
可変構造制御装置
【課題】可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図る。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
【解決手段】互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa及び目標値rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一連の制御において複数の相異なる制御目的を達成する可変構造制御装置に関する。
【背景技術】
【0002】
可変構造制御法である切り換え制御(例えば、下記特許文献1を参照)は、複数の制御器(コントローラ)を用意し、所定の条件に応じて制御対象プラントを制御する制御器を切り換える制御手法である。
【0003】
切り換え制御は、複数の制御指標に対応でき、単一構造の制御系に比して高速追従と高精度化との両立が容易、外乱抑圧特性及びロバスト性が向上するといった利点を有する。その一方で、制御器の切り換えに伴う不連続な状態変化に起因して過渡特性の劣化を招くという問題をも孕んでいる。
【0004】
切り換え時の初期状態がもたらす過渡特性の劣化に対しては、初期値補償用の付加入力を制御入力に重畳する改善法が提案されている(例えば、下記特許文献2を参照)。これは、切り換え時からのプラントの状態量の二乗積分値を評価関数とし、評価関数の値が最小となる付加入力を導出して制御器の切り換えの際に加味するというものである。
【0005】
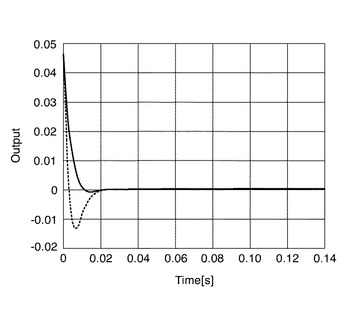
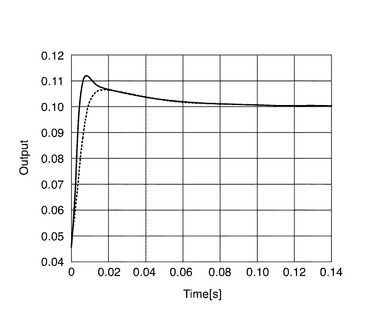
付加入力を利用した初期値補償法は、レギュレータ問題では充分な効能を発揮する。しかしながら、サーボ問題では必ずしもそうではない。図7及び図8に、位置制御系に初期値補償法を適用した例を示す。図7は、初期状態として位置0.05、速度−10を持つプラントをPID制御器により目標値0に制御するレギュレータ問題の時間応答である。図8は、同じく初期状態として位置0.05、速度−10を持つプラントをPID制御器により目標値1に制御するサーボ問題の時間応答である。両図ともに、実線は初期値補償を行った結果、破線は初期値補償を行わなかった結果である。目標値が0のレギュレータ問題では、初期値補償によって好適な追従性を得られている。翻って、目標値が0でないサーボ問題では、初期値補償により却って追従性が悪化していることが伺える。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特願2008−083279号明細書
【特許文献2】特開2008−181429号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の問題に鑑みてなされた本発明は、可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図ることを所期の目的とする。
【課題を解決するための手段】
【0008】
本発明では、互いに切り換え可能な複数の制御器を具備し、何れかの制御器から制御入力をプラントに入力してその制御出力を目標値若しくは目標軌跡に追従させるサーボ制御を行う可変構造制御装置がプラントを制御する制御器を切り換える際に、当該制御器から与えられる制御入力に、切り換え時のプラントの初期状態に対する過渡特性を補償する付加入力、及び、目標値若しくは目標軌跡に対する過渡特性を補償する付加入力を加えることとした。
【0009】
レギュレータ問題と異なり、目標値が0でないサーボ問題では、初期値補償量がそのまま補償なしの出力応答に加算されてしまう。そのために、初期値補償を行わない場合よりも制御出力が過度に行き過ぎたり、不足したりする。この点に着目して、切り換え時の目標値若しくは目標軌跡を考慮した付加入力を別途加えることにより、制御出力の行き過ぎや不足を抑制するようにしたのである。これにより、制御器の切り換え時の過渡特性、即ち制御出力の行き過ぎ量や定常偏差、目標値追従性を安定させることができ、高速追従と高精度化の双方を実現することができる。
