
可動ステップ付きプラットホームドア装置
【課題】可動ステップ装置を備えるプラットホームドア装置で可動ステップの張り出しと格納の動作状態の正常または異常を高い精度で検知する。
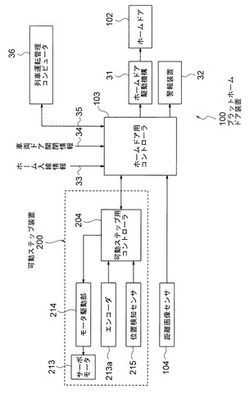
【解決手段】この可動ステップ付きプラットホームドア装置は、ホームドア102、第1コントローラ103、可動ステップ202、第2コントローラ204を備え、第1および第の2コントローラの制御に基づき車両ドア300aの開閉動作と可動ステップの張り出し・格納動作が制御され、さらにモータ等の状態検知センサ213a、可動ステップの位置検知センサ215、距離画像センサ104を備え、3つのセンサの出力信号に基づいて可動ステップの正常または異常を判断する。
【解決手段】この可動ステップ付きプラットホームドア装置は、ホームドア102、第1コントローラ103、可動ステップ202、第2コントローラ204を備え、第1および第の2コントローラの制御に基づき車両ドア300aの開閉動作と可動ステップの張り出し・格納動作が制御され、さらにモータ等の状態検知センサ213a、可動ステップの位置検知センサ215、距離画像センサ104を備え、3つのセンサの出力信号に基づいて可動ステップの正常または異常を判断する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は可動ステップ付きプラットホームドア装置に関し、特に、プラットホームと列車の車体との間に生じた隙間での乗降客の転落を防止するための可動ステップを備えたプラットホームドア装置に関する。
【背景技術】
【0002】
近年、鉄道列車の利用者(乗降客、旅客等)がプラットホームから転落したり列車に接触することを防止するため、プラットホームの軌道側縁部に沿って可動式のプラットホームドア装置(ホーム柵)が設けられている。プラットホームドア装置では、通常では閉じた状態のドア部(ホームドア)を、列車が所定位置に停止した時に車両ドアの開閉動作と連動して開き、利用者が乗降できるようにしている。プラットホームドア装置をプラットホームの軌道側縁部に沿って設けた場合、プラットホーム上に居る利用者は当該軌道側縁部の状態を見ることができない。特に、軌道側縁部が、軌道に沿って湾曲して曲線部分として形成されている場合には、当該曲線部分において列車とプラットホームとの間には比較的に大きな隙間が形成されることになる。このような隙間状態を利用者が事前に視認して確認できないとすると、安全性の観点で問題がある。このような場合に利用者を安全に乗降させるため、当該隙間部分には、プラットホームドア装置のドア部に開閉動作に連動する可動ステップ(ホームステップ)が設けられる。この可動ステップは、プラットホームドア装置における開閉ドア部に対応する下側領域で、プラットホームから張り出す機構を有している。ドア部が開くと可動ステップは張り出し、ドア部が閉じると格納される。このような可動ステップを備える可動ステップ装置(「ホームステップ装置」ともいう)は、通常、プラットホームドア装置の下部に組み込まれている。可動ステップの張り出しおよび格納の動作を制御するコントローラ(制御装置)は、プラットホームドア装置のコントローラボックスに収容されて構成されている。
【0003】
現在の可動ステップ装置における上記の可動ステップについては、列車が所定位置に停止していないにも拘わらず張り出したり、列車の車体限界を超えて張り出すと、可動ステップが列車の車体に接触・衝突するという問題が生じる。また乗降時に正常に張り出した可動ステップが乗降中に格納されると、乗降客がホーム下に転落するという問題も生じる。そこで現在の可動ステップ装置の構成では、可動ステップ装置において、可動ステップを張り出しおよび格納の動作を行わせるモータドライバの状態を検知する状態センサと、可動ステップの張り出し位置および格納位置を検知する位置センサとを設け、これらのセンサの検知信号を可動ステップ装置の専用の上記コントローラにより判断し、可動ステップの動作の異常検出を行っている。すなわち、上記の状態センサと位置センサに基づく二重の検知構造によって可動ステップの正常・異常を判断するようにしている。
【0004】
従来の可動ステップやプラットホームドア装置等を開示する公知文献として特許文献1〜4を挙げることができる。
【0005】
特許文献1は、可動ステップ装置でその制御装置に異常が生じた場合に当該制御装置の異常の有無を確実に検知するための構成を提案している。具体的には、可動ステップの動作を制御する制御装置において2組のCPUを備え、可動ステップ装置に各所要部に設けられた各種のセンサ等からの情報を2組のCPUの各々に入力させるようにしている。そして2組のCPUから出力される制御信号が一致するときには正常と判断して所要の通常の制御を行い、不一致であるときにはCPUの双方またはいずれか一方が異常であると判断し、安全側に固定した制御信号を駆動部に出力し、異常情報を総合制御装置に出力するようにしている。
【0006】
特許文献2のプラットホームドア開閉制御装置では、軌道側に張り出し可能な可動ステップを備えたプラットホームドア装置において、ドア部の開閉動作と可動ステップの張り出しと格納の各動作を連動させ、さらに、ドア部の開動作時間または閉動作時間よりも可動ステップの張り出し動作時間または格納動作時間を短く設定し、特に閉動作タイミングをドア部の閉動作タイミングより遅らせるように制御している。
【0007】
特許文献3では、車両用可動体(可動ステップを含む。)を駆動する装置において、当該可動体に何らかの異物が挟み込まれた場合に、当該挟み込み状態を高精度で検出して駆動制御を行う技術を開示している。異物の挟み込みの発生を判定する判定ステップでは、モータ駆動電流等の変化状態を移動平均値を通して監視し、当該可動体の可動範囲内での複数の可動位置のそれぞれに対して基準閾値等を設定し、基準閾値等との比較に基づいて異物の挟み込み異常を判定するようにしている。
【0008】
特許文献4に開示されたプラットホームドアの安全装置では、プラットホームドアの固定柵の軌道側の面に距離画像センサを装備し、この距離画像センサによってドア部の近傍のドア部から車両までの間の領域を撮像し、当該撮像領域において所定値以上の大きさの物体が存在するか否かに基づいて乗客等の安全性を監視するようにしている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第4353847号公報
【特許文献2】特開2003−81083号公報
【特許文献3】特許第4167621号公報(段落0002等)
【特許文献4】特開2011−093514号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
プラットホームドア装置に組み込まれた可動ステップ装置について、従来の可動ステップの動作異常を検出するための構成によれば、可動ステップ装置の専用のコントローラにおいて異常状態が発生して暴走が生じた場合には可動ステップの動作異常を検出することができなくなるという問題があった。可動ステップ装置のコントローラで異常が生じた場合に、この問題を解決する従来技術としては前述した特許文献1に開示された技術が存在する。これは、元々は1組であった可動ステップ装置用のCPUを2組設け、2組のCPUの出力する制御信号の一致、不一致で2組のCPUの双方またはいずれか一方が異常であることを判定している。
【0011】
しかしながら、専用のコントローラ(CPU(中央処理装置))を備えた上位のプラットホームドア装置に対して、同様に専用の他のコントローラ(CPU)を備えた可動ステップ装置を下位に組み込む構成では、可動ステップ装置にさらにCPUを追加することになり、部品コストが増大し、システム構成が複雑になる。
【0012】
また従来の異常判断の構成によれば、可動ステップの動作状態の正常・異常を、モータドライバの状態センサ、および可動ステップの位置センサの二重の検知構造によって判断するようにしていた、乗降客の安全性を一層高めるため、さらに検知の精度を高めることが望まれている。従来のプラットホームドア装置では、ドア部と列車の車体との間での乗降客の挟み込みの有無を監視するためにドア部の軌道側の所定領域を検知する距離画像センサを元々装備していた。そこで、プラットホームドア装置側に備えられていた距離画像センサを利用することにより、上記の検知の精度を向上させることが大いに望まれる。
【0013】
本発明の目的は、上記の課題に鑑み、可動ステップ装置が組み込まれたプラットホームドア装置において、プラットホーム装置に装備された距離画像センサを利用して可動ステップの張り出しと格納の動作状態の正常または異常をさらに高い精度で検知することができ、可動ステップの動作状態を三重化で監視し、さらに、これにより可動ステップ装置用のコントローラの正常または異常も判断することができ、極めて安全性を向上することができるようにした可動ステップ付きプラットホームドア装置を提供することにある。
さらに本発明の他の目的は、更なる発展系として、可動ステップの張り出しと格納の動作状態の監視をより一層多重化することにより、乗降客の安全性を高め、乗降客の転落を確実に防止することができる可動ステップ装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明に係る可動ステップ付きプラットホームドア装置は、上記の目的を達成するため、次のように構成される。
【0015】
第1の可動ステップ付きプラットホームドア装置(請求項1に対応)は、ドア部(ホームドア、ホームドア駆動機構等)と、このドア部の開閉動作を制御する第1コントローラ(ホームドア用コントローラ)と、可動ステップと、この可動ステップの張り出し・格納動作を制御する第2コントローラ(可動ステップ用コントローラ)とを備え、第1コントローラおよび第2コントローラの制御に基づき、プラットホームに停車した列車の車両ドアの開閉動作と連動して、ドア部の開閉動作と可動ステップの張り出し・格納動作とが行われる可動ステップ付きプラットホームドア装置であり、
さらに、可動ステップを移動させるモータおよびモータ駆動部の状態を検知する状態検知センサ(エンコーダ)と、可動ステップの移動位置を検知する位置検知センサと、可動ステップの張り出し・格納動作の状態を監視する距離画像センサと、を備え、状態監視センサと位置検知センサと距離画像センサの各々の出力信号のいずれかに基づいて可動ステップの動作状態の正常または異常を判断するようにしたことで特徴づけられる。
