
可変タイミングガソリンエンジンにおいてシリンダ内に取り込まれる気体の質量を制御する方法

【課題】可変タイミングガソリンエンジンのシリンダ内に取り込まれる気体の質量を制御する。
【解決手段】シリンダ内に取り込まれる空気の質量の設定点と、シリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される。これらの設定点を達成するために、吸気圧力の設定点が可変タイミングアクチュエータの位置の計測値と空気の質量の設定点とから生成され、2つの可変タイミングアクチュエータの各々の位置の設定点が吸気圧力の計測値と燃焼した気体の質量の設定点とから生成され、最後に、吸気スロットルと2つの可変タイミングアクチュエータとは吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とが達成されるように制御される。
【解決手段】シリンダ内に取り込まれる空気の質量の設定点と、シリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される。これらの設定点を達成するために、吸気圧力の設定点が可変タイミングアクチュエータの位置の計測値と空気の質量の設定点とから生成され、2つの可変タイミングアクチュエータの各々の位置の設定点が吸気圧力の計測値と燃焼した気体の質量の設定点とから生成され、最後に、吸気スロットルと2つの可変タイミングアクチュエータとは吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とが達成されるように制御される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はエンジン制御に関し、特に、可変タイミングガソリンエンジンにおけるシリンダ内に取り込まれる気体の質量の制御に関する。
【背景技術】
【0002】
ガソリンエンジンの燃料消費と排気とに関する制約が、ガソリンエンジンに際だった変化を引き起こしている。小型化は最も有望な解決策のように思える。実際に、小型化によって、エンジンの複数の動作ポイントをより効率の高い領域にシフトさせること(ポンピングロスの低減)が可能になる。そして、そのようなエンジンの動作には、従来の排気量のエンジンと同等の出力トルクを供給するターボ圧縮機の存在が必要になる。直接噴射と組み合わされて、この種類のエンジンでは、全負荷性能を十分優位にするように、可変タイミングが必要になる。「可変タイミング」という用語は、本明細書では、吸気弁と排気弁とのタイミングが変化できるという技術を指す。
【0003】
エンジン制御の目標は、汚染物質と燃料消費とを最小にしつつ、(アクセルペダルを通した)ドライバの要求に対するトルク応答を保証することである。ガソリンエンジンにおいて、三元触媒は、汚染物質(窒素酸化物NOx、炭化水素HCおよび一酸化炭素CO)の処理を実現する。この触媒は、狭い動作範囲、つまり過剰な空気が無く燃料が完全燃焼するような空気/燃料の混合比率の場合に最適に動作する。この比率は化学量論(stoichiometry)によって決められる。この比率は、燃料/空気の比が1の場合に得られる。rで表される燃焼の濃度は、実際の混合気における空気の質量(Mair)に対する燃料質量(Mfuel)の比と、化学量論的な混合気における空気の質量(Mair)に対する燃料の質量(Mfuel)の比と、の比率によって定義される:
【0004】
【数1】

【0005】
燃料/空気の比の逆数に対応する、λで表記されるパラメータが一般的に用いられる。つまり、λ=14.5・Mfuel/Mairである。目標は、燃料/空気の比を、1(当量比)に維持することであり、これにより、噴射される燃料の質量は、Mfuel=Mair/14.5の関係によって、取り込まれる空気の質量と関連づけられている。与えられるトルクは、1つのデータ、つまりシリンダ内に取り込まれる空気の質量のみに依存していることが明らかである。
【0006】
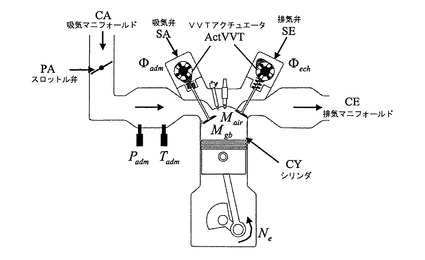
図1は、VVT(可変バルブタイミング:Variable Valve Timing)型のガソリンエンジンの模式図である。このエンジンは、新鮮な空気用の吸気マニフォールド(CA)を有しており、スロットル弁(PA)によってシリンダ(CY)内に吸気される空気の量を調整することができる。圧力(Padm)および温度(Tadm)を計測する手段は、一般に、シリンダ(CY)とスロットル弁(PA)との間に位置している。シリンダ(CY)は吸気弁(SA)および排気弁(SE)を有している。これらの弁の各々には、弁のリフトのタイミングを制御するVVTアクチュエータ(ActVVT)が備わっている。これらのアクチュエータの位置は、吸気弁についてはΦadmで表され、排気弁についてはΦechで表される。また、エンジンは、シリンダの出口に排気マニフォールド(CE)を有している。
【0007】
タイミングが固定されたエンジンでは、空気の充填は、エンジン回転数および吸気圧力に依存した静的な関係によって与えられる。したがって、シリンダ内の空気の質量の制御は、スロットル弁による吸気圧力の制御に対応する。VVT型のエンジンでは、充填は、吸気弁および排気弁の開閉のタイミングにも依存する。図2は、クランク角度αの関数として複数の弁のリフト曲線(LS)の位相シフト(移動)を示しており、排気弁のリフトはLEで表され、吸気弁のリフトはLAで表されている。弁の位相シフトは、前の燃焼からの気体の内部再循環を可能にすることで、燃焼室内の燃焼した気体の量を修正することを可能にする。トルクの過渡期では、吸気圧力と可変タイミングアクチュエータ(例えばVVTアクチュエータ)との間の動力学的な違いが、空気の質量に影響を与える可能性がある。この影響が、トルクの低下および運転の容易さの低下を引き起こす。
【0008】
過渡的状態の下で、空気の質量に対する、可変タイミングアクチュエータの影響を補償する様々な公知の制御方法がある。非特許文献1には、スロットル位置の計測値およびエンジン回転数の計測値に基づいて、複数の可変タイミングアクチュエータの動的制御が開示されている。
【0009】
しかし、そのような制御には、可変タイミングアクチュエータの動力学に関する適切な知識が必要であるが、これは現実的ではない(動力学はオイルの温度および油圧に依存する)。
【0010】
他の方法では、複数の可変タイミングアクチュエータを新鮮な空気の吸気システムにおける外乱と見なしている。この方法では、タイミングが固定されたエンジンにおいて得られる応答と同様に、過渡的な空気の応答を得ることを可能にするスロットル位置の設定点を生成している。このような方法が、非特許文献2および非特許文献3に記載されている。
【先行技術文献】
【非特許文献】
【0011】
【非特許文献1】A. StefanopoulouおよびI. Kolmanovsky、「Dynamic scheduling of internal exhaust gas recirculation systems(内部排気ガス再循環システムの動的なスケジューリング)」、Proc. IMECE、vol.61、1997、pp.671-678
【非特許文献2】M. Jankovic、F. Frischmuth、A. StefanopoulouおよびJ. Cook、「Torque management of engines with variable cam timing(可変カムタイミングによるエンジンのトルク管理)」、Control Systems Magazine、IEEE、vol.18、1998、pp.34-42
【非特許文献3】M.Jankovic、「Nonlinear control in automotive engine applications(自動車エンジンにおける非線形制御)」、Proc. of 15th International Symposium on Mathematical Theory of Networks and Systems、2002
