
可動部駆動装置及び可動部駆動方法
【課題】複数の可動部を全体として複雑な動きで動かす。
【解決手段】マイクにより外部の音楽を集音して音楽データを生成し、生成した音楽データから音楽の複数の周波数帯域毎のデータ成分を抽出して、かかるデータ成分から音楽の複数の周波数帯域毎の部分音量レベルを検出すると共に、検出した複数の周波数帯域毎の部分音量レベルに基づいて回転楕円体状筐体に設けられた6個の可動部のそれぞれを駆動制御するようにしたことにより、6個の可動部のそれぞれを、複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る。
【解決手段】マイクにより外部の音楽を集音して音楽データを生成し、生成した音楽データから音楽の複数の周波数帯域毎のデータ成分を抽出して、かかるデータ成分から音楽の複数の周波数帯域毎の部分音量レベルを検出すると共に、検出した複数の周波数帯域毎の部分音量レベルに基づいて回転楕円体状筐体に設けられた6個の可動部のそれぞれを駆動制御するようにしたことにより、6個の可動部のそれぞれを、複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は可動部駆動装置及び可動部駆動方法に関し、例えば音楽に合わせて動くロボット装置に適用して好適なものである。
【背景技術】
【0002】
従来のロボット装置は、外部の音楽を集音してかかる音楽の音量レベルを検出し、単位時間あたりの音量レベルの差が大きい場合には激しい音楽であると判別して、ロボット装置の腕を音量レベルに応じた速さで上下に動かしていた。また、ロボット装置は、単位時間あたりの音量レベルの差が小さい場合には静かな音楽であると判別して、ロボット装置の全体を音量レベルに応じた速さで左右に動かしていた(例えば特許文献1参照)。
【特許文献1】特開平3−123581号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが従来のロボット装置は、複数の可動部が設けられているとしても、これらを音楽の音量レベルといった1つの情報をもとに動かすようになされているので、複数の可動部のそれぞれを独立に動かして複雑な動きをすることができないという問題があった。
【0004】
本発明は以上の点を考慮してなされたもので、複数の可動部を全体として複雑な動きで動かし得る可動部駆動装置及び可動部駆動方法を実現する。
【課題を解決するための手段】
【0005】
かかる課題を解決するため本発明においては、所定の動きで可動する複数の可動部と、外部の音声を集音して音声データを生成する集音部と、音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部と、抽出部により抽出された音声の所定の複数の周波数帯域毎のデータ成分に基づいて複数の可動部のそれぞれを駆動制御する駆動制御部とを設けるようにした。
【発明の効果】
【0006】
従って本発明では、外部の音声を集音して音声データを生成し、生成した音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出すると共に、抽出したデータ成分に基づいて当該装置に設けられた複数の可動部のそれぞれを駆動制御するようにしたことにより、複数の可動部のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができる。
【0007】
本発明によれば、外部の音声を集音して音声データを生成し、生成した音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出すると共に、抽出したデータ成分に基づいて当該装置に設けられた複数の可動部のそれぞれを駆動制御するようにしたことにより、複数の可動部のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る可動部駆動装置及び可動部駆動方法を実現し得る。
【発明を実施するための最良の形態】
【0008】
以下図面について、本発明の一実施の形態を詳述する。
【0009】
(1)第1の実施の形態
(1−1)本実施の形態の概要
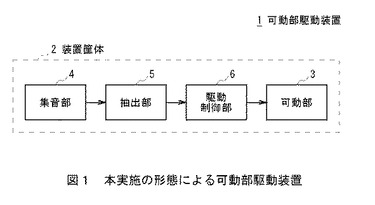
図1において、1は全体として本実施の形態による可動部駆動装置の構成の概要を示す。可動部駆動装置1は、略回転楕円体状の装置筐体2を有する。また可動部駆動装置1には、所定の動きで可動する複数の可動部3が設けられている。さらに可動部駆動装置1の集音部4は、外部の音楽を集音して音楽データを生成する。さらに可動部駆動装置1の抽出部5は、集音部4で生成した音楽データから音楽の所定の複数の周波数帯域毎のデータ成分を抽出する。さらに可動部駆動装置1の駆動制御部6は、抽出部5により抽出された音楽の所定の複数の周波数帯域毎のデータ成分に基づいて、複数の可動部3のそれぞれを駆動制御する。かかる構成により可動部駆動装置1は、複数の可動部3のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部3の動きを任意に組み合わせることができ、かくして、複数の可動部3を全体として複雑な動きで動かし得る。
【0010】
(1−2)ロボット装置の構成
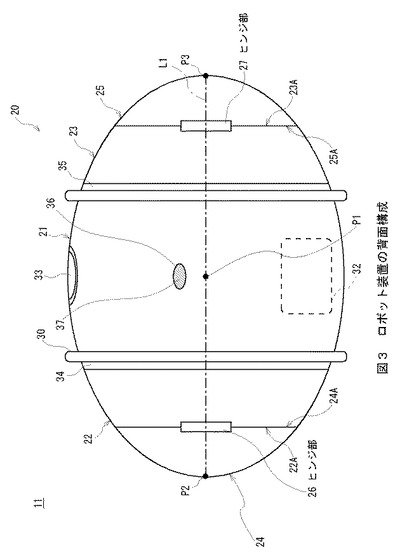
図2(A)及び(B)並びに図3において、11は全体として本発明を適用したロボット装置を示し、例えば全体として略回転楕円体状の装置筺体(以下、これを回転楕円体状筐体と呼ぶ)20を有している。かかる回転楕円体状筐体20は、その中央の略樽型形状の部分でなる筐体中央部21の互いに対向する一対の端部のうち、一方の端部(以下、これを右側端部と呼ぶ)側に略円錐台形状の部分でなる第1の筐体回動部(以下、これを筐体右側回動部と呼ぶ)22が設けられている。また回転楕円体状筐体20は、筐体中央部21の他方の端部(以下、これを左側端部と呼ぶ)側に、略円錐台形状の部分でなる第2の筐体回動部(以下、これを筐体左側回動部と呼ぶ)23が設けられている。
【0011】
さらに回転楕円体状筐体20は、筐体右側回動部22の右側に、略キャップ形状の部分でなる第1の筐体開閉部(以下、これを筺体右側開閉部と呼ぶ)24が設けられている。さらにまた回転楕円体状筐体20は、筐体左側回動部23の左側に、略キャップ形状の部分でなる第2の筐体開閉部(以下、これを筺体左側開閉部と呼ぶ)25が設けられている。
【0012】
そして回転楕円体状筐体20の中心点P1から当該回転楕円体状筐体20表面の最も遠い右側及び左側の両頂点P2、P3を直線で結ぶ線分(すなわち、回転楕円体の長軸)を水平回動軸線L1とすると、筐体右側回動部22は、筐体中央部21の右側端部に対し、当該水平回動軸線L1を中心にして軸回り一方向D1及びこれとは逆の軸回り他方向に回動可能に枢支されている。また筐体左側回動部23は、筐体中央部21の左側端部に対し、水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。
【0013】
さらに図4に示すように、筐体右側開閉部24は、筐体右側回動部22に対し、当該筐体右側回動部22の右側縁部22Aの所定位置に設けられたヒンジ部26を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体右側開閉部24は、筐体右側回動部22の右側縁部22Aに対し開口縁部24Aを当接させる位置から、右側縁部22Aと開口縁部24Aとの開き角度が略90度となる位置までの所定角度範囲内で任意の角度に開くようになされている。一方、筐体左側開閉部25は、筐体左側回動部23に対し、当該筐体左側回動部23の左側縁部23Aの所定位置に設けられたヒンジ部27を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体左側開閉部25は、筐体左側回動部23の左側縁部23Aに対し開口縁部25Aを当接させる位置から、左側縁部23Aと開口縁部25Aとの開き角度が略90度となる位置までの所定角度範囲で任意の角度に開くようになされている。
【0014】
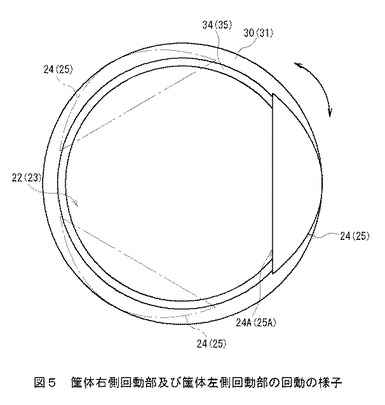
また図5に示すように、筐体右側回動部22は、筐体左側回動部23とは独立して回動し得るようになされている。そして筐体右側回動部22は、筐体右側開閉部24の開閉動作からも独立して回動し得るようになされている。また筐体左側回動部23も、筐体左側開閉部25の開閉動作から独立して回動し得るようになされている。
【0015】
これに加えて図2(A)及び(B)並びに図3に示すように、筐体中央部21の右側端部には、当該筐体中央部21の最大外径よりも大きい所定外径を有する円環形状の右側車輪30が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。また筐体中央部21の左側端部には、右側車輪30と同様形状及び同様外形の左側車輪31が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。これら右側車輪30及び左側車輪31は、それぞれが回転して回転楕円体状筐体20を自走させるためのものであり、当該右側車輪30と左側車輪31とはそれぞれ独立して回動し得るようになされている。
【0016】
そして筐体中央部21内には、内壁所定位置にバッテリ等でなる重り32が固定されている。また筐体中央部21は、回転楕円体状筐体20の中心点P1から右側端部(すなわち、右側車輪30)までの距離と、当該回転楕円体状筐体20の中心点P1から左側端部(すなわち、左側車輪31)までの距離とがほぼ等しい所定距離に選定されている。さらに筐体右側回動部22及び筐体左側回動部23は、互いに同じ形状でなり、互いの幅がほぼ等しい所定幅に選定されている。さらに筐体右側開閉部24及び筐体左側開閉部25も、互いに同じ形状でなり、それぞれ開口縁部24A及び25Aから表面の頂点P2及びP3までの幅がほぼ等しい所定長さに選定されている。すなわち回転楕円体状筐体20は、当該回転楕円体状筐体20の中心P1を通り、水平回動軸線L1を垂線とする仮想平面(図示せず)に対し左右が面対称に形成されている。
【0017】
このため回転楕円体状筐体20は、机の天板や床等(以下、これらをまとめて床と呼ぶ)に載上される場合、筐体中央部21の最大外形部分の外周面を当該床の表面から僅かに離間させ、かつ水平回動軸線L1を床の表面と並行にした姿勢で右側車輪30及び左側車輪31により支持される。これに加えて回転楕円体状筐体20は、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、床に載上された場合、当該重り32を鉛直下側に位置させた(すなわち、重り32部分でなる重心を床の表面に極力近づけた)姿勢(以下、これを基準姿勢と呼ぶ)となる。そして筐体中央部21内の重り32は、その重さが比較的重く選定されている。従って回転楕円体状筐体20は、右側車輪30及び左側車輪31によって支持された状態で床に載上された場合、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれ、また当該筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等に傾くことなく基準姿勢を維持することができる。
【0018】
また回転楕円体状筐体20は、床の上を右側車輪30及び左側車輪31の回転により自走する場合も、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、当該筐体中央部21が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回転することを抑制し得るようになされている。さらに回転楕円体状筐体20は、重り32が比較的重いため、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれ、また当該筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。
【0019】
これに加えて筐体中央部21の表面には、基準姿勢で上側となる位置に、指や手等が接触したことを検知するための接触検知センサ部33が設けられている。かかる接触検知センサ部33は、例えば、筐体中央部21の表面における指先大の領域に接触した指や手等を検知するようになされている。また右側車輪30の右側には、光を発する環状の右側発光部34が設けられている。さらに左側車輪31の左側にも、右側発光部34と同様構成の光を発する環状の左側発光部35が設けられている。そしてかかる右側発光部34及び左側発光部35は、それぞれ全体や一部分、また発光色等のように発光状態を可変して発光し得るようになされている。
【0020】
かかる構成に加えロボット装置11(図2)の場合、回転楕円体状筐体20の基準姿勢における筐体中央部21の背面で水平回動軸線L1よりも僅かに上側となる位置に、穴部36が形成されている。この穴部36内には、マイク37が収納されている。マイク37は、ロボット装置11の外部の音楽を集音し、集音した音楽に所定のアナログデジタル処理を施すことにより音楽データを生成する。
【0021】
(1−3)ロボット装置の回路構成
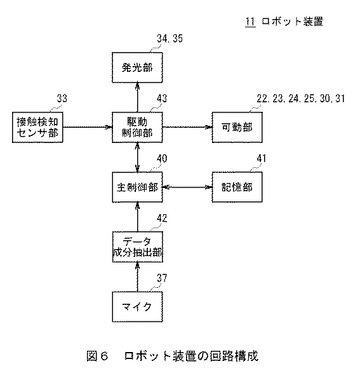
次いで図6を用いてロボット装置11の回路構成について説明する。かかるロボット装置11は、各回路が回転楕円体状筐体20内に収納されており、当該回路としてロボット装置11全体を統括的に制御する主制御部40を有している。そして主制御部40は、例えばフラッシュメモリでなる記憶部41に予め記憶している制御プログラム等の各種プログラムに従って各種処理を実行する。
【0022】
また主制御部40は、記憶部41に対し、ロボット装置11に設けられた可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを予め選定された数秒の所定時間(以下、これを動き実行時間と呼ぶ)に、所望の動きパターンで動かすための動きパターンデータを記憶している。そして動きパターンデータは、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎に複数種類用意されている。
【0023】
この場合、筐体右側回動部22や筐体左側回動部23に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該筐体右側回動部22や筐体左側回動部23に対する回転方向や回転角度、回転速度、回転方向反転回数等を示すように生成されている。そして筐体右側回動部22や筐体左側回動部23に対応する動きパターンとしては、例えば比較的遅く一方向へ回転するように動く動きパターンや、比較的速く一方向へ回転するように動く動きパターン、回転方向をすばやく何度も反転させるように動く動きパターン等がある。
【0024】
また筐体右側開閉部24や筐体左側開閉部25に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該筐体右側開閉部24や筐体左側開閉部25に対する開閉方向や開閉角度、開閉速度、開閉回数等を示すように生成されている。そして筐体右側開閉部24や筐体左側開閉部25に対応する動きパターンとしては、例えば比較的遅く開く又は閉じるように動く動きパターンや、比較的速く開く又は閉じるように動く動きパターン、開閉方向やすばやく何度も反転させるように動く動きパターン等がある。
【0025】
さらに右側車輪30や左側車輪31に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該右側車輪30や左側車輪31に対する回転方向や回転角度、回転速度、回転回数等を示すように生成されている。そして右側車輪30や左側車輪31に対応する動きパターンとしては、例えば比較的遅く一方向へ回転するように動く動きパターンや、比較的速く一方向へ回転するように動く動きパターン、回転方向をすばやく何度も反転させるように動く動きパターン等がある。
【0026】
そして主制御部40は、ロボット装置11が床等の平面上に載置された状態において、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が入れられると、右側発光部34及び左側発光部35を所定の発光パターンで発光させて起動したことをユーザに通知すると共に、音楽に合わせてロボット装置の各可動部を動かす可動部駆動処理を開始する。
