
可変焦点型光学装置
【課題】 光走査部の光学手段の焦点距離を可変として、照射対象物に照射する光ビームの焦点位置を、光学部品を設けることなく調整可能とした可変焦点型光学装置を提供する。
【解決手段】 固定部11にトーションバー12,12を介して軸支した可動部13に反射ミラー又はレンズからなる光学手段14とヒータコイルを兼ねる駆動コイル15を設け、駆動コイル15に静磁界発生手段17A,17Bにより静磁界を作用させる光走査部3を備え、駆動コイル15に、駆動電流に重畳して可動部加熱用のヒータ電流を供給制御して、可動部13の変形量を制御して光学手段14の焦点距離を可変する構成とした。
【解決手段】 固定部11にトーションバー12,12を介して軸支した可動部13に反射ミラー又はレンズからなる光学手段14とヒータコイルを兼ねる駆動コイル15を設け、駆動コイル15に静磁界発生手段17A,17Bにより静磁界を作用させる光走査部3を備え、駆動コイル15に、駆動電流に重畳して可動部加熱用のヒータ電流を供給制御して、可動部13の変形量を制御して光学手段14の焦点距離を可変する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、固定部に梁部を介して可動可能に支持された可動部に固定した光学手段の焦点距離を可変できる可変焦点型光学装置に関する。
【背景技術】
【0002】
従来、固定部に梁部を介して可動可能に支持された可動部に光学手段を設け、可動部を介して光学手段を可動させることにより、例えば光走査するような光学装置として、例えば半導体製造技術を利用して製造するプレーナ型光学装置があり、光学手段として反射ミラーを用いる光反射型と光学手段としてレンズを用いる光透過型がある。
【0003】
光反射型の一例としては、例えば、固定部に、梁部を介して回動可能に可動部を軸支し、可動部に設けた駆動コイルと、この駆動コイルに静磁界を作用する静磁界発生手段とで可動部の駆動手段を構成し、通電により駆動コイルに発生する磁界と静磁界との相互作用により発生するローレンツ力を利用して可動部を梁部を中心として回動することにより、反射ミラーを回動させ光ビームを偏向するものがある(例えば、特許文献1参照)。
【0004】
また、光透過型の一例としては、例えば、可動部をH状の梁部で支持し、梁部を可動電極とし、梁部の回りに固定電極を配置し、梁部(可動電極)と固定電極との間に静電引力を発生させ、可動部を介してレンズを変位させることにより、レンズの屈折作用を利用してレンズを透過する光ビームを偏向するものがある(例えば、非特許文献1参照)。
【特許文献1】特許第2722314号公報
【非特許文献1】猿田訓彦,藤田博之, 年吉 洋 「SOI基板によるマイクロレンズ光スキャナの製作」電気学会E部門論文誌,2003年7月,第123巻7号, pp. 231-236
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、光スキャナや光ディスク装置等の光学機器においては、光学手段で反射又は屈折された光ビームの焦点位置を光軸方向に調整して所定の位置に合わせる必要がある。しかし、従来のこの種の光学装置には、反射ミラーやレンズの焦点距離(曲率半径)を可変できるものはなかった。このため、この種の光学装置を光スキャナや光ディスク装置等の光学機器に実装する場合、従来では、光ビームの焦点位置が適切な位置となるよう、光ビームの光路にコリメータレンズ、集光レンズ、或いは、f−θレンズ等の光学部品を設ける必要があった。
【0006】
本発明は前記問題点に着目してなされたもので、光学手段からの光ビームの焦点位置を光学部品を設けることなく調整可能とした可変焦点型光学装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
このため、請求項1の発明の可変焦点型光学装置は、固定部に梁部を介して可動可能に支持された可動部と、該可動部を駆動する駆動手段と、前記可動部に固定され入射する光ビームを屈折又は反射する光学手段と、該光学手段の焦点距離を可変制御する制御手段とを備えて構成した。
かかる構成では、駆動手段で可動部を固定部に対して可動して光学手段を駆動しつつ、制御手段により光学手段の焦点距離を可変できるようになる。
【0008】
制御手段は、請求項2のように、前記光学手段の変形量を制御して前記光学手段の曲率半径を可変制御する構成とするとよい。
具体的には、請求項3のように、前記制御手段は、前記可動部を加熱制御して当該可動部と共に変形する前記光学手段の変形量を制御する構成とする。この場合、請求項4のように、可動部にヒータを設けて可動部を加熱制御する構成としてもよく、請求項6のように、可動部にレーザ光を照射して可動部を加熱制御する構成としてもよい。
【0009】
請求項4の構成においては、請求項5のように、前記駆動手段が、前記可動部に敷設されて通電により磁界を発生する駆動コイルと、前記梁部の軸方向と平行な可動部対辺部に位置する駆動コイル部分に対して静磁界を作用する静磁界発生手段とを備え、前記可動部対辺部に位置する駆動コイル部分に発生する磁界と前記静磁界との相互作用により前記可動部対辺部に電磁力を作用させる構成であるとき、前記駆動コイルが前記ヒータを兼ねる構成とするとよい。
【0010】
請求項7の発明では、前記可動部に形状記憶金属を設け、該形状記憶金属を加熱する構成とした。
また、制御手段は、請求項8のように、圧電体により前記光学手段の変形量を制御する構成とするとよい。
【0011】
請求項9の発明では、前記制御手段は、前記焦点距離の目標値を入力する入力部と、前記光学手段の各焦点距離に対応する光学手段の変形制御量データを予め記憶する記憶部と、該記憶部の記憶データに基づいて入力された前記目標値に対応する変形制御量を決定して光学手段を変形制御する制御部とを備える構成とした。
【0012】
