求項1から10のいずれか一項に記載の方法。
【請求項12】
前記弁(310)が、ハウジング(311)、円形の開口断面を有する出口開口部(312)および閉鎖要素(313)とを備え、
前記出口開口部(312)および閉鎖要素(313)が共通の軸上に配置され、前記閉鎖要素(313)が前記共通の軸の周りを前記ハウジング(311)に対して相対的に回転し、かつ前記共通な軸に沿って並進移動で前記出口開口部(312)内に摺動して入りかつ出、
前記閉鎖要素(313)の前記並進移動(340)を介して前記弁(310)が開閉されるように前記閉鎖要素(313)が円筒状の閉鎖部分(314)および供給部分(315)を有することを特徴とする、請求項1から11のいずれか一項に記載の方法。
【請求項13】
前記弁(310)が前記閉鎖要素(313)の段階的並進動作を介して開らかれ、かつ/または閉じられることを特徴とする、請求項12に記載の方法。
【請求項14】
前記弁(310)が、等しい大きさの並進ステップΔLで前記閉鎖要素(313)を移動させることによって、開らかれかつ/または閉じられることを特徴とする、請求項13に記載の方法。
【請求項15】
前記閉鎖要素の前記供給部分(315)が可変開口断面積Aを有し、かつ前記閉鎖要素(313)の並進変位Lが、前記弁の開口断面積Aと直接的に相互関連することを特徴とする、請求項12から14のいずれか一項に記載の方法。
【請求項16】
前記閉鎖要素(313)が可変回転数ωで回転し、前記回転数ωが前記弁(310)を通り移動する質量流量
【数11】
と直接相互関連することを特徴とする、請求項12から15のいずれか一項に記載の方法。
【請求項17】
前記弁(310)がタッピング機構を装備し、可変タッピング周波数Fのタップが前記既に開いている弁に向けられ、前記タッピング周波数Fが前記弁(310)を通り移動する質量流量
【数12】
と直接相互関連することを特徴とする、請求項12から16のいずれか一項に記載の方法。
【請求項18】
自由流れ物質の測定される用量を受け入れ容器(100)内に充填するように働く投与量分配装置(300)を使用して、前記受け入れ容器(100)を貯蔵器(200)からの前記物質の所定の目標質量mzで充填するように動作可能な装置であって、前記投与量分配装置(300)が前記貯蔵器(200)から前記受け入れ容器(100)内への質量流量
【数13】
の可変設定を可能にする弁(310)を備え、かつ充填サイクルの開始から経過した時間tを求めるためのタイミング機能(400)、前記受け入れ容器(100)内に存在する物質の質量mを求めるための秤(500)、および前記弁(310)を制御するための制御器ユニット(600)とをさらに備える装置において、
前記制御器ユニット(600)が推定モジュール(610)および修正モジュール(620)を含み、
前記推定モジュール(610)が、前記充填サイクル中の少なくとも1つの時間tで、時間t2のときの前記充填サイクルの終了時に前記受け入れ容器(100)内に存在することが期待される質量
【数14】
の推定を実施するように動作可能であり、前記推定が、時間tから前記弁(310)があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、前記充填サイクルが時間t2で完了するという仮定に基づき、
前記修正モジュール(620)が、時間tで推定された前記質量
【数15】
を前記目標質量mzと比較するように動作可能であり、前記推定質量
【数16】
が前記目標質量mzより小さいことが見出される場合、時間tのとき存在する前記質量流量
【数17】
を伴う開口が差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの前記質量流量
【数18】
が増加するように、前記弁(310)を制御することができることを特徴とする、装置。
【請求項19】
前記弁(310)が、ハウジング(311)、円形の開口断面を有する出口開口部(312)および閉鎖要素(313)とを備え、
前記出口開口部(312)および前記閉鎖要素(313)が共通の軸上に配置され、前記閉鎖要素(313)が前記共通の軸の周りを前記ハウジング(311)に対して回転可能であり、前記共通の軸に沿った並進移動で前記出口開口部(312)内に入りかつ出るように摺動可能であり、
前記閉鎖要素(313)の前記並進移動を介して前記弁が開閉するように、前記閉鎖要素(313)が円筒状の閉鎖部分(314)および供給部分(315)を有することを特徴とする、請求項18に記載の装置。
【請求項20】
前記閉鎖要素の前記供給部分(315)が可変の開口断面積Aを有し、前記閉鎖要素(313)の前記並進変位が前記弁(310)の前記開口断面積Aと直接的に相互関連することを特徴とする、請求項19に記載の装置。
【請求項21】
前記閉鎖要素(313)が、可変回転数ωを伴う回転に設定することができ、前面回転数ωが前記弁(310)を通り移動する質量流量
【数19】
と直接的に相互関連することを特徴とする、請求項18から20のいずれか一項に記載の装置。
【請求項22】
前記弁(310)が、可変タッピング周波数Fを有するタップを既に開いている前記弁に向けるように動作可能であるタッピング機構を備え、前記タッピング周波数Fが前記弁(310)を通り移動する質量流量
