
可動小型プラットフォームを作動させるためのシステム、方法、及び装置
本明細書内において、小型の作動可能なプラットフォームシステムに関するシステム、方法、及び装置が提示される。一実施形態によれば、該システム、方法、及び装置は、小型ミラーを含む制御可能に作動させられる小型プラットフォームアセンブリに関する。

【発明の詳細な説明】
【技術分野】
【0001】
関連特許出願の相互参照
本出願は、2005年12月16日にファイリングされた米国実用新案出願第11/305,053号に対する優先権と、該出願の利益とを請求し、その開示全体が、参照により本明細書内に組み込まれる。
【0002】
発明の分野
本発明は、一般には、制御可能に作動させることが可能な小型プラットフォームに関し、特に、様々な実施形態において、小型ミラーを含む制御可能に作動させられる小型プラットフォームアセンブリに関するシステム、方法、及び装置に関する。
【背景技術】
【0003】
バーコードリーダ、カメラ、プロジェクションテレビ、内視鏡、及び腹腔鏡のような走査光学ビーム技術は、光学ビームを導くために、微小電気機械(MEMS)ミラーのような小型の電気的・機械的ミラーを頻繁に用いる。MEMSミラーは、典型的には、高電圧の静電式のか、電熱式のか、圧電式のか、又は電磁式の操作を利用する。それら操作は全て、典型的には、該ミラーに取り付けられた電気的なワイヤを必要とする。これらワイヤは、光学ビームを遮断する可能性があり、ある特定の光学的設計を妨げる。更に、高電圧は、安全ではないと考えられ、医療装置のようなある特定用途の場合には信頼することが出来ない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
医療用の従来の代替的な走査装置は、光ファイバを用いて、光を持ち込み、そのリターン信号を収集する。これらの装置は、典型的には、該装置内において光ファイバを回転させて、走査した画像を取得する。回転軸についての円形走査を形成するための1つの現在のアプローチは、光ファイバを回転させるために外部モータによって駆動させられた回転する機械式のリンク機構を用いる。このアプローチは、幾つかの欠点を被る。1つの欠点は、その回転する機械式リンク機構が、典型的には、光学ロータリーコネクタとして知られるような高価な構成要素を必要とすることである。別の欠点は、狭い口径(<2mm)の走査機器の場合に、該機器の機械式の連結(トレイン)の剛性が、光ファイバの均一な回転を保証するには不十分であることである。光ファイバの不均一な回転は、不均一回転歪(Non-Uniform Rotation Distortion:NURD)として知られる画像の歪みをまねく結果となる。更なる欠点は、このアプローチが、単軸走査を生じさせることである。
【0005】
従って、小型の光学走査装置を提供するための改善されたアプローチが、必要とされている。
【課題を解決するための手段】
【0006】
本発明の要約
本発明は、様々な実施形態において、複数軸に沿って制御可能に作動させられる小型プラットフォームに関する改善されたシステム、方法、及び装置を提供することによって、先行技術の欠陥(不備)に対処する。幾つかの実施形態によれば、小型ミラーを、そのようなプラットフォーム上に実装することができるか、そのようなプラットフォーム上に形成することができるか、そのようなプラットフォームに統合されるように形成することができるか、又はそのようなプットフォームから形成することができる。幾つかの構成によれば、本発明のプラットフォームを、回転するように作動可能にすることもできる。1つの利点によれば、本発明の小型の作動可能なプラットフォームは、磁性駆動を用い、(典型的には、約2ボルト未満の)低電圧を使用し、該プラットフォームに取り付けられる電気的ワイヤを必要としない。別の利点によれば、光ファイバの機械的な回転はもはや必要とせず、該光ファイバが静止したままとすることができる一方で、反射性の表面を有するプラットフォームが動かされる。
【0007】
一態様によれば、本発明は、小型の操作可能に可動な支持構造を提供し、該支持構造は、プラットフォーム、支持エレメント、及び磁気ベアリングを含む。概して、磁気ベアリングは、プラットフォームと支持エレメントとの間に配置されて、支持エレメントとプラットフォームとの間において磁気的に高められたピボットインターフェースを提供する。幾つかの構成において、プラットフォームは、対向したほぼ円形の第1及び第2の表面を有する円筒形ディスクとして形づくられる。代替的には、プラットフォームと該第1及び第2の表面とは、任意の適合可能な形状を有することができる。一構成によれば、プラットフォームは、約0.3mm〜約5cmの間の外側直径と、約0.02mm〜約5mmの間の高さ/厚みとを有する。様々な他の構成において、可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる構成によれば、可動プラットフォームは、約5mmか、2.5mmか、1mmか、0.5mmか、0.25mmか、0.1mmか、50μmか、25μmか、10μmか、又は5μm、未満の厚み/高さを有する。
【0008】
プラットフォームには、該プラットフォームの第1の表面内に(例えば表面下に)形成されたキャビティを含めることができる。該キャビティは、内面を含む。該内面は、磁気ベアリングに接触する。該キャビティは、任意の適合可能な幾何学形状とすることができ、該幾何学形状は、半球形か、長方形か、円錐形か、又はv型形状を含む(但しこれらに限定されない)。追加的には、該キャビティを、中心に配置することができるか、又はプラットフォームの直径/幅の一部か又は全体に沿って延在させることができる。代替的には、プラットフォームを、いかなるキャビティも無く、設計することもできる。
【0009】
1つの特徴によれば、キャビティの内面は、ほぼ平滑である。別の特徴によれば、キャビティの内面は、強磁性材料から形成されるか、又は磁気ベアリングの極性とは反対の極性で磁化され、その結果、該磁気ベアリングと、該キャビティの内面とが、互いに引き寄せ合うこととなる。一構成によれば、プラットフォームの全体か又はほぼ全体が、硬質磁性材料か又は強磁性材料から形成される。しかしながら、別の構成によれば、プラットフォームは、非磁性の引き寄せ材料から形成され、該プラットフォームに取り付けられたか又は該プラットフォーム内へと形成された1つか又は複数の磁石を有する。
【0010】
1つの特徴によれば、プラットフォームとベアリングとの間における磁気的な引き寄せは、支持エレメントに対するプラットフォームの回転軸上に置かれる及び/又は回転させられる配向とは無関係に、キャビティの表面と磁気ベアリングとの間の接触を保つ。この特徴の結果として、プラットフォームと磁気ベアリングとの間の接触を失うこと無く、プラットフォームと、磁気ベアリングと、支持エレメントとの組み合わされた構成を、3次元空間に対する任意の所望の配向へと、回転させ且つ動かすことができる。更なる特徴によれば、プラットフォームと磁気ベアリングとの間の磁気的な相互作用は、支持エレメントのベアリング上のプラットフォームをセンタリングさせるように作用するバネ復元力を形成する。
【0011】
別の特徴によれば、プラットフォームの第2の表面(例えば上面)は、反射性であるか、又は反射性である一部分を含む。代替的には、第2の表面は、反射性コーティングを含むことができるか、或いは反射性構成要素を第2の表面に実装することができる。一構成において、第2の表面が、ほぼ平坦である。しかしながら、別の構成では、第2の表面は、任意の適合可能な形状とすることができ、該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但しこれらに限定されない)。
【0012】
一実施形態によれば、支持エレメントは、非磁性体であり、円錐形に形づくられており、約0.1mm〜約100mmの間の高さを有する。しかしながら、代替の実施形態において、支持エレメントは、任意の適合可能な形状を有することができる。1つの特徴によれば、磁気ベアリングを受容するために、凹形のゆりかごのようなレセプタクルを、一端部において支持エレメントが含む。磁気ベアリングは、該レセプタクル内において回転可能とすることができるか、又は該レセプタクル内において位置的に固定されることが可能である。他の構成によれば、磁気ベアリングは、任意の適合可能な幾何学形状とすることができ、該幾何学形状は、球形か、半球形か、又は円錐形状を含む(但しこれらに限定されない)。磁気ベアリングはまた、比較的軟質か又は硬質とすることができるか、或いは、比較的軟質か又は硬質な外殻を含むことができる。追加的には、支持エレメントの端部には、レセプタクルが無いものを含めることができ、その代りに、磁性材料を含めることができ、プラットフォームの第1の表面を引き寄せて接触するよう適合可能に形づくられる。例示を目的として、前記端部を、尖っていない先端か又は鋭い先端を有する円錐形に形づくることができる。
【0013】
動作中、磁気ベアリングか、又は支持エレメントの先端は、ピボットとして作用し、該ピボットの周囲において、プラットフォームは、任意の方向に傾くことが自由である。幾つかの実施形態において、例えば支持エレメントの長手方向の軸の周りを、プラットフォームはまた回転することもできる。1つの特徴によれば、プラットフォームの付近の支持エレメントの幅と共に、該プラットフォーム内のキャビティの寸法及び形状が、該プラットフォームと該支持エレメントとの間における利用可能な偏向の最大角を決定する。
【0014】
更なる一態様において、本発明は、磁気プラットフォームアクチュエータを含む。一実施形態において、磁気プラットフォームアクチュエータは、4つのコイルとベースとを備える。しかしながら、磁気プラットフォームアクチュエータには、任意の所望の数のコイルを含むめることもできる。一実施例によれば、該コイルは、プラットフォームを傾けるための制御された手法において駆動される。より具体的には、ある特定のコイルに電流を提供することが、磁界を形成させ、その磁界が、プラットフォームを引き寄せることにより、該プラットフォームが、該特定のコイルに向かうようにか又は離れるように傾斜させられる。より一般的には、個々のコイルか又はコイルの組み合わせに対して電流を提供することにより、プラットフォームが、所望の方向に傾斜させられる。例えば、コイルを、対(ペア)で動作させて、プッシュ・プル(押し・引き)のトルクを提供することができる。一実施形態によれば、プラットフォームは、反射性の表面を有し、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、コイルに対する電流駆動を調整することにより、該反射性の表面を、制御可能に位置付けることができる。
【0015】
更なる一実施形態によれば、前記電流駆動が、連続的にコイルを掃引することができ、それにより、プラットフォームが、各連続的なコイルに向って連続的に傾斜させられて、円形の走査運動が形成される。追加的には、コイルの連続的な掃引ごとに、電流の強度を変化させることによって、任意の所望サイズの連続的なラスター走査を達成させることができる。走査中に電流の強度を変化させることによってもまた、任意の所望の形の走査を達成することができる。
【0016】
一構成によれば、磁気プラットフォームアクチュエータは、プラットフォームのミラー側の付近に配置される。しかしながら、代替の一構成によれば、該磁気アクチュエータを、任意の適合可能な位置に配置することもできる。一構成によれば、コイルは、互いに平行に配置され、磁気プラットフォームアクチュエータのベースの周囲に沿って均等に隔置される。しかしながら、代替の構成において、該コイルを、ベース上のか又はベースに対する、任意の適合可能な配置に、位置付けることもできる。追加的には、用途に依存して、任意の所望パターンにおいてか、或いはランダムか又はほぼランダムなパターンにおいてコイルを掃引することができる。
【0017】
別の態様によれば、本発明は、プラットフォーム、支持構成、ジンバル(回転台)、及び磁石を含む、小型のジンバルプラットフォームアセンブリを提供する。この態様によれば、単一ジンバルプレートを有するのでは無く、このアセンブリのジンバルは、第1、第2、及び第3のプレートを含み、同心のトロイドとして構成され、該第1のプレートが、最も内側のトロイドになっており、該第2のプレートが、次のトロイドになっており、最も外側の第3のプレートにより続けられる。
【0018】
1つの特徴によれば、小型のジンバルプラットフォームアセンブリは、2対の回転たわみ部を含む。たわみ部の第1の対は、第1の軸(例えば、x軸)に概して沿って延在し、ジンバルの最も内側のプレートを、ジンバルの中間プレートに対して、回転可能に相互接続する。同様に、回転たわみ部の第2の対は、第1の軸に垂直な第2の軸(例えば、y軸)に概して沿って延在し、ジンバルの中間プレートを、ジンバルの最も外側のプレートに対して、回転可能に相互接続する。たわみ部の第1の対は、最も内側のプレートに対して、中間プレートが、x軸の周りを回転することが可能となるように寸法が合わされて形づくられる。たわみ部の第2の対は、中間プレートと最も外側のプレートとが、互いに関連してy軸の周りを回転することが可能となるように寸法が合わされて形づくられる。
【0019】
1つの特徴によれば、回転たわみ部は、約1μm〜10μmの間の幅と、約10μm〜約100μmの厚み/深さとを有して、そのような相対運動を可能にする。一構成において、たわみ部の幅は、約6μmであり、たわみ部の厚み/深さは、約50μmである。別の特徴によれば、回転たわみ部は、約250Hz〜約750Hzの共振周波数を有する。一実施例において、回転たわみ部は、約500Hzの共振周波数を有する。更なる特徴によれば、プレートは、約100μm〜約750μmの間の厚みを有する。別の構成において、プレートは、約400μmの厚みを有する。一構成において、たわみ部の両セットに沿った内側、中間、及び外側のプレートは、シリコンからの一枚に形成される。一構成によれば、ジンバルの最も外側のプレートは、約500μm〜約2mmの間の、外側の直径を有する。
【0020】
一実施形態によれば、本発明のこの態様の支持構成は、ベース、遷移部、及び支柱を備える。該遷移部は、ベース内の中心位置の外に軸方向に延在し、該遷移部がベースから離れるように延びるにつれてより小さく先細りにされる直径を有する。該支柱は、遷移部の外に軸方向に延在し、遷移部が、該支柱のための高められた構造上の支持を提供する。該支柱は、第1及び第2のセクションを含む。該支柱の第2のセクションは、第1のセクションに対して削減された直径を有し、第1のセクションと第2のセクションとの間の遷移において放射状に延在するショルダー部が形成されている。
【0021】
更なる一実施形態によれば、最も内側のジンバルプレートは、中心に位置付けられたスルー開口部を有し、支柱における削減された直径セクション上に、滑らすことが可能な状態で嵌合し、これにより、プレートが、該支柱のショルダー部上に隣接させられ且つ設置させられる。支柱における削減された直径セクション上に、キャップが嵌合して、ジンバルを支柱上にロックさせる。幾つかの実施形態によれば、ジンバルは、支柱における削減された直径セクションの周囲を回転可能である。他の実施形態において、ジンバルは、削減された直径セクションに対して、回転するように固定される。
【0022】
一実施形態によれば、本発明のこの態様の磁石はまた、トロイド形状にされており、放射状に内部に延びるショルダー部を有する内壁を含む。該磁石がジンバル上に実装され、これにより、ショルダー部が、最も外側のジンバルプレートの外側の周辺に隣接することとなり且つ該周辺によって支持されることとなる。一構成によれば、壁は、最も外側のジンバルプレートを支持ベースに向って通り越して、軸方向に延在する。
【0023】
更なる実施形態によれば、小型ジンバルプラットフォームアセンブリのプラットフォームは、対向したほぼ円形の第1の表面(例えば上面)及び第2の表面(例えば底面)を有したほぼ円筒形のディスク形状を有する。一構成によれば、プラットフォームの第2の表面は、トロイド状の磁石の頂上に実装される。プラットフォームは、約0.3mm〜約5cmの間の、外側の直径を有し、約0.3mm〜約5cmの間の高さを有する。様々な他の構成において、可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる構成によれば、プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の高さを有する。1つの特徴によれば、プラットフォームの表面は、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもでき、任意の適合可能な多角形か又は卵形の形状を有することを含む(但しこれらに限定されない)。
【0024】
別の特徴によれば、プラットフォームの第1の表面(例えば上面)は、反射性であるか、又は反射性である一部分を含む。代替的には、表面は反射性コーティングを含むことができるか、或いは、他の処置を含むことができる。追加的には、表面は、ほぼ平坦とすることができるか、又は任意の適合可能な形状とすることもできる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及びファセット部分の任意の適合可能な組み合わせを含む(但し、これらに限定されない)。代替的な構成において、ジンバル上に実装された磁石を用いるのでは無く、例えばプラットフォームの底面上において、ジンバル上に実装された磁石をアセンブリが含む。代替的には、磁性コーティングを、プラットフォームの底側に適用することができるか、或いは、この表面を、磁気的にチャージされた材料から形成することができる。
【0025】
1つの特徴によれば、小型ジンバルアセンブリのプラットフォームは、x及びy軸の周りの3次元空間内において制御可能に動かすことができる。追加的には、該プラットフォームは、z軸の周りに回転させることができる。上述の磁気プラットフォームアクチュエータに類似するように、磁気プラットフォームアクチュエータを用いることによって、ジンバルプラットフォームアセンブリを作動させることができる。
【0026】
別の態様によれば、本発明は、中心に配置された支柱に対してでは無く、静止した外側フレームに対して移動可能なプラットフォームを有する小型の作動可能に移動可能なジンバルプラットフォームアセンブリを提供する。この態様によれば、ジンバルプラットフォームアセンブリは、プラットフォーム、外側フレーム、少なくとも1対の回転たわみ部、及び支持構成を備える。
【0027】
一構成によれば、プラットフォームが、フレーム内において、一対の回転たわみ部によってつるされる。一実施形態によれば、回転たわみ部は、プラットフォーム及びフレームの対向する側面上において、直径に沿って位置合わせされる。一実施形態において、プラットフォームは、回転たわみ部の周辺を回転するが、フレームは、静止したままである。しかしながら、他の実施形態において、フレームを、更なる支持構成に回転可能に結合することもまたできる。一構成において、フレームは、該フレームに対するプラットフォームの回転軸とは垂直な軸に沿って支持構成に対して回転する。
【0028】
一実施形態によれば、前記アセンブリは、フレームに取り付けられたか又はフレームに統合されるように形成された2つのスピンドルを含む。一構成において、スピンドルが、支持構成上のレセプタクルに嵌合することにより、該支持構成に対してフレームが回転することが可能になる。代替的な一構成によれば、スピンドルは、支持構成上に配置され、レセプタクルは、フレーム上に配置される。別の実施形態によれば、フレームと支持構成とを回転可能に結合させるために、スピンドル及びレセプタクルでは無く、たわみ部の第2の対を使用することができる。
【0029】
更なる実施形態によれば、前記アセンブリは、プラットフォームに取り付けられた磁石を含む。該磁石は、ほぼ平坦とすることができるか、又は任意の適合可能な形状とすることができる。追加的には、磁石は、プラットフォームの表面の一部分のみを覆うことができるか、又はプラットフォームの表面全体を覆うことができる。代替の一実施形態によれば、アセンブリには、プラットフォームの表面に取り付けられた複数の磁石を含めることができる。更なる実施形態によれば、プラットフォームにはまた、反射性構成要素を含めることもできる。
【0030】
更なる一態様によれば、本発明は、任意の上述のプラットフォームの傾きに関するフィードバックを提供するために、プラットフォームの位置検知システムを提供する。プラットフォーム位置検知システムは、磁気センサを備える。一実施例によれば、該磁気センサは、磁界に基づいて、プラットフォームの2軸の傾きを測定することが可能なホール効果センサである。プラットフォームが、x軸及びy軸の周りを回転すると、ホール効果センサが、プラットフォームの軸の傾きを測定する。一実施形態によれば、磁気センサは、2軸磁気センサである一方で、代替の一実施形態によれば、磁気センサは、3軸磁気センサである。
【0031】
