
受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法
【課題】低倍観察において受精卵を高速且つ頑健に認識する手段を提供する。
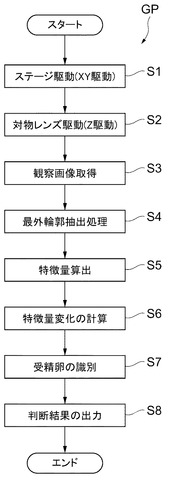
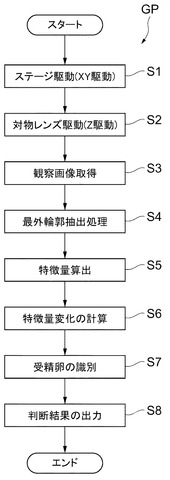
【解決手段】受精卵観察の画像処理プログラムGPは、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得するステップS3と、観察画像に写し込まれた複数の物体を抽出するステップS4と、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップS5と、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップS6,S7と、物体に対する認識結果を外部に出力するステップS8とをコンピュータに実現させる。
【解決手段】受精卵観察の画像処理プログラムGPは、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得するステップS3と、観察画像に写し込まれた複数の物体を抽出するステップS4と、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップS5と、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップS6,S7と、物体に対する認識結果を外部に出力するステップS8とをコンピュータに実現させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、受精卵観察において取得された観察画像から受精卵と異物とを自動判別する画像処理手段、及びこれを利用した受精卵の製造方法に関する。
【背景技術】
【0002】
近年、生殖補助医療技術(ART)の発展に伴い、体外受精による受精卵を培養しながらその生育状態を観察することが行われている。受精卵などの培養物の状況を観察する装置の例として、培養顕微鏡が挙げられる(例えば、特許文献1を参照)。培養顕微鏡は、受精卵の培養に好適な環境を形成する培養装置(インベキュータ)と、培養装置に収容された培養容器内の受精卵の状態を顕微観察する顕微観察系とを備え、予め設定された一定時間ごとに受精卵の観察画像を取得し、ユーザが受精卵を目視により認識した上で、受精卵の生育状態の観察、記録、管理等を自動で行うことができるように構成される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−229619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような装置において、培養容器中の受精卵の生育状態を顕微観察する場合、培地の中から観察対象である受精卵を検出しなければならないが、培地には受精卵の他にもゴミやオイル粒等の異物が混入しているため、受精卵とそれ以外の異物とを判別して受精卵を認識するには、できる限り高倍率での顕微観察が必要になる。しかしながら、高倍観察になるほど解像度の高い画像を取得することができるものの、高倍観察になるにつれて観察視野(観察範囲)が狭くなり視野内に受精卵の像が写し込まれる確率が低くなるため、受精卵を検出するのに広視野領域において多数の高倍画像の撮影が必要になるとともに、その多数の画像の中から受精卵を識別する複雑な処理が必要となり、受精卵の検出に長時間を要するという問題があった。そのため、できる限り広視野を確保した低解像度の画像であっても受精卵を正確に認識することが可能な手段が求められている。
【0005】
本発明は、上記のような課題に鑑みてなされたものであり、低倍観察において受精卵を高速且つ頑健に認識する手段を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明を例示する第1の態様に従えば、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得し、観察画像に写し込まれた複数の物体を抽出し、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理方法が提供される。
【0007】
本発明を例示する第2の態様に従えば、コンピュータにより読み取り可能であり、撮像装置により撮影されて画像を取得して画像処理する画像処理装置としてコンピュータを機能させるための画像処理プログラムであって、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得するステップと、観察画像に写し込まれた複数の物体を抽出するステップと、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップと、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップと、物体に対する認識結果を外部に出力するステップとを、コンピュータに実現させることを特徴とする受精卵観察の画像処理プログラムが提供される。
【0008】
本発明を例示する第3の態様に従えば、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら複数の物体を撮影する撮像装置と、光学的距離を変化させて撮像装置により撮影された複数の観察画像の各々から複数の物体を抽出し、複数の物体の中から受精卵を認識する画像解析部と、画像解析部により判断された認識結果を外部に出力する出力部とを備え、画像解析部が、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理装置が提供される。
【0009】
本発明を例示する第4の態様に従えば、所定の環境条件で受精卵を培養し、受精卵が存在する培養容器中から、上記構成の画像処理装置を用いて受精卵を識別することを特徴とする受精卵の製造方法が提供される。
【0010】
本発明を例示する第5の態様に従えば、所定の環境条件で受精卵を培養し、受精卵が存在する培養容器中において、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得し、観察画像に写し込まれた複数の物体を抽出し、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵の製造方法が提供される。
【発明の効果】
【0011】
このような受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法によれば、観察対象の受精卵を高速且つ頑健に認識することが可能になる。
【図面の簡単な説明】
【0012】
【図1】画像処理プログラムの概要を示すフローチャートである。
【図2】本発明の適用例として示す培養観察システムの概要構成図である。
【図3】上記培養観察システムのブロック図である。
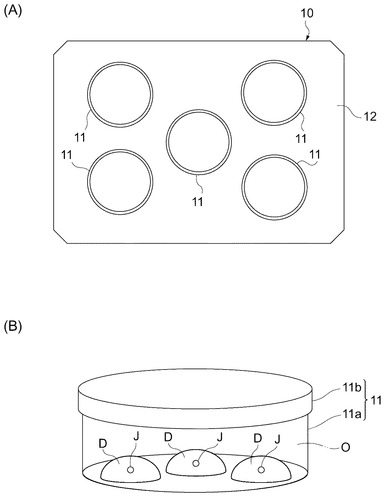
【図4】(A)は培養容器を示す平面図であり、(B)はディッシュを示す斜視図である。
【図5】位相差顕微鏡の概要構成図である。
【図6】受精卵とそれ以外の異物との特徴を説明するための図である。
【図7】フォーカス面を順次変更して受精卵を撮影した複数の観察画像を示す模式図である。
【図8】受精卵の輪郭部での回折現象を説明するための模式図である。
【図9】画像の特徴量算出の対象となる領域を説明するための模式図である。
【図10】フォーカス面座標を変化させたときの面積S及び輝度総和Vの変化を表すグラフである。
【図11】画像処理装置の概要構成を示すブロック図である。
【図12】受精卵の製造方法の概要を示すフローチャートである。
【発明を実施するための形態】
【0013】
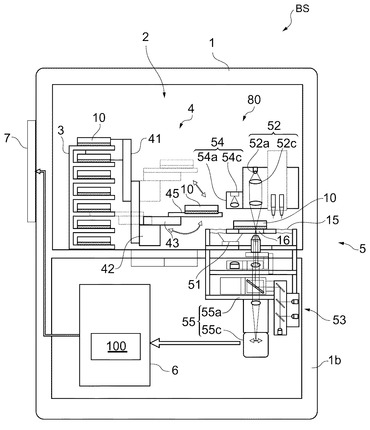
以下、本発明を実施するための形態について、図面を参照しながら説明する。本実施形態に係る画像処理装置を適用したシステムの一例として、培養観察システムの概要構成図及びブロック図を、それぞれ図2及び図3に示す。
【0014】
培養観察システムBSは、大別的には、筐体1の上部に設けられた培養室2と、複数の培養容器10を収容保持する棚状のストッカー3と、培養容器10内の試料を観察する観察ユニット5と、培養容器10をストッカー3と観察ユニット5との間で搬送する搬送ユニット4と、システムの作動を統括的に制御する制御ユニット6と、画像表示装置を備えた操作盤7などから構成される。
【0015】
培養室2は、培養環境を形成する部屋であり、環境変化やコンタミネーションを防止するためサンプル投入後は密閉状態に保持される。培養室2に付随して、培養室2内の温度を昇温・降温させる温度調整装置21、湿度を調整する加湿器22、CO2ガスやN2ガス等のガスを供給するガス供給装置23、培養室2全体の環境を均一化させるための循環ファン24、培養室2の温度や湿度、二酸化炭素濃度等を検出する環境センサ25などが設けられている。各機器の作動は制御ユニット6により制御され、培養室2の温度や湿度、二酸化炭素濃度等により規定される培養環境が、操作盤7において設定された培養条件に合致した状態に維持される。
【0016】
ストッカー3は、図2における紙面直行の前後方向、及び上下方向にそれぞれ複数に仕切られた棚状に形成されている。各棚にはそれぞれ固有の番地が設定されており、例えば前後方向をA〜C列、上下方向を1〜7段とした場合に、A列5段の棚がA−5のように設定される。
【0017】
培養容器10は、培養物の種類や目的等に応じてフラスコやディッシュ、ウェルプレートなど適宜なものが選択され、本実施形態では、図4(A)に示すように、透光性の材質で形成された直径約35mmの5つのディッシュ11(容器11a及び蓋11bからなる)と、ディッシュ11を保持するホルダ12とを備えた構成を例示しており、図4(B)に示すように、培養物たる受精卵Jは、pHに応じて変色するフェノールレッドなどのpH指示薬が入った培地ドロップAとともに各ディッシュ11に注入される。ディッシュ11の底面には、ピペット等により滴下された20[μl]程度の培地ドロップDが1〜複数個形成されており(図4(B)では3個を図示)、培地ドロップDはディッシュ11内において無色透明のミネラルオイルOによって浸された状態となっている。それぞれの培地ドロップD内には、例えば対外受精のために同一母体から同時期に採卵された受精卵Jが1個(または複数個)ずつ挿入されている。また、培養容器10にはコード番号が付与され、ストッカー3の指定番地に対応づけて収容される。
【0018】
搬送ユニット4は、培養室2の内部に設けられて上下移動可能なZステージ41、前後移動可能なYステージ42、左右移動可能なXステージ43などからなり、Xステージ43の先端側に培養容器10を持ち上げ支持する支持アーム45が設けられている。搬送ユニット4、支持アーム45がストッカー3の全棚と観察ユニット5との間を移動可能な移動範囲を有して構成される。
【0019】
観察ユニット5は、試料台15の下側から試料を照明する第1照明部51、顕微観察系の光軸に沿って試料台15の上方から試料を照明する第2照明部52、下方から試料を照明する第3照明部53、試料のマクロ観察を行うマクロ観察系54、試料のミクロ観察を行う顕微観察系55、及び画像処理装置100(図11を参照)などから構成される。試料台15は、透光性を有する材質で構成されるとともに観察領域に透明な窓部16が設けられている。また、試料台15は、制御ユニット6からの作動制御によりXY方向(水平面内方向)およびZ方向(上下方向)に移動可能な微細駆動ステージからなり、その上面部に載置された培養容器10をXY方向に移動させることにより、培養容器10をマクロ観察系54の光軸上へ挿入したり、顕微観察系55の光軸上へ挿入したりすることが可能になっている。
【0020】