【数20】
と直接的に相互関連することを特徴とする、請求項18から21のいずれか一項に記載の装置。
【請求項1】
自由流れ物質の測定される用量を受け入れ容器(100)内に充填するように働く投与量分配装置(300)を使用して、前記受け入れ容器(100)を貯蔵器(200)からの前記物質の所定の目標質量mzで充填する方法であって、前記投与量分配装置(300)が、前記貯蔵器(200)から前記受け入れ容器(100)内への質量流量
【数1】
の可変設定を可能にする弁(310)を備え、かつ充填サイクルの開始から経過した時間tを求めるためのタイミング機能(400)、前記受け入れ容器(100)内に存在する前記物質の質量mを求めるための秤(500)、および前記弁(310)を制御するための制御器ユニット(600)とをさらに備える方法において、前記制御器ユニット(600)が推定モジュール(610)および修正モジュール(620)を含み、
前記充填サイクル中の少なくとも1つの時間tで、前記推定モジュール(610)が、時間t2のときの前記充填サイクルの終了時に前記受け入れ容器(100)内に存在することが期待される質量
【数2】
の推定を実施し、前記推定は、時間tから前記弁(310)があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、前記充填サイクルが時間t2で完了するという仮定に基づき、
前記修正モジュール(620)が、時間tで推定された前記質量
【数3】
を前記目標質量mzと比較し、前記推定質量
【数4】
が前記目標質量mzより小さいことが見出される場合、時間tのとき存在する前記質量流量
【数5】
を伴う開口が差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの前記質量流量
【数6】
が増加するように前記弁(310)を制御することを特徴とする、方法。
【請求項2】
前記質量流量
【数7】
の可変設定が、前記弁(310)の可変開口断面積Aを使用して実現されることを特徴とする、請求項1に記載の方法。
【請求項3】
前記質量流量
【数8】
の可変設定が、可変回転数を有するコンベアスクリューおよび/またはロータリスターラ機構を使用して実現されることを特徴とする、請求項1に記載の方法。
【請求項4】
前記推定モジュール(610)が、前記質量
【数9】
を推定するために先行する充填サイクルから知られたデータを使用することを特徴とする、請求項1から3のいずれか一項に記載の方法。
【請求項5】
先行する充填サイクルから知られた前記データが、充填サイクルを完了させるのに必要とされる時間t2、開口断面積の時間積分値
【数10】
および/または投与量分配工程の終了時に前記受け入れ容器内に存在する実際の重量m(t2)を含むことを特徴とする、請求項5に記載の方法。
【請求項6】
前記弁(310)が、前記受け入れ容器(100)を充填する前記工程中、正確に1回開けられかつ正確に1回閉じられることを特徴とする、請求項1から5のいずれか一項に記載の方法。
【請求項7】
前記弁(310)が連続動作で開きかつ/または連続動作で閉じることを特徴とする、請求項1から6のいずれか一項に記載の方法。
【請求項8】
前記弁(310)が段階的動作で開きかつ/または段階的動作で閉じることを特徴とする、請求項1から7のいずれか一項に記載の方法。
【請求項9】
前記推定モジュール(610)が、前記秤(500)によって指示される質量mの量が前記目標質量mzの少なくとも3分の1を示すとき使用されることを特徴とする、請求項1から8のいずれか一項に記載の方法。
【請求項10】
前記修正モジュール(620)が、前記弁の閉鎖で使用されることを特徴とする、請求項1から9のいずれか一項に記載の方法。
【請求項11】
前記修正モジュール(620)が繰り返し使用されることを特徴とする、請求項1から10のいずれか一項に記載の方法。
【請求項12】
前記弁(310)が、ハウジング(311)、円形の開口断面を有する出口開口部(312)および閉鎖要素(313)とを備え、
前記出口開口部(312)および閉鎖要素(313)が共通の軸上に配置され、前記閉鎖要素(313)が前記共通の軸の周りを前記ハウジング(311)に対して相対的に回転し、かつ前記共通な軸に沿って並進移動で前記出口開口部(312)内に摺動して入りかつ出、
前記閉鎖要素(313)の前記並進移動(340)を介して前記弁(310)が開閉されるように前記閉鎖要素(313)が円筒状の閉鎖部分(314)および供給部分(315)を有することを特徴とする、請求項1から11のいずれか一項に記載の方法。
【請求項13】
前記弁(310)が前記閉鎖要素(313)の段階的並進動作を介して開らかれ、かつ/または閉じられることを特徴とする、請求項12に記載の方法。
【請求項14】
前記弁(310)が、等しい大きさの並進ステップΔLで前記閉鎖要素(313)を移動させることによって、開らかれかつ/または閉じられることを特徴とする、請求項13に記載の方法。
【請求項15】
前記閉鎖要素の前記供給部分(315)が可変開口断面積Aを有し、かつ前記閉鎖要素(313)の並進変位Lが、前記弁の開口断面積Aと直接的に相互関連することを特徴とする、請求項12から14のいずれか一項に記載の方法。