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記の方法では、スロットル制御における複数の可変タイミングアクチュエータの位置の計測値を用いて、系の様々な動力学を考慮している。しかし、これらの方法では、複数の可変タイミングアクチュエータは、動作点に応じてシリンダ内の最適な量の燃焼した気体を達成するように位置される。
【0013】
本発明の目的は、系の動力学を考慮して、シリンダ内の空気の質量と燃焼した気体の質量とを制御する代替の方法に関する。本方法によれば、複数の可変タイミングアクチュエータの位置の計測値を考慮して、吸気圧力の設定点を生成することによって、取り込まれる空気の質量を制御することができる。それとともに、本方法では、吸気圧力の計測値を考慮して複数の可変タイミングアクチュエータの設定点を生成することによって、燃焼した気体の質量を制御することができる。
【課題を解決するための手段】
【0014】
本発明は、可変タイミングガソリンエンジンのシリンダ内に取り込まれる気体の質量を制御する方法に関する。シリンダは吸気弁および排気弁を有し、該吸気弁および該排気弁の夫々が可変タイミングアクチュエータを備えている。シリンダは、吸気スロットルを備えた吸気マニフォールドに接続されている。本方法によれば、シリンダ内に取り込まれる空気の質量の設定点とシリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定され、これらの気体(空気および燃焼した気体)の質量の設定点は、
2つの可変タイミングアクチュエータの位置の計測値と空気の質量の設定点とから吸気圧力の設定点を生成するステップと、
吸気圧力の計測値と燃焼した気体の質量の設定点とから、2つの可変タイミングアクチュエータの各々の位置の設定点を生成するステップと、
吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とが達成されるように、吸気スロットルと2つの可変タイミングアクチュエータとを制御するステップと、を実行して設定される。
【0015】
本方法によれば、2つの可変タイミングアクチュエータの位置の設定点は、
第1のアクチュエータの位置の設定点をマッピングによって生成するステップと、
第1のアクチュエータの位置の設定点と、吸気圧力の計測値と、燃焼した気体の質量の設定点とによって、第2のアクチュエータの位置の設定点を生成するステップと、
第2のアクチュエータの位置の設定点が第2のアクチュエータの臨界位置に該当している場合に、第1のアクチュエータの位置の設定点を修正するステップと、によって生成されてよい。
【0016】
吸気圧力と2つの可変タイミングアクチュエータの位置との関数としてシリンダ内の空気の質量を推定できるようにする第1のモデルfと、吸気圧力と2つの可変タイミングアクチュエータの位置との関数としてシリンダ内の燃焼した気体の質量を推定できるようにする第2のモデルgと、を有する静的なシリンダ充填モデルであって、第1のモデルfが吸気圧力に関して可逆な関数であり、第2のモデルgが2つの可変タイミングアクチュエータの位置に関して可逆な関数である静的なシリンダ充填モデルを、吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とを決定するために用いることが可能である。
【図面の簡単な説明】
【0017】
【図1】VVT形式の可変タイミングガソリンエンジンの模式図である。
【図2】クランク角度αの関数としての、弁のリフト曲線(LS)の位相シフト(移動)を示す図である。
【図3】本発明の制御戦略を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図面を参照して説明する。
【0019】
以降の説明において、以下の表記が用いられる。
【0020】
計測される変数
・Ne:エンジン回転数。通常、これは一定であると見なされる。(この仮定は、エンジン回転数の変動が対象としている他の変数の変動よりも遙かに遅いという事実によって正当化される。)
・Padm:吸気マニフォールド内の圧力。これは、各TDC(上死点)における平均値に相当している。圧力の定義域はΩPで表される。
・Tadm:吸気マニフォールド内の温度。通常、この変数は一定であると見なされている。実際に、スロットルの上流に設置されている交換器によって吸気温度を調節することができる。
・Φadm:吸気弁の可変タイミングアクチュエータの位置。この位置は、基準位置からの角度で表した位相シフトに相当している。アクチュエータは飽和し、その動作範囲はΩadmによって表される。
・Φech:排気弁の可変タイミングアクチュエータの位置。この位置は、基準位置からの角度で表した位相シフトに相当している。アクチュエータは飽和し、その動作範囲はΩechによって表される。
【0021】
制御される変数
・Mair:シリンダ内に取り込まれる空気の質量。これは、吸気弁が閉じたときにシリンダ内に存在している空気の量に相当している。空気の質量の定義域はΩairで表される。
・Mgb:シリンダ内に取り込まれる燃焼した気体の質量。これは、吸気弁が閉じたときにシリンダ内に存在している燃焼した気体の量に相当している。燃焼した気体の質量の定義域はΩgbで表される。
【0022】
達成すべき設定点(設定値)
下記表式、
【0023】
【数2】
【0024】
は、シリンダ内に取り込まれる空気の質量の設定点である。これは、エンジン回転数と、ドライバによって要求されたトルクとに依存し、マッピングによって得られる。
【0025】
下記表式、
【0026】
【数3】
【0027】
は、シリンダ内に取り込まれる燃焼した気体の質量の設定点である。これは、エンジン回転数と、ドライバによって要求されるトルクとに依存してマッピングによって得られる。これは、燃料消費−汚染に関する最適値に相当する。
【0028】
取り込まれる質量のコントローラ(trapped mass controller)によって定められる設定点
下記表式、
【0029】
【数4】
【0030】
は、吸気圧力の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0031】
下記表式、
【0032】
【数5】
【0033】
は、吸気弁の可変タイミングアクチュエータの位置の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0034】
下記表式、
【0035】
【数6】
【0036】
は、排気弁の可変タイミングアクチュエータの位置の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0037】
本発明の方法は、可変タイミングガソリンエンジンのシリンダ内に取り込まれる気体の質量を制御することを目標とする。まず、シリンダ内に取り込まれる空気の質量の設定点とシリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される。
【0038】
これら2つの設定点は、エンジン回転数と、ドライバによって要求されるトルクとに依存し、マッピングによって求められる。この種のマッピングは、専門家には公知である。
【0039】
シリンダへの空気および燃焼した気体の充填は、準静的な状態においては、シリンダの外部の条件、つまり吸気圧力および可変タイミングアクチュエータの位置に依存する。したがって、これらの気体の質量の設定点を達成するために、以下のステップが実行される:
ステップ1.(2つの)可変タイミングアクチュエータの位置の計測値と、空気の質量の設定点とから、吸気圧力の設定点を生成するステップ