一実施例によれば、位置検知システムは、ラスター走査のためのターゲットポイントを、プラットフォームについての対応する傾斜角度に変換する。傾斜角度制御回路構成が、対応するコマンドを駆動回路に対して提供し、該駆動回路が、対応する駆動電流をプラットフォーム位置決めコイルに対して更に提供する。駆動電流を変更することが、該位置決めコイルの磁界を調整し、所望のプラットフォームの傾きが提供される。ホール効果センサは、傾けられたプラットフォームにより結果として形成された磁界を検知して、実際のプラットフォームの傾きを決定する。この情報は、傾斜角度制御回路構成にフィードバックされ、該傾斜角度制御回路構成が、次いで、駆動回路に対するコマンドを再調整する。
【0032】
本発明の更なる態様、実施形態、構成、及び特徴が、様々な例示的な実施形態と、添付図面に対する参照とに関して後述される。
【実施例】
【0033】
例示的な実施形態の説明
本発明の全体的な理解を提供するために、改善された制御可能に作動させることが可能な小型プラットフォームを提供するためのシステム、方法、及びデイバスを含むある例示的な実施形態が、次に説明される。
【0034】
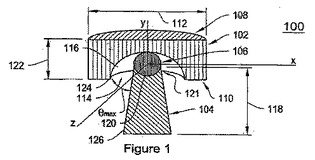
本発明の例示的な一実施形態による、小型の支持構成100の断面図を図1は示す。図4に関して更に詳細に後述されるように、小型の制御可能に作動させられるミラーシステムを含む様々な用途において、該小型の支持構成100を用いることができる。ミラー支持構成100は、プラットフォーム102、支持エレメント104、及び球形の磁気ベアリング106を含む。概して、その例示的な実施形態によれば、支持エレメント104とプラットフォーム102との間において磁気的に高められたピボットを提供するために、磁気ベアリング106が、プラットフォーム102と支持エレメント104との間に配置される。
【0035】
その例示的な実施形態によれば、プラットフォーム102は、対向したほぼ円形の表面108及び110を有したほぼ円筒形のディスク形状を有する。プラットフォーム102は、約0.3mm〜約5cmの間の外側直径112と、約0.01mm〜約1cmの間の高さ/厚み122とを有する。様々な他の構成において、その可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる例示的な構成によれば、プラットフォームは、約1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、0.1mmか、0.05mmか、0.025mmか、又は0.01mm、未満の高さ/厚みを有する。
【0036】
プラットフォーム102は、表面110内へと形成された半球形のキャビティ114を含む。キャビティ114は、内面116を含む。該内面116は、磁気ベアリング106に、移動可能な状態で接触する。表面108及び110は、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもできる。該幾何学形状は、任意の適合可能な多角形か又は卵形の形状を含む(但しこれらに限定されない)。更に、キャビティ114は、ほぼ半球形になっているように図示されているが、該キャビティ114もまた、任意の適合可能な幾何学形状を有することができる。該幾何学形状は、長方形か、円錐形か、又はv型形状を含む(但しこれらに限定されない)。追加的には、キャビティ114を、中心に配置することができるか、又はプラットフォーム102の直径/幅の一部か又は全体に沿って延在させることができる。代替的には、プラットフォーム102を、いかなるキャビティ114も無く、設計することができる。
【0037】
キャビティ114の内面116は、ほぼ平滑であり、その例示的な実施形態によれば、強磁性材料から形成されるか、又は幾つかのケースでは、磁気ベアリング106の極性とは反対の極性で磁化されて、その結果、該ベアリング106と、該内面116とが、互いに引き寄せ合う。図4に関して更に詳細に後述されるように、プラットフォーム102の表面108は、反射性とすることができるか、又は反射性である一部分を含むことができる。代替的には、表面108は反射性コーティングを含むことができるか、或いは、反射性構成要素が表面108に実装されることが可能である。表面108は、ほぼ平坦になっているように示されているが、該表面108は、任意の適合可能な形状とすることもできる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但し、これらに限定されない)。
【0038】
例示的な実施形態によれば、支持エレメント104は、非磁性体であり、円錐形に形づくられており、約0.2mm〜約1cmの間の高さ118を有する。しかしながら、代替の例示的な実施形態において、支持エレメント104は、任意の適合可能な形状を有することもできる。支持エレメント104の1つの特徴は、磁気ベアリング106を受容するための、凹形のゆりかごのようなレセプタクル120を、端部121において該支持エレメント104が含むことである。幾つかの例示的な実施形態によれば、磁気ベアリング106は、該レセプタクル120内において回転可能である。他の例示的な実施形態において、磁気ベアリング106は、該レセプタクル内において位置的に固定される。磁気ベアリング106は、ほぼ球形になっているように図示されているが、該磁気ベアリング106は、任意の適合可能な幾何学形状とすることもできる。該幾何学形状は、半球形か、円錐形か、円筒形か、又はナイフエッジ形状を含む(但し、これらに限定されない)。磁気ベアリング106は、パーマロイか、CoFeか、又は合金1010鋼のような軟質磁性材料を含むことができるか、或いは、磁気ベアリング106は、SmCoか、NdFeBか、AlNiCoか、又はフェライトのような硬質磁性材料を含むことができる。他の例示的な実施形態において、端部121には、レセプタクルが無い状態を含めることができ、その代りに、磁気的にチャージされ且つ適合可能に形づくられて、表面116を引き寄せて移動可能に該表面116に接触することが可能である。例示を目的として、端部121を、比較的尖っていない先端か又は鋭い先端を有する円錐形に形づくることができる。
【0039】
プラットフォーム102は、磁気ベアリング106及びその支持エレメント104の頂上に置かれるように図示されている。磁気ベアリング106は、ピボットとして作用し、該ピボットの周囲において、プラットフォーム102は、任意の方向に自由に傾くことができる。更なる例示的な実施形態によれば、支持エレメント104の長手方向の軸(すなわち、y軸)の周りを、プラットフォーム102はまた回転することもできる。
【0040】
上述のように、キャビティ114の内面116は、磁気的に極性化されることが可能である。幾つかの例示的な実施形態において、プラットフォーム102の全体か又はほぼ全体を、磁化された材料から形成することができる。しかしながら、他の例示的な実施形態において、プラットフォーム102は、磁性体でないことが可能であるか、或いは、該プラットフォーム102に取り付けられたか又は該プラットフォーム102内へと形成された1つか又は複数の磁石を有する非磁性の引き寄せ材料から形成されることが可能である。
【0041】
例示的な一実施形態によれば、プラットフォーム102と磁気ベアリング106とが、両方とも磁石として構成されて、例えば、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な硬質磁性材料から形成される。支持エレメント104は、非磁性体であり、該支持エレメント104を、例えば、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構成することができる。
【0042】
動作中(図4に関して更に詳細に説明されるように)、磁気ベアリング106がキャビティ114の内面116に接触する位置の周りの3次元空間内において、プラットフォーム102は、制御可能に回転軸上に置かれることが可能である。磁気ベアリング106は、磁気的にプラットフォーム102を引き寄せて、支持エレメント104に対するプラットフォーム102の回転軸上に置かれる及び/又は回転させられる配向とは無関係に、半球形の表面116と、磁気ベアリング106との間の接触を維持する。1つの例示的な実施形態によれば、プラットフォーム102とベアリング106とは、両方とも永久磁石を含み、プラットフォーム102とベアリング106との間の磁気的な相互作用が、支持エレメント104のベアリング106上のプラットフォーム102をセンタリングさせるように作用する磁気的なバネ復元力を形成する。
【0043】
1つの特徴によれば、キャビティ114は、周辺エッジ124を有し、支持エレメント104は、外側表面126を有する。プラットフォーム102がy軸(すなわち、支持エレメント104の長手方向の軸)に垂直である時には、キャビティ114の周辺エッジ124と、支持エレメント104の外側表面126との間の距離が、プラットフォームの傾きの最大角、すなわちθmaxを画定する。θmaxを、様々なキャビティ114及び/又は支持エレメント104の形状寸法(ジオメトリ)を用いることによって調整することができる。θmaxを増大させるために、例えば、支持構成104の幅を狭めることができ、及び/又は、キャビティ114の幅/直径を拡大させることができる。
【0044】
1つの特徴によれば、構成100全体の配向とは無関係に、ベアリング106とプラットフォーム102との間の磁気的な引き寄せが、磁気ベアリング106とプラットフォーム102との間の接触を維持させるので、プラットフォーム102と、磁気ベアリング106と、支持エレメント104とが組み合わされた構成100を、3次元空間に対して、任意の所望な配向に、回転させて動かすことができる。
【0045】
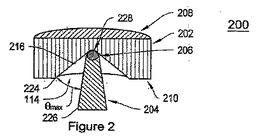
図2は、本発明の別の例示的な一実施形態による、図1の支持構成100に類似した小型の支持構成200の断面図であるが、該支持構成200は、円錐形のプラットフォームキャビティ214を有している。該小型の支持構成200を、図4に関して更に詳細に後述されるように小型の制御可能に作動させられるミラーシステムを含む様々な用途において用いることができる。該小型の支持構成200は、プラットフォーム202、支持エレメント204、及び球形の磁気ベアリング206を含む。その例示的な実施形態によれば、プラットフォーム202は、対向した表面208と210とを有したほぼ円筒形のディスク形状を有する。表面208は、ほぼ円形であるが、表面210は、ほぼ環状である。プラットフォーム202は、図1のプラットフォーム102に類似している。しかしながら、プラットフォーム202は、表面210内へと形成された円錐形のキャビティ214を含む。キャビティ214は、内面216を含む。内面216は、磁気ベアリング206に、移動可能な状態で接触する。内面216は、図1の内面116に類似している。追加的には、支持エレメント204及び磁気ベアリング206が、図1の支持エレメント104及び磁気ベアリング106に類似している。図1の構成100に類似して、磁気ベアリング206は、ピボットとして作用し、該ピボットの周囲において、プラットフォーム202は、任意の方向に自由に傾くことができる。
【0046】
キャビティ114の場合のように、キャビティ214は、周辺エッジ224を有しており、支持エレメント204は、外側表面226を有する。キャビティ214の周辺エッジ224と、支持エレメント204の外側表面226との間の距離が、プラットフォームの傾きの最大角、すなわちθmaxを画定する。θmaxを、キャビティ214のサイズを変更することによってか、或いは、キャビティ214及び/又は支持エレメント204の様々な形状寸法(ジオメトリ)を用いることによって、調整することができる。図2の例示的な実施形態の利点の1つは、円錐形のキャビティ214の頂点228内における磁気ベアリング206の動きが、半球形のキャビティ114の内面116に沿ったベアリング106の動きよりも制限されることである。この特徴が、構成200に対して更なる安定性を提供する。
【0047】
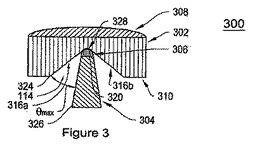
図3は、本発明の別の例示的な実施形態による、図2の実施形態200に類似した支持構成300の断面図であるが、該支持構成300は、V型形状のプラットフォームキャビティ314とナイフエッジ磁気ベアリング306とを有している。その小型の支持構成300を、図4に関して更に詳細に後述されるように小型の制御可能に作動させられるミラーシステムを含む様々な用途において用いることができる。該小型の支持構成300は、プラットフォーム302、支持エレメント304、及び延長されたナイフエッジ形状の磁気ベアリング306を含む。その例示的な実施形態によれば、プラットフォーム302は、対向した表面308と310とを有したほぼ円筒形である。表面308は、ほぼ円形であるが、表面310は、ほぼ環状である。プラットフォーム302は、図1及び図2のプラットフォーム102及び202にそれぞれ類似している。しかしながら、中心に位置付けられた半球形114か又は円錐形214のキャビティを有するのではなく、プラットフォーム302は、表面310内へと形成された、直径に沿って延在するv型形状のキャビティ314を含む。キャビティ314は、2つの内面316aと316bとを含み、それらが交差して、直径に沿って延在する頂点328を形成する。ナイフエッジ磁気ベアリング306は、直径に沿って延在する頂点328内において設置される。矢印330a及び330bによって示されているように、図3の実施形態300と、図1及び図2の実施形態100及び200のそれぞれとの間の重要な動作上の差異は、プラットフォーム302の動きが、単一軸か、又は直径に沿って延在する頂点328の周囲の回転に、制限されることである。幾つかの実施形態において、v型形状のキャビティ314は、310の直径全体を横切って延在する。しかしながら、他の実施形態において、v型形状のキャビティは、直径の一部に沿ってのみ延在する。
【0048】
ナイフエッジベアリング306とv型形状のキャビティ114によって課せられたピボット制限とは別の、支持構成300の残りの特徴は、支持構成100及び200の特徴とほぼ同じである。具体的には、内面316a及び316bは、キャビティ114の内面116に類似している。支持エレメント304もまた、支持エレメント104とほぼ同じである。しかしながら、レセプタクルを含むのでなく、ナイフエッジベアリング306が、支持エレメント304上のほぼ平坦な表面320に実装される。先行する例におけるように、キャビティ314は、周辺エッジ324を有し、支持エレメント304は、外側表面326を有し、それらの形状寸法(ジオメトリ)が共にプラットフォームの傾きの最大角、すなわちθmaxを画定する。
【0049】
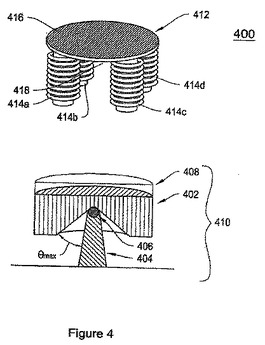
図4は、本発明の例示的な一実施形態による、小型の作動可能なプラットフォームシステム400の断面図である。システム400は、特に、反射器/ミラーの位置決めに関して記されているが、任意の用途に関して該システム400を使用することもできる。システム400は、小型プラットフォーム402及び支持構成410と、磁気プラットフォームアクチュエータ412とを含む。システム400はまた、反射器408も含む。該反射器408を、プラットフォーム402とは分離されるようにか、又はプラットフォーム402と統合されるように、形成することができる。
【0050】
例示的な実施形態によれば、磁気プラットフォームアクチュエータ412は、4つのコイル414a〜414dと、ベース416とを備える。しかしながら、磁気プラットフォームアクチュエータ412には、任意の所望の数のコイルを含めることもできる。動作中、該コイル414a〜414dは、プラットフォーム202を動かすための制御された手法において電流によって駆動される。より具体的には、電流を、個々のコイル414a〜414dか又はコイルの組み合わせに提供することによって、プラットフォーム202が、所望の方向に傾斜させられる。例えば、コイルを、コイル414aと414cのように、対で(ペアで)動作させて、プッシュ・プル(押し・引き)のトルクを提供することができる。
【0051】
コイル414a〜414dに対する電流駆動を調整することにより、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、反射器408を、制御可能に配置することができる。例えば、電流駆動が、連続的にコイル414a〜414dを掃引することができ、それにより、プラットフォーム202が、各連続的なコイルに向って連続的に傾斜させられて、円形走査運動が形成される。代替的には、1つの軸に対して正弦波か又は矩形波を印加させる一方で、鋸歯状波形か又は三角波形によって第2の軸に対する電流をゆっくりと傾斜させることにより、ラスター走査を達成させることができる。コイル414a〜414dを、対で動作させて、2つの直交軸の周辺にトルクを生じさせることができる。正弦波と余弦波か、或いは90度だけ位相シフトさせられた矩形波のような、90度位相がずれた電流波形によって、これらの2つのコイル対を駆動させることにより、円形走査(全周走査)を達成させることができる。駆動電流の振幅を変化させて、円形走査のサイズか又は最大角を変更することができる。追加的には、コイル414a〜414dの連続的な掃引中、及び/又は連続的な掃引ごとに、電流の強度を変更することによって、任意の所望の形の連続的なラスター走査を、達成することができる。
【0052】
磁気プラットフォームアクチュエータ412は、プラットフォーム402のミラー側408の付近に配置されているように示されているが、該磁気アクチュエータ412を、小型のミラー支持構成410のプラットフォーム402の支持側404の付近を含む任意の適合可能な位置に配置することもできる。同様に、コイル414a〜414dは、互いに平行に配置されており、ベース416の周辺に沿って均等に隔置されているが、該コイル414a〜414dを、ベース416上の任意の適合可能な配置に位置付けることもできる。例示的な実施形態によれば、コイル414a〜414dは、銅で構成される。しかしながら、それらを、任意の適合可能な導体から作ることもできる。追加的には、用途に依存して、任意の所望のパターンにおいてか、或いはランダムか又はほぼランダムなパターンにおいて、コイル414a〜414dを掃引することができる。
【0053】
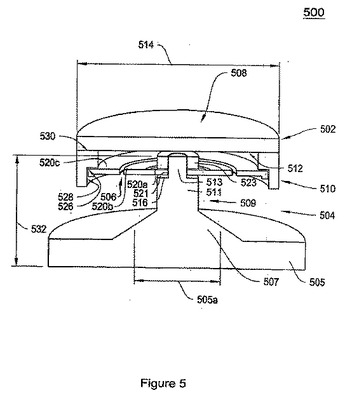
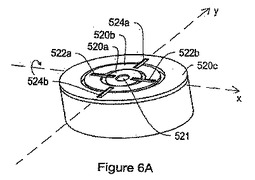
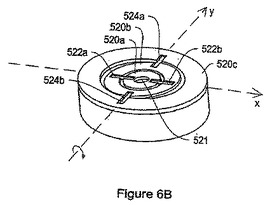
図5は、本発明の別の例示的な実施形態による、回転軸上に置かれている2つの軸プラットフォームのためのジンバルプラットフォームアセンブリ500の断面図である。ジンバルミラーアセンブリ500は、プラットフォーム502、支持構成504、ジンバル506、及び磁石510を備える。図6A及び図6Bは、図5のジンバル506及び磁石510の概念的な上面斜視図である。図7Aは、ジンバル506の上面図である。図5〜7Aを参照すると、この例示的な実施形態によれば、(単一プラットフォーム102及び202に類似する)単一ジンバルプレートを有するのではなく、プラットフォームアセンブリ500のジンバル506は、第1のプレート520a、第2のプレート520b、及び第3のプレート520cを含み、同心のトロイドとして構成され、該第1のプレート520aが、最も内側のトロイドになっており、該第2のプレート520bが、次のトロイドになっており、最も外側の第3のプレート520cによって続けられる。
【0054】
図6A〜図7Aに示されるように、アセンブリ500は、回転たわみ部の2つの対を含む。回転たわみ部522aと522bとの第1の対は、x軸に概して沿って延在して、最も内側のプレート520aを、中間プレート520bに対して、回転可能に相互接続する。同様に、回転たわみ部524aと524bとの第2の対は、y軸に概して沿って延在して、中間プレート520bを、最も外側のプレート520cに対して、回転可能に相互接続する。例示的な実施形態によれば、プレート520a〜520cと、たわみ部522a、522b、524a、及び524bとを含むジンバル506は、シリコンからの一枚に構築される。しかしながら、代替の例示的な実施形態によれば、任意の適合可能な材料を使用することもできる。
【0055】
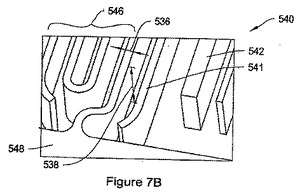