【0027】
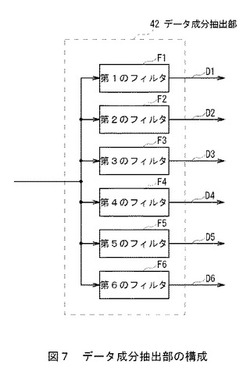
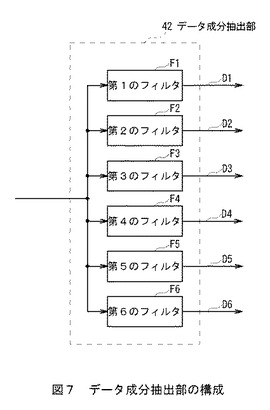
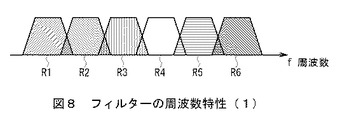
主制御部40は、かかる可動部駆動処理を開始すると、例えばオーディオプレイヤからの出力により外部に流れている音楽をマイク37により集音して音楽データを生成し、これをデータ成分抽出部42へ送出する。データ成分抽出部42は、図7に示すように、ロボット装置11の可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31(以下、これを6個の可動部とも呼ぶ)のそれぞれを駆動するために対応付けられた第1〜第6のフィルタ(F1〜F6)から構成されている。これら第1〜第6のフィルタ(F1〜F6)のそれぞれは、図8に示すように、音楽データから、周波数軸fに沿って所定の第1〜第6の周波数帯域(R1〜R6)それぞれのデータ成分を、音楽の低音域に相当する低い周波数帯域から順に抽出するようになされている。ちなみに、これら第1〜第6のフィルタ(F1〜F6)により定められている第1〜第6の周波数帯域(R1〜R6)は、隣接する周波数帯域が一部重なっている。
【0028】
そしてデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第1のフィルタF1は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第1の周波数帯域R1のデータ成分(以下、これを第1のデータ成分と呼ぶ)D1を筐体右側回動部22の駆動用に抽出して主制御部40へ送出する。主制御部40は、第1のデータ成分D1を受け取ると、かかる第1のデータ成分D1から音楽の第1の周波数帯域R1に相当する部分の音量レベル(以下、これを第1の部分音量レベルと呼ぶ)を所定時間(例えば1秒程度)毎に検出する。そして主制御部40は、検出した第1の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側回動部22に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体右側回動部22に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部22を駆動制御する。すなわち主制御部40は、音楽の中に、第1の周波数帯域R1に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体右側回動部22を所定の動きパターンで回動する。
【0029】
またデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第2のフィルタF2は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第2の周波数帯域R2のデータ成分(以下、これを第2のデータ成分と呼ぶ)D2を筐体左側回動部23の駆動用に抽出して主制御部40へ送出する。主制御部40は、第2のデータ成分D2を受け取ると、かかる第2のデータ成分D2から音楽データの第2の周波数帯域R2に相当する部分の音量レベル(以下、これを第2の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第2の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している筐体左側回動部23に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体左側回動部23に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部23を駆動制御する。すなわち主制御部40は、音楽の中に、第2の周波数帯域R2に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体左側回動部23を所定の動きパターンで回動する。
【0030】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第3のフィルタF3は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第3の周波数帯域R3のデータ成分(以下、これを第3のデータ成分と呼ぶ)D3を筐体右側開閉部24の駆動用に抽出して主制御部40へ送出する。主制御部40は、第3のデータ成分D3を受け取ると、かかる第3のデータ成分D3から音楽データの第3の周波数帯域R3に相当する部分の音量レベル(以下、これを第3の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第3の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側開閉部24に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体右側開閉部24に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部24を駆動制御する。すなわち主制御部40は、音楽の中に、第3の周波数帯域R3に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体右側開閉部24を所定の動きパターンで開閉する。
【0031】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第4のフィルタF4は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第4の周波数帯域R4のデータ成分(以下、これを第4のデータ成分と呼ぶ)D4を筐体左側開閉部25の駆動用に抽出して主制御部40へ送出する。主制御部40は、第4のデータ成分D4を受け取ると、かかる第4のデータ成分D4から音楽データの第4の周波数帯域R4に相当する部分の音量レベル(以下、これを第4の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第4の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体左側開閉部25に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体左側開閉部25に対応する動きパターンデータに応じた動きパターンで動くように筐体左側回動部25を駆動制御する。すなわち主制御部40は、音楽の中に、第4の周波数帯域R4に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体左側開閉部25を所定の動きパターンで開閉する。
【0032】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第5のフィルタF5は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第5の周波数帯域R5のデータ成分(以下、これを第5のデータ成分と呼ぶ)D5を右側車輪30の駆動用に抽出して主制御部40へ送出する。主制御部40は、第5のデータ成分D5を受け取ると、かかる第5のデータ成分D5から音楽データの第5の周波数帯域R5に相当する部分の音量レベル(以下、これを第5の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第5の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、右側車輪30に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される右側車輪30に対応する動きパターンデータに応じた動きパターンで動くように右側車輪30を駆動制御する。すなわち主制御部40は、音楽の中に、第5の周波数帯域R5に相当する音域の音が所定の音量レベル以上で含まれている場合には、右側車輪30を所定の動きパターンで回動する。
【0033】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第6のフィルタF6は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第6の周波数帯域R6のデータ成分(以下、これを第6のデータ成分と呼ぶ)D6を左側車輪31の駆動用に抽出して主制御部40へ送出する。主制御部40は、第6のデータ成分D6を受け取ると、かかる第6のデータ成分D6から音楽データの第6の周波数帯域R6に相当する部分の音量レベル(以下、これを第6の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第6の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、左側車輪31に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される左側車輪31に対応する動きパターンデータに応じた動きパターンで動くように左側車輪31を駆動制御する。すなわち主制御部40は、音楽の中に、第6の周波数帯域R6に相当する音域の音が所定の音量レベル以上で含まれている場合には、左側車輪31を所定の動きパターンで回動する。
【0034】
そして主制御部40は、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が切断されると、かかる可動部駆動処理を終了する。
【0035】
このようにして主制御部40は、可動部駆動処理時、外部に流れている音楽の第1〜第6の周波数帯域(R1〜R6)のそれぞれに相当する部分の第1〜第6の部分音量レベル(以下、これらを単に音楽の周波数帯域毎の部分音量レベルとも呼ぶ)に応じて、6個の可動部のそれぞれを同時並行的に独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができる。すなわちロボット装置11は、可動部駆動処理時、外部に流れている音楽に合わせて6個の可動部のそれぞれを種々の組み合わせで動かすことができ、あたかもロボット装置11自体が音楽に合わせて複雑な踊りを踊っているかのように見せることができる。
【0036】
また主制御部40は、可動部駆動処理時、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に動かすことにより、音楽の各周波数帯域に相当する音域の音に合わせるようにして6個の可動部の動きの有無を組み合わせて動かすことができる。すなわちロボット装置11は、音楽毎に異なる主旋律や対旋律、コード等に対応する周波数帯域の音量レベルに合わせるようにして、6個の可動部の動きの有無を組み合わせて動かすことができ、あたかも音楽の違いを認識して音楽毎に異なる動きで踊りを踊っているかのように見せることができる。
【0037】
さらに主制御部40は、可動部駆動処理時、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じてロボット装置11の6個の可動部のそれぞれの動きパターンデータを記憶部41から読み出すとき、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの中から、それぞれ1つの動きパターンデータをランダムに読み出していることにより、ロボット装置11の6個の可動部のそれぞれに対して1種類の動きパターンデータしか用意されていない場合に比して、ロボット装置11の6個の可動部を全体として多くの動きパターンの組み合わせで動かすことができる。すなわちロボット装置11は、同じような動きばかりしてユーザに動きを飽きさせること無く、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの組み合わせの分だけロボット装置11全体として異なる動きで動くことができ、それだけエンターテイメント性を高めることができる。
【0038】
ちなみに、主制御部40は、可動部駆動処理時、周波数帯域毎の部分音量レベルが所定の閾値を越えたことに応じて、6個の可動部のうち対応する可動部を動きパターンデータに応じた動きパターンで動かすとき、かかる動きパターンによる動きが完了するまでの間に(すなわち、動きを開始してから動き実行時間が経過するまでの間に)、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を再び越えたことを検出した場合でも、現時点で実行中の動きパターンの動きを継続するようになされている。
【0039】
(1−4)可動部駆動処理手順
ここで、上述した可動部駆動処理の手順について説明する。ロボット装置11は、ロボット装置11が床等の平面上に載置された状態で、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が入れられると、図11に示すような可動部駆動処理手順RT1を開始する。ロボット装置11の主制御部40は、かかる可動部駆動処理手順RT1を開始すると、ステップSP1において、例えばオーディオプレイヤによりロボット装置11の外部に流れている音楽をマイク37により集音して音楽データを生成し、次のステップSP2に移る。
【0040】
ステップSP2において主制御部40は、音楽データから、周波数軸fに沿って所定の第1〜第6の周波数帯域(R1〜R6)それぞれに対応する、第1〜第6のデータ成分(D1〜D6)を抽出し、次のステップSP3に移る。
【0041】
ステップSP3において主制御部40は、抽出した第1〜第6のデータ成分(D1〜D6)から、音楽の周波数帯域毎の部分音量レベルを所定時間毎に検出し、次のステップSP4に移る。
【0042】
ステップSP4において主制御部40は、検出した音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に駆動制御し、次のステップSP5に移る。
【0043】
ステップSP5において主制御部40は、接触検知センサ部33に指や手等が接触したか否かを判別する。このステップSP5において否定結果が得られると、このことは、未だユーザによりロボット装置11の主電源が切断されていないことを示している。従って主制御部40は、このときステップSP1に戻り、かかるステップSP5で肯定結果が得られるまで上述したステップSP1〜ステップSP5の手順を繰り返す。
【0044】
これに対しステップSP5において肯定結果が得られると、このことは、ユーザによりこの可動部駆動処理手順RT1が終了されてロボット装置11の主電源を切断する操作がなされたことを示している。従って制御部40は、次のステップSP6に移り、かかる可動部駆動処理手順RT1を終了する。
【0045】
このような可動部駆動処理手順RT1により、主制御部40は、音楽に合わせて6個の可動部を独立に動かすようになされている。
【0046】
(1−5)ビート検出
かかる構成に加えて、ロボット装置11は、可動部駆動処理時、外部に流れている音楽のビートを検出する機能を有している。
【0047】
すなわちロボット装置11の主制御部40は、可動部駆動処理時、マイク37から送出される音楽データから周波数帯域毎の部分音量レベルを検出したとき、かかる周波数帯域毎の部分音量レベルのうち、音楽の中の低音(すなわち、ドラムやベースといった打楽器によって放音される、音楽の基音を含む音域の音)に相当する周波数帯域の部分音量レベルのエンベロープ波形からピークの位置を検出することにより、流れている音楽のビートを検出し、この検出したビートを駆動制御部43に送出する。そして駆動制御部43は、主制御部40から6個の可動部それぞれに対応する動きパターンデータが送出されると、音楽のビートに合わせて動きを開始する。つまり駆動制御部43は、例えば主制御部40から筐体右側回動部22に対応する動きパターンデータが送出された場合に、音楽のビートに同期して筐体右側回動部22の動きが開始するように駆動制御する。また、一般に1曲の音楽の中でビートの周期はほぼ一定であるので、駆動制御部43は、検出されたビートの次に到来するビート(すなわち、検出されたビートの次に検出するであろうビート)のタイミングも予想することができ、次のビートに同期して各可動部の動きが完了するようにも制御する。これにより駆動制御部43は、例えば筐体右側開閉部24が閉じた状態において、筐体右側開閉部24が開く動作を開始してからビートの検出に合わせてこの筐体右側開閉部24が開く動作を完了することもできる。
