
可動ライナーを有するブロックモールド
【課題】改良されたコンクリートブロックを製造するためのモールドアセンブリを提供する
【解決手段】コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されたモールドアセンブリ30である。該モールドアセンブリは、少なくとも第一のライナープレート32が移動可能である少なくとも第一のモールドキャビティ46と、駆動アセンブリ550を形成する複数のライナー32とを含む。該駆動アセンブリは、第一の端部を有し、第二の端部に隣接した第一の可動ライナープレート32に連結された第一の駆動要素572と、アクチュエータアセンブリ607とを含む。該アクチュエータアセンブリは、第一の端部に隣接して第一の駆動要素に選択的に連結された第二の駆動要素607を含む。該アクチュエータアセンブリは、第二の駆動要素を第一の軸に沿って駆動するように構成されている。
【解決手段】コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されたモールドアセンブリ30である。該モールドアセンブリは、少なくとも第一のライナープレート32が移動可能である少なくとも第一のモールドキャビティ46と、駆動アセンブリ550を形成する複数のライナー32とを含む。該駆動アセンブリは、第一の端部を有し、第二の端部に隣接した第一の可動ライナープレート32に連結された第一の駆動要素572と、アクチュエータアセンブリ607とを含む。該アクチュエータアセンブリは、第一の端部に隣接して第一の駆動要素に選択的に連結された第二の駆動要素607を含む。該アクチュエータアセンブリは、第二の駆動要素を第一の軸に沿って駆動するように構成されている。
【発明の詳細な説明】
【技術分野】
【0001】
(関連出願の引用)
本出願の内容は、米国仮特許出願第60/679,464号(2005年5月10日出願)の内容に関連し、米国特許法第119条第(e)項の優先権の利益を主張するものであり、参考として本明細書に援用される。
【0002】
本出願は、米国特許出願第10/629,460号(2003年7月29日出願、発明の名称「CONCRETE BLOCK MOLD WITH MOVEABLE LINER」、代理人事件番号H295.101.101)、米国特許出願第10/879,381号(2004年6月29日出願、発明の名称「CONCRETE BLOCK MOLD WITH MOVEABLE LINER」、代理人事件番号H295.104.101)および米国特許出願第11/036,147号(2005年1月13日出願、発明の名称「BLOCK MOLD HAVING MOVEABLE LINER」、代理人事件番号H295.107.101)に関連し、それらのすべては参考として本明細書に援用される。
【0003】
(発明の分野)
本発明は、ブロックモールドに関し、特に、コンクリートブロックマシンで使用するように構成された、少なくとも1つの可動ライナーを有するコンクリートブロックモールドに関する。
【背景技術】
【0004】
コンクリートブロックは、コンクリートメーソンリユニット(concrete masonry unit:CMU)とも称され、一般的に、モールドボックスを形成するように組み立てられたモールドフレームを用いたコンクリートブロックマシンを使用して、種々の形状に形成することによって製造される。形成されるべきブロックの所望のネガティブ形状を有するモールドキャビティが、モールドボックス内に備えられる。サポートボード、すなわちパレットが、コンベアシステムを経てパレットテーブル上に移動する。パレットテーブルは、パレットが接触してモールドボックスの下部を形成するまで上方に移動する。次いで、キャビティには、可動供給ボックスドロワによってコンクリートが充填される。
【0005】
モールドにコンクリートが充填されると、供給ボックスドロワが格納位置に戻り、プランジャ、すなわちヘッドシューアセンブリがモールドの上部を形成するように下降する。ヘッドシューアセンブリは、一般的に、モールドキャビティの上部外面に合わせられ、油圧的または機械的にコンクリート上に押し付けられる。ヘッドシューアセンブリは、コンクリートを所望のポンド/平方インチ(psi)およびブロックの寸法に加圧し、同時に、振動テーブルとともにモールドを振動させて、モールドキャビティ全体を実質的に加圧してコンクリートを最適に行き渡らせる。
【0006】
加圧によって、コンクリートは、完成ブロックをモールドから即座に取り外すことができるような硬さのレベルに達する。完成したブロックを取り外すには、モールドを固定したままで、対応するパレットとともにシューおよびパレットテーブルを下方に移動させ、ブロックをモールドからパレット上に押し出す。ヘッドシューアセンブリの底縁がモールドの底縁をクリアにすると、コンベアシステムが完成ブロックを載せたパレットを前方に移動させ、別のパレットがモールドの下に配置される。次いで、パレットテーブルが次のパレットを上昇させて、次のブロックのためのモールドボックスの底部を形成し、プロセスが繰り返される。
【0007】
多くの種類のCMU(例、舗装材料、パティオブロック、軽量ブロック、シンダーブロックなど)、特に土留め壁ブロックおよび建築ユニットの場合、ブロックの少なくとも1つの面が、石材状のテクスチャのような所望のテクスチャを有することが望ましい。所望のテクスチャをブロックの表面に作製するための1つの手法は、テクスチャの所望のネガティブパターンをモールドの側壁上に提供するものである。しかし、その手法では完成ブロックがモールドから垂直に取り出されるので、ブロックが取り出される前にモールド内部から離れない限り、いかなるパターンまたはテクスチャも側壁から取り除かれてしまう。
【発明の概要】
【発明が解決しようとする課題】
【0008】
モールドの側壁を移動させるために用いられる1つの手法では、モールドの側壁を内側に移動させて、対抗ばねが側壁をモールドの中央から外側に押すようなカム機構の使用を伴う。しかし、この手法では、側壁が内側に移動させられ、ばねに蓄えられたエネルギに依存して側壁を外側に移動させるときにのみ、側壁に“動的な”力を加える。ばねに蓄えられたエネルギは、側壁がコンクリートに固着した場合には、側壁を引き込むには不十分になる可能性がある。加えて、コンクリートブロックマシンの限られた範囲内でカム機構を用いることが困難になる可能性がある。
【0009】
第二の手法では、ピストンを使用した側壁の伸長および引き込みを伴う。しかし、ピストンシャフトのシャフトが可動側壁に直接連結されており、可動側壁の移動方向に従って移動する。したがって、ヘッドシューアセンブリによるコンクリートの加圧中に、ピストンシャフトを経て膨大な圧力がピストンに直接加えられる。結果的に、コンクリートの加圧中および振動中に側壁を適所に保持するには、高いpsiレーティングを有するピストンが必要となる。加えて、ピストンシャフトに直接圧力が加わることで、ピストンの摩耗が増加し、期待耐用年数が短くなる可能性がある。
【課題を解決するための手段】
【0010】
本発明の一実施態様は、コンクリートブロックを製造する、コンクリートブロックマシンで使用するように構成されたモールドアセンブリを提供する。該モールドアセンブリは、少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティと、駆動アセンブリとを形成する複数のライナーを含む。該駆動アセンブリは、第一の端部を有し、第二の端部に隣接した該第一の可動ライナープレートに連結された第一の駆動要素と、アクチュエータアセンブリとを含む。該アクチュエータアセンブリは、第一の端部に隣接した該第一の駆動要素に選択的に連結された第二の駆動要素を含み、該アクチュエータアセンブリは、該第一の駆動要素の少なくとも該第二の端部を第二の軸に沿って移動させ、該第一の可動ライナープレートを該第一のモールドキャビティに向かうように、およびこれから離れるように移動させるように、該第二の駆動要素を第一の軸に沿って駆動するように構成されている。
例えば、本願発明は以下を提供する。
(項目1)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部を有し、第二の端部に隣接した上記第一の可動ライナープレートに連結された第一の駆動要素と、上記第一の端部に隣接した上記第一の駆動要素に選択的に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第二の駆動要素を第一の軸に沿って駆動するように構成されていることにより、少なくとも上記第一の駆動要素の上記第二の端部を第二の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目2)
上記第二の軸は、上記第一の軸に対して実質的に垂直である、項目1に記載のモールドアセンブリ。
(項目3)
上記第二の駆動要素はレール要素を含み、上記第一の駆動要素は上記レール要素に摺動可能に連結されている、項目1に記載のモールドアセンブリ。
(項目4)
上記レール要素は、実質的に線状であり、上記第一の軸との角度がゼロではない、項目3に記載のモールドアセンブリ。
(項目5)
上記レール要素は、上記第一の軸に比べて曲線である、項目3に記載のモールドアセンブリ。
(項目6)
上記第一の駆動要素は、上記レール要素を摺動可能に受けて、これとインターロックするように構成されている上記第一の要素に隣接したチャネルを含む、項目3に記載のモールドアセンブリ。
(項目7)
上記第一の駆動要素は、上記レール要素を摺動可能に受けるように間隔が置かれ、上記レール要素に追従するように構成されている複数のローラ要素を含む、項目3に記載のモールドアセンブリ。
(項目8)
上記第一の駆動要素は、上記第一の端部に隣接した上記第二の駆動要素に回転可能に連結され、上記第二の端部に隣接した上記第一の可動ライナープレートに回転可能に連結されている、項目1に記載のモールドアセンブリ。
(項目9)
第一の端部に隣接して上記第二の駆動要素に連結され、第二の端部に隣接して第二のモールドキャビティの第二の可動ライナープレートに連結された、第三の駆動要素をさらに含み、上記第一の軸に沿って上記第二の駆動要素を駆動する上記アクチュエータアセンブリに応答して、少なくとも上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って移動して、上記第二のライナープレートを上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目1に記載のモールドアセンブリ。
(項目10)
上記第一および第二の可動ライナープレートの移動は、実質的に上記第二の軸に平行である、項目9に記載のモールドアセンブリ。
(項目11)
上記駆動アセンブリは、
上記第一の駆動要素と上記第一の可動ライナープレートとの間に選択的に連結された第三の駆動要素と、
上記第一の駆動要素と第二のモールドキャビティの第二の可動ライナープレートとの間に選択的に連結された第四の駆動要素と
を含み、上記第三の駆動要素が第三の軸を移動させ、上記第四の駆動要素が第四の軸に沿って移動することにより、それぞれが上記第一および上記第二の可動ライナープレートを上記第一および上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させ、上記第三および上記第四の軸は、実質的に上記第一の軸に平行である、項目1に記載のモールドアセンブリ。
(項目12)
上記第一および上記第二の可動ライナープレートの移動は、実質的に上記第一の軸の方向に平行である、項目10に記載のモールドアセンブリ。
(項目13)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部と第二の端部とを有し、上記第二の端部が上記第一の可動ライナープレートに回転可能に連結された第一の駆動要素と、上記第一の駆動要素の上記第一の端部に回転可能に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第二の駆動要素を上記第一の軸に沿って駆動するように構成されていることにより、上記第一の駆動要素の上記第一の端部が回転して第一の軸に沿って移動し、上記第二の端部が回転して、上記第一の軸に実質的に垂直である第二の軸に沿って移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目14)
上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って第一の方向に移動させるときに、上記第一の駆動要素の上記第二の端部が上記第二の軸に沿って第一の方向に移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部から離れるように移動させ、上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って第二の方向に移動させるときに、上記第一の駆動要素の上記第二の端部が上記第二の軸に沿って第二の方向に移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように移動させる、項目13に記載のモールドアセンブリ。
(項目15)
上記駆動アセンブリは、上記第二の駆動要素に回転可能に連結された第一の端部と、第二のモールドキャビティの第二の可動ライナープレートに回転可能に連結された第二の端部とを有する第三の駆動要素をさらに含み、上記第一の端部が上記第一の軸に沿って移動し、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って移動して、上記第二の駆動要素が上記第一の軸に沿って移動するときに、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目14に記載のモールドアセンブリ。
(項目16)
上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って上記第一の方向に移動させるときに、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って上記第二の方向に移動し、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部から離れるように移動させ、上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って上記第二の方向に移動させるときに、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って上記第一の方向に移動し、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部に向かうように移動させる、項目15に記載のモールドアセンブリ。
(項目17)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の駆動要素を有するアクチュエータアセンブリと、上記第一の駆動要素と上記第一の可動ライナープレートとの間に連結された第二の駆動要素とを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第一の駆動要素を上記第一の軸に沿って駆動するように構成されていることにより、上記第二の駆動要素を第一の軸に垂直な第二の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目18)
上記第二の駆動要素は第一の傾斜チャネルを含み、上記駆動アセンブリは、上記第一の可動ライナープレートに連結され、上記第二の駆動要素の上記第一の複数の傾斜チャネルと摺動可能にインターロックするように構成されている複数の傾斜チャネルを有する第三の駆動要素をさらに含み、上記第二の駆動要素の上記第一の複数の傾斜チャネルと上記第三の駆動要素の上記複数の傾斜チャネルとの間の相互作用は、上記第二の駆動要素の上記第二の軸に沿った移動に応答して、上記第三の駆動要素を第三の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目17に記載のモールドアセンブリ。
(項目19)
上記第二の駆動要素は、第二の複数の傾斜チャネルを含み、上記駆動アセンブリは、第二のモールドキャビティの第二の可動ライナープレートに連結され、上記第二の駆動要素の上記第二の複数の傾斜チャネルと摺動可能にインターロックするように構成されている複数の傾斜チャネルを有する第四の駆動要素をさらに含み、上記第二の駆動要素の上記第二の軸に沿った移動に応答して、上記第二の駆動要素の上記第二の複数の傾斜チャネルと、上記第四の駆動要素の上記複数の傾斜チャネルとの間の相互作用は、上記第四の駆動要素を更なる軸に沿って移動させ、上記第二の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目18に記載のモールドアセンブリ。
(項目20)
上記第三および上記第四の軸は上記第一の軸に実質的に平行であり、上記第一および上記第二の可動ライナープレートの上記第一および第二のモールドキャビティの内部に向かう、およびこれから離れる動作は、上記第一の軸に実質的に平行である、項目19に記載のモールドアセンブリ。
(項目21)
上記第一の軸に沿った第一の方向への上記第一の駆動要素の動作は、上記第二の駆動要素の上記第二の軸に沿った第一の方向への動作を生じさせ、上記第三の駆動要素の上記第三の軸に沿った第一の方向への動作および上記第一の可動ライナープレートの上記第一のモールドキャビティの内部に向かう動作を生じさせ、ならびに上記第四の駆動要素の上記第四の軸に沿った第一の方向への動作および上記第二の可動ライナープレートの上記第二のモールドキャビティの内部に向かう動作を生じさせ、上記第三の軸に沿った上記第一の方向は、上記第四の軸に沿った上記第一の方向と反対である、項目19に記載のモールドアセンブリ。
(項目22)
上記第一の軸に沿った第二の方向への上記第一の駆動要素の動作は、上記第二の駆動要素の上記第二の軸に沿った第二の方向への動作を生じさせ、上記第三の駆動要素の上記第三の軸に沿った第二の方向への動作および上記第一の可動ライナープレートの上記第一のモールドキャビティの内部から離れる動作を生じさせ、ならびに上記第四の駆動要素の上記第四の軸に沿った第二の方向への動作および上記第二の可動ライナープレートの上記第二のモールドキャビティの内部から離れる動作を生じさせ、上記第三の軸に沿った上記第二の方向は、上記第四の軸に沿った上記第二の方向と反対である、項目21に記載のモールドアセンブリ。
【図面の簡単な説明】
【0011】
【図1】図1は、本発明による可動ライナープレートを有するモールドアセンブリの1つの例示的な実施態様の斜視図である。
【図2】図2は、本発明によるギア駆動アセンブリおよび可動ライナープレートの1つの例示的な実施態様の斜視図である。
【図3−1】図3Aは、図2に示されたギア駆動アセンブリおよび可動ライナープレートの上面図である。
【図3−2】図3Bは、図2に示されたギア駆動アセンブリおよび可動ライナープレートの側面図である。
【図4】図4Aは、ライナープレートを引き込んだ、図1のモールドアセンブリの上面図である。図4Bは、ライナープレートを伸長した、図1のモールドアセンブリの上面図である。
【図5】図5Aは、本発明によるギアプレートの1つの例示的な実施態様の上面図である。図5Bは、図5Aに示されるギアプレートの端面図である。図5Cは、本発明によるギアヘッドの1つの例示的な実施態様の底面図である。図5Dは、図5Cのギアヘッドの端面図である。
【図6】図6Aは、本発明によるギアトラックの1つの例示的な実施態様の上面図である。図6Bは、図6Aのギアトラックの側面図である。図6Cは、図6Aのギアトラックの端面図である。
【図7】図7は、本発明によるギアトラックとギアプレートとの関係を示す図である。
【図8−1】図8Aは、本発明によるギアヘッドと、ギアプレートと、ギアトラックとの関係を示す上面図である。
【図8−2】図8Bは、図8Aの実例の側面図である。図8Cは、図8Aの実例の端面図である。
【図9−1】図9Aは、本発明によるギアトラック内の引き込み位置にあるギアプレートの1つの例示的な実施態様を示す上面図である。
【図9−2】図9Bは、本発明によるギアトラックから伸長した位置にあるギアプレートの1つの例示的な実施態様を示す上面図である。
【図10】図10Aは、本発明による駆動ユニットの1つの例示的な実施態様を示す図である。図10Bは、図10Aの実例の駆動ユニットの部分的な上面図である。
【図11−1】図11Aは、本発明によるモールドアセンブリの1つの例示的な実施態様を示す上面図である。
【図11−2】図11Bは、本発明によるギア駆動アセンブリの1つの例示的な実施態様を示す図である。
【図12】図12は、本発明によるモールドアセンブリの1つの例示的な実施態様の一部を示す斜視図である。
【図13】図13は、本発明によるギア駆動アセンブリの1つの例示的な実施態様を示す斜視図である。
【図14】図14は、本発明によるモールドアセンブリおよびギア駆動アセンブリの一部の1つの例示的な実施態様を示す上面図である。
【図15−1】図15Aは、スタビライザアセンブリを用いたギア駆動アセンブリの1つの例示的な実施態様の一部を示す上面図である。
【図15−2】図15Bは、図15Aのギア駆動アセンブリの断面図である。図15Cは、図15Aのギア駆動アセンブリの断面図である。
【図16】図16は、本発明によるギア駆動アセンブリおよび可動ライナープレートの1つの例示的な実施態様の一部を示す側面図である。
【図17】図17は、本発明による制御システムを用いたモールドアセンブリの1つの例示的な実施態様を示すブロック図である。
【図18−1】図18Aは、本発明によるねじ駆動システムを用いたギア駆動アセンブリの1つの例示的な実施態様の一部を示す上面図である。
【図18−2】図18Bは、図18Aのギア駆動アセンブリの側断面図である。図18Cは、図18Aのギア駆動アセンブリの長手方向断面図である。
【図19】図19Aは、本発明による駆動アセンブリの一実施態様の斜視図である。図19Bは、図19Aの駆動アセンブリの上面図である。
【図20】図20は、本発明による駆動アセンブリの一実施態様の斜視図である。
【図21】図21は、本発明による駆動アセンブリの一実施態様の上面図である。
【図22】図22は、本発明による駆動アセンブリの一実施態様の上面図である。
【図23】図23は、本発明による駆動アセンブリの一実施態様の斜視図である。
【発明を実施するための形態】
【0012】
以下の詳細な説明においては、本発明の一部を形成し、本発明を実施することが可能な特定の実施例を例証するために示される添付図面を参照する。この点に関して、“上部”、“下部”、“前部”、“背部”、“先行”、“背向”などのような方向を示す用語は、記載されている図面の方向に関連して使用される。本発明の実施態様の構成要素は、複数の異なる方向に配置することができるので、方向を示す用語は図示のために使用されるものであり、制限するためのものではない。本発明の範囲から逸脱することなく、他の実施態様を用いることが可能であり、また構造的または論理的な変更を行うことが可能であるものと理解されたい。したがって、以下の発明を実施するための最良の形態は、限定的に取り入れられるものではなく、本発明の範囲は添付の特許請求の範囲によって定義される。
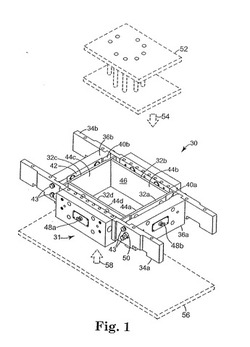
【0013】
図1は、本発明による可動ライナープレート32a、32b、32cおよび32dを有するモールドアセンブリ30の1つの例示的な実施態様の斜視図である。モールドアセンブリ30は、それぞれが内壁38a、38b、40aおよび40bを有し、内表面がモールドボックス42を形成するように互いに連結された、側方部材34aおよび34bと、横断部材36aおよび36bとを有する駆動システムアセンブリ31を含む。図示した実施態様では、横断部材36aおよび36bは、ボルト37によって側方部材34aおよび34bにボルトで固定される。
【0014】
可動ライナープレート32a、32b、32cおよび32dは、モールドキャビティ46を形成するように、それぞれが前面部44a、44b、44cおよび44dを有する。図示した実施態様では、各ライナープレートは、隣接したモールドフレーム部材の内部に位置する関連するギア駆動アセンブリを有する。ライナープレート32aに対応し、横断部材36aの内部に位置するギア駆動アセンブリ50の一部が、側方部材34aを通って延在していることが示されている。各ギア駆動アセンブリは、関連するライナープレートに選択的に連結され、関連する横断部材に平行な第一の方向に第一の力を加えることによって、モールドキャビティ46の内部に向かってライナープレートを移動させ、また第一の方向と反対の方向に第二の力を加えることによって、モールドキャビティ46の内部から離れるようにライナープレートを移動させるように構成されている。側方部材34aおよび34b、および横断部材36aおよび36bは、部材内に伸長し、対応するギア要素を潤滑する対応する潤滑ポートをそれぞれ有する。例えば、潤滑ポート48aおよび48bである。本発明によるギア駆動アセンブリおよび可動ライナープレートについては、以下に詳述する。
【0015】
