
可変直径イントロデューサシースを有する送給装置
【課題】調節可能な直径と直径を変えるメカニズムを有するイントロデューサシースを有する送給装置を提供する。
【解決手段】イントロデューサシース10は、所望の直径に拡張・収縮可能な管状構造体を有する。第1形態では、当該管状構造体は、第1直径と軸方向の第1長さを有する。第2形態では、当該管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。作動装置には、内側部材と外側部材が含まれる。両部材と管状構造体の間の第1方向又は第2方向の相対的な動きに応じて、管状構造体は、第1形態あるいは第2形態の間のそれぞれに動くことができる。当該管状構造体は網状構造であることができる。当該内側及び外側部材は、反転した管状スリーブを形成する。外側スリーブの近位端は、内側スリーブの近位端に対して移動可能である。ロッキングシステムによって、イントロデューサシース10を所望の直径に固定することができる。
【解決手段】イントロデューサシース10は、所望の直径に拡張・収縮可能な管状構造体を有する。第1形態では、当該管状構造体は、第1直径と軸方向の第1長さを有する。第2形態では、当該管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。作動装置には、内側部材と外側部材が含まれる。両部材と管状構造体の間の第1方向又は第2方向の相対的な動きに応じて、管状構造体は、第1形態あるいは第2形態の間のそれぞれに動くことができる。当該管状構造体は網状構造であることができる。当該内側及び外側部材は、反転した管状スリーブを形成する。外側スリーブの近位端は、内側スリーブの近位端に対して移動可能である。ロッキングシステムによって、イントロデューサシース10を所望の直径に固定することができる。
【発明の詳細な説明】
【技術分野】
【0001】
(優先権の主張)
本出願は、2011年8月2日に出願された米国仮特許出願第61/514,241号の優先権を主張する通常特許出願であり、その内容を完全な形で本明細書に引用して援用する。
【0002】
本開示は、例えば、体腔内に人工器官を留置したり、体腔に介入装置を導くためのイントロデューサシースを含む、送給装置に関する。また、本開示は、調節可能な直径とイントロデューサシースの直径を変えるメカニズムを有するイントロデューサシースを有する送給装置に関する。
【背景技術】
【0003】
数多くの処置が開発されており、血管や体管等の患者の体腔への医療装置の経皮的挿入が含まれる。当該装置は、公知の多様な技術によって体腔に導入される。例えば、セルディンガー技法を用いて、ガイドワイヤを血管に導入する。本技術には、針で血管に外科的開口部を作り、針穴を通じて血管にガイドワイヤを挿入することが含まれる。針は、引き抜くことができ、所定の位置にガイドワイヤを置いておく。そして、送給装置は、ガイドワイヤ上を血管へと挿入される。送給装置は、従来の方法で使用され、カテーテル、心臓部誘導、バルーン、ステント、ステントグラフト等の多様な医療装置を血管内に挿入する。
【0004】
例えば、送給装置は、損傷部位に、ステントグラフト等の拡張型人工器官を送給して留置し、損傷したり病気になったりした胆管や血管等の体腔を治療するのに用いられる。ステントグラフトは、通常、生体適合性グラフト材料の管状体から形成し、一つ以上のステントが、管状体に搭載されその支持を提供する。ステントは、バルーン拡張型ステント、及び/又は、自己拡張型ステントである。イントロデューサ送給・留置装置の使用による遠隔地から患者の体腔への人工器官の留置は、発明の名称が「人工器官と人工器官の留置方法と手段」という米国特許第7,435,253号(Hartley)に記載されており、その内容を完全な形で本明細書に引用して援用する。
【0005】
送給装置は、損傷部位に送給時に、送給形態に人工器官を留めるように構成されている。カテーテルは、典型的には、外側シースから間隔を置いた内側カニューレを含み、人工器官を収納する人工器官保持領域を形成する。人工器官は、人工器官保持領域に沿って内側カニューレに搭載され、外側シースは、人工器官を送給形態に保持する。送給装置が損傷部位に送給された後、例えば、内側カニューレに対して人工器官から離れるように外側シースを引き戻し、人工器官の拡張を許容して、当該人工器官は留置する。適切なサイズの人工器官の正確な配置は、治療のため、標的損傷部位を十分覆うものでなければならず、人工器官の端は、体腔の健全な組織と係合していなければならない。
【0006】
適切なサイズの人工器官をできるだけ小さい送給装置に搭載するのが望ましい。人工器官のサイズが送給装置のサイズ選択の一要因である上、体腔の形状及びサイズも重要となりうる。そのため、体腔よりも相対的に小さい送給装置を導入することによって、体腔や人体の他の部分に悪影響を及ぼすような、体腔内の流体や血流の潜在的滞おりを避けることができる。さらに、体腔は曲がりくねっていることもあり得るので、比較的小さな送給装置が曲がりくねった部分を通るのを容易にするのである。
【0007】
しかし、相対的に小さな送給装置にも問題がある。例えば、人工器官を搭載したり、及び/又は、留置する際に、人工器官と外側シースの間に大きなせん断力が生じうる。搭載、及び/又は留置時に人工器官に対して外側シースを動かそうとすると、大きなせん断力は、より大きな押力や引き抜き力を要することになる。大きなせん断力の第1要因は、外側シースと内側シースの間の環状空間内に、人工器官を搭載しすぎることによる。例えば、人工器官が環状空間の70%を超えて占有するとき、実質的に過剰搭載となり得る。そのため、できるだけ小さな外側シースとともにできるだけ大きな人工器官を留置したい時は、当該人工器官が環状空間を過剰充填することになり得る。当該過剰充填は、人工器官と外側シースの間のより大きな表面接触を生じ、人工器官から半径方向内側への動きをより少なくする。さらに、外側シースとの摩擦は、人工器官の円柱強度よりも大きくなり、長手方向の人工器官の変形を許容し、それによって、人工器官をアコーデオンのように崩壊させる。更に、ステント及び/又は刺等の人工器官の剛性部分は、外側シースの内面をこする。こすることによって、破片を形成し、そのため、体内に潜在的な塞栓を導入するリスクが増す。また、こすることで、保持力を危うくし、外側シースを弱める得る。それによって、外側シースは、不必要に、より大きな送給側面に膨らんでしまうこともあり得る。
【0008】
このため、送給装置内の人工器官の搭載および/又は留置を容易にし、特に、人工器官とイントロデューサシースの間に起こるせん断力を減らす必要性がある。更に、例えばせん断力の減少のための拡張構造と、例えばできるだけ小さい送給側面のための収縮構造との間を、人工器官の搭載及び留置の間と留置以後とにおいて、何回も半径方向に動くことのできるイントロデューサシースの必要性がある。
【発明の概要】
【0009】
本開示は、改良されたイントロデューサと、人工器官の搭載と体腔内の人工器官の留置のための方法を提供することを求めている。第1態様では、送給装置には、貫通するルーメンを形成する壁を有する管状構造体を含むイントロデューサシースが含まれる。管状構造体は、第1形態と第2形態の間を動くことができる。第1形態では、管状構造体は、第1直径と軸方向の第1長さを有し、第2形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。作動装置は、第1形態と第2形態の間に管状構造体を動かすことができる。作動装置は、互いに連結された内側部材と外側部材を含み、管状構造体を囲むことができる。内側部材は、管状構造体の内壁に沿って配置される。外側部材は、管状構造体の外壁に沿って配置される。当該両部材と管状構造体の間の第1方向の相対的な動きに応じて、作動装置は、管状構造体を第1形態へと動かし、第2方向では、作動装置は、管状構造体を第2形態へと動かす。
【0010】
別の形態によると、サブアセンブリを形成するために、キャリアとキャリアの領域に搭載される人工器官を有する送給装置が提供されている。当該装置には、通路を有し、摺動自在にサブアセンブリを収納する外側シースが含まれる。外側シースは、第1ポジションから第2ポジションの間を動くことができる操作可能部材を含むことができる。外側シースの壁は、操作可能部材と連結される近位端を有する調節可能な管状構造体と、管状構造体の内壁と外壁のそれぞれに沿って配置される内側部材と外側部材を含めることができる。対応する内側部材と外側部材の近位端は、操作可能部材に連結している。外側部材の遠位端は、内側部材の遠位端に連結され、反転可能な部材を形成する。第1ポジションと第2ポジションの間の操作可能部材の動きに応じて、内側部材の近位端と外側部材の近位端は、相対的に動き、選択的に管状構造体の直径を変化させる。
【0011】
更に別の態様では、人工器官を搭載、及び/又は、留置等のためのイントロデューサシースの直径を変化させる方法が提供されている。当該方法には、以下の1つ以上のステップが含まれる。ハブアセンブリに連結するシース本体が提供される。シース本体は、互いに連結し調節可能な管状構造体を囲み反転可能な部材を形成する、内側部材と外側部材を含むことができる。管状構造体は、第1形態と第2形態の間を動くことができる。第1形態では、管状構造体は、第1直径と軸方向の第1長さを有し、第2形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。内側部材と外側部材は、管状構造体に対して動き、管状構造体は、第1形態と第2形態の間を動くことができ、管状構造体の直径を変化させる。
【図面の簡単な説明】
【0012】
以下添付図面を参照しながら、本開示の実施形態を、例示として説明する。
【0013】
【図1】送給装置の一具体例の斜視図である。
【0014】
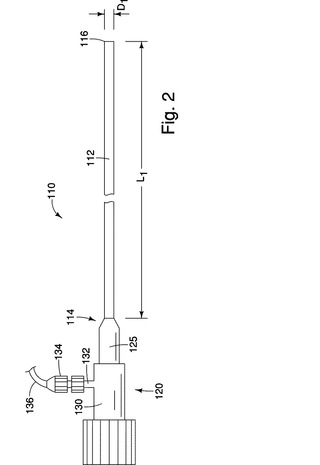
【図2】収縮形態のイントロデューサシースの一例の側面図である。
【0015】
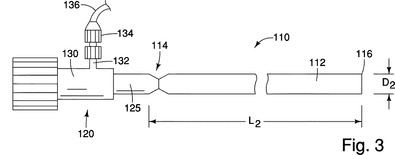
【図3】拡張形態のイントロデューサシースの一例の側面図である。
【0016】
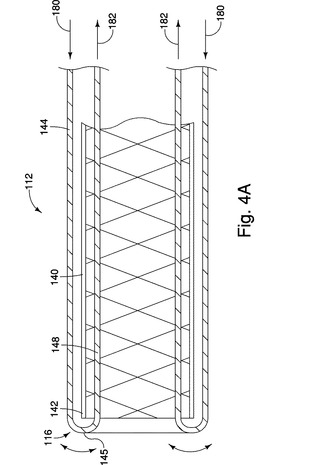
【図4A】イントロデューサシースが提供されるシース本体の断面図である。
【0017】
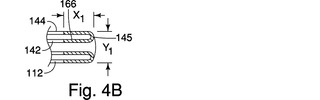
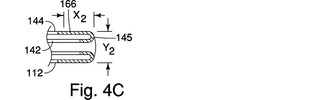
【図4B】放射線不透過性部材を有するシース本体の一具体例を描いている。
【図4C】図4Bと共に、放射線不透過性部材を有するシース本体の一具体例を描いている。
【0018】
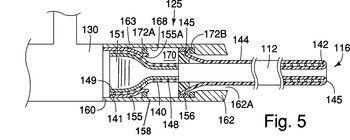
【図5】シース操縦装置とイントロデューサシースが提供されたシース本体の一部断面図である。
【0019】
【図6】シース操縦装置とイントロデューサシースとともに提供されたロッキングシステムの斜視図である。
【0020】
【図7】人工器官を搭載している時、イントロデューサシースの直径を変化させる方法を示している。
【0021】
【図8A】体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【図8B】図8Aと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
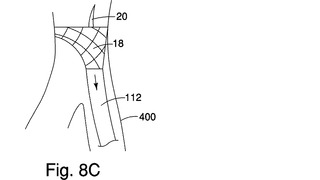
【図8C】図8A及び図8Bと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
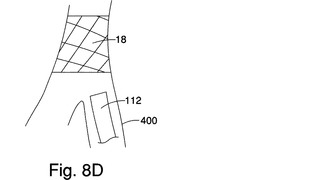
【図8D】図8A乃至図8Cと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【発明を実施するための形態】
【0022】
本発明の理解のために、図面に示される実施形態を参照し、また同実施形態の説明のために具体的な用語が用いられる。図面は、概略図で、多様な構成要素は実物大では示していないことが理解される。多くの具体例において、図面は、読み手のために、構成要素を拡大して示している。また、図面では、異なる図にわたって、参照番号が対応する構成要素を指定していることに注意されたい。
【0023】
以下の記載では、「近位の」という用語と「遠位の」という用語が使用され、シースの反対の軸端と多様な構成要素の軸端を記述している。「近位の」という用語は、従来の意味で用いられ、装置の使用時に、装置或いはその構成要素の操作者に最も近い端を指している。「遠位の」という用語は、従来の意味で用いられ、患者に最初に挿入した或いは、使用時に患者に最も近い装置或いはその構成要素の端を指している。
【0024】
「介入装置」という用語は、実際に支持、修復或いは置換するか、そのように構成されているか、体の部分あるいは体の部分の機能を支持、修復或いは置換するために、それだけで、或いは、他の装置、物体或いは、構造体と組み合わせて用いられる装置、物体或いは構造体を指している。介入装置の具体例として、シース、カテーテル、ガイドワイヤ、心臓部誘導、血管閉塞装置、フィルター、人工器官、ステント、ステントグラフト及び送給・留置装置が含まれるが、それらに限定されない。