【0048】
このようにして主制御部40は、可動部駆動処理時、音楽のビートに同期して6個の可動部のそれぞれの動きを開始または完了し、例えば、音楽の中でビートにより区切られてなる小節の切り換わりに合わせて6個の可動部のそれぞれの動きを開始または完了することができ、単に周波数帯域毎の部分音量レベルに応じて6個の可動部のそれぞれを駆動制御する場合に比して、音楽の曲調に合った動きをすることができる。
【0049】
(1−6)テンポ検出
また、これに加えロボット装置11は、可動部駆動処理時、音楽のビートに応じて音楽のテンポを検出する機能を有している。
【0050】
すなわちロボット装置11の主制御部40は、可動部駆動処理時、周波数帯域毎の部分音量レベルのピークから音楽のビートを検出したとき、かかるビートの検出周期を計時することにより、流れている音楽のテンポを検出する。そして主制御部40は、音楽のテンポに応じて、6個の可動部のそれぞれの動きパターンデータに設定されている動き実行時間を変更するための、音楽のテンポに応じた倍率(以下、これをテンポ倍率と呼ぶ)を算出する。このテンポ倍率は、例えば、BPM(Beat Per Minute)120のテンポ(すなわち1分間に120のビートが刻まれるテンポ)を基準として、BPM180のテンポが与えられた場合に、「180/120=1.5」のようにして算出されるものであり、基準のテンポよりも速ければ1よりも大きく、基準のテンポよりも遅ければ1よりも小さくなるようになされている。
【0051】
主制御部40は、可動部駆動処理時、音楽のテンポからテンポ倍率を算出すると、駆動部に送出している6個の可動部の動きパターンデータの動き実行時間をテンポ倍率で除算するようにして動きパターンデータを修正する。すなわち主制御部40は、テンポ倍率(この場合1.5)を算出したときに、例えば3秒の動き実行時間の間に筐体右側回動部22を一方向に3回転させる動きパターンデータが与えられた場合、「3秒/1.5=2秒」の動き実行時間の間に筐体右側回動部22を一方向に3回転させるように動きパターンデータを修正し、この修正した動きパターンデータを駆動制御部43に送出する。そして駆動制御部43は、主制御部40から送出された、修正された動きパターンデータに応じて筐体右側回動部22を駆動制御する。ちなみに6個の可動部の他の可動部についても同様である。
【0052】
このようにして主制御部40は、可動部駆動処理時、6個の可動部を駆動制御するとき、音楽のテンポが速ければ6個の可動部のそれぞれの動きを速くすると共に、音楽のテンポが遅ければ6個の可動部のそれぞれの動きを遅くすることができ、あたかもロボット装置11自体が音楽のテンポに同期した動きで踊っているかのように見せることができる。
【0053】
(1−7)第1の実施の形態の動作及び効果
以上の構成においてロボット装置11の主制御部40は、可動部駆動処理時、外部の音楽をマイク37により集音して音楽データを生成し、この音楽データから周波数帯域毎の部分音量レベルを検出する。そして主制御部40は、検出した第1乃至第6の周波数帯域毎の部分音量レベルのそれぞれに応じて、6個の可動部のそれぞれを駆動制御するようにした。
【0054】
従って主制御部40は、6個の可動部のそれぞれを、音楽の複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、ロボット装置11の6個の可動部を全体として複雑な動きで動かすことができる。
【0055】
以上の構成によれば、ロボット装置11は、マイク37により外部の音楽を集音して音楽データを生成し、生成した音楽データから音楽の周波数帯域毎のデータ成分を抽出して、かかるデータ成分から音楽の複数の周波数帯域毎の部分音量レベルを検出すると共に、検出した複数の周波数帯域毎の部分音量レベルに基づいて回転楕円体状筐体20に設けられた6個の可動部のそれぞれを駆動制御するようにしたことにより、6個の可動部のそれぞれを、複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る。
【0056】
またロボット装置11は、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に動かすようにした。これによりロボット装置11は、音楽の各周波数帯域に相当する音域の音に合わせるようにして6個の可動部の動きを組み合わせて動かすことができる。すなわちロボット装置11は、音楽毎に異なる主旋律や対旋律、コード等に対応する周波数帯域の音量レベルに合わせるようにして6個の可動部の動きを組み合わせて動かすことができ、かくして、あたかもロボット装置11自体が音楽の違いを認識して音楽毎に異なる動きで踊りを踊っているかのように見せることができる。
【0057】
さらにロボット装置11は、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じてロボット装置11の6個の可動部のそれぞれの動きパターンデータを記憶部41から読み出すとき、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの中から、それぞれ1つの動きパターンデータをランダムに読み出すようにした。これによりロボット装置11は、6個の可動部のそれぞれに対して1種類の動きパターンデータしか用意されていない場合に比して、6個の可動部を全体として多くの動きパターンの組み合わせで動かすことができる。すなわちロボット装置11は、例えば同じような動きばかりしてユーザに動きを飽きさせること無く、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの組み合わせの分だけロボット装置11全体として異なる動きで動くことができ、かくして、エンターテイメント性を高めることができる。
【0058】
さらにロボット装置11は、音楽のビートを検出すると共に、この音楽のビートに同期するようにして、6個の可動部のそれぞれの動きパターンデータに応じた動きパターンの動きを開始するようにした。これによりロボット装置11は、例えば、音楽の中でビートにより区切られてなる小節の切り換わりに合わせて6個の可動部のそれぞれの動きを開始または完了することができ、単に周波数帯域毎の部分音量レベルに応じて6個の可動部のそれぞれを駆動制御する場合に比して、音楽の曲調に合った動きをすることができる。
【0059】
さらにロボット装置11は、音楽のテンポを検出してかかるテンポに応じたテンポ倍率を算出し、このテンポ倍率に応じて6個の可動部のそれぞれの動きパターンデータの動き実行時間を修正してから、修正した動きパターンデータに応じて6個の可動部のそれぞれを動かすようにした。これによりロボット装置11は、音楽のテンポが速ければ6個の可動部のそれぞれの動きを速くすると共に、音楽のテンポが遅ければ6個の可動部のそれぞれの動きを遅くすることができ、かくして、あたかもロボット装置11自体が音楽のテンポに同期した動きで踊っているかのように見せることができる。
【0060】
(2)第2の実施の形態
第2の実施の形態の場合、ロボット装置の構成及びロボット装置の回路構成は上述の第1の実施の形態と同様であり、データ成分抽出部42において、6個の可動部のそれぞれに対応付けられたフィルタの個数や、かかるフィルタに対応する周波数帯域の幅が異なる点が相違する。
【0061】
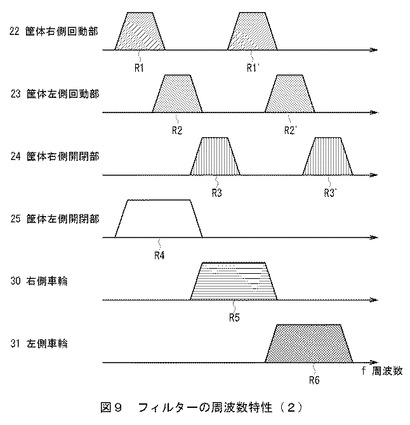
この第2の実施の形態の場合のロボット装置11は、図9に示すように、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側回動部22に対応付けられた第1のフィルタF1が、音楽データの低周波数帯域側の第1の周波数帯域R1と高周波数帯域側の第1の周波数帯域R1’のデータ成分の抽出用とに2個設けられている。またロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体左側回動部23に対応付けられた第2のフィルタF2が、音楽データの低周波数帯域側の第2の周波数帯域R2と高周波数帯域側の第2の周波数帯域R2’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側開閉部24に対応付けられた第3のフィルタF3が、音楽データの低周波数帯域側の第3の周波数帯域R3と高周波数帯域側の第3の周波数帯域R3’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体左側開閉部25に対応付けられた第4のフィルタF4と、右側車輪30に対応付けられた第5のフィルタF5と、左側車輪31に対応付けられた第6のフィルタF6とが、第1〜第3のフィルタ(F1〜F3)よりも長い幅の周波数帯域のデータ成分を抽出するようになっている。
【0062】
これにより主制御部40は、上述の第1の実施の形態の可動部駆動処理時と同様にして、音楽データから抽出した第1の周波数帯域R1の第1のデータ成分D1から第1の部分音量レベルを検出すると共に、音楽データから抽出した第1の周波数帯域R1’の第1のデータ成分D1’の第1の部分音量レベルを検出し、検出した第1の部分音量レベルD1及び第1の部分音量レベルD1’が所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側回動部22に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して、これに応じて筐体右側回動部22を所定の動きパターンで回動する。
【0063】
このとき、第1の周波数帯域R1のデータ成分D1の第1の部分音量レベルに応じて記憶部41から読み出す動きパターンと、第1の周波数帯域R1’のデータ成分D1’の第1の部分音量レベルに応じて記憶部41から読み出す動きパターンとが異なるようにすることで、主制御部40は、例えば低音側の第1の周波数帯域R1のデータ成分D1の第1の部分音量レベルに応じて当該筐体右側回動部22を一方向に回転させ、その一方で高音側の第1の周波数帯域R1’のデータ成分D1’の第1の部分音量レベルに応じて当該筐体右側回動部22を一方向とは逆方向に回転させることができる。また、第2のフィルタF2に対する筐体左側回動部23及び第3のフィルタF3に対する筐体右側開閉部24についても、同様である。
【0064】
このようにしてロボット装置11は、可動部に対して複数のフィルタを設けることにより、同じ可動部に対して、音楽の音域に応じた異なる動きを割り当てることができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0065】
またロボット装置11は、6個の可動部に対応する複数の周波数帯域(すなわち、図9の第1の周波数帯域R1、第1の周波数帯域R1’、第2の周波数帯域R2、第2の周波数帯域R2’、第3の周波数帯域R3、第3の周波数帯域R3’、第4の周波数帯域R4、第5の周波数帯域R5及び第6の周波数帯域R6)の中の例えば第1の周波数帯域R1と第4の周波数帯域R4とのように、異なる可動部の駆動用に同じ周波数帯域を含む周波数帯域のデータ成分を抽出するようにフィルタを設けるようにすることで、音楽の中に、かかる同じ周波数帯域に相当する音域の音が所定の音量レベル以上で含まれていることに応じて、異なる可動部(この場合筐体右側回動部22及び筐体左側開閉部25)を独立に動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0066】
さらにロボット装置11は、第4〜第6のフィルタ(F4〜F6)に対応する周波数帯域の幅が、第1〜第3のフィルタ(F1〜F3)に対応する周波数帯域の幅よりも長くなるようにしたことにより、全てのフィルタに同じ幅でなる周波数帯域を適用するようにした場合に比して、ロボット装置11の6個の可動部を様々な周波数帯域に対応する音量レベルに応じてそれぞれ動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0067】
さらにロボット装置11は、6個の可動部に対応する複数の周波数帯域(すなわち、図9の第1の周波数帯域R1、第1の周波数帯域R1’、第2の周波数帯域R2、第2の周波数帯域R2’、第3の周波数帯域R3、第3の周波数帯域R3’、第4の周波数帯域R4、第5の周波数帯域R5及び第6の周波数帯域R6)の中の、例えば第1の周波数帯域R1と第4の周波数帯域R4とのように、異なる幅でなる周波数帯域を抽出するフィルタを各可動の駆動用に設けるようにすることで、音楽が与えられたときに、フィルタの周波数帯域の幅に応じて各可動部の動く頻度が可動部毎に異なるようにすることができ、例えば、6個の可動部の中の右側車輪30及び左側車輪31を動かす頻度を上げてロボット装置11が始終走り回っているようにすることもできるし、6個の可動部の中の右側車輪30を動かす頻度だけを上げてロボット装置11が全体として左側に旋回するような方向に走るように設定して机の上から落ち難くするようにもできる。すなわちロボット装置11は、予め各フィルタと各可動部の組み合わせを設定しておくことで、音楽に合わせてユーザの所望するような動きで動くことができる。
【0068】
(3)第3の実施の形態
第3の実施の形態の場合、ロボット装置の構成及びロボット装置の回路構成は上述の第1の実施の形態と同様であり、データ成分抽出部42において、6個の可動部のそれぞれに対応付けられたフィルタの個数や、かかるフィルタに対応する周波数帯域の幅が異なる点が相違する。
【0069】
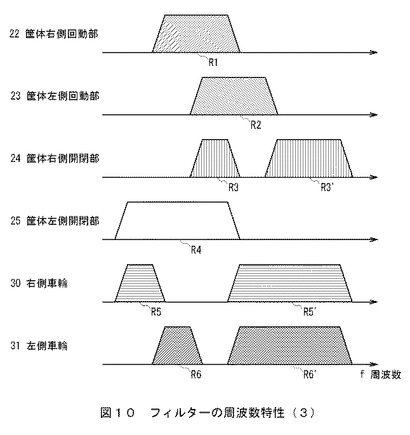
この第3の実施の形態の場合のロボット装置11は、図10に示すように、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側開閉部24に対応付けられた第3のフィルタF3が、音楽データの低周波数帯域側の第3の周波数帯域R3と高周波数帯域側の第3の周波数帯域R3’のデータ成分の抽出用とに2個設けられている。またロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、右側車輪30に対応付けられた第5のフィルタF5が、音楽データの低周波数帯域側の第5の周波数帯域R5と高周波数帯域側の第5の周波数帯域R5’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、左側車輪31に対応付けられた第6のフィルタF6が、音楽データの第6の周波数帯域R6と、第5の周波数帯域R5’と同一の周波数帯域でなる第6の周波数帯域R6’のデータ成分の抽出用とに2個設けられている。すなわち、この第3の実施の形態の場合のデータ成分抽出部42は、対になっている右側車輪30及び左側車輪31の駆動用に、同じ周波数帯域でなる第5の周波数帯域R5’及び第6の周波数帯域R6’を抽出するようにフィルタが設けられている。
【0070】
これにより主制御部40は、音楽の、第5の周波数帯域R5’及び第6の周波数帯域R6’に相当する音域の音が所定の音量レベル以上で含まれていることに応じて、例えば、右側車輪30及び左側車輪31の両方を同一の方向に回転させてロボット装置11自体を真っ直ぐに走らせたり、右側車輪30及び左側車輪31を互いに逆の方向に回転させてロボット装置11自体をその場で回転するように走らせたりすることができる。すなわち主制御部40は、対になっている可動部に対して同じ周波数帯域のデータ成分の抽出するフィルタを設けることにより、対になっている可動部を連携して動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0071】
またこの場合、図10に示されているように、第5の周波数帯域R5と第5の周波数帯域R5’との周波数帯域の長さが異なるようにフィルタ(この場合第5のフィルタF5)を設けていることにより、単に、同じ長さの周波数帯域のデータ成分を抽出する場合に比して、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0072】
(4)他の実施例