動作中に、モールドアセンブリ30は、コンクリートブロックマシンに選択的に連結される。しかし、説明を簡単にするために、図1にはコンクリートブロックマシンを図示していない。一実施態様では、モールドアセンブリ30は、駆動システムアセンブリ31の側方部材34aおよび34bをコンクリートブロックマシンにボルトで固定することによって、コンクリートブロックマシンに載置される。一実施態様では、モールドアセンブリ30は、実質的にモールドキャビティ46と同じ寸法であるヘッドシューアセンブリ52をさらに含む。ヘッドシューアセンブリ52は、コンクリートブロックマシンに選択的に連結するようにも構成されている。
【0016】
ライナープレート32a〜32dは、最初に、モールドボックス42の内部に向かって所望の距離伸長して、所望のモールドキャビティ46を形成する。次いで、パレット56が接触してモールドキャビティ46を形成するように、パレット56が配置される振動テーブルが(矢視58で示されるように)上昇する。一実施態様では、コアバーアセンブリ(図示せず)がモールドキャビティ46内に配置され、特定のブロックの設計要件に従って、完成ブロック内に空隙を作製する。
【0017】
次いで、可動供給ボックスドロワからモールドキャビティ46にコンクリートが充填される。次いで、ヘッドシューアセンブリ52が、(矢視54で示されるように)モールドキャビティ46上に降ろされ、コンクリートを油圧的または機械的に加圧する。次いで、ヘッドシューアセンブリ52は、振動テーブルとともにモールドアセンブリ30を同時に振動させ、モールドキャビティ46内のコンクリートに高い圧力をもたらす。高レベルの加圧によってモールドキャビティ46内のあらゆる空隙が充填され、コンクリートは、完成ブロックをモールドキャビティ46から即座に取り外すことができるような硬さのレベルに迅速に達する。
【0018】
完成ブロックは、第一の引き込みライナープレート32a〜32dによって取り外される。次いで、パレット56とともにヘッドシューアセンブリ52および振動テーブルが(矢印58とは反対の方向に)下げられ、一方で、ヘッドシューアセンブリ56がモールドキャビティ46からパレット52上へ完成ブロックを押すように、モールドアセンブリ30が固定状態を保つ。ヘッドシューアセンブリ52の下縁がモールドアセンブリ30の下縁よりも下になったときに、コンベアシステムは、完成ブロックを搬送するパレット56を離れる方向に移動させて、新しいパレットがその場所に配置される。上述のプロセスを繰り返して、更なるブロックを作製する。
【0019】
完成ブロックをモールドキャビティ46から取り外す前にライナープレート32a〜32bを引き込むことによって、ライナープレート32a〜32dの摩耗が少なくなるので、期待耐用年数が長くなる。さらに、可動ライナープレート32a〜32dによって、ヘッドシューアセンブリ52が完成コンクリートブロックの“化粧面”となるべき面と接触するように、従来の水平位置の代わりに、コンクリートブロックをパレット56に対して垂直な位置で成形することも可能となる。“化粧面”とは、壁または他の構造物に取付けた後に視界に晒される可能性がある、ブロックの表面のことである。
【0020】
図2は、可動ライナープレート32aおよび対応するギア駆動アセンブリ50のような、本発明による可動ライナープレートおよび対応するギア駆動アセンブリを示す斜視図70である。説明の便宜上、側方部材34aおよび横断部材36は図示していない。ギア駆動アセンブリ50は、ライナープレート32aに選択的に連結された第一のギア要素72と、第二のギア要素74と、ピストンロッド78を経て第二のギア要素74に連結された片ロッド端複動式空気圧シリンダ(シリンダ)76と、ギアトラック80とを含む。シリンダ76は、空気圧フィッティングを受けるための開口部82を含む。一実施態様では、シリンダ76は、油圧シリンダを備える。一実施態様では、シリンダ76は、両ロッド端複動式シリンダを備える。一実施態様では、ピストンロッド78は、第二のギア要素74に螺合される。
【0021】
図2の実施態様には、第一のギア要素72および第二のギア要素74が示されているが、以降、それぞれギアプレート72および第二のギアプレート74と称する。しかし、ギアプレートおよび円筒ギアヘッドとして示されているが、第一のギア要素72および第二のギア要素74は任意の好適な形状および寸法とすることができる。
【0022】
ギアプレート72は、第一の主要面84上に複数の傾斜チャネルを含み、ギアトラック80内を摺動するように構成される。ギアトラック80は、内壁40aから横断部材36aに延在するギアスロット(図示せず)に摺動可能に挿入される。円筒ギアヘッド74は、雌型ギアプレート72の第一の主要面84に隣接した面86上に複数の傾斜チャネルを含み、この傾斜チャネルは、円筒ギアヘッド74の半径の接線であり、ギアプレート72の傾斜チャネルを摺動可能に嵌合およびインターロックするように構成されている。ライナープレート32aは、後面90から延在するガイドポスト88a、88b、88cおよび88dを含む。ガイドポストのそれぞれは、内壁40aから横断部材36aに延在する対応するガイド穴(図示せず)に摺動可能に挿入されるように構成されている。ギアスロットおよびガイド穴は、以下に詳述する。
【0023】
シリンダ76がピストンロッド78を伸長させると、シリンダギア74が矢印92で示される方向に移動し、インターロック傾斜チャネルによって、ギアプレート72およびライナープレート32aを、矢印94で示されるように、モールド46の内部に向かって移動させる。図2に示されるように、図示のピストンロッド78および円筒ギアヘッド74は、伸長位置にあることに留意されたい。シリンダ76がピストンロッド78を引き込むと、シリンダギア74が矢印96で示される方向に移動し、ギアプレート72およびライナープレート32を、矢印98で示されるように、モールドの内部から離れるように移動させる。ライナープレート32aが、モールドの方へ、またはこれから離れるように移動すると、ゲートプレート72がガイドトラック80内を摺動し、ガイドポスト88a〜88dが対応するガイド穴内を摺動する。
【0024】
一実施態様では、着脱可能なライナー面100は、ライナープレート32aを通って延在する締結具102a、102b、102cおよび102dを経て、前面部44aに選択的に連結される。着脱可能なライナー100は、モールド46で作製されるブロックに、所望の形状を提供する、および/または所望の刷り込みパターンを提供するように構成されている。この点に関しては、着脱可能なライナー面100は、所望のネガティブの形状またはパターンを備える。一実施態様では、着脱可能なライナー面100は、ポリウレタン材料からなる。一実施態様では、着脱可能なライナー面100は、ゴム材料からなる。一実施態様では、着脱可能なライナープレートは、鋼またはアルミニウムのような金属または合金からなる。一実施態様では、ライナープレート32は、後面90上の凹部104内に載置された加熱器をさらに含むことが可能であり、この加熱器は、モールド46内でのコンクリートの硬化を補助して、前面部44aおよび着脱可能なライナー面100へのコンクリートの固着を低減する。
【0025】
図3Aは、図2において矢視106で示されるギア駆動アセンブリ50およびライナープレート32aの上面図120である。図中、側方部材34aおよび34b、および横断部材36aを破線で示す。ガイドポスト88cおよび88dは、内面40aから横断部材36aに伸長するガイド穴122cおよび122d内にそれぞれ摺動可能に挿入される。それぞれがガイドポスト88aおよび88bに対応するガイド穴122aおよび122bは図示していないが、ガイド穴122cおよび122dの下方に位置し、これらと一列に並ぶ。一実施態様では、ガイド穴ブッシュ124cおよび124dは、それぞれガイド穴122cおよび122dに挿入され、ガイドポスト88cおよび88dを摺動可能に受ける。ガイド穴ブッシュ124aおよび124bは図示していないが、ガイド穴ブッシュ124cおよび124dの下方に位置し、これらと一列に並ぶ。ギアトラック80は、ギアトラック80内を摺動するギアプレート72とともに、横断部材36aを通って延在するギアスロット126内に摺動可能に挿入されたものとして示される。ギアプレート72は、前面部44aからライナープレート32aを通って延在する複数の締結具128によって、ライナープレート32aに連結されたものとして示される。
【0026】
破線134で示される円筒ギアシャフトは、側方部材34aを通って横断部材36a内に延在し、ギアスロット126と少なくとも部分的に交差する。円筒ギアヘッド74、シリンダ76、およびピストンロッド78は、ギアプレート72の上に配置された円筒ギアヘッド74とともにギアシャフト134内に摺動可能に挿入される。破線130で示される円筒ギアヘッド74の傾斜チャネルは、132で示されるギアプレート72の傾斜チャネルとインターロックしている。
【0027】
図3Bは、図2において矢視108で示されるギア駆動アセンブリ50およびライナープレート32aの側面図140である。ライナープレート32aは、横断部材36aから少なくとも部分的に伸長したものとして示される。それに応じて、ガイドポスト88aおよび88dは、それぞれガイド穴ブッシュ124aおよび124dから部分的に伸長したものとして示される。一実施態様では、一対の制限リング142aおよび142dは、それぞれガイドポスト88aおよび88に選択的に連結され、ライナープレート32aが、横断部材36aからモールドキャビティ46の内部に向かって伸長させることができる伸長距離を制限する。ガイドポスト88bおよび88cにそれぞれ対応する制限リング142bおよび142cは図示していないが、制限リング142aおよび142dの後ろに位置し、これらと一列に並ぶ。図示した実施態様では、制限リングは、ガイドポストの実質的に端部にあるものとして示され、したがって、横断部材36aからの可能な実質的最大伸長距離である。しかし、制限リングは、ガイドポストに沿った他の位置に配置することができ、それによって可能な伸長距離を調整する。
【0028】
図4Aおよび図4Bは、それぞれモールドアセンブリ30の上面図150および160である。図4Aは、引き込み位置にあるライナープレート32a、32b、32cおよび32dを示す図である。ライナー面152、154および154は、それぞれライナープレート32b、32cおよび32dに対応する。図4Bは、伸長位置にある対応するライナー面100、152、154および156とともに、ライナープレート32a、32b、32cおよび32dを示す図である。
【0029】
図5Aは、ギアプレート72の上面図170である。ギアプレート72は、ギアプレート72の上面174に延びる複数の傾斜チャネル172を含む。傾斜チャネル172は、表面として上面174を有する、対応する複数の線状の“歯”176を形成する。各傾斜チャネル172および各歯176は、それぞれ幅178および180を有する。傾斜チャネルは、ギアプレート72全体に、186で示される角度0°からの角度(θ)182で延びている。
【0030】
図5Bは、図5Aにおいて矢視184で示されるギアプレート72の端面図(“A”)185であり、複数の傾斜チャネル172および線状歯176をさらに示す図である。各傾斜チャネル172は、深さ192を有する。
【0031】
図5Cは、円筒ギアヘッド76の平坦面202の図200を示す図である。円筒ギアヘッド76は、表面202に延びる複数の傾斜チャネル204を含む。傾斜チャネル204は、対応する複数の線状歯206を形成する。傾斜チャネル204および線状歯206は、線状歯206の幅が傾斜チャネル172の幅と実質的に一致し、傾斜チャネル204の幅が線状歯176の幅と実質的に一致するように、それぞれ幅180および178を有する。傾斜チャネル204および歯206は、表面202全体に、186で示される角度0°からの角度(θ)182で延びている。
【0032】
図5Dは、図5Cにおいて矢視208で示される円筒ギアヘッド76のうちの端面図210であり、複数の傾斜チャネル204および線状歯206をさらに示す図である。表面202は、円筒ギアヘッド76の半径の接線の平坦面である。各傾斜チャネルは、平坦面202から深さ192を有する。
【0033】
円筒ギアヘッド76が“回転して”ギアプレート72の表面174上に配置されるとき、ギアヘッド76の線状歯206は、ギアプレート72の傾斜チャネル172と嵌合して、これをインターロックし、ギアプレート72の線状歯176は、ギアヘッド76の傾斜チャネル204と嵌合して、これをインターロックする(図2も参照のこと)。ギアヘッド76が方向92に押されるとき、ギアヘッド76の線状歯206は、ギアプレート72の線状歯176を押して、ギアプレート72を方向94に移動させる。逆に、ギアヘッド76が方向96に押されるとき、ギアヘッド76の線状歯206は、ギアプレート72の線状歯176を押して、ギアプレート72を方向98に移動させる。
【0034】
円筒ギアヘッド76がギアプレート72を方向94および98に押すためには、角度(θ)182を0°より大きく、90°より小さくなければならない。しかし、θ182は、少なくとも45°を超えることが好ましい。θ182が45°以下であると、モールド46内のコンクリートが加圧されるときのように、方向92に移動する円筒ギアヘッド74がギアプレート72を方向94に押すために必要な力が、ギアプレート72が方向98に押されて円筒ギアヘッド74を方向96に押すために必要な力よりも大きくなる。θ182が45°を超えて大きくなると、円筒ギアヘッド74を方向96に移動させるために、ギアプレート72に方向98に加える必要のある力がより大きくなる。実際に、90°で、ギアプレート72は、どれだけ多くの力を方向98においてギアプレート72に加えたとしても、円筒ギアヘッド74を方向92または96のいずれにも移動させることができなくなる。実質的に、角度(θ)は、ピストンロッド78を経てシリンダ76によって円筒ギアヘッド74に加えられる力の増幅器として作用する。θ182が45°を超えると、円筒ギアヘッド74を方向96に移動させるために、ギアプレート72に方向98に加える必要のある力の大きさが、ギアプレート72を適所に“保持する”ために(すなわち、モールド46内でコンクリートが加圧されているとき)、ピストンロッド78を経て円筒ギアヘッド74に方向92に加える必要のある力よりも大きくなる。
【0035】
しかし、θ182が45°を超えて大きくなると、円筒ギアヘッド74が方向92に押されるときに、ギアプレート72および対応するライナープレート32aが方向94に移動する距離がより短くなる。θ182の好適な動作角度は、ほぼ70°である。この角度は、ギアプレート72の移動長さと、ギアヘッド74を方向96に押すために、ギアプレート72に方向98に加える必要のある力の増加分との間の妥協点である。ギアプレート72および円筒ギアヘッド74、ならびにそれらの対応する傾斜チャネル176および206は、コンクリートがモールドキャビティ46内で加圧されているときに、ライナープレート32aの位置を保持するために必要なシリンダ76の必要なpsiレーティングを低減し、またシリンダ76によって受ける摩耗も低減する。加えて、上述の説明から、ライナープレート32aの移動距離を制御するための1つの方法は、それぞれがギアプレート72および円筒ギアヘッド74に対応する、傾斜チャネル176および206の角度(θ)182を制御するものであることは明らかである。
【0036】
図6Aは、ギアトラック80の上面図220である。ギアトラック80は、上面220と、第一の端面224と、第二の端面226とを有する。第1の開口部230および第2の開口部232を有する長方形のギアチャネル(破線228で示す)は、ギアトラック80を通って延在する。円弧状チャネル234は、円筒ギアヘッド76の収容に必要な半径を有し、上面220を横断して伸長し、上面222を通ってギアチャネル228内に延在するギアウィンドウ236を形成する。ギアトラック80の幅238は、側方部材36a内のギア開口部126の幅よりも段階的に狭くなる(図3Aも参照のこと)。
【0037】
図6Bは、図6Aにおいて矢視240で示されるギアトラック80の端面図250であり、ギアチャネル228および円弧状チャネル234をさらに示す図である。ギアトラック80は、側方部材36a内のギア開口部126の高さよりも段階的に低くなる深さ252を有する(図3Aを参照のこと)。図6Bは、図6Aにおいて矢視242で示されるギアトラック80の側面図260である。
【0038】
図7は、ギアトラック80とギアプレート72との関係を示す上面図270である。ギアプレート72は、ギアプレート72を第一の開口部230を経てギアチャネル228内に摺動可能に挿入できるように、ギアトラック80の幅274よりも段階的に狭くなる幅272を有する。ギアプレート72がギアトラック80内に挿入されるとき、傾斜チャネル172および線状歯176はギアウィンドウ236を経て露出される。
【0039】
図8Aは、ギアプレート72と、円筒ギアヘッド74と、ギアトラック80との関係を示す上面図280である。ギアプレート72は、ガイドトラック80に摺動可能に挿入されたものとして示される。円筒ギアヘッド74は、円弧状チャネル234内に配置されたものとして示され、円筒ギアヘッド74の傾斜チャネルおよび線状歯は、ギアプレート72の傾斜チャネル172および線状歯176と摺動可能に嵌合され、これらとインターロックされる。ピストンロッド78を伸長することによって円筒ギアヘッド74が方向92に移動されるとき、ギアプレート72は、ギアトラック80から外側の方向94に伸長する(下記、図9Bも参照のこと)。ピストンロッド78を引き込むことによって円筒ギアヘッド74が方向96に移動されるとき、ギアプレート72は、ギアトラック80への方向98に引き込む(下記、図9Aも参照のこと)。
【0040】
図8Bは、図8Aにおいて矢視282によって示されるギアプレート72、円筒ギアヘッド74、およびガイドトラック80の側面図290である。円筒ギアヘッド74は、表面202が円弧状チャネル234内に位置するように配置される。円筒ギアヘッド74の傾斜チャネル204および歯206は、ギアウィンドウ236を通って延在し、ギアチャネル228内に位置するギアプレート72の傾斜チャネル172および線状歯176をインターロックする。図8Cは、図8Aにおいて矢視284で示される端面図300であり、ギアプレート72と、円筒ギアヘッド74と、ガイドトラック80との関係をさらに示す図である。
【0041】
図9Aは、ギアトラック80内に完全に引き込んだ位置にあるギアプレート72を示す上面図310であり、ライナープレート32aは、横断部材36aに対して引き込まれている。明確にするため、円筒ギアヘッド74は図示していない。傾斜チャネル172および線状歯176は、ギアウィンドウ236を介して認識できる。ライナープレート32aは、ライナープレート32aを通ってギアプレート72内に延在する複数の締結具128によってギアプレート72に連結されたものとして示される。一実施態様では、締結具128は、ライナープレート32aをギアプレート72に螺合する。
【0042】
図9Bは、少なくとも部分的にギアトラック80から伸長させたギアプレート72を示す上面図320であり、ライナープレート32aは、横断部材36aから分離されている。また、円筒ギアヘッド74は図示されず、傾斜チャネル172および線状歯176はギアウィンドウ236を介して認識できる。
【0043】
図10Aは、本発明によるギア駆動アセンブリ332の1つの例示的な実施態様を示す図330である。ギア駆動アセンブリ332は、円筒ギアヘッド74と、シリンダ76と、ピストンロッド78と、円筒状のスリーブ334とを含む。円筒ギアヘッド74およびピストンロッド78は、円筒スリーブ334内に摺動可能に挿入するように構成される。シリンダ76は、封止を行うOリング336とともに円筒スリーブ334に螺合される。円筒スリーブ334の軸に沿ったウィンドウ338は、傾斜チャネル204および線状歯206を部分的に露出させる。空気または油圧フィッティングのようなフィッティング342は、開口部82に螺合されたものとして示される。シリンダ76は、横断部材36aを介して利用できる開口部344をさらに含む。
【0044】
ギア駆動アセンブリ332は、ウィンドウ338がギアスロット126と交差して、傾斜チャネル204および線状歯206がギアスロット126内に露出するように、円筒ギアシャフト134(破線で示す)内に摺動可能に挿入するように構成される。ギアトラック80およびギアプレート72(図示せず)は、ギア駆動アセンブリ332が円筒ギアシャフト134内に摺動可能に挿入されたときに、円筒ギアヘッド74の傾斜チャネル204および線状歯206が、ギアプレート72の傾斜チャネル172および線状歯176と摺動可能に嵌合して、これらをインターロックするように、最初にギアスロット126内に摺動可能に挿入される。
【0045】
一実施態様では、キー340は、円筒ギアヘッド74に連結され、円筒スリーブ334内のキースロット342に架かる。キー340は、円筒ギアヘッド74円筒スリーブ334内で回転しないようにする。キー340およびキースロット342は互いに、円筒スリーブ334内の円筒ギアヘッド74の最大伸長および引き込みも制御する。したがって、一実施態様では、キー340を調整して、モールドキャビティ46の内部に向かうライナープレート32aの伸長距離を制御することができる。図10Aは、図10Bに示されるように、円筒シャフト334の上面図350であり、キー340およびキースロット342をさらに示す図である。
【0046】
図11Aは、2つのコンクリートブロックを形成するための本発明のモールドアセンブリ360の1つの例示的な実施態様を示す上面図である。モールドアセンブリ360は、一対のモールドボックス42aおよび42bを形成するように、互いに連結した、側方部材34aおよび34bと、横断部材36a〜36cとを有するモールドフレーム361を含む。モールドボックス42aは、モールドキャビティ46aを形成するように構成された、可動ライナープレート32a〜32dと、対応する着脱可能なライナー面33a〜33dとを含む。モールドボックス42bは、モールドキャビティ46bを形成するように構成された、可動ライナープレート32e〜32hと、対応する着脱可能なライナー面33e〜33hとを含む。
【0047】
各可動ライナープレートは、50a〜50hで示される隣接したモールドフレーム部材に対して内部的に位置する、関連するギア駆動アセンブリを有する。各可動ライナープレートは、72a〜72hで示される対応するギアプレートとともに、伸長位置が示される。下述するように、可動ライナープレート32cおよび32eは、ギア駆動アセンブリ50c/eを、上を向いた対応する複数の傾斜チャネルを有するギアプレート72e、および下を向いた対応する複数の傾斜チャネルを有するギアプレート72cと共有する。
【0048】
図11Bは、ギア駆動アセンブリ50c/eのような本発明によるギア駆動アセンブリを示す図である。図11Bは、図11Aの横断部材36cを断面A−Aの方向から見たギア駆動アセンブリ50c/eの図である。ギア駆動アセンブリ50c/eは、対向する表面上に傾斜チャネル204cおよび204eを有する単一の円筒ギアヘッド76c/eを含む。円筒ギアヘッド76c/eは、傾斜チャネル204cおよび204eが、ギアプレート72cおよび72eの傾斜チャネル172cおよび172eをそれぞれ摺動可能にインターロックするように、ギアトラック80cおよび80dの円弧状チャネル234cおよび234eに嵌合する。
【0049】
傾斜チャネル172cと204c、および172eと204eは互いに対向し、円筒ギアヘッド76c/eが(例えば、図11Bから外へ)伸長されたときに、ギアプレート72cがモールドキャビティ46aの内部に向かう方向372に移動し、ギアプレート72eがモールドキャビティ46bの内部に向かう方向374に移動するように構成される。同様に、円筒ギアヘッド76c/eが(例えば、図11Bの方に)引き込まれたときに、ギアプレート72cがモールドキャビティ46aの内部から離れる方向376に移動し、ギアプレート72eがモールドキャビティ378の内部から離れる方向378に移動する。
また、円筒ギアヘッド76c/eおよびギアプレート72cおよび72cは、任意の好適な形状とすることが可能である。
【0050】
図12は、本発明によるモールドアセンブリ430の1つの例示的な実施態様の一部を示す斜視図である。モールドアセンブリは、複数のコンクリートブロックを同時に成形するための可動ライナープレート432a〜432lを含む。モールドアセンブリ430は、側方部材434aおよび434b、ならびに横断部材436aおよび436bを有する駆動システムアセンブリ431を含む。説明の便宜上、側方部材434aを破線で示す。モールドアセンブリ430は、分割プレート437a〜437gをさらに含む。
【0051】
可動ライナープレート432a〜432l、および分割プレート437a〜437gは、モールドキャビティ446a〜446fを形成し、各モールドキャビティは、コンクリートブロックを形成するように構成される。したがって、図示した実施態様では、モールドアセンブリ430は、6つのブロックを同時に形成するように構成される。しかし、モールドアセンブリ430を、6つ以外の多数のコンクリートブロックを同時に形成するように容易に修正できることは明らかである。