図7Bは、たわみ部524aに類似した折り重ねられたたわみ部540の一部の拡大図である。たわみ部540は、部分的に組み立てられているだけであり、依然として基板に取り付けられている。追加的には、エッチングバッファ541及び側面ストップ542(これらは最終的には取り除かれることになる)と呼ばれる他のエッチングされた特徴(機能)を見ることができる。エッチングバッファ541は、ディープな反応のイオンエッチングのプラズマエッチング処理の均一性を改善するために使用される。側面ストップ542は、衝撃か又は振動に起因したプラットフォーム548及びたわみ部546の動きを制限するために使用される。様々な例示的な実施形態によれば、回転たわみ部522a−522b及び524a−524bは、約1μm〜約10μmの間の幅と、約10μm〜約100μmの厚み/深さとを有して、そのような相対運動を可能にする。図7B内に示されるように、一構成において、たわみ部522a−522b及び524a−524bの幅536は、約6μmであり、たわみ部522a−522b及び524a−524bの厚み/深さ538は、約50μmである。その例示的な実施形態によれば、回転たわみ部522a−522b及び524a−524bは、プラットフォーム502と磁石510とを支持している時には、約250Hz〜約750Hzの共振周波数を有する。例示的な一構成において、回転たわみ部522a−522b及び524a−524bは、約500Hzの共振周波数を有する。例示的なプレート520a〜520cは、約20μm〜約750μmの間の厚みを有する。例示的な一構成において、プレート520a〜520cは、約400μmの厚みを有する。一構成において、たわみ部522a−522b及び524a−524bの両セットに沿った内側プレート520a、中間プレート520b、及び外側プレート520cは、シリコンからの一枚に形成される。一構成によれば、ジンバルの最も外側のプレート520cは、約500μm〜約2mmの間の、外側の直径を有する。
【0056】
支持構成504は、ベース505、遷移部507、及び支柱509を備える。例示的なベース505は、ほぼ円形であるが、これはそうである必要が無い。遷移部507は、ベース505内の中心位置の外に軸方向に延在し、該遷移部がベース505から離れるように延びるにつれてより小さく先細りにされる直径505aを有する。支柱509は、遷移部507の外に軸方向に延在する。その先細りにされる遷移部507が、支柱509のための高められた構造上の支持を提供する。支柱509は、第1のセクション511と、第2のセクション513とを含む。第2のセクション513は、第1のセクション511に対して削減された直径を有し、第1のセクション511と第2のセクション513との間の遷移において放射状に延在するショルダー部516が形成されている。
【0057】
最も内側のプレート520aは、中心に配置されたスルー開口部521を有し、支持エレメント509における削減された直径セクション513上に、滑らすことが可能な状態で嵌合し、これにより、プレート520aが、ショルダー部516上に隣接させられ且つ設置させられる。削減された直径セクション513上に、キャップ523が嵌合して、ジンバル506を支持エレメント509上にロックさせる。幾つかの例示的な実施形態によれば、ジンバル506は、支柱509における削減された直径セクション513の周囲を回転可能である。
【0058】
しかしながら、図5〜図6Bの例示的な実施形態によれば、最も内側のプレート522aは、支柱509上に位置的に固定されており、最も内側のプレート520aに対して中間プレート520bがx軸の周りを回転することが可能となるように、たわみ部522a及び522bはサイズが合わされ且つ形づくられている(図6A内に示されている)。同様に、中間プレート520bと最も外側のプレート520cとが互いに関連してy軸の周りを回転することが可能となるように、たわみ部524a及び524bはサイズが合わされ且つ形づくられている(図6B内に示されている)。
【0059】
たわみ部522a−522b及び524a−524bに沿った中間プレート520b及び最も外側のプレート520cの傾きを調整することにより、ジンバルプラットフォーム502を、制御可能に配置することができる。プラットフォーム502の走査運動を生じさせるために、たわみ部522a−522bの周りのx軸の周りの第1の位置にプラットフォーム502を傾けることができ、次いで、たわみ部524a−524bの周りのy軸に沿った複数の位置にプラットフォーム502を傾けることができる。プラットフォーム502を、次いで、x軸の周りの第2の位置に傾けることができる。プラットフォーム502は、たわみ部522a−522bについての共振周波数を有することができ、これにより、その共振周波数の付近の駆動周波数において強調された動作が生じることとなる。同様に、プラットフォーム502は、たわみ部524a−524bについての共振周波数を有することができ、これにより、その共振周波数の付近の駆動周波数において強調された動作が生じることとなる。ジンバルプラットフォームアセンブリ500の共振周波数は、約50Hz〜約20kHzとすることができ、第1のたわみ部の対522a−522bについての共振周波数は、第2のたわみ部の対524a−524bの共振周波数にほぼ類似したものとすることができるか、又は第2のたわみ部の対524a−524bの共振周波数とは実質的に異なるものとすることができる。他の可能性のある走査運動は、円形走査を含み、両軸に沿って傾くことを含む。プラットフォーム502の制御可能な動作は、図8に関して更に詳細に説明される。
【0060】
図5の断面図内に示されるように、磁石510もまた、トロイド形状にされており、放射状に内部に延びるショルダー部526を有する内壁528を備える。磁石510がジンバル506の上に実装されていることにより、ショルダー部526は、最も外側のジンバルプレート520cの外側の周辺に隣接することとなり且つ該周辺によって支持されることとなる。図5のその特定の構成において、ショルダー部は、壁528に沿って軸方向に配置されており、その結果、壁528は、支持ベース505に向ってジンバル506を通り越して、軸方向に延在する。
【0061】
プラットフォーム502は、対向したほぼ円形の表面508及び512を有したほぼ円筒形のディスク形状を有する。プラットフォーム表面512は、磁石510の最も上側の表面530上に実装される。プラットフォーム502は、約0.3mm〜約5cmの間の、外側の直径514を有する。プラットフォーム102、202、及び302の場合のように、表面508と512とが、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもできる。該幾何学形状には、任意の適合可能な多角形か又は卵形の形状を有することも含まれる(但し、これらに限定されない)。
【0062】
プラットフォーム102、202、及び302の場合のようにまた、プラットフォーム502の表面508は、反射性であるか、又は反射性である一部を含む。代替的には、表面508には、反射性コーティングか又は他の処置を含めることができる。該表面は、ほぼ平坦になっているように示されているが、該表面は、任意の適合可能な形状とすることができる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及びファセット部分の任意の適合可能な組み合わせを含む(但し、これらに限定されない)。
【0063】
図5の例示的な実施形態によれば、プラットフォーム502を、シリコンか、プラスチックか、ガラスか、又は任意の他の適合可能な反射性材料から構築することができる。支持エレメント504は、非磁性体であり、例えば、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構成される。好適な例示的な実施形態によれば、ジンバル506を、シリコンから構築することができる。しかしながら、任意の他の適合可能な材料を使用することもできる。磁石510を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0064】
代替の構成において、ジンバル506上に実装されたトロイド状の磁石510を用いるのではなく、ジンバル506上に実装された1つか又は複数の磁石をアセンブリ500が含む。一例において、そのような磁石は、プラットフォーム502の下側512上に実装される。代替的には、磁性コーティングを、プラットフォーム502の下側512に適用することができる。トロイド状の磁石510か、磁性コーティングか、或いはプラットフォーム502に実装された1つか又は複数の磁石を使用する例において、プラットフォーム502は、それ自体が強磁性材料から形成される必要がない。
【0065】
プラットフォーム502は、x及びy軸の周りの3次元空間内において制御可能に移動可能である。利点の1つによれば、キャップ523によってジンバル506の内側プレート520aが支持エレメント504にしっかりと結合されるので、ジンバルプラットフォームアセンブリ500を、ユニットとして、3次元空間に対する任意の所望の配向に、回転させ且つ移動させることができる。
【0066】
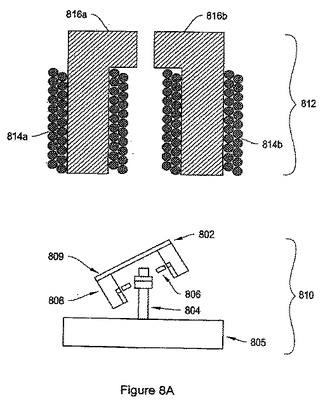
図8Aは、本発明の例示的な一実施形態による、図5〜7B内に図示されたタイプのジンバルアセンブリ810と、磁気プラットフォームアクチュエータ812とを含むシステム800の概念図の断面図である。ジンバルアセンブリ810は、図5のジンバルアセンブリ500に類似しており、プラットフォーム802、支持エレメント804、ジンバル806、及び磁石808を含む。例示的な支持エレメント804は、ジンバル806のほぼ中心に配置されている。
【0067】
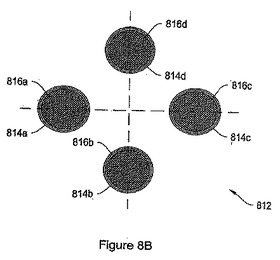
概して、磁気プラットフォームアクチュエータ812は、図8Bの上面斜視図内に示されているように、4つのコイル8141〜814dを含む。しかしながら、図8Aの断面図800内では、アクチュエータ812の2つのコイル814a−814bだけが示されている。他の例示的な実施形態によれば、磁気プラットフォームアクチュエータ812には、任意の所望の数のコイルを含めることができる。コイル814a及び814bは、コイル支持816a及び816b上に実装されている。動作中、コイル814a〜814bは、図4に関して上述された手法とほぼ同じ手法で、制御される手法において駆動される。
【0068】
磁気プラットフォームアクチュエータ812は、ジンバルミラーアセンブリ810のミラー側809の付近に配置されているように示されているが、磁気アクチュエータ812を、プラットフォーム802の支持ベース805側の付近を含む任意の適合可能な位置に配置することもできる。同様に、コイル814a及び814bは、互いに平行に配置されているが、図4に関して上記に説明された配置のように、コイル814a及び814bを、任意の適合可能な配置に位置付けることができる。例示的な実施形態によれば、コイル814a及び814bは、銅から構築される。しかしながら、それらを任意の適合可能な材料から作ることもできる。
【0069】
例示的な一実施形態によれば、コイル支持816a−816bは、非磁性体とすることができる。一構成において、コイル支持816a−816bは、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構築される。代替の例示的な一実施形態によれば、コイル支持816a−816bを、軟質磁性材料から構築することができる。該軟質磁性材料は、パーマロイか、CoFeか、合金1010鋼か、又は任意の他の適合可能な軟質磁性材料などである。
【0070】
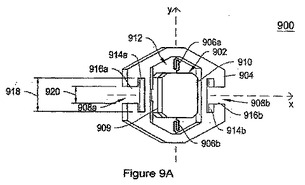
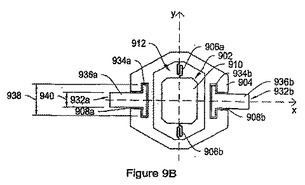
図9A〜9Eは、本発明の他の例示的な実施形態による、小型ジンバルミラーアセンブリを示す。以前に説明した静止した中心支持構成の実施形態とは対照的に、図9A〜図9Eの例示的な実施形態は、静止したか又は回転するフレーム/支持に対して回転可能に実装された移動可能なプラットフォームを有する。より具体的には、図9Aは、本発明の例示的な一実施形態による、移動可能な内部プラットフォームを有するジンバルミラーアセンブリ900を示す。ジンバルミラーアセンブリ900は、プラットフォーム902、フレーム904、及び回転たわみ部906a〜906bを含む。図9B〜9Dは、図9Aのジンバルミラーアセンブリ900の更なる例示的な実施形態を示す。
【0071】
図9A〜9Dを参照すると、フレーム904は、ほぼ八角形であり、大きな八角形のスルー開口部912を有している。プラットフォーム902は、概して長方形であり、フレーム904の開口部912内において配置されている。しかしながら、プラットフォーム902とフレーム904とは、任意の適合可能な形状を有することもできる。例示的な実施形態によれば、内部プラットフォーム902が、第1の回転たわみ部906aと第2の回転たわみ部906bとによってフレーム904に取り付けられている。回転たわみ部906a−906bは、プラットフォーム902のほぼ対向する側面上に実装されている(又は形成されている)。これにより、回転たわみ部906a−906bが、プラットフォーム902の1つの軸(例えば、y軸)に沿ってほぼ位置合わせされる。回転たわみ部906a及び906bは、図7A及び7Bに関してその図面内に示され且つ説明された回転たわみ部524a及び524bにほぼ等しい。1つの特徴によれば、プラットフォーム902は、y軸の周りを回転たわみ部906a及び906bを介して回転するが、外側フレーム904は、静止したままである。しかしながら、図10及び図11に関して更に詳細に下記において説明されるように、フレーム904を、支持構成に対して回転可能に実装することもできる。
【0072】
その例示的な実施形態によれば、外側フレーム904は、第1のレセプタクル908aと第2のレセプタクル908bとを含む。レセプタクル908a及び908bは、フレーム904のほぼ対向する側面内に形成される。これにより、レセプタクル908a及び908bは、x軸に沿ってほぼ位置合わせされることとなる。レセプタクル908a及び908bは、内側部分914a及び914bと、外側部分916a及び916bとを有しており、内側部分914a及び914bは、外側部分916a及び916bの幅920よりも広い幅918を有した状態になっている。
【0073】
図10〜11に関して更に詳細に説明されるように、フレーム904を支持構成に回転可能に実装するために、レセプタクル908a及び908bを用いることができる。1つの特徴によれば、支持構成に実装される時には、外側プラットフォーム904は、x軸の周りを回転することができる。
【0074】
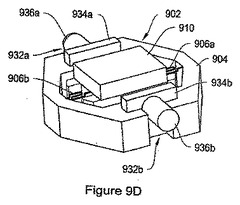
図9A及び9D内において最も明確に示されているように、プラットフォーム902は、表面909に取り付けられた磁石910を含む。磁石910は、ほぼ平坦になっているように示されているが、該磁石910は、任意の適合可能な形状とすることができ、及び任意の適合可能なサイズとすることができる。追加的には、磁石910は、表面909の一部だけを覆うことが可能である。代替的な一実施形態によれば、ジンバルプラットフォームアセンブリ900は、表面909に取り付けられた複数の磁石910を含む。例示的な実施形態によれば、磁石910は磁性体であり、該磁石910を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0075】
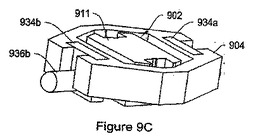
図9C内において最も明確に示されているように、プラットフォーム902はまた、表面909に対向する、プラットフォーム902の表面上に、反射性構成要素911も含む。例示的な一実施形態によれば、反射性構成要素911はミラーであり、該反射性構成要素911を、シリコンか、プラスチックか、ガラスか、又は任意の他の適合可能な材料から構築することができる。代替の例示的な一実施形態によれば、反射性構成要素911は、反射性コーティングとして形成される。追加的には、反射性構成要素911は、ほぼ平坦になっているように示されているが、該反射性構成要素911は、任意の適合可能な形状とすることができる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但し、これらに限定されない)。
【0076】
その例示的な実施形態によれば、プラットフォーム902、フレーム904、及び回転たわみ部906a−906bを備えるジンバルアセンブリ900を、シリコンからの一枚に構築することができる。しかしながら、任意の他の適合可能な材料を用いることもできる。プラットフォーム902とフレーム904とは、非磁性体とすることができ、該プラットフォーム902とフレーム904とを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、プラットフォーム902とフレーム904とは、磁性体とすることができ、該プラットフォーム902とフレーム904とを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。その例示的な実施形態によれば、磁石910を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0077】
図9B〜9D内に示されるように、ジンバルアセンブリ900にはまた、第1のスピンドル932aと第2のスピンドル932bとを含めることができる。スピンドル932a−932bは、フレーム904に結合されるか、又はフレーム904に統合されるように形成されて、レセプタクル908a−908b内へと嵌合するよう形づくられる。その例示的な実施形態によれば、スピンドル932a−932bは、内側部分934a−934bと、外側部分936a−936bとを有する。スピンドル932a−932bの内側部分934a及び934bは、スピンドル934a−934bの外側部分936a及び936bの幅918よりも広い幅940を有する。
【0078】
例示的な一実施形態によれば、第1のスピンドル932aと第2のスピンドル932bが、それぞれ、第1のレセプタクル908a内と第2のレセプタクル908b内において位置的に固定される。しかしながら、代替の例示的な一実施形態によれば、スピンドル932a−932bは、レセプタクル908a−908b内において回転可能に配置される。図9C及び9D内において最も明確に示されるように、外側部分936a及び936bは、ほぼ円筒形であり、図11〜12に関してより詳細に後述されるように、支持構成に対してフレーム904を回転可能に実装するのに適している。
【0079】
スピンドル932a−932bを、フレーム904の残りのものと共に、シリコンからの1枚に構築することができるか、或いは、任意の適合可能なスピンドル材料を用いてフレーム904から分離するように構築することができる。スピンドル932a−932bは、非磁性体とすることができ、及び、スピンドル932a−932bを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、スピンドル932a−932bは、磁性体とすることができ、スピンドル932a−932bを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0080】
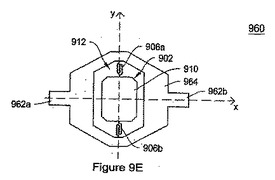
図9Eは、図9A〜9Dのアセンブリ900に類似したジンバルアセンブリ960を示すが、フレーム964内に統合されるように形成されたスピンドル962a及び962bを含んでいる。この例示的な実施形態によれば、第1のスピンドル962a及び第2のスピンドル962bは、フレーム964のほぼ対向する側面上に形成されており、これにより、それらは、x軸に沿ってほぼ位置合わせされることになる。スピンドル962a−962bは、ほぼ円筒形であるが、それらは、任意の適合可能な幾何学形状とすることもできる。スピンドル932a及び932bの場合におけるように、スピンドル962a−962bを、フレーム964を支持構成に回転可能に実装するために使用することができる。
【0081】
その例示的な実施形態によれば、スピンドル962a−962bは、フレーム964と同じ材料から構築され、スピンドル962a−962bを、シリコンから、フレーム964と共に一枚に、形成することができる。しかしながら、任意の他の適合可能な材料を使用することもできる。フレーム964及びスピンドル962a−962bは、非磁性体とすることができ、フレーム964及びスピンドル962a−962bを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、フレーム964及びスピンドル962a−962bは、磁性体とすることができ、フレーム964及びスピンドル962a−962bを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0082】
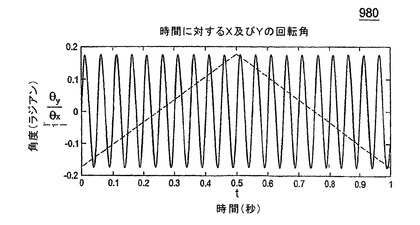
