
受信装置、移動角度推定方法、プログラム、および無線通信システム
【課題】受信装置、移動角度推定方法、プログラム、および無線通信システムを提供すること。
【解決手段】複数のアンテナと、前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と、前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と、を備える受信装置。
【解決手段】複数のアンテナと、前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と、前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と、を備える受信装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受信装置、移動角度推定方法、プログラム、および無線通信システムに関する。
【背景技術】
【0002】
従来、複数のアンテナを備え、複数のアンテナ間のキャリアの位相差から信号の到来角度を推定する受信装置が提案されている。ここで、複数のアンテナの間隔がキャリアの半波長以上である場合、複数のアンテナ間のキャリアの位相差と到来角度が一対一に対応しないため、一般的に複数のアンテナの間隔はキャリアの半波長以内になるように設計される。すなわち、例えば3つ以上のアンテナを備える受信装置においては、アンテナの配置に制約が生じる。
【0003】
一方、複数のアンテナの間隔が長いほど、到来角度の変化に対するキャリアの位相差の変化が大きいため、到来角度の変化に対する検出感度が向上する。このため、受信装置に設けるアンテナの数を増やすことにより、アンテナの間隔を半波長以内にしつつ、検出感度を向上させることができる。しかし、アンテナの数を増やすと、装置規模やコストが増大してしまう。
【0004】
また、特許文献1には、複数のアンテナ間での受信信号の位相差と、撮像装置による撮像画面とを複合的に利用することにより受信信号の到来角度を検出する方位検出装置が記載されている。
【0005】
【特許文献1】特開2007−263986号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、従来の方位検出装置では、到来角度の変化量から送信装置の移動角度を検出できたとしても、撮像装置を付加的に設ける必要があるため、装置規模およびコストが増大する点で問題である。
【0007】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、アンテナ配置に関する制約を抑制しつつ送信装置の移動角度を推定することが可能な、新規かつ改良された受信装置、移動角度推定方法、プログラム、および無線通信システムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明のある観点によれば、複数のアンテナと、前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と、前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と、を備える受信装置が提供される。
【0009】
前記受信装置は、前記差分算出部により算出された位相差の差分が閾値を上回った場合、前記送信装置に信号の送信間隔を短縮させる制御信号を生成する信号生成部をさらに備えてもよい。また、前記信号生成部は、前記差分算出部により算出された位相差の差分が0である場合、前記送信装置に信号の送信間隔を設定範囲内で最大にさせる制御信号を生成してもよい。
【0010】
前記受信装置は、前記複数のアンテナによる受信信号ごとに、前記送信装置および前記アンテナの間の伝送路のインパルス応答の極大値のうちで遅延時間が最も小さい極大値における位相を検出する位相検出部をさらに備え、前記位相差算出部は、前記位相検出部により検出された前記複数のアンテナによる受信信号ごとの位相の差分を算出してもよい。
【0011】
前記受信装置は、前記差分算出部により算出された位相差の差分、前記受信信号の波長、および前記送信装置の移動角度の関係を保持している関係保持部をさらに備え、前記移動角推定部は、前記関係保持部に保持されている関係、前記差分算出部により算出された位相差の差分、および前記受信信号の波長から前記送信装置の移動角度を推定してもよい。
【0012】
前記移動角推定部により推定された前記送信装置の移動角度を積分する積分演算部をさらに備えてもよい。また、前記差分算出部により算出された位相差の差分の大きさに応じ、前記送信装置に信号の送信間隔を動的に変化させる制御信号を生成する信号生成部をさらに備えてもよい。
【0013】
また、上記課題を解決するために、本発明の別の観点によれば、複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと、算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと、受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと、を含む移動角度推定方法が提供される。
【0014】
また、上記課題を解決するために、本発明の別の観点によれば、コンピュータに、複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと、算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと、受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと、を実行させるためのプログラムが提供される。
【0015】
また、上記課題を解決するために、本発明の別の観点によれば、送信装置と、複数のアンテナ、前記複数のアンテナ間での前記送信装置からの受信信号の位相差を算出する位相差算出部、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部、および、前記差分算出部により算出された位相差の差分から前記送信装置の移動角度を推定する移動角推定部、を有する受信装置と、
を備える無線通信システムが提供される。
【発明の効果】
【0016】
以上説明したように本発明にかかる受信装置、移動角度推定方法、プログラム、および無線通信システムによれば、アンテナ配置に関する制約を抑制しつつ送信装置の移動角度を推定することができる。
【発明を実施するための最良の形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0018】
また、以下に示す項目順序に従って当該「発明を実施するための最良の形態」を説明する。
1.第1の実施形態
1.1 第1の実施形態にかかる無線通信システム
1.2 第1の実施形態にかかる受信装置の構成
1.3 第1の実施形態にかかる受信装置の動作
2.第2の実施形態
3.まとめ、および補足
【0019】
<1.第1の実施形態>
[1.1 第1の実施形態にかかる無線通信システム]
まず、図1〜図4を参照し、本発明の第1の実施形態にかかる無線通信システム1の全体構成および要旨を概略的に説明する。
【0020】
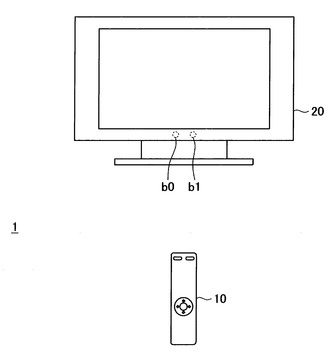
図1は、本発明の第1の実施形態にかかる無線通信システム1の全体構成を示した説明図である。図1に示したように、当該無線通信システム1は、送信装置10と受信装置20を備える。
【0021】
送信装置10は、間欠的にパケットを無線送信する。また、本実施形態においては、ユーザが送信装置10を保持し、送信装置10を空間的に移動させることを想定している。ただし、移動対象は送信装置10に限られず、移動対象は受信装置20であっても、送信装置10と受信装置20の双方であってもよい。
【0022】
受信装置20は、複数のアンテナb0およびb1を備え、送信装置10から送信されるパケットをアンテナb0およびb1で受信する。ここで、送信装置10から送信されるパケットは、IEEE(Institute of Electrical and Electronic Engineers)802.11a、b、gおよびnなどに準拠する無線LANのパケットであってもよい。なお、図1においては、複数のアンテナb0およびb1の間隔を模式的に示しているにすぎず、複数のアンテナb0およびb1は実際には図1に示したより近接していてもよい。
【0023】
また、図1においては送信装置10の一例としてリモートコントローラを示し、受信装置20の一例として表示装置を示しているが、本実施形態はかかる例に限定されない。例えば、送信装置10および受信装置20は、PC(Personal Computer)、家庭用映像処理装置、PDA(Personal Digital Assistants)、家庭用ゲーム機器、家電機器などの情報処理装置であってもよい。また、送信装置10および受信装置20は、携帯電話、PHS(Personal Handyphone System)、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってもよい。
【0024】
このような無線通信システム1における、受信装置20から見たパケットの到来角度と、複数のアンテナb0およびb1間でのパケットの位相差の関係について、図2および図3を参照して説明する。
【0025】
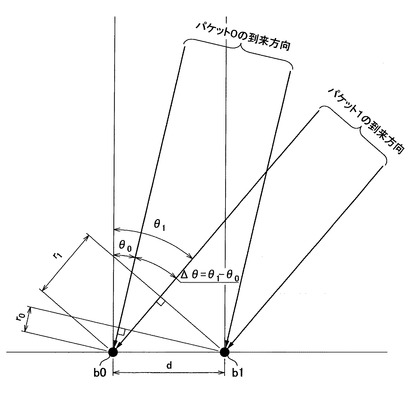
図2は、複数のアンテナb0およびb1とパケットの到来角度の関係を示した説明図である。図2において、dはアンテナb0およびb1間の距離を示し、θ0はパケット0の到来角度を示し、θ1はパケット1(パケット0の次のパケット)の到来角度を示している。また、図2において、r0はパケット0がアンテナb0へ到達するまでの距離とアンテナb1へ到達するまでの距離の差分を示し、r1はパケット1がアンテナb0へ到達するまでの距離とアンテナb1へ到達するまでの距離の差分を示している。このようなr0およびr1は、以下の数式1のように表現される。
r0=dsinθ0
r1=dsinθ1
(数式1)
【0026】
また、アンテナb0におけるパケット0の受信位相特性をα0,0、
アンテナb0におけるパケット1の受信位相特性をα0,1、
アンテナb1におけるパケット0の受信位相特性をα1,0、
アンテナb1におけるパケット1の受信位相特性をα1,1、
とすると、パケット0のアンテナb0およびアンテナb1間での位相差特性β0およびパケット1のアンテナb0およびアンテナb1間での位相差特性β1は以下の数式2のように表現される。なお、受信位相特性や位相差特性のように特性という語が付されているパラメータは、複素数で表現され、位相および振幅に関する情報を含むものとする。
β0=α1,0α0,0*
β1=α1,1α0,1*
(数式2)
【0027】
また、位相差特性β0の偏角arg(β0)、およびβ1の偏角arg(β1)は、アンテナ間の経路差であるr0およびr1と以下の数式3に示す関係を有する。なお、数式3中のλはパケットのキャリア波長に該当する。
arg(β0)=−2πr0/λ
arg(β1)=−2πr1/λ
(数式3)
【0028】
さらに、数式3に数式1を代入することにより、以下の数式4が得られる。
arg(β0)=−2π(dsinθ0)/λ
arg(β1)=−2π(dsinθ1)/λ