【発明の効果】
【0010】
本発明によれば、可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性が良化する。
【図面の簡単な説明】
【0011】
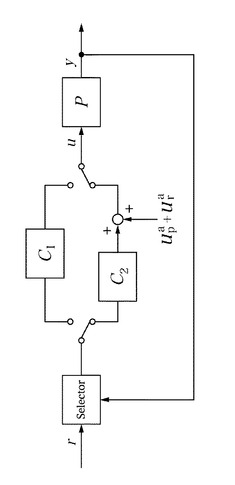
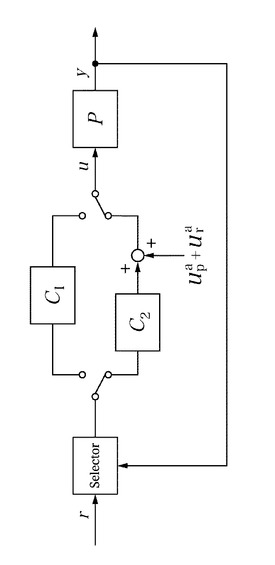
【図1】本発明の一実施形態に係る切り換え制御系のブロック線図。
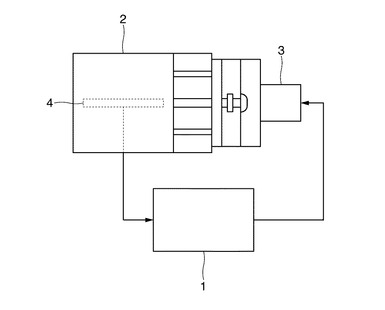
【図2】同実施形態の可変構造制御装置及びプラントのハードウェア資源構成例を示す図。
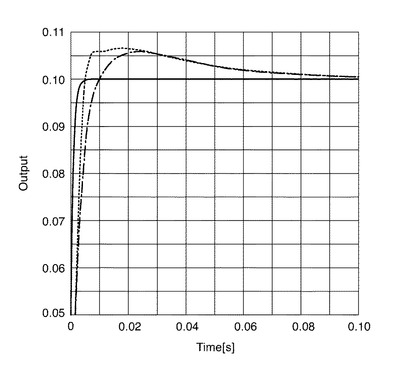
【図3】同実施形態の可変構造制御装置による制御のステップ応答を示すグラフ。
【図4】同実施形態の可変構造制御装置による制御の正弦波応答を示すグラフ。
【図5】図4の正弦波応答における追従誤差を示すグラフ。
【図6】本発明の変形例に係る外乱オブザーバを導入した切り換え制御系のブロック線図。
【図7】従来の初期値補償をレギュレータ問題に適用した結果を示すグラフ。
【図8】従来の初期値補償をサーボ問題に適用した結果を示すグラフ。
【発明を実施するための形態】
【0012】
本発明の一実施形態を、図面を参照して説明する。ここでは、複数の制御器C1、C2を具備し、それら制御器C1、C2の何れかを使用してプラントPをサーボ制御する切り換え制御系を想定している。各制御器C1、C2の構造及び制御器C1、C2の切り換え条件(制御モードの切り換え条件)は、任意である。図1に、本実施形態の切り換え制御系のブロック線図を示す。
【0013】
制御対象プラントPの状態空間表現を、式(数1)のように仮定する。
【0014】
【数1】

【0015】
u(k)はプラントPに与えられる制御入力、y(k)はプラントPの制御出力であり、xp(k)はプラントPの状態である。
【0016】
並びに、制御器の切り換えによって制御に使用されることになる制御器C2の状態空間表現を、式(数2)のように仮定する。
【0017】
【数2】
【0018】
r(k)はプラントPの制御出力の目標値若しくは目標軌跡であり、xc(k)は制御器C2の状態である。
【0019】
式(数1)及び式(数2)を結合すると、目標値r(k)から制御出力y(k)までの閉ループ系の状態方程式及び出力方程式(数3)を得ることができる。
【0020】
【数3】
【0021】
式(数3)を、制御器の切り換え時の初期状態xcp(0)を考慮してz変換すると、式(数4)となる。
【0022】
【数4】
【0023】
なお、上式(数4)では、下式(数5)の関係を用いている。
【0024】
【数5】
【0025】
以降、プラントPの初期状態補償用の付加入力upa及び目標値応答補償用の付加入力uraを、制御器C2による入力に重畳することを考える。これら付加入力upa(z)、ura(z)を加味した出力方程式は、式(数6)となる。
【0026】
【数6】
【0027】
Na(z)/D(z)は、付加入力upa(z)、ura(z)から出力y(z)までの伝達関数である。
【0028】
付加入力upa(z)は、従来通り、切り換え時のプラントPの初期状態xp(0)に対する過渡特性を補償するように決定する。式(数6)から、状態量に関連した項のみを考慮した出力yp(z)は、式(数7)のようになる。
【0029】
【数7】
【0030】
なお、切り換え時の制御器C2の状態量xc(0)=0としている。初期状態補償用の付加入力upa(z)を加えるのであれば、制御器C2の状態量という自由度を補償に利用する必要はないからである。
【0031】
付加入力upa(z)を式(数8)とおくと、出力yp(z)は式(数9)で表される。
【0032】
【数8】
【0033】
【数9】
【0034】
ds(z)に望ましい固有値dl(z)を陽に含ませて式(数10)とすると、式(数9)は式(数11)となる。
【0035】
【数10】
【0036】
【数11】
【0037】
