
可動機械用の位置監視システム
可動機械(20)および中央制御ステーション(30)を有するシステム(10)を提供する。可動機械は、通信装置(70)と、測位衛星(40)から位置データを受信するとともに位置信号を生成するように構成された受信機(55)を有する位置監視システム(50)とを有する。位置監視システムはまた、センサ(61、62、63)を有し、可動機械のパラメータを測定するとともに移動信号を生成するように構成された、慣性航法装置(60)も有する。位置監視システムはまた、位置信号および移動信号を受信し、位置信号が受信できないことを検出し、位置パラメータを計算し、パラメータの第1値と第2値との差が所定閾値を超えるか否かを確定し、警報信号を生成するように構成された、コントローラ(65)も有する。中央制御ステーションは、コントローラと通信し、位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。

【発明の詳細な説明】
【技術分野】
【0001】
本開示は、概して位置監視システムに関し、より詳細には、可動機械用の位置監視システムに関する。
【背景技術】
【0002】
土木機械等の可動機械において、位置を監視し機械の移動を案内する位置監視システムが採用されてきた。通常の位置監視システムは、複数のGPS(全地球測位システム)衛星から位置データを受信するように可動機械に搭載されている、GPS受信機を含む。状況によっては、たとえば、機械がトンネル内を移動している時、GPS信号が受信できなくなる場合がある。こうした状況では、GPSシステムを補完し、可動機械のための位置データを提供するために、慣性航法システムを採用することができる。こうした慣性航法システムは、通常、速度センサ、加速度センサ、ジャイロスコープ等、さまざまな慣性センサを有している。
【0003】
2008年5月8日に公開されたTakaoka他による(特許文献1)(’166公開公報)に、ナビゲーション装置が記載されている。’166公開公報のナビゲーション装置は、GPS信号を受信し処理するGPS処理部と加速度センサとを有している。GPS信号が受信できなくなると、加速度センサによって提供される加速度信号と、GPS信号が受信できなくなる前に先に受信されたGPS信号からさまざまなパラメータを学習する演算処理装置の学習部によって提供される学習結果とに基づいて、位置データが計算される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願公開第2008/0109166A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
’166公開公報のナビゲーション装置は、GPS信号が受信できなくなった時に自律位置データを提供することができるが、そのナビゲーション装置には問題がある可能性がある。たとえば、GPS処理部および加速度センサの少なくとも一方が誤動作し誤った位置データを提供する可能性があり、’166公開公報のナビゲーション装置は、こうした誤動作を診断し検出することができない可能性がある。
【0006】
本開示は、既存の技術における改善に関する。
【課題を解決するための手段】
【0007】
一態様では、本開示はシステムに関する。本システムは可動機械を有し、可動機械は、通信装置と可動機械に関連付けられた位置監視システムとを有する。位置監視システムは、測位衛星から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成された受信機を有する。受信機は、可動機械に搭載されている。位置監視システムはまた、センサを有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成された慣性航法装置も有する。慣性航法装置は、可動機械に搭載されている。位置監視システムはまた、受信機および慣性航法装置に関連付けられたコントローラも有する。コントローラは、位置信号が受信可能である場合に位置信号を受信し、移動信号を受信し、位置信号が受信できないことを検出するように構成されている。コントローラはまた、受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、差が所定閾値を超えると確定した後に警報信号を生成するようにも構成されている。本システムはまた、中央制御ステーションも有し、それは、通信装置を介してコントローラと通信し、通信装置を介して位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。
【0008】
別の態様では、本開示はシステムに関する。本システムは可動機械を有し、可動機械は、通信装置と可動機械に関連付けられた位置監視システムとを有する。位置監視システムは、測位衛星から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成された受信機を有する。受信機は、可動機械に搭載されている。位置監視システムはまた、センサを有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成された慣性航法装置も有する。慣性航法装置は、可動機械に搭載されている。位置監視システムはまた、受信機および慣性航法装置に関連付けられたコントローラも有する。コントローラは、位置信号が受信可能である場合に位置信号を受信し、移動信号を受信し、位置信号が受信できないことを検出するように構成されている。コントローラはまた、受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、差が所定閾値を超えると確定した後に警報信号を生成するようにも構成されている。本システムはまた、中央制御ステーションも有し、それは、通信装置を介してコントローラと通信し、通信装置を介して位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。位置監視システムは、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システムをさらに有する。コントローラは、同じパラメータの第3値を計算し、同じパラメータの第1値、第2値および第3値を比較し、第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定するようにさらに構成されている。コントローラは、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成されている。
【図面の簡単な説明】
【0009】
【図1】例示的な位置監視システムを有する例示的な開示されているシステムの概略図である。
【図2】図1の開示されている位置監視システムの例示的な動作の概略図である。
【図3】図1の開示されている位置監視システムの例示的な動作の概略図である。
【図4】図1の開示されている位置監視システムの例示的な動作の概略図である。
【発明を実施するための形態】
【0010】
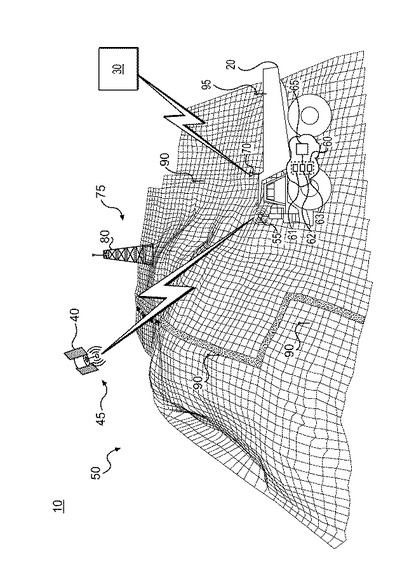
図1は、例示的なシステム10の概略図である。システム10を、採掘現場および工事現場等における可動機械管理等、多種多様の応用で採用することができる。システム10はネットワーク化された作業現場であってもよい。システム10は、少なくとも1つの可動機械20を含むことができる。システム10はまた、たとえば有線手段または無線手段を介して可動機械20に信号を送信しかつ可動機械20から信号を受信することにより、可動機械20と通信するように構成された、中央制御ステーション30を有することができる。中央制御ステーション30を、作業現場に配置してもよく、または遠隔に配置してもよい。
【0011】
システム10は、位置監視システム50を有することができ、それは、可動機械20および/または中央制御ステーション30のための位置データを提供するように構成された少なくとも1つの測位システムまたは装置を有することができる。たとえば、位置監視システム50は全地球測位システム(GPS)45を有することができ、それは、少なくとも1つのGPS衛星40と通信するように構成されている受信機55を有することができる。受信機55を、可動機械20に搭載することができ、GPS衛星40から位置データを受信するように構成することができる。受信機55は、受信されたGPS位置データに基づいて測位信号を生成することができる。受信機55はまた、GPS衛星40に信号を送信することも可能であることが企図されている。たとえば可動機械20がトンネル内を移動している時、衛星40からのGPS信号が受信機55によって受信できなくなった場合、たとえば受信機55により、GPS信号が受信できないことを示す信号を生成することができる。
【0012】
位置監視システム50はまた、可動機械20の位置を監視する少なくとも1つまたは複数の追加の測位システムを有することができる。たとえば、位置監視システム50は慣性航法装置60を有することができる。