(数式4)
【0029】
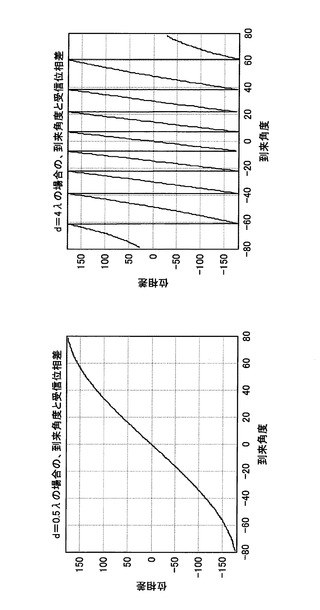
数式4より、アンテナb0およびb1間の距離d、キャリア波長λが既知であるとすれば、受信位相差特性β0およびβ1から、パケット0の到来角度θ0およびパケット1の到来角度θ1を推定できる。ただし、位相差特性βの偏角arg(β)、すなわちアンテナ間の位相差arg(β)とパケットの到来角度θの関係は、図3に示すように、アンテナb0およびb1間の距離dとキャリア波長λとの関係によって相違する。
【0030】
図3は、アンテナ間の位相差arg(β)とパケットの到来角度θの関係を示した説明図である。より詳細には、図3上図には、距離d=0.5λである場合のアンテナ間の位相差arg(β)とパケットの到来角度θの関係を示しており、図3下図には、距離d=4.0λである場合のアンテナ間の位相差βとパケットの到来角度θの関係を示している。
【0031】
図3上図に示したように、距離d≦キャリア波長λ/2である場合には、アンテナ間の位相差arg(β)とパケットの到来角度θが一対一に対応するため、アンテナ間の位相差arg(β)からパケットの到来角度θを正確に推定することが可能である。一方、図3下図に示したように、距離d>キャリア波長λ/2である場合には、アンテナ間の位相差arg(β)とパケットの到来角度θが一意に対応しないため、アンテナ間の位相差arg(β)からパケットの到来角度θを正確に推定することが困難である。
【0032】
しかし、本実施形態においては、距離d≦キャリア波長λ/2であるか否かにかかわらず、パケット0のアンテナ間の位相差β0およびパケット1のアンテナ間の位相差β1から、信号源である送信装置10の相対的な移動角度を推定することが可能である。以下、図4を参照して本実施形態の要旨を説明する。
【0033】
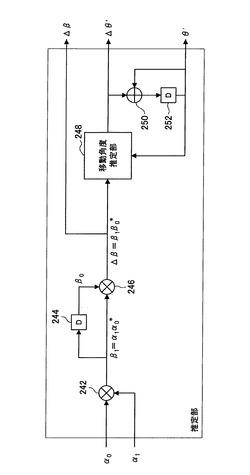
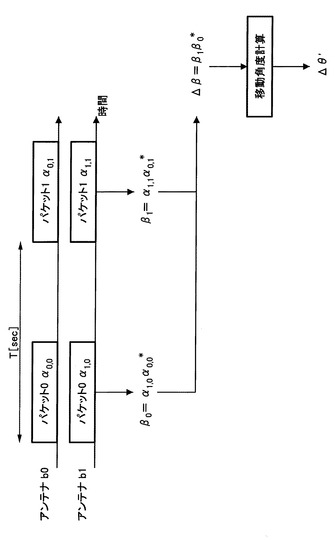
図4は、本実施形態の要旨を示した説明図である。図4に示したように、本実施形態においては、パケット0のアンテナ間の位相差特性β0、およびパケット1のアンテナ間の位相差特性β1の差分特性Δβから、送信装置10の相対的な移動角度Δθ’を算出する。ただし、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回る場合、送信装置10の相対的な移動角度Δθ’を正確に推定することが困難となる。そこで、本実施形態においては、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回らないよう工夫することにより、送信装置10の相対的な移動角度Δθ’の高い精度での推定を実現する。以下、このような効果を実現する本実施形態について、図5〜図10を参照して詳細に説明する。
【0034】
[1.2 第1の実施形態にかかる受信装置の構成]
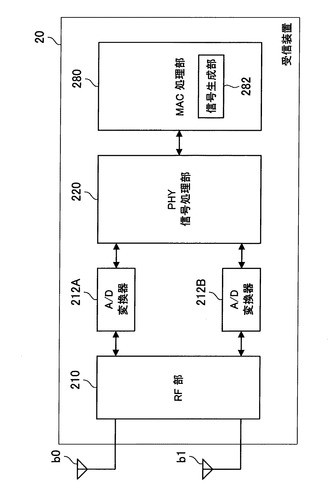
図5は、本発明の第1の実施形態にかかる受信装置20の構成を示した機能ブロック図である。図5に示したように、受信装置20は、アンテナb0およびb1と、RF部210と、A/D変換器212Aおよび210Bと、PHY信号処理部220と、MAC処理部280と、を備える。なお、以下では、実質的に同一機能を有する複数の構成の各々は、同一符号の後に異なるアルファベットを付することで区別する。しかし、同一機能を有する複数の構成の各々を特に区別する必要が無い場合、同一符号のみを付する。例えば、A/D変換器212Aおよび210Bを特に区別する必要が無い場合、単にA/D変換器212と総称する。
【0035】
(受信機能)
RF(Radio Frequency)部210は、アンテナb0およびb1により受信されたパケットの無線信号(受信信号)の各々をアナログ形式のベースバンド信号に変換して出力する。例えば、RF部210には、アンテナb0およびb1により受信された無線信号が高周波信号として入力される。RF部210は、入力された高周波信号をフィルタリングし、高周波信号に所定周波数を乗算してダウンコンバージョンすることによりアナログ形式のベースバンド信号への変換を行なう。
【0036】
A/D変換器212Aは、RF部210から入力されるアンテナb0により受信されたパケットのアナログ形式のベースバンド信号をサンプリング、および量子化することにより、デジタル形式のベースバンド信号に変換して出力する。同様に、A/D変換器212Bは、RF部210から入力されるアンテナb1により受信されたパケットのアナログ形式のベースバンド信号をサンプリング、および量子化することにより、デジタル形式のベースバンド信号に変換して出力する。
【0037】
PHY信号処理部220は、A/D変換器212から入力されるデジタル形式のベースバンド信号の復調およびデコードを行い、デコードされたパケットのデータを出力する。なお、PHY信号処理部220の詳細な構成については図6〜図9を参照して後述する。
【0038】
MAC処理部280は、PHY信号処理部220から入力されるデータの誤り検出やフレーム結合などを行なう。また、MAC処理部280は信号生成部282を有し、信号生成部282は送信装置10へ送信するための制御信号を生成する。当該制御信号は、後述するように、送信装置10にパケットの送信間隔を指示する情報が記載される。
【0039】
(送信機能)
PHY信号処理部220は、MAC処理部280から入力されるデータをデジタル形式のベースバンド信号に変換して出力する。なお、PHY信号処理部220は、MIMO(Multiple Input Multiple Output)送信を実現するために、入力されたデータを2系列のデジタル形式のベースバンド信号に変換してもよい。
【0040】
A/D変換器212は、PHY信号処理部220から入力されるデジタル形式のベースバンド信号をアナログ形式のベースバンド信号に変換して出力する。なお、通常送信の場合にはA/D変換器212AまたはA/D変換器212Bのいずれかが利用され、MIMO送信の場合には双方が利用される。
【0041】
RF部210は、A/D変換器212から入力されるアナログ形式のベースバンド信号を高周波信号に変換してアンテナbから無線信号として送信させる。なお、通常送信の場合にはアンテナb0またはb1のいずれかが利用され、MIMO送信の場合には双方が利用される。
【0042】
次に、図6を参照し、PHY信号処理部220の構成をより詳細に説明する。なお、以下では受信時のPHY信号処理部220の機能を説明するが、PHY信号処理部220はパケット送信のための信号処理機能も有する。
【0043】
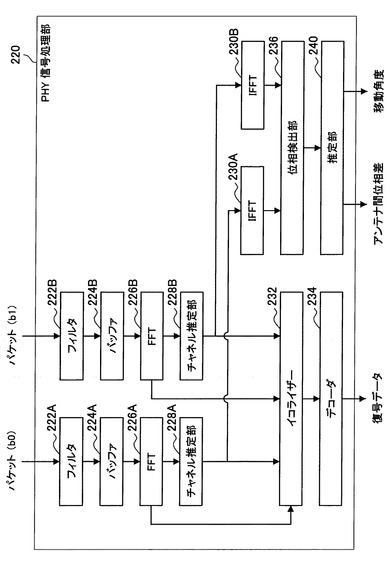
図6は、PHY信号処理部220の構成を示した機能ブロック図である。図6に示したように、PHY信号処理部220は、フィルタ222Aおよび222Bと、バッファ224Aおよび224Bと、FFT226Aおよび226Bと、チャネル推定部228Aおよび228Bと、IFFT230Aおよび230Bと、を含む。また、PHY信号処理部220は、イコライザ232と、デコーダ234と、位相検出部236と、推定部240と、を含む。
【0044】
フィルタ222Aにはアンテナb0により受信されたパケットのベースバンド信号が入力され、フィルタ222Aは、入力されたベースバンド信号から不要な周波数成分を除去するためのフィルタリングを行なう。同様に、フィルタ222Bにはアンテナb1により受信されたパケットのベースバンド信号が入力され、フィルタ222Bは、入力されたベースバンド信号から不要な周波数成分を除去するためのフィルタリングを行なう。
【0045】
バッファ224Aは、フィルタ222Aによりフィルタリングされたベースバンド信号を一時的に保持し、バッファ224Bは、フィルタ222Bによりフィルタリングされたースバンド信号を一時的に保持する。
【0046】
FFT(Fast Fourier Transform)226Aは、バッファ224Aに保持されているベースバンド信号を、OFDM(Orthogonal Frequency Division Multiplexing)シンボルごとにFFTする。同様に、FFT226Bは、バッファ224Bに保持されているベースバンド信号を、OFDMシンボルごとにFFTする。
【0047】
チャネル推定部228Aは、FFT226Aにより得られたサブキャリアごとの信号成分に基づき、送信装置10およびアンテナb0間を含む伝送路特性をサブキャリアごとに測定する。例えば、チャネル推定部228Aは、パケットのプリアンブル部分に含まれるショートトレーニングシンボルやロングトレーニングシンボルでサブキャリアごとの伝送路特性を測定してもよい。同様に、チャネル推定部228Bは、FFT226Bにより得られたサブキャリアごとの信号成分に基づき、送信装置10およびアンテナb1間を含む伝送路特性をサブキャリアごとに測定する。
【0048】
イコライザ232は、FFT226Aから入力されるサブキャリアごとの信号から、チャネル推定部228Aにより推定された伝送路特性に基づいて伝送路の歪み成分を除去してチャネル等化を行なう。また、イコライザ232は、FFT226Bから入力されるサブキャリアごとの信号から、チャネル推定部228Bにより推定された伝送路特性に基づいて伝送路の歪み成分を除去してチャネル等化を行なう。なお、受信装置20がMIMO受信を行なう場合、イコライザ232はMIMO受信処理を行う。
【0049】
デコーダ234は、イコライザ232によりしてチャネル等化されたサブキャリアごとの信号の復調、およびデコードを行ってパケットの復号データを取得する。そして、デコーダ234はパケットの復号データをMAC処理部280へ出力する。
【0050】
IFFT(Inverse FFT)230Aは、チャネル推定部228Aから入力されるサブキャリアごとの伝送路特性に逆高速フーリエ変換を施すことにより、送信装置10およびアンテナb0間を含む伝送路の時間領域におけるインパルス応答を得る。同様に、IFFT230Bは、チャネル推定部228Bから入力されるサブキャリアごとの伝送路特性に逆高速フーリエ変換を施すことにより、送信装置10およびアンテナb1間を含む伝送路の時間領域におけるインパルス応答を得る。
【0051】
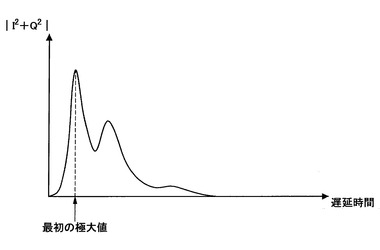
位相検出部236は、IFFT230Aおよび230Bにより得られた伝送路のインパルス応答から、アンテナb0およびb1により受信されたパケットの各々の直接波の位相特性を推定する。図7は、伝送路のインパルス応答の振幅レベルを示した説明図である。図7に示したように、インパルス応答の振幅レベル(│I2+Q2│)は複数の極大値を有する。そのうちで遅延時間が最も小さい最初の極大値が直接波に対応していると考えられる。このため、位相検出部236は、インパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における複素受信特性(I+jQ)を、受信パケットの位相角度を有する信号として検出する。
【0052】