【0016】
上記の可動ステップ付きプラットホームドア装置では、可動ステップの動作状態の正常または異常を判断するに当たって、基本的な検知手段としてのモータ等の状態検知センサおよび可動ステップの位置検知センサに加えて、さらに距離画像センサを利用するように構成し、これによって状態検知センサまたは位置検知センサの検知情報を利用できなくなったとしても、距離画像センサの検知情報に基づいて可動ステップの動作状態の正常または異常を判断することが可能となる。
【0017】
第2の可動ステップ付きプラットホームドア装置(請求項2に対応)は、上記の構成において、好ましくは、状態検知センサと位置検知センサの各々の出力信号に基づく正常または異常の判断は第2コントローラで行われ、距離画像センサの出力信号に基づく正常または異常の判断は第1コントローラで行われることを特徴とする。
この構成によれば、第2コントローラの動作に異常が生じて状態検知センサまたは位置検知センサの検知情報を利用できなくなったとしても、第1コントローラにおいて距離画像センサの検知情報に基づいて可動ステップの動作状態の正常または異常を判断することが可能となる。
【0018】
第3の可動ステップ付きプラットホームドア装置(請求項3に対応)は、上記の構成において、好ましくは、第2コントローラから出力される判断結果に係る情報は前記第1コントローラに与えられることを特徴とする。
この構成によれば、第2コントローラが下位に位置するシステム構成において、状態検知センサおよび位置検知センサの検知情報を判断する第2コントローラで動作異常が生じ正しい判断情報が第1コントローラに提供されないとしても、第1コントローラは距離画像センサからの検知情報(優先順位を高くする)で可動ステップの動作状態の正常または異常を判断することが可能となる。さらに第1コントローラでは、第2コントローラの動作状態が異常か否かを判断することができる。
【0019】
第4の可動ステップ付きプラットホームドア装置(請求項4に対応)は、上記の構成において、好ましくは、第1コントローラは、第2コントローラによる前記正常または異常の判断結果と距離画像センサの出力信号との一致または不一致に基づき、最終的に距離画像センサの出力信号を優先して前記可動ステップの動作状態の正常または異常を判断することを特徴とする。
【0020】
第5の可動ステップ付きプラットホームドア装置(請求項5に対応)は、上記の構成において、好ましくは、上記の状態検知センサ、位置検知センサ、距離画像センサの各出力信号は第1コントローラに入力され、これらの出力信号に基づく正常または異常の判断は第1コントローラで行われることを特徴とする。
この構成によれば、可動ステップの動作状態の正常または異常を3つのセンサで検知し、3つのセンサのすべてが正常のときのみホームドアおよび可動ステップに関して通常的なシステム制御の動作が実行され、いずれか1つでも異常が検知されたときにはシステム制御の動作状態を安全性の方へ移行させるようにする。
【発明の効果】
【0021】
本発明によれば次の効果を奏する。
可動ステップ装置が組み込まれたプラットホームドア装置において、可動ステップ装置に備えられたモータ等の状態検知センサと可動ステップの位置検知センサに基づく可動ステップの動作状態の正常または異常を検知する構成に加えて、さらに、プラットホーム装置に装備された距離画像センサを利用して可動ステップの張り出しと格納の動作状態の正常または異常を検知するようにしたため、可動ステップの動作状態をさらに高い精度で検知することができ、可動ステップの動作状態を三重化で監視することができる。
また可動ステップ用コントローラがホームドア用コントローラに対して可動ステップの動作状態の判断情報を提供するようにされたシステム構成の場合には、上記の距離画像センサを付加した構成によって、可動ステップ用コントローラの正常または異常も判断することができ、極めて安全性を向上することができる。
さらに1つのコントローラにおいて、上記の状態検知センサ、位置検知センサ、距離画像センサの検知情報を入力し、3つのセンサの検知情報を比較・照合するようにした構成によれば、可動ステップの張り出しと格納の動作状態の監視をより一層多重化したため、乗降客の安全性を高め、乗降客の転落を確実に防止することができる。
【図面の簡単な説明】
【0022】
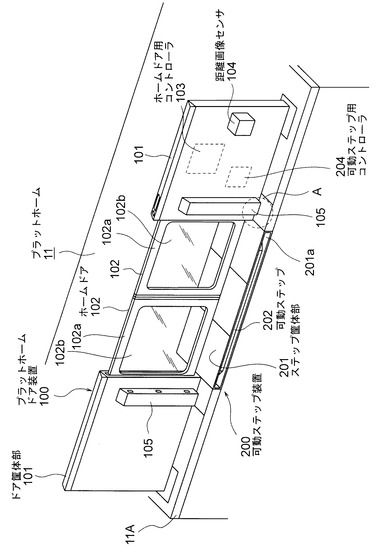
【図1】本発明の第1の実施形態に係る可動ステップ付きプラットホームドア装置の軌道(線路)側から見た外観斜視図である。
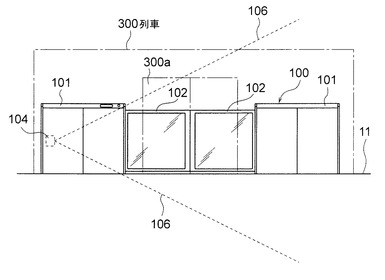
【図2】第1の実施形態に係る可動ステップ付きプラットホームドア装置のホーム側から見た正面図である。
【図3】第1の実施形態に係る可動ステップ付きプラットホームドア装置の平面図である。
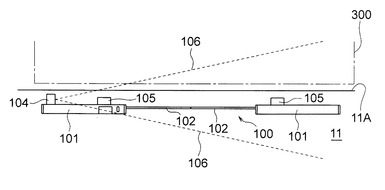
【図4】第1の実施形態に係る可動ステップ付きプラットホームドア装置の側面図である。
【図5】第1の実施形態に係る可動ステップ装置の内部構造を示す斜視図である。
【図6】図1中の領域Aの部分を軌道側の正面から見て拡大して示し、ケーブルルートを説明するための要部の拡大部分断面図である。
【図7】本発明の第1の実施形態における検知系および電気制御系のシステム構成を示すブロック図である。
【図8】第1の実施形態に係る可動ステップ付きプラットホームドア装置の動作例を示すフローチャートである。
【図9】本発明の第2の実施形態における検知系および電気制御系のシステム構成を示すブロック図である。
【発明を実施するための形態】
【0023】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
【0024】
図1〜図8を参照して本発明に係る可動ステップ付きプラットホームドア装置の第1の実施形態を説明する。この第1の実施形態の構成によれば、可動ステップ装置がプラットホームドア装置に付設された構造を有しており、さらに可動ステップの張り出しおよび格納の動作がホームドアの開閉動作に連動するようになっている。なお図1等では、説明の便宜上、プラットホームの左右の両側を切断し、省略して示している。
【0025】
図1等において、100はプラットホームドア装置の部分であり、200は可動ステップ装置の部分である。プラットホームドア装置100は、全体として柵状の形態を有し、プラットホーム11の軌道(線路)側の縁部11Aに沿って乗客を防護するための壁部として設置されている。プラットホームドア装置100は固定柵と可動柵から成っている。すなわちプラットホームドア装置100は、プラットホーム11の床面に固定された左右一対のドア筐体部101(固定柵)と、各ドア筐体部101内の戸袋構造によって端面のスリット状開口部を通して出し入れ(開閉)自在に設けられた左右一対のホームドア102(可動柵)とから構成されている。さらにプラットホームドア装置100は、ホームドア駆動機構(図1中、図示せず)と、ホームドア用コントローラ103とを備えている。ホームドア駆動機構とホームドア用コントローラ103はドア筐体部101内に設けられている。ホームドア用コントローラ103はマイコン(CPU等)によって作られた制御装置(または制御盤)である。また左右一対のドア筐体部101の間には乗降通路となる開口領域が形成されている。この乗降通路を、左右一対のホームドア102によって開閉する。ホームドア102は、所要の強度を有するドアフレーム部材102aで作られ、この実施形態では透明な強化ガラス102bが嵌め込まれている。利用者は、ホームドア102の透明部(強化ガラス102b)を通して、プラットホーム11の側から軌道側の状態を見ることができる。またホームドア102の開閉動作は、プラットホーム11に停車した列車300(図2〜4に示す)の車両ドア300aの開閉動作と連動している。すなわち、列車300が停車して車両ドア300aが開くとホームドア102が開き、その後車両ドア300aが閉じる時に併せてホームドア102が閉じるように動作する。なお図1〜図3等では一組のプラットホームドア装置100が図示されているが、列車300の複数の車両ドア300aの各々に対応してプラットホームドア装置100は配置されている。
【0026】
可動ステップ装置200は、上記の乗降通路を形成するホーム11の床面に埋設されるように設置されている。可動ステップ装置200は、フラットな形状を有したステップ筐体部201と、ステップ筐体部201の内部にて出し入れ(張り出し・格納)自在に設けられた可動ステップ202と、可動ステップ駆動部203(図5に示す)と、可動ステップ用コントローラ204とから構成されている。可動ステップ駆動部203はステップ筐体部201内に設けられている。可動ステップ用コントローラ204は上記のドア筐体部101内に設けられる。可動ステップ用コントローラ204は、マイコン(CPU等)によって作られた制御装置(または制御盤)である。可動ステップ装置200のステップ筐体部201は、プラットホーム11における乗降通路に対応する領域の縁部に沿って埋設されており、ステップ筐体部201の天板部は乗降通路のホーム床面となっている。また可動ステップ202の張り出し・格納動作はホームドア102の開閉動作に連動している。すなわち、列車300が停止してホームドア102が開くときその開く直前に可動ステップ202が前進して張り出し、他方、ホームドア102が閉まるときその後に可動ステップ202が後退して格納される。さらに詳しくは、可動ステップ202の張り出し動作が完了したことを各種のセンサ(エンコーダ、位置検知センサ等)で確認してホームドア102は開くことになり、他方、ホームドア102の閉じる動作が完了したことを当該センサで確認して可動ステップ202は格納されることになる。
【0027】
次にプラットホームドア装置100の構成についてさらに詳述する。