ステップ2.吸気圧力の計測値と燃焼した気体の質量の設定点とから可変タイミングアクチュエータの各々の位置の設定点を生成するステップ
ステップ3.吸気圧力の設定点と可変タイミングアクチュエータの位置の設定点とに適合するように、スロットルと可変タイミングアクチュエータとを制御するステップ。
【0040】
1.吸気圧力の設定点の生成
主な制御目標は、取り込まれる空気の質量である。これはトルクおよび燃料/空気の比率に直接関係するからである。したがって、充填、つまり吸気圧力(可変タイミングアクチュエータが飽和アクチュエータであるため)に対して最も影響の大きい制御変数が用いられる。
【0041】
吸気圧力の設定点を生成するには、新鮮な空気の質量の設定点と可変タイミングアクチュエータの位置の計測値が考慮される。
【0042】
したがって、静的な、シリンダの充填モデルを用いることができる。このモデルは、以下の2つのモデルを有している:
−吸気圧力と可変タイミングアクチュエータの位置との関数として、シリンダ内の空気の質量を算出できるようにする、fによって表される第1のモデル
−吸気圧力と可変タイミングアクチュエータの位置との関数として、シリンダ内の燃焼した気体の質量を算出できるようにする、gによって表される第2のモデル。
【0043】
これにより、モデルは、以下のように書くことができる。
【0044】
【数7】
【0045】
モデルfは、吸気圧力に関して可逆(invertible)でなければならず、モデルgは可変タイミングアクチュエータの位置に関して可逆(invertible)でなければならない。したがって、モデルfとモデルgとは、部分的な変数に対して逆関数が得られるという、以下の3つの仮定を満たす関数である。
・任意の(Φadm,Φech,Mair)∈Ωadm×Ωech×Ωairについて、f(Padm,Φadm,Φech)=Mairを満たす唯一のPadm∈ΩPが存在する。
・任意の(Padm,Φech,Mgb)∈ΩP×Ωech×Ωgbについて、g(Padm,Φadm,Φech)=Mgbを満たす唯一のΦadm∈Rが存在する。本明細書では、大文字の「R」は実数領域を示すものとする。
・任意の(Padm,Φadm,Mgb)∈ΩP×Ωadm×Ωgbについて、g(Padm,Φadm,Φech)=Mgbを満たす唯一のΦech∈Rが存在する。
【0046】
次に、以下の式を満たす3つの逆関数かつ部分関数f-1Φadm,Φech、g-1Padm,Φech、およびg-1Padm,Φintを定義する。
【0047】
【数8】
【0048】
本実施形態の一例では、下記の文献で定められ、後述の付記で説明する静的充填モデルを用いる:T. Leroy、J. Chauvin、F. Le Berr、A. DuparchyおよびG. Alix、「Modeling Fresh Air Charge and Residual Gas Fraction on a Dual Independent Variable Valve Timing SI Engine(一対の独立可変弁タイミング火花点火エンジンにおける、新鮮な空気の充填と残留気体のモデル化)」、Proc. of SAE Conference、2008-01-0983、2008。
【0049】
充填モデルを逆関数にすることで、可変タイミングアクチュエータ(VVT)の実際の位置によって、所望の空気の質量を実現する吸気圧力の設定点を計算することができる。圧力の設定点の表式は以下のようになる。
【0050】
【数9】
【0051】
数式(8)内を数式(9)で置き換えた場合でも、下記等式
【0052】
【数10】
【0053】
が依然として成立し、これは、吸気圧力の設定点を達成することが新鮮な空気の質量の設定点を達成することにつながることを意味している。
【0054】
2.可変タイミングアクチュエータの位置の設定点の生成
第2の制御の目標は、取り込まれる燃焼した気体の質量に関する。残りの2つの制御変数は、2つの可変タイミングアクチュエータの位置である。したがって、系は「過剰に作動(オーバーアクチュエーション)」されている。この系を制御するために、アクチュエータ(たとえば、吸気弁の可変タイミングアクチュエータの位置)が固定される。この戦略は、排気弁の可変タイミングアクチュエータの位置が拘束される場合にも同様に有効である。汚染物質および燃料消費の最小化の基準を満たす、吸気弁の可変タイミングアクチュエータの位置は、空気の質量/エンジン回転数のマッピングによって求められる。このマッピングを、
【0055】
【数11】
【0056】
と表す。これは、安定した条件の下で排出および燃料消費を最小化するように可変タイミングアクチュエータの位置を最適化することで得られる。これにより、排気弁の可変タイミングアクチュエータの位置は、燃焼した気体の質量を制御するための唯一の自由度になる。その設定点は、燃焼した気体の質量モデル(数式(8))の逆関数から計算される。前述のように、この逆関数で用いられるのは吸気圧力の計測値である。
【0057】
【数12】
【0058】
一実施形態によれば、(アクチュエータの飽和、つまり弁が臨界点に達したことによって)排気弁の可変タイミングアクチュエータの位置の設定点が達成不能になった場合、除かれていた自由度、つまり吸気弁の可変タイミングアクチュエータの位置が、燃焼した気体の質量の要件を満たすように用いられる。このように、2つの可変タイミングアクチュエータの位置の設定点は以下のようにして生成される:
−マッピングhによって第1のアクチュエータの位置の設定点を生成すること
−第1のアクチュエータの位置の設定点と、吸気圧力の計測値と、燃焼した気体の質量の設定点(つまりモデルgから)とによって、第2のアクチュエータの位置の設定点を生成すること
−第2のアクチュエータの位置の設定点が第2のアクチュエータの臨界位置に該当する場合に、第1のアクチュエータの位置の設定点を修正すること。
【0059】
2つの位置の設定点の式は以下のようになる。
【0060】
【数13】
【0061】
ここで、
【0062】
【数14】
【0063】
は、Ωechの内部にあり、Satadm、およびSatechは、2つの可変タイミングアクチュエータの飽和関数である。
【0064】
数式(8)内に数式(13)を適用しても、少なくとも1つの位置が飽和していない場合、等式
【0065】
【数15】
【0066】
は依然として成立し、これは、2つの位置の設定点を達成することが、燃焼した気体の質量の設定点を達成することにつながることを意味している。
【0067】
これらの設定点が一旦生成されると、スロットルと可変タイミングアクチュエータは、吸気圧力の設定点とこれらの可変タイミングアクチュエータの位置の設定点とを達成するように制御される。
【0068】
本方法を実施するために、図3に示している制御戦略では、2種類のコントローラが組み合わされている。
【0069】
1−第1の種類のコントローラは、低レベルコントローラCBNに関する。低レベルコントローラは、2つの独立したコントローラを有しており、第1のコントローラC−PAの機能は、吸気マニフォールド内の圧力を制御することであり、第2のコントローラC−VVTの機能は、吸気弁と排気弁の2つの可変タイミングアクチュエータの位置を制御することである。
【0070】
これらの低レベルコントローラは任意の種類のものであってよい。吸気圧力の制御は、スロットルアクチュエータ(PA)を制御することによって実施される。制御のために、例えば、吸気マニフォールド内に位置している圧力検出器を用いることができる。この種類のコントローラの例は、T. Leroy、J. ChouvinおよびN. Petit、「Airpath Control of a SI Engine with Variable Valve Timing Actuators(可変弁タイミングアクチュエータを備えている火花点火エンジンの空気経路の制御)」、Proc. Of ACC、2008に開示されている。