なお上述した第1乃至第3の実施の形態においては、外部に流れている音楽をマイク37で集音して音楽データを生成するようにした場合について述べたが、本発明はこれに限らず、ロボット装置11にスピーカを設けると共に、記憶部41に音楽データを予め記憶させておいたり、無線通信やストリーム配信で転送されてくる音楽データ受信するようにしても良い。こうすることでロボット装置11は、音楽データを自ら再生してスピーカから出力すると共に、かかる音楽データの再生にリアルタイムに追随するようにして6個の可動部を動かすことができ、外部に音楽が流されていなくても、自ら音楽を出力しつつ、あたかも音楽に合わせて踊っているかのように見せることができる。
【0073】
また上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルに応じて、6個の可動部である筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を動かすようにした場合について述べたが、本発明はこれに限らず、可動部の数は複数であれば特に限定しないし、音楽の周波数帯域毎の部分音量レベルに応じて右側発光部34及び左側発光部35を発光させるようにしても良い。
【0074】
さらに上述した第1乃至第3の実施の形態においては、記憶部41に対し、6個の可動部に対応するそれぞれ複数種類の動きパターンデータを記憶するようにした場合について述べたが、本発明はこれに限らず、記憶部41には、6個の可動部に対応するそれぞれ動きパターンデータを各可動部に対して1種類ずつ記憶するようにしても良い。
【0075】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、記憶部41に記憶する6個の可動部に対応するそれぞれ複数種類の動きパターンデータに応じた動きで動くように、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたときに、例えば筐体右側回動部22を単に回転させたり、筐体左側開閉部25を一回だけ開閉させたり等の所定の動きをするように、主制御部40と駆動制御部43との間で設定しておいても良い。こうすることでロボット装置11は、記憶部41を必要としない分だけ構成を簡略化することができ、結果としてコストを抑えることができる。またこの場合、例えば音楽の第1の周波数帯域R1の第1の部分音量レベルが所定の閾値を越えたときに筐体右側回動部22を一方向に回転させ、次に音楽の第1の周波数帯域R1の第1の部分音量レベルが所定の閾値を越えたときに筐体右側回動部22を一方向とは逆の方向に回転させるようにして、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越える毎に6個の可動部の動きをトグルのように切り換えるようにしても良い。
【0076】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたときに6個の可動部を駆動制御するだけでなく、音量レベルに応じて6個の可動部の動きの速さを変更するようにしても良い。こうすることでロボット装置11は、あたかもロボット装置11自体が音楽の音量に同調した動きで踊っているかのように見せることができる。
【0077】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)により音楽データから抽出された、第1〜第6のデータ成分(D1〜D6)の有無に応じて6個の可動部を駆動制御するようにしても良く、その場合も上述の実施例と同様の効果を得ることができる。
【0078】
さらに上述した第1乃至第3の実施の形態においては、外部に流れている音楽をマイク37で集音して音楽データを生成するようにした場合について述べたが、本発明はこれに限らず、音楽だけでなく、単なる人の声や物がぶつかる音、物が擦れる音などのように、音楽も含めた音声を集音して音声データを生成するようにしても良く、その場合も上述の実施例と同様の効果を得ることができる。
【0079】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルのうち、低音に相当する周波数帯域の部分音量レベルのピークを検出することで音楽のビートを検出するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルのうち、どの周波数帯域の部分音量レベルのピークから音楽のビートを検出するようにしても良いし、音楽データを直接取得するようにして、かかる音楽データから検出される音楽全体の音量レベルのピークから音楽のビートを検出するようにしても良い。また、12音解析などの所定の解析方法を用いるようにしても良く、その場合、12音解析の解析結果から音楽の各音階に対して各可動部の動きを関連付けておくようにすることで、単音か和音(コード和音)かの違いに応じて、ロボット装置11に異なる動きをさせることができる。
【0080】
さらに上述した第1乃至第3の実施の形態においては、動きパターンによる動きが完了するまで(すなわち、動きパターンに対応する動き実行時間が過ぎるまで)の間に、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を再び越えたことを検出した場合には、現時点で実行中の動きが完了するまで継続するようにした場合について述べたが、本発明はこれに限らず、動きパターンによる動きが完了していなくても(すなわち、動きパターンに対応する動き実行時間が過ぎていなくても)、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を越える毎に新たに動きを開始するように駆動制御しても良い。
【0081】
さらに上述した実施の形態においては、音楽の周波数帯域毎の部分音量レベルを所定時間(この場合1秒)毎に検出するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルを検出する時間は特に限定せずに、例えば、動きパターンデータの動き実行時間(この場合数秒)よりも長い時間であっても良い。そして、音楽の周波数帯域毎の部分音量レベルを検出する時間が、6軸分の可動部のそれぞれに対応する動きパターンデータの動き実行時間よりも長くなるように設定されていた場合、次の部分音量レベルを検出するまでの間に、かかる動きパターンデータに応じた動きを繰り返すようにしても良い。
【0082】
さらに上述した第1乃至第3の実施の形態においては、BPM120を基準のテンポとしてテンポ率を算出するようにした場合について述べたが、本発明はこれに限らず、最終的に、音楽のテンポに応じて6個の可動部の動きの速さを変化させることができるのであれば、音楽のテンポを直接テンポ率として用いても良く、音楽のテンポ率を算出して数値化する方法は限定しないし、そのときの基準のテンポ及びその表現方法も限定しない。
【0083】
さらに上述した第1乃至第3の実施の形態においては、ロボット装置11の6個の可動部のそれぞれの駆動用に、それぞれ1個又は2個のフィルタを対応付けるようにした場合について述べたが、本発明はこれに限らず、6個の可動部のそれぞれに対応付けるフィルタの数は限定しない。
【0084】
さらに上述した第1乃至第3の実施の形態においては、本発明による可動部駆動装置を、図1乃至図11について、略回転楕円体状の装置筐体を有する上述したロボット装置11に適用するようにした場合について述べたが、本発明はこれに限らず、外部に流れている音声を集音してその音楽に合わせて動く可動部を有するものであれば、球体状、円錐体状、円柱状、立方体状、直方体状、人型及び動物型のロボット装置や玩具であっても良い。
【0085】
さらに上述した第1乃至第3の実施の形態においては、本発明による可動部駆動装置を、図1乃至図11について、移動機構としての二輪を有する上述したロボット装置11に適用するようにした場合について述べたが、本発明はこれに限らず、移動機構を有するロボット装置や玩具であれば良く、移動機構としては一輪及び複数輪でも良いし、二足歩行型や四足歩行型等の多足歩行でも良いし、キャタピラ等であっても良い。
【0086】
さらに上述した第1乃至第3の実施の形態においては、略回転楕円体状の装置筐体として、図1乃至図11について上述した回転楕円体状筐体20を適用するようにした場合について述べたが、本発明はこれに限らず、球体状、円錐体状、円柱状、立方体状、直方体状、人型及び動物型でなる装置筐体を広く適用することができる。
【0087】
さらに上述した第1乃至第3の実施の形態においては、外部の音声を集音して音声データを生成する集音部として、図1乃至図11について上述したマイク37を適用するようにした場合について述べたが、具体的には、スピーカ一体型のマイクやダイナミックマイク、コンデンサマイク等、この他種々の構成でなる集音部を広く適用することができる。
【0088】
さらに上述した第1乃至第3の実施の形態においては、音声データから、音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部として、図1乃至図11について上述したデータ成分抽出部42を適用するようにした場合について述べたが、本発明はこれに限らず、主制御部40やフィルタ一体型の制御部等、この他種々の構成でなる抽出部を広く適用することができる。
【0089】
さらに上述した第1乃至第3の実施の形態においては、抽出部により抽出された、音声の所定の複数の周波数帯域毎のデータ成分に基づいて、複数の上記可動部のそれぞれを駆動制御する駆動制御部として、図1乃至図11について上述した駆動制御部43を適用するようにした場合について述べたが、本発明はこれに限らず、主制御部40や駆動制御部一体型の制御部等、この他種々の構成でなる駆動制御部を広く適用することができる。
【0090】
さらに上述した第1乃至第3の実施の形態においては、音声データから、当該音声データに基づく音声のビートを検出するビート検出部として、図1乃至図11について上述した主制御部40を適用するようにした場合について述べたが、本発明はこれに限らず、音声データから、当該音声データに基づく音声のビートを検出するハードウェア構成のビート検出回路等のように、この他種々のビート検出部を広く適用することができる。
【0091】
さらに上述した第1乃至第3の実施の形態においては、ビート検出部により検出されたビートから、当該音声データに基づく上記音声のテンポを検出するテンポ検出部として、図1乃至図11について上述した主制御部40を適用するようにした場合について述べたが、本発明はこれに限らず、ビート検出部により検出されたビートから、当該音声データに基づく上記音声のテンポを検出するハードウェア構成のテンポ検出回路等のように、この他種々のテンポ検出部を広く適用することができる。
【産業上の利用可能性】
【0092】
本発明は、音楽に合わせて動くロボット装置に利用することができる。
【図面の簡単な説明】
【0093】
【図1】本実施の形態による可動部駆動装置の概要を示すブロック図である。
【図2】ロボット装置の外観構成を示す略線的斜視図である。
【図3】ロボット装置の背面構成を示す略線図である。
【図4】筐体右側開閉部及び筐体左側開閉部の開閉の様子の説明に供する略線図である。
【図5】筐体右側回動部及び筐体左側回動部の回動の様子の説明に供する略線図である。
【図6】ロボット装置の回路構成を示すブロック図である。
【図7】データ成分抽出部の構成を示すブロック図である。
【図8】フィルタの周波数特性を示す略線図(1)である。
【図9】フィルタの周波数特性を示す略線図(2)である。
【図10】フィルタの周波数特性を示す略線図(3)である。
【図11】可動部駆動処理手順を示すフローチャートである。
【符号の説明】
【0094】
1……可動部駆動装置、2……装置筐体、3、22、23、24、25、30、31……可動部、4……集音部、5……抽出部、6…駆動制御部、10……音楽再生システム、11……ロボット装置、22……筐体右側回動部、23……筐体左側回動部、24……筐体右側開閉部、25……筐体左側開閉部、30……右側車輪、31……左側車輪、34……右側発光部、35……左側発光部、37……マイク、40……主制御部、41……記憶部、42……データ成分抽出部、43……駆動制御部、F1……第1のフィルタ、F2……第2のフィルタ、F3……第3のフィルタ、F4……第4のフィルタ、F5……第5のフィルタ、F6……第6のフィルタ、R1……第1の周波数帯域、R2……第2の周波数帯域、R3……第3の周波数帯域、R4……第4の周波数帯域、R5……第5の周波数帯域、R6……第6の周波数帯域、RT1…可動部駆動処理手順。
【技術分野】
【0001】
本発明は可動部駆動装置及び可動部駆動方法に関し、例えば音楽に合わせて動くロボット装置に適用して好適なものである。
【背景技術】
【0002】
従来のロボット装置は、外部の音楽を集音してかかる音楽の音量レベルを検出し、単位時間あたりの音量レベルの差が大きい場合には激しい音楽であると判別して、ロボット装置の腕を音量レベルに応じた速さで上下に動かしていた。また、ロボット装置は、単位時間あたりの音量レベルの差が小さい場合には静かな音楽であると判別して、ロボット装置の全体を音量レベルに応じた速さで左右に動かしていた(例えば特許文献1参照)。
【特許文献1】特開平3−123581号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところが従来のロボット装置は、複数の可動部が設けられているとしても、これらを音楽の音量レベルといった1つの情報をもとに動かすようになされているので、複数の可動部のそれぞれを独立に動かして複雑な動きをすることができないという問題があった。
【0004】
本発明は以上の点を考慮してなされたもので、複数の可動部を全体として複雑な動きで動かし得る可動部駆動装置及び可動部駆動方法を実現する。
【課題を解決するための手段】
【0005】
かかる課題を解決するため本発明においては、所定の動きで可動する複数の可動部と、外部の音声を集音して音声データを生成する集音部と、音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部と、抽出部により抽出された音声の所定の複数の周波数帯域毎のデータ成分に基づいて複数の可動部のそれぞれを駆動制御する駆動制御部とを設けるようにした。
【発明の効果】
【0006】
従って本発明では、外部の音声を集音して音声データを生成し、生成した音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出すると共に、抽出したデータ成分に基づいて当該装置に設けられた複数の可動部のそれぞれを駆動制御するようにしたことにより、複数の可動部のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができる。
【0007】
本発明によれば、外部の音声を集音して音声データを生成し、生成した音声データから音声の所定の複数の周波数帯域毎のデータ成分を抽出すると共に、抽出したデータ成分に基づいて当該装置に設けられた複数の可動部のそれぞれを駆動制御するようにしたことにより、複数の可動部のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る可動部駆動装置及び可動部駆動方法を実現し得る。
【発明を実施するための最良の形態】
【0008】
以下図面について、本発明の一実施の形態を詳述する。
【0009】
(1)第1の実施の形態
(1−1)本実施の形態の概要
図1において、1は全体として本実施の形態による可動部駆動装置の構成の概要を示す。可動部駆動装置1は、略回転楕円体状の装置筐体2を有する。また可動部駆動装置1には、所定の動きで可動する複数の可動部3が設けられている。さらに可動部駆動装置1の集音部4は、外部の音楽を集音して音楽データを生成する。さらに可動部駆動装置1の抽出部5は、集音部4で生成した音楽データから音楽の所定の複数の周波数帯域毎のデータ成分を抽出する。さらに可動部駆動装置1の駆動制御部6は、抽出部5により抽出された音楽の所定の複数の周波数帯域毎のデータ成分に基づいて、複数の可動部3のそれぞれを駆動制御する。かかる構成により可動部駆動装置1は、複数の可動部3のそれぞれを、複数の周波数帯域のデータ成分に基づいて独立に動かすことができ、結果として個々の可動部3の動きを任意に組み合わせることができ、かくして、複数の可動部3を全体として複雑な動きで動かし得る。
