
可動体のアシスト装置
【課題】単純な構成で誤動作状態からの復帰が可能となる可動体のアシスト装置を提供する。
【解決手段】一形態にかかる可動体のアシスト装置1は、支持体100と前記支持体100に相対的に移動する可動体110とのいずれか一方側に設けられる当受体10と、前記支持体100と前記可動体110とのいずれか他方側に設けられた基体21と、前記基体21に対して所定の移動経路に沿って移動可能かつ回動により前記当受体10と係合または係合解除可能であるとともに、前記当受体10が相対移動する通過経路に対して進退動可能に構成された当接体22と、前記当接体22を前記第2位置に向けて付勢する第1の付勢手段23と、を備える。
【解決手段】一形態にかかる可動体のアシスト装置1は、支持体100と前記支持体100に相対的に移動する可動体110とのいずれか一方側に設けられる当受体10と、前記支持体100と前記可動体110とのいずれか他方側に設けられた基体21と、前記基体21に対して所定の移動経路に沿って移動可能かつ回動により前記当受体10と係合または係合解除可能であるとともに、前記当受体10が相対移動する通過経路に対して進退動可能に構成された当接体22と、前記当接体22を前記第2位置に向けて付勢する第1の付勢手段23と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、各種の可動体の動作を補助する可動体のアシスト装置に関する。
【背景技術】
【0002】
戸枠などの支持体に対して相対移動する吊り戸や引き戸等の可動体の動作を補助するため、付勢機構を用いて強制移動をする可動体のアシスト装置が知られている。このような可動体のアシスト装置では、例えば戸枠側に当受体が設けられ、吊り戸側に当受体に係合可能な当接体が設けられている。当接体は待機位置と引き込み位置でスライド移動可能であり、付勢機構としての引張りコイルばねに連結されている。当接体は例えば先端に樹脂製の係合部を有し、この係合部が当受体と係合及び係合解除可能になっている。
【0003】
吊り戸が閉めきられていない開位置にあるとき、当接体は、引張りコイルばねを引き伸ばした状態で待機位置に保持されている。開位置から操作者が吊り戸を閉位置(移動終了位置)に移動させると、その途中で当接体が、当受体に突き当たり、当受体を捕捉する。同時に、待機位置での保持が解かれ、当接体が当受体を捕捉したまま引張りコイルばねに引張られて引込位置に向かって移動する。このため、この移動寸法の分吊り戸が強制的に移動終了位置に向かって移動させられる。
【0004】
吊り戸が閉位置にあるとき、当接体は、引張りコイルばねを圧縮した状態となっている。この閉位置から操作者が吊り戸を開位置に向けて移動させると、引張りコイルばねを引張りながら吊り戸が移動する。所定位置に至ると当接体が当受体を開放し、再び待機位置へ保持される。
【0005】
このような可動体のアシスト装置では、誤作動により当接体が当受体に係合しないまま当接体が引込位置に位置する状態となる場合がある。この状態から復帰させる機構として、当接体に斜めのガイド面を設け、当受体との当接により当受体から退避する下向きに圧力を作用させて回動することにより当受体と当接体とを係合させることが行われている(例えば特許文献1参照)。このアシスト装置では、当接体は軸を中心として回動することで当受体に再係合する所定の形状に構成され、当接体を収容した枠体が下向きに弾性変形するように形成され、かつ、枠体の変形を許容する隙間が設けられている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−169723号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した技術では、次のような問題がある。すなわち、誤作動状態からの復帰に部品の変形をともなうと共に複雑な寸法設定が必要となる。
【0008】
実施形態では、単純な構成で誤動作状態からの復帰が可能となる可動体のアシスト装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一形態にかかる可動体のアシスト装置は、支持体と前記支持体に相対的に移動する可動体とのいずれか一方側に設けられる当受体と、前記支持体と前記可動体とのいずれか他方側に設けられた基体と、前記基体に対して所定の移動経路に沿って移動可能かつ回動により前記当受体と係合または係合解除可能であるとともに、前記当受体が相対移動する通過経路に対して進退動可能に構成された当接体と、前記当接体を前記第2位置に向けて付勢する第1の付勢手段と、を備えることを特徴とする。
【発明の効果】
【0010】
実施形態によれば、単純な構成で誤動作状態からの復帰が可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態にかかるアシスト装置を備えた吊り戸の動作を示す説明図。
【図2】同実施形態にかかるアシスト装置を備えた吊り戸の動作を示す説明図。
【図3】同実施形態にかかるアシストユニットの一部を示す平面図。
【図4】同実施形態にかかるアシストユニットの待機時における一部を示す斜視図。
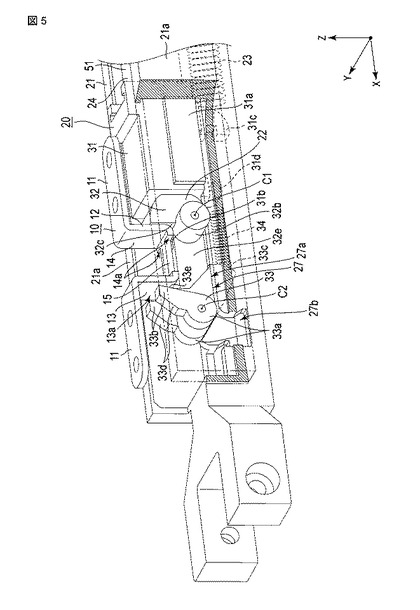
【図5】同実施形態にかかるアシストユニットの係合時における一部を示す斜視図。
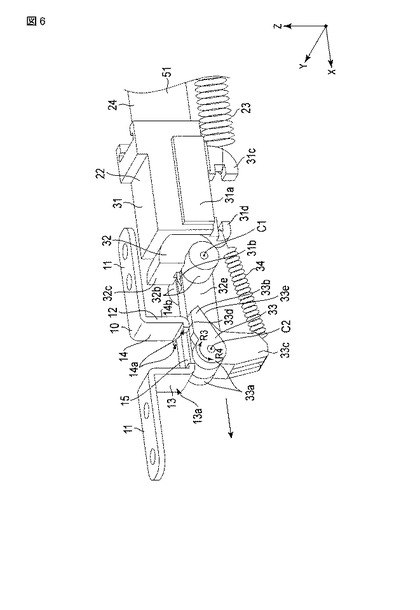
【図6】同実施形態にかかるアシストユニットの乗り越え時における一部を示す斜視図。
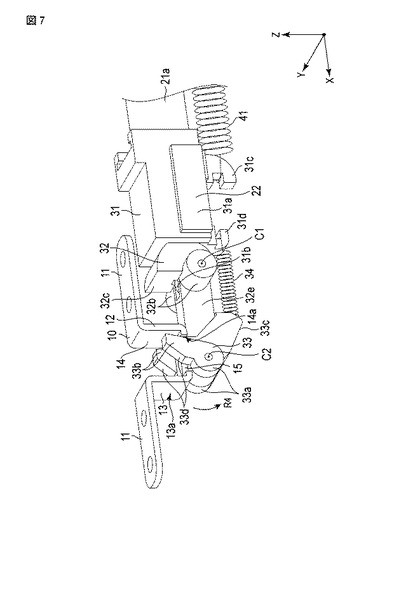
【図7】同実施形態にかかるアシストユニットの復帰時における一部を示す斜視図。
【図8】同実施形態にかかるアシストユニットの正常時の動作を示す説明図。
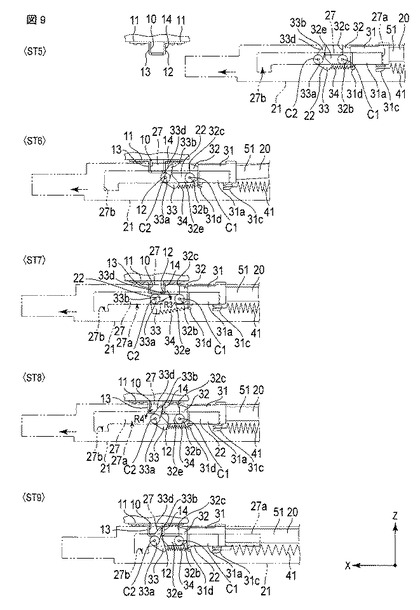
【図9】同実施形態にかかるアシストユニットの誤作動復帰の動作を示す説明図。
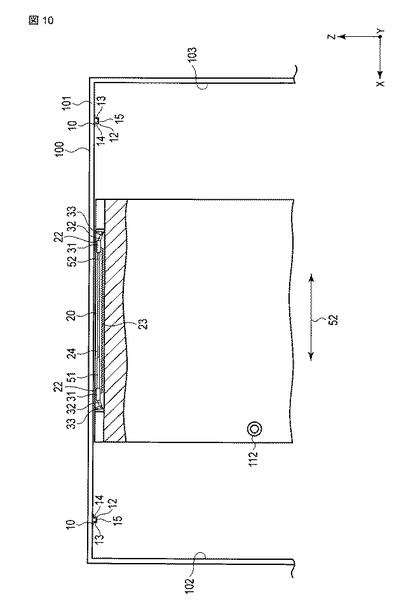
【図10】他の実施形態にかかるアシスト装置を備えた吊り戸の説明図。
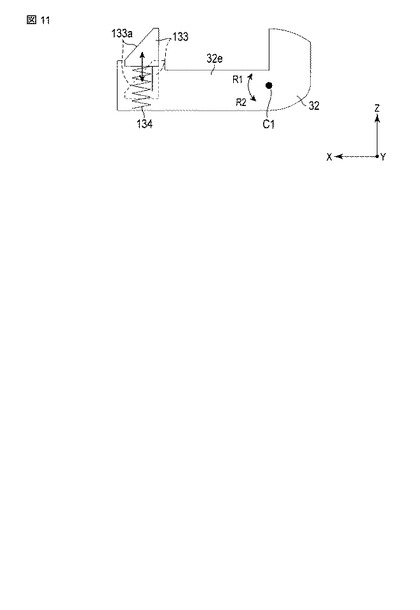
【図11】他の実施形態にかかるアシスト装置のカムの構成を示す説明図。
【発明を実施するための形態】
【0012】
以下、本発明の一実施形態かかる可動体のアシスト装置1について、図1乃至図7を参照して説明する。各図中矢印X,Y,Zはそれぞれ互いに直交する3方向を示す。ここでは例えばX軸はスライド方向に、Y軸は幅方向に、Z軸は上下方向に、それぞれ沿っている。また、各図において説明のため、適宜構成を拡大、縮小または省略して示している。
【0013】
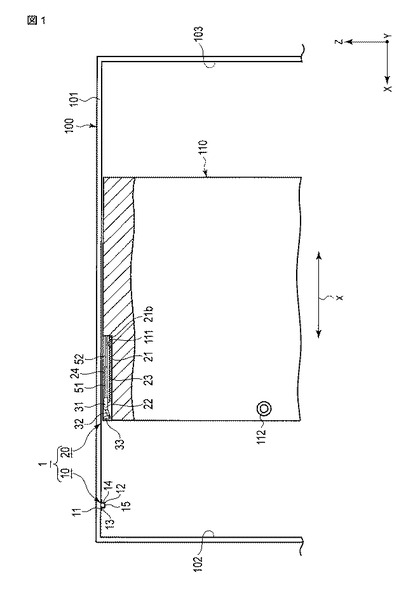
図1及び図2に示すように、アシスト装置1は、可動体及び支持体のうち一方に設けられる当受体としてのストライカ10と、可動体及び支持体のうち他方に設けられるアシストユニット20と、を備えて構成される。
【0014】
本実施形態において、例えば支持体は戸枠100、可動体は吊り戸110であり、可動体としての吊り戸110にアシストユニット20が設けられ、支持体としての戸枠100にストライカ10が設けられる場合について例示する。
【0015】
図1に示すように、戸枠100は、上枠101、左枠102、右枠103、及び下枠を備えている。上枠101に吊り戸110がスライド可能に支持されている。
【0016】
吊り戸110の上端部には、スライド方向に沿ってアシストユニット20を収める溝111が形成されている。なお、ここでは一枚の吊り戸110に着目し、図1中左側が戸先側(移動終了位置側)、右側が戸尻側とする。吊り戸110の戸先側の端部には取っ手112が形成されている。
【0017】
図1に示すように吊り戸110が戸先側の移動終了位置から離間して左枠102に接していない開状態を第1状態、図2に示すように吊り戸110が戸先側の移動終了位置に移動されきって左枠102に当接した閉状態を第2状態とする。
【0018】
アシスト装置1は、戸枠100に設けられたストライカ10と、吊り戸110に設けられたアシストユニット20と、を備える。