【0071】
可変タイミングアクチュエータの位置は、たとえば位置計測器を使用して制御することができる。この種類のコントローラは、J. ChauvinおよびN. Petit、「Experimental Control of Variable Cam Timing Actuators(可変カムタイミングアクチュエータの実験的な制御)」、Proc. of IFAC Automotive Control、2007に開示されている。
【0072】
これらの2つの独立したコントローラは、同一の過渡性能を有してはいない。低負荷では、可変タイミングアクチュエータ(ActVVT)は、吸気圧力に対して低速であるのに対し、高負荷では、圧力は、ターボ圧縮機の慣性のためにはるかに低速である。そのため、制御されるべき量(空気の質量/燃焼した気体)は必然的に低下する。
【0073】
提案している制御戦略では、取り込まれる質量の要求を達成するべき圧力および位置の設定点を決定する高レベルコントローラを導入することによって、これらの低レベルコントローラの連携が実現される。
【0074】
2−このように、第2の種類のコントローラは高レベルコントローラCHNに関する。高レベルコントローラは2つの独立したコントローラを有しており、第1のコントローラCPadmの機能は吸気マニフォールド内の圧力の設定点を決定することであり、第2のコントローラCFの機能は2つの可変タイミングアクチュエータの位置の設定点を決定することである。これらの設定点は、空気の質量の設定点と燃焼した気体の質量の設定点との関数として定められている。
【0075】
低レベルコントローラの様々な応答時間を考慮するため、吸気圧力の計測値と2つのアクチュエータの位置とを用いてそれらの設定点が生成される。この制御戦略によって、取り込まれる質量の過渡的振る舞いを良好にすることができる。実際に、他のコントローラに対して低レベルコントローラが遅いことは、高レベルの設定点を生成するために低レベルの変数の計測値を用いることによって考慮されている。
【0076】
この制御戦略によって、以下のことが可能になる。
−可変タイミングエンジンのシリンダ内の空気の質量および燃焼した気体の質量の制御。
−空気の質量および燃焼した気体の質量の過渡的応答を改善するように、充填に直接作用する変数(吸気圧力および可変タイミングアクチュエータの位置)の計測値を考慮すること。
−燃料/空気比の調整および運転の容易さの改善につながる、空気の質量の過渡的応答の改善。たとえば、可変タイミングアクチュエータが低速なこと(油圧および油温に大きく依存している)は、要求される空気の質量を達成するように吸気圧力の設定点を修正することによって補償される。
−シリンダ内の燃焼した気体の質量の制御。例えば、燃焼安定性を改善するために、冷却開始条件下では、燃焼した気体についての設定点を緩和することができる。それから、説明した制御によって、所望量の燃焼した気体を達成するように、可変タイミングアクチュエータの位置を設定する。
−シリンダ内の燃焼した気体の、固定された量を維持しつつ、シリンダ内に取り込まれる空気の質量の制御。
−シリンダ内の空気の、固定された量を維持しつつ、シリンダ内に取り込まれる燃焼した気体の質量の制御。
−系の自由度を取り除き、スーパバイザとして動作するように、可変タイミングアクチュエータの一方の経験的な位置の使用(つまり、
【0077】
【数16】
【0078】
マッピング)。説明した戦略においては、吸気弁または排気弁の可変タイミングアクチュエータを無関係に使用することができる。
【0079】
[付記]
充填モデル
エンジン回転数、温度、吸気圧力および2つのアクチュエータ位置の関数として、シリンダ内の空気の質量と燃焼した気体の質量とを推定する静的な充填モデルを考える(例えば、T. Leroy、J. Chauvin、F. Le Berr、A. DuparchyおよびG. Alix、「Modeling Fresh Air Charge and Residual Gas Fraction on a Dual Independent Variable Valve Timing SI Engine(一対の独立可変弁タイミング火花点火エンジンにおける、新鮮な空気の充填と残留気体のモデル化)」、Proc. of SAE Conference、2008-01-0983、2008)。
【0080】
空気の質量Mairおよび燃焼した気体の質量Mgbを以下のように定義する。
【0081】
【数17】
【0082】
ここで、
・α1、α2およびα3は、PadmとNeの既知のマッピング(エンジンテストベンチで求められる)であり、
・Vivcは、吸気弁アクチュエータの位置φadmに依存する、ivc(吸気弁の閉鎖)時におけるシリンダ容積であり、
・Vevcは、排気弁アクチュエータの位置φechに依存する、evc(排気弁の閉鎖)時におけるシリンダ容積であり、
・OFは、吸気弁のアクチュエータの位置φadmと排気弁のアクチュエータの位置φechとに依存するオーバーラップ因子である。
【0083】
オーバーラップ因子OFは、以下の関係によって求められる。
【0084】
【数18】
【0085】
ここで、
・AadmおよびAechは、吸気弁および排気弁の開口面積であり、
・θは、クランク角度であり、
・θivoは、吸気弁のアクチュエータの位置φadmに依存する、ivo(吸気弁の開放)時におけるクランク角度であり、
・θevcは、排気弁のアクチュエータの位置φechに依存する、evc(排気弁の開放)時におけるクランク角度であり、
・θiv=θevは、2つの弁が同じ開口面積を有しているときのクランク角度である。
【0086】
それから、以下のように定義される関数f:ΩP×Ωadm×Ωech→Ωairおよび関数g:ΩP×Ωadm×Ωech→Ωgbを導入する。
【0087】
【数19】
【0088】
わかりやすいように、この数式からエンジン回転数および吸気温度が取り除かれる。このようにして、以下の数式が得られる。
【0089】
【数20】
【技術分野】
【0001】
本発明はエンジン制御に関し、特に、可変タイミングガソリンエンジンにおけるシリンダ内に取り込まれる気体の質量の制御に関する。
【背景技術】
【0002】
ガソリンエンジンの燃料消費と排気とに関する制約が、ガソリンエンジンに際だった変化を引き起こしている。小型化は最も有望な解決策のように思える。実際に、小型化によって、エンジンの複数の動作ポイントをより効率の高い領域にシフトさせること(ポンピングロスの低減)が可能になる。そして、そのようなエンジンの動作には、従来の排気量のエンジンと同等の出力トルクを供給するターボ圧縮機の存在が必要になる。直接噴射と組み合わされて、この種類のエンジンでは、全負荷性能を十分優位にするように、可変タイミングが必要になる。「可変タイミング」という用語は、本明細書では、吸気弁と排気弁とのタイミングが変化できるという技術を指す。
【0003】
エンジン制御の目標は、汚染物質と燃料消費とを最小にしつつ、(アクセルペダルを通した)ドライバの要求に対するトルク応答を保証することである。ガソリンエンジンにおいて、三元触媒は、汚染物質(窒素酸化物NOx、炭化水素HCおよび一酸化炭素CO)の処理を実現する。この触媒は、狭い動作範囲、つまり過剰な空気が無く燃料が完全燃焼するような空気/燃料の混合比率の場合に最適に動作する。この比率は化学量論(stoichiometry)によって決められる。この比率は、燃料/空気の比が1の場合に得られる。rで表される燃焼の濃度は、実際の混合気における空気の質量(Mair)に対する燃料質量(Mfuel)の比と、化学量論的な混合気における空気の質量(Mair)に対する燃料の質量(Mfuel)の比と、の比率によって定義される:
【0004】
【数1】
【0005】