【0025】
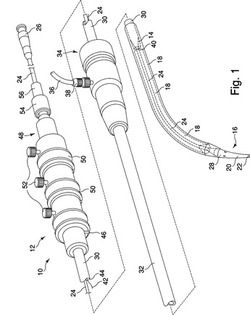
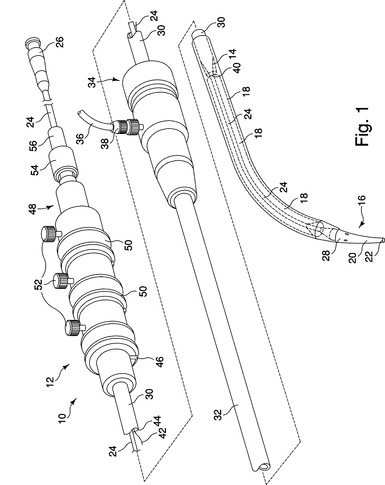
図1は、送給装置10の一つの具体例を示しているが、それには、外部操縦部12、近位連結領域14及び遠位連結領域16が含まれる。近位連結領域14及び遠位連結領域16は、人工器官18の両端を固定することができる。人工器官18を留置する医療処置時に、近位連結領域14と遠位連結領域16は、患者の血管系を進んでいき、この実施例では、所望の留置場所へと進んでいくことができる。イントロデューサ装置10の近位端における外部操縦部12は、外科医に操作されイントロデューサを操縦するが、治療の間、患者の体外にとどまっている。
【0026】
遠位連結領域16は、拡張器の先端20を含むことができ、該拡張器は一般的に、従来のタイプのガイドワイヤ(図示せず)を受け入れるための孔22が設けられている。また、当該長手方向の孔22は、医療試薬の導入のためのチャネルを提供することもできる。例えば、造影剤を提供し、医療処置の配置・留置の段階時に血管造影法を行うことができる。
【0027】
内側カテーテル或いはカニューレ24は、従来は、柔軟性のある細い壁の金属チューブから作られ、拡張器の先端20に固定することができる。内側カテーテル24は、柔軟性があるので、イントロデューサ装置10は、大腿動脈等の比較的曲がりくねった血管に沿って進むことができ、イントロデューサ装置10の遠位端を長手方向に回転させて操縦することができる。内側カテーテル24は、キャリアを形成し、人工器官18あるいは患者に移植されるその他の装置を運ぶことができる。内側カテーテル24は、従来の方法で、イントロデューサ装置10を通って外側操縦部12へと伸び、連結装置26で終わることができる。連結装置26は、内側カテーテル24に試薬を導入することを容易にするため注射器を受けるように設計され、このため、一般的に、ネジ式ルアロック連結が提供される。
【0028】
シースプッシャー或いはロッド30(以下、「プッシャー部材」と称す)は、一般的に、プラスチック素材から作られるが、それが提供されるとき、内側カテーテル24と同心で、その半径方向外側に搭載することができる。プッシャー部材30は、「厚い壁」をしている。即ち、その壁の全外側サイズは、内側カテーテル24よりも数倍大きいのが好ましい。幾つかの具体例では、プッシャー部材30と内側カテーテル24は、同じ構成要素であってもよく、人工器官18が運ばれる場所では、外側直径が異なることもできる。プッシャー部材30と内側カテーテル24は、外側操縦領域12へと近位方向に伸びることもできる。
【0029】
外側シース32は、プッシャー部材30の同軸上でその半径方向外側にある。人工器官18は、ステント、ステントグラフト、その他のイントロデューサ装置10で送給可能な移植片或いは人工器官でもよく、外側シース32で圧縮された状態に保たれる。外側シース32は、外側操縦部12のシース操縦機・止血シールユニット34へと近位方向に伸びる。ユニット34には、止血シール(図示せず)と従来のルアロック38によってユニット34に備え付けられたサイドチューブ36が含まれる。
【0030】
また、シース操縦機・止血シールユニット34には、外側シースを当該ユニット34に固定するクランプカラー(図示せず)が含まれ、シリコンシールリング(図示せず)等のシール部材は、プッシャー部材30の周りに止血シールを形成する。サイドチューブ36は、プッシャー部材30と外側シース32の間の、例えば食塩水等の医療用流体物の導入を容易にすることができる。
【0031】
イントロデューサ装置10の組立時に、外側シース32を遠位連結領域16の拡張器の先端20の近位端上に進入させることができるが、人工器官18は、外力によって圧縮状態で保持される。適切な近位保持部(本図面では見ることができない)は、プッシャー部材に連結し、処置の間、人工器官18の近位端を保持することができる。人工器官18の遠位端には、ループ部材(図示せず)が提供され、遠位抑制ワイヤ42がそこを通って伸びている。また、遠位抑制ワイヤ42は、また、近位連結部にある隙間(図示せず)を通って、内側カテーテル24とプッシャー部材30の間に形成される環状空間44へと伸びる。遠位抑制ワイヤ42は、環状空間44を通って、操作領域12へと伸び、遠位ワイヤ解放メカニズム46において環状空間44を抜け出る。
【0032】
外部操縦部12の近位端には、本体48と次にはプッシャー部材30に搭載される少なくとも一つの抑制ワイヤ作動部50が含まれる。内側カテーテル24は、本体48を通り抜ける。遠位ワイヤ解放メカニズム46と近位ワイヤ解放メカニズム50は、本体48上の摺動可能な動きのために搭載することができる。締めつけネジ52は、移植片18の早期の不注意な解放を防ぐことができる。解放ワイヤが医療処置時に不必要な血液の損失がなく、本体48を貫いて伸びることができるように、止血シール(図示せず)が含まれる。
【0033】
外部操縦部12の近位部には、本体48の近位端に搭載されるピン万力54が含まれる。ピン万力54には、ねじぶた56がある。ねじ込まれると、ピン万力54の万力あご(図示せず)は、内側カテーテル24に対して固定し、或いは係合する。万力あごが係合すると、内側カテーテル24は、ただ、本体48と伴に動き、それゆえ、プッシャー部材30とともに、動くだけである。ねじぶた56が締め付けられていると、アセンブリ全体が一体に動く。
【0034】
イントロデューサ装置10が所望の留置位置にされると、外側シース32が引き抜かれ、近位ワイヤ解放メカニズム50と遠位ワイヤ解放メカニズム46が解放され人工器官18が広がることができる。ある処置のためには、人工器官18が広がった後に、シース32を残される。プッシャー部材30と内側カテーテル24が引き抜かれ、案内役として残されている外側シース32を用いて、さらなる介入装置で置換する。
【0035】
イントロデューサ装置の一構成要素がイントロデューサシースである。所望の直径で拡張形態と収縮形態の間を半径方向に動くことのできる管状構造体を有するイントロデューサシースが本明細書で説明される。例えば、介入装置の搭載時、介入装置の留置時、及び/又は、介入装置を通過させる時、この管状構造体は有用である。収縮形態では、管状構造体は、第1直径と軸方向の第1長さを有する。拡張形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。スリーブ状作動体が、管状構造体を第1形態と第2形態の間で動かすことができる。スリーブ状作動体には、内側スリーブと外側スリーブが含まれ、それらは、反転した管状スリーブを形成する。外側スリーブ・内側スリーブと管状構造体の間の第1方向あるいは第2方向における相対的な動きに応じて、管状構造体は、それぞれ、収縮形態あるいは拡張形態もしくはその間の位置に動くことができる。
【0036】
図2と図3は、第1の収縮形態と第2の拡張形態の間をそれぞれ動くことのできるシース本体112を有する送給装置の外側イントロデューサシース110のある実施例を示している。イントロデューサシース110は、外側シース32の代わりにイントロデューサ装置10に提供され、或いは、イントロデューサ装置とは別に利用することができる。収縮形態では、シース本体112は、第1直径D1と軸方向の第1長さL1を有する。拡張形態では、シース本体112は、より大きな第2直径D2とより短い軸方向の第2長さL2を有する。シース本体112は、近位端114と遠位端116を有する。ハブアセンブリ120は、シース本体112の近位端114に連結している。ハブアセンブリ120には、シース操縦機125が含まれ、収縮形態と拡張形態の間をシース本体112を操作可能に動かす。ハブアセンブリ120には、止血シールユニット130が含まれ、それには、シール部材(図示せず)が含まれ、プッシュ部材30又は別の介入装置等のそこを伸びる装置のあたりにシールを形成する。止血シールユニット130には、チューブ136への流体接続のためのルアロック等の連結端を有するサイドポート132が含まれる。チューブ136は、提供時のプッシャー部材30とシース本体110の間の環状空間に食塩水等の医療用流体を導入するのを容易にすることができる。止血シールユニットの一例がCAPTORTMバルブであり、クック・メディカル・インク(インディアナ州ブルーミントン)から商業的に入手できる。
【0037】
図4Aと図5は、シース本体112の典型的な壁構造を示している。シース本体112には、調節可能な管状構造体140と外側スリーブ144と内側スリーブ148等の外側部材と内側部材が含まれる。管状構造体140は、拡張性質と収縮性質をシース本体112に提供することができる。言い換えれば、管状構造体140は、半径方向に収縮構造と拡張構造の間を動く時に、シース本体112のために機械的支持を提供することができる。管状構造体140は、収縮・拡張が可能であり、シース本体112の直径及び長さを変える。ある実施例では、管状構造体140は、管状構造体140を作動させるまた別の構造体あるいは作動体を必要とする受動装置である。また別の実施例では、管状構造体140はバネや付勢力を有する能動装置であり、外力が加えられないときにバイアスされた収縮形態や拡張形態となる。例えば、管状構造体140が現時点で収縮形態でない時、管状構造体が、自動的に収縮形態に戻るようにバイアス(付勢)されるようにすることができる。管状構造体140には、網状フィラメント、らせん状部材、コイル部材、或いは、半径方向に機械的に動く当該技術分野で公知のその他の構造体等の多くの構造体が含まれる。
【0038】
ある実施例では、管状構造体140は、メッシュ部材、網状或いは織物のメッシュフィラメントから形成され、管状構造体が収縮形態から拡張形態の間を動くことができる。ある実施形態では、管状構造体は、網状又は折り合わされた素材、ワイヤ、リボン、ファイバー、ストランド、ヤム、単一フィラメント、マルチフィラメント、その他公知の形態或いは、本明細書で使用される、まとめて「フィラメント」として知られるものから作られる網状の構造体である。当該フィラメント素材には、ポリプロピレン、ポリエステル、ポリエチレン、ポリアミド(ナイロン)、ポリアミド共重合体、シリコン、ポリウレタン、その他の生物適合性エラストマーなどが含まれる。フィラメント部材は、ステンレス鋼、チタン、ニッケル・チタン合金、ニッケル・コバルト合金、別のコバルト合金等の合金、タンタル、ニチノール等の形状記憶材料等の金属でもよい。フィラメント素材は、円形、楕円形、長方形、正方形その他の当該技術分野で公知の幾何学的形状を有することができる。
【0039】
網状パターンのフィラメント素材は、収縮形態或いは、拡張形態にある時、シース本体112に十分な半径方向の柱強度を提供することができる。フィラメントは、時々「チャイニーズ・フィンガートラップ(Chinese finger trap)」網目と言われる2軸の網目状になっている。網目状フィラメントは、らせん形態でシース本体の長手軸に沿って伸びており、フィラメントの第1組は、共通の巻方向を有するが互いに対して軸方向に離れており、互いに対して軸方向に離れているが反対の巻方向を有するフィラメントの第2組と交差している。フィラメントの第1組とフィラメントの第2組は、長手方向軸に関して第1角度で互いに交差しており、網目構造の長さに沿った合力はゼロである。これは、フィラメントによる制約によるもので、管状構造体140を収縮形態或いは拡張形態へと動かすことになる。軸方向の力が管状構造体140の長さに沿って加えられると、網目の角度は、半径方向の圧縮が最小限(短縮が最大限)での長手方向軸に対する第2角度へと増加する。
【0040】
直径が0.15mmから0.6mm等の如何なるサイズのフィラメントのいくらでも、適切な直径のマンドレル上でらせん形のストラッドに織り合わすことができる。フィラメントの第1組(全体の半数)は、時計回りにらせん状に巻かれ、フィラメントの第2組(半数)は、反時計回りにらせん状に巻かれ、各時計回りのフィラメントは、反時計回りのフィラメントに隣接し、編み込まれている。フィラメントは、その関係が、以下の等式で示されているように第1角度α1でらせん状に巻かれている:cos(α1) = A/B。 Aは、wNと定義される。Nは、キャリアの数で、wは、フィラメントの幅である。Bは、2Π(1−SQRT(1−F))Dと定義される。Dは、管状構造体140の直径で、Fは、フィラメント(1.0−0.5)に覆われた突起領域の割合である。この等式は、スチュアート・リー(Stuart Lee)による合成物補強のハンドブック(ジョン・ウィリ・アンド・ソンズ(John Wiley and Sons)(1992年))に記載されており、その内容を完全な形で、本明細書に引用して援用する。管状構造体140のフィラメントは、少なくとも近位端で、接着、はんだ付け、溶接、高分子被覆等によってお互いに連結し、遠位端を含む管状構造体140の残りの中間部分は、半径方向に自由に動いたままである。管状構造体140は、焼戻し処理等の熱処理をし、所望の静止した網状形態にする。管状構造体は高分子被覆し、網状フィラメントの間の空間を埋める。高分子被覆は柔軟性があり、調節可能な管状構造体とともに半径方向と軸方向に動くことができる。管状作動体は被覆されずに、フィラメントの間をさらに自由に動くことができ、そのため、力量を減らし、調節可能な管状構造体を動かすことができる。