しかして、式(数11)の右辺第一項における分子多項式の根が分母多項式の根に一致するように、d’(z)及びns(z)を決定する。例えば、Na(z)が不安定ゼロを含まないケースではd’(z)=Na(z)とすればよく、不安定ゼロを含むケースではそれを分離した上で不安定ゼロを含まない因数をd’(z)とすればよい。さすれば、下式(数12)が成立し、出力ypには望ましい固有値dlを持つモードのみが現れることとなる。
【0038】
【数12】
【0039】
つまり、制御器の切り換え時のプラントPの状態量xpから出力ypへの伝達特性を、希望の固有値dlに設定することが可能である。
【0040】
次いで、切り換え後の目標値r(z)に対する過渡特性を補償する付加入力ura(z)を決定する。式(数6)から、目標値に関連した項のみを考慮した出力yr(z)は、式(数13)のようになる。
【0041】
【数13】
【0042】
付加入力ura(z)を式(数14)とおくと、出力yr(z)は式(数15)で表される。
【0043】
【数14】
【0044】
【数15】
【0045】
dt(z)に望ましい固有値dm(z)を陽に含ませて式(数16)とすると、式(数15)は式(数17)となる。
【0046】
【数16】
【0047】
【数17】
【0048】
しかして、式(数17)の右辺第一項における分子多項式の根が分母多項式の根に一致するように、d’’(z)及びnt(z)を決定する。例えば、Na(z)が不安定ゼロを含まないケースではd’’(z)=Na(z)とすればよく、不安定ゼロを含むケースではそれを分離した上で不安定ゼロを含まない因数をd’’(z)とすればよい。そして、右辺第一項の商をkとすれば、下式(数18)が成立し、出力yrには望ましい固有値dmを持つモードのみが現れることとなる。
【0049】
【数18】
【0050】
つまり、制御器の切り換え時の目標値rから出力yrへの伝達特性を、希望の固有値dmに設定することが可能である。
【0051】
尤も、目標値rから出力yrへの定常ゲインは1ではない。故に、式(数19)に示すようにr(z)からyr(z)へのパスに補正ゲインkaを導入して、定常ゲインが1に近づくkaを設定する必要があることに留意する。
【0052】
【数19】
【0053】
この補正ゲインkaは下式(数20)、即ちk/dm(z)の定常値の逆数である。
【0054】
【数20】
【0055】
本実施形態の可変構造制御装置を位置制御系に適用したシミュレーション実験の結果を示す。図2に示すように、位置制御系のプラントPは、例えば、ガイドに沿って所定方向に進退移動し得るステージ2を備えた精密ステージである。ステージ2は、超音波モータに代表されるアクチュエータ3により駆動される。ステージ2の現在位置は、リニアスケールを読み取るリニアエンコーダ等の計測器4を介して計測される。制御装置1は、計測器4が出力するステージ位置信号(制御出力y)を受信し、ステージ2を目標位置(目標値r)に位置づけるべくアクチュエータ3に制御信号(制御入力u)を入力する。
【0056】
図3は、ステップ指令に対する応答波形である。プラントPの初期状態は位置0.05、速度−10とし、位置の目標値は1としている。実線は初期状態xp(0)及び目標値rを考慮した付加入力(upa+ura)を伴う制御の結果、破線は初期状態xp(0)のみを考慮した付加入力upaを伴う制御の結果、一点鎖線は付加入力を伴わない固定PID制御の結果である。目標値rをも考慮する本実施形態の補償法は、制御器の切り換え時の過渡応答を所望の特性に設定でき、かつ定常偏差なく目標値rに追従できるものであることが確認された。
【0057】
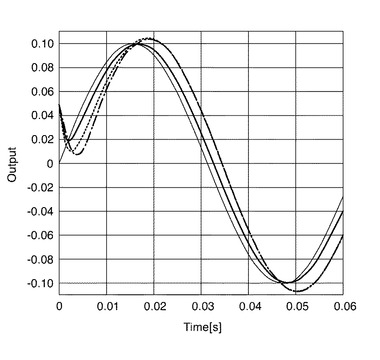
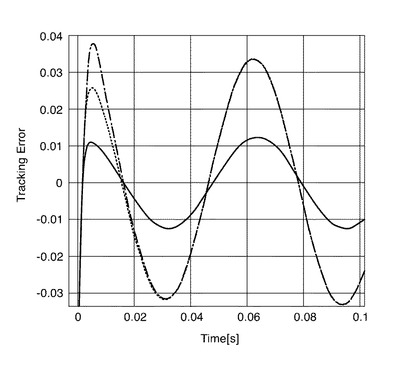
図4は、正弦波指令に対する応答波形である。プラントPの初期状態は位置0.05、速度−10とし、目標値の振幅は0.1、周波数は100rad/sとしている。細線は目標値r、実線は付加入力(upa+ura)を伴う制御の結果、破線は付加入力upaを伴う制御の結果、一点鎖線は付加入力を伴わない固定PID制御の結果である。また、図5は、同正弦波指令に対する追従誤差である。目標値rを考慮しない従来の補償法は、状態量の初期値xp(0)に対する補償を行うだけであり、定常的には追従誤差が固定PID制御並に拡大する。本実施形態の補償法は、目標軌跡rに対する補償を行うことで過渡状態に加えて定常状態でも追従特性が改善される。本実施形態の補償法を採用すれば、加速度軌跡を有する目標値指令であっても良好な追従性を得られる。