【0010】
(1−2)ロボット装置の構成
図2(A)及び(B)並びに図3において、11は全体として本発明を適用したロボット装置を示し、例えば全体として略回転楕円体状の装置筺体(以下、これを回転楕円体状筐体と呼ぶ)20を有している。かかる回転楕円体状筐体20は、その中央の略樽型形状の部分でなる筐体中央部21の互いに対向する一対の端部のうち、一方の端部(以下、これを右側端部と呼ぶ)側に略円錐台形状の部分でなる第1の筐体回動部(以下、これを筐体右側回動部と呼ぶ)22が設けられている。また回転楕円体状筐体20は、筐体中央部21の他方の端部(以下、これを左側端部と呼ぶ)側に、略円錐台形状の部分でなる第2の筐体回動部(以下、これを筐体左側回動部と呼ぶ)23が設けられている。
【0011】
さらに回転楕円体状筐体20は、筐体右側回動部22の右側に、略キャップ形状の部分でなる第1の筐体開閉部(以下、これを筺体右側開閉部と呼ぶ)24が設けられている。さらにまた回転楕円体状筐体20は、筐体左側回動部23の左側に、略キャップ形状の部分でなる第2の筐体開閉部(以下、これを筺体左側開閉部と呼ぶ)25が設けられている。
【0012】
そして回転楕円体状筐体20の中心点P1から当該回転楕円体状筐体20表面の最も遠い右側及び左側の両頂点P2、P3を直線で結ぶ線分(すなわち、回転楕円体の長軸)を水平回動軸線L1とすると、筐体右側回動部22は、筐体中央部21の右側端部に対し、当該水平回動軸線L1を中心にして軸回り一方向D1及びこれとは逆の軸回り他方向に回動可能に枢支されている。また筐体左側回動部23は、筐体中央部21の左側端部に対し、水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。
【0013】
さらに図4に示すように、筐体右側開閉部24は、筐体右側回動部22に対し、当該筐体右側回動部22の右側縁部22Aの所定位置に設けられたヒンジ部26を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体右側開閉部24は、筐体右側回動部22の右側縁部22Aに対し開口縁部24Aを当接させる位置から、右側縁部22Aと開口縁部24Aとの開き角度が略90度となる位置までの所定角度範囲内で任意の角度に開くようになされている。一方、筐体左側開閉部25は、筐体左側回動部23に対し、当該筐体左側回動部23の左側縁部23Aの所定位置に設けられたヒンジ部27を介して所定角度範囲で開閉可能に取り付けられている。因みに筐体左側開閉部25は、筐体左側回動部23の左側縁部23Aに対し開口縁部25Aを当接させる位置から、左側縁部23Aと開口縁部25Aとの開き角度が略90度となる位置までの所定角度範囲で任意の角度に開くようになされている。
【0014】
また図5に示すように、筐体右側回動部22は、筐体左側回動部23とは独立して回動し得るようになされている。そして筐体右側回動部22は、筐体右側開閉部24の開閉動作からも独立して回動し得るようになされている。また筐体左側回動部23も、筐体左側開閉部25の開閉動作から独立して回動し得るようになされている。
【0015】
これに加えて図2(A)及び(B)並びに図3に示すように、筐体中央部21の右側端部には、当該筐体中央部21の最大外径よりも大きい所定外径を有する円環形状の右側車輪30が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。また筐体中央部21の左側端部には、右側車輪30と同様形状及び同様外形の左側車輪31が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回動可能に枢支されている。これら右側車輪30及び左側車輪31は、それぞれが回転して回転楕円体状筐体20を自走させるためのものであり、当該右側車輪30と左側車輪31とはそれぞれ独立して回動し得るようになされている。
【0016】
そして筐体中央部21内には、内壁所定位置にバッテリ等でなる重り32が固定されている。また筐体中央部21は、回転楕円体状筐体20の中心点P1から右側端部(すなわち、右側車輪30)までの距離と、当該回転楕円体状筐体20の中心点P1から左側端部(すなわち、左側車輪31)までの距離とがほぼ等しい所定距離に選定されている。さらに筐体右側回動部22及び筐体左側回動部23は、互いに同じ形状でなり、互いの幅がほぼ等しい所定幅に選定されている。さらに筐体右側開閉部24及び筐体左側開閉部25も、互いに同じ形状でなり、それぞれ開口縁部24A及び25Aから表面の頂点P2及びP3までの幅がほぼ等しい所定長さに選定されている。すなわち回転楕円体状筐体20は、当該回転楕円体状筐体20の中心P1を通り、水平回動軸線L1を垂線とする仮想平面(図示せず)に対し左右が面対称に形成されている。
【0017】
このため回転楕円体状筐体20は、机の天板や床等(以下、これらをまとめて床と呼ぶ)に載上される場合、筐体中央部21の最大外形部分の外周面を当該床の表面から僅かに離間させ、かつ水平回動軸線L1を床の表面と並行にした姿勢で右側車輪30及び左側車輪31により支持される。これに加えて回転楕円体状筐体20は、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、床に載上された場合、当該重り32を鉛直下側に位置させた(すなわち、重り32部分でなる重心を床の表面に極力近づけた)姿勢(以下、これを基準姿勢と呼ぶ)となる。そして筐体中央部21内の重り32は、その重さが比較的重く選定されている。従って回転楕円体状筐体20は、右側車輪30及び左側車輪31によって支持された状態で床に載上された場合、筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれ、また当該筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等に傾くことなく基準姿勢を維持することができる。
【0018】
また回転楕円体状筐体20は、床の上を右側車輪30及び左側車輪31の回転により自走する場合も、筐体中央部21内の重り32により当該筐体中央部21の重心が中心点P1から内壁寄りにずれているため、当該筐体中央部21が水平回動軸線L1を中心にして軸回り一方向D1及び軸回り他方向に回転することを抑制し得るようになされている。さらに回転楕円体状筐体20は、重り32が比較的重いため、自走する際に筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して任意の角度に開かれ、また当該筐体右側開閉部24及び筐体左側開閉部25がそれぞれ独立して開かれた状態で筐体右側回動部22及び筐体左側回動部23がそれぞれ独立して回転しても、右側及び左側等にほとんど傾くことなく基準姿勢をほぼ維持することができる。
【0019】
これに加えて筐体中央部21の表面には、基準姿勢で上側となる位置に、指や手等が接触したことを検知するための接触検知センサ部33が設けられている。かかる接触検知センサ部33は、例えば、筐体中央部21の表面における指先大の領域に接触した指や手等を検知するようになされている。また右側車輪30の右側には、光を発する環状の右側発光部34が設けられている。さらに左側車輪31の左側にも、右側発光部34と同様構成の光を発する環状の左側発光部35が設けられている。そしてかかる右側発光部34及び左側発光部35は、それぞれ全体や一部分、また発光色等のように発光状態を可変して発光し得るようになされている。
【0020】
かかる構成に加えロボット装置11(図2)の場合、回転楕円体状筐体20の基準姿勢における筐体中央部21の背面で水平回動軸線L1よりも僅かに上側となる位置に、穴部36が形成されている。この穴部36内には、マイク37が収納されている。マイク37は、ロボット装置11の外部の音楽を集音し、集音した音楽に所定のアナログデジタル処理を施すことにより音楽データを生成する。
【0021】
(1−3)ロボット装置の回路構成
次いで図6を用いてロボット装置11の回路構成について説明する。かかるロボット装置11は、各回路が回転楕円体状筐体20内に収納されており、当該回路としてロボット装置11全体を統括的に制御する主制御部40を有している。そして主制御部40は、例えばフラッシュメモリでなる記憶部41に予め記憶している制御プログラム等の各種プログラムに従って各種処理を実行する。
【0022】
また主制御部40は、記憶部41に対し、ロボット装置11に設けられた可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31それぞれを予め選定された数秒の所定時間(以下、これを動き実行時間と呼ぶ)に、所望の動きパターンで動かすための動きパターンデータを記憶している。そして動きパターンデータは、筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30、左側車輪31毎に複数種類用意されている。
【0023】
この場合、筐体右側回動部22や筐体左側回動部23に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該筐体右側回動部22や筐体左側回動部23に対する回転方向や回転角度、回転速度、回転方向反転回数等を示すように生成されている。そして筐体右側回動部22や筐体左側回動部23に対応する動きパターンとしては、例えば比較的遅く一方向へ回転するように動く動きパターンや、比較的速く一方向へ回転するように動く動きパターン、回転方向をすばやく何度も反転させるように動く動きパターン等がある。
【0024】
また筐体右側開閉部24や筐体左側開閉部25に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該筐体右側開閉部24や筐体左側開閉部25に対する開閉方向や開閉角度、開閉速度、開閉回数等を示すように生成されている。そして筐体右側開閉部24や筐体左側開閉部25に対応する動きパターンとしては、例えば比較的遅く開く又は閉じるように動く動きパターンや、比較的速く開く又は閉じるように動く動きパターン、開閉方向やすばやく何度も反転させるように動く動きパターン等がある。
【0025】
さらに右側車輪30や左側車輪31に対応する複数種類の動きパターンデータは、それぞれ動き実行時間に動きを開始してからその動きを終了させるまでの当該右側車輪30や左側車輪31に対する回転方向や回転角度、回転速度、回転回数等を示すように生成されている。そして右側車輪30や左側車輪31に対応する動きパターンとしては、例えば比較的遅く一方向へ回転するように動く動きパターンや、比較的速く一方向へ回転するように動く動きパターン、回転方向をすばやく何度も反転させるように動く動きパターン等がある。
【0026】
そして主制御部40は、ロボット装置11が床等の平面上に載置された状態において、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が入れられると、右側発光部34及び左側発光部35を所定の発光パターンで発光させて起動したことをユーザに通知すると共に、音楽に合わせてロボット装置の各可動部を動かす可動部駆動処理を開始する。
【0027】
主制御部40は、かかる可動部駆動処理を開始すると、例えばオーディオプレイヤからの出力により外部に流れている音楽をマイク37により集音して音楽データを生成し、これをデータ成分抽出部42へ送出する。データ成分抽出部42は、図7に示すように、ロボット装置11の可動部としての筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31(以下、これを6個の可動部とも呼ぶ)のそれぞれを駆動するために対応付けられた第1〜第6のフィルタ(F1〜F6)から構成されている。これら第1〜第6のフィルタ(F1〜F6)のそれぞれは、図8に示すように、音楽データから、周波数軸fに沿って所定の第1〜第6の周波数帯域(R1〜R6)それぞれのデータ成分を、音楽の低音域に相当する低い周波数帯域から順に抽出するようになされている。ちなみに、これら第1〜第6のフィルタ(F1〜F6)により定められている第1〜第6の周波数帯域(R1〜R6)は、隣接する周波数帯域が一部重なっている。
【0028】
そしてデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第1のフィルタF1は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第1の周波数帯域R1のデータ成分(以下、これを第1のデータ成分と呼ぶ)D1を筐体右側回動部22の駆動用に抽出して主制御部40へ送出する。主制御部40は、第1のデータ成分D1を受け取ると、かかる第1のデータ成分D1から音楽の第1の周波数帯域R1に相当する部分の音量レベル(以下、これを第1の部分音量レベルと呼ぶ)を所定時間(例えば1秒程度)毎に検出する。そして主制御部40は、検出した第1の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側回動部22に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体右側回動部22に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部22を駆動制御する。すなわち主制御部40は、音楽の中に、第1の周波数帯域R1に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体右側回動部22を所定の動きパターンで回動する。
【0029】
またデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第2のフィルタF2は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第2の周波数帯域R2のデータ成分(以下、これを第2のデータ成分と呼ぶ)D2を筐体左側回動部23の駆動用に抽出して主制御部40へ送出する。主制御部40は、第2のデータ成分D2を受け取ると、かかる第2のデータ成分D2から音楽データの第2の周波数帯域R2に相当する部分の音量レベル(以下、これを第2の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第2の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している筐体左側回動部23に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体左側回動部23に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部23を駆動制御する。すなわち主制御部40は、音楽の中に、第2の周波数帯域R2に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体左側回動部23を所定の動きパターンで回動する。
【0030】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第3のフィルタF3は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第3の周波数帯域R3のデータ成分(以下、これを第3のデータ成分と呼ぶ)D3を筐体右側開閉部24の駆動用に抽出して主制御部40へ送出する。主制御部40は、第3のデータ成分D3を受け取ると、かかる第3のデータ成分D3から音楽データの第3の周波数帯域R3に相当する部分の音量レベル(以下、これを第3の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第3の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側開閉部24に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体右側開閉部24に対応する動きパターンデータに応じた動きパターンで動くように筐体右側回動部24を駆動制御する。すなわち主制御部40は、音楽の中に、第3の周波数帯域R3に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体右側開閉部24を所定の動きパターンで開閉する。