【0041】
外側スリーブ144は、管状構造体140の外表面の長さに沿って配置され、管状構造体のいかなる作動要素からも、体腔壁を保護する。内側スリーブ148は、管状構造体の内表面の長さに沿って配置され流体及び/又は介入装置のための剛性壁の管路を提供している。外側スリーブ144と内側スリーブ148は、互いに連結し、図に示されているように、反転したスリーブ部材を形成し、管状構造体140を囲む。スリーブの反転点145は、管状構造体140の遠位端142に位置する。外側スリーブ144及び/又は内側スリーブ148の素材は、柔軟性があり弾性があって管状構造体140の直径や長さの変化(増加あるいは減少)を調節できる限り、互いに同じであっても、違っていてもよい。例えば、当該素材は、シリコン、ウレタン、ゴム等のエラストマー素材でもよいが、当該目的のための当該技術分野に公知の如何なる適切な要素で代用することができる。代替素材には、以下のものが含まれる。ポリテトラフルオロエチレン(PTFE)、ポリアミド(例えば、ナイロン12)素材、ポリアミドブロック共重合(例えば、ポリエーテルブロックアミド(PEBA))或いはそれらの混合物(例えば、ナイロン12/PEBAとPEBA/PEBA混合物)、ポリオレフィン、ポリオレフィン共重合、及びそれらの混合物、ポリエステル(例えば、ポリエチレンテレフタラート(PET))、ジフェニルメタンジイソシアネート(MDI)、メチレンビスイソシアネート(HMDI)あるいはトルエンジイソシアネート(TDI)ハードセグメントのポリウレタン共重合体及び脂肪族ポリエステル、ポリエーテル、ポリカーボネートソフトセグメント(例えば、ペレセン(Pellethane)、エステン(Estane)、バイオネイト(Bionate))、及び、4GT(PBT)ハードセグメントとのポリエステル共重合体及び脂肪族ポリエステルあるいは、ポリエーテルソフトセグメント(例えば、ハイトレル(Hytrel)、ペルプレン(Pelprene)、或いはアーニテル(Arnitel))。内側スリーブ及び/又は外側スリーブ用部材は、軸緊張時にスリーブを強化するため、ファイバーで補強する。
【0042】
ある実施例では、外側スリーブ144と内側スリーブ148は、単一の管状スリーブから一体となって形成される。別の実施例では、外側スリーブ144と内側スリーブ148は、それぞれ、接着、溶接、はんだ付け、熱接合、縫合その他の当技術分野で公知の接着メカニズムによって、終端方法で、互いに接合している管状スリーブである。別の実施例では、外側スリーブと内側スリーブは、管状スリーブというよりはむしろ材料片である長手方向の部材である。外側スリーブ144の外面及び/又は内側スリーブ148の内面は、滑らかなコーティングを有している。滑らかな表面によって、介入装置は、シース本体を通り抜け、及び/又は、シール本体112がより有効的に身体血管を通り拔けることができる。例えば、シリコーン液コーティングあるいは、当該技術分野で公知の滑らかな特質を有するその他のコーティング等の滑らかなコーティングが表面に施される。又は、フッ素重合体、ヒドロゲルあるいは、当該技術分野で公知の円滑な特質を有するその他のフィルム等の円滑フィルムを使用することができる。
【0043】
図5では、止血シールユニット130の遠位端は、小径部分151を有する。小径部分151は、当該ユニット130を、内側スリーブ148の近位端149、及び/又は、管状構造体の近位端141に、機械的締まりばめ、接着、溶接、はんだ付け、熱接合、当該技術分野で公知のその他の接合メカニズムによって接合するために利用することができる。本実施例では、内側スリーブ148の近位端149は広がり、固定された関係で小径部151に接着する。管状構造体140の近位端141は広がり、固定された関係で内側スリーブ148の近位端149上の小径151に接着する。キャップ155は、近位端141と149に嵌合し、止血シールユニット130への嵌合のための近位端141、149と小径部151の間の十分な接触圧力を維持する。キャップ155の端開口部155Aは、拡張形態時には、シース本体の直径に等しい。言い換えると、シース本体112が収縮形態にある時、図5に示すように、小さい隙間が端開口部155Aの内縁とシース本体の外面の間に存在する。端開口部155Aは、修正されて、拡張形態と収縮形態の間のシース本体の動作時に、シース本体112との接触を維持する。例えば、エラストマーからできている柔軟なスリーブ等のスリーブは、端に置かれ、その直径にかかわらず、シース本体との接触を維持する。
【0044】
外側スリーブ144の近位端145は広がり、接着、溶接、はんだ付け、熱接合、或いは、当該技術分野の公知のその他の接着メカニズムによる固定関係で、リング支持体156に接着することができる。外側スリーブ144の近位端145は、内側スリーブ148の近位端149から遠位方向へ軸方向に空間が空いている。この配列によって、外側スリーブ144の近位端145と内側スリーブ148の近位端149の間の相対的な軸方向の動きを可能にする。外側スリーブと内側スリーブの間の当該相対的な動きによって、管状構造体140の収縮形態と拡張形態の間の動きが可能となる。シース本体112は、体腔の曲がりくねった部分を通り抜けることができるように、できるだけ柔軟であるのが望ましい。このために、管状構造体の動きを作動させるように管状構造体と相互作用する、如何なる長手方向の部材、ストラッド、硬化部材あるいはスタイレットなしで、シース本体112が提供されるのが望ましい。当該長手方向部材は、シース本体の剛性を増し、シース本体が曲がりくねった血管を通りぬける能力を最小限にする。
【0045】
外側スリーブと内側スリーブの間の当該相対的な動きを容易にするため、シース操縦機125には、カニューレ筐体158が含まれる。カニューレ筐体158は、止血シールユニット130とシース本体112の間にあるそれぞれのスリーブの近位端と管状構造体に嵌合する。カニューレ筐体158には、止血シールユニット130に隣接する近位端160とシース本体112あたりに配置される端開口部162Aを有する遠位端162が含まれる。カニューレ筐体158は、一定の直径を有するか、近位端160から遠位端162までテーパー状になっている。カニューレ筐体は、また、そのあたりにスリーブを有し、握りやすさを改善する。筐体158の端開口部162Aは、拡張形態における時は、シース本体112の直径に等しい。言い換えると、シース本体112が収縮形態にある時、図5に示すように、端開口部162Aの内縁とシース本体の外面の間に小さな隙間が生じる。端開口部162Aを変更し、シース本体の拡張形態と収縮形態の間の動きの間、シース本体との接触を維持する。例えば、エラストマーのスリーブ等のスリーブは、端に置くことができる。スリーブは、筐体とシース本体の外面の間をテーパー状になることができる。スリーブは、シース本体の動きの間、シース本体と密接な接触を維持するために、本体163よりも柔軟性がある。言い換えると、カニューレ筐体158の端開口部162Aは、シース本体の収縮形態と拡張形態の間の動きに合わせて収縮・拡張するよう構成される。
【0046】
カニューレ筐体158の内面168は、内空洞170を形成する。リング支持体156は、カニューレ筐体の内面168と摺動可能に係合することができる。リング支持体156は、摺動運動の間シース本体112の長手方向軸に実質的に垂直のままであるように構成される。突起あるいは、内側リング或いはリブの形態をした、2つの物理的ストップ装置172Aと172B等の一つ以上の物理的ストップ装置が、内面168に接着するか、内面168に沿って形成され、お互いに軸方向に空間を開けている。物理的ストップ装置172Aと172Bは、第1位置と第2位置(図5に図示)の間のリング支持体156の動きを制限し、シース本体112の最大の拡張形態と最大の収縮形態をそれぞれ画定する。当該ストップ装置は、摺動運動時に2つの範囲の間で、外側スリーブ144の近位端145と内側スリーブ148の近位端149の間の相対的位置を制限することができる。このために、リング支持体156が第1の近位の物理的ストップ装置172Aにある時、外側スリーブの近位端145は、内側スリーブの近位端149に極めて接近しており、シース本体は、拡張形態にある。リング支持体156が第2の遠位の物理的ストップ装置172Bにある時、外側スリーブの近位端145は、内側スリーブの近位端149から離れており、図5に示すように、シース本体は収縮形態にある。ある実施例では、リング支持体は、約4フレンチの1フレンチサイズの変化をするために、約2cm動くことができる。もっとも、これらの大きさは、所望の形態を達成するために変更することができる。
【0047】
更に、図4Aを参照すると、収縮形態と拡張形態の間のシース本体112の動きが示されている。シース本体112を収縮するために、利用者は、第2物理的ストップ装置172Bの方へ遠位方向にリング支持体156を作動させることができる。これによって、外側スリーブ144が、固定される可能性のある内側スリーブ142に対して矢印180で表されている第1方向へ遠位方向に動き、スリーブが反転点145で反転する。スリーブの反転点は、管状構造体140に軸方向の圧力を加わえる位置から離れ、管状構造体140が収縮するのを許容する。例えば、管状構造体140が網状構造体である時、網状フィラメントは、お互いに対して回転し、その間の網目の角度を減らす。その結果、管状構造体140の直径は収縮し、管状構造体の長さは増加する。管状構造体が収縮形態にバイアスされているときは、遠位端142における力の除去によって、管状構造体140は、自動的に収縮形態に戻る。
【0048】
シース本体を拡張するために、利用者は、第1物理的ストップ装置172Aへと近位方向にリング支持体156を作動させることができる。これによって、外側スリーブ144は、内側スリーブ142に対して矢印182で示されるように第2方向へと近位方向に動き、反転点145においてスリーブが反転する。そのため、スリーブの反転点145は、管状構造体140に軸方向の圧力を加え、このために、管状構造体は、短くなり拡張する。例えば、管状構造体が網状構造体である時、網状フィラメントは、互いに回転し、その間の網目の角度を増す。その結果、管状構造体の直径は拡張し、管状構造体の長さは縮小する。管状構造体が拡張形態にバイアスされているときは、遠位端142からの軸方向の力を除去することで、管状構造体140は、自動的に拡張形態に戻ることができる。
【0049】
図4Bと図4Cによると、シース本体112には、そこに形成される放射線不透過性部材を有し、蛍光透視法その他の画像技術の下で、シース本体の大きさや形状を示す。放射線不透過性部材には、銀、金、プラチナ、タンタル、タングステン、或いはそれらの派生的な合金形態が含まれるが、それらに限定されない。図4Bでは、シース本体112は、収縮形態にある。放射線不透過性部材166が内側スリーブ142と外側スリーブ144に塗布され、放射線不透過性部材は重なり、第1長さX1と第1直径Y1となる。シース本体112が完全に拡張した形態へと動いた時には、放射線不透過性部材は、第2長さX2と第2直径Y2へと増加する。放射線不透過性部材のあるポリマー層の構成は、米国特許第5,300,048号と米国特許公開公報第2001/0037065号に記載されており、それぞれ、その内容を完全な形で、本明細書に引用して援用する。変更を加え、放射線不透過性部材の長さや直径が増加する代わりに、減少することができることは、当業者は理解できる。いずれにせよ、放射線不透過性部材は、臨床医がシース本体の正確な形状を決定するのに役立つ。
【0050】
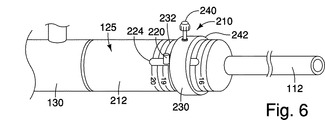
図6は、シース操縦装置125がロッキングシステム210とともに提供されていることを示しており、第1物理的ストップ装置と第2物理的ストップ装置の間の中間位置にカニューレ筐体212内にリング支持体を選択的に配置している。これによって、利用者は、最大径と最小径の間の異なる直径にシース本体112を拡張したり縮小することができる。ロッキングシステム210には、カニューレ筐体212に形成されるスロット224から外側に伸びるトリガエレメント220が含まれる。シール部材(図示せず)がスロット224に提供され、トリガエレメント220を囲み、カニューレ筐体内からの漏れを防止する。トリガエレメント220は、トリガエレメントの動きがリング構造体の動きに対応するように(カニューレ筐体内の内側に)リング構造体に連結する。利用者は、リング構造体をシース本体の所望の直径の位置に動かすため、直接、トリガエレメント220に力を加える。利用者は、シース本体の直径を維持するために、トリガエレメント220の位置をスロット224内に維持する。カニューレ筐体の表面に、16フレンチ(F)、17F、18F、19F及び20Fといったようにシース本体の半径の大きさが視覚的に示されている。スロット224の端は、図5の内部突起あるいはリブの代わり、或いは、内部突起あるいはリブに加えて、物理的ストップ装置として機能する。
【0051】