図9Fは、ラスター走査を生じさせるために、ミラーシステムを制御するための方法の例示的な一実施形態による、相対的なプラットフォームとフレームの位置を示すグラフ980である。グラフ980は、ある時間にわたる、例示的なラスター走査傾斜角度を示している。実線は、プラットフォーム902の傾斜角度を示しており、示されているように、正弦波曲線状に変化している。プラットフォーム902の動きの周波数は、プラットフォーム902と磁石910とを支持している回転たわみ部906a及び906bの共振周波数に対応する。点線は、フレーム904の傾斜角度を表しており、この実施例によれば、三角波の傾斜状に変化している。回転たわみ部906a及び906bの周囲において、典型的にはプラットフォーム902の動きよりも実質的に遅い周波数で、フレーム904はスピンドル932a及び932bに沿って前後に傾く。1つの特徴によれば、システム500とは対照的に、回転たわみ部の第2の対の代りにスピンドル932a及び932bを用いることは、グラフ980内に示されている非共振の傾きを、より容易に可能にする。プラットフォーム902とフレーム904との組み合わされた動きは、2軸のラスター走査動作を生じさせる。
【0083】
より具体的には、一構成によれば、図9F内に示されているように、ピーク傾斜角度は、各軸周辺のいずれかの方向におけるプラットフォーム902の機械的回転における10度であり、これにより、各軸に沿って40度の総合的な光学走査が生じる結果となる。図9F内において、例示を目的とするために、速軸の共振は20Hzであり、傾斜期間は1秒である。他の実施例において、機械的回転のピーク角度は、約3度〜約45度の間とすることができ、これにより、各軸に沿って約12度と約180度の総合的な光学走査が生じる結果となる。速軸の共振は、プラットフォームと磁石とを加えた回転たわみ部の共振周波数にほぼ等しいものとすることができ、約100Hz〜約20kHzの間とすることができる。傾斜期間は、約1/40秒〜約10秒の間とすることができる。
【0084】
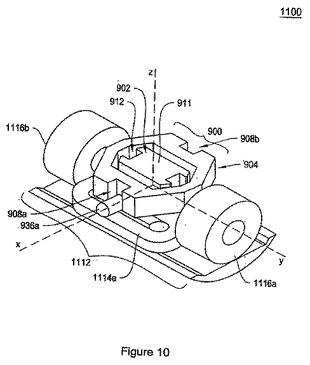
図10は、本発明の例示的な一実施形態による、図9Bのジンバルプラットフォームアセンブリ900と、磁気プラットフォームアクチュエータ1112とを含む小型の作動可能に移動可能なプラットフォームシステム1100を示す。磁気プラットフォームアクチュエータ1112は、y軸の周りにプラットフォーム902を回転させるための第1のy軸磁気コイル1114及び第2のy軸磁気コイル(図示せず)と、x軸の周りにフレーム904を回転させるための第1のx軸磁気コイル1116a及び第2のx軸磁気コイル1116bとを含む。
【0085】
その例示的な実施形態によれば、磁気コイル1114aを含むy軸磁気コイルは、フレーム904のほぼ下に配置され、x軸コイル1116aと1116bとの間のy軸のいずれかの側の長手方向に延在し、x軸コイル1116aと1116bとが、互いにほぼ平行にとなり合う。第2のy軸磁気コイルは、ジンバルプラットフォームアセンブリ900によって覆い隠されている。x軸コイル1116a−1116bは、トロイド形状にされており、x軸及びz軸から等しい距離の、フレーム904のいずれかの側に配置されている。動作中、x軸コイル116a及び116bに電流を提供することにより、フレーム904が、スピンドル936a及び936bを介してx軸の周りに回転させられる。同様に、コイル1114aを含むy軸コイルに電流を提供することにより、プラットフォーム902が、たわみ部906a及び906bを介してy軸の周りに回転させられる。
【0086】
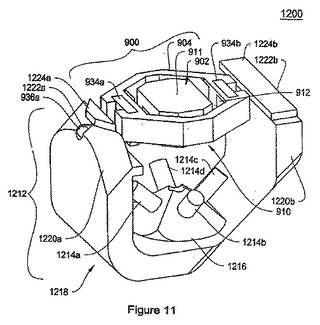
図11は、本発明の別の例示的な実施形態による、磁気アクチュエータ1212内においてジンバルプラットフォームアセンブリ900が回転可能に実装された代替の例示的な一実施形態を示す。磁気アクチュエータ1212は、支持構成1218と、ベース1216と、4つの磁気コイル支持1214a〜1214dとを備える。支持フレーム1218は、第1の支持エレメント1220aと第2の支持エレメント1220bとを含む。支持エレメント1220a−1220bの各々は、プラットフォームアセンブリ900のスピンドル936a−936bを受容するためのレセプタクル1222aと1222bをそれぞれ含む。レセプタクル1222a及び1222bは、切り込み(ノッチ)として図示されている。しかしながら、それらは、回転可能にスピンドル936a−936bに嵌合させるための溝か、チャンネルか、トンネルか、又は任意の他の適合可能な形状とすることもできる。1つの例示的な特徴によれば、スピンドル936a及び936bをレセプタクル1222a及び1222b内に確保するために、カバー1224aと1224bを、レセプタクル1222a上と1222b上にそれぞれ実装することができる。
【0087】
磁気プラットフォームアクチュエータ1212は、4つのコイル支持1214a〜1214dと共に示されているが、任意の所望の数のコイル支持を用いることもできる。動作中には、図4内に示されたようなコイルが、コイル支持1214a〜1214dの周りに巻かれている。そのコイルを、図4に関連して上記に説明したような類似のやり方で、プラットフォーム902を動かすための、制御される手法において、駆動することができる。より具体的には、コイル1214b及び1214dに対して駆動電流を供給することにより、フレーム904が、スピンドル936a及び936bの周りに回転させられることになる一方で、コイル1214a及び1214cに対して駆動電流を供給することにより、プラットフォームが、たわみ部906a及び906bの周りに回転させられることになる。利用可能なコイルに対して提供される駆動電流のパターンを変化させることにより、3次元空間に対するプラットフォーム902の所望の動きを達成することができる。上記に説明された用途におけるように、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、図10及び図11の構成を用いることができる。
【0088】
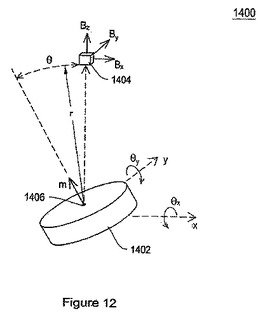
図12は、本発明の例示的な一実施形態による、プラットフォーム位置検知のための構成の概念図1400である。概念図1400は、プラットフォーム1402の位置を検知するための磁気センサ1404を含む。プラットフォーム1402は、磁性体であるか、又は該プラットフォーム1402に実装された1つか又は複数の磁石を含んでいるかのいずれかである。その例示的な実施形態によれば、磁気センサ1404は、プラットフォーム1402の磁界に基づき、該プラットフォーム1402の傾斜の角度を測定することが可能なホール効果センサである。プラットフォーム1402が、2つの軸の周りに傾くと、ホール効果センサ1404が、プラットフォーム1402の軸の傾きを測定する。
【0089】
その例示的な実施形態によれば、概念図1400は、プラットフォーム1402についての、θx及びθyの2つの角度を示す。磁気センサ1404は、少なくとも2軸の磁気センサであり、少なくともBx及びByの電圧出力を有する。しかしながら、Bx、By、及びBzの電圧出力を有する3軸磁気センサ1404を用いることもできる。その例示的な実施形態によれば、Bz出力を用いて、Bx及びBy出力を正規化することができる。磁気センサ1404は、プラットフォーム1402の傾きθx及びθyの両角度を測定し、各角度θx及びθyのサイン(正弦)に比例した電圧出力を有する。1つの特徴によれば、このことが、スムーズでほぼ線形な出力を生じる結果となり、図13に関して更に詳細に説明されるように、これを、プラットフォーム1402の角度θx及びθyを制御するために用いることができる。
【0090】
例示的な一実施形態によれば、プラットフォーム1402の磁気特性によって生じさせられた磁界が、図1400内に示されるように、半径r方向とθ方向とに沿ったその構成要素によって提供される。式1〜4(下記)内において、rは、プラットフォーム1402の磁気ダイポールの中心1406から、磁気センサ1404への距離であり、θは、プラットフォーム1402のz軸と、磁気センサ1404の位置との間の傾きの角度である。
【0091】
【数1】
ここで、θは、プラットフォーム1402の傾きの角度であり、rは、プラットフォーム1402の磁気ダイポールの中心から磁気センサ1404までの距離であり、μ0は、自由空間の透磁率(透過率)であり、mは、プラットフォーム1402内に含まれる磁気ダイポール磁石である。
【0092】
別の例示的な実施形態によれば、式3〜4内に示されるような正規化定数BX0又はBY0を使用せずに、3軸磁気センサ1404が用られて回転角が測定される。
【0093】
【数2】
ここで、θx及びθyは、それぞれx軸及びy軸におけるプラットフォーム1402の傾きであり、Bx、By、及びBzは、それぞれx軸、y軸、及びz軸に沿ったセンサ1404における磁界成分であり、BX0又はBY0は、正規化定数であり、90度の回転における磁界を表す。
【0094】
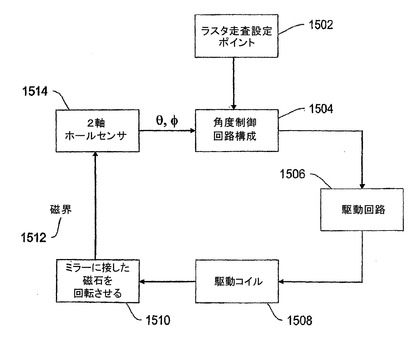
図13は、プラットフォーム位置を制御するための、且つ、図13内に示されたタイプのプラットフォーム検知構成を用いるための制御システムによって使用される処理を説明する流れ図1500である。その方法は、設定ポイント、すなわちラスター走査のためのターゲットポイントにより開始する(ステップ1502)。該設定ポイントは、プラットフォームの角度を制御する角度制御回路構成に送られる(ステップ1504)。該角度制御回路構成は、プラットフォームの所望の傾きに関する情報を、駆動回路に送る(ステップ1506)。該駆動回路は、この情報を駆動コイル上に送り(ステップ1508)、磁界を調整する。これにより、プラットフォームが回転させられる(ステップ1510)。磁気センサが、プラットフォームにより結果として生成される磁界を検知し、実際のプラットフォームの傾きを決定する(ステップ1514)。この情報は、前記角度制御回路構成に戻すように送られ、該角度制御回路構成は、次いで、必要に応じてプラットフォームの傾きを再調整することができる。
【図面の簡単な説明】
【0095】
【図1】本発明の例示的な一実施形態による、半球形のプラットフォームキャビティを有した磁気的に支援されたピボットインターフェースを有する支持構成の断面図である。
【図2】本発明の代替の例示的な一実施形態による、図1の実施形態に類似した支持構成であるが、円錐形のプラットフォームキャビティを有する支持構成の断面図である。
【図3】本発明の別の例示的な実施形態による、図1の実施形態に類似した支持構成であるが、v型形状のプラットフォームキャビティを有する支持構成の断面図である。
【図4】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータと共に図2の支持構成を含むシステムの図である。
【図5】本発明の別の例示的な実施形態による、プラットフォームにおける複数軸の配置のためのジンバルアセンブリの断面図であり、該ジンバルアセンブリは、静止した中心支持構成を有している。
【図6A】y軸の周りを例示的に回転させられる図5のアセンブリと共に使用されるための例示的なジンバルプラットフォームアセンブリの上面斜視図である。
【図6B】x軸の周りを例示的に回転させられる図6Aのジンバルプラットフォームアセンブリの上面斜視図である。
【図7A】本発明の例示的な一実施形態による、統合されるように形成された回転たわみ部を用いている、図5〜6B内において図示されたタイプのジンバルプラットフォームアセンブリの上面図である。
【図7B】図7Aの回転たわみ部に類似した、部分的に組み立てられた折り重ねられた回転たわみ部の拡大図である。
【図8A】本発明の例示的な一実施形態による、図5〜7に図示されたタイプのジンバルプラットフォームアセンブリと、磁気プラットフォームアクチュエータとを含むシステムの断面概念図である。
【図8B】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータの断面概念図である。
【図9A】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9B】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9C】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9D】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9E】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9F】本発明の例示的な一実施形態による、ある時間にわたる共振速軸と非共振遅軸の傾きについての例示的なラスター走査角度を示すグラフである。
【図10】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータと共に図9Bのジンバルプラットフォームアセンブリを含む支持システムを示す図である。
【図11】本発明の代替の例示的な一実施形態による、図10内に示されたタイプの支持システムであるが、磁気プラットフォームアクチュエータを用いている支持システムを示す図である。
【図12】本発明の例示的な一実施形態による、プラットフォーム位置検知のための構成の概念図である。
【図13】プラットフォーム位置を制御するための、且つ、図12内に示されたタイプのプラットフォーム検知構成を用いるための、制御システムを示すブロック図である。
【技術分野】
【0001】
関連特許出願の相互参照
本出願は、2005年12月16日にファイリングされた米国実用新案出願第11/305,053号に対する優先権と、該出願の利益とを請求し、その開示全体が、参照により本明細書内に組み込まれる。
【0002】
発明の分野
本発明は、一般には、制御可能に作動させることが可能な小型プラットフォームに関し、特に、様々な実施形態において、小型ミラーを含む制御可能に作動させられる小型プラットフォームアセンブリに関するシステム、方法、及び装置に関する。
【背景技術】
【0003】
バーコードリーダ、カメラ、プロジェクションテレビ、内視鏡、及び腹腔鏡のような走査光学ビーム技術は、光学ビームを導くために、微小電気機械(MEMS)ミラーのような小型の電気的・機械的ミラーを頻繁に用いる。MEMSミラーは、典型的には、高電圧の静電式のか、電熱式のか、圧電式のか、又は電磁式の操作を利用する。それら操作は全て、典型的には、該ミラーに取り付けられた電気的なワイヤを必要とする。これらワイヤは、光学ビームを遮断する可能性があり、ある特定の光学的設計を妨げる。更に、高電圧は、安全ではないと考えられ、医療装置のようなある特定用途の場合には信頼することが出来ない。
【発明の開示】
【発明が解決しようとする課題】
【0004】
医療用の従来の代替的な走査装置は、光ファイバを用いて、光を持ち込み、そのリターン信号を収集する。これらの装置は、典型的には、該装置内において光ファイバを回転させて、走査した画像を取得する。回転軸についての円形走査を形成するための1つの現在のアプローチは、光ファイバを回転させるために外部モータによって駆動させられた回転する機械式のリンク機構を用いる。このアプローチは、幾つかの欠点を被る。1つの欠点は、その回転する機械式リンク機構が、典型的には、光学ロータリーコネクタとして知られるような高価な構成要素を必要とすることである。別の欠点は、狭い口径(<2mm)の走査機器の場合に、該機器の機械式の連結(トレイン)の剛性が、光ファイバの均一な回転を保証するには不十分であることである。光ファイバの不均一な回転は、不均一回転歪(Non-Uniform Rotation Distortion:NURD)として知られる画像の歪みをまねく結果となる。更なる欠点は、このアプローチが、単軸走査を生じさせることである。
【0005】
従って、小型の光学走査装置を提供するための改善されたアプローチが、必要とされている。
【課題を解決するための手段】
【0006】
本発明の要約
本発明は、様々な実施形態において、複数軸に沿って制御可能に作動させられる小型プラットフォームに関する改善されたシステム、方法、及び装置を提供することによって、先行技術の欠陥(不備)に対処する。幾つかの実施形態によれば、小型ミラーを、そのようなプラットフォーム上に実装することができるか、そのようなプラットフォーム上に形成することができるか、そのようなプラットフォームに統合されるように形成することができるか、又はそのようなプットフォームから形成することができる。幾つかの構成によれば、本発明のプラットフォームを、回転するように作動可能にすることもできる。1つの利点によれば、本発明の小型の作動可能なプラットフォームは、磁性駆動を用い、(典型的には、約2ボルト未満の)低電圧を使用し、該プラットフォームに取り付けられる電気的ワイヤを必要としない。別の利点によれば、光ファイバの機械的な回転はもはや必要とせず、該光ファイバが静止したままとすることができる一方で、反射性の表面を有するプラットフォームが動かされる。
【0007】
一態様によれば、本発明は、小型の操作可能に可動な支持構造を提供し、該支持構造は、プラットフォーム、支持エレメント、及び磁気ベアリングを含む。概して、磁気ベアリングは、プラットフォームと支持エレメントとの間に配置されて、支持エレメントとプラットフォームとの間において磁気的に高められたピボットインターフェースを提供する。幾つかの構成において、プラットフォームは、対向したほぼ円形の第1及び第2の表面を有する円筒形ディスクとして形づくられる。代替的には、プラットフォームと該第1及び第2の表面とは、任意の適合可能な形状を有することができる。一構成によれば、プラットフォームは、約0.3mm〜約5cmの間の外側直径と、約0.02mm〜約5mmの間の高さ/厚みとを有する。様々な他の構成において、可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる構成によれば、可動プラットフォームは、約5mmか、2.5mmか、1mmか、0.5mmか、0.25mmか、0.1mmか、50μmか、25μmか、10μmか、又は5μm、未満の厚み/高さを有する。
【0008】
プラットフォームには、該プラットフォームの第1の表面内に(例えば表面下に)形成されたキャビティを含めることができる。該キャビティは、内面を含む。該内面は、磁気ベアリングに接触する。該キャビティは、任意の適合可能な幾何学形状とすることができ、該幾何学形状は、半球形か、長方形か、円錐形か、又はv型形状を含む(但しこれらに限定されない)。追加的には、該キャビティを、中心に配置することができるか、又はプラットフォームの直径/幅の一部か又は全体に沿って延在させることができる。代替的には、プラットフォームを、いかなるキャビティも無く、設計することもできる。
【0009】
1つの特徴によれば、キャビティの内面は、ほぼ平滑である。別の特徴によれば、キャビティの内面は、強磁性材料から形成されるか、又は磁気ベアリングの極性とは反対の極性で磁化され、その結果、該磁気ベアリングと、該キャビティの内面とが、互いに引き寄せ合うこととなる。一構成によれば、プラットフォームの全体か又はほぼ全体が、硬質磁性材料か又は強磁性材料から形成される。しかしながら、別の構成によれば、プラットフォームは、非磁性の引き寄せ材料から形成され、該プラットフォームに取り付けられたか又は該プラットフォーム内へと形成された1つか又は複数の磁石を有する。
【0010】
1つの特徴によれば、プラットフォームとベアリングとの間における磁気的な引き寄せは、支持エレメントに対するプラットフォームの回転軸上に置かれる及び/又は回転させられる配向とは無関係に、キャビティの表面と磁気ベアリングとの間の接触を保つ。この特徴の結果として、プラットフォームと磁気ベアリングとの間の接触を失うこと無く、プラットフォームと、磁気ベアリングと、支持エレメントとの組み合わされた構成を、3次元空間に対する任意の所望の配向へと、回転させ且つ動かすことができる。更なる特徴によれば、プラットフォームと磁気ベアリングとの間の磁気的な相互作用は、支持エレメントのベアリング上のプラットフォームをセンタリングさせるように作用するバネ復元力を形成する。
【0011】
別の特徴によれば、プラットフォームの第2の表面(例えば上面)は、反射性であるか、又は反射性である一部分を含む。代替的には、第2の表面は、反射性コーティングを含むことができるか、或いは反射性構成要素を第2の表面に実装することができる。一構成において、第2の表面が、ほぼ平坦である。しかしながら、別の構成では、第2の表面は、任意の適合可能な形状とすることができ、該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但しこれらに限定されない)。
【0012】