【0058】
本実施形態によれば、互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値若しくは目標軌跡rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に、切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa、及び、目標値若しくは目標軌跡rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとしたため、目標値が0でないサーボ問題での制御出力yの行き過ぎや不足が適切に抑制され、所望の過渡特性を実現できるとともに目標値追従性が改善する。
【0059】
さらに、式(数19)及び(数20)に示しているように、目標値若しくは目標軌跡rから制御出力yrへの伝達関数の定常ゲインを1に近づける補正ゲインkaを乗じているため、特に定常偏差が縮小する。
【0060】
なお、本発明は以上に詳述した実施形態に限られるものではない。図1のブロック線図では、制御器がC1からC2に切り換わったときに制御器C2の制御入力に付加入力(upa+ura)を加える態様を表示しているが、制御器がC2からC1に切り換わったときにも同様に導出した付加入力を制御器C1の制御入力に加えてよい。
【0061】
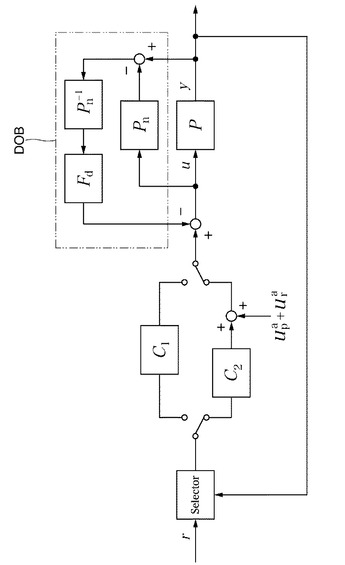
付加入力(upa+ura)の導出には、プラントPのモデルの特性が用いられる。このモデルにモデル化誤差(摂動)が存在するおそれは常にある。モデル化誤差を低減し、ひいては付加入力の有効性を高めるためには、外乱オブザーバDOBを併用することが好ましい。外乱オブザーバDOBは、プラントPに与える制御入力uとプラントPの制御出力yとから、モデル化誤差及び外乱をひとまとめにした誤差項を推定し、その誤差項を制御入力uにフィードバック補償することでモデル化誤差及び外乱の影響を抑制するものである。図6に、外乱オブザーバDOBを導入した制御系のブロック線図を示す。PnはプラントPのノミナルモデル、Fdは低域通過フィルタである。図6からも明らかなように、付加入力(upa+ura)による初期値補償と外乱オブザーバDOBによるフィードバック補償とは分離できるため、外乱オブザーバDOBを導入したとしても付加入力(upa+ura)の導出方法に特に変更はなく、併用は容易である。外乱オブザーバDOB自体は既知の設計方法に則って設計することができるので、ここでは説明を省略する。
【0062】
その他、各部の具体的構成は本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【産業上の利用可能性】
【0063】
本発明は、例えば、トラッキング制御及びフォロイング制御、振動制御及び位置決め制御等の、一連の制御において複数の相異なる制御目的を達成するための制御コントローラとして利用することができる。
【符号の説明】
【0064】
1…可変構造制御装置
C1、C2…制御器
DOB…外乱オブザーバ
P…プラント
upa…プラントの初期状態に対する過渡特性を補償する付加入力
ura…目標値若しくは目標軌跡に対する過渡特性を補償する付加入力
ka…補正ゲイン
【技術分野】
【0001】
本発明は、一連の制御において複数の相異なる制御目的を達成する可変構造制御装置に関する。
【背景技術】
【0002】
可変構造制御法である切り換え制御(例えば、下記特許文献1を参照)は、複数の制御器(コントローラ)を用意し、所定の条件に応じて制御対象プラントを制御する制御器を切り換える制御手法である。
【0003】