【0013】
慣性航法装置60を、可動機械20に搭載することができる。慣性航法装置60は、可動機械20の移動に関連する1つまたは複数のパラメータを測定するように構成された1つまたは複数のセンサを有することができる。一実施形態では、図1に示すように、慣性航法装置60は、速度センサ61、加速度センサ62および操舵方向センサ63を有することができる。速度センサ61を、可動機械20の速度を測定するように構成することができる。加速度センサ62を、可動機械20の加速度を測定するように構成することができる。操舵方向センサ63を、可動機械20の操舵または移動方向を測定するように構成することができる。慣性航法装置60は、他のタイプのセンサを有することができ、より多いかまたは少ないセンサを有することができることが企図されている。たとえば、いくつかの実施形態では、慣性航法装置60は速度センサ61を有していなくてもよい。いくつかの実施形態では、慣性航法装置60は、可動機械20の位置の高度を測定するように構成された気圧計、可動機械20の移動距離を測定するように構成された走行距離計等の追加のセンサを有することができる。いくつかの実施形態では、慣性航法装置60はジャイロスコープを有することができ、それは、構成要素として加速度センサ62を有することができる。
【0014】
いくつかの実施形態では、位置監視システム50は、可動機械20の位置、速度、加速度、高度、角速度、ピッチレート等の移動パラメータを確定するように構成された地上ベース測位システム75をさらに有することができる。地上ベース測位システム75は、たとえばレーザベースの測位システム等、任意の好適な地上ベース測位システムであってもよい。地上ベース測位システム75は、ステーション80、受信装置95および複数の装置90を有することができる。ステーション80を、信号を発信しかつ/または受信するように構成することができ、受信装置95および装置90の少なくとも一方と通信するように構成することができる。
【0015】
受信装置95を、ステーション80から信号を受信するように可動機械20に搭載することができる。装置90は、センサ、発信機または受信機であってもよく、装置90を、地上のさまざまな位置に配置することができる。装置90は、受信装置95および/またはステーション80と通信して、可動機械20の移動パラメータを確定することができる。地上ベース測位システム75は、中央制御ステーション30と通信することができる。たとえば、ステーション80、装置90および受信装置95のうちの少なくとも1つは、中央制御ステーション30に測定された移動パラメータを送信することができる。中央制御ステーション30はまた、ステーション80、装置90および受信装置95のうちの少なくとも1つにコマンド信号を送信することも可能である。地上ベース測位システム75は、たとえばレーザ地上ベース測位システム等、任意の好適な地上ベースシステムであってもよく、より多いか少ない構成要素を含むことができることが企図されている。
【0016】
位置監視システム50は、コントローラ65を有することができる。コントローラ65を、可動機械20に搭載することができ、または他の好適な位置、たとえば中央制御ステーション30に配置することができる。可動機械20は、中央制御ステーション30と通信するように構成されている通信装置70を有することができる。コントローラ65は、可動機械20に搭載された既存のマシンコントローラかまたはスタンドアロンコントローラであってもよい。コントローラ65は、さまざまなシステムおよび装置、たとえば、受信機55、通信装置70および慣性航法装置60のうちの少なくとも1つと通信することができる。コントローラ65はまた、ステーション80、装置90および受信装置95のうちの少なくとも1つと通信することも可能である。コントローラ65と他のシステムまたは装置との間の通信は、本技術分野において既知である有線手段または無線手段であり得る。図1に示すように、コントローラ65は、速度センサ61、加速度センサ62および/または操舵方向センサ63等、慣性航法装置60内に設けられているセンサと通信することができる。コントローラ65を、GPS信号が受信可能である時に受信機55によって生成される位置信号を受信するように構成することができる。GPS信号が受信機55によって受信できなくなると、コントローラ65もまた、GPS信号が受信できないことを示す、受信機55によって生成された信号を受信することができる。したがって、コントローラ65を、GPS信号が受信可能であることおよび/または受信不可能であることを検出するように構成することができる。
【0017】
コントローラ65を、検知された移動パラメータに基づいて、速度センサ61、加速度センサ62および/または操舵方向センサ63によってそれぞれ生成され得る、可動機械20の速度、加速度および/または移動方向を示す信号等、慣性航法装置60によって生成される移動信号を受信するように構成することも可能である。コントローラ65は、受信された移動信号を処理して、可動機械20の位置に関連するパラメータを計算することができる。コントローラ65はまた、通信装置70を介して中央制御ステーション30からコマンド信号を受信することができる。逆に、コントローラ65は、可動機械20の位置を示す位置信号、警報信号等の信号を、通信装置70を介して中央制御ステーション30に送信することができる。
【0018】
一実施形態では、コントローラ65を、地上ベース測位システム75によって生成される測位信号を受信するように構成することも可能である。一実施形態では、地上ベース測位システム75によって生成される測位信号を中央制御ステーション30に送信することができ、中央制御ステーション30は、その測位信号を、通信装置70を介してコントローラ65に送信することができる。一実施形態では、コントローラ65を、中央制御ステーション30内に配置することができ、コントローラ65は、中央制御ステーション30において地上ベース測位システム75から送信される測位信号を受信することができる。
【産業上の利用可能性】
【0019】
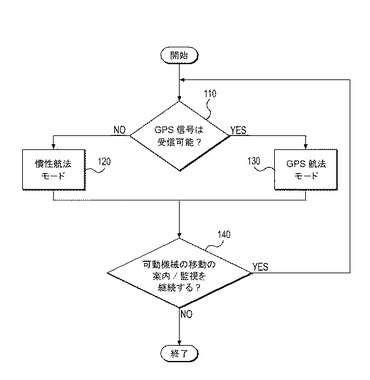
開示した位置監視システム50の例示的な動作プロセスを、図2に示すフローチャートに概略的に示す。ステップ110において、位置監視システム50は、GPS信号が受信可能であるか否かを確定することができる。GPS信号が受信可能であるか否かの確定を、コントローラ65によって行うことができる。通常の動作状態で、すなわち、GPS信号が受信可能である場合、受信機55は、GPS衛星40から位置データを受信することができ、受信された位置データに基づいて位置信号を生成することができる。受信機55は、位置信号をコントローラ65に送信することができる。GPS信号が受信機55によって受信できなくなると、たとえば、可動機械20がトンネル内を移動している時、受信機55は、GPS信号が受信できないことを示す信号を生成することができ、受信することができないことを示す信号を、コントローラ65に送信することができる。したがって、コントローラ65は、受信機55によって生成された信号に基づいて、GPS信号が受信できないことを検出しまたは確定することができる。
【0020】
GPS信号が受信可能である場合(ステップ110において、Yes)、位置監視システム50は、GPS航法モード(ステップ130)を実行して、たとえば可動機械20の移動のための位置データを提供することができる。GPS信号が受信できない場合(ステップ110において、No)、位置監視システム50は、慣性航法モード(ステップ120)を実行して、たとえば可動機械20の移動のための位置データを提供することができる。コントローラ65を、GPS信号の受信可能性の確定に基づいて慣性航法モード(第1航法モード)またはGPS航法モード(第2航法モード)を選択するように構成することができる。GPS航法モードおよび慣性航法モードの詳細については後述する。GPS航法モード(ステップ130)および慣性航法モード(ステップ120)のうちの一方を完了した後、位置監視システム50は、たとえばコントローラ65により、可動機械20の移動の案内または監視を継続すべきか否かを確定することができる(ステップ140)。コントローラ65が、可動機械20の移動の案内または監視を継続するように確定した場合(ステップ140において、Yes)、位置監視システム50は、ステップ110〜140でステップを継続することができる。コントローラ65が、可動機械20の移動の案内または監視を継続しないと確定した場合(ステップ140において、No)、位置監視システム50は、図2に示すプロセスを終了することができる。
【0021】
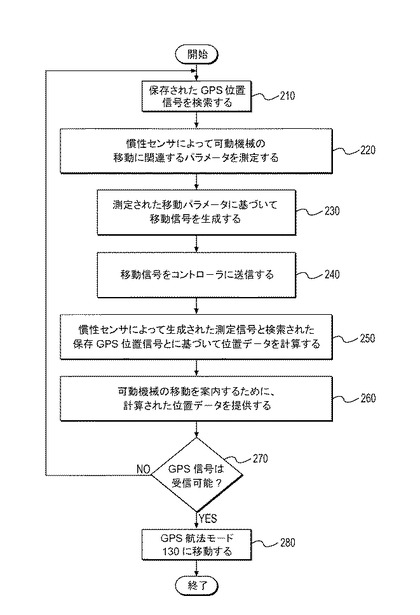