燃料/空気の比の逆数に対応する、λで表記されるパラメータが一般的に用いられる。つまり、λ=14.5・Mfuel/Mairである。目標は、燃料/空気の比を、1(当量比)に維持することであり、これにより、噴射される燃料の質量は、Mfuel=Mair/14.5の関係によって、取り込まれる空気の質量と関連づけられている。与えられるトルクは、1つのデータ、つまりシリンダ内に取り込まれる空気の質量のみに依存していることが明らかである。
【0006】
図1は、VVT(可変バルブタイミング:Variable Valve Timing)型のガソリンエンジンの模式図である。このエンジンは、新鮮な空気用の吸気マニフォールド(CA)を有しており、スロットル弁(PA)によってシリンダ(CY)内に吸気される空気の量を調整することができる。圧力(Padm)および温度(Tadm)を計測する手段は、一般に、シリンダ(CY)とスロットル弁(PA)との間に位置している。シリンダ(CY)は吸気弁(SA)および排気弁(SE)を有している。これらの弁の各々には、弁のリフトのタイミングを制御するVVTアクチュエータ(ActVVT)が備わっている。これらのアクチュエータの位置は、吸気弁についてはΦadmで表され、排気弁についてはΦechで表される。また、エンジンは、シリンダの出口に排気マニフォールド(CE)を有している。
【0007】
タイミングが固定されたエンジンでは、空気の充填は、エンジン回転数および吸気圧力に依存した静的な関係によって与えられる。したがって、シリンダ内の空気の質量の制御は、スロットル弁による吸気圧力の制御に対応する。VVT型のエンジンでは、充填は、吸気弁および排気弁の開閉のタイミングにも依存する。図2は、クランク角度αの関数として複数の弁のリフト曲線(LS)の位相シフト(移動)を示しており、排気弁のリフトはLEで表され、吸気弁のリフトはLAで表されている。弁の位相シフトは、前の燃焼からの気体の内部再循環を可能にすることで、燃焼室内の燃焼した気体の量を修正することを可能にする。トルクの過渡期では、吸気圧力と可変タイミングアクチュエータ(例えばVVTアクチュエータ)との間の動力学的な違いが、空気の質量に影響を与える可能性がある。この影響が、トルクの低下および運転の容易さの低下を引き起こす。
【0008】
過渡的状態の下で、空気の質量に対する、可変タイミングアクチュエータの影響を補償する様々な公知の制御方法がある。非特許文献1には、スロットル位置の計測値およびエンジン回転数の計測値に基づいて、複数の可変タイミングアクチュエータの動的制御が開示されている。
【0009】
しかし、そのような制御には、可変タイミングアクチュエータの動力学に関する適切な知識が必要であるが、これは現実的ではない(動力学はオイルの温度および油圧に依存する)。
【0010】
他の方法では、複数の可変タイミングアクチュエータを新鮮な空気の吸気システムにおける外乱と見なしている。この方法では、タイミングが固定されたエンジンにおいて得られる応答と同様に、過渡的な空気の応答を得ることを可能にするスロットル位置の設定点を生成している。このような方法が、非特許文献2および非特許文献3に記載されている。
【先行技術文献】
【非特許文献】
【0011】
【非特許文献1】A. StefanopoulouおよびI. Kolmanovsky、「Dynamic scheduling of internal exhaust gas recirculation systems(内部排気ガス再循環システムの動的なスケジューリング)」、Proc. IMECE、vol.61、1997、pp.671-678
【非特許文献2】M. Jankovic、F. Frischmuth、A. StefanopoulouおよびJ. Cook、「Torque management of engines with variable cam timing(可変カムタイミングによるエンジンのトルク管理)」、Control Systems Magazine、IEEE、vol.18、1998、pp.34-42
【非特許文献3】M.Jankovic、「Nonlinear control in automotive engine applications(自動車エンジンにおける非線形制御)」、Proc. of 15th International Symposium on Mathematical Theory of Networks and Systems、2002
【発明の概要】
【発明が解決しようとする課題】
【0012】
上記の方法では、スロットル制御における複数の可変タイミングアクチュエータの位置の計測値を用いて、系の様々な動力学を考慮している。しかし、これらの方法では、複数の可変タイミングアクチュエータは、動作点に応じてシリンダ内の最適な量の燃焼した気体を達成するように位置される。
【0013】
本発明の目的は、系の動力学を考慮して、シリンダ内の空気の質量と燃焼した気体の質量とを制御する代替の方法に関する。本方法によれば、複数の可変タイミングアクチュエータの位置の計測値を考慮して、吸気圧力の設定点を生成することによって、取り込まれる空気の質量を制御することができる。それとともに、本方法では、吸気圧力の計測値を考慮して複数の可変タイミングアクチュエータの設定点を生成することによって、燃焼した気体の質量を制御することができる。
【課題を解決するための手段】
【0014】
本発明は、可変タイミングガソリンエンジンのシリンダ内に取り込まれる気体の質量を制御する方法に関する。シリンダは吸気弁および排気弁を有し、該吸気弁および該排気弁の夫々が可変タイミングアクチュエータを備えている。シリンダは、吸気スロットルを備えた吸気マニフォールドに接続されている。本方法によれば、シリンダ内に取り込まれる空気の質量の設定点とシリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定され、これらの気体(空気および燃焼した気体)の質量の設定点は、
2つの可変タイミングアクチュエータの位置の計測値と空気の質量の設定点とから吸気圧力の設定点を生成するステップと、
吸気圧力の計測値と燃焼した気体の質量の設定点とから、2つの可変タイミングアクチュエータの各々の位置の設定点を生成するステップと、
吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とが達成されるように、吸気スロットルと2つの可変タイミングアクチュエータとを制御するステップと、を実行して設定される。
【0015】
本方法によれば、2つの可変タイミングアクチュエータの位置の設定点は、
第1のアクチュエータの位置の設定点をマッピングによって生成するステップと、
第1のアクチュエータの位置の設定点と、吸気圧力の計測値と、燃焼した気体の質量の設定点とによって、第2のアクチュエータの位置の設定点を生成するステップと、
第2のアクチュエータの位置の設定点が第2のアクチュエータの臨界位置に該当している場合に、第1のアクチュエータの位置の設定点を修正するステップと、によって生成されてよい。
【0016】
吸気圧力と2つの可変タイミングアクチュエータの位置との関数としてシリンダ内の空気の質量を推定できるようにする第1のモデルfと、吸気圧力と2つの可変タイミングアクチュエータの位置との関数としてシリンダ内の燃焼した気体の質量を推定できるようにする第2のモデルgと、を有する静的なシリンダ充填モデルであって、第1のモデルfが吸気圧力に関して可逆な関数であり、第2のモデルgが2つの可変タイミングアクチュエータの位置に関して可逆な関数である静的なシリンダ充填モデルを、吸気圧力の設定点と2つの可変タイミングアクチュエータの位置の設定点とを決定するために用いることが可能である。
【図面の簡単な説明】
【0017】
【図1】VVT形式の可変タイミングガソリンエンジンの模式図である。
【図2】クランク角度αの関数としての、弁のリフト曲線(LS)の位相シフト(移動)を示す図である。