第1照明部51は、下部フレーム1b側に設けられた面発光の光源からなり、試料台15の下側から培養容器10全体をバックライト照明する。第2照明部52は、LED等の光源52aと、位相リングやコンデンサレンズ等からなる照明光学系52cとを有して培養室2に設けられており、試料台15の上方から顕微観察系55の光軸に沿って培養容器10中の試料を照明する。第3照明部53は、それぞれ落射照明観察や蛍光観察に好適な波長の光を射出する複数のLEDや水銀等の光源と、各光源から射出された光を顕微観察系55の光軸に重畳させるビームスプリッタや蛍光フィルタ等からなる照明光学系とを有して、培養室2の下側に位置する下部フレーム1b内に配設されており、試料台15の下方から顕微観察系55の光軸に沿って培養容器10中の試料を照明する。
【0021】
マクロ観察系54は、観察光学系54aと、この観察光学系54aにより結像された試料の像を撮影するCCDカメラ等の撮像装置54cとを有し、第1照明部51の上方に位置して培養室2内に設けられている。マクロ観察系54は、第1照明部51によりバックライト照明された培養容器10の上方からの全体観察画像(マクロ画像)を撮影する。
【0022】
顕微観察系55は、対物レンズ84や位相リング82等(図5を参照)からなる観察光学系55aと、観察光学系55aにより結像された試料の像を撮影する冷却CCD等の撮像装置55cとを有し、下部フレーム1bの内部に配設されている。上記の第2照明部52と顕微観察系55とにより位相差観察用の顕微鏡80が構成される。対物レンズ84はレンズ駆動機構87(図5を参照)により光軸に沿う方向(Z方向)に往復移動可能に構成されており、対物レンズ84(観察光学系55a)と試料面との光軸方向の相対位置(光学的距離)を変化させることが可能になっている。レンズ駆動機構87としては、例えばステッピングモータや、ピエゾアクチュエータ(ピエゾ素子)等が利用される。なお、本実施形態では、対物レンズ84を光軸方向に移動させることにより試料面との相対位置を変化させているが、試料台15を光軸方向に移動させたり、対物レンズ84と試料台15との両方を光軸方向に移動させてもよい。
【0023】
また、対物レンズ84は複数設けられるとともに、詳細図示を省略するレボルバやスライダなどの変位機構を用いて複数倍率に設定可能に構成されており、初期選択のレンズ設定に応じて、本実施形態では少なくとも低倍観察用(例えば2倍観察用)と高倍観察用(例えば10倍観察用)との2種類の倍率の間で変倍可能なように切り換えられる。顕微観察系55は、第2照明部52により照明された試料の透過光による位相差画像や、第3照明部53により照明されて試料が発する蛍光による蛍光画像など、培養容器10内の試料を顕微鏡観察した顕微観察画像(ミクロ画像)を撮影する。なお、詳細は後述するが、本実施形態では受精卵の検出効率を向上させるために、低倍観察用の対物レンズを用いて観察することを特徴としている。
【0024】
画像処理装置100は、マクロ観察系54の撮像装置54c及び顕微観察系55の撮像装置55cから入力された信号をA/D変換するとともに、各種の画像処理を施して全体観察画像または顕微観察画像の画像データを生成する。また、画像処理装置100は、これらの観察画像(全体観察画像及び顕微観察画像)の画像データに対して画像解析を施し、画像中に存在するオブジェクトの抽出や、オブジェクトの画像特徴量の算出、受精卵の識別等の画像処理を行う。画像処理装置100は、具体的には、次述する制御ユニット6のROMに記憶された画像処理プログラムが実行されることにより構築される。なお、この画像処理装置100については、後に詳述する。
【0025】
制御ユニット6は、処理を実行するCPU61、培養観察システムBSの制御プログラムや制御データ等が設定記憶されたROM62、観察条件や画像データ等を一時記憶するRAM63などを有し、培養観察システムBSの作動を制御する。そのため、図3に示すように、培養室2、搬送装置4、観察ユニット5、操作盤7の各構成機器が制御ユニット6に接続されている。RAM63には、観察プログラムに応じた培養室2の環境条件や、観察スケジュール、観察ユニット5における観察種別や観察位置、観察倍率等が設定され記憶される。また、RAM63には、観察ユニット5により撮影された画像データを記録する画像データ記憶領域が設けられ、培養容器10のコード番号や撮影日時等を含むインデックス・データと画像データとが対応付けて記録される。
【0026】
操作盤7には、キーボードやスイッチ等の入出力機器が設けられた操作パネル71、操作画面や画像データ等を表示する表示パネル72が設けられ、操作パネル71において観察プログラムの設定や条件選択、動作指令等の入力が行われる。通信部65は有線または無線の通信規格に準拠して構成されており、この通信部65に外部接続されるコンピュータ等との間でデータの送受信が可能になっている。
【0027】
このように概要構成される培養観察システムBSでは、操作盤7において設定された観察プログラムの設定条件に従い、CPU61がROM62に記憶された制御プログラムに基づいて各部の作動を制御するとともに、培養容器10内の試料の撮影を自動的に実行する。すなわち、操作パネル71に対するパネル操作(または通信部65を介したリモート操作)によって観察プログラムがスタートされると、CPU61が、RAM63に記憶された環境条件の各条件値を読み込むとともに、環境センサ25から入力される培養室2の環境状態を検出し、条件値と実測値との差異に応じて温度調整装置21、加湿器22、ガス供給装置23、循環ファン24等を作動させて、培養室2の温度や湿度、二酸化炭素濃度などの培養環境についてフィードバック制御が行われる。
【0028】
また、CPU61は、RAM63に記憶された観察条件を読み込む、観察スケジュールに基づいて搬送ユニット4のX,Y,Zステージ41,42,43を作動させてストッカー3から観察対象の培養容器10を観察ユニット5の試料台15に搬送して、観察ユニット5による観察を開始させる。例えば、観察プログラムにおいて設定された観察がマクロ観察である場合には、搬送ユニット4によりストッカー3から搬送してきた培養容器10をマクロ観察系54の光軸上に位置決めして試料台15に載置し、第1照明部51の光源を点灯させて、バックライト照明された培養容器10の上方から撮像装置54cにより全体観察像を撮影する。撮像装置54cから制御ユニット6に入力された信号は、画像処理装置100により処理されて全体観察画像が生成され、その画像データが撮影日時等のインデックス・データなどとともにRAM63の画像データ記憶領域に記憶される。
【0029】
また、観察プログラムにおいて設定された観察が、培養容器10内の特定位置の試料のミクロ観察である場合には、搬送ユニット4により搬送してきた培養容器10内の特定位置を顕微観察系55の光軸上に位置決めして試料台15に載置し、第2照明部52または第3照明部53の光源を点灯させて、透過照明、落射照明、蛍光による顕微観察像を撮像装置55cに撮影させる。撮像装置55cにより撮影されて制御ユニット6に入力された信号は、画像処理装置100により処理されて顕微観察画像(位相差画像、蛍光画像等)が生成され、その画像データが撮影日時等のインデックス・データなどとともにRAM63の画像データ記憶領域に記憶される。
【0030】
CPU61は、上記のような全体観察像の撮影や顕微観察像の撮影を、観察プログラムに設定された観察スケジュールに基づいて順次実行する。RAM63に記憶された画像データは、操作パネル71から入力される画像表示指令に応じてRAM63から読み出され、例えば指定時刻の全体観察画像や顕微観察画像、画像解析の解析結果などが表示パネル72に表示される。
【0031】
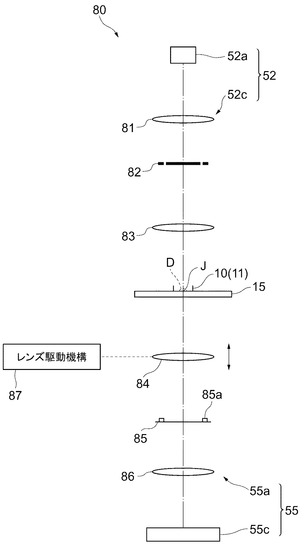
続いて、このように構成される培養観察システムBSにおいて、第2照明部52と顕微観察系55とにより構成される位相差顕微鏡80について概要説明する。ここで、図5は位相差顕微鏡80の構成を示す模式図である。位相差顕微鏡80は、第2照明部52において培養室2内に設けられた光源52a及び照明光学系52cと、顕微観察系55において下部フレーム1b内に設けられた観察光学系55a及び撮像装置55cとを有して構成される。
【0032】
照明光学系52cは、光源側から順に、コレクタレンズ81、輪帯絞り82及びコンデンサレンズ83を備えている。観察光学系55aは、光源側から順に、対物レンズ84、位相リング85及び結像レンズ86を備えている。
【0033】
位相差顕微鏡80において、光源52aから射出された照明光は、コレクタレンズ81により略平行光束に変換され、輪帯形状(リング形状)のスリットが設けられた輪帯絞り82に入射する。輪帯絞り82のスリットを通過した光は、コンデンサレンズ83によって集光され、試料台15に載置された培養容器10(ディッシュ11)内の試料に照射される。
【0034】
試料に照射された照明光は、試料を通過する直接光と、位相物体である試料により回折される回折光とに分かれる。この回折現象は屈折率に変化のある部位で発生するため、当該回折光は、受精卵Jと培地ドロップDとの境界部分、受精卵Jの内部構造等、の位相物体(受精卵J)の形状情報を含んでおり、この回折により照明光に対して位相が1/4波長だけ遅れることになる。これら直接光及び回折光は対物レンズ84により集光されて、輪帯絞り82と光学的に共役な位置に配置された位相リング85に入射する。
【0035】
位相リング85に入射する光のうち直接光は、輪帯絞り82のスリットとほぼ同じ形状(リング状)に形成された位相板85aに入射して、位相板85aによって光の一部が吸収されて光量が弱められるとともに、位相が照明光の1/4波長だけずらされる。一方、位相リング85に入射する光のうち回折光は、位相板85a以外の部分をそのまま透過する。位相リング85を通過した直接光及び回折光は結像レンズ86により結像されて、撮像装置55cの撮像面上で干渉する。このとき、直接光の位相は位相板85aによって1/4波長だけずれているため、直接光と回折光との位相差は1/2波長もしくは0になっており、その干渉によって位相の変化を光の明暗として可視化される。これにより、撮像装置55cの撮像面上には明暗のコントラストがついた試料(受精卵J)の拡大像が形成され、撮像装置55cにより撮影されることになる。
【0036】
このとき、上述したように、対物レンズ84はレンズ駆動機構87によって光軸に沿った方向(Z方向)に往復移動可能であり、試料と対物レンズ84(観察光学系55a)との相対位置(光学的距離)が変化するようになっている。これに対し、撮像装置55cは試料の撮影を連続的に行うため、対物レンズ84の移動に応じてコントラストが変化する複数の画像を所定の撮像ピッチで撮影することができる。これにより、1つの試料に対して異なるフォーカス面から取得された複数の観察画像を得ることができる。
【0037】
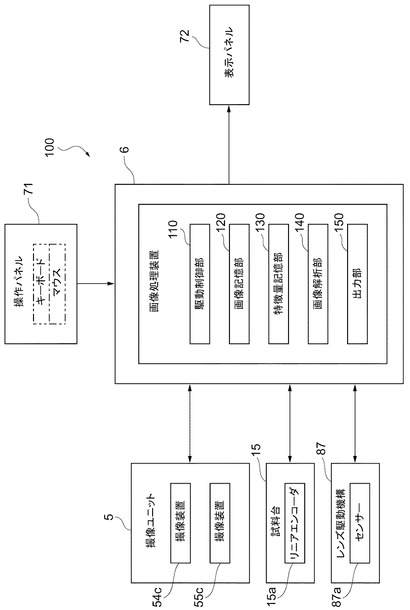
ここで、撮像装置55cはCCDやCMOS等の撮像素子を搭載しており、撮像素子の撮像面上に形成された試料の拡大像を撮像して得られた画像信号を画像処理装置100へ出力する。また、画像処理装置100には、撮像装置55cからの画像信号の他に、試料台(微細駆動ステージ)15に内蔵されたエンコーダ15a(図10を参照)及びレンズ駆動機構87のコントローラに内蔵されたセンサー87a(図10を参照)からの位置検出信号が入力される。そのため、試料を撮像したときの試料台15の位置(X,Y方向位置)と対物レンズ84の位置(Z方向位置)とを知ることができる。
【0038】
以上のように構成される培養観察システムBSにおいて、画像処理装置100は、培養容器10内における受精卵の生育状態等の観察を実行するため、観察画像から観察対象となる受精卵とそれ以外のゴミや気泡等の異物(非対象物)とを判別して、受精卵を認識する機能を備えている。
【0039】
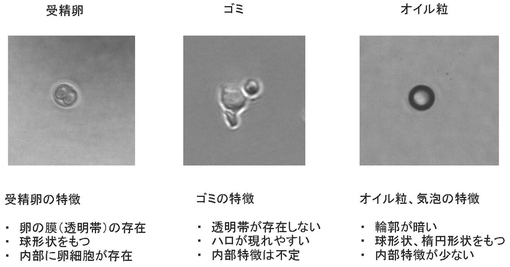