より具体的には、位相検出部236は、IFFT230Aにより得られたインパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における位相特性α0をアンテナb0による受信パケットの位相特性として検出する。同様に、位相検出部236は、IFFT230Bにより得られたインパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における位相特性α1をアンテナb1による受信パケットの位相特性として検出する。
【0053】
推定部240は、位相検出部236により検出されたアンテナb0による受信パケットの位相特性α0およびアンテナb1による受信パケットの位相特性α1から、送信装置10の相対的な移動角度を推定する。なお、本実施形態における移動角度は、アンテナb0およびb1の離隔方向に垂直な軸を回転軸とする角度である。以下、図8を参照し、推定部240の構成について詳細に説明する。
【0054】
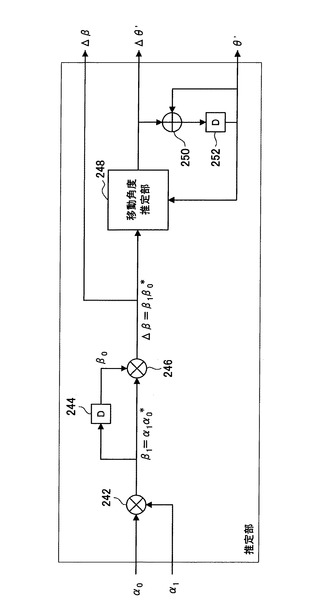
図8は、推定部240の構成を示した機能ブロック図である。図8に示したように、推定部240は、複素乗算部242および246と、遅延部244および252と、移動角度推定部248と、加算部250と、を備える。
【0055】
複素乗算部242は、位相α1と位相α0の複素共役とを乗算することにより、パケット1のアンテナ間の位相差β1を算出する位相差算出部として機能する。遅延部244は、複素乗算部242により算出された位相差特性が入力され、入力された位相差特性を遅延して出力する。図8には、遅延部244が複素乗算部242により前回(以前に)算出されたパケット0のアンテナ間の位相差特性β0を遅延して出力している例を示している。
【0056】
複素乗算部246は、パケット1のアンテナ間の位相差特性β1およびパケット0のアンテナ間の位相差特性β0の複素共役とを乗算することにより、パケット間の位相差の差分特性Δβを算出する差分算出部として機能する。
【0057】
移動角度推定部248には、パケット間の位相差の差分特性Δβ、および前回のパケット0の到来角度θ’より、送信装置10の相対的な移動角度Δθ’を推定する。パケット間の位相差の差分特性Δβ、前回のパケット0の到来角度θ’、および移動角度Δθ’は、例えば以下の数式5のように表現される。
【0058】
【数1】

(数式5)
【0059】
移動角度推定部248は、上記の数式5にパケット間の位相差の差分特性Δβ、および前回のパケット0の到来角度θ’を代入することにより、送信装置10の相対的な移動角度Δθ’を推定することができる。なお、移動角度推定部248(関係保持部)は、パケット間の位相差の差分Δβ、前回のパケット0の到来角度θ’、およびキャリア波長λなどの関係を示すテーブルを保持していてもよい。そして、移動角度推定部248は、当該テーブルを参照することにより送信装置10の相対的な移動角度Δθ’を推定してもよい。
【0060】
このようにして移動角度推定部248により推定された移動角度Δθ’は、例えば、受信装置20または受信装置20に接続されるアプリケーション機器(例えばゲーム機器)へのユーザ操作として利用される。
【0061】
また、前回のパケット0の到来角度θ’は、移動角度推定部248により推定された移動角度Δθ’と加算部250により加算され、パケット1の到来角度θ’に更新される。すなわち、加算部250は、これまでの移動角度Δθ’を累積的に加算して到来角度θ’を算出する積分演算部として機能する。当該パケット1の到来角度θ’は遅延部252により遅延して出力され、移動角度推定部248によるパケット2の移動角度Δθ’の推定時に利用される。
【0062】
なお、上記では移動角度Δθ’の推定に際し、数式5に示したように前回のパケット0の到来角度θ’が利用される例を説明したが、本実施形態はかかる例に限定されない。例えば、移動角度Δθ’および到来角度θ’が極めて0に近い場合、x=sinxと近似できることが知られている。したがって、上記数式5を、以下の数式6のように置き換えることにより、移動角度Δθ’の推定に際して前回のパケット0の到来角度θ’を不要とすることも可能である。
【0063】
【数2】
(数式6)
【0064】
また、移動角度Δθ’の推定に際し、数式5に示したように前回のパケット0の到来角度θ’を利用する場合、到来角度θ’の初期値は任意の方法により特定することができる。例えば、移動角度推定部248は、起動時のパケットの到来角度θ’を初期値0と特定してもよいし、ユーザにより所定操作が行なわれたときのパケットの到来角度θ’を初期値0と特定してもよい。
【0065】
このように、本実施形態によれば、アンテナ間の位相差特性β0やβ1に基づいて送信装置10の移動角度を推定することができる。ただし、移動による生じるパケット間の位相差の差分arg(Δβ)が±π(rad)を上回る場合、送信装置10の相対的な移動角度Δθ’を正確に推定することが困難となる。そこで、本実施形態にかかる受信装置20は、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回らないよう、以下に説明する機能を有する。
【0066】
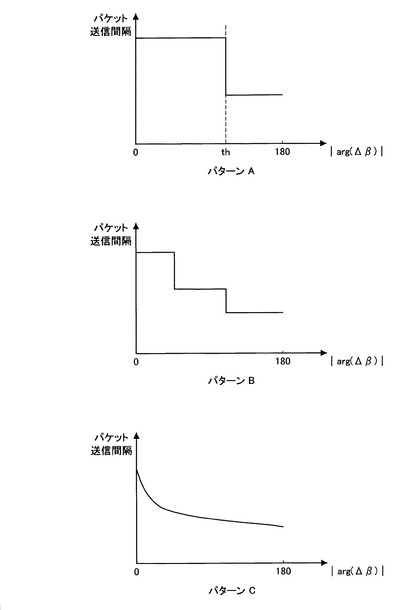
図8に示したように、パケット間のアンテナ位相差の差分特性ΔβはMAC処理部280へ出力される。MAC処理部280の信号生成部282は、パケット間のアンテナ位相差の差分特性Δβの偏角の大きさ|arg(Δβ)|、すなわちパケット間のアンテナ位相差の差分|arg(Δβ)|に基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。そして、送信装置10は、当該制御信号に記載されたパケット送信間隔でパケットを送信する。信号生成部282は、例えば図9に示すパターンに従ってパケット送信間隔を特定してもよい。
【0067】
図9は、パケット間のアンテナ位相差の差分|arg(Δβ)|と送信装置10に対して要求するパケット送信間隔の関係を示した説明図である。パターンAにおいては、パケット間のアンテナ位相差の差分|arg(Δβ)|が所定の閾値thを越えるまでは送信間隔が一定であり、所定の閾値thを越えると送信間隔が短縮される。このため、送信装置10の角移動速度が同一であった場合にもパケット間のアンテナ位相差の差分|arg(Δβ)|が小さくなるため、|arg(Δβ)|が±π(rad)を上回ることを防止することができる。
【0068】
また、パターンBにおいては、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなると送信間隔が段階的に短縮される。ここで、パケット間のアンテナ位相差の差分|arg(Δβ)|が0である場合、送信装置10は移動していないため、|arg(Δβ)|が±πを上回る可能性は低いと考えられる。そこで、パターンBに示したように、パケット間のアンテナ位相差の差分|arg(Δβ)|が0である場合には、設定範囲内で最大の送信間隔を適用することにより、送信装置10から不要に多量のパケットが送信されてしまう場合を防止できる。
【0069】
また、パターンCに示したように、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなるにつれて送信間隔が連続的に短縮されるようにしてもよい。より詳細には、パターンCには、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなるほど、送信間隔の短縮時間が少なくなる例を示している。このパターンCにおいても、送信装置10から不要に多量のパケットが送信されてしまう場合、およびパケット間のアンテナ位相差の差分arg(Δβ)が±π(rad)を上回ってしまう場合を防止することができる。
【0070】
なお、上記ではパケット間のアンテナ位相差の差分|arg(Δβ)|に応じて送信装置10に動的にパケットの送信間隔を変化させる例を説明したが、本実施形態はかかる例に限定されない。例えば、送信装置10は、常に、想定される送信装置10の最大の角移動速度においてもアンテナ位相差の差分|arg(Δβ)|が±π(rad)を上回らない送信間隔でパケットを送信してもよい。
【0071】
また、上記では受信装置20が具体的なパケットの送信間隔を送信装置10に指示する例を説明したが、本実施形態はかかる例に限定されない。例えば、受信装置20は、単にパケットの送信間隔を短くするよう指示する制御信号を送信しても、長くするよう指示する制御信号を送信してもよい。
【0072】
また、上記では受信装置20がパケットの送信間隔を送信装置10に指示する例を説明したが、本実施形態はかかる例に限定されない。例えば、受信装置20はパケット間のアンテナ位相差の差分|arg(Δβ)|を記載した制御信号を送信装置10へ送信し、送信装置10においてパケット間のアンテナ位相差の差分|arg(Δβ)|に対応する送信間隔を特定してもよい。
【0073】
[1.3 第1の実施形態にかかる受信装置の動作]
以上、図5〜図9を参照して本実施形態にかかる受信装置20の構成を説明した。続いて、図10を参照し、本実施形態にかかる受信装置20において実行される移動角度推定方法について説明する。
【0074】
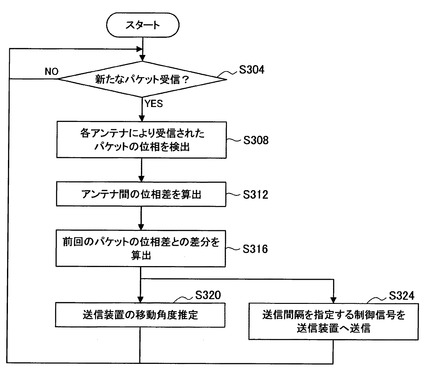
図10は、第1の実施形態にかかる受信装置20において実行される移動角度推定方法の流れを示したフローチャートである。図10に示したように、送信装置10から送信された新たなパケットがアンテナb0およびb1により受信されると(S304)、位相検出部236がアンテナb0およびb1により受信されたパケットの位相を検出する(S308)。
【0075】
そして、推定部240の複素乗算部242が、アンテナb0およびb1により受信されたパケットの位相差を算出し(S312)、当該位相差と前回のパケットの位相差との差分を複素乗算部246が算出する(S316)。さらに、複素乗算部246により算出されたパケット間のアンテナ位相差の差分に基づき、移動角度推定部248が送信装置10の移動角度を推定する(S320)。
【0076】
一方、MAC処理部280の信号生成部282は、複素乗算部246により算出されたパケット間のアンテナ位相差の差分に応じて送信装置10に要求するパケットの送信間隔を特定し、当該送信間隔が記載された制御信号を生成する。信号生成部282により生成されたこの制御信号は、PHY信号処理部220、A/D変換器212Aおよび210B、RF部210、アンテナb0およびb1を介して送信装置10へ送信される(S324)。その後、S304からの処理が繰り返される。
【0077】
<2.第2の実施形態>
以上説明した第1の実施形態では、受信装置20に2つのアンテナb0およびb1が設けられていた。しかし、受信装置20に設けられるアンテナの数は2つに限定されない。例えば、以下に説明する第2の実施形態にかかる受信装置20’のように、設けられるアンテナの数は3つであってもよい。
【0078】
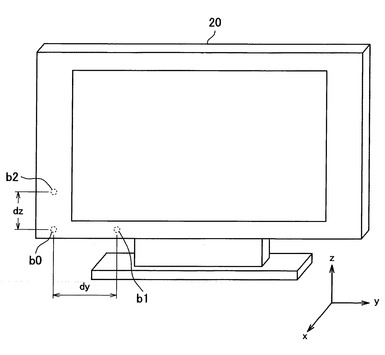
図11は、本発明の第2の実施形態にかかる受信装置20’におけるアンテナの配置例を示した説明図である。図11に示したように、第2の実施形態にかかる受信装置20’には、アンテナb1がアンテナb0とy方向に距離dyだけ離隔して配置され、アンテナb2がアンテナb0とz方向に距離dzだけ離隔して配置されている。なお、図11においては、複数のアンテナの間隔を模式的に示しているにすぎず、複数のアンテナは実際には図11に示したより近接していてもよい。
【0079】