ドア筐体部101に内蔵されたホームドア102を開閉動作させるホームドア駆動機構は、ホームドア102をプラットホーム11の縁部11Aに対して並行に移動させるためのレールと、ホームドア102を移動させるモータ、モータ駆動部、および動力伝達機構とから構成される。モータ駆動部の動作は、ホームドア用コントローラ103によって制御される。またホームドア用コントローラ103は、上位の列車運転管理コンピュータ(図1中、図示せず)に回線を介して接続されており、各番線に入線し停車する列車に関する情報は事前に当該列車運転管理コンピュータから与えられる。
【0028】
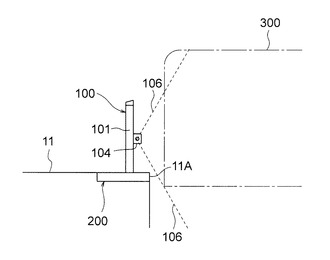
またプラットホームドア装置100では、前述した乗降通路を通して乗客が乗降するとき、その後の列車が発車する段階で、ホームドア102と車両ドアとの間の空間で乗客等が挟まれる等の異常事態の発生を検知するための距離画像センサが設けられている。距離画像センサ104は、例えば、半導体チップの微細構造を利用して作られ、ミラー構造を利用してレーザビームを三次元空間にて走査させることにより設定された検知領域内の存在物を検知する機能を有している。距離画像センサは小型のデバイスであり、図1等ではセンサボックス104の中に設けられている。以下では、説明の便宜上、センサボックス104を「距離画像センサ104」と記す。この距離画像センサ104の設置場所は、図1〜図4に示すように、ドア筐体部101の背面(軌道側の面)であって、例えば図1等において軌道側から見て右側のドア筐体部101の軌道側の面の端部の中間的な高さ位置である。なおドア筐体部101の背面において乗降通路の両側には支柱105が設けられている。
【0029】
距離画像センサ104の検知面は乗降通路の方向に向けられている。図2〜図4において任意の角度で扇形に開いた2本の破線の間として示された領域106は距離画像センサ104の検知領域(撮像領域)を示している。2本の破線の間の領域106で光線の走査が行われる。検知領域106によれば、乗降通路を中心領域として、プラットホーム側および軌道側の間、上方側および下方側の間で所定の領域が設定され、3次元的な検知領域が設定されている。図2〜図4の各々で示された検知領域106の範囲は、距離画像センサ104の検知面を、直交する3軸の座標方向にて走査型で動作させることにより3次元検知領域として設定される。距離画像センサ104による検知領域106では、プラットホーム11の下側領域も検知できるので、乗客の転落等の異常事態も検知することが可能である。さらに図2に示すように、乗降通路において、プラットホーム11の床面の下側の可動ステップ装置200の可動ステップ202が張り出す領域も、距離画像センサ104による検知領域106に含まれる。従って、距離画像センサ104によれば、可動ステップ装置200における可動ステップ202の張り出し状態または格納状態を高い精度で検知することができる。なお図2等で図示された検知領域106は一例であって、可動ステップ装置200の可動ステップ202が張り出す領域が含まれていればよく、図示されたものに限定されるものではない。
【0030】
次いで可動ステップ装置200の構成についてさらに詳述する。
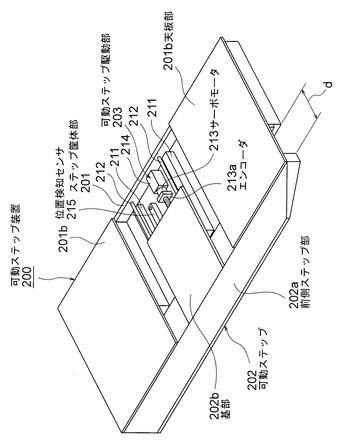
可動ステップ装置200では、図1および図5等に示されるように、ステップ筐体部201においてプラットホーム11の床面近傍の軌道側の面に開口部201aが形成されている。この開口部201aを介して可動ステップ202が張り出され、または格納される。ステップ筐体部201の天板部201bは床面を形成し、乗客の足場になる。天板部201bは本実施形態では例えば3枚備えられている。図5では中央の天板部を取り外して、内部の構造を示している。また図1では可動ステップ202が後退しステップ筐体部201内に格納した状態を示し、図5では可動ステップ202が前進しステップ筐体部201から張り出した状態を示している。図5に示された可動ステップ202の張り出し状態において張り出しの距離(d)は例えば200mmである。可動ステップ装置200の内部には左右の両側部に支持台211が設けられており、それらの間の空間に2本のレール212が設置されている。可動ステップ202は、前側ステップ部202aと、レール212上を移動する基部202bとから構成されている。前側ステップ部202aと基部202bとは一体的に形成される。基部202bがレール212上をレールに係合した状態にて移動することにより、前側ステップ部202aがステップ筐体部201の開口部201aから出し入れされる。こうして可動ステップ202は張り出し動作または格納動作を行う。可動ステップ202の基部202bの下面にはボールネジ機構が設けられ、ボールネジ機構を介してリニアのレール212に連結されており、このボールネジ機構の回転軸をサーボモータ213で回転させる。214はサーボモータ213のモータ駆動部である。サーボモータ213にはエンコーダ213aが状態検知センサとして付加されている。このエンコーダ213aの検知信号に基づいてサーボモータ213およびモータ駆動部214の状態が検知される。さらに、可動ステップ202の移動位置を検知する位置検知センサ215が付設されている。位置検知センサ215は例えば光学的な反射型センサであり、可動ステップ202の任意の場所を検出することにより、可動ステップ202が前進位置(張り出し位置)にあるか否かまたは後退位置(格納位置)にあるか否かを検知する機能を有している。この位置検知センサ215によって可動ステップ202の移動位置が検知され、その動きが検知される。
【0031】
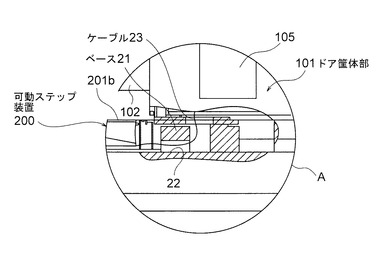
なお、図1中の領域Aを拡大部分断面で示した図6に示されるように、可動ステップ装置200内の検知系および電気制御系との間での給電および信号送受の構成については、プラットホームドア装置100を支持するベース21に設けられた孔22を通して配線されたケーブル23によって、ドア筐体部101内に設けられた電気制御系とつながっている。本実施形態に係る可動ステップ付きプラットホームドア装置では、前述した通り、可動ステップ用コントローラ204はドア筐体部101内に配置されている。可動ステップ装置200のステップ筐体部201内に設けられたモータ駆動部214に対する可動ステップ用コントローラ204からの動作制御信号(電源電力)の供給、エンコーダ213aおよび位置検知センサ215からの各検知信号の可動ステップ用コントローラ204への伝送は、ケーブル23を経由して行われる。
【0032】
図7に示したシステム構成図と図8に示したフローチャートに基づいて、本実施形態に係る可動ステップ付きプラットホームドア装置の要部の構成と動作例を説明する。
可動ステップ付きプラットホームドア装置は、システム的に、プラットホームドア装置100の構成部と可動ステップ装置200の構成部とから成っている。
【0033】
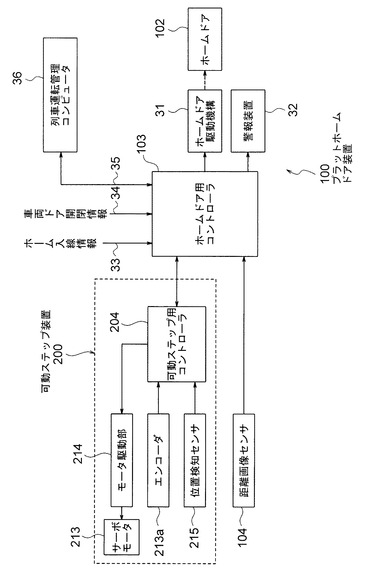
プラットホームドア装置100の構成部は、中央部分にはホームドア用コントローラ103が位置し、その入力側に距離画像センサ104が配置され、その出力側にホームドア駆動機構31と警報装置32が配置される。警報装置32は、例えば警告灯や警報音発生器である。ホームドア駆動機構31は、ホームドア102を開閉動作させる。またホームドア用コントローラ103には、外部より、ホーム入線情報33と入線した車両の車両ドアの開閉情報34とが入力される。またホームドア用コントローラ103は通信回線35を介して上位の列車運転管理コンピュータ36に接続されている。ホームドア用コントローラ103は、ホーム入線情報33と入線した車両の車両ドアの開閉情報34を取得して、ホームドア駆動機構31の動作を制御し、車両ドアの開閉動作に連動させてホームドア102を開閉する。そしてホームドア102の開閉動作の制御の際において、距離画像センサ104によって検知領域106内の状態を検知し、距離画像センサ104から異常情報が与えられない場合にはホームドア102を開閉制御し、異常情報が与えられる場合にはホームドア102の開閉動作の制御を停止して警報装置32を駆動する。
【0034】
可動ステップ装置200の構成部はプラットホームドア装置100の構成部に対して下位的な位置に設けられる。可動ステップ装置200の構成部は、可動ステップ用コントローラ204と、サーボモータ213およびモータ駆動部214と、エンコーダ(状態検知センサ)213aと、位置検知センサ215とから成っている。可動ステップ用コントローラ204は、上位のホームドア用コントローラ103からの動作指令を受けてモータ駆動部214およびサーボモータ213の各動作を制御し、可動ステップ202の張り出し動作および格納動作を制御する。すなわち、ホームドア102が開くときその前に可動ステップ202を張り出すように動作指令を受け、ホームドア102が閉じるときその後に可動ステップ202を格納するように動作指令を受ける。可動ステップ202の張り出しと格納の各動作が正常に行われているか否かについては、先ず第1に、可動ステップ用コントローラ204が、エンコーダ213aと位置検知センサ215の各検知信号に基づいて判断する。すなわち、可動ステップ用コントローラ204は、エンコーダ213aからの検知信号または位置検知センサ215からの検知信号によって張り出しまたは格納の完了を知らせる信号を受信しないときには、可動ステップ202の状態が異常であると判断して、上位のホームドア用コントローラ103に通知する。ホームドア用コントローラ103は、可動ステップ用コントローラ204からの異常通知を受けると、さらに上位の列車運転管理コンピュータ36に通知すると共に、ホームドア102の開閉動作の制御を停止し、かつ警報装置32を駆動する。従って、ホームドア用コントローラ103は、可動ステップ202の動作の異常状態を、エンコーダ(状態検知センサ)213aからの検知信号(第1の検知ルート)、または位置検知センサ215からの検知信号(第2の検知ルート)により、可動ステップ用コントローラ204の判断を通して監視することになる。
【0035】
