
可変のタービン幾何学配置を備える過給機用のタービンの終端位置を調節するための方法および装置
【課題】従来は、調節可能な機械式ストッパによってそれぞれのターボチャージャーについて個別に調節されてたが、アクチュエータによって調節可能な案内羽根の終端位置設定を可能にする。
【解決手段】エンジンシステム内の過給機のタービン51に設けられた、アクチュエータ14によって調節可能な案内羽根12の終端位置を調節するための方法において、終端位置を、構造的に制限されたエンドストッパの位置に関係させ、所定のガス流量を有するタービン51の案内羽根12の位置に一致させ、案内羽根12を終端位置に設定するために、案内羽根12を終端位置に保持する所定の位置値によってアクチュエータ14を制御する。
【解決手段】エンジンシステム内の過給機のタービン51に設けられた、アクチュエータ14によって調節可能な案内羽根12の終端位置を調節するための方法において、終端位置を、構造的に制限されたエンドストッパの位置に関係させ、所定のガス流量を有するタービン51の案内羽根12の位置に一致させ、案内羽根12を終端位置に設定するために、案内羽根12を終端位置に保持する所定の位置値によってアクチュエータ14を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関用の過給機、特に排ガスによって駆動されるターボチャージャーに関する。本発明は、さらに可変のタービン幾何学配置を備えるターボチャージャーのタービンのための調節器の最終位置を設定するための手段に関する。
【背景技術】
【0002】
内燃機関では極めて頻繁に過給機、特に排ガスによって駆動されるターボチャージャーが用いられている。これらのいわゆる「排ガス・ターボチャージャー」の排ガス管にはタービンが設けられており、そこで流れる排ガス流の排ガスエンタルピーは、コンプレッサを駆動するための機械的エネルギーに変換される。タービンは調節可能な案内羽根を有し、案内羽根の位置は、機械的エネルギーに変換された排ガスエンタルピーの効率を規定する。
【0003】
欧州特許出願公開第2208863号明細書により、可変のタービン幾何学配置を備えるターボチャージャーが既知であり、このターボチャージャーでは案内羽根が第1終端位置と第2終端位置との間で変位可能である。このために、案内羽根の調節運動は機械式ストッパにより制限され、ストッパは、第1終端位置では最小排ガス流量のために案内羽根の位置を規定し、第2終端位置では最大排ガス流量のために案内羽根の位置を規定している。これまでは最小排ガス流量は、調節可能な機械式ストッパによってそれぞれのターボチャージャーについて個別に調節されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許出願公開第2208863号明細書
【発明の概要】
【0005】
本発明によれば、請求項1に記載の内燃機関のための過給機でタービンの案内羽根の終端位置を調節するための方法ならびに従属請求項に記載の装置およびエンジンシステムが提供される。
【0006】
本発明の他の有利な構成が従属請求項に記載されている。
【0007】
第1の態様によれば、エンジンシステム内の過給機のタービンにおける案内羽根の終端位置を調節するための方法が提供され、案内羽根はアクチュエータによって調節可能であり;終端位置は、構造的に制限されたエンドストッパの位置に関係しており、機械的な遮断により規定されており、タービンの案内羽根の終端位置は所定のガス流量に対応しており、案内羽根を終端位置に設定するためには、アクチュエータが案内羽根を終端位置に保持する所定の位置値によって制御される。
【0008】
排ガスによって駆動される過給機用タービンでは、一般に案内羽根のための調節器の終端位置は最小排ガス流量のために規定されている。最小ガス流量のための終端位置の設定プロセスは、特に過渡的な状況で排ガス再循環制御および/または空気質量もしくは過給圧調整のためのフィードフォワード制御に影響を及ぼすので不可欠である。
【0009】
調節ステップにより最小ガス流量のための終端位置をそれぞれのタービンのために機械的および個別に設定する代わりに、構造的に制限された機械的エンドストッパでは案内羽根の位置に基づいて制御装置の関連終端位置が規定される。構造的に制限された機械的エンドストッパでは、案内羽根は、終端位置のために必要な最小ガス流量よりもわずかなガス流量を有する所定位置に位置する。
【0010】
さらに、方法は広範囲に自動的に実施することができ、これまで不可欠であったようにタービン個別に調節しなければならない変位可能な機械式ストッパによる調節作業が不要となる。さらに制御装置で終端位置を規則的に設定することにより、老朽化による摩耗、ひいては老朽化による最小ガス流量の変化を考慮することができる。このようなことは、変位可能な機械式ストッパを使用した場合には不可能であった。