ここで、培地ドロップD内の混入物は、ゴミ(培地の残りかす)、オイル粒(ディッシュ11内に充填されるミネラルオイルOが培地に入り込んだもの)、及び気泡に大別される。ここで、図6にも示すように、受精卵、ゴミ、オイル粒、及び気泡の各々は次のような特徴を持っている。
【0040】
(受精卵の特徴)
受精卵は、その輪郭部に膜(「透明帯」と称する)が存在する、外形が球形状を有している、輪郭内部に内部構造(卵細胞)が存在している、という特徴を持つ。
【0041】
(ゴミの特徴)
ゴミは、その輪郭部に透明帯が存在しない、位相差画像では輪郭部にハロが現れる、輪郭内部の構造は不定である、という特徴を持つ。
【0042】
(オイル粒、気泡の特徴)
オイル粒及び気泡は、その輪郭部に透明帯が存在しない、位相差画像では濃淡が強めにでる、外形が球形状や楕円形状である、輪郭内部の構造が少ない、という特徴を持つ。
【0043】
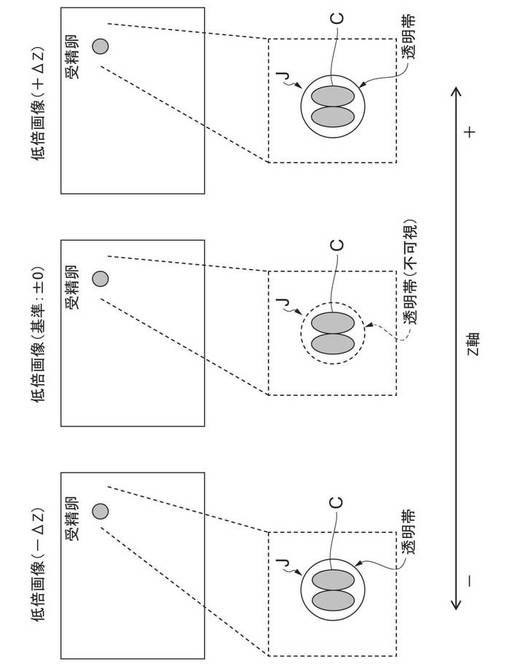
このように受精卵は最外輪郭を形成する透明帯を持つという属性を有しており、対物レンズ84を光軸方向に駆動させて、顕微観察(位相差観察)によって異なるフォーカス面の観察画像を撮影したとき、そのフォーカス面のZ位置によっては受精卵の輪郭部で屈折率の変化がほとんど生じずに明暗のコントラストとして現れない画像、すなわち透明体(及びその輪郭部)が視認できない画像が得られる。
【0044】
これについて、図7及び図8を追加参照して簡単に説明する。なお、図7はフォーカス面を順次変更して撮影した複数の観察画像を示す模式図であり、図8は受精卵の輪郭部での回折現象を説明するための模式図である。なお、これらの図においてはZ軸がフォーカス面座標と一致する。位相差観察における回折現象は、前述したように屈折率変化のある部位、例えば、受精卵(位相物体)と培地ドロップDとの境界部分や、受精卵の内部構造の部分で発生する。ここで図8に示すように、受精卵Jをほぼ球形として考えた場合、受精卵Jの輪郭部(透明帯の膜部分)において、球の中心Xを通る基準のフォーカス面(例えばZ=0)では、輪郭部が垂直方向成分となるため、屈折率変化(回折現象)がほとんどなく、明暗のコントラストが生じない。その結果、図7に示すように、透明帯(及びその輪郭部)の像が見かけ上消失することになる。一方、フォーカス面を上下(例えばZ=±ΔZ)に振ると、輪郭部での屈折率変化によって回折光を生じ、透明帯(及びその輪郭部)が明暗のコントラストが付いた像として見えることになる。これに対して、ゴミやオイル粒等の異物では透明帯を持たず、輪郭部での屈折率も一様に高く安定しているため、フォーカス面のZ位置によらず常に輪郭部が写し込まれることになる。
【0045】
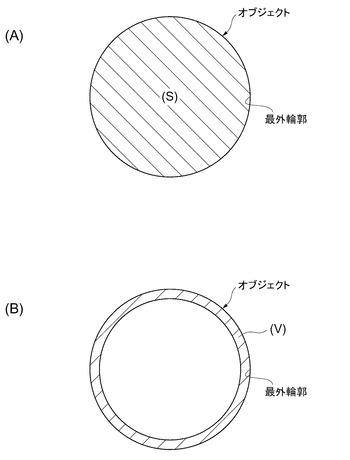
そのため、異なるフォーカス面から取得された複数の観察画像間において透明帯の像の出没を検出することで受精卵を認識することとする。ここで、観察画像において受精卵の透明帯が出現するときは、当然ながら透明帯の外側の輪郭が最外輪郭となって面積が相対的に大きくなるとともに、その最外輪郭の内側(すなわち、透明帯)の輝度が相対的に高くなる。一方、透明帯が画像から消失するときには、内部構造(図8においては卵細胞C)の輪郭が最外輪郭となって面積が相対的に小さくなるとともに、その最外輪郭の内側(卵細胞)の輝度が相対的に低くなる。そこで、最外輪郭の大きさ及びその内側の輝度を受精卵固有の特徴量として設定し、フォーカス面を振ったときの特徴量の変化に基づいて受精卵を識別する。
【0046】
本実施形態において、画像処理装置100による受精卵観察の画像処理方法は、異なるフォーカス面の複数の観察画像を取得し、各観察画像に写し込まれる物体(オブジェクト)に対して受精卵固有の属性に基づく画像特徴量(以下に詳述する、I.最外輪郭の大きさ、II.内輪帯の輝度総和)を算出し、観察画像に応じて画像特徴量が変化(すなわち透明帯の像が出没)する物体を受精卵であると認識するように構成される。それでは、以下にこの画像処理方法について基本的な概念から説明する、なお、以降の説明では、第2照明部52及び顕微観察系55等によって構成される位相差顕微鏡80によって撮影される位相差画像(顕微観察画像)に基づいて受精卵の観察を行う場合を例示する。
【0047】
(オブジェクトの抽出)
まず、撮像装置55cにより撮影された異なるフォーカス面となる複数の観察画像(位相差画像)に対して、例えば分散フィルタまたはSnakesやLevel Set法などといった動的輪郭抽出手法を適用して、観察画像内に含まれる物体(受精卵及び異物の領域)の最外輪郭を抽出し、その輪郭に囲まれた閉じた領域をオブジェクトとして抽出してセグメンテーションを行う。こうしてセグメント化された各オブジェクトに対して、個々のオブジェクトを区別可能なように固有の標識としてラベルを割り当てる。なお、フォーカス面を振った複数の観察画像においては、同一のオブジェクトが相互に写し込まれているため、観察画像間で同一性のあるオブジェクトについては同一のラベルを付与する対応付けがなされる。
【0048】
(特徴量算出)
ラベリング処理を施した各オブジェクトに対し、受精卵の属性に基づく画像の特徴量として、I.最外輪郭の大きさ、II.内輪帯部分の輝度総和、を計算する。なお、各オブジェクトの特徴量は観察画像単位で計算され、同一のオブジェクトであっても1つの観察画像に対して各特徴量が1つずつ計算される。なお、図9に上記の特徴量算出の対象となる部分を説明するための模式図を示す。
【0049】
I.最外輪郭の大きさ
オブジェクトの最外輪郭の大きさとして、オブジェクト領域の面積、すなわち最外輪郭内部の面積Sを算出する(図9(A)に斜線で示す部分の面積)。
【0050】
II.内輪帯の輝度総和
観察画像(元画像)において、オブジェクトの最外輪郭内側に輪帯部分(「内輪帯」と称する)の領域(図9(B)に斜線で示す領域)を設定し、この内輪帯の輝度値(例えば、8ビット階調の場合に0〜255)の総和である輝度総和Vを算出する。例えば、オブジェクトが受精卵である場合には、内輪帯の部分が透明帯にほぼ一致し、透明帯の輝度値の総和を算出することになる。内輪帯の幅としては、過去のサンプリングデータ等から既知である受精卵の透明帯の幅に相当する大きさを、観察倍率等の画像取得条件に応じて設定する(例えば、数ピクセル分の幅)。なお、各オブジェクトの画像に対して収縮処理を施したマスク画像を生成し、原画像とマスク画像との差分画像の部分を内輪帯部分として特定してもよい。
【0051】
以上の2つの特徴量は、ラベリングされたオブジェクトごとに求められ、これを基に複数のオブジェクトの中から受精卵を決定する。
【0052】
(受精卵の識別)
受精卵候補となる各オブジェクトについて、複数の観察画像に対する特徴量の変化を計算する。各オブジェクトはフォーカス位置の異なる複数の観察画像の各々に写り込んでいるため、各オブジェクトに対して画像の特徴量となる面積S及び輝度総和Vは観察画像の枚数に対応する個数だけ取得されており、これに基づいて複数の観察画像間の同一オブジェクトについての特徴量変化を計算する。
【0053】
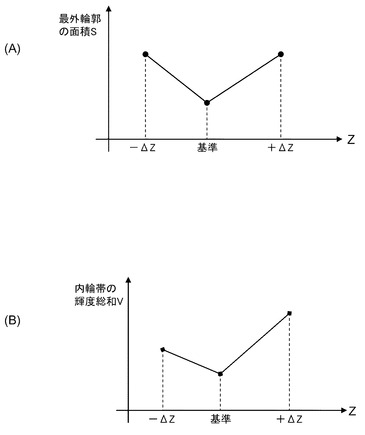
ここで、受精卵の画像の特徴量変化の一例として、前述の図7の状態においてフォーカス面のZ位置を変化させたときの面積S及び輝度総和Vの変化を表すグラフを図10に示している。前述したように、フォーカス面のZ位置を変化させて受精卵の観察画像を複数取得した場合、受精卵の持つ透明帯の像が(見た目上)一時的に消失する画像が得られることを考えると、透明帯が写し込まれていない画像に基づいて受精卵の画像の特徴量を算出すると、この特徴量である面積S及び輝度総和Vの値は相対的に小さな値となる。つまり、透明帯(及びその輪郭)が消失することで、画像に写る最外輪郭が内部構造(卵細胞C)の輪郭になるため、面積Sが減少するとともに、卵細胞Cが持つ構造により輝度総和Vも低下することになる。一方、ゴミ、オイル粒、気泡などの異物については透明帯を持たず、輪郭部での屈折率も一様に高く安定しているため、フォーカス面のZ位置によらず常に一定の最外輪郭を写し込めるため、画像の特徴量はほとんど変化することがない。そのため、図10(A),(B)に示すように、複数の観察画像間において面積S及び輝度総和Sが変化するオブジェクト、より詳細には、面積S及び輝度総和Vが一度小さくなってから再び大きくなるように(極小点を持つように)変化するオブジェクトを受精卵であると認識する。
【0054】
このような受精卵の判別手法(画像処理方法)では、解像度の高い高倍画像から画像特徴量を細かく数値化してこの特徴量そのものを比較するのではなく、異なるフォーカス面から取得した複数の観察画像間における画像特徴量の変化に基づいて受精卵を判別する構成であり、解像度の低い低倍画像からでも画像特徴量の顕著な変化は捉えることが可能であるため、受精卵の検出を広範囲な観察視野において高速に行うことができる。
【0055】
なお、ゴミ等の異物の像であってもフォーカス面によっては画像の特徴量が多少変化する場合(例えば、異物が楕円球状の外形を持つ場合の面積S)も考えられるため、特徴量の変化量に対して予め所定の閾値を設定しておき、この閾値未満のオブジェクトをリジェクトするようにしてもよい。また、図7等では、基準フォーカス面(Z=0)に対して撮像ピッチ(サンプリング間隔)としてフォーカス方向にΔZだけ上下に振って観察画像を取得した場合を例示しているが、更に複数の観察画像を連続的に取得するものであってもよい。
【0056】
さらに、ここで用いられる対物レンズ84の条件としては、一般的な動物由来の受精卵の大きさ(例えば、人間の受精卵の場合には直径で約100[μm]程度)を考慮すると、焦点深度の浅い(NA=0.2以上)光学レンズを適用させて、受精卵の透明帯を見た目上消失させる現象を起きやすくさせることが好ましい。
【0057】
次に、培養観察システムBSの画像処理装置100において実行される画像解析の具体的なアプリケーションについて図1及び図11を併せて参照しながら説明する。ここで、図1は受精卵観察の画像処理プログラムGPにおける処理の概要を示すフローチャート、図11は受精卵観察の画像処理を実行する画像処理装置100の概要構成を示すブロック図である。
【0058】
画像処理装置100は、試料台15及びレンズ駆動機構87等の作動を制御する駆動制御部110と、撮像装置55cにより撮影された観察画像を取得して記憶する画像記憶部120と、観察画像に写し込まれたオブジェクトごとに算出される画像の特徴量を記憶する特徴量記憶部130と、観察画像を解析して観察画像に写し込まれた複数のオブジェクトの中から受精卵を認識する画像解析部140と、画像解析部140により解析された判断結果を外部に出力する出力部150とを備え、画像解析部140により判断された受精卵であるか否かの判断結果を、例えば表示パネル72に出力して表示させるように構成される。画像処理装置100は、ROM62に予め設定記憶された画像処理プログラムGPがCPU61に読み込まれ、CPU61によって画像処理プログラムGPに基づく処理が順次実行されるように構成される。
【0059】
記述したように、培養観察システムBSでは、観察プログラムにおいて設定された観察条件に従って、所定時間ごとに指定された培養容器10内の受精卵観察が行われる。具体的に、CPU61は、搬送ユニット4の各ステージ41,42,43を作動させてストッカー3から観察対象の培養容器10を観察ユニット5に搬送(本実施形態では、顕微観察系55の光軸上に配置)する。
【0060】
画像処理装置100は、先ず始めにステップS1として、顕微観察系55の撮像装置55cによりディッシュ11内の所望の培地ドロップDの観察領域を撮像するために、駆動制御部110によって、試料台15を面内方向(X,Y方向)に駆動させる。ここで、低倍観察用(2倍観察用)の対物レンズによる視野サイズは培地ドロップ1個分のサイズよりも小さく、培地ドロップD1個分の視野をカバーするための必要な撮像枚数としては、例えば2×2〜3×3程度であるため、試料台15をX,Y方向に所定の移動ピッチでステップ状に駆動させて、試料(培地ドロップD)と対物レンズ84との位置決めを行う。