【0019】
アシストユニット20は、吊り戸110の上端部の溝111に設けられた基体としてのハウジング21と、ハウジング21のスライド方向前方である戸先側(第1方向)の端部に収められ第1位置と第2位置との間でスライド移動可能に支持された当接体としてのラッチ22と、ラッチ22をハウジング21に対してスライド方向後方である戸尻側(第2方向)に付勢する第1の付勢機構(第1付勢手段)としての引っ張りコイルばね23と、ラッチ22に連結されラッチ22のスライド移動に抵抗力を付与して緩衝する制動機構としてのピストンダンパ24と、を備えている。
【0020】
ストライカ10は、当受体である。ストライカ10は、上枠101の吊り戸110の戸先側の移動終了位置から一定の位置に固定される。
【0021】
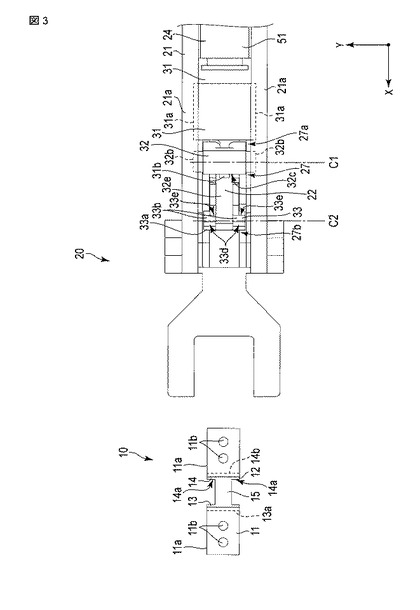
図3に示すように、ストライカ10は、一枚の板状の金属板を板金加工等により曲折して成形され、上枠101に取り付けられる板状の取付部材11と、上枠101から下方に突出する係合突起部12と、一体に備えている。
【0022】
取付部材11は、一対の平板上のベース11aと、ベース11aに設けられ、上枠101に木螺子等の締結部材によりベース11aを上枠101に固定する孔部11bと、を備えている。
【0023】
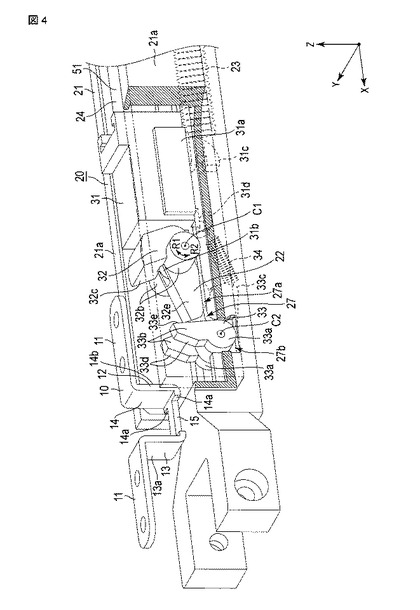
図4に示すように、係合突起部12は、Y方向からの側面視で上方が開口する「コ」の字形状に形成されている。係合突起12は、一対のベース11a間を渡すように設けられ、その端部がベース11aに接続される。係合突起部12は、吊り戸110の移動により、吊り戸110の溝111上を通過してアシストユニット20の一部に係合してアシストユニット20内に入り込み、あるいはアシストユニット20の一部から解放可能に形成されている。
【0024】
係合突起部12は、一方のベース11aと連続する板状の第1係合部13と、他方のベース11aと連続する板状の第2係合部14と、第1係合部13及び第2係合部14を連続させる連結部15と、を備えている。
【0025】
第1係合部13は、係合突起12の吊り戸110の移動終了位置側(第1方向側)に配置され、第2係合部14は、他方側(第2方向側)に配置される。第1係合部13の移動終了位置側の面は正常時にラッチ22の係合片33bと係合する第1の係合面13aを形成する。第2係合部14の移動終了位置側の端面は誤作動復帰時に第2の係合面14aを形成する。また、第2係合部14の第2の係合面14aとは反対側の第2方向側の面は被押圧部32cを押圧する押圧面14bを形成する。
【0026】
連結部15は、第1係合部13の下端と第2係合部14の下端との間に渡される板状部材であり、そのY方向の幅が第1係合部13及び第2係合部14のY方向の幅よりも小さく形成されている。誤作動復帰時にはこの連結部15のY方向の両脇の空間に後述するラッチ22の一対の係合片33bが進入可能となるように設定されている。
【0027】
ハウジング21は、上面開口でスライド方向に細長い箱状を成している。ハウジング21の前端部における側壁21a,21aの間にラッチベース31が収まり、側壁21a,21aの内面のガイドレール27に沿って移動可能になっている。なお、各図においては内部構造の説明のためにハウジング21の一部を切欠して断面を示している。
【0028】
ハウジング21の側壁21a,21aの端部にはガイドレール27(ガイド)が設けられている。このガイドレール27は、側壁21a、21aの内側に形成され、X軸に沿って第1位置(待機位置)と第2位置(引込位置)に至って延びる主ガイド路27aと、主ガイド路27aの前端部の第1位置から湾曲して下方に延びる待機路27bとを連続して有した形状となっている。ガイドレール27は例えば側壁21a,21aの内面に設けられる突起や溝によって形成される段差で構成されている。例えば主ガイド路27aは側壁21a,21aの内面において第2位置から第1位置にまで至る突起で構成され、待機路27bは第1位置において下方に延びる溝で構成されている。
【0029】
ガイドレール27には、ラッチ22の前端部に形成された第2軸部33aが回転可能に係合する。第2軸部33aは第2位置から第1位置に至る主ガイド路27aでスライド方向に移動可能であり、第1位置においてカム32の第1回動方向R1の回動により主ガイド路27aから待機路27bに進入可能であり、第2回動方向R2の回動により待機路27bから主ガイド路27aに進入可能になっている。
【0030】
またガイドレール27における第2軸部33aよりも後方位置には、第1軸部32bが回転可能かつスライド移動可能に係合する。さらに第1軸部32bよりも後方位置の主ガイド路27aにはラッチベース31の突起部31aがスライド移動可能に係合する。
【0031】
図1に示すように、ハウジング21の下部には引張コイルばね23の端部をハウジング21に対して固定するための連結部21bが形成されている。連結部21bは例えば側壁21a,21a間にY方向に掛け渡された軸状部材であり、この連結部21bに引張コイルばね23の後端部が取り付けられる。
【0032】
図3乃至図7に示すように、ラッチ22は、ラッチベース31と、ラッチベース31の先端部に回動可能に連結したカム32と、カム32の先端に回動可能に連結したフック33と、を備え、ハウジング21内の側壁21a,21a間で移動可能に支持されている。
【0033】
ラッチベース31はX方向に細長形成された突起部31aを有している。突起部31aはラッチベース31のY方向両端にそれぞれ形成されている。突起部31aのガイドレール27への係合によりハウジング21の一対の側壁21a,21aの間にラッチベース31がX方向にスライド可能に支持される。
【0034】
ラッチベース31の先端におけるY方向中央部分には、カム32の第1軸部32bが回転可能に連結される連結部31bが形成されている。
【0035】
ラッチベース31の下端後方部には引張コイルばね23の前端部が連結される被付勢部31cが形成されており、引張コイルばね23によりラッチベース31が常時引き込み方向(第2方向)に付勢される。ラッチベース31の下端部前方には第2の付勢機構としての引っ張りコイルばね34の後端部が連結される連結部31dが形成されている。
【0036】
カム32は、ラッチベース31の連結部31bに、Y方向に沿う軸心C1(第1の軸)を中心として第1回動方向R1及びその逆の第2回動方向R2に回転可能に軸支されている。カム32は軸心C1を中心としてY方向に突出する一対の第1軸部32bを有し、この第1軸部32bがガイドレール27に支持され回転可能かつガイドレール27に沿って移動可能に係合している。
【0037】
カム32は、軸心C1から上方に向かって突出する被押圧部32cと、軸心C1から先端側に突出形成されるアーム部32eと、を備えている。
【0038】
被押圧部32cはカム32の上部において上方に突出する面を成し、正常状態において吊り戸110の移動によりストライカ10によって引込方向に押圧される。この押圧に伴ってカム32がR1方向に回動し、図4に示す待機状態から図5に示す係合状態となる。
【0039】
アーム部32eの先端にはフック33が軸支されている。フック部33は、Y方向に沿う軸心C2を中心として、第3回動方向R3及びその逆の第4回動方向R4に回動可能になっている。
【0040】
フック33はY方向に沿う軸心C2を有しY方向に突出形成される一対の第2軸部33aを有し、この第2軸部33aがガイドレール27に支持され回転可能かつガイドレール27に沿って移動可能に係合している。
【0041】
フック33は、第3回動方向R3側に突出する一対の係合片33bを有している。一対の係合片33bはY方向両側にそれぞれ設けられている。各係合片33bは、三角形の板状に構成され、先端側には前方が下降するテーパ面33dを有し、後側にはストライカの係合面13a,14aと係合する係合面33eを有している。
【0042】