但し、この場合に、可動ステップ用コントローラ204の動作それ自体に異常に生じたときには、可動ステップ202の動作の異常状態を監視することが不可能になる。このような場合には、距離画像センサ104の検知領域106によって可動ステップ202の張り出し・格納動作の異常または正常を判断することができるので、距離画像センサ104の検知信号(第3の検知ルート)に基づいてホームドア用コントローラ103は可動ステップ202の動作状態を監視することができる。この場合、距離画像センサ104の検知信号は、可動ステップ202の動作状態の判断基準としては優先順位が高く設定されている。すなわち、例えば、ホームドア用コントローラ103は、可動ステップ用コントローラ204から異常通知を受け取らない状態で、距離画像センサ104によってホームに車両が停車している時以外に可動ステップ202が張り出している状態を検知したときには、プラットホームドア装置100の動作を停止させ、警報装置32を作動させる。また例えば、ホームドア用コントローラ103が可動ステップ用コントローラ204から異常通知を受け取らない状態で、距離画像センサ104によってホームに車両が停車している時に可動ステップ202が格納されている状態を検知したときにも、同様である。
【0036】
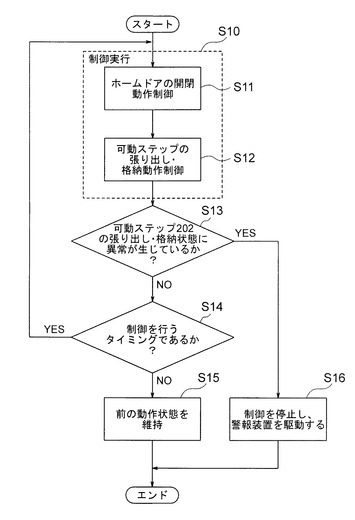
図8に示した可動ステップ202の異常動作の検知に係る処理の流れを説明する。この処理はホームドア用コントローラ103で実行される。ホームドア用コントローラ103は、基本的に全体として、必要なタイミングで、プラットホームドア装置100と可動ステップ装置200の各動作の制御を実行する(処理ステップS10)。この制御の処理ステップS10は、ホームに入線し車両ドアを開閉する列車の動作に連動させて行われるホームドア102の開閉動作制御(処理ステップS11)および可動ステップ202の張り出し・格納動作制御(処理ステップS12)とから成っている。張り出し・格納動作制御(処理ステップS12)は可動ステップ用コントローラ204を経由して行われる。ホームドア102の開閉動作と可動ステップ202の張り出し・格納動作は所定の順序関係に基づいて連動している。さらに、その際には、可動ステップ202の張り出し・格納動作に異常が生じているか否かが判断される(判断ステップS13)。判断ステップS13で異常が生じていない(NO)ときには、次の判断ステップS14で制御を行うタイミングであるかを判断し、制御を行うタイミングであると判断された場合(YES)には、処理ステップS10に戻り、適切なタイミングでホームドア102の開閉動作制御(処理ステップS11)と可動ステップ202の張り出し・格納動作制御(処理ステップS12)を実行する。判断ステップS14で制御を行うタイミングでない(NO)と判断された場合には、その前の動作状態を維持し継続する(処理ステップS15)。
【0037】
次に、上記の判断ステップS13で異常が生じている(YES)ときには、すべての制御を停止して警報装置32を駆動する(処理ステップS16)。これにより、危険な状態が回避され、警報が発せられる。
【0038】
上記の判断ステップS13では、より詳しくは、前述した通り、エンコーダ213aの検知信号もしくは位置検知センサ215の検知信号に基づく可動ステップ用コントローラ204の異常通知(第1および第2の検知ルート)、または、距離画像センサ104の可動ステップ202に関する張り出し・格納状態の検知信号(第3の検知ルート)に基づいて、可動ステップ202の張り出し・格納動作について異常が生じているか否かが判断される。
【0039】
上記の通り、本実施形態に係る可動ステップ付きプラットホームドア装置よれば、可動ステップ装置100側に元々装備されていたエンコーダ213aの検知信号または位置検知センサ215の検知信号に基づいて可動ステップ202の動作の正常または異常を監視すると共に、さらに、プラットホームドア装置100側に元々装備されていた距離画像センサ104の検知領域を変更して可動ステップ202の張り出し・格納状態を検知することでその動作の正常または異常を監視することができ、これにより可動ステップ202の監視を三重化することができる。この場合には、可動ステップ装置200の可動ステップ用コントローラ204の機能に異常が生じたときにも距離画像センサ104により確実に当該異常を検知することができる。
【0040】
なお、上記の実施形態の可動ステップ202の正常・異常動作の検知構成では、2つのコントローラ103,204の間に主従関係があり、かつ第1および第2の検知ルートと第3の検知ルートに関して優先順位をつけて検知を行うようにした。しかしながら、本発明の構成はこの検知構成に限定されない。例えば、ホームドア用コントローラ103において、前述の第1から第3の検知ルートで得られる検知信号を比較・照合し、それらの間の一致または不一致を判断し、少なくともいずれか1つの検知信号が異常を示す場合には制御を停止して警報を発するように構成することもできる。
さらに、ホームドア用コントローラ103において、可動ステップ用コントローラ204による可動ステップ202の動作状態に関する正常または異常の判断結果と、距離画像センサ104が出力する検知信号との一致または不一致を判断し、これに基づき最終的に距離画像センサ104の検知信号を優先して可動ステップ202の動作状態の正常または異常を判断するように構成することもできる。
【0041】
次に、図9を参照して本発明に係る可動ステップ付きプラットホームドア装置の第2の実施形態を説明する。図9は、先に説明した図7に対応する図であり、第2の実施形態の検知系および電気制御系のシステム構成を示している。
【0042】
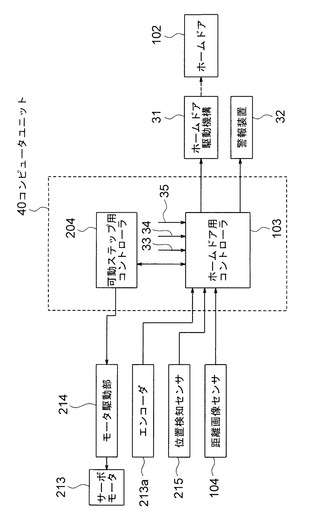
このシステム構成では、ホームドア用コントローラ103と可動ステップ用コントローラ204が1つのコンピュータユニット40の中に配置されている。可動ステップ用コントローラ204はホームドア用コントローラ103からの指令を受け、可動ステップ装置200側のモータ駆動部215の動作を制御して可動ステップ202を張り出し・格納動作させる。
他方、可動ステップ装置200側のエンコーダ213aおよび位置検知センサ215から出力される各検知信号はホームドア用コントローラ103に直接に入力されている。またプラットホームドア装置100側の距離画像センサ104からの検知信号もホームドア用コントローラ103に入力されている。
上記の構成によれば、ホームドア用コントローラ103は、エンコーダ213aおよび位置検知センサ215からの各検知信号、距離画像センサ104からの検知信号の一致または不一致を比較・照合し、3つの検知信号が正常で一致しているときにはホームドアの開閉動作および可動ステップの張り出し・格納動作について通常の制御を行い、他方、これらの検知信号の少なくともいずれか1つに異常を検知する信号が含まれるときには、可動ステップ付きプラットホームドア装置の全動作に係る制御を停止し、警報装置32により警報を発する。
【0043】
なお上記の実施形態の説明では、可動ステップを装備したプラットホームドア装置としての装置構成を説明したが、可動ステップ装置が単独の個別な製品機械であって、当該可動ステップ装置を、既存のプラットホームドア装置に組み付けて付設するように構成する場合にも、距離画像センサを利用して同様な三重の検知ルートから成る検知系を構成することが可能である。
【0044】
以上の実施形態で説明された構成、形状、大きさ、および配置関係については本発明が理解・実施できる程度に概略的に示したものにすぎず、また数値等については例示にすぎない。従って本発明は、説明された実施形態に限定されるものではなく、特許請求の範囲に示される技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【産業上の利用可能性】
【0045】
本発明に係る可動ステップ付きプラットホームドア装置は、ホームドアの開閉動作と可動ステップの張り出し・格納動作とが連動するように構成された装置において、ホームと列車の間の隙間を埋める可動ステップの張り出し動作等の異常を、エンコーダおよび位置検知センサからの各検知信号に加えて、距離画像センサからの検知信号をも利用して監視するようにし、これにより可動ステップ用コントローラで動作異常が発生したときであっても確実に可動ステップの動作の正常または異常を監視することに利用される。
【符号の説明】
【0046】
11 プラットホーム
11A 縁部
21 ベース
22 孔
23 ケーブル
31 ホームドア駆動機構
32 警報装置
33 ホーム入線情報
34 車両ドア開閉情報
36 列車運転管理コンピュータ
100 プラットホームドア装置
101 ドア筐体部
102 ホームドア
103 ホームドア用コントローラ
104 距離画像センサ
105 支柱
106 検知領域
200 可動ステップ装置
201 ステップ筐体部
201a 開口部
201b 天板部
202 可動ステップ
202a 前側ステップ部
202b 基板
204 可動ステップ用コントローラ
211 支持台
212 レール
213 サーボモータ
213a エンコーダ
214 モータ駆動部
215 位置検知センサ
300 列車
300a 車両ドア
【技術分野】
【0001】
本発明は可動ステップ付きプラットホームドア装置に関し、特に、プラットホームと列車の車体との間に生じた隙間での乗降客の転落を防止するための可動ステップを備えたプラットホームドア装置に関する。
【背景技術】
【0002】
近年、鉄道列車の利用者(乗降客、旅客等)がプラットホームから転落したり列車に接触することを防止するため、プラットホームの軌道側縁部に沿って可動式のプラットホームドア装置(ホーム柵)が設けられている。プラットホームドア装置では、通常では閉じた状態のドア部(ホームドア)を、列車が所定位置に停止した時に車両ドアの開閉動作と連動して開き、利用者が乗降できるようにしている。プラットホームドア装置をプラットホームの軌道側縁部に沿って設けた場合、プラットホーム上に居る利用者は当該軌道側縁部の状態を見ることができない。特に、軌道側縁部が、軌道に沿って湾曲して曲線部分として形成されている場合には、当該曲線部分において列車とプラットホームとの間には比較的に大きな隙間が形成されることになる。このような隙間状態を利用者が事前に視認して確認できないとすると、安全性の観点で問題がある。このような場合に利用者を安全に乗降させるため、当該隙間部分には、プラットホームドア装置のドア部に開閉動作に連動する可動ステップ(ホームステップ)が設けられる。この可動ステップは、プラットホームドア装置における開閉ドア部に対応する下側領域で、プラットホームから張り出す機構を有している。ドア部が開くと可動ステップは張り出し、ドア部が閉じると格納される。このような可動ステップを備える可動ステップ装置(「ホームステップ装置」ともいう)は、通常、プラットホームドア装置の下部に組み込まれている。可動ステップの張り出しおよび格納の動作を制御するコントローラ(制御装置)は、プラットホームドア装置のコントローラボックスに収容されて構成されている。