【0011】
さらに終端位置は、構造的に制限された2つのエンドストッパの間に位置する案内羽根の位置と一致させてもよい。
【0012】
案内羽根を終端位置に設定するためにアクチュエータが所定の調節値によって制御され、案内羽根は2つの移動方向の変位に抗してアクチュエータにより保持される。
【0013】
一実施形態によれば、所定の位置値は次のステップ:
タービンの案内羽根をエンドストッパに移動するステップと;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出するステップと;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出するステップと;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を提供するステップと
によって検出することができる。
【0014】
所定のガス流量のための終端位置としての役目を果たすべき位置は、したがって調節プロセスによって検出することができ、これにより位置値が生じ、この調節値だけ、案内羽根のための調節器がエンドストッパによって規定された位置から第2終端位置(最大ガス流量のための終端位置)の方向に移動させられ、所定のガス流量のための終端位置が得られる。
【0015】
さらに、老朽化-位置値に関係して所定の位置値を供給することもでき、老朽化-位置値は終端位置-位置値の時間変化を考慮している。
【0016】
特に、複数の位置値の平均値として終端位置-位置値を検出することもでき、それぞれの位置値は、所定の作用点で所定のガス流量が得られる、案内羽根の所定位置における位置値として検出される。
【0017】
別の態様によれば、エンジンシステム内の過給機のタービンにおける案内羽根の終端位置を調節するための装置が設けられており、案内羽根はアクチュエータによって調節可能であり、タービンの案内羽根の終端位置は所定のガス流量に対応し、装置は、案内羽根を終端位置に設定するために終端位置に案内羽根を保持する所定の調節値によってアクチュエータを制御するように構成されている。
【0018】
さらに、装置は、
タービンの案内羽根をエンドストッパに移動し;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出し;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出し;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を供給するように構成されている。
【0019】
別の態様によれば、
過給機を備え、過給機が、変位可能な案内羽根を備えるタービンを有する内燃機関と、
上記装置と
を備えるエンジンシステムが設けられている。
【0020】
次に本発明の好ましい実施形態を添付の図面に基づき詳細に説明する。
【図面の簡単な説明】
【0021】
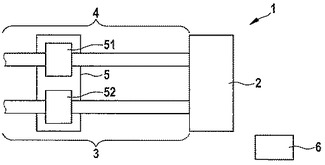
【図1】排ガスにより駆動される過給機を備えるエンジンシステムの概略図である。
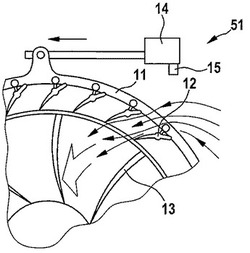
【図2】排ガスにより駆動される過給機のタービンの案内羽根を示す横断面図である。
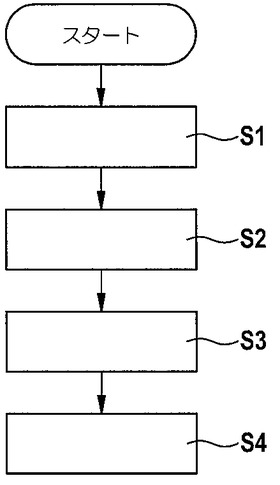
【図3】可変のタービン幾何学配置を備えるタービンを調節するための方法を示すフロー図である。
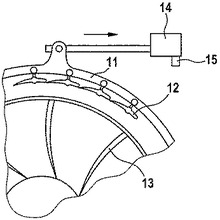
【図4】排ガスにより駆動される過給機のタービンの案内羽根を当接位置で示す横断面図である。
【図5】排ガスにより駆動される過給機のタービンの案内羽根を、最小ガス流量のための終端位置で示す横断面図である。
【発明を実施するための形態】
【0022】
図1は、例えば、ディーゼルエンジンまたはオットーエンジンなどの内燃機関2を概略的に示す。内燃機関2には空気供給部3を介して空気が供給される。内燃機関2から放出された燃焼排ガスは、排ガス排出部4を介して排出される。
【0023】
過給機5が設けられており、過給機5は排ガス排出部4にタービン51を備える。タービン51は、排ガス排出部4により案内された燃焼排ガスの排ガスエンタルピーを機械エネルギーに変換するための役割を果たす。タービン51は空気供給部3のコンプレッサ52に機械的に連結されており、これにより、コンプレッサ52が駆動される。