フック33の第2軸部33aよりも後方かつ下方には第2被付勢部33cが設けられている。第2被付勢部33cに第2の付勢機構(第2付勢手段)としての引張コイルばね34の前端部が連結されている。引張コイルばね34によりフック33が常時ラッチベース31側に引っ張られて、第4回動方向R4に付勢される。
【0043】
誤作動時にフック33が第2軸部33aを中心としてR3方向に揺動することにより、図6に示すように一対の係合片33bがストライカ10の通過経路から下方に退避してストライカ10の移動(乗り越え)を許容するとともに、ストライカ10の移動後(乗り越え後)は図7に示すように引張りコイルばね34の復元力によりR4方向に揺動することにより通過経路に復帰し、連結部15の両脇の空間に進入して第2係合面14aに係合するようになっている。すなわち、誤作動復帰時には一対の係合片33bの間に連結部15が進入可能になっている。
【0044】
引張コイルばね23は、ハウジング21内の下部において、軸方向がスライド方向に沿うように配置されている。引張コイルばね23の前端部はラッチ22の下部の被付勢部31cに連結され、後端部はハウジング21の連結部21bに連結されている。この引張コイルばね23は主ガイド路27aにあるラッチベース31を引込方向に付勢して強制移動させる機能を有している。
【0045】
第2の付勢機構である引張コイルばね34は前端部がフック33の第2付勢部33cに連結され、後端部がラッチベース31の下部の連結部31dに連結されている。この引張コイルばね34はフック33を常時R4方向に付勢する機能と、第2軸部33aを待機路27bに引っかけることによりラッチ22を待機位置に保持させる機能と、を有している。
【0046】
制動機構としてのピストンダンパ24は、ハウジング21内の上部において、軸方向がスライド方向に沿うように配置されている。ピストンダンパ24は、内部に流体が封入されたシリンダ51と、シリンダ51内でスライド方向に往復動するピストンを先端に有するピストンロッド52とを有している。
【0047】
ピストンロッド52の後端部はハウジング21に固定され、ピストンに対向するシリンダ51の外側端部(前端部)はラッチ22の後端に連結されている。
【0048】
ピストンダンパ24は、シリンダ51内に納められたピストンの動作にシリンダ51内の流体の流体対向を作用させることで、シリンダ51もしくはピストンロッド52の押し込み及び引張り動作に対して抵抗力を付与し、ラッチ22のハウジング21に対するスライド動作を制動する。なおシリンダ51に封入される流体としては典型的にはシリコンオイルなどの粘性流体が用いられるがこれに限られず、気体を用いてもよい。
【0049】
以下、本実施形態にかかるアシスト装置1の動作について図8及び図9を参照して説明する。
【0050】
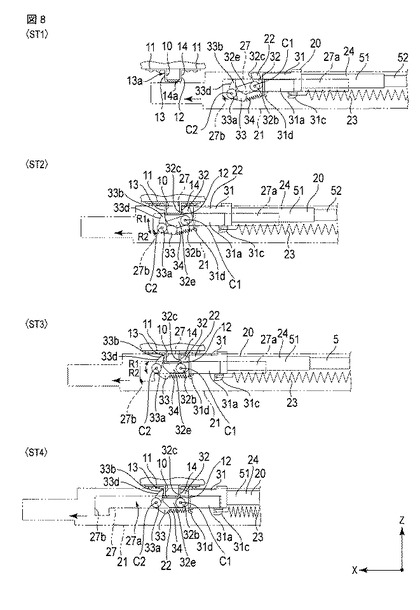
まず、第1状態から第2状態とする第1の動作について図8を参照して説明する。図8の<ST1>に示すように、ラッチ22がストライカ10に到達していない第1状態では、引張りコイルばね23を引き伸ばした状態であり、ラッチ22はハウジング21の端部の待機位置に保持されている。このとき、ラッチ22の第2軸部33aが待機路27bに引っかかり引張コイルばね34によって引っ張られて保持されている。
【0051】
第1状態から操作者が吊り戸110を戸先側(第1方向)に向かって移動させることにより、<ST2>に示すように吊り戸110が第1の所定位置に至ると、ラッチ22がストライカ10に当接する。すると、ストライカ10の押圧面14bが被押圧部32cを後方に押し込むことにより、第1軸部32bを中心としてカム32がR1方向に回動する。
【0052】
この回動によって、<ST3>に示すように、カム32の先端のフック33がストライカ10に係合し、ラッチ22にストライカ10が捕捉される。このとき、カム32の一対の係合片33bと被押圧部32cとの間であってアーム32e上の空間に係合突起12が配置され、第1係合面13aが係合片33bの後側の係合面33eに対向する。
【0053】
また、カム32がR1方向に回動すると同時に下方の第2軸部33aが上方に移動して主ガイド路27aに入り込む位置に至り、待機路27bへの保持が解除されるとともに、ラッチ22がスライド方向(X方向)に沿って移動可能な状態となる。
【0054】
そして、<ST4>に示すように、引張コイルばね23の復元力により引張りコイルばね23を圧縮させながら、ハウジング21及び吊り戸110に対して右方にラッチ22が相対移動して引込位置(第2位置)まで相対移動させられる。この移動に伴い戸枠100及びストライカ10に対して吊り戸110及びハウジング21が第1方向に相対的に強制移動させられる。このときピストンダンパ24により抵抗力が付与され、緩衝しながらゆっくり自動的に吊り戸110が閉まる方向に移動することとなる。
【0055】
次に、第2状態から第1状態とする第2の動作について図8を参照して説明する。この第2の動作では上記第1の動作と逆に<ST4><ST3><ST2><ST1>の順で動作する。すなわち、<ST4>に示すように吊り戸110が戸先側の終了位置に移動し切った第2状態から吊り戸110を戸尻側(第2方向)に移動させる操作をすると、引張コイルばね23の付勢力に抗してラッチ22がストライカ10を捕捉したまま吊り戸110及びハウジング21に対して一端側に相対移動しながら、吊り戸110が右側に移動する<ST3>。このとき、ラッチ22の後端はピストンダンパ24のピストンロッド52に連結されているため、ピストンを移動させつつシリンダ51内の流体の抵抗力を受ける。
【0056】
所定位置に至ると、被押圧部32cからストライカ10が離れて引張りコイルばね41の復元力により第2軸部33aを中心としてカム32がR2方向に回動する<ST2>。この回動によりストライカ10が解放され、フック33とストライカ10との係合が解除される。同時に第2軸部33aは主ガイド路27aの前端の待機位置に至り、第2軸部33aが下方の待機路27bに入り込むとともに、引張りコイルばね34により再び待機位置に保持される待機状態に戻る<ST1>。この後、吊り戸110の移動は引張コイルばね23の付勢力から開放される。
【0057】
次に、第3の動作として、例えば誤作動等によりラッチ22がストライカ10に係合しないまま引込位置に移動してしまった第3の状態からの復帰動作について、図9を参照して説明する。
【0058】
<ST5>に示すように、誤作動によりストライカ10との係合が解除された状態でラッチ22が引込位置にある第3の状態から、吊り戸110が戸枠100に対して第1方向に移動すると、<ST6>に示すように、フック33がストライカ10に当接し、係合片33bが押圧面14bによって後方に押圧される。この押圧により、<ST7>に示すようにフック33は、第2軸部33aを中心として、R3方向に揺動する。この揺動により、フック33の係合片33bの上端部が第2状態よりも下方に移動しストライカの通過経路から退避することで、ストライカ10がフック33を乗越え可能となり、X方向に沿って移動可能となる。このとき、係合片33bの前面がテーパ面33dとなっていることにより、乗り越えがスムーズかつ容易となる。この状態で、吊り戸110が戸枠100に対して第1方向に移動することでストライカ10と係合片33bとが係合可能な位置まで引込方向に移動する。
【0059】
ストライカ10の第2の係合部14が係合片33bを乗越えると、<ST8>に示すように引張りコイルばね34の復元力によりフック33がR4方向に揺動する。この揺動により、係合片33bが通過経路に進入して連結部15の脇に進入することで、ストライカ10とラッチ22が係合する。このとき第2の係合部14の係合面14aと係合片33bの後側の係合面33eとが対向して係合するため、第1係合面14aに係合する第2状態よりも後方位置で係合することになる。
【0060】
この係合状態で吊り戸110を第2方向(移動終了位置側から離間する方向)に移動させると、<ST9>に示すように、ストライカ10がラッチ22に捕捉された状態で、主ガイド路27aに沿って移動する。そして第1位置に至ると、カム32が回動して待機路27aに保持されるとともにストライカ10とラッチ22との係合が解除され、前記第1の状態に復帰する。