図3は、図2に示すステップ120における慣性航法モードの例示的な動作プロセスを概略的に示す。例示的な慣性航法モードを、GPS信号が受信できない時に実行することができる。コントローラ65は、たとえば、メモリ等のデータ記憶装置から、先に保存されたGPS位置信号を検索することができる(ステップ210)。一実施形態では、保存されたGPS位置信号は、GPS信号が受信できないことを検出する前に最後に保存されたGPS位置信号を含むことができる。別法として、いくつかの実施形態では、保存されたGPS位置信号は、GPS信号が受信できないことを検出する前の複数の保存されたGPS位置信号を含むことができる。ステップ220において、可動機械20の移動に関連するパラメータを、慣性航法装置60の慣性センサによって測定することができる。移動信号を、測定された移動パラメータに基づいて慣性センサによって生成することができる(ステップ230)。たとえば、速度センサ61は、可動機械20の速度を測定し、測定された速度を示す信号を生成することができる。加速度センサ62は、可動機械20の加速度を測定し、測定された加速度を示す信号を生成することができる。操舵方向センサ63は、可動機械20の移動方向を測定し、測定された移動方向を示す信号を生成することができる。これらの信号を、慣性航法装置60から処理するためにコントローラ65に送信することができる(ステップ240)。慣性センサは、連続して、移動パラメータを測定し、測定されたパラメータを示す信号を生成することができ、または移動パラメータを測定し、所定時間間隔に従って信号を生成することができる。
【0022】
さらに図3を参照すると、ステップ250において、コントローラ65は、慣性航法装置60の慣性センサによって生成された移動信号と、GPS信号が受信できないことを検出した後に受信機55によって受信された、最後に保存されたGPS位置信号等、検索された保存GPS位置信号とに基づき、位置データを計算することができる。計算された位置データは、可動機械20の現在位置、および/または推定された移動方向、速度、加速度等、可動機械20の移動に関連する任意の好適なパラメータを含むことができる。計算された位置データを、可動機械20の移動を案内するために提供することができる(ステップ260)。たとえば、コントローラ65は、計算された位置データを、有線通信手段または無線通信手段を介して可動機械20のオペレータに、または通信装置70を介して中央制御ステーション30に位置する遠隔オペレータに提供することができる。
【0023】
位置監視システム50は、ステップ260を完了した後、または別法としてステップ260を完了する前の任意の好適な時点で、GPS信号が受信可能であるか否かを監視することができる。位置監視システム50は、GPS信号が受信可能であるか否かを確定することができる(ステップ270)。GPS信号が依然として受信できない場合(ステップ270において、No)、位置監視システム50は、ステップ220〜270を実行することにより、慣性航法装置60を利用して可動機械20に対する位置データを提供し続けることができる。GPS信号が受信できない状況においてステップ220〜270が繰り返される場合、位置データの計算は、先に計算された位置データ、GPS信号が受信できないことを検出する前に保存された、検索されたGPS信号、および慣性センサによって目下測定された移動パラメータのうちの少なくとも1つに基づくことができる。GPS信号が受信可能となると(ステップ270において、Yes)、位置監視システム50は、図2のステップ130に示すGPS航法モードに進むことができ(ステップ280)、図3に示す慣性航法モードを終了することができる。
【0024】
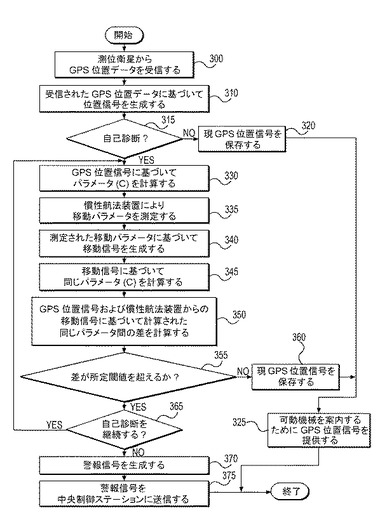
図4は、図2のステップ130に示す例示的なGPS航法モードを概略的に示す。この例示的なGPS航法モードでは、受信機55は、GPS衛星40からGPS位置データを受信することができる(ステップ300)。受信機55は、受信されたGPS位置データに基づいてGPS位置信号を生成することができる(ステップ310)。GPS位置信号を、受信機55からコントローラ65に送信することができる。コントローラ65は、受信機55から送信されたGPS位置信号を受信し、自己診断が実行されるべきか否かを確定することができる(ステップ315)。コントローラ65は、自己診断が実行されるべきではないと確定した場合(ステップ315において、No)、受信されたGPS位置信号を処理し、受信されたGPS位置信号を保存する。一実施形態では、コントローラ65は、受信されたGPS位置信号を、最後に受信されたGPS信号として保存することができる(ステップ320)。自己診断を実行するべきか否かを確定するために、コントローラ65は、可動機械20のオペレータから、または中央制御ステーション30のオペレータから入力を受け取ることができることが企図される。自己診断が実行されるべきでない場合(ステップ315において、No)、GPS位置信号を、たとえば中央制御ステーション30にさらに提供することができ、または可動機械20の移動を案内するためにコントローラ65によってさらに処理することができる(ステップ325)。ステップ320の前にステップ325を実行することができることが企図される。図4に示す実施形態では、ステップ325が完了した後、GPS航法モードを終了することができる。GPS航法モードが終了した後、位置監視システム50は、図1に示すステップ140を実行することができる。
【0025】
さらに図4を参照すると、コントローラ65は、自己診断が実行されるべきであると確定した場合(ステップ315において、Yes)、受信されたGPS位置信号に基づいてパラメータCの第1値を計算することができる(ステップ330)。パラメータCは、受信されたGPS位置信号と慣性センサによって生成された移動信号とに基づいて計算することができる任意の好適なパラメータであり得る。たとえば、パラメータCは、可動機械20の現在位置、または可動機械20の移動の速度、加速度および/または操舵方向であってもよい。
【0026】
慣性航法装置60は、1つまたは複数の慣性センサによって、可動機械20の移動に関連するパラメータを測定することができる(ステップ335)。たとえば、速度センサ61は、可動機械20の速度を測定することができ、加速度センサ62は、可動機械20の加速度を測定することができ、操舵方向センサ63は、可動機械20の操舵方向または移動方向を測定することができる。慣性航法装置60は、測定された移動パラメータを示す移動信号を生成することができ、移動信号をコントローラ65に送信することができる(ステップ340)。コントローラ65は、慣性航法装置60によって生成された移動信号を受信しかつ処理することができる。コントローラ65は、受信された移動信号に基づいて同じパラメータCの第2値を計算することができる(ステップ345)。別法として、いくつかの実施形態では、慣性航法装置60は、慣性センサによって生成された移動信号を処理し、同じパラメータCの第2値を計算するように構成されたプロセッサを含むことができる。プロセッサによって計算された同じパラメータCの第2値を、ステップ330においてGPS信号に基づいて計算された同じパラメータCの第1値と比較するためにコントローラ65に送信することができる。
【0027】
GPS位置信号に基づいて同じパラメータCの第1値を計算し(ステップ300)、移動信号に基づいて第2値を計算した(ステップ345)後、コントローラ65は、同じパラメータCの第1値と第2値との差を計算することができる(ステップ350)。コントローラ65は、差が所定閾値を超えるか否かを確定することができる(ステップ355)。たとえば、コントローラ65は、それぞれGPS位置信号に基づいて計算された可動機械20の位置と移動信号に基づいて計算された可動機械20の位置との差が、所定閾値を超えるか否かを確定することができる。その差が所定閾値を上回る場合(ステップ355において、Yes)、それは、たとえばGPS受信機55および慣性航法装置60のうちの一方の誤動作を示す場合があり、コントローラ65は、自己診断が継続され繰り返されるべきであるか否かを確定することができる。コントローラ65、可動機械20のオペレータ、または中央制御ステーション30のオペレータが、自己診断を継続するように確定した場合、ステップ330〜355を繰り返すことができる。自己診断が継続されるべきでないと確定された場合(ステップ365において、No)、コントローラ65は、警報信号を生成することができ(ステップ370)、警報信号を、通信装置70を介して中央制御ステーション30に送信することができる(ステップ375)。警報信号が中央制御ステーション30に送信された後、GPS航法モードを終了することができる。警報信号は、GPS受信機55または慣性航法装置60のうちの少なくとも一方が正常に機能していない可能性があり、さらなる診断、修理または交換が必要である可能性があることを示すことができる。
【0028】