【0003】
現在の可動ステップ装置における上記の可動ステップについては、列車が所定位置に停止していないにも拘わらず張り出したり、列車の車体限界を超えて張り出すと、可動ステップが列車の車体に接触・衝突するという問題が生じる。また乗降時に正常に張り出した可動ステップが乗降中に格納されると、乗降客がホーム下に転落するという問題も生じる。そこで現在の可動ステップ装置の構成では、可動ステップ装置において、可動ステップを張り出しおよび格納の動作を行わせるモータドライバの状態を検知する状態センサと、可動ステップの張り出し位置および格納位置を検知する位置センサとを設け、これらのセンサの検知信号を可動ステップ装置の専用の上記コントローラにより判断し、可動ステップの動作の異常検出を行っている。すなわち、上記の状態センサと位置センサに基づく二重の検知構造によって可動ステップの正常・異常を判断するようにしている。
【0004】
従来の可動ステップやプラットホームドア装置等を開示する公知文献として特許文献1〜4を挙げることができる。
【0005】
特許文献1は、可動ステップ装置でその制御装置に異常が生じた場合に当該制御装置の異常の有無を確実に検知するための構成を提案している。具体的には、可動ステップの動作を制御する制御装置において2組のCPUを備え、可動ステップ装置に各所要部に設けられた各種のセンサ等からの情報を2組のCPUの各々に入力させるようにしている。そして2組のCPUから出力される制御信号が一致するときには正常と判断して所要の通常の制御を行い、不一致であるときにはCPUの双方またはいずれか一方が異常であると判断し、安全側に固定した制御信号を駆動部に出力し、異常情報を総合制御装置に出力するようにしている。
【0006】
特許文献2のプラットホームドア開閉制御装置では、軌道側に張り出し可能な可動ステップを備えたプラットホームドア装置において、ドア部の開閉動作と可動ステップの張り出しと格納の各動作を連動させ、さらに、ドア部の開動作時間または閉動作時間よりも可動ステップの張り出し動作時間または格納動作時間を短く設定し、特に閉動作タイミングをドア部の閉動作タイミングより遅らせるように制御している。
【0007】
特許文献3では、車両用可動体(可動ステップを含む。)を駆動する装置において、当該可動体に何らかの異物が挟み込まれた場合に、当該挟み込み状態を高精度で検出して駆動制御を行う技術を開示している。異物の挟み込みの発生を判定する判定ステップでは、モータ駆動電流等の変化状態を移動平均値を通して監視し、当該可動体の可動範囲内での複数の可動位置のそれぞれに対して基準閾値等を設定し、基準閾値等との比較に基づいて異物の挟み込み異常を判定するようにしている。
【0008】
特許文献4に開示されたプラットホームドアの安全装置では、プラットホームドアの固定柵の軌道側の面に距離画像センサを装備し、この距離画像センサによってドア部の近傍のドア部から車両までの間の領域を撮像し、当該撮像領域において所定値以上の大きさの物体が存在するか否かに基づいて乗客等の安全性を監視するようにしている。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特許第4353847号公報
【特許文献2】特開2003−81083号公報
【特許文献3】特許第4167621号公報(段落0002等)
【特許文献4】特開2011−093514号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
プラットホームドア装置に組み込まれた可動ステップ装置について、従来の可動ステップの動作異常を検出するための構成によれば、可動ステップ装置の専用のコントローラにおいて異常状態が発生して暴走が生じた場合には可動ステップの動作異常を検出することができなくなるという問題があった。可動ステップ装置のコントローラで異常が生じた場合に、この問題を解決する従来技術としては前述した特許文献1に開示された技術が存在する。これは、元々は1組であった可動ステップ装置用のCPUを2組設け、2組のCPUの出力する制御信号の一致、不一致で2組のCPUの双方またはいずれか一方が異常であることを判定している。
【0011】
しかしながら、専用のコントローラ(CPU(中央処理装置))を備えた上位のプラットホームドア装置に対して、同様に専用の他のコントローラ(CPU)を備えた可動ステップ装置を下位に組み込む構成では、可動ステップ装置にさらにCPUを追加することになり、部品コストが増大し、システム構成が複雑になる。
【0012】
また従来の異常判断の構成によれば、可動ステップの動作状態の正常・異常を、モータドライバの状態センサ、および可動ステップの位置センサの二重の検知構造によって判断するようにしていた、乗降客の安全性を一層高めるため、さらに検知の精度を高めることが望まれている。従来のプラットホームドア装置では、ドア部と列車の車体との間での乗降客の挟み込みの有無を監視するためにドア部の軌道側の所定領域を検知する距離画像センサを元々装備していた。そこで、プラットホームドア装置側に備えられていた距離画像センサを利用することにより、上記の検知の精度を向上させることが大いに望まれる。
【0013】
本発明の目的は、上記の課題に鑑み、可動ステップ装置が組み込まれたプラットホームドア装置において、プラットホーム装置に装備された距離画像センサを利用して可動ステップの張り出しと格納の動作状態の正常または異常をさらに高い精度で検知することができ、可動ステップの動作状態を三重化で監視し、さらに、これにより可動ステップ装置用のコントローラの正常または異常も判断することができ、極めて安全性を向上することができるようにした可動ステップ付きプラットホームドア装置を提供することにある。
さらに本発明の他の目的は、更なる発展系として、可動ステップの張り出しと格納の動作状態の監視をより一層多重化することにより、乗降客の安全性を高め、乗降客の転落を確実に防止することができる可動ステップ装置を提供することにある。
【課題を解決するための手段】
【0014】
本発明に係る可動ステップ付きプラットホームドア装置は、上記の目的を達成するため、次のように構成される。
【0015】
第1の可動ステップ付きプラットホームドア装置(請求項1に対応)は、ドア部(ホームドア、ホームドア駆動機構等)と、このドア部の開閉動作を制御する第1コントローラ(ホームドア用コントローラ)と、可動ステップと、この可動ステップの張り出し・格納動作を制御する第2コントローラ(可動ステップ用コントローラ)とを備え、第1コントローラおよび第2コントローラの制御に基づき、プラットホームに停車した列車の車両ドアの開閉動作と連動して、ドア部の開閉動作と可動ステップの張り出し・格納動作とが行われる可動ステップ付きプラットホームドア装置であり、
さらに、可動ステップを移動させるモータおよびモータ駆動部の状態を検知する状態検知センサ(エンコーダ)と、可動ステップの移動位置を検知する位置検知センサと、可動ステップの張り出し・格納動作の状態を監視する距離画像センサと、を備え、状態監視センサと位置検知センサと距離画像センサの各々の出力信号のいずれかに基づいて可動ステップの動作状態の正常または異常を判断するようにしたことで特徴づけられる。
【0016】
上記の可動ステップ付きプラットホームドア装置では、可動ステップの動作状態の正常または異常を判断するに当たって、基本的な検知手段としてのモータ等の状態検知センサおよび可動ステップの位置検知センサに加えて、さらに距離画像センサを利用するように構成し、これによって状態検知センサまたは位置検知センサの検知情報を利用できなくなったとしても、距離画像センサの検知情報に基づいて可動ステップの動作状態の正常または異常を判断することが可能となる。
【0017】
第2の可動ステップ付きプラットホームドア装置(請求項2に対応)は、上記の構成において、好ましくは、状態検知センサと位置検知センサの各々の出力信号に基づく正常または異常の判断は第2コントローラで行われ、距離画像センサの出力信号に基づく正常または異常の判断は第1コントローラで行われることを特徴とする。
この構成によれば、第2コントローラの動作に異常が生じて状態検知センサまたは位置検知センサの検知情報を利用できなくなったとしても、第1コントローラにおいて距離画像センサの検知情報に基づいて可動ステップの動作状態の正常または異常を判断することが可能となる。
【0018】
第3の可動ステップ付きプラットホームドア装置(請求項3に対応)は、上記の構成において、好ましくは、第2コントローラから出力される判断結果に係る情報は前記第1コントローラに与えられることを特徴とする。
この構成によれば、第2コントローラが下位に位置するシステム構成において、状態検知センサおよび位置検知センサの検知情報を判断する第2コントローラで動作異常が生じ正しい判断情報が第1コントローラに提供されないとしても、第1コントローラは距離画像センサからの検知情報(優先順位を高くする)で可動ステップの動作状態の正常または異常を判断することが可能となる。さらに第1コントローラでは、第2コントローラの動作状態が異常か否かを判断することができる。
【0019】
第4の可動ステップ付きプラットホームドア装置(請求項4に対応)は、上記の構成において、好ましくは、第1コントローラは、第2コントローラによる前記正常または異常の判断結果と距離画像センサの出力信号との一致または不一致に基づき、最終的に距離画像センサの出力信号を優先して前記可動ステップの動作状態の正常または異常を判断することを特徴とする。
【0020】
第5の可動ステップ付きプラットホームドア装置(請求項5に対応)は、上記の構成において、好ましくは、上記の状態検知センサ、位置検知センサ、距離画像センサの各出力信号は第1コントローラに入力され、これらの出力信号に基づく正常または異常の判断は第1コントローラで行われることを特徴とする。