【0061】
本実施形態によれば、誤動作状態からの復帰を可能とするとともに部品の破損を回避できる。すなわち、ラッチ22を移動経路から下方に退避させるように揺動可能としたことにより、第3の状態から第1の状態への復帰が可能となる。また、フック33を揺動する構成としたことにより、高さ寸法の許容範囲が大きく、寸法設定が容易である。また、この退避によりストライカ10とラッチ22とが衝突を防ぎ破損を回避することが可能である。また、自動復帰の際に部品を弾性変形させる必要がないため、弾性樹脂疲労等による部品の破損を防止でき、長期間性能を保つことが出来る。
【0062】
ラッチ22を2段階に回転可能な構造として1つのガイドレール27内を移動するだけの単純な構成で、複数の異なる動作をすることが可能となる。
【0063】
さらに、ストライカ10の前後2箇所に係合部13,14を設けるとともにその間の連結部15の脇に係合片33bを進入可能とする形状により、正常状態での動作の安定性を確保しながら、誤作動復帰時の揺動寸法を小さく設定できる。このため装置の小型化を図れる。
【0064】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々変形実施可能である。また、各部の具体的構成や材質等は上記実施形態に例示したものに限られるものではなく適宜変更可能である。
【0065】
例えば上記実施形態においては、可動体としての吊り戸110側にアシストユニット20を備え、支持体としての戸枠100側にストライカ10を設けた場合について例示したが、これに限られるものではなく、可動体側にストライカ10を、支持体側にアシストユニット20を、それぞれ設けてもよい。
【0066】
また、上記実施形態においては可動体が吊り戸110である場合について例示したが、引き戸、昇降式のスライドドア等、他の可動体にも本発明を適用可能である。
【0067】
上記実施形態では、ハウジング21の一方側のみにラッチ30が設けられ、一方向のアシスト動作を行う場合を例示したが、これに限られるものではない。例えば図10に示すようにハウジング21の両端にラッチ22を設けるとともに戸枠100の左右両側にストライカ10をそれぞれ設けることにより、戸先側及び戸尻側の両方向の動作をアシストする構成としてもよい。場合には例えば引張コイルばね23の両端をそれぞれ両側のラッチ22に連結するとともに、ピストンダンパ24のシリンダ51とピストンロッド52の端部をそれぞれ両側のラッチベース31にそれぞれ連結することにより、両側のラッチ22の補助及び制動に共通の機構を利用することができる。
【0068】
また、第1の付勢手段と第2の付勢手段として個別の引張コイルばね23,34を設けた例を示したが、これに限られるものではなく、一つの付勢機構でこれらの複数の異なる機能を兼ねるように構成してもよい。
【0069】
なお、本実施形態においては、正常時用と誤作動復帰時用とで異なる位置に係合する場合を例示したが、正常時用と誤作動復帰時用とで同じ位置に係合するようにしてもよい。この場合であっても上記実施形態と同様に通過経路から退避させることにより再係合可能となる。
【0070】
上記実施形態においては一枚の吊り戸110に着目して説明したが、実際には同様の吊り戸110及びアシストユニット20が2以上備えられている場合にも本発明を適用できる。
【0071】
さらに上記実施形態においてはフック33を退避方向に付勢する第2の付勢手段として引っ張りコイルばね34を用いたが、これに限られるものではなく、他の構造の付勢手段を用いてもよい。
【0072】
また、フック33が揺動により進退移動する構成について例示したが、これに限られるものではなく、例えばスライド方向と交差する方向に移動することで進退動する構造を用いても良い。例えば図11に示すように圧縮コイルばね134を用いてカム32の先端でフック133を上下方向に移動可能とすることで通過経路に対する進退移動可能とする構成も適用可能である。この場合にも先端側の面をテーパ状の傾斜面133aとすることにより、傾斜面133aがストライカ10によって後方に押圧されることでフック133が下方に移動して通過経路から退避可能となる。ストライカ10の移動後は圧縮コイルばね134の復元力によって上方に移動させられることにより通過経路に復帰してストライカ10と係合可能となる。この他、付勢手段として例えば板ばねやねじりコイルばねなどを用いてもよい。
【0073】
さらに、上記実施形態の構成要件のうち一部を省略しても本発明を実現可能である。
【符号の説明】
【0074】
1…アシスト装置、10…ストライカ(当受体)、20…アシストユニット、21…ハウジング(基体)、22…ラッチ(当接体)、23…引張コイルばね(第1の付勢手段)、24…ピストンダンパ(制動機構)、27…ガイドレール、27a…主ガイド路、27b…待機路、31…ラッチベース、32…カム、32b…第1軸部、32c…被押圧部、32e…アーム、33…フック、33a…第2軸部、33b…係合片、34…引張コイルばね(第2の付勢手段)、51…シリンダ、52…ピストンロッド。
【技術分野】
【0001】
本発明は、各種の可動体の動作を補助する可動体のアシスト装置に関する。
【背景技術】
【0002】
戸枠などの支持体に対して相対移動する吊り戸や引き戸等の可動体の動作を補助するため、付勢機構を用いて強制移動をする可動体のアシスト装置が知られている。このような可動体のアシスト装置では、例えば戸枠側に当受体が設けられ、吊り戸側に当受体に係合可能な当接体が設けられている。当接体は待機位置と引き込み位置でスライド移動可能であり、付勢機構としての引張りコイルばねに連結されている。当接体は例えば先端に樹脂製の係合部を有し、この係合部が当受体と係合及び係合解除可能になっている。
【0003】
吊り戸が閉めきられていない開位置にあるとき、当接体は、引張りコイルばねを引き伸ばした状態で待機位置に保持されている。開位置から操作者が吊り戸を閉位置(移動終了位置)に移動させると、その途中で当接体が、当受体に突き当たり、当受体を捕捉する。同時に、待機位置での保持が解かれ、当接体が当受体を捕捉したまま引張りコイルばねに引張られて引込位置に向かって移動する。このため、この移動寸法の分吊り戸が強制的に移動終了位置に向かって移動させられる。
【0004】
吊り戸が閉位置にあるとき、当接体は、引張りコイルばねを圧縮した状態となっている。この閉位置から操作者が吊り戸を開位置に向けて移動させると、引張りコイルばねを引張りながら吊り戸が移動する。所定位置に至ると当接体が当受体を開放し、再び待機位置へ保持される。
【0005】
このような可動体のアシスト装置では、誤作動により当接体が当受体に係合しないまま当接体が引込位置に位置する状態となる場合がある。この状態から復帰させる機構として、当接体に斜めのガイド面を設け、当受体との当接により当受体から退避する下向きに圧力を作用させて回動することにより当受体と当接体とを係合させることが行われている(例えば特許文献1参照)。このアシスト装置では、当接体は軸を中心として回動することで当受体に再係合する所定の形状に構成され、当接体を収容した枠体が下向きに弾性変形するように形成され、かつ、枠体の変形を許容する隙間が設けられている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2006−169723号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述した技術では、次のような問題がある。すなわち、誤作動状態からの復帰に部品の変形をともなうと共に複雑な寸法設定が必要となる。
【0008】
実施形態では、単純な構成で誤動作状態からの復帰が可能となる可動体のアシスト装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明の一形態にかかる可動体のアシスト装置は、支持体と前記支持体に相対的に移動する可動体とのいずれか一方側に設けられる当受体と、前記支持体と前記可動体とのいずれか他方側に設けられた基体と、前記基体に対して所定の移動経路に沿って移動可能かつ回動により前記当受体と係合または係合解除可能であるとともに、前記当受体が相対移動する通過経路に対して進退動可能に構成された当接体と、前記当接体を前記第2位置に向けて付勢する第1の付勢手段と、を備えることを特徴とする。