この場合、請求項10のように、前記光学手段の実際の焦点距離を検出する検出手段を設け、前記制御部は、前記検出手段の検出値と前記目標値とを比較して前記検出値が前記目標値と一致するように前記変形制御量をフィードバック制御する構成とするとよい。
【発明の効果】
【0013】
以上説明したように本発明の可変焦点型光学装置によれば、光学手段の曲率半径を可変制御して焦点距離を可変できるよう構成したので、例えば光学機器に実装した場合に光ビームの焦点位置が所定位置となるよう光学装置自体で調整でき、焦点位置調整用レンズ等を別途設ける必要がなくなる。従って、光学機器の部品点数の削減や構成の簡素化を図ることができると共に、設計の自由度を高めることができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図面に基づいて説明する。
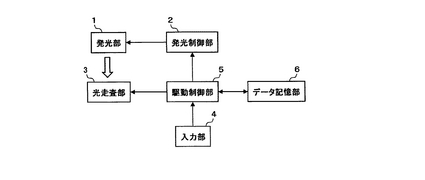
図1に、本発明に係る可変焦点型光学装置の第1実施形態の構成図を示し、図2に第1実施形態の要部である光走査部の平面図を示す。
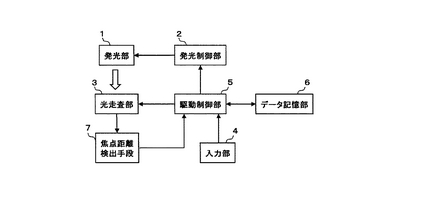
図1において、本実施形態の可変焦点型光学装置は、発光部1と、発光制御部2と、光走査部3と、入力部4と、駆動制御部5と、データ記憶部6と、を備えて構成される。
【0015】
前記発光部1は、光走査部3に光ビームを発射するもので、例えばレーザ光を発光するレーザ光源等、光を発光できるものであればどのような光源でもよい。
前記発光制御部2は、発光部1を駆動制御するもので、後述する光走査部3の走査角度に合わせて発光部1の発光タイミングを制御する。具体的には、例えば、発光制御部2は、駆動制御部5から送信される後述の可動部駆動電流値と可動部13の走査角度との対応データを格納したメモリを備え、入力した可動部駆動電流値から可動部13の走査角度をメモリから読込み、予め設定した走査角度範囲で発光部1に所定間隔で発光指令を送信する。
【0016】
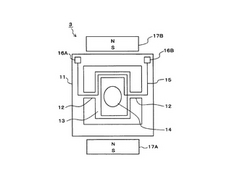
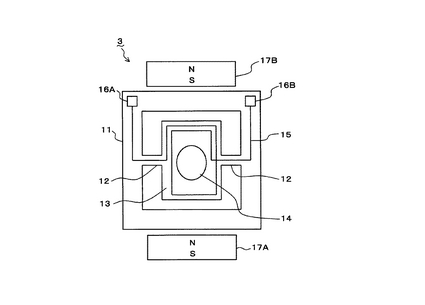
前記光走査部3は、発光部1から発射された光ビームを走査するもので、例えば半導体マイクロマシン技術を応用して製造されるプレーナ型アクチュエータを用いる。図2に本実施形態の光走査部3の平面図を示し説明する。
【0017】
図2において、本実施形態の光走査部3は、枠状の固定部11に、梁部としての一対のトーションバー12,12を介して可動部13が可動可能に軸支される。これら固定部11、トーションバー12,12及び可動部13は、例えばシリコン基板をエッチングして一体的に形成される。可動部13の表面には、その中央部に光学手段14が設けられ、周縁部に光学手段14を囲むようにして光学手段14の変形量を制御してその曲率半径を可変制御すべく可動部13を加熱するヒータを兼ねる駆動コイル15が設けられる。駆動コイル15は、トーションバー部分を介して固定部11側に引き出されて電極端子16A,16Bに接続して加熱電流及び駆動電流が供給される。尚、駆動コイルとは別に加熱用ヒータコイルを可動部13に設けるようにしてもよい。また、固定部11の外側に、トーションバー12,12の軸方向と平行な可動部対辺部の駆動コイル部分に静磁界を作用する一対の静磁界発生手段17A,17Bが、可動部13を挟んで互いに反対磁極を対向させて配置される。静磁界発生手段17A,17Bは、永久磁石でも電磁石でもよい。
【0018】
ここで、前記光学手段14は、発光部1から発射される光ビームを反射する反射ミラーでもよく、前記光ビームを透過屈折するレンズでもよい。反射ミラーの場合は、アルミニウムや金等を可動部13上に蒸着して形成する。また、レンズの場合は、個別に加工したものを可動部13に貫通孔を形成して取付けるようにしてもよく、可動部13に透明樹脂を滴下して表面張力により可動部13上に形成するようにしてもよい。レンズの材料としては熱や外圧により変形可能な材料、例えば高分子材料やシリコン等を用いる。尚、光学手段14としてレンズを利用した場合は、光ビームの走査側と反対側に発光部1を配置することになるので、通常は可動部13のレンズ取付け部に光ビーム通過用の貫通孔を設ける必要があるが、可動部13が光ビームの透過可能な材質である場合には貫通孔を設ける必要はない。
【0019】
この光走査部3の駆動原理は例えば特許第2722314号等で詳述されており、ここでは簡単に説明する。
可動部13上の駆動コイル15に電流を流すと磁界が発生し、この磁界と静磁界発生手段17A,17Bによる静磁界との相互作用によりローレンツ力が発生し、トーションバー12,12の軸方向と平行な可動部対辺部に互いに逆方向の回転力が発生し、トーションバー12,12のばね力と発生した回転力とが釣合う位置まで可動部13は回動する。駆動コイル15に交流電流を流せば可動部13を介して光学手段14が揺動し、発光部1から照射された光ビームを走査できる。発生する回転力は、駆動コイル15に流す電流値に比例するので、駆動コイル15の電流値を制御することで可動部13の揺動角度(光ビームの走査角度)を制御できる。ここで、駆動コイル15と静磁界発生手段17A,17Bで駆動手段を構成する。
【0020】
前記入力部4は、光学手段14の焦点距離の目標値を入力するものであり、光ビームの照射対象物までの距離が固定値で変化しないような場合は手動で目標値を入力する、例えばキーボード等を用いることができる。また、光ビームの照射対象物までの距離が常時変化するような場合は対象物までの距離検出が可能な測距装置を用いてその検出値を目標値として入力するようにすればよい。
【0021】