【0061】
ステップS2では、駆動制御部110によって、レンズ駆動機構87を駆動させて対物レンズ84を光軸方向に沿って移動させながら、撮像装置55cに所定の撮像ピッチで位相差画像(観察画像)を撮影させる。なお、対物レンズ84を往復移動させて撮像装置55cにより多数の観察画像を取得したり、連続的に撮影して動画として取得するものでもよいが、一般的な受精卵の大きさから撮像位置を予め設定しておき、受精卵を識別するために必要な枚数(本実施形態では3枚)だけを取得するものでもよい。例えば、受精卵が自重でディッシュ11の底面まで沈んでいるときには、ディッシュ11の底面から既知の受精卵の大きさの半分(受精卵を球と仮定したときの半径値に相当する)だけ上方の位置に基準フォーカス面(Z=0)を設定し、この基準フォーカス面と、そこから撮像ピッチとして受精卵の大きさの1/4(受精卵の大きさ等によって任意に設定可)だけ上下に振った位置(すなわち、Z=±ΔZの位置)との3か所でのみ撮影を行うものでもよい。
【0062】
ステップS3では、撮像装置55cから取得した複数の観察画像が、試料台15のリニアエンコーダ15aやレンズ駆動機構87のセンサー87aから出力される当該撮像が行われたときの位置情報とともに、培養容器10のコード番号や観察位置、観察時刻などのインデックス・データと対応付けられて画像記憶部120に保存される。
【0063】
ステップS4では、画像解析部140によって、画像記憶部120に記憶された各観察画像に対し、例えば、分散フィルタを施したのち二値化する手法や、動的輪郭抽出手法(SnakesやLevel Set法)などの最外輪郭抽出処理が実行され、各観察画像内に含まれるオブジェクトの最も外側の輪郭が抽出される。また、このように最外輪郭が抽出された各オブジェクトに対してラベリングが施され、複数の観察画像間で同一性があると判断されたオブジェクトに対しては同一のラベルを付与することによって対応付けがなされる。
【0064】
ステップS5では、画像解析部140によって、各オブジェクトに対して観察画像ごとに、最外輪郭の大きさ(面積S)、及び内輪帯の輝度総和Vがそれぞれ算出される。特徴量記憶部120には、オブジェクトごとに割り当てたラベルと、画像解析部140により算出された画像の特徴量(面積S及び輝度総和V)とが対応付けられた状態で記憶される。
【0065】
ステップS6では、画像解析部140によって、各オブジェクトに対して複数の観察画像間における最外輪郭の大きさS及び内輪帯部分の輝度総和Vの変化量が計算される。
【0066】
ステップS7では、画像解析部140によって、各オブジェクトの特徴量の変化量に基づいて受精卵であるか否かが判定され、特徴量に顕著な変化があったラベルのオブジェクトが受精卵であると認識される。例えば、フォーカス面座標(Z)に対する面積S及び輝度総和Vの変化に極小点が存在する場合、変化量が所定の閾値を超えた場合などに、その特徴量を持つオブジェクトを受精卵であると認識する。
【0067】
ステップS8では、出力部150によって、画像解析部140において判断された受精卵の識別結果が出力される。出力部150から出力された判断結果は、操作盤7の表示パネル72に表示され、画像解析部140によって受精卵であると判断されたオブジェクトに受精卵を示す識別表示がされる。
【0068】
具体的な表示方法として、例えば、受精卵であることを示す記号を付加して表示したり、受精卵とそれ以外の異物とを異なる色相や輝度で表示したり、異物のみを塗りつぶして表示したり、異物の写り込みを除去した画像を表示する等により、受精卵とそれ以外の異物とを明瞭に判別して表示する、などのインターフェースが例示される。なお、出力部150から出力される上記のような判別データを、通信部65を介して外部接続されるコンピュータ等に送信して、同様の画像を表示させたり、受精卵の生育状態を観察するための基礎データとして用いたりするように構成することができる。
【0069】
これにより、観察者は、表示パネル72に表示された画像や外部接続されたコンピュータ等のモニタに表示された画像を参照することにより、観察中の(または既に観察画像の取得を終了した)各画像に含まれるオブジェクトが受精卵であるか否かを直ちに判断することができる。また、このようにして受精卵とそれ以外の異物とが判別されたデータを用いることにより、受精卵の生育状態を効率的に観察することが可能になる。
【0070】
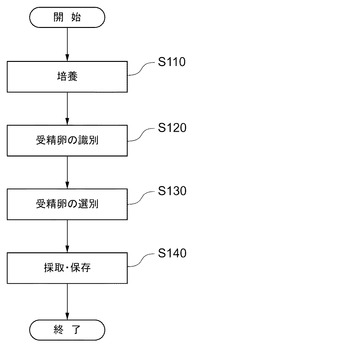
次に、受精卵の製造方法について図12を追加参照して概要説明する。まず、ステップS110において、受精卵を培地ドロップDと共に培養容器10(ディッシュ11)内に注入し、この培養容器10を受精卵の培養に適した環境条件に維持された培養室2内に収納して、当該環境条件の下で受精卵を培養する。なお、この環境条件は、制御ユニット6において培養室2内の温度や湿度、二酸化炭素濃度等が受精卵の培養環境に合わせて調節される。
【0071】
ステップS120では、培養容器10内の受精卵の観察として、前述した画像処理のステップS1〜S8(図1を参照)を実行して、培地ドロップDごとに観察画像に写し込まれる複数のオブジェクトの中から受精卵を識別する。このとき培養容器10(ディッシュ11)内において、1個の培地ドロップDに対して受精卵が各1個(又は複数個)ずつ識別される。
【0072】
続いて、ステップS130では、培地ドロップDごとに識別された複数の受精卵を所定の選別基準に基づいて選別する。受精卵の選別基準としては、卵割のタイミングや卵割球の形態等に基づいて受精卵のグレードが判定されて、この選別基準を満足する良好なものが選別される。例えば、良好な生育状態を経たものとして、卵内全ての卵細胞において卵割の起きたタイミングが同時期であるか否かに基づいて行われる。すなわち、正常な受精卵の卵割については、同じ世代の各細胞はほぼ同時期のタイミングで分裂し、胚内には同じ世代の細胞のみが存在する。一方、異常な受精卵の卵割については、同じ世代の細胞であっても分裂するタイミングがずれて、胚内には異なる世代の細胞が混在してしまう。
【0073】
ステップS140では、上記選別した受精卵(胚盤胞と称される状態にまで成長した良好な受精卵)を採取して、例えばマイナス196℃の液体窒素の中で凍結保存する。そして、この受精卵(胚盤胞)は所定の周期のときに母体へ戻される(胚移植される)。なお、培養される受精卵は、ヒト、ウシ、ウマ、ブタ、マウス等の受精卵であってもよい。また、受精卵の保存は胚盤胞の状態で保存してもよいし、分割期(4細胞期胚、8細胞期胚)の状態で保存してもよい。
【0074】
以上説明したように、本実施形態に係る画像処理プログラムGP、この画像処理プログラムGPが実行されることにより構成される画像処理方法及び画像処理装置100、並びに受精卵の製造方法によれば、受精卵の画像特徴量そのものを比較するのではなく、異なるフォーカス面から取得された複数の観察画像間における画像特徴量の変化に基づいて受精卵を判別するため、解像度の低い低倍画像からでも受精卵を正確に検出することができる。従って、広視野の観察範囲を利用して観察対象である受精卵を高速かつ頑健に認識することが可能になる。また、低倍観察によって観察範囲が広くなることで試料台を駆動する回数が減少するため、培養容器に無用な振動等を与えることもなく、受精卵に与えるダメージを最小限に抑えることができる。
【0075】
なお、上述の実施形態では、最外輪郭の大きさS及び内輪帯の輝度総和V、の2つの画像特徴量に基づいて受精卵を認識する処理方法を例示したが、本発明はこの実施形態に限定されるものではなく、上記特徴量のうちのいずれか1つの特徴量に基づいて認識する方法や、他の特徴量(内部テクスチャの特徴量など)に基づいて認識する方法、更に他の特徴量を付加して3つ以上の複数の特徴量に基づいて認識する方法に適用しても、同様の効果を得ることができる。他の特徴量としては、受精卵には内部構造(卵細胞)が必ず存在するという属性を利用して、例えば内部構造のテクスチャ特徴量を用いてもよい。ここで、テクスチャ特徴量としては、すでに公知の種々の指標を用いることができ、その一例としては、(1)輝度値の分散、(2)微分の総和、(3)上下、左右、回転対称性(相関値)、(4)方向成分(ガボールフィルタなど)、(5)テクスチャ解析などである。
【0076】
また、上述の実施形態において、低倍画像として観察倍率2倍程度の画像を例示しているが、本発明はこの実施形態に限定されるものではなく、例えば、観察対象の受精卵(透明帯、卵細胞、胚など)の大きさに応じて適宜な倍率を用いることができ、具体的な観察倍率の数値としては観察対象物などとの関係で適宜変更される。
【0077】
また、上述の実施形態では、1個の培地ドロップDに対して受精卵が1個注入され、培地ドロップDの中から1個の受精卵を検出する構成を例示したが、本発明はこの実施形態に限定されるものではなく、培地ドロップDに注入される複数の受精卵を全て検出するように構成してもよい。
【符号の説明】
【0078】
BS 培養観察システム GP 画像処理プログラム
a 受精卵 5 観察ユニット
6 制御ユニット 7 操作盤
10 培養容器 11 ディッシュ
55 顕微観察系 55c 撮像装置
61 CPU 62 ROM
63 RAM 80 位相差顕微鏡
84 対物レンズ 100 画像処理装置
140 画像解析部 150 出力部
【技術分野】
【0001】
本発明は、受精卵観察において取得された観察画像から受精卵と異物とを自動判別する画像処理手段、及びこれを利用した受精卵の製造方法に関する。
【背景技術】
【0002】
近年、生殖補助医療技術(ART)の発展に伴い、体外受精による受精卵を培養しながらその生育状態を観察することが行われている。受精卵などの培養物の状況を観察する装置の例として、培養顕微鏡が挙げられる(例えば、特許文献1を参照)。培養顕微鏡は、受精卵の培養に好適な環境を形成する培養装置(インベキュータ)と、培養装置に収容された培養容器内の受精卵の状態を顕微観察する顕微観察系とを備え、予め設定された一定時間ごとに受精卵の観察画像を取得し、ユーザが受精卵を目視により認識した上で、受精卵の生育状態の観察、記録、管理等を自動で行うことができるように構成される。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−229619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような装置において、培養容器中の受精卵の生育状態を顕微観察する場合、培地の中から観察対象である受精卵を検出しなければならないが、培地には受精卵の他にもゴミやオイル粒等の異物が混入しているため、受精卵とそれ以外の異物とを判別して受精卵を認識するには、できる限り高倍率での顕微観察が必要になる。しかしながら、高倍観察になるほど解像度の高い画像を取得することができるものの、高倍観察になるにつれて観察視野(観察範囲)が狭くなり視野内に受精卵の像が写し込まれる確率が低くなるため、受精卵を検出するのに広視野領域において多数の高倍画像の撮影が必要になるとともに、その多数の画像の中から受精卵を識別する複雑な処理が必要となり、受精卵の検出に長時間を要するという問題があった。そのため、できる限り広視野を確保した低解像度の画像であっても受精卵を正確に認識することが可能な手段が求められている。
【0005】
本発明は、上記のような課題に鑑みてなされたものであり、低倍観察において受精卵を高速且つ頑健に認識する手段を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明を例示する第1の態様に従えば、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得し、観察画像に写し込まれた複数の物体を抽出し、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理方法が提供される。
