
受信装置
【課題】受信信号の解析の信頼性を向上する。
【解決手段】受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
【解決手段】受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、航空機から送信される信号を受信する受信装置に関する。
【背景技術】
【0002】
航空機の飛行の監視には、航空機に搭載されるモードS対応トランスポンダとの間でモードS信号の送受信を行うモードS二次監視レーダ装置(SSRモードS)が利用されている。また、航空機同士の衝突を防止には、航空機同士で位置情報(拡張スキッタ)を交換する放送型自動従属監視(ADS−B:Automatic Dependent Surveillance-Broadcast)も利用されている。
【0003】
近年では、航空機から送信されたモードS信号や拡張スキッタ信号を地上の受信装置で受信し、信号を送信した航空機の位置を特定するマルチラテレーションシステム(MLAT:Multi Lateration System)の利用が広まりつつある。具体的には、マルチラテレーションシステムは、複数の受信局における同一の信号の受信時刻の差を利用して、航空機の位置を測位し、測位した航空機位置を利用して航空機の識別情報や高度情報を含む応答信号を取得するシステムもある。また、このマルチラテレーションシステムをより広域で利用する広域マルチラテレーションシステム(WAM:Wide Area Multilateration)も利用されることがある。さらに、地上で航空機から送信される拡張スキッタを受信して航空機の位置情報を利用するADS−B受信装置もある。
【0004】
マルチラテレーションシステムや広域マルチラテレーションシステムの受信装置、又はADS−B受信装置等の受動型の受信装置は、無指向性のアンテナを使用するのが一般的であるため、受信装置では、全方位から送信された信号を常時受信することになる。また、受信装置は、レーダ装置の送受信周期とも非同期であって、STC(sensitivity time control)処理のような受信感度調整もできないため、様々なレベルの信号を受信する。さらに、受信装置は、干渉やマルチパス等の影響を受けた信号を受信することもある。
【0005】
上述したように、受動型の受信装置では、様々な信号を受信するが、これらの様々な信号からモードS信号や拡張スキッタを検出し、正確に解析することは困難である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−188853号公報
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7.
【発明の概要】
【発明が解決しようとする課題】
【0008】
したがって本発明は、航空機から送信されて受信した信号の解析の信頼性を向上した受信装置を提供する。
【課題を解決するための手段】
【0009】
本発明の実施形態に係る受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
【図面の簡単な説明】
【0010】
【図1】実施形態に係る受信装置を備えるマルチラテレーションシステムを説明する概略図である。
【図2】実施形態に係る受信装置を説明するブロック図である。
【図3】図2の受信装置における信号の二値化処理を説明するタイミングチャートである。
【発明を実施するための形態】
【0011】
以下に、図面を用いて実施形態に係る受信装置について説明する。この受信装置は、航空機から送信された所定形式の信号を受信する受動型の受信装置である。所定形式の信号とは、モードS応答のプリアンブルを含む信号である。モードS応答のプリアンブルとは、パルス幅が500nsの4のパルスから成り、第1パルスと第2パルスとの間隔が1μsであり、第1パルスと第3パルスとの間隔が3.5μsであり、第1パルスと第3パルスとの間隔が1μsである。なお、モードS応答のデータブロックのデータ長は56ビット又は112ビットで、データブロックは、プリアンブルの第1パルスから8μsで開始するとともに、マンチェスタコードを利用し各パルス幅が500nsになるように規定されている。また、拡張スキッタのプリアンブルもモードS応答のプリアンブルと同一のパルスパターンであって、拡張スキッタのデータブロックは、プリアンブルの第1パルスから8μsで開始するとともに、データ長は112ビットであって、マンチェスタコードを利用し各パルス幅が500nsになるように規定されている。
【0012】
ここでは、受信装置の一例として、マルチラテレーションシステムに利用する受信装置について説明するが、同一のプリアンブルを含む信号を受信する装置であればよい。例えば、マルチラテレーションシステムに利用される受信装置の他、広域マルチラテレーションシステムに利用される受信装置や、ADS−B受信装置であってもよい。
【0013】
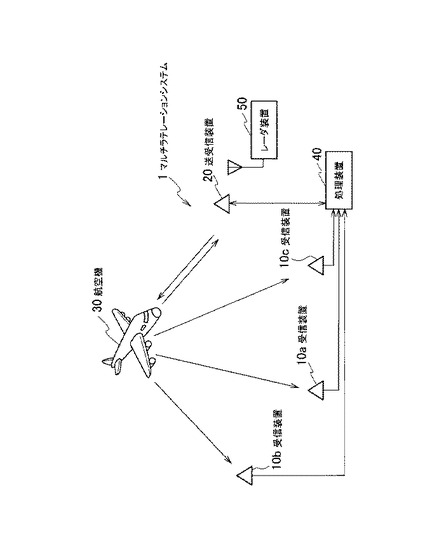
図1に示すように、実施形態に係るマルチラテレーションシステム1は、航空機30から送信される信号(モードS応答(DF=4,5,11,20,21)、拡張スキッタ(DF=17,18))を受信する複数の受信装置10a〜10cと、航空機30から送信される信号(DF=4,5,11,17,18,20,21)を受信するとともに、航空機30に信号(UF=4,5)を送信する送受信装置20と、受信装置10a〜10c及び送受信装置20が受信した信号とともに信号の受信時刻を入力して航空機30の位置を測位する処理装置40とが接続されている。
【0014】
マルチラテレーションシステム1では、異なる場所に設置される受信装置10a〜10c及び送受信装置20は、航空機30のトランスポンダから送信される信号を受信すると、受信した信号に信号の受信時刻を関連づけて処理装置40に出力する。処理装置40は、同一の信号についての各装置10a〜10c,20における受信時刻の差から、航空機30の位置を測位する。ここで、受信装置10a〜10c及び送受信装置20でそれぞれ信号に関連づける受信時刻が正確でない場合、測位される航空機30の位置も正確に測位できないため、受信装置10a〜10c及び送受信装置20は時刻を同期させている。
【0015】
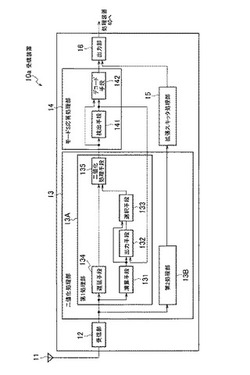
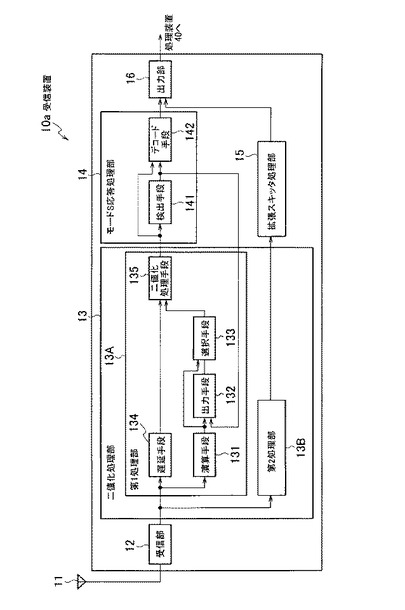
受信装置10aは、図2に示すように、アンテナ11が受信した信号を入力する受信部12と、受信部12が入力した信号を二値化処理する二値化処理部13と、二値化された信号のうちモードS応答を解析するモードS応答処理部14と、二値化された信号のうち拡張スキッタを解析する拡張スキッタ処理部15と、モードS応答処理部14の解析結果及び拡張スキッタ処理部15の解析結果を処理装置40へ出力する出力部16を備えている。
【0016】
モードS応答とは、航空機30がレーダ装置50から入力したモードS質問に応答して送信され、レーダ装置50において航空機30の監視に利用する信号である。1拡張スキッタとは、拡張スキッタの送信機能を有する航空機30が定期的に送信する信号である。モードS応答は、所定のパルスパターンのプリアンブルとデータが含まれるデータブロックで構成されている。
【0017】
具体的には、二値化処理部13は、図2に示すように、モードS応答に対応した二値化処理を実行する第1処理部13Aと、拡張スキッタに対応した二値化処理を実行する第2処理部13Bとを備えている。第1処理部13Aで二値化された受信信号はモードS応答処理部14に出力され、第2処理部13Bで二値化された受信信号は拡張スキッタ処理部15に出力される。
【0018】
図2に示すように、第1処理部13Aは、受信部12で受信した信号(LOGビデオの信号)を利用して受信信号の第1閾値を求める演算手段131と、モードS応答処理部14における処理結果を利用して受信信号の第2閾値及びリセット信号を出力する出力手段132と、演算手段131から出力される第1閾値と出力手段132から出力される第2閾値から使用する閾値を選択する選択手段133と、受信信号を遅延させる遅延手段134と、遅延手段134から出力される受信信号を選択手段133で選択された閾値を利用して二値化する二値化処理手段135とを備えている。
【0019】
演算手段131は、受信部12から受信信号を入力すると、受信信号の信号レベルのピーク値を特定し、この信号レベルのピーク値を利用して求めた第1閾値を出力する。例えば、演算手段131は、ピーク値から−6dBの値を第1閾値として求める。
【0020】
出力手段132は、第1閾値を入力してメモリ(図示せず)に記憶する。その後、モードS応答処理部14からモードS応答のプリアンブルの検出有を特定する信号を入力すると、モードS応答のプリアンブル部分から求めた第1閾値を第2閾値として出力するとともに、第2閾値の利用の開始を促がす開始信号を出力する。また、出力手段132は、モードS応答処理部14でプリアンブル検出からプリアンブルに続くデータブロックの処理が終了する信号を入力すると、第2閾値の利用を終了させるリセット信号を出力する。
【0021】
選択手段133は、演算手段131から入力する第1閾値を出力しているが、出力手段132から開始信号を入力後、リセット信号を入力するまでの期間は、出力手段132から入力する第2閾値を選択して出力する。すなわち、選択手段133は、第1閾値を出力するとともに、受信信号からモードS応答のプリアンブルが検出されてから所定期間(データブロックの処理期間)は、第1閾値に代えてプリアンブルのピーク値を用いて決定された第2閾値を二値化処理に使用する閾値として選択する。
【0022】
遅延手段134は、演算手段131、出力手段132及び選択手段133の処理に合わせて受信信号を出力する。
【0023】
二値化処理手段135は、遅延手段134から入力する受信信号を、選択手段133で選択された閾値を利用して二値化処理し、受信信号の二値化データを出力する。
【0024】
また、図示を用いた説明は省略するが、第2処理部13Bにおいても、第1処理部13Aと同様に、演算手段、出力手段、選択手段、遅延手段及び二値化処理手段を備えており、拡張スキッタを二値化処理して出力する。
【0025】
ここで、第1処理部13AにおいてはモードS応答に対応する受信信号が処理され、第2処理部13Bにおいては拡張スキッタに対応する受信信号が処理されるため、第1処理部13Aから出力される二値化データと、第2処理部13Bから出力される二値化データとは異なるデータとなる。
【0026】
図2に示すように、モードS応答処理部14は、受信信号の二値化データからモードS応答のプリアンブルを検出する検出手段141と、プリアンブルが検出されると二値化データからモードS応答をデコードするデコード手段142とを備えている。
【0027】
検出手段141は、二値化処理部13で処理された二値化データを入力し、二値化データから、モードS応答のプリアンブルに規定される所定のパルスパターンの有無を検出する。また、検出手段141は、二値化データに所定のパルスパターンがあるとき、プリアンブルの検出有を特定する信号を出力する。また、検出手段141は、モードS応答のデコードが終了するタイミングで、データブロックの処理の終了を特定する信号を出力する。
【0028】
デコード手段142は、二値化処理部13で処理された二値化データを入力するとともに、検出手段141からモードS応答のプリアンブルの検出の有無に関する信号を入力する。デコード手段142は、プリアンブルの検出有の信号を入力すると、二値化データ(データブロック)をデコードし、デコード結果(データビット及び信頼性ビット)を出力する。
【0029】
また、図示を用いた説明は省略するが、拡張スキッタ処理部15においても、モードS応答処理部14と同様に、検出手段及びデコード手段を備えており、二値化データから拡張スキッタのデータブロックをデコードして出力する。
【0030】
モードS応答処理部14から出力されるモードS応答のデコード結果及び拡張スキッタ処理部15から出力される拡張スキッタのデコード結果は、処理装置40に収集され、航空機30の位置の測位に利用される。
【0031】
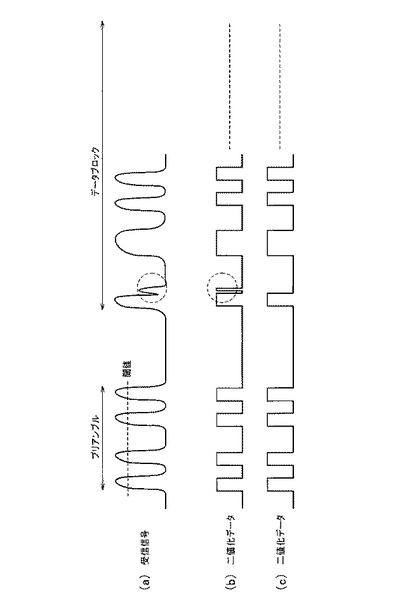
図3を用いて、受信装置10aで受信信号を二値化する一例について説明する。図3(a)に示すようなマルチパスやノイズによる歪みが存在する信号を受信したとする。この場合、演算手段131でそれぞれのパルスを各パルスのピーク値から求められた第1閾値を利用して二値化処理すると、図3(b)に示すように、歪みの部分も有効な信号として二値化処理され、ヒゲのある二値化データが得られることになる。これに対し、実施形態に係る受信装置10aでは、プリアンブルが検出された場合、プリアンブルのピーク値から求められた第2閾値を利用してデータブロックを二値化処理する。したがって、図3(c)に示すように、歪みの部分は有効な信号とされずに二値化処理され、二値化処理の精度が向上する。
【0032】
各航空機30から送信される信号の信号レベルは一定であるが、各航空機30と受信装置10aの距離によって、受信装置10aで受信される際の信号の信号レベルが異なる。すなわち、航空機30と受信装置10aの距離が短いときには信号レベルは大きいが、距離が長くなるにつれ、信号レベルも小さくなる。したがって、航空機30から送信されたモードS応答や拡張スキッタでは、プリアンブルを構成する各パルスの信号レベルとデータブロックを構成する各パルスの信号レベルとは略同一であるため、プリアンブルの信号レベルをデータブロックの二値化に利用することで、データブロックにマルチパスやノイズによる歪み等が含まれていても、これらに影響されずに二値化することができる。実施形態に係る受信装置10aでは、このような特徴を利用し、プリアンブルから求めた閾値を利用して二値化処理を実行する。
【0033】
上述したように、実施形態に係る受信装置10aにおいて、プリアンブルから求めた閾値を利用して信号を二値化することで、受信信号の解析の信頼性を向上することができる。
【0034】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0035】
1…マルチラテレーションシステム
10a〜10c…受信装置
11…アンテナ
12…受信部
13…二値化処理部
13A…第1処理部
131…演算手段
132…出力手段
133…選択手段
134…遅延手段
135…二値化処理手段
13B…第2処理部
14…モードS応答処理部
141…検出手段
142…デコード手段
15…拡張スキッタ処理部
16…出力部
20…送受信装置
30…航空機
40…処理装置
50…レーダ装置
【技術分野】
【0001】
本発明の実施形態は、航空機から送信される信号を受信する受信装置に関する。
【背景技術】
【0002】
航空機の飛行の監視には、航空機に搭載されるモードS対応トランスポンダとの間でモードS信号の送受信を行うモードS二次監視レーダ装置(SSRモードS)が利用されている。また、航空機同士の衝突を防止には、航空機同士で位置情報(拡張スキッタ)を交換する放送型自動従属監視(ADS−B:Automatic Dependent Surveillance-Broadcast)も利用されている。
【0003】
近年では、航空機から送信されたモードS信号や拡張スキッタ信号を地上の受信装置で受信し、信号を送信した航空機の位置を特定するマルチラテレーションシステム(MLAT:Multi Lateration System)の利用が広まりつつある。具体的には、マルチラテレーションシステムは、複数の受信局における同一の信号の受信時刻の差を利用して、航空機の位置を測位し、測位した航空機位置を利用して航空機の識別情報や高度情報を含む応答信号を取得するシステムもある。また、このマルチラテレーションシステムをより広域で利用する広域マルチラテレーションシステム(WAM:Wide Area Multilateration)も利用されることがある。さらに、地上で航空機から送信される拡張スキッタを受信して航空機の位置情報を利用するADS−B受信装置もある。
【0004】
マルチラテレーションシステムや広域マルチラテレーションシステムの受信装置、又はADS−B受信装置等の受動型の受信装置は、無指向性のアンテナを使用するのが一般的であるため、受信装置では、全方位から送信された信号を常時受信することになる。また、受信装置は、レーダ装置の送受信周期とも非同期であって、STC(sensitivity time control)処理のような受信感度調整もできないため、様々なレベルの信号を受信する。さらに、受信装置は、干渉やマルチパス等の影響を受けた信号を受信することもある。
【0005】
上述したように、受動型の受信装置では、様々な信号を受信するが、これらの様々な信号からモードS信号や拡張スキッタを検出し、正確に解析することは困難である。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2005−188853号公報
【非特許文献】
【0007】
【非特許文献1】Michael C. Stevens “Secondary Surveillance Radar” 1988, ISBN 0-89006-292-7.