ある実施例では、ロッキングシステム210には、可動性のカラー(collar)230が含まれる。カラー230は、トリガエレメント220に連結しており、スロット内のトリガエレメントの位置は維持される。図6は、トリガエレメントの近位側でトリガエレメント220と隣接関係にあるカラー230を描いているが、カラーは、遠位側に置くことができる。カラー230は、カラー230の動きが直接トリガエレメントの動きに対応するように、トリガエレメントに取り付けられる。カラー230は、カニューレ筐体212に嵌合することができ、また、カニューレ筐体212に螺合することができる。例えば、カラー230は、複数の内部ネジを有し、カニューレ筐体212は、複数の外部ネジを有する。カラー212が対応する方向の回転によってカニューレ筐体212に対して近位方向か遠位方向のいずれかに軸方向に動くように、ネジは、互いに係合している。ネジ係合は、従来の様々なフレンチサイズにおいてシース本体112の直径を正確に制御し、従来のフレンチサイズ間での配置を提供する。ピン万力240が、カラー230に配置され、カニューレ筐体212に対して固定位置にカラー230の位置を固定する。ピン万力240には、カラー230内に形成されたネジ開口部242と係合するネジシャフトが含まれる。拡大されたヘッドがピン万力に含まれ、利用者のためにより有効な握り面を提供する。ピン万力240は、固定方向に回転し、ピン万力の端をカニューレ筐体212との摩擦接触に置き、当該圧力によって、カニューレ筐体212に対するカラー230の動きやトリガエレメント220の動きを防止する。ピン万力240を弛緩方向に回転させ、ピン万力の端をカニューレ筐体212との摩擦接触から取り除き、カラー230とカニューレ筐体212の間の相対的な動きとトリガエレメント220の動きを許容する。
【0052】
別の実施例では、カラーは、回転する代わりに滑ってカニューレ筐体212上を動く。例えば、外部ネジ232は、カニューレ筐体に形成された溝をつめで動かしている。ピン万力240は搭載されたバネのつめである。つめは、ロックキング位置でバイアスがかかっており、つめの端をカニューレ筐体212の溝との摩擦接触に置き、当該圧力によって、カニューレ筐体212に対するカラー230の如何なる動きもトリガエレメント220の如何なる動きも防止する。つめをロックされていない位置に引き抜き、つめの端をカニューレ筐体212との摩擦接触から取り除き、カラー230とカニューレ筐体212の間の相対的な軸方向の動きやトリガエレメント220の動きを許容する。
【0053】
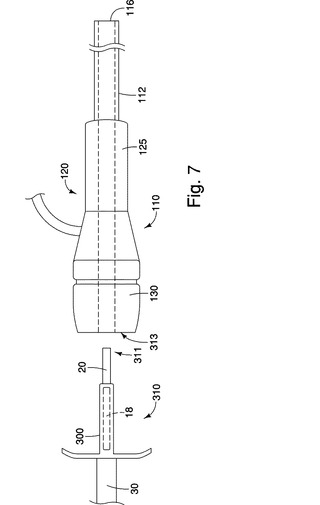
イントロデューサシースの使用上の利点の一例は、イントロデューサ装置への人工器官の搭載時である。図7では、内側カニューレ(図示せず)のセグメントが人工器官18(破線で示す)等の医療装置内に挿入され、取り外し可能な固定シース300によって半径方向に圧縮されている形態で全体的に制約されている。一つ以上の内側カニューレ、プッシャー部材30、拡張器の先端20及び固定シース300によって固定されている人工器官18はサブアセンブリ310を形成する。サブアセンブリ310の遠位端311は、ハブアセンブリ120を通ってイントロデューサシース110の近位端313内に挿入される。挿入時には、固定シース300は、人工器官18から外され、人工器官18は、シース本体112によって半径方向に圧縮された形態で固定される。図7によると、挿入前と挿入時には、シース本体112は、例えば約20フレンチの大きさで、拡張形態に動き、せん断力あるいは、シース本体と内面に対して置かれる人工器官18の間の摩擦力を最小限にする。これによって、搭載時や人工器官が内面をこする時、人工器官の軸方向の動き、及び/又は、変形のリスクを減らすことができる。サブアセンブリ310は、拡張シース本体112内を移動でき、ブッシュ部材30は、人工器官18をシース本体112の遠位端116へと押す。その時、シース本体112の遠位端116は、拡張器の先端20に対して所望の位置に整列する。この時、人工器官18は、外側シース本体112と内側カニューレの間の環状空間の約60%から80%を占める。シース本体は、例えば、約16フレンチ等の本明細書で述べた収縮形態へと動き、人工器官18の送給位置を設定し、体腔に導入される前に、シース本体112の側面を減らす。その結果、環状空間の大きさは減り、人工器官18は、外側シース本体112と内側カニューレの間の環状空間の約90%から95%を占める。
【0054】
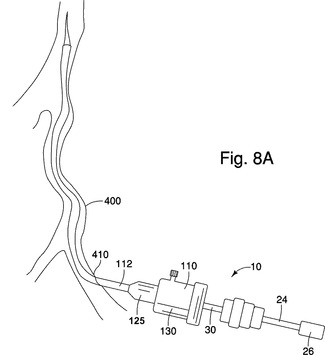
図8Aから図8Dは、人工器官18等の医療装置を動脈、静脈、体管、その他体内の管状通路等の体腔に留置する際、イントロデューサ装置10を形成するサブアセンブリ310及びイントロデューサシース110の別の具体例を示している。イントロデューサシース110は、当業者が理解するように、サブアセンブリなしで体腔に導入できる。イントロデューサ装置10は、カテーテル、心臓部誘導、バルーン、人工器官、ステント、ステントグラフト等の様々な医療装置を体腔に経皮的に挿入するために利用される。例えば、ガイドワイヤは、セルディンガー技法を用いて、体腔400に導入する。本技術には、体腔400に針で外科的切開410を施すことが含まれ、針穴を通じて体腔にガイドワイヤを挿入する。針は引き抜くことができ、ガイドワイヤを所定の位置に置いておく。図8Aでは、イントロデューサ装置10をガイドワイヤ上を体腔へ挿入している。ある実施例では、イントロデューサ装置10は、拡張可能な人工器官18を送給して、留置するために使用される。イントロデューサ装置10は、体腔400を移動し、イントロデューサ装置10の遠位端は、体腔内の治療場所に配置する。シース本体112は、できるだけ柔軟性を維持できるように構成され、体腔の曲がりくねった場所を通ることができるのが望ましい。
【0055】
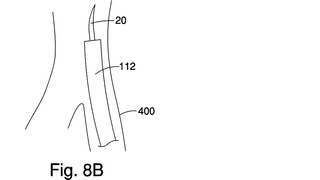
人工器官は、治療場所に留置することができる。図8Bでは、留置前に、シース本体112が本明細書で記載されているように、拡張形態に動くことができる。これによって、シース本体112の内面に対して置かれる人工器官により一般的に起きるせん断力又は摩擦を最小限にし、それによって、シース本体112を外すか、プッシャー部材を押すために、利用者が用いる力量を減らす。例えば、図8Cでは、人工器官18に対する拡張形態で、シース本体112を後退させることで、治療場所で人工器官が拡張することができる。又は、プッシャー部材を用いて、人工器官をシース本体の遠位端から押し、人工器官の拡張を許容する。人工器官18の留置後、拡張器の先端20、内側カテーテル24、プッシャー部材30及びイントロデューサシース以外のものは、図8Dに示すように、人体から取り除くことができる。シース本体は、その当初の利用の後、人体から取り除くために、拡張形態と収縮形態の間の位置に留まる。さらに、その当初の利用の後、シース本体112は、拡張形態に留まり、他の医療装置及び/又は介入装置のその後の体腔への通過を許容する。また、シース本体は、人体内の別の標的部位に移動する。それに続く装置の導入等のその最終の使用の後、シース本体112は、人体から取り外される。
【0056】
上記の様々な実施形態の特徴とその修正は、必要に応じて互いに代用し、又は、組み合わされる。本明細書に添付されている従属クレームの様々な特徴は、その望ましい組み合わせで互いに融通されることが理解される。
【0057】
様々な実施形態を示す図面は、必ずしも、一定の縮尺とはなっていない。図面の中には、強調するために、詳細が拡大されているものもあり、本開示に指定されていない限り、部分の数や割合は、それに限定されない。本明細書に明示的に示されていない実施形態は、本明細書に記述されている特徴を含めて本発明の範囲内で実践されることを当業者は理解するであろう。というのも、異なる実施形態は、互いに、及び/又は、現在公知であるか或いは将来開発される技術と組み合わされ、明細書で示された特許請求の範囲の範囲内に留まるからである。それ故、上記の詳細な説明は、例示的なもので、限定するものではないことが意図されている。そして、すべての均等解釈を含めて以下の特許請求の範囲は、本発明の精神と範囲を定義づけることを意図していることを理解されたい。
【技術分野】
【0001】
(優先権の主張)
本出願は、2011年8月2日に出願された米国仮特許出願第61/514,241号の優先権を主張する通常特許出願であり、その内容を完全な形で本明細書に引用して援用する。
【0002】
本開示は、例えば、体腔内に人工器官を留置したり、体腔に介入装置を導くためのイントロデューサシースを含む、送給装置に関する。また、本開示は、調節可能な直径とイントロデューサシースの直径を変えるメカニズムを有するイントロデューサシースを有する送給装置に関する。
【背景技術】
【0003】
数多くの処置が開発されており、血管や体管等の患者の体腔への医療装置の経皮的挿入が含まれる。当該装置は、公知の多様な技術によって体腔に導入される。例えば、セルディンガー技法を用いて、ガイドワイヤを血管に導入する。本技術には、針で血管に外科的開口部を作り、針穴を通じて血管にガイドワイヤを挿入することが含まれる。針は、引き抜くことができ、所定の位置にガイドワイヤを置いておく。そして、送給装置は、ガイドワイヤ上を血管へと挿入される。送給装置は、従来の方法で使用され、カテーテル、心臓部誘導、バルーン、ステント、ステントグラフト等の多様な医療装置を血管内に挿入する。
【0004】
例えば、送給装置は、損傷部位に、ステントグラフト等の拡張型人工器官を送給して留置し、損傷したり病気になったりした胆管や血管等の体腔を治療するのに用いられる。ステントグラフトは、通常、生体適合性グラフト材料の管状体から形成し、一つ以上のステントが、管状体に搭載されその支持を提供する。ステントは、バルーン拡張型ステント、及び/又は、自己拡張型ステントである。イントロデューサ送給・留置装置の使用による遠隔地から患者の体腔への人工器官の留置は、発明の名称が「人工器官と人工器官の留置方法と手段」という米国特許第7,435,253号(Hartley)に記載されており、その内容を完全な形で本明細書に引用して援用する。
【0005】
送給装置は、損傷部位に送給時に、送給形態に人工器官を留めるように構成されている。カテーテルは、典型的には、外側シースから間隔を置いた内側カニューレを含み、人工器官を収納する人工器官保持領域を形成する。人工器官は、人工器官保持領域に沿って内側カニューレに搭載され、外側シースは、人工器官を送給形態に保持する。送給装置が損傷部位に送給された後、例えば、内側カニューレに対して人工器官から離れるように外側シースを引き戻し、人工器官の拡張を許容して、当該人工器官は留置する。適切なサイズの人工器官の正確な配置は、治療のため、標的損傷部位を十分覆うものでなければならず、人工器官の端は、体腔の健全な組織と係合していなければならない。
【0006】
適切なサイズの人工器官をできるだけ小さい送給装置に搭載するのが望ましい。人工器官のサイズが送給装置のサイズ選択の一要因である上、体腔の形状及びサイズも重要となりうる。そのため、体腔よりも相対的に小さい送給装置を導入することによって、体腔や人体の他の部分に悪影響を及ぼすような、体腔内の流体や血流の潜在的滞おりを避けることができる。さらに、体腔は曲がりくねっていることもあり得るので、比較的小さな送給装置が曲がりくねった部分を通るのを容易にするのである。
【0007】
しかし、相対的に小さな送給装置にも問題がある。例えば、人工器官を搭載したり、及び/又は、留置する際に、人工器官と外側シースの間に大きなせん断力が生じうる。搭載、及び/又は留置時に人工器官に対して外側シースを動かそうとすると、大きなせん断力は、より大きな押力や引き抜き力を要することになる。大きなせん断力の第1要因は、外側シースと内側シースの間の環状空間内に、人工器官を搭載しすぎることによる。例えば、人工器官が環状空間の70%を超えて占有するとき、実質的に過剰搭載となり得る。そのため、できるだけ小さな外側シースとともにできるだけ大きな人工器官を留置したい時は、当該人工器官が環状空間を過剰充填することになり得る。当該過剰充填は、人工器官と外側シースの間のより大きな表面接触を生じ、人工器官から半径方向内側への動きをより少なくする。さらに、外側シースとの摩擦は、人工器官の円柱強度よりも大きくなり、長手方向の人工器官の変形を許容し、それによって、人工器官をアコーデオンのように崩壊させる。更に、ステント及び/又は刺等の人工器官の剛性部分は、外側シースの内面をこする。こすることによって、破片を形成し、そのため、体内に潜在的な塞栓を導入するリスクが増す。また、こすることで、保持力を危うくし、外側シースを弱める得る。それによって、外側シースは、不必要に、より大きな送給側面に膨らんでしまうこともあり得る。
【0008】
このため、送給装置内の人工器官の搭載および/又は留置を容易にし、特に、人工器官とイントロデューサシースの間に起こるせん断力を減らす必要性がある。更に、例えばせん断力の減少のための拡張構造と、例えばできるだけ小さい送給側面のための収縮構造との間を、人工器官の搭載及び留置の間と留置以後とにおいて、何回も半径方向に動くことのできるイントロデューサシースの必要性がある。
【発明の概要】
【0009】