かかる構成によれば、第2の実施形態にかかる受信装置20’は、y方向に離隔して配置されているアンテナb1およびアンテナb0による受信パケットの位相差に基づき、送信装置10のz軸を回転軸とする移動角度を推定することができる。さらに、第2の実施形態にかかる受信装置20’は、z方向に離隔して配置されているアンテナb2およびアンテナb0による受信パケットの位相差に基づき、送信装置10のy軸を回転軸とする移動角度を推定することができる。以下、図12を参照して上記移動角度の推定を実現するための構成について説明する。
【0080】
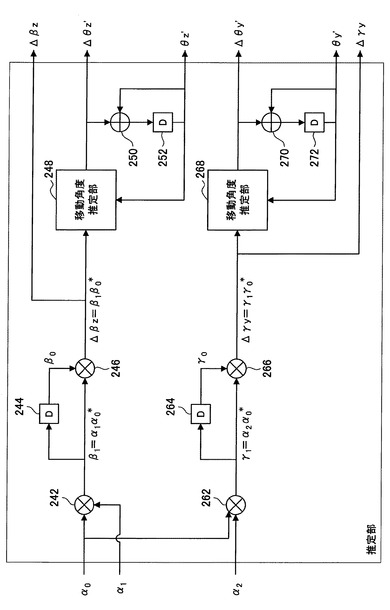
図12は、第2の実施形態にかかる受信装置20’の推定部240’の構成を示した機能ブロック図である。図12に示したように、推定部240’は、複素乗算部242、246、262および266と、遅延部244、252、264および272と、移動角度推定部248および268と、加算部250および270と、を備える。
【0081】
複素乗算部242は、アンテナb1による受信パケットの位相特性α1とアンテナb0による受信パケットの位相特性α0の複素共役とを乗算することにより、パケット1のアンテナb0およびb1間の位相差特性β1を算出する。遅延部244は、複素乗算部242により算出された位相差が入力され、入力された位相差を遅延して出力する。図12には、遅延部244が複素乗算部242により前回(以前に)算出されたパケット0のアンテナ間の位相差β0を遅延して出力している例を示している。
【0082】
複素乗算部246は、パケット1のアンテナ間の位相差β1およびパケット0のアンテナ間の位相差特性β0の複素共役とを乗算することにより、パケット間のアンテナ位相差の差分特性Δβzを算出する。
【0083】
移動角度推定部248には、パケット間のアンテナ位相差の差分特性Δβz、および前回のパケット0の到来角度θz’より、送信装置10の移動角度Δθz’を推定する。なお、到来角度θz’および移動角度Δθz’は、図11に示したz軸を回転軸とする角度である。
【0084】
また、前回のパケット0の到来角度θz’は、移動角度推定部248により推定された移動角度Δθz’と加算部250により加算され、パケット1の到来角度θz’に更新される。当該パケット1の到来角度θz’は遅延部252により遅延して出力され、移動角度推定部248によるパケット2の移動角度Δθz’の推定時に利用される。
【0085】
同様に、複素乗算部262は、アンテナb2による受信パケットの位相特性α2とアンテナb0による受信パケットの位相特性α0の複素共役とを乗算することにより、パケット1のアンテナb0およびb2間の位相差特性γ1を算出する。遅延部264は、複素乗算部262により算出された位相差が入力され、入力された位相差を遅延して出力する。図12には、遅延部264が複素乗算部262により前回(以前に)算出されたパケット0のアンテナ間の位相差特性γ0を遅延して出力している例を示している。
【0086】
複素乗算部266は、パケット1のアンテナ間の位相差特性γ1およびパケット0のアンテナ間の位相差特性γ0の複素共役とを乗算することにより、パケット間のアンテナ位相差の差分特性Δγyを算出する。
【0087】
移動角度推定部268には、パケット間のアンテナ位相差の差分特性Δγy、および前回のパケット0の到来角度θy’より、送信装置10の移動角度Δθy’を推定する。なお、到来角度θy’および移動角度Δθy’は、図11に示したy軸を回転軸とする角度である。
【0088】
また、前回のパケット0の到来角度θy’は、移動角度推定部268により推定された移動角度Δθy’と加算部270により加算され、パケット1の到来角度θy’に更新される。当該パケット1の到来角度θy’は遅延部272により遅延して出力され、移動角度推定部268によるパケット2の移動角度Δθy’の推定時に利用される。
【0089】
また、図12に示したように、パケット間のアンテナ位相差の差分特性ΔβzおよびΔ特性γyはMAC処理部280へ出力される。MAC処理部280の信号生成部282は、パケット間のアンテナ位相差の差分特性ΔβzおよびΔγyの偏角の大きさに基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。
【0090】
例えば、第2の実施形態においては、信号生成部282は、パケット間のアンテナ位相差の差分特性ΔβzおよびΔγyの双方について対応する送信間隔を特定し、送信装置10に要求する送信間隔を短い方の送信間隔に決定してもよい。かかる構成により、パケット間のアンテナ位相差の差分特性ΔβzまたはΔγyの偏角が±π(rad)を上回ってしまう場合を防止し、送信装置10の複数方向の移動角度を高精度に推定することが可能となる。
【0091】
<3.まとめ、および補足>
以上説明したように、本実施形態によれば、アンテナ間の距離とキャリア波長の関係にかかわらず、送信装置10の移動角度を検出することができる。したがって、アンテナの配置の自由度を高めることができる。さらに、本実施形態によれば、アンテナ間隔を大きくできるため、送信装置10の移動角度や到来角度の検出精度の向上が期待される。また、アンテナ間のキャリブレーションも不要である。
【0092】
さらに、本実施形態によれば、信号生成部282が、パケット間のアンテナ位相差の差分の大きさに基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。かかる構成により、送信装置10から不要に多量のパケットが送信されてしまう場合、およびパケット間のアンテナ位相差の差分が±π(rad)を上回ってしまう場合を防止することができる。
【0093】
なお、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0094】
例えば、本明細書の受信装置20の処理における各ステップは、必ずしもフローチャートとして記載された順序に沿って時系列に処理する必要はない。例えば、受信装置20の処理における各ステップは、並列的あるいは個別に実行される処理(例えば、並列処理あるいはオブジェクトによる処理)を含んでもよい。
【0095】
また、上記実施形態では、1つの信号源からパケットを送信する送信装置10の移動角度を推定する例を説明したが、本発明はかかる例に限定されない。例えば、複数の信号源からパケットをMIMO送信するMIMOトランシーバにも本発明を適用することが可能である。この場合、受信装置20は、複数の信号源に対する到来角度や移動角度を検出することができるため、MIMOトランシーバの向きの変化、およびMIMOトランシーバの向きそのものを検出することも可能である。
【0096】
また、受信装置20に内蔵されるCPU、ROMおよびRAMなどのハードウェアを、上述した受信装置20の各構成と同等の機能を発揮させるためのコンピュータプログラムも作成可能である。また、該コンピュータプログラムを記憶させた記憶媒体も提供される。また、図6および図8の機能ブロック図で示したそれぞれの機能ブロックをハードウェアで構成することで、一連の処理をハードウェアで実現することもできる。
【図面の簡単な説明】
【0097】
【図1】本発明の第1の実施形態にかかる無線通信システムの全体構成を示した説明図である。
【図2】複数のアンテナとパケットの到来角度の関係を示した説明図である。
【図3】位相差arg(β)とパケットの到来角度の関係を示した説明図である。
【図4】本実施形態の要旨を示した説明図である。
【図5】本発明の第1の実施形態にかかる受信装置の構成を示した機能ブロック図である。
【図6】PHY信号処理部の構成を示した機能ブロック図である。
【図7】伝送路のインパルス応答の振幅レベルを示した説明図である。
【図8】推定部の構成を示した機能ブロック図である。
【図9】パケット間のアンテナ位相差の差分と送信装置に対して要求するパケット送信間隔の関係を示した説明図である。
【図10】第1の実施形態にかかる受信装置において実行される移動角度推定方法の流れを示したフローチャートである。
【図11】本発明の第2の実施形態にかかる受信装置におけるアンテナの配置例を示した説明図である。
【図12】第2の実施形態にかかる受信装置の推定部の構成を示した機能ブロック図である。
【符号の説明】
【0098】
10 送信装置
20 受信装置
210 RF部
220 PHY信号処理部
228 チャネル推定部
230 IFFT
236 位相検出部
240 推定部
242、246、262、266 複素乗算部
248、268 移動角度推定部
250、270 加算部
280 MAC処理部
282 信号生成部
【技術分野】
【0001】
本発明は、受信装置、移動角度推定方法、プログラム、および無線通信システムに関する。
【背景技術】
【0002】
従来、複数のアンテナを備え、複数のアンテナ間のキャリアの位相差から信号の到来角度を推定する受信装置が提案されている。ここで、複数のアンテナの間隔がキャリアの半波長以上である場合、複数のアンテナ間のキャリアの位相差と到来角度が一対一に対応しないため、一般的に複数のアンテナの間隔はキャリアの半波長以内になるように設計される。すなわち、例えば3つ以上のアンテナを備える受信装置においては、アンテナの配置に制約が生じる。
【0003】
一方、複数のアンテナの間隔が長いほど、到来角度の変化に対するキャリアの位相差の変化が大きいため、到来角度の変化に対する検出感度が向上する。このため、受信装置に設けるアンテナの数を増やすことにより、アンテナの間隔を半波長以内にしつつ、検出感度を向上させることができる。しかし、アンテナの数を増やすと、装置規模やコストが増大してしまう。
【0004】
また、特許文献1には、複数のアンテナ間での受信信号の位相差と、撮像装置による撮像画面とを複合的に利用することにより受信信号の到来角度を検出する方位検出装置が記載されている。
【0005】
【特許文献1】特開2007−263986号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、従来の方位検出装置では、到来角度の変化量から送信装置の移動角度を検出できたとしても、撮像装置を付加的に設ける必要があるため、装置規模およびコストが増大する点で問題である。
【0007】
そこで、本発明は、上記問題に鑑みてなされたものであり、本発明の目的とするところは、アンテナ配置に関する制約を抑制しつつ送信装置の移動角度を推定することが可能な、新規かつ改良された受信装置、移動角度推定方法、プログラム、および無線通信システムを提供することにある。
【課題を解決するための手段】
【0008】
上記課題を解決するために、本発明のある観点によれば、複数のアンテナと、前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と、前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と、を備える受信装置が提供される。
【0009】
前記受信装置は、前記差分算出部により算出された位相差の差分が閾値を上回った場合、前記送信装置に信号の送信間隔を短縮させる制御信号を生成する信号生成部をさらに備えてもよい。また、前記信号生成部は、前記差分算出部により算出された位相差の差分が0である場合、前記送信装置に信号の送信間隔を設定範囲内で最大にさせる制御信号を生成してもよい。
【0010】