【0052】
図示した実施態様では、側方部材434aおよび434bは、可動ライナープレート432a〜432f、および432g〜432lをそれぞれ移動させるための、対応するギア駆動アセンブリをそれぞれ有する。説明の便宜上、側方部材434aおよび対応する可動ライナープレート432a〜432gに関連するギア駆動アセンブリ450のみを示す。ギア駆動アセンブリ450は、対応する可動ライナープレート432a〜432fにそれぞれ選択的に連結された第一のギア要素472a〜472fと、第二のギア要素474とを含む。図示した実施態様では、第一のギア要素472a〜472fおよび第二のギア要素474は、円筒形状のものとして示される。しかし、任意の好適な形状を用いることができる。
【0053】
第二のギア要素474は、ピストンロッド478を経てシリンダピストン(図示せず)に選択的に連結される。以下に詳述する一実施態様(図12を参照のこと)では、第二のギア要素474は、単一の構成要素を形成するように、シリンダピストンと一体である。
【0054】
図示した実施態様では、第一のギア要素472a〜472bのそれぞれは、第二のギア要素474上の複数の実質的に並列する傾斜チャネル486を摺動可能に嵌合して、これをインターロックする、複数の実質的に並列する傾斜チャネル484をさらに含む。第二のギア要素474が矢印492で示される方向に移動するとき、可動ライナープレート432a〜432fのそれぞれは、矢印494で示される方向に移動する。同様に、第二のギア要素474が矢印496で示される方向に移動するとき、可動ライナープレート432a〜432fのそれぞれは、矢印498で示される方向に移動する。
【0055】
図示した実施態様では、第一のギア要素432a〜432fそれぞれの上の傾斜チャネル484と、傾斜チャネル486は、同じ角度である。したがって、第二のギア要素474が方向492および496に移動するとき、可動ライナープレート432a〜432fのそれぞれは、方向494および498に同じ距離移動する。一実施態様では、第二のギア要素474は、各群が第一のギア要素472a〜472fのうちの異なる1つに対応する、複数群の実質的に並列する傾斜チャネルを含む。一実施態様では、第二のギア要素474の方向492および496へのそれぞれの移動に応じて、可動ライナープレート432a〜432fのそれぞれが、方向494および498に異なる距離移動するように、各群の傾斜チャネルおよび対応する第一のギア要素が異なる角度を有する。
【0056】
図13は、本発明によるギア駆動アセンブリ500、および対応する可動ライナープレート502および着脱可能なライナー面504を示す斜視図である。説明の便宜上、側方部材および横断部材を含むフレームアセンブリは図示していない。ギア駆動アセンブリ500は、シリンダ本体507を有する両ロッド端複動式空気圧シリンダピストン506と、第一のロッド端510および第二のロッド端512を備えた中空ピストンロッド508とを含む。ギア駆動アセンブリ500は、それぞれが可動ライナープレート502に選択的に連結された一対の第一のギア要素514aおよび514bをさらに含み、第一のギア要素514aおよび514bのそれぞれは、複数の実質的に並列する傾斜チャネル516aおよび516bを有する。
【0057】
図示した実施態様では、シリンダピストン506のシリンダ本体507は、傾斜チャネル516aおよび516bと嵌合して、これらをインターロックするように構成された複数の実質的に並列する傾斜チャネル518を含む。一実施態様では、シリンダ本体507は、傾斜チャネル518を有するシリンダスリーブに摺動可能に挿入し、これに連結するように構成される。
【0058】
一実施態様では、シリンダピストン506およびピストンロッド508は、横断部材36aの駆動シャフト134のようなフレーム部材の駆動シャフト内に位置し、側方部材34bのようなフレーム部材に連結され、これを通って延在するロッド端510と、側方部材34aのようなフレーム部材に連結され、これを通って延在するロッド端512とを備える。第一のロッド端510および第二のロッド端512は、圧縮空気を受け取り、これを供給して複動式シリンダピストン506を駆動する。第一および第二のロッド端510および512を経て側方部材34aおよび34bに固定されるピストンロッド508によって、シリンダピストン506は、第一および第二のロッド端510および512を経て受け取った圧縮空気に応じて、矢印520および522で示される方向にピストンロッド508の軸に沿って移動する。
【0059】
圧縮空気が第二のロッド端512を経て受け取られ、第一のロッド端510を経て排出されるとき、シリンダピストン506が駆動シャフト134のような駆動シャフト内を522の方向に移動して、第一のギア要素514aおよび516bと、対応するライナープレート502と、ライナー面504とを矢印524の方向に移動させる。これとは逆に、圧縮空気が第一のロッド端510を経て受け取られ、第二のロッド端512を経て排出されるとき、シリンダピストン506が駆動シャフト134のような駆動シャフト内を520の方向に移動して、第一のギア要素514aおよび516bと、対応するライナープレート502と、ライナー面504とを矢印526の方向に移動させる。
【0060】
図示した実施態様では、シリンダピストン506、第一のギア要素514aおよび514bは、実質的に円筒形状のものとして示される。しかし、任意の好適な形状を用いることができる。さらにまた、図示した実施態様では、シリンダピストン506は、両ロッド端複動式シリンダである。一実施態様では、シリンダピストン506は、側方部材34bのようなフレーム部材に連結された片ロッド端510のみを有する、片ロッド端複動式シリンダである。当該の一実施態様では、圧縮空気は、片ロッド端510およびギアシャフト134を経て側方部材34aを介してシリンダピストン506に作製された柔軟な空気接続を経て、シリンダピストンに提供される。加えて、シリンダピストン506は、油圧シリンダを備える。
【0061】
図14は、本発明の一実施態様による駆動アセンブリ550を有する(図12に示されるような)モールドアセンブリ430の一部の上面図である。駆動アセンブリ550は、開口部433のような側方部材434a内の開口部を経て、対応するライナープレート432a〜432fに選択的に連結された第一の駆動要素572a〜572fを含む。第一の駆動要素572a〜572fのそれぞれは、マスターバー573にさらに連結される。駆動アセンブリ550は、複動式シリンダ607を有する両ロッド端油圧ピストンアセンブリ606と、第一のロッド端610および第二のロッド端612を有する中空ピストンロッド608とをさらに含む。第一および第二のロッド端610および612は固定されており、側方部材434aに連結されて駆動アセンブリ550を収容する着脱可能な筐体560を通って延在する。第一および第二のロッド端610および612は、ライン622aおよび622bを経て外部油圧システム624に連結し、中空ピストンロッド608を経て複動式シリンダ607と作動油を送受するように構成された、油圧フィッティング620にそれぞれ接続される。
【0062】
一実施態様では、図示さるように、第一の駆動要素572bおよび572eは、第二の駆動要素を形成する複数の実質的に並列する傾斜チャネル618を摺動可能にインターロックする、複数の実質的に並列する傾斜チャネル616を含む。一実施態様では、図12に示されるように、傾斜チャネル618は、複動式シリンダ607が第二の駆動要素を形成するように、油圧ピストンアセンブリ606の複動式シリンダ607上に形成される。他の実施態様では、図15A〜15Cで後述するように、第二の駆動要素は、複動式シリンダ607から分離され、これに操作可能に連結される。
【0063】
第二のロッド端612からフィッティング620を経て複動式シリンダ607および中空ピストンロッド608に作動油が送られるとき、作動油は、第一のロッド端610から排出され、複動式シリンダ607および傾斜チャネル618を第二のロッド端612に向かってピストンロッド608に沿って移動させる。複動式シリンダ607が第二のロッド端612の方へ移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、第一の駆動要素572bおよび572e、および対応するライナープレート432bおよび432eを、それぞれモールドキャビティ446bおよび446eの内部に向かって駆動する。さらに、第一の駆動要素572a〜572fのそれぞれが、マスターバー573に連結されているので、第一の駆動要素572bおよび572eのモールドキャビティ446および446eを内部へ向かって駆動することによって、第一の駆動要素572a、572c、572dおよび572f、および対応するライナープレート432a、432c、432dおよび432eも、モールドキャビティ446a、446c、446dおよび446fの内部に向かってそれぞれ移動する。これとは逆に、第一のロッド端610からフィッティング620を経て複動式シリンダ607および中空ピストンロッド608に作動油が送られると、複動式シリンダ607は第一のロッド端610に向かって移動し、ライナープレート432は対応するモールドキャビティ446の内部から離れるように移動する。
【0064】
一実施態様では、駆動アセンブリ550は、サポートシャフト626aおよび626bのようなサポートシャフト626をさらに含み、これらは着脱可能な筐体560と側方部材434aとの間に連結され、マスターバー573を通って延在する。複動式シリンダ607が第一および第二のロッド端610および612から作動油を送る/排出するとき、マスターバー573は、サポートシャフト626に沿って前後に移動する。サポートシャフト626aおよび626bは、モールドアセンブリ430の固定要素に連結されているので、これらのシャフトは、モールドキャビティ446に向かって、およびこれから離れるように移動するとき、ライナープレート432、駆動要素572、およびマスターバー573をサポートし、剛性を提供する。
【0065】
一実施態様では、駆動アセンブリ550は、ライン630を経て外部圧縮空気システム632に連結し、圧縮空気を筐体560に供給するように構成された、空気フィッティング628をさらに含む。着脱可能な筐体560が空気フィッティング628を経て圧縮空気を受け取ることによって、駆動要素572が側方部材434aを通って延在する開口部433のようなあらゆる非密封開口部を通って、空気が筐体560の外部に連続的に“押し出される”ように、筐体560の内部空気圧が外部空気圧に対して正になる。正の空気圧を保持し、当該の非密封開口部を通じて空気を押し出すことによって、筐体560からの塵埃、細片、他の不要な混入物侵入の発生、および駆動アセンブリ550の汚染が低減される。
【0066】
第一および第二のロッド端部610および612は、ライン622aおよび622bを経て外部油圧システム624に連結し、中空ピストンロッド608を経て複動式シリンダ607と作動油を送受するように構成された、油圧フィッティング620にそれぞれ接続される。
【0067】
図15Aは、本発明による駆動アセンブリ550の一実施態様の一部を示す上面図である。駆動アセンブリ550は、着脱可能な筐体560に連結され、これを通って延在する第一および第二のロッド端610および612を備えた複動式シリンダ607と、中空ピストンロッド608とを備えた両ロッド端油圧ピストンアセンブリ606を含む。
【0068】
図示されるように、複動式シリンダ607は、第二のギア要素640内の機械加工開口部641に摺動可能に嵌合され、中空ピストンロッド608は、着脱可能なエンドキャップ642を通って延在する。一実施態様では、エンドキャップ646は、複動式シリンダ607が第二の駆動要素640に対して固定されたままになるように、エンドキャップ646が複動式シリンダ607に密着して固定するように、機械加工開口部641内に螺入される。第二の駆動要素640は、複動式シリンダ607の一体部分である傾斜チャネルの代わりに、複数の実質的に並列する傾斜チャネル618を含む。図14を参照する。第二のギア要素640の傾斜チャネル618は、第一のギア要素572bおよび572eの傾斜チャネル616をインターロックするように構成される。
【0069】
第二のギア要素640は、筐体560に載置された線状軸受ブロック646に摺動可能に連結されたガイドレール644をさらに含む。図14に関して上述したように、第一および第二のロッド端610および612を経て作動油を複動式シリンダ607と送受することによって、複動式シリンダ607がピストンロッド608に沿って移動する。複動式シリンダ607が、エンドキャップ642によって第二のギア要素640の機械加工シャフト641内の適所に“ロック”されると、第二のギア要素640は、複動式シリンダ607とともに中空ピストンロッド608に沿って移動する。第二の駆動要素640が中空ピストンロッド608に沿って移動するとき、線状軸受ブロック646は、ガイドレール644をガイドおよび固定し、それによって、第二の駆動要素640をガイドおよび固定し、また中空ピストンロッド608に垂直な第二の駆動要素640の不要な動きを低減する。
【0070】
図15Bは、図15Aによって示される駆動アセンブリ550の一部を断面A−Aから見た横方向断面図である。ガイドレール644は、第二の駆動要素640が複動式シリンダ607によってピストンロッド608に沿って移動されるとき、線状軸受トラック650に摺動可能に嵌合され、軸受652に架かる。一実施態様では、線状軸受ブロック646bは、ボルト648を介して筐体560に連結される。
【0071】
図15Cは、図15Aの駆動アセンブリ550の一部を断面B−Bから見た長手方向断面図であり、複動式シリンダ607は、エンドキャップ642aおよび642bによって駆動要素640のシャフト641内に固定されたものとして示される。一実施態様では、エンドキャップ642aおよび642bは、複動式シリンダ607の各端部に密着するように、第二の駆動要素640の端部に螺入される。中空ピストンロッド608は、エンドキャップ642aおよび642bを通って延在し、筐体560に連結され、これを通って延在する第一および第二のロッド端部610および612を有する。分割器654は、ピストンロッド608に連結され、複動式シリンダ607を第一のチャンバ656および第二のチャンバ658に分割する。第一のポート660および第二のポート662によって、作動油は、第一および第二のロッド端610および612、および関連する油圧フィッティング620をそれぞれ経て、第一のチャンバ656および第二のチャンバ658に給送および排出される。
【0072】
作動油が第一のロッド端610および第一のポート660を経て第一のチャンバ656に給送されるとき、複動式シリンダは607は、第一のロッド端610に向かって中空ピストンロッド608に沿って移動し、作動油は、第二のポート662および第二のロッド端612を経て第二のチャンバ658から排出される。複動式シリンダ607がエンドキャップ642aおよび642bによってシャフト641内に固定されるので、第二の駆動要素640、従って、傾斜チャネル618は第一のロッド端610に向かって移動する。同様に、作動油が第二のロッド端612および第二のポート662を経て第二のチャンバ658に給送されるとき、複動式シリンダは607は、第二のロッド端612に向かって中空ピストンロッド608に沿って移動し、作動油は、第一のポート660および第一のロッド端610を経て第一のチャンバ656から排出される。
【0073】
図16は、図14に示されるように、駆動アセンブリ550の一部の側面図であり、ライナープレート432aのような代表的なライナープレートと、対応する着脱可能なライナー面400とを示す。ライナープレート432aは、ボルト締め連結670を経て第二の駆動要素572aに連結され、また、駆動要素572aは、ボルト締め連結672を経てマスターバー573に連結される。ライナー面400の下部は、ボルト締め連結674を経てライナープレート432aに連結される。一実施態様では、図示されるように、ライナープレート432aは、ライナープレート432aの上縁の長さに沿って延びる隆起した“リブ”676を含む。ライナー面400内のチャネル678は、隆起したリブ676と重なり、これをインターロックして、ライナープレート432aとライナー面400との間に“ボルトレス”接続を形成する。当該のインターロック接続は、ライナー面400の領域においてライナー面400の上部をライナープレート432に確実に連結するが、そうでなければ、ライナー面400とライナープレート432aとの間が狭すぎるので、モールドキャビティ446aに面するライナー面400の表面上に認識されるボルトでなければ、これらの間にボルト締め連結を使用できなくなる場合がある。
【0074】
一実施態様では、ライナープレート432は、対応するライナー面400の温度を所望の温度に保持して、硬化プロセス中に、対応するモールドキャビティ446内のコンクリートがライナー面400の表面に固着しないように構成された、加熱器680を含む。一実施態様では、加熱器680は、電気加熱器を備える。
【0075】
図17は、図14のモールドアセンブリ430のような、本発明によるモールドアセンブリの一実施態様を示すブロック図であり、ライナープレート432のような可動ライナープレートの動作を、駆動アセンブリ550のような駆動アセンブリの動作を制御することによって、コンクリートブロックマシン702の動作と同調させるように構成された、制御器700をさらに含む。一実施態様では、図示されるように、制御器700は、プログラマブル論理制御器(Programmable Logic Controller:PLC)を備える。
【0076】
図1に関して上述したように、モールドアセンブリ430は、一般的に複数のボルト締め連結を経て、コンクリートブロックマシン702に選択的に連結される。動作中に、コンクリートブロックマシン702は、最初にモールドボックスアセンブリ430の下にパレット56を配置する。次いで、コンクリート供給ボックス704は、アセンブリ430のモールドキャビティ446のようなモールドキャビティにコンクリートを充填する。次いで、ヘッドシューアセンブリ52がモールドアセンブリ430上に降ろされ、モールドキャビティ446内のコンクリートを油圧的または機械的に加圧し、パレット56が配置された振動テーブルとともに、モールドアセンブリ430を同時に振動させる。加圧および振動の完了後に、形成されたコンクリートブロックがモールドキャビティ446からパレット56上に排出されるように、ヘッドシューアセンブリ52およびパレット56がモールドキャビティ446に対して下げられる。次いで、ヘッドシューアセンブリ52を上昇させて、新しいパレット56をモールドキャビティ446の下の所定位置に移動させる。上述のプロセスは、連続的に繰り返され、当該の繰り返しは、一般的にサイクルと称される。特にモールドアセンブリ430に関しては、当該の各サイクルで6つのコンクリートブロックを生成する。
【0077】
PLC700は、上述のようなコンクリートブロックマシン702の動作に関して、ライナープレート432のモールドキャビティ446への伸長および引き込みを同調させるように構成される。サイクルの開始時に、ライナープレート432は、モールドキャビティ446から完全に引き込まれる。一実施態様では、図14を参照して、駆動アセンブリ550は、近接スイッチ706aおよび706bのような一対のセンサーを含み、マスターバー573の位置を監視し、マスターバー573に連結された可動ライナープレート432の位置を監視する。図14に示されるように、近接スイッチ706aおよび706bは、ライナープレート432がモールドキャビティ446に対して、伸長位置および引き込み位置にあるときを検出するようにそれぞれ構成される。
【0078】
一実施態様では、パレット56がモールドアセンブリ430の下に配置された後に、PLC700は、コンクリート供給ボックス704がコンクリートをモールドキャビティ446に供給する準備ができたことを示す信号708を、コンクリートブロックマシン702から受信する。PLC700は、近接スイッチ706aおよび706bからそれぞれ受信した信号710aおよび710bに基づいて、可動ライナープレート432の位置を確認する。引き込み位置にあるライナープレート432については、PLC700は、ライナー伸長信号712を油圧システム624に送信する。
【0079】
ライナー伸長信号712に応じて、油圧システム624は、ピストンアセンブリ606の第二のロッド端612への作動油の給送を経路622bを経て開始し、また、第一のロッド端610からの作動油の受け取りを経路622aを経て開始する。それによって、複動式シリンダ607は、ライナープレート432をモールドキャビティ446内部に向かって移動させ始める。近接スイッチ706aがマスターバー573を検出したときに、近接スイッチ706aは、ライナープレート432が所望の伸長位置に到達したことを示す信号710aをPLC700に送信する。信号710aに応じて、PLC700は、油圧システム624に、ピストンアセンブリ606への作動油の給送を停止するように信号712を経て命令し、ライナープレート432が伸長されたことを示す信号714をコンクリートブロックマシン702に送信する。
【0080】
信号714に応じて、コンクリート供給ボックス704は、モールドキャビティ446にコンクリートを充填し、ヘッドシューアセンブリ52がモールドアセンブリ430上に降ろされる。コンクリートの加圧および振動の完了後に、コンクリートブロックマシン702は、形成されたコンクリートブロックをモールドキャビティ446から排出する準備ができたことを示す信号716を送信する。信号716に応じて、PLC700は、ライナー引き込み信号718を油圧システム624に送信する。
【0081】
ライナー引き込み信号718に応じて、油圧システム624は、経路622aを経た作動油の、経路622を経た第一のロッド端610への給送を開始し、また、第二のロッド端612からの作動油の受け取りを経路622bを経て開始する。それによって、複動式シリンダ607は、ライナープレート432をモールドキャビティ446の内部から離れるように移動させ始める。近接スイッチ706bがマスターバー573を検出したとき、近接スイッチ706bは、ライナープレート432が所望の引き込み位置に到達したことを示す信号710bをPLC700に送信する。信号710bに応じて、PLC700は、油圧システム624に、ピストンアセンブリ606への作動油の給送を停止するように信号718を経て命令し、ライナープレート432が引き込まれたことを示す信号720をコンクリートブロックマシン702に送信する。
【0082】
信号720に応じて、ヘッドシューアセンブリ52およびパレット56は、形成されたコンクリートブロックをモールドキャビティ446から排出する。コンクリートブロックマシン702は、次いで、ヘッドシューアセンブリ52を引き込んで、新しいパレット56をモールドアセンブリ430の下に配置する。次いで、上述のプロセスが次のサイクルに対して繰り返される。
【0083】
一実施態様では、PLC700は、モールドアセンブリ430への圧縮空気の供給を制御するようにさらに構成される。一実施態様では、PLC700は、コンクリートブロックマシン702およびモールドアセンブリ430が動作して、コンクリートブロックを形成したときを示すステータス信号722を圧縮空気システム630に送信する。動作中に、圧縮空気システム632は、ライン630および空気フィッティング628を経て、圧縮空気をモールドアセンブリ420の筐体560に供給して、ほこり/塵埃および他の細片が駆動アセンブリ550に侵入する可能性を低減する。動作中でないときは、圧縮空気システム632は、モールドアセンブリ430に圧縮空気を供給しない。
【0084】
制御器700の上述の説明は、駆動アセンブリ500のピストンアセンブリ606のような単一のピストンアセンブリだけを用いた駆動アセンブリの制御に関するものであるが、制御器700は、複数のピストンアセンブリを用い、また、近接スイッチ706aおよび706bのような複数対の近接スイッチを用いた駆動アセンブリを制御するように構成することができる。そのような場合、油圧システム624は、ライン622aおよび622bのような一対の油圧ラインを経て各ピストンアセンブリに連結されることになる。加えて、PLC700は、複数の位置信号を受信して、全ての可能なライナープレートが拡張位置にあることを各適用可能な近接スイッチが示したとき、および全ての可能なライナープレートが引き込み位置にあることを各適用可能な近接スイッチが示したときにのみ、それぞれの信号によって、モールドキャビティにコンクリートを充填し、ブロックを形成して排出することができる。
【0085】