本開示は、改良されたイントロデューサと、人工器官の搭載と体腔内の人工器官の留置のための方法を提供することを求めている。第1態様では、送給装置には、貫通するルーメンを形成する壁を有する管状構造体を含むイントロデューサシースが含まれる。管状構造体は、第1形態と第2形態の間を動くことができる。第1形態では、管状構造体は、第1直径と軸方向の第1長さを有し、第2形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。作動装置は、第1形態と第2形態の間に管状構造体を動かすことができる。作動装置は、互いに連結された内側部材と外側部材を含み、管状構造体を囲むことができる。内側部材は、管状構造体の内壁に沿って配置される。外側部材は、管状構造体の外壁に沿って配置される。当該両部材と管状構造体の間の第1方向の相対的な動きに応じて、作動装置は、管状構造体を第1形態へと動かし、第2方向では、作動装置は、管状構造体を第2形態へと動かす。
【0010】
別の形態によると、サブアセンブリを形成するために、キャリアとキャリアの領域に搭載される人工器官を有する送給装置が提供されている。当該装置には、通路を有し、摺動自在にサブアセンブリを収納する外側シースが含まれる。外側シースは、第1ポジションから第2ポジションの間を動くことができる操作可能部材を含むことができる。外側シースの壁は、操作可能部材と連結される近位端を有する調節可能な管状構造体と、管状構造体の内壁と外壁のそれぞれに沿って配置される内側部材と外側部材を含めることができる。対応する内側部材と外側部材の近位端は、操作可能部材に連結している。外側部材の遠位端は、内側部材の遠位端に連結され、反転可能な部材を形成する。第1ポジションと第2ポジションの間の操作可能部材の動きに応じて、内側部材の近位端と外側部材の近位端は、相対的に動き、選択的に管状構造体の直径を変化させる。
【0011】
更に別の態様では、人工器官を搭載、及び/又は、留置等のためのイントロデューサシースの直径を変化させる方法が提供されている。当該方法には、以下の1つ以上のステップが含まれる。ハブアセンブリに連結するシース本体が提供される。シース本体は、互いに連結し調節可能な管状構造体を囲み反転可能な部材を形成する、内側部材と外側部材を含むことができる。管状構造体は、第1形態と第2形態の間を動くことができる。第1形態では、管状構造体は、第1直径と軸方向の第1長さを有し、第2形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。内側部材と外側部材は、管状構造体に対して動き、管状構造体は、第1形態と第2形態の間を動くことができ、管状構造体の直径を変化させる。
【図面の簡単な説明】
【0012】
以下添付図面を参照しながら、本開示の実施形態を、例示として説明する。
【0013】
【図1】送給装置の一具体例の斜視図である。
【0014】
【図2】収縮形態のイントロデューサシースの一例の側面図である。
【0015】
【図3】拡張形態のイントロデューサシースの一例の側面図である。
【0016】
【図4A】イントロデューサシースが提供されるシース本体の断面図である。
【0017】
【図4B】放射線不透過性部材を有するシース本体の一具体例を描いている。
【図4C】図4Bと共に、放射線不透過性部材を有するシース本体の一具体例を描いている。
【0018】
【図5】シース操縦装置とイントロデューサシースが提供されたシース本体の一部断面図である。
【0019】
【図6】シース操縦装置とイントロデューサシースとともに提供されたロッキングシステムの斜視図である。
【0020】
【図7】人工器官を搭載している時、イントロデューサシースの直径を変化させる方法を示している。
【0021】
【図8A】体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【図8B】図8Aと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【図8C】図8A及び図8Bと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【図8D】図8A乃至図8Cと共に、体腔内で、イントロデューサシースの直径を変化させる方法を示している。
【発明を実施するための形態】
【0022】
本発明の理解のために、図面に示される実施形態を参照し、また同実施形態の説明のために具体的な用語が用いられる。図面は、概略図で、多様な構成要素は実物大では示していないことが理解される。多くの具体例において、図面は、読み手のために、構成要素を拡大して示している。また、図面では、異なる図にわたって、参照番号が対応する構成要素を指定していることに注意されたい。
【0023】
以下の記載では、「近位の」という用語と「遠位の」という用語が使用され、シースの反対の軸端と多様な構成要素の軸端を記述している。「近位の」という用語は、従来の意味で用いられ、装置の使用時に、装置或いはその構成要素の操作者に最も近い端を指している。「遠位の」という用語は、従来の意味で用いられ、患者に最初に挿入した或いは、使用時に患者に最も近い装置或いはその構成要素の端を指している。
【0024】
「介入装置」という用語は、実際に支持、修復或いは置換するか、そのように構成されているか、体の部分あるいは体の部分の機能を支持、修復或いは置換するために、それだけで、或いは、他の装置、物体或いは、構造体と組み合わせて用いられる装置、物体或いは構造体を指している。介入装置の具体例として、シース、カテーテル、ガイドワイヤ、心臓部誘導、血管閉塞装置、フィルター、人工器官、ステント、ステントグラフト及び送給・留置装置が含まれるが、それらに限定されない。
【0025】
図1は、送給装置10の一つの具体例を示しているが、それには、外部操縦部12、近位連結領域14及び遠位連結領域16が含まれる。近位連結領域14及び遠位連結領域16は、人工器官18の両端を固定することができる。人工器官18を留置する医療処置時に、近位連結領域14と遠位連結領域16は、患者の血管系を進んでいき、この実施例では、所望の留置場所へと進んでいくことができる。イントロデューサ装置10の近位端における外部操縦部12は、外科医に操作されイントロデューサを操縦するが、治療の間、患者の体外にとどまっている。
【0026】
遠位連結領域16は、拡張器の先端20を含むことができ、該拡張器は一般的に、従来のタイプのガイドワイヤ(図示せず)を受け入れるための孔22が設けられている。また、当該長手方向の孔22は、医療試薬の導入のためのチャネルを提供することもできる。例えば、造影剤を提供し、医療処置の配置・留置の段階時に血管造影法を行うことができる。
【0027】
内側カテーテル或いはカニューレ24は、従来は、柔軟性のある細い壁の金属チューブから作られ、拡張器の先端20に固定することができる。内側カテーテル24は、柔軟性があるので、イントロデューサ装置10は、大腿動脈等の比較的曲がりくねった血管に沿って進むことができ、イントロデューサ装置10の遠位端を長手方向に回転させて操縦することができる。内側カテーテル24は、キャリアを形成し、人工器官18あるいは患者に移植されるその他の装置を運ぶことができる。内側カテーテル24は、従来の方法で、イントロデューサ装置10を通って外側操縦部12へと伸び、連結装置26で終わることができる。連結装置26は、内側カテーテル24に試薬を導入することを容易にするため注射器を受けるように設計され、このため、一般的に、ネジ式ルアロック連結が提供される。
【0028】
シースプッシャー或いはロッド30(以下、「プッシャー部材」と称す)は、一般的に、プラスチック素材から作られるが、それが提供されるとき、内側カテーテル24と同心で、その半径方向外側に搭載することができる。プッシャー部材30は、「厚い壁」をしている。即ち、その壁の全外側サイズは、内側カテーテル24よりも数倍大きいのが好ましい。幾つかの具体例では、プッシャー部材30と内側カテーテル24は、同じ構成要素であってもよく、人工器官18が運ばれる場所では、外側直径が異なることもできる。プッシャー部材30と内側カテーテル24は、外側操縦領域12へと近位方向に伸びることもできる。
【0029】
外側シース32は、プッシャー部材30の同軸上でその半径方向外側にある。人工器官18は、ステント、ステントグラフト、その他のイントロデューサ装置10で送給可能な移植片或いは人工器官でもよく、外側シース32で圧縮された状態に保たれる。外側シース32は、外側操縦部12のシース操縦機・止血シールユニット34へと近位方向に伸びる。ユニット34には、止血シール(図示せず)と従来のルアロック38によってユニット34に備え付けられたサイドチューブ36が含まれる。
【0030】
また、シース操縦機・止血シールユニット34には、外側シースを当該ユニット34に固定するクランプカラー(図示せず)が含まれ、シリコンシールリング(図示せず)等のシール部材は、プッシャー部材30の周りに止血シールを形成する。サイドチューブ36は、プッシャー部材30と外側シース32の間の、例えば食塩水等の医療用流体物の導入を容易にすることができる。
【0031】
イントロデューサ装置10の組立時に、外側シース32を遠位連結領域16の拡張器の先端20の近位端上に進入させることができるが、人工器官18は、外力によって圧縮状態で保持される。適切な近位保持部(本図面では見ることができない)は、プッシャー部材に連結し、処置の間、人工器官18の近位端を保持することができる。人工器官18の遠位端には、ループ部材(図示せず)が提供され、遠位抑制ワイヤ42がそこを通って伸びている。また、遠位抑制ワイヤ42は、また、近位連結部にある隙間(図示せず)を通って、内側カテーテル24とプッシャー部材30の間に形成される環状空間44へと伸びる。遠位抑制ワイヤ42は、環状空間44を通って、操作領域12へと伸び、遠位ワイヤ解放メカニズム46において環状空間44を抜け出る。
【0032】
外部操縦部12の近位端には、本体48と次にはプッシャー部材30に搭載される少なくとも一つの抑制ワイヤ作動部50が含まれる。内側カテーテル24は、本体48を通り抜ける。遠位ワイヤ解放メカニズム46と近位ワイヤ解放メカニズム50は、本体48上の摺動可能な動きのために搭載することができる。締めつけネジ52は、移植片18の早期の不注意な解放を防ぐことができる。解放ワイヤが医療処置時に不必要な血液の損失がなく、本体48を貫いて伸びることができるように、止血シール(図示せず)が含まれる。
【0033】
外部操縦部12の近位部には、本体48の近位端に搭載されるピン万力54が含まれる。ピン万力54には、ねじぶた56がある。ねじ込まれると、ピン万力54の万力あご(図示せず)は、内側カテーテル24に対して固定し、或いは係合する。万力あごが係合すると、内側カテーテル24は、ただ、本体48と伴に動き、それゆえ、プッシャー部材30とともに、動くだけである。ねじぶた56が締め付けられていると、アセンブリ全体が一体に動く。
【0034】
イントロデューサ装置10が所望の留置位置にされると、外側シース32が引き抜かれ、近位ワイヤ解放メカニズム50と遠位ワイヤ解放メカニズム46が解放され人工器官18が広がることができる。ある処置のためには、人工器官18が広がった後に、シース32を残される。プッシャー部材30と内側カテーテル24が引き抜かれ、案内役として残されている外側シース32を用いて、さらなる介入装置で置換する。
【0035】
イントロデューサ装置の一構成要素がイントロデューサシースである。所望の直径で拡張形態と収縮形態の間を半径方向に動くことのできる管状構造体を有するイントロデューサシースが本明細書で説明される。例えば、介入装置の搭載時、介入装置の留置時、及び/又は、介入装置を通過させる時、この管状構造体は有用である。収縮形態では、管状構造体は、第1直径と軸方向の第1長さを有する。拡張形態では、管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有する。スリーブ状作動体が、管状構造体を第1形態と第2形態の間で動かすことができる。スリーブ状作動体には、内側スリーブと外側スリーブが含まれ、それらは、反転した管状スリーブを形成する。外側スリーブ・内側スリーブと管状構造体の間の第1方向あるいは第2方向における相対的な動きに応じて、管状構造体は、それぞれ、収縮形態あるいは拡張形態もしくはその間の位置に動くことができる。
【0036】
図2と図3は、第1の収縮形態と第2の拡張形態の間をそれぞれ動くことのできるシース本体112を有する送給装置の外側イントロデューサシース110のある実施例を示している。イントロデューサシース110は、外側シース32の代わりにイントロデューサ装置10に提供され、或いは、イントロデューサ装置とは別に利用することができる。収縮形態では、シース本体112は、第1直径D1と軸方向の第1長さL1を有する。拡張形態では、シース本体112は、より大きな第2直径D2とより短い軸方向の第2長さL2を有する。シース本体112は、近位端114と遠位端116を有する。ハブアセンブリ120は、シース本体112の近位端114に連結している。ハブアセンブリ120には、シース操縦機125が含まれ、収縮形態と拡張形態の間をシース本体112を操作可能に動かす。ハブアセンブリ120には、止血シールユニット130が含まれ、それには、シール部材(図示せず)が含まれ、プッシュ部材30又は別の介入装置等のそこを伸びる装置のあたりにシールを形成する。止血シールユニット130には、チューブ136への流体接続のためのルアロック等の連結端を有するサイドポート132が含まれる。チューブ136は、提供時のプッシャー部材30とシース本体110の間の環状空間に食塩水等の医療用流体を導入するのを容易にすることができる。止血シールユニットの一例がCAPTORTMバルブであり、クック・メディカル・インク(インディアナ州ブルーミントン)から商業的に入手できる。