切り換え制御は、複数の制御指標に対応でき、単一構造の制御系に比して高速追従と高精度化との両立が容易、外乱抑圧特性及びロバスト性が向上するといった利点を有する。その一方で、制御器の切り換えに伴う不連続な状態変化に起因して過渡特性の劣化を招くという問題をも孕んでいる。
【0004】
切り換え時の初期状態がもたらす過渡特性の劣化に対しては、初期値補償用の付加入力を制御入力に重畳する改善法が提案されている(例えば、下記特許文献2を参照)。これは、切り換え時からのプラントの状態量の二乗積分値を評価関数とし、評価関数の値が最小となる付加入力を導出して制御器の切り換えの際に加味するというものである。
【0005】
付加入力を利用した初期値補償法は、レギュレータ問題では充分な効能を発揮する。しかしながら、サーボ問題では必ずしもそうではない。図7及び図8に、位置制御系に初期値補償法を適用した例を示す。図7は、初期状態として位置0.05、速度−10を持つプラントをPID制御器により目標値0に制御するレギュレータ問題の時間応答である。図8は、同じく初期状態として位置0.05、速度−10を持つプラントをPID制御器により目標値1に制御するサーボ問題の時間応答である。両図ともに、実線は初期値補償を行った結果、破線は初期値補償を行わなかった結果である。目標値が0のレギュレータ問題では、初期値補償によって好適な追従性を得られている。翻って、目標値が0でないサーボ問題では、初期値補償により却って追従性が悪化していることが伺える。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特願2008−083279号明細書
【特許文献2】特開2008−181429号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の問題に鑑みてなされた本発明は、可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性の良化を図ることを所期の目的とする。
【課題を解決するための手段】
【0008】
本発明では、互いに切り換え可能な複数の制御器を具備し、何れかの制御器から制御入力をプラントに入力してその制御出力を目標値若しくは目標軌跡に追従させるサーボ制御を行う可変構造制御装置がプラントを制御する制御器を切り換える際に、当該制御器から与えられる制御入力に、切り換え時のプラントの初期状態に対する過渡特性を補償する付加入力、及び、目標値若しくは目標軌跡に対する過渡特性を補償する付加入力を加えることとした。
【0009】
レギュレータ問題と異なり、目標値が0でないサーボ問題では、初期値補償量がそのまま補償なしの出力応答に加算されてしまう。そのために、初期値補償を行わない場合よりも制御出力が過度に行き過ぎたり、不足したりする。この点に着目して、切り換え時の目標値若しくは目標軌跡を考慮した付加入力を別途加えることにより、制御出力の行き過ぎや不足を抑制するようにしたのである。これにより、制御器の切り換え時の過渡特性、即ち制御出力の行き過ぎ量や定常偏差、目標値追従性を安定させることができ、高速追従と高精度化の双方を実現することができる。
【発明の効果】
【0010】
本発明によれば、可変構造制御装置を用いたサーボ制御における、制御器の切り換え時の過渡特性が良化する。
【図面の簡単な説明】
【0011】
【図1】本発明の一実施形態に係る切り換え制御系のブロック線図。
【図2】同実施形態の可変構造制御装置及びプラントのハードウェア資源構成例を示す図。
【図3】同実施形態の可変構造制御装置による制御のステップ応答を示すグラフ。
【図4】同実施形態の可変構造制御装置による制御の正弦波応答を示すグラフ。
【図5】図4の正弦波応答における追従誤差を示すグラフ。
【図6】本発明の変形例に係る外乱オブザーバを導入した切り換え制御系のブロック線図。
【図7】従来の初期値補償をレギュレータ問題に適用した結果を示すグラフ。
【図8】従来の初期値補償をサーボ問題に適用した結果を示すグラフ。
【発明を実施するための形態】
【0012】
本発明の一実施形態を、図面を参照して説明する。ここでは、複数の制御器C1、C2を具備し、それら制御器C1、C2の何れかを使用してプラントPをサーボ制御する切り換え制御系を想定している。各制御器C1、C2の構造及び制御器C1、C2の切り換え条件(制御モードの切り換え条件)は、任意である。図1に、本実施形態の切り換え制御系のブロック線図を示す。