前記駆動制御部5は、光走査部3の駆動及び光学手段14の焦点距離を可変制御すべく可動部13を加熱制御するものであり、駆動コイル15に供給する可動部駆動用交流電流を制御すると共に、入力部4から入力される目標値とデータ記憶部6の記憶データとに基づいて前記交流電流に重畳する可動部加熱用の直流電流を供給制御し光学手段14の変形量を制御して曲率半径を可変制御しその焦点距離を目標値に制御する。また、光走査部3は、前述したように可動部13の回転力が駆動コイル15に供給する駆動電流に比例し、前記駆動電流値から可動部13の走査位置(走査角度)が分かるので、駆動制御部5は、前記駆動電流値を発光部1の発光タイミング制御用信号として発光制御部2に送信する。尚、光走査部3の走査角度を、例えば可動部裏面側にミラーを設けてその反射光を受光素子アレイ等で受光しその受光位置から検出するような走査角度検出装置を、駆動制御部5とは別に設け、この走査角度検出装置で走査角度を直接検出しその検出値を発光タイミング制御用信号として発光制御部2に送信するようにしてもよい。この場合、発光制御部2において、前述した可動部駆動電流値と可動部13の走査角度との対応データを格納したメモリは不要である。
【0022】
前記データ記憶部6は、予め実験等で計測した、光学手段14の各焦点距離に対応する光学手段14の変形制御量データを予め記憶する記憶部であり、具体的には、光学手段14の各焦点距離に対応する光学手段14の変形制御量データとして可動部加熱用の前記直流電流値データが、各焦点距離データと対応付けられて記憶されている。
【0023】
次に、本実施形態の可変焦点型光学装置の動作を説明する。
光走査部3の可動部13の振れ角制御は、従来と同様であり、駆動制御部5から駆動コイル15に交流電流を供給制御して可動部13を共振駆動する。発光制御部2は、駆動制御部5から送信される前記交流電流値に基づいてメモリから可動部13の走査角度を読取り、予め設定された走査角度範囲で発光部1に発光指令を間欠的に出力する。発光部1は、前記発光指令の入力毎に光ビームを発光する。これにより、光走査部3の可動部13の揺動動作により光ビームが所定の走査範囲で走査される。
【0024】
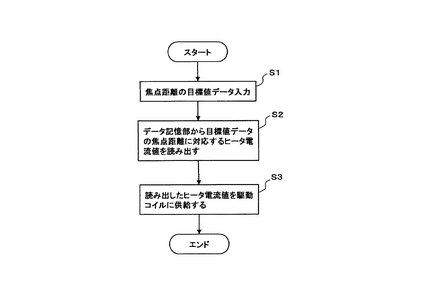
次に、図3のフローチャートを参照して本発明の特徴である光学手段14の焦点距離制御動作を説明する。
ステップ1(図中S1で示し、以下同様とする)では、入力部4で焦点距離の目標値データを入力する。例えば、可動部13の走査角度とその時の焦点距離値を目標値データとして入力する。
ステップ2では、ステップ1で入力された目標値データの各焦点距離値に対応するヒータ電流値(直流電流値)を、駆動制御部5はデータ記憶部6から読み出し、各走査角度と対応付けて記憶する。
ステップ3では、駆動制御部5は、予め記憶してある駆動電流値と走査角度の対応データに基づいて駆動電流値から走査角度を読み出し、当該読み出した走査角度に対応する直流電流値を、ステップ2で読み出し記憶したヒータ電流値と走査角度との対応データから読み出し、当該読み出した直流電流値を可動部駆動用の交流電流に重畳して駆動コイル15に供給して可動部13を加熱制御する。駆動コイルとヒータコイルが別々の場合は、それぞれのコイルに駆動電流と加熱電流を供給すればよいことは言うまでもない。
【0025】
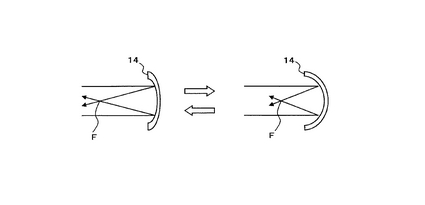
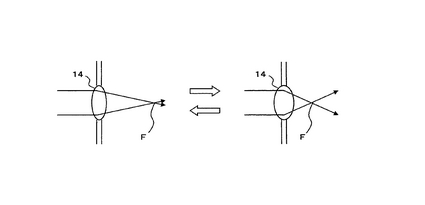
これにより、可動部13が供給されるヒータ電流量に応じて変形する。例えば、光学手段14が反射ミラーの場合は、図4のように可動部13が変形してその反り量が変化し反射ミラー14の曲率半径が変化し、その焦点位置Fが変化する。また、光学手段14がレンズの場合は、図5のように可動部13の変形によりレンズ14が変形してレンズ14の曲率半径が変化し、その焦点位置Fが変化する。
【0026】
かかる構成によれば、光走査部3の光学手段14の焦点距離を可変制御できるので、レンズ等の光学部品を介在させることなく、光走査部3を介して照射される光ビームの焦点位置を所定位置に合わせることができる。従って、光学機器の部品点数を削減でき、構成を簡素化できる。また、本実施形態のような駆動コイルと静磁界発生手段により電磁力を利用して可動部13を駆動する電磁駆動タイプの光走査部3の場合は、駆動コイル15をヒータコイルとして兼用できる利点がある。
【0027】
次に、本発明の第2実施形態を説明する。
図6に第2実施形態の構成図を示す。尚、第1実施形態と同一要素には同一符号を付して説明を省略する。
第2実施形態は、光学手段14の焦点距離をフィードバック制御する構成であり、第1実施形態の構成に、光学手段14の実際の焦点距離を検出する焦点距離検出手段7を付加して構成される。
【0028】
光学手段14の焦点距離は、可動部13の変形量で決まる。従って、可動部13を加熱して変形させる構成では光学手段14の焦点距離は可動部13の温度に関連するので、前記焦点距離検出手段7として例えば温度センサを用い、可動部13の温度を検出することにより光学手段14の焦点距離を検出することができる。本実施形態では、温度センサを可動部13に取付けて実際の焦点距離を検出するものとする。この場合、本実施形態では、例えば温度センサの検出温度を焦点距離に換算するため、可動部温度と焦点距離との対応関係を予め実験等で求め、可動部温度と焦点距離との対応データを、例えばデータ記憶部6に記憶させておき、温度センサからの検出値に基づいてデータ記憶部6から焦点距離値を読み出すようにする。
【0029】
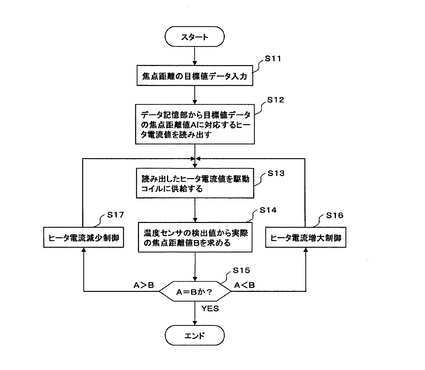
次に、図7のフローチャートを参照して第2実施形態の焦点距離制御動作を説明する。尚、可動部13の振れ角制御は第1実施形態と同様であるので説明を省略する。
ステップ11〜13の動作は図3のステップ1〜3と同様である。
ステップ14では、温度センサ(焦点距離検出手段7)の検出値を入力し、入力した検出値に対応する焦点距離値Bをデータ記憶部6から読み出す。