【0024】
コンプレッサ52は、周辺から外気を吸い込み、空気供給部3の過給圧により外気を提供するための役割を果たす。コンプレッサ52に供給される機械的エネルギーは、一方では実質的に内燃機関2の作用点に関係して提供された排ガスエンタルピーによって決定され、他方ではタービン51の内部の案内羽根の位置によって規定される。
【0025】
実質的に、案内羽根の位置は、過給機の作用度、すなわち、コンプレッサ52を駆動するための機械的なエネルギーに変換される、燃焼排ガス中に含有される排ガスエンタルピーの割合を規定する。
【0026】
さらに外部規定、および、センサにより検出され、モデル化された状態変数にしたがって、エンジンシステム1の作動を制御する制御ユニット6が設けられている。制御ユニット6は、タービン51の案内羽根の位置も制御し、これにより、過給機5の作用度を規定し、過給圧調整などを行う。
【0027】
図2には、排ガスにより作動される過給機5のためのタービン51の横断面図の一部が概略的に示されている。図示しないタービンケーシングに対して旋回可能な変位部材11が示されている。タービンケーシングには案内羽根12が配置されている。さらに案内羽根12は変位部材11に連結されており、これにより、タービンケーシングに対する変位部材11の相対変位が案内羽根12の旋回運動をもたらす。変位部材11の変位は、空圧式または電気式の調節器として構成されていてもよいアクチュエータ14によって引き起こされる。案内羽根12は、タービン51の内部に配置されたタービン羽根13におけるガス流を制御するために周方向に配置されている。アクチュエータ14は、さらに位置センサ15に接続されており、これにより、案内羽根12のそれぞれの位置に、対応した位置値が割り当てられる。
【0028】
排ガス・ターボチャージャー5の作動時には、2つの終端位置の間で案内羽根12が旋回される。第1終端位置は、エンジンシステム1の所定の作用点でタービン51によって所定の最小ガス流量が得られる位置と一致する。案内羽根12の第2終端位置は、タービン51によって所定の最大ガス流量が得られる位置と一致する。
【0029】
最小ガス流量のための第1終端位置を設けることは不可欠である。なぜなら、これは特に過渡状態における排ガス再循環のフィードフォワード制御または空気質量もしくは過給圧調整に影響を及ぼすからである。これにより、酸化窒素および粒子排出との直接的な関係が生じる。
【0030】
さらに排ガス背圧に影響が及ぼされる。最小ガス流量の誤った調節もしくは老朽化によるパラメータの誤った適合により排ガス背圧が上昇した場合にはガス交換損失も高まる。
【0031】
したがって、最小ガス流量のための第1終端位置を正確に設定し、第1終端位置に案内羽根12を移動できることが不可欠である。第1終端位置を決定するためにエンジン毎に調節しなければならない機械的な当接を防止するためには、案内羽根12の第1終端位置に関する情報を制御装置6に記憶し、必要に応じで呼び出すように構成されている。
【0032】
第1終端位置に関する情報の検出を、図3のフロー図にしたがって可変のタービン幾何学配置を備えるタービン51を適合させるための方法に基づいて説明する。ステップS1では、エンジン惰性走行時にタービン51の案内羽根12が完全に閉じられる。すなわち、案内羽根12が相互に接触する機械的、構造的に制限されたエンドストッパまで案内羽根12が移動される。案内ばね12は相互に接触しているので、閉鎖位置の方向に案内羽根12がさらに移動することは阻止される。第1エンドストッパは一般に任意であり、ゼロまたは第1終端位置に関して設けたガス流量よりも小さい値のガス流量をもたらす。
【0033】
図4は、可能な実施例において、案内羽根12が構造的に制限されたエンドストッパに移動された場合に設定される案内羽根12の位置を示す。この場合、案内羽根12は、隣接する案内羽根12に接触するか、もしくはこれと重なる位置をとり、これにより、最大限の流体抵抗を引き起こす。
【0034】
位置センサ15によって、第1エンドストッパにおける案内羽根12の位置が検出され、適宜なエンドストッパ位置値X0が制御装置に記憶される(ステップS2)。このエンドストッパ位置値X0は、過給機が老朽化していない場合には、構成部品および製作許容差からのみ生じるわずかなばらつきしか有していない。第1エンドストッパの位置の検出は、複数の過給機5の測定に基づいて行うこともでき、この場合、検出されたエンドストッパ位置値X0は平均化される。
【0035】