【0007】
本発明を例示する第2の態様に従えば、コンピュータにより読み取り可能であり、撮像装置により撮影されて画像を取得して画像処理する画像処理装置としてコンピュータを機能させるための画像処理プログラムであって、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得するステップと、観察画像に写し込まれた複数の物体を抽出するステップと、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップと、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップと、物体に対する認識結果を外部に出力するステップとを、コンピュータに実現させることを特徴とする受精卵観察の画像処理プログラムが提供される。
【0008】
本発明を例示する第3の態様に従えば、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら複数の物体を撮影する撮像装置と、光学的距離を変化させて撮像装置により撮影された複数の観察画像の各々から複数の物体を抽出し、複数の物体の中から受精卵を認識する画像解析部と、画像解析部により判断された認識結果を外部に出力する出力部とを備え、画像解析部が、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理装置が提供される。
【0009】
本発明を例示する第4の態様に従えば、所定の環境条件で受精卵を培養し、受精卵が存在する培養容器中から、上記構成の画像処理装置を用いて受精卵を識別することを特徴とする受精卵の製造方法が提供される。
【0010】
本発明を例示する第5の態様に従えば、所定の環境条件で受精卵を培養し、受精卵が存在する培養容器中において、観察視野内に位置する受精卵を含む複数の物体と当該複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により複数の物体を撮影した複数の観察画像を取得し、観察画像に写し込まれた複数の物体を抽出し、観察画像に含まれる物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵の製造方法が提供される。
【発明の効果】
【0011】
このような受精卵観察の画像処理方法、画像処理プログラム及び画像処理装置、並びに受精卵の製造方法によれば、観察対象の受精卵を高速且つ頑健に認識することが可能になる。
【図面の簡単な説明】
【0012】
【図1】画像処理プログラムの概要を示すフローチャートである。
【図2】本発明の適用例として示す培養観察システムの概要構成図である。
【図3】上記培養観察システムのブロック図である。
【図4】(A)は培養容器を示す平面図であり、(B)はディッシュを示す斜視図である。
【図5】位相差顕微鏡の概要構成図である。
【図6】受精卵とそれ以外の異物との特徴を説明するための図である。
【図7】フォーカス面を順次変更して受精卵を撮影した複数の観察画像を示す模式図である。
【図8】受精卵の輪郭部での回折現象を説明するための模式図である。
【図9】画像の特徴量算出の対象となる領域を説明するための模式図である。
【図10】フォーカス面座標を変化させたときの面積S及び輝度総和Vの変化を表すグラフである。
【図11】画像処理装置の概要構成を示すブロック図である。
【図12】受精卵の製造方法の概要を示すフローチャートである。
【発明を実施するための形態】
【0013】
以下、本発明を実施するための形態について、図面を参照しながら説明する。本実施形態に係る画像処理装置を適用したシステムの一例として、培養観察システムの概要構成図及びブロック図を、それぞれ図2及び図3に示す。
【0014】
培養観察システムBSは、大別的には、筐体1の上部に設けられた培養室2と、複数の培養容器10を収容保持する棚状のストッカー3と、培養容器10内の試料を観察する観察ユニット5と、培養容器10をストッカー3と観察ユニット5との間で搬送する搬送ユニット4と、システムの作動を統括的に制御する制御ユニット6と、画像表示装置を備えた操作盤7などから構成される。
【0015】
培養室2は、培養環境を形成する部屋であり、環境変化やコンタミネーションを防止するためサンプル投入後は密閉状態に保持される。培養室2に付随して、培養室2内の温度を昇温・降温させる温度調整装置21、湿度を調整する加湿器22、CO2ガスやN2ガス等のガスを供給するガス供給装置23、培養室2全体の環境を均一化させるための循環ファン24、培養室2の温度や湿度、二酸化炭素濃度等を検出する環境センサ25などが設けられている。各機器の作動は制御ユニット6により制御され、培養室2の温度や湿度、二酸化炭素濃度等により規定される培養環境が、操作盤7において設定された培養条件に合致した状態に維持される。
【0016】
ストッカー3は、図2における紙面直行の前後方向、及び上下方向にそれぞれ複数に仕切られた棚状に形成されている。各棚にはそれぞれ固有の番地が設定されており、例えば前後方向をA〜C列、上下方向を1〜7段とした場合に、A列5段の棚がA−5のように設定される。
【0017】
培養容器10は、培養物の種類や目的等に応じてフラスコやディッシュ、ウェルプレートなど適宜なものが選択され、本実施形態では、図4(A)に示すように、透光性の材質で形成された直径約35mmの5つのディッシュ11(容器11a及び蓋11bからなる)と、ディッシュ11を保持するホルダ12とを備えた構成を例示しており、図4(B)に示すように、培養物たる受精卵Jは、pHに応じて変色するフェノールレッドなどのpH指示薬が入った培地ドロップAとともに各ディッシュ11に注入される。ディッシュ11の底面には、ピペット等により滴下された20[μl]程度の培地ドロップDが1〜複数個形成されており(図4(B)では3個を図示)、培地ドロップDはディッシュ11内において無色透明のミネラルオイルOによって浸された状態となっている。それぞれの培地ドロップD内には、例えば対外受精のために同一母体から同時期に採卵された受精卵Jが1個(または複数個)ずつ挿入されている。また、培養容器10にはコード番号が付与され、ストッカー3の指定番地に対応づけて収容される。
【0018】
搬送ユニット4は、培養室2の内部に設けられて上下移動可能なZステージ41、前後移動可能なYステージ42、左右移動可能なXステージ43などからなり、Xステージ43の先端側に培養容器10を持ち上げ支持する支持アーム45が設けられている。搬送ユニット4、支持アーム45がストッカー3の全棚と観察ユニット5との間を移動可能な移動範囲を有して構成される。
【0019】
観察ユニット5は、試料台15の下側から試料を照明する第1照明部51、顕微観察系の光軸に沿って試料台15の上方から試料を照明する第2照明部52、下方から試料を照明する第3照明部53、試料のマクロ観察を行うマクロ観察系54、試料のミクロ観察を行う顕微観察系55、及び画像処理装置100(図11を参照)などから構成される。試料台15は、透光性を有する材質で構成されるとともに観察領域に透明な窓部16が設けられている。また、試料台15は、制御ユニット6からの作動制御によりXY方向(水平面内方向)およびZ方向(上下方向)に移動可能な微細駆動ステージからなり、その上面部に載置された培養容器10をXY方向に移動させることにより、培養容器10をマクロ観察系54の光軸上へ挿入したり、顕微観察系55の光軸上へ挿入したりすることが可能になっている。
【0020】
第1照明部51は、下部フレーム1b側に設けられた面発光の光源からなり、試料台15の下側から培養容器10全体をバックライト照明する。第2照明部52は、LED等の光源52aと、位相リングやコンデンサレンズ等からなる照明光学系52cとを有して培養室2に設けられており、試料台15の上方から顕微観察系55の光軸に沿って培養容器10中の試料を照明する。第3照明部53は、それぞれ落射照明観察や蛍光観察に好適な波長の光を射出する複数のLEDや水銀等の光源と、各光源から射出された光を顕微観察系55の光軸に重畳させるビームスプリッタや蛍光フィルタ等からなる照明光学系とを有して、培養室2の下側に位置する下部フレーム1b内に配設されており、試料台15の下方から顕微観察系55の光軸に沿って培養容器10中の試料を照明する。
【0021】
マクロ観察系54は、観察光学系54aと、この観察光学系54aにより結像された試料の像を撮影するCCDカメラ等の撮像装置54cとを有し、第1照明部51の上方に位置して培養室2内に設けられている。マクロ観察系54は、第1照明部51によりバックライト照明された培養容器10の上方からの全体観察画像(マクロ画像)を撮影する。
【0022】
顕微観察系55は、対物レンズ84や位相リング82等(図5を参照)からなる観察光学系55aと、観察光学系55aにより結像された試料の像を撮影する冷却CCD等の撮像装置55cとを有し、下部フレーム1bの内部に配設されている。上記の第2照明部52と顕微観察系55とにより位相差観察用の顕微鏡80が構成される。対物レンズ84はレンズ駆動機構87(図5を参照)により光軸に沿う方向(Z方向)に往復移動可能に構成されており、対物レンズ84(観察光学系55a)と試料面との光軸方向の相対位置(光学的距離)を変化させることが可能になっている。レンズ駆動機構87としては、例えばステッピングモータや、ピエゾアクチュエータ(ピエゾ素子)等が利用される。なお、本実施形態では、対物レンズ84を光軸方向に移動させることにより試料面との相対位置を変化させているが、試料台15を光軸方向に移動させたり、対物レンズ84と試料台15との両方を光軸方向に移動させてもよい。
【0023】
また、対物レンズ84は複数設けられるとともに、詳細図示を省略するレボルバやスライダなどの変位機構を用いて複数倍率に設定可能に構成されており、初期選択のレンズ設定に応じて、本実施形態では少なくとも低倍観察用(例えば2倍観察用)と高倍観察用(例えば10倍観察用)との2種類の倍率の間で変倍可能なように切り換えられる。顕微観察系55は、第2照明部52により照明された試料の透過光による位相差画像や、第3照明部53により照明されて試料が発する蛍光による蛍光画像など、培養容器10内の試料を顕微鏡観察した顕微観察画像(ミクロ画像)を撮影する。なお、詳細は後述するが、本実施形態では受精卵の検出効率を向上させるために、低倍観察用の対物レンズを用いて観察することを特徴としている。
【0024】
画像処理装置100は、マクロ観察系54の撮像装置54c及び顕微観察系55の撮像装置55cから入力された信号をA/D変換するとともに、各種の画像処理を施して全体観察画像または顕微観察画像の画像データを生成する。また、画像処理装置100は、これらの観察画像(全体観察画像及び顕微観察画像)の画像データに対して画像解析を施し、画像中に存在するオブジェクトの抽出や、オブジェクトの画像特徴量の算出、受精卵の識別等の画像処理を行う。画像処理装置100は、具体的には、次述する制御ユニット6のROMに記憶された画像処理プログラムが実行されることにより構築される。なお、この画像処理装置100については、後に詳述する。
【0025】
制御ユニット6は、処理を実行するCPU61、培養観察システムBSの制御プログラムや制御データ等が設定記憶されたROM62、観察条件や画像データ等を一時記憶するRAM63などを有し、培養観察システムBSの作動を制御する。そのため、図3に示すように、培養室2、搬送装置4、観察ユニット5、操作盤7の各構成機器が制御ユニット6に接続されている。RAM63には、観察プログラムに応じた培養室2の環境条件や、観察スケジュール、観察ユニット5における観察種別や観察位置、観察倍率等が設定され記憶される。また、RAM63には、観察ユニット5により撮影された画像データを記録する画像データ記憶領域が設けられ、培養容器10のコード番号や撮影日時等を含むインデックス・データと画像データとが対応付けて記録される。
【0026】