ステップ355を参照すると、同じパラメータCの第1値と第2値との差が所定閾値を超えない場合(ステップ355において、No)、コントローラ65は、受信されたGPS位置信号を、たとえば、メモリ等の記憶装置に保存することができる(ステップ360)。一実施形態では、コントローラ65は、受信されたGPS位置信号を最後に受信されたGPS信号として保存することができる。受信されたGPS位置信号を、可動機械20の移動を案内するために提供することができる(ステップ325)。たとえば、受信されたGPS位置信号を、通信装置70を介して中央制御ステーション30に送信することができ、または可動機械20に搭載されているディスプレイに表示することができる。ステップ325が完了した後、GPS航法モードを終了することができる。
【0029】
いくつかの実施形態では、可動機械20の位置を監視するために、GPS45、慣性航法装置60および地上ベース測位システム75のすべてを合わせて採用することができる。たとえば、中央制御ステーション30またはコントローラ65は、GPS45、慣性航法装置60および地上ベース測位システム75の各々によって生成される位置データを受信することができ、受信された位置データに基づいて、1つまたは複数のシステムが正常に動作していないか否かを診断することができる。コントローラ65は、地上ベース測位システム75によって生成される位置データに基づいて同じパラメータCの第3値を計算することができる。コントローラ65は、GPS45、慣性航法装置60および地上ベース測位システム75のすべてによって提供される位置データを用いて、自己診断が行われるべきか否かを確定することができる。自己診断を、第1値、第2値および第3値に基づいて行うことができる。コントローラ65は、同じパラメータCの第1値、第2値および第3値を比較し、第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの間との差が所定閾値を超えるか否かを確定することができる。たとえば、第2値および第3値が互いに近い場合、かつ第1値と第2値および第3値との差が所定閾値を超える場合、コントローラ65は、第1値が間違っているかまたは無効である可能性があると確定することができる。これは、GPS45が正常に動作していない可能性があり、受信機55によって提供される位置データが、可動機械20の移動を監視し案内するために信頼できない可能性があることを示すことができる。こうした状況では、GPS信号が、たとえばGPS信号が受信できないために無効である場合、慣性航法装置60および地上ベース測位システム75のうちの少なくとも一方が、可動機械20の移動を監視し案内するために位置データを提供することができる。一方で、同じパラメータCの第1値、第2値および第3値間の差が所定閾値内である場合、それは、GPS45、慣性航法装置60および地上ベース測位システム75のすべてが正常に動作しており、GPSシステム45、慣性航法装置60および地上ベース測位システム75の各々によって提供される位置データを、可動機械20の移動を案内するために用いることができることを示すことができる。コントローラ65は、自己診断が行われた後、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えないと確定した後、受信されたGPS位置信号を最後のGPS位置信号として保存することができる。これにより、可動機械20を案内するために提供される位置データの正確さを確実にすることができる。
【0030】
開示した位置監視システムを、任意の可動機械においてその可動機械の位置を監視しかつ/または移動を案内するために採用することができる。慣性航法装置および地上ベース測位システムのうちの少なくとも一方が、GPS位置信号が受信できない時に可動機械の移動を案内するための位置データを提供することができる。GPS位置信号が受信可能である場合、慣性航法装置および地上ベース測位システムのうちの少なくとも一方を使用して、GPS信号が有効であるか否かを検証することができる。自動自己診断を定期的に実行することにより、慣性航法装置および地上ベース測位システムのうちの少なくとも一方によって提供されるGPS信号および/または他の測位信号の有効性を確実にすることができる。一方で、自己診断はまた、任意の測位システムが適切に機能していないか否かを示すことも可能である。開示した位置測定システムは、可動機械20の位置監視の信頼性および品質を向上させることができる。
【0031】
当業者には、開示した位置測定システムにおいてさまざまな変更および変形を行うことができることが明らかとなろう。本明細書における開示した実施形態の仕様および実施を考慮することにより、当業者には他の実施形態が明らかとなろう。仕様および例は、単に例示するものとして考慮され、本開示の真の範囲は以下の特許請求の範囲によって示されていることが意図されている。
【技術分野】
【0001】
本開示は、概して位置監視システムに関し、より詳細には、可動機械用の位置監視システムに関する。
【背景技術】
【0002】
土木機械等の可動機械において、位置を監視し機械の移動を案内する位置監視システムが採用されてきた。通常の位置監視システムは、複数のGPS(全地球測位システム)衛星から位置データを受信するように可動機械に搭載されている、GPS受信機を含む。状況によっては、たとえば、機械がトンネル内を移動している時、GPS信号が受信できなくなる場合がある。こうした状況では、GPSシステムを補完し、可動機械のための位置データを提供するために、慣性航法システムを採用することができる。こうした慣性航法システムは、通常、速度センサ、加速度センサ、ジャイロスコープ等、さまざまな慣性センサを有している。
【0003】
2008年5月8日に公開されたTakaoka他による(特許文献1)(’166公開公報)に、ナビゲーション装置が記載されている。’166公開公報のナビゲーション装置は、GPS信号を受信し処理するGPS処理部と加速度センサとを有している。GPS信号が受信できなくなると、加速度センサによって提供される加速度信号と、GPS信号が受信できなくなる前に先に受信されたGPS信号からさまざまなパラメータを学習する演算処理装置の学習部によって提供される学習結果とに基づいて、位置データが計算される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許出願公開第2008/0109166A1号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
’166公開公報のナビゲーション装置は、GPS信号が受信できなくなった時に自律位置データを提供することができるが、そのナビゲーション装置には問題がある可能性がある。たとえば、GPS処理部および加速度センサの少なくとも一方が誤動作し誤った位置データを提供する可能性があり、’166公開公報のナビゲーション装置は、こうした誤動作を診断し検出することができない可能性がある。
【0006】
本開示は、既存の技術における改善に関する。
【課題を解決するための手段】
【0007】
一態様では、本開示はシステムに関する。本システムは可動機械を有し、可動機械は、通信装置と可動機械に関連付けられた位置監視システムとを有する。位置監視システムは、測位衛星から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成された受信機を有する。受信機は、可動機械に搭載されている。位置監視システムはまた、センサを有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成された慣性航法装置も有する。慣性航法装置は、可動機械に搭載されている。位置監視システムはまた、受信機および慣性航法装置に関連付けられたコントローラも有する。コントローラは、位置信号が受信可能である場合に位置信号を受信し、移動信号を受信し、位置信号が受信できないことを検出するように構成されている。コントローラはまた、受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、差が所定閾値を超えると確定した後に警報信号を生成するようにも構成されている。本システムはまた、中央制御ステーションも有し、それは、通信装置を介してコントローラと通信し、通信装置を介して位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。
【0008】
別の態様では、本開示はシステムに関する。本システムは可動機械を有し、可動機械は、通信装置と可動機械に関連付けられた位置監視システムとを有する。位置監視システムは、測位衛星から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成された受信機を有する。受信機は、可動機械に搭載されている。位置監視システムはまた、センサを有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成された慣性航法装置も有する。慣性航法装置は、可動機械に搭載されている。位置監視システムはまた、受信機および慣性航法装置に関連付けられたコントローラも有する。コントローラは、位置信号が受信可能である場合に位置信号を受信し、移動信号を受信し、位置信号が受信できないことを検出するように構成されている。コントローラはまた、受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、差が所定閾値を超えると確定した後に警報信号を生成するようにも構成されている。本システムはまた、中央制御ステーションも有し、それは、通信装置を介してコントローラと通信し、通信装置を介して位置信号および/または移動信号を受信し、可動機械の位置を監視するように構成されている。位置監視システムは、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システムをさらに有する。コントローラは、同じパラメータの第3値を計算し、同じパラメータの第1値、第2値および第3値を比較し、第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定するようにさらに構成されている。コントローラは、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成されている。
【図面の簡単な説明】
【0009】
【図1】例示的な位置監視システムを有する例示的な開示されているシステムの概略図である。
【図2】図1の開示されている位置監視システムの例示的な動作の概略図である。
【図3】図1の開示されている位置監視システムの例示的な動作の概略図である。
【図4】図1の開示されている位置監視システムの例示的な動作の概略図である。
【発明を実施するための形態】
【0010】
図1は、例示的なシステム10の概略図である。システム10を、採掘現場および工事現場等における可動機械管理等、多種多様の応用で採用することができる。システム10はネットワーク化された作業現場であってもよい。システム10は、少なくとも1つの可動機械20を含むことができる。システム10はまた、たとえば有線手段または無線手段を介して可動機械20に信号を送信しかつ可動機械20から信号を受信することにより、可動機械20と通信するように構成された、中央制御ステーション30を有することができる。中央制御ステーション30を、作業現場に配置してもよく、または遠隔に配置してもよい。
【0011】
システム10は、位置監視システム50を有することができ、それは、可動機械20および/または中央制御ステーション30のための位置データを提供するように構成された少なくとも1つの測位システムまたは装置を有することができる。たとえば、位置監視システム50は全地球測位システム(GPS)45を有することができ、それは、少なくとも1つのGPS衛星40と通信するように構成されている受信機55を有することができる。受信機55を、可動機械20に搭載することができ、GPS衛星40から位置データを受信するように構成することができる。受信機55は、受信されたGPS位置データに基づいて測位信号を生成することができる。受信機55はまた、GPS衛星40に信号を送信することも可能であることが企図されている。たとえば可動機械20がトンネル内を移動している時、衛星40からのGPS信号が受信機55によって受信できなくなった場合、たとえば受信機55により、GPS信号が受信できないことを示す信号を生成することができる。
【0012】
位置監視システム50はまた、可動機械20の位置を監視する少なくとも1つまたは複数の追加の測位システムを有することができる。たとえば、位置監視システム50は慣性航法装置60を有することができる。
【0013】
慣性航法装置60を、可動機械20に搭載することができる。慣性航法装置60は、可動機械20の移動に関連する1つまたは複数のパラメータを測定するように構成された1つまたは複数のセンサを有することができる。一実施形態では、図1に示すように、慣性航法装置60は、速度センサ61、加速度センサ62および操舵方向センサ63を有することができる。速度センサ61を、可動機械20の速度を測定するように構成することができる。加速度センサ62を、可動機械20の加速度を測定するように構成することができる。操舵方向センサ63を、可動機械20の操舵または移動方向を測定するように構成することができる。慣性航法装置60は、他のタイプのセンサを有することができ、より多いかまたは少ないセンサを有することができることが企図されている。たとえば、いくつかの実施形態では、慣性航法装置60は速度センサ61を有していなくてもよい。いくつかの実施形態では、慣性航法装置60は、可動機械20の位置の高度を測定するように構成された気圧計、可動機械20の移動距離を測定するように構成された走行距離計等の追加のセンサを有することができる。いくつかの実施形態では、慣性航法装置60はジャイロスコープを有することができ、それは、構成要素として加速度センサ62を有することができる。
【0014】
いくつかの実施形態では、位置監視システム50は、可動機械20の位置、速度、加速度、高度、角速度、ピッチレート等の移動パラメータを確定するように構成された地上ベース測位システム75をさらに有することができる。地上ベース測位システム75は、たとえばレーザベースの測位システム等、任意の好適な地上ベース測位システムであってもよい。地上ベース測位システム75は、ステーション80、受信装置95および複数の装置90を有することができる。ステーション80を、信号を発信しかつ/または受信するように構成することができ、受信装置95および装置90の少なくとも一方と通信するように構成することができる。
【0015】
受信装置95を、ステーション80から信号を受信するように可動機械20に搭載することができる。装置90は、センサ、発信機または受信機であってもよく、装置90を、地上のさまざまな位置に配置することができる。装置90は、受信装置95および/またはステーション80と通信して、可動機械20の移動パラメータを確定することができる。地上ベース測位システム75は、中央制御ステーション30と通信することができる。たとえば、ステーション80、装置90および受信装置95のうちの少なくとも1つは、中央制御ステーション30に測定された移動パラメータを送信することができる。中央制御ステーション30はまた、ステーション80、装置90および受信装置95のうちの少なくとも1つにコマンド信号を送信することも可能である。地上ベース測位システム75は、たとえばレーザ地上ベース測位システム等、任意の好適な地上ベースシステムであってもよく、より多いか少ない構成要素を含むことができることが企図されている。
【0016】
位置監視システム50は、コントローラ65を有することができる。コントローラ65を、可動機械20に搭載することができ、または他の好適な位置、たとえば中央制御ステーション30に配置することができる。可動機械20は、中央制御ステーション30と通信するように構成されている通信装置70を有することができる。コントローラ65は、可動機械20に搭載された既存のマシンコントローラかまたはスタンドアロンコントローラであってもよい。コントローラ65は、さまざまなシステムおよび装置、たとえば、受信機55、通信装置70および慣性航法装置60のうちの少なくとも1つと通信することができる。コントローラ65はまた、ステーション80、装置90および受信装置95のうちの少なくとも1つと通信することも可能である。コントローラ65と他のシステムまたは装置との間の通信は、本技術分野において既知である有線手段または無線手段であり得る。図1に示すように、コントローラ65は、速度センサ61、加速度センサ62および/または操舵方向センサ63等、慣性航法装置60内に設けられているセンサと通信することができる。コントローラ65を、GPS信号が受信可能である時に受信機55によって生成される位置信号を受信するように構成することができる。GPS信号が受信機55によって受信できなくなると、コントローラ65もまた、GPS信号が受信できないことを示す、受信機55によって生成された信号を受信することができる。したがって、コントローラ65を、GPS信号が受信可能であることおよび/または受信不可能であることを検出するように構成することができる。
【0017】
コントローラ65を、検知された移動パラメータに基づいて、速度センサ61、加速度センサ62および/または操舵方向センサ63によってそれぞれ生成され得る、可動機械20の速度、加速度および/または移動方向を示す信号等、慣性航法装置60によって生成される移動信号を受信するように構成することも可能である。コントローラ65は、受信された移動信号を処理して、可動機械20の位置に関連するパラメータを計算することができる。コントローラ65はまた、通信装置70を介して中央制御ステーション30からコマンド信号を受信することができる。逆に、コントローラ65は、可動機械20の位置を示す位置信号、警報信号等の信号を、通信装置70を介して中央制御ステーション30に送信することができる。
【0018】
一実施形態では、コントローラ65を、地上ベース測位システム75によって生成される測位信号を受信するように構成することも可能である。一実施形態では、地上ベース測位システム75によって生成される測位信号を中央制御ステーション30に送信することができ、中央制御ステーション30は、その測位信号を、通信装置70を介してコントローラ65に送信することができる。一実施形態では、コントローラ65を、中央制御ステーション30内に配置することができ、コントローラ65は、中央制御ステーション30において地上ベース測位システム75から送信される測位信号を受信することができる。
【産業上の利用可能性】
【0019】
開示した位置監視システム50の例示的な動作プロセスを、図2に示すフローチャートに概略的に示す。ステップ110において、位置監視システム50は、GPS信号が受信可能であるか否かを確定することができる。GPS信号が受信可能であるか否かの確定を、コントローラ65によって行うことができる。通常の動作状態で、すなわち、GPS信号が受信可能である場合、受信機55は、GPS衛星40から位置データを受信することができ、受信された位置データに基づいて位置信号を生成することができる。受信機55は、位置信号をコントローラ65に送信することができる。GPS信号が受信機55によって受信できなくなると、たとえば、可動機械20がトンネル内を移動している時、受信機55は、GPS信号が受信できないことを示す信号を生成することができ、受信することができないことを示す信号を、コントローラ65に送信することができる。したがって、コントローラ65は、受信機55によって生成された信号に基づいて、GPS信号が受信できないことを検出しまたは確定することができる。
【0020】
GPS信号が受信可能である場合(ステップ110において、Yes)、位置監視システム50は、GPS航法モード(ステップ130)を実行して、たとえば可動機械20の移動のための位置データを提供することができる。GPS信号が受信できない場合(ステップ110において、No)、位置監視システム50は、慣性航法モード(ステップ120)を実行して、たとえば可動機械20の移動のための位置データを提供することができる。コントローラ65を、GPS信号の受信可能性の確定に基づいて慣性航法モード(第1航法モード)またはGPS航法モード(第2航法モード)を選択するように構成することができる。GPS航法モードおよび慣性航法モードの詳細については後述する。GPS航法モード(ステップ130)および慣性航法モード(ステップ120)のうちの一方を完了した後、位置監視システム50は、たとえばコントローラ65により、可動機械20の移動の案内または監視を継続すべきか否かを確定することができる(ステップ140)。コントローラ65が、可動機械20の移動の案内または監視を継続するように確定した場合(ステップ140において、Yes)、位置監視システム50は、ステップ110〜140でステップを継続することができる。コントローラ65が、可動機械20の移動の案内または監視を継続しないと確定した場合(ステップ140において、No)、位置監視システム50は、図2に示すプロセスを終了することができる。
【0021】
図3は、図2に示すステップ120における慣性航法モードの例示的な動作プロセスを概略的に示す。例示的な慣性航法モードを、GPS信号が受信できない時に実行することができる。コントローラ65は、たとえば、メモリ等のデータ記憶装置から、先に保存されたGPS位置信号を検索することができる(ステップ210)。一実施形態では、保存されたGPS位置信号は、GPS信号が受信できないことを検出する前に最後に保存されたGPS位置信号を含むことができる。別法として、いくつかの実施形態では、保存されたGPS位置信号は、GPS信号が受信できないことを検出する前の複数の保存されたGPS位置信号を含むことができる。ステップ220において、可動機械20の移動に関連するパラメータを、慣性航法装置60の慣性センサによって測定することができる。移動信号を、測定された移動パラメータに基づいて慣性センサによって生成することができる(ステップ230)。たとえば、速度センサ61は、可動機械20の速度を測定し、測定された速度を示す信号を生成することができる。加速度センサ62は、可動機械20の加速度を測定し、測定された加速度を示す信号を生成することができる。操舵方向センサ63は、可動機械20の移動方向を測定し、測定された移動方向を示す信号を生成することができる。これらの信号を、慣性航法装置60から処理するためにコントローラ65に送信することができる(ステップ240)。慣性センサは、連続して、移動パラメータを測定し、測定されたパラメータを示す信号を生成することができ、または移動パラメータを測定し、所定時間間隔に従って信号を生成することができる。
【0022】
さらに図3を参照すると、ステップ250において、コントローラ65は、慣性航法装置60の慣性センサによって生成された移動信号と、GPS信号が受信できないことを検出した後に受信機55によって受信された、最後に保存されたGPS位置信号等、検索された保存GPS位置信号とに基づき、位置データを計算することができる。計算された位置データは、可動機械20の現在位置、および/または推定された移動方向、速度、加速度等、可動機械20の移動に関連する任意の好適なパラメータを含むことができる。計算された位置データを、可動機械20の移動を案内するために提供することができる(ステップ260)。たとえば、コントローラ65は、計算された位置データを、有線通信手段または無線通信手段を介して可動機械20のオペレータに、または通信装置70を介して中央制御ステーション30に位置する遠隔オペレータに提供することができる。
【0023】
位置監視システム50は、ステップ260を完了した後、または別法としてステップ260を完了する前の任意の好適な時点で、GPS信号が受信可能であるか否かを監視することができる。位置監視システム50は、GPS信号が受信可能であるか否かを確定することができる(ステップ270)。GPS信号が依然として受信できない場合(ステップ270において、No)、位置監視システム50は、ステップ220〜270を実行することにより、慣性航法装置60を利用して可動機械20に対する位置データを提供し続けることができる。GPS信号が受信できない状況においてステップ220〜270が繰り返される場合、位置データの計算は、先に計算された位置データ、GPS信号が受信できないことを検出する前に保存された、検索されたGPS信号、および慣性センサによって目下測定された移動パラメータのうちの少なくとも1つに基づくことができる。GPS信号が受信可能となると(ステップ270において、Yes)、位置監視システム50は、図2のステップ130に示すGPS航法モードに進むことができ(ステップ280)、図3に示す慣性航法モードを終了することができる。
【0024】
図4は、図2のステップ130に示す例示的なGPS航法モードを概略的に示す。この例示的なGPS航法モードでは、受信機55は、GPS衛星40からGPS位置データを受信することができる(ステップ300)。受信機55は、受信されたGPS位置データに基づいてGPS位置信号を生成することができる(ステップ310)。GPS位置信号を、受信機55からコントローラ65に送信することができる。コントローラ65は、受信機55から送信されたGPS位置信号を受信し、自己診断が実行されるべきか否かを確定することができる(ステップ315)。コントローラ65は、自己診断が実行されるべきではないと確定した場合(ステップ315において、No)、受信されたGPS位置信号を処理し、受信されたGPS位置信号を保存する。一実施形態では、コントローラ65は、受信されたGPS位置信号を、最後に受信されたGPS信号として保存することができる(ステップ320)。自己診断を実行するべきか否かを確定するために、コントローラ65は、可動機械20のオペレータから、または中央制御ステーション30のオペレータから入力を受け取ることができることが企図される。自己診断が実行されるべきでない場合(ステップ315において、No)、GPS位置信号を、たとえば中央制御ステーション30にさらに提供することができ、または可動機械20の移動を案内するためにコントローラ65によってさらに処理することができる(ステップ325)。ステップ320の前にステップ325を実行することができることが企図される。図4に示す実施形態では、ステップ325が完了した後、GPS航法モードを終了することができる。GPS航法モードが終了した後、位置監視システム50は、図1に示すステップ140を実行することができる。
【0025】
さらに図4を参照すると、コントローラ65は、自己診断が実行されるべきであると確定した場合(ステップ315において、Yes)、受信されたGPS位置信号に基づいてパラメータCの第1値を計算することができる(ステップ330)。パラメータCは、受信されたGPS位置信号と慣性センサによって生成された移動信号とに基づいて計算することができる任意の好適なパラメータであり得る。たとえば、パラメータCは、可動機械20の現在位置、または可動機械20の移動の速度、加速度および/または操舵方向であってもよい。
【0026】
慣性航法装置60は、1つまたは複数の慣性センサによって、可動機械20の移動に関連するパラメータを測定することができる(ステップ335)。たとえば、速度センサ61は、可動機械20の速度を測定することができ、加速度センサ62は、可動機械20の加速度を測定することができ、操舵方向センサ63は、可動機械20の操舵方向または移動方向を測定することができる。慣性航法装置60は、測定された移動パラメータを示す移動信号を生成することができ、移動信号をコントローラ65に送信することができる(ステップ340)。コントローラ65は、慣性航法装置60によって生成された移動信号を受信しかつ処理することができる。コントローラ65は、受信された移動信号に基づいて同じパラメータCの第2値を計算することができる(ステップ345)。別法として、いくつかの実施形態では、慣性航法装置60は、慣性センサによって生成された移動信号を処理し、同じパラメータCの第2値を計算するように構成されたプロセッサを含むことができる。プロセッサによって計算された同じパラメータCの第2値を、ステップ330においてGPS信号に基づいて計算された同じパラメータCの第1値と比較するためにコントローラ65に送信することができる。
【0027】
GPS位置信号に基づいて同じパラメータCの第1値を計算し(ステップ300)、移動信号に基づいて第2値を計算した(ステップ345)後、コントローラ65は、同じパラメータCの第1値と第2値との差を計算することができる(ステップ350)。コントローラ65は、差が所定閾値を超えるか否かを確定することができる(ステップ355)。たとえば、コントローラ65は、それぞれGPS位置信号に基づいて計算された可動機械20の位置と移動信号に基づいて計算された可動機械20の位置との差が、所定閾値を超えるか否かを確定することができる。その差が所定閾値を上回る場合(ステップ355において、Yes)、それは、たとえばGPS受信機55および慣性航法装置60のうちの一方の誤動作を示す場合があり、コントローラ65は、自己診断が継続され繰り返されるべきであるか否かを確定することができる。コントローラ65、可動機械20のオペレータ、または中央制御ステーション30のオペレータが、自己診断を継続するように確定した場合、ステップ330〜355を繰り返すことができる。自己診断が継続されるべきでないと確定された場合(ステップ365において、No)、コントローラ65は、警報信号を生成することができ(ステップ370)、警報信号を、通信装置70を介して中央制御ステーション30に送信することができる(ステップ375)。警報信号が中央制御ステーション30に送信された後、GPS航法モードを終了することができる。警報信号は、GPS受信機55または慣性航法装置60のうちの少なくとも一方が正常に機能していない可能性があり、さらなる診断、修理または交換が必要である可能性があることを示すことができる。
【0028】
ステップ355を参照すると、同じパラメータCの第1値と第2値との差が所定閾値を超えない場合(ステップ355において、No)、コントローラ65は、受信されたGPS位置信号を、たとえば、メモリ等の記憶装置に保存することができる(ステップ360)。一実施形態では、コントローラ65は、受信されたGPS位置信号を最後に受信されたGPS信号として保存することができる。受信されたGPS位置信号を、可動機械20の移動を案内するために提供することができる(ステップ325)。たとえば、受信されたGPS位置信号を、通信装置70を介して中央制御ステーション30に送信することができ、または可動機械20に搭載されているディスプレイに表示することができる。ステップ325が完了した後、GPS航法モードを終了することができる。
【0029】
いくつかの実施形態では、可動機械20の位置を監視するために、GPS45、慣性航法装置60および地上ベース測位システム75のすべてを合わせて採用することができる。たとえば、中央制御ステーション30またはコントローラ65は、GPS45、慣性航法装置60および地上ベース測位システム75の各々によって生成される位置データを受信することができ、受信された位置データに基づいて、1つまたは複数のシステムが正常に動作していないか否かを診断することができる。コントローラ65は、地上ベース測位システム75によって生成される位置データに基づいて同じパラメータCの第3値を計算することができる。コントローラ65は、GPS45、慣性航法装置60および地上ベース測位システム75のすべてによって提供される位置データを用いて、自己診断が行われるべきか否かを確定することができる。自己診断を、第1値、第2値および第3値に基づいて行うことができる。コントローラ65は、同じパラメータCの第1値、第2値および第3値を比較し、第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの間との差が所定閾値を超えるか否かを確定することができる。たとえば、第2値および第3値が互いに近い場合、かつ第1値と第2値および第3値との差が所定閾値を超える場合、コントローラ65は、第1値が間違っているかまたは無効である可能性があると確定することができる。これは、GPS45が正常に動作していない可能性があり、受信機55によって提供される位置データが、可動機械20の移動を監視し案内するために信頼できない可能性があることを示すことができる。こうした状況では、GPS信号が、たとえばGPS信号が受信できないために無効である場合、慣性航法装置60および地上ベース測位システム75のうちの少なくとも一方が、可動機械20の移動を監視し案内するために位置データを提供することができる。一方で、同じパラメータCの第1値、第2値および第3値間の差が所定閾値内である場合、それは、GPS45、慣性航法装置60および地上ベース測位システム75のすべてが正常に動作しており、GPSシステム45、慣性航法装置60および地上ベース測位システム75の各々によって提供される位置データを、可動機械20の移動を案内するために用いることができることを示すことができる。コントローラ65は、自己診断が行われた後、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えないと確定した後、受信されたGPS位置信号を最後のGPS位置信号として保存することができる。これにより、可動機械20を案内するために提供される位置データの正確さを確実にすることができる。
【0030】
開示した位置監視システムを、任意の可動機械においてその可動機械の位置を監視しかつ/または移動を案内するために採用することができる。慣性航法装置および地上ベース測位システムのうちの少なくとも一方が、GPS位置信号が受信できない時に可動機械の移動を案内するための位置データを提供することができる。GPS位置信号が受信可能である場合、慣性航法装置および地上ベース測位システムのうちの少なくとも一方を使用して、GPS信号が有効であるか否かを検証することができる。自動自己診断を定期的に実行することにより、慣性航法装置および地上ベース測位システムのうちの少なくとも一方によって提供されるGPS信号および/または他の測位信号の有効性を確実にすることができる。一方で、自己診断はまた、任意の測位システムが適切に機能していないか否かを示すことも可能である。開示した位置測定システムは、可動機械20の位置監視の信頼性および品質を向上させることができる。
【0031】
当業者には、開示した位置測定システムにおいてさまざまな変更および変形を行うことができることが明らかとなろう。本明細書における開示した実施形態の仕様および実施を考慮することにより、当業者には他の実施形態が明らかとなろう。仕様および例は、単に例示するものとして考慮され、本開示の真の範囲は以下の特許請求の範囲によって示されていることが意図されている。
【特許請求の範囲】
【請求項1】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備するシステム。
【請求項2】
センサが、可動機械の速度を測定するように構成された速度センサ(61)、可動機械の加速度を測定するように構成された加速度センサ(62)、および可動機械の移動方向を測定するように構成された方向センサ(63)のうちの少なくとも1つを有する、請求項1に記載のシステム。
【請求項3】
コントローラが、位置信号から確定されたパラメータと移動信号から確定された同じパラメータとの差が、所定閾値を超えないことを確定した後、位置信号を保存するように構成される、請求項1に記載のシステム。
【請求項4】
コントローラが、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成される、請求項1に記載のシステム。
【請求項5】
コントローラが、測位衛星から受信された位置信号を、測位衛星から受信された最後の位置信号として保存し、受信された移動信号と位置信号が受信できないことが検出される前に受信された最後の位置信号とに基づき、位置パラメータを計算するようにさらに構成される、請求項1に記載のシステム。
【請求項6】
位置監視システムが、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システム(75)をさらに有し、コントローラが、
同じパラメータの第3値を計算し、
同じパラメータの第1値、第2値および第3値を比較し、
第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定する
ようにさらに構成される、請求項1に記載のシステム。
【請求項7】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備し、
位置監視システムが、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システム(75)をさらに有し、コントローラが、
同じパラメータの第3値を計算し、
同じパラメータの第1値、第2値および第3値を比較し、
第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定する
ようにさらに構成され、
コントローラが、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成される、システム。
【請求項8】
コントローラが、受信された移動信号と、位置信号が受信できないことを検出する前に受信された保存された最後の位置信号とに基づき、位置パラメータを計算するようにさらに構成される、請求項7に記載のシステム。
【請求項9】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備し、
コントローラが、
測位衛星から受信された位置データに基づいて生成された位置信号の受信可能性に基づいて、第1航法モードまたは第2航法モードを選択し、
自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存する
ようにさらに構成される、システム。
【請求項10】
センサが、可動機械の速度を測定するように構成された速度センサ(61)、可動機械の加速度を測定するように構成された加速度センサ(62)、および可動機械の移動方向を測定するように構成された方向センサ(63)のうちの少なくとも1つを有する、請求項9に記載のシステム。
【請求項1】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備するシステム。
【請求項2】
センサが、可動機械の速度を測定するように構成された速度センサ(61)、可動機械の加速度を測定するように構成された加速度センサ(62)、および可動機械の移動方向を測定するように構成された方向センサ(63)のうちの少なくとも1つを有する、請求項1に記載のシステム。
【請求項3】
コントローラが、位置信号から確定されたパラメータと移動信号から確定された同じパラメータとの差が、所定閾値を超えないことを確定した後、位置信号を保存するように構成される、請求項1に記載のシステム。
【請求項4】
コントローラが、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成される、請求項1に記載のシステム。
【請求項5】
コントローラが、測位衛星から受信された位置信号を、測位衛星から受信された最後の位置信号として保存し、受信された移動信号と位置信号が受信できないことが検出される前に受信された最後の位置信号とに基づき、位置パラメータを計算するようにさらに構成される、請求項1に記載のシステム。
【請求項6】
位置監視システムが、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システム(75)をさらに有し、コントローラが、
同じパラメータの第3値を計算し、
同じパラメータの第1値、第2値および第3値を比較し、
第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定する
ようにさらに構成される、請求項1に記載のシステム。
【請求項7】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備し、
位置監視システムが、可動機械の移動に関連する位置データを提供するように構成された地上ベース測位システム(75)をさらに有し、コントローラが、
同じパラメータの第3値を計算し、
同じパラメータの第1値、第2値および第3値を比較し、
第1値、第2値および第3値のうちの任意の1つと、第1値、第2値および第3値のうちの残りの2つとの差が、所定閾値を超えるか否かを確定する
ようにさらに構成され、
コントローラが、自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ第1値、第2値および第3値のうちの任意の1つと第1値、第2値および第3値のうちの残りの2つとの差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存するようにさらに構成される、システム。
【請求項8】
コントローラが、受信された移動信号と、位置信号が受信できないことを検出する前に受信された保存された最後の位置信号とに基づき、位置パラメータを計算するようにさらに構成される、請求項7に記載のシステム。
【請求項9】
システム(10)であって、
可動機械(20)であって、通信装置(70)と可動機械に関連付けられた位置監視システム(50)とを有し、位置監視システムが、
測位衛星(40)から位置データを受信するとともに、受信された位置データに基づいて位置信号を生成するように構成され、可動機械に搭載されている受信機(55)と、
センサ(61、62、63)を有し、可動機械の移動に関連するパラメータを測定するとともに、測定されたパラメータに基づいて移動信号を生成するように構成され、可動機械に搭載されている慣性航法装置(60)と、
受信機および慣性航法装置に関連付けられたコントローラ(65)であって、
位置信号が受信可能である場合に位置信号を受信し、
移動信号を受信し、
位置信号が受信できないことを検出し、
受信された移動信号と、位置信号が受信できないことを検出する前に受信された位置信号とに基づいて、可動機械に対する位置パラメータを計算し、
位置信号から確定されたパラメータの第1値と移動信号から確定された同じパラメータの第2値との差が所定閾値を超えるか否かを確定し、
差が所定閾値を超えると確定した後に警報信号を生成する
ように構成されたコントローラ(65)と、
を有する、可動機械(20)と、
中央制御ステーション(30)であって、
通信装置を介してコントローラと通信し、
通信装置を介して位置信号および/または移動信号を受信し、
可動機械の位置を監視する
ように構成された中央制御ステーション(30)と、
を具備し、
コントローラが、
測位衛星から受信された位置データに基づいて生成された位置信号の受信可能性に基づいて、第1航法モードまたは第2航法モードを選択し、
自己診断が行われるべきか否かを確定するとともに、自己診断が行われた後に、かつ差が所定閾値を超えていないことを確定した後に、受信された位置信号を最後の位置信号として保存する
ようにさらに構成される、システム。
【請求項10】
センサが、可動機械の速度を測定するように構成された速度センサ(61)、可動機械の加速度を測定するように構成された加速度センサ(62)、および可動機械の移動方向を測定するように構成された方向センサ(63)のうちの少なくとも1つを有する、請求項9に記載のシステム。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2012−525587(P2012−525587A)
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2012−508500(P2012−508500)
【出願日】平成22年3月29日(2010.3.29)
【国際出願番号】PCT/US2010/029009
【国際公開番号】WO2010/129111
【国際公開日】平成22年11月11日(2010.11.11)
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【国際出願番号】PCT/US2010/029009
【国際公開番号】WO2010/129111
【国際公開日】平成22年11月11日(2010.11.11)
【出願人】(391020193)キャタピラー インコーポレイテッド (296)
【氏名又は名称原語表記】CATERPILLAR INCORPORATED
【Fターム(参考)】
[ Back to top ]