【0013】
制御対象プラントPの状態空間表現を、式(数1)のように仮定する。
【0014】
【数1】
【0015】
u(k)はプラントPに与えられる制御入力、y(k)はプラントPの制御出力であり、xp(k)はプラントPの状態である。
【0016】
並びに、制御器の切り換えによって制御に使用されることになる制御器C2の状態空間表現を、式(数2)のように仮定する。
【0017】
【数2】
【0018】
r(k)はプラントPの制御出力の目標値若しくは目標軌跡であり、xc(k)は制御器C2の状態である。
【0019】
式(数1)及び式(数2)を結合すると、目標値r(k)から制御出力y(k)までの閉ループ系の状態方程式及び出力方程式(数3)を得ることができる。
【0020】
【数3】
【0021】
式(数3)を、制御器の切り換え時の初期状態xcp(0)を考慮してz変換すると、式(数4)となる。
【0022】
【数4】
【0023】
なお、上式(数4)では、下式(数5)の関係を用いている。
【0024】
【数5】
【0025】
以降、プラントPの初期状態補償用の付加入力upa及び目標値応答補償用の付加入力uraを、制御器C2による入力に重畳することを考える。これら付加入力upa(z)、ura(z)を加味した出力方程式は、式(数6)となる。
【0026】
【数6】
【0027】
Na(z)/D(z)は、付加入力upa(z)、ura(z)から出力y(z)までの伝達関数である。
【0028】
付加入力upa(z)は、従来通り、切り換え時のプラントPの初期状態xp(0)に対する過渡特性を補償するように決定する。式(数6)から、状態量に関連した項のみを考慮した出力yp(z)は、式(数7)のようになる。
【0029】
【数7】
【0030】
なお、切り換え時の制御器C2の状態量xc(0)=0としている。初期状態補償用の付加入力upa(z)を加えるのであれば、制御器C2の状態量という自由度を補償に利用する必要はないからである。
【0031】
付加入力upa(z)を式(数8)とおくと、出力yp(z)は式(数9)で表される。
【0032】
【数8】
【0033】
【数9】
【0034】
ds(z)に望ましい固有値dl(z)を陽に含ませて式(数10)とすると、式(数9)は式(数11)となる。
【0035】
【数10】
【0036】
【数11】
【0037】
しかして、式(数11)の右辺第一項における分子多項式の根が分母多項式の根に一致するように、d’(z)及びns(z)を決定する。例えば、Na(z)が不安定ゼロを含まないケースではd’(z)=Na(z)とすればよく、不安定ゼロを含むケースではそれを分離した上で不安定ゼロを含まない因数をd’(z)とすればよい。さすれば、下式(数12)が成立し、出力ypには望ましい固有値dlを持つモードのみが現れることとなる。
【0038】
【数12】
【0039】
つまり、制御器の切り換え時のプラントPの状態量xpから出力ypへの伝達特性を、希望の固有値dlに設定することが可能である。
【0040】
次いで、切り換え後の目標値r(z)に対する過渡特性を補償する付加入力ura(z)を決定する。式(数6)から、目標値に関連した項のみを考慮した出力yr(z)は、式(数13)のようになる。
【0041】
【数13】
【0042】
付加入力ura(z)を式(数14)とおくと、出力yr(z)は式(数15)で表される。
【0043】
【数14】
【0044】
【数15】
【0045】
dt(z)に望ましい固有値dm(z)を陽に含ませて式(数16)とすると、式(数15)は式(数17)となる。
【0046】
【数16】
【0047】
【数17】
【0048】
しかして、式(数17)の右辺第一項における分子多項式の根が分母多項式の根に一致するように、d’’(z)及びnt(z)を決定する。例えば、Na(z)が不安定ゼロを含まないケースではd’’(z)=Na(z)とすればよく、不安定ゼロを含むケースではそれを分離した上で不安定ゼロを含まない因数をd’’(z)とすればよい。そして、右辺第一項の商をkとすれば、下式(数18)が成立し、出力yrには望ましい固有値dmを持つモードのみが現れることとなる。