操作盤7には、キーボードやスイッチ等の入出力機器が設けられた操作パネル71、操作画面や画像データ等を表示する表示パネル72が設けられ、操作パネル71において観察プログラムの設定や条件選択、動作指令等の入力が行われる。通信部65は有線または無線の通信規格に準拠して構成されており、この通信部65に外部接続されるコンピュータ等との間でデータの送受信が可能になっている。
【0027】
このように概要構成される培養観察システムBSでは、操作盤7において設定された観察プログラムの設定条件に従い、CPU61がROM62に記憶された制御プログラムに基づいて各部の作動を制御するとともに、培養容器10内の試料の撮影を自動的に実行する。すなわち、操作パネル71に対するパネル操作(または通信部65を介したリモート操作)によって観察プログラムがスタートされると、CPU61が、RAM63に記憶された環境条件の各条件値を読み込むとともに、環境センサ25から入力される培養室2の環境状態を検出し、条件値と実測値との差異に応じて温度調整装置21、加湿器22、ガス供給装置23、循環ファン24等を作動させて、培養室2の温度や湿度、二酸化炭素濃度などの培養環境についてフィードバック制御が行われる。
【0028】
また、CPU61は、RAM63に記憶された観察条件を読み込む、観察スケジュールに基づいて搬送ユニット4のX,Y,Zステージ41,42,43を作動させてストッカー3から観察対象の培養容器10を観察ユニット5の試料台15に搬送して、観察ユニット5による観察を開始させる。例えば、観察プログラムにおいて設定された観察がマクロ観察である場合には、搬送ユニット4によりストッカー3から搬送してきた培養容器10をマクロ観察系54の光軸上に位置決めして試料台15に載置し、第1照明部51の光源を点灯させて、バックライト照明された培養容器10の上方から撮像装置54cにより全体観察像を撮影する。撮像装置54cから制御ユニット6に入力された信号は、画像処理装置100により処理されて全体観察画像が生成され、その画像データが撮影日時等のインデックス・データなどとともにRAM63の画像データ記憶領域に記憶される。
【0029】
また、観察プログラムにおいて設定された観察が、培養容器10内の特定位置の試料のミクロ観察である場合には、搬送ユニット4により搬送してきた培養容器10内の特定位置を顕微観察系55の光軸上に位置決めして試料台15に載置し、第2照明部52または第3照明部53の光源を点灯させて、透過照明、落射照明、蛍光による顕微観察像を撮像装置55cに撮影させる。撮像装置55cにより撮影されて制御ユニット6に入力された信号は、画像処理装置100により処理されて顕微観察画像(位相差画像、蛍光画像等)が生成され、その画像データが撮影日時等のインデックス・データなどとともにRAM63の画像データ記憶領域に記憶される。
【0030】
CPU61は、上記のような全体観察像の撮影や顕微観察像の撮影を、観察プログラムに設定された観察スケジュールに基づいて順次実行する。RAM63に記憶された画像データは、操作パネル71から入力される画像表示指令に応じてRAM63から読み出され、例えば指定時刻の全体観察画像や顕微観察画像、画像解析の解析結果などが表示パネル72に表示される。
【0031】
続いて、このように構成される培養観察システムBSにおいて、第2照明部52と顕微観察系55とにより構成される位相差顕微鏡80について概要説明する。ここで、図5は位相差顕微鏡80の構成を示す模式図である。位相差顕微鏡80は、第2照明部52において培養室2内に設けられた光源52a及び照明光学系52cと、顕微観察系55において下部フレーム1b内に設けられた観察光学系55a及び撮像装置55cとを有して構成される。
【0032】
照明光学系52cは、光源側から順に、コレクタレンズ81、輪帯絞り82及びコンデンサレンズ83を備えている。観察光学系55aは、光源側から順に、対物レンズ84、位相リング85及び結像レンズ86を備えている。
【0033】
位相差顕微鏡80において、光源52aから射出された照明光は、コレクタレンズ81により略平行光束に変換され、輪帯形状(リング形状)のスリットが設けられた輪帯絞り82に入射する。輪帯絞り82のスリットを通過した光は、コンデンサレンズ83によって集光され、試料台15に載置された培養容器10(ディッシュ11)内の試料に照射される。
【0034】
試料に照射された照明光は、試料を通過する直接光と、位相物体である試料により回折される回折光とに分かれる。この回折現象は屈折率に変化のある部位で発生するため、当該回折光は、受精卵Jと培地ドロップDとの境界部分、受精卵Jの内部構造等、の位相物体(受精卵J)の形状情報を含んでおり、この回折により照明光に対して位相が1/4波長だけ遅れることになる。これら直接光及び回折光は対物レンズ84により集光されて、輪帯絞り82と光学的に共役な位置に配置された位相リング85に入射する。
【0035】
位相リング85に入射する光のうち直接光は、輪帯絞り82のスリットとほぼ同じ形状(リング状)に形成された位相板85aに入射して、位相板85aによって光の一部が吸収されて光量が弱められるとともに、位相が照明光の1/4波長だけずらされる。一方、位相リング85に入射する光のうち回折光は、位相板85a以外の部分をそのまま透過する。位相リング85を通過した直接光及び回折光は結像レンズ86により結像されて、撮像装置55cの撮像面上で干渉する。このとき、直接光の位相は位相板85aによって1/4波長だけずれているため、直接光と回折光との位相差は1/2波長もしくは0になっており、その干渉によって位相の変化を光の明暗として可視化される。これにより、撮像装置55cの撮像面上には明暗のコントラストがついた試料(受精卵J)の拡大像が形成され、撮像装置55cにより撮影されることになる。
【0036】
このとき、上述したように、対物レンズ84はレンズ駆動機構87によって光軸に沿った方向(Z方向)に往復移動可能であり、試料と対物レンズ84(観察光学系55a)との相対位置(光学的距離)が変化するようになっている。これに対し、撮像装置55cは試料の撮影を連続的に行うため、対物レンズ84の移動に応じてコントラストが変化する複数の画像を所定の撮像ピッチで撮影することができる。これにより、1つの試料に対して異なるフォーカス面から取得された複数の観察画像を得ることができる。
【0037】
ここで、撮像装置55cはCCDやCMOS等の撮像素子を搭載しており、撮像素子の撮像面上に形成された試料の拡大像を撮像して得られた画像信号を画像処理装置100へ出力する。また、画像処理装置100には、撮像装置55cからの画像信号の他に、試料台(微細駆動ステージ)15に内蔵されたエンコーダ15a(図10を参照)及びレンズ駆動機構87のコントローラに内蔵されたセンサー87a(図10を参照)からの位置検出信号が入力される。そのため、試料を撮像したときの試料台15の位置(X,Y方向位置)と対物レンズ84の位置(Z方向位置)とを知ることができる。
【0038】
以上のように構成される培養観察システムBSにおいて、画像処理装置100は、培養容器10内における受精卵の生育状態等の観察を実行するため、観察画像から観察対象となる受精卵とそれ以外のゴミや気泡等の異物(非対象物)とを判別して、受精卵を認識する機能を備えている。
【0039】
ここで、培地ドロップD内の混入物は、ゴミ(培地の残りかす)、オイル粒(ディッシュ11内に充填されるミネラルオイルOが培地に入り込んだもの)、及び気泡に大別される。ここで、図6にも示すように、受精卵、ゴミ、オイル粒、及び気泡の各々は次のような特徴を持っている。
【0040】
(受精卵の特徴)
受精卵は、その輪郭部に膜(「透明帯」と称する)が存在する、外形が球形状を有している、輪郭内部に内部構造(卵細胞)が存在している、という特徴を持つ。
【0041】
(ゴミの特徴)
ゴミは、その輪郭部に透明帯が存在しない、位相差画像では輪郭部にハロが現れる、輪郭内部の構造は不定である、という特徴を持つ。
【0042】
(オイル粒、気泡の特徴)
オイル粒及び気泡は、その輪郭部に透明帯が存在しない、位相差画像では濃淡が強めにでる、外形が球形状や楕円形状である、輪郭内部の構造が少ない、という特徴を持つ。
【0043】
このように受精卵は最外輪郭を形成する透明帯を持つという属性を有しており、対物レンズ84を光軸方向に駆動させて、顕微観察(位相差観察)によって異なるフォーカス面の観察画像を撮影したとき、そのフォーカス面のZ位置によっては受精卵の輪郭部で屈折率の変化がほとんど生じずに明暗のコントラストとして現れない画像、すなわち透明体(及びその輪郭部)が視認できない画像が得られる。
【0044】
これについて、図7及び図8を追加参照して簡単に説明する。なお、図7はフォーカス面を順次変更して撮影した複数の観察画像を示す模式図であり、図8は受精卵の輪郭部での回折現象を説明するための模式図である。なお、これらの図においてはZ軸がフォーカス面座標と一致する。位相差観察における回折現象は、前述したように屈折率変化のある部位、例えば、受精卵(位相物体)と培地ドロップDとの境界部分や、受精卵の内部構造の部分で発生する。ここで図8に示すように、受精卵Jをほぼ球形として考えた場合、受精卵Jの輪郭部(透明帯の膜部分)において、球の中心Xを通る基準のフォーカス面(例えばZ=0)では、輪郭部が垂直方向成分となるため、屈折率変化(回折現象)がほとんどなく、明暗のコントラストが生じない。その結果、図7に示すように、透明帯(及びその輪郭部)の像が見かけ上消失することになる。一方、フォーカス面を上下(例えばZ=±ΔZ)に振ると、輪郭部での屈折率変化によって回折光を生じ、透明帯(及びその輪郭部)が明暗のコントラストが付いた像として見えることになる。これに対して、ゴミやオイル粒等の異物では透明帯を持たず、輪郭部での屈折率も一様に高く安定しているため、フォーカス面のZ位置によらず常に輪郭部が写し込まれることになる。
【0045】
そのため、異なるフォーカス面から取得された複数の観察画像間において透明帯の像の出没を検出することで受精卵を認識することとする。ここで、観察画像において受精卵の透明帯が出現するときは、当然ながら透明帯の外側の輪郭が最外輪郭となって面積が相対的に大きくなるとともに、その最外輪郭の内側(すなわち、透明帯)の輝度が相対的に高くなる。一方、透明帯が画像から消失するときには、内部構造(図8においては卵細胞C)の輪郭が最外輪郭となって面積が相対的に小さくなるとともに、その最外輪郭の内側(卵細胞)の輝度が相対的に低くなる。そこで、最外輪郭の大きさ及びその内側の輝度を受精卵固有の特徴量として設定し、フォーカス面を振ったときの特徴量の変化に基づいて受精卵を識別する。
【0046】
本実施形態において、画像処理装置100による受精卵観察の画像処理方法は、異なるフォーカス面の複数の観察画像を取得し、各観察画像に写し込まれる物体(オブジェクト)に対して受精卵固有の属性に基づく画像特徴量(以下に詳述する、I.最外輪郭の大きさ、II.内輪帯の輝度総和)を算出し、観察画像に応じて画像特徴量が変化(すなわち透明帯の像が出没)する物体を受精卵であると認識するように構成される。それでは、以下にこの画像処理方法について基本的な概念から説明する、なお、以降の説明では、第2照明部52及び顕微観察系55等によって構成される位相差顕微鏡80によって撮影される位相差画像(顕微観察画像)に基づいて受精卵の観察を行う場合を例示する。
【0047】
(オブジェクトの抽出)
まず、撮像装置55cにより撮影された異なるフォーカス面となる複数の観察画像(位相差画像)に対して、例えば分散フィルタまたはSnakesやLevel Set法などといった動的輪郭抽出手法を適用して、観察画像内に含まれる物体(受精卵及び異物の領域)の最外輪郭を抽出し、その輪郭に囲まれた閉じた領域をオブジェクトとして抽出してセグメンテーションを行う。こうしてセグメント化された各オブジェクトに対して、個々のオブジェクトを区別可能なように固有の標識としてラベルを割り当てる。なお、フォーカス面を振った複数の観察画像においては、同一のオブジェクトが相互に写し込まれているため、観察画像間で同一性のあるオブジェクトについては同一のラベルを付与する対応付けがなされる。