【図3】本発明の制御戦略を示す図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施形態について図面を参照して説明する。
【0019】
以降の説明において、以下の表記が用いられる。
【0020】
計測される変数
・Ne:エンジン回転数。通常、これは一定であると見なされる。(この仮定は、エンジン回転数の変動が対象としている他の変数の変動よりも遙かに遅いという事実によって正当化される。)
・Padm:吸気マニフォールド内の圧力。これは、各TDC(上死点)における平均値に相当している。圧力の定義域はΩPで表される。
・Tadm:吸気マニフォールド内の温度。通常、この変数は一定であると見なされている。実際に、スロットルの上流に設置されている交換器によって吸気温度を調節することができる。
・Φadm:吸気弁の可変タイミングアクチュエータの位置。この位置は、基準位置からの角度で表した位相シフトに相当している。アクチュエータは飽和し、その動作範囲はΩadmによって表される。
・Φech:排気弁の可変タイミングアクチュエータの位置。この位置は、基準位置からの角度で表した位相シフトに相当している。アクチュエータは飽和し、その動作範囲はΩechによって表される。
【0021】
制御される変数
・Mair:シリンダ内に取り込まれる空気の質量。これは、吸気弁が閉じたときにシリンダ内に存在している空気の量に相当している。空気の質量の定義域はΩairで表される。
・Mgb:シリンダ内に取り込まれる燃焼した気体の質量。これは、吸気弁が閉じたときにシリンダ内に存在している燃焼した気体の量に相当している。燃焼した気体の質量の定義域はΩgbで表される。
【0022】
達成すべき設定点(設定値)
下記表式、
【0023】
【数2】
【0024】
は、シリンダ内に取り込まれる空気の質量の設定点である。これは、エンジン回転数と、ドライバによって要求されたトルクとに依存し、マッピングによって得られる。
【0025】
下記表式、
【0026】
【数3】
【0027】
は、シリンダ内に取り込まれる燃焼した気体の質量の設定点である。これは、エンジン回転数と、ドライバによって要求されるトルクとに依存してマッピングによって得られる。これは、燃料消費−汚染に関する最適値に相当する。
【0028】
取り込まれる質量のコントローラ(trapped mass controller)によって定められる設定点
下記表式、
【0029】
【数4】
【0030】
は、吸気圧力の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0031】
下記表式、
【0032】
【数5】
【0033】
は、吸気弁の可変タイミングアクチュエータの位置の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0034】
下記表式、
【0035】
【数6】
【0036】
は、排気弁の可変タイミングアクチュエータの位置の設定点である。この量は、取り込まれる質量を制御するコントローラによって定められる。
【0037】
本発明の方法は、可変タイミングガソリンエンジンのシリンダ内に取り込まれる気体の質量を制御することを目標とする。まず、シリンダ内に取り込まれる空気の質量の設定点とシリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される。
【0038】
これら2つの設定点は、エンジン回転数と、ドライバによって要求されるトルクとに依存し、マッピングによって求められる。この種のマッピングは、専門家には公知である。
【0039】
シリンダへの空気および燃焼した気体の充填は、準静的な状態においては、シリンダの外部の条件、つまり吸気圧力および可変タイミングアクチュエータの位置に依存する。したがって、これらの気体の質量の設定点を達成するために、以下のステップが実行される:
ステップ1.(2つの)可変タイミングアクチュエータの位置の計測値と、空気の質量の設定点とから、吸気圧力の設定点を生成するステップ
ステップ2.吸気圧力の計測値と燃焼した気体の質量の設定点とから可変タイミングアクチュエータの各々の位置の設定点を生成するステップ
ステップ3.吸気圧力の設定点と可変タイミングアクチュエータの位置の設定点とに適合するように、スロットルと可変タイミングアクチュエータとを制御するステップ。
【0040】
1.吸気圧力の設定点の生成
主な制御目標は、取り込まれる空気の質量である。これはトルクおよび燃料/空気の比率に直接関係するからである。したがって、充填、つまり吸気圧力(可変タイミングアクチュエータが飽和アクチュエータであるため)に対して最も影響の大きい制御変数が用いられる。
【0041】
吸気圧力の設定点を生成するには、新鮮な空気の質量の設定点と可変タイミングアクチュエータの位置の計測値が考慮される。
【0042】
したがって、静的な、シリンダの充填モデルを用いることができる。このモデルは、以下の2つのモデルを有している:
−吸気圧力と可変タイミングアクチュエータの位置との関数として、シリンダ内の空気の質量を算出できるようにする、fによって表される第1のモデル
−吸気圧力と可変タイミングアクチュエータの位置との関数として、シリンダ内の燃焼した気体の質量を算出できるようにする、gによって表される第2のモデル。
【0043】
これにより、モデルは、以下のように書くことができる。
【0044】
【数7】
【0045】
モデルfは、吸気圧力に関して可逆(invertible)でなければならず、モデルgは可変タイミングアクチュエータの位置に関して可逆(invertible)でなければならない。したがって、モデルfとモデルgとは、部分的な変数に対して逆関数が得られるという、以下の3つの仮定を満たす関数である。
・任意の(Φadm,Φech,Mair)∈Ωadm×Ωech×Ωairについて、f(Padm,Φadm,Φech)=Mairを満たす唯一のPadm∈ΩPが存在する。
・任意の(Padm,Φech,Mgb)∈ΩP×Ωech×Ωgbについて、g(Padm,Φadm,Φech)=Mgbを満たす唯一のΦadm∈Rが存在する。本明細書では、大文字の「R」は実数領域を示すものとする。
・任意の(Padm,Φadm,Mgb)∈ΩP×Ωadm×Ωgbについて、g(Padm,Φadm,Φech)=Mgbを満たす唯一のΦech∈Rが存在する。
【0046】
次に、以下の式を満たす3つの逆関数かつ部分関数f-1Φadm,Φech、g-1Padm,Φech、およびg-1Padm,Φintを定義する。
【0047】
【数8】
【0048】
本実施形態の一例では、下記の文献で定められ、後述の付記で説明する静的充填モデルを用いる:T. Leroy、J. Chauvin、F. Le Berr、A. DuparchyおよびG. Alix、「Modeling Fresh Air Charge and Residual Gas Fraction on a Dual Independent Variable Valve Timing SI Engine(一対の独立可変弁タイミング火花点火エンジンにおける、新鮮な空気の充填と残留気体のモデル化)」、Proc. of SAE Conference、2008-01-0983、2008。
【0049】
充填モデルを逆関数にすることで、可変タイミングアクチュエータ(VVT)の実際の位置によって、所望の空気の質量を実現する吸気圧力の設定点を計算することができる。圧力の設定点の表式は以下のようになる。
【0050】
【数9】
【0051】
数式(8)内を数式(9)で置き換えた場合でも、下記等式
【0052】
【数10】
【0053】
が依然として成立し、これは、吸気圧力の設定点を達成することが新鮮な空気の質量の設定点を達成することにつながることを意味している。
【0054】