【請求項16】
前記閉鎖要素(313)が可変回転数ωで回転し、前記回転数ωが前記弁(310)を通り移動する質量流量
【数11】
と直接相互関連することを特徴とする、請求項12から15のいずれか一項に記載の方法。
【請求項17】
前記弁(310)がタッピング機構を装備し、可変タッピング周波数Fのタップが前記既に開いている弁に向けられ、前記タッピング周波数Fが前記弁(310)を通り移動する質量流量
【数12】
と直接相互関連することを特徴とする、請求項12から16のいずれか一項に記載の方法。
【請求項18】
自由流れ物質の測定される用量を受け入れ容器(100)内に充填するように働く投与量分配装置(300)を使用して、前記受け入れ容器(100)を貯蔵器(200)からの前記物質の所定の目標質量mzで充填するように動作可能な装置であって、前記投与量分配装置(300)が前記貯蔵器(200)から前記受け入れ容器(100)内への質量流量
【数13】
の可変設定を可能にする弁(310)を備え、かつ充填サイクルの開始から経過した時間tを求めるためのタイミング機能(400)、前記受け入れ容器(100)内に存在する物質の質量mを求めるための秤(500)、および前記弁(310)を制御するための制御器ユニット(600)とをさらに備える装置において、
前記制御器ユニット(600)が推定モジュール(610)および修正モジュール(620)を含み、
前記推定モジュール(610)が、前記充填サイクル中の少なくとも1つの時間tで、時間t2のときの前記充填サイクルの終了時に前記受け入れ容器(100)内に存在することが期待される質量
【数14】
の推定を実施するように動作可能であり、前記推定が、時間tから前記弁(310)があらかじめ画定された閉鎖プロフィールに従って閉じられつつあり、前記充填サイクルが時間t2で完了するという仮定に基づき、
前記修正モジュール(620)が、時間tで推定された前記質量
【数15】
を前記目標質量mzと比較するように動作可能であり、前記推定質量
【数16】
が前記目標質量mzより小さいことが見出される場合、時間tのとき存在する前記質量流量
【数17】
を伴う開口が差時間区間Δtだけより長く維持されるであろうように、かつ/または時間tでの前記質量流量
【数18】
が増加するように、前記弁(310)を制御することができることを特徴とする、装置。
【請求項19】
前記弁(310)が、ハウジング(311)、円形の開口断面を有する出口開口部(312)および閉鎖要素(313)とを備え、
前記出口開口部(312)および前記閉鎖要素(313)が共通の軸上に配置され、前記閉鎖要素(313)が前記共通の軸の周りを前記ハウジング(311)に対して回転可能であり、前記共通の軸に沿った並進移動で前記出口開口部(312)内に入りかつ出るように摺動可能であり、
前記閉鎖要素(313)の前記並進移動を介して前記弁が開閉するように、前記閉鎖要素(313)が円筒状の閉鎖部分(314)および供給部分(315)を有することを特徴とする、請求項18に記載の装置。
【請求項20】
前記閉鎖要素の前記供給部分(315)が可変の開口断面積Aを有し、前記閉鎖要素(313)の前記並進変位が前記弁(310)の前記開口断面積Aと直接的に相互関連することを特徴とする、請求項19に記載の装置。
【請求項21】
前記閉鎖要素(313)が、可変回転数ωを伴う回転に設定することができ、前面回転数ωが前記弁(310)を通り移動する質量流量
【数19】
と直接的に相互関連することを特徴とする、請求項18から20のいずれか一項に記載の装置。
【請求項22】
前記弁(310)が、可変タッピング周波数Fを有するタップを既に開いている前記弁に向けるように動作可能であるタッピング機構を備え、前記タッピング周波数Fが前記弁(310)を通り移動する質量流量
【数20】
と直接的に相互関連することを特徴とする、請求項18から21のいずれか一項に記載の装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−280287(P2009−280287A)
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【外国語出願】
【出願番号】特願2009−122671(P2009−122671)
【出願日】平成21年5月21日(2009.5.21)
【出願人】(599082218)メトラー−トレド アクチェンゲゼルシャフト (130)
【住所又は居所原語表記】Im Langacher, 8606 Greifensee, Switzerland
【Fターム(参考)】
【公開日】平成21年12月3日(2009.12.3)
【国際特許分類】
【出願番号】特願2009−122671(P2009−122671)
【出願日】平成21年5月21日(2009.5.21)
【出願人】(599082218)メトラー−トレド アクチェンゲゼルシャフト (130)
【住所又は居所原語表記】Im Langacher, 8606 Greifensee, Switzerland
【Fターム(参考)】
[ Back to top ]