
受渡し装置
【課題】 ナットを締付装置のソケットに確実に位相合せして挿入するナット受渡し装置を提供する。
【解決手段】 ナット16が供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。このためには、雌テーパ面17の垂直方向に対する角度は14°以下とする。角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を合せることができる。
【解決手段】 ナット16が供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。このためには、雌テーパ面17の垂直方向に対する角度は14°以下とする。角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を合せることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、締付装置のソケットにナット(一般的なナットの他の締付部材も含む)を受け渡すための装置に関する。
【背景技術】
【0002】
自動車組立ラインの一部ではロボットを用いて車体にタイヤを自動的に組み付ける作業が行われている。前記ロボットには通常、タイヤを把持するタイヤ把持部と、車体側のハブに設けられているハブボルトにナットを締め付けるための締付装置とを備えている。
【0003】
締付装置はソケット内にナットを保持した状態で回転することでナットをボルトに締め付ける。このためソケットにナットをセットする作業が必要になるが、この作業を自動的に行う先行技術として特許文献1がある。
【0004】
特許文献1には5本の締付装置のソケットのそれぞれにナットを同時にセットする内容が開示されている。具体的には、板状をなすナット受け手段の上面に同一円周上に等角度間隔で5本のロッドを立設し、これらロッドにナットのネジ穴を挿入し、この状態で、上方から締付装置のソケットをゆっくり回転させながら下降することで、ナットとソケットの位相を合せつつナットをソケット内に入れ込み、ソケット内のマグネットでナットを吸着保持するようにしている。
【0005】
上記特許文献1では、ナットの受け取り不良が生じることを予定し、このような場合は、ナット受け手段を回転させて上下反転せしめ、ナット受け手段上にセットされたナットを受け台内に払い出すようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−210824号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ナットの受け取り不良の原因としては、ナットとソケットの位相が合わない場合が最も多い。ソケットはゆっくり回転しながら下降してくるため、ナットとソケットの位相が合わない場合でも、ナットにソケットが当接した後スプリングに抗してソケットが相対的に後退、即ちナットにソケットが当接したまま回転する間にナットとソケットの位相が合致し、自動的にスプリングの弾発力でソケットはナットを抱持する筈であるが、ナットにソケットが当接した状態で、ナットとソケットとの当接面の摩擦抵抗がナットとナットセット面との摩擦抵抗より大きいと、ナットはソケットとともに供回りしてしまう。
【0008】
その結果、所定時間内にナットをソケット内に保持することができなくなり、ナット受け手段を上下反転させるなどして、再度セットしなければならない。
【課題を解決するための手段】
【0009】
上記課題を解決するため本発明に係るナット受渡し装置は、受渡し板の上面にナットなどの締付部材を個別にセットするセット台が設けられ、このセット台には上方に向かって拡がる雌テーパ面が形成された構成とした。
【0010】
複数本の締付装置のソケットに同時にナットなどの締付部材をセットするには同数のセット台を同一円周上に等角度離間して配置する。
【0011】
前記テーパの角度について、実際に実験した結果、垂直軸に対して14°以下にすると、締付部材とソケットとの当接面の摩擦抵抗が締付部材とナットセット面との摩擦抵抗より小さくなり、供回りを確実に防止することができた。
【発明の効果】
【0012】
本発明によれば、締付装置のソケットとセットされたナットなどの締付部材との位相がずれている場合でも、締付装置のソケットと締付部材とが供回りすることを防ぐことができる。
【0013】
その結果、ナットなどの締付部材のセットのし直し回数が減り、自動締付作業が効率よく行われる。
【図面の簡単な説明】
【0014】
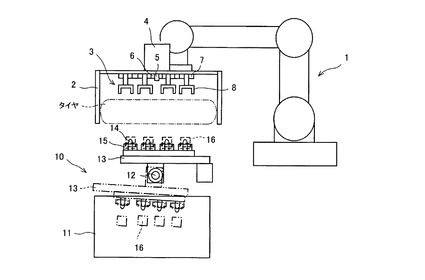
【図1】本発明に係るナット受渡し装置と締付装置を備えた装置を示す図