【発明の効果】
【0010】
実施形態によれば、単純な構成で誤動作状態からの復帰が可能となる。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態にかかるアシスト装置を備えた吊り戸の動作を示す説明図。
【図2】同実施形態にかかるアシスト装置を備えた吊り戸の動作を示す説明図。
【図3】同実施形態にかかるアシストユニットの一部を示す平面図。
【図4】同実施形態にかかるアシストユニットの待機時における一部を示す斜視図。
【図5】同実施形態にかかるアシストユニットの係合時における一部を示す斜視図。
【図6】同実施形態にかかるアシストユニットの乗り越え時における一部を示す斜視図。
【図7】同実施形態にかかるアシストユニットの復帰時における一部を示す斜視図。
【図8】同実施形態にかかるアシストユニットの正常時の動作を示す説明図。
【図9】同実施形態にかかるアシストユニットの誤作動復帰の動作を示す説明図。
【図10】他の実施形態にかかるアシスト装置を備えた吊り戸の説明図。
【図11】他の実施形態にかかるアシスト装置のカムの構成を示す説明図。
【発明を実施するための形態】
【0012】
以下、本発明の一実施形態かかる可動体のアシスト装置1について、図1乃至図7を参照して説明する。各図中矢印X,Y,Zはそれぞれ互いに直交する3方向を示す。ここでは例えばX軸はスライド方向に、Y軸は幅方向に、Z軸は上下方向に、それぞれ沿っている。また、各図において説明のため、適宜構成を拡大、縮小または省略して示している。
【0013】
図1及び図2に示すように、アシスト装置1は、可動体及び支持体のうち一方に設けられる当受体としてのストライカ10と、可動体及び支持体のうち他方に設けられるアシストユニット20と、を備えて構成される。
【0014】
本実施形態において、例えば支持体は戸枠100、可動体は吊り戸110であり、可動体としての吊り戸110にアシストユニット20が設けられ、支持体としての戸枠100にストライカ10が設けられる場合について例示する。
【0015】
図1に示すように、戸枠100は、上枠101、左枠102、右枠103、及び下枠を備えている。上枠101に吊り戸110がスライド可能に支持されている。
【0016】
吊り戸110の上端部には、スライド方向に沿ってアシストユニット20を収める溝111が形成されている。なお、ここでは一枚の吊り戸110に着目し、図1中左側が戸先側(移動終了位置側)、右側が戸尻側とする。吊り戸110の戸先側の端部には取っ手112が形成されている。
【0017】
図1に示すように吊り戸110が戸先側の移動終了位置から離間して左枠102に接していない開状態を第1状態、図2に示すように吊り戸110が戸先側の移動終了位置に移動されきって左枠102に当接した閉状態を第2状態とする。
【0018】
アシスト装置1は、戸枠100に設けられたストライカ10と、吊り戸110に設けられたアシストユニット20と、を備える。
【0019】
アシストユニット20は、吊り戸110の上端部の溝111に設けられた基体としてのハウジング21と、ハウジング21のスライド方向前方である戸先側(第1方向)の端部に収められ第1位置と第2位置との間でスライド移動可能に支持された当接体としてのラッチ22と、ラッチ22をハウジング21に対してスライド方向後方である戸尻側(第2方向)に付勢する第1の付勢機構(第1付勢手段)としての引っ張りコイルばね23と、ラッチ22に連結されラッチ22のスライド移動に抵抗力を付与して緩衝する制動機構としてのピストンダンパ24と、を備えている。
【0020】
ストライカ10は、当受体である。ストライカ10は、上枠101の吊り戸110の戸先側の移動終了位置から一定の位置に固定される。
【0021】
図3に示すように、ストライカ10は、一枚の板状の金属板を板金加工等により曲折して成形され、上枠101に取り付けられる板状の取付部材11と、上枠101から下方に突出する係合突起部12と、一体に備えている。
【0022】
取付部材11は、一対の平板上のベース11aと、ベース11aに設けられ、上枠101に木螺子等の締結部材によりベース11aを上枠101に固定する孔部11bと、を備えている。
【0023】
図4に示すように、係合突起部12は、Y方向からの側面視で上方が開口する「コ」の字形状に形成されている。係合突起12は、一対のベース11a間を渡すように設けられ、その端部がベース11aに接続される。係合突起部12は、吊り戸110の移動により、吊り戸110の溝111上を通過してアシストユニット20の一部に係合してアシストユニット20内に入り込み、あるいはアシストユニット20の一部から解放可能に形成されている。
【0024】
係合突起部12は、一方のベース11aと連続する板状の第1係合部13と、他方のベース11aと連続する板状の第2係合部14と、第1係合部13及び第2係合部14を連続させる連結部15と、を備えている。
【0025】
第1係合部13は、係合突起12の吊り戸110の移動終了位置側(第1方向側)に配置され、第2係合部14は、他方側(第2方向側)に配置される。第1係合部13の移動終了位置側の面は正常時にラッチ22の係合片33bと係合する第1の係合面13aを形成する。第2係合部14の移動終了位置側の端面は誤作動復帰時に第2の係合面14aを形成する。また、第2係合部14の第2の係合面14aとは反対側の第2方向側の面は被押圧部32cを押圧する押圧面14bを形成する。
【0026】
連結部15は、第1係合部13の下端と第2係合部14の下端との間に渡される板状部材であり、そのY方向の幅が第1係合部13及び第2係合部14のY方向の幅よりも小さく形成されている。誤作動復帰時にはこの連結部15のY方向の両脇の空間に後述するラッチ22の一対の係合片33bが進入可能となるように設定されている。
【0027】
ハウジング21は、上面開口でスライド方向に細長い箱状を成している。ハウジング21の前端部における側壁21a,21aの間にラッチベース31が収まり、側壁21a,21aの内面のガイドレール27に沿って移動可能になっている。なお、各図においては内部構造の説明のためにハウジング21の一部を切欠して断面を示している。
【0028】
ハウジング21の側壁21a,21aの端部にはガイドレール27(ガイド)が設けられている。このガイドレール27は、側壁21a、21aの内側に形成され、X軸に沿って第1位置(待機位置)と第2位置(引込位置)に至って延びる主ガイド路27aと、主ガイド路27aの前端部の第1位置から湾曲して下方に延びる待機路27bとを連続して有した形状となっている。ガイドレール27は例えば側壁21a,21aの内面に設けられる突起や溝によって形成される段差で構成されている。例えば主ガイド路27aは側壁21a,21aの内面において第2位置から第1位置にまで至る突起で構成され、待機路27bは第1位置において下方に延びる溝で構成されている。
【0029】
ガイドレール27には、ラッチ22の前端部に形成された第2軸部33aが回転可能に係合する。第2軸部33aは第2位置から第1位置に至る主ガイド路27aでスライド方向に移動可能であり、第1位置においてカム32の第1回動方向R1の回動により主ガイド路27aから待機路27bに進入可能であり、第2回動方向R2の回動により待機路27bから主ガイド路27aに進入可能になっている。
【0030】
またガイドレール27における第2軸部33aよりも後方位置には、第1軸部32bが回転可能かつスライド移動可能に係合する。さらに第1軸部32bよりも後方位置の主ガイド路27aにはラッチベース31の突起部31aがスライド移動可能に係合する。
【0031】
図1に示すように、ハウジング21の下部には引張コイルばね23の端部をハウジング21に対して固定するための連結部21bが形成されている。連結部21bは例えば側壁21a,21a間にY方向に掛け渡された軸状部材であり、この連結部21bに引張コイルばね23の後端部が取り付けられる。
【0032】