図18A〜18Cは、図15A〜15Cに示されるような、駆動アセンブリ550の別の実施態様の一部を示す図である。図18Aは、第二のギア要素640の上面図であり、第二のギア要素640は、ピストンアセンブリ606のようなピストンアセンブリの代わりに、ねじ駆動システム806によって駆動される。ねじ駆動システム806は、アクメ型またはボール型ねじのようなねじ808と、電気モーター810とを含む。ねじ808は、第二のギア要素640を介して長手方向に伸長する対応するねじ付きシャフト812を介してねじ切りされる。ねじ808は、第一の端部で第一の軸受アセンブリ814aに連結され、また、第二の端部で第二の軸受アセンブリ814bを介してモーター810に連結される。モーター810は、モーターマウント824を経て筐体560に、および/またはモールドアセンブリの横断部材434aのような側方/横断部材に選択的に連結される。
【0086】
図15Aに記載されたものに類似した形態において、第二のギア要素640は、図14に示されるように、第一のギア要素572bおよび572eの傾斜チャネル616を摺動可能にインターロックして、これと嵌合する複数の傾斜チャネル618を含む。第二のギア要素640は、線状軸受ブロック646に連結されるので、モーター810が駆動されてねじ808を反時計回りの方向816に回転させたときに、第二のギア要素640は、線状ベアリングトラック650に沿って方向818に駆動される。第二のギア要素640が方向818に移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、図12および14に示されるライナープレート432a〜432fのようなライナープレートを、モールドキャビティ446a〜446fの内部に向かって伸長する。
【0087】
モーター810が駆動されて、ねじ808を時計回りの方向820に回転させるとき、第二のギア要素640は、線状ベアリングトラック650に沿って方向822に駆動される。第二のギア要素640が方向822に移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、図12および14に示されるライナープレート432a〜432fのようなライナープレートを、モールドキャビティ446a〜446fの内部から離れるように引き込む。一実施態様では、ライナープレートがモールドキャビティの内部に向かって伸長する、およびこれから離れるように引き込む距離は、図14に示されるように、一対の近接スイッチ706aおよび706bに基づいて制御される。別の実施態様では、ライナープレートの移動距離は、モーター810によって駆動されるねじ808の回転数に基づいて制御される。
【0088】
図18Bおよび18Cは、図18Aに示されるような駆動アセンブリ550をそれぞれ断面A−AおよびB−Bから見た横方向断面図および長手方向断面図である。筐体560の外部に位置するものとして示されているが、別の実施態様では、モーター810は筐体560内に実装される。
【0089】
上述のように、コンクリートブロックは、広義にはコンクリートメーソンリユニット(CMU)とも称され、例えば、パティオブロック、舗装材料、軽量ブロック、グレーブロック、建築ユニット、および土留め壁ブロックのような多種多様なブロックを包含する。コンクリートブロック、メーソンリブロック、およびコンクリートメーソンリユニットという用語は、本願明細書において代替可能に用いられ、本発明のアセンブリ、システム、および方法による形成に好適な全ての種類のコンクリートメーソンリユニットを含むことを意図するものである。さらに、本願明細書において、主にコンクリート、ドライキャストコンクリート、または他のコンクリート混合物を含み、これを用いたものとして記述されているが、本発明のシステム、方法、およびコンクリートメーソンリユニットは、当該の材料に制限されるものではなく、当該のブロックの形成に好適なあらゆる材料の使用を包含することを意図するものである。
【0090】
図19Aおよび19Bは、関連する可動ライナープレート852(破線で示され、図1および2の可動ライナープレート32に類似する)を移動させるための、本発明による駆動アセンブリ850の一実施態様のそれぞれ斜視図および上面図である。図を簡素化するために、可動ライナープレート852の一部であるモールドアセンブリの側方および横断部材(図1のモールドアセンブリの側方および横断部材34a、34bおよび36a、36bに類似する)は図示していない。
【0091】
駆動アセンブリ850は、第一の駆動要素854と、第二の駆動要素858を含むアクチュエータアセンブリ856とを含む。一実施態様では、第二の駆動要素858は、x軸870について非ゼロ角度(θ)862の線状レール860を含む。一実施態様では、第一の駆動要素854は、第一の端部866に隣接したチャネル864を含み、チャネル864は、可動ライナープレート852に対して実質的に非ゼロ角度(θ)862であり、第一の駆動要素854が、可動ライナープレート852および第二の駆動要素858に対して実質的に直角であるように、線状レール860を摺動可能に受け、これをインターロックするように構成される。第一の駆動要素854の第二の端部868は、可動ライナープレート852に選択的に連結される。
【0092】
アクチュエータアセンブリ856は、第二の駆動要素858を実質的に線形にx軸870に沿って移動させるように構成される。第一の駆動要素854は、実質的にy軸872に沿った動作が制限される。一実施態様では、第一の駆動要素854は、上述の図2によって示されるギアトラック80に類似した、モールドアセンブリの側方または横断部材(図示せず)を介してガイドトラックを通って延在する。一実施態様では、可動ライナープレート852は、モールドアセンブリの側方または横断部材(図示せず)に伸長し、y軸872に沿った可動ライナープレート852の動作をガイドおよび制限する、ガイドポスト870aおよび870bのような(図2のガイドポスト88a〜88dに類似する)1つ以上のガイドポストを含む。
【0093】
動作中に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第一の方向874に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って移動し、それによって、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って第一の方向に876を移動させる。同様に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第二の方向878に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って移動し、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って方向880に移動させる。第一の駆動要素854のy軸872に沿った動作の程度は、角度(θ)862に比例する(すなわち、角度(θ)862が大きくなるほど、第二の駆動要素858のx軸870に沿った動作に対する、第一の駆動要素854のy軸872に沿った動作の割合が大きくなる)ことに留意されたい。
【0094】
一実施態様では、図19Aおよび19Bに示されるように、アクチュエータアセンブリ856は、図15A〜15Cで図示および説明した両ロッド端ピストンアセンブリ606に類似した、両ロッド端ピストンアセンブリ882を含む。両ロッド端ピストンアセンブリ882は、第二の駆動要素854内に選択的に連結され、第一および第二の中空ロッド端886および888を有する中空ピストン体884を含む。図15A〜15Cの両ロッド端部アセンブリ606に関して上述したように、油圧媒体は、中空ピストン体884との間を給送されて、第二の駆動要素858をx軸870に沿って第一および第二の方向876および878に駆動する。一実施態様では、アクチュエータアセンブリ856は、図18A〜18Cで図示および説明したねじ駆動システム806に類似した、ねじ駆動システム(図示せず)を備えて、第二の駆動要素858をx軸870に沿って第一および第二の方向876および878に駆動する。
【0095】
図20は、本発明による駆動アセンブリ900の一実施態様の斜視図である。駆動アセンブリ900は、上述の図19Aおよび19Bで図示および説明した駆動アセンブリ850に類似する。但し、第二の駆動要素858が線状レール860の代わりに曲線レール902を含み、第一のギア要素854がチャネル864の代わりに一対のローラ要素904aおよび904bを含むことを除く。ローラ要素904aおよび904bは、互いに隔設され、曲線レール902に接触し、これに架かるように構成される。一実施態様では、曲線のレール902は、事実上「蛇行」しており、可動ライナープレート852からの距離が、曲線レール902の部分908および910よりも離れている部分906を有する。駆動アセンブリ850と同様に、可動ライナープレート852および第一のギア要素854はy軸872に沿った動作が制限され、第二のギア要素858はx軸870に沿った動作が制限される。
【0096】
動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をx軸870に沿って前後に駆動し、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って伸長および引き込むように構成される。例えば、ローラ要素904aおよび904bが部分908から部分906まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第一の方向912に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第一の方向914に移動する(すなわち、関連するモールドキャビティから“引き込む”)。同様に、ローラ要素904aおよび904bが部分906から部分910まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第一の方向912に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第二の方向916に移動する(すなわち、関連するモールドキャビティから“伸長する”)。
【0097】
同様に、ローラ要素904aおよび904bが部分910から部分906まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第二の方向918に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第一の方向914に移動する(すなわち、関連するモールドキャビティから“引き込む”)。同様に、ローラ要素904aおよび904bが部分906から部分908まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第二の方向918に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第二の方向916に移動する(すなわち、関連するモールドキャビティから“伸長する”)。
【0098】
図21は、本発明による駆動アセンブリ950の一実施態様を示す上面図である。駆動アセンブリ950は、上述の図19Aおよび19Bで図示および説明した駆動アセンブリ850に類似する。但し、第二の駆動要素858がレール要素(例えばライナーレール860および曲線のレール902)を含まず、第一の駆動要素が、第一の端部952で、第一のピン954を経て可動ライナープレート852に回動可能に連結され、また、第二の端部956で、第二のピン958を経て第二のギア要素858に回動可能に連結されることを除く。第二のギア要素858はy軸872に沿った動作が制限され、可動ライナープレート852はx軸870に沿った動作が制限される。
【0099】
図21に示されるように、実線は、可動ライナープレート852が伸長位置960にあるときの駆動アセンブリ950を示し、破線は、可動ライナープレート852が引き込み位置962にあるときの駆動アセンブリ950を示す。動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をx軸870に沿って前後に駆動し、第一の駆動要素854が第一および第二のピン954および958の周囲を回転するときに、第一の駆動要素854が可動ライナープレート852をy軸872に沿って前後に駆動するように構成される。
【0100】
例えば、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までy軸968に沿って方向966に距離D1 964駆動するとき、第一の駆動要素854は、破線で示された位置まで第一および第二のピン954および958の周囲を回転し、可動ライナープレート852を伸長位置960から引き込み位置962までx軸974に沿って方向972に距離D2 970引き寄せる。同様に、アクチュエータアセンブリ856が、第二の駆動要素858を引き込み位置から伸長位置までy軸968に沿って方向976に距離D1 964駆動するとき、第一の駆動要素854は、実線で示された位置まで第一および第二のピン954および958の周囲を回転し、可動ライナープレート852を引き込み位置962から伸長位置960までx軸974に沿って方向978に距離D2 970押す。一実施態様では、停止要素980は、アクチュエータアセンブリ856が、第一の駆動要素854を実質的に完全に拡張した位置を越えて移動させないようにする。
【0101】
図22は、同時に2つの可動ライナープレートを移動するための本発明による駆動アセンブリ1000の上面図である。駆動アセンブリ1000は、上述の図21で図示および説明した駆動アセンブリ950に類似する。但し、アクチュエータアセンブリ856が、モールドアセンブリの別個のモールドキャビティの対応する可動ライナープレート852aおよび852bにそれぞれ連結された、一対の第一の駆動要素854aおよび854bを含むことを除く(上述の図11Aで図示および説明したモールドアセンブリ360のモールドキャビティ46aおよび46bの可動ライナープレート32cおよび32eに類似する)。第一の駆動要素854aは、ピン958bを介して可動ライナープレート852aに、また、ピン958aを経て第二の駆動要素858に回動可能に連結され、第一の駆動要素854bは、ピン954bを介して可動ライナープレート852bに、また、ピン958bを経て第二の駆動要素858に回動可能に連結される。第二の駆動要素858はy軸872に沿った移動が制限され、可動ライナープレート852aおよび852bはx軸870に沿った移動が制限される。
【0102】
図22に示されるように、実線は、可動ライナープレート852aおよび852bがそれぞれの伸長位置960aおよび960bにあるときの駆動アセンブリ1000を示し、破線は、可動ライナープレート852aおよび852bがそれぞれの引き込み位置962aおよび962bにあるときの駆動アセンブリ1000を示す。動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をy軸872に沿って前後に駆動し、可動ライナープレート852aおよび852bが、それぞれの第一の駆動要素854aおよび854bを経てx軸870に沿って前後に駆動するように構成される。
【0103】
例えば、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までx軸870に沿って方向966に距離D1 964駆動するとき、第一の駆動要素854aは、破線で示された位置までピン954aおよび958aの周囲を回転し、可動ライナープレート852aを伸長位置960aから引き込み位置962aまでy軸872に沿って方向972aに距離D2 970a押す。同時に、第一の駆動要素854bが、破線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852bを伸長位置960bから引き込み位置962bまでy軸872に沿って方向972bに距離D2 970b押す。
【0104】
逆に、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までx軸870に沿って方向976に距離D1 964駆動するとき、第一の駆動要素854aは、実線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852aを引き込み位置962aから伸長位置960aまでy軸872に沿って方向978aに距離D2 970a押す。同時に、第一の駆動要素854bが、実線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852bを伸長位置962bから引き込み位置960bまでy軸872に沿って方向978bに距離D2 970b押す。
【0105】
図23は、同時に2つの可動ライナープレートを移動するための本発明による駆動アセンブリ1050の一実施態様の斜視図である。駆動アセンブリ1050は、上述の図19A、19B、および20で図示および説明した駆動アセンブリ850および900に類似する。但し、アクチュエータアセンブリ856が、モールドアセンブリの別個のモールドキャビティの対応する可動ライナープレート852aおよび852bに、第一の端部1055aおよび第二の端部1055bでそれぞれ連結された、一対の第三の駆動要素1054aおよび1054bを含むことを除く(上述の図11Aで図示および説明したモールドアセンブリ360のモールドキャビティ46aおよび46bの可動ライナープレート32cおよび32eに類似する)。
【0106】
図示されるように、第一の駆動要素854は、線状レール860を摺動可能にインターロックし、これに沿って移動するように構成され、x軸872に対して非ゼロ角度(θ)862にあるチャネル864を含む。第一の駆動要素854は、第一組の傾斜チャネル1056aと、第一の駆動要素854の対向側上の第二組の傾斜チャネル1056bとをさらに含む。第三の駆動要素1054aおよび1054bは、第一の駆動要素854の傾斜チャネル1056aおよび1056bを摺動可能にインターロックするようにそれぞれ構成された、複数組の傾斜チャネル1058aおよび1058bをそれぞれ含む。傾斜チャネル1056a、1056b、1058a、および1058bは、図5A〜9Bを参照して上述したものに類似する。一実施態様では、図23に示されるように、第一の駆動要素854は、可動ライナープレート852aおよび852bと、それらが対応するモールドキャビティとの間に配置される(例えば、上述の図11Aで図示および説明したように、可動ライナープレート32cおよび32eと、対応するモールドキャビティ46aおよび46bとの間の横断部材36cの内側)。
【0107】
動作中に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第一の方向874に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って架かり、第一の駆動要素854をy軸872に沿って第一の方向876に移動させる。また、傾斜チャネル1056aおよび1058aと、傾斜チャネル1056bおよび1058bとの間の相互作用によって、第三のギア要素1054aおよび1054b、および対応する可動ライナープレート852aおよび852bを、それぞれのモールドキャビティの内部に向かってx軸870に沿って方向1060aおよび1060bに移動させる。
【0108】
逆に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第二の方向878に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って架かり、第一の駆動要素854をy軸872に沿って第二の方向880に移動させる。また、傾斜チャネル1056aおよび1058aと、傾斜チャネル1056bおよび1058bとの間の相互作用によって、第三のギア要素1054aおよび1054b、および対応する可動ライナープレート852aおよび852bを、それぞれのモールドキャビティの内部から離れるようにx軸870に沿って方向1062aおよび1062bに移動させる。
【0109】
特定の実施態様を例示および説明したが、当業者は、様々な代替物および/または同等物を、本発明の範囲を逸脱しない範囲で、図面とともに記載された特定の実施態様の代用とすることが可能であるものと理解されよう。本出願は、本願明細書に記述された特定の実施態様のあらゆる適合例または変形例をカバーするものである。したがって、請求項およびその同等物によってのみ本発明が制限されることを意図するものである。
【技術分野】
【0001】
(関連出願の引用)
本出願の内容は、米国仮特許出願第60/679,464号(2005年5月10日出願)の内容に関連し、米国特許法第119条第(e)項の優先権の利益を主張するものであり、参考として本明細書に援用される。
【0002】
本出願は、米国特許出願第10/629,460号(2003年7月29日出願、発明の名称「CONCRETE BLOCK MOLD WITH MOVEABLE LINER」、代理人事件番号H295.101.101)、米国特許出願第10/879,381号(2004年6月29日出願、発明の名称「CONCRETE BLOCK MOLD WITH MOVEABLE LINER」、代理人事件番号H295.104.101)および米国特許出願第11/036,147号(2005年1月13日出願、発明の名称「BLOCK MOLD HAVING MOVEABLE LINER」、代理人事件番号H295.107.101)に関連し、それらのすべては参考として本明細書に援用される。
【0003】
(発明の分野)
本発明は、ブロックモールドに関し、特に、コンクリートブロックマシンで使用するように構成された、少なくとも1つの可動ライナーを有するコンクリートブロックモールドに関する。
【背景技術】
【0004】
コンクリートブロックは、コンクリートメーソンリユニット(concrete masonry unit:CMU)とも称され、一般的に、モールドボックスを形成するように組み立てられたモールドフレームを用いたコンクリートブロックマシンを使用して、種々の形状に形成することによって製造される。形成されるべきブロックの所望のネガティブ形状を有するモールドキャビティが、モールドボックス内に備えられる。サポートボード、すなわちパレットが、コンベアシステムを経てパレットテーブル上に移動する。パレットテーブルは、パレットが接触してモールドボックスの下部を形成するまで上方に移動する。次いで、キャビティには、可動供給ボックスドロワによってコンクリートが充填される。
【0005】
モールドにコンクリートが充填されると、供給ボックスドロワが格納位置に戻り、プランジャ、すなわちヘッドシューアセンブリがモールドの上部を形成するように下降する。ヘッドシューアセンブリは、一般的に、モールドキャビティの上部外面に合わせられ、油圧的または機械的にコンクリート上に押し付けられる。ヘッドシューアセンブリは、コンクリートを所望のポンド/平方インチ(psi)およびブロックの寸法に加圧し、同時に、振動テーブルとともにモールドを振動させて、モールドキャビティ全体を実質的に加圧してコンクリートを最適に行き渡らせる。
【0006】
加圧によって、コンクリートは、完成ブロックをモールドから即座に取り外すことができるような硬さのレベルに達する。完成したブロックを取り外すには、モールドを固定したままで、対応するパレットとともにシューおよびパレットテーブルを下方に移動させ、ブロックをモールドからパレット上に押し出す。ヘッドシューアセンブリの底縁がモールドの底縁をクリアにすると、コンベアシステムが完成ブロックを載せたパレットを前方に移動させ、別のパレットがモールドの下に配置される。次いで、パレットテーブルが次のパレットを上昇させて、次のブロックのためのモールドボックスの底部を形成し、プロセスが繰り返される。
【0007】
多くの種類のCMU(例、舗装材料、パティオブロック、軽量ブロック、シンダーブロックなど)、特に土留め壁ブロックおよび建築ユニットの場合、ブロックの少なくとも1つの面が、石材状のテクスチャのような所望のテクスチャを有することが望ましい。所望のテクスチャをブロックの表面に作製するための1つの手法は、テクスチャの所望のネガティブパターンをモールドの側壁上に提供するものである。しかし、その手法では完成ブロックがモールドから垂直に取り出されるので、ブロックが取り出される前にモールド内部から離れない限り、いかなるパターンまたはテクスチャも側壁から取り除かれてしまう。
【発明の概要】
【発明が解決しようとする課題】
【0008】
モールドの側壁を移動させるために用いられる1つの手法では、モールドの側壁を内側に移動させて、対抗ばねが側壁をモールドの中央から外側に押すようなカム機構の使用を伴う。しかし、この手法では、側壁が内側に移動させられ、ばねに蓄えられたエネルギに依存して側壁を外側に移動させるときにのみ、側壁に“動的な”力を加える。ばねに蓄えられたエネルギは、側壁がコンクリートに固着した場合には、側壁を引き込むには不十分になる可能性がある。加えて、コンクリートブロックマシンの限られた範囲内でカム機構を用いることが困難になる可能性がある。
【0009】