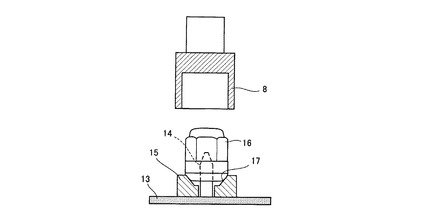
【図2】締付装置のソケットとナットとの関係を示す図
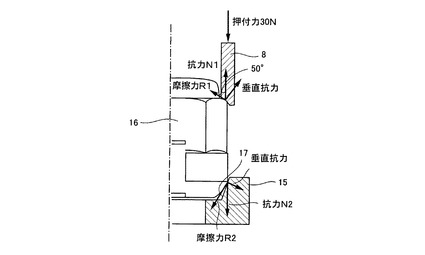
【図3】ナットに作用する摩擦力を説明した図
【発明を実施するための形態】
【0015】
以下に本発明の実施の形態を添付図面に基づいて説明する。
ロボット1は複数のアームからなる多関節ロボットであり、アームの先端にはタイヤ把持治具2を備え、このタイヤ把持治具2の内方に締付装置3が配置されている。
【0016】
締付装置3はタイヤ把持治具2の背面側に設けたサーボモータ4によって主軸5が回転せしめられ、この主軸5の回転がサンギヤ6に伝達され、サンギヤ6の回転が複数の遊星ギヤ7を介してソケット8に伝達される。一般的なタイヤ組付けに用いられる締付装置3にあっては、4個又は5個のソケット8を同一円周上に等角度離して配置している。
【0017】
一方、ナット受渡し装置10は回収ボックス11上に水平軸12を中心として上下反転可能な受渡し板13を設け、この受渡し板13の上面の同一円周上に等角度離間して4本又は5本のピン14を固着し、各ピン14の周囲に環状のセット台15を設けている。
【0018】
前記ピン14はナット16のネジ穴を挿通するため、ネジ穴よりも小径のものを選択する。またセット台15はピン14との間にガタがないようにするため、セット台15の中心穴の径はピン14の外径と略等しくする。
【0019】
前記セット台15の上面には雌テーパ面17が形成され、ナット16のネジ穴をピン14に挿通してセットした場合に、ナット16の下面の一部が前記雌テーパ面17に接触する。
【0020】
自動車のハブにタイヤを取り付けるには、先ずロボット1の締付装置3の各ソケット8にナット16をナット受渡し装置10から受け取る。次いで、ロボット1のタイヤ把持治具2でタイヤを把持し、そのままアームを移動してタイヤホイールにハブボルトを挿通させ、この状態のハブボルト先端にナットを締め付ける。
【0021】
前記各ソケット8がナット受渡し装置10からナット16を受け取る工程では、図2に示すようにセット台15上にセットされているナット16に向かって、ソケット8がゆっくり回転しながら下降する。そして、ソケット8の下端がナット16に当接する。このときソケット8の内穴(六角穴)とナット16の位相が合致していれば、ナット16はそのままソケット8内に進入する。
【0022】
一方、ソケット8の内穴(六角穴)とナット16の位相が合致していない場合には、ナット16とセット台15との接触部の摩擦抵抗によりナット16は回転せずにソケット8は回転を継続する。
【0023】
尚、ソケット8は図示しないスプリングによって突出方向(図2において下方)に付勢されているため、ナット16に当接しても、ソケット8の下端とナット16とは弾性的な接触状態を維持する。
【0024】
そして、位相が合致していない場合にソケット8の回転を継続して行くと、位相が合致する。そしてこのときナット16はソケット8内に進入する。
【0025】
上記のようにしてソケット8が回転してナット16との位相を合致せしめるには、ソケット8がナット16に当接した後に、ナット16がソケット8と供回りしないことが条件になる。
【0026】
供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。
【0027】
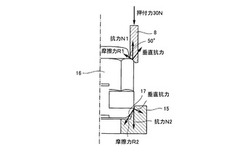
上記の内容を図3を参考にして更に具体的に述べると、一般にソケットが当接するナット16の肩部の角度は50°、摩擦係数はμは一定、押付力N1=N2=30N(ニュートン)とすると、
摩擦抵抗R1=30N×cos50°=19.3N
供回りを確実に防止するには、R2≧1.5R1≒29N
R2≧29Nとなる雌テーパ面17の垂直方向に対する角度は14°以下である。
【0028】
以上のように垂直方向に対する角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を自動的に合せることができる。
【産業上の利用可能性】
【0029】
本発明に係るナット受渡し装置は、例えば自動車のタイヤ組み付け工程においてロボットにナットを自動的に受け渡す際に利用される。
【符号の説明】
【0030】
1…ロボット、2…タイヤ把持治具、3…締付装置、4…サーボモータ、5…主軸、6…サンギヤ、7…遊星ギヤ、8…ソケット、10…ナット受渡し装置、11…回収ボックス、12…水平軸、13…受渡し板、14…ピン、15…セット台、16…ナット、17…雌テーパ面。
【技術分野】
【0001】
本発明は、締付装置のソケットにナット(一般的なナットの他の締付部材も含む)を受け渡すための装置に関する。