前記受信装置は、前記複数のアンテナによる受信信号ごとに、前記送信装置および前記アンテナの間の伝送路のインパルス応答の極大値のうちで遅延時間が最も小さい極大値における位相を検出する位相検出部をさらに備え、前記位相差算出部は、前記位相検出部により検出された前記複数のアンテナによる受信信号ごとの位相の差分を算出してもよい。
【0011】
前記受信装置は、前記差分算出部により算出された位相差の差分、前記受信信号の波長、および前記送信装置の移動角度の関係を保持している関係保持部をさらに備え、前記移動角推定部は、前記関係保持部に保持されている関係、前記差分算出部により算出された位相差の差分、および前記受信信号の波長から前記送信装置の移動角度を推定してもよい。
【0012】
前記移動角推定部により推定された前記送信装置の移動角度を積分する積分演算部をさらに備えてもよい。また、前記差分算出部により算出された位相差の差分の大きさに応じ、前記送信装置に信号の送信間隔を動的に変化させる制御信号を生成する信号生成部をさらに備えてもよい。
【0013】
また、上記課題を解決するために、本発明の別の観点によれば、複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと、算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと、受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと、を含む移動角度推定方法が提供される。
【0014】
また、上記課題を解決するために、本発明の別の観点によれば、コンピュータに、複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと、算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと、受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと、を実行させるためのプログラムが提供される。
【0015】
また、上記課題を解決するために、本発明の別の観点によれば、送信装置と、複数のアンテナ、前記複数のアンテナ間での前記送信装置からの受信信号の位相差を算出する位相差算出部、前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部、および、前記差分算出部により算出された位相差の差分から前記送信装置の移動角度を推定する移動角推定部、を有する受信装置と、
を備える無線通信システムが提供される。
【発明の効果】
【0016】
以上説明したように本発明にかかる受信装置、移動角度推定方法、プログラム、および無線通信システムによれば、アンテナ配置に関する制約を抑制しつつ送信装置の移動角度を推定することができる。
【発明を実施するための最良の形態】
【0017】
以下に添付図面を参照しながら、本発明の好適な実施の形態について詳細に説明する。なお、本明細書及び図面において、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重複説明を省略する。
【0018】
また、以下に示す項目順序に従って当該「発明を実施するための最良の形態」を説明する。
1.第1の実施形態
1.1 第1の実施形態にかかる無線通信システム
1.2 第1の実施形態にかかる受信装置の構成
1.3 第1の実施形態にかかる受信装置の動作
2.第2の実施形態
3.まとめ、および補足
【0019】
<1.第1の実施形態>
[1.1 第1の実施形態にかかる無線通信システム]
まず、図1〜図4を参照し、本発明の第1の実施形態にかかる無線通信システム1の全体構成および要旨を概略的に説明する。
【0020】
図1は、本発明の第1の実施形態にかかる無線通信システム1の全体構成を示した説明図である。図1に示したように、当該無線通信システム1は、送信装置10と受信装置20を備える。
【0021】
送信装置10は、間欠的にパケットを無線送信する。また、本実施形態においては、ユーザが送信装置10を保持し、送信装置10を空間的に移動させることを想定している。ただし、移動対象は送信装置10に限られず、移動対象は受信装置20であっても、送信装置10と受信装置20の双方であってもよい。
【0022】
受信装置20は、複数のアンテナb0およびb1を備え、送信装置10から送信されるパケットをアンテナb0およびb1で受信する。ここで、送信装置10から送信されるパケットは、IEEE(Institute of Electrical and Electronic Engineers)802.11a、b、gおよびnなどに準拠する無線LANのパケットであってもよい。なお、図1においては、複数のアンテナb0およびb1の間隔を模式的に示しているにすぎず、複数のアンテナb0およびb1は実際には図1に示したより近接していてもよい。
【0023】
また、図1においては送信装置10の一例としてリモートコントローラを示し、受信装置20の一例として表示装置を示しているが、本実施形態はかかる例に限定されない。例えば、送信装置10および受信装置20は、PC(Personal Computer)、家庭用映像処理装置、PDA(Personal Digital Assistants)、家庭用ゲーム機器、家電機器などの情報処理装置であってもよい。また、送信装置10および受信装置20は、携帯電話、PHS(Personal Handyphone System)、携帯用音楽再生装置、携帯用映像処理装置、携帯用ゲーム機器などの情報処理装置であってもよい。
【0024】
このような無線通信システム1における、受信装置20から見たパケットの到来角度と、複数のアンテナb0およびb1間でのパケットの位相差の関係について、図2および図3を参照して説明する。
【0025】
図2は、複数のアンテナb0およびb1とパケットの到来角度の関係を示した説明図である。図2において、dはアンテナb0およびb1間の距離を示し、θ0はパケット0の到来角度を示し、θ1はパケット1(パケット0の次のパケット)の到来角度を示している。また、図2において、r0はパケット0がアンテナb0へ到達するまでの距離とアンテナb1へ到達するまでの距離の差分を示し、r1はパケット1がアンテナb0へ到達するまでの距離とアンテナb1へ到達するまでの距離の差分を示している。このようなr0およびr1は、以下の数式1のように表現される。
r0=dsinθ0
r1=dsinθ1
(数式1)
【0026】
また、アンテナb0におけるパケット0の受信位相特性をα0,0、
アンテナb0におけるパケット1の受信位相特性をα0,1、
アンテナb1におけるパケット0の受信位相特性をα1,0、
アンテナb1におけるパケット1の受信位相特性をα1,1、
とすると、パケット0のアンテナb0およびアンテナb1間での位相差特性β0およびパケット1のアンテナb0およびアンテナb1間での位相差特性β1は以下の数式2のように表現される。なお、受信位相特性や位相差特性のように特性という語が付されているパラメータは、複素数で表現され、位相および振幅に関する情報を含むものとする。
β0=α1,0α0,0*
β1=α1,1α0,1*
(数式2)
【0027】
また、位相差特性β0の偏角arg(β0)、およびβ1の偏角arg(β1)は、アンテナ間の経路差であるr0およびr1と以下の数式3に示す関係を有する。なお、数式3中のλはパケットのキャリア波長に該当する。
arg(β0)=−2πr0/λ
arg(β1)=−2πr1/λ
(数式3)
【0028】
さらに、数式3に数式1を代入することにより、以下の数式4が得られる。
arg(β0)=−2π(dsinθ0)/λ
arg(β1)=−2π(dsinθ1)/λ
(数式4)
【0029】
数式4より、アンテナb0およびb1間の距離d、キャリア波長λが既知であるとすれば、受信位相差特性β0およびβ1から、パケット0の到来角度θ0およびパケット1の到来角度θ1を推定できる。ただし、位相差特性βの偏角arg(β)、すなわちアンテナ間の位相差arg(β)とパケットの到来角度θの関係は、図3に示すように、アンテナb0およびb1間の距離dとキャリア波長λとの関係によって相違する。
【0030】
図3は、アンテナ間の位相差arg(β)とパケットの到来角度θの関係を示した説明図である。より詳細には、図3上図には、距離d=0.5λである場合のアンテナ間の位相差arg(β)とパケットの到来角度θの関係を示しており、図3下図には、距離d=4.0λである場合のアンテナ間の位相差βとパケットの到来角度θの関係を示している。
【0031】
図3上図に示したように、距離d≦キャリア波長λ/2である場合には、アンテナ間の位相差arg(β)とパケットの到来角度θが一対一に対応するため、アンテナ間の位相差arg(β)からパケットの到来角度θを正確に推定することが可能である。一方、図3下図に示したように、距離d>キャリア波長λ/2である場合には、アンテナ間の位相差arg(β)とパケットの到来角度θが一意に対応しないため、アンテナ間の位相差arg(β)からパケットの到来角度θを正確に推定することが困難である。
【0032】
しかし、本実施形態においては、距離d≦キャリア波長λ/2であるか否かにかかわらず、パケット0のアンテナ間の位相差β0およびパケット1のアンテナ間の位相差β1から、信号源である送信装置10の相対的な移動角度を推定することが可能である。以下、図4を参照して本実施形態の要旨を説明する。
【0033】
図4は、本実施形態の要旨を示した説明図である。図4に示したように、本実施形態においては、パケット0のアンテナ間の位相差特性β0、およびパケット1のアンテナ間の位相差特性β1の差分特性Δβから、送信装置10の相対的な移動角度Δθ’を算出する。ただし、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回る場合、送信装置10の相対的な移動角度Δθ’を正確に推定することが困難となる。そこで、本実施形態においては、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回らないよう工夫することにより、送信装置10の相対的な移動角度Δθ’の高い精度での推定を実現する。以下、このような効果を実現する本実施形態について、図5〜図10を参照して詳細に説明する。
【0034】
[1.2 第1の実施形態にかかる受信装置の構成]
図5は、本発明の第1の実施形態にかかる受信装置20の構成を示した機能ブロック図である。図5に示したように、受信装置20は、アンテナb0およびb1と、RF部210と、A/D変換器212Aおよび210Bと、PHY信号処理部220と、MAC処理部280と、を備える。なお、以下では、実質的に同一機能を有する複数の構成の各々は、同一符号の後に異なるアルファベットを付することで区別する。しかし、同一機能を有する複数の構成の各々を特に区別する必要が無い場合、同一符号のみを付する。例えば、A/D変換器212Aおよび210Bを特に区別する必要が無い場合、単にA/D変換器212と総称する。
【0035】
(受信機能)
RF(Radio Frequency)部210は、アンテナb0およびb1により受信されたパケットの無線信号(受信信号)の各々をアナログ形式のベースバンド信号に変換して出力する。例えば、RF部210には、アンテナb0およびb1により受信された無線信号が高周波信号として入力される。RF部210は、入力された高周波信号をフィルタリングし、高周波信号に所定周波数を乗算してダウンコンバージョンすることによりアナログ形式のベースバンド信号への変換を行なう。