【0049】
【数18】
【0050】
つまり、制御器の切り換え時の目標値rから出力yrへの伝達特性を、希望の固有値dmに設定することが可能である。
【0051】
尤も、目標値rから出力yrへの定常ゲインは1ではない。故に、式(数19)に示すようにr(z)からyr(z)へのパスに補正ゲインkaを導入して、定常ゲインが1に近づくkaを設定する必要があることに留意する。
【0052】
【数19】
【0053】
この補正ゲインkaは下式(数20)、即ちk/dm(z)の定常値の逆数である。
【0054】
【数20】
【0055】
本実施形態の可変構造制御装置を位置制御系に適用したシミュレーション実験の結果を示す。図2に示すように、位置制御系のプラントPは、例えば、ガイドに沿って所定方向に進退移動し得るステージ2を備えた精密ステージである。ステージ2は、超音波モータに代表されるアクチュエータ3により駆動される。ステージ2の現在位置は、リニアスケールを読み取るリニアエンコーダ等の計測器4を介して計測される。制御装置1は、計測器4が出力するステージ位置信号(制御出力y)を受信し、ステージ2を目標位置(目標値r)に位置づけるべくアクチュエータ3に制御信号(制御入力u)を入力する。
【0056】
図3は、ステップ指令に対する応答波形である。プラントPの初期状態は位置0.05、速度−10とし、位置の目標値は1としている。実線は初期状態xp(0)及び目標値rを考慮した付加入力(upa+ura)を伴う制御の結果、破線は初期状態xp(0)のみを考慮した付加入力upaを伴う制御の結果、一点鎖線は付加入力を伴わない固定PID制御の結果である。目標値rをも考慮する本実施形態の補償法は、制御器の切り換え時の過渡応答を所望の特性に設定でき、かつ定常偏差なく目標値rに追従できるものであることが確認された。
【0057】
図4は、正弦波指令に対する応答波形である。プラントPの初期状態は位置0.05、速度−10とし、目標値の振幅は0.1、周波数は100rad/sとしている。細線は目標値r、実線は付加入力(upa+ura)を伴う制御の結果、破線は付加入力upaを伴う制御の結果、一点鎖線は付加入力を伴わない固定PID制御の結果である。また、図5は、同正弦波指令に対する追従誤差である。目標値rを考慮しない従来の補償法は、状態量の初期値xp(0)に対する補償を行うだけであり、定常的には追従誤差が固定PID制御並に拡大する。本実施形態の補償法は、目標軌跡rに対する補償を行うことで過渡状態に加えて定常状態でも追従特性が改善される。本実施形態の補償法を採用すれば、加速度軌跡を有する目標値指令であっても良好な追従性を得られる。
【0058】
本実施形態によれば、互いに切り換え可能な複数の制御器C1、C2を具備し、プラントPの制御出力yを目標値若しくは目標軌跡rに追従させるサーボ制御を行う可変構造制御装置において、プラントPを制御する制御器をC2に切り換える際、当該制御器C2による制御入力に、切り換え時のプラントPの初期状態に対する過渡特性を補償する付加入力upa、及び、目標値若しくは目標軌跡rに対する過渡特性を補償する付加入力uraを重畳した入力uをプラントPに与えることとしたため、目標値が0でないサーボ問題での制御出力yの行き過ぎや不足が適切に抑制され、所望の過渡特性を実現できるとともに目標値追従性が改善する。
【0059】
さらに、式(数19)及び(数20)に示しているように、目標値若しくは目標軌跡rから制御出力yrへの伝達関数の定常ゲインを1に近づける補正ゲインkaを乗じているため、特に定常偏差が縮小する。
【0060】
なお、本発明は以上に詳述した実施形態に限られるものではない。図1のブロック線図では、制御器がC1からC2に切り換わったときに制御器C2の制御入力に付加入力(upa+ura)を加える態様を表示しているが、制御器がC2からC1に切り換わったときにも同様に導出した付加入力を制御器C1の制御入力に加えてよい。
【0061】