【背景技術】
【0002】
自動車組立ラインの一部ではロボットを用いて車体にタイヤを自動的に組み付ける作業が行われている。前記ロボットには通常、タイヤを把持するタイヤ把持部と、車体側のハブに設けられているハブボルトにナットを締め付けるための締付装置とを備えている。
【0003】
締付装置はソケット内にナットを保持した状態で回転することでナットをボルトに締め付ける。このためソケットにナットをセットする作業が必要になるが、この作業を自動的に行う先行技術として特許文献1がある。
【0004】
特許文献1には5本の締付装置のソケットのそれぞれにナットを同時にセットする内容が開示されている。具体的には、板状をなすナット受け手段の上面に同一円周上に等角度間隔で5本のロッドを立設し、これらロッドにナットのネジ穴を挿入し、この状態で、上方から締付装置のソケットをゆっくり回転させながら下降することで、ナットとソケットの位相を合せつつナットをソケット内に入れ込み、ソケット内のマグネットでナットを吸着保持するようにしている。
【0005】
上記特許文献1では、ナットの受け取り不良が生じることを予定し、このような場合は、ナット受け手段を回転させて上下反転せしめ、ナット受け手段上にセットされたナットを受け台内に払い出すようにしている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2000−210824号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ナットの受け取り不良の原因としては、ナットとソケットの位相が合わない場合が最も多い。ソケットはゆっくり回転しながら下降してくるため、ナットとソケットの位相が合わない場合でも、ナットにソケットが当接した後スプリングに抗してソケットが相対的に後退、即ちナットにソケットが当接したまま回転する間にナットとソケットの位相が合致し、自動的にスプリングの弾発力でソケットはナットを抱持する筈であるが、ナットにソケットが当接した状態で、ナットとソケットとの当接面の摩擦抵抗がナットとナットセット面との摩擦抵抗より大きいと、ナットはソケットとともに供回りしてしまう。
【0008】
その結果、所定時間内にナットをソケット内に保持することができなくなり、ナット受け手段を上下反転させるなどして、再度セットしなければならない。
【課題を解決するための手段】
【0009】
上記課題を解決するため本発明に係るナット受渡し装置は、受渡し板の上面にナットなどの締付部材を個別にセットするセット台が設けられ、このセット台には上方に向かって拡がる雌テーパ面が形成された構成とした。
【0010】
複数本の締付装置のソケットに同時にナットなどの締付部材をセットするには同数のセット台を同一円周上に等角度離間して配置する。
【0011】
前記テーパの角度について、実際に実験した結果、垂直軸に対して14°以下にすると、締付部材とソケットとの当接面の摩擦抵抗が締付部材とナットセット面との摩擦抵抗より小さくなり、供回りを確実に防止することができた。
【発明の効果】
【0012】
本発明によれば、締付装置のソケットとセットされたナットなどの締付部材との位相がずれている場合でも、締付装置のソケットと締付部材とが供回りすることを防ぐことができる。
【0013】
その結果、ナットなどの締付部材のセットのし直し回数が減り、自動締付作業が効率よく行われる。
【図面の簡単な説明】
【0014】
【図1】本発明に係るナット受渡し装置と締付装置を備えた装置を示す図
【図2】締付装置のソケットとナットとの関係を示す図
【図3】ナットに作用する摩擦力を説明した図
【発明を実施するための形態】
【0015】
以下に本発明の実施の形態を添付図面に基づいて説明する。
ロボット1は複数のアームからなる多関節ロボットであり、アームの先端にはタイヤ把持治具2を備え、このタイヤ把持治具2の内方に締付装置3が配置されている。
【0016】
締付装置3はタイヤ把持治具2の背面側に設けたサーボモータ4によって主軸5が回転せしめられ、この主軸5の回転がサンギヤ6に伝達され、サンギヤ6の回転が複数の遊星ギヤ7を介してソケット8に伝達される。一般的なタイヤ組付けに用いられる締付装置3にあっては、4個又は5個のソケット8を同一円周上に等角度離して配置している。
【0017】
一方、ナット受渡し装置10は回収ボックス11上に水平軸12を中心として上下反転可能な受渡し板13を設け、この受渡し板13の上面の同一円周上に等角度離間して4本又は5本のピン14を固着し、各ピン14の周囲に環状のセット台15を設けている。
【0018】
前記ピン14はナット16のネジ穴を挿通するため、ネジ穴よりも小径のものを選択する。またセット台15はピン14との間にガタがないようにするため、セット台15の中心穴の径はピン14の外径と略等しくする。