【0030】
ステップ15では、目標とする焦点距離値Aとステップ14で求めた実際の焦点距離値Bを比較する。そして、A=Bであればそのときのヒータ電流値を維持する。A<Bであればステップ16に進み、可動部13の変形量を大きくして焦点距離を短くすべくヒータ電流を増大制御する。例えば、現在のヒータ電流値から予め設定した所定値づつヒータ電流をA=Bとなるまで増大補正する。一方、A>Bであればステップ17に進み、可動部13の変形量を小さくして焦点距離を長くすべくヒータ電流を減少制御する。例えば、現在のヒータ電流値から予め設定した所定値づつヒータ電流をA=Bとなるまで減少補正する。
【0031】
かかる第2実施形態の構成によれば、実際の焦点距離を検出して目標の焦点距離値となるようヒータ電流をフィードバック制御するので、焦点距離の制御精度を向上できる。
【0032】
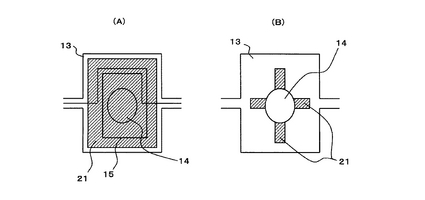
尚、光走査部3の構成は、上述した実施形態に限定されない。例えば、図8(A)に示すように、可動部13表面に矩形状の形状記憶合金21を設け、形状記憶合金21上にヒータコイル兼用の駆動コイル15を設ける構成でもよい。また、図8(B)に示すように十字状に形状記憶合金21を設け、可動部13の加熱源としてヒータコイルに代えてレーザ光を形状記憶合金21部分に照射して可動部13を加熱変形させるよう構成してもよい。このように、形状記憶合意金21を加熱して可動部13を変形させる構成とすれば、形状記憶合金21の変形が可動部13の変形を助長するので、可動部13を変形し易くなる利点がある。
【0033】
可動部13の加熱は、ヒータコイルに限定されず、上述したレーザ光を利用してもよい。この場合、走査用の光ビームと加熱用レーザ光が干渉しないよう、加熱用レーザ光を可動部13の裏面側から可動部13に照射するとよく、可動部13がシリコンの場合は加熱用レーザ光の波長としてシリコンを透過しない波長を選択する。光学手段14がレンズの場合は加熱用レーザ光がレンズを透過しないように斜め方向から可動部13に照射するとよい。
【0034】
また、可動部13を変形させる方法としては、熱の他、圧電体を可動部13に設け、圧電体に印加する電圧を可変制御することにより、可動部13の変形量を制御する構成でもよい。この場合、焦点距離制御用の変形制御量データは印加電圧値となる。
尚、圧電体で可動部13を変形させる構成の場合、上述した第2実施形態の焦点距離検出手段7として温度センサは使用できないので、例えば可動部13の歪みを感知する圧電センサを可動部13に設け、圧電センサの出力を焦点距離検出値として利用する構成とするとよい。
【0035】
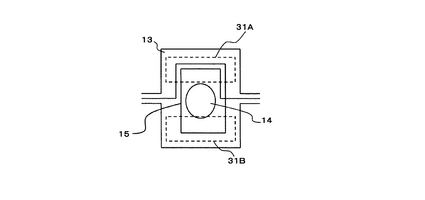
また、光走査部3の可動部13の駆動方式は、上記実施形態で示した電磁駆動タイプに限らず、静電引力を利用した静電タイプ、圧電素子を利用した圧電タイプ等、どのような駆動タイプでもよい。また、図9に示すように、例えば可動部13に駆動コイル15を設けた電磁駆動タイプにおいて、可動部13の裏面側に一対の可動電極31A,31B(図中破線で示す)を設け、この可動電極31A,31Bに対向して可動部13下方の固定部に固定電極(図示せず)を配置して、電磁駆動と静電駆動を併用する構成としてもよい。
【図面の簡単な説明】
【0036】
【図1】本発明に係る可変焦点型光学装置の第1実施形態を示す構成図
【図2】光走査部の変面図
【図3】第1実施形態の加熱制御動作を示すフローチャート
【図4】反射ミラーの場合の焦点距離変化状態の説明図
【図5】レンズの場合の焦点距離変化状態の説明図
【図6】本発明の第2実施形態を示す構成図
【図7】第1実施形態の加熱制御動作を示すフローチャート
【図8】光走査部の別の構成例を示す要部平面図
【図9】光走査部の可動部の別の駆動形態例を示す要部平面図
【符号の説明】
【0037】
1 発光部
2 発光制御部
3 光走査部
4 入力部
5 駆動制御部
6 データ記憶部
7 焦点距離検出手段
11 固定部
12,12 トーションバー
13 可動部
14 光学手段
15 駆動コイル(ヒータコイル)
17A,17B 静磁界発生手段
【技術分野】
【0001】
本発明は、固定部に梁部を介して可動可能に支持された可動部に固定した光学手段の焦点距離を可変できる可変焦点型光学装置に関する。
【背景技術】
【0002】
従来、固定部に梁部を介して可動可能に支持された可動部に光学手段を設け、可動部を介して光学手段を可動させることにより、例えば光走査するような光学装置として、例えば半導体製造技術を利用して製造するプレーナ型光学装置があり、光学手段として反射ミラーを用いる光反射型と光学手段としてレンズを用いる光透過型がある。
【0003】
光反射型の一例としては、例えば、固定部に、梁部を介して回動可能に可動部を軸支し、可動部に設けた駆動コイルと、この駆動コイルに静磁界を作用する静磁界発生手段とで可動部の駆動手段を構成し、通電により駆動コイルに発生する磁界と静磁界との相互作用により発生するローレンツ力を利用して可動部を梁部を中心として回動することにより、反射ミラーを回動させ光ビームを偏向するものがある(例えば、特許文献1参照)。
【0004】
また、光透過型の一例としては、例えば、可動部をH状の梁部で支持し、梁部を可動電極とし、梁部の回りに固定電極を配置し、梁部(可動電極)と固定電極との間に静電引力を発生させ、可動部を介してレンズを変位させることにより、レンズの屈折作用を利用してレンズを透過する光ビームを偏向するものがある(例えば、非特許文献1参照)。
【特許文献1】特許第2722314号公報
【非特許文献1】猿田訓彦,藤田博之, 年吉 洋 「SOI基板によるマイクロレンズ光スキャナの製作」電気学会E部門論文誌,2003年7月,第123巻7号, pp. 231-236