ステップS3では、最小ガス流量のための望ましい位置値が制御装置で値xの形で決定される。値xは、流れ作業における膨大な所定数量のタービン51の測定から得られる。測定は、タービン51の作用点があらかじめ規定されている場合、例えば、所定のタービン回転数および所定のガス差圧で行われ、ガス流量の継続的な測定により所望のガス流量が得られるまで案内羽根12の調節が行われる。
【0036】
第1終端位置に到達させるためには、案内ばね12のためのアクチュエータ14を情報X0+xにしたがって制御することができる。案内羽根12が第1終端位置に位置するタービン51が図5に横断面図で示されている。
【0037】
第1エンドストッパの代わりに、第2エンドストッパの位置に到達させ、測定することもできる。最小ガス流量のための所望の位置値は、第2エンドストッパを起点として検出することができる。
【0038】
付加的に、Λx(t)の補正値を考慮してもよい。補正値Λx(t)は、過給機5の耐用寿命にわたる摩耗状態に関係している。このため、流れ作業で測定した統計的に膨大な数量の異なる程度に老朽化したターボチャージャーに基づいて、時間に関係した補正関数Λx(t)を検出することができる。
【0039】
ステップS4では、制御装置6によって要求された場合に、案内羽根12が第1終端位置に到達する。同時に、案内羽根12が学習させた終端位置と第1エンドストッパとの間の位置をとることは防止される。
【0040】
エンドストッパX0の位置は、例えばエンジン惰性装置時に規則的な間隔をおいて学習させることができる。これは、過給機5の温度ができるだけ均一な場合に行うことが望ましい。このための開始点としては、例えば、エンジン温度またはオイル温度(例えば内燃機関2の停止後10分)を使用することができる。
【符号の説明】
【0041】
1 エンジンシステム
2 内燃機関
3 空気供給部
4 排ガス吐出部
5 過給機
11 変位部材
12 案内羽根
14 アクチュエータ
51 タービン
【技術分野】
【0001】
本発明は、内燃機関用の過給機、特に排ガスによって駆動されるターボチャージャーに関する。本発明は、さらに可変のタービン幾何学配置を備えるターボチャージャーのタービンのための調節器の最終位置を設定するための手段に関する。
【背景技術】
【0002】
内燃機関では極めて頻繁に過給機、特に排ガスによって駆動されるターボチャージャーが用いられている。これらのいわゆる「排ガス・ターボチャージャー」の排ガス管にはタービンが設けられており、そこで流れる排ガス流の排ガスエンタルピーは、コンプレッサを駆動するための機械的エネルギーに変換される。タービンは調節可能な案内羽根を有し、案内羽根の位置は、機械的エネルギーに変換された排ガスエンタルピーの効率を規定する。
【0003】
欧州特許出願公開第2208863号明細書により、可変のタービン幾何学配置を備えるターボチャージャーが既知であり、このターボチャージャーでは案内羽根が第1終端位置と第2終端位置との間で変位可能である。このために、案内羽根の調節運動は機械式ストッパにより制限され、ストッパは、第1終端位置では最小排ガス流量のために案内羽根の位置を規定し、第2終端位置では最大排ガス流量のために案内羽根の位置を規定している。これまでは最小排ガス流量は、調節可能な機械式ストッパによってそれぞれのターボチャージャーについて個別に調節されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】欧州特許出願公開第2208863号明細書
【発明の概要】
【0005】
本発明によれば、請求項1に記載の内燃機関のための過給機でタービンの案内羽根の終端位置を調節するための方法ならびに従属請求項に記載の装置およびエンジンシステムが提供される。
【0006】
本発明の他の有利な構成が従属請求項に記載されている。
【0007】
第1の態様によれば、エンジンシステム内の過給機のタービンにおける案内羽根の終端位置を調節するための方法が提供され、案内羽根はアクチュエータによって調節可能であり;終端位置は、構造的に制限されたエンドストッパの位置に関係しており、機械的な遮断により規定されており、タービンの案内羽根の終端位置は所定のガス流量に対応しており、案内羽根を終端位置に設定するためには、アクチュエータが案内羽根を終端位置に保持する所定の位置値によって制御される。
【0008】
排ガスによって駆動される過給機用タービンでは、一般に案内羽根のための調節器の終端位置は最小排ガス流量のために規定されている。最小ガス流量のための終端位置の設定プロセスは、特に過渡的な状況で排ガス再循環制御および/または空気質量もしくは過給圧調整のためのフィードフォワード制御に影響を及ぼすので不可欠である。
【0009】