【0019】
前記セット台15の上面には雌テーパ面17が形成され、ナット16のネジ穴をピン14に挿通してセットした場合に、ナット16の下面の一部が前記雌テーパ面17に接触する。
【0020】
自動車のハブにタイヤを取り付けるには、先ずロボット1の締付装置3の各ソケット8にナット16をナット受渡し装置10から受け取る。次いで、ロボット1のタイヤ把持治具2でタイヤを把持し、そのままアームを移動してタイヤホイールにハブボルトを挿通させ、この状態のハブボルト先端にナットを締め付ける。
【0021】
前記各ソケット8がナット受渡し装置10からナット16を受け取る工程では、図2に示すようにセット台15上にセットされているナット16に向かって、ソケット8がゆっくり回転しながら下降する。そして、ソケット8の下端がナット16に当接する。このときソケット8の内穴(六角穴)とナット16の位相が合致していれば、ナット16はそのままソケット8内に進入する。
【0022】
一方、ソケット8の内穴(六角穴)とナット16の位相が合致していない場合には、ナット16とセット台15との接触部の摩擦抵抗によりナット16は回転せずにソケット8は回転を継続する。
【0023】
尚、ソケット8は図示しないスプリングによって突出方向(図2において下方)に付勢されているため、ナット16に当接しても、ソケット8の下端とナット16とは弾性的な接触状態を維持する。
【0024】
そして、位相が合致していない場合にソケット8の回転を継続して行くと、位相が合致する。そしてこのときナット16はソケット8内に進入する。
【0025】
上記のようにしてソケット8が回転してナット16との位相を合致せしめるには、ソケット8がナット16に当接した後に、ナット16がソケット8と供回りしないことが条件になる。
【0026】
供回りしないためには、ソケット8とナット16との接触部の摩擦抵抗R1よりもナット16とセット台15との接触部の摩擦抵抗R2の方が大きいことが必要である。
【0027】
上記の内容を図3を参考にして更に具体的に述べると、一般にソケットが当接するナット16の肩部の角度は50°、摩擦係数はμは一定、押付力N1=N2=30N(ニュートン)とすると、
摩擦抵抗R1=30N×cos50°=19.3N
供回りを確実に防止するには、R2≧1.5R1≒29N
R2≧29Nとなる雌テーパ面17の垂直方向に対する角度は14°以下である。
【0028】
以上のように垂直方向に対する角度が14°以下の雌テーパ面17とすることで、ソケットの下端がナットに当接してもナットがソケットと供回りすることがなく、確実に位相を自動的に合せることができる。
【産業上の利用可能性】
【0029】
本発明に係るナット受渡し装置は、例えば自動車のタイヤ組み付け工程においてロボットにナットを自動的に受け渡す際に利用される。
【符号の説明】
【0030】
1…ロボット、2…タイヤ把持治具、3…締付装置、4…サーボモータ、5…主軸、6…サンギヤ、7…遊星ギヤ、8…ソケット、10…ナット受渡し装置、11…回収ボックス、12…水平軸、13…受渡し板、14…ピン、15…セット台、16…ナット、17…雌テーパ面。
【特許請求の範囲】
【請求項1】
締付装置のソケットにナットなどの締付部材を受け渡す受渡し装置において、この受渡し装置は受渡し板の上面にナットなどの締付部材を個別にセットするセット台が設けられ、このセット台には上方に向かって拡がる雌テーパ面が形成されていることを特徴とする受渡し装置。
【請求項2】
請求項1に記載の受渡し装置において、前記雌テーパ面の垂直軸に対する角度は14°以下であることを特徴とする受渡し装置。
【請求項1】
締付装置のソケットにナットなどの締付部材を受け渡す受渡し装置において、この受渡し装置は受渡し板の上面にナットなどの締付部材を個別にセットするセット台が設けられ、このセット台には上方に向かって拡がる雌テーパ面が形成されていることを特徴とする受渡し装置。
【請求項2】
請求項1に記載の受渡し装置において、前記雌テーパ面の垂直軸に対する角度は14°以下であることを特徴とする受渡し装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−5594(P2011−5594A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−151686(P2009−151686)
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月26日(2009.6.26)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]