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、光スキャナや光ディスク装置等の光学機器においては、光学手段で反射又は屈折された光ビームの焦点位置を光軸方向に調整して所定の位置に合わせる必要がある。しかし、従来のこの種の光学装置には、反射ミラーやレンズの焦点距離(曲率半径)を可変できるものはなかった。このため、この種の光学装置を光スキャナや光ディスク装置等の光学機器に実装する場合、従来では、光ビームの焦点位置が適切な位置となるよう、光ビームの光路にコリメータレンズ、集光レンズ、或いは、f−θレンズ等の光学部品を設ける必要があった。
【0006】
本発明は前記問題点に着目してなされたもので、光学手段からの光ビームの焦点位置を光学部品を設けることなく調整可能とした可変焦点型光学装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
このため、請求項1の発明の可変焦点型光学装置は、固定部に梁部を介して可動可能に支持された可動部と、該可動部を駆動する駆動手段と、前記可動部に固定され入射する光ビームを屈折又は反射する光学手段と、該光学手段の焦点距離を可変制御する制御手段とを備えて構成した。
かかる構成では、駆動手段で可動部を固定部に対して可動して光学手段を駆動しつつ、制御手段により光学手段の焦点距離を可変できるようになる。
【0008】
制御手段は、請求項2のように、前記光学手段の変形量を制御して前記光学手段の曲率半径を可変制御する構成とするとよい。
具体的には、請求項3のように、前記制御手段は、前記可動部を加熱制御して当該可動部と共に変形する前記光学手段の変形量を制御する構成とする。この場合、請求項4のように、可動部にヒータを設けて可動部を加熱制御する構成としてもよく、請求項6のように、可動部にレーザ光を照射して可動部を加熱制御する構成としてもよい。
【0009】
請求項4の構成においては、請求項5のように、前記駆動手段が、前記可動部に敷設されて通電により磁界を発生する駆動コイルと、前記梁部の軸方向と平行な可動部対辺部に位置する駆動コイル部分に対して静磁界を作用する静磁界発生手段とを備え、前記可動部対辺部に位置する駆動コイル部分に発生する磁界と前記静磁界との相互作用により前記可動部対辺部に電磁力を作用させる構成であるとき、前記駆動コイルが前記ヒータを兼ねる構成とするとよい。
【0010】
請求項7の発明では、前記可動部に形状記憶金属を設け、該形状記憶金属を加熱する構成とした。
また、制御手段は、請求項8のように、圧電体により前記光学手段の変形量を制御する構成とするとよい。
【0011】
請求項9の発明では、前記制御手段は、前記焦点距離の目標値を入力する入力部と、前記光学手段の各焦点距離に対応する光学手段の変形制御量データを予め記憶する記憶部と、該記憶部の記憶データに基づいて入力された前記目標値に対応する変形制御量を決定して光学手段を変形制御する制御部とを備える構成とした。
【0012】
この場合、請求項10のように、前記光学手段の実際の焦点距離を検出する検出手段を設け、前記制御部は、前記検出手段の検出値と前記目標値とを比較して前記検出値が前記目標値と一致するように前記変形制御量をフィードバック制御する構成とするとよい。
【発明の効果】
【0013】
以上説明したように本発明の可変焦点型光学装置によれば、光学手段の曲率半径を可変制御して焦点距離を可変できるよう構成したので、例えば光学機器に実装した場合に光ビームの焦点位置が所定位置となるよう光学装置自体で調整でき、焦点位置調整用レンズ等を別途設ける必要がなくなる。従って、光学機器の部品点数の削減や構成の簡素化を図ることができると共に、設計の自由度を高めることができる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図面に基づいて説明する。
図1に、本発明に係る可変焦点型光学装置の第1実施形態の構成図を示し、図2に第1実施形態の要部である光走査部の平面図を示す。
図1において、本実施形態の可変焦点型光学装置は、発光部1と、発光制御部2と、光走査部3と、入力部4と、駆動制御部5と、データ記憶部6と、を備えて構成される。
【0015】
前記発光部1は、光走査部3に光ビームを発射するもので、例えばレーザ光を発光するレーザ光源等、光を発光できるものであればどのような光源でもよい。
前記発光制御部2は、発光部1を駆動制御するもので、後述する光走査部3の走査角度に合わせて発光部1の発光タイミングを制御する。具体的には、例えば、発光制御部2は、駆動制御部5から送信される後述の可動部駆動電流値と可動部13の走査角度との対応データを格納したメモリを備え、入力した可動部駆動電流値から可動部13の走査角度をメモリから読込み、予め設定した走査角度範囲で発光部1に所定間隔で発光指令を送信する。
【0016】
前記光走査部3は、発光部1から発射された光ビームを走査するもので、例えば半導体マイクロマシン技術を応用して製造されるプレーナ型アクチュエータを用いる。図2に本実施形態の光走査部3の平面図を示し説明する。
【0017】
図2において、本実施形態の光走査部3は、枠状の固定部11に、梁部としての一対のトーションバー12,12を介して可動部13が可動可能に軸支される。これら固定部11、トーションバー12,12及び可動部13は、例えばシリコン基板をエッチングして一体的に形成される。可動部13の表面には、その中央部に光学手段14が設けられ、周縁部に光学手段14を囲むようにして光学手段14の変形量を制御してその曲率半径を可変制御すべく可動部13を加熱するヒータを兼ねる駆動コイル15が設けられる。駆動コイル15は、トーションバー部分を介して固定部11側に引き出されて電極端子16A,16Bに接続して加熱電流及び駆動電流が供給される。尚、駆動コイルとは別に加熱用ヒータコイルを可動部13に設けるようにしてもよい。また、固定部11の外側に、トーションバー12,12の軸方向と平行な可動部対辺部の駆動コイル部分に静磁界を作用する一対の静磁界発生手段17A,17Bが、可動部13を挟んで互いに反対磁極を対向させて配置される。静磁界発生手段17A,17Bは、永久磁石でも電磁石でもよい。