図3乃至図7に示すように、ラッチ22は、ラッチベース31と、ラッチベース31の先端部に回動可能に連結したカム32と、カム32の先端に回動可能に連結したフック33と、を備え、ハウジング21内の側壁21a,21a間で移動可能に支持されている。
【0033】
ラッチベース31はX方向に細長形成された突起部31aを有している。突起部31aはラッチベース31のY方向両端にそれぞれ形成されている。突起部31aのガイドレール27への係合によりハウジング21の一対の側壁21a,21aの間にラッチベース31がX方向にスライド可能に支持される。
【0034】
ラッチベース31の先端におけるY方向中央部分には、カム32の第1軸部32bが回転可能に連結される連結部31bが形成されている。
【0035】
ラッチベース31の下端後方部には引張コイルばね23の前端部が連結される被付勢部31cが形成されており、引張コイルばね23によりラッチベース31が常時引き込み方向(第2方向)に付勢される。ラッチベース31の下端部前方には第2の付勢機構としての引っ張りコイルばね34の後端部が連結される連結部31dが形成されている。
【0036】
カム32は、ラッチベース31の連結部31bに、Y方向に沿う軸心C1(第1の軸)を中心として第1回動方向R1及びその逆の第2回動方向R2に回転可能に軸支されている。カム32は軸心C1を中心としてY方向に突出する一対の第1軸部32bを有し、この第1軸部32bがガイドレール27に支持され回転可能かつガイドレール27に沿って移動可能に係合している。
【0037】
カム32は、軸心C1から上方に向かって突出する被押圧部32cと、軸心C1から先端側に突出形成されるアーム部32eと、を備えている。
【0038】
被押圧部32cはカム32の上部において上方に突出する面を成し、正常状態において吊り戸110の移動によりストライカ10によって引込方向に押圧される。この押圧に伴ってカム32がR1方向に回動し、図4に示す待機状態から図5に示す係合状態となる。
【0039】
アーム部32eの先端にはフック33が軸支されている。フック部33は、Y方向に沿う軸心C2を中心として、第3回動方向R3及びその逆の第4回動方向R4に回動可能になっている。
【0040】
フック33はY方向に沿う軸心C2を有しY方向に突出形成される一対の第2軸部33aを有し、この第2軸部33aがガイドレール27に支持され回転可能かつガイドレール27に沿って移動可能に係合している。
【0041】
フック33は、第3回動方向R3側に突出する一対の係合片33bを有している。一対の係合片33bはY方向両側にそれぞれ設けられている。各係合片33bは、三角形の板状に構成され、先端側には前方が下降するテーパ面33dを有し、後側にはストライカの係合面13a,14aと係合する係合面33eを有している。
【0042】
フック33の第2軸部33aよりも後方かつ下方には第2被付勢部33cが設けられている。第2被付勢部33cに第2の付勢機構(第2付勢手段)としての引張コイルばね34の前端部が連結されている。引張コイルばね34によりフック33が常時ラッチベース31側に引っ張られて、第4回動方向R4に付勢される。
【0043】
誤作動時にフック33が第2軸部33aを中心としてR3方向に揺動することにより、図6に示すように一対の係合片33bがストライカ10の通過経路から下方に退避してストライカ10の移動(乗り越え)を許容するとともに、ストライカ10の移動後(乗り越え後)は図7に示すように引張りコイルばね34の復元力によりR4方向に揺動することにより通過経路に復帰し、連結部15の両脇の空間に進入して第2係合面14aに係合するようになっている。すなわち、誤作動復帰時には一対の係合片33bの間に連結部15が進入可能になっている。
【0044】
引張コイルばね23は、ハウジング21内の下部において、軸方向がスライド方向に沿うように配置されている。引張コイルばね23の前端部はラッチ22の下部の被付勢部31cに連結され、後端部はハウジング21の連結部21bに連結されている。この引張コイルばね23は主ガイド路27aにあるラッチベース31を引込方向に付勢して強制移動させる機能を有している。
【0045】
第2の付勢機構である引張コイルばね34は前端部がフック33の第2付勢部33cに連結され、後端部がラッチベース31の下部の連結部31dに連結されている。この引張コイルばね34はフック33を常時R4方向に付勢する機能と、第2軸部33aを待機路27bに引っかけることによりラッチ22を待機位置に保持させる機能と、を有している。
【0046】
制動機構としてのピストンダンパ24は、ハウジング21内の上部において、軸方向がスライド方向に沿うように配置されている。ピストンダンパ24は、内部に流体が封入されたシリンダ51と、シリンダ51内でスライド方向に往復動するピストンを先端に有するピストンロッド52とを有している。
【0047】
ピストンロッド52の後端部はハウジング21に固定され、ピストンに対向するシリンダ51の外側端部(前端部)はラッチ22の後端に連結されている。
【0048】
ピストンダンパ24は、シリンダ51内に納められたピストンの動作にシリンダ51内の流体の流体対向を作用させることで、シリンダ51もしくはピストンロッド52の押し込み及び引張り動作に対して抵抗力を付与し、ラッチ22のハウジング21に対するスライド動作を制動する。なおシリンダ51に封入される流体としては典型的にはシリコンオイルなどの粘性流体が用いられるがこれに限られず、気体を用いてもよい。
【0049】
以下、本実施形態にかかるアシスト装置1の動作について図8及び図9を参照して説明する。
【0050】
まず、第1状態から第2状態とする第1の動作について図8を参照して説明する。図8の<ST1>に示すように、ラッチ22がストライカ10に到達していない第1状態では、引張りコイルばね23を引き伸ばした状態であり、ラッチ22はハウジング21の端部の待機位置に保持されている。このとき、ラッチ22の第2軸部33aが待機路27bに引っかかり引張コイルばね34によって引っ張られて保持されている。
【0051】
第1状態から操作者が吊り戸110を戸先側(第1方向)に向かって移動させることにより、<ST2>に示すように吊り戸110が第1の所定位置に至ると、ラッチ22がストライカ10に当接する。すると、ストライカ10の押圧面14bが被押圧部32cを後方に押し込むことにより、第1軸部32bを中心としてカム32がR1方向に回動する。
【0052】
この回動によって、<ST3>に示すように、カム32の先端のフック33がストライカ10に係合し、ラッチ22にストライカ10が捕捉される。このとき、カム32の一対の係合片33bと被押圧部32cとの間であってアーム32e上の空間に係合突起12が配置され、第1係合面13aが係合片33bの後側の係合面33eに対向する。
【0053】
また、カム32がR1方向に回動すると同時に下方の第2軸部33aが上方に移動して主ガイド路27aに入り込む位置に至り、待機路27bへの保持が解除されるとともに、ラッチ22がスライド方向(X方向)に沿って移動可能な状態となる。
【0054】
そして、<ST4>に示すように、引張コイルばね23の復元力により引張りコイルばね23を圧縮させながら、ハウジング21及び吊り戸110に対して右方にラッチ22が相対移動して引込位置(第2位置)まで相対移動させられる。この移動に伴い戸枠100及びストライカ10に対して吊り戸110及びハウジング21が第1方向に相対的に強制移動させられる。このときピストンダンパ24により抵抗力が付与され、緩衝しながらゆっくり自動的に吊り戸110が閉まる方向に移動することとなる。
【0055】
次に、第2状態から第1状態とする第2の動作について図8を参照して説明する。この第2の動作では上記第1の動作と逆に<ST4><ST3><ST2><ST1>の順で動作する。すなわち、<ST4>に示すように吊り戸110が戸先側の終了位置に移動し切った第2状態から吊り戸110を戸尻側(第2方向)に移動させる操作をすると、引張コイルばね23の付勢力に抗してラッチ22がストライカ10を捕捉したまま吊り戸110及びハウジング21に対して一端側に相対移動しながら、吊り戸110が右側に移動する<ST3>。このとき、ラッチ22の後端はピストンダンパ24のピストンロッド52に連結されているため、ピストンを移動させつつシリンダ51内の流体の抵抗力を受ける。