調節ステップにより最小ガス流量のための終端位置をそれぞれのタービンのために機械的および個別に設定する代わりに、構造的に制限された機械的エンドストッパでは案内羽根の位置に基づいて制御装置の関連終端位置が規定される。構造的に制限された機械的エンドストッパでは、案内羽根は、終端位置のために必要な最小ガス流量よりもわずかなガス流量を有する所定位置に位置する。
【0010】
さらに、方法は広範囲に自動的に実施することができ、これまで不可欠であったようにタービン個別に調節しなければならない変位可能な機械式ストッパによる調節作業が不要となる。さらに制御装置で終端位置を規則的に設定することにより、老朽化による摩耗、ひいては老朽化による最小ガス流量の変化を考慮することができる。このようなことは、変位可能な機械式ストッパを使用した場合には不可能であった。
【0011】
さらに終端位置は、構造的に制限された2つのエンドストッパの間に位置する案内羽根の位置と一致させてもよい。
【0012】
案内羽根を終端位置に設定するためにアクチュエータが所定の調節値によって制御され、案内羽根は2つの移動方向の変位に抗してアクチュエータにより保持される。
【0013】
一実施形態によれば、所定の位置値は次のステップ:
タービンの案内羽根をエンドストッパに移動するステップと;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出するステップと;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出するステップと;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を提供するステップと
によって検出することができる。
【0014】
所定のガス流量のための終端位置としての役目を果たすべき位置は、したがって調節プロセスによって検出することができ、これにより位置値が生じ、この調節値だけ、案内羽根のための調節器がエンドストッパによって規定された位置から第2終端位置(最大ガス流量のための終端位置)の方向に移動させられ、所定のガス流量のための終端位置が得られる。
【0015】
さらに、老朽化-位置値に関係して所定の位置値を供給することもでき、老朽化-位置値は終端位置-位置値の時間変化を考慮している。
【0016】
特に、複数の位置値の平均値として終端位置-位置値を検出することもでき、それぞれの位置値は、所定の作用点で所定のガス流量が得られる、案内羽根の所定位置における位置値として検出される。
【0017】
別の態様によれば、エンジンシステム内の過給機のタービンにおける案内羽根の終端位置を調節するための装置が設けられており、案内羽根はアクチュエータによって調節可能であり、タービンの案内羽根の終端位置は所定のガス流量に対応し、装置は、案内羽根を終端位置に設定するために終端位置に案内羽根を保持する所定の調節値によってアクチュエータを制御するように構成されている。
【0018】
さらに、装置は、
タービンの案内羽根をエンドストッパに移動し;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出し;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出し;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を供給するように構成されている。
【0019】
別の態様によれば、
過給機を備え、過給機が、変位可能な案内羽根を備えるタービンを有する内燃機関と、
上記装置と
を備えるエンジンシステムが設けられている。
【0020】
次に本発明の好ましい実施形態を添付の図面に基づき詳細に説明する。
【図面の簡単な説明】
【0021】
【図1】排ガスにより駆動される過給機を備えるエンジンシステムの概略図である。
【図2】排ガスにより駆動される過給機のタービンの案内羽根を示す横断面図である。
【図3】可変のタービン幾何学配置を備えるタービンを調節するための方法を示すフロー図である。
【図4】排ガスにより駆動される過給機のタービンの案内羽根を当接位置で示す横断面図である。
【図5】排ガスにより駆動される過給機のタービンの案内羽根を、最小ガス流量のための終端位置で示す横断面図である。
【発明を実施するための形態】
【0022】
図1は、例えば、ディーゼルエンジンまたはオットーエンジンなどの内燃機関2を概略的に示す。内燃機関2には空気供給部3を介して空気が供給される。内燃機関2から放出された燃焼排ガスは、排ガス排出部4を介して排出される。
【0023】