【0018】
ここで、前記光学手段14は、発光部1から発射される光ビームを反射する反射ミラーでもよく、前記光ビームを透過屈折するレンズでもよい。反射ミラーの場合は、アルミニウムや金等を可動部13上に蒸着して形成する。また、レンズの場合は、個別に加工したものを可動部13に貫通孔を形成して取付けるようにしてもよく、可動部13に透明樹脂を滴下して表面張力により可動部13上に形成するようにしてもよい。レンズの材料としては熱や外圧により変形可能な材料、例えば高分子材料やシリコン等を用いる。尚、光学手段14としてレンズを利用した場合は、光ビームの走査側と反対側に発光部1を配置することになるので、通常は可動部13のレンズ取付け部に光ビーム通過用の貫通孔を設ける必要があるが、可動部13が光ビームの透過可能な材質である場合には貫通孔を設ける必要はない。
【0019】
この光走査部3の駆動原理は例えば特許第2722314号等で詳述されており、ここでは簡単に説明する。
可動部13上の駆動コイル15に電流を流すと磁界が発生し、この磁界と静磁界発生手段17A,17Bによる静磁界との相互作用によりローレンツ力が発生し、トーションバー12,12の軸方向と平行な可動部対辺部に互いに逆方向の回転力が発生し、トーションバー12,12のばね力と発生した回転力とが釣合う位置まで可動部13は回動する。駆動コイル15に交流電流を流せば可動部13を介して光学手段14が揺動し、発光部1から照射された光ビームを走査できる。発生する回転力は、駆動コイル15に流す電流値に比例するので、駆動コイル15の電流値を制御することで可動部13の揺動角度(光ビームの走査角度)を制御できる。ここで、駆動コイル15と静磁界発生手段17A,17Bで駆動手段を構成する。
【0020】
前記入力部4は、光学手段14の焦点距離の目標値を入力するものであり、光ビームの照射対象物までの距離が固定値で変化しないような場合は手動で目標値を入力する、例えばキーボード等を用いることができる。また、光ビームの照射対象物までの距離が常時変化するような場合は対象物までの距離検出が可能な測距装置を用いてその検出値を目標値として入力するようにすればよい。
【0021】
前記駆動制御部5は、光走査部3の駆動及び光学手段14の焦点距離を可変制御すべく可動部13を加熱制御するものであり、駆動コイル15に供給する可動部駆動用交流電流を制御すると共に、入力部4から入力される目標値とデータ記憶部6の記憶データとに基づいて前記交流電流に重畳する可動部加熱用の直流電流を供給制御し光学手段14の変形量を制御して曲率半径を可変制御しその焦点距離を目標値に制御する。また、光走査部3は、前述したように可動部13の回転力が駆動コイル15に供給する駆動電流に比例し、前記駆動電流値から可動部13の走査位置(走査角度)が分かるので、駆動制御部5は、前記駆動電流値を発光部1の発光タイミング制御用信号として発光制御部2に送信する。尚、光走査部3の走査角度を、例えば可動部裏面側にミラーを設けてその反射光を受光素子アレイ等で受光しその受光位置から検出するような走査角度検出装置を、駆動制御部5とは別に設け、この走査角度検出装置で走査角度を直接検出しその検出値を発光タイミング制御用信号として発光制御部2に送信するようにしてもよい。この場合、発光制御部2において、前述した可動部駆動電流値と可動部13の走査角度との対応データを格納したメモリは不要である。
【0022】
前記データ記憶部6は、予め実験等で計測した、光学手段14の各焦点距離に対応する光学手段14の変形制御量データを予め記憶する記憶部であり、具体的には、光学手段14の各焦点距離に対応する光学手段14の変形制御量データとして可動部加熱用の前記直流電流値データが、各焦点距離データと対応付けられて記憶されている。
【0023】
次に、本実施形態の可変焦点型光学装置の動作を説明する。
光走査部3の可動部13の振れ角制御は、従来と同様であり、駆動制御部5から駆動コイル15に交流電流を供給制御して可動部13を共振駆動する。発光制御部2は、駆動制御部5から送信される前記交流電流値に基づいてメモリから可動部13の走査角度を読取り、予め設定された走査角度範囲で発光部1に発光指令を間欠的に出力する。発光部1は、前記発光指令の入力毎に光ビームを発光する。これにより、光走査部3の可動部13の揺動動作により光ビームが所定の走査範囲で走査される。
【0024】
次に、図3のフローチャートを参照して本発明の特徴である光学手段14の焦点距離制御動作を説明する。
ステップ1(図中S1で示し、以下同様とする)では、入力部4で焦点距離の目標値データを入力する。例えば、可動部13の走査角度とその時の焦点距離値を目標値データとして入力する。
ステップ2では、ステップ1で入力された目標値データの各焦点距離値に対応するヒータ電流値(直流電流値)を、駆動制御部5はデータ記憶部6から読み出し、各走査角度と対応付けて記憶する。
ステップ3では、駆動制御部5は、予め記憶してある駆動電流値と走査角度の対応データに基づいて駆動電流値から走査角度を読み出し、当該読み出した走査角度に対応する直流電流値を、ステップ2で読み出し記憶したヒータ電流値と走査角度との対応データから読み出し、当該読み出した直流電流値を可動部駆動用の交流電流に重畳して駆動コイル15に供給して可動部13を加熱制御する。駆動コイルとヒータコイルが別々の場合は、それぞれのコイルに駆動電流と加熱電流を供給すればよいことは言うまでもない。
【0025】
これにより、可動部13が供給されるヒータ電流量に応じて変形する。例えば、光学手段14が反射ミラーの場合は、図4のように可動部13が変形してその反り量が変化し反射ミラー14の曲率半径が変化し、その焦点位置Fが変化する。また、光学手段14がレンズの場合は、図5のように可動部13の変形によりレンズ14が変形してレンズ14の曲率半径が変化し、その焦点位置Fが変化する。