【0048】
(特徴量算出)
ラベリング処理を施した各オブジェクトに対し、受精卵の属性に基づく画像の特徴量として、I.最外輪郭の大きさ、II.内輪帯部分の輝度総和、を計算する。なお、各オブジェクトの特徴量は観察画像単位で計算され、同一のオブジェクトであっても1つの観察画像に対して各特徴量が1つずつ計算される。なお、図9に上記の特徴量算出の対象となる部分を説明するための模式図を示す。
【0049】
I.最外輪郭の大きさ
オブジェクトの最外輪郭の大きさとして、オブジェクト領域の面積、すなわち最外輪郭内部の面積Sを算出する(図9(A)に斜線で示す部分の面積)。
【0050】
II.内輪帯の輝度総和
観察画像(元画像)において、オブジェクトの最外輪郭内側に輪帯部分(「内輪帯」と称する)の領域(図9(B)に斜線で示す領域)を設定し、この内輪帯の輝度値(例えば、8ビット階調の場合に0〜255)の総和である輝度総和Vを算出する。例えば、オブジェクトが受精卵である場合には、内輪帯の部分が透明帯にほぼ一致し、透明帯の輝度値の総和を算出することになる。内輪帯の幅としては、過去のサンプリングデータ等から既知である受精卵の透明帯の幅に相当する大きさを、観察倍率等の画像取得条件に応じて設定する(例えば、数ピクセル分の幅)。なお、各オブジェクトの画像に対して収縮処理を施したマスク画像を生成し、原画像とマスク画像との差分画像の部分を内輪帯部分として特定してもよい。
【0051】
以上の2つの特徴量は、ラベリングされたオブジェクトごとに求められ、これを基に複数のオブジェクトの中から受精卵を決定する。
【0052】
(受精卵の識別)
受精卵候補となる各オブジェクトについて、複数の観察画像に対する特徴量の変化を計算する。各オブジェクトはフォーカス位置の異なる複数の観察画像の各々に写り込んでいるため、各オブジェクトに対して画像の特徴量となる面積S及び輝度総和Vは観察画像の枚数に対応する個数だけ取得されており、これに基づいて複数の観察画像間の同一オブジェクトについての特徴量変化を計算する。
【0053】
ここで、受精卵の画像の特徴量変化の一例として、前述の図7の状態においてフォーカス面のZ位置を変化させたときの面積S及び輝度総和Vの変化を表すグラフを図10に示している。前述したように、フォーカス面のZ位置を変化させて受精卵の観察画像を複数取得した場合、受精卵の持つ透明帯の像が(見た目上)一時的に消失する画像が得られることを考えると、透明帯が写し込まれていない画像に基づいて受精卵の画像の特徴量を算出すると、この特徴量である面積S及び輝度総和Vの値は相対的に小さな値となる。つまり、透明帯(及びその輪郭)が消失することで、画像に写る最外輪郭が内部構造(卵細胞C)の輪郭になるため、面積Sが減少するとともに、卵細胞Cが持つ構造により輝度総和Vも低下することになる。一方、ゴミ、オイル粒、気泡などの異物については透明帯を持たず、輪郭部での屈折率も一様に高く安定しているため、フォーカス面のZ位置によらず常に一定の最外輪郭を写し込めるため、画像の特徴量はほとんど変化することがない。そのため、図10(A),(B)に示すように、複数の観察画像間において面積S及び輝度総和Sが変化するオブジェクト、より詳細には、面積S及び輝度総和Vが一度小さくなってから再び大きくなるように(極小点を持つように)変化するオブジェクトを受精卵であると認識する。
【0054】
このような受精卵の判別手法(画像処理方法)では、解像度の高い高倍画像から画像特徴量を細かく数値化してこの特徴量そのものを比較するのではなく、異なるフォーカス面から取得した複数の観察画像間における画像特徴量の変化に基づいて受精卵を判別する構成であり、解像度の低い低倍画像からでも画像特徴量の顕著な変化は捉えることが可能であるため、受精卵の検出を広範囲な観察視野において高速に行うことができる。
【0055】
なお、ゴミ等の異物の像であってもフォーカス面によっては画像の特徴量が多少変化する場合(例えば、異物が楕円球状の外形を持つ場合の面積S)も考えられるため、特徴量の変化量に対して予め所定の閾値を設定しておき、この閾値未満のオブジェクトをリジェクトするようにしてもよい。また、図7等では、基準フォーカス面(Z=0)に対して撮像ピッチ(サンプリング間隔)としてフォーカス方向にΔZだけ上下に振って観察画像を取得した場合を例示しているが、更に複数の観察画像を連続的に取得するものであってもよい。
【0056】
さらに、ここで用いられる対物レンズ84の条件としては、一般的な動物由来の受精卵の大きさ(例えば、人間の受精卵の場合には直径で約100[μm]程度)を考慮すると、焦点深度の浅い(NA=0.2以上)光学レンズを適用させて、受精卵の透明帯を見た目上消失させる現象を起きやすくさせることが好ましい。
【0057】
次に、培養観察システムBSの画像処理装置100において実行される画像解析の具体的なアプリケーションについて図1及び図11を併せて参照しながら説明する。ここで、図1は受精卵観察の画像処理プログラムGPにおける処理の概要を示すフローチャート、図11は受精卵観察の画像処理を実行する画像処理装置100の概要構成を示すブロック図である。
【0058】
画像処理装置100は、試料台15及びレンズ駆動機構87等の作動を制御する駆動制御部110と、撮像装置55cにより撮影された観察画像を取得して記憶する画像記憶部120と、観察画像に写し込まれたオブジェクトごとに算出される画像の特徴量を記憶する特徴量記憶部130と、観察画像を解析して観察画像に写し込まれた複数のオブジェクトの中から受精卵を認識する画像解析部140と、画像解析部140により解析された判断結果を外部に出力する出力部150とを備え、画像解析部140により判断された受精卵であるか否かの判断結果を、例えば表示パネル72に出力して表示させるように構成される。画像処理装置100は、ROM62に予め設定記憶された画像処理プログラムGPがCPU61に読み込まれ、CPU61によって画像処理プログラムGPに基づく処理が順次実行されるように構成される。
【0059】
記述したように、培養観察システムBSでは、観察プログラムにおいて設定された観察条件に従って、所定時間ごとに指定された培養容器10内の受精卵観察が行われる。具体的に、CPU61は、搬送ユニット4の各ステージ41,42,43を作動させてストッカー3から観察対象の培養容器10を観察ユニット5に搬送(本実施形態では、顕微観察系55の光軸上に配置)する。
【0060】
画像処理装置100は、先ず始めにステップS1として、顕微観察系55の撮像装置55cによりディッシュ11内の所望の培地ドロップDの観察領域を撮像するために、駆動制御部110によって、試料台15を面内方向(X,Y方向)に駆動させる。ここで、低倍観察用(2倍観察用)の対物レンズによる視野サイズは培地ドロップ1個分のサイズよりも小さく、培地ドロップD1個分の視野をカバーするための必要な撮像枚数としては、例えば2×2〜3×3程度であるため、試料台15をX,Y方向に所定の移動ピッチでステップ状に駆動させて、試料(培地ドロップD)と対物レンズ84との位置決めを行う。
【0061】
ステップS2では、駆動制御部110によって、レンズ駆動機構87を駆動させて対物レンズ84を光軸方向に沿って移動させながら、撮像装置55cに所定の撮像ピッチで位相差画像(観察画像)を撮影させる。なお、対物レンズ84を往復移動させて撮像装置55cにより多数の観察画像を取得したり、連続的に撮影して動画として取得するものでもよいが、一般的な受精卵の大きさから撮像位置を予め設定しておき、受精卵を識別するために必要な枚数(本実施形態では3枚)だけを取得するものでもよい。例えば、受精卵が自重でディッシュ11の底面まで沈んでいるときには、ディッシュ11の底面から既知の受精卵の大きさの半分(受精卵を球と仮定したときの半径値に相当する)だけ上方の位置に基準フォーカス面(Z=0)を設定し、この基準フォーカス面と、そこから撮像ピッチとして受精卵の大きさの1/4(受精卵の大きさ等によって任意に設定可)だけ上下に振った位置(すなわち、Z=±ΔZの位置)との3か所でのみ撮影を行うものでもよい。
【0062】
ステップS3では、撮像装置55cから取得した複数の観察画像が、試料台15のリニアエンコーダ15aやレンズ駆動機構87のセンサー87aから出力される当該撮像が行われたときの位置情報とともに、培養容器10のコード番号や観察位置、観察時刻などのインデックス・データと対応付けられて画像記憶部120に保存される。
【0063】
ステップS4では、画像解析部140によって、画像記憶部120に記憶された各観察画像に対し、例えば、分散フィルタを施したのち二値化する手法や、動的輪郭抽出手法(SnakesやLevel Set法)などの最外輪郭抽出処理が実行され、各観察画像内に含まれるオブジェクトの最も外側の輪郭が抽出される。また、このように最外輪郭が抽出された各オブジェクトに対してラベリングが施され、複数の観察画像間で同一性があると判断されたオブジェクトに対しては同一のラベルを付与することによって対応付けがなされる。
【0064】
ステップS5では、画像解析部140によって、各オブジェクトに対して観察画像ごとに、最外輪郭の大きさ(面積S)、及び内輪帯の輝度総和Vがそれぞれ算出される。特徴量記憶部120には、オブジェクトごとに割り当てたラベルと、画像解析部140により算出された画像の特徴量(面積S及び輝度総和V)とが対応付けられた状態で記憶される。
【0065】
ステップS6では、画像解析部140によって、各オブジェクトに対して複数の観察画像間における最外輪郭の大きさS及び内輪帯部分の輝度総和Vの変化量が計算される。
【0066】
ステップS7では、画像解析部140によって、各オブジェクトの特徴量の変化量に基づいて受精卵であるか否かが判定され、特徴量に顕著な変化があったラベルのオブジェクトが受精卵であると認識される。例えば、フォーカス面座標(Z)に対する面積S及び輝度総和Vの変化に極小点が存在する場合、変化量が所定の閾値を超えた場合などに、その特徴量を持つオブジェクトを受精卵であると認識する。
【0067】
ステップS8では、出力部150によって、画像解析部140において判断された受精卵の識別結果が出力される。出力部150から出力された判断結果は、操作盤7の表示パネル72に表示され、画像解析部140によって受精卵であると判断されたオブジェクトに受精卵を示す識別表示がされる。
【0068】
具体的な表示方法として、例えば、受精卵であることを示す記号を付加して表示したり、受精卵とそれ以外の異物とを異なる色相や輝度で表示したり、異物のみを塗りつぶして表示したり、異物の写り込みを除去した画像を表示する等により、受精卵とそれ以外の異物とを明瞭に判別して表示する、などのインターフェースが例示される。なお、出力部150から出力される上記のような判別データを、通信部65を介して外部接続されるコンピュータ等に送信して、同様の画像を表示させたり、受精卵の生育状態を観察するための基礎データとして用いたりするように構成することができる。
【0069】
これにより、観察者は、表示パネル72に表示された画像や外部接続されたコンピュータ等のモニタに表示された画像を参照することにより、観察中の(または既に観察画像の取得を終了した)各画像に含まれるオブジェクトが受精卵であるか否かを直ちに判断することができる。また、このようにして受精卵とそれ以外の異物とが判別されたデータを用いることにより、受精卵の生育状態を効率的に観察することが可能になる。
【0070】
次に、受精卵の製造方法について図12を追加参照して概要説明する。まず、ステップS110において、受精卵を培地ドロップDと共に培養容器10(ディッシュ11)内に注入し、この培養容器10を受精卵の培養に適した環境条件に維持された培養室2内に収納して、当該環境条件の下で受精卵を培養する。なお、この環境条件は、制御ユニット6において培養室2内の温度や湿度、二酸化炭素濃度等が受精卵の培養環境に合わせて調節される。
【0071】