【0037】
図4Aと図5は、シース本体112の典型的な壁構造を示している。シース本体112には、調節可能な管状構造体140と外側スリーブ144と内側スリーブ148等の外側部材と内側部材が含まれる。管状構造体140は、拡張性質と収縮性質をシース本体112に提供することができる。言い換えれば、管状構造体140は、半径方向に収縮構造と拡張構造の間を動く時に、シース本体112のために機械的支持を提供することができる。管状構造体140は、収縮・拡張が可能であり、シース本体112の直径及び長さを変える。ある実施例では、管状構造体140は、管状構造体140を作動させるまた別の構造体あるいは作動体を必要とする受動装置である。また別の実施例では、管状構造体140はバネや付勢力を有する能動装置であり、外力が加えられないときにバイアスされた収縮形態や拡張形態となる。例えば、管状構造体140が現時点で収縮形態でない時、管状構造体が、自動的に収縮形態に戻るようにバイアス(付勢)されるようにすることができる。管状構造体140には、網状フィラメント、らせん状部材、コイル部材、或いは、半径方向に機械的に動く当該技術分野で公知のその他の構造体等の多くの構造体が含まれる。
【0038】
ある実施例では、管状構造体140は、メッシュ部材、網状或いは織物のメッシュフィラメントから形成され、管状構造体が収縮形態から拡張形態の間を動くことができる。ある実施形態では、管状構造体は、網状又は折り合わされた素材、ワイヤ、リボン、ファイバー、ストランド、ヤム、単一フィラメント、マルチフィラメント、その他公知の形態或いは、本明細書で使用される、まとめて「フィラメント」として知られるものから作られる網状の構造体である。当該フィラメント素材には、ポリプロピレン、ポリエステル、ポリエチレン、ポリアミド(ナイロン)、ポリアミド共重合体、シリコン、ポリウレタン、その他の生物適合性エラストマーなどが含まれる。フィラメント部材は、ステンレス鋼、チタン、ニッケル・チタン合金、ニッケル・コバルト合金、別のコバルト合金等の合金、タンタル、ニチノール等の形状記憶材料等の金属でもよい。フィラメント素材は、円形、楕円形、長方形、正方形その他の当該技術分野で公知の幾何学的形状を有することができる。
【0039】
網状パターンのフィラメント素材は、収縮形態或いは、拡張形態にある時、シース本体112に十分な半径方向の柱強度を提供することができる。フィラメントは、時々「チャイニーズ・フィンガートラップ(Chinese finger trap)」網目と言われる2軸の網目状になっている。網目状フィラメントは、らせん形態でシース本体の長手軸に沿って伸びており、フィラメントの第1組は、共通の巻方向を有するが互いに対して軸方向に離れており、互いに対して軸方向に離れているが反対の巻方向を有するフィラメントの第2組と交差している。フィラメントの第1組とフィラメントの第2組は、長手方向軸に関して第1角度で互いに交差しており、網目構造の長さに沿った合力はゼロである。これは、フィラメントによる制約によるもので、管状構造体140を収縮形態或いは拡張形態へと動かすことになる。軸方向の力が管状構造体140の長さに沿って加えられると、網目の角度は、半径方向の圧縮が最小限(短縮が最大限)での長手方向軸に対する第2角度へと増加する。
【0040】
直径が0.15mmから0.6mm等の如何なるサイズのフィラメントのいくらでも、適切な直径のマンドレル上でらせん形のストラッドに織り合わすことができる。フィラメントの第1組(全体の半数)は、時計回りにらせん状に巻かれ、フィラメントの第2組(半数)は、反時計回りにらせん状に巻かれ、各時計回りのフィラメントは、反時計回りのフィラメントに隣接し、編み込まれている。フィラメントは、その関係が、以下の等式で示されているように第1角度α1でらせん状に巻かれている:cos(α1) = A/B。 Aは、wNと定義される。Nは、キャリアの数で、wは、フィラメントの幅である。Bは、2Π(1−SQRT(1−F))Dと定義される。Dは、管状構造体140の直径で、Fは、フィラメント(1.0−0.5)に覆われた突起領域の割合である。この等式は、スチュアート・リー(Stuart Lee)による合成物補強のハンドブック(ジョン・ウィリ・アンド・ソンズ(John Wiley and Sons)(1992年))に記載されており、その内容を完全な形で、本明細書に引用して援用する。管状構造体140のフィラメントは、少なくとも近位端で、接着、はんだ付け、溶接、高分子被覆等によってお互いに連結し、遠位端を含む管状構造体140の残りの中間部分は、半径方向に自由に動いたままである。管状構造体140は、焼戻し処理等の熱処理をし、所望の静止した網状形態にする。管状構造体は高分子被覆し、網状フィラメントの間の空間を埋める。高分子被覆は柔軟性があり、調節可能な管状構造体とともに半径方向と軸方向に動くことができる。管状作動体は被覆されずに、フィラメントの間をさらに自由に動くことができ、そのため、力量を減らし、調節可能な管状構造体を動かすことができる。
【0041】
外側スリーブ144は、管状構造体140の外表面の長さに沿って配置され、管状構造体のいかなる作動要素からも、体腔壁を保護する。内側スリーブ148は、管状構造体の内表面の長さに沿って配置され流体及び/又は介入装置のための剛性壁の管路を提供している。外側スリーブ144と内側スリーブ148は、互いに連結し、図に示されているように、反転したスリーブ部材を形成し、管状構造体140を囲む。スリーブの反転点145は、管状構造体140の遠位端142に位置する。外側スリーブ144及び/又は内側スリーブ148の素材は、柔軟性があり弾性があって管状構造体140の直径や長さの変化(増加あるいは減少)を調節できる限り、互いに同じであっても、違っていてもよい。例えば、当該素材は、シリコン、ウレタン、ゴム等のエラストマー素材でもよいが、当該目的のための当該技術分野に公知の如何なる適切な要素で代用することができる。代替素材には、以下のものが含まれる。ポリテトラフルオロエチレン(PTFE)、ポリアミド(例えば、ナイロン12)素材、ポリアミドブロック共重合(例えば、ポリエーテルブロックアミド(PEBA))或いはそれらの混合物(例えば、ナイロン12/PEBAとPEBA/PEBA混合物)、ポリオレフィン、ポリオレフィン共重合、及びそれらの混合物、ポリエステル(例えば、ポリエチレンテレフタラート(PET))、ジフェニルメタンジイソシアネート(MDI)、メチレンビスイソシアネート(HMDI)あるいはトルエンジイソシアネート(TDI)ハードセグメントのポリウレタン共重合体及び脂肪族ポリエステル、ポリエーテル、ポリカーボネートソフトセグメント(例えば、ペレセン(Pellethane)、エステン(Estane)、バイオネイト(Bionate))、及び、4GT(PBT)ハードセグメントとのポリエステル共重合体及び脂肪族ポリエステルあるいは、ポリエーテルソフトセグメント(例えば、ハイトレル(Hytrel)、ペルプレン(Pelprene)、或いはアーニテル(Arnitel))。内側スリーブ及び/又は外側スリーブ用部材は、軸緊張時にスリーブを強化するため、ファイバーで補強する。
【0042】
ある実施例では、外側スリーブ144と内側スリーブ148は、単一の管状スリーブから一体となって形成される。別の実施例では、外側スリーブ144と内側スリーブ148は、それぞれ、接着、溶接、はんだ付け、熱接合、縫合その他の当技術分野で公知の接着メカニズムによって、終端方法で、互いに接合している管状スリーブである。別の実施例では、外側スリーブと内側スリーブは、管状スリーブというよりはむしろ材料片である長手方向の部材である。外側スリーブ144の外面及び/又は内側スリーブ148の内面は、滑らかなコーティングを有している。滑らかな表面によって、介入装置は、シース本体を通り抜け、及び/又は、シール本体112がより有効的に身体血管を通り拔けることができる。例えば、シリコーン液コーティングあるいは、当該技術分野で公知の滑らかな特質を有するその他のコーティング等の滑らかなコーティングが表面に施される。又は、フッ素重合体、ヒドロゲルあるいは、当該技術分野で公知の円滑な特質を有するその他のフィルム等の円滑フィルムを使用することができる。
【0043】
図5では、止血シールユニット130の遠位端は、小径部分151を有する。小径部分151は、当該ユニット130を、内側スリーブ148の近位端149、及び/又は、管状構造体の近位端141に、機械的締まりばめ、接着、溶接、はんだ付け、熱接合、当該技術分野で公知のその他の接合メカニズムによって接合するために利用することができる。本実施例では、内側スリーブ148の近位端149は広がり、固定された関係で小径部151に接着する。管状構造体140の近位端141は広がり、固定された関係で内側スリーブ148の近位端149上の小径151に接着する。キャップ155は、近位端141と149に嵌合し、止血シールユニット130への嵌合のための近位端141、149と小径部151の間の十分な接触圧力を維持する。キャップ155の端開口部155Aは、拡張形態時には、シース本体の直径に等しい。言い換えると、シース本体112が収縮形態にある時、図5に示すように、小さい隙間が端開口部155Aの内縁とシース本体の外面の間に存在する。端開口部155Aは、修正されて、拡張形態と収縮形態の間のシース本体の動作時に、シース本体112との接触を維持する。例えば、エラストマーからできている柔軟なスリーブ等のスリーブは、端に置かれ、その直径にかかわらず、シース本体との接触を維持する。
【0044】
外側スリーブ144の近位端145は広がり、接着、溶接、はんだ付け、熱接合、或いは、当該技術分野の公知のその他の接着メカニズムによる固定関係で、リング支持体156に接着することができる。外側スリーブ144の近位端145は、内側スリーブ148の近位端149から遠位方向へ軸方向に空間が空いている。この配列によって、外側スリーブ144の近位端145と内側スリーブ148の近位端149の間の相対的な軸方向の動きを可能にする。外側スリーブと内側スリーブの間の当該相対的な動きによって、管状構造体140の収縮形態と拡張形態の間の動きが可能となる。シース本体112は、体腔の曲がりくねった部分を通り抜けることができるように、できるだけ柔軟であるのが望ましい。このために、管状構造体の動きを作動させるように管状構造体と相互作用する、如何なる長手方向の部材、ストラッド、硬化部材あるいはスタイレットなしで、シース本体112が提供されるのが望ましい。当該長手方向部材は、シース本体の剛性を増し、シース本体が曲がりくねった血管を通りぬける能力を最小限にする。
【0045】
外側スリーブと内側スリーブの間の当該相対的な動きを容易にするため、シース操縦機125には、カニューレ筐体158が含まれる。カニューレ筐体158は、止血シールユニット130とシース本体112の間にあるそれぞれのスリーブの近位端と管状構造体に嵌合する。カニューレ筐体158には、止血シールユニット130に隣接する近位端160とシース本体112あたりに配置される端開口部162Aを有する遠位端162が含まれる。カニューレ筐体158は、一定の直径を有するか、近位端160から遠位端162までテーパー状になっている。カニューレ筐体は、また、そのあたりにスリーブを有し、握りやすさを改善する。筐体158の端開口部162Aは、拡張形態における時は、シース本体112の直径に等しい。言い換えると、シース本体112が収縮形態にある時、図5に示すように、端開口部162Aの内縁とシース本体の外面の間に小さな隙間が生じる。端開口部162Aを変更し、シース本体の拡張形態と収縮形態の間の動きの間、シース本体との接触を維持する。例えば、エラストマーのスリーブ等のスリーブは、端に置くことができる。スリーブは、筐体とシース本体の外面の間をテーパー状になることができる。スリーブは、シース本体の動きの間、シース本体と密接な接触を維持するために、本体163よりも柔軟性がある。言い換えると、カニューレ筐体158の端開口部162Aは、シース本体の収縮形態と拡張形態の間の動きに合わせて収縮・拡張するよう構成される。
【0046】
カニューレ筐体158の内面168は、内空洞170を形成する。リング支持体156は、カニューレ筐体の内面168と摺動可能に係合することができる。リング支持体156は、摺動運動の間シース本体112の長手方向軸に実質的に垂直のままであるように構成される。突起あるいは、内側リング或いはリブの形態をした、2つの物理的ストップ装置172Aと172B等の一つ以上の物理的ストップ装置が、内面168に接着するか、内面168に沿って形成され、お互いに軸方向に空間を開けている。物理的ストップ装置172Aと172Bは、第1位置と第2位置(図5に図示)の間のリング支持体156の動きを制限し、シース本体112の最大の拡張形態と最大の収縮形態をそれぞれ画定する。当該ストップ装置は、摺動運動時に2つの範囲の間で、外側スリーブ144の近位端145と内側スリーブ148の近位端149の間の相対的位置を制限することができる。このために、リング支持体156が第1の近位の物理的ストップ装置172Aにある時、外側スリーブの近位端145は、内側スリーブの近位端149に極めて接近しており、シース本体は、拡張形態にある。リング支持体156が第2の遠位の物理的ストップ装置172Bにある時、外側スリーブの近位端145は、内側スリーブの近位端149から離れており、図5に示すように、シース本体は収縮形態にある。ある実施例では、リング支持体は、約4フレンチの1フレンチサイズの変化をするために、約2cm動くことができる。もっとも、これらの大きさは、所望の形態を達成するために変更することができる。