【0026】
かかる構成によれば、光走査部3の光学手段14の焦点距離を可変制御できるので、レンズ等の光学部品を介在させることなく、光走査部3を介して照射される光ビームの焦点位置を所定位置に合わせることができる。従って、光学機器の部品点数を削減でき、構成を簡素化できる。また、本実施形態のような駆動コイルと静磁界発生手段により電磁力を利用して可動部13を駆動する電磁駆動タイプの光走査部3の場合は、駆動コイル15をヒータコイルとして兼用できる利点がある。
【0027】
次に、本発明の第2実施形態を説明する。
図6に第2実施形態の構成図を示す。尚、第1実施形態と同一要素には同一符号を付して説明を省略する。
第2実施形態は、光学手段14の焦点距離をフィードバック制御する構成であり、第1実施形態の構成に、光学手段14の実際の焦点距離を検出する焦点距離検出手段7を付加して構成される。
【0028】
光学手段14の焦点距離は、可動部13の変形量で決まる。従って、可動部13を加熱して変形させる構成では光学手段14の焦点距離は可動部13の温度に関連するので、前記焦点距離検出手段7として例えば温度センサを用い、可動部13の温度を検出することにより光学手段14の焦点距離を検出することができる。本実施形態では、温度センサを可動部13に取付けて実際の焦点距離を検出するものとする。この場合、本実施形態では、例えば温度センサの検出温度を焦点距離に換算するため、可動部温度と焦点距離との対応関係を予め実験等で求め、可動部温度と焦点距離との対応データを、例えばデータ記憶部6に記憶させておき、温度センサからの検出値に基づいてデータ記憶部6から焦点距離値を読み出すようにする。
【0029】
次に、図7のフローチャートを参照して第2実施形態の焦点距離制御動作を説明する。尚、可動部13の振れ角制御は第1実施形態と同様であるので説明を省略する。
ステップ11〜13の動作は図3のステップ1〜3と同様である。
ステップ14では、温度センサ(焦点距離検出手段7)の検出値を入力し、入力した検出値に対応する焦点距離値Bをデータ記憶部6から読み出す。
【0030】
ステップ15では、目標とする焦点距離値Aとステップ14で求めた実際の焦点距離値Bを比較する。そして、A=Bであればそのときのヒータ電流値を維持する。A<Bであればステップ16に進み、可動部13の変形量を大きくして焦点距離を短くすべくヒータ電流を増大制御する。例えば、現在のヒータ電流値から予め設定した所定値づつヒータ電流をA=Bとなるまで増大補正する。一方、A>Bであればステップ17に進み、可動部13の変形量を小さくして焦点距離を長くすべくヒータ電流を減少制御する。例えば、現在のヒータ電流値から予め設定した所定値づつヒータ電流をA=Bとなるまで減少補正する。
【0031】
かかる第2実施形態の構成によれば、実際の焦点距離を検出して目標の焦点距離値となるようヒータ電流をフィードバック制御するので、焦点距離の制御精度を向上できる。
【0032】
尚、光走査部3の構成は、上述した実施形態に限定されない。例えば、図8(A)に示すように、可動部13表面に矩形状の形状記憶合金21を設け、形状記憶合金21上にヒータコイル兼用の駆動コイル15を設ける構成でもよい。また、図8(B)に示すように十字状に形状記憶合金21を設け、可動部13の加熱源としてヒータコイルに代えてレーザ光を形状記憶合金21部分に照射して可動部13を加熱変形させるよう構成してもよい。このように、形状記憶合意金21を加熱して可動部13を変形させる構成とすれば、形状記憶合金21の変形が可動部13の変形を助長するので、可動部13を変形し易くなる利点がある。
【0033】
可動部13の加熱は、ヒータコイルに限定されず、上述したレーザ光を利用してもよい。この場合、走査用の光ビームと加熱用レーザ光が干渉しないよう、加熱用レーザ光を可動部13の裏面側から可動部13に照射するとよく、可動部13がシリコンの場合は加熱用レーザ光の波長としてシリコンを透過しない波長を選択する。光学手段14がレンズの場合は加熱用レーザ光がレンズを透過しないように斜め方向から可動部13に照射するとよい。
【0034】
また、可動部13を変形させる方法としては、熱の他、圧電体を可動部13に設け、圧電体に印加する電圧を可変制御することにより、可動部13の変形量を制御する構成でもよい。この場合、焦点距離制御用の変形制御量データは印加電圧値となる。
尚、圧電体で可動部13を変形させる構成の場合、上述した第2実施形態の焦点距離検出手段7として温度センサは使用できないので、例えば可動部13の歪みを感知する圧電センサを可動部13に設け、圧電センサの出力を焦点距離検出値として利用する構成とするとよい。
【0035】
また、光走査部3の可動部13の駆動方式は、上記実施形態で示した電磁駆動タイプに限らず、静電引力を利用した静電タイプ、圧電素子を利用した圧電タイプ等、どのような駆動タイプでもよい。また、図9に示すように、例えば可動部13に駆動コイル15を設けた電磁駆動タイプにおいて、可動部13の裏面側に一対の可動電極31A,31B(図中破線で示す)を設け、この可動電極31A,31Bに対向して可動部13下方の固定部に固定電極(図示せず)を配置して、電磁駆動と静電駆動を併用する構成としてもよい。
【図面の簡単な説明】
【0036】
【図1】本発明に係る可変焦点型光学装置の第1実施形態を示す構成図
【図2】光走査部の変面図
【図3】第1実施形態の加熱制御動作を示すフローチャート
【図4】反射ミラーの場合の焦点距離変化状態の説明図
【図5】レンズの場合の焦点距離変化状態の説明図
【図6】本発明の第2実施形態を示す構成図
【図7】第1実施形態の加熱制御動作を示すフローチャート
【図8】光走査部の別の構成例を示す要部平面図
【図9】光走査部の可動部の別の駆動形態例を示す要部平面図