一実施形態によれば、支持エレメントは、非磁性体であり、円錐形に形づくられており、約0.1mm〜約100mmの間の高さを有する。しかしながら、代替の実施形態において、支持エレメントは、任意の適合可能な形状を有することができる。1つの特徴によれば、磁気ベアリングを受容するために、凹形のゆりかごのようなレセプタクルを、一端部において支持エレメントが含む。磁気ベアリングは、該レセプタクル内において回転可能とすることができるか、又は該レセプタクル内において位置的に固定されることが可能である。他の構成によれば、磁気ベアリングは、任意の適合可能な幾何学形状とすることができ、該幾何学形状は、球形か、半球形か、又は円錐形状を含む(但しこれらに限定されない)。磁気ベアリングはまた、比較的軟質か又は硬質とすることができるか、或いは、比較的軟質か又は硬質な外殻を含むことができる。追加的には、支持エレメントの端部には、レセプタクルが無いものを含めることができ、その代りに、磁性材料を含めることができ、プラットフォームの第1の表面を引き寄せて接触するよう適合可能に形づくられる。例示を目的として、前記端部を、尖っていない先端か又は鋭い先端を有する円錐形に形づくることができる。
【0013】
動作中、磁気ベアリングか、又は支持エレメントの先端は、ピボットとして作用し、該ピボットの周囲において、プラットフォームは、任意の方向に傾くことが自由である。幾つかの実施形態において、例えば支持エレメントの長手方向の軸の周りを、プラットフォームはまた回転することもできる。1つの特徴によれば、プラットフォームの付近の支持エレメントの幅と共に、該プラットフォーム内のキャビティの寸法及び形状が、該プラットフォームと該支持エレメントとの間における利用可能な偏向の最大角を決定する。
【0014】
更なる一態様において、本発明は、磁気プラットフォームアクチュエータを含む。一実施形態において、磁気プラットフォームアクチュエータは、4つのコイルとベースとを備える。しかしながら、磁気プラットフォームアクチュエータには、任意の所望の数のコイルを含むめることもできる。一実施例によれば、該コイルは、プラットフォームを傾けるための制御された手法において駆動される。より具体的には、ある特定のコイルに電流を提供することが、磁界を形成させ、その磁界が、プラットフォームを引き寄せることにより、該プラットフォームが、該特定のコイルに向かうようにか又は離れるように傾斜させられる。より一般的には、個々のコイルか又はコイルの組み合わせに対して電流を提供することにより、プラットフォームが、所望の方向に傾斜させられる。例えば、コイルを、対(ペア)で動作させて、プッシュ・プル(押し・引き)のトルクを提供することができる。一実施形態によれば、プラットフォームは、反射性の表面を有し、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、コイルに対する電流駆動を調整することにより、該反射性の表面を、制御可能に位置付けることができる。
【0015】
更なる一実施形態によれば、前記電流駆動が、連続的にコイルを掃引することができ、それにより、プラットフォームが、各連続的なコイルに向って連続的に傾斜させられて、円形の走査運動が形成される。追加的には、コイルの連続的な掃引ごとに、電流の強度を変化させることによって、任意の所望サイズの連続的なラスター走査を達成させることができる。走査中に電流の強度を変化させることによってもまた、任意の所望の形の走査を達成することができる。
【0016】
一構成によれば、磁気プラットフォームアクチュエータは、プラットフォームのミラー側の付近に配置される。しかしながら、代替の一構成によれば、該磁気アクチュエータを、任意の適合可能な位置に配置することもできる。一構成によれば、コイルは、互いに平行に配置され、磁気プラットフォームアクチュエータのベースの周囲に沿って均等に隔置される。しかしながら、代替の構成において、該コイルを、ベース上のか又はベースに対する、任意の適合可能な配置に、位置付けることもできる。追加的には、用途に依存して、任意の所望パターンにおいてか、或いはランダムか又はほぼランダムなパターンにおいてコイルを掃引することができる。
【0017】
別の態様によれば、本発明は、プラットフォーム、支持構成、ジンバル(回転台)、及び磁石を含む、小型のジンバルプラットフォームアセンブリを提供する。この態様によれば、単一ジンバルプレートを有するのでは無く、このアセンブリのジンバルは、第1、第2、及び第3のプレートを含み、同心のトロイドとして構成され、該第1のプレートが、最も内側のトロイドになっており、該第2のプレートが、次のトロイドになっており、最も外側の第3のプレートにより続けられる。
【0018】
1つの特徴によれば、小型のジンバルプラットフォームアセンブリは、2対の回転たわみ部を含む。たわみ部の第1の対は、第1の軸(例えば、x軸)に概して沿って延在し、ジンバルの最も内側のプレートを、ジンバルの中間プレートに対して、回転可能に相互接続する。同様に、回転たわみ部の第2の対は、第1の軸に垂直な第2の軸(例えば、y軸)に概して沿って延在し、ジンバルの中間プレートを、ジンバルの最も外側のプレートに対して、回転可能に相互接続する。たわみ部の第1の対は、最も内側のプレートに対して、中間プレートが、x軸の周りを回転することが可能となるように寸法が合わされて形づくられる。たわみ部の第2の対は、中間プレートと最も外側のプレートとが、互いに関連してy軸の周りを回転することが可能となるように寸法が合わされて形づくられる。
【0019】
1つの特徴によれば、回転たわみ部は、約1μm〜10μmの間の幅と、約10μm〜約100μmの厚み/深さとを有して、そのような相対運動を可能にする。一構成において、たわみ部の幅は、約6μmであり、たわみ部の厚み/深さは、約50μmである。別の特徴によれば、回転たわみ部は、約250Hz〜約750Hzの共振周波数を有する。一実施例において、回転たわみ部は、約500Hzの共振周波数を有する。更なる特徴によれば、プレートは、約100μm〜約750μmの間の厚みを有する。別の構成において、プレートは、約400μmの厚みを有する。一構成において、たわみ部の両セットに沿った内側、中間、及び外側のプレートは、シリコンからの一枚に形成される。一構成によれば、ジンバルの最も外側のプレートは、約500μm〜約2mmの間の、外側の直径を有する。
【0020】
一実施形態によれば、本発明のこの態様の支持構成は、ベース、遷移部、及び支柱を備える。該遷移部は、ベース内の中心位置の外に軸方向に延在し、該遷移部がベースから離れるように延びるにつれてより小さく先細りにされる直径を有する。該支柱は、遷移部の外に軸方向に延在し、遷移部が、該支柱のための高められた構造上の支持を提供する。該支柱は、第1及び第2のセクションを含む。該支柱の第2のセクションは、第1のセクションに対して削減された直径を有し、第1のセクションと第2のセクションとの間の遷移において放射状に延在するショルダー部が形成されている。
【0021】
更なる一実施形態によれば、最も内側のジンバルプレートは、中心に位置付けられたスルー開口部を有し、支柱における削減された直径セクション上に、滑らすことが可能な状態で嵌合し、これにより、プレートが、該支柱のショルダー部上に隣接させられ且つ設置させられる。支柱における削減された直径セクション上に、キャップが嵌合して、ジンバルを支柱上にロックさせる。幾つかの実施形態によれば、ジンバルは、支柱における削減された直径セクションの周囲を回転可能である。他の実施形態において、ジンバルは、削減された直径セクションに対して、回転するように固定される。
【0022】
一実施形態によれば、本発明のこの態様の磁石はまた、トロイド形状にされており、放射状に内部に延びるショルダー部を有する内壁を含む。該磁石がジンバル上に実装され、これにより、ショルダー部が、最も外側のジンバルプレートの外側の周辺に隣接することとなり且つ該周辺によって支持されることとなる。一構成によれば、壁は、最も外側のジンバルプレートを支持ベースに向って通り越して、軸方向に延在する。
【0023】
更なる実施形態によれば、小型ジンバルプラットフォームアセンブリのプラットフォームは、対向したほぼ円形の第1の表面(例えば上面)及び第2の表面(例えば底面)を有したほぼ円筒形のディスク形状を有する。一構成によれば、プラットフォームの第2の表面は、トロイド状の磁石の頂上に実装される。プラットフォームは、約0.3mm〜約5cmの間の、外側の直径を有し、約0.3mm〜約5cmの間の高さを有する。様々な他の構成において、可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる構成によれば、プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の高さを有する。1つの特徴によれば、プラットフォームの表面は、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもでき、任意の適合可能な多角形か又は卵形の形状を有することを含む(但しこれらに限定されない)。
【0024】
別の特徴によれば、プラットフォームの第1の表面(例えば上面)は、反射性であるか、又は反射性である一部分を含む。代替的には、表面は反射性コーティングを含むことができるか、或いは、他の処置を含むことができる。追加的には、表面は、ほぼ平坦とすることができるか、又は任意の適合可能な形状とすることもできる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及びファセット部分の任意の適合可能な組み合わせを含む(但し、これらに限定されない)。代替的な構成において、ジンバル上に実装された磁石を用いるのでは無く、例えばプラットフォームの底面上において、ジンバル上に実装された磁石をアセンブリが含む。代替的には、磁性コーティングを、プラットフォームの底側に適用することができるか、或いは、この表面を、磁気的にチャージされた材料から形成することができる。
【0025】
1つの特徴によれば、小型ジンバルアセンブリのプラットフォームは、x及びy軸の周りの3次元空間内において制御可能に動かすことができる。追加的には、該プラットフォームは、z軸の周りに回転させることができる。上述の磁気プラットフォームアクチュエータに類似するように、磁気プラットフォームアクチュエータを用いることによって、ジンバルプラットフォームアセンブリを作動させることができる。
【0026】
別の態様によれば、本発明は、中心に配置された支柱に対してでは無く、静止した外側フレームに対して移動可能なプラットフォームを有する小型の作動可能に移動可能なジンバルプラットフォームアセンブリを提供する。この態様によれば、ジンバルプラットフォームアセンブリは、プラットフォーム、外側フレーム、少なくとも1対の回転たわみ部、及び支持構成を備える。
【0027】
一構成によれば、プラットフォームが、フレーム内において、一対の回転たわみ部によってつるされる。一実施形態によれば、回転たわみ部は、プラットフォーム及びフレームの対向する側面上において、直径に沿って位置合わせされる。一実施形態において、プラットフォームは、回転たわみ部の周辺を回転するが、フレームは、静止したままである。しかしながら、他の実施形態において、フレームを、更なる支持構成に回転可能に結合することもまたできる。一構成において、フレームは、該フレームに対するプラットフォームの回転軸とは垂直な軸に沿って支持構成に対して回転する。
【0028】
一実施形態によれば、前記アセンブリは、フレームに取り付けられたか又はフレームに統合されるように形成された2つのスピンドルを含む。一構成において、スピンドルが、支持構成上のレセプタクルに嵌合することにより、該支持構成に対してフレームが回転することが可能になる。代替的な一構成によれば、スピンドルは、支持構成上に配置され、レセプタクルは、フレーム上に配置される。別の実施形態によれば、フレームと支持構成とを回転可能に結合させるために、スピンドル及びレセプタクルでは無く、たわみ部の第2の対を使用することができる。
【0029】
更なる実施形態によれば、前記アセンブリは、プラットフォームに取り付けられた磁石を含む。該磁石は、ほぼ平坦とすることができるか、又は任意の適合可能な形状とすることができる。追加的には、磁石は、プラットフォームの表面の一部分のみを覆うことができるか、又はプラットフォームの表面全体を覆うことができる。代替の一実施形態によれば、アセンブリには、プラットフォームの表面に取り付けられた複数の磁石を含めることができる。更なる実施形態によれば、プラットフォームにはまた、反射性構成要素を含めることもできる。
【0030】
更なる一態様によれば、本発明は、任意の上述のプラットフォームの傾きに関するフィードバックを提供するために、プラットフォームの位置検知システムを提供する。プラットフォーム位置検知システムは、磁気センサを備える。一実施例によれば、該磁気センサは、磁界に基づいて、プラットフォームの2軸の傾きを測定することが可能なホール効果センサである。プラットフォームが、x軸及びy軸の周りを回転すると、ホール効果センサが、プラットフォームの軸の傾きを測定する。一実施形態によれば、磁気センサは、2軸磁気センサである一方で、代替の一実施形態によれば、磁気センサは、3軸磁気センサである。
【0031】
一実施例によれば、位置検知システムは、ラスター走査のためのターゲットポイントを、プラットフォームについての対応する傾斜角度に変換する。傾斜角度制御回路構成が、対応するコマンドを駆動回路に対して提供し、該駆動回路が、対応する駆動電流をプラットフォーム位置決めコイルに対して更に提供する。駆動電流を変更することが、該位置決めコイルの磁界を調整し、所望のプラットフォームの傾きが提供される。ホール効果センサは、傾けられたプラットフォームにより結果として形成された磁界を検知して、実際のプラットフォームの傾きを決定する。この情報は、傾斜角度制御回路構成にフィードバックされ、該傾斜角度制御回路構成が、次いで、駆動回路に対するコマンドを再調整する。
【0032】
本発明の更なる態様、実施形態、構成、及び特徴が、様々な例示的な実施形態と、添付図面に対する参照とに関して後述される。
【実施例】
【0033】
例示的な実施形態の説明
本発明の全体的な理解を提供するために、改善された制御可能に作動させることが可能な小型プラットフォームを提供するためのシステム、方法、及びデイバスを含むある例示的な実施形態が、次に説明される。
【0034】
本発明の例示的な一実施形態による、小型の支持構成100の断面図を図1は示す。図4に関して更に詳細に後述されるように、小型の制御可能に作動させられるミラーシステムを含む様々な用途において、該小型の支持構成100を用いることができる。ミラー支持構成100は、プラットフォーム102、支持エレメント104、及び球形の磁気ベアリング106を含む。概して、その例示的な実施形態によれば、支持エレメント104とプラットフォーム102との間において磁気的に高められたピボットを提供するために、磁気ベアリング106が、プラットフォーム102と支持エレメント104との間に配置される。
【0035】
その例示的な実施形態によれば、プラットフォーム102は、対向したほぼ円形の表面108及び110を有したほぼ円筒形のディスク形状を有する。プラットフォーム102は、約0.3mm〜約5cmの間の外側直径112と、約0.01mm〜約1cmの間の高さ/厚み122とを有する。様々な他の構成において、その可動プラットフォームは、約5cmか、約2.5cmか、1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、又は0.1mm、未満の直径/幅を有する。更なる例示的な構成によれば、プラットフォームは、約1cmか、500mmか、250mmか、100mmか、50mmか、10mmか、1mmか、0.5mmか、0.3mmか、0.1mmか、0.05mmか、0.025mmか、又は0.01mm、未満の高さ/厚みを有する。
【0036】
プラットフォーム102は、表面110内へと形成された半球形のキャビティ114を含む。キャビティ114は、内面116を含む。該内面116は、磁気ベアリング106に、移動可能な状態で接触する。表面108及び110は、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもできる。該幾何学形状は、任意の適合可能な多角形か又は卵形の形状を含む(但しこれらに限定されない)。更に、キャビティ114は、ほぼ半球形になっているように図示されているが、該キャビティ114もまた、任意の適合可能な幾何学形状を有することができる。該幾何学形状は、長方形か、円錐形か、又はv型形状を含む(但しこれらに限定されない)。追加的には、キャビティ114を、中心に配置することができるか、又はプラットフォーム102の直径/幅の一部か又は全体に沿って延在させることができる。代替的には、プラットフォーム102を、いかなるキャビティ114も無く、設計することができる。
【0037】
キャビティ114の内面116は、ほぼ平滑であり、その例示的な実施形態によれば、強磁性材料から形成されるか、又は幾つかのケースでは、磁気ベアリング106の極性とは反対の極性で磁化されて、その結果、該ベアリング106と、該内面116とが、互いに引き寄せ合う。図4に関して更に詳細に後述されるように、プラットフォーム102の表面108は、反射性とすることができるか、又は反射性である一部分を含むことができる。代替的には、表面108は反射性コーティングを含むことができるか、或いは、反射性構成要素が表面108に実装されることが可能である。表面108は、ほぼ平坦になっているように示されているが、該表面108は、任意の適合可能な形状とすることもできる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但し、これらに限定されない)。
【0038】
例示的な実施形態によれば、支持エレメント104は、非磁性体であり、円錐形に形づくられており、約0.2mm〜約1cmの間の高さ118を有する。しかしながら、代替の例示的な実施形態において、支持エレメント104は、任意の適合可能な形状を有することもできる。支持エレメント104の1つの特徴は、磁気ベアリング106を受容するための、凹形のゆりかごのようなレセプタクル120を、端部121において該支持エレメント104が含むことである。幾つかの例示的な実施形態によれば、磁気ベアリング106は、該レセプタクル120内において回転可能である。他の例示的な実施形態において、磁気ベアリング106は、該レセプタクル内において位置的に固定される。磁気ベアリング106は、ほぼ球形になっているように図示されているが、該磁気ベアリング106は、任意の適合可能な幾何学形状とすることもできる。該幾何学形状は、半球形か、円錐形か、円筒形か、又はナイフエッジ形状を含む(但し、これらに限定されない)。磁気ベアリング106は、パーマロイか、CoFeか、又は合金1010鋼のような軟質磁性材料を含むことができるか、或いは、磁気ベアリング106は、SmCoか、NdFeBか、AlNiCoか、又はフェライトのような硬質磁性材料を含むことができる。他の例示的な実施形態において、端部121には、レセプタクルが無い状態を含めることができ、その代りに、磁気的にチャージされ且つ適合可能に形づくられて、表面116を引き寄せて移動可能に該表面116に接触することが可能である。例示を目的として、端部121を、比較的尖っていない先端か又は鋭い先端を有する円錐形に形づくることができる。
【0039】
プラットフォーム102は、磁気ベアリング106及びその支持エレメント104の頂上に置かれるように図示されている。磁気ベアリング106は、ピボットとして作用し、該ピボットの周囲において、プラットフォーム102は、任意の方向に自由に傾くことができる。更なる例示的な実施形態によれば、支持エレメント104の長手方向の軸(すなわち、y軸)の周りを、プラットフォーム102はまた回転することもできる。
【0040】
上述のように、キャビティ114の内面116は、磁気的に極性化されることが可能である。幾つかの例示的な実施形態において、プラットフォーム102の全体か又はほぼ全体を、磁化された材料から形成することができる。しかしながら、他の例示的な実施形態において、プラットフォーム102は、磁性体でないことが可能であるか、或いは、該プラットフォーム102に取り付けられたか又は該プラットフォーム102内へと形成された1つか又は複数の磁石を有する非磁性の引き寄せ材料から形成されることが可能である。
【0041】
例示的な一実施形態によれば、プラットフォーム102と磁気ベアリング106とが、両方とも磁石として構成されて、例えば、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な硬質磁性材料から形成される。支持エレメント104は、非磁性体であり、該支持エレメント104を、例えば、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構成することができる。
【0042】