【0031】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第4のフィルタF4は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第4の周波数帯域R4のデータ成分(以下、これを第4のデータ成分と呼ぶ)D4を筐体左側開閉部25の駆動用に抽出して主制御部40へ送出する。主制御部40は、第4のデータ成分D4を受け取ると、かかる第4のデータ成分D4から音楽データの第4の周波数帯域R4に相当する部分の音量レベル(以下、これを第4の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第4の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、筐体左側開閉部25に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される筐体左側開閉部25に対応する動きパターンデータに応じた動きパターンで動くように筐体左側回動部25を駆動制御する。すなわち主制御部40は、音楽の中に、第4の周波数帯域R4に相当する音域の音が所定の音量レベル以上で含まれている場合には、筐体左側開閉部25を所定の動きパターンで開閉する。
【0032】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第5のフィルタF5は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第5の周波数帯域R5のデータ成分(以下、これを第5のデータ成分と呼ぶ)D5を右側車輪30の駆動用に抽出して主制御部40へ送出する。主制御部40は、第5のデータ成分D5を受け取ると、かかる第5のデータ成分D5から音楽データの第5の周波数帯域R5に相当する部分の音量レベル(以下、これを第5の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第5の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、右側車輪30に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される右側車輪30に対応する動きパターンデータに応じた動きパターンで動くように右側車輪30を駆動制御する。すなわち主制御部40は、音楽の中に、第5の周波数帯域R5に相当する音域の音が所定の音量レベル以上で含まれている場合には、右側車輪30を所定の動きパターンで回動する。
【0033】
さらにデータ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち第6のフィルタF6は、可動部駆動処理時、マイク37から送出される音楽データから、周波数軸fに沿って第6の周波数帯域R6のデータ成分(以下、これを第6のデータ成分と呼ぶ)D6を左側車輪31の駆動用に抽出して主制御部40へ送出する。主制御部40は、第6のデータ成分D6を受け取ると、かかる第6のデータ成分D6から音楽データの第6の周波数帯域R6に相当する部分の音量レベル(以下、これを第6の部分音量レベルと呼ぶ)を所定時間毎に検出する。そして主制御部40は、検出した第6の部分音量レベルが所定の閾値を越えている場合には、記憶部41に記憶している、左側車輪31に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して駆動制御部43に送出する。駆動制御部43は、主制御部40から送出される左側車輪31に対応する動きパターンデータに応じた動きパターンで動くように左側車輪31を駆動制御する。すなわち主制御部40は、音楽の中に、第6の周波数帯域R6に相当する音域の音が所定の音量レベル以上で含まれている場合には、左側車輪31を所定の動きパターンで回動する。
【0034】
そして主制御部40は、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が切断されると、かかる可動部駆動処理を終了する。
【0035】
このようにして主制御部40は、可動部駆動処理時、外部に流れている音楽の第1〜第6の周波数帯域(R1〜R6)のそれぞれに相当する部分の第1〜第6の部分音量レベル(以下、これらを単に音楽の周波数帯域毎の部分音量レベルとも呼ぶ)に応じて、6個の可動部のそれぞれを同時並行的に独立に動かすことができ、結果として個々の可動部の動きを任意に組み合わせることができる。すなわちロボット装置11は、可動部駆動処理時、外部に流れている音楽に合わせて6個の可動部のそれぞれを種々の組み合わせで動かすことができ、あたかもロボット装置11自体が音楽に合わせて複雑な踊りを踊っているかのように見せることができる。
【0036】
また主制御部40は、可動部駆動処理時、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に動かすことにより、音楽の各周波数帯域に相当する音域の音に合わせるようにして6個の可動部の動きの有無を組み合わせて動かすことができる。すなわちロボット装置11は、音楽毎に異なる主旋律や対旋律、コード等に対応する周波数帯域の音量レベルに合わせるようにして、6個の可動部の動きの有無を組み合わせて動かすことができ、あたかも音楽の違いを認識して音楽毎に異なる動きで踊りを踊っているかのように見せることができる。
【0037】
さらに主制御部40は、可動部駆動処理時、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じてロボット装置11の6個の可動部のそれぞれの動きパターンデータを記憶部41から読み出すとき、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの中から、それぞれ1つの動きパターンデータをランダムに読み出していることにより、ロボット装置11の6個の可動部のそれぞれに対して1種類の動きパターンデータしか用意されていない場合に比して、ロボット装置11の6個の可動部を全体として多くの動きパターンの組み合わせで動かすことができる。すなわちロボット装置11は、同じような動きばかりしてユーザに動きを飽きさせること無く、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの組み合わせの分だけロボット装置11全体として異なる動きで動くことができ、それだけエンターテイメント性を高めることができる。
【0038】
ちなみに、主制御部40は、可動部駆動処理時、周波数帯域毎の部分音量レベルが所定の閾値を越えたことに応じて、6個の可動部のうち対応する可動部を動きパターンデータに応じた動きパターンで動かすとき、かかる動きパターンによる動きが完了するまでの間に(すなわち、動きを開始してから動き実行時間が経過するまでの間に)、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を再び越えたことを検出した場合でも、現時点で実行中の動きパターンの動きを継続するようになされている。
【0039】
(1−4)可動部駆動処理手順
ここで、上述した可動部駆動処理の手順について説明する。ロボット装置11は、ロボット装置11が床等の平面上に載置された状態で、接触検知センサ部33に指や手等が接触することでロボット装置11の主電源が入れられると、図11に示すような可動部駆動処理手順RT1を開始する。ロボット装置11の主制御部40は、かかる可動部駆動処理手順RT1を開始すると、ステップSP1において、例えばオーディオプレイヤによりロボット装置11の外部に流れている音楽をマイク37により集音して音楽データを生成し、次のステップSP2に移る。
【0040】
ステップSP2において主制御部40は、音楽データから、周波数軸fに沿って所定の第1〜第6の周波数帯域(R1〜R6)それぞれに対応する、第1〜第6のデータ成分(D1〜D6)を抽出し、次のステップSP3に移る。
【0041】
ステップSP3において主制御部40は、抽出した第1〜第6のデータ成分(D1〜D6)から、音楽の周波数帯域毎の部分音量レベルを所定時間毎に検出し、次のステップSP4に移る。
【0042】
ステップSP4において主制御部40は、検出した音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に駆動制御し、次のステップSP5に移る。
【0043】
ステップSP5において主制御部40は、接触検知センサ部33に指や手等が接触したか否かを判別する。このステップSP5において否定結果が得られると、このことは、未だユーザによりロボット装置11の主電源が切断されていないことを示している。従って主制御部40は、このときステップSP1に戻り、かかるステップSP5で肯定結果が得られるまで上述したステップSP1〜ステップSP5の手順を繰り返す。
【0044】
これに対しステップSP5において肯定結果が得られると、このことは、ユーザによりこの可動部駆動処理手順RT1が終了されてロボット装置11の主電源を切断する操作がなされたことを示している。従って制御部40は、次のステップSP6に移り、かかる可動部駆動処理手順RT1を終了する。
【0045】
このような可動部駆動処理手順RT1により、主制御部40は、音楽に合わせて6個の可動部を独立に動かすようになされている。
【0046】
(1−5)ビート検出
かかる構成に加えて、ロボット装置11は、可動部駆動処理時、外部に流れている音楽のビートを検出する機能を有している。
【0047】
すなわちロボット装置11の主制御部40は、可動部駆動処理時、マイク37から送出される音楽データから周波数帯域毎の部分音量レベルを検出したとき、かかる周波数帯域毎の部分音量レベルのうち、音楽の中の低音(すなわち、ドラムやベースといった打楽器によって放音される、音楽の基音を含む音域の音)に相当する周波数帯域の部分音量レベルのエンベロープ波形からピークの位置を検出することにより、流れている音楽のビートを検出し、この検出したビートを駆動制御部43に送出する。そして駆動制御部43は、主制御部40から6個の可動部それぞれに対応する動きパターンデータが送出されると、音楽のビートに合わせて動きを開始する。つまり駆動制御部43は、例えば主制御部40から筐体右側回動部22に対応する動きパターンデータが送出された場合に、音楽のビートに同期して筐体右側回動部22の動きが開始するように駆動制御する。また、一般に1曲の音楽の中でビートの周期はほぼ一定であるので、駆動制御部43は、検出されたビートの次に到来するビート(すなわち、検出されたビートの次に検出するであろうビート)のタイミングも予想することができ、次のビートに同期して各可動部の動きが完了するようにも制御する。これにより駆動制御部43は、例えば筐体右側開閉部24が閉じた状態において、筐体右側開閉部24が開く動作を開始してからビートの検出に合わせてこの筐体右側開閉部24が開く動作を完了することもできる。
【0048】
このようにして主制御部40は、可動部駆動処理時、音楽のビートに同期して6個の可動部のそれぞれの動きを開始または完了し、例えば、音楽の中でビートにより区切られてなる小節の切り換わりに合わせて6個の可動部のそれぞれの動きを開始または完了することができ、単に周波数帯域毎の部分音量レベルに応じて6個の可動部のそれぞれを駆動制御する場合に比して、音楽の曲調に合った動きをすることができる。
【0049】
(1−6)テンポ検出
また、これに加えロボット装置11は、可動部駆動処理時、音楽のビートに応じて音楽のテンポを検出する機能を有している。
【0050】
すなわちロボット装置11の主制御部40は、可動部駆動処理時、周波数帯域毎の部分音量レベルのピークから音楽のビートを検出したとき、かかるビートの検出周期を計時することにより、流れている音楽のテンポを検出する。そして主制御部40は、音楽のテンポに応じて、6個の可動部のそれぞれの動きパターンデータに設定されている動き実行時間を変更するための、音楽のテンポに応じた倍率(以下、これをテンポ倍率と呼ぶ)を算出する。このテンポ倍率は、例えば、BPM(Beat Per Minute)120のテンポ(すなわち1分間に120のビートが刻まれるテンポ)を基準として、BPM180のテンポが与えられた場合に、「180/120=1.5」のようにして算出されるものであり、基準のテンポよりも速ければ1よりも大きく、基準のテンポよりも遅ければ1よりも小さくなるようになされている。
【0051】
主制御部40は、可動部駆動処理時、音楽のテンポからテンポ倍率を算出すると、駆動部に送出している6個の可動部の動きパターンデータの動き実行時間をテンポ倍率で除算するようにして動きパターンデータを修正する。すなわち主制御部40は、テンポ倍率(この場合1.5)を算出したときに、例えば3秒の動き実行時間の間に筐体右側回動部22を一方向に3回転させる動きパターンデータが与えられた場合、「3秒/1.5=2秒」の動き実行時間の間に筐体右側回動部22を一方向に3回転させるように動きパターンデータを修正し、この修正した動きパターンデータを駆動制御部43に送出する。そして駆動制御部43は、主制御部40から送出された、修正された動きパターンデータに応じて筐体右側回動部22を駆動制御する。ちなみに6個の可動部の他の可動部についても同様である。
【0052】
このようにして主制御部40は、可動部駆動処理時、6個の可動部を駆動制御するとき、音楽のテンポが速ければ6個の可動部のそれぞれの動きを速くすると共に、音楽のテンポが遅ければ6個の可動部のそれぞれの動きを遅くすることができ、あたかもロボット装置11自体が音楽のテンポに同期した動きで踊っているかのように見せることができる。
【0053】
(1−7)第1の実施の形態の動作及び効果
以上の構成においてロボット装置11の主制御部40は、可動部駆動処理時、外部の音楽をマイク37により集音して音楽データを生成し、この音楽データから周波数帯域毎の部分音量レベルを検出する。そして主制御部40は、検出した第1乃至第6の周波数帯域毎の部分音量レベルのそれぞれに応じて、6個の可動部のそれぞれを駆動制御するようにした。
【0054】
従って主制御部40は、6個の可動部のそれぞれを、音楽の複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、ロボット装置11の6個の可動部を全体として複雑な動きで動かすことができる。
【0055】
以上の構成によれば、ロボット装置11は、マイク37により外部の音楽を集音して音楽データを生成し、生成した音楽データから音楽の周波数帯域毎のデータ成分を抽出して、かかるデータ成分から音楽の複数の周波数帯域毎の部分音量レベルを検出すると共に、検出した複数の周波数帯域毎の部分音量レベルに基づいて回転楕円体状筐体20に設けられた6個の可動部のそれぞれを駆動制御するようにしたことにより、6個の可動部のそれぞれを、複数の周波数帯域毎の部分音量レベルに応じて独立に動かすことができ、結果として6個の可動部のうちの個々の可動部の動きを任意に組み合わせることができ、かくして、複数の可動部を全体として複雑な動きで動かし得る。
【0056】
またロボット装置11は、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じて、ロボット装置11の6個の可動部を独立に動かすようにした。これによりロボット装置11は、音楽の各周波数帯域に相当する音域の音に合わせるようにして6個の可動部の動きを組み合わせて動かすことができる。すなわちロボット装置11は、音楽毎に異なる主旋律や対旋律、コード等に対応する周波数帯域の音量レベルに合わせるようにして6個の可動部の動きを組み合わせて動かすことができ、かくして、あたかもロボット装置11自体が音楽の違いを認識して音楽毎に異なる動きで踊りを踊っているかのように見せることができる。
【0057】
さらにロボット装置11は、外部に流れている音楽の周波数帯域毎の部分音量レベルに応じてロボット装置11の6個の可動部のそれぞれの動きパターンデータを記憶部41から読み出すとき、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの中から、それぞれ1つの動きパターンデータをランダムに読み出すようにした。これによりロボット装置11は、6個の可動部のそれぞれに対して1種類の動きパターンデータしか用意されていない場合に比して、6個の可動部を全体として多くの動きパターンの組み合わせで動かすことができる。すなわちロボット装置11は、例えば同じような動きばかりしてユーザに動きを飽きさせること無く、6個の可動部のそれぞれに対して複数種類用意されている動きパターンデータの組み合わせの分だけロボット装置11全体として異なる動きで動くことができ、かくして、エンターテイメント性を高めることができる。