【符号の説明】
【0037】
1 発光部
2 発光制御部
3 光走査部
4 入力部
5 駆動制御部
6 データ記憶部
7 焦点距離検出手段
11 固定部
12,12 トーションバー
13 可動部
14 光学手段
15 駆動コイル(ヒータコイル)
17A,17B 静磁界発生手段
【特許請求の範囲】
【請求項1】
固定部に梁部を介して可動可能に支持された可動部と、該可動部を駆動する駆動手段と、
前記可動部に固定され入射する光ビームを屈折又は反射する光学手段と、該光学手段の焦点距離を可変制御する制御手段とを備えて構成したことを特徴とする可変焦点型光学装置。
【請求項2】
前記制御手段は、前記光学手段の変形量を制御して前記光学手段の曲率半径を可変制御する構成である請求項1に記載の可変焦点型光学装置。
【請求項3】
前記制御手段は、前記可動部を加熱制御して当該可動部と共に変形する前記光学手段の変形量を制御する構成である請求項2に記載の可変焦点型光学装置。
【請求項4】
前記制御手段は、可動部にヒータを設けて可動部を加熱制御する構成である請求項3に記載の可変焦点型光学装置。
【請求項5】
前記駆動手段が、前記可動部に敷設されて通電により磁界を発生する駆動コイルと、前記梁部の軸方向と平行な可動部対辺部に位置する駆動コイル部分に対して静磁界を作用する静磁界発生手段とを備え、前記可動部対辺部に位置する駆動コイル部分に発生する磁界と前記静磁界との相互作用により前記可動部対辺部に電磁力を作用させる構成であるとき、前記駆動コイルが前記ヒータを兼ねる構成とした請求項4に記載の可変焦点型光学装置。
【請求項6】
前記制御手段は、可動部にレーザ光を照射して可動部を加熱制御する構成である請求項3に記載の可変焦点型光学装置。
【請求項7】
前記可動部に形状記憶金属を設け、該形状記憶金属を加熱する構成である請求項3〜6のいずれか1つに記載の可変焦点型光学装置。
【請求項8】
前記制御手段は、圧電体により前記光学手段の変形量を制御する構成である請求項2に記載の可変焦点型光学装置。
【請求項9】
前記制御手段は、前記焦点距離の目標値を入力する入力部と、前記光学手段の各焦点距離に対応する光学手段の変形制御量データを予め記憶する記憶部と、該記憶部の記憶データに基づいて入力された前記目標値に対応する変形制御量を決定して光学手段を変形制御する制御部とを備える構成である請求項1〜8のいずれか1つに記載の可変焦点型光学装置。
【請求項10】
前記光学手段の実際の焦点距離を検出する検出手段を設け、前記制御部は、前記検出手段の検出値と前記目標値とを比較して前記検出値が前記目標値と一致するように前記変形制御量をフィードバック制御する構成である請求項9に記載の可変焦点型光学装置。
【請求項1】
固定部に梁部を介して可動可能に支持された可動部と、該可動部を駆動する駆動手段と、
前記可動部に固定され入射する光ビームを屈折又は反射する光学手段と、該光学手段の焦点距離を可変制御する制御手段とを備えて構成したことを特徴とする可変焦点型光学装置。
【請求項2】
前記制御手段は、前記光学手段の変形量を制御して前記光学手段の曲率半径を可変制御する構成である請求項1に記載の可変焦点型光学装置。
【請求項3】
前記制御手段は、前記可動部を加熱制御して当該可動部と共に変形する前記光学手段の変形量を制御する構成である請求項2に記載の可変焦点型光学装置。
【請求項4】
前記制御手段は、可動部にヒータを設けて可動部を加熱制御する構成である請求項3に記載の可変焦点型光学装置。
【請求項5】
前記駆動手段が、前記可動部に敷設されて通電により磁界を発生する駆動コイルと、前記梁部の軸方向と平行な可動部対辺部に位置する駆動コイル部分に対して静磁界を作用する静磁界発生手段とを備え、前記可動部対辺部に位置する駆動コイル部分に発生する磁界と前記静磁界との相互作用により前記可動部対辺部に電磁力を作用させる構成であるとき、前記駆動コイルが前記ヒータを兼ねる構成とした請求項4に記載の可変焦点型光学装置。
【請求項6】
前記制御手段は、可動部にレーザ光を照射して可動部を加熱制御する構成である請求項3に記載の可変焦点型光学装置。
【請求項7】
前記可動部に形状記憶金属を設け、該形状記憶金属を加熱する構成である請求項3〜6のいずれか1つに記載の可変焦点型光学装置。
【請求項8】
前記制御手段は、圧電体により前記光学手段の変形量を制御する構成である請求項2に記載の可変焦点型光学装置。
【請求項9】
前記制御手段は、前記焦点距離の目標値を入力する入力部と、前記光学手段の各焦点距離に対応する光学手段の変形制御量データを予め記憶する記憶部と、該記憶部の記憶データに基づいて入力された前記目標値に対応する変形制御量を決定して光学手段を変形制御する制御部とを備える構成である請求項1〜8のいずれか1つに記載の可変焦点型光学装置。
【請求項10】
前記光学手段の実際の焦点距離を検出する検出手段を設け、前記制御部は、前記検出手段の検出値と前記目標値とを比較して前記検出値が前記目標値と一致するように前記変形制御量をフィードバック制御する構成である請求項9に記載の可変焦点型光学装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2006−84495(P2006−84495A)
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願番号】特願2004−266267(P2004−266267)
【出願日】平成16年9月14日(2004.9.14)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
【公開日】平成18年3月30日(2006.3.30)
【国際特許分類】
【出願日】平成16年9月14日(2004.9.14)
【出願人】(000004651)日本信号株式会社 (720)
【Fターム(参考)】
[ Back to top ]