【0036】
A/D変換器212Aは、RF部210から入力されるアンテナb0により受信されたパケットのアナログ形式のベースバンド信号をサンプリング、および量子化することにより、デジタル形式のベースバンド信号に変換して出力する。同様に、A/D変換器212Bは、RF部210から入力されるアンテナb1により受信されたパケットのアナログ形式のベースバンド信号をサンプリング、および量子化することにより、デジタル形式のベースバンド信号に変換して出力する。
【0037】
PHY信号処理部220は、A/D変換器212から入力されるデジタル形式のベースバンド信号の復調およびデコードを行い、デコードされたパケットのデータを出力する。なお、PHY信号処理部220の詳細な構成については図6〜図9を参照して後述する。
【0038】
MAC処理部280は、PHY信号処理部220から入力されるデータの誤り検出やフレーム結合などを行なう。また、MAC処理部280は信号生成部282を有し、信号生成部282は送信装置10へ送信するための制御信号を生成する。当該制御信号は、後述するように、送信装置10にパケットの送信間隔を指示する情報が記載される。
【0039】
(送信機能)
PHY信号処理部220は、MAC処理部280から入力されるデータをデジタル形式のベースバンド信号に変換して出力する。なお、PHY信号処理部220は、MIMO(Multiple Input Multiple Output)送信を実現するために、入力されたデータを2系列のデジタル形式のベースバンド信号に変換してもよい。
【0040】
A/D変換器212は、PHY信号処理部220から入力されるデジタル形式のベースバンド信号をアナログ形式のベースバンド信号に変換して出力する。なお、通常送信の場合にはA/D変換器212AまたはA/D変換器212Bのいずれかが利用され、MIMO送信の場合には双方が利用される。
【0041】
RF部210は、A/D変換器212から入力されるアナログ形式のベースバンド信号を高周波信号に変換してアンテナbから無線信号として送信させる。なお、通常送信の場合にはアンテナb0またはb1のいずれかが利用され、MIMO送信の場合には双方が利用される。
【0042】
次に、図6を参照し、PHY信号処理部220の構成をより詳細に説明する。なお、以下では受信時のPHY信号処理部220の機能を説明するが、PHY信号処理部220はパケット送信のための信号処理機能も有する。
【0043】
図6は、PHY信号処理部220の構成を示した機能ブロック図である。図6に示したように、PHY信号処理部220は、フィルタ222Aおよび222Bと、バッファ224Aおよび224Bと、FFT226Aおよび226Bと、チャネル推定部228Aおよび228Bと、IFFT230Aおよび230Bと、を含む。また、PHY信号処理部220は、イコライザ232と、デコーダ234と、位相検出部236と、推定部240と、を含む。
【0044】
フィルタ222Aにはアンテナb0により受信されたパケットのベースバンド信号が入力され、フィルタ222Aは、入力されたベースバンド信号から不要な周波数成分を除去するためのフィルタリングを行なう。同様に、フィルタ222Bにはアンテナb1により受信されたパケットのベースバンド信号が入力され、フィルタ222Bは、入力されたベースバンド信号から不要な周波数成分を除去するためのフィルタリングを行なう。
【0045】
バッファ224Aは、フィルタ222Aによりフィルタリングされたベースバンド信号を一時的に保持し、バッファ224Bは、フィルタ222Bによりフィルタリングされたースバンド信号を一時的に保持する。
【0046】
FFT(Fast Fourier Transform)226Aは、バッファ224Aに保持されているベースバンド信号を、OFDM(Orthogonal Frequency Division Multiplexing)シンボルごとにFFTする。同様に、FFT226Bは、バッファ224Bに保持されているベースバンド信号を、OFDMシンボルごとにFFTする。
【0047】
チャネル推定部228Aは、FFT226Aにより得られたサブキャリアごとの信号成分に基づき、送信装置10およびアンテナb0間を含む伝送路特性をサブキャリアごとに測定する。例えば、チャネル推定部228Aは、パケットのプリアンブル部分に含まれるショートトレーニングシンボルやロングトレーニングシンボルでサブキャリアごとの伝送路特性を測定してもよい。同様に、チャネル推定部228Bは、FFT226Bにより得られたサブキャリアごとの信号成分に基づき、送信装置10およびアンテナb1間を含む伝送路特性をサブキャリアごとに測定する。
【0048】
イコライザ232は、FFT226Aから入力されるサブキャリアごとの信号から、チャネル推定部228Aにより推定された伝送路特性に基づいて伝送路の歪み成分を除去してチャネル等化を行なう。また、イコライザ232は、FFT226Bから入力されるサブキャリアごとの信号から、チャネル推定部228Bにより推定された伝送路特性に基づいて伝送路の歪み成分を除去してチャネル等化を行なう。なお、受信装置20がMIMO受信を行なう場合、イコライザ232はMIMO受信処理を行う。
【0049】
デコーダ234は、イコライザ232によりしてチャネル等化されたサブキャリアごとの信号の復調、およびデコードを行ってパケットの復号データを取得する。そして、デコーダ234はパケットの復号データをMAC処理部280へ出力する。
【0050】
IFFT(Inverse FFT)230Aは、チャネル推定部228Aから入力されるサブキャリアごとの伝送路特性に逆高速フーリエ変換を施すことにより、送信装置10およびアンテナb0間を含む伝送路の時間領域におけるインパルス応答を得る。同様に、IFFT230Bは、チャネル推定部228Bから入力されるサブキャリアごとの伝送路特性に逆高速フーリエ変換を施すことにより、送信装置10およびアンテナb1間を含む伝送路の時間領域におけるインパルス応答を得る。
【0051】
位相検出部236は、IFFT230Aおよび230Bにより得られた伝送路のインパルス応答から、アンテナb0およびb1により受信されたパケットの各々の直接波の位相特性を推定する。図7は、伝送路のインパルス応答の振幅レベルを示した説明図である。図7に示したように、インパルス応答の振幅レベル(│I2+Q2│)は複数の極大値を有する。そのうちで遅延時間が最も小さい最初の極大値が直接波に対応していると考えられる。このため、位相検出部236は、インパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における複素受信特性(I+jQ)を、受信パケットの位相角度を有する信号として検出する。
【0052】
より具体的には、位相検出部236は、IFFT230Aにより得られたインパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における位相特性α0をアンテナb0による受信パケットの位相特性として検出する。同様に、位相検出部236は、IFFT230Bにより得られたインパルス応答の振幅レベルの極大値のうちで遅延時間が最も小さい極大値を検索し、当該極大値における位相特性α1をアンテナb1による受信パケットの位相特性として検出する。
【0053】
推定部240は、位相検出部236により検出されたアンテナb0による受信パケットの位相特性α0およびアンテナb1による受信パケットの位相特性α1から、送信装置10の相対的な移動角度を推定する。なお、本実施形態における移動角度は、アンテナb0およびb1の離隔方向に垂直な軸を回転軸とする角度である。以下、図8を参照し、推定部240の構成について詳細に説明する。
【0054】
図8は、推定部240の構成を示した機能ブロック図である。図8に示したように、推定部240は、複素乗算部242および246と、遅延部244および252と、移動角度推定部248と、加算部250と、を備える。
【0055】
複素乗算部242は、位相α1と位相α0の複素共役とを乗算することにより、パケット1のアンテナ間の位相差β1を算出する位相差算出部として機能する。遅延部244は、複素乗算部242により算出された位相差特性が入力され、入力された位相差特性を遅延して出力する。図8には、遅延部244が複素乗算部242により前回(以前に)算出されたパケット0のアンテナ間の位相差特性β0を遅延して出力している例を示している。
【0056】
複素乗算部246は、パケット1のアンテナ間の位相差特性β1およびパケット0のアンテナ間の位相差特性β0の複素共役とを乗算することにより、パケット間の位相差の差分特性Δβを算出する差分算出部として機能する。
【0057】
移動角度推定部248には、パケット間の位相差の差分特性Δβ、および前回のパケット0の到来角度θ’より、送信装置10の相対的な移動角度Δθ’を推定する。パケット間の位相差の差分特性Δβ、前回のパケット0の到来角度θ’、および移動角度Δθ’は、例えば以下の数式5のように表現される。
【0058】
【数1】
(数式5)
【0059】
移動角度推定部248は、上記の数式5にパケット間の位相差の差分特性Δβ、および前回のパケット0の到来角度θ’を代入することにより、送信装置10の相対的な移動角度Δθ’を推定することができる。なお、移動角度推定部248(関係保持部)は、パケット間の位相差の差分Δβ、前回のパケット0の到来角度θ’、およびキャリア波長λなどの関係を示すテーブルを保持していてもよい。そして、移動角度推定部248は、当該テーブルを参照することにより送信装置10の相対的な移動角度Δθ’を推定してもよい。
【0060】
このようにして移動角度推定部248により推定された移動角度Δθ’は、例えば、受信装置20または受信装置20に接続されるアプリケーション機器(例えばゲーム機器)へのユーザ操作として利用される。
【0061】
また、前回のパケット0の到来角度θ’は、移動角度推定部248により推定された移動角度Δθ’と加算部250により加算され、パケット1の到来角度θ’に更新される。すなわち、加算部250は、これまでの移動角度Δθ’を累積的に加算して到来角度θ’を算出する積分演算部として機能する。当該パケット1の到来角度θ’は遅延部252により遅延して出力され、移動角度推定部248によるパケット2の移動角度Δθ’の推定時に利用される。
【0062】
なお、上記では移動角度Δθ’の推定に際し、数式5に示したように前回のパケット0の到来角度θ’が利用される例を説明したが、本実施形態はかかる例に限定されない。例えば、移動角度Δθ’および到来角度θ’が極めて0に近い場合、x=sinxと近似できることが知られている。したがって、上記数式5を、以下の数式6のように置き換えることにより、移動角度Δθ’の推定に際して前回のパケット0の到来角度θ’を不要とすることも可能である。
【0063】
【数2】
(数式6)
【0064】
また、移動角度Δθ’の推定に際し、数式5に示したように前回のパケット0の到来角度θ’を利用する場合、到来角度θ’の初期値は任意の方法により特定することができる。例えば、移動角度推定部248は、起動時のパケットの到来角度θ’を初期値0と特定してもよいし、ユーザにより所定操作が行なわれたときのパケットの到来角度θ’を初期値0と特定してもよい。
【0065】
