
可変駆動ピン速度方式の空気圧駆動射出弁、改良型射出システム及び改良型射出方法
【課題】種々の流体材料特性に適合する高い性能を備えた改良型射出弁を提供する。
【解決手段】改良型空気圧射出弁(10)は、空気圧ピストン(80)が納められている第1及び第2のチャンバを備えたハウジングを有する。第1及び第2の電磁弁(82,84)が空気圧力をこれらチャンバにそれぞれ供給したりこれらを排気したりするよう構成されている。コントローラ(104 )がチャンバの加圧及び空気抜きを調整するよう動作可能である。コントローラは両チャンバを加圧するオーバーラップ時間を制御するよう第1及び第2の電磁弁のための制御信号のタイミングを制御する。オーバーラップ時間の制御によってコントローラは射出弁の駆動ピンの速度及び射出弁が材料液滴を射出するために閉じる速度を制御する。これにより射出されるべき材料の粘度に最も適した弁速度を選択することができる。
【解決手段】改良型空気圧射出弁(10)は、空気圧ピストン(80)が納められている第1及び第2のチャンバを備えたハウジングを有する。第1及び第2の電磁弁(82,84)が空気圧力をこれらチャンバにそれぞれ供給したりこれらを排気したりするよう構成されている。コントローラ(104 )がチャンバの加圧及び空気抜きを調整するよう動作可能である。コントローラは両チャンバを加圧するオーバーラップ時間を制御するよう第1及び第2の電磁弁のための制御信号のタイミングを制御する。オーバーラップ時間の制御によってコントローラは射出弁の駆動ピンの速度及び射出弁が材料液滴を射出するために閉じる速度を制御する。これにより射出されるべき材料の粘度に最も適した弁速度を選択することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、一般に、流体材料の射出又は噴出に関し、特に、電空式射出弁(ジェッティングバルブ)、射出システム及び改良型射出方法に関する。
【0002】
〔関連出願の説明〕
本願は、本願と同日に出願された米国特許出願(現時点では、出願番号未付与)(発明の名称:“MODULAR JETTING DEVICES”)(代理人事件番号:NOR‐1414US)に関連しており、この米国特許出願を参照により引用し、その記載内容全体を本明細書の一部とする。
【背景技術】
【0003】
射出弁は、電子包装組立てにおいて、基板上に流体材料の微小な点状体又はドットを射出するために用いられている。流体材料、例えばアンダーフィル(余盛不足)用材料、封入用材料、表面実装接着剤、はんだペースト、導電性接着剤並びにはんだマスク材料、はんだフラックス及び熱的配合物を射出する射出弁について多くの用途がある。流体材料の種類が変わると、射出弁は、流体材料の変化にマッチするよう適合されなければならない。「射出弁(ジェッティングバルブ)」又は「射出装置」は、ディスペンサからの材料の液滴を噴出し又は「射出」して基板上に着地させる装置であり、この場合、液滴は、ディスペンサノズルから離れ、その後基板に接触する。かくして、射出型ディスペンサでは、小出しされた液滴は、ディスペンサと基板との間では「飛行中(in-flight )」であり、ディスペンサと基板との間の距離の少なくとも一部に関し、ディスペンサにも基板にも接触していない。
【0004】
射出弁によって射出することができる材料は、種々の特性、例えば粘度、弾性等を有する場合がある。特性が変化すると、射出弁からの適正な射出を促進するために種々のニードル速度が必要である。ニードル速度は、射出された流体材料の重要な特性、例えば離脱、点状体速度及び衛星状発生(satellite generation)に影響を及ぼす。
【0005】
射出弁は、ニードルが弁座に当たったときに流体材料を射出するために用いられるニードルを動かす空気圧ピストンを用いて電空式(電気空気圧式)に作動されるのが良い。電空式射出弁の従来設計では、単一の電磁弁が空気圧力を空気圧ピストンにもたらして射出弁を開くよう用いられ、戻しばねが材料の液滴を射出するのに十分に速い速度で射出弁を閉じるために用いられる。その結果、ニードル又は駆動ピンの速度は、極めて可変であるわけではなく、一般に、比較的狭い範囲内に留まっている。ニードル速度が比較的狭い範囲に制限されていると仮定すると、かかる射出装置では射出可能な材料の粘度範囲も同様に制限される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来型射出弁は、或る特定の用途に適していることが判明しているが、種々の流体材料特性に適合する高い性能を備えた改良型射出弁が要望されている。
【課題を解決するための手段】
【0007】
駆動ピン速度を制御するオーバーラップ期間を備えた空気圧射出弁
一実施形態では、流体材料供給源及び空気圧供給源用の射出弁が提供される。射出弁は、空気圧ピストン及び空気圧ピストンから延びる駆動ピンを備えた空気圧アクチュエータを有する。射出弁は、第1のチャンