
受動的検出装置
複数のアンテナ、受信器、及びデジタルビーム成形器を備え、アンテナ及び受信器は、近視野領域からミリメータ波長の放射を受け取り、それを処理してデジタル化するようにされた受動的検出装置が開示される。ビーム成形器は、受け取った情報を処理し、そして領域に関する静的映像情報を発生するようにされる。当該物体の存在を指示するため指示手段が設けられる。ビーム成形器は、装置から異なる距離にある複数の平面において同時に情報を発生するように優先的に構成される。指示手段は、映像情報を表示するために装置の長さに沿ってピクセルのアレーを含み、そして多平面情報を使用して、複数の平面からのデータより成る領域の映像を構成する。本発明は、セキュリティ検出装置が使用された空港や他の場所のようなセキュリティ走査用途で利用される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受動的像形成及び検出システムに係り、より詳細には、例えば、個人の衣服の下や、梱包又は荷物の中や、床下や、壁の中又は壁の後に視覚的に隠された物体を検出し又は探索するのに使用できるシステムに係る。
【背景技術】
【0002】
人間や物体をサーチして、禁制品やナイフや他の武器のような幾つかの品目、又は盗難品等をチェックすることが頻繁に必要とされることから、迅速且つ効果的なサーチ手順を使用する必要が生じている。現在の手順は、各個人を服の上から身体検査するか、空港やターミナルや競技場のセキュリティ管理エリアに入る各梱包を開くか、又はスポットチェックを行うことを含む。これは、時間がかかり、サーチされる人々を苛立たせ、又、労力を要する。又、小さな物や上手く隠された物は、発見できないことがある。現在、種々の技術が使用されているが、いずれも、効率、認められる安全性又はコストに関して欠点がある。
【0003】
特に空港におけるアーチ道システムの形態の金属検出器は、ある量の金属を所持している個人を識別するのには有用であるが、どんな金属物品か又はその正確な位置に関する指示を与えるものではなく、従って、依然として、警備員が個人の詳細な身体検査を行なうことになる。
【0004】
X線装置は、梱包の検査に一般に使用され、梱包内を目に見えるようにするが、イオン化放射線の使用に関連した実際的な又は認められた健康上の危険性のために、人間や動物のサーチには適していない。更に、少量の原子番号の低い金属の検出や、ある有機及び無機物質の弁別には、X線センサは役立たない。
【0005】
個人のセキュリティスキャニングのために現在追及されている赤外線システムも、この帯域での衣服の透過性が悪いために役立っていない。
【0006】
衣服を通して像形成する能力を発揮するミリメータ波システムは、個人の衣服の下に隠された金属及び非金属の両物体を検出及び探索できるために、最近、受け容れられている。例えば、“Passive Millimeter Wave Imaging Technology IX”Volume 6211, Proc. SPIE, Defense and Security Meeting, Orlando, April (2006)を参照されたい。この能力は、センチメータ帯域(数GHz)から、低テラヘルツ領域をカバーするサブミリメータ波帯域(ここでは、一般的にミリメータ波帯域と称される)まで存在し、能動的及び受動的の両システムを包含する。この帯域にわたる能力の兼ね合いは、低い周波数では、隠れたものの貫通性が高いが、回折制限解像度が悪く、そして帯域の高い端では、その逆になるというものである。又、非金属性物質に対するこの帯域での弁別能力も良好である。例えば、人間の身体を含む多くの有機固体や液体において大きなダイポールモーメントを伴う水の存在のために、多くの符号は、多くの共有結合された無機固体及び液体とは極めて異なり、これは、多くの場合に、セキュリティの脅威に関連付けられる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、ミリメータ波像形成システムは、かさばる上に高価であり、しばしば、大きな可動部を有し、これは、この技術の市場での受け容れについて重大な問題である。更に、ある物質を検出するためには、1Kより著しく低いラジオメトリック感度が要求され、これは、既存のPMMW像形成システムに対する現在の課題となっている。現在の像形成システムは、システム感度が典型的に数ケルビンのレベルであり、従って、この重要な市場要件を満足することができない。更に、現在のPMMW像形成技術は近視野で動作するので、視界深度が浅くて、典型的に、数センチメータであり、これは、セキュリティ走査される個人が、像形成される間、ある固定体積の空間内に留まることを要求され、甚だしい動作上の制約となることを意味する。
【0008】
本発明の目的は、上述した従来技術の欠点を克服するか又は少なくとも改善しながら、多数の異なる目的で物体を探索する便利な手段を提供することである。
【課題を解決するための手段】
【0009】
本発明によれば、アレーに配列された複数のアンテナ素子を備え、各アンテナは、ミリメータ又はサブミリメータ波帯域の放射を受け取り且つ受信器システムに接続され、更に、デジタルビーム成形器、プロセッサ及び指示手段も備え、受信器は、ターゲットからラジオメトリック放出を受け取ってデジタル化し、又、前記ビーム成形器は、受信器システムからデジタル情報を受け取ってその情報をプロセッサへ通すようにされた受動的検出装置において、前記ビーム成形器は、更に、前記受け取った情報を処理して、前記アンテナアレーの近視野領域に収束させるようにし、前記プロセッサは、前記ビーム成形器に相互接続されていて、前記装置の少なくとも一次軸にリアルタイム又はほぼリアルタイムで静的映像情報を周期的に発生するようにされ、更に、前記指示手段は、発生された静的映像情報に基づく指示を与えるようにされたことを特徴とする検出装置が提供される。
【0010】
処理された映像情報は、ピクセルの線で構成される一次元(1D)映像、ピクセル又はボクセルの二次元アレーで構成される二次元(2D)映像、或いは三次元ボクセル映像で構成される三次元(3D)映像を含むことができる。
【0011】
このような映像情報は、これを1D、2D又は3Dとすれば、ここでは、静的映像情報として知られている。というのは、装置と対象物との間に相対的な動きがほとんど又は全くない比較的短い時間スパンで得られる映像情報だからである。
【0012】
本発明は、ハンドヘルドポータブル装置として又は固定設置の検出装置として動作するのに便利な装置であって、静止又は移動物体を像形成し、或いは隠された金属及び非金属物体を暴露させる手段をなす装置を提供する。個人のセキュリティ走査については、検出器と個人との間に物理的な接触がなされないので、非侵襲的な身体検査手段をなし、そして梱包については、梱包を開けたり接触したりせずに中身を確認するための手段をなす。例えば、持ち主のいないバッグを片側から走査することができる。
【0013】
この装置は、装置内に形成された映像を表示するためのディスプレイ手段を備えた一体的な指示手段を有する。アンテナ素子は、装置の表面にアレーとして配列されるのが好ましい。アレーは、一次元でも二次元でもよい。装置によって発生された静的映像情報は記録され、そしてポータブル装置の場合には、装置の異なる物理的位置又は配向、その物理的移動及び別の配向から記録された順次の静的映像が合成され、従って、付加的な情報が収集されることにより改善された映像が与えられる。装置と対象物との間の相対的な移動は、良好な映像サンプリングを与えることができる。一次元静的映像の場合には、この相対的な移動は、走査されている物品又は個人の一部分又は全体の映像の別の次元を露呈するように利用できる。装置を門に取り付けるときのように固定設置する場合には、対象物の物理的な移動、例えば、センサを通り越す個人又は梱包の直線又は円形移動により、この付加的な次元又は良好なサンプリングを与えることができる。2つ以上の静的映像から作られたこのような映像は、ここでは、複素映像として知られており、そして複素映像を生成するのに使用される情報は、複素映像情報として知られている。複素映像は、2D又は3D映像でよい。
【0014】
指示手段は、ディスプレイと共に又はそれに代わって、音声発生器、光発生器、振動ユニット、又は他の適当なインジケータを含むことができる。このようなインジケータは、当該物体が検出されると、アクチベートされるように構成される。又、インジケータ手段は、擬似カラー、輪郭、又は検出された物体を容易に識別できるようにする他の処理方法により向上された表示を与えるようにしてもよい。
【0015】
この装置は、次々の周期的に得られる静的映像を複素映像へ合成するプロセスの助けとなるように、装置の1つ以上の部分の移動方向、又は1つ以上の移動度を検出するための手段を組み込んでもよい。
【0016】
それとは別に又はそれに加えて、装置は、異なる静的映像において相関プロセスを使用し、そしてその結果を使用して、複素映像を発生することができる。このようなプロセスは、種々のチャンネルにおける情報の変化率を使用して、装置の移動を推定し、従って、移動により比較的歪められていない複素映像情報を発生することができる。
【0017】
一体的なディスプレイは、装置の位置及び/又は配向に基づいて映像の一部分しか示さないようにされてもよい。表示されるべき映像の部分は、装置の位置及び配向に一致するように配置されるのが好ましい。従って、表示される映像は、装置が移動されるときに変化する複素映像の細い「スライス」のビューのように見える。このように、所与の瞬間に装置の下に何があるか(即ち、装置によって像形成される領域)のビューがディスプレイに現われ、装置が移動されるときに束の間の複素映像を見る者に与える。映像は、所与の瞬間に単一の静的映像を表示する装置の一次軸に沿って配列された1行のピクセルで構成される。或いは又、映像は、2行以上のピクセルで構成されてもよい。各行間にギャップがあってもよい。
【0018】
この装置は、受信アンテナのアレーにより受信された信号を適切に処理することにより映像へと変換できる情報を与える。装置の典型的な寸法や、精密検査されている物体又は個人に対するその接近度により、装置は、アンテナシステムの近視野で像形成することができる。説明上、物品は、最長アパーチャー直線寸法の二乗を動作波長で除算したおおよその値より装置に接近している場合に、近視野にあるとする。
【0019】
受信信号に対する処理は、近視野で動作する場合に、変更形式の相関像形成を含み、変更は、装置が、そのアンテナアレーの近視野領域内から発せられる放射を収束できるようにするものである。
【0020】
又、この装置は、一体化された金属検出機能を組み込むこともできる。金属検出器は、検出された金属性物体を装置の局部領域に関連付けるようにされた複数のセンサを備えているのが好ましい。
【0021】
以下、添付図面を参照して、本発明を一例として詳細に説明する。
【発明を実施するための最良の形態】
【0022】
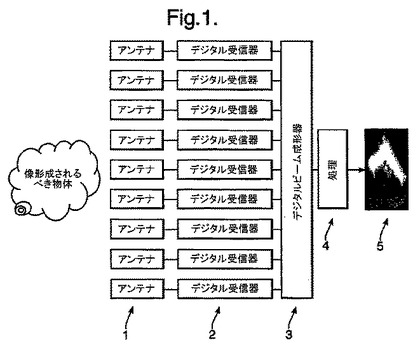
図1は、装置の重要なコンポーネントを概略的に示す。複数のアンテナ素子1は、一緒に、装置の瞳孔平面アンテナを画成する。各アンテナ1は、デジタル受信器2にリンクされる。アンテナ1及びデジタル受信器2の数は、特定の実施形態の要件に基づいて変化してもよい。デジタル受信器2の出力は、デジタルビーム成形器3に接続され、これは、次いで、プロセッサ4に、次いで、ディスプレイ5又は他の適当な指示手段にリンクされる。「瞳孔平面」アレーという語は、像形成装置の焦点にある焦点平面に対抗して、像形成装置のアパーチャーの平面を指すことに注意されたい。2つの平面における情報は、フーリエ変換により数学的に関係している。フェーズドアレーレーダー及び電波天文学干渉計システムのような無線スペクトルにおける幾つかの形式の受信器は、瞳孔平面受信器を使用し、一方、ほとんど全ての光学像形成システムは、例えば、人間の目のような焦点平面アレー受信器を使用している。
【0023】
図1の受信器区分2は、増幅及びフィルタ段、及びショートワードデジタイザで構成される。この段には検出又は信号平方が存在しない。というのは、ビーム成形器3のために位相情報を得る必要があるからである。図1に示すアーキテクチャーは、ヘテロダインアーキテクチャーを暗黙のうちに含むことはなく、低周波数コンポーネントを使用する便宜上、ヘテロダイン混合マニホールドが付加的に含まれてもよい。これは、システムの各チャンネルにおいてヘテロダインミクサへと分配される単一の局部発振器を使用する。局部発振器の分配における位相項は、以下に述べるように、システム校正段に含まれる。同様に、バンドパスサンプリングがデジタル化に使用され、その後に、デジタルダウン変換に使用されて、同相及び直角位相信号のデジタルサンプルを生成する。
【0024】
図1の各デジタル受信器2に存在するデジタイザは、単にショートワードでよく、即ち良好な映像を生成するのに単一ビットで充分であり、ラジオメトリック強度の絶対レベルに関する情報を保持するのに2ビットが要求され、4ビットワードに対する映像クオリティについては収穫逓減に到達する。ショートワードを使用するサンプリングは、検出前の信号対雑音比が1であるので、ラジオメトリックでしか知覚できず、これは、熱放出の一般的な特性であることが確認される。
【0025】
本発明による装置のラジオメトリック温度感度(本明細書のどこかに示された参照文献LeVineを参照されたい)は、式1により与えられる。但し、TA及びTNは、シーン放射温度及び受信器ノイズ温度であり、BRFは、高周波帯域巾であり、tINTは、特定の積分時間であり、そしてFは、受信アンテナでカバーされるシステムの全アパーチャーの断片である。

【0026】
性能に関して市場の期待を満足できるPMMW像形成システムは、当然、リアルタイムオペレーション(tINT〜40ms)に対して数ケルビン以下のラジオメトリック感度を要求する。従って、最小帯域巾BRFは、数百MHz程度であり、一方、理想的な帯域巾は、20GHzまで上昇し得る。それ故、信号エイリアシングに対するナイキスト制約は、その2倍のサンプル周波数を要求し、ADCの技術に大きな需要を課すが、全ての必要な位相及び振幅情報が記録されることを保証する。このような高速サンプリングは、多くのフィールドプログラマブルゲートアレー(FPGA)デバイスに見られるシリアル入力を使用することによりここに述べる実施形態において新規で且つ経済的な形態で達成することができる。これらのデバイスは、シリアル入力における比較器を単一ビットADCとして使用することで利用されてもよく、これは、現在、10Gspsまでサンプリングする能力を有する。ポテンシャル分割器を通して結合されたこれら入力の対は、高速2ビットADCを構成するのに利用できる。
【0027】
図1の受信器及びアンテナは、異なる偏波を有する信号を独立して処理するようにされる。これは、情報が、例えば、水平及び垂直偏波、又は左側及び右側円偏波に関して収集されるのを許す。二重又は多偏波アンテナが良く知られている。多数の偏波センサを使用することは、付加的な融通性を与え、パワフルな弁別能力を提示し、物質の分類及び識別を行なうための大きな潜在性を許す。これが可能となるのは、異なる材料からの放出及び異なる方向からのビューが、変化する既知の偏波計測符号を有するからである。
【0028】
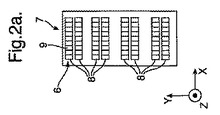
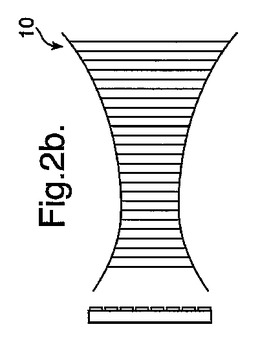
図2は、本発明の第1の実施形態を示す。図2aに示されたアンテナ素子6の一次元(1D)アレー8は、タイル7の前面に取り付けられている。タイル7は、受信器アレー2及び一次元ビーム成形器3を含み、プロセッサ4及びディスプレイ5にリンクされる(図1に示すように)。アンテナ素子6の1Dアレー8は、装置の軸にあり、そして1Dアレーの各アンテナ素子6は、個別のサブアンテナ素子9で形成することができ、これらは、軸に直交する方向及び距離でビーム10を収束するよう互いに対して固定の仕方で整相され、図2bに示すように、装置の空間的解像度を改善する。それ故、基本的アンテナ6の各々は、他の素子6の他のアンテナパターンとオーバーラップする図3bに示す扇状ビーム12を有し、これは、1Dのデジタルビーム成形器3が軸に沿った次元にビーム成形するのに必要なことである。
【0029】
図2cは、アンテナ6によって発生された扇状ビームをどのように処理して、ボクセル11のセットとして指示された距離情報を与えるかを概略的に示す。
【0030】
図3は、図3aに示す第1実施形態のオーバーラップする扇状ビーム12が、どのようにして図3bに示す隠された物体の1D静的映像13へとデジタルでビーム成形されるかを示す。図示されたように多数の1D静的映像13を得ることにより、装置がターゲットシーンに対して移動されるときに、2D映像14が図3cに示すように構築される。
【0031】
本発明による装置は、おそらく、近視野で適用するものであり、従って、図2cに示すように、位相シフトにより像形成装置を多数の異なる近視野距離に収束することができる。静的映像を発生するために記録される近フィーリド情報は、当然、装置の軸に沿って且つ距離において次元を有する2Dボクセル素子で構成される。これは、1D映像を与えるように処理することで潰すことができる。或いは又、2Dボクセル情報を、取得した他の2Dボクセルと一緒に記憶して処理することができる。それ故、その後の処理は、対象物の3Dボクセル映像を発生するように行なわれる。3Dボクセル情報は、シーンにおける隠れた物体の空間的位置を決定するように分析されてもよいし、又は処理を通して、オペレータに最良の2D映像を与えるように距離軸において潰されてもよく、この映像では、全ての物体は、近視野距離に関らず、焦点が合っている。
【0032】
第1の実施形態は、装置に一体的なプロセッサ及びディスプレイを組み込むが、それらがリモート位置にあって適当なインターフェイスによりリンクされてもよい。ディスプレイは、装置の使用精度に基づいて1Dでも2Dでもよい。
【0033】
図4は、本発明の第2実施形態を示す。これは、アンテナ素子の1Dアレーを使用するという点では、上述した第1実施形態と原理的に同様であるが、個人や品目を検査するための杖として使用されるポータブル装置とされる。杖15は、取手16、及びアクティブ領域17を備えている。アクティブ領域17は、アンテナ18の直線アレーを下側に組み込んでおり(点線で示す)、そしてアンテナ18からの信号を処理してそれを映像情報へ変換するための電磁回路(図1を参照して述べた)を収容している。アンテナ18のアレーは、図2に示されたアレー8と同様である。映像情報は、ディスプレイ19に表わされると共に、ディスプレイ20にも表わされる。ディスプレイ19は、高アスペクト比のディスプレイスクリーンであり、所与の瞬間にアクティブ領域17の下に何があるかに関する情報を表示するように構成されるが、ディスプレイ20は、杖15が最近スイープされたところのエリアに対応するより完全な映像を示すようにされる。
【0034】
第2実施形態に使用される処理は、第1実施形態に関連して述べたものと同様であるが、受信器は、デジタイザに供給される信号周波数を下げるためにダウンコンバータを組み込んでおり、デジタイザの必要能力を容易にすると共に、そのコストを低減している。
【0035】
アンテナアレー18は、パッチ、ショートホーン又はスロットアンテナ素子のアレーを含むのが好ましいが、当該波長で動作し得る適当なサイズのアンテナ素子を受け容れることができる。アンテナ素子は、杖状の装置を使い易くするために装置に沿って軸方向に配列される。各アンテナ素子は、軸方向に広く且つ横方向に狭い放射ビームパターンを有する。このような構成は、ビーム成形器におけるビーム成形技術を使用して、両軸に狭いビームを発生し、最終映像に満足な解像度を与えることができる。横軸における各アンテナ18の放射パターンは、ガウスパターンに近似し得る。一次元の電子ビーム成形の場合、横方向のビーム成形は、軸方向よりも横方向に利得が高いアンテナの一次元軸方向アレーにより与えられる。電子ビーム成形が機能するためには、アンテナのビームパターンが、図3aに示すように、オーバーラップしなければならない。二次元電子ビーム成形の場合には、アンテナの利得がオーバーラップして電子ビーム成形を可能にするように1つ以上の隣接軸方向アレーが使用される。
【0036】
図4に示す実施形態は、16個のチャンネルを有し、各チャンネルは、個々のアンテナ素子1と、受信器/ダウンコンバータ2とを有する(図1に示すように)。しかしながら、付加的なハードウェアの経費がかかり且つ処理要求が増えるにも関らず、解像度の改善を与えるためには、より多くのチャンネルをもつことが効果的であり、或いは性能要求が軽減される場合には、より少数のチャンネルとされる。
【0037】
各受信チャンネル2は、当該周波数範囲及び帯域巾で動作できるものであれば、適当な受信器でよい。典型的に、本発明のこのような実施形態のRF帯域巾は、約1GHzないし20GHz、例えば、2GHz、又は5GHz、又は10GHzであるが、他の実施形態では、この範囲外の帯域巾を有してもよい。受信器2の典型的なRF動作周波数は、30ないし100GHzの範囲であるが、技術の改良により高い周波数での製造コストが低下され、それに伴い、システムの空間的解像度が高まるにつれて、周波数範囲がアップ方向に拡張する傾向となる。本発明のこの実施形態は、テラヘルツまでの周波数又はそれを越えても、それら周波数で動作できる増幅器、受信器、ダウンコンバータ、等の入手性によっては、有用である。
【0038】
各受信器2は、受信信号を中間周波数(IF)へとダウン変換し、そこで、より便利に処理することができる。局部発振器(LO)信号は、この目的で各受信チャンネルへ供給される。LOは、全ての受信チャンネルにわたって位相コヒレントであるのが好ましい。
【0039】
各受信チャンネル2の出力は、デジタル化システム(図示せず)を使用して、アナログ信号からデジタル信号へ変換される。デジタル化システムは、受信チャンネルごとに単一ビットのアナログ/デジタルコンバータを使用するのが好ましい。これは、適当な信号対雑音比を維持しながらデジタル化システムの出力におけるデータレートを最小にするという効果を有する。便利なことに、フィールドプログラマブルのゲートアレー装置に通常見られるシリアル入力は、非常に高い速度で動作できる単一ビットデジタイザとして使用できる。或いは又、特定用途向け集積回路(ASIC)をシステムに使用して、よりコンパクトなシステム及び/又は低い電力消費を与えることができる。
【0040】
上述した両方の実施形態は、以下に述べる相関像形成ビーム成形技術を利用して、瞳孔平面アンテナの密度に基づき、〜nないしほぼn2個のピクセルより成る静的映像情報を生成し、但し、nはアンテナ素子数である。装置13の横方向移動を使用して、精密検査される物体の異なる部分からの静的映像情報と、上述したように多数の静的映像データを合成することで構築される複素映像とを生成する。
【0041】
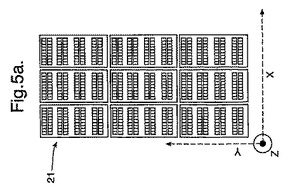
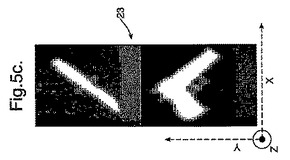
図5は、2D瞳孔平面アンテナアレー21を組み込んだ本発明の第3実施形態を示す。このアンテナアレー21は、図示されたようにX軸に複数のアンテナをもつことによって2Dアレーが形成される以外、前記実施形態と各々同様である基本的アンテナで構成される。アレー21の各アンテナは、前記実施形態と同様に、デジタル受信器にリンクされ、受信器は、2Dデジタルビーム成形器に信号供給する。アンテナアレー及びデジタルビーム成形器の次元を1Dから2Dへ拡張することは、瞳孔平面の軸で測定される静的映像情報22の次元も同様に1Dから2Dへ増加されることを意味する。アンテナのビームパターンは、静的映像のサイズが、Y軸に垂直よりも、Y軸においてより大きくなるように、構成することができる。これは、図5bに示すように、それにより得られる2D映像22が細長くなることを意味する。映像サイズは、第1及び第2の実施形態の場合と同様に、X又はY方向における相対的な移動により増加できる。歩道やエスカレータにおける人間の、又はコンベヤベルトにおける物体の自然の移動をこの作用に利用して、図5cにシミュレーションして示すように、より大きくて、より詳細な映像23を発生することができる。
【0042】
この第3実施形態では、壁や、ドアや、セキュリティ走査門エリアのようなフラットなエリアを、これらの瞳孔平面アンテナアレーで二次元においてタイル化して、既存のPMMWセンサに比して足跡サイズを著しく減少したPMMW像形成能力を与えることができる。これらの基本的な構築ブロックは、慣習的な受動的ミリメータ波光学システムに比してアンテナの比較的薄い性質のためにウェハタイルの名前により参照される。このセンサは、近視野で機能するので、瞳孔平面アンテナからの各信号を他の全ての信号と合成することを必要としない。局部的グループが合成され、これは、デジタル形態のデータを有するときには、アナログプロセスよりも困難でない。
【0043】
本発明、及び瞳孔平面アレーの使用は、後方の受信器及び処理ハードウェアを含む装置を、既存のPMMW像形成システムにおいて準光学的像形成するために必要な等価な体積より非常に小さく形成できるようにする。パッチ、スロット又は短い導波管ホーンであるアンテナ、及び受信器だけは、波長厚み程度で作ることができ、これは、現在のかさばるシステムで可能である以上の多数の仕方でシステムを展開できることを意味する。これは、従来の光学的PMMW像形成システムに比して、ほぼ2桁の大きさの体積減少を果たす潜在性を与える。更に、以下に述べるように、近視野に非常に大きな視界深度を与える電子走査システムの能力は、現在のPMMW像形成システムの能力から甚だしい動作上の制限を除去する。更に、瞳孔におけるアンテナの密度は、システムのラジオメトリック感度が幾つかの検出困難な物質の検出要件を満足できるように同調させることができる。これは、瞳孔平面受信システムを、既存の機械的走査システムより著しく敏感にできることを意味する。
【0044】
前記実施形態におけるビーム成形プロセスは、先に引用された「トンプソン」に示されたような電波天文学の分野、及びもっと最近では、地球観察の分野に一般的に使用される相関像形成の変更形態でよく、これについては、LeVine、D.M.及びSwiftの“Synthetic Aperture Radiometers for Microwave Remote Sensing from Space”、0−7803−3068−4/96$5.00(c)1996IEEEを参照されたい。天文学における相関像形成は、明らかに遠視野から得たデータを使用し、そして一般的には、地球の回転を使用してしばしば数千マイル離れて位置された地球ステーションより成る非常に希薄な受信器アレーを使用して実行され、ビジビリティ関数の全空間的周波数にわたり情報をポピュレートする(以下に定義する)。天文学的物体の単一の映像が、何日又は何週間の周期にわたって一般的に累積される。本発明の装置に電波天文学技術を直接適用しても、近視野に対して映像を焦点に形成しないし、充分な感度をもった装置ともならない。電波天文学の形態と本発明の形態との間の更なる相違は、前者が通常数GHzの周波数及び狭い帯域巾に関連し、従って、アナログ技術の使用が依然主流であるのに対して、本発明では、それより高い周波数及び100MHz以上の帯域巾にプライオリティが置かれ、デジタルプロセッサでの機能についてのみ以下に説明する。従って、本発明で述べる映像によりリアルタイム映像又はほぼリアルタイムの映像を近視野に発生できるようにするために、装置及び信号処理の両方を根本的に変更する必要がある。
【0045】
古典的な電波天文学的解決策(例えば、Thompson、A.R.Moran、J.M及びSwenson、G.W.“Interferometry and Synthesis in Radio Astronomy”、第2版、Wiley、(2001年)を参照)では、詳細に述べられたように、二次元空間的周波数スペースにおいて受信器の対により測定された電界の積の複素振幅の累算(積分時間にわたる加算)としてビジビリティ関数が定義される。空間的周波数は、受信器対の分離(ベクトル量)を、放射のない空間波長で除算したものである。電波天文学の言語では、電界のこの乗算は、式5において明らかなように信号の1つにおける相対的な遅延を導入できるので、相関と称される。従って、それにより得られるビジビリティ関数は、遠視野映像の空間的周波数情報を含む二次元マトリクスである。ビジビリティ関数がフーリエ変換されると、遠視野映像を生じさせる。数学的には、これは、式2のように表わされ、ここで、l及びmは、見る方向の方向コサインであり、u及びvは、対応する空間的周波数座標である。既存の発明に適用すると、この処理方法は、単一のビジビリティ関数が近視野映像からの位相情報を破壊するので失敗となり、従って、近視野において収束能力は存在しない。
T(l、m)=FT[V(u、v)] (式2)
【0046】
それ故、相関像形成アルゴリズムは、それが近視野において機能できるよう変更されている。近視野像形成は、本発明を従来技術とは別に設定する態様の1つである。アンテナの近視野とは、物体のポイントとアンテナアパーチャーのポイントとの間の位相差が、アパーチャーにわたる波長の所定の分数より大きく変化する領域として定義される。波長の1/8の場合、これは、近視野の最大範囲RNFを式3で表わされるようにする。但し、Dは、瞳孔平面アパーチャーのサイズであり、λは、放射の自由空間波長である。例えば、94GHzで動作する1mアパーチャーの像形成装置の最大近視野範囲は、〜300mである。
【0047】
明らかに、電波天文学干渉計ビーム成形像形成システムは、近視野では動作しない。アンテナの近視野での動作は、物体と映像空間との間の複雑な位相関係のために光学設計エンジニアに対して特定の課題を提起し、その結果、物体及び映像空間は、もはやフーリエ変換により簡単に関係付けされない。この位相関係は、像形成システムの視野を狭める作用を有する。位相が正確に波長の1/8の場合、視界深度ΔRDOFは、アンテナからの距離Rに対して式4で表わされ、これは、視界深度を、接近した距離においてPMMW像形成装置について数センチメータのみにする。
【0048】
その影響として、多数の焦点平面を使用することが必要となって、非常にコストがかかるか、又は特定の距離において像形成するために単一焦点平面アレーを所与の位置へ移動することが必要となり、他の距離からの潜在的に有用なデータが失われる。しかしながら、本発明は、3Dボクセル映像を発生する目的で近視野における複雑な位相関係を利用し、以下に述べるように近視野距離からのデータが失われることはない。
【0049】
加算相関マトリクスの生成は、n個の受信器からn(n+1)/2個の相関を生成することで達成される。加算相関マトリクスは、当然、位相及び振幅情報を保持するために複素数の量であり、数学的には、式5で表わされる。但し、vは、チャンネルi及びjにおけるラジオメトリックフィールドに対応する電圧であり、又、相対的遅延τは、信号の対間に導入することができ、そして加算は、毎秒25フレームシステムの場合に40msとなる積分時間tINTにわたって行われる。
【0050】
この時間遅延は、信号間の相関が保証されるように、波頭角度を補正するものである。しかしながら、時間遅延は、広い視野の映像を生成するためには必要でなく、瞳孔平面アレーの垂直の軸に対して映像の中心の角度位置をシフトするだけである。この時間遅延をヘテロダインプロセスの後に受信器において電子的に合成すべきである場合に、同時視野及び広帯域巾像形成(式7を参照)を実現化すべきであれば、以下に述べるように、デジタル位相相関を使用してそれを行なうことが必要となる。相関は、全てのチャンネルからのクロス相関及び自己相関の両方を含む。デジタルハードウェアにおいて節約するためには、相関の前にデジタル化のための要件を理解するのが重要である。その要件が良い映像のためのみであって、ラジオメトリック放出の絶対レベルに関する情報を伴わない場合には、加算相関マトリクスにおけるクロス相関だけが要求され、自己相関は、除外される。従って、ラジオメトリック放出のデジタル化は、単一ビットのデジタイザを使用するので充分である。これは、デジタル電子装置アーキテクチャーを著しく簡単化する。或いは又、放射線温度の絶対レベルに関する情報が、例えば、既知の放出レベルを有する物体を弁別する目的で要求される場合には、自己相関情報を加算相関マトリクスに含ませることが必要になる。この場合に、デジタル自己相関は、当然、信号を最小2ビットでサンプリングすることを要求し、さもなければ、相関が常に1となり、平均放出レベルに関する情報が失われることを理解するのが重要である。単一相関マトリクスは、少なくとも各ナイキストサンプル時間において生成されねばならず、この時間は、高周波数帯域巾の2倍の逆数であり、典型的に、数百ピコ秒である。従って、デジタル化電子回路からの信号方向は、デジタル相関器へ直接通される。相関マトリクスは、典型的に40msである映像フレーム時間にわたって一緒に加算され、従って、毎秒25フレームを与える。典型的に、数千万の相関マトリクスを累積して、加算相関マトリクスを生成することが必要になる。
【0051】
加算相関マトリクスは、次いで、多数の近視野映像を生成するための基礎と考えられる。これは、固定距離における単一映像でもよいし、又は像形成装置から異なる距離に各々収束される複数の映像でもよい。加算相関マトリクスは、アレーの前部にレンズを配置する効果を合成するように位相シフトされ、近視野のビジビリティ関数の等効物を生成する。この位相シフトされた相関マトリクスは、次いで、フーリエ変換されて、センサの前部に体積素子ピクセルの線を生成する。これは、像形成装置から特定の距離に一次元近視野映像を構成する。全ての望ましい近視野距離に対応する位相シフトを加算相関マトリクスに次々に適用して、アレーを異なる距離に効果的に収束することができる。1D瞳孔平面アレー及び1Dビーム成形器の場合には、これは、図2cに示すように、距離及び高さの軸(即ち、1Dアレーの軸)を有する2D静的映像を与える。装置の移動、及びそれにより生じる静的映像のその後の結合は、精密検査領域に関する3D映像情報を与える。この3D映像情報は、実際上、個々の「ボクセル」、又は3Dピクセルの情報を含む。2D瞳孔平面アレー及び2Dビーム成形器の場合には、3Dボクセル映像は、静的映像として直接生成される。いずれの場合にも、センサは、校正を要求し、その詳細は、以下で述べる。ここに述べる技術と電波天文学の技術との間の基本的な相違は、ここでは、近視野において、放出が発生した方向を指すだけでは不充分で、3D座標系において像形成装置の前に原点のボクセルも指す必要があることである。
【0052】
この方法の効果は、典型的に数百MHzないしGHzのサンプリング周波数で全てが動作する各近視野距離に対応する一連の全相関マトリクスを必要とする高周波段ではなく、加算相関マトリクスに位相補正を適用できることである。このように位相補正を行なうことは、単一の加算相関マトリクスが存在することを意味し、そして多数の近視野距離に対する位相シフトは、映像フレーム当たり一度、典型的に、40msごとに、適用するだけでよく、これは、ハードウェアをあまり必要とせず、ソフトウェアで容易に行うことができる。
【0053】
前記処理によって得られるボクセル情報は、標準的な映像処理技術を使用して更に処理されて、ナイフ、或いは他の武器又は禁制品のような当該形状を識別することができる。3D映像は、多数の異なる投影から分析でき、脅威を識別する上で助けとなる。
【0054】
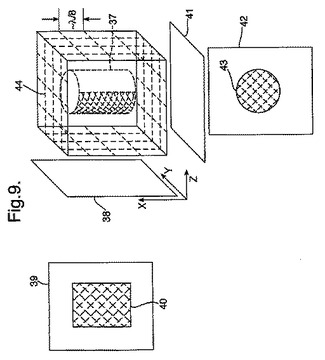
ボクセル映像は、三次元を二次元へと潰すように更に処理され、オペレータの解釈を容易にする。オペレータは、物体を検出することしか関心がなく、空の空間や透明な衣服に対応するボクセルは実際上問題としないので、このボクセル映像は、前者を強調するように処理されてもよい。潰すプロセスは、何らかの当該情報が存在する潰される軸において特定のボクセルを選択し、そして当該領域の全てのボクセルに対してこのプロセスを繰り返すことを含む。潰されるべき3D映像を、軸X、Y及びZを有するデータのアレーとしてみなし、潰すプロセスは、平面X、Yにおける各座標に対して、関心があると思われるZ座標のボクセルを選択する。各選択されたZボクセルは、軸X及びYを有する2D映像の一部分を形成する。従って、複素3D表面が有効に2D映像へと潰される。これが図9に示されている。見られるべき物体は、固体円柱37で構成される。瞳孔平面38において左から見た場合に、Z軸において潰されて得られる映像が、有用な映像情報を含むように第1ピクセルを選択することにより、ディスプレイ39に示される。円柱37の細切れ部分が長方形40として像形成される。これは、長方形40の全ての部分に焦点が合わされ、一方、普通のカメラは、瞳孔平面38から異なる距離にあるために円柱の異なる部分に焦点を合わすことができないという点で、普通のカメラで見られるビューとは相違する。所与のX、Y座標に対して2つ以上の当該ボクセルを選択し、そして例えば、2Dコンピュータスクリーンに3Dパースペクティブを使用することにより適当な仕方で表示することができる。例えば、誘電体シートは、部分的に透明であるので、その両側から映像データを与えることができ、従って、それにより得られる映像に両側を表わすことができる。このような物体の相対的な吸収度を示すために陰影を使用してもよい。
【0055】
円柱37の下の瞳孔平面41から円柱37を見ると、X軸において潰されてディスプレイ42に見られる円43が形成される。このビューは、通常のカメラで見られるものと同様である。というのは、瞳孔平面41から円柱37の像形成される部分への全ての距離が同じだからである。
【0056】
ハンドヘルドセンサの場合には、これは、パワフルな実用品である。というのは、センサの視界深度内に対象物があるかどうかオペレータが問題にしなくてよいからであり、即ちセンサを対象物に接近して配置するだけで動作が行われる。門システムについても同様に、対象者がそこを通過するときに対象者の全ての部分におそらく焦点が合わされる。
【0057】
達成できる解像度、即ち個々のボクセルの寸法は、デジタルビーム成形器に使用される位相精度に関係している。例えば、35GHzで見てλ/8の位相精度は、側部ボクセル寸法1mmを生じさせる。これは、細切れ線44により示される。しかしながら、実際には、おそらく達成される実際の空間的解像度は、回折制限のために、この数値とλ/2との間である。実際に、最適なボクセルサイズは、収穫逓減ベースで、得られる空間的解像度と、小さなサイズのボクセルを取り扱うのに利用できる処理パワーとの間の兼ね合いとして選択される。処理パワーの最適化は、放射の放出も散乱もないことが分っている空間に対応するボクセルを、より大きく構成することで、行われてもよい。これがどの領域であるかの情報は、この装置から又は別のセンサから適応式に決定することができる。
【0058】
ボクセル映像は、最も高いコントラストを有する平面区分、又は「空の空間」を含むと考えられない平面区分をハイライト処理する仕方で処理されてもよい。これは、コントラストを最大にする焦点長さを選択することで焦点合わせ動作を実行する自動焦点カメラに類似している。しかしながら、視覚カメラとは異なり、本発明では、近視野空間の異なる領域において多数の異なる距離にある物体は、全て同時に焦点を合わせることができる。実際に、これは、非常に大きな視界深度をもつカメラと同様である。
【0059】
又、映像を潰すことは、静的な映像において行われてもよく、図2cに示された二次元平面映像が一次元の線ピクセル映像へと潰される。一次元の線映像は、次いで、相対的なセンサ−対象物移動を利用して領域にわたって機械的に走査され、二次元映像を形成することができる。
【0060】
平面又は体積にわたり異なる距離に同時に焦点を合わせる能力を利用する更に別の用途は、光学的システムを使用して、多次元映像の軸を潰すところの形状を選択することである。複数のカメラを備えた光学的システムを使用して、個人のような物体を像形成し、そしてその映像を使用して、物体の重要な座標を決定することができる。次いで、本発明による装置で記録された多次元映像を、その決定された座標を使用して物体の周りで潰し、その潰された映像の焦点が物体の表面に対応するようにする。潰される映像は、1Dでも2Dでもよいが、オペレータが解釈するのには2D映像がより便利である。
【0061】
ある意味では、3Dボクセル映像は、立体知覚のより精巧な形態であり、三次元において物体を探索する能力を他のセンサと一緒に使用して、金属検出器又はX線システムからのデータと合成するような相補的な能力を与えることができる。
【0062】
本発明では、信号は、当然、特にPMMW像形成のための従来未認識のパワフルな能力を与えるビーム成形段の前にデジタル化され、主にアナログ技術が使用された電波天文学の古典的分野から区別する。例えば、トンプソンA.R、モランJ.M及びスエンソンG.Wの“Interferometry and Synthesis in Radio Astronomy”、第2版、ウィリー(2001年)を参照されたい。PMMW像形成装置では、同時の広い視野(使用要件)及び広い高周波帯域巾(良好なラジオメトリック感度を与えるための;式1を参照)が要求される。しかしながら、帯域巾BRFを増加すると、式6で表わされるように、放射コヒレンス長さIcが短くなり、但し、cは、光速である。これは、ラジオメトリック放出の相関が保証される視野を制限し、これにより、半角度θ1/2である計器視野を、式7で与えられるものに制限し、但し、Dは、アパーチャーサイズである。しかしながら、帯域巾と視野とのこの見掛け上の相互排他性は、受信器からの信号を、式7を個々に満足する一連の狭帯域チャンネルへとデジタルフィルタリングすることにより検索することができる。これは、かさばるアナログフィルタを使用するのではなく、デジタル技術を使用して非常にコンパクトに行なうことができる。相関プロセスの後に、異なる帯域巾信号を再構成することができる。
【0063】
天文学に使用される従来の処理と本発明との間の更なる相違は、受信器の前端にヘテロダインシフトが使用される場合に、信号分散が導入され、ビーム成形を有効に機能させるにはこれを除去する必要があることである。この除去を行なわないと、像形成装置は、広い高周波帯域巾を伴う狭い視野となるか、又は狭い高周波帯域を伴う広い視野となる。この場合も、相互排他性は、電波天文学では受け容れられるが、PMMW像形成装置では全く受け容れられない。デジタル技術を使用すると、ヘテロダインシフトで誘起される分散は、ラジオメトリック信号のデジタル時間履歴に、周波数に比例する位相シフトを乗算することにより補正することができる。これは、広い周波数範囲にわたってアナログ技術を使用して行なうのが非常に困難である。しかしながら、天文学的信号を処理する従来技術では、取り扱われる帯域巾に限度があるために、アナログ技術も、選択すべき有効な方法である。分散は、ダウン変換中の断片的帯域巾変化として、混合プロセスを通して生じる。分散を有効に除去できるアナログコンポーネントは、まだ見つかっていない。しかしながら、デジタルフィルタは、その分散特性を任意に固定できるので、このタスクに理想的に適している。時間シーケンスに適当なデジタル時間応答を一度乗算すれば充分である。
【0064】
科学の複雑さから、この用途に対するデジタル技術の有益さは、直ちに明らかではない。同じ帯域巾に対して、デジタル技術は、一般的に、アナログ技術よりコストがかかり、かさばるので、これらの複雑な問題を理解しない限り、PMMW像形成装置のアーキテクチャーに対して普通にないステップが取られる。特に、ラジオメトリック感度を達成するための帯域巾についての大きな需要−これは、非常に多数の並列なデータチャンネルが、全て、1GHz以上のクロック速度で動作することを必要とする−に関して、デジタル解決策の有益さと、それにまつわる複雑さとが全く明らかでない。
【0065】
受信モードのみで動作する従来のビーム成形レーダーからの相違は、ノイズの統計値、受信器のアーキテクチャー及び格子ローブ発生が極めて異なることである。フェーズドアレーレーダーでは、充分な信号対雑音比を達成するためにコヒレントな信号を長ワードでサンプリングしなければならないが、電子ビーム成形の受動的なミリメータ波像形成装置は、上述したように、信号積分の前の信号対雑音比が1であるので、単一ビットサンプリングを使用して機能することができる。熱発生放射の性質のために、短い高周波時間スケール(〜1/BRF)におけるその強度は、著しく変化する。この高レベルの変動は、光子が非常にランダムな形態で発生され、そして光子にはそれらの波作用を時間的及び空間的に間隔を取るための除外原理がないために、生じる。この理由で、大きなワードサンプリングが使用される場合には、若干優れた信号対雑音比が得られるだけである。受動的なミリメータ波像形成装置は、シーンからの熱的ノイズを本質的に像形成し、そしてラジオメトリーにおいて良好な信号対雑音比を得るには高周波帯域巾が当然大きくなるので、受信器チャンネルにおけるスペクトル利得も、レーダーの場合より当然著しく高くなる。更に、アレーレイアウトのアーキテクチャーは、ラジオメトリーにおいて広帯域であるので、格子の規則性からの表面モードに対するアレーの感受性は、非常に僅かであり、それ故、異なる設計制約が電子ビーム成形PMMW像形成装置の設計を保持する。
【0066】
ミリメータ波領域でノイズのレベルを増加する照明システムは、受け容れられるコントラストをもつ映像を発生するためにバックグランド放出が不充分である場合には、本発明に使用することができる。1つのこのような照明システムが、参考としてここに援用する特許出願WO2005/096103号に説明されている。
【0067】
本発明の実施形態は、リアルタイムで動作できる。これは、上述した天文学的及び地球観察システムのような相関像形成を使用する他のシステムから本発明を区別化するものである。従来の瞳孔平面受動的像形成は、全て、非リアルタイムである。リアルタイム観点は、式1で与えられる感度を数ケルビン又はそれより良好な値に到達できるように、瞳孔平面における受信器の密度を当然非常に高くしなければならないので、従来技術とは区別される。これは、特に、本発明に独特の問題をもたらす。というのは、高密度の受信器がチャンネル間に相互結合を導入し、校正を必要とするからである。電波天文学の分野では、受信器間の距離が大きいので、それらの間に相互結合は一般的に生じない。
【0068】
加算相関マトリクスは、至近離間された受信器チャンネル間の相互干渉を補償するために電波天文学の分野では未知の更なる処理を要求する。地球観察の分野では、ある程度の結合が存在し、それを校正する試みが提示されているが(例えば、タナーA.B及びスイフトC.Tの“Calibration of a Synthetic Aperture Radiometer”、IEEE Trans. on Geoscience and Remote Sensing、第31巻、第1号、1月(1993年)を参照)、これらアレーの密度は、リアルタイム近視野像形成のためのシステムに比して、依然、低い。本発明の装置を校正する1つの方法は、次の通りである。結合マトリクスを測定し、そして相互結合作用を除去するために加算相関マトリクスにこの関数を乗算させる。この結合マトリクスは、像形成装置の視野における全ボクセルを通して校正ポイントノイズソースを走査し、そして像形成装置の視野の各ポイントに対して加算相関マトリクスを記録することにより、測定することができる。この方法を使用すると、チャンネル間の同時相互結合、個々の受信チャンネルの位相及び振幅応答、並びに遠視野位相補正を校正することができる。数学的には、式8により与えられる近視野における校正された応答は、校正マトリクスである。但し、Ki,jは、加算相関マトリクスであり、そしてci,jは、校正マトリクスである。式8により生じるボクセル放射温度は、実数量であるが、一般的に、加算相関マトリクスは、複素数であるという制約を使用して、校正マトリクスを最適化することができる。式8に関して、近視野放射温度の生成は、式3が解かれる電波天文学の分野とはかなり異なる。
【0069】
又、別の校正技術を使用してもよい。例えば、完全に埋められたアレーに適したレーダーフェーズドアレードメインから、サンプリングされた信号の高速フーリエ変換を行なうことにより瞳孔平面後方散乱信号の映像が処理されて、返送レーダー信号の遠視野映像を生じる。同様に、ビーム成形ラジオメトリーに対して同様の処理を適用することができ、ここでは、相関長さについてのラジオメトリック要件を満足するように注意が払われる。これは、実際に、全数学演算数が少ないので、完全に埋められたアレーに対する方向相関技術を使用するものよりも経済的である。フーリエ変換に密接に関係した変換を使用する後方投影アルゴリズムを使用するような別の処理も、映像の選択された領域しか処理しないという効率的な処理方法を与え、処理ハードウェアを節約することができる。ダーウッドP、フレッチャーP.N、及びヒントンG.Sの“Mutual coupling compensation in small planar array antennas”、IEEE Proc. Microw. Antennas Propag、第145巻、第1号、1998年2月からの数学は、マトリクス解決策を使用することにより、至近離間されたフェーズドアレーレーダー受信器における相互結合をどのように補償できるかを示しており、又、この参照文献には、この方法の成功性も示されている。
【0070】
本発明に対する校正手順は、前記手順に続く工場校正のラインをたどり、これは、受信器の移動や、受信器の位相及び振幅応答の長期間変化を補償するために、オートフォーカス方法を使用する定期的校正で、6ヶ月ごとに繰り返すことができる。オートフォーカスは、近視野における既知の放射源を像形成しながら、校正マトリクスにおける位相及び振幅の増分を最適化する。
【0071】
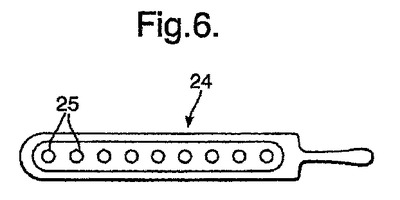
図6は、本発明の第4実施形態を示し、今度は、赤外線波長で動作するものである。下から見て示されたように、杖24は、その長さに沿って直線的に離間配置された複数のセンサ25を有する。各センサ25は、小型の赤外線カメラを備え、その前部にはレンズが取り付けられる。各カメラは、その下の局部エリアから映像を発生する。各カメラからの映像情報は、処理手段により単一の映像へと合成され、この映像は、ここに述べる他の実施形態で示されたように、ディスプレイシステムに表示することができる(例えば、図4の19)。或いは又、合成された映像情報にパターンマッチングアルゴリズムを適用することができ、そして検出されたパターンが当該品目の予想される形状に相関する場合には指示が与えられる。このような指示は、音響、光、振動、又は他の適当な手段の形態をとることができる。又、指示手段は、映像情報が表示されるディスプレイを備え、これは、検出された形状等をハイライトするための増強も含み得る。又、この実施形態は、装置に対する機能を改善するために金属検出器も組み込んでいる。これは、従来の金属検出杖の機能を、本発明の改良された映像能力と共に与える。赤外線センサからの静的映像を積分するための処理手段は、何らかの適当なものでよい。
【0072】
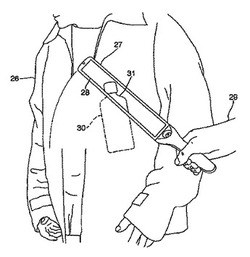
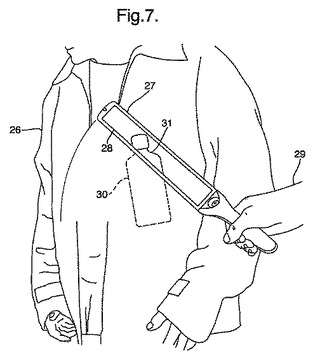
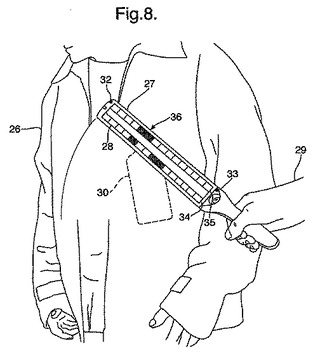
図7は、個人26のセキュリティチェックに使用される本発明の実施形態27のシミュレーションである。使用中に、装置27は、個人26から5cmないし30cmに位置され、身体の周りに揺り動かして、異なる部分から測定を行う。ディスプレイ28は、装置の後部に位置されて、ユーザ29に見える。ディスプレイ28は、アスペクト比が高く、装置27の背面の大部分をカバーする。ディスプレイ28は、像形成装置27の現在位置に関する映像情報だけを実質的に示すようにされる。従って、ユーザは、いつでも、検査されている領域の完全な絵を見ることはない。しかしながら、金属検出杖で現在行なわれるように装置28を動き回らせることにより、ユーザは、装置の下に現在ない領域のメンタル映像を得ることができる。実際に、装置27の移動は、移動によりリフレッシュされる束の間の映像を生成する。図中、個人26に隠されたボトル30が、像形成装置27により部分的に像形成される(31)。像形成装置27をダウン方向に移動すると、ボトル30の異なる部分がディスプレイ28に示される。
【0073】
ディスプレイ28におけるピクセルの数は、装置の検出及び処理部分によって得られる解像度に依存する。解像度の能力が高いほど、映像を表示するのに有用に使用できるピクセルの数が多い。ピクセルは、装置の長さに沿って単一の行に配列される。しかしながら、複数の行を使用して、2つ以上の静的映像からのデータより成る複素映像を同時に表示できるようにするのが効果的である。
【0074】
図8は、間にギャップを伴う2行のピクセル34、35からディスプレイ28作られた実施形態を示す。この構成は、装置により検出される物体の形状をオペレータが見分けられることについて良好な結果を生じるが、コスト効率も良いことが分っている。像形成装置27は、ディスプレイ28の各端に位置された2つの移動センサ32、33を有する。各移動センサ32、33は、ディスプレイ28の各端の移動を検出する。移動検出器32、33からの読みを使用して、測定されるべき最後の静的映像に基づき、及び移動検出器からの測定に従って選択された以前の映像に基づいて、2つの行34、35に複素映像を構築することができる。例えば、像形成装置27の移動が簡単なアップ−ダウン移動であり、像形成装置27が床に平行に保たれる場合には、一方のピクセル行34が最新の静的映像を含み、そして他方の行35が、行34に表示された映像の遅延バージョンを含む。遅延時間は、像形成装置27の移動速度に依存する。より複雑な移動がなされて、一方の移動センサ32が他方のセンサ33より迅速に移動する場合には、1つ以上の行の映像を2つ以上の以前の静的映像からの情報で構成することができる。
【0075】
黒に着色されたピクセル36は、像形成装置27により検出された物体の一部分を表わしている。像形成装置27が移動されるにつれて、見る者の脳は、認知視覚再構成として知られたプロセスにおいて、丁度走査された映像の部分を追加しようとする。この作用の結果として、見る者には、検出された物体の輪郭がはっきりと見える。もちろん、像形成装置27に二次ディスプレイ(図示せず)を使用して、多数の静的映像をコンパイルし、走査されるほとんど又は全部の領域をカバーするより詳細な複素映像を発生することもできる。
【0076】
ディスプレイ28又は二次ディスプレイに表示される映像は、例えば、映像のコントラストを高めるか、又は擬似カラーや縁検出を追加して、弁別性、等を改善できるように、処理手段により向上させることができる。
【0077】
金属検出器は、前記実施形態のいずれにも使用できる。例えば、装置は、その所与の部分に各々関連した複数のセンサを組み込み、各センサは、装置の関連部分の付近で金属物体を検出するようにされる。このように、局部的な金属検出能力が達成される。金属検出器は、他のセンサシステム、即ちミリメータ波センサ又は赤外線センサシステムと協働するようにされ、従って、金属検出器が杖の特定部分の近くで金属物体を検出し、そして他のセンサシステムも、その同じ部分内から強力な信号を受信したときには、他のセンサシステム(ミリメータ波又は赤外線)から杖に得られる表示は、それがおそらく金属であることを指示するように向上することができる。この向上は、カラー、輝度、又は他の適当な手段により行うことができる。
【0078】
本発明は、ラジオメトリック放出に関連した電界をデジタル化して、位相及び振幅情報を捕獲するために、誘電体スラブ物質の検出に特に適している。これは、デジタルフィルタリング技術を使用して、ラジオメトリック放出における周波数構造に関する情報を抽出できるようにする。ラジオメトリック放出に関連した電界がデジタルフォーマットで記憶される場合には、積層材料におけるエタロン作用により生じて「ラジオメトリックキャビティフリンジ(Radiometric Cavity Fringe)」と一般に称される周波数構造を測定することができる。基本的な現象は、誘電体物質の層が放射コヒレンス長さ(式6)より薄いときにはラジオメトリック放出の建設的及び破壊的干渉が生じることである。「ラジオメトリックキャビティフリンジ」の検出は、薄い誘電体スラブ物質を検出する方法として認識されており、その詳細は、特許出願WO2005/093463号に開示されている。本発明のRF、IF又は前検出段階におけるデジタルフィルタリングのパワフルな使用は、位相情報がまだ存在する場合には、隠された物体においてこのような構造を識別するためのパワフルな適応技術を与える。例えば、各周波数について1つづつ、一連の加算相関マトリクスを形成する前に、デジタルフィルタリングを適用し、次いで、後プロセッサを使用してその中の周波数構造を検査することができる。これは、既存のPMMW像形成装置のチャンネルにおけるかさばる固定周波数のアナログフィルタに依存するよりも、非常にパワフルで且つコンパクトな解決策である。
【0079】
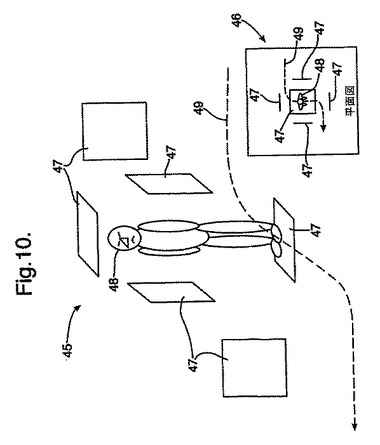
本発明は、門システムに効果的に使用できる。図10は、各々図5に示したものと同様の形式である6個のタイル47を組み込んだ門の斜視図45及び平面図46である。タイル47は、門を通過する物体、この場合は個人48を複数の異なる側から見るように構成される。タイル47は、フラットなものとして示されているが、実際には、カーブしていてもよいし、又は他の便利な形状をとってもよい。カーブしたタイルは、物体を見回すのにより便利であり、物体の異なるビューを与えることができる。著しい曲率が導入された場合には、上述したように、波頭を調整して相関を許し且つ良好な像形成能力を与えるために、デジタル位相補償又は狭帯域デジタルフィルタチャンネル化による時間遅延の合成が必要となる。タイルにより収集されるボクセル情報は、便利な仕方で見るように処理することができる。これは、上述したように、2D映像へと潰してもよいし又は斜視図映像の形態で表示してもよく、これは、対象者48の異なるビューを示すようにオペレータが必要に応じて便利に回転することができる。対象者48が自分の種々のビューを像形成装置へ提示するよう促す対象者経路49を配置して、対象者48の良好なビューを得る機会を最大にすることができる。
【0080】
当業者であれば、本発明の範囲内で他の実施形態が想像されることが明らかであろう。従って、本発明は、ここに述べた実施形態に限定されるものではない。
【図面の簡単な説明】
【0081】
【図1】本発明の実施形態による主要部分のトップレベルブロック図である。
【図2】1Dアレーを有する本発明の第1実施形態を近視野ビームパターンと共に概略的に示す図である。
【図3】第1実施形態を使用して発生できる静的な複素映像情報を概略的に示す図である。
【図4】装置がハンドヘルド構成にされた本発明の第2実施形態を概略的に示す図である。
【図5】2Dアンテナアレーを使用する本発明の第3実施形態を概略的に示すと共に、そこから発生できるシミュレーションされた静的な複素映像を示す図である。
【図6】赤外線波長で動作するセンサを有する本発明の第4実施形態を概略的に示す図である。
【図7】大きな高アスペクト比スクリーンを組み込んだ本発明の実施形態を概略的に示す図で、個人における物体を検出するのに使用される装置を示す図である。
【図8】2つのピクセル行を含むディスプレイを有する本発明の実施形態を概略的に示す図である。
【図9】2D映像の全ピクセルの焦点が合った2D映像を与えるために3Dボクセル表現をどのように潰すかを概略的に示す図である。
【図10】本発明を門に使用したところを概略的に示す図である。
【技術分野】
【0001】
本発明は、受動的像形成及び検出システムに係り、より詳細には、例えば、個人の衣服の下や、梱包又は荷物の中や、床下や、壁の中又は壁の後に視覚的に隠された物体を検出し又は探索するのに使用できるシステムに係る。
【背景技術】
【0002】
人間や物体をサーチして、禁制品やナイフや他の武器のような幾つかの品目、又は盗難品等をチェックすることが頻繁に必要とされることから、迅速且つ効果的なサーチ手順を使用する必要が生じている。現在の手順は、各個人を服の上から身体検査するか、空港やターミナルや競技場のセキュリティ管理エリアに入る各梱包を開くか、又はスポットチェックを行うことを含む。これは、時間がかかり、サーチされる人々を苛立たせ、又、労力を要する。又、小さな物や上手く隠された物は、発見できないことがある。現在、種々の技術が使用されているが、いずれも、効率、認められる安全性又はコストに関して欠点がある。
【0003】
特に空港におけるアーチ道システムの形態の金属検出器は、ある量の金属を所持している個人を識別するのには有用であるが、どんな金属物品か又はその正確な位置に関する指示を与えるものではなく、従って、依然として、警備員が個人の詳細な身体検査を行なうことになる。
【0004】
X線装置は、梱包の検査に一般に使用され、梱包内を目に見えるようにするが、イオン化放射線の使用に関連した実際的な又は認められた健康上の危険性のために、人間や動物のサーチには適していない。更に、少量の原子番号の低い金属の検出や、ある有機及び無機物質の弁別には、X線センサは役立たない。
【0005】
個人のセキュリティスキャニングのために現在追及されている赤外線システムも、この帯域での衣服の透過性が悪いために役立っていない。
【0006】
衣服を通して像形成する能力を発揮するミリメータ波システムは、個人の衣服の下に隠された金属及び非金属の両物体を検出及び探索できるために、最近、受け容れられている。例えば、“Passive Millimeter Wave Imaging Technology IX”Volume 6211, Proc. SPIE, Defense and Security Meeting, Orlando, April (2006)を参照されたい。この能力は、センチメータ帯域(数GHz)から、低テラヘルツ領域をカバーするサブミリメータ波帯域(ここでは、一般的にミリメータ波帯域と称される)まで存在し、能動的及び受動的の両システムを包含する。この帯域にわたる能力の兼ね合いは、低い周波数では、隠れたものの貫通性が高いが、回折制限解像度が悪く、そして帯域の高い端では、その逆になるというものである。又、非金属性物質に対するこの帯域での弁別能力も良好である。例えば、人間の身体を含む多くの有機固体や液体において大きなダイポールモーメントを伴う水の存在のために、多くの符号は、多くの共有結合された無機固体及び液体とは極めて異なり、これは、多くの場合に、セキュリティの脅威に関連付けられる。
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、ミリメータ波像形成システムは、かさばる上に高価であり、しばしば、大きな可動部を有し、これは、この技術の市場での受け容れについて重大な問題である。更に、ある物質を検出するためには、1Kより著しく低いラジオメトリック感度が要求され、これは、既存のPMMW像形成システムに対する現在の課題となっている。現在の像形成システムは、システム感度が典型的に数ケルビンのレベルであり、従って、この重要な市場要件を満足することができない。更に、現在のPMMW像形成技術は近視野で動作するので、視界深度が浅くて、典型的に、数センチメータであり、これは、セキュリティ走査される個人が、像形成される間、ある固定体積の空間内に留まることを要求され、甚だしい動作上の制約となることを意味する。
【0008】
本発明の目的は、上述した従来技術の欠点を克服するか又は少なくとも改善しながら、多数の異なる目的で物体を探索する便利な手段を提供することである。
【課題を解決するための手段】
【0009】
本発明によれば、アレーに配列された複数のアンテナ素子を備え、各アンテナは、ミリメータ又はサブミリメータ波帯域の放射を受け取り且つ受信器システムに接続され、更に、デジタルビーム成形器、プロセッサ及び指示手段も備え、受信器は、ターゲットからラジオメトリック放出を受け取ってデジタル化し、又、前記ビーム成形器は、受信器システムからデジタル情報を受け取ってその情報をプロセッサへ通すようにされた受動的検出装置において、前記ビーム成形器は、更に、前記受け取った情報を処理して、前記アンテナアレーの近視野領域に収束させるようにし、前記プロセッサは、前記ビーム成形器に相互接続されていて、前記装置の少なくとも一次軸にリアルタイム又はほぼリアルタイムで静的映像情報を周期的に発生するようにされ、更に、前記指示手段は、発生された静的映像情報に基づく指示を与えるようにされたことを特徴とする検出装置が提供される。
【0010】
処理された映像情報は、ピクセルの線で構成される一次元(1D)映像、ピクセル又はボクセルの二次元アレーで構成される二次元(2D)映像、或いは三次元ボクセル映像で構成される三次元(3D)映像を含むことができる。
【0011】
このような映像情報は、これを1D、2D又は3Dとすれば、ここでは、静的映像情報として知られている。というのは、装置と対象物との間に相対的な動きがほとんど又は全くない比較的短い時間スパンで得られる映像情報だからである。
【0012】
本発明は、ハンドヘルドポータブル装置として又は固定設置の検出装置として動作するのに便利な装置であって、静止又は移動物体を像形成し、或いは隠された金属及び非金属物体を暴露させる手段をなす装置を提供する。個人のセキュリティ走査については、検出器と個人との間に物理的な接触がなされないので、非侵襲的な身体検査手段をなし、そして梱包については、梱包を開けたり接触したりせずに中身を確認するための手段をなす。例えば、持ち主のいないバッグを片側から走査することができる。
【0013】
この装置は、装置内に形成された映像を表示するためのディスプレイ手段を備えた一体的な指示手段を有する。アンテナ素子は、装置の表面にアレーとして配列されるのが好ましい。アレーは、一次元でも二次元でもよい。装置によって発生された静的映像情報は記録され、そしてポータブル装置の場合には、装置の異なる物理的位置又は配向、その物理的移動及び別の配向から記録された順次の静的映像が合成され、従って、付加的な情報が収集されることにより改善された映像が与えられる。装置と対象物との間の相対的な移動は、良好な映像サンプリングを与えることができる。一次元静的映像の場合には、この相対的な移動は、走査されている物品又は個人の一部分又は全体の映像の別の次元を露呈するように利用できる。装置を門に取り付けるときのように固定設置する場合には、対象物の物理的な移動、例えば、センサを通り越す個人又は梱包の直線又は円形移動により、この付加的な次元又は良好なサンプリングを与えることができる。2つ以上の静的映像から作られたこのような映像は、ここでは、複素映像として知られており、そして複素映像を生成するのに使用される情報は、複素映像情報として知られている。複素映像は、2D又は3D映像でよい。
【0014】
指示手段は、ディスプレイと共に又はそれに代わって、音声発生器、光発生器、振動ユニット、又は他の適当なインジケータを含むことができる。このようなインジケータは、当該物体が検出されると、アクチベートされるように構成される。又、インジケータ手段は、擬似カラー、輪郭、又は検出された物体を容易に識別できるようにする他の処理方法により向上された表示を与えるようにしてもよい。
【0015】
この装置は、次々の周期的に得られる静的映像を複素映像へ合成するプロセスの助けとなるように、装置の1つ以上の部分の移動方向、又は1つ以上の移動度を検出するための手段を組み込んでもよい。
【0016】
それとは別に又はそれに加えて、装置は、異なる静的映像において相関プロセスを使用し、そしてその結果を使用して、複素映像を発生することができる。このようなプロセスは、種々のチャンネルにおける情報の変化率を使用して、装置の移動を推定し、従って、移動により比較的歪められていない複素映像情報を発生することができる。
【0017】
一体的なディスプレイは、装置の位置及び/又は配向に基づいて映像の一部分しか示さないようにされてもよい。表示されるべき映像の部分は、装置の位置及び配向に一致するように配置されるのが好ましい。従って、表示される映像は、装置が移動されるときに変化する複素映像の細い「スライス」のビューのように見える。このように、所与の瞬間に装置の下に何があるか(即ち、装置によって像形成される領域)のビューがディスプレイに現われ、装置が移動されるときに束の間の複素映像を見る者に与える。映像は、所与の瞬間に単一の静的映像を表示する装置の一次軸に沿って配列された1行のピクセルで構成される。或いは又、映像は、2行以上のピクセルで構成されてもよい。各行間にギャップがあってもよい。
【0018】
この装置は、受信アンテナのアレーにより受信された信号を適切に処理することにより映像へと変換できる情報を与える。装置の典型的な寸法や、精密検査されている物体又は個人に対するその接近度により、装置は、アンテナシステムの近視野で像形成することができる。説明上、物品は、最長アパーチャー直線寸法の二乗を動作波長で除算したおおよその値より装置に接近している場合に、近視野にあるとする。
【0019】
受信信号に対する処理は、近視野で動作する場合に、変更形式の相関像形成を含み、変更は、装置が、そのアンテナアレーの近視野領域内から発せられる放射を収束できるようにするものである。
【0020】
又、この装置は、一体化された金属検出機能を組み込むこともできる。金属検出器は、検出された金属性物体を装置の局部領域に関連付けるようにされた複数のセンサを備えているのが好ましい。
【0021】
以下、添付図面を参照して、本発明を一例として詳細に説明する。
【発明を実施するための最良の形態】
【0022】
図1は、装置の重要なコンポーネントを概略的に示す。複数のアンテナ素子1は、一緒に、装置の瞳孔平面アンテナを画成する。各アンテナ1は、デジタル受信器2にリンクされる。アンテナ1及びデジタル受信器2の数は、特定の実施形態の要件に基づいて変化してもよい。デジタル受信器2の出力は、デジタルビーム成形器3に接続され、これは、次いで、プロセッサ4に、次いで、ディスプレイ5又は他の適当な指示手段にリンクされる。「瞳孔平面」アレーという語は、像形成装置の焦点にある焦点平面に対抗して、像形成装置のアパーチャーの平面を指すことに注意されたい。2つの平面における情報は、フーリエ変換により数学的に関係している。フェーズドアレーレーダー及び電波天文学干渉計システムのような無線スペクトルにおける幾つかの形式の受信器は、瞳孔平面受信器を使用し、一方、ほとんど全ての光学像形成システムは、例えば、人間の目のような焦点平面アレー受信器を使用している。
【0023】
図1の受信器区分2は、増幅及びフィルタ段、及びショートワードデジタイザで構成される。この段には検出又は信号平方が存在しない。というのは、ビーム成形器3のために位相情報を得る必要があるからである。図1に示すアーキテクチャーは、ヘテロダインアーキテクチャーを暗黙のうちに含むことはなく、低周波数コンポーネントを使用する便宜上、ヘテロダイン混合マニホールドが付加的に含まれてもよい。これは、システムの各チャンネルにおいてヘテロダインミクサへと分配される単一の局部発振器を使用する。局部発振器の分配における位相項は、以下に述べるように、システム校正段に含まれる。同様に、バンドパスサンプリングがデジタル化に使用され、その後に、デジタルダウン変換に使用されて、同相及び直角位相信号のデジタルサンプルを生成する。
【0024】
図1の各デジタル受信器2に存在するデジタイザは、単にショートワードでよく、即ち良好な映像を生成するのに単一ビットで充分であり、ラジオメトリック強度の絶対レベルに関する情報を保持するのに2ビットが要求され、4ビットワードに対する映像クオリティについては収穫逓減に到達する。ショートワードを使用するサンプリングは、検出前の信号対雑音比が1であるので、ラジオメトリックでしか知覚できず、これは、熱放出の一般的な特性であることが確認される。
【0025】
本発明による装置のラジオメトリック温度感度(本明細書のどこかに示された参照文献LeVineを参照されたい)は、式1により与えられる。但し、TA及びTNは、シーン放射温度及び受信器ノイズ温度であり、BRFは、高周波帯域巾であり、tINTは、特定の積分時間であり、そしてFは、受信アンテナでカバーされるシステムの全アパーチャーの断片である。
【0026】
性能に関して市場の期待を満足できるPMMW像形成システムは、当然、リアルタイムオペレーション(tINT〜40ms)に対して数ケルビン以下のラジオメトリック感度を要求する。従って、最小帯域巾BRFは、数百MHz程度であり、一方、理想的な帯域巾は、20GHzまで上昇し得る。それ故、信号エイリアシングに対するナイキスト制約は、その2倍のサンプル周波数を要求し、ADCの技術に大きな需要を課すが、全ての必要な位相及び振幅情報が記録されることを保証する。このような高速サンプリングは、多くのフィールドプログラマブルゲートアレー(FPGA)デバイスに見られるシリアル入力を使用することによりここに述べる実施形態において新規で且つ経済的な形態で達成することができる。これらのデバイスは、シリアル入力における比較器を単一ビットADCとして使用することで利用されてもよく、これは、現在、10Gspsまでサンプリングする能力を有する。ポテンシャル分割器を通して結合されたこれら入力の対は、高速2ビットADCを構成するのに利用できる。
【0027】
図1の受信器及びアンテナは、異なる偏波を有する信号を独立して処理するようにされる。これは、情報が、例えば、水平及び垂直偏波、又は左側及び右側円偏波に関して収集されるのを許す。二重又は多偏波アンテナが良く知られている。多数の偏波センサを使用することは、付加的な融通性を与え、パワフルな弁別能力を提示し、物質の分類及び識別を行なうための大きな潜在性を許す。これが可能となるのは、異なる材料からの放出及び異なる方向からのビューが、変化する既知の偏波計測符号を有するからである。
【0028】
図2は、本発明の第1の実施形態を示す。図2aに示されたアンテナ素子6の一次元(1D)アレー8は、タイル7の前面に取り付けられている。タイル7は、受信器アレー2及び一次元ビーム成形器3を含み、プロセッサ4及びディスプレイ5にリンクされる(図1に示すように)。アンテナ素子6の1Dアレー8は、装置の軸にあり、そして1Dアレーの各アンテナ素子6は、個別のサブアンテナ素子9で形成することができ、これらは、軸に直交する方向及び距離でビーム10を収束するよう互いに対して固定の仕方で整相され、図2bに示すように、装置の空間的解像度を改善する。それ故、基本的アンテナ6の各々は、他の素子6の他のアンテナパターンとオーバーラップする図3bに示す扇状ビーム12を有し、これは、1Dのデジタルビーム成形器3が軸に沿った次元にビーム成形するのに必要なことである。
【0029】
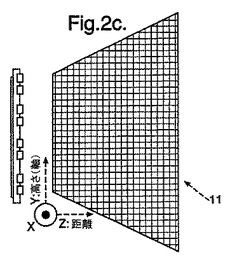
図2cは、アンテナ6によって発生された扇状ビームをどのように処理して、ボクセル11のセットとして指示された距離情報を与えるかを概略的に示す。
【0030】
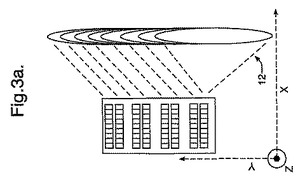
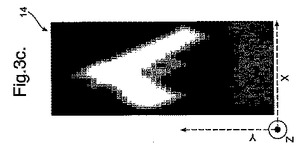
図3は、図3aに示す第1実施形態のオーバーラップする扇状ビーム12が、どのようにして図3bに示す隠された物体の1D静的映像13へとデジタルでビーム成形されるかを示す。図示されたように多数の1D静的映像13を得ることにより、装置がターゲットシーンに対して移動されるときに、2D映像14が図3cに示すように構築される。
【0031】
本発明による装置は、おそらく、近視野で適用するものであり、従って、図2cに示すように、位相シフトにより像形成装置を多数の異なる近視野距離に収束することができる。静的映像を発生するために記録される近フィーリド情報は、当然、装置の軸に沿って且つ距離において次元を有する2Dボクセル素子で構成される。これは、1D映像を与えるように処理することで潰すことができる。或いは又、2Dボクセル情報を、取得した他の2Dボクセルと一緒に記憶して処理することができる。それ故、その後の処理は、対象物の3Dボクセル映像を発生するように行なわれる。3Dボクセル情報は、シーンにおける隠れた物体の空間的位置を決定するように分析されてもよいし、又は処理を通して、オペレータに最良の2D映像を与えるように距離軸において潰されてもよく、この映像では、全ての物体は、近視野距離に関らず、焦点が合っている。
【0032】
第1の実施形態は、装置に一体的なプロセッサ及びディスプレイを組み込むが、それらがリモート位置にあって適当なインターフェイスによりリンクされてもよい。ディスプレイは、装置の使用精度に基づいて1Dでも2Dでもよい。
【0033】
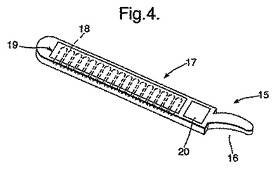
図4は、本発明の第2実施形態を示す。これは、アンテナ素子の1Dアレーを使用するという点では、上述した第1実施形態と原理的に同様であるが、個人や品目を検査するための杖として使用されるポータブル装置とされる。杖15は、取手16、及びアクティブ領域17を備えている。アクティブ領域17は、アンテナ18の直線アレーを下側に組み込んでおり(点線で示す)、そしてアンテナ18からの信号を処理してそれを映像情報へ変換するための電磁回路(図1を参照して述べた)を収容している。アンテナ18のアレーは、図2に示されたアレー8と同様である。映像情報は、ディスプレイ19に表わされると共に、ディスプレイ20にも表わされる。ディスプレイ19は、高アスペクト比のディスプレイスクリーンであり、所与の瞬間にアクティブ領域17の下に何があるかに関する情報を表示するように構成されるが、ディスプレイ20は、杖15が最近スイープされたところのエリアに対応するより完全な映像を示すようにされる。
【0034】
第2実施形態に使用される処理は、第1実施形態に関連して述べたものと同様であるが、受信器は、デジタイザに供給される信号周波数を下げるためにダウンコンバータを組み込んでおり、デジタイザの必要能力を容易にすると共に、そのコストを低減している。
【0035】
アンテナアレー18は、パッチ、ショートホーン又はスロットアンテナ素子のアレーを含むのが好ましいが、当該波長で動作し得る適当なサイズのアンテナ素子を受け容れることができる。アンテナ素子は、杖状の装置を使い易くするために装置に沿って軸方向に配列される。各アンテナ素子は、軸方向に広く且つ横方向に狭い放射ビームパターンを有する。このような構成は、ビーム成形器におけるビーム成形技術を使用して、両軸に狭いビームを発生し、最終映像に満足な解像度を与えることができる。横軸における各アンテナ18の放射パターンは、ガウスパターンに近似し得る。一次元の電子ビーム成形の場合、横方向のビーム成形は、軸方向よりも横方向に利得が高いアンテナの一次元軸方向アレーにより与えられる。電子ビーム成形が機能するためには、アンテナのビームパターンが、図3aに示すように、オーバーラップしなければならない。二次元電子ビーム成形の場合には、アンテナの利得がオーバーラップして電子ビーム成形を可能にするように1つ以上の隣接軸方向アレーが使用される。
【0036】
図4に示す実施形態は、16個のチャンネルを有し、各チャンネルは、個々のアンテナ素子1と、受信器/ダウンコンバータ2とを有する(図1に示すように)。しかしながら、付加的なハードウェアの経費がかかり且つ処理要求が増えるにも関らず、解像度の改善を与えるためには、より多くのチャンネルをもつことが効果的であり、或いは性能要求が軽減される場合には、より少数のチャンネルとされる。
【0037】
各受信チャンネル2は、当該周波数範囲及び帯域巾で動作できるものであれば、適当な受信器でよい。典型的に、本発明のこのような実施形態のRF帯域巾は、約1GHzないし20GHz、例えば、2GHz、又は5GHz、又は10GHzであるが、他の実施形態では、この範囲外の帯域巾を有してもよい。受信器2の典型的なRF動作周波数は、30ないし100GHzの範囲であるが、技術の改良により高い周波数での製造コストが低下され、それに伴い、システムの空間的解像度が高まるにつれて、周波数範囲がアップ方向に拡張する傾向となる。本発明のこの実施形態は、テラヘルツまでの周波数又はそれを越えても、それら周波数で動作できる増幅器、受信器、ダウンコンバータ、等の入手性によっては、有用である。
【0038】
各受信器2は、受信信号を中間周波数(IF)へとダウン変換し、そこで、より便利に処理することができる。局部発振器(LO)信号は、この目的で各受信チャンネルへ供給される。LOは、全ての受信チャンネルにわたって位相コヒレントであるのが好ましい。
【0039】
各受信チャンネル2の出力は、デジタル化システム(図示せず)を使用して、アナログ信号からデジタル信号へ変換される。デジタル化システムは、受信チャンネルごとに単一ビットのアナログ/デジタルコンバータを使用するのが好ましい。これは、適当な信号対雑音比を維持しながらデジタル化システムの出力におけるデータレートを最小にするという効果を有する。便利なことに、フィールドプログラマブルのゲートアレー装置に通常見られるシリアル入力は、非常に高い速度で動作できる単一ビットデジタイザとして使用できる。或いは又、特定用途向け集積回路(ASIC)をシステムに使用して、よりコンパクトなシステム及び/又は低い電力消費を与えることができる。
【0040】
上述した両方の実施形態は、以下に述べる相関像形成ビーム成形技術を利用して、瞳孔平面アンテナの密度に基づき、〜nないしほぼn2個のピクセルより成る静的映像情報を生成し、但し、nはアンテナ素子数である。装置13の横方向移動を使用して、精密検査される物体の異なる部分からの静的映像情報と、上述したように多数の静的映像データを合成することで構築される複素映像とを生成する。
【0041】
図5は、2D瞳孔平面アンテナアレー21を組み込んだ本発明の第3実施形態を示す。このアンテナアレー21は、図示されたようにX軸に複数のアンテナをもつことによって2Dアレーが形成される以外、前記実施形態と各々同様である基本的アンテナで構成される。アレー21の各アンテナは、前記実施形態と同様に、デジタル受信器にリンクされ、受信器は、2Dデジタルビーム成形器に信号供給する。アンテナアレー及びデジタルビーム成形器の次元を1Dから2Dへ拡張することは、瞳孔平面の軸で測定される静的映像情報22の次元も同様に1Dから2Dへ増加されることを意味する。アンテナのビームパターンは、静的映像のサイズが、Y軸に垂直よりも、Y軸においてより大きくなるように、構成することができる。これは、図5bに示すように、それにより得られる2D映像22が細長くなることを意味する。映像サイズは、第1及び第2の実施形態の場合と同様に、X又はY方向における相対的な移動により増加できる。歩道やエスカレータにおける人間の、又はコンベヤベルトにおける物体の自然の移動をこの作用に利用して、図5cにシミュレーションして示すように、より大きくて、より詳細な映像23を発生することができる。
【0042】
この第3実施形態では、壁や、ドアや、セキュリティ走査門エリアのようなフラットなエリアを、これらの瞳孔平面アンテナアレーで二次元においてタイル化して、既存のPMMWセンサに比して足跡サイズを著しく減少したPMMW像形成能力を与えることができる。これらの基本的な構築ブロックは、慣習的な受動的ミリメータ波光学システムに比してアンテナの比較的薄い性質のためにウェハタイルの名前により参照される。このセンサは、近視野で機能するので、瞳孔平面アンテナからの各信号を他の全ての信号と合成することを必要としない。局部的グループが合成され、これは、デジタル形態のデータを有するときには、アナログプロセスよりも困難でない。
【0043】
本発明、及び瞳孔平面アレーの使用は、後方の受信器及び処理ハードウェアを含む装置を、既存のPMMW像形成システムにおいて準光学的像形成するために必要な等価な体積より非常に小さく形成できるようにする。パッチ、スロット又は短い導波管ホーンであるアンテナ、及び受信器だけは、波長厚み程度で作ることができ、これは、現在のかさばるシステムで可能である以上の多数の仕方でシステムを展開できることを意味する。これは、従来の光学的PMMW像形成システムに比して、ほぼ2桁の大きさの体積減少を果たす潜在性を与える。更に、以下に述べるように、近視野に非常に大きな視界深度を与える電子走査システムの能力は、現在のPMMW像形成システムの能力から甚だしい動作上の制限を除去する。更に、瞳孔におけるアンテナの密度は、システムのラジオメトリック感度が幾つかの検出困難な物質の検出要件を満足できるように同調させることができる。これは、瞳孔平面受信システムを、既存の機械的走査システムより著しく敏感にできることを意味する。
【0044】
前記実施形態におけるビーム成形プロセスは、先に引用された「トンプソン」に示されたような電波天文学の分野、及びもっと最近では、地球観察の分野に一般的に使用される相関像形成の変更形態でよく、これについては、LeVine、D.M.及びSwiftの“Synthetic Aperture Radiometers for Microwave Remote Sensing from Space”、0−7803−3068−4/96$5.00(c)1996IEEEを参照されたい。天文学における相関像形成は、明らかに遠視野から得たデータを使用し、そして一般的には、地球の回転を使用してしばしば数千マイル離れて位置された地球ステーションより成る非常に希薄な受信器アレーを使用して実行され、ビジビリティ関数の全空間的周波数にわたり情報をポピュレートする(以下に定義する)。天文学的物体の単一の映像が、何日又は何週間の周期にわたって一般的に累積される。本発明の装置に電波天文学技術を直接適用しても、近視野に対して映像を焦点に形成しないし、充分な感度をもった装置ともならない。電波天文学の形態と本発明の形態との間の更なる相違は、前者が通常数GHzの周波数及び狭い帯域巾に関連し、従って、アナログ技術の使用が依然主流であるのに対して、本発明では、それより高い周波数及び100MHz以上の帯域巾にプライオリティが置かれ、デジタルプロセッサでの機能についてのみ以下に説明する。従って、本発明で述べる映像によりリアルタイム映像又はほぼリアルタイムの映像を近視野に発生できるようにするために、装置及び信号処理の両方を根本的に変更する必要がある。
【0045】
古典的な電波天文学的解決策(例えば、Thompson、A.R.Moran、J.M及びSwenson、G.W.“Interferometry and Synthesis in Radio Astronomy”、第2版、Wiley、(2001年)を参照)では、詳細に述べられたように、二次元空間的周波数スペースにおいて受信器の対により測定された電界の積の複素振幅の累算(積分時間にわたる加算)としてビジビリティ関数が定義される。空間的周波数は、受信器対の分離(ベクトル量)を、放射のない空間波長で除算したものである。電波天文学の言語では、電界のこの乗算は、式5において明らかなように信号の1つにおける相対的な遅延を導入できるので、相関と称される。従って、それにより得られるビジビリティ関数は、遠視野映像の空間的周波数情報を含む二次元マトリクスである。ビジビリティ関数がフーリエ変換されると、遠視野映像を生じさせる。数学的には、これは、式2のように表わされ、ここで、l及びmは、見る方向の方向コサインであり、u及びvは、対応する空間的周波数座標である。既存の発明に適用すると、この処理方法は、単一のビジビリティ関数が近視野映像からの位相情報を破壊するので失敗となり、従って、近視野において収束能力は存在しない。
T(l、m)=FT[V(u、v)] (式2)
【0046】
それ故、相関像形成アルゴリズムは、それが近視野において機能できるよう変更されている。近視野像形成は、本発明を従来技術とは別に設定する態様の1つである。アンテナの近視野とは、物体のポイントとアンテナアパーチャーのポイントとの間の位相差が、アパーチャーにわたる波長の所定の分数より大きく変化する領域として定義される。波長の1/8の場合、これは、近視野の最大範囲RNFを式3で表わされるようにする。但し、Dは、瞳孔平面アパーチャーのサイズであり、λは、放射の自由空間波長である。例えば、94GHzで動作する1mアパーチャーの像形成装置の最大近視野範囲は、〜300mである。
【0047】
明らかに、電波天文学干渉計ビーム成形像形成システムは、近視野では動作しない。アンテナの近視野での動作は、物体と映像空間との間の複雑な位相関係のために光学設計エンジニアに対して特定の課題を提起し、その結果、物体及び映像空間は、もはやフーリエ変換により簡単に関係付けされない。この位相関係は、像形成システムの視野を狭める作用を有する。位相が正確に波長の1/8の場合、視界深度ΔRDOFは、アンテナからの距離Rに対して式4で表わされ、これは、視界深度を、接近した距離においてPMMW像形成装置について数センチメータのみにする。
【0048】
その影響として、多数の焦点平面を使用することが必要となって、非常にコストがかかるか、又は特定の距離において像形成するために単一焦点平面アレーを所与の位置へ移動することが必要となり、他の距離からの潜在的に有用なデータが失われる。しかしながら、本発明は、3Dボクセル映像を発生する目的で近視野における複雑な位相関係を利用し、以下に述べるように近視野距離からのデータが失われることはない。
【0049】
加算相関マトリクスの生成は、n個の受信器からn(n+1)/2個の相関を生成することで達成される。加算相関マトリクスは、当然、位相及び振幅情報を保持するために複素数の量であり、数学的には、式5で表わされる。但し、vは、チャンネルi及びjにおけるラジオメトリックフィールドに対応する電圧であり、又、相対的遅延τは、信号の対間に導入することができ、そして加算は、毎秒25フレームシステムの場合に40msとなる積分時間tINTにわたって行われる。
【0050】
この時間遅延は、信号間の相関が保証されるように、波頭角度を補正するものである。しかしながら、時間遅延は、広い視野の映像を生成するためには必要でなく、瞳孔平面アレーの垂直の軸に対して映像の中心の角度位置をシフトするだけである。この時間遅延をヘテロダインプロセスの後に受信器において電子的に合成すべきである場合に、同時視野及び広帯域巾像形成(式7を参照)を実現化すべきであれば、以下に述べるように、デジタル位相相関を使用してそれを行なうことが必要となる。相関は、全てのチャンネルからのクロス相関及び自己相関の両方を含む。デジタルハードウェアにおいて節約するためには、相関の前にデジタル化のための要件を理解するのが重要である。その要件が良い映像のためのみであって、ラジオメトリック放出の絶対レベルに関する情報を伴わない場合には、加算相関マトリクスにおけるクロス相関だけが要求され、自己相関は、除外される。従って、ラジオメトリック放出のデジタル化は、単一ビットのデジタイザを使用するので充分である。これは、デジタル電子装置アーキテクチャーを著しく簡単化する。或いは又、放射線温度の絶対レベルに関する情報が、例えば、既知の放出レベルを有する物体を弁別する目的で要求される場合には、自己相関情報を加算相関マトリクスに含ませることが必要になる。この場合に、デジタル自己相関は、当然、信号を最小2ビットでサンプリングすることを要求し、さもなければ、相関が常に1となり、平均放出レベルに関する情報が失われることを理解するのが重要である。単一相関マトリクスは、少なくとも各ナイキストサンプル時間において生成されねばならず、この時間は、高周波数帯域巾の2倍の逆数であり、典型的に、数百ピコ秒である。従って、デジタル化電子回路からの信号方向は、デジタル相関器へ直接通される。相関マトリクスは、典型的に40msである映像フレーム時間にわたって一緒に加算され、従って、毎秒25フレームを与える。典型的に、数千万の相関マトリクスを累積して、加算相関マトリクスを生成することが必要になる。
【0051】
加算相関マトリクスは、次いで、多数の近視野映像を生成するための基礎と考えられる。これは、固定距離における単一映像でもよいし、又は像形成装置から異なる距離に各々収束される複数の映像でもよい。加算相関マトリクスは、アレーの前部にレンズを配置する効果を合成するように位相シフトされ、近視野のビジビリティ関数の等効物を生成する。この位相シフトされた相関マトリクスは、次いで、フーリエ変換されて、センサの前部に体積素子ピクセルの線を生成する。これは、像形成装置から特定の距離に一次元近視野映像を構成する。全ての望ましい近視野距離に対応する位相シフトを加算相関マトリクスに次々に適用して、アレーを異なる距離に効果的に収束することができる。1D瞳孔平面アレー及び1Dビーム成形器の場合には、これは、図2cに示すように、距離及び高さの軸(即ち、1Dアレーの軸)を有する2D静的映像を与える。装置の移動、及びそれにより生じる静的映像のその後の結合は、精密検査領域に関する3D映像情報を与える。この3D映像情報は、実際上、個々の「ボクセル」、又は3Dピクセルの情報を含む。2D瞳孔平面アレー及び2Dビーム成形器の場合には、3Dボクセル映像は、静的映像として直接生成される。いずれの場合にも、センサは、校正を要求し、その詳細は、以下で述べる。ここに述べる技術と電波天文学の技術との間の基本的な相違は、ここでは、近視野において、放出が発生した方向を指すだけでは不充分で、3D座標系において像形成装置の前に原点のボクセルも指す必要があることである。
【0052】
この方法の効果は、典型的に数百MHzないしGHzのサンプリング周波数で全てが動作する各近視野距離に対応する一連の全相関マトリクスを必要とする高周波段ではなく、加算相関マトリクスに位相補正を適用できることである。このように位相補正を行なうことは、単一の加算相関マトリクスが存在することを意味し、そして多数の近視野距離に対する位相シフトは、映像フレーム当たり一度、典型的に、40msごとに、適用するだけでよく、これは、ハードウェアをあまり必要とせず、ソフトウェアで容易に行うことができる。
【0053】
前記処理によって得られるボクセル情報は、標準的な映像処理技術を使用して更に処理されて、ナイフ、或いは他の武器又は禁制品のような当該形状を識別することができる。3D映像は、多数の異なる投影から分析でき、脅威を識別する上で助けとなる。
【0054】
ボクセル映像は、三次元を二次元へと潰すように更に処理され、オペレータの解釈を容易にする。オペレータは、物体を検出することしか関心がなく、空の空間や透明な衣服に対応するボクセルは実際上問題としないので、このボクセル映像は、前者を強調するように処理されてもよい。潰すプロセスは、何らかの当該情報が存在する潰される軸において特定のボクセルを選択し、そして当該領域の全てのボクセルに対してこのプロセスを繰り返すことを含む。潰されるべき3D映像を、軸X、Y及びZを有するデータのアレーとしてみなし、潰すプロセスは、平面X、Yにおける各座標に対して、関心があると思われるZ座標のボクセルを選択する。各選択されたZボクセルは、軸X及びYを有する2D映像の一部分を形成する。従って、複素3D表面が有効に2D映像へと潰される。これが図9に示されている。見られるべき物体は、固体円柱37で構成される。瞳孔平面38において左から見た場合に、Z軸において潰されて得られる映像が、有用な映像情報を含むように第1ピクセルを選択することにより、ディスプレイ39に示される。円柱37の細切れ部分が長方形40として像形成される。これは、長方形40の全ての部分に焦点が合わされ、一方、普通のカメラは、瞳孔平面38から異なる距離にあるために円柱の異なる部分に焦点を合わすことができないという点で、普通のカメラで見られるビューとは相違する。所与のX、Y座標に対して2つ以上の当該ボクセルを選択し、そして例えば、2Dコンピュータスクリーンに3Dパースペクティブを使用することにより適当な仕方で表示することができる。例えば、誘電体シートは、部分的に透明であるので、その両側から映像データを与えることができ、従って、それにより得られる映像に両側を表わすことができる。このような物体の相対的な吸収度を示すために陰影を使用してもよい。
【0055】
円柱37の下の瞳孔平面41から円柱37を見ると、X軸において潰されてディスプレイ42に見られる円43が形成される。このビューは、通常のカメラで見られるものと同様である。というのは、瞳孔平面41から円柱37の像形成される部分への全ての距離が同じだからである。
【0056】
ハンドヘルドセンサの場合には、これは、パワフルな実用品である。というのは、センサの視界深度内に対象物があるかどうかオペレータが問題にしなくてよいからであり、即ちセンサを対象物に接近して配置するだけで動作が行われる。門システムについても同様に、対象者がそこを通過するときに対象者の全ての部分におそらく焦点が合わされる。
【0057】
達成できる解像度、即ち個々のボクセルの寸法は、デジタルビーム成形器に使用される位相精度に関係している。例えば、35GHzで見てλ/8の位相精度は、側部ボクセル寸法1mmを生じさせる。これは、細切れ線44により示される。しかしながら、実際には、おそらく達成される実際の空間的解像度は、回折制限のために、この数値とλ/2との間である。実際に、最適なボクセルサイズは、収穫逓減ベースで、得られる空間的解像度と、小さなサイズのボクセルを取り扱うのに利用できる処理パワーとの間の兼ね合いとして選択される。処理パワーの最適化は、放射の放出も散乱もないことが分っている空間に対応するボクセルを、より大きく構成することで、行われてもよい。これがどの領域であるかの情報は、この装置から又は別のセンサから適応式に決定することができる。
【0058】
ボクセル映像は、最も高いコントラストを有する平面区分、又は「空の空間」を含むと考えられない平面区分をハイライト処理する仕方で処理されてもよい。これは、コントラストを最大にする焦点長さを選択することで焦点合わせ動作を実行する自動焦点カメラに類似している。しかしながら、視覚カメラとは異なり、本発明では、近視野空間の異なる領域において多数の異なる距離にある物体は、全て同時に焦点を合わせることができる。実際に、これは、非常に大きな視界深度をもつカメラと同様である。
【0059】
又、映像を潰すことは、静的な映像において行われてもよく、図2cに示された二次元平面映像が一次元の線ピクセル映像へと潰される。一次元の線映像は、次いで、相対的なセンサ−対象物移動を利用して領域にわたって機械的に走査され、二次元映像を形成することができる。
【0060】
平面又は体積にわたり異なる距離に同時に焦点を合わせる能力を利用する更に別の用途は、光学的システムを使用して、多次元映像の軸を潰すところの形状を選択することである。複数のカメラを備えた光学的システムを使用して、個人のような物体を像形成し、そしてその映像を使用して、物体の重要な座標を決定することができる。次いで、本発明による装置で記録された多次元映像を、その決定された座標を使用して物体の周りで潰し、その潰された映像の焦点が物体の表面に対応するようにする。潰される映像は、1Dでも2Dでもよいが、オペレータが解釈するのには2D映像がより便利である。
【0061】
ある意味では、3Dボクセル映像は、立体知覚のより精巧な形態であり、三次元において物体を探索する能力を他のセンサと一緒に使用して、金属検出器又はX線システムからのデータと合成するような相補的な能力を与えることができる。
【0062】
本発明では、信号は、当然、特にPMMW像形成のための従来未認識のパワフルな能力を与えるビーム成形段の前にデジタル化され、主にアナログ技術が使用された電波天文学の古典的分野から区別する。例えば、トンプソンA.R、モランJ.M及びスエンソンG.Wの“Interferometry and Synthesis in Radio Astronomy”、第2版、ウィリー(2001年)を参照されたい。PMMW像形成装置では、同時の広い視野(使用要件)及び広い高周波帯域巾(良好なラジオメトリック感度を与えるための;式1を参照)が要求される。しかしながら、帯域巾BRFを増加すると、式6で表わされるように、放射コヒレンス長さIcが短くなり、但し、cは、光速である。これは、ラジオメトリック放出の相関が保証される視野を制限し、これにより、半角度θ1/2である計器視野を、式7で与えられるものに制限し、但し、Dは、アパーチャーサイズである。しかしながら、帯域巾と視野とのこの見掛け上の相互排他性は、受信器からの信号を、式7を個々に満足する一連の狭帯域チャンネルへとデジタルフィルタリングすることにより検索することができる。これは、かさばるアナログフィルタを使用するのではなく、デジタル技術を使用して非常にコンパクトに行なうことができる。相関プロセスの後に、異なる帯域巾信号を再構成することができる。
【0063】
天文学に使用される従来の処理と本発明との間の更なる相違は、受信器の前端にヘテロダインシフトが使用される場合に、信号分散が導入され、ビーム成形を有効に機能させるにはこれを除去する必要があることである。この除去を行なわないと、像形成装置は、広い高周波帯域巾を伴う狭い視野となるか、又は狭い高周波帯域を伴う広い視野となる。この場合も、相互排他性は、電波天文学では受け容れられるが、PMMW像形成装置では全く受け容れられない。デジタル技術を使用すると、ヘテロダインシフトで誘起される分散は、ラジオメトリック信号のデジタル時間履歴に、周波数に比例する位相シフトを乗算することにより補正することができる。これは、広い周波数範囲にわたってアナログ技術を使用して行なうのが非常に困難である。しかしながら、天文学的信号を処理する従来技術では、取り扱われる帯域巾に限度があるために、アナログ技術も、選択すべき有効な方法である。分散は、ダウン変換中の断片的帯域巾変化として、混合プロセスを通して生じる。分散を有効に除去できるアナログコンポーネントは、まだ見つかっていない。しかしながら、デジタルフィルタは、その分散特性を任意に固定できるので、このタスクに理想的に適している。時間シーケンスに適当なデジタル時間応答を一度乗算すれば充分である。
【0064】
科学の複雑さから、この用途に対するデジタル技術の有益さは、直ちに明らかではない。同じ帯域巾に対して、デジタル技術は、一般的に、アナログ技術よりコストがかかり、かさばるので、これらの複雑な問題を理解しない限り、PMMW像形成装置のアーキテクチャーに対して普通にないステップが取られる。特に、ラジオメトリック感度を達成するための帯域巾についての大きな需要−これは、非常に多数の並列なデータチャンネルが、全て、1GHz以上のクロック速度で動作することを必要とする−に関して、デジタル解決策の有益さと、それにまつわる複雑さとが全く明らかでない。
【0065】
受信モードのみで動作する従来のビーム成形レーダーからの相違は、ノイズの統計値、受信器のアーキテクチャー及び格子ローブ発生が極めて異なることである。フェーズドアレーレーダーでは、充分な信号対雑音比を達成するためにコヒレントな信号を長ワードでサンプリングしなければならないが、電子ビーム成形の受動的なミリメータ波像形成装置は、上述したように、信号積分の前の信号対雑音比が1であるので、単一ビットサンプリングを使用して機能することができる。熱発生放射の性質のために、短い高周波時間スケール(〜1/BRF)におけるその強度は、著しく変化する。この高レベルの変動は、光子が非常にランダムな形態で発生され、そして光子にはそれらの波作用を時間的及び空間的に間隔を取るための除外原理がないために、生じる。この理由で、大きなワードサンプリングが使用される場合には、若干優れた信号対雑音比が得られるだけである。受動的なミリメータ波像形成装置は、シーンからの熱的ノイズを本質的に像形成し、そしてラジオメトリーにおいて良好な信号対雑音比を得るには高周波帯域巾が当然大きくなるので、受信器チャンネルにおけるスペクトル利得も、レーダーの場合より当然著しく高くなる。更に、アレーレイアウトのアーキテクチャーは、ラジオメトリーにおいて広帯域であるので、格子の規則性からの表面モードに対するアレーの感受性は、非常に僅かであり、それ故、異なる設計制約が電子ビーム成形PMMW像形成装置の設計を保持する。
【0066】
ミリメータ波領域でノイズのレベルを増加する照明システムは、受け容れられるコントラストをもつ映像を発生するためにバックグランド放出が不充分である場合には、本発明に使用することができる。1つのこのような照明システムが、参考としてここに援用する特許出願WO2005/096103号に説明されている。
【0067】
本発明の実施形態は、リアルタイムで動作できる。これは、上述した天文学的及び地球観察システムのような相関像形成を使用する他のシステムから本発明を区別化するものである。従来の瞳孔平面受動的像形成は、全て、非リアルタイムである。リアルタイム観点は、式1で与えられる感度を数ケルビン又はそれより良好な値に到達できるように、瞳孔平面における受信器の密度を当然非常に高くしなければならないので、従来技術とは区別される。これは、特に、本発明に独特の問題をもたらす。というのは、高密度の受信器がチャンネル間に相互結合を導入し、校正を必要とするからである。電波天文学の分野では、受信器間の距離が大きいので、それらの間に相互結合は一般的に生じない。
【0068】
加算相関マトリクスは、至近離間された受信器チャンネル間の相互干渉を補償するために電波天文学の分野では未知の更なる処理を要求する。地球観察の分野では、ある程度の結合が存在し、それを校正する試みが提示されているが(例えば、タナーA.B及びスイフトC.Tの“Calibration of a Synthetic Aperture Radiometer”、IEEE Trans. on Geoscience and Remote Sensing、第31巻、第1号、1月(1993年)を参照)、これらアレーの密度は、リアルタイム近視野像形成のためのシステムに比して、依然、低い。本発明の装置を校正する1つの方法は、次の通りである。結合マトリクスを測定し、そして相互結合作用を除去するために加算相関マトリクスにこの関数を乗算させる。この結合マトリクスは、像形成装置の視野における全ボクセルを通して校正ポイントノイズソースを走査し、そして像形成装置の視野の各ポイントに対して加算相関マトリクスを記録することにより、測定することができる。この方法を使用すると、チャンネル間の同時相互結合、個々の受信チャンネルの位相及び振幅応答、並びに遠視野位相補正を校正することができる。数学的には、式8により与えられる近視野における校正された応答は、校正マトリクスである。但し、Ki,jは、加算相関マトリクスであり、そしてci,jは、校正マトリクスである。式8により生じるボクセル放射温度は、実数量であるが、一般的に、加算相関マトリクスは、複素数であるという制約を使用して、校正マトリクスを最適化することができる。式8に関して、近視野放射温度の生成は、式3が解かれる電波天文学の分野とはかなり異なる。
【0069】
又、別の校正技術を使用してもよい。例えば、完全に埋められたアレーに適したレーダーフェーズドアレードメインから、サンプリングされた信号の高速フーリエ変換を行なうことにより瞳孔平面後方散乱信号の映像が処理されて、返送レーダー信号の遠視野映像を生じる。同様に、ビーム成形ラジオメトリーに対して同様の処理を適用することができ、ここでは、相関長さについてのラジオメトリック要件を満足するように注意が払われる。これは、実際に、全数学演算数が少ないので、完全に埋められたアレーに対する方向相関技術を使用するものよりも経済的である。フーリエ変換に密接に関係した変換を使用する後方投影アルゴリズムを使用するような別の処理も、映像の選択された領域しか処理しないという効率的な処理方法を与え、処理ハードウェアを節約することができる。ダーウッドP、フレッチャーP.N、及びヒントンG.Sの“Mutual coupling compensation in small planar array antennas”、IEEE Proc. Microw. Antennas Propag、第145巻、第1号、1998年2月からの数学は、マトリクス解決策を使用することにより、至近離間されたフェーズドアレーレーダー受信器における相互結合をどのように補償できるかを示しており、又、この参照文献には、この方法の成功性も示されている。
【0070】
本発明に対する校正手順は、前記手順に続く工場校正のラインをたどり、これは、受信器の移動や、受信器の位相及び振幅応答の長期間変化を補償するために、オートフォーカス方法を使用する定期的校正で、6ヶ月ごとに繰り返すことができる。オートフォーカスは、近視野における既知の放射源を像形成しながら、校正マトリクスにおける位相及び振幅の増分を最適化する。
【0071】
図6は、本発明の第4実施形態を示し、今度は、赤外線波長で動作するものである。下から見て示されたように、杖24は、その長さに沿って直線的に離間配置された複数のセンサ25を有する。各センサ25は、小型の赤外線カメラを備え、その前部にはレンズが取り付けられる。各カメラは、その下の局部エリアから映像を発生する。各カメラからの映像情報は、処理手段により単一の映像へと合成され、この映像は、ここに述べる他の実施形態で示されたように、ディスプレイシステムに表示することができる(例えば、図4の19)。或いは又、合成された映像情報にパターンマッチングアルゴリズムを適用することができ、そして検出されたパターンが当該品目の予想される形状に相関する場合には指示が与えられる。このような指示は、音響、光、振動、又は他の適当な手段の形態をとることができる。又、指示手段は、映像情報が表示されるディスプレイを備え、これは、検出された形状等をハイライトするための増強も含み得る。又、この実施形態は、装置に対する機能を改善するために金属検出器も組み込んでいる。これは、従来の金属検出杖の機能を、本発明の改良された映像能力と共に与える。赤外線センサからの静的映像を積分するための処理手段は、何らかの適当なものでよい。
【0072】
図7は、個人26のセキュリティチェックに使用される本発明の実施形態27のシミュレーションである。使用中に、装置27は、個人26から5cmないし30cmに位置され、身体の周りに揺り動かして、異なる部分から測定を行う。ディスプレイ28は、装置の後部に位置されて、ユーザ29に見える。ディスプレイ28は、アスペクト比が高く、装置27の背面の大部分をカバーする。ディスプレイ28は、像形成装置27の現在位置に関する映像情報だけを実質的に示すようにされる。従って、ユーザは、いつでも、検査されている領域の完全な絵を見ることはない。しかしながら、金属検出杖で現在行なわれるように装置28を動き回らせることにより、ユーザは、装置の下に現在ない領域のメンタル映像を得ることができる。実際に、装置27の移動は、移動によりリフレッシュされる束の間の映像を生成する。図中、個人26に隠されたボトル30が、像形成装置27により部分的に像形成される(31)。像形成装置27をダウン方向に移動すると、ボトル30の異なる部分がディスプレイ28に示される。
【0073】
ディスプレイ28におけるピクセルの数は、装置の検出及び処理部分によって得られる解像度に依存する。解像度の能力が高いほど、映像を表示するのに有用に使用できるピクセルの数が多い。ピクセルは、装置の長さに沿って単一の行に配列される。しかしながら、複数の行を使用して、2つ以上の静的映像からのデータより成る複素映像を同時に表示できるようにするのが効果的である。
【0074】
図8は、間にギャップを伴う2行のピクセル34、35からディスプレイ28作られた実施形態を示す。この構成は、装置により検出される物体の形状をオペレータが見分けられることについて良好な結果を生じるが、コスト効率も良いことが分っている。像形成装置27は、ディスプレイ28の各端に位置された2つの移動センサ32、33を有する。各移動センサ32、33は、ディスプレイ28の各端の移動を検出する。移動検出器32、33からの読みを使用して、測定されるべき最後の静的映像に基づき、及び移動検出器からの測定に従って選択された以前の映像に基づいて、2つの行34、35に複素映像を構築することができる。例えば、像形成装置27の移動が簡単なアップ−ダウン移動であり、像形成装置27が床に平行に保たれる場合には、一方のピクセル行34が最新の静的映像を含み、そして他方の行35が、行34に表示された映像の遅延バージョンを含む。遅延時間は、像形成装置27の移動速度に依存する。より複雑な移動がなされて、一方の移動センサ32が他方のセンサ33より迅速に移動する場合には、1つ以上の行の映像を2つ以上の以前の静的映像からの情報で構成することができる。
【0075】
黒に着色されたピクセル36は、像形成装置27により検出された物体の一部分を表わしている。像形成装置27が移動されるにつれて、見る者の脳は、認知視覚再構成として知られたプロセスにおいて、丁度走査された映像の部分を追加しようとする。この作用の結果として、見る者には、検出された物体の輪郭がはっきりと見える。もちろん、像形成装置27に二次ディスプレイ(図示せず)を使用して、多数の静的映像をコンパイルし、走査されるほとんど又は全部の領域をカバーするより詳細な複素映像を発生することもできる。
【0076】
ディスプレイ28又は二次ディスプレイに表示される映像は、例えば、映像のコントラストを高めるか、又は擬似カラーや縁検出を追加して、弁別性、等を改善できるように、処理手段により向上させることができる。
【0077】
金属検出器は、前記実施形態のいずれにも使用できる。例えば、装置は、その所与の部分に各々関連した複数のセンサを組み込み、各センサは、装置の関連部分の付近で金属物体を検出するようにされる。このように、局部的な金属検出能力が達成される。金属検出器は、他のセンサシステム、即ちミリメータ波センサ又は赤外線センサシステムと協働するようにされ、従って、金属検出器が杖の特定部分の近くで金属物体を検出し、そして他のセンサシステムも、その同じ部分内から強力な信号を受信したときには、他のセンサシステム(ミリメータ波又は赤外線)から杖に得られる表示は、それがおそらく金属であることを指示するように向上することができる。この向上は、カラー、輝度、又は他の適当な手段により行うことができる。
【0078】
本発明は、ラジオメトリック放出に関連した電界をデジタル化して、位相及び振幅情報を捕獲するために、誘電体スラブ物質の検出に特に適している。これは、デジタルフィルタリング技術を使用して、ラジオメトリック放出における周波数構造に関する情報を抽出できるようにする。ラジオメトリック放出に関連した電界がデジタルフォーマットで記憶される場合には、積層材料におけるエタロン作用により生じて「ラジオメトリックキャビティフリンジ(Radiometric Cavity Fringe)」と一般に称される周波数構造を測定することができる。基本的な現象は、誘電体物質の層が放射コヒレンス長さ(式6)より薄いときにはラジオメトリック放出の建設的及び破壊的干渉が生じることである。「ラジオメトリックキャビティフリンジ」の検出は、薄い誘電体スラブ物質を検出する方法として認識されており、その詳細は、特許出願WO2005/093463号に開示されている。本発明のRF、IF又は前検出段階におけるデジタルフィルタリングのパワフルな使用は、位相情報がまだ存在する場合には、隠された物体においてこのような構造を識別するためのパワフルな適応技術を与える。例えば、各周波数について1つづつ、一連の加算相関マトリクスを形成する前に、デジタルフィルタリングを適用し、次いで、後プロセッサを使用してその中の周波数構造を検査することができる。これは、既存のPMMW像形成装置のチャンネルにおけるかさばる固定周波数のアナログフィルタに依存するよりも、非常にパワフルで且つコンパクトな解決策である。
【0079】
本発明は、門システムに効果的に使用できる。図10は、各々図5に示したものと同様の形式である6個のタイル47を組み込んだ門の斜視図45及び平面図46である。タイル47は、門を通過する物体、この場合は個人48を複数の異なる側から見るように構成される。タイル47は、フラットなものとして示されているが、実際には、カーブしていてもよいし、又は他の便利な形状をとってもよい。カーブしたタイルは、物体を見回すのにより便利であり、物体の異なるビューを与えることができる。著しい曲率が導入された場合には、上述したように、波頭を調整して相関を許し且つ良好な像形成能力を与えるために、デジタル位相補償又は狭帯域デジタルフィルタチャンネル化による時間遅延の合成が必要となる。タイルにより収集されるボクセル情報は、便利な仕方で見るように処理することができる。これは、上述したように、2D映像へと潰してもよいし又は斜視図映像の形態で表示してもよく、これは、対象者48の異なるビューを示すようにオペレータが必要に応じて便利に回転することができる。対象者48が自分の種々のビューを像形成装置へ提示するよう促す対象者経路49を配置して、対象者48の良好なビューを得る機会を最大にすることができる。
【0080】
当業者であれば、本発明の範囲内で他の実施形態が想像されることが明らかであろう。従って、本発明は、ここに述べた実施形態に限定されるものではない。
【図面の簡単な説明】
【0081】
【図1】本発明の実施形態による主要部分のトップレベルブロック図である。
【図2】1Dアレーを有する本発明の第1実施形態を近視野ビームパターンと共に概略的に示す図である。
【図3】第1実施形態を使用して発生できる静的な複素映像情報を概略的に示す図である。
【図4】装置がハンドヘルド構成にされた本発明の第2実施形態を概略的に示す図である。
【図5】2Dアンテナアレーを使用する本発明の第3実施形態を概略的に示すと共に、そこから発生できるシミュレーションされた静的な複素映像を示す図である。
【図6】赤外線波長で動作するセンサを有する本発明の第4実施形態を概略的に示す図である。
【図7】大きな高アスペクト比スクリーンを組み込んだ本発明の実施形態を概略的に示す図で、個人における物体を検出するのに使用される装置を示す図である。
【図8】2つのピクセル行を含むディスプレイを有する本発明の実施形態を概略的に示す図である。
【図9】2D映像の全ピクセルの焦点が合った2D映像を与えるために3Dボクセル表現をどのように潰すかを概略的に示す図である。
【図10】本発明を門に使用したところを概略的に示す図である。
【特許請求の範囲】
【請求項1】
アレーに配列された複数のアンテナ素子を備え、各アンテナは、ミリメータ又はサブミリメータ波帯域の放射を受け取り且つ受信器システムに接続され、更に、デジタルビーム成形器、プロセッサ及び指示手段も備え、受信器は、ターゲットからラジオメトリック放出を受け取ってデジタル化し、前記ビーム成形器は、受信器システムからデジタル情報を受け取ってその情報を前記プロセッサへ通すようにされた受動的検出装置において、
前記ビーム成形器は、更に、前記受け取った情報を処理して、前記アンテナアレーの近視野領域に収束させるようにし、前記プロセッサは、前記ビーム成形器に相互接続されていて、前記装置の少なくとも一次軸にリアルタイム又はほぼリアルタイムで静的映像情報を周期的に発生するようにされ、更に、前記指示手段は、前記発生された静的映像情報に基づく指示を与えるようにされたことを特徴とする検出装置。
【請求項2】
前記デジタルビーム成形器は、位相情報を処理して前記アンテナアレーの近視野に収束できるようにする相関像形成アルゴリズムを利用する、請求項1に記載の検出装置。
【請求項3】
前記ビーム成形器は、前記受け取った情報を処理して、複数の距離に収束させると共に、その複数の距離に関する情報を前記プロセッサへ通すようにされた、請求項1に記載の検出装置。
【請求項4】
前記アンテナアレーは、軸xにおける一次元(1D)アレーを含み、前記プロセッサは、各アンテナ素子に対して収集された距離情報からアレー(x、z)における二次元(2D)ボクセル情報を発生するようにされた、請求項3に記載の検出装置。
【請求項5】
前記アンテナアレーは、軸x、yにおける二次元(2D)アレーを含み、前記プロセッサは、各アンテナ素子に対して収集された距離情報からアレー(x、y、z)における三次元(3D)ボクセル情報を発生するようにされた、請求項3に記載の検出装置。
【請求項6】
前記プロセッサは、x軸におけるアレーの各素子に対し、他の距離素子に比して著しいコントラストを有すると考えられる少なくとも1つのボクセルに対応する少なくとも1つの距離素子が選択されるようにアレー情報を処理し、そして前記選択された距離素子に基づいて映像を発生するようにされた、請求項4に記載の検出装置。
【請求項7】
前記プロセッサは、x軸及びy軸の両方におけるアレーの各素子に対し、他の距離素子に比して著しいコントラストを有すると考えられる少なくとも1つのボクセルに対応する少なくとも1つの距離素子が選択されるようにアレー情報を処理し、そして前記選択された距離素子に基づいて映像を発生するようにされた、請求項5に記載の検出装置。
【請求項8】
前記装置は、ハンドヘルドであるようにされた、請求項1ないし7のいずれかに記載の検出装置。
【請求項9】
前記装置は、前記装置と、像形成される対象物との間の相対的な移動を検出するための手段を含む、請求項8に記載の検出装置。
【請求項10】
前記移動検出手段は、前記装置の2つの異なる部分の移動を個別に検出するようにされた、請求項9に記載の検出装置。
【請求項11】
前記映像情報は、杖の検出された移動と同期して発生されるように構成された、請求項9に記載の検出装置。
【請求項12】
前記指示手段は、前記装置の至近領域からの映像情報で主として構成された映像を表示するディスプレイを備えた、請求項1ないし11のいずれかに記載の検出装置。
【請求項13】
前記指示手段は、複数の静的映像から形成された複素映像情報で構成された映像を表示するディスプレイを備えた、請求項1ないし12のいずれかに記載の検出装置。
【請求項14】
前記ディスプレイは、少なくとも2行のピクセルを備え、更に、前記ディスプレイは、最近取得された静的情報及び1つ以上の古い映像から得られた複素映像情報を示すようにされ、表示されるべき映像情報は、杖の移動を検出する手段からの情報を使用して決定される、請求項9、12又は13に記載の検出装置。
【請求項15】
前記装置は、更に、金属検出器を含む、請求項1ないし14に記載の検出装置。
【請求項16】
前記金属検出器は、検出された金属性物体を前記装置の局部領域に関連付けるようにされた、請求項15に記載の検出装置。
【請求項17】
前記装置は、前記局部領域に関連付けられた映像情報を、金属性物体の考えられる存在を指示するように適応させる、請求項12、13又は16に記載の検出装置。
【請求項18】
個々の受信チャンネルの振幅及び位相応答、並びにそれらチャンネル間の相互結合を測定し、そしてビーム成形時にそれらの測定を使用するようにされた校正手段が組み込まれた、請求項1ないし17のいずれかに記載の検出装置。
【請求項19】
像形成されるシーンを照明するための照明手段が使用され、この照明手段は、熱的に発生されるラジオメトリックノイズの特性を有するようにされた、請求項1ないし18のいずれかに記載の検出装置。
【請求項20】
前記プロセッサは、ビーム成形器の出力をフィルタリングして、複数の個別の狭帯域巾で映像情報を与えるようにされた、請求項1ないし19のいずれかに記載の検出装置。
【請求項21】
前記装置は、少なくとも2つの個別偏波の放射を受け取り、各偏波に関する信号を別々にデジタル化するようにされた、請求項1ないし20のいずれかに記載の検出装置。
【請求項1】
アレーに配列された複数のアンテナ素子を備え、各アンテナは、ミリメータ又はサブミリメータ波帯域の放射を受け取り且つ受信器システムに接続され、更に、デジタルビーム成形器、プロセッサ及び指示手段も備え、受信器は、ターゲットからラジオメトリック放出を受け取ってデジタル化し、前記ビーム成形器は、受信器システムからデジタル情報を受け取ってその情報を前記プロセッサへ通すようにされた受動的検出装置において、
前記ビーム成形器は、更に、前記受け取った情報を処理して、前記アンテナアレーの近視野領域に収束させるようにし、前記プロセッサは、前記ビーム成形器に相互接続されていて、前記装置の少なくとも一次軸にリアルタイム又はほぼリアルタイムで静的映像情報を周期的に発生するようにされ、更に、前記指示手段は、前記発生された静的映像情報に基づく指示を与えるようにされたことを特徴とする検出装置。
【請求項2】
前記デジタルビーム成形器は、位相情報を処理して前記アンテナアレーの近視野に収束できるようにする相関像形成アルゴリズムを利用する、請求項1に記載の検出装置。
【請求項3】
前記ビーム成形器は、前記受け取った情報を処理して、複数の距離に収束させると共に、その複数の距離に関する情報を前記プロセッサへ通すようにされた、請求項1に記載の検出装置。
【請求項4】
前記アンテナアレーは、軸xにおける一次元(1D)アレーを含み、前記プロセッサは、各アンテナ素子に対して収集された距離情報からアレー(x、z)における二次元(2D)ボクセル情報を発生するようにされた、請求項3に記載の検出装置。
【請求項5】
前記アンテナアレーは、軸x、yにおける二次元(2D)アレーを含み、前記プロセッサは、各アンテナ素子に対して収集された距離情報からアレー(x、y、z)における三次元(3D)ボクセル情報を発生するようにされた、請求項3に記載の検出装置。
【請求項6】
前記プロセッサは、x軸におけるアレーの各素子に対し、他の距離素子に比して著しいコントラストを有すると考えられる少なくとも1つのボクセルに対応する少なくとも1つの距離素子が選択されるようにアレー情報を処理し、そして前記選択された距離素子に基づいて映像を発生するようにされた、請求項4に記載の検出装置。
【請求項7】
前記プロセッサは、x軸及びy軸の両方におけるアレーの各素子に対し、他の距離素子に比して著しいコントラストを有すると考えられる少なくとも1つのボクセルに対応する少なくとも1つの距離素子が選択されるようにアレー情報を処理し、そして前記選択された距離素子に基づいて映像を発生するようにされた、請求項5に記載の検出装置。
【請求項8】
前記装置は、ハンドヘルドであるようにされた、請求項1ないし7のいずれかに記載の検出装置。
【請求項9】
前記装置は、前記装置と、像形成される対象物との間の相対的な移動を検出するための手段を含む、請求項8に記載の検出装置。
【請求項10】
前記移動検出手段は、前記装置の2つの異なる部分の移動を個別に検出するようにされた、請求項9に記載の検出装置。
【請求項11】
前記映像情報は、杖の検出された移動と同期して発生されるように構成された、請求項9に記載の検出装置。
【請求項12】
前記指示手段は、前記装置の至近領域からの映像情報で主として構成された映像を表示するディスプレイを備えた、請求項1ないし11のいずれかに記載の検出装置。
【請求項13】
前記指示手段は、複数の静的映像から形成された複素映像情報で構成された映像を表示するディスプレイを備えた、請求項1ないし12のいずれかに記載の検出装置。
【請求項14】
前記ディスプレイは、少なくとも2行のピクセルを備え、更に、前記ディスプレイは、最近取得された静的情報及び1つ以上の古い映像から得られた複素映像情報を示すようにされ、表示されるべき映像情報は、杖の移動を検出する手段からの情報を使用して決定される、請求項9、12又は13に記載の検出装置。
【請求項15】
前記装置は、更に、金属検出器を含む、請求項1ないし14に記載の検出装置。
【請求項16】
前記金属検出器は、検出された金属性物体を前記装置の局部領域に関連付けるようにされた、請求項15に記載の検出装置。
【請求項17】
前記装置は、前記局部領域に関連付けられた映像情報を、金属性物体の考えられる存在を指示するように適応させる、請求項12、13又は16に記載の検出装置。
【請求項18】
個々の受信チャンネルの振幅及び位相応答、並びにそれらチャンネル間の相互結合を測定し、そしてビーム成形時にそれらの測定を使用するようにされた校正手段が組み込まれた、請求項1ないし17のいずれかに記載の検出装置。
【請求項19】
像形成されるシーンを照明するための照明手段が使用され、この照明手段は、熱的に発生されるラジオメトリックノイズの特性を有するようにされた、請求項1ないし18のいずれかに記載の検出装置。
【請求項20】
前記プロセッサは、ビーム成形器の出力をフィルタリングして、複数の個別の狭帯域巾で映像情報を与えるようにされた、請求項1ないし19のいずれかに記載の検出装置。
【請求項21】
前記装置は、少なくとも2つの個別偏波の放射を受け取り、各偏波に関する信号を別々にデジタル化するようにされた、請求項1ないし20のいずれかに記載の検出装置。
【図1】

【図2a】
【図2b】
【図2c】
【図3a】
【図3b】

【図3c】
【図4】
【図5a】
【図5b】

【図5c】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2a】
【図2b】
【図2c】
【図3a】
【図3b】
【図3c】
【図4】
【図5a】
【図5b】
【図5c】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2009−519436(P2009−519436A)
【公表日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2008−539490(P2008−539490)
【出願日】平成18年11月8日(2006.11.8)
【国際出願番号】PCT/GB2006/004168
【国際公開番号】WO2007/054685
【国際公開日】平成19年5月18日(2007.5.18)
【出願人】(501297550)キネティック リミテッド (57)
【Fターム(参考)】
【公表日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成18年11月8日(2006.11.8)
【国際出願番号】PCT/GB2006/004168
【国際公開番号】WO2007/054685
【国際公開日】平成19年5月18日(2007.5.18)
【出願人】(501297550)キネティック リミテッド (57)
【Fターム(参考)】
[ Back to top ]