【0058】
さらにロボット装置11は、音楽のビートを検出すると共に、この音楽のビートに同期するようにして、6個の可動部のそれぞれの動きパターンデータに応じた動きパターンの動きを開始するようにした。これによりロボット装置11は、例えば、音楽の中でビートにより区切られてなる小節の切り換わりに合わせて6個の可動部のそれぞれの動きを開始または完了することができ、単に周波数帯域毎の部分音量レベルに応じて6個の可動部のそれぞれを駆動制御する場合に比して、音楽の曲調に合った動きをすることができる。
【0059】
さらにロボット装置11は、音楽のテンポを検出してかかるテンポに応じたテンポ倍率を算出し、このテンポ倍率に応じて6個の可動部のそれぞれの動きパターンデータの動き実行時間を修正してから、修正した動きパターンデータに応じて6個の可動部のそれぞれを動かすようにした。これによりロボット装置11は、音楽のテンポが速ければ6個の可動部のそれぞれの動きを速くすると共に、音楽のテンポが遅ければ6個の可動部のそれぞれの動きを遅くすることができ、かくして、あたかもロボット装置11自体が音楽のテンポに同期した動きで踊っているかのように見せることができる。
【0060】
(2)第2の実施の形態
第2の実施の形態の場合、ロボット装置の構成及びロボット装置の回路構成は上述の第1の実施の形態と同様であり、データ成分抽出部42において、6個の可動部のそれぞれに対応付けられたフィルタの個数や、かかるフィルタに対応する周波数帯域の幅が異なる点が相違する。
【0061】
この第2の実施の形態の場合のロボット装置11は、図9に示すように、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側回動部22に対応付けられた第1のフィルタF1が、音楽データの低周波数帯域側の第1の周波数帯域R1と高周波数帯域側の第1の周波数帯域R1’のデータ成分の抽出用とに2個設けられている。またロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体左側回動部23に対応付けられた第2のフィルタF2が、音楽データの低周波数帯域側の第2の周波数帯域R2と高周波数帯域側の第2の周波数帯域R2’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側開閉部24に対応付けられた第3のフィルタF3が、音楽データの低周波数帯域側の第3の周波数帯域R3と高周波数帯域側の第3の周波数帯域R3’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体左側開閉部25に対応付けられた第4のフィルタF4と、右側車輪30に対応付けられた第5のフィルタF5と、左側車輪31に対応付けられた第6のフィルタF6とが、第1〜第3のフィルタ(F1〜F3)よりも長い幅の周波数帯域のデータ成分を抽出するようになっている。
【0062】
これにより主制御部40は、上述の第1の実施の形態の可動部駆動処理時と同様にして、音楽データから抽出した第1の周波数帯域R1の第1のデータ成分D1から第1の部分音量レベルを検出すると共に、音楽データから抽出した第1の周波数帯域R1’の第1のデータ成分D1’の第1の部分音量レベルを検出し、検出した第1の部分音量レベルD1及び第1の部分音量レベルD1’が所定の閾値を越えている場合には、記憶部41に記憶している、筐体右側回動部22に対応する複数種類の動きパターンデータの中から、1つの動きパターンデータをランダムに読み出して、これに応じて筐体右側回動部22を所定の動きパターンで回動する。
【0063】
このとき、第1の周波数帯域R1のデータ成分D1の第1の部分音量レベルに応じて記憶部41から読み出す動きパターンと、第1の周波数帯域R1’のデータ成分D1’の第1の部分音量レベルに応じて記憶部41から読み出す動きパターンとが異なるようにすることで、主制御部40は、例えば低音側の第1の周波数帯域R1のデータ成分D1の第1の部分音量レベルに応じて当該筐体右側回動部22を一方向に回転させ、その一方で高音側の第1の周波数帯域R1’のデータ成分D1’の第1の部分音量レベルに応じて当該筐体右側回動部22を一方向とは逆方向に回転させることができる。また、第2のフィルタF2に対する筐体左側回動部23及び第3のフィルタF3に対する筐体右側開閉部24についても、同様である。
【0064】
このようにしてロボット装置11は、可動部に対して複数のフィルタを設けることにより、同じ可動部に対して、音楽の音域に応じた異なる動きを割り当てることができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0065】
またロボット装置11は、6個の可動部に対応する複数の周波数帯域(すなわち、図9の第1の周波数帯域R1、第1の周波数帯域R1’、第2の周波数帯域R2、第2の周波数帯域R2’、第3の周波数帯域R3、第3の周波数帯域R3’、第4の周波数帯域R4、第5の周波数帯域R5及び第6の周波数帯域R6)の中の例えば第1の周波数帯域R1と第4の周波数帯域R4とのように、異なる可動部の駆動用に同じ周波数帯域を含む周波数帯域のデータ成分を抽出するようにフィルタを設けるようにすることで、音楽の中に、かかる同じ周波数帯域に相当する音域の音が所定の音量レベル以上で含まれていることに応じて、異なる可動部(この場合筐体右側回動部22及び筐体左側開閉部25)を独立に動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0066】
さらにロボット装置11は、第4〜第6のフィルタ(F4〜F6)に対応する周波数帯域の幅が、第1〜第3のフィルタ(F1〜F3)に対応する周波数帯域の幅よりも長くなるようにしたことにより、全てのフィルタに同じ幅でなる周波数帯域を適用するようにした場合に比して、ロボット装置11の6個の可動部を様々な周波数帯域に対応する音量レベルに応じてそれぞれ動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0067】
さらにロボット装置11は、6個の可動部に対応する複数の周波数帯域(すなわち、図9の第1の周波数帯域R1、第1の周波数帯域R1’、第2の周波数帯域R2、第2の周波数帯域R2’、第3の周波数帯域R3、第3の周波数帯域R3’、第4の周波数帯域R4、第5の周波数帯域R5及び第6の周波数帯域R6)の中の、例えば第1の周波数帯域R1と第4の周波数帯域R4とのように、異なる幅でなる周波数帯域を抽出するフィルタを各可動の駆動用に設けるようにすることで、音楽が与えられたときに、フィルタの周波数帯域の幅に応じて各可動部の動く頻度が可動部毎に異なるようにすることができ、例えば、6個の可動部の中の右側車輪30及び左側車輪31を動かす頻度を上げてロボット装置11が始終走り回っているようにすることもできるし、6個の可動部の中の右側車輪30を動かす頻度だけを上げてロボット装置11が全体として左側に旋回するような方向に走るように設定して机の上から落ち難くするようにもできる。すなわちロボット装置11は、予め各フィルタと各可動部の組み合わせを設定しておくことで、音楽に合わせてユーザの所望するような動きで動くことができる。
【0068】
(3)第3の実施の形態
第3の実施の形態の場合、ロボット装置の構成及びロボット装置の回路構成は上述の第1の実施の形態と同様であり、データ成分抽出部42において、6個の可動部のそれぞれに対応付けられたフィルタの個数や、かかるフィルタに対応する周波数帯域の幅が異なる点が相違する。
【0069】
この第3の実施の形態の場合のロボット装置11は、図10に示すように、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、筐体右側開閉部24に対応付けられた第3のフィルタF3が、音楽データの低周波数帯域側の第3の周波数帯域R3と高周波数帯域側の第3の周波数帯域R3’のデータ成分の抽出用とに2個設けられている。またロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、右側車輪30に対応付けられた第5のフィルタF5が、音楽データの低周波数帯域側の第5の周波数帯域R5と高周波数帯域側の第5の周波数帯域R5’のデータ成分の抽出用とに2個設けられている。さらにロボット装置11は、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)のうち、左側車輪31に対応付けられた第6のフィルタF6が、音楽データの第6の周波数帯域R6と、第5の周波数帯域R5’と同一の周波数帯域でなる第6の周波数帯域R6’のデータ成分の抽出用とに2個設けられている。すなわち、この第3の実施の形態の場合のデータ成分抽出部42は、対になっている右側車輪30及び左側車輪31の駆動用に、同じ周波数帯域でなる第5の周波数帯域R5’及び第6の周波数帯域R6’を抽出するようにフィルタが設けられている。
【0070】
これにより主制御部40は、音楽の、第5の周波数帯域R5’及び第6の周波数帯域R6’に相当する音域の音が所定の音量レベル以上で含まれていることに応じて、例えば、右側車輪30及び左側車輪31の両方を同一の方向に回転させてロボット装置11自体を真っ直ぐに走らせたり、右側車輪30及び左側車輪31を互いに逆の方向に回転させてロボット装置11自体をその場で回転するように走らせたりすることができる。すなわち主制御部40は、対になっている可動部に対して同じ周波数帯域のデータ成分の抽出するフィルタを設けることにより、対になっている可動部を連携して動かすことができ、結果として、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0071】
またこの場合、図10に示されているように、第5の周波数帯域R5と第5の周波数帯域R5’との周波数帯域の長さが異なるようにフィルタ(この場合第5のフィルタF5)を設けていることにより、単に、同じ長さの周波数帯域のデータ成分を抽出する場合に比して、ロボット装置11の6個の可動部を全体として更に複雑な動きで動かすことができる。
【0072】
(4)他の実施例
なお上述した第1乃至第3の実施の形態においては、外部に流れている音楽をマイク37で集音して音楽データを生成するようにした場合について述べたが、本発明はこれに限らず、ロボット装置11にスピーカを設けると共に、記憶部41に音楽データを予め記憶させておいたり、無線通信やストリーム配信で転送されてくる音楽データ受信するようにしても良い。こうすることでロボット装置11は、音楽データを自ら再生してスピーカから出力すると共に、かかる音楽データの再生にリアルタイムに追随するようにして6個の可動部を動かすことができ、外部に音楽が流されていなくても、自ら音楽を出力しつつ、あたかも音楽に合わせて踊っているかのように見せることができる。
【0073】
また上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルに応じて、6個の可動部である筐体右側回動部22、筐体左側回動部23、筐体右側開閉部24、筐体左側開閉部25、右側車輪30及び左側車輪31を動かすようにした場合について述べたが、本発明はこれに限らず、可動部の数は複数であれば特に限定しないし、音楽の周波数帯域毎の部分音量レベルに応じて右側発光部34及び左側発光部35を発光させるようにしても良い。
【0074】
さらに上述した第1乃至第3の実施の形態においては、記憶部41に対し、6個の可動部に対応するそれぞれ複数種類の動きパターンデータを記憶するようにした場合について述べたが、本発明はこれに限らず、記憶部41には、6個の可動部に対応するそれぞれ動きパターンデータを各可動部に対して1種類ずつ記憶するようにしても良い。
【0075】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、記憶部41に記憶する6個の可動部に対応するそれぞれ複数種類の動きパターンデータに応じた動きで動くように、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたときに、例えば筐体右側回動部22を単に回転させたり、筐体左側開閉部25を一回だけ開閉させたり等の所定の動きをするように、主制御部40と駆動制御部43との間で設定しておいても良い。こうすることでロボット装置11は、記憶部41を必要としない分だけ構成を簡略化することができ、結果としてコストを抑えることができる。またこの場合、例えば音楽の第1の周波数帯域R1の第1の部分音量レベルが所定の閾値を越えたときに筐体右側回動部22を一方向に回転させ、次に音楽の第1の周波数帯域R1の第1の部分音量レベルが所定の閾値を越えたときに筐体右側回動部22を一方向とは逆の方向に回転させるようにして、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越える毎に6個の可動部の動きをトグルのように切り換えるようにしても良い。
【0076】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたときに6個の可動部を駆動制御するだけでなく、音量レベルに応じて6個の可動部の動きの速さを変更するようにしても良い。こうすることでロボット装置11は、あたかもロボット装置11自体が音楽の音量に同調した動きで踊っているかのように見せることができる。
【0077】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルが所定の閾値を越えたとき、6個の可動部を駆動制御するようにした場合について述べたが、本発明はこれに限らず、データ成分抽出部42の第1〜第6のフィルタ(F1〜F6)により音楽データから抽出された、第1〜第6のデータ成分(D1〜D6)の有無に応じて6個の可動部を駆動制御するようにしても良く、その場合も上述の実施例と同様の効果を得ることができる。
【0078】
さらに上述した第1乃至第3の実施の形態においては、外部に流れている音楽をマイク37で集音して音楽データを生成するようにした場合について述べたが、本発明はこれに限らず、音楽だけでなく、単なる人の声や物がぶつかる音、物が擦れる音などのように、音楽も含めた音声を集音して音声データを生成するようにしても良く、その場合も上述の実施例と同様の効果を得ることができる。
【0079】
さらに上述した第1乃至第3の実施の形態においては、音楽の周波数帯域毎の部分音量レベルのうち、低音に相当する周波数帯域の部分音量レベルのピークを検出することで音楽のビートを検出するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルのうち、どの周波数帯域の部分音量レベルのピークから音楽のビートを検出するようにしても良いし、音楽データを直接取得するようにして、かかる音楽データから検出される音楽全体の音量レベルのピークから音楽のビートを検出するようにしても良い。また、12音解析などの所定の解析方法を用いるようにしても良く、その場合、12音解析の解析結果から音楽の各音階に対して各可動部の動きを関連付けておくようにすることで、単音か和音(コード和音)かの違いに応じて、ロボット装置11に異なる動きをさせることができる。
【0080】
さらに上述した第1乃至第3の実施の形態においては、動きパターンによる動きが完了するまで(すなわち、動きパターンに対応する動き実行時間が過ぎるまで)の間に、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を再び越えたことを検出した場合には、現時点で実行中の動きが完了するまで継続するようにした場合について述べたが、本発明はこれに限らず、動きパターンによる動きが完了していなくても(すなわち、動きパターンに対応する動き実行時間が過ぎていなくても)、6個の可動部のうち同じ可動部に対応する周波数帯域の音量レベルが所定の閾値を越える毎に新たに動きを開始するように駆動制御しても良い。
【0081】