付加入力(upa+ura)の導出には、プラントPのモデルの特性が用いられる。このモデルにモデル化誤差(摂動)が存在するおそれは常にある。モデル化誤差を低減し、ひいては付加入力の有効性を高めるためには、外乱オブザーバDOBを併用することが好ましい。外乱オブザーバDOBは、プラントPに与える制御入力uとプラントPの制御出力yとから、モデル化誤差及び外乱をひとまとめにした誤差項を推定し、その誤差項を制御入力uにフィードバック補償することでモデル化誤差及び外乱の影響を抑制するものである。図6に、外乱オブザーバDOBを導入した制御系のブロック線図を示す。PnはプラントPのノミナルモデル、Fdは低域通過フィルタである。図6からも明らかなように、付加入力(upa+ura)による初期値補償と外乱オブザーバDOBによるフィードバック補償とは分離できるため、外乱オブザーバDOBを導入したとしても付加入力(upa+ura)の導出方法に特に変更はなく、併用は容易である。外乱オブザーバDOB自体は既知の設計方法に則って設計することができるので、ここでは説明を省略する。
【0062】
その他、各部の具体的構成は本発明の趣旨を逸脱しない範囲で種々変形が可能である。
【産業上の利用可能性】
【0063】
本発明は、例えば、トラッキング制御及びフォロイング制御、振動制御及び位置決め制御等の、一連の制御において複数の相異なる制御目的を達成するための制御コントローラとして利用することができる。
【符号の説明】
【0064】
1…可変構造制御装置
C1、C2…制御器
DOB…外乱オブザーバ
P…プラント
upa…プラントの初期状態に対する過渡特性を補償する付加入力
ura…目標値若しくは目標軌跡に対する過渡特性を補償する付加入力
ka…補正ゲイン
【特許請求の範囲】
【請求項1】
互いに切り換え可能な複数の制御器を具備し、何れかの制御器から制御入力をプラントに入力してその制御出力を目標値若しくは目標軌跡に追従させるサーボ制御を行う可変構造制御装置において、
プラントを制御する制御器を切り換える際、当該制御器から与えられる制御入力に、切り換え時のプラントの初期状態に対する過渡特性を補償する付加入力、及び、目標値若しくは目標軌跡に対する過渡特性を補償する付加入力を加えた上でプラントに入力することを特徴とする可変構造制御装置。
【請求項2】
目標値若しくは目標軌跡から制御出力への伝達関数の定常ゲインを1に近づける補正ゲインを乗ずる請求項1記載の可変構造制御装置。
【請求項3】
プラントのモデル化誤差を低減する外乱オブザーバを導入している請求項1または2記載の可変構造制御装置。
【請求項1】
互いに切り換え可能な複数の制御器を具備し、何れかの制御器から制御入力をプラントに入力してその制御出力を目標値若しくは目標軌跡に追従させるサーボ制御を行う可変構造制御装置において、
プラントを制御する制御器を切り換える際、当該制御器から与えられる制御入力に、切り換え時のプラントの初期状態に対する過渡特性を補償する付加入力、及び、目標値若しくは目標軌跡に対する過渡特性を補償する付加入力を加えた上でプラントに入力することを特徴とする可変構造制御装置。
【請求項2】
目標値若しくは目標軌跡から制御出力への伝達関数の定常ゲインを1に近づける補正ゲインを乗ずる請求項1記載の可変構造制御装置。
【請求項3】
プラントのモデル化誤差を低減する外乱オブザーバを導入している請求項1または2記載の可変構造制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−198517(P2010−198517A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−45014(P2009−45014)
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【出願人】(504145364)国立大学法人群馬大学 (352)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月27日(2009.2.27)
【出願人】(000002967)ダイハツ工業株式会社 (2,560)
【出願人】(504145364)国立大学法人群馬大学 (352)
【Fターム(参考)】
[ Back to top ]