第二の手法では、ピストンを使用した側壁の伸長および引き込みを伴う。しかし、ピストンシャフトのシャフトが可動側壁に直接連結されており、可動側壁の移動方向に従って移動する。したがって、ヘッドシューアセンブリによるコンクリートの加圧中に、ピストンシャフトを経て膨大な圧力がピストンに直接加えられる。結果的に、コンクリートの加圧中および振動中に側壁を適所に保持するには、高いpsiレーティングを有するピストンが必要となる。加えて、ピストンシャフトに直接圧力が加わることで、ピストンの摩耗が増加し、期待耐用年数が短くなる可能性がある。
【課題を解決するための手段】
【0010】
本発明の一実施態様は、コンクリートブロックを製造する、コンクリートブロックマシンで使用するように構成されたモールドアセンブリを提供する。該モールドアセンブリは、少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティと、駆動アセンブリとを形成する複数のライナーを含む。該駆動アセンブリは、第一の端部を有し、第二の端部に隣接した該第一の可動ライナープレートに連結された第一の駆動要素と、アクチュエータアセンブリとを含む。該アクチュエータアセンブリは、第一の端部に隣接した該第一の駆動要素に選択的に連結された第二の駆動要素を含み、該アクチュエータアセンブリは、該第一の駆動要素の少なくとも該第二の端部を第二の軸に沿って移動させ、該第一の可動ライナープレートを該第一のモールドキャビティに向かうように、およびこれから離れるように移動させるように、該第二の駆動要素を第一の軸に沿って駆動するように構成されている。
例えば、本願発明は以下を提供する。
(項目1)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部を有し、第二の端部に隣接した上記第一の可動ライナープレートに連結された第一の駆動要素と、上記第一の端部に隣接した上記第一の駆動要素に選択的に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第二の駆動要素を第一の軸に沿って駆動するように構成されていることにより、少なくとも上記第一の駆動要素の上記第二の端部を第二の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目2)
上記第二の軸は、上記第一の軸に対して実質的に垂直である、項目1に記載のモールドアセンブリ。
(項目3)
上記第二の駆動要素はレール要素を含み、上記第一の駆動要素は上記レール要素に摺動可能に連結されている、項目1に記載のモールドアセンブリ。
(項目4)
上記レール要素は、実質的に線状であり、上記第一の軸との角度がゼロではない、項目3に記載のモールドアセンブリ。
(項目5)
上記レール要素は、上記第一の軸に比べて曲線である、項目3に記載のモールドアセンブリ。
(項目6)
上記第一の駆動要素は、上記レール要素を摺動可能に受けて、これとインターロックするように構成されている上記第一の要素に隣接したチャネルを含む、項目3に記載のモールドアセンブリ。
(項目7)
上記第一の駆動要素は、上記レール要素を摺動可能に受けるように間隔が置かれ、上記レール要素に追従するように構成されている複数のローラ要素を含む、項目3に記載のモールドアセンブリ。
(項目8)
上記第一の駆動要素は、上記第一の端部に隣接した上記第二の駆動要素に回転可能に連結され、上記第二の端部に隣接した上記第一の可動ライナープレートに回転可能に連結されている、項目1に記載のモールドアセンブリ。
(項目9)
第一の端部に隣接して上記第二の駆動要素に連結され、第二の端部に隣接して第二のモールドキャビティの第二の可動ライナープレートに連結された、第三の駆動要素をさらに含み、上記第一の軸に沿って上記第二の駆動要素を駆動する上記アクチュエータアセンブリに応答して、少なくとも上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って移動して、上記第二のライナープレートを上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目1に記載のモールドアセンブリ。
(項目10)
上記第一および第二の可動ライナープレートの移動は、実質的に上記第二の軸に平行である、項目9に記載のモールドアセンブリ。
(項目11)
上記駆動アセンブリは、
上記第一の駆動要素と上記第一の可動ライナープレートとの間に選択的に連結された第三の駆動要素と、
上記第一の駆動要素と第二のモールドキャビティの第二の可動ライナープレートとの間に選択的に連結された第四の駆動要素と
を含み、上記第三の駆動要素が第三の軸を移動させ、上記第四の駆動要素が第四の軸に沿って移動することにより、それぞれが上記第一および上記第二の可動ライナープレートを上記第一および上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させ、上記第三および上記第四の軸は、実質的に上記第一の軸に平行である、項目1に記載のモールドアセンブリ。
(項目12)
上記第一および上記第二の可動ライナープレートの移動は、実質的に上記第一の軸の方向に平行である、項目10に記載のモールドアセンブリ。
(項目13)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部と第二の端部とを有し、上記第二の端部が上記第一の可動ライナープレートに回転可能に連結された第一の駆動要素と、上記第一の駆動要素の上記第一の端部に回転可能に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第二の駆動要素を上記第一の軸に沿って駆動するように構成されていることにより、上記第一の駆動要素の上記第一の端部が回転して第一の軸に沿って移動し、上記第二の端部が回転して、上記第一の軸に実質的に垂直である第二の軸に沿って移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目14)
上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って第一の方向に移動させるときに、上記第一の駆動要素の上記第二の端部が上記第二の軸に沿って第一の方向に移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部から離れるように移動させ、上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って第二の方向に移動させるときに、上記第一の駆動要素の上記第二の端部が上記第二の軸に沿って第二の方向に移動し、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように移動させる、項目13に記載のモールドアセンブリ。
(項目15)
上記駆動アセンブリは、上記第二の駆動要素に回転可能に連結された第一の端部と、第二のモールドキャビティの第二の可動ライナープレートに回転可能に連結された第二の端部とを有する第三の駆動要素をさらに含み、上記第一の端部が上記第一の軸に沿って移動し、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って移動して、上記第二の駆動要素が上記第一の軸に沿って移動するときに、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目14に記載のモールドアセンブリ。
(項目16)
上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って上記第一の方向に移動させるときに、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って上記第二の方向に移動し、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部から離れるように移動させ、上記アクチュエータアセンブリが上記第二の駆動要素を上記第一の軸に沿って上記第二の方向に移動させるときに、上記第三の駆動要素の上記第二の端部が上記第二の軸に沿って上記第一の方向に移動し、上記第二の可動ライナープレートを上記第二のモールドキャビティの内部に向かうように移動させる、項目15に記載のモールドアセンブリ。
(項目17)
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、上記モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の駆動要素を有するアクチュエータアセンブリと、上記第一の駆動要素と上記第一の可動ライナープレートとの間に連結された第二の駆動要素とを備えた、駆動アセンブリと
を備え、上記アクチュエータアセンブリは、上記第一の駆動要素を上記第一の軸に沿って駆動するように構成されていることにより、上記第二の駆動要素を第一の軸に垂直な第二の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
(項目18)
上記第二の駆動要素は第一の傾斜チャネルを含み、上記駆動アセンブリは、上記第一の可動ライナープレートに連結され、上記第二の駆動要素の上記第一の複数の傾斜チャネルと摺動可能にインターロックするように構成されている複数の傾斜チャネルを有する第三の駆動要素をさらに含み、上記第二の駆動要素の上記第一の複数の傾斜チャネルと上記第三の駆動要素の上記複数の傾斜チャネルとの間の相互作用は、上記第二の駆動要素の上記第二の軸に沿った移動に応答して、上記第三の駆動要素を第三の軸に沿って移動させ、上記第一の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目17に記載のモールドアセンブリ。
(項目19)
上記第二の駆動要素は、第二の複数の傾斜チャネルを含み、上記駆動アセンブリは、第二のモールドキャビティの第二の可動ライナープレートに連結され、上記第二の駆動要素の上記第二の複数の傾斜チャネルと摺動可能にインターロックするように構成されている複数の傾斜チャネルを有する第四の駆動要素をさらに含み、上記第二の駆動要素の上記第二の軸に沿った移動に応答して、上記第二の駆動要素の上記第二の複数の傾斜チャネルと、上記第四の駆動要素の上記複数の傾斜チャネルとの間の相互作用は、上記第四の駆動要素を更なる軸に沿って移動させ、上記第二の可動ライナープレートを上記第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、項目18に記載のモールドアセンブリ。
(項目20)
上記第三および上記第四の軸は上記第一の軸に実質的に平行であり、上記第一および上記第二の可動ライナープレートの上記第一および第二のモールドキャビティの内部に向かう、およびこれから離れる動作は、上記第一の軸に実質的に平行である、項目19に記載のモールドアセンブリ。
(項目21)
上記第一の軸に沿った第一の方向への上記第一の駆動要素の動作は、上記第二の駆動要素の上記第二の軸に沿った第一の方向への動作を生じさせ、上記第三の駆動要素の上記第三の軸に沿った第一の方向への動作および上記第一の可動ライナープレートの上記第一のモールドキャビティの内部に向かう動作を生じさせ、ならびに上記第四の駆動要素の上記第四の軸に沿った第一の方向への動作および上記第二の可動ライナープレートの上記第二のモールドキャビティの内部に向かう動作を生じさせ、上記第三の軸に沿った上記第一の方向は、上記第四の軸に沿った上記第一の方向と反対である、項目19に記載のモールドアセンブリ。
(項目22)
上記第一の軸に沿った第二の方向への上記第一の駆動要素の動作は、上記第二の駆動要素の上記第二の軸に沿った第二の方向への動作を生じさせ、上記第三の駆動要素の上記第三の軸に沿った第二の方向への動作および上記第一の可動ライナープレートの上記第一のモールドキャビティの内部から離れる動作を生じさせ、ならびに上記第四の駆動要素の上記第四の軸に沿った第二の方向への動作および上記第二の可動ライナープレートの上記第二のモールドキャビティの内部から離れる動作を生じさせ、上記第三の軸に沿った上記第二の方向は、上記第四の軸に沿った上記第二の方向と反対である、項目21に記載のモールドアセンブリ。
【図面の簡単な説明】
【0011】
【図1】図1は、本発明による可動ライナープレートを有するモールドアセンブリの1つの例示的な実施態様の斜視図である。
【図2】図2は、本発明によるギア駆動アセンブリおよび可動ライナープレートの1つの例示的な実施態様の斜視図である。
【図3−1】図3Aは、図2に示されたギア駆動アセンブリおよび可動ライナープレートの上面図である。
【図3−2】図3Bは、図2に示されたギア駆動アセンブリおよび可動ライナープレートの側面図である。
【図4】図4Aは、ライナープレートを引き込んだ、図1のモールドアセンブリの上面図である。図4Bは、ライナープレートを伸長した、図1のモールドアセンブリの上面図である。
【図5】図5Aは、本発明によるギアプレートの1つの例示的な実施態様の上面図である。図5Bは、図5Aに示されるギアプレートの端面図である。図5Cは、本発明によるギアヘッドの1つの例示的な実施態様の底面図である。図5Dは、図5Cのギアヘッドの端面図である。
【図6】図6Aは、本発明によるギアトラックの1つの例示的な実施態様の上面図である。図6Bは、図6Aのギアトラックの側面図である。図6Cは、図6Aのギアトラックの端面図である。
【図7】図7は、本発明によるギアトラックとギアプレートとの関係を示す図である。
【図8−1】図8Aは、本発明によるギアヘッドと、ギアプレートと、ギアトラックとの関係を示す上面図である。
【図8−2】図8Bは、図8Aの実例の側面図である。図8Cは、図8Aの実例の端面図である。
【図9−1】図9Aは、本発明によるギアトラック内の引き込み位置にあるギアプレートの1つの例示的な実施態様を示す上面図である。
【図9−2】図9Bは、本発明によるギアトラックから伸長した位置にあるギアプレートの1つの例示的な実施態様を示す上面図である。
【図10】図10Aは、本発明による駆動ユニットの1つの例示的な実施態様を示す図である。図10Bは、図10Aの実例の駆動ユニットの部分的な上面図である。
【図11−1】図11Aは、本発明によるモールドアセンブリの1つの例示的な実施態様を示す上面図である。
【図11−2】図11Bは、本発明によるギア駆動アセンブリの1つの例示的な実施態様を示す図である。
【図12】図12は、本発明によるモールドアセンブリの1つの例示的な実施態様の一部を示す斜視図である。
【図13】図13は、本発明によるギア駆動アセンブリの1つの例示的な実施態様を示す斜視図である。
【図14】図14は、本発明によるモールドアセンブリおよびギア駆動アセンブリの一部の1つの例示的な実施態様を示す上面図である。
【図15−1】図15Aは、スタビライザアセンブリを用いたギア駆動アセンブリの1つの例示的な実施態様の一部を示す上面図である。
【図15−2】図15Bは、図15Aのギア駆動アセンブリの断面図である。図15Cは、図15Aのギア駆動アセンブリの断面図である。
【図16】図16は、本発明によるギア駆動アセンブリおよび可動ライナープレートの1つの例示的な実施態様の一部を示す側面図である。
【図17】図17は、本発明による制御システムを用いたモールドアセンブリの1つの例示的な実施態様を示すブロック図である。
【図18−1】図18Aは、本発明によるねじ駆動システムを用いたギア駆動アセンブリの1つの例示的な実施態様の一部を示す上面図である。
【図18−2】図18Bは、図18Aのギア駆動アセンブリの側断面図である。図18Cは、図18Aのギア駆動アセンブリの長手方向断面図である。
【図19】図19Aは、本発明による駆動アセンブリの一実施態様の斜視図である。図19Bは、図19Aの駆動アセンブリの上面図である。
【図20】図20は、本発明による駆動アセンブリの一実施態様の斜視図である。
【図21】図21は、本発明による駆動アセンブリの一実施態様の上面図である。
【図22】図22は、本発明による駆動アセンブリの一実施態様の上面図である。
【図23】図23は、本発明による駆動アセンブリの一実施態様の斜視図である。
【発明を実施するための形態】
【0012】
以下の詳細な説明においては、本発明の一部を形成し、本発明を実施することが可能な特定の実施例を例証するために示される添付図面を参照する。この点に関して、“上部”、“下部”、“前部”、“背部”、“先行”、“背向”などのような方向を示す用語は、記載されている図面の方向に関連して使用される。本発明の実施態様の構成要素は、複数の異なる方向に配置することができるので、方向を示す用語は図示のために使用されるものであり、制限するためのものではない。本発明の範囲から逸脱することなく、他の実施態様を用いることが可能であり、また構造的または論理的な変更を行うことが可能であるものと理解されたい。したがって、以下の発明を実施するための最良の形態は、限定的に取り入れられるものではなく、本発明の範囲は添付の特許請求の範囲によって定義される。
【0013】
図1は、本発明による可動ライナープレート32a、32b、32cおよび32dを有するモールドアセンブリ30の1つの例示的な実施態様の斜視図である。モールドアセンブリ30は、それぞれが内壁38a、38b、40aおよび40bを有し、内表面がモールドボックス42を形成するように互いに連結された、側方部材34aおよび34bと、横断部材36aおよび36bとを有する駆動システムアセンブリ31を含む。図示した実施態様では、横断部材36aおよび36bは、ボルト37によって側方部材34aおよび34bにボルトで固定される。
【0014】
可動ライナープレート32a、32b、32cおよび32dは、モールドキャビティ46を形成するように、それぞれが前面部44a、44b、44cおよび44dを有する。図示した実施態様では、各ライナープレートは、隣接したモールドフレーム部材の内部に位置する関連するギア駆動アセンブリを有する。ライナープレート32aに対応し、横断部材36aの内部に位置するギア駆動アセンブリ50の一部が、側方部材34aを通って延在していることが示されている。各ギア駆動アセンブリは、関連するライナープレートに選択的に連結され、関連する横断部材に平行な第一の方向に第一の力を加えることによって、モールドキャビティ46の内部に向かってライナープレートを移動させ、また第一の方向と反対の方向に第二の力を加えることによって、モールドキャビティ46の内部から離れるようにライナープレートを移動させるように構成されている。側方部材34aおよび34b、および横断部材36aおよび36bは、部材内に伸長し、対応するギア要素を潤滑する対応する潤滑ポートをそれぞれ有する。例えば、潤滑ポート48aおよび48bである。本発明によるギア駆動アセンブリおよび可動ライナープレートについては、以下に詳述する。
【0015】
動作中に、モールドアセンブリ30は、コンクリートブロックマシンに選択的に連結される。しかし、説明を簡単にするために、図1にはコンクリートブロックマシンを図示していない。一実施態様では、モールドアセンブリ30は、駆動システムアセンブリ31の側方部材34aおよび34bをコンクリートブロックマシンにボルトで固定することによって、コンクリートブロックマシンに載置される。一実施態様では、モールドアセンブリ30は、実質的にモールドキャビティ46と同じ寸法であるヘッドシューアセンブリ52をさらに含む。ヘッドシューアセンブリ52は、コンクリートブロックマシンに選択的に連結するようにも構成されている。
【0016】
ライナープレート32a〜32dは、最初に、モールドボックス42の内部に向かって所望の距離伸長して、所望のモールドキャビティ46を形成する。次いで、パレット56が接触してモールドキャビティ46を形成するように、パレット56が配置される振動テーブルが(矢視58で示されるように)上昇する。一実施態様では、コアバーアセンブリ(図示せず)がモールドキャビティ46内に配置され、特定のブロックの設計要件に従って、完成ブロック内に空隙を作製する。
【0017】
次いで、可動供給ボックスドロワからモールドキャビティ46にコンクリートが充填される。次いで、ヘッドシューアセンブリ52が、(矢視54で示されるように)モールドキャビティ46上に降ろされ、コンクリートを油圧的または機械的に加圧する。次いで、ヘッドシューアセンブリ52は、振動テーブルとともにモールドアセンブリ30を同時に振動させ、モールドキャビティ46内のコンクリートに高い圧力をもたらす。高レベルの加圧によってモールドキャビティ46内のあらゆる空隙が充填され、コンクリートは、完成ブロックをモールドキャビティ46から即座に取り外すことができるような硬さのレベルに迅速に達する。
【0018】
完成ブロックは、第一の引き込みライナープレート32a〜32dによって取り外される。次いで、パレット56とともにヘッドシューアセンブリ52および振動テーブルが(矢印58とは反対の方向に)下げられ、一方で、ヘッドシューアセンブリ56がモールドキャビティ46からパレット52上へ完成ブロックを押すように、モールドアセンブリ30が固定状態を保つ。ヘッドシューアセンブリ52の下縁がモールドアセンブリ30の下縁よりも下になったときに、コンベアシステムは、完成ブロックを搬送するパレット56を離れる方向に移動させて、新しいパレットがその場所に配置される。上述のプロセスを繰り返して、更なるブロックを作製する。
【0019】
完成ブロックをモールドキャビティ46から取り外す前にライナープレート32a〜32bを引き込むことによって、ライナープレート32a〜32dの摩耗が少なくなるので、期待耐用年数が長くなる。さらに、可動ライナープレート32a〜32dによって、ヘッドシューアセンブリ52が完成コンクリートブロックの“化粧面”となるべき面と接触するように、従来の水平位置の代わりに、コンクリートブロックをパレット56に対して垂直な位置で成形することも可能となる。“化粧面”とは、壁または他の構造物に取付けた後に視界に晒される可能性がある、ブロックの表面のことである。
【0020】
図2は、可動ライナープレート32aおよび対応するギア駆動アセンブリ50のような、本発明による可動ライナープレートおよび対応するギア駆動アセンブリを示す斜視図70である。説明の便宜上、側方部材34aおよび横断部材36は図示していない。ギア駆動アセンブリ50は、ライナープレート32aに選択的に連結された第一のギア要素72と、第二のギア要素74と、ピストンロッド78を経て第二のギア要素74に連結された片ロッド端複動式空気圧シリンダ(シリンダ)76と、ギアトラック80とを含む。シリンダ76は、空気圧フィッティングを受けるための開口部82を含む。一実施態様では、シリンダ76は、油圧シリンダを備える。一実施態様では、シリンダ76は、両ロッド端複動式シリンダを備える。一実施態様では、ピストンロッド78は、第二のギア要素74に螺合される。
【0021】
図2の実施態様には、第一のギア要素72および第二のギア要素74が示されているが、以降、それぞれギアプレート72および第二のギアプレート74と称する。しかし、ギアプレートおよび円筒ギアヘッドとして示されているが、第一のギア要素72および第二のギア要素74は任意の好適な形状および寸法とすることができる。
【0022】
ギアプレート72は、第一の主要面84上に複数の傾斜チャネルを含み、ギアトラック80内を摺動するように構成される。ギアトラック80は、内壁40aから横断部材36aに延在するギアスロット(図示せず)に摺動可能に挿入される。円筒ギアヘッド74は、雌型ギアプレート72の第一の主要面84に隣接した面86上に複数の傾斜チャネルを含み、この傾斜チャネルは、円筒ギアヘッド74の半径の接線であり、ギアプレート72の傾斜チャネルを摺動可能に嵌合およびインターロックするように構成されている。ライナープレート32aは、後面90から延在するガイドポスト88a、88b、88cおよび88dを含む。ガイドポストのそれぞれは、内壁40aから横断部材36aに延在する対応するガイド穴(図示せず)に摺動可能に挿入されるように構成されている。ギアスロットおよびガイド穴は、以下に詳述する。
【0023】
シリンダ76がピストンロッド78を伸長させると、シリンダギア74が矢印92で示される方向に移動し、インターロック傾斜チャネルによって、ギアプレート72およびライナープレート32aを、矢印94で示されるように、モールド46の内部に向かって移動させる。図2に示されるように、図示のピストンロッド78および円筒ギアヘッド74は、伸長位置にあることに留意されたい。シリンダ76がピストンロッド78を引き込むと、シリンダギア74が矢印96で示される方向に移動し、ギアプレート72およびライナープレート32を、矢印98で示されるように、モールドの内部から離れるように移動させる。ライナープレート32aが、モールドの方へ、またはこれから離れるように移動すると、ゲートプレート72がガイドトラック80内を摺動し、ガイドポスト88a〜88dが対応するガイド穴内を摺動する。
【0024】
一実施態様では、着脱可能なライナー面100は、ライナープレート32aを通って延在する締結具102a、102b、102cおよび102dを経て、前面部44aに選択的に連結される。着脱可能なライナー100は、モールド46で作製されるブロックに、所望の形状を提供する、および/または所望の刷り込みパターンを提供するように構成されている。この点に関しては、着脱可能なライナー面100は、所望のネガティブの形状またはパターンを備える。一実施態様では、着脱可能なライナー面100は、ポリウレタン材料からなる。一実施態様では、着脱可能なライナー面100は、ゴム材料からなる。一実施態様では、着脱可能なライナープレートは、鋼またはアルミニウムのような金属または合金からなる。一実施態様では、ライナープレート32は、後面90上の凹部104内に載置された加熱器をさらに含むことが可能であり、この加熱器は、モールド46内でのコンクリートの硬化を補助して、前面部44aおよび着脱可能なライナー面100へのコンクリートの固着を低減する。