【0056】
所定位置に至ると、被押圧部32cからストライカ10が離れて引張りコイルばね41の復元力により第2軸部33aを中心としてカム32がR2方向に回動する<ST2>。この回動によりストライカ10が解放され、フック33とストライカ10との係合が解除される。同時に第2軸部33aは主ガイド路27aの前端の待機位置に至り、第2軸部33aが下方の待機路27bに入り込むとともに、引張りコイルばね34により再び待機位置に保持される待機状態に戻る<ST1>。この後、吊り戸110の移動は引張コイルばね23の付勢力から開放される。
【0057】
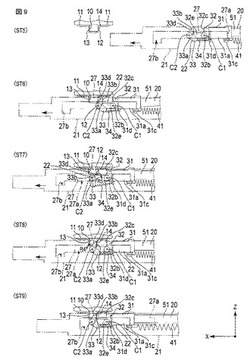
次に、第3の動作として、例えば誤作動等によりラッチ22がストライカ10に係合しないまま引込位置に移動してしまった第3の状態からの復帰動作について、図9を参照して説明する。
【0058】
<ST5>に示すように、誤作動によりストライカ10との係合が解除された状態でラッチ22が引込位置にある第3の状態から、吊り戸110が戸枠100に対して第1方向に移動すると、<ST6>に示すように、フック33がストライカ10に当接し、係合片33bが押圧面14bによって後方に押圧される。この押圧により、<ST7>に示すようにフック33は、第2軸部33aを中心として、R3方向に揺動する。この揺動により、フック33の係合片33bの上端部が第2状態よりも下方に移動しストライカの通過経路から退避することで、ストライカ10がフック33を乗越え可能となり、X方向に沿って移動可能となる。このとき、係合片33bの前面がテーパ面33dとなっていることにより、乗り越えがスムーズかつ容易となる。この状態で、吊り戸110が戸枠100に対して第1方向に移動することでストライカ10と係合片33bとが係合可能な位置まで引込方向に移動する。
【0059】
ストライカ10の第2の係合部14が係合片33bを乗越えると、<ST8>に示すように引張りコイルばね34の復元力によりフック33がR4方向に揺動する。この揺動により、係合片33bが通過経路に進入して連結部15の脇に進入することで、ストライカ10とラッチ22が係合する。このとき第2の係合部14の係合面14aと係合片33bの後側の係合面33eとが対向して係合するため、第1係合面14aに係合する第2状態よりも後方位置で係合することになる。
【0060】
この係合状態で吊り戸110を第2方向(移動終了位置側から離間する方向)に移動させると、<ST9>に示すように、ストライカ10がラッチ22に捕捉された状態で、主ガイド路27aに沿って移動する。そして第1位置に至ると、カム32が回動して待機路27aに保持されるとともにストライカ10とラッチ22との係合が解除され、前記第1の状態に復帰する。
【0061】
本実施形態によれば、誤動作状態からの復帰を可能とするとともに部品の破損を回避できる。すなわち、ラッチ22を移動経路から下方に退避させるように揺動可能としたことにより、第3の状態から第1の状態への復帰が可能となる。また、フック33を揺動する構成としたことにより、高さ寸法の許容範囲が大きく、寸法設定が容易である。また、この退避によりストライカ10とラッチ22とが衝突を防ぎ破損を回避することが可能である。また、自動復帰の際に部品を弾性変形させる必要がないため、弾性樹脂疲労等による部品の破損を防止でき、長期間性能を保つことが出来る。
【0062】
ラッチ22を2段階に回転可能な構造として1つのガイドレール27内を移動するだけの単純な構成で、複数の異なる動作をすることが可能となる。
【0063】
さらに、ストライカ10の前後2箇所に係合部13,14を設けるとともにその間の連結部15の脇に係合片33bを進入可能とする形状により、正常状態での動作の安定性を確保しながら、誤作動復帰時の揺動寸法を小さく設定できる。このため装置の小型化を図れる。
【0064】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々変形実施可能である。また、各部の具体的構成や材質等は上記実施形態に例示したものに限られるものではなく適宜変更可能である。
【0065】
例えば上記実施形態においては、可動体としての吊り戸110側にアシストユニット20を備え、支持体としての戸枠100側にストライカ10を設けた場合について例示したが、これに限られるものではなく、可動体側にストライカ10を、支持体側にアシストユニット20を、それぞれ設けてもよい。
【0066】
また、上記実施形態においては可動体が吊り戸110である場合について例示したが、引き戸、昇降式のスライドドア等、他の可動体にも本発明を適用可能である。
【0067】
上記実施形態では、ハウジング21の一方側のみにラッチ30が設けられ、一方向のアシスト動作を行う場合を例示したが、これに限られるものではない。例えば図10に示すようにハウジング21の両端にラッチ22を設けるとともに戸枠100の左右両側にストライカ10をそれぞれ設けることにより、戸先側及び戸尻側の両方向の動作をアシストする構成としてもよい。場合には例えば引張コイルばね23の両端をそれぞれ両側のラッチ22に連結するとともに、ピストンダンパ24のシリンダ51とピストンロッド52の端部をそれぞれ両側のラッチベース31にそれぞれ連結することにより、両側のラッチ22の補助及び制動に共通の機構を利用することができる。
【0068】
また、第1の付勢手段と第2の付勢手段として個別の引張コイルばね23,34を設けた例を示したが、これに限られるものではなく、一つの付勢機構でこれらの複数の異なる機能を兼ねるように構成してもよい。
【0069】
なお、本実施形態においては、正常時用と誤作動復帰時用とで異なる位置に係合する場合を例示したが、正常時用と誤作動復帰時用とで同じ位置に係合するようにしてもよい。この場合であっても上記実施形態と同様に通過経路から退避させることにより再係合可能となる。
【0070】
上記実施形態においては一枚の吊り戸110に着目して説明したが、実際には同様の吊り戸110及びアシストユニット20が2以上備えられている場合にも本発明を適用できる。
【0071】
さらに上記実施形態においてはフック33を退避方向に付勢する第2の付勢手段として引っ張りコイルばね34を用いたが、これに限られるものではなく、他の構造の付勢手段を用いてもよい。
【0072】
また、フック33が揺動により進退移動する構成について例示したが、これに限られるものではなく、例えばスライド方向と交差する方向に移動することで進退動する構造を用いても良い。例えば図11に示すように圧縮コイルばね134を用いてカム32の先端でフック133を上下方向に移動可能とすることで通過経路に対する進退移動可能とする構成も適用可能である。この場合にも先端側の面をテーパ状の傾斜面133aとすることにより、傾斜面133aがストライカ10によって後方に押圧されることでフック133が下方に移動して通過経路から退避可能となる。ストライカ10の移動後は圧縮コイルばね134の復元力によって上方に移動させられることにより通過経路に復帰してストライカ10と係合可能となる。この他、付勢手段として例えば板ばねやねじりコイルばねなどを用いてもよい。
【0073】
さらに、上記実施形態の構成要件のうち一部を省略しても本発明を実現可能である。
【符号の説明】
【0074】
1…アシスト装置、10…ストライカ(当受体)、20…アシストユニット、21…ハウジング(基体)、22…ラッチ(当接体)、23…引張コイルばね(第1の付勢手段)、24…ピストンダンパ(制動機構)、27…ガイドレール、27a…主ガイド路、27b…待機路、31…ラッチベース、32…カム、32b…第1軸部、32c…被押圧部、32e…アーム、33…フック、33a…第2軸部、33b…係合片、34…引張コイルばね(第2の付勢手段)、51…シリンダ、52…ピストンロッド。
【特許請求の範囲】
【請求項1】
支持体と前記支持体に相対的に移動する可動体とのいずれか一方側に設けられる当受体と、