2.可変タイミングアクチュエータの位置の設定点の生成
第2の制御の目標は、取り込まれる燃焼した気体の質量に関する。残りの2つの制御変数は、2つの可変タイミングアクチュエータの位置である。したがって、系は「過剰に作動(オーバーアクチュエーション)」されている。この系を制御するために、アクチュエータ(たとえば、吸気弁の可変タイミングアクチュエータの位置)が固定される。この戦略は、排気弁の可変タイミングアクチュエータの位置が拘束される場合にも同様に有効である。汚染物質および燃料消費の最小化の基準を満たす、吸気弁の可変タイミングアクチュエータの位置は、空気の質量/エンジン回転数のマッピングによって求められる。このマッピングを、
【0055】
【数11】
【0056】
と表す。これは、安定した条件の下で排出および燃料消費を最小化するように可変タイミングアクチュエータの位置を最適化することで得られる。これにより、排気弁の可変タイミングアクチュエータの位置は、燃焼した気体の質量を制御するための唯一の自由度になる。その設定点は、燃焼した気体の質量モデル(数式(8))の逆関数から計算される。前述のように、この逆関数で用いられるのは吸気圧力の計測値である。
【0057】
【数12】
【0058】
一実施形態によれば、(アクチュエータの飽和、つまり弁が臨界点に達したことによって)排気弁の可変タイミングアクチュエータの位置の設定点が達成不能になった場合、除かれていた自由度、つまり吸気弁の可変タイミングアクチュエータの位置が、燃焼した気体の質量の要件を満たすように用いられる。このように、2つの可変タイミングアクチュエータの位置の設定点は以下のようにして生成される:
−マッピングhによって第1のアクチュエータの位置の設定点を生成すること
−第1のアクチュエータの位置の設定点と、吸気圧力の計測値と、燃焼した気体の質量の設定点(つまりモデルgから)とによって、第2のアクチュエータの位置の設定点を生成すること
−第2のアクチュエータの位置の設定点が第2のアクチュエータの臨界位置に該当する場合に、第1のアクチュエータの位置の設定点を修正すること。
【0059】
2つの位置の設定点の式は以下のようになる。
【0060】
【数13】
【0061】
ここで、
【0062】
【数14】
【0063】
は、Ωechの内部にあり、Satadm、およびSatechは、2つの可変タイミングアクチュエータの飽和関数である。
【0064】
数式(8)内に数式(13)を適用しても、少なくとも1つの位置が飽和していない場合、等式
【0065】
【数15】
【0066】
は依然として成立し、これは、2つの位置の設定点を達成することが、燃焼した気体の質量の設定点を達成することにつながることを意味している。
【0067】
これらの設定点が一旦生成されると、スロットルと可変タイミングアクチュエータは、吸気圧力の設定点とこれらの可変タイミングアクチュエータの位置の設定点とを達成するように制御される。
【0068】
本方法を実施するために、図3に示している制御戦略では、2種類のコントローラが組み合わされている。
【0069】
1−第1の種類のコントローラは、低レベルコントローラCBNに関する。低レベルコントローラは、2つの独立したコントローラを有しており、第1のコントローラC−PAの機能は、吸気マニフォールド内の圧力を制御することであり、第2のコントローラC−VVTの機能は、吸気弁と排気弁の2つの可変タイミングアクチュエータの位置を制御することである。
【0070】
これらの低レベルコントローラは任意の種類のものであってよい。吸気圧力の制御は、スロットルアクチュエータ(PA)を制御することによって実施される。制御のために、例えば、吸気マニフォールド内に位置している圧力検出器を用いることができる。この種類のコントローラの例は、T. Leroy、J. ChouvinおよびN. Petit、「Airpath Control of a SI Engine with Variable Valve Timing Actuators(可変弁タイミングアクチュエータを備えている火花点火エンジンの空気経路の制御)」、Proc. Of ACC、2008に開示されている。
【0071】
可変タイミングアクチュエータの位置は、たとえば位置計測器を使用して制御することができる。この種類のコントローラは、J. ChauvinおよびN. Petit、「Experimental Control of Variable Cam Timing Actuators(可変カムタイミングアクチュエータの実験的な制御)」、Proc. of IFAC Automotive Control、2007に開示されている。
【0072】
これらの2つの独立したコントローラは、同一の過渡性能を有してはいない。低負荷では、可変タイミングアクチュエータ(ActVVT)は、吸気圧力に対して低速であるのに対し、高負荷では、圧力は、ターボ圧縮機の慣性のためにはるかに低速である。そのため、制御されるべき量(空気の質量/燃焼した気体)は必然的に低下する。
【0073】
提案している制御戦略では、取り込まれる質量の要求を達成するべき圧力および位置の設定点を決定する高レベルコントローラを導入することによって、これらの低レベルコントローラの連携が実現される。
【0074】
2−このように、第2の種類のコントローラは高レベルコントローラCHNに関する。高レベルコントローラは2つの独立したコントローラを有しており、第1のコントローラCPadmの機能は吸気マニフォールド内の圧力の設定点を決定することであり、第2のコントローラCFの機能は2つの可変タイミングアクチュエータの位置の設定点を決定することである。これらの設定点は、空気の質量の設定点と燃焼した気体の質量の設定点との関数として定められている。
【0075】
低レベルコントローラの様々な応答時間を考慮するため、吸気圧力の計測値と2つのアクチュエータの位置とを用いてそれらの設定点が生成される。この制御戦略によって、取り込まれる質量の過渡的振る舞いを良好にすることができる。実際に、他のコントローラに対して低レベルコントローラが遅いことは、高レベルの設定点を生成するために低レベルの変数の計測値を用いることによって考慮されている。
【0076】
この制御戦略によって、以下のことが可能になる。
−可変タイミングエンジンのシリンダ内の空気の質量および燃焼した気体の質量の制御。
−空気の質量および燃焼した気体の質量の過渡的応答を改善するように、充填に直接作用する変数(吸気圧力および可変タイミングアクチュエータの位置)の計測値を考慮すること。
−燃料/空気比の調整および運転の容易さの改善につながる、空気の質量の過渡的応答の改善。たとえば、可変タイミングアクチュエータが低速なこと(油圧および油温に大きく依存している)は、要求される空気の質量を達成するように吸気圧力の設定点を修正することによって補償される。
−シリンダ内の燃焼した気体の質量の制御。例えば、燃焼安定性を改善するために、冷却開始条件下では、燃焼した気体についての設定点を緩和することができる。それから、説明した制御によって、所望量の燃焼した気体を達成するように、可変タイミングアクチュエータの位置を設定する。
−シリンダ内の燃焼した気体の、固定された量を維持しつつ、シリンダ内に取り込まれる空気の質量の制御。
−シリンダ内の空気の、固定された量を維持しつつ、シリンダ内に取り込まれる燃焼した気体の質量の制御。
−系の自由度を取り除き、スーパバイザとして動作するように、可変タイミングアクチュエータの一方の経験的な位置の使用(つまり、
【0077】
【数16】
【0078】
マッピング)。説明した戦略においては、吸気弁または排気弁の可変タイミングアクチュエータを無関係に使用することができる。
【0079】
[付記]
充填モデル