【0025】
図3Aは、図2において矢視106で示されるギア駆動アセンブリ50およびライナープレート32aの上面図120である。図中、側方部材34aおよび34b、および横断部材36aを破線で示す。ガイドポスト88cおよび88dは、内面40aから横断部材36aに伸長するガイド穴122cおよび122d内にそれぞれ摺動可能に挿入される。それぞれがガイドポスト88aおよび88bに対応するガイド穴122aおよび122bは図示していないが、ガイド穴122cおよび122dの下方に位置し、これらと一列に並ぶ。一実施態様では、ガイド穴ブッシュ124cおよび124dは、それぞれガイド穴122cおよび122dに挿入され、ガイドポスト88cおよび88dを摺動可能に受ける。ガイド穴ブッシュ124aおよび124bは図示していないが、ガイド穴ブッシュ124cおよび124dの下方に位置し、これらと一列に並ぶ。ギアトラック80は、ギアトラック80内を摺動するギアプレート72とともに、横断部材36aを通って延在するギアスロット126内に摺動可能に挿入されたものとして示される。ギアプレート72は、前面部44aからライナープレート32aを通って延在する複数の締結具128によって、ライナープレート32aに連結されたものとして示される。
【0026】
破線134で示される円筒ギアシャフトは、側方部材34aを通って横断部材36a内に延在し、ギアスロット126と少なくとも部分的に交差する。円筒ギアヘッド74、シリンダ76、およびピストンロッド78は、ギアプレート72の上に配置された円筒ギアヘッド74とともにギアシャフト134内に摺動可能に挿入される。破線130で示される円筒ギアヘッド74の傾斜チャネルは、132で示されるギアプレート72の傾斜チャネルとインターロックしている。
【0027】
図3Bは、図2において矢視108で示されるギア駆動アセンブリ50およびライナープレート32aの側面図140である。ライナープレート32aは、横断部材36aから少なくとも部分的に伸長したものとして示される。それに応じて、ガイドポスト88aおよび88dは、それぞれガイド穴ブッシュ124aおよび124dから部分的に伸長したものとして示される。一実施態様では、一対の制限リング142aおよび142dは、それぞれガイドポスト88aおよび88に選択的に連結され、ライナープレート32aが、横断部材36aからモールドキャビティ46の内部に向かって伸長させることができる伸長距離を制限する。ガイドポスト88bおよび88cにそれぞれ対応する制限リング142bおよび142cは図示していないが、制限リング142aおよび142dの後ろに位置し、これらと一列に並ぶ。図示した実施態様では、制限リングは、ガイドポストの実質的に端部にあるものとして示され、したがって、横断部材36aからの可能な実質的最大伸長距離である。しかし、制限リングは、ガイドポストに沿った他の位置に配置することができ、それによって可能な伸長距離を調整する。
【0028】
図4Aおよび図4Bは、それぞれモールドアセンブリ30の上面図150および160である。図4Aは、引き込み位置にあるライナープレート32a、32b、32cおよび32dを示す図である。ライナー面152、154および154は、それぞれライナープレート32b、32cおよび32dに対応する。図4Bは、伸長位置にある対応するライナー面100、152、154および156とともに、ライナープレート32a、32b、32cおよび32dを示す図である。
【0029】
図5Aは、ギアプレート72の上面図170である。ギアプレート72は、ギアプレート72の上面174に延びる複数の傾斜チャネル172を含む。傾斜チャネル172は、表面として上面174を有する、対応する複数の線状の“歯”176を形成する。各傾斜チャネル172および各歯176は、それぞれ幅178および180を有する。傾斜チャネルは、ギアプレート72全体に、186で示される角度0°からの角度(θ)182で延びている。
【0030】
図5Bは、図5Aにおいて矢視184で示されるギアプレート72の端面図(“A”)185であり、複数の傾斜チャネル172および線状歯176をさらに示す図である。各傾斜チャネル172は、深さ192を有する。
【0031】
図5Cは、円筒ギアヘッド76の平坦面202の図200を示す図である。円筒ギアヘッド76は、表面202に延びる複数の傾斜チャネル204を含む。傾斜チャネル204は、対応する複数の線状歯206を形成する。傾斜チャネル204および線状歯206は、線状歯206の幅が傾斜チャネル172の幅と実質的に一致し、傾斜チャネル204の幅が線状歯176の幅と実質的に一致するように、それぞれ幅180および178を有する。傾斜チャネル204および歯206は、表面202全体に、186で示される角度0°からの角度(θ)182で延びている。
【0032】
図5Dは、図5Cにおいて矢視208で示される円筒ギアヘッド76のうちの端面図210であり、複数の傾斜チャネル204および線状歯206をさらに示す図である。表面202は、円筒ギアヘッド76の半径の接線の平坦面である。各傾斜チャネルは、平坦面202から深さ192を有する。
【0033】
円筒ギアヘッド76が“回転して”ギアプレート72の表面174上に配置されるとき、ギアヘッド76の線状歯206は、ギアプレート72の傾斜チャネル172と嵌合して、これをインターロックし、ギアプレート72の線状歯176は、ギアヘッド76の傾斜チャネル204と嵌合して、これをインターロックする(図2も参照のこと)。ギアヘッド76が方向92に押されるとき、ギアヘッド76の線状歯206は、ギアプレート72の線状歯176を押して、ギアプレート72を方向94に移動させる。逆に、ギアヘッド76が方向96に押されるとき、ギアヘッド76の線状歯206は、ギアプレート72の線状歯176を押して、ギアプレート72を方向98に移動させる。
【0034】
円筒ギアヘッド76がギアプレート72を方向94および98に押すためには、角度(θ)182を0°より大きく、90°より小さくなければならない。しかし、θ182は、少なくとも45°を超えることが好ましい。θ182が45°以下であると、モールド46内のコンクリートが加圧されるときのように、方向92に移動する円筒ギアヘッド74がギアプレート72を方向94に押すために必要な力が、ギアプレート72が方向98に押されて円筒ギアヘッド74を方向96に押すために必要な力よりも大きくなる。θ182が45°を超えて大きくなると、円筒ギアヘッド74を方向96に移動させるために、ギアプレート72に方向98に加える必要のある力がより大きくなる。実際に、90°で、ギアプレート72は、どれだけ多くの力を方向98においてギアプレート72に加えたとしても、円筒ギアヘッド74を方向92または96のいずれにも移動させることができなくなる。実質的に、角度(θ)は、ピストンロッド78を経てシリンダ76によって円筒ギアヘッド74に加えられる力の増幅器として作用する。θ182が45°を超えると、円筒ギアヘッド74を方向96に移動させるために、ギアプレート72に方向98に加える必要のある力の大きさが、ギアプレート72を適所に“保持する”ために(すなわち、モールド46内でコンクリートが加圧されているとき)、ピストンロッド78を経て円筒ギアヘッド74に方向92に加える必要のある力よりも大きくなる。
【0035】
しかし、θ182が45°を超えて大きくなると、円筒ギアヘッド74が方向92に押されるときに、ギアプレート72および対応するライナープレート32aが方向94に移動する距離がより短くなる。θ182の好適な動作角度は、ほぼ70°である。この角度は、ギアプレート72の移動長さと、ギアヘッド74を方向96に押すために、ギアプレート72に方向98に加える必要のある力の増加分との間の妥協点である。ギアプレート72および円筒ギアヘッド74、ならびにそれらの対応する傾斜チャネル176および206は、コンクリートがモールドキャビティ46内で加圧されているときに、ライナープレート32aの位置を保持するために必要なシリンダ76の必要なpsiレーティングを低減し、またシリンダ76によって受ける摩耗も低減する。加えて、上述の説明から、ライナープレート32aの移動距離を制御するための1つの方法は、それぞれがギアプレート72および円筒ギアヘッド74に対応する、傾斜チャネル176および206の角度(θ)182を制御するものであることは明らかである。
【0036】
図6Aは、ギアトラック80の上面図220である。ギアトラック80は、上面220と、第一の端面224と、第二の端面226とを有する。第1の開口部230および第2の開口部232を有する長方形のギアチャネル(破線228で示す)は、ギアトラック80を通って延在する。円弧状チャネル234は、円筒ギアヘッド76の収容に必要な半径を有し、上面220を横断して伸長し、上面222を通ってギアチャネル228内に延在するギアウィンドウ236を形成する。ギアトラック80の幅238は、側方部材36a内のギア開口部126の幅よりも段階的に狭くなる(図3Aも参照のこと)。
【0037】
図6Bは、図6Aにおいて矢視240で示されるギアトラック80の端面図250であり、ギアチャネル228および円弧状チャネル234をさらに示す図である。ギアトラック80は、側方部材36a内のギア開口部126の高さよりも段階的に低くなる深さ252を有する(図3Aを参照のこと)。図6Bは、図6Aにおいて矢視242で示されるギアトラック80の側面図260である。
【0038】
図7は、ギアトラック80とギアプレート72との関係を示す上面図270である。ギアプレート72は、ギアプレート72を第一の開口部230を経てギアチャネル228内に摺動可能に挿入できるように、ギアトラック80の幅274よりも段階的に狭くなる幅272を有する。ギアプレート72がギアトラック80内に挿入されるとき、傾斜チャネル172および線状歯176はギアウィンドウ236を経て露出される。
【0039】
図8Aは、ギアプレート72と、円筒ギアヘッド74と、ギアトラック80との関係を示す上面図280である。ギアプレート72は、ガイドトラック80に摺動可能に挿入されたものとして示される。円筒ギアヘッド74は、円弧状チャネル234内に配置されたものとして示され、円筒ギアヘッド74の傾斜チャネルおよび線状歯は、ギアプレート72の傾斜チャネル172および線状歯176と摺動可能に嵌合され、これらとインターロックされる。ピストンロッド78を伸長することによって円筒ギアヘッド74が方向92に移動されるとき、ギアプレート72は、ギアトラック80から外側の方向94に伸長する(下記、図9Bも参照のこと)。ピストンロッド78を引き込むことによって円筒ギアヘッド74が方向96に移動されるとき、ギアプレート72は、ギアトラック80への方向98に引き込む(下記、図9Aも参照のこと)。
【0040】
図8Bは、図8Aにおいて矢視282によって示されるギアプレート72、円筒ギアヘッド74、およびガイドトラック80の側面図290である。円筒ギアヘッド74は、表面202が円弧状チャネル234内に位置するように配置される。円筒ギアヘッド74の傾斜チャネル204および歯206は、ギアウィンドウ236を通って延在し、ギアチャネル228内に位置するギアプレート72の傾斜チャネル172および線状歯176をインターロックする。図8Cは、図8Aにおいて矢視284で示される端面図300であり、ギアプレート72と、円筒ギアヘッド74と、ガイドトラック80との関係をさらに示す図である。
【0041】
図9Aは、ギアトラック80内に完全に引き込んだ位置にあるギアプレート72を示す上面図310であり、ライナープレート32aは、横断部材36aに対して引き込まれている。明確にするため、円筒ギアヘッド74は図示していない。傾斜チャネル172および線状歯176は、ギアウィンドウ236を介して認識できる。ライナープレート32aは、ライナープレート32aを通ってギアプレート72内に延在する複数の締結具128によってギアプレート72に連結されたものとして示される。一実施態様では、締結具128は、ライナープレート32aをギアプレート72に螺合する。
【0042】
図9Bは、少なくとも部分的にギアトラック80から伸長させたギアプレート72を示す上面図320であり、ライナープレート32aは、横断部材36aから分離されている。また、円筒ギアヘッド74は図示されず、傾斜チャネル172および線状歯176はギアウィンドウ236を介して認識できる。
【0043】
図10Aは、本発明によるギア駆動アセンブリ332の1つの例示的な実施態様を示す図330である。ギア駆動アセンブリ332は、円筒ギアヘッド74と、シリンダ76と、ピストンロッド78と、円筒状のスリーブ334とを含む。円筒ギアヘッド74およびピストンロッド78は、円筒スリーブ334内に摺動可能に挿入するように構成される。シリンダ76は、封止を行うOリング336とともに円筒スリーブ334に螺合される。円筒スリーブ334の軸に沿ったウィンドウ338は、傾斜チャネル204および線状歯206を部分的に露出させる。空気または油圧フィッティングのようなフィッティング342は、開口部82に螺合されたものとして示される。シリンダ76は、横断部材36aを介して利用できる開口部344をさらに含む。
【0044】
ギア駆動アセンブリ332は、ウィンドウ338がギアスロット126と交差して、傾斜チャネル204および線状歯206がギアスロット126内に露出するように、円筒ギアシャフト134(破線で示す)内に摺動可能に挿入するように構成される。ギアトラック80およびギアプレート72(図示せず)は、ギア駆動アセンブリ332が円筒ギアシャフト134内に摺動可能に挿入されたときに、円筒ギアヘッド74の傾斜チャネル204および線状歯206が、ギアプレート72の傾斜チャネル172および線状歯176と摺動可能に嵌合して、これらをインターロックするように、最初にギアスロット126内に摺動可能に挿入される。
【0045】
一実施態様では、キー340は、円筒ギアヘッド74に連結され、円筒スリーブ334内のキースロット342に架かる。キー340は、円筒ギアヘッド74円筒スリーブ334内で回転しないようにする。キー340およびキースロット342は互いに、円筒スリーブ334内の円筒ギアヘッド74の最大伸長および引き込みも制御する。したがって、一実施態様では、キー340を調整して、モールドキャビティ46の内部に向かうライナープレート32aの伸長距離を制御することができる。図10Aは、図10Bに示されるように、円筒シャフト334の上面図350であり、キー340およびキースロット342をさらに示す図である。
【0046】
図11Aは、2つのコンクリートブロックを形成するための本発明のモールドアセンブリ360の1つの例示的な実施態様を示す上面図である。モールドアセンブリ360は、一対のモールドボックス42aおよび42bを形成するように、互いに連結した、側方部材34aおよび34bと、横断部材36a〜36cとを有するモールドフレーム361を含む。モールドボックス42aは、モールドキャビティ46aを形成するように構成された、可動ライナープレート32a〜32dと、対応する着脱可能なライナー面33a〜33dとを含む。モールドボックス42bは、モールドキャビティ46bを形成するように構成された、可動ライナープレート32e〜32hと、対応する着脱可能なライナー面33e〜33hとを含む。
【0047】
各可動ライナープレートは、50a〜50hで示される隣接したモールドフレーム部材に対して内部的に位置する、関連するギア駆動アセンブリを有する。各可動ライナープレートは、72a〜72hで示される対応するギアプレートとともに、伸長位置が示される。下述するように、可動ライナープレート32cおよび32eは、ギア駆動アセンブリ50c/eを、上を向いた対応する複数の傾斜チャネルを有するギアプレート72e、および下を向いた対応する複数の傾斜チャネルを有するギアプレート72cと共有する。
【0048】
図11Bは、ギア駆動アセンブリ50c/eのような本発明によるギア駆動アセンブリを示す図である。図11Bは、図11Aの横断部材36cを断面A−Aの方向から見たギア駆動アセンブリ50c/eの図である。ギア駆動アセンブリ50c/eは、対向する表面上に傾斜チャネル204cおよび204eを有する単一の円筒ギアヘッド76c/eを含む。円筒ギアヘッド76c/eは、傾斜チャネル204cおよび204eが、ギアプレート72cおよび72eの傾斜チャネル172cおよび172eをそれぞれ摺動可能にインターロックするように、ギアトラック80cおよび80dの円弧状チャネル234cおよび234eに嵌合する。
【0049】
傾斜チャネル172cと204c、および172eと204eは互いに対向し、円筒ギアヘッド76c/eが(例えば、図11Bから外へ)伸長されたときに、ギアプレート72cがモールドキャビティ46aの内部に向かう方向372に移動し、ギアプレート72eがモールドキャビティ46bの内部に向かう方向374に移動するように構成される。同様に、円筒ギアヘッド76c/eが(例えば、図11Bの方に)引き込まれたときに、ギアプレート72cがモールドキャビティ46aの内部から離れる方向376に移動し、ギアプレート72eがモールドキャビティ378の内部から離れる方向378に移動する。
また、円筒ギアヘッド76c/eおよびギアプレート72cおよび72cは、任意の好適な形状とすることが可能である。
【0050】
図12は、本発明によるモールドアセンブリ430の1つの例示的な実施態様の一部を示す斜視図である。モールドアセンブリは、複数のコンクリートブロックを同時に成形するための可動ライナープレート432a〜432lを含む。モールドアセンブリ430は、側方部材434aおよび434b、ならびに横断部材436aおよび436bを有する駆動システムアセンブリ431を含む。説明の便宜上、側方部材434aを破線で示す。モールドアセンブリ430は、分割プレート437a〜437gをさらに含む。
【0051】
可動ライナープレート432a〜432l、および分割プレート437a〜437gは、モールドキャビティ446a〜446fを形成し、各モールドキャビティは、コンクリートブロックを形成するように構成される。したがって、図示した実施態様では、モールドアセンブリ430は、6つのブロックを同時に形成するように構成される。しかし、モールドアセンブリ430を、6つ以外の多数のコンクリートブロックを同時に形成するように容易に修正できることは明らかである。
【0052】
図示した実施態様では、側方部材434aおよび434bは、可動ライナープレート432a〜432f、および432g〜432lをそれぞれ移動させるための、対応するギア駆動アセンブリをそれぞれ有する。説明の便宜上、側方部材434aおよび対応する可動ライナープレート432a〜432gに関連するギア駆動アセンブリ450のみを示す。ギア駆動アセンブリ450は、対応する可動ライナープレート432a〜432fにそれぞれ選択的に連結された第一のギア要素472a〜472fと、第二のギア要素474とを含む。図示した実施態様では、第一のギア要素472a〜472fおよび第二のギア要素474は、円筒形状のものとして示される。しかし、任意の好適な形状を用いることができる。
【0053】
第二のギア要素474は、ピストンロッド478を経てシリンダピストン(図示せず)に選択的に連結される。以下に詳述する一実施態様(図12を参照のこと)では、第二のギア要素474は、単一の構成要素を形成するように、シリンダピストンと一体である。
【0054】
図示した実施態様では、第一のギア要素472a〜472bのそれぞれは、第二のギア要素474上の複数の実質的に並列する傾斜チャネル486を摺動可能に嵌合して、これをインターロックする、複数の実質的に並列する傾斜チャネル484をさらに含む。第二のギア要素474が矢印492で示される方向に移動するとき、可動ライナープレート432a〜432fのそれぞれは、矢印494で示される方向に移動する。同様に、第二のギア要素474が矢印496で示される方向に移動するとき、可動ライナープレート432a〜432fのそれぞれは、矢印498で示される方向に移動する。
【0055】
図示した実施態様では、第一のギア要素432a〜432fそれぞれの上の傾斜チャネル484と、傾斜チャネル486は、同じ角度である。したがって、第二のギア要素474が方向492および496に移動するとき、可動ライナープレート432a〜432fのそれぞれは、方向494および498に同じ距離移動する。一実施態様では、第二のギア要素474は、各群が第一のギア要素472a〜472fのうちの異なる1つに対応する、複数群の実質的に並列する傾斜チャネルを含む。一実施態様では、第二のギア要素474の方向492および496へのそれぞれの移動に応じて、可動ライナープレート432a〜432fのそれぞれが、方向494および498に異なる距離移動するように、各群の傾斜チャネルおよび対応する第一のギア要素が異なる角度を有する。
【0056】
図13は、本発明によるギア駆動アセンブリ500、および対応する可動ライナープレート502および着脱可能なライナー面504を示す斜視図である。説明の便宜上、側方部材および横断部材を含むフレームアセンブリは図示していない。ギア駆動アセンブリ500は、シリンダ本体507を有する両ロッド端複動式空気圧シリンダピストン506と、第一のロッド端510および第二のロッド端512を備えた中空ピストンロッド508とを含む。ギア駆動アセンブリ500は、それぞれが可動ライナープレート502に選択的に連結された一対の第一のギア要素514aおよび514bをさらに含み、第一のギア要素514aおよび514bのそれぞれは、複数の実質的に並列する傾斜チャネル516aおよび516bを有する。
【0057】
図示した実施態様では、シリンダピストン506のシリンダ本体507は、傾斜チャネル516aおよび516bと嵌合して、これらをインターロックするように構成された複数の実質的に並列する傾斜チャネル518を含む。一実施態様では、シリンダ本体507は、傾斜チャネル518を有するシリンダスリーブに摺動可能に挿入し、これに連結するように構成される。
【0058】
一実施態様では、シリンダピストン506およびピストンロッド508は、横断部材36aの駆動シャフト134のようなフレーム部材の駆動シャフト内に位置し、側方部材34bのようなフレーム部材に連結され、これを通って延在するロッド端510と、側方部材34aのようなフレーム部材に連結され、これを通って延在するロッド端512とを備える。第一のロッド端510および第二のロッド端512は、圧縮空気を受け取り、これを供給して複動式シリンダピストン506を駆動する。第一および第二のロッド端510および512を経て側方部材34aおよび34bに固定されるピストンロッド508によって、シリンダピストン506は、第一および第二のロッド端510および512を経て受け取った圧縮空気に応じて、矢印520および522で示される方向にピストンロッド508の軸に沿って移動する。
【0059】
圧縮空気が第二のロッド端512を経て受け取られ、第一のロッド端510を経て排出されるとき、シリンダピストン506が駆動シャフト134のような駆動シャフト内を522の方向に移動して、第一のギア要素514aおよび516bと、対応するライナープレート502と、ライナー面504とを矢印524の方向に移動させる。これとは逆に、圧縮空気が第一のロッド端510を経て受け取られ、第二のロッド端512を経て排出されるとき、シリンダピストン506が駆動シャフト134のような駆動シャフト内を520の方向に移動して、第一のギア要素514aおよび516bと、対応するライナープレート502と、ライナー面504とを矢印526の方向に移動させる。
【0060】
図示した実施態様では、シリンダピストン506、第一のギア要素514aおよび514bは、実質的に円筒形状のものとして示される。しかし、任意の好適な形状を用いることができる。さらにまた、図示した実施態様では、シリンダピストン506は、両ロッド端複動式シリンダである。一実施態様では、シリンダピストン506は、側方部材34bのようなフレーム部材に連結された片ロッド端510のみを有する、片ロッド端複動式シリンダである。当該の一実施態様では、圧縮空気は、片ロッド端510およびギアシャフト134を経て側方部材34aを介してシリンダピストン506に作製された柔軟な空気接続を経て、シリンダピストンに提供される。加えて、シリンダピストン506は、油圧シリンダを備える。
【0061】
図14は、本発明の一実施態様による駆動アセンブリ550を有する(図12に示されるような)モールドアセンブリ430の一部の上面図である。駆動アセンブリ550は、開口部433のような側方部材434a内の開口部を経て、対応するライナープレート432a〜432fに選択的に連結された第一の駆動要素572a〜572fを含む。第一の駆動要素572a〜572fのそれぞれは、マスターバー573にさらに連結される。駆動アセンブリ550は、複動式シリンダ607を有する両ロッド端油圧ピストンアセンブリ606と、第一のロッド端610および第二のロッド端612を有する中空ピストンロッド608とをさらに含む。第一および第二のロッド端610および612は固定されており、側方部材434aに連結されて駆動アセンブリ550を収容する着脱可能な筐体560を通って延在する。第一および第二のロッド端610および612は、ライン622aおよび622bを経て外部油圧システム624に連結し、中空ピストンロッド608を経て複動式シリンダ607と作動油を送受するように構成された、油圧フィッティング620にそれぞれ接続される。