過給機5が設けられており、過給機5は排ガス排出部4にタービン51を備える。タービン51は、排ガス排出部4により案内された燃焼排ガスの排ガスエンタルピーを機械エネルギーに変換するための役割を果たす。タービン51は空気供給部3のコンプレッサ52に機械的に連結されており、これにより、コンプレッサ52が駆動される。
【0024】
コンプレッサ52は、周辺から外気を吸い込み、空気供給部3の過給圧により外気を提供するための役割を果たす。コンプレッサ52に供給される機械的エネルギーは、一方では実質的に内燃機関2の作用点に関係して提供された排ガスエンタルピーによって決定され、他方ではタービン51の内部の案内羽根の位置によって規定される。
【0025】
実質的に、案内羽根の位置は、過給機の作用度、すなわち、コンプレッサ52を駆動するための機械的なエネルギーに変換される、燃焼排ガス中に含有される排ガスエンタルピーの割合を規定する。
【0026】
さらに外部規定、および、センサにより検出され、モデル化された状態変数にしたがって、エンジンシステム1の作動を制御する制御ユニット6が設けられている。制御ユニット6は、タービン51の案内羽根の位置も制御し、これにより、過給機5の作用度を規定し、過給圧調整などを行う。
【0027】
図2には、排ガスにより作動される過給機5のためのタービン51の横断面図の一部が概略的に示されている。図示しないタービンケーシングに対して旋回可能な変位部材11が示されている。タービンケーシングには案内羽根12が配置されている。さらに案内羽根12は変位部材11に連結されており、これにより、タービンケーシングに対する変位部材11の相対変位が案内羽根12の旋回運動をもたらす。変位部材11の変位は、空圧式または電気式の調節器として構成されていてもよいアクチュエータ14によって引き起こされる。案内羽根12は、タービン51の内部に配置されたタービン羽根13におけるガス流を制御するために周方向に配置されている。アクチュエータ14は、さらに位置センサ15に接続されており、これにより、案内羽根12のそれぞれの位置に、対応した位置値が割り当てられる。
【0028】
排ガス・ターボチャージャー5の作動時には、2つの終端位置の間で案内羽根12が旋回される。第1終端位置は、エンジンシステム1の所定の作用点でタービン51によって所定の最小ガス流量が得られる位置と一致する。案内羽根12の第2終端位置は、タービン51によって所定の最大ガス流量が得られる位置と一致する。
【0029】
最小ガス流量のための第1終端位置を設けることは不可欠である。なぜなら、これは特に過渡状態における排ガス再循環のフィードフォワード制御または空気質量もしくは過給圧調整に影響を及ぼすからである。これにより、酸化窒素および粒子排出との直接的な関係が生じる。
【0030】
さらに排ガス背圧に影響が及ぼされる。最小ガス流量の誤った調節もしくは老朽化によるパラメータの誤った適合により排ガス背圧が上昇した場合にはガス交換損失も高まる。
【0031】
したがって、最小ガス流量のための第1終端位置を正確に設定し、第1終端位置に案内羽根12を移動できることが不可欠である。第1終端位置を決定するためにエンジン毎に調節しなければならない機械的な当接を防止するためには、案内羽根12の第1終端位置に関する情報を制御装置6に記憶し、必要に応じで呼び出すように構成されている。
【0032】
第1終端位置に関する情報の検出を、図3のフロー図にしたがって可変のタービン幾何学配置を備えるタービン51を適合させるための方法に基づいて説明する。ステップS1では、エンジン惰性走行時にタービン51の案内羽根12が完全に閉じられる。すなわち、案内羽根12が相互に接触する機械的、構造的に制限されたエンドストッパまで案内羽根12が移動される。案内ばね12は相互に接触しているので、閉鎖位置の方向に案内羽根12がさらに移動することは阻止される。第1エンドストッパは一般に任意であり、ゼロまたは第1終端位置に関して設けたガス流量よりも小さい値のガス流量をもたらす。
【0033】
図4は、可能な実施例において、案内羽根12が構造的に制限されたエンドストッパに移動された場合に設定される案内羽根12の位置を示す。この場合、案内羽根12は、隣接する案内羽根12に接触するか、もしくはこれと重なる位置をとり、これにより、最大限の流体抵抗を引き起こす。
【0034】
位置センサ15によって、第1エンドストッパにおける案内羽根12の位置が検出され、適宜なエンドストッパ位置値X0が制御装置に記憶される(ステップS2)。このエンドストッパ位置値X0は、過給機が老朽化していない場合には、構成部品および製作許容差からのみ生じるわずかなばらつきしか有していない。第1エンドストッパの位置の検出は、複数の過給機5の測定に基づいて行うこともでき、この場合、検出されたエンドストッパ位置値X0は平均化される。