動作中(図4に関して更に詳細に説明されるように)、磁気ベアリング106がキャビティ114の内面116に接触する位置の周りの3次元空間内において、プラットフォーム102は、制御可能に回転軸上に置かれることが可能である。磁気ベアリング106は、磁気的にプラットフォーム102を引き寄せて、支持エレメント104に対するプラットフォーム102の回転軸上に置かれる及び/又は回転させられる配向とは無関係に、半球形の表面116と、磁気ベアリング106との間の接触を維持する。1つの例示的な実施形態によれば、プラットフォーム102とベアリング106とは、両方とも永久磁石を含み、プラットフォーム102とベアリング106との間の磁気的な相互作用が、支持エレメント104のベアリング106上のプラットフォーム102をセンタリングさせるように作用する磁気的なバネ復元力を形成する。
【0043】
1つの特徴によれば、キャビティ114は、周辺エッジ124を有し、支持エレメント104は、外側表面126を有する。プラットフォーム102がy軸(すなわち、支持エレメント104の長手方向の軸)に垂直である時には、キャビティ114の周辺エッジ124と、支持エレメント104の外側表面126との間の距離が、プラットフォームの傾きの最大角、すなわちθmaxを画定する。θmaxを、様々なキャビティ114及び/又は支持エレメント104の形状寸法(ジオメトリ)を用いることによって調整することができる。θmaxを増大させるために、例えば、支持構成104の幅を狭めることができ、及び/又は、キャビティ114の幅/直径を拡大させることができる。
【0044】
1つの特徴によれば、構成100全体の配向とは無関係に、ベアリング106とプラットフォーム102との間の磁気的な引き寄せが、磁気ベアリング106とプラットフォーム102との間の接触を維持させるので、プラットフォーム102と、磁気ベアリング106と、支持エレメント104とが組み合わされた構成100を、3次元空間に対して、任意の所望な配向に、回転させて動かすことができる。
【0045】
図2は、本発明の別の例示的な一実施形態による、図1の支持構成100に類似した小型の支持構成200の断面図であるが、該支持構成200は、円錐形のプラットフォームキャビティ214を有している。該小型の支持構成200を、図4に関して更に詳細に後述されるように小型の制御可能に作動させられるミラーシステムを含む様々な用途において用いることができる。該小型の支持構成200は、プラットフォーム202、支持エレメント204、及び球形の磁気ベアリング206を含む。その例示的な実施形態によれば、プラットフォーム202は、対向した表面208と210とを有したほぼ円筒形のディスク形状を有する。表面208は、ほぼ円形であるが、表面210は、ほぼ環状である。プラットフォーム202は、図1のプラットフォーム102に類似している。しかしながら、プラットフォーム202は、表面210内へと形成された円錐形のキャビティ214を含む。キャビティ214は、内面216を含む。内面216は、磁気ベアリング206に、移動可能な状態で接触する。内面216は、図1の内面116に類似している。追加的には、支持エレメント204及び磁気ベアリング206が、図1の支持エレメント104及び磁気ベアリング106に類似している。図1の構成100に類似して、磁気ベアリング206は、ピボットとして作用し、該ピボットの周囲において、プラットフォーム202は、任意の方向に自由に傾くことができる。
【0046】
キャビティ114の場合のように、キャビティ214は、周辺エッジ224を有しており、支持エレメント204は、外側表面226を有する。キャビティ214の周辺エッジ224と、支持エレメント204の外側表面226との間の距離が、プラットフォームの傾きの最大角、すなわちθmaxを画定する。θmaxを、キャビティ214のサイズを変更することによってか、或いは、キャビティ214及び/又は支持エレメント204の様々な形状寸法(ジオメトリ)を用いることによって、調整することができる。図2の例示的な実施形態の利点の1つは、円錐形のキャビティ214の頂点228内における磁気ベアリング206の動きが、半球形のキャビティ114の内面116に沿ったベアリング106の動きよりも制限されることである。この特徴が、構成200に対して更なる安定性を提供する。
【0047】
図3は、本発明の別の例示的な実施形態による、図2の実施形態200に類似した支持構成300の断面図であるが、該支持構成300は、V型形状のプラットフォームキャビティ314とナイフエッジ磁気ベアリング306とを有している。その小型の支持構成300を、図4に関して更に詳細に後述されるように小型の制御可能に作動させられるミラーシステムを含む様々な用途において用いることができる。該小型の支持構成300は、プラットフォーム302、支持エレメント304、及び延長されたナイフエッジ形状の磁気ベアリング306を含む。その例示的な実施形態によれば、プラットフォーム302は、対向した表面308と310とを有したほぼ円筒形である。表面308は、ほぼ円形であるが、表面310は、ほぼ環状である。プラットフォーム302は、図1及び図2のプラットフォーム102及び202にそれぞれ類似している。しかしながら、中心に位置付けられた半球形114か又は円錐形214のキャビティを有するのではなく、プラットフォーム302は、表面310内へと形成された、直径に沿って延在するv型形状のキャビティ314を含む。キャビティ314は、2つの内面316aと316bとを含み、それらが交差して、直径に沿って延在する頂点328を形成する。ナイフエッジ磁気ベアリング306は、直径に沿って延在する頂点328内において設置される。矢印330a及び330bによって示されているように、図3の実施形態300と、図1及び図2の実施形態100及び200のそれぞれとの間の重要な動作上の差異は、プラットフォーム302の動きが、単一軸か、又は直径に沿って延在する頂点328の周囲の回転に、制限されることである。幾つかの実施形態において、v型形状のキャビティ314は、310の直径全体を横切って延在する。しかしながら、他の実施形態において、v型形状のキャビティは、直径の一部に沿ってのみ延在する。
【0048】
ナイフエッジベアリング306とv型形状のキャビティ114によって課せられたピボット制限とは別の、支持構成300の残りの特徴は、支持構成100及び200の特徴とほぼ同じである。具体的には、内面316a及び316bは、キャビティ114の内面116に類似している。支持エレメント304もまた、支持エレメント104とほぼ同じである。しかしながら、レセプタクルを含むのでなく、ナイフエッジベアリング306が、支持エレメント304上のほぼ平坦な表面320に実装される。先行する例におけるように、キャビティ314は、周辺エッジ324を有し、支持エレメント304は、外側表面326を有し、それらの形状寸法(ジオメトリ)が共にプラットフォームの傾きの最大角、すなわちθmaxを画定する。
【0049】
図4は、本発明の例示的な一実施形態による、小型の作動可能なプラットフォームシステム400の断面図である。システム400は、特に、反射器/ミラーの位置決めに関して記されているが、任意の用途に関して該システム400を使用することもできる。システム400は、小型プラットフォーム402及び支持構成410と、磁気プラットフォームアクチュエータ412とを含む。システム400はまた、反射器408も含む。該反射器408を、プラットフォーム402とは分離されるようにか、又はプラットフォーム402と統合されるように、形成することができる。
【0050】
例示的な実施形態によれば、磁気プラットフォームアクチュエータ412は、4つのコイル414a〜414dと、ベース416とを備える。しかしながら、磁気プラットフォームアクチュエータ412には、任意の所望の数のコイルを含めることもできる。動作中、該コイル414a〜414dは、プラットフォーム202を動かすための制御された手法において電流によって駆動される。より具体的には、電流を、個々のコイル414a〜414dか又はコイルの組み合わせに提供することによって、プラットフォーム202が、所望の方向に傾斜させられる。例えば、コイルを、コイル414aと414cのように、対で(ペアで)動作させて、プッシュ・プル(押し・引き)のトルクを提供することができる。
【0051】
コイル414a〜414dに対する電流駆動を調整することにより、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、反射器408を、制御可能に配置することができる。例えば、電流駆動が、連続的にコイル414a〜414dを掃引することができ、それにより、プラットフォーム202が、各連続的なコイルに向って連続的に傾斜させられて、円形走査運動が形成される。代替的には、1つの軸に対して正弦波か又は矩形波を印加させる一方で、鋸歯状波形か又は三角波形によって第2の軸に対する電流をゆっくりと傾斜させることにより、ラスター走査を達成させることができる。コイル414a〜414dを、対で動作させて、2つの直交軸の周辺にトルクを生じさせることができる。正弦波と余弦波か、或いは90度だけ位相シフトさせられた矩形波のような、90度位相がずれた電流波形によって、これらの2つのコイル対を駆動させることにより、円形走査(全周走査)を達成させることができる。駆動電流の振幅を変化させて、円形走査のサイズか又は最大角を変更することができる。追加的には、コイル414a〜414dの連続的な掃引中、及び/又は連続的な掃引ごとに、電流の強度を変更することによって、任意の所望の形の連続的なラスター走査を、達成することができる。
【0052】
磁気プラットフォームアクチュエータ412は、プラットフォーム402のミラー側408の付近に配置されているように示されているが、該磁気アクチュエータ412を、小型のミラー支持構成410のプラットフォーム402の支持側404の付近を含む任意の適合可能な位置に配置することもできる。同様に、コイル414a〜414dは、互いに平行に配置されており、ベース416の周辺に沿って均等に隔置されているが、該コイル414a〜414dを、ベース416上の任意の適合可能な配置に位置付けることもできる。例示的な実施形態によれば、コイル414a〜414dは、銅で構成される。しかしながら、それらを、任意の適合可能な導体から作ることもできる。追加的には、用途に依存して、任意の所望のパターンにおいてか、或いはランダムか又はほぼランダムなパターンにおいて、コイル414a〜414dを掃引することができる。
【0053】
図5は、本発明の別の例示的な実施形態による、回転軸上に置かれている2つの軸プラットフォームのためのジンバルプラットフォームアセンブリ500の断面図である。ジンバルミラーアセンブリ500は、プラットフォーム502、支持構成504、ジンバル506、及び磁石510を備える。図6A及び図6Bは、図5のジンバル506及び磁石510の概念的な上面斜視図である。図7Aは、ジンバル506の上面図である。図5〜7Aを参照すると、この例示的な実施形態によれば、(単一プラットフォーム102及び202に類似する)単一ジンバルプレートを有するのではなく、プラットフォームアセンブリ500のジンバル506は、第1のプレート520a、第2のプレート520b、及び第3のプレート520cを含み、同心のトロイドとして構成され、該第1のプレート520aが、最も内側のトロイドになっており、該第2のプレート520bが、次のトロイドになっており、最も外側の第3のプレート520cによって続けられる。
【0054】
図6A〜図7Aに示されるように、アセンブリ500は、回転たわみ部の2つの対を含む。回転たわみ部522aと522bとの第1の対は、x軸に概して沿って延在して、最も内側のプレート520aを、中間プレート520bに対して、回転可能に相互接続する。同様に、回転たわみ部524aと524bとの第2の対は、y軸に概して沿って延在して、中間プレート520bを、最も外側のプレート520cに対して、回転可能に相互接続する。例示的な実施形態によれば、プレート520a〜520cと、たわみ部522a、522b、524a、及び524bとを含むジンバル506は、シリコンからの一枚に構築される。しかしながら、代替の例示的な実施形態によれば、任意の適合可能な材料を使用することもできる。
【0055】
図7Bは、たわみ部524aに類似した折り重ねられたたわみ部540の一部の拡大図である。たわみ部540は、部分的に組み立てられているだけであり、依然として基板に取り付けられている。追加的には、エッチングバッファ541及び側面ストップ542(これらは最終的には取り除かれることになる)と呼ばれる他のエッチングされた特徴(機能)を見ることができる。エッチングバッファ541は、ディープな反応のイオンエッチングのプラズマエッチング処理の均一性を改善するために使用される。側面ストップ542は、衝撃か又は振動に起因したプラットフォーム548及びたわみ部546の動きを制限するために使用される。様々な例示的な実施形態によれば、回転たわみ部522a−522b及び524a−524bは、約1μm〜約10μmの間の幅と、約10μm〜約100μmの厚み/深さとを有して、そのような相対運動を可能にする。図7B内に示されるように、一構成において、たわみ部522a−522b及び524a−524bの幅536は、約6μmであり、たわみ部522a−522b及び524a−524bの厚み/深さ538は、約50μmである。その例示的な実施形態によれば、回転たわみ部522a−522b及び524a−524bは、プラットフォーム502と磁石510とを支持している時には、約250Hz〜約750Hzの共振周波数を有する。例示的な一構成において、回転たわみ部522a−522b及び524a−524bは、約500Hzの共振周波数を有する。例示的なプレート520a〜520cは、約20μm〜約750μmの間の厚みを有する。例示的な一構成において、プレート520a〜520cは、約400μmの厚みを有する。一構成において、たわみ部522a−522b及び524a−524bの両セットに沿った内側プレート520a、中間プレート520b、及び外側プレート520cは、シリコンからの一枚に形成される。一構成によれば、ジンバルの最も外側のプレート520cは、約500μm〜約2mmの間の、外側の直径を有する。
【0056】
支持構成504は、ベース505、遷移部507、及び支柱509を備える。例示的なベース505は、ほぼ円形であるが、これはそうである必要が無い。遷移部507は、ベース505内の中心位置の外に軸方向に延在し、該遷移部がベース505から離れるように延びるにつれてより小さく先細りにされる直径505aを有する。支柱509は、遷移部507の外に軸方向に延在する。その先細りにされる遷移部507が、支柱509のための高められた構造上の支持を提供する。支柱509は、第1のセクション511と、第2のセクション513とを含む。第2のセクション513は、第1のセクション511に対して削減された直径を有し、第1のセクション511と第2のセクション513との間の遷移において放射状に延在するショルダー部516が形成されている。
【0057】
最も内側のプレート520aは、中心に配置されたスルー開口部521を有し、支持エレメント509における削減された直径セクション513上に、滑らすことが可能な状態で嵌合し、これにより、プレート520aが、ショルダー部516上に隣接させられ且つ設置させられる。削減された直径セクション513上に、キャップ523が嵌合して、ジンバル506を支持エレメント509上にロックさせる。幾つかの例示的な実施形態によれば、ジンバル506は、支柱509における削減された直径セクション513の周囲を回転可能である。
【0058】
しかしながら、図5〜図6Bの例示的な実施形態によれば、最も内側のプレート522aは、支柱509上に位置的に固定されており、最も内側のプレート520aに対して中間プレート520bがx軸の周りを回転することが可能となるように、たわみ部522a及び522bはサイズが合わされ且つ形づくられている(図6A内に示されている)。同様に、中間プレート520bと最も外側のプレート520cとが互いに関連してy軸の周りを回転することが可能となるように、たわみ部524a及び524bはサイズが合わされ且つ形づくられている(図6B内に示されている)。
【0059】
たわみ部522a−522b及び524a−524bに沿った中間プレート520b及び最も外側のプレート520cの傾きを調整することにより、ジンバルプラットフォーム502を、制御可能に配置することができる。プラットフォーム502の走査運動を生じさせるために、たわみ部522a−522bの周りのx軸の周りの第1の位置にプラットフォーム502を傾けることができ、次いで、たわみ部524a−524bの周りのy軸に沿った複数の位置にプラットフォーム502を傾けることができる。プラットフォーム502を、次いで、x軸の周りの第2の位置に傾けることができる。プラットフォーム502は、たわみ部522a−522bについての共振周波数を有することができ、これにより、その共振周波数の付近の駆動周波数において強調された動作が生じることとなる。同様に、プラットフォーム502は、たわみ部524a−524bについての共振周波数を有することができ、これにより、その共振周波数の付近の駆動周波数において強調された動作が生じることとなる。ジンバルプラットフォームアセンブリ500の共振周波数は、約50Hz〜約20kHzとすることができ、第1のたわみ部の対522a−522bについての共振周波数は、第2のたわみ部の対524a−524bの共振周波数にほぼ類似したものとすることができるか、又は第2のたわみ部の対524a−524bの共振周波数とは実質的に異なるものとすることができる。他の可能性のある走査運動は、円形走査を含み、両軸に沿って傾くことを含む。プラットフォーム502の制御可能な動作は、図8に関して更に詳細に説明される。
【0060】
図5の断面図内に示されるように、磁石510もまた、トロイド形状にされており、放射状に内部に延びるショルダー部526を有する内壁528を備える。磁石510がジンバル506の上に実装されていることにより、ショルダー部526は、最も外側のジンバルプレート520cの外側の周辺に隣接することとなり且つ該周辺によって支持されることとなる。図5のその特定の構成において、ショルダー部は、壁528に沿って軸方向に配置されており、その結果、壁528は、支持ベース505に向ってジンバル506を通り越して、軸方向に延在する。
【0061】
プラットフォーム502は、対向したほぼ円形の表面508及び512を有したほぼ円筒形のディスク形状を有する。プラットフォーム表面512は、磁石510の最も上側の表面530上に実装される。プラットフォーム502は、約0.3mm〜約5cmの間の、外側の直径514を有する。プラットフォーム102、202、及び302の場合のように、表面508と512とが、ほぼ円形になっているように示されているが、それらは、任意の適合可能な幾何学形状を有することもできる。該幾何学形状には、任意の適合可能な多角形か又は卵形の形状を有することも含まれる(但し、これらに限定されない)。
【0062】
プラットフォーム102、202、及び302の場合のようにまた、プラットフォーム502の表面508は、反射性であるか、又は反射性である一部を含む。代替的には、表面508には、反射性コーティングか又は他の処置を含めることができる。該表面は、ほぼ平坦になっているように示されているが、該表面は、任意の適合可能な形状とすることができる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及びファセット部分の任意の適合可能な組み合わせを含む(但し、これらに限定されない)。
【0063】
図5の例示的な実施形態によれば、プラットフォーム502を、シリコンか、プラスチックか、ガラスか、又は任意の他の適合可能な反射性材料から構築することができる。支持エレメント504は、非磁性体であり、例えば、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構成される。好適な例示的な実施形態によれば、ジンバル506を、シリコンから構築することができる。しかしながら、任意の他の適合可能な材料を使用することもできる。磁石510を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0064】
代替の構成において、ジンバル506上に実装されたトロイド状の磁石510を用いるのではなく、ジンバル506上に実装された1つか又は複数の磁石をアセンブリ500が含む。一例において、そのような磁石は、プラットフォーム502の下側512上に実装される。代替的には、磁性コーティングを、プラットフォーム502の下側512に適用することができる。トロイド状の磁石510か、磁性コーティングか、或いはプラットフォーム502に実装された1つか又は複数の磁石を使用する例において、プラットフォーム502は、それ自体が強磁性材料から形成される必要がない。
【0065】
プラットフォーム502は、x及びy軸の周りの3次元空間内において制御可能に移動可能である。利点の1つによれば、キャップ523によってジンバル506の内側プレート520aが支持エレメント504にしっかりと結合されるので、ジンバルプラットフォームアセンブリ500を、ユニットとして、3次元空間に対する任意の所望の配向に、回転させ且つ移動させることができる。