前記支持体と前記可動体とのいずれか他方側に設けられた基体と、
前記基体に対して所定の移動経路に沿って移動可能かつ回動により前記当受体と係合または係合解除可能であるとともに、前記当受体が相対移動する通過経路に対して進退動可能に構成された当接体と、
前記当接体を前記第2位置に向けて付勢する第1の付勢手段と、
を備えることを特徴とする可動体のアシスト装置。
【請求項2】
前記基体は、前記可動体のスライド方向に沿って前記第1位置から前記第2位置に至る主ガイド路と、前記主ガイド路の前記第1位置から前記スライド方向から外れて曲がる待機路と、を一体に有するガイドを有し、
前記当接体は、前記主ガイド路に沿って移動するベースと、前記ベースに対して前記スライド方向に交差する第1の軸を中心に回動可能に連結されたカムと、を備え、
前記カムは、前記可動体の移動により前記当受体に当接して押圧される被押圧部と、前記主ガイド路及び前記待機路に沿って移動可能に係合するとともに前記第1の軸を中心とする回動に伴って前記当受体と係合または解除可能なフックと、を有し、
前記フックは、前記当受体と係合解除されかつ前記通過経路にある状態で、前記可動体の移動に伴って前記通過経路から一時的に退避するとともに、前記通過経路に進入する方向に付勢されていることを特徴とする請求項1記載の可動体のアシスト装置。
【請求項3】
前記フックは前記カムに前記スライド方向に交差する第2の軸を中心として揺動可能に連結され、前記可動体の移動に伴って一方に揺動することで前記通過経路から退避して前記当受体の移動を許容するとともに、前記当受体が移動して係合可能な所定位置に至った後、他方に揺動して前記通過経路に復帰して前記当受体と係合することを特徴とする請求項2記載の可動体のアシスト装置。
【請求項4】
前記フックは前記カムに前記スライド方向と交差する方向に移動可能に設けられ、前記可動体の移動に伴って一方へ移動することで前記通過経路から退避して前記当受体の移動を許容するとともに、前記当受体が移動して係合可能な所定位置に至った後、他方に移動して前記通過経路に復帰して前記当受体と係合することを特徴とする請求項2記載の可動体のアシスト装置。
【請求項5】
前記当接体の移動に抵抗力を付与する制動機構を備えたことを特徴とする請求項1乃至6のいずれか記載の可動体のアシスト装置。
【請求項6】
第1の動作として、前記可動体の第1方向の移動に伴って前記被押圧部が前記当受体に押圧されることにより前記第1の軸を中心として前記カムが回動しながら前記第2の軸が前記待機路から前記主ガイド路に移動することにより、前記フックが前記当受体に係合し、前記第1の付勢手段により前記当接体が前記当受体と係合した状態で前記基体に対して第2方向に移動することで前記可動体が前記第1方向に強制移動させられ、
第2の動作として、前記可動体の第2方向の移動に伴って前記第2の軸が主ガイド路から前記待機路に移動するとともに前記第1の軸が主ガイド路にある状態で前記第1の軸を中心として前記カムが回動することで前記フックが前記当受体を解放し、
第3の動作として、前記第2の軸が前記主ガイド路にありかつ前記フックが前記当受体の通過経路にあって前記当受体を解放している状態から、前記可動体の第1方向の移動に伴って前記フックが前記当受体に押圧されることにより、前記フックが前記通過経路から一時的に退避することを特徴とする請求項2ないし5記載の可動体のアシスト装置。
【請求項7】
前記当受体は、前記第1及び第2の動作において前記フックが係合する第1係合部と、前記第3の動作において前記フックが係合する第2係合部と、を有し、前記第2係合部は前記第1係合部よりも第2方向側に配置されることを特徴とする請求項6記載の可動体のアシスト装置。
【請求項1】
支持体と前記支持体に相対的に移動する可動体とのいずれか一方側に設けられる当受体と、
前記支持体と前記可動体とのいずれか他方側に設けられた基体と、
前記基体に対して所定の移動経路に沿って移動可能かつ回動により前記当受体と係合または係合解除可能であるとともに、前記当受体が相対移動する通過経路に対して進退動可能に構成された当接体と、
前記当接体を前記第2位置に向けて付勢する第1の付勢手段と、
を備えることを特徴とする可動体のアシスト装置。
【請求項2】
前記基体は、前記可動体のスライド方向に沿って前記第1位置から前記第2位置に至る主ガイド路と、前記主ガイド路の前記第1位置から前記スライド方向から外れて曲がる待機路と、を一体に有するガイドを有し、
前記当接体は、前記主ガイド路に沿って移動するベースと、前記ベースに対して前記スライド方向に交差する第1の軸を中心に回動可能に連結されたカムと、を備え、
前記カムは、前記可動体の移動により前記当受体に当接して押圧される被押圧部と、前記主ガイド路及び前記待機路に沿って移動可能に係合するとともに前記第1の軸を中心とする回動に伴って前記当受体と係合または解除可能なフックと、を有し、
前記フックは、前記当受体と係合解除されかつ前記通過経路にある状態で、前記可動体の移動に伴って前記通過経路から一時的に退避するとともに、前記通過経路に進入する方向に付勢されていることを特徴とする請求項1記載の可動体のアシスト装置。
【請求項3】
前記フックは前記カムに前記スライド方向に交差する第2の軸を中心として揺動可能に連結され、前記可動体の移動に伴って一方に揺動することで前記通過経路から退避して前記当受体の移動を許容するとともに、前記当受体が移動して係合可能な所定位置に至った後、他方に揺動して前記通過経路に復帰して前記当受体と係合することを特徴とする請求項2記載の可動体のアシスト装置。
【請求項4】
前記フックは前記カムに前記スライド方向と交差する方向に移動可能に設けられ、前記可動体の移動に伴って一方へ移動することで前記通過経路から退避して前記当受体の移動を許容するとともに、前記当受体が移動して係合可能な所定位置に至った後、他方に移動して前記通過経路に復帰して前記当受体と係合することを特徴とする請求項2記載の可動体のアシスト装置。
【請求項5】
前記当接体の移動に抵抗力を付与する制動機構を備えたことを特徴とする請求項1乃至6のいずれか記載の可動体のアシスト装置。
【請求項6】
第1の動作として、前記可動体の第1方向の移動に伴って前記被押圧部が前記当受体に押圧されることにより前記第1の軸を中心として前記カムが回動しながら前記第2の軸が前記待機路から前記主ガイド路に移動することにより、前記フックが前記当受体に係合し、前記第1の付勢手段により前記当接体が前記当受体と係合した状態で前記基体に対して第2方向に移動することで前記可動体が前記第1方向に強制移動させられ、
第2の動作として、前記可動体の第2方向の移動に伴って前記第2の軸が主ガイド路から前記待機路に移動するとともに前記第1の軸が主ガイド路にある状態で前記第1の軸を中心として前記カムが回動することで前記フックが前記当受体を解放し、
第3の動作として、前記第2の軸が前記主ガイド路にありかつ前記フックが前記当受体の通過経路にあって前記当受体を解放している状態から、前記可動体の第1方向の移動に伴って前記フックが前記当受体に押圧されることにより、前記フックが前記通過経路から一時的に退避することを特徴とする請求項2ないし5記載の可動体のアシスト装置。
【請求項7】
前記当受体は、前記第1及び第2の動作において前記フックが係合する第1係合部と、前記第3の動作において前記フックが係合する第2係合部と、を有し、前記第2係合部は前記第1係合部よりも第2方向側に配置されることを特徴とする請求項6記載の可動体のアシスト装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−72252(P2013−72252A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−213262(P2011−213262)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000135209)株式会社ニフコ (972)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000135209)株式会社ニフコ (972)
[ Back to top ]