【0035】
ステップS3では、最小ガス流量のための望ましい位置値が制御装置で値xの形で決定される。値xは、流れ作業における膨大な所定数量のタービン51の測定から得られる。測定は、タービン51の作用点があらかじめ規定されている場合、例えば、所定のタービン回転数および所定のガス差圧で行われ、ガス流量の継続的な測定により所望のガス流量が得られるまで案内羽根12の調節が行われる。
【0036】
第1終端位置に到達させるためには、案内ばね12のためのアクチュエータ14を情報X0+xにしたがって制御することができる。案内羽根12が第1終端位置に位置するタービン51が図5に横断面図で示されている。
【0037】
第1エンドストッパの代わりに、第2エンドストッパの位置に到達させ、測定することもできる。最小ガス流量のための所望の位置値は、第2エンドストッパを起点として検出することができる。
【0038】
付加的に、Λx(t)の補正値を考慮してもよい。補正値Λx(t)は、過給機5の耐用寿命にわたる摩耗状態に関係している。このため、流れ作業で測定した統計的に膨大な数量の異なる程度に老朽化したターボチャージャーに基づいて、時間に関係した補正関数Λx(t)を検出することができる。
【0039】
ステップS4では、制御装置6によって要求された場合に、案内羽根12が第1終端位置に到達する。同時に、案内羽根12が学習させた終端位置と第1エンドストッパとの間の位置をとることは防止される。
【0040】
エンドストッパX0の位置は、例えばエンジン惰性装置時に規則的な間隔をおいて学習させることができる。これは、過給機5の温度ができるだけ均一な場合に行うことが望ましい。このための開始点としては、例えば、エンジン温度またはオイル温度(例えば内燃機関2の停止後10分)を使用することができる。
【符号の説明】
【0041】
1 エンジンシステム
2 内燃機関
3 空気供給部
4 排ガス吐出部
5 過給機
11 変位部材
12 案内羽根
14 アクチュエータ
51 タービン
【特許請求の範囲】
【請求項1】
エンジンシステム(1)内の過給機(5)のタービン(51)における案内羽根(12)の終端位置を調節するための方法において、
案内羽根(12)をアクチュエータ(14)によって調節可能にし、
終端位置を、構造的に制限されたエンドストッパの位置に関係させ、所定のガス流量を有するタービン(51)の案内羽根(12)の位置と一致させ、
案内羽根(12)を終端位置に設定するために、案内羽根(12)を終端位置に保持する所定の位置値によってアクチュエータ(14)を制御する、方法。
【請求項2】
終端位置を、構造的に制限された2つのエンドストッパの間の案内羽根(12)の位置一致させる、請求項1または2に記載の方法。
【請求項3】
案内羽根(12)を終端位置に設定するために、アクチュエータ(14)を所定の位置値によって制御し、アクチュエータ(14)によって2つの移動方向の変位に抗して案内羽根(12)を保持する、請求項1または2に記載の方法。
【請求項4】
次のステップ:
タービン(51)の案内羽根(12)を機械的な遮断によって規定されたエンドストッパに移動するステップと;
エンドストッパにおける案内羽根(12)の位置に割り当てられたエンドストッパ位置値を検出するステップと;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出するステップと;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を提供するステップと
によって所定の位置値を検出する、請求項1から3までのいずれか一項に記載の方法。
【請求項5】
終端位置-位置値の時間変化を考慮した老朽化-位置値に関係して所定の位置値を供給する、請求項4に記載の方法。
【請求項6】
複数の位置値の平均値として終端位置-位置値を検出し、それぞれの位置値を、所定の作用点で所定のガス流量が得られる、案内羽根(12)の所定位置における位置値として規定する、請求項4または5に記載の方法。
【請求項7】
エンジンシステム(1)内の過給機(5)のタービン(51)における案内羽根(12)の終端位置を調節するための装置において、
案内羽根(12)がアクチュエータ(14)によって調節可能であり、終端位置が、所定のガス流量を有するタービン(51)の案内羽根(12)の位置に一致しており、装置が、案内羽根(12)を終端位置に設定するために終端位置に案内羽根(12)を保持する所定の調節値によってアクチュエータを制御するように構成されている、装置。
【請求項8】