【0062】
一実施態様では、図示さるように、第一の駆動要素572bおよび572eは、第二の駆動要素を形成する複数の実質的に並列する傾斜チャネル618を摺動可能にインターロックする、複数の実質的に並列する傾斜チャネル616を含む。一実施態様では、図12に示されるように、傾斜チャネル618は、複動式シリンダ607が第二の駆動要素を形成するように、油圧ピストンアセンブリ606の複動式シリンダ607上に形成される。他の実施態様では、図15A〜15Cで後述するように、第二の駆動要素は、複動式シリンダ607から分離され、これに操作可能に連結される。
【0063】
第二のロッド端612からフィッティング620を経て複動式シリンダ607および中空ピストンロッド608に作動油が送られるとき、作動油は、第一のロッド端610から排出され、複動式シリンダ607および傾斜チャネル618を第二のロッド端612に向かってピストンロッド608に沿って移動させる。複動式シリンダ607が第二のロッド端612の方へ移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、第一の駆動要素572bおよび572e、および対応するライナープレート432bおよび432eを、それぞれモールドキャビティ446bおよび446eの内部に向かって駆動する。さらに、第一の駆動要素572a〜572fのそれぞれが、マスターバー573に連結されているので、第一の駆動要素572bおよび572eのモールドキャビティ446および446eを内部へ向かって駆動することによって、第一の駆動要素572a、572c、572dおよび572f、および対応するライナープレート432a、432c、432dおよび432eも、モールドキャビティ446a、446c、446dおよび446fの内部に向かってそれぞれ移動する。これとは逆に、第一のロッド端610からフィッティング620を経て複動式シリンダ607および中空ピストンロッド608に作動油が送られると、複動式シリンダ607は第一のロッド端610に向かって移動し、ライナープレート432は対応するモールドキャビティ446の内部から離れるように移動する。
【0064】
一実施態様では、駆動アセンブリ550は、サポートシャフト626aおよび626bのようなサポートシャフト626をさらに含み、これらは着脱可能な筐体560と側方部材434aとの間に連結され、マスターバー573を通って延在する。複動式シリンダ607が第一および第二のロッド端610および612から作動油を送る/排出するとき、マスターバー573は、サポートシャフト626に沿って前後に移動する。サポートシャフト626aおよび626bは、モールドアセンブリ430の固定要素に連結されているので、これらのシャフトは、モールドキャビティ446に向かって、およびこれから離れるように移動するとき、ライナープレート432、駆動要素572、およびマスターバー573をサポートし、剛性を提供する。
【0065】
一実施態様では、駆動アセンブリ550は、ライン630を経て外部圧縮空気システム632に連結し、圧縮空気を筐体560に供給するように構成された、空気フィッティング628をさらに含む。着脱可能な筐体560が空気フィッティング628を経て圧縮空気を受け取ることによって、駆動要素572が側方部材434aを通って延在する開口部433のようなあらゆる非密封開口部を通って、空気が筐体560の外部に連続的に“押し出される”ように、筐体560の内部空気圧が外部空気圧に対して正になる。正の空気圧を保持し、当該の非密封開口部を通じて空気を押し出すことによって、筐体560からの塵埃、細片、他の不要な混入物侵入の発生、および駆動アセンブリ550の汚染が低減される。
【0066】
第一および第二のロッド端部610および612は、ライン622aおよび622bを経て外部油圧システム624に連結し、中空ピストンロッド608を経て複動式シリンダ607と作動油を送受するように構成された、油圧フィッティング620にそれぞれ接続される。
【0067】
図15Aは、本発明による駆動アセンブリ550の一実施態様の一部を示す上面図である。駆動アセンブリ550は、着脱可能な筐体560に連結され、これを通って延在する第一および第二のロッド端610および612を備えた複動式シリンダ607と、中空ピストンロッド608とを備えた両ロッド端油圧ピストンアセンブリ606を含む。
【0068】
図示されるように、複動式シリンダ607は、第二のギア要素640内の機械加工開口部641に摺動可能に嵌合され、中空ピストンロッド608は、着脱可能なエンドキャップ642を通って延在する。一実施態様では、エンドキャップ646は、複動式シリンダ607が第二の駆動要素640に対して固定されたままになるように、エンドキャップ646が複動式シリンダ607に密着して固定するように、機械加工開口部641内に螺入される。第二の駆動要素640は、複動式シリンダ607の一体部分である傾斜チャネルの代わりに、複数の実質的に並列する傾斜チャネル618を含む。図14を参照する。第二のギア要素640の傾斜チャネル618は、第一のギア要素572bおよび572eの傾斜チャネル616をインターロックするように構成される。
【0069】
第二のギア要素640は、筐体560に載置された線状軸受ブロック646に摺動可能に連結されたガイドレール644をさらに含む。図14に関して上述したように、第一および第二のロッド端610および612を経て作動油を複動式シリンダ607と送受することによって、複動式シリンダ607がピストンロッド608に沿って移動する。複動式シリンダ607が、エンドキャップ642によって第二のギア要素640の機械加工シャフト641内の適所に“ロック”されると、第二のギア要素640は、複動式シリンダ607とともに中空ピストンロッド608に沿って移動する。第二の駆動要素640が中空ピストンロッド608に沿って移動するとき、線状軸受ブロック646は、ガイドレール644をガイドおよび固定し、それによって、第二の駆動要素640をガイドおよび固定し、また中空ピストンロッド608に垂直な第二の駆動要素640の不要な動きを低減する。
【0070】
図15Bは、図15Aによって示される駆動アセンブリ550の一部を断面A−Aから見た横方向断面図である。ガイドレール644は、第二の駆動要素640が複動式シリンダ607によってピストンロッド608に沿って移動されるとき、線状軸受トラック650に摺動可能に嵌合され、軸受652に架かる。一実施態様では、線状軸受ブロック646bは、ボルト648を介して筐体560に連結される。
【0071】
図15Cは、図15Aの駆動アセンブリ550の一部を断面B−Bから見た長手方向断面図であり、複動式シリンダ607は、エンドキャップ642aおよび642bによって駆動要素640のシャフト641内に固定されたものとして示される。一実施態様では、エンドキャップ642aおよび642bは、複動式シリンダ607の各端部に密着するように、第二の駆動要素640の端部に螺入される。中空ピストンロッド608は、エンドキャップ642aおよび642bを通って延在し、筐体560に連結され、これを通って延在する第一および第二のロッド端部610および612を有する。分割器654は、ピストンロッド608に連結され、複動式シリンダ607を第一のチャンバ656および第二のチャンバ658に分割する。第一のポート660および第二のポート662によって、作動油は、第一および第二のロッド端610および612、および関連する油圧フィッティング620をそれぞれ経て、第一のチャンバ656および第二のチャンバ658に給送および排出される。
【0072】
作動油が第一のロッド端610および第一のポート660を経て第一のチャンバ656に給送されるとき、複動式シリンダは607は、第一のロッド端610に向かって中空ピストンロッド608に沿って移動し、作動油は、第二のポート662および第二のロッド端612を経て第二のチャンバ658から排出される。複動式シリンダ607がエンドキャップ642aおよび642bによってシャフト641内に固定されるので、第二の駆動要素640、従って、傾斜チャネル618は第一のロッド端610に向かって移動する。同様に、作動油が第二のロッド端612および第二のポート662を経て第二のチャンバ658に給送されるとき、複動式シリンダは607は、第二のロッド端612に向かって中空ピストンロッド608に沿って移動し、作動油は、第一のポート660および第一のロッド端610を経て第一のチャンバ656から排出される。
【0073】
図16は、図14に示されるように、駆動アセンブリ550の一部の側面図であり、ライナープレート432aのような代表的なライナープレートと、対応する着脱可能なライナー面400とを示す。ライナープレート432aは、ボルト締め連結670を経て第二の駆動要素572aに連結され、また、駆動要素572aは、ボルト締め連結672を経てマスターバー573に連結される。ライナー面400の下部は、ボルト締め連結674を経てライナープレート432aに連結される。一実施態様では、図示されるように、ライナープレート432aは、ライナープレート432aの上縁の長さに沿って延びる隆起した“リブ”676を含む。ライナー面400内のチャネル678は、隆起したリブ676と重なり、これをインターロックして、ライナープレート432aとライナー面400との間に“ボルトレス”接続を形成する。当該のインターロック接続は、ライナー面400の領域においてライナー面400の上部をライナープレート432に確実に連結するが、そうでなければ、ライナー面400とライナープレート432aとの間が狭すぎるので、モールドキャビティ446aに面するライナー面400の表面上に認識されるボルトでなければ、これらの間にボルト締め連結を使用できなくなる場合がある。
【0074】
一実施態様では、ライナープレート432は、対応するライナー面400の温度を所望の温度に保持して、硬化プロセス中に、対応するモールドキャビティ446内のコンクリートがライナー面400の表面に固着しないように構成された、加熱器680を含む。一実施態様では、加熱器680は、電気加熱器を備える。
【0075】
図17は、図14のモールドアセンブリ430のような、本発明によるモールドアセンブリの一実施態様を示すブロック図であり、ライナープレート432のような可動ライナープレートの動作を、駆動アセンブリ550のような駆動アセンブリの動作を制御することによって、コンクリートブロックマシン702の動作と同調させるように構成された、制御器700をさらに含む。一実施態様では、図示されるように、制御器700は、プログラマブル論理制御器(Programmable Logic Controller:PLC)を備える。
【0076】
図1に関して上述したように、モールドアセンブリ430は、一般的に複数のボルト締め連結を経て、コンクリートブロックマシン702に選択的に連結される。動作中に、コンクリートブロックマシン702は、最初にモールドボックスアセンブリ430の下にパレット56を配置する。次いで、コンクリート供給ボックス704は、アセンブリ430のモールドキャビティ446のようなモールドキャビティにコンクリートを充填する。次いで、ヘッドシューアセンブリ52がモールドアセンブリ430上に降ろされ、モールドキャビティ446内のコンクリートを油圧的または機械的に加圧し、パレット56が配置された振動テーブルとともに、モールドアセンブリ430を同時に振動させる。加圧および振動の完了後に、形成されたコンクリートブロックがモールドキャビティ446からパレット56上に排出されるように、ヘッドシューアセンブリ52およびパレット56がモールドキャビティ446に対して下げられる。次いで、ヘッドシューアセンブリ52を上昇させて、新しいパレット56をモールドキャビティ446の下の所定位置に移動させる。上述のプロセスは、連続的に繰り返され、当該の繰り返しは、一般的にサイクルと称される。特にモールドアセンブリ430に関しては、当該の各サイクルで6つのコンクリートブロックを生成する。
【0077】
PLC700は、上述のようなコンクリートブロックマシン702の動作に関して、ライナープレート432のモールドキャビティ446への伸長および引き込みを同調させるように構成される。サイクルの開始時に、ライナープレート432は、モールドキャビティ446から完全に引き込まれる。一実施態様では、図14を参照して、駆動アセンブリ550は、近接スイッチ706aおよび706bのような一対のセンサーを含み、マスターバー573の位置を監視し、マスターバー573に連結された可動ライナープレート432の位置を監視する。図14に示されるように、近接スイッチ706aおよび706bは、ライナープレート432がモールドキャビティ446に対して、伸長位置および引き込み位置にあるときを検出するようにそれぞれ構成される。
【0078】
一実施態様では、パレット56がモールドアセンブリ430の下に配置された後に、PLC700は、コンクリート供給ボックス704がコンクリートをモールドキャビティ446に供給する準備ができたことを示す信号708を、コンクリートブロックマシン702から受信する。PLC700は、近接スイッチ706aおよび706bからそれぞれ受信した信号710aおよび710bに基づいて、可動ライナープレート432の位置を確認する。引き込み位置にあるライナープレート432については、PLC700は、ライナー伸長信号712を油圧システム624に送信する。
【0079】
ライナー伸長信号712に応じて、油圧システム624は、ピストンアセンブリ606の第二のロッド端612への作動油の給送を経路622bを経て開始し、また、第一のロッド端610からの作動油の受け取りを経路622aを経て開始する。それによって、複動式シリンダ607は、ライナープレート432をモールドキャビティ446内部に向かって移動させ始める。近接スイッチ706aがマスターバー573を検出したときに、近接スイッチ706aは、ライナープレート432が所望の伸長位置に到達したことを示す信号710aをPLC700に送信する。信号710aに応じて、PLC700は、油圧システム624に、ピストンアセンブリ606への作動油の給送を停止するように信号712を経て命令し、ライナープレート432が伸長されたことを示す信号714をコンクリートブロックマシン702に送信する。
【0080】
信号714に応じて、コンクリート供給ボックス704は、モールドキャビティ446にコンクリートを充填し、ヘッドシューアセンブリ52がモールドアセンブリ430上に降ろされる。コンクリートの加圧および振動の完了後に、コンクリートブロックマシン702は、形成されたコンクリートブロックをモールドキャビティ446から排出する準備ができたことを示す信号716を送信する。信号716に応じて、PLC700は、ライナー引き込み信号718を油圧システム624に送信する。
【0081】
ライナー引き込み信号718に応じて、油圧システム624は、経路622aを経た作動油の、経路622を経た第一のロッド端610への給送を開始し、また、第二のロッド端612からの作動油の受け取りを経路622bを経て開始する。それによって、複動式シリンダ607は、ライナープレート432をモールドキャビティ446の内部から離れるように移動させ始める。近接スイッチ706bがマスターバー573を検出したとき、近接スイッチ706bは、ライナープレート432が所望の引き込み位置に到達したことを示す信号710bをPLC700に送信する。信号710bに応じて、PLC700は、油圧システム624に、ピストンアセンブリ606への作動油の給送を停止するように信号718を経て命令し、ライナープレート432が引き込まれたことを示す信号720をコンクリートブロックマシン702に送信する。
【0082】
信号720に応じて、ヘッドシューアセンブリ52およびパレット56は、形成されたコンクリートブロックをモールドキャビティ446から排出する。コンクリートブロックマシン702は、次いで、ヘッドシューアセンブリ52を引き込んで、新しいパレット56をモールドアセンブリ430の下に配置する。次いで、上述のプロセスが次のサイクルに対して繰り返される。
【0083】
一実施態様では、PLC700は、モールドアセンブリ430への圧縮空気の供給を制御するようにさらに構成される。一実施態様では、PLC700は、コンクリートブロックマシン702およびモールドアセンブリ430が動作して、コンクリートブロックを形成したときを示すステータス信号722を圧縮空気システム630に送信する。動作中に、圧縮空気システム632は、ライン630および空気フィッティング628を経て、圧縮空気をモールドアセンブリ420の筐体560に供給して、ほこり/塵埃および他の細片が駆動アセンブリ550に侵入する可能性を低減する。動作中でないときは、圧縮空気システム632は、モールドアセンブリ430に圧縮空気を供給しない。
【0084】
制御器700の上述の説明は、駆動アセンブリ500のピストンアセンブリ606のような単一のピストンアセンブリだけを用いた駆動アセンブリの制御に関するものであるが、制御器700は、複数のピストンアセンブリを用い、また、近接スイッチ706aおよび706bのような複数対の近接スイッチを用いた駆動アセンブリを制御するように構成することができる。そのような場合、油圧システム624は、ライン622aおよび622bのような一対の油圧ラインを経て各ピストンアセンブリに連結されることになる。加えて、PLC700は、複数の位置信号を受信して、全ての可能なライナープレートが拡張位置にあることを各適用可能な近接スイッチが示したとき、および全ての可能なライナープレートが引き込み位置にあることを各適用可能な近接スイッチが示したときにのみ、それぞれの信号によって、モールドキャビティにコンクリートを充填し、ブロックを形成して排出することができる。
【0085】
図18A〜18Cは、図15A〜15Cに示されるような、駆動アセンブリ550の別の実施態様の一部を示す図である。図18Aは、第二のギア要素640の上面図であり、第二のギア要素640は、ピストンアセンブリ606のようなピストンアセンブリの代わりに、ねじ駆動システム806によって駆動される。ねじ駆動システム806は、アクメ型またはボール型ねじのようなねじ808と、電気モーター810とを含む。ねじ808は、第二のギア要素640を介して長手方向に伸長する対応するねじ付きシャフト812を介してねじ切りされる。ねじ808は、第一の端部で第一の軸受アセンブリ814aに連結され、また、第二の端部で第二の軸受アセンブリ814bを介してモーター810に連結される。モーター810は、モーターマウント824を経て筐体560に、および/またはモールドアセンブリの横断部材434aのような側方/横断部材に選択的に連結される。
【0086】
図15Aに記載されたものに類似した形態において、第二のギア要素640は、図14に示されるように、第一のギア要素572bおよび572eの傾斜チャネル616を摺動可能にインターロックして、これと嵌合する複数の傾斜チャネル618を含む。第二のギア要素640は、線状軸受ブロック646に連結されるので、モーター810が駆動されてねじ808を反時計回りの方向816に回転させたときに、第二のギア要素640は、線状ベアリングトラック650に沿って方向818に駆動される。第二のギア要素640が方向818に移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、図12および14に示されるライナープレート432a〜432fのようなライナープレートを、モールドキャビティ446a〜446fの内部に向かって伸長する。
【0087】
モーター810が駆動されて、ねじ808を時計回りの方向820に回転させるとき、第二のギア要素640は、線状ベアリングトラック650に沿って方向822に駆動される。第二のギア要素640が方向822に移動するとき、傾斜チャネル618は、傾斜チャネル616と相互に作用して、図12および14に示されるライナープレート432a〜432fのようなライナープレートを、モールドキャビティ446a〜446fの内部から離れるように引き込む。一実施態様では、ライナープレートがモールドキャビティの内部に向かって伸長する、およびこれから離れるように引き込む距離は、図14に示されるように、一対の近接スイッチ706aおよび706bに基づいて制御される。別の実施態様では、ライナープレートの移動距離は、モーター810によって駆動されるねじ808の回転数に基づいて制御される。
【0088】
図18Bおよび18Cは、図18Aに示されるような駆動アセンブリ550をそれぞれ断面A−AおよびB−Bから見た横方向断面図および長手方向断面図である。筐体560の外部に位置するものとして示されているが、別の実施態様では、モーター810は筐体560内に実装される。
【0089】
上述のように、コンクリートブロックは、広義にはコンクリートメーソンリユニット(CMU)とも称され、例えば、パティオブロック、舗装材料、軽量ブロック、グレーブロック、建築ユニット、および土留め壁ブロックのような多種多様なブロックを包含する。コンクリートブロック、メーソンリブロック、およびコンクリートメーソンリユニットという用語は、本願明細書において代替可能に用いられ、本発明のアセンブリ、システム、および方法による形成に好適な全ての種類のコンクリートメーソンリユニットを含むことを意図するものである。さらに、本願明細書において、主にコンクリート、ドライキャストコンクリート、または他のコンクリート混合物を含み、これを用いたものとして記述されているが、本発明のシステム、方法、およびコンクリートメーソンリユニットは、当該の材料に制限されるものではなく、当該のブロックの形成に好適なあらゆる材料の使用を包含することを意図するものである。
【0090】
図19Aおよび19Bは、関連する可動ライナープレート852(破線で示され、図1および2の可動ライナープレート32に類似する)を移動させるための、本発明による駆動アセンブリ850の一実施態様のそれぞれ斜視図および上面図である。図を簡素化するために、可動ライナープレート852の一部であるモールドアセンブリの側方および横断部材(図1のモールドアセンブリの側方および横断部材34a、34bおよび36a、36bに類似する)は図示していない。
【0091】
駆動アセンブリ850は、第一の駆動要素854と、第二の駆動要素858を含むアクチュエータアセンブリ856とを含む。一実施態様では、第二の駆動要素858は、x軸870について非ゼロ角度(θ)862の線状レール860を含む。一実施態様では、第一の駆動要素854は、第一の端部866に隣接したチャネル864を含み、チャネル864は、可動ライナープレート852に対して実質的に非ゼロ角度(θ)862であり、第一の駆動要素854が、可動ライナープレート852および第二の駆動要素858に対して実質的に直角であるように、線状レール860を摺動可能に受け、これをインターロックするように構成される。第一の駆動要素854の第二の端部868は、可動ライナープレート852に選択的に連結される。
【0092】
アクチュエータアセンブリ856は、第二の駆動要素858を実質的に線形にx軸870に沿って移動させるように構成される。第一の駆動要素854は、実質的にy軸872に沿った動作が制限される。一実施態様では、第一の駆動要素854は、上述の図2によって示されるギアトラック80に類似した、モールドアセンブリの側方または横断部材(図示せず)を介してガイドトラックを通って延在する。一実施態様では、可動ライナープレート852は、モールドアセンブリの側方または横断部材(図示せず)に伸長し、y軸872に沿った可動ライナープレート852の動作をガイドおよび制限する、ガイドポスト870aおよび870bのような(図2のガイドポスト88a〜88dに類似する)1つ以上のガイドポストを含む。
【0093】
動作中に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第一の方向874に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って移動し、それによって、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って第一の方向に876を移動させる。同様に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第二の方向878に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って移動し、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って方向880に移動させる。第一の駆動要素854のy軸872に沿った動作の程度は、角度(θ)862に比例する(すなわち、角度(θ)862が大きくなるほど、第二の駆動要素858のx軸870に沿った動作に対する、第一の駆動要素854のy軸872に沿った動作の割合が大きくなる)ことに留意されたい。