【発明の概要】
【発明が解決しようとする課題】
【0008】
したがって本発明は、航空機から送信されて受信した信号の解析の信頼性を向上した受信装置を提供する。
【課題を解決するための手段】
【0009】
本発明の実施形態に係る受信装置は、演算手段と、選択手段と、二値化処理手段とを備える。演算手段は、受信信号のピーク値を用いて当該受信信号の第1閾値を求める。選択手段は、演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えてパルスパターンのピーク値を用いて求められた第2閾値を選択して出力する。二値化処理手段は、選択手段から出力される閾値を利用して、受信信号を二値化する。
【図面の簡単な説明】
【0010】
【図1】実施形態に係る受信装置を備えるマルチラテレーションシステムを説明する概略図である。
【図2】実施形態に係る受信装置を説明するブロック図である。
【図3】図2の受信装置における信号の二値化処理を説明するタイミングチャートである。
【発明を実施するための形態】
【0011】
以下に、図面を用いて実施形態に係る受信装置について説明する。この受信装置は、航空機から送信された所定形式の信号を受信する受動型の受信装置である。所定形式の信号とは、モードS応答のプリアンブルを含む信号である。モードS応答のプリアンブルとは、パルス幅が500nsの4のパルスから成り、第1パルスと第2パルスとの間隔が1μsであり、第1パルスと第3パルスとの間隔が3.5μsであり、第1パルスと第3パルスとの間隔が1μsである。なお、モードS応答のデータブロックのデータ長は56ビット又は112ビットで、データブロックは、プリアンブルの第1パルスから8μsで開始するとともに、マンチェスタコードを利用し各パルス幅が500nsになるように規定されている。また、拡張スキッタのプリアンブルもモードS応答のプリアンブルと同一のパルスパターンであって、拡張スキッタのデータブロックは、プリアンブルの第1パルスから8μsで開始するとともに、データ長は112ビットであって、マンチェスタコードを利用し各パルス幅が500nsになるように規定されている。
【0012】
ここでは、受信装置の一例として、マルチラテレーションシステムに利用する受信装置について説明するが、同一のプリアンブルを含む信号を受信する装置であればよい。例えば、マルチラテレーションシステムに利用される受信装置の他、広域マルチラテレーションシステムに利用される受信装置や、ADS−B受信装置であってもよい。
【0013】
図1に示すように、実施形態に係るマルチラテレーションシステム1は、航空機30から送信される信号(モードS応答(DF=4,5,11,20,21)、拡張スキッタ(DF=17,18))を受信する複数の受信装置10a〜10cと、航空機30から送信される信号(DF=4,5,11,17,18,20,21)を受信するとともに、航空機30に信号(UF=4,5)を送信する送受信装置20と、受信装置10a〜10c及び送受信装置20が受信した信号とともに信号の受信時刻を入力して航空機30の位置を測位する処理装置40とが接続されている。
【0014】
マルチラテレーションシステム1では、異なる場所に設置される受信装置10a〜10c及び送受信装置20は、航空機30のトランスポンダから送信される信号を受信すると、受信した信号に信号の受信時刻を関連づけて処理装置40に出力する。処理装置40は、同一の信号についての各装置10a〜10c,20における受信時刻の差から、航空機30の位置を測位する。ここで、受信装置10a〜10c及び送受信装置20でそれぞれ信号に関連づける受信時刻が正確でない場合、測位される航空機30の位置も正確に測位できないため、受信装置10a〜10c及び送受信装置20は時刻を同期させている。
【0015】
受信装置10aは、図2に示すように、アンテナ11が受信した信号を入力する受信部12と、受信部12が入力した信号を二値化処理する二値化処理部13と、二値化された信号のうちモードS応答を解析するモードS応答処理部14と、二値化された信号のうち拡張スキッタを解析する拡張スキッタ処理部15と、モードS応答処理部14の解析結果及び拡張スキッタ処理部15の解析結果を処理装置40へ出力する出力部16を備えている。
【0016】
モードS応答とは、航空機30がレーダ装置50から入力したモードS質問に応答して送信され、レーダ装置50において航空機30の監視に利用する信号である。1拡張スキッタとは、拡張スキッタの送信機能を有する航空機30が定期的に送信する信号である。モードS応答は、所定のパルスパターンのプリアンブルとデータが含まれるデータブロックで構成されている。
【0017】