このように、本実施形態によれば、アンテナ間の位相差特性β0やβ1に基づいて送信装置10の移動角度を推定することができる。ただし、移動による生じるパケット間の位相差の差分arg(Δβ)が±π(rad)を上回る場合、送信装置10の相対的な移動角度Δθ’を正確に推定することが困難となる。そこで、本実施形態にかかる受信装置20は、パケット間の位相差の差分arg(Δβ)が±π(rad)を上回らないよう、以下に説明する機能を有する。
【0066】
図8に示したように、パケット間のアンテナ位相差の差分特性ΔβはMAC処理部280へ出力される。MAC処理部280の信号生成部282は、パケット間のアンテナ位相差の差分特性Δβの偏角の大きさ|arg(Δβ)|、すなわちパケット間のアンテナ位相差の差分|arg(Δβ)|に基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。そして、送信装置10は、当該制御信号に記載されたパケット送信間隔でパケットを送信する。信号生成部282は、例えば図9に示すパターンに従ってパケット送信間隔を特定してもよい。
【0067】
図9は、パケット間のアンテナ位相差の差分|arg(Δβ)|と送信装置10に対して要求するパケット送信間隔の関係を示した説明図である。パターンAにおいては、パケット間のアンテナ位相差の差分|arg(Δβ)|が所定の閾値thを越えるまでは送信間隔が一定であり、所定の閾値thを越えると送信間隔が短縮される。このため、送信装置10の角移動速度が同一であった場合にもパケット間のアンテナ位相差の差分|arg(Δβ)|が小さくなるため、|arg(Δβ)|が±π(rad)を上回ることを防止することができる。
【0068】
また、パターンBにおいては、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなると送信間隔が段階的に短縮される。ここで、パケット間のアンテナ位相差の差分|arg(Δβ)|が0である場合、送信装置10は移動していないため、|arg(Δβ)|が±πを上回る可能性は低いと考えられる。そこで、パターンBに示したように、パケット間のアンテナ位相差の差分|arg(Δβ)|が0である場合には、設定範囲内で最大の送信間隔を適用することにより、送信装置10から不要に多量のパケットが送信されてしまう場合を防止できる。
【0069】
また、パターンCに示したように、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなるにつれて送信間隔が連続的に短縮されるようにしてもよい。より詳細には、パターンCには、パケット間のアンテナ位相差の差分|arg(Δβ)|が大きくなるほど、送信間隔の短縮時間が少なくなる例を示している。このパターンCにおいても、送信装置10から不要に多量のパケットが送信されてしまう場合、およびパケット間のアンテナ位相差の差分arg(Δβ)が±π(rad)を上回ってしまう場合を防止することができる。
【0070】
なお、上記ではパケット間のアンテナ位相差の差分|arg(Δβ)|に応じて送信装置10に動的にパケットの送信間隔を変化させる例を説明したが、本実施形態はかかる例に限定されない。例えば、送信装置10は、常に、想定される送信装置10の最大の角移動速度においてもアンテナ位相差の差分|arg(Δβ)|が±π(rad)を上回らない送信間隔でパケットを送信してもよい。
【0071】
また、上記では受信装置20が具体的なパケットの送信間隔を送信装置10に指示する例を説明したが、本実施形態はかかる例に限定されない。例えば、受信装置20は、単にパケットの送信間隔を短くするよう指示する制御信号を送信しても、長くするよう指示する制御信号を送信してもよい。
【0072】
また、上記では受信装置20がパケットの送信間隔を送信装置10に指示する例を説明したが、本実施形態はかかる例に限定されない。例えば、受信装置20はパケット間のアンテナ位相差の差分|arg(Δβ)|を記載した制御信号を送信装置10へ送信し、送信装置10においてパケット間のアンテナ位相差の差分|arg(Δβ)|に対応する送信間隔を特定してもよい。
【0073】
[1.3 第1の実施形態にかかる受信装置の動作]
以上、図5〜図9を参照して本実施形態にかかる受信装置20の構成を説明した。続いて、図10を参照し、本実施形態にかかる受信装置20において実行される移動角度推定方法について説明する。
【0074】
図10は、第1の実施形態にかかる受信装置20において実行される移動角度推定方法の流れを示したフローチャートである。図10に示したように、送信装置10から送信された新たなパケットがアンテナb0およびb1により受信されると(S304)、位相検出部236がアンテナb0およびb1により受信されたパケットの位相を検出する(S308)。
【0075】
そして、推定部240の複素乗算部242が、アンテナb0およびb1により受信されたパケットの位相差を算出し(S312)、当該位相差と前回のパケットの位相差との差分を複素乗算部246が算出する(S316)。さらに、複素乗算部246により算出されたパケット間のアンテナ位相差の差分に基づき、移動角度推定部248が送信装置10の移動角度を推定する(S320)。
【0076】
一方、MAC処理部280の信号生成部282は、複素乗算部246により算出されたパケット間のアンテナ位相差の差分に応じて送信装置10に要求するパケットの送信間隔を特定し、当該送信間隔が記載された制御信号を生成する。信号生成部282により生成されたこの制御信号は、PHY信号処理部220、A/D変換器212Aおよび210B、RF部210、アンテナb0およびb1を介して送信装置10へ送信される(S324)。その後、S304からの処理が繰り返される。
【0077】
<2.第2の実施形態>
以上説明した第1の実施形態では、受信装置20に2つのアンテナb0およびb1が設けられていた。しかし、受信装置20に設けられるアンテナの数は2つに限定されない。例えば、以下に説明する第2の実施形態にかかる受信装置20’のように、設けられるアンテナの数は3つであってもよい。
【0078】
図11は、本発明の第2の実施形態にかかる受信装置20’におけるアンテナの配置例を示した説明図である。図11に示したように、第2の実施形態にかかる受信装置20’には、アンテナb1がアンテナb0とy方向に距離dyだけ離隔して配置され、アンテナb2がアンテナb0とz方向に距離dzだけ離隔して配置されている。なお、図11においては、複数のアンテナの間隔を模式的に示しているにすぎず、複数のアンテナは実際には図11に示したより近接していてもよい。
【0079】
かかる構成によれば、第2の実施形態にかかる受信装置20’は、y方向に離隔して配置されているアンテナb1およびアンテナb0による受信パケットの位相差に基づき、送信装置10のz軸を回転軸とする移動角度を推定することができる。さらに、第2の実施形態にかかる受信装置20’は、z方向に離隔して配置されているアンテナb2およびアンテナb0による受信パケットの位相差に基づき、送信装置10のy軸を回転軸とする移動角度を推定することができる。以下、図12を参照して上記移動角度の推定を実現するための構成について説明する。
【0080】
図12は、第2の実施形態にかかる受信装置20’の推定部240’の構成を示した機能ブロック図である。図12に示したように、推定部240’は、複素乗算部242、246、262および266と、遅延部244、252、264および272と、移動角度推定部248および268と、加算部250および270と、を備える。
【0081】
複素乗算部242は、アンテナb1による受信パケットの位相特性α1とアンテナb0による受信パケットの位相特性α0の複素共役とを乗算することにより、パケット1のアンテナb0およびb1間の位相差特性β1を算出する。遅延部244は、複素乗算部242により算出された位相差が入力され、入力された位相差を遅延して出力する。図12には、遅延部244が複素乗算部242により前回(以前に)算出されたパケット0のアンテナ間の位相差β0を遅延して出力している例を示している。
【0082】
複素乗算部246は、パケット1のアンテナ間の位相差β1およびパケット0のアンテナ間の位相差特性β0の複素共役とを乗算することにより、パケット間のアンテナ位相差の差分特性Δβzを算出する。
【0083】
移動角度推定部248には、パケット間のアンテナ位相差の差分特性Δβz、および前回のパケット0の到来角度θz’より、送信装置10の移動角度Δθz’を推定する。なお、到来角度θz’および移動角度Δθz’は、図11に示したz軸を回転軸とする角度である。
【0084】
また、前回のパケット0の到来角度θz’は、移動角度推定部248により推定された移動角度Δθz’と加算部250により加算され、パケット1の到来角度θz’に更新される。当該パケット1の到来角度θz’は遅延部252により遅延して出力され、移動角度推定部248によるパケット2の移動角度Δθz’の推定時に利用される。
【0085】
同様に、複素乗算部262は、アンテナb2による受信パケットの位相特性α2とアンテナb0による受信パケットの位相特性α0の複素共役とを乗算することにより、パケット1のアンテナb0およびb2間の位相差特性γ1を算出する。遅延部264は、複素乗算部262により算出された位相差が入力され、入力された位相差を遅延して出力する。図12には、遅延部264が複素乗算部262により前回(以前に)算出されたパケット0のアンテナ間の位相差特性γ0を遅延して出力している例を示している。
【0086】
複素乗算部266は、パケット1のアンテナ間の位相差特性γ1およびパケット0のアンテナ間の位相差特性γ0の複素共役とを乗算することにより、パケット間のアンテナ位相差の差分特性Δγyを算出する。
【0087】
移動角度推定部268には、パケット間のアンテナ位相差の差分特性Δγy、および前回のパケット0の到来角度θy’より、送信装置10の移動角度Δθy’を推定する。なお、到来角度θy’および移動角度Δθy’は、図11に示したy軸を回転軸とする角度である。
【0088】
また、前回のパケット0の到来角度θy’は、移動角度推定部268により推定された移動角度Δθy’と加算部270により加算され、パケット1の到来角度θy’に更新される。当該パケット1の到来角度θy’は遅延部272により遅延して出力され、移動角度推定部268によるパケット2の移動角度Δθy’の推定時に利用される。
【0089】
また、図12に示したように、パケット間のアンテナ位相差の差分特性ΔβzおよびΔ特性γyはMAC処理部280へ出力される。MAC処理部280の信号生成部282は、パケット間のアンテナ位相差の差分特性ΔβzおよびΔγyの偏角の大きさに基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。
【0090】
例えば、第2の実施形態においては、信号生成部282は、パケット間のアンテナ位相差の差分特性ΔβzおよびΔγyの双方について対応する送信間隔を特定し、送信装置10に要求する送信間隔を短い方の送信間隔に決定してもよい。かかる構成により、パケット間のアンテナ位相差の差分特性ΔβzまたはΔγyの偏角が±π(rad)を上回ってしまう場合を防止し、送信装置10の複数方向の移動角度を高精度に推定することが可能となる。
【0091】
<3.まとめ、および補足>