【0047】
更に、図4Aを参照すると、収縮形態と拡張形態の間のシース本体112の動きが示されている。シース本体112を収縮するために、利用者は、第2物理的ストップ装置172Bの方へ遠位方向にリング支持体156を作動させることができる。これによって、外側スリーブ144が、固定される可能性のある内側スリーブ142に対して矢印180で表されている第1方向へ遠位方向に動き、スリーブが反転点145で反転する。スリーブの反転点は、管状構造体140に軸方向の圧力を加わえる位置から離れ、管状構造体140が収縮するのを許容する。例えば、管状構造体140が網状構造体である時、網状フィラメントは、お互いに対して回転し、その間の網目の角度を減らす。その結果、管状構造体140の直径は収縮し、管状構造体の長さは増加する。管状構造体が収縮形態にバイアスされているときは、遠位端142における力の除去によって、管状構造体140は、自動的に収縮形態に戻る。
【0048】
シース本体を拡張するために、利用者は、第1物理的ストップ装置172Aへと近位方向にリング支持体156を作動させることができる。これによって、外側スリーブ144は、内側スリーブ142に対して矢印182で示されるように第2方向へと近位方向に動き、反転点145においてスリーブが反転する。そのため、スリーブの反転点145は、管状構造体140に軸方向の圧力を加え、このために、管状構造体は、短くなり拡張する。例えば、管状構造体が網状構造体である時、網状フィラメントは、互いに回転し、その間の網目の角度を増す。その結果、管状構造体の直径は拡張し、管状構造体の長さは縮小する。管状構造体が拡張形態にバイアスされているときは、遠位端142からの軸方向の力を除去することで、管状構造体140は、自動的に拡張形態に戻ることができる。
【0049】
図4Bと図4Cによると、シース本体112には、そこに形成される放射線不透過性部材を有し、蛍光透視法その他の画像技術の下で、シース本体の大きさや形状を示す。放射線不透過性部材には、銀、金、プラチナ、タンタル、タングステン、或いはそれらの派生的な合金形態が含まれるが、それらに限定されない。図4Bでは、シース本体112は、収縮形態にある。放射線不透過性部材166が内側スリーブ142と外側スリーブ144に塗布され、放射線不透過性部材は重なり、第1長さX1と第1直径Y1となる。シース本体112が完全に拡張した形態へと動いた時には、放射線不透過性部材は、第2長さX2と第2直径Y2へと増加する。放射線不透過性部材のあるポリマー層の構成は、米国特許第5,300,048号と米国特許公開公報第2001/0037065号に記載されており、それぞれ、その内容を完全な形で、本明細書に引用して援用する。変更を加え、放射線不透過性部材の長さや直径が増加する代わりに、減少することができることは、当業者は理解できる。いずれにせよ、放射線不透過性部材は、臨床医がシース本体の正確な形状を決定するのに役立つ。
【0050】
図6は、シース操縦装置125がロッキングシステム210とともに提供されていることを示しており、第1物理的ストップ装置と第2物理的ストップ装置の間の中間位置にカニューレ筐体212内にリング支持体を選択的に配置している。これによって、利用者は、最大径と最小径の間の異なる直径にシース本体112を拡張したり縮小することができる。ロッキングシステム210には、カニューレ筐体212に形成されるスロット224から外側に伸びるトリガエレメント220が含まれる。シール部材(図示せず)がスロット224に提供され、トリガエレメント220を囲み、カニューレ筐体内からの漏れを防止する。トリガエレメント220は、トリガエレメントの動きがリング構造体の動きに対応するように(カニューレ筐体内の内側に)リング構造体に連結する。利用者は、リング構造体をシース本体の所望の直径の位置に動かすため、直接、トリガエレメント220に力を加える。利用者は、シース本体の直径を維持するために、トリガエレメント220の位置をスロット224内に維持する。カニューレ筐体の表面に、16フレンチ(F)、17F、18F、19F及び20Fといったようにシース本体の半径の大きさが視覚的に示されている。スロット224の端は、図5の内部突起あるいはリブの代わり、或いは、内部突起あるいはリブに加えて、物理的ストップ装置として機能する。
【0051】
ある実施例では、ロッキングシステム210には、可動性のカラー(collar)230が含まれる。カラー230は、トリガエレメント220に連結しており、スロット内のトリガエレメントの位置は維持される。図6は、トリガエレメントの近位側でトリガエレメント220と隣接関係にあるカラー230を描いているが、カラーは、遠位側に置くことができる。カラー230は、カラー230の動きが直接トリガエレメントの動きに対応するように、トリガエレメントに取り付けられる。カラー230は、カニューレ筐体212に嵌合することができ、また、カニューレ筐体212に螺合することができる。例えば、カラー230は、複数の内部ネジを有し、カニューレ筐体212は、複数の外部ネジを有する。カラー212が対応する方向の回転によってカニューレ筐体212に対して近位方向か遠位方向のいずれかに軸方向に動くように、ネジは、互いに係合している。ネジ係合は、従来の様々なフレンチサイズにおいてシース本体112の直径を正確に制御し、従来のフレンチサイズ間での配置を提供する。ピン万力240が、カラー230に配置され、カニューレ筐体212に対して固定位置にカラー230の位置を固定する。ピン万力240には、カラー230内に形成されたネジ開口部242と係合するネジシャフトが含まれる。拡大されたヘッドがピン万力に含まれ、利用者のためにより有効な握り面を提供する。ピン万力240は、固定方向に回転し、ピン万力の端をカニューレ筐体212との摩擦接触に置き、当該圧力によって、カニューレ筐体212に対するカラー230の動きやトリガエレメント220の動きを防止する。ピン万力240を弛緩方向に回転させ、ピン万力の端をカニューレ筐体212との摩擦接触から取り除き、カラー230とカニューレ筐体212の間の相対的な動きとトリガエレメント220の動きを許容する。
【0052】
別の実施例では、カラーは、回転する代わりに滑ってカニューレ筐体212上を動く。例えば、外部ネジ232は、カニューレ筐体に形成された溝をつめで動かしている。ピン万力240は搭載されたバネのつめである。つめは、ロックキング位置でバイアスがかかっており、つめの端をカニューレ筐体212の溝との摩擦接触に置き、当該圧力によって、カニューレ筐体212に対するカラー230の如何なる動きもトリガエレメント220の如何なる動きも防止する。つめをロックされていない位置に引き抜き、つめの端をカニューレ筐体212との摩擦接触から取り除き、カラー230とカニューレ筐体212の間の相対的な軸方向の動きやトリガエレメント220の動きを許容する。
【0053】
イントロデューサシースの使用上の利点の一例は、イントロデューサ装置への人工器官の搭載時である。図7では、内側カニューレ(図示せず)のセグメントが人工器官18(破線で示す)等の医療装置内に挿入され、取り外し可能な固定シース300によって半径方向に圧縮されている形態で全体的に制約されている。一つ以上の内側カニューレ、プッシャー部材30、拡張器の先端20及び固定シース300によって固定されている人工器官18はサブアセンブリ310を形成する。サブアセンブリ310の遠位端311は、ハブアセンブリ120を通ってイントロデューサシース110の近位端313内に挿入される。挿入時には、固定シース300は、人工器官18から外され、人工器官18は、シース本体112によって半径方向に圧縮された形態で固定される。図7によると、挿入前と挿入時には、シース本体112は、例えば約20フレンチの大きさで、拡張形態に動き、せん断力あるいは、シース本体と内面に対して置かれる人工器官18の間の摩擦力を最小限にする。これによって、搭載時や人工器官が内面をこする時、人工器官の軸方向の動き、及び/又は、変形のリスクを減らすことができる。サブアセンブリ310は、拡張シース本体112内を移動でき、ブッシュ部材30は、人工器官18をシース本体112の遠位端116へと押す。その時、シース本体112の遠位端116は、拡張器の先端20に対して所望の位置に整列する。この時、人工器官18は、外側シース本体112と内側カニューレの間の環状空間の約60%から80%を占める。シース本体は、例えば、約16フレンチ等の本明細書で述べた収縮形態へと動き、人工器官18の送給位置を設定し、体腔に導入される前に、シース本体112の側面を減らす。その結果、環状空間の大きさは減り、人工器官18は、外側シース本体112と内側カニューレの間の環状空間の約90%から95%を占める。
【0054】
図8Aから図8Dは、人工器官18等の医療装置を動脈、静脈、体管、その他体内の管状通路等の体腔に留置する際、イントロデューサ装置10を形成するサブアセンブリ310及びイントロデューサシース110の別の具体例を示している。イントロデューサシース110は、当業者が理解するように、サブアセンブリなしで体腔に導入できる。イントロデューサ装置10は、カテーテル、心臓部誘導、バルーン、人工器官、ステント、ステントグラフト等の様々な医療装置を体腔に経皮的に挿入するために利用される。例えば、ガイドワイヤは、セルディンガー技法を用いて、体腔400に導入する。本技術には、体腔400に針で外科的切開410を施すことが含まれ、針穴を通じて体腔にガイドワイヤを挿入する。針は引き抜くことができ、ガイドワイヤを所定の位置に置いておく。図8Aでは、イントロデューサ装置10をガイドワイヤ上を体腔へ挿入している。ある実施例では、イントロデューサ装置10は、拡張可能な人工器官18を送給して、留置するために使用される。イントロデューサ装置10は、体腔400を移動し、イントロデューサ装置10の遠位端は、体腔内の治療場所に配置する。シース本体112は、できるだけ柔軟性を維持できるように構成され、体腔の曲がりくねった場所を通ることができるのが望ましい。
【0055】
人工器官は、治療場所に留置することができる。図8Bでは、留置前に、シース本体112が本明細書で記載されているように、拡張形態に動くことができる。これによって、シース本体112の内面に対して置かれる人工器官により一般的に起きるせん断力又は摩擦を最小限にし、それによって、シース本体112を外すか、プッシャー部材を押すために、利用者が用いる力量を減らす。例えば、図8Cでは、人工器官18に対する拡張形態で、シース本体112を後退させることで、治療場所で人工器官が拡張することができる。又は、プッシャー部材を用いて、人工器官をシース本体の遠位端から押し、人工器官の拡張を許容する。人工器官18の留置後、拡張器の先端20、内側カテーテル24、プッシャー部材30及びイントロデューサシース以外のものは、図8Dに示すように、人体から取り除くことができる。シース本体は、その当初の利用の後、人体から取り除くために、拡張形態と収縮形態の間の位置に留まる。さらに、その当初の利用の後、シース本体112は、拡張形態に留まり、他の医療装置及び/又は介入装置のその後の体腔への通過を許容する。また、シース本体は、人体内の別の標的部位に移動する。それに続く装置の導入等のその最終の使用の後、シース本体112は、人体から取り外される。
【0056】
上記の様々な実施形態の特徴とその修正は、必要に応じて互いに代用し、又は、組み合わされる。本明細書に添付されている従属クレームの様々な特徴は、その望ましい組み合わせで互いに融通されることが理解される。
【0057】
様々な実施形態を示す図面は、必ずしも、一定の縮尺とはなっていない。図面の中には、強調するために、詳細が拡大されているものもあり、本開示に指定されていない限り、部分の数や割合は、それに限定されない。本明細書に明示的に示されていない実施形態は、本明細書に記述されている特徴を含めて本発明の範囲内で実践されることを当業者は理解するであろう。というのも、異なる実施形態は、互いに、及び/又は、現在公知であるか或いは将来開発される技術と組み合わされ、明細書で示された特許請求の範囲の範囲内に留まるからである。それ故、上記の詳細な説明は、例示的なもので、限定するものではないことが意図されている。そして、すべての均等解釈を含めて以下の特許請求の範囲は、本発明の精神と範囲を定義づけることを意図していることを理解されたい。
【特許請求の範囲】
【請求項1】
イントロデューサシースを備える送給装置であって、前記イントロデューサシースは、
貫通するルーメンを形成する壁を有する管状構造体であって、第1形態と第2形態の間を可動で、第1形態では、第1直径と軸方向の第1長さを有し、第2形態では、より大きな第2直径と軸方向のより短い第2長さを有する調節可能な管状構造体と、
前記第1形態と前記第2形態の間で前記管状構造体を動かす作動装置とを
有し、
前記作動装置は、前記管状構造体を囲むために互いに連結する内側部材と外側部材を備え、前記内側部材は、管状構造体の内壁に沿って配置し、外側部材は、前記管状構造体の外壁に沿って配置し、前記外側部材と前記内側部材は、前記管状構造体に対して可動であり、