具体的には、二値化処理部13は、図2に示すように、モードS応答に対応した二値化処理を実行する第1処理部13Aと、拡張スキッタに対応した二値化処理を実行する第2処理部13Bとを備えている。第1処理部13Aで二値化された受信信号はモードS応答処理部14に出力され、第2処理部13Bで二値化された受信信号は拡張スキッタ処理部15に出力される。
【0018】
図2に示すように、第1処理部13Aは、受信部12で受信した信号(LOGビデオの信号)を利用して受信信号の第1閾値を求める演算手段131と、モードS応答処理部14における処理結果を利用して受信信号の第2閾値及びリセット信号を出力する出力手段132と、演算手段131から出力される第1閾値と出力手段132から出力される第2閾値から使用する閾値を選択する選択手段133と、受信信号を遅延させる遅延手段134と、遅延手段134から出力される受信信号を選択手段133で選択された閾値を利用して二値化する二値化処理手段135とを備えている。
【0019】
演算手段131は、受信部12から受信信号を入力すると、受信信号の信号レベルのピーク値を特定し、この信号レベルのピーク値を利用して求めた第1閾値を出力する。例えば、演算手段131は、ピーク値から−6dBの値を第1閾値として求める。
【0020】
出力手段132は、第1閾値を入力してメモリ(図示せず)に記憶する。その後、モードS応答処理部14からモードS応答のプリアンブルの検出有を特定する信号を入力すると、モードS応答のプリアンブル部分から求めた第1閾値を第2閾値として出力するとともに、第2閾値の利用の開始を促がす開始信号を出力する。また、出力手段132は、モードS応答処理部14でプリアンブル検出からプリアンブルに続くデータブロックの処理が終了する信号を入力すると、第2閾値の利用を終了させるリセット信号を出力する。
【0021】
選択手段133は、演算手段131から入力する第1閾値を出力しているが、出力手段132から開始信号を入力後、リセット信号を入力するまでの期間は、出力手段132から入力する第2閾値を選択して出力する。すなわち、選択手段133は、第1閾値を出力するとともに、受信信号からモードS応答のプリアンブルが検出されてから所定期間(データブロックの処理期間)は、第1閾値に代えてプリアンブルのピーク値を用いて決定された第2閾値を二値化処理に使用する閾値として選択する。
【0022】
遅延手段134は、演算手段131、出力手段132及び選択手段133の処理に合わせて受信信号を出力する。
【0023】
二値化処理手段135は、遅延手段134から入力する受信信号を、選択手段133で選択された閾値を利用して二値化処理し、受信信号の二値化データを出力する。
【0024】
また、図示を用いた説明は省略するが、第2処理部13Bにおいても、第1処理部13Aと同様に、演算手段、出力手段、選択手段、遅延手段及び二値化処理手段を備えており、拡張スキッタを二値化処理して出力する。
【0025】
ここで、第1処理部13AにおいてはモードS応答に対応する受信信号が処理され、第2処理部13Bにおいては拡張スキッタに対応する受信信号が処理されるため、第1処理部13Aから出力される二値化データと、第2処理部13Bから出力される二値化データとは異なるデータとなる。
【0026】
図2に示すように、モードS応答処理部14は、受信信号の二値化データからモードS応答のプリアンブルを検出する検出手段141と、プリアンブルが検出されると二値化データからモードS応答をデコードするデコード手段142とを備えている。
【0027】
検出手段141は、二値化処理部13で処理された二値化データを入力し、二値化データから、モードS応答のプリアンブルに規定される所定のパルスパターンの有無を検出する。また、検出手段141は、二値化データに所定のパルスパターンがあるとき、プリアンブルの検出有を特定する信号を出力する。また、検出手段141は、モードS応答のデコードが終了するタイミングで、データブロックの処理の終了を特定する信号を出力する。
【0028】
デコード手段142は、二値化処理部13で処理された二値化データを入力するとともに、検出手段141からモードS応答のプリアンブルの検出の有無に関する信号を入力する。デコード手段142は、プリアンブルの検出有の信号を入力すると、二値化データ(データブロック)をデコードし、デコード結果(データビット及び信頼性ビット)を出力する。
【0029】
また、図示を用いた説明は省略するが、拡張スキッタ処理部15においても、モードS応答処理部14と同様に、検出手段及びデコード手段を備えており、二値化データから拡張スキッタのデータブロックをデコードして出力する。
【0030】