エンジン回転数、温度、吸気圧力および2つのアクチュエータ位置の関数として、シリンダ内の空気の質量と燃焼した気体の質量とを推定する静的な充填モデルを考える(例えば、T. Leroy、J. Chauvin、F. Le Berr、A. DuparchyおよびG. Alix、「Modeling Fresh Air Charge and Residual Gas Fraction on a Dual Independent Variable Valve Timing SI Engine(一対の独立可変弁タイミング火花点火エンジンにおける、新鮮な空気の充填と残留気体のモデル化)」、Proc. of SAE Conference、2008-01-0983、2008)。
【0080】
空気の質量Mairおよび燃焼した気体の質量Mgbを以下のように定義する。
【0081】
【数17】
【0082】
ここで、
・α1、α2およびα3は、PadmとNeの既知のマッピング(エンジンテストベンチで求められる)であり、
・Vivcは、吸気弁アクチュエータの位置φadmに依存する、ivc(吸気弁の閉鎖)時におけるシリンダ容積であり、
・Vevcは、排気弁アクチュエータの位置φechに依存する、evc(排気弁の閉鎖)時におけるシリンダ容積であり、
・OFは、吸気弁のアクチュエータの位置φadmと排気弁のアクチュエータの位置φechとに依存するオーバーラップ因子である。
【0083】
オーバーラップ因子OFは、以下の関係によって求められる。
【0084】
【数18】
【0085】
ここで、
・AadmおよびAechは、吸気弁および排気弁の開口面積であり、
・θは、クランク角度であり、
・θivoは、吸気弁のアクチュエータの位置φadmに依存する、ivo(吸気弁の開放)時におけるクランク角度であり、
・θevcは、排気弁のアクチュエータの位置φechに依存する、evc(排気弁の開放)時におけるクランク角度であり、
・θiv=θevは、2つの弁が同じ開口面積を有しているときのクランク角度である。
【0086】
それから、以下のように定義される関数f:ΩP×Ωadm×Ωech→Ωairおよび関数g:ΩP×Ωadm×Ωech→Ωgbを導入する。
【0087】
【数19】
【0088】
わかりやすいように、この数式からエンジン回転数および吸気温度が取り除かれる。このようにして、以下の数式が得られる。
【0089】
【数20】
【特許請求の範囲】
【請求項1】
シリンダが吸気弁および排気弁を有し、該吸気弁および該排気弁の夫々が可変タイミングアクチュエータを備えており、前記シリンダは吸気スロットルを備えた吸気マニフォールドに接続されており、前記シリンダ内に取り込まれる空気の質量の設定点と前記シリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される、可変タイミングガソリンエンジンの前記シリンダ内に取り込まれる気体の質量を制御する方法であって、
前記気体の質量の前記設定点は、
前記可変タイミングアクチュエータの位置の計測値と前記空気の質量の前記設定点とから吸気圧力の設定点を生成するステップと、
吸気圧力の計測値と前記燃焼した気体の質量の前記設定点とから、2つの前記可変タイミングアクチュエータの各々の位置の設定点を生成するステップと、
前記吸気圧力の設定点と2つの前記可変タイミングアクチュエータの位置の前記設定点とが達成されるように、前記吸気スロットルと2つの前記可変タイミングアクチュエータとを制御するステップと、
を実行して達成されることを特徴とする方法。
【請求項2】
2つの前記可変タイミングアクチュエータの位置の設定点は、
第1のアクチュエータの位置の設定点をマッピングによって生成するステップと、
前記第1のアクチュエータの位置の前記設定点と、前記吸気圧力の計測値と、前記燃焼した気体の質量の前記設定点とによって、第2のアクチュエータの位置の設定点を生成するステップと、
前記第2のアクチュエータの位置の前記設定点が前記第2のアクチュエータの臨界位置に該当している場合に、前記第1のアクチュエータの位置の前記設定点を修正するステップと、
によって生成される、請求項1に記載の方法。
【請求項3】
前記吸気圧力の前記設定点と2つの前記可変タイミングアクチュエータの位置の前記設定点とは、前記吸気圧力と2つの前記可変タイミングアクチュエータの前記位置との関数として前記シリンダ内の前記空気の質量を推定できるようにする第1のモデルfと、前記吸気圧力と2つの前記可変タイミングアクチュエータの前記位置との関数として前記シリンダ内の前記燃焼した気体の質量を推定できるようにする第2のモデルgと、を有する静的なシリンダ充填モデルによって決定され、前記第1のモデルfは前記吸気圧力に関して可逆な関数であり、前記第2のモデルgは2つの前記可変タイミングアクチュエータの前記位置に関して可逆な関数である、請求項1または2に記載の方法。
【請求項1】
シリンダが吸気弁および排気弁を有し、該吸気弁および該排気弁の夫々が可変タイミングアクチュエータを備えており、前記シリンダは吸気スロットルを備えた吸気マニフォールドに接続されており、前記シリンダ内に取り込まれる空気の質量の設定点と前記シリンダ内に取り込まれる燃焼した気体の質量の設定点とが決定される、可変タイミングガソリンエンジンの前記シリンダ内に取り込まれる気体の質量を制御する方法であって、
前記気体の質量の前記設定点は、
前記可変タイミングアクチュエータの位置の計測値と前記空気の質量の前記設定点とから吸気圧力の設定点を生成するステップと、
吸気圧力の計測値と前記燃焼した気体の質量の前記設定点とから、2つの前記可変タイミングアクチュエータの各々の位置の設定点を生成するステップと、
前記吸気圧力の設定点と2つの前記可変タイミングアクチュエータの位置の前記設定点とが達成されるように、前記吸気スロットルと2つの前記可変タイミングアクチュエータとを制御するステップと、
を実行して達成されることを特徴とする方法。
【請求項2】
2つの前記可変タイミングアクチュエータの位置の設定点は、
第1のアクチュエータの位置の設定点をマッピングによって生成するステップと、
前記第1のアクチュエータの位置の前記設定点と、前記吸気圧力の計測値と、前記燃焼した気体の質量の前記設定点とによって、第2のアクチュエータの位置の設定点を生成するステップと、
前記第2のアクチュエータの位置の前記設定点が前記第2のアクチュエータの臨界位置に該当している場合に、前記第1のアクチュエータの位置の前記設定点を修正するステップと、
によって生成される、請求項1に記載の方法。
【請求項3】
前記吸気圧力の前記設定点と2つの前記可変タイミングアクチュエータの位置の前記設定点とは、前記吸気圧力と2つの前記可変タイミングアクチュエータの前記位置との関数として前記シリンダ内の前記空気の質量を推定できるようにする第1のモデルfと、前記吸気圧力と2つの前記可変タイミングアクチュエータの前記位置との関数として前記シリンダ内の前記燃焼した気体の質量を推定できるようにする第2のモデルgと、を有する静的なシリンダ充填モデルによって決定され、前記第1のモデルfは前記吸気圧力に関して可逆な関数であり、前記第2のモデルgは2つの前記可変タイミングアクチュエータの前記位置に関して可逆な関数である、請求項1または2に記載の方法。
【図1】

【図2】

【図3】

【図2】
【図3】
【公開番号】特開2010−169095(P2010−169095A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2010−10245(P2010−10245)
【出願日】平成22年1月20日(2010.1.20)
【出願人】(591007826)イエフペ (261)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成22年1月20日(2010.1.20)
【出願人】(591007826)イエフペ (261)
【Fターム(参考)】
[ Back to top ]