この構成によれば、可動ステップの動作状態の正常または異常を3つのセンサで検知し、3つのセンサのすべてが正常のときのみホームドアおよび可動ステップに関して通常的なシステム制御の動作が実行され、いずれか1つでも異常が検知されたときにはシステム制御の動作状態を安全性の方へ移行させるようにする。
【発明の効果】
【0021】
本発明によれば次の効果を奏する。
可動ステップ装置が組み込まれたプラットホームドア装置において、可動ステップ装置に備えられたモータ等の状態検知センサと可動ステップの位置検知センサに基づく可動ステップの動作状態の正常または異常を検知する構成に加えて、さらに、プラットホーム装置に装備された距離画像センサを利用して可動ステップの張り出しと格納の動作状態の正常または異常を検知するようにしたため、可動ステップの動作状態をさらに高い精度で検知することができ、可動ステップの動作状態を三重化で監視することができる。
また可動ステップ用コントローラがホームドア用コントローラに対して可動ステップの動作状態の判断情報を提供するようにされたシステム構成の場合には、上記の距離画像センサを付加した構成によって、可動ステップ用コントローラの正常または異常も判断することができ、極めて安全性を向上することができる。
さらに1つのコントローラにおいて、上記の状態検知センサ、位置検知センサ、距離画像センサの検知情報を入力し、3つのセンサの検知情報を比較・照合するようにした構成によれば、可動ステップの張り出しと格納の動作状態の監視をより一層多重化したため、乗降客の安全性を高め、乗降客の転落を確実に防止することができる。
【図面の簡単な説明】
【0022】
【図1】本発明の第1の実施形態に係る可動ステップ付きプラットホームドア装置の軌道(線路)側から見た外観斜視図である。
【図2】第1の実施形態に係る可動ステップ付きプラットホームドア装置のホーム側から見た正面図である。
【図3】第1の実施形態に係る可動ステップ付きプラットホームドア装置の平面図である。
【図4】第1の実施形態に係る可動ステップ付きプラットホームドア装置の側面図である。
【図5】第1の実施形態に係る可動ステップ装置の内部構造を示す斜視図である。
【図6】図1中の領域Aの部分を軌道側の正面から見て拡大して示し、ケーブルルートを説明するための要部の拡大部分断面図である。
【図7】本発明の第1の実施形態における検知系および電気制御系のシステム構成を示すブロック図である。
【図8】第1の実施形態に係る可動ステップ付きプラットホームドア装置の動作例を示すフローチャートである。
【図9】本発明の第2の実施形態における検知系および電気制御系のシステム構成を示すブロック図である。
【発明を実施するための形態】
【0023】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
【0024】
図1〜図8を参照して本発明に係る可動ステップ付きプラットホームドア装置の第1の実施形態を説明する。この第1の実施形態の構成によれば、可動ステップ装置がプラットホームドア装置に付設された構造を有しており、さらに可動ステップの張り出しおよび格納の動作がホームドアの開閉動作に連動するようになっている。なお図1等では、説明の便宜上、プラットホームの左右の両側を切断し、省略して示している。
【0025】
図1等において、100はプラットホームドア装置の部分であり、200は可動ステップ装置の部分である。プラットホームドア装置100は、全体として柵状の形態を有し、プラットホーム11の軌道(線路)側の縁部11Aに沿って乗客を防護するための壁部として設置されている。プラットホームドア装置100は固定柵と可動柵から成っている。すなわちプラットホームドア装置100は、プラットホーム11の床面に固定された左右一対のドア筐体部101(固定柵)と、各ドア筐体部101内の戸袋構造によって端面のスリット状開口部を通して出し入れ(開閉)自在に設けられた左右一対のホームドア102(可動柵)とから構成されている。さらにプラットホームドア装置100は、ホームドア駆動機構(図1中、図示せず)と、ホームドア用コントローラ103とを備えている。ホームドア駆動機構とホームドア用コントローラ103はドア筐体部101内に設けられている。ホームドア用コントローラ103はマイコン(CPU等)によって作られた制御装置(または制御盤)である。また左右一対のドア筐体部101の間には乗降通路となる開口領域が形成されている。この乗降通路を、左右一対のホームドア102によって開閉する。ホームドア102は、所要の強度を有するドアフレーム部材102aで作られ、この実施形態では透明な強化ガラス102bが嵌め込まれている。利用者は、ホームドア102の透明部(強化ガラス102b)を通して、プラットホーム11の側から軌道側の状態を見ることができる。またホームドア102の開閉動作は、プラットホーム11に停車した列車300(図2〜4に示す)の車両ドア300aの開閉動作と連動している。すなわち、列車300が停車して車両ドア300aが開くとホームドア102が開き、その後車両ドア300aが閉じる時に併せてホームドア102が閉じるように動作する。なお図1〜図3等では一組のプラットホームドア装置100が図示されているが、列車300の複数の車両ドア300aの各々に対応してプラットホームドア装置100は配置されている。
【0026】
可動ステップ装置200は、上記の乗降通路を形成するホーム11の床面に埋設されるように設置されている。可動ステップ装置200は、フラットな形状を有したステップ筐体部201と、ステップ筐体部201の内部にて出し入れ(張り出し・格納)自在に設けられた可動ステップ202と、可動ステップ駆動部203(図5に示す)と、可動ステップ用コントローラ204とから構成されている。可動ステップ駆動部203はステップ筐体部201内に設けられている。可動ステップ用コントローラ204は上記のドア筐体部101内に設けられる。可動ステップ用コントローラ204は、マイコン(CPU等)によって作られた制御装置(または制御盤)である。可動ステップ装置200のステップ筐体部201は、プラットホーム11における乗降通路に対応する領域の縁部に沿って埋設されており、ステップ筐体部201の天板部は乗降通路のホーム床面となっている。また可動ステップ202の張り出し・格納動作はホームドア102の開閉動作に連動している。すなわち、列車300が停止してホームドア102が開くときその開く直前に可動ステップ202が前進して張り出し、他方、ホームドア102が閉まるときその後に可動ステップ202が後退して格納される。さらに詳しくは、可動ステップ202の張り出し動作が完了したことを各種のセンサ(エンコーダ、位置検知センサ等)で確認してホームドア102は開くことになり、他方、ホームドア102の閉じる動作が完了したことを当該センサで確認して可動ステップ202は格納されることになる。
【0027】
次にプラットホームドア装置100の構成についてさらに詳述する。
ドア筐体部101に内蔵されたホームドア102を開閉動作させるホームドア駆動機構は、ホームドア102をプラットホーム11の縁部11Aに対して並行に移動させるためのレールと、ホームドア102を移動させるモータ、モータ駆動部、および動力伝達機構とから構成される。モータ駆動部の動作は、ホームドア用コントローラ103によって制御される。またホームドア用コントローラ103は、上位の列車運転管理コンピュータ(図1中、図示せず)に回線を介して接続されており、各番線に入線し停車する列車に関する情報は事前に当該列車運転管理コンピュータから与えられる。
【0028】
またプラットホームドア装置100では、前述した乗降通路を通して乗客が乗降するとき、その後の列車が発車する段階で、ホームドア102と車両ドアとの間の空間で乗客等が挟まれる等の異常事態の発生を検知するための距離画像センサが設けられている。距離画像センサ104は、例えば、半導体チップの微細構造を利用して作られ、ミラー構造を利用してレーザビームを三次元空間にて走査させることにより設定された検知領域内の存在物を検知する機能を有している。距離画像センサは小型のデバイスであり、図1等ではセンサボックス104の中に設けられている。以下では、説明の便宜上、センサボックス104を「距離画像センサ104」と記す。この距離画像センサ104の設置場所は、図1〜図4に示すように、ドア筐体部101の背面(軌道側の面)であって、例えば図1等において軌道側から見て右側のドア筐体部101の軌道側の面の端部の中間的な高さ位置である。なおドア筐体部101の背面において乗降通路の両側には支柱105が設けられている。
【0029】
距離画像センサ104の検知面は乗降通路の方向に向けられている。図2〜図4において任意の角度で扇形に開いた2本の破線の間として示された領域106は距離画像センサ104の検知領域(撮像領域)を示している。2本の破線の間の領域106で光線の走査が行われる。検知領域106によれば、乗降通路を中心領域として、プラットホーム側および軌道側の間、上方側および下方側の間で所定の領域が設定され、3次元的な検知領域が設定されている。図2〜図4の各々で示された検知領域106の範囲は、距離画像センサ104の検知面を、直交する3軸の座標方向にて走査型で動作させることにより3次元検知領域として設定される。距離画像センサ104による検知領域106では、プラットホーム11の下側領域も検知できるので、乗客の転落等の異常事態も検知することが可能である。さらに図2に示すように、乗降通路において、プラットホーム11の床面の下側の可動ステップ装置200の可動ステップ202が張り出す領域も、距離画像センサ104による検知領域106に含まれる。従って、距離画像センサ104によれば、可動ステップ装置200における可動ステップ202の張り出し状態または格納状態を高い精度で検知することができる。なお図2等で図示された検知領域106は一例であって、可動ステップ装置200の可動ステップ202が張り出す領域が含まれていればよく、図示されたものに限定されるものではない。
【0030】
次いで可動ステップ装置200の構成についてさらに詳述する。