モードS応答処理部14から出力されるモードS応答のデコード結果及び拡張スキッタ処理部15から出力される拡張スキッタのデコード結果は、処理装置40に収集され、航空機30の位置の測位に利用される。
【0031】
図3を用いて、受信装置10aで受信信号を二値化する一例について説明する。図3(a)に示すようなマルチパスやノイズによる歪みが存在する信号を受信したとする。この場合、演算手段131でそれぞれのパルスを各パルスのピーク値から求められた第1閾値を利用して二値化処理すると、図3(b)に示すように、歪みの部分も有効な信号として二値化処理され、ヒゲのある二値化データが得られることになる。これに対し、実施形態に係る受信装置10aでは、プリアンブルが検出された場合、プリアンブルのピーク値から求められた第2閾値を利用してデータブロックを二値化処理する。したがって、図3(c)に示すように、歪みの部分は有効な信号とされずに二値化処理され、二値化処理の精度が向上する。
【0032】
各航空機30から送信される信号の信号レベルは一定であるが、各航空機30と受信装置10aの距離によって、受信装置10aで受信される際の信号の信号レベルが異なる。すなわち、航空機30と受信装置10aの距離が短いときには信号レベルは大きいが、距離が長くなるにつれ、信号レベルも小さくなる。したがって、航空機30から送信されたモードS応答や拡張スキッタでは、プリアンブルを構成する各パルスの信号レベルとデータブロックを構成する各パルスの信号レベルとは略同一であるため、プリアンブルの信号レベルをデータブロックの二値化に利用することで、データブロックにマルチパスやノイズによる歪み等が含まれていても、これらに影響されずに二値化することができる。実施形態に係る受信装置10aでは、このような特徴を利用し、プリアンブルから求めた閾値を利用して二値化処理を実行する。
【0033】
上述したように、実施形態に係る受信装置10aにおいて、プリアンブルから求めた閾値を利用して信号を二値化することで、受信信号の解析の信頼性を向上することができる。
【0034】
上記のように、本発明を実施形態によって記載したが、この開示の一部をなす論述および図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施形態、実施例および運用技術が明らかとなる。また、本発明はここでは記載していない様々な実施形態等を含むことは勿論である。
【符号の説明】
【0035】
1…マルチラテレーションシステム
10a〜10c…受信装置
11…アンテナ
12…受信部
13…二値化処理部
13A…第1処理部
131…演算手段
132…出力手段
133…選択手段
134…遅延手段
135…二値化処理手段
13B…第2処理部
14…モードS応答処理部
141…検出手段
142…デコード手段
15…拡張スキッタ処理部
16…出力部
20…送受信装置
30…航空機
40…処理装置
50…レーダ装置
【特許請求の範囲】
【請求項1】
航空機が送信した信号を受信する受信装置であって、
受信信号のピーク値を用いて当該受信信号の第1閾値を求める演算手段と、
前記演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えて前記パルスパターンのピーク値を用いて求められた第2閾値を選択して出力する選択手段と、
前記選択手段から出力される閾値を利用して、受信信号を二値化する二値化処理手段と、
を備えることを特徴とする受信装置。
【請求項1】
航空機が送信した信号を受信する受信装置であって、
受信信号のピーク値を用いて当該受信信号の第1閾値を求める演算手段と、
前記演算手段で決定された第1閾値を出力するとともに、受信信号から所定のパルスパターンを検出後所定の期間、第1閾値に代えて前記パルスパターンのピーク値を用いて求められた第2閾値を選択して出力する選択手段と、
前記選択手段から出力される閾値を利用して、受信信号を二値化する二値化処理手段と、
を備えることを特徴とする受信装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−92381(P2013−92381A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−232684(P2011−232684)
【出願日】平成23年10月24日(2011.10.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月24日(2011.10.24)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]