タービン(51)の案内羽根(12)をエンドストッパに移動し;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出し;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出し;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を供給するように構成されている、請求項7に記載の装置。
【請求項9】
過給機(5)を有し、過給機が、変位可能な案内羽根(12)を有するタービン(51)を備える内燃機関(2)と、
請求項7または8に記載の装置と
を備える、エンジンシステム(1)
【請求項1】
エンジンシステム(1)内の過給機(5)のタービン(51)における案内羽根(12)の終端位置を調節するための方法において、
案内羽根(12)をアクチュエータ(14)によって調節可能にし、
終端位置を、構造的に制限されたエンドストッパの位置に関係させ、所定のガス流量を有するタービン(51)の案内羽根(12)の位置と一致させ、
案内羽根(12)を終端位置に設定するために、案内羽根(12)を終端位置に保持する所定の位置値によってアクチュエータ(14)を制御する、方法。
【請求項2】
終端位置を、構造的に制限された2つのエンドストッパの間の案内羽根(12)の位置一致させる、請求項1または2に記載の方法。
【請求項3】
案内羽根(12)を終端位置に設定するために、アクチュエータ(14)を所定の位置値によって制御し、アクチュエータ(14)によって2つの移動方向の変位に抗して案内羽根(12)を保持する、請求項1または2に記載の方法。
【請求項4】
次のステップ:
タービン(51)の案内羽根(12)を機械的な遮断によって規定されたエンドストッパに移動するステップと;
エンドストッパにおける案内羽根(12)の位置に割り当てられたエンドストッパ位置値を検出するステップと;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出するステップと;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を提供するステップと
によって所定の位置値を検出する、請求項1から3までのいずれか一項に記載の方法。
【請求項5】
終端位置-位置値の時間変化を考慮した老朽化-位置値に関係して所定の位置値を供給する、請求項4に記載の方法。
【請求項6】
複数の位置値の平均値として終端位置-位置値を検出し、それぞれの位置値を、所定の作用点で所定のガス流量が得られる、案内羽根(12)の所定位置における位置値として規定する、請求項4または5に記載の方法。
【請求項7】
エンジンシステム(1)内の過給機(5)のタービン(51)における案内羽根(12)の終端位置を調節するための装置において、
案内羽根(12)がアクチュエータ(14)によって調節可能であり、終端位置が、所定のガス流量を有するタービン(51)の案内羽根(12)の位置に一致しており、装置が、案内羽根(12)を終端位置に設定するために終端位置に案内羽根(12)を保持する所定の調節値によってアクチュエータを制御するように構成されている、装置。
【請求項8】
タービン(51)の案内羽根(12)をエンドストッパに移動し;
エンドストッパにおける案内羽根の位置に割り当てられたエンドストッパ位置値を検出し;
エンドストッパと終端位置とのずれを表す終端位置-位置値を検出し;
エンドストッパ位置値および終端位置-位置値に関係して所定の位置値を供給するように構成されている、請求項7に記載の装置。
【請求項9】
過給機(5)を有し、過給機が、変位可能な案内羽根(12)を有するタービン(51)を備える内燃機関(2)と、
請求項7または8に記載の装置と
を備える、エンジンシステム(1)
【図1】


【図2】

【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−83257(P2013−83257A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2012−223068(P2012−223068)
【出願日】平成24年10月5日(2012.10.5)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成24年10月5日(2012.10.5)
【出願人】(591245473)ロベルト・ボッシュ・ゲゼルシャフト・ミト・ベシュレンクテル・ハフツング (591)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【Fターム(参考)】
[ Back to top ]