【0066】
図8Aは、本発明の例示的な一実施形態による、図5〜7B内に図示されたタイプのジンバルアセンブリ810と、磁気プラットフォームアクチュエータ812とを含むシステム800の概念図の断面図である。ジンバルアセンブリ810は、図5のジンバルアセンブリ500に類似しており、プラットフォーム802、支持エレメント804、ジンバル806、及び磁石808を含む。例示的な支持エレメント804は、ジンバル806のほぼ中心に配置されている。
【0067】
概して、磁気プラットフォームアクチュエータ812は、図8Bの上面斜視図内に示されているように、4つのコイル8141〜814dを含む。しかしながら、図8Aの断面図800内では、アクチュエータ812の2つのコイル814a−814bだけが示されている。他の例示的な実施形態によれば、磁気プラットフォームアクチュエータ812には、任意の所望の数のコイルを含めることができる。コイル814a及び814bは、コイル支持816a及び816b上に実装されている。動作中、コイル814a〜814bは、図4に関して上述された手法とほぼ同じ手法で、制御される手法において駆動される。
【0068】
磁気プラットフォームアクチュエータ812は、ジンバルミラーアセンブリ810のミラー側809の付近に配置されているように示されているが、磁気アクチュエータ812を、プラットフォーム802の支持ベース805側の付近を含む任意の適合可能な位置に配置することもできる。同様に、コイル814a及び814bは、互いに平行に配置されているが、図4に関して上記に説明された配置のように、コイル814a及び814bを、任意の適合可能な配置に位置付けることができる。例示的な実施形態によれば、コイル814a及び814bは、銅から構築される。しかしながら、それらを任意の適合可能な材料から作ることもできる。
【0069】
例示的な一実施形態によれば、コイル支持816a−816bは、非磁性体とすることができる。一構成において、コイル支持816a−816bは、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な非磁性材料から構築される。代替の例示的な一実施形態によれば、コイル支持816a−816bを、軟質磁性材料から構築することができる。該軟質磁性材料は、パーマロイか、CoFeか、合金1010鋼か、又は任意の他の適合可能な軟質磁性材料などである。
【0070】
図9A〜9Eは、本発明の他の例示的な実施形態による、小型ジンバルミラーアセンブリを示す。以前に説明した静止した中心支持構成の実施形態とは対照的に、図9A〜図9Eの例示的な実施形態は、静止したか又は回転するフレーム/支持に対して回転可能に実装された移動可能なプラットフォームを有する。より具体的には、図9Aは、本発明の例示的な一実施形態による、移動可能な内部プラットフォームを有するジンバルミラーアセンブリ900を示す。ジンバルミラーアセンブリ900は、プラットフォーム902、フレーム904、及び回転たわみ部906a〜906bを含む。図9B〜9Dは、図9Aのジンバルミラーアセンブリ900の更なる例示的な実施形態を示す。
【0071】
図9A〜9Dを参照すると、フレーム904は、ほぼ八角形であり、大きな八角形のスルー開口部912を有している。プラットフォーム902は、概して長方形であり、フレーム904の開口部912内において配置されている。しかしながら、プラットフォーム902とフレーム904とは、任意の適合可能な形状を有することもできる。例示的な実施形態によれば、内部プラットフォーム902が、第1の回転たわみ部906aと第2の回転たわみ部906bとによってフレーム904に取り付けられている。回転たわみ部906a−906bは、プラットフォーム902のほぼ対向する側面上に実装されている(又は形成されている)。これにより、回転たわみ部906a−906bが、プラットフォーム902の1つの軸(例えば、y軸)に沿ってほぼ位置合わせされる。回転たわみ部906a及び906bは、図7A及び7Bに関してその図面内に示され且つ説明された回転たわみ部524a及び524bにほぼ等しい。1つの特徴によれば、プラットフォーム902は、y軸の周りを回転たわみ部906a及び906bを介して回転するが、外側フレーム904は、静止したままである。しかしながら、図10及び図11に関して更に詳細に下記において説明されるように、フレーム904を、支持構成に対して回転可能に実装することもできる。
【0072】
その例示的な実施形態によれば、外側フレーム904は、第1のレセプタクル908aと第2のレセプタクル908bとを含む。レセプタクル908a及び908bは、フレーム904のほぼ対向する側面内に形成される。これにより、レセプタクル908a及び908bは、x軸に沿ってほぼ位置合わせされることとなる。レセプタクル908a及び908bは、内側部分914a及び914bと、外側部分916a及び916bとを有しており、内側部分914a及び914bは、外側部分916a及び916bの幅920よりも広い幅918を有した状態になっている。
【0073】
図10〜11に関して更に詳細に説明されるように、フレーム904を支持構成に回転可能に実装するために、レセプタクル908a及び908bを用いることができる。1つの特徴によれば、支持構成に実装される時には、外側プラットフォーム904は、x軸の周りを回転することができる。
【0074】
図9A及び9D内において最も明確に示されているように、プラットフォーム902は、表面909に取り付けられた磁石910を含む。磁石910は、ほぼ平坦になっているように示されているが、該磁石910は、任意の適合可能な形状とすることができ、及び任意の適合可能なサイズとすることができる。追加的には、磁石910は、表面909の一部だけを覆うことが可能である。代替的な一実施形態によれば、ジンバルプラットフォームアセンブリ900は、表面909に取り付けられた複数の磁石910を含む。例示的な実施形態によれば、磁石910は磁性体であり、該磁石910を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0075】
図9C内において最も明確に示されているように、プラットフォーム902はまた、表面909に対向する、プラットフォーム902の表面上に、反射性構成要素911も含む。例示的な一実施形態によれば、反射性構成要素911はミラーであり、該反射性構成要素911を、シリコンか、プラスチックか、ガラスか、又は任意の他の適合可能な材料から構築することができる。代替の例示的な一実施形態によれば、反射性構成要素911は、反射性コーティングとして形成される。追加的には、反射性構成要素911は、ほぼ平坦になっているように示されているが、該反射性構成要素911は、任意の適合可能な形状とすることができる。該形状は、凸形か、凹形か、又はファセットを含むか、或いは平坦、凸形、凹形、及び/又はファセット部分の任意の組み合わせを含む(但し、これらに限定されない)。
【0076】
その例示的な実施形態によれば、プラットフォーム902、フレーム904、及び回転たわみ部906a−906bを備えるジンバルアセンブリ900を、シリコンからの一枚に構築することができる。しかしながら、任意の他の適合可能な材料を用いることもできる。プラットフォーム902とフレーム904とは、非磁性体とすることができ、該プラットフォーム902とフレーム904とを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、プラットフォーム902とフレーム904とは、磁性体とすることができ、該プラットフォーム902とフレーム904とを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。その例示的な実施形態によれば、磁石910を、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0077】
図9B〜9D内に示されるように、ジンバルアセンブリ900にはまた、第1のスピンドル932aと第2のスピンドル932bとを含めることができる。スピンドル932a−932bは、フレーム904に結合されるか、又はフレーム904に統合されるように形成されて、レセプタクル908a−908b内へと嵌合するよう形づくられる。その例示的な実施形態によれば、スピンドル932a−932bは、内側部分934a−934bと、外側部分936a−936bとを有する。スピンドル932a−932bの内側部分934a及び934bは、スピンドル934a−934bの外側部分936a及び936bの幅918よりも広い幅940を有する。
【0078】
例示的な一実施形態によれば、第1のスピンドル932aと第2のスピンドル932bが、それぞれ、第1のレセプタクル908a内と第2のレセプタクル908b内において位置的に固定される。しかしながら、代替の例示的な一実施形態によれば、スピンドル932a−932bは、レセプタクル908a−908b内において回転可能に配置される。図9C及び9D内において最も明確に示されるように、外側部分936a及び936bは、ほぼ円筒形であり、図11〜12に関してより詳細に後述されるように、支持構成に対してフレーム904を回転可能に実装するのに適している。
【0079】
スピンドル932a−932bを、フレーム904の残りのものと共に、シリコンからの1枚に構築することができるか、或いは、任意の適合可能なスピンドル材料を用いてフレーム904から分離するように構築することができる。スピンドル932a−932bは、非磁性体とすることができ、及び、スピンドル932a−932bを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、スピンドル932a−932bは、磁性体とすることができ、スピンドル932a−932bを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0080】
図9Eは、図9A〜9Dのアセンブリ900に類似したジンバルアセンブリ960を示すが、フレーム964内に統合されるように形成されたスピンドル962a及び962bを含んでいる。この例示的な実施形態によれば、第1のスピンドル962a及び第2のスピンドル962bは、フレーム964のほぼ対向する側面上に形成されており、これにより、それらは、x軸に沿ってほぼ位置合わせされることになる。スピンドル962a−962bは、ほぼ円筒形であるが、それらは、任意の適合可能な幾何学形状とすることもできる。スピンドル932a及び932bの場合におけるように、スピンドル962a−962bを、フレーム964を支持構成に回転可能に実装するために使用することができる。
【0081】
その例示的な実施形態によれば、スピンドル962a−962bは、フレーム964と同じ材料から構築され、スピンドル962a−962bを、シリコンから、フレーム964と共に一枚に、形成することができる。しかしながら、任意の他の適合可能な材料を使用することもできる。フレーム964及びスピンドル962a−962bは、非磁性体とすることができ、フレーム964及びスピンドル962a−962bを、チタンか、アルミニウムか、真鍮か、青銅か、プラスチックか、又は任意の他の適合可能な材料から構築することができる。代替的には、フレーム964及びスピンドル962a−962bは、磁性体とすることができ、フレーム964及びスピンドル962a−962bを、NdFeBか、SmCoか、フェライトか、Pt−Coか、AlNiCoか、又は任意の他の適合可能な磁性材料から構築することができる。
【0082】
図9Fは、ラスター走査を生じさせるために、ミラーシステムを制御するための方法の例示的な一実施形態による、相対的なプラットフォームとフレームの位置を示すグラフ980である。グラフ980は、ある時間にわたる、例示的なラスター走査傾斜角度を示している。実線は、プラットフォーム902の傾斜角度を示しており、示されているように、正弦波曲線状に変化している。プラットフォーム902の動きの周波数は、プラットフォーム902と磁石910とを支持している回転たわみ部906a及び906bの共振周波数に対応する。点線は、フレーム904の傾斜角度を表しており、この実施例によれば、三角波の傾斜状に変化している。回転たわみ部906a及び906bの周囲において、典型的にはプラットフォーム902の動きよりも実質的に遅い周波数で、フレーム904はスピンドル932a及び932bに沿って前後に傾く。1つの特徴によれば、システム500とは対照的に、回転たわみ部の第2の対の代りにスピンドル932a及び932bを用いることは、グラフ980内に示されている非共振の傾きを、より容易に可能にする。プラットフォーム902とフレーム904との組み合わされた動きは、2軸のラスター走査動作を生じさせる。
【0083】
より具体的には、一構成によれば、図9F内に示されているように、ピーク傾斜角度は、各軸周辺のいずれかの方向におけるプラットフォーム902の機械的回転における10度であり、これにより、各軸に沿って40度の総合的な光学走査が生じる結果となる。図9F内において、例示を目的とするために、速軸の共振は20Hzであり、傾斜期間は1秒である。他の実施例において、機械的回転のピーク角度は、約3度〜約45度の間とすることができ、これにより、各軸に沿って約12度と約180度の総合的な光学走査が生じる結果となる。速軸の共振は、プラットフォームと磁石とを加えた回転たわみ部の共振周波数にほぼ等しいものとすることができ、約100Hz〜約20kHzの間とすることができる。傾斜期間は、約1/40秒〜約10秒の間とすることができる。
【0084】
図10は、本発明の例示的な一実施形態による、図9Bのジンバルプラットフォームアセンブリ900と、磁気プラットフォームアクチュエータ1112とを含む小型の作動可能に移動可能なプラットフォームシステム1100を示す。磁気プラットフォームアクチュエータ1112は、y軸の周りにプラットフォーム902を回転させるための第1のy軸磁気コイル1114及び第2のy軸磁気コイル(図示せず)と、x軸の周りにフレーム904を回転させるための第1のx軸磁気コイル1116a及び第2のx軸磁気コイル1116bとを含む。
【0085】
その例示的な実施形態によれば、磁気コイル1114aを含むy軸磁気コイルは、フレーム904のほぼ下に配置され、x軸コイル1116aと1116bとの間のy軸のいずれかの側の長手方向に延在し、x軸コイル1116aと1116bとが、互いにほぼ平行にとなり合う。第2のy軸磁気コイルは、ジンバルプラットフォームアセンブリ900によって覆い隠されている。x軸コイル1116a−1116bは、トロイド形状にされており、x軸及びz軸から等しい距離の、フレーム904のいずれかの側に配置されている。動作中、x軸コイル116a及び116bに電流を提供することにより、フレーム904が、スピンドル936a及び936bを介してx軸の周りに回転させられる。同様に、コイル1114aを含むy軸コイルに電流を提供することにより、プラットフォーム902が、たわみ部906a及び906bを介してy軸の周りに回転させられる。
【0086】
図11は、本発明の別の例示的な実施形態による、磁気アクチュエータ1212内においてジンバルプラットフォームアセンブリ900が回転可能に実装された代替の例示的な一実施形態を示す。磁気アクチュエータ1212は、支持構成1218と、ベース1216と、4つの磁気コイル支持1214a〜1214dとを備える。支持フレーム1218は、第1の支持エレメント1220aと第2の支持エレメント1220bとを含む。支持エレメント1220a−1220bの各々は、プラットフォームアセンブリ900のスピンドル936a−936bを受容するためのレセプタクル1222aと1222bをそれぞれ含む。レセプタクル1222a及び1222bは、切り込み(ノッチ)として図示されている。しかしながら、それらは、回転可能にスピンドル936a−936bに嵌合させるための溝か、チャンネルか、トンネルか、又は任意の他の適合可能な形状とすることもできる。1つの例示的な特徴によれば、スピンドル936a及び936bをレセプタクル1222a及び1222b内に確保するために、カバー1224aと1224bを、レセプタクル1222a上と1222b上にそれぞれ実装することができる。
【0087】
磁気プラットフォームアクチュエータ1212は、4つのコイル支持1214a〜1214dと共に示されているが、任意の所望の数のコイル支持を用いることもできる。動作中には、図4内に示されたようなコイルが、コイル支持1214a〜1214dの周りに巻かれている。そのコイルを、図4に関連して上記に説明したような類似のやり方で、プラットフォーム902を動かすための、制御される手法において、駆動することができる。より具体的には、コイル1214b及び1214dに対して駆動電流を供給することにより、フレーム904が、スピンドル936a及び936bの周りに回転させられることになる一方で、コイル1214a及び1214cに対して駆動電流を供給することにより、プラットフォームが、たわみ部906a及び906bの周りに回転させられることになる。利用可能なコイルに対して提供される駆動電流のパターンを変化させることにより、3次元空間に対するプラットフォーム902の所望の動きを達成することができる。上記に説明された用途におけるように、例えば、光学ビームのステアリングか、撮像か、又は他の用途の場合に、図10及び図11の構成を用いることができる。
【0088】
図12は、本発明の例示的な一実施形態による、プラットフォーム位置検知のための構成の概念図1400である。概念図1400は、プラットフォーム1402の位置を検知するための磁気センサ1404を含む。プラットフォーム1402は、磁性体であるか、又は該プラットフォーム1402に実装された1つか又は複数の磁石を含んでいるかのいずれかである。その例示的な実施形態によれば、磁気センサ1404は、プラットフォーム1402の磁界に基づき、該プラットフォーム1402の傾斜の角度を測定することが可能なホール効果センサである。プラットフォーム1402が、2つの軸の周りに傾くと、ホール効果センサ1404が、プラットフォーム1402の軸の傾きを測定する。
【0089】
その例示的な実施形態によれば、概念図1400は、プラットフォーム1402についての、θx及びθyの2つの角度を示す。磁気センサ1404は、少なくとも2軸の磁気センサであり、少なくともBx及びByの電圧出力を有する。しかしながら、Bx、By、及びBzの電圧出力を有する3軸磁気センサ1404を用いることもできる。その例示的な実施形態によれば、Bz出力を用いて、Bx及びBy出力を正規化することができる。磁気センサ1404は、プラットフォーム1402の傾きθx及びθyの両角度を測定し、各角度θx及びθyのサイン(正弦)に比例した電圧出力を有する。1つの特徴によれば、このことが、スムーズでほぼ線形な出力を生じる結果となり、図13に関して更に詳細に説明されるように、これを、プラットフォーム1402の角度θx及びθyを制御するために用いることができる。
【0090】
例示的な一実施形態によれば、プラットフォーム1402の磁気特性によって生じさせられた磁界が、図1400内に示されるように、半径r方向とθ方向とに沿ったその構成要素によって提供される。式1〜4(下記)内において、rは、プラットフォーム1402の磁気ダイポールの中心1406から、磁気センサ1404への距離であり、θは、プラットフォーム1402のz軸と、磁気センサ1404の位置との間の傾きの角度である。
【0091】
【数1】
ここで、θは、プラットフォーム1402の傾きの角度であり、rは、プラットフォーム1402の磁気ダイポールの中心から磁気センサ1404までの距離であり、μ0は、自由空間の透磁率(透過率)であり、mは、プラットフォーム1402内に含まれる磁気ダイポール磁石である。
【0092】
別の例示的な実施形態によれば、式3〜4内に示されるような正規化定数BX0又はBY0を使用せずに、3軸磁気センサ1404が用られて回転角が測定される。
【0093】
【数2】
ここで、θx及びθyは、それぞれx軸及びy軸におけるプラットフォーム1402の傾きであり、Bx、By、及びBzは、それぞれx軸、y軸、及びz軸に沿ったセンサ1404における磁界成分であり、BX0又はBY0は、正規化定数であり、90度の回転における磁界を表す。
【0094】
図13は、プラットフォーム位置を制御するための、且つ、図13内に示されたタイプのプラットフォーム検知構成を用いるための制御システムによって使用される処理を説明する流れ図1500である。その方法は、設定ポイント、すなわちラスター走査のためのターゲットポイントにより開始する(ステップ1502)。該設定ポイントは、プラットフォームの角度を制御する角度制御回路構成に送られる(ステップ1504)。該角度制御回路構成は、プラットフォームの所望の傾きに関する情報を、駆動回路に送る(ステップ1506)。該駆動回路は、この情報を駆動コイル上に送り(ステップ1508)、磁界を調整する。これにより、プラットフォームが回転させられる(ステップ1510)。磁気センサが、プラットフォームにより結果として生成される磁界を検知し、実際のプラットフォームの傾きを決定する(ステップ1514)。この情報は、前記角度制御回路構成に戻すように送られ、該角度制御回路構成は、次いで、必要に応じてプラットフォームの傾きを再調整することができる。