可動ステップ装置200では、図1および図5等に示されるように、ステップ筐体部201においてプラットホーム11の床面近傍の軌道側の面に開口部201aが形成されている。この開口部201aを介して可動ステップ202が張り出され、または格納される。ステップ筐体部201の天板部201bは床面を形成し、乗客の足場になる。天板部201bは本実施形態では例えば3枚備えられている。図5では中央の天板部を取り外して、内部の構造を示している。また図1では可動ステップ202が後退しステップ筐体部201内に格納した状態を示し、図5では可動ステップ202が前進しステップ筐体部201から張り出した状態を示している。図5に示された可動ステップ202の張り出し状態において張り出しの距離(d)は例えば200mmである。可動ステップ装置200の内部には左右の両側部に支持台211が設けられており、それらの間の空間に2本のレール212が設置されている。可動ステップ202は、前側ステップ部202aと、レール212上を移動する基部202bとから構成されている。前側ステップ部202aと基部202bとは一体的に形成される。基部202bがレール212上をレールに係合した状態にて移動することにより、前側ステップ部202aがステップ筐体部201の開口部201aから出し入れされる。こうして可動ステップ202は張り出し動作または格納動作を行う。可動ステップ202の基部202bの下面にはボールネジ機構が設けられ、ボールネジ機構を介してリニアのレール212に連結されており、このボールネジ機構の回転軸をサーボモータ213で回転させる。214はサーボモータ213のモータ駆動部である。サーボモータ213にはエンコーダ213aが状態検知センサとして付加されている。このエンコーダ213aの検知信号に基づいてサーボモータ213およびモータ駆動部214の状態が検知される。さらに、可動ステップ202の移動位置を検知する位置検知センサ215が付設されている。位置検知センサ215は例えば光学的な反射型センサであり、可動ステップ202の任意の場所を検出することにより、可動ステップ202が前進位置(張り出し位置)にあるか否かまたは後退位置(格納位置)にあるか否かを検知する機能を有している。この位置検知センサ215によって可動ステップ202の移動位置が検知され、その動きが検知される。
【0031】
なお、図1中の領域Aを拡大部分断面で示した図6に示されるように、可動ステップ装置200内の検知系および電気制御系との間での給電および信号送受の構成については、プラットホームドア装置100を支持するベース21に設けられた孔22を通して配線されたケーブル23によって、ドア筐体部101内に設けられた電気制御系とつながっている。本実施形態に係る可動ステップ付きプラットホームドア装置では、前述した通り、可動ステップ用コントローラ204はドア筐体部101内に配置されている。可動ステップ装置200のステップ筐体部201内に設けられたモータ駆動部214に対する可動ステップ用コントローラ204からの動作制御信号(電源電力)の供給、エンコーダ213aおよび位置検知センサ215からの各検知信号の可動ステップ用コントローラ204への伝送は、ケーブル23を経由して行われる。
【0032】
図7に示したシステム構成図と図8に示したフローチャートに基づいて、本実施形態に係る可動ステップ付きプラットホームドア装置の要部の構成と動作例を説明する。
可動ステップ付きプラットホームドア装置は、システム的に、プラットホームドア装置100の構成部と可動ステップ装置200の構成部とから成っている。
【0033】
プラットホームドア装置100の構成部は、中央部分にはホームドア用コントローラ103が位置し、その入力側に距離画像センサ104が配置され、その出力側にホームドア駆動機構31と警報装置32が配置される。警報装置32は、例えば警告灯や警報音発生器である。ホームドア駆動機構31は、ホームドア102を開閉動作させる。またホームドア用コントローラ103には、外部より、ホーム入線情報33と入線した車両の車両ドアの開閉情報34とが入力される。またホームドア用コントローラ103は通信回線35を介して上位の列車運転管理コンピュータ36に接続されている。ホームドア用コントローラ103は、ホーム入線情報33と入線した車両の車両ドアの開閉情報34を取得して、ホームドア駆動機構31の動作を制御し、車両ドアの開閉動作に連動させてホームドア102を開閉する。そしてホームドア102の開閉動作の制御の際において、距離画像センサ104によって検知領域106内の状態を検知し、距離画像センサ104から異常情報が与えられない場合にはホームドア102を開閉制御し、異常情報が与えられる場合にはホームドア102の開閉動作の制御を停止して警報装置32を駆動する。
【0034】
可動ステップ装置200の構成部はプラットホームドア装置100の構成部に対して下位的な位置に設けられる。可動ステップ装置200の構成部は、可動ステップ用コントローラ204と、サーボモータ213およびモータ駆動部214と、エンコーダ(状態検知センサ)213aと、位置検知センサ215とから成っている。可動ステップ用コントローラ204は、上位のホームドア用コントローラ103からの動作指令を受けてモータ駆動部214およびサーボモータ213の各動作を制御し、可動ステップ202の張り出し動作および格納動作を制御する。すなわち、ホームドア102が開くときその前に可動ステップ202を張り出すように動作指令を受け、ホームドア102が閉じるときその後に可動ステップ202を格納するように動作指令を受ける。可動ステップ202の張り出しと格納の各動作が正常に行われているか否かについては、先ず第1に、可動ステップ用コントローラ204が、エンコーダ213aと位置検知センサ215の各検知信号に基づいて判断する。すなわち、可動ステップ用コントローラ204は、エンコーダ213aからの検知信号または位置検知センサ215からの検知信号によって張り出しまたは格納の完了を知らせる信号を受信しないときには、可動ステップ202の状態が異常であると判断して、上位のホームドア用コントローラ103に通知する。ホームドア用コントローラ103は、可動ステップ用コントローラ204からの異常通知を受けると、さらに上位の列車運転管理コンピュータ36に通知すると共に、ホームドア102の開閉動作の制御を停止し、かつ警報装置32を駆動する。従って、ホームドア用コントローラ103は、可動ステップ202の動作の異常状態を、エンコーダ(状態検知センサ)213aからの検知信号(第1の検知ルート)、または位置検知センサ215からの検知信号(第2の検知ルート)により、可動ステップ用コントローラ204の判断を通して監視することになる。
【0035】
但し、この場合に、可動ステップ用コントローラ204の動作それ自体に異常に生じたときには、可動ステップ202の動作の異常状態を監視することが不可能になる。このような場合には、距離画像センサ104の検知領域106によって可動ステップ202の張り出し・格納動作の異常または正常を判断することができるので、距離画像センサ104の検知信号(第3の検知ルート)に基づいてホームドア用コントローラ103は可動ステップ202の動作状態を監視することができる。この場合、距離画像センサ104の検知信号は、可動ステップ202の動作状態の判断基準としては優先順位が高く設定されている。すなわち、例えば、ホームドア用コントローラ103は、可動ステップ用コントローラ204から異常通知を受け取らない状態で、距離画像センサ104によってホームに車両が停車している時以外に可動ステップ202が張り出している状態を検知したときには、プラットホームドア装置100の動作を停止させ、警報装置32を作動させる。また例えば、ホームドア用コントローラ103が可動ステップ用コントローラ204から異常通知を受け取らない状態で、距離画像センサ104によってホームに車両が停車している時に可動ステップ202が格納されている状態を検知したときにも、同様である。
【0036】
図8に示した可動ステップ202の異常動作の検知に係る処理の流れを説明する。この処理はホームドア用コントローラ103で実行される。ホームドア用コントローラ103は、基本的に全体として、必要なタイミングで、プラットホームドア装置100と可動ステップ装置200の各動作の制御を実行する(処理ステップS10)。この制御の処理ステップS10は、ホームに入線し車両ドアを開閉する列車の動作に連動させて行われるホームドア102の開閉動作制御(処理ステップS11)および可動ステップ202の張り出し・格納動作制御(処理ステップS12)とから成っている。張り出し・格納動作制御(処理ステップS12)は可動ステップ用コントローラ204を経由して行われる。ホームドア102の開閉動作と可動ステップ202の張り出し・格納動作は所定の順序関係に基づいて連動している。さらに、その際には、可動ステップ202の張り出し・格納動作に異常が生じているか否かが判断される(判断ステップS13)。判断ステップS13で異常が生じていない(NO)ときには、次の判断ステップS14で制御を行うタイミングであるかを判断し、制御を行うタイミングであると判断された場合(YES)には、処理ステップS10に戻り、適切なタイミングでホームドア102の開閉動作制御(処理ステップS11)と可動ステップ202の張り出し・格納動作制御(処理ステップS12)を実行する。判断ステップS14で制御を行うタイミングでない(NO)と判断された場合には、その前の動作状態を維持し継続する(処理ステップS15)。
【0037】
次に、上記の判断ステップS13で異常が生じている(YES)ときには、すべての制御を停止して警報装置32を駆動する(処理ステップS16)。これにより、危険な状態が回避され、警報が発せられる。
【0038】
上記の判断ステップS13では、より詳しくは、前述した通り、エンコーダ213aの検知信号もしくは位置検知センサ215の検知信号に基づく可動ステップ用コントローラ204の異常通知(第1および第2の検知ルート)、または、距離画像センサ104の可動ステップ202に関する張り出し・格納状態の検知信号(第3の検知ルート)に基づいて、可動ステップ202の張り出し・格納動作について異常が生じているか否かが判断される。
【0039】