以上説明したように、本実施形態によれば、アンテナ間の距離とキャリア波長の関係にかかわらず、送信装置10の移動角度を検出することができる。したがって、アンテナの配置の自由度を高めることができる。さらに、本実施形態によれば、アンテナ間隔を大きくできるため、送信装置10の移動角度や到来角度の検出精度の向上が期待される。また、アンテナ間のキャリブレーションも不要である。
【0092】
さらに、本実施形態によれば、信号生成部282が、パケット間のアンテナ位相差の差分の大きさに基づき、送信装置10に対して要求するパケット送信間隔を特定し、当該パケット送信間隔が記載された制御信号を生成する。かかる構成により、送信装置10から不要に多量のパケットが送信されてしまう場合、およびパケット間のアンテナ位相差の差分が±π(rad)を上回ってしまう場合を防止することができる。
【0093】
なお、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は係る例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例または修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0094】
例えば、本明細書の受信装置20の処理における各ステップは、必ずしもフローチャートとして記載された順序に沿って時系列に処理する必要はない。例えば、受信装置20の処理における各ステップは、並列的あるいは個別に実行される処理(例えば、並列処理あるいはオブジェクトによる処理)を含んでもよい。
【0095】
また、上記実施形態では、1つの信号源からパケットを送信する送信装置10の移動角度を推定する例を説明したが、本発明はかかる例に限定されない。例えば、複数の信号源からパケットをMIMO送信するMIMOトランシーバにも本発明を適用することが可能である。この場合、受信装置20は、複数の信号源に対する到来角度や移動角度を検出することができるため、MIMOトランシーバの向きの変化、およびMIMOトランシーバの向きそのものを検出することも可能である。
【0096】
また、受信装置20に内蔵されるCPU、ROMおよびRAMなどのハードウェアを、上述した受信装置20の各構成と同等の機能を発揮させるためのコンピュータプログラムも作成可能である。また、該コンピュータプログラムを記憶させた記憶媒体も提供される。また、図6および図8の機能ブロック図で示したそれぞれの機能ブロックをハードウェアで構成することで、一連の処理をハードウェアで実現することもできる。
【図面の簡単な説明】
【0097】
【図1】本発明の第1の実施形態にかかる無線通信システムの全体構成を示した説明図である。
【図2】複数のアンテナとパケットの到来角度の関係を示した説明図である。
【図3】位相差arg(β)とパケットの到来角度の関係を示した説明図である。
【図4】本実施形態の要旨を示した説明図である。
【図5】本発明の第1の実施形態にかかる受信装置の構成を示した機能ブロック図である。
【図6】PHY信号処理部の構成を示した機能ブロック図である。
【図7】伝送路のインパルス応答の振幅レベルを示した説明図である。
【図8】推定部の構成を示した機能ブロック図である。
【図9】パケット間のアンテナ位相差の差分と送信装置に対して要求するパケット送信間隔の関係を示した説明図である。
【図10】第1の実施形態にかかる受信装置において実行される移動角度推定方法の流れを示したフローチャートである。
【図11】本発明の第2の実施形態にかかる受信装置におけるアンテナの配置例を示した説明図である。
【図12】第2の実施形態にかかる受信装置の推定部の構成を示した機能ブロック図である。
【符号の説明】
【0098】
10 送信装置
20 受信装置
210 RF部
220 PHY信号処理部
228 チャネル推定部
230 IFFT
236 位相検出部
240 推定部
242、246、262、266 複素乗算部
248、268 移動角度推定部
250、270 加算部
280 MAC処理部
282 信号生成部
【特許請求の範囲】
【請求項1】
複数のアンテナと;
前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と;
前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と;
前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と;
を備える、受信装置。
【請求項2】
前記差分算出部により算出された位相差の差分が閾値を上回った場合、前記送信装置に信号の送信間隔を短縮させる制御信号を生成する信号生成部をさらに備える、請求項1に記載の受信装置。
【請求項3】
前記信号生成部は、前記差分算出部により算出された位相差の差分が0である場合、前記送信装置に信号の送信間隔を設定範囲内で最大にさせる制御信号を生成する、請求項2に記載の受信装置。
【請求項4】
前記受信装置は、
前記複数のアンテナによる受信信号ごとに、前記送信装置および前記アンテナの間の伝送路のインパルス応答の極大値のうちで遅延時間が最も小さい極大値における位相を検出する位相検出部をさらに備え、
前記位相差算出部は、前記位相検出部により検出された前記複数のアンテナによる受信信号ごとの位相の差分を算出する、請求項3に記載の受信装置。
【請求項5】
前記受信装置は、前記差分算出部により算出された位相差の差分、前記受信信号の波長、および前記送信装置の移動角度の関係を保持している関係保持部をさらに備え、
前記移動角推定部は、前記関係保持部に保持されている関係、前記差分算出部により算出された位相差の差分、および前記受信信号の波長から前記送信装置の移動角度を推定する、請求項4に記載の受信装置。
【請求項6】
前記移動角推定部により推定された前記送信装置の移動角度を積分する積分演算部をさらに備える、請求項5に記載の受信装置。
【請求項7】
前記差分算出部により算出された位相差の差分の大きさに応じ、前記送信装置に信号の送信間隔を動的に変化させる制御信号を生成する信号生成部をさらに備える、請求項1に記載の受信装置。
【請求項8】
複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと:
算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと;
受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと;
を含む、移動角度推定方法。
【請求項9】
コンピュータに、
複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと:
算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと;
受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと;
を実行させるための、プログラム。
【請求項10】
送信装置と;
複数のアンテナ、
前記複数のアンテナ間での前記送信装置からの受信信号の位相差を算出する位相差算出部、
前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部、および、
前記差分算出部により算出された位相差の差分から前記送信装置の移動角度を推定する移動角推定部、
を有する受信装置と;
を備える、無線通信システム。
【請求項1】
複数のアンテナと;
前記複数のアンテナ間での受信信号の位相差を算出する位相差算出部と;
前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部と;
前記差分算出部により算出された位相差の差分から送信装置の移動角度を推定する移動角推定部と;
を備える、受信装置。
【請求項2】
前記差分算出部により算出された位相差の差分が閾値を上回った場合、前記送信装置に信号の送信間隔を短縮させる制御信号を生成する信号生成部をさらに備える、請求項1に記載の受信装置。
【請求項3】
前記信号生成部は、前記差分算出部により算出された位相差の差分が0である場合、前記送信装置に信号の送信間隔を設定範囲内で最大にさせる制御信号を生成する、請求項2に記載の受信装置。
【請求項4】
前記受信装置は、
前記複数のアンテナによる受信信号ごとに、前記送信装置および前記アンテナの間の伝送路のインパルス応答の極大値のうちで遅延時間が最も小さい極大値における位相を検出する位相検出部をさらに備え、
前記位相差算出部は、前記位相検出部により検出された前記複数のアンテナによる受信信号ごとの位相の差分を算出する、請求項3に記載の受信装置。
【請求項5】
前記受信装置は、前記差分算出部により算出された位相差の差分、前記受信信号の波長、および前記送信装置の移動角度の関係を保持している関係保持部をさらに備え、
前記移動角推定部は、前記関係保持部に保持されている関係、前記差分算出部により算出された位相差の差分、および前記受信信号の波長から前記送信装置の移動角度を推定する、請求項4に記載の受信装置。
【請求項6】
前記移動角推定部により推定された前記送信装置の移動角度を積分する積分演算部をさらに備える、請求項5に記載の受信装置。
【請求項7】
前記差分算出部により算出された位相差の差分の大きさに応じ、前記送信装置に信号の送信間隔を動的に変化させる制御信号を生成する信号生成部をさらに備える、請求項1に記載の受信装置。
【請求項8】
複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと:
算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと;
受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと;
を含む、移動角度推定方法。
【請求項9】
コンピュータに、
複数のアンテナにより受信された受信信号の各々の位相差を算出するステップと:
算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出するステップと;
受信信号の位相差、および新たな受信信号の位相差の差分から送信装置の移動角度を推定するステップと;
を実行させるための、プログラム。
【請求項10】
送信装置と;
複数のアンテナ、
前記複数のアンテナ間での前記送信装置からの受信信号の位相差を算出する位相差算出部、
前記位相差算出部により算出された以前の受信信号の位相差、および新たな受信信号の位相差の差分を算出する差分算出部、および、
前記差分算出部により算出された位相差の差分から前記送信装置の移動角度を推定する移動角推定部、
を有する受信装置と;
を備える、無線通信システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2010−96646(P2010−96646A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−268137(P2008−268137)
【出願日】平成20年10月17日(2008.10.17)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月17日(2008.10.17)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]