【図面の簡単な説明】
【0095】
【図1】本発明の例示的な一実施形態による、半球形のプラットフォームキャビティを有した磁気的に支援されたピボットインターフェースを有する支持構成の断面図である。
【図2】本発明の代替の例示的な一実施形態による、図1の実施形態に類似した支持構成であるが、円錐形のプラットフォームキャビティを有する支持構成の断面図である。
【図3】本発明の別の例示的な実施形態による、図1の実施形態に類似した支持構成であるが、v型形状のプラットフォームキャビティを有する支持構成の断面図である。
【図4】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータと共に図2の支持構成を含むシステムの図である。
【図5】本発明の別の例示的な実施形態による、プラットフォームにおける複数軸の配置のためのジンバルアセンブリの断面図であり、該ジンバルアセンブリは、静止した中心支持構成を有している。
【図6A】y軸の周りを例示的に回転させられる図5のアセンブリと共に使用されるための例示的なジンバルプラットフォームアセンブリの上面斜視図である。
【図6B】x軸の周りを例示的に回転させられる図6Aのジンバルプラットフォームアセンブリの上面斜視図である。
【図7A】本発明の例示的な一実施形態による、統合されるように形成された回転たわみ部を用いている、図5〜6B内において図示されたタイプのジンバルプラットフォームアセンブリの上面図である。
【図7B】図7Aの回転たわみ部に類似した、部分的に組み立てられた折り重ねられた回転たわみ部の拡大図である。
【図8A】本発明の例示的な一実施形態による、図5〜7に図示されたタイプのジンバルプラットフォームアセンブリと、磁気プラットフォームアクチュエータとを含むシステムの断面概念図である。
【図8B】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータの断面概念図である。
【図9A】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9B】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9C】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9D】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9E】本発明の様々な追加的な例示的な実施形態による、静止した外側フレームを有するプラットフォームにおける複数軸の配置のためのジンバルプラットフォームアセンブリを示す図である。
【図9F】本発明の例示的な一実施形態による、ある時間にわたる共振速軸と非共振遅軸の傾きについての例示的なラスター走査角度を示すグラフである。
【図10】本発明の例示的な一実施形態による、磁気プラットフォームアクチュエータと共に図9Bのジンバルプラットフォームアセンブリを含む支持システムを示す図である。
【図11】本発明の代替の例示的な一実施形態による、図10内に示されたタイプの支持システムであるが、磁気プラットフォームアクチュエータを用いている支持システムを示す図である。
【図12】本発明の例示的な一実施形態による、プラットフォーム位置検知のための構成の概念図である。
【図13】プラットフォーム位置を制御するための、且つ、図12内に示されたタイプのプラットフォーム検知構成を用いるための、制御システムを示すブロック図である。
【特許請求の範囲】
【請求項1】
第1及び第2の端部を有する支持エレメント含む支持アセンブリであって、該第1の端部が、永久磁石を含むことからなる、支持アセンブリと、
第1及び第2の対向する側面を有するプラットフォームを含むプラットフォームアセンブリであって、該第1の側面が、前記支持エレメントの前記第1の端部に接触し且つ磁気的に結合されていることにより、該プラットフォームが、少なくとも第1の面と第2の面との間において自由に傾くことになり、前記第2の側面が反射器を含むことからなる、プラットフォームアセンブリ
とを備える、小型の作動可能なプラットフォームシステム。
【請求項2】
前記永久磁石を含めるために、前記支持エレメントの前記第1の端部に位置的に固定された磁気ベアリングを備える、請求項1に記載のプラットフォームシステム。
【請求項3】
前記永久磁石を含めるために、磁気ベアリングを受容するため前記第1の端部においてレセプタクルを前記支持エレメントが備える、請求項1に記載のプラットフォームシステム。
【請求項4】
前記磁気ベアリングが、前記レセプタクル内において位置的に固定されている、請求項3に記載のプラットフォームシステム。
【請求項5】
前記磁気ベアリングが、前記レセプタクル内において回転可能に設置されている、請求項3に記載のプラットフォームシステム。
【請求項6】
前記プラットフォームアセンブリが、永久磁石である少なくとも一部分を含む、請求項1に記載のプラットフォームシステム。
【請求項7】
前記プラットフォームアセンブリの永久磁石が、前記支持エレメントの永久磁石と相互作用して、バネ復元力を形成する、請求項6に記載のプラットフォームシステム。
【請求項8】
前記バネ復元力が、前記支持エレメント上の前記プラットフォームをセンタリングするように作用する、請求項7に記載のプラットフォームシステム。
【請求項9】
前記プラットフォームアセンブリに取り付けられた、少なくとも1つの磁石を備える、請求項1に記載のプラットフォームシステム。
【請求項10】
前記プラットフォームアセンブリが、前記第1の側面内に形成されたキャビティを含み、前記支持エレメントの前記第1の端部は、前記キャビティ内において、前記プラットフォームアセンブリの前記プラットフォームの第1の表面に接触していることからなる、請求項1に記載のプラットフォームシステム。
【請求項11】
前記キャビティが半球形である、請求項10に記載のプラットフォームシステム。
【請求項12】
前記キャビティが円錐形である、請求項10に記載のプラットフォームシステム。
【請求項13】
前記キャビティが、v型形状であり、及び前記プラットフォームアセンブリの直径の少なくとも一部に沿って延在する、請求項10に記載のプラットフォームシステム。
【請求項14】
前記磁気ベアリングがある表面を有しており、該ある表面は、低摩擦係数のコーティングを有していることからなる、請求項3に記載のプラットフォームシステム。
【請求項15】
前記コーティングが、Cr、Al2O3、Si3N4、及び、ダイヤモンドのような炭素のうちの1つである、請求項14に記載のプラットフォームシステム。
【請求項16】
前記キャビティが、ある表面を有しており、該表ある面は、低摩擦係数のコーティングを有していることからなる、請求項10に記載のプラットフォームシステム。
【請求項17】
前記コーティングが、Cr、Al2O3、Si3N4、及び、ダイヤモンドのような炭素のうちの1つである、請求項16に記載のプラットフォームシステム。
【請求項18】
前記キャビティが、強磁性材料から形成された表面を有している、請求項10に記載のプラットフォームシステム。
【請求項19】
前記プラットフォームを制御可能に傾けるための磁界を提供するためのアクチュエータを備える、請求項1に記載のプラットフォームシステム。
【請求項20】
前記アクチュエータが、動作コイルを介して提供された電流駆動に応答して磁界を生成させるための該動作コイルを含む、請求項19に記載のプラットフォームシステム。
【請求項21】
少なくとも1つの軸に対する前記プラットフォームの傾きの角度を検知するための少なくとも1つの磁気センサを備える、請求項1に記載のプラットフォームシステム。
【請求項22】
第1、第2、及び第3のトロイド状のジンバルプレートを有するジンバルであって、該第1のジンバルプレートは、放射状に最も内側のプレートになっており、該第3のジンバルプレートは、放射状に最も外側のジンバルプレートになっており、及び、該第2のジンバルプレートは、該第1のジンバルプレートと該第3のジンバルプレートとの中間に放射状に配置されていることからなる、ジンバルと、
第1の軸に沿って前記第1のジンバルプレートと前記第2のジンバルプレートとの間に延在する回転たわみ部の第1の対と、
第2の軸に沿って前記第2のジンバルプレートと前記第3のジンバルプレートとの間に延在する回転たわみ部の第2の対と、
前記ジンバルを支持するために、前記第1のジンバルプレートに機械的に結合させるための支持アセンブリと、
前記ジンバル上に実装された磁石と、
前記磁石上に実装されたプラットフォーム
とを備える、小型の作動可能なプラットフォームアセンブリ。
【請求項23】
前記第1、第2、及び第3のジンバルプレートと、前記たわみ部の第1及び第2の対とが、単一に形成されている、請求項22に記載のシステム。
【請求項24】
前記磁石が、ジンバルの周囲のうちの少なくとも一部の周りに延在する、請求項22に記載のシステム。
【請求項25】
前記プラットフォームの表面上において反射器を備える、請求項22に記載のシステム。
【請求項26】
前記磁石を引き寄せて、少なくとも第1の面から少なくとも第2の面に前記プラットフォームを傾けるための駆動電流に応答して、磁界を生成するための少なくとも1つのコイルを備える、請求項22に記載のシステム。
【請求項27】
フレームと、
プラットフォームと、
前記フレーム内において前記プラットフォームを回転可能につるすための、一対の回転たわみ部であって、該回転たわみ部が、第1の軸に沿って配置されていることからなる、一対の回転たわみ部と、
前記フレームを回転可能に支持するための支持構成であって、前記第1の軸にほぼ直交する回転軸を有する、支持構成と、
前記フレームに対する前記プラットフォームの回転位置を制御するための少なくとも第1の磁気コイルと、
前記支持構成に対する前記フレームの回転位置を制御するための少なくとも第2の磁気コイル
とを備える、小型の作動可能なプラットフォームアセンブリ。
【請求項28】
前記支持構成と前記フレームとを回転可能に結合させるための一対のスピンドルを備え、該スピンドルが、前記第1の軸にほぼ直交する第2の軸に沿って配置されていることからなる、請求項27に記載のシステム。
【請求項29】
前記プラットフォームの第1の表面上にミラーを備える、請求項27に記載のシステム。
【請求項30】
前記プラットフォームの第2の表面上に磁石を備える、請求項29に記載のシステム。
【請求項31】
前記プラットフォームの回転の角度を検知するためのプラットフォーム位置センサを備える、請求項27に記載のシステム。
【請求項32】
前記フレームの回転の角度を検知するためのフレーム位置センサを備える、請求項31に記載のシステム。
【請求項33】
ラスター走査を生じさせる方法であって、
一対のたわみ部によってフレーム内において第1の軸の周りに回転するようにつるされたプラットフォーム上のミラーを、該第1の軸の周りの第1の位置に傾け、
回転する前記たわみ部の共振周波数において、第2の軸の周りを回転する前記フレームを共振させ、及び、
前記ミラーを、前記第1の軸の周りにおいて、該第1の軸の周りの第2の位置に傾ける
ことを含む、方法。
【請求項34】
磁気センサによって、前記プラットフォーム及び前記フレームの傾きについてのフィードバックを提供することを含む、請求項33に記載の方法。
【請求項35】
前記第1の軸が、零のバネ復元力を有する、請求項34に記載の方法。
【請求項1】
第1及び第2の端部を有する支持エレメント含む支持アセンブリであって、該第1の端部が、永久磁石を含むことからなる、支持アセンブリと、
第1及び第2の対向する側面を有するプラットフォームを含むプラットフォームアセンブリであって、該第1の側面が、前記支持エレメントの前記第1の端部に接触し且つ磁気的に結合されていることにより、該プラットフォームが、少なくとも第1の面と第2の面との間において自由に傾くことになり、前記第2の側面が反射器を含むことからなる、プラットフォームアセンブリ
とを備える、小型の作動可能なプラットフォームシステム。
【請求項2】
前記永久磁石を含めるために、前記支持エレメントの前記第1の端部に位置的に固定された磁気ベアリングを備える、請求項1に記載のプラットフォームシステム。
【請求項3】
前記永久磁石を含めるために、磁気ベアリングを受容するため前記第1の端部においてレセプタクルを前記支持エレメントが備える、請求項1に記載のプラットフォームシステム。
【請求項4】
前記磁気ベアリングが、前記レセプタクル内において位置的に固定されている、請求項3に記載のプラットフォームシステム。
【請求項5】
前記磁気ベアリングが、前記レセプタクル内において回転可能に設置されている、請求項3に記載のプラットフォームシステム。
【請求項6】
前記プラットフォームアセンブリが、永久磁石である少なくとも一部分を含む、請求項1に記載のプラットフォームシステム。
【請求項7】
前記プラットフォームアセンブリの永久磁石が、前記支持エレメントの永久磁石と相互作用して、バネ復元力を形成する、請求項6に記載のプラットフォームシステム。
【請求項8】
前記バネ復元力が、前記支持エレメント上の前記プラットフォームをセンタリングするように作用する、請求項7に記載のプラットフォームシステム。
【請求項9】
前記プラットフォームアセンブリに取り付けられた、少なくとも1つの磁石を備える、請求項1に記載のプラットフォームシステム。
【請求項10】
前記プラットフォームアセンブリが、前記第1の側面内に形成されたキャビティを含み、前記支持エレメントの前記第1の端部は、前記キャビティ内において、前記プラットフォームアセンブリの前記プラットフォームの第1の表面に接触していることからなる、請求項1に記載のプラットフォームシステム。
【請求項11】
前記キャビティが半球形である、請求項10に記載のプラットフォームシステム。
【請求項12】
前記キャビティが円錐形である、請求項10に記載のプラットフォームシステム。
【請求項13】
前記キャビティが、v型形状であり、及び前記プラットフォームアセンブリの直径の少なくとも一部に沿って延在する、請求項10に記載のプラットフォームシステム。
【請求項14】
前記磁気ベアリングがある表面を有しており、該ある表面は、低摩擦係数のコーティングを有していることからなる、請求項3に記載のプラットフォームシステム。
【請求項15】
前記コーティングが、Cr、Al2O3、Si3N4、及び、ダイヤモンドのような炭素のうちの1つである、請求項14に記載のプラットフォームシステム。
【請求項16】
前記キャビティが、ある表面を有しており、該表ある面は、低摩擦係数のコーティングを有していることからなる、請求項10に記載のプラットフォームシステム。
【請求項17】
前記コーティングが、Cr、Al2O3、Si3N4、及び、ダイヤモンドのような炭素のうちの1つである、請求項16に記載のプラットフォームシステム。
【請求項18】
前記キャビティが、強磁性材料から形成された表面を有している、請求項10に記載のプラットフォームシステム。
【請求項19】
前記プラットフォームを制御可能に傾けるための磁界を提供するためのアクチュエータを備える、請求項1に記載のプラットフォームシステム。
【請求項20】
前記アクチュエータが、動作コイルを介して提供された電流駆動に応答して磁界を生成させるための該動作コイルを含む、請求項19に記載のプラットフォームシステム。
【請求項21】
少なくとも1つの軸に対する前記プラットフォームの傾きの角度を検知するための少なくとも1つの磁気センサを備える、請求項1に記載のプラットフォームシステム。
【請求項22】
第1、第2、及び第3のトロイド状のジンバルプレートを有するジンバルであって、該第1のジンバルプレートは、放射状に最も内側のプレートになっており、該第3のジンバルプレートは、放射状に最も外側のジンバルプレートになっており、及び、該第2のジンバルプレートは、該第1のジンバルプレートと該第3のジンバルプレートとの中間に放射状に配置されていることからなる、ジンバルと、
第1の軸に沿って前記第1のジンバルプレートと前記第2のジンバルプレートとの間に延在する回転たわみ部の第1の対と、
第2の軸に沿って前記第2のジンバルプレートと前記第3のジンバルプレートとの間に延在する回転たわみ部の第2の対と、
前記ジンバルを支持するために、前記第1のジンバルプレートに機械的に結合させるための支持アセンブリと、
前記ジンバル上に実装された磁石と、
前記磁石上に実装されたプラットフォーム
とを備える、小型の作動可能なプラットフォームアセンブリ。
【請求項23】
前記第1、第2、及び第3のジンバルプレートと、前記たわみ部の第1及び第2の対とが、単一に形成されている、請求項22に記載のシステム。
【請求項24】
前記磁石が、ジンバルの周囲のうちの少なくとも一部の周りに延在する、請求項22に記載のシステム。
【請求項25】
前記プラットフォームの表面上において反射器を備える、請求項22に記載のシステム。
【請求項26】
前記磁石を引き寄せて、少なくとも第1の面から少なくとも第2の面に前記プラットフォームを傾けるための駆動電流に応答して、磁界を生成するための少なくとも1つのコイルを備える、請求項22に記載のシステム。
【請求項27】
フレームと、
プラットフォームと、
前記フレーム内において前記プラットフォームを回転可能につるすための、一対の回転たわみ部であって、該回転たわみ部が、第1の軸に沿って配置されていることからなる、一対の回転たわみ部と、
前記フレームを回転可能に支持するための支持構成であって、前記第1の軸にほぼ直交する回転軸を有する、支持構成と、
前記フレームに対する前記プラットフォームの回転位置を制御するための少なくとも第1の磁気コイルと、
前記支持構成に対する前記フレームの回転位置を制御するための少なくとも第2の磁気コイル
とを備える、小型の作動可能なプラットフォームアセンブリ。
【請求項28】
前記支持構成と前記フレームとを回転可能に結合させるための一対のスピンドルを備え、該スピンドルが、前記第1の軸にほぼ直交する第2の軸に沿って配置されていることからなる、請求項27に記載のシステム。
【請求項29】
前記プラットフォームの第1の表面上にミラーを備える、請求項27に記載のシステム。
【請求項30】
前記プラットフォームの第2の表面上に磁石を備える、請求項29に記載のシステム。
【請求項31】
前記プラットフォームの回転の角度を検知するためのプラットフォーム位置センサを備える、請求項27に記載のシステム。
【請求項32】
前記フレームの回転の角度を検知するためのフレーム位置センサを備える、請求項31に記載のシステム。
【請求項33】
ラスター走査を生じさせる方法であって、
一対のたわみ部によってフレーム内において第1の軸の周りに回転するようにつるされたプラットフォーム上のミラーを、該第1の軸の周りの第1の位置に傾け、
回転する前記たわみ部の共振周波数において、第2の軸の周りを回転する前記フレームを共振させ、及び、
前記ミラーを、前記第1の軸の周りにおいて、該第1の軸の周りの第2の位置に傾ける
ことを含む、方法。
【請求項34】
磁気センサによって、前記プラットフォーム及び前記フレームの傾きについてのフィードバックを提供することを含む、請求項33に記載の方法。
【請求項35】
前記第1の軸が、零のバネ復元力を有する、請求項34に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6A】
【図6B】
【図7A】
【図7B】
【図8A】
【図8B】
【図9A】
【図9B】
【図9C】
【図9D】
【図9E】
【図9F】
【図10】
【図11】
【図12】
【図13】
【公表番号】特表2009−520220(P2009−520220A)
【公表日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2008−545853(P2008−545853)
【出願日】平成18年12月15日(2006.12.15)
【国際出願番号】PCT/US2006/047960
【国際公開番号】WO2007/075445
【国際公開日】平成19年7月5日(2007.7.5)
【出願人】(591044474)ザ・チャールズ・スターク・ドレイパー・ラボラトリー・インコーポレイテッド (8)
【Fターム(参考)】
【公表日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願日】平成18年12月15日(2006.12.15)
【国際出願番号】PCT/US2006/047960
【国際公開番号】WO2007/075445
【国際公開日】平成19年7月5日(2007.7.5)
【出願人】(591044474)ザ・チャールズ・スターク・ドレイパー・ラボラトリー・インコーポレイテッド (8)
【Fターム(参考)】
[ Back to top ]