上記の通り、本実施形態に係る可動ステップ付きプラットホームドア装置よれば、可動ステップ装置100側に元々装備されていたエンコーダ213aの検知信号または位置検知センサ215の検知信号に基づいて可動ステップ202の動作の正常または異常を監視すると共に、さらに、プラットホームドア装置100側に元々装備されていた距離画像センサ104の検知領域を変更して可動ステップ202の張り出し・格納状態を検知することでその動作の正常または異常を監視することができ、これにより可動ステップ202の監視を三重化することができる。この場合には、可動ステップ装置200の可動ステップ用コントローラ204の機能に異常が生じたときにも距離画像センサ104により確実に当該異常を検知することができる。
【0040】
なお、上記の実施形態の可動ステップ202の正常・異常動作の検知構成では、2つのコントローラ103,204の間に主従関係があり、かつ第1および第2の検知ルートと第3の検知ルートに関して優先順位をつけて検知を行うようにした。しかしながら、本発明の構成はこの検知構成に限定されない。例えば、ホームドア用コントローラ103において、前述の第1から第3の検知ルートで得られる検知信号を比較・照合し、それらの間の一致または不一致を判断し、少なくともいずれか1つの検知信号が異常を示す場合には制御を停止して警報を発するように構成することもできる。
さらに、ホームドア用コントローラ103において、可動ステップ用コントローラ204による可動ステップ202の動作状態に関する正常または異常の判断結果と、距離画像センサ104が出力する検知信号との一致または不一致を判断し、これに基づき最終的に距離画像センサ104の検知信号を優先して可動ステップ202の動作状態の正常または異常を判断するように構成することもできる。
【0041】
次に、図9を参照して本発明に係る可動ステップ付きプラットホームドア装置の第2の実施形態を説明する。図9は、先に説明した図7に対応する図であり、第2の実施形態の検知系および電気制御系のシステム構成を示している。
【0042】
このシステム構成では、ホームドア用コントローラ103と可動ステップ用コントローラ204が1つのコンピュータユニット40の中に配置されている。可動ステップ用コントローラ204はホームドア用コントローラ103からの指令を受け、可動ステップ装置200側のモータ駆動部215の動作を制御して可動ステップ202を張り出し・格納動作させる。
他方、可動ステップ装置200側のエンコーダ213aおよび位置検知センサ215から出力される各検知信号はホームドア用コントローラ103に直接に入力されている。またプラットホームドア装置100側の距離画像センサ104からの検知信号もホームドア用コントローラ103に入力されている。
上記の構成によれば、ホームドア用コントローラ103は、エンコーダ213aおよび位置検知センサ215からの各検知信号、距離画像センサ104からの検知信号の一致または不一致を比較・照合し、3つの検知信号が正常で一致しているときにはホームドアの開閉動作および可動ステップの張り出し・格納動作について通常の制御を行い、他方、これらの検知信号の少なくともいずれか1つに異常を検知する信号が含まれるときには、可動ステップ付きプラットホームドア装置の全動作に係る制御を停止し、警報装置32により警報を発する。
【0043】
なお上記の実施形態の説明では、可動ステップを装備したプラットホームドア装置としての装置構成を説明したが、可動ステップ装置が単独の個別な製品機械であって、当該可動ステップ装置を、既存のプラットホームドア装置に組み付けて付設するように構成する場合にも、距離画像センサを利用して同様な三重の検知ルートから成る検知系を構成することが可能である。
【0044】
以上の実施形態で説明された構成、形状、大きさ、および配置関係については本発明が理解・実施できる程度に概略的に示したものにすぎず、また数値等については例示にすぎない。従って本発明は、説明された実施形態に限定されるものではなく、特許請求の範囲に示される技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【産業上の利用可能性】
【0045】
本発明に係る可動ステップ付きプラットホームドア装置は、ホームドアの開閉動作と可動ステップの張り出し・格納動作とが連動するように構成された装置において、ホームと列車の間の隙間を埋める可動ステップの張り出し動作等の異常を、エンコーダおよび位置検知センサからの各検知信号に加えて、距離画像センサからの検知信号をも利用して監視するようにし、これにより可動ステップ用コントローラで動作異常が発生したときであっても確実に可動ステップの動作の正常または異常を監視することに利用される。
【符号の説明】
【0046】
11 プラットホーム
11A 縁部
21 ベース
22 孔
23 ケーブル
31 ホームドア駆動機構
32 警報装置
33 ホーム入線情報
34 車両ドア開閉情報
36 列車運転管理コンピュータ
100 プラットホームドア装置
101 ドア筐体部
102 ホームドア
103 ホームドア用コントローラ
104 距離画像センサ
105 支柱
106 検知領域
200 可動ステップ装置
201 ステップ筐体部
201a 開口部
201b 天板部
202 可動ステップ
202a 前側ステップ部
202b 基板
204 可動ステップ用コントローラ
211 支持台
212 レール
213 サーボモータ
213a エンコーダ
214 モータ駆動部
215 位置検知センサ
300 列車
300a 車両ドア
【特許請求の範囲】
【請求項1】
ドア部と、前記ドア部の開閉動作を制御する第1コントローラと、可動ステップと、前記可動ステップの張り出し・格納動作を制御する第2コントローラとを備え、前記第1コントローラおよび前記第2コントローラの制御に基づき、プラットホームに停車した列車の車両ドアの開閉動作と連動して、前記ドア部の開閉動作と前記可動ステップの張り出し・格納動作とが行われる可動ステップ付きプラットホームドア装置において、
前記可動ステップを移動させるモータおよびモータ駆動部の状態を検知する状態検知センサと、
前記可動ステップの移動位置を検知する位置検知センサと、
前記可動ステップの張り出し・格納動作の状態を監視する距離画像センサと、を備え、
前記状態監視センサと前記位置検知センサと前記距離画像センサの各々の出力信号のいずれかに基づいて前記可動ステップの動作状態の正常または異常を判断するようにしたことを特徴とする可動ステップ付きプラットホームドア装置。
【請求項2】
前記状態検知センサと前記位置検知センサの各々の出力信号に基づく前記正常または異常の判断は前記第2コントローラで行われ、前記距離画像センサの出力信号に基づく前記正常または異常の判断は前記第1コントローラで行われることを特徴とする請求項1記載の可動ステップ付きプラットホームドア装置。
【請求項3】
前記第2コントローラから出力される判断結果に係る情報は前記第1コントローラに与えられることを特徴とする請求項2記載の可動ステップ付きプラットホームドア装置。
【請求項4】
前記第1コントローラは、前記第2コントローラによる前記正常または異常の判断結果と前記距離画像センサの出力信号との一致または不一致に基づき、最終的に前記距離画像センサの出力信号を優先して前記可動ステップの動作状態の正常または異常を判断することを特徴とする請求項3記載の可動ステップ付きプラットホームドア装置。
【請求項5】
前記状態検知センサ、前記位置検知センサ、前記距離画像センサの各出力信号は前記第1コントローラに入力され、これらの出力信号に基づく前記正常または異常の判断は前記第1コントローラで行われることを特徴とする請求項1記載の可動ステップ付きプラットホームドア装置。
【請求項1】
ドア部と、前記ドア部の開閉動作を制御する第1コントローラと、可動ステップと、前記可動ステップの張り出し・格納動作を制御する第2コントローラとを備え、前記第1コントローラおよび前記第2コントローラの制御に基づき、プラットホームに停車した列車の車両ドアの開閉動作と連動して、前記ドア部の開閉動作と前記可動ステップの張り出し・格納動作とが行われる可動ステップ付きプラットホームドア装置において、
前記可動ステップを移動させるモータおよびモータ駆動部の状態を検知する状態検知センサと、
前記可動ステップの移動位置を検知する位置検知センサと、
前記可動ステップの張り出し・格納動作の状態を監視する距離画像センサと、を備え、
前記状態監視センサと前記位置検知センサと前記距離画像センサの各々の出力信号のいずれかに基づいて前記可動ステップの動作状態の正常または異常を判断するようにしたことを特徴とする可動ステップ付きプラットホームドア装置。
【請求項2】
前記状態検知センサと前記位置検知センサの各々の出力信号に基づく前記正常または異常の判断は前記第2コントローラで行われ、前記距離画像センサの出力信号に基づく前記正常または異常の判断は前記第1コントローラで行われることを特徴とする請求項1記載の可動ステップ付きプラットホームドア装置。
【請求項3】
前記第2コントローラから出力される判断結果に係る情報は前記第1コントローラに与えられることを特徴とする請求項2記載の可動ステップ付きプラットホームドア装置。
【請求項4】
前記第1コントローラは、前記第2コントローラによる前記正常または異常の判断結果と前記距離画像センサの出力信号との一致または不一致に基づき、最終的に前記距離画像センサの出力信号を優先して前記可動ステップの動作状態の正常または異常を判断することを特徴とする請求項3記載の可動ステップ付きプラットホームドア装置。
【請求項5】
前記状態検知センサ、前記位置検知センサ、前記距離画像センサの各出力信号は前記第1コントローラに入力され、これらの出力信号に基づく前記正常または異常の判断は前記第1コントローラで行われることを特徴とする請求項1記載の可動ステップ付きプラットホームドア装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−63693(P2013−63693A)
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願番号】特願2011−203012(P2011−203012)
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成25年4月11日(2013.4.11)
【国際特許分類】
【出願日】平成23年9月16日(2011.9.16)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]