【0094】
一実施態様では、図19Aおよび19Bに示されるように、アクチュエータアセンブリ856は、図15A〜15Cで図示および説明した両ロッド端ピストンアセンブリ606に類似した、両ロッド端ピストンアセンブリ882を含む。両ロッド端ピストンアセンブリ882は、第二の駆動要素854内に選択的に連結され、第一および第二の中空ロッド端886および888を有する中空ピストン体884を含む。図15A〜15Cの両ロッド端部アセンブリ606に関して上述したように、油圧媒体は、中空ピストン体884との間を給送されて、第二の駆動要素858をx軸870に沿って第一および第二の方向876および878に駆動する。一実施態様では、アクチュエータアセンブリ856は、図18A〜18Cで図示および説明したねじ駆動システム806に類似した、ねじ駆動システム(図示せず)を備えて、第二の駆動要素858をx軸870に沿って第一および第二の方向876および878に駆動する。
【0095】
図20は、本発明による駆動アセンブリ900の一実施態様の斜視図である。駆動アセンブリ900は、上述の図19Aおよび19Bで図示および説明した駆動アセンブリ850に類似する。但し、第二の駆動要素858が線状レール860の代わりに曲線レール902を含み、第一のギア要素854がチャネル864の代わりに一対のローラ要素904aおよび904bを含むことを除く。ローラ要素904aおよび904bは、互いに隔設され、曲線レール902に接触し、これに架かるように構成される。一実施態様では、曲線のレール902は、事実上「蛇行」しており、可動ライナープレート852からの距離が、曲線レール902の部分908および910よりも離れている部分906を有する。駆動アセンブリ850と同様に、可動ライナープレート852および第一のギア要素854はy軸872に沿った動作が制限され、第二のギア要素858はx軸870に沿った動作が制限される。
【0096】
動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をx軸870に沿って前後に駆動し、第一の駆動要素854および可動ライナープレート852を、y軸872に沿って伸長および引き込むように構成される。例えば、ローラ要素904aおよび904bが部分908から部分906まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第一の方向912に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第一の方向914に移動する(すなわち、関連するモールドキャビティから“引き込む”)。同様に、ローラ要素904aおよび904bが部分906から部分910まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第一の方向912に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第二の方向916に移動する(すなわち、関連するモールドキャビティから“伸長する”)。
【0097】
同様に、ローラ要素904aおよび904bが部分910から部分906まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第二の方向918に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第一の方向914に移動する(すなわち、関連するモールドキャビティから“引き込む”)。同様に、ローラ要素904aおよび904bが部分906から部分908まで曲線レール902に沿って移動するように、アクチュエータアセンブリ856が、第二のギア要素858をx軸870に沿って第二の方向918に駆動するとき、第一のギア要素854および可動ライナープレート852は、y軸872に沿って第二の方向916に移動する(すなわち、関連するモールドキャビティから“伸長する”)。
【0098】
図21は、本発明による駆動アセンブリ950の一実施態様を示す上面図である。駆動アセンブリ950は、上述の図19Aおよび19Bで図示および説明した駆動アセンブリ850に類似する。但し、第二の駆動要素858がレール要素(例えばライナーレール860および曲線のレール902)を含まず、第一の駆動要素が、第一の端部952で、第一のピン954を経て可動ライナープレート852に回動可能に連結され、また、第二の端部956で、第二のピン958を経て第二のギア要素858に回動可能に連結されることを除く。第二のギア要素858はy軸872に沿った動作が制限され、可動ライナープレート852はx軸870に沿った動作が制限される。
【0099】
図21に示されるように、実線は、可動ライナープレート852が伸長位置960にあるときの駆動アセンブリ950を示し、破線は、可動ライナープレート852が引き込み位置962にあるときの駆動アセンブリ950を示す。動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をx軸870に沿って前後に駆動し、第一の駆動要素854が第一および第二のピン954および958の周囲を回転するときに、第一の駆動要素854が可動ライナープレート852をy軸872に沿って前後に駆動するように構成される。
【0100】
例えば、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までy軸968に沿って方向966に距離D1 964駆動するとき、第一の駆動要素854は、破線で示された位置まで第一および第二のピン954および958の周囲を回転し、可動ライナープレート852を伸長位置960から引き込み位置962までx軸974に沿って方向972に距離D2 970引き寄せる。同様に、アクチュエータアセンブリ856が、第二の駆動要素858を引き込み位置から伸長位置までy軸968に沿って方向976に距離D1 964駆動するとき、第一の駆動要素854は、実線で示された位置まで第一および第二のピン954および958の周囲を回転し、可動ライナープレート852を引き込み位置962から伸長位置960までx軸974に沿って方向978に距離D2 970押す。一実施態様では、停止要素980は、アクチュエータアセンブリ856が、第一の駆動要素854を実質的に完全に拡張した位置を越えて移動させないようにする。
【0101】
図22は、同時に2つの可動ライナープレートを移動するための本発明による駆動アセンブリ1000の上面図である。駆動アセンブリ1000は、上述の図21で図示および説明した駆動アセンブリ950に類似する。但し、アクチュエータアセンブリ856が、モールドアセンブリの別個のモールドキャビティの対応する可動ライナープレート852aおよび852bにそれぞれ連結された、一対の第一の駆動要素854aおよび854bを含むことを除く(上述の図11Aで図示および説明したモールドアセンブリ360のモールドキャビティ46aおよび46bの可動ライナープレート32cおよび32eに類似する)。第一の駆動要素854aは、ピン958bを介して可動ライナープレート852aに、また、ピン958aを経て第二の駆動要素858に回動可能に連結され、第一の駆動要素854bは、ピン954bを介して可動ライナープレート852bに、また、ピン958bを経て第二の駆動要素858に回動可能に連結される。第二の駆動要素858はy軸872に沿った移動が制限され、可動ライナープレート852aおよび852bはx軸870に沿った移動が制限される。
【0102】
図22に示されるように、実線は、可動ライナープレート852aおよび852bがそれぞれの伸長位置960aおよび960bにあるときの駆動アセンブリ1000を示し、破線は、可動ライナープレート852aおよび852bがそれぞれの引き込み位置962aおよび962bにあるときの駆動アセンブリ1000を示す。動作中に、アクチュエータアセンブリ856は、第二の駆動要素858をy軸872に沿って前後に駆動し、可動ライナープレート852aおよび852bが、それぞれの第一の駆動要素854aおよび854bを経てx軸870に沿って前後に駆動するように構成される。
【0103】
例えば、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までx軸870に沿って方向966に距離D1 964駆動するとき、第一の駆動要素854aは、破線で示された位置までピン954aおよび958aの周囲を回転し、可動ライナープレート852aを伸長位置960aから引き込み位置962aまでy軸872に沿って方向972aに距離D2 970a押す。同時に、第一の駆動要素854bが、破線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852bを伸長位置960bから引き込み位置962bまでy軸872に沿って方向972bに距離D2 970b押す。
【0104】
逆に、アクチュエータアセンブリ856が、第二の駆動要素858を伸長位置から引き込み位置までx軸870に沿って方向976に距離D1 964駆動するとき、第一の駆動要素854aは、実線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852aを引き込み位置962aから伸長位置960aまでy軸872に沿って方向978aに距離D2 970a押す。同時に、第一の駆動要素854bが、実線で示された位置までピン954bおよび958bの周囲を回転し、可動ライナープレート852bを伸長位置962bから引き込み位置960bまでy軸872に沿って方向978bに距離D2 970b押す。
【0105】
図23は、同時に2つの可動ライナープレートを移動するための本発明による駆動アセンブリ1050の一実施態様の斜視図である。駆動アセンブリ1050は、上述の図19A、19B、および20で図示および説明した駆動アセンブリ850および900に類似する。但し、アクチュエータアセンブリ856が、モールドアセンブリの別個のモールドキャビティの対応する可動ライナープレート852aおよび852bに、第一の端部1055aおよび第二の端部1055bでそれぞれ連結された、一対の第三の駆動要素1054aおよび1054bを含むことを除く(上述の図11Aで図示および説明したモールドアセンブリ360のモールドキャビティ46aおよび46bの可動ライナープレート32cおよび32eに類似する)。
【0106】
図示されるように、第一の駆動要素854は、線状レール860を摺動可能にインターロックし、これに沿って移動するように構成され、x軸872に対して非ゼロ角度(θ)862にあるチャネル864を含む。第一の駆動要素854は、第一組の傾斜チャネル1056aと、第一の駆動要素854の対向側上の第二組の傾斜チャネル1056bとをさらに含む。第三の駆動要素1054aおよび1054bは、第一の駆動要素854の傾斜チャネル1056aおよび1056bを摺動可能にインターロックするようにそれぞれ構成された、複数組の傾斜チャネル1058aおよび1058bをそれぞれ含む。傾斜チャネル1056a、1056b、1058a、および1058bは、図5A〜9Bを参照して上述したものに類似する。一実施態様では、図23に示されるように、第一の駆動要素854は、可動ライナープレート852aおよび852bと、それらが対応するモールドキャビティとの間に配置される(例えば、上述の図11Aで図示および説明したように、可動ライナープレート32cおよび32eと、対応するモールドキャビティ46aおよび46bとの間の横断部材36cの内側)。
【0107】
動作中に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第一の方向874に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って架かり、第一の駆動要素854をy軸872に沿って第一の方向876に移動させる。また、傾斜チャネル1056aおよび1058aと、傾斜チャネル1056bおよび1058bとの間の相互作用によって、第三のギア要素1054aおよび1054b、および対応する可動ライナープレート852aおよび852bを、それぞれのモールドキャビティの内部に向かってx軸870に沿って方向1060aおよび1060bに移動させる。
【0108】
逆に、アクチュエータアセンブリ856が第二の駆動要素858をx軸870に沿って第二の方向878に駆動するとき、第一の駆動要素854のチャネル864は、線状レール860に沿って架かり、第一の駆動要素854をy軸872に沿って第二の方向880に移動させる。また、傾斜チャネル1056aおよび1058aと、傾斜チャネル1056bおよび1058bとの間の相互作用によって、第三のギア要素1054aおよび1054b、および対応する可動ライナープレート852aおよび852bを、それぞれのモールドキャビティの内部から離れるようにx軸870に沿って方向1062aおよび1062bに移動させる。
【0109】
特定の実施態様を例示および説明したが、当業者は、様々な代替物および/または同等物を、本発明の範囲を逸脱しない範囲で、図面とともに記載された特定の実施態様の代用とすることが可能であるものと理解されよう。本出願は、本願明細書に記述された特定の実施態様のあらゆる適合例または変形例をカバーするものである。したがって、請求項およびその同等物によってのみ本発明が制限されることを意図するものである。
【特許請求の範囲】
【請求項1】
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、該モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部と第二の端部とを有し、該第二の端部が該第一の可動ライナープレートに回転可能に連結された第一の駆動要素と、該第一の駆動要素の該第一の端部に回転可能に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、該アクチュエータアセンブリは、該第二の駆動要素を該第一の軸に沿って駆動するように構成されていることにより、該第一の駆動要素の該第一の端部が回転して第一の軸に沿って移動し、該第二の端部が回転して、該第一の軸に実質的に垂直である第二の軸に沿って移動し、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
【請求項2】
前記アクチュエータアセンブリが前記第二の駆動要素を前記第一の軸に沿って第一の方向に移動させるときに、前記第一の駆動要素の前記第二の端部が前記第二の軸に沿って第一の方向に移動し、前記第一の可動ライナープレートを前記第一のモールドキャビティの内部から離れるように移動させ、該アクチュエータアセンブリが該第二の駆動要素を該第一の軸に沿って第二の方向に移動させるときに、該第一の駆動要素の該第二の端部が該第二の軸に沿って第二の方向に移動し、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように移動させる、請求項1に記載のモールドアセンブリ。
【請求項3】
前記駆動アセンブリは、前記第二の駆動要素に回転可能に連結された第一の端部と、第二のモールドキャビティの第二の可動ライナープレートに回転可能に連結された第二の端部とを有する第三の駆動要素をさらに含み、該第一の端部が前記第一の軸に沿って移動し、該第三の駆動要素の前記第二の端部が前記第二の軸に沿って移動して、該第二の駆動要素が該第一の軸に沿って移動するときに、該第二の可動ライナープレートを該第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、請求項2に記載のモールドアセンブリ。
【請求項4】
前記アクチュエータアセンブリが前記第二の駆動要素を前記第一の軸に沿って前記第一の方向に移動させるときに、前記第三の駆動要素の前記第二の端部が前記第二の軸に沿って前記第二の方向に移動し、前記第二の可動ライナープレートを前記第二のモールドキャビティの内部から離れるように移動させ、該アクチュエータアセンブリが該第二の駆動要素を該第一の軸に沿って該第二の方向に移動させるときに、該第三の駆動要素の該第二の端部が該第二の軸に沿って該第一の方向に移動し、該第二の可動ライナープレートを該第二のモールドキャビティの内部に向かうように移動させる、請求項3に記載のモールドアセンブリ。
【請求項5】
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、該モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の駆動要素を有するアクチュエータアセンブリと、該第一の駆動要素と該第一の可動ライナープレートとの間に連結された第二の駆動要素とを備えた、駆動アセンブリと
を備え、該アクチュエータアセンブリは、該第一の駆動要素を該第一の軸に沿って駆動するように構成されていることにより、該第二の駆動要素を第一の軸に垂直な第二の軸に沿って移動させ、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
【請求項1】
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、該モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の端部と第二の端部とを有し、該第二の端部が該第一の可動ライナープレートに回転可能に連結された第一の駆動要素と、該第一の駆動要素の該第一の端部に回転可能に連結された第二の駆動要素を含むアクチュエータアセンブリとを備えた、駆動アセンブリと
を備え、該アクチュエータアセンブリは、該第二の駆動要素を該第一の軸に沿って駆動するように構成されていることにより、該第一の駆動要素の該第一の端部が回転して第一の軸に沿って移動し、該第二の端部が回転して、該第一の軸に実質的に垂直である第二の軸に沿って移動し、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
【請求項2】
前記アクチュエータアセンブリが前記第二の駆動要素を前記第一の軸に沿って第一の方向に移動させるときに、前記第一の駆動要素の前記第二の端部が前記第二の軸に沿って第一の方向に移動し、前記第一の可動ライナープレートを前記第一のモールドキャビティの内部から離れるように移動させ、該アクチュエータアセンブリが該第二の駆動要素を該第一の軸に沿って第二の方向に移動させるときに、該第一の駆動要素の該第二の端部が該第二の軸に沿って第二の方向に移動し、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように移動させる、請求項1に記載のモールドアセンブリ。
【請求項3】
前記駆動アセンブリは、前記第二の駆動要素に回転可能に連結された第一の端部と、第二のモールドキャビティの第二の可動ライナープレートに回転可能に連結された第二の端部とを有する第三の駆動要素をさらに含み、該第一の端部が前記第一の軸に沿って移動し、該第三の駆動要素の前記第二の端部が前記第二の軸に沿って移動して、該第二の駆動要素が該第一の軸に沿って移動するときに、該第二の可動ライナープレートを該第二のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、請求項2に記載のモールドアセンブリ。
【請求項4】
前記アクチュエータアセンブリが前記第二の駆動要素を前記第一の軸に沿って前記第一の方向に移動させるときに、前記第三の駆動要素の前記第二の端部が前記第二の軸に沿って前記第二の方向に移動し、前記第二の可動ライナープレートを前記第二のモールドキャビティの内部から離れるように移動させ、該アクチュエータアセンブリが該第二の駆動要素を該第一の軸に沿って該第二の方向に移動させるときに、該第三の駆動要素の該第二の端部が該第二の軸に沿って該第一の方向に移動し、該第二の可動ライナープレートを該第二のモールドキャビティの内部に向かうように移動させる、請求項3に記載のモールドアセンブリ。
【請求項5】
コンクリートブロックを製造するための、コンクリートブロックマシンで使用するように構成されているモールドアセンブリであって、該モールドアセンブリは、
少なくとも第一のライナープレートが移動可能である、少なくとも第一のモールドキャビティを形成する複数のライナープレートと、
第一の駆動要素を有するアクチュエータアセンブリと、該第一の駆動要素と該第一の可動ライナープレートとの間に連結された第二の駆動要素とを備えた、駆動アセンブリと
を備え、該アクチュエータアセンブリは、該第一の駆動要素を該第一の軸に沿って駆動するように構成されていることにより、該第二の駆動要素を第一の軸に垂直な第二の軸に沿って移動させ、該第一の可動ライナープレートを該第一のモールドキャビティの内部に向かうように、およびこれから離れるように移動させる、モールドアセンブリ。
【図1】


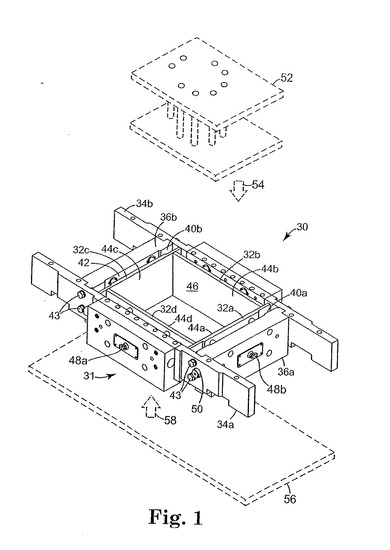
【図3−1】
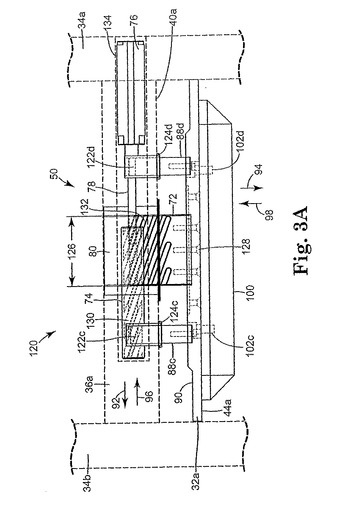
【図3−2】
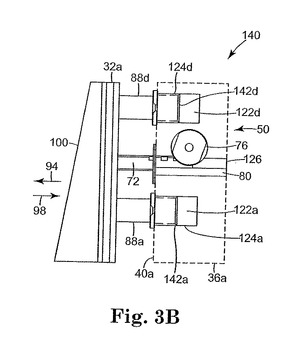
【図4】
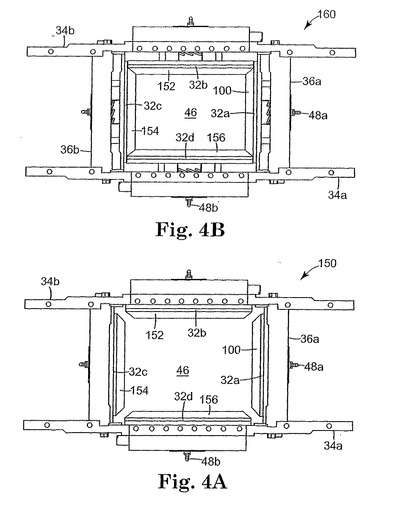
【図5】
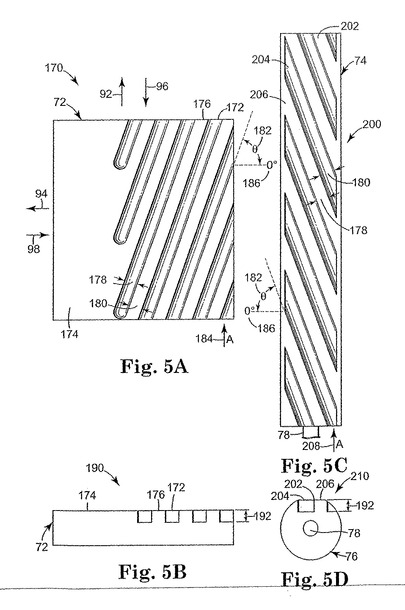
【図6】
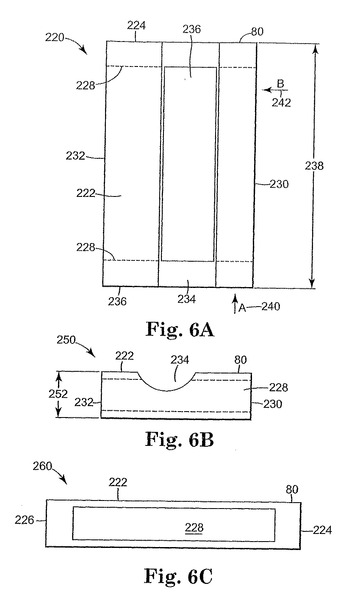
【図7】
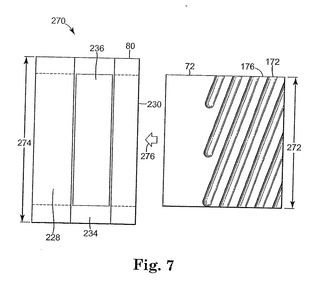
【図8−1】
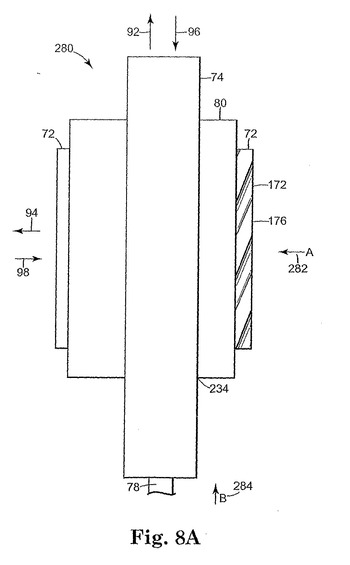
【図8−2】
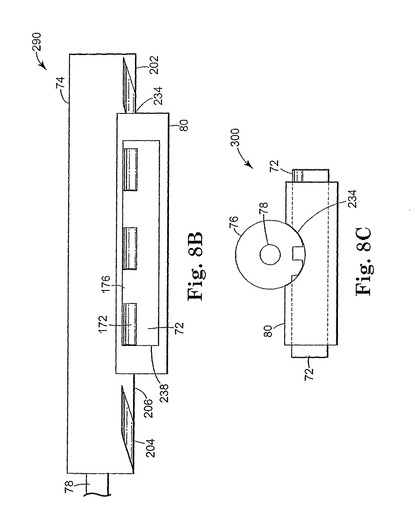
【図9−1】
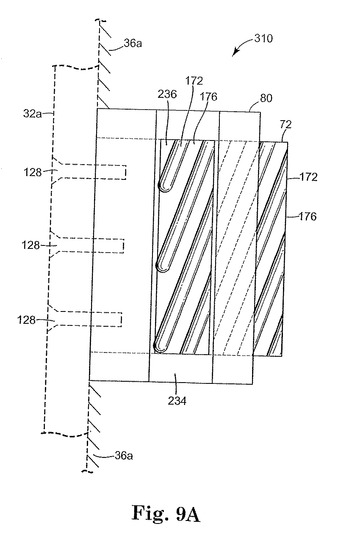
【図9−2】
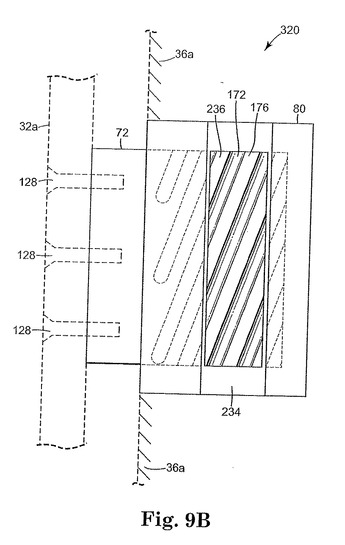
【図10】
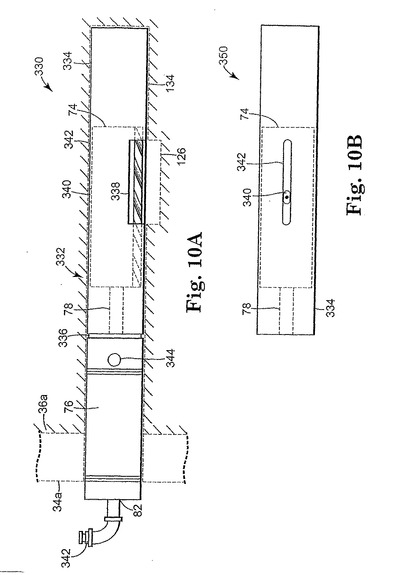
【図11−1】
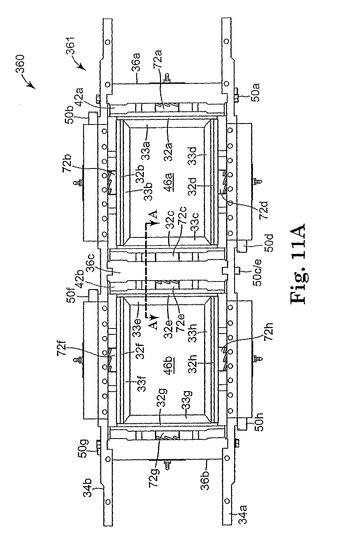
【図11−2】
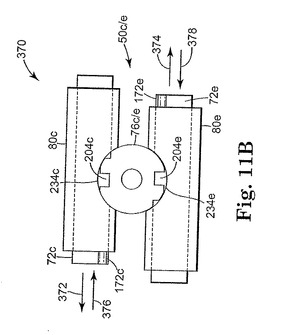
【図12】
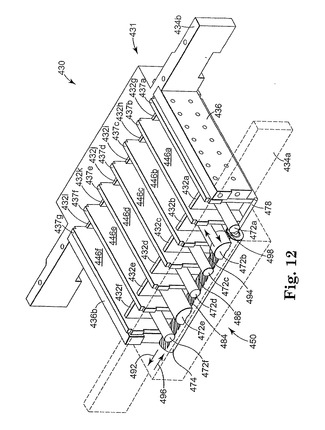
【図13】
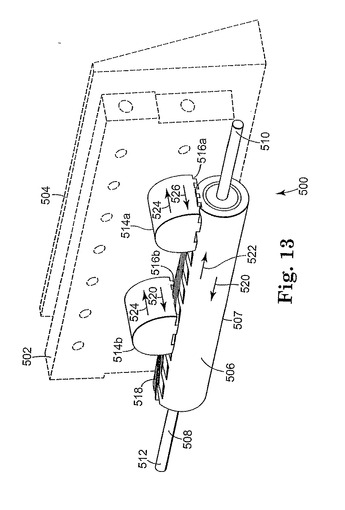
【図15−1】
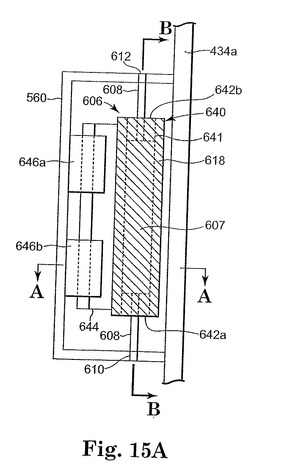
【図15−2】
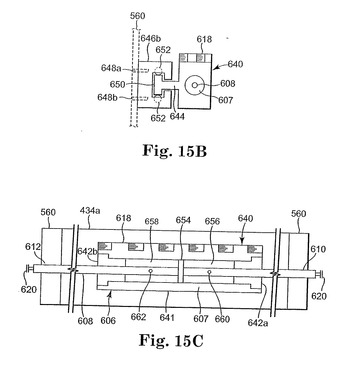
【図16】
【図18−1】
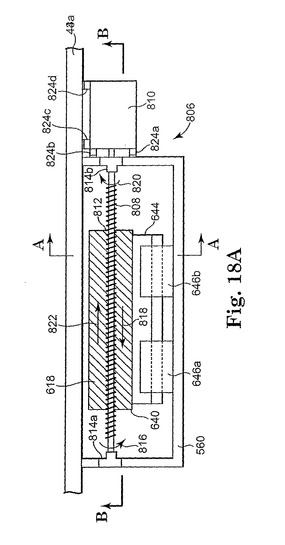
【図18−2】
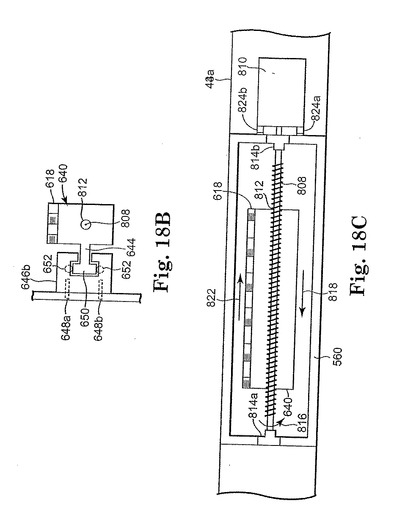
【図19】
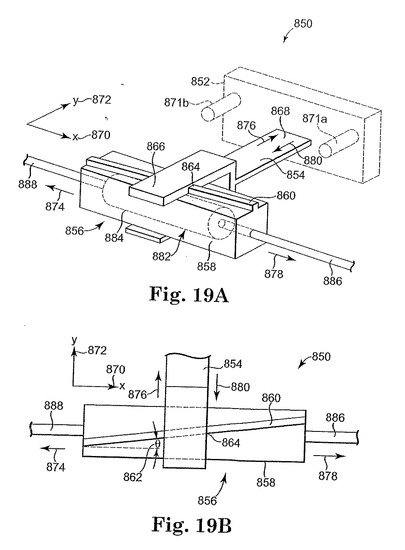
【図20】
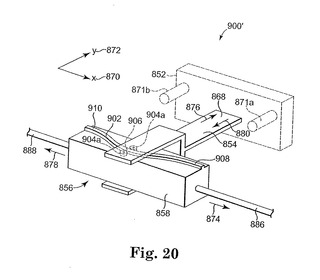
【図21】
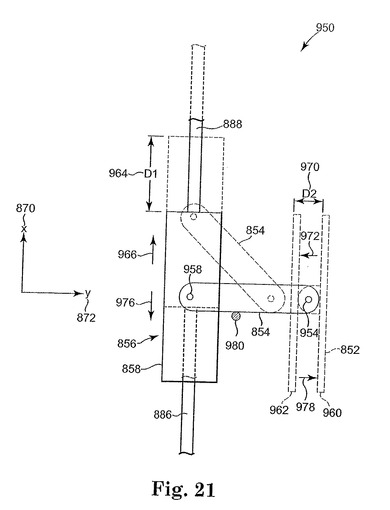
【図22】

【図23】
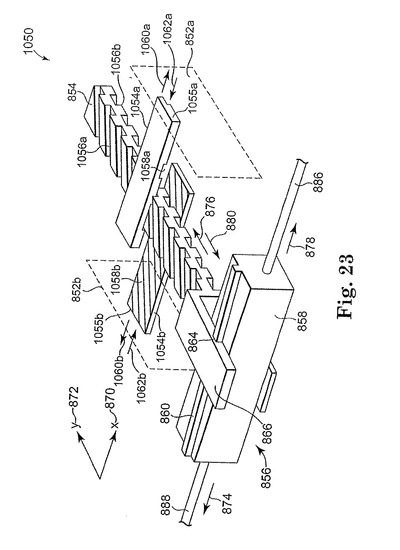
【図2】
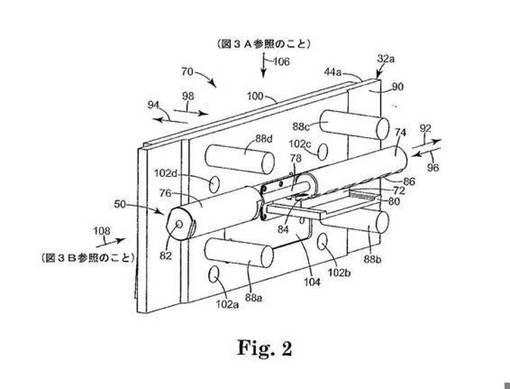
【図14】
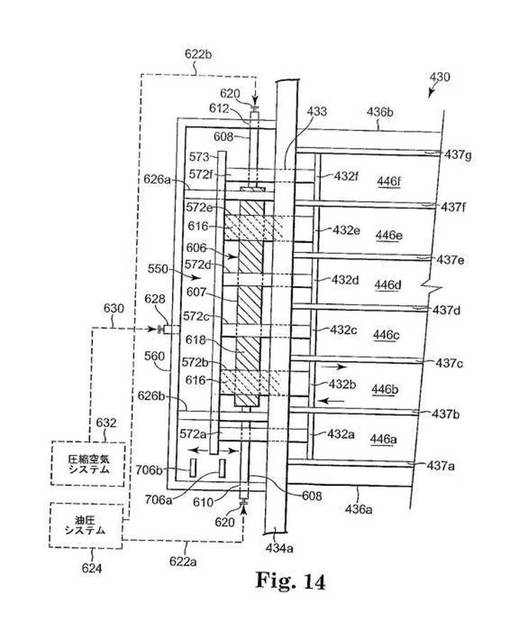
【図17】
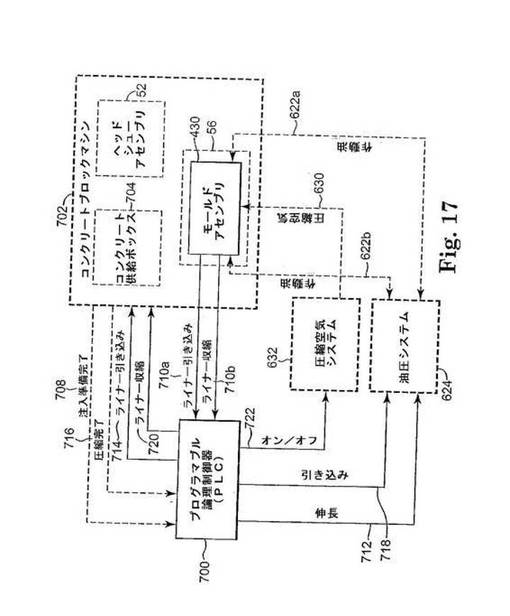
【図3−1】
【図3−2】
【図4】
【図5】
【図6】
【図7】
【図8−1】
【図8−2】
【図9−1】
【図9−2】
【図10】
【図11−1】
【図11−2】
【図12】
【図13】
【図15−1】
【図15−2】
【図16】
【図18−1】
【図18−2】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図14】
【図17】
【公開番号】特開2012−176621(P2012−176621A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−104487(P2012−104487)
【出願日】平成24年5月1日(2012.5.1)
【分割の表示】特願2008−511374(P2008−511374)の分割
【原出願日】平成18年5月10日(2006.5.10)
【出願人】(507237554)ネス インベンションズ, インコーポレイテッド (6)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2012−104487(P2012−104487)
【出願日】平成24年5月1日(2012.5.1)
【分割の表示】特願2008−511374(P2008−511374)の分割
【原出願日】平成18年5月10日(2006.5.10)
【出願人】(507237554)ネス インベンションズ, インコーポレイテッド (6)
【Fターム(参考)】
[ Back to top ]