前記作動装置は、前記外側及び内側部材と前記管状構造体の間の第1方向での相対的な動きに応じて前記管状構造体が前記第1形態へ動くことを許容し、第2方向での相対的動きに応じて、前記管状構造体が前記第2形態へ動くことを許容するようなされている、
送給装置。
【請求項2】
前記管状構造体は、網状構造を備える、請求項1に記載の送給装置。
【請求項3】
前記管状構造体は、第1形態にバイアスするバイアス力を有する、請求項1に記載の送給装置。
【請求項4】
前記管状構造体は遠位端を備え、前記作動装置は、管状構造体の遠位端あたりで反転点において反転して内側部材と外側部材を形成する環状スリーブを備え、前記反転点は、外側部材と内側部材と管状構造体の間の前記第2方向への相対的な動きに応じて管状構造体の遠位端に軸方向の力を加えるよう作動する、請求項1に記載の送給装置。
【請求項5】
前記外側部材と前記内側部材の各々が近位端を備え、前記内側部材の近位端は、前記外側部材の近位端から軸方向に間隔を空けている、請求項1に記載の送給装置。
【請求項6】
内側部材の近位端は固定されており、外側部材の近位端は、内側部材の固定された近位端に対して可動である、請求項5に記載の送給装置。
【請求項7】
さらに、前記管状構造体、前記内側部材、及び前記外側部材と連結するハブアセンブリを備える、請求項6に記載の送給装置。
【請求項8】
前記管状構造体は、近位端を有し、前記管状構造体の前記近位端と前記内側部材の前記近位端は、前記ハブアセンブリの遠位端に連結している、請求項7に記載の送給装置。
【請求項9】
前記ハブアセンブリの前記遠位端に連結するカニューレ筐体を更に備える、請求項8に記載の送給装置。
【請求項10】
前記外側部材の近位端は、カニューレ筐体内を摺動可能なリング支持体と連結されている、請求項9に記載の送給装置。
【請求項11】
前記カニューレ筐体は、そこに形成されるスロットを備え、前記リング支持体は、前記スロットを通って外側に伸びるトリガエレメントを備える、請求項10に記載の送給装置。
【請求項12】
前記カニューレ筐体と可動的に連結されるカラー(a collar)と、前記カラーと前記カニューレ筐体の間の相対的位置を固定するために、前記カラーに連結されるロック可能なピンを更に備える、請求項11に記載の送給装置。
【請求項13】
前記外側部材と前記内側部材は、前記管状構造体に連結されておらず、選択的に前記管状構造体を所望の直径に動かすために、前記管状構造体の各壁に沿って前記第1方向と前記第2方向の両方向に摺動可能とされている、請求項1に記載の送給装置。
【請求項14】
細長い本体を有するキャリアと、
前記キャリアの領域に搭載され、サブアセンブリを形成する人工器官と、
内部に通路を有する外側シースと
を有する送給装置であって、
前記通路は、前記サブアセンブリを摺動自在に収納するように構成され、前記外側シースは、第1位置と第2位置の間を可動である操作可能部材と、貫通するルーメンを形成する壁を有する管状構造体であって、前記操作可能部材と連結された近位端を有する管状構造体と、前記管状構造体の内壁に沿って配置された内側部材であって、前記操作可能部材と連結する近位端と、遠位端とを有する内側部材と、前記管状構造体の外壁に沿って配置される外側部材であって、前記操作可能部材に連結された近位端と前記内側部材の遠位端に連結し反転可能な部材を形成する遠位端を有する外側部材とを有し、
前記第1位置と前記第2位置の間の操作可能部材の動きに応じて、前記内側部材の前記近位端と前記外側部材の前記近位端が相対的に動き、前記管状構造体の直径を選択的に変化させる、
送給装置。
【請求項15】
前記外側シースは、更に、カニューレ筐体を備え、前記操作可能部材は、外側部材の近位端に連結され、カニューレ筐体に対して摺動可能に動かされるリング構造体を備える、請求項14に記載の送給装置。
【請求項16】
前記操作可能部材素は、ロッキングシステムを備え、前記カニューレ筐体に対して前記リング構造体の位置を選択的に固定し、前記管状構造体の前記直径が選択的に固定されるようにした、請求項15に記載の送給装置。
【請求項17】
前記管状構造体は、収縮形態となるようにするバイアス力を有する、請求項14に記載の送給装置。
【請求項18】
前記管状構造体は遠位端を備え、前記反転可能部材は、前記管状構造体の前記遠位端あたりで反転点において反転する管状スリーブを備え、
第1位置への操作可能部材の動きに応じて、前記管状構造体が収縮形態に動くことができ、
第2位置への操作可能部材の動きに応じて、前記反転点が前記管状構造体の遠位端へ軸方向の力を加え、前記管状構造体を短縮し、半径方向に拡張させる、請求項17に記載の送給装置。
【請求項19】
イントロデューサシースの直径を変える方法であって、
ハブアセンブリに連結されたシース本体であって、、互いに連結されて、調節可能な管状構造体を囲み、反転可能な部材を形成する内側部材と外側部材を有し、前記管状構造体は、第1形態と第2形態の間を可動的で、前記第1形態では、前記管状構造体は、第1直径と軸方向の第1長さを有し、前記第2形態では、前記管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有するようにされている、シース本体を提供し、
前記管状構造体に対して前記外側部材と前記内側部材を動かし、前記管状構造体が前記第1形態と前記第2形態の間で動いて、前記管状構造体の前記直径を変えるようにすることを含む、
イントロデューサシースの直径を変える方法。
【請求項20】
前記管状構造体に対して前記反転可能部材の位置を固定し、前記管状構造体の前記直径を固定することを更に含む、請求項19に記載の方法。
【請求項1】
イントロデューサシースを備える送給装置であって、前記イントロデューサシースは、
貫通するルーメンを形成する壁を有する管状構造体であって、第1形態と第2形態の間を可動で、第1形態では、第1直径と軸方向の第1長さを有し、第2形態では、より大きな第2直径と軸方向のより短い第2長さを有する調節可能な管状構造体と、
前記第1形態と前記第2形態の間で前記管状構造体を動かす作動装置とを
有し、
前記作動装置は、前記管状構造体を囲むために互いに連結する内側部材と外側部材を備え、前記内側部材は、管状構造体の内壁に沿って配置し、外側部材は、前記管状構造体の外壁に沿って配置し、前記外側部材と前記内側部材は、前記管状構造体に対して可動であり、
前記作動装置は、前記外側及び内側部材と前記管状構造体の間の第1方向での相対的な動きに応じて前記管状構造体が前記第1形態へ動くことを許容し、第2方向での相対的動きに応じて、前記管状構造体が前記第2形態へ動くことを許容するようなされている、
送給装置。
【請求項2】
前記管状構造体は、網状構造を備える、請求項1に記載の送給装置。
【請求項3】
前記管状構造体は、第1形態にバイアスするバイアス力を有する、請求項1に記載の送給装置。
【請求項4】
前記管状構造体は遠位端を備え、前記作動装置は、管状構造体の遠位端あたりで反転点において反転して内側部材と外側部材を形成する環状スリーブを備え、前記反転点は、外側部材と内側部材と管状構造体の間の前記第2方向への相対的な動きに応じて管状構造体の遠位端に軸方向の力を加えるよう作動する、請求項1に記載の送給装置。
【請求項5】
前記外側部材と前記内側部材の各々が近位端を備え、前記内側部材の近位端は、前記外側部材の近位端から軸方向に間隔を空けている、請求項1に記載の送給装置。
【請求項6】
内側部材の近位端は固定されており、外側部材の近位端は、内側部材の固定された近位端に対して可動である、請求項5に記載の送給装置。
【請求項7】
さらに、前記管状構造体、前記内側部材、及び前記外側部材と連結するハブアセンブリを備える、請求項6に記載の送給装置。
【請求項8】
前記管状構造体は、近位端を有し、前記管状構造体の前記近位端と前記内側部材の前記近位端は、前記ハブアセンブリの遠位端に連結している、請求項7に記載の送給装置。
【請求項9】
前記ハブアセンブリの前記遠位端に連結するカニューレ筐体を更に備える、請求項8に記載の送給装置。
【請求項10】
前記外側部材の近位端は、カニューレ筐体内を摺動可能なリング支持体と連結されている、請求項9に記載の送給装置。
【請求項11】
前記カニューレ筐体は、そこに形成されるスロットを備え、前記リング支持体は、前記スロットを通って外側に伸びるトリガエレメントを備える、請求項10に記載の送給装置。
【請求項12】
前記カニューレ筐体と可動的に連結されるカラー(a collar)と、前記カラーと前記カニューレ筐体の間の相対的位置を固定するために、前記カラーに連結されるロック可能なピンを更に備える、請求項11に記載の送給装置。
【請求項13】
前記外側部材と前記内側部材は、前記管状構造体に連結されておらず、選択的に前記管状構造体を所望の直径に動かすために、前記管状構造体の各壁に沿って前記第1方向と前記第2方向の両方向に摺動可能とされている、請求項1に記載の送給装置。
【請求項14】
細長い本体を有するキャリアと、
前記キャリアの領域に搭載され、サブアセンブリを形成する人工器官と、
内部に通路を有する外側シースと
を有する送給装置であって、
前記通路は、前記サブアセンブリを摺動自在に収納するように構成され、前記外側シースは、第1位置と第2位置の間を可動である操作可能部材と、貫通するルーメンを形成する壁を有する管状構造体であって、前記操作可能部材と連結された近位端を有する管状構造体と、前記管状構造体の内壁に沿って配置された内側部材であって、前記操作可能部材と連結する近位端と、遠位端とを有する内側部材と、前記管状構造体の外壁に沿って配置される外側部材であって、前記操作可能部材に連結された近位端と前記内側部材の遠位端に連結し反転可能な部材を形成する遠位端を有する外側部材とを有し、
前記第1位置と前記第2位置の間の操作可能部材の動きに応じて、前記内側部材の前記近位端と前記外側部材の前記近位端が相対的に動き、前記管状構造体の直径を選択的に変化させる、
送給装置。
【請求項15】
前記外側シースは、更に、カニューレ筐体を備え、前記操作可能部材は、外側部材の近位端に連結され、カニューレ筐体に対して摺動可能に動かされるリング構造体を備える、請求項14に記載の送給装置。
【請求項16】
前記操作可能部材素は、ロッキングシステムを備え、前記カニューレ筐体に対して前記リング構造体の位置を選択的に固定し、前記管状構造体の前記直径が選択的に固定されるようにした、請求項15に記載の送給装置。
【請求項17】
前記管状構造体は、収縮形態となるようにするバイアス力を有する、請求項14に記載の送給装置。
【請求項18】
前記管状構造体は遠位端を備え、前記反転可能部材は、前記管状構造体の前記遠位端あたりで反転点において反転する管状スリーブを備え、
第1位置への操作可能部材の動きに応じて、前記管状構造体が収縮形態に動くことができ、
第2位置への操作可能部材の動きに応じて、前記反転点が前記管状構造体の遠位端へ軸方向の力を加え、前記管状構造体を短縮し、半径方向に拡張させる、請求項17に記載の送給装置。
【請求項19】
イントロデューサシースの直径を変える方法であって、
ハブアセンブリに連結されたシース本体であって、、互いに連結されて、調節可能な管状構造体を囲み、反転可能な部材を形成する内側部材と外側部材を有し、前記管状構造体は、第1形態と第2形態の間を可動的で、前記第1形態では、前記管状構造体は、第1直径と軸方向の第1長さを有し、前記第2形態では、前記管状構造体は、より大きな第2直径と軸方向のより短い第2長さを有するようにされている、シース本体を提供し、
前記管状構造体に対して前記外側部材と前記内側部材を動かし、前記管状構造体が前記第1形態と前記第2形態の間で動いて、前記管状構造体の前記直径を変えるようにすることを含む、
イントロデューサシースの直径を変える方法。
【請求項20】
前記管状構造体に対して前記反転可能部材の位置を固定し、前記管状構造体の前記直径を固定することを更に含む、請求項19に記載の方法。
【図1】


【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図8D】
【図2】
【図3】
【図4A】
【図4B】
【図4C】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図8C】
【図8D】
【公開番号】特開2013−34867(P2013−34867A)
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−171578(P2012−171578)
【出願日】平成24年8月2日(2012.8.2)
【出願人】(511152957)クック メディカル テクノロジーズ エルエルシー (76)
【氏名又は名称原語表記】COOK MEDICAL TECHNOLOGIES LLC
【Fターム(参考)】
【公開日】平成25年2月21日(2013.2.21)
【国際特許分類】
【出願番号】特願2012−171578(P2012−171578)
【出願日】平成24年8月2日(2012.8.2)
【出願人】(511152957)クック メディカル テクノロジーズ エルエルシー (76)
【氏名又は名称原語表記】COOK MEDICAL TECHNOLOGIES LLC
【Fターム(参考)】
[ Back to top ]