ステップS120では、培養容器10内の受精卵の観察として、前述した画像処理のステップS1〜S8(図1を参照)を実行して、培地ドロップDごとに観察画像に写し込まれる複数のオブジェクトの中から受精卵を識別する。このとき培養容器10(ディッシュ11)内において、1個の培地ドロップDに対して受精卵が各1個(又は複数個)ずつ識別される。
【0072】
続いて、ステップS130では、培地ドロップDごとに識別された複数の受精卵を所定の選別基準に基づいて選別する。受精卵の選別基準としては、卵割のタイミングや卵割球の形態等に基づいて受精卵のグレードが判定されて、この選別基準を満足する良好なものが選別される。例えば、良好な生育状態を経たものとして、卵内全ての卵細胞において卵割の起きたタイミングが同時期であるか否かに基づいて行われる。すなわち、正常な受精卵の卵割については、同じ世代の各細胞はほぼ同時期のタイミングで分裂し、胚内には同じ世代の細胞のみが存在する。一方、異常な受精卵の卵割については、同じ世代の細胞であっても分裂するタイミングがずれて、胚内には異なる世代の細胞が混在してしまう。
【0073】
ステップS140では、上記選別した受精卵(胚盤胞と称される状態にまで成長した良好な受精卵)を採取して、例えばマイナス196℃の液体窒素の中で凍結保存する。そして、この受精卵(胚盤胞)は所定の周期のときに母体へ戻される(胚移植される)。なお、培養される受精卵は、ヒト、ウシ、ウマ、ブタ、マウス等の受精卵であってもよい。また、受精卵の保存は胚盤胞の状態で保存してもよいし、分割期(4細胞期胚、8細胞期胚)の状態で保存してもよい。
【0074】
以上説明したように、本実施形態に係る画像処理プログラムGP、この画像処理プログラムGPが実行されることにより構成される画像処理方法及び画像処理装置100、並びに受精卵の製造方法によれば、受精卵の画像特徴量そのものを比較するのではなく、異なるフォーカス面から取得された複数の観察画像間における画像特徴量の変化に基づいて受精卵を判別するため、解像度の低い低倍画像からでも受精卵を正確に検出することができる。従って、広視野の観察範囲を利用して観察対象である受精卵を高速かつ頑健に認識することが可能になる。また、低倍観察によって観察範囲が広くなることで試料台を駆動する回数が減少するため、培養容器に無用な振動等を与えることもなく、受精卵に与えるダメージを最小限に抑えることができる。
【0075】
なお、上述の実施形態では、最外輪郭の大きさS及び内輪帯の輝度総和V、の2つの画像特徴量に基づいて受精卵を認識する処理方法を例示したが、本発明はこの実施形態に限定されるものではなく、上記特徴量のうちのいずれか1つの特徴量に基づいて認識する方法や、他の特徴量(内部テクスチャの特徴量など)に基づいて認識する方法、更に他の特徴量を付加して3つ以上の複数の特徴量に基づいて認識する方法に適用しても、同様の効果を得ることができる。他の特徴量としては、受精卵には内部構造(卵細胞)が必ず存在するという属性を利用して、例えば内部構造のテクスチャ特徴量を用いてもよい。ここで、テクスチャ特徴量としては、すでに公知の種々の指標を用いることができ、その一例としては、(1)輝度値の分散、(2)微分の総和、(3)上下、左右、回転対称性(相関値)、(4)方向成分(ガボールフィルタなど)、(5)テクスチャ解析などである。
【0076】
また、上述の実施形態において、低倍画像として観察倍率2倍程度の画像を例示しているが、本発明はこの実施形態に限定されるものではなく、例えば、観察対象の受精卵(透明帯、卵細胞、胚など)の大きさに応じて適宜な倍率を用いることができ、具体的な観察倍率の数値としては観察対象物などとの関係で適宜変更される。
【0077】
また、上述の実施形態では、1個の培地ドロップDに対して受精卵が1個注入され、培地ドロップDの中から1個の受精卵を検出する構成を例示したが、本発明はこの実施形態に限定されるものではなく、培地ドロップDに注入される複数の受精卵を全て検出するように構成してもよい。
【符号の説明】
【0078】
BS 培養観察システム GP 画像処理プログラム
a 受精卵 5 観察ユニット
6 制御ユニット 7 操作盤
10 培養容器 11 ディッシュ
55 顕微観察系 55c 撮像装置
61 CPU 62 ROM
63 RAM 80 位相差顕微鏡
84 対物レンズ 100 画像処理装置
140 画像解析部 150 出力部
【特許請求の範囲】
【請求項1】
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得し、
前記観察画像に写し込まれた前記複数の物体を抽出し、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理方法。
【請求項2】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項1に記載の受精卵観察の画像処理方法。
【請求項3】
コンピュータにより読み取り可能であり、撮像装置により撮影されて画像を取得して画像処理する画像処理装置として前記コンピュータを機能させるための画像処理プログラムであって、
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得するステップと、
前記観察画像に写し込まれた前記複数の物体を抽出するステップと、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップと、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップと、
前記物体に対する認識結果を外部に出力するステップとを、
前記コンピュータに実現させることを特徴とする受精卵観察の画像処理プログラム。
【請求項4】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項3に記載の受精卵観察の画像処理プログラム。
【請求項5】
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら前記複数の物体を撮影する撮像装置と、
光学的距離を変化させて前記撮像装置により撮影された複数の観察画像の各々から前記複数の物体を抽出し、前記複数の物体の中から受精卵を認識する画像解析部と、
前記画像解析部により判断された認識結果を外部に出力する出力部とを備え、
前記画像解析部が、前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理装置。
【請求項6】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項5に記載の受精卵観察の画像処理装置。
【請求項7】
所定の環境条件で受精卵を培養し、
受精卵が存在する培養容器中から、請求項5又は6に記載の画像処理装置を用いて受精卵を識別することを特徴とする受精卵の製造方法。
【請求項8】
所定の環境条件で受精卵を培養し、
受精卵が存在する培養容器中において、観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得し、
前記観察画像に写し込まれた前記複数の物体を抽出し、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵の製造方法。
【請求項9】
認識された受精卵を所定の選別基準に基づいて選別し、
選別された受精卵を前記培養容器中から採取して保存することを特徴とする請求項7又は8に記載の受精卵の製造方法。
【請求項1】
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得し、
前記観察画像に写し込まれた前記複数の物体を抽出し、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理方法。
【請求項2】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項1に記載の受精卵観察の画像処理方法。
【請求項3】
コンピュータにより読み取り可能であり、撮像装置により撮影されて画像を取得して画像処理する画像処理装置として前記コンピュータを機能させるための画像処理プログラムであって、
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得するステップと、
前記観察画像に写し込まれた前記複数の物体を抽出するステップと、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出するステップと、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識するステップと、
前記物体に対する認識結果を外部に出力するステップとを、
前記コンピュータに実現させることを特徴とする受精卵観察の画像処理プログラム。
【請求項4】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項3に記載の受精卵観察の画像処理プログラム。
【請求項5】
観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら前記複数の物体を撮影する撮像装置と、
光学的距離を変化させて前記撮像装置により撮影された複数の観察画像の各々から前記複数の物体を抽出し、前記複数の物体の中から受精卵を認識する画像解析部と、
前記画像解析部により判断された認識結果を外部に出力する出力部とを備え、
前記画像解析部が、前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵観察の画像処理装置。
【請求項6】
前記受精卵の属性が、受精卵の最外輪郭を形成する膜状の透明帯に関するものであって、
前記撮像装置が位相差観察によって得られる位相差画像を撮影するものであり、
光学的距離を変化させて前記撮像装置により撮影した前記複数の観察画像の中に、フォーカス面を前記受精卵の略中心に位置させた前記透明帯の写り込みのない観察画像を取得することにより、受精卵の画像の特徴量に変化を与えて、当該変化を持つ前記物体を受精卵であると認識することを特徴とする請求項5に記載の受精卵観察の画像処理装置。
【請求項7】
所定の環境条件で受精卵を培養し、
受精卵が存在する培養容器中から、請求項5又は6に記載の画像処理装置を用いて受精卵を識別することを特徴とする受精卵の製造方法。
【請求項8】
所定の環境条件で受精卵を培養し、
受精卵が存在する培養容器中において、観察視野内に位置する受精卵を含む複数の物体と前記複数の物体の像を結像する観察光学系との光学的距離を変化させながら撮像装置により前記複数の物体を撮影した複数の観察画像を取得し、
前記観察画像に写し込まれた前記複数の物体を抽出し、
前記観察画像に含まれる前記物体ごとに、受精卵の属性に応じた画像の特徴量を算出し、
前記複数の観察画像間における同一物体の画像の特徴量の変化に基づいて受精卵を認識することを特徴とする受精卵の製造方法。
【請求項9】
認識された受精卵を所定の選別基準に基づいて選別し、
選別された受精卵を前記培養容器中から採取して保存することを特徴とする請求項7又は8に記載の受精卵の製造方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図8】

【図9】
【図10】
【図11】
【図12】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図6】
【図7】
【公開番号】特開2012−39929(P2012−39929A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−183605(P2010−183605)
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月19日(2010.8.19)
【出願人】(000004112)株式会社ニコン (12,601)
【Fターム(参考)】
[ Back to top ]