さらに上述した実施の形態においては、音楽の周波数帯域毎の部分音量レベルを所定時間(この場合1秒)毎に検出するようにした場合について述べたが、本発明はこれに限らず、音楽の周波数帯域毎の部分音量レベルを検出する時間は特に限定せずに、例えば、動きパターンデータの動き実行時間(この場合数秒)よりも長い時間であっても良い。そして、音楽の周波数帯域毎の部分音量レベルを検出する時間が、6軸分の可動部のそれぞれに対応する動きパターンデータの動き実行時間よりも長くなるように設定されていた場合、次の部分音量レベルを検出するまでの間に、かかる動きパターンデータに応じた動きを繰り返すようにしても良い。
【0082】
さらに上述した第1乃至第3の実施の形態においては、BPM120を基準のテンポとしてテンポ率を算出するようにした場合について述べたが、本発明はこれに限らず、最終的に、音楽のテンポに応じて6個の可動部の動きの速さを変化させることができるのであれば、音楽のテンポを直接テンポ率として用いても良く、音楽のテンポ率を算出して数値化する方法は限定しないし、そのときの基準のテンポ及びその表現方法も限定しない。
【0083】
さらに上述した第1乃至第3の実施の形態においては、ロボット装置11の6個の可動部のそれぞれの駆動用に、それぞれ1個又は2個のフィルタを対応付けるようにした場合について述べたが、本発明はこれに限らず、6個の可動部のそれぞれに対応付けるフィルタの数は限定しない。
【0084】
さらに上述した第1乃至第3の実施の形態においては、本発明による可動部駆動装置を、図1乃至図11について、略回転楕円体状の装置筐体を有する上述したロボット装置11に適用するようにした場合について述べたが、本発明はこれに限らず、外部に流れている音声を集音してその音楽に合わせて動く可動部を有するものであれば、球体状、円錐体状、円柱状、立方体状、直方体状、人型及び動物型のロボット装置や玩具であっても良い。
【0085】
さらに上述した第1乃至第3の実施の形態においては、本発明による可動部駆動装置を、図1乃至図11について、移動機構としての二輪を有する上述したロボット装置11に適用するようにした場合について述べたが、本発明はこれに限らず、移動機構を有するロボット装置や玩具であれば良く、移動機構としては一輪及び複数輪でも良いし、二足歩行型や四足歩行型等の多足歩行でも良いし、キャタピラ等であっても良い。
【0086】
さらに上述した第1乃至第3の実施の形態においては、略回転楕円体状の装置筐体として、図1乃至図11について上述した回転楕円体状筐体20を適用するようにした場合について述べたが、本発明はこれに限らず、球体状、円錐体状、円柱状、立方体状、直方体状、人型及び動物型でなる装置筐体を広く適用することができる。
【0087】
さらに上述した第1乃至第3の実施の形態においては、外部の音声を集音して音声データを生成する集音部として、図1乃至図11について上述したマイク37を適用するようにした場合について述べたが、具体的には、スピーカ一体型のマイクやダイナミックマイク、コンデンサマイク等、この他種々の構成でなる集音部を広く適用することができる。
【0088】
さらに上述した第1乃至第3の実施の形態においては、音声データから、音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部として、図1乃至図11について上述したデータ成分抽出部42を適用するようにした場合について述べたが、本発明はこれに限らず、主制御部40やフィルタ一体型の制御部等、この他種々の構成でなる抽出部を広く適用することができる。
【0089】
さらに上述した第1乃至第3の実施の形態においては、抽出部により抽出された、音声の所定の複数の周波数帯域毎のデータ成分に基づいて、複数の上記可動部のそれぞれを駆動制御する駆動制御部として、図1乃至図11について上述した駆動制御部43を適用するようにした場合について述べたが、本発明はこれに限らず、主制御部40や駆動制御部一体型の制御部等、この他種々の構成でなる駆動制御部を広く適用することができる。
【0090】
さらに上述した第1乃至第3の実施の形態においては、音声データから、当該音声データに基づく音声のビートを検出するビート検出部として、図1乃至図11について上述した主制御部40を適用するようにした場合について述べたが、本発明はこれに限らず、音声データから、当該音声データに基づく音声のビートを検出するハードウェア構成のビート検出回路等のように、この他種々のビート検出部を広く適用することができる。
【0091】
さらに上述した第1乃至第3の実施の形態においては、ビート検出部により検出されたビートから、当該音声データに基づく上記音声のテンポを検出するテンポ検出部として、図1乃至図11について上述した主制御部40を適用するようにした場合について述べたが、本発明はこれに限らず、ビート検出部により検出されたビートから、当該音声データに基づく上記音声のテンポを検出するハードウェア構成のテンポ検出回路等のように、この他種々のテンポ検出部を広く適用することができる。
【産業上の利用可能性】
【0092】
本発明は、音楽に合わせて動くロボット装置に利用することができる。
【図面の簡単な説明】
【0093】
【図1】本実施の形態による可動部駆動装置の概要を示すブロック図である。
【図2】ロボット装置の外観構成を示す略線的斜視図である。
【図3】ロボット装置の背面構成を示す略線図である。
【図4】筐体右側開閉部及び筐体左側開閉部の開閉の様子の説明に供する略線図である。
【図5】筐体右側回動部及び筐体左側回動部の回動の様子の説明に供する略線図である。
【図6】ロボット装置の回路構成を示すブロック図である。
【図7】データ成分抽出部の構成を示すブロック図である。
【図8】フィルタの周波数特性を示す略線図(1)である。
【図9】フィルタの周波数特性を示す略線図(2)である。
【図10】フィルタの周波数特性を示す略線図(3)である。
【図11】可動部駆動処理手順を示すフローチャートである。
【符号の説明】
【0094】
1……可動部駆動装置、2……装置筐体、3、22、23、24、25、30、31……可動部、4……集音部、5……抽出部、6…駆動制御部、10……音楽再生システム、11……ロボット装置、22……筐体右側回動部、23……筐体左側回動部、24……筐体右側開閉部、25……筐体左側開閉部、30……右側車輪、31……左側車輪、34……右側発光部、35……左側発光部、37……マイク、40……主制御部、41……記憶部、42……データ成分抽出部、43……駆動制御部、F1……第1のフィルタ、F2……第2のフィルタ、F3……第3のフィルタ、F4……第4のフィルタ、F5……第5のフィルタ、F6……第6のフィルタ、R1……第1の周波数帯域、R2……第2の周波数帯域、R3……第3の周波数帯域、R4……第4の周波数帯域、R5……第5の周波数帯域、R6……第6の周波数帯域、RT1…可動部駆動処理手順。
【特許請求の範囲】
【請求項1】
所定の動きで可動する複数の可動部と、
外部の音声を集音して音声データを生成する集音部と、
上記音声データから、上記音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部と、
上記抽出部により抽出された、上記音声の所定の複数の周波数帯域毎のデータ成分のそれぞれに基づいて、上記複数の可動部のそれぞれを駆動制御する駆動制御部と
を具えることを特徴とする可動部駆動装置。
【請求項2】
上記複数の可動部は、
所定の動きで回動する少なくとも2つの車輪を含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記車輪を含む上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項3】
上記複数の可動部は、
所定の動きで開閉する少なくとも1つの開閉部を含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記開閉部を含む上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項4】
所定の発光パターンで発光する発光部
を具え、
上記複数の可動部は、
所定の動きで回動する少なくとも2つの車輪と、所定の動きで開閉する少なくとも1つの開閉部と、所定の動きで回動する少なくとも1つの回動部とを含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記車輪と上記開閉部と上記回動部とを含む上記複数の可動部及び上記発光部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項5】
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、所定時間毎に上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項6】
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記所定時間内に、上記複数の可動部のそれぞれを複数回にわたって駆動制御する
ことを特徴とする請求項5に記載の可動部駆動装置。
【請求項7】
上記音声の所定の複数の上記周波数帯域の中には、第1の周波数帯域と、当該第1の周波数帯域と上記周波数帯域が重なる第2の周波数帯域とがあり、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記複数の可動部のそれぞれを駆動制御するとき、上記第1の周波数帯域のデータ成分に基づいて上記複数の可動部の中の第1の可動部を駆動制御すると共に、上記第2の周波数帯域のデータ成分に基づいて上記複数の可動部の中の第2の可動部を駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項8】
上記音声データから、当該音声データに基づく上記音声のビートを検出するビート検出部
を具え、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分と、上記ビート検出部により検出された上記音声の上記ビートとに基づいて、上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項9】
上記ビート検出部により検出された上記ビートから、当該音声データに基づく上記音声のテンポを検出するテンポ検出部
を具え、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分と、上記ビート検出部により検出された上記音声の上記ビートと、上記テンポ検出部により検出された上記音声の上記テンポとに基づいて、上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項8に記載の可動部駆動装置。
【請求項10】
外部の音声を集音して音声データを生成する音声データ生成ステップと、
上記音声データから、上記音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出ステップと、
上記音声の所定の複数の上記周波数帯域毎のデータ成分に基づいて、装置に設けられた複数の可動部のそれぞれを駆動制御する駆動制御ステップと
を具えることを特徴とする可動部駆動方法。
【請求項1】
所定の動きで可動する複数の可動部と、
外部の音声を集音して音声データを生成する集音部と、
上記音声データから、上記音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出部と、
上記抽出部により抽出された、上記音声の所定の複数の周波数帯域毎のデータ成分のそれぞれに基づいて、上記複数の可動部のそれぞれを駆動制御する駆動制御部と
を具えることを特徴とする可動部駆動装置。
【請求項2】
上記複数の可動部は、
所定の動きで回動する少なくとも2つの車輪を含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記車輪を含む上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項3】
上記複数の可動部は、
所定の動きで開閉する少なくとも1つの開閉部を含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記開閉部を含む上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項4】
所定の発光パターンで発光する発光部
を具え、
上記複数の可動部は、
所定の動きで回動する少なくとも2つの車輪と、所定の動きで開閉する少なくとも1つの開閉部と、所定の動きで回動する少なくとも1つの回動部とを含み、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記車輪と上記開閉部と上記回動部とを含む上記複数の可動部及び上記発光部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項5】
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、所定時間毎に上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項6】
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記所定時間内に、上記複数の可動部のそれぞれを複数回にわたって駆動制御する
ことを特徴とする請求項5に記載の可動部駆動装置。
【請求項7】
上記音声の所定の複数の上記周波数帯域の中には、第1の周波数帯域と、当該第1の周波数帯域と上記周波数帯域が重なる第2の周波数帯域とがあり、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分のそれぞれに基づいて、上記複数の可動部のそれぞれを駆動制御するとき、上記第1の周波数帯域のデータ成分に基づいて上記複数の可動部の中の第1の可動部を駆動制御すると共に、上記第2の周波数帯域のデータ成分に基づいて上記複数の可動部の中の第2の可動部を駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項8】
上記音声データから、当該音声データに基づく上記音声のビートを検出するビート検出部
を具え、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分と、上記ビート検出部により検出された上記音声の上記ビートとに基づいて、上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項1に記載の可動部駆動装置。
【請求項9】
上記ビート検出部により検出された上記ビートから、当該音声データに基づく上記音声のテンポを検出するテンポ検出部
を具え、
上記駆動制御部は、
上記抽出部により抽出された、上記音声の所定の複数の上記周波数帯域毎のデータ成分と、上記ビート検出部により検出された上記音声の上記ビートと、上記テンポ検出部により検出された上記音声の上記テンポとに基づいて、上記複数の可動部のそれぞれを駆動制御する
ことを特徴とする請求項8に記載の可動部駆動装置。
【請求項10】
外部の音声を集音して音声データを生成する音声データ生成ステップと、
上記音声データから、上記音声の所定の複数の周波数帯域毎のデータ成分を抽出する抽出ステップと、
上記音声の所定の複数の上記周波数帯域毎のデータ成分に基づいて、装置に設けられた複数の可動部のそれぞれを駆動制御する駆動制御ステップと
を具えることを特徴とする可動部駆動方法。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2008−119135(P2008−119135A)
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願番号】特願2006−304327(P2006−304327)
【出願日】平成18年11月9日(2006.11.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成20年5月29日(2008.5.29)
【国際特許分類】
【出願日】平成18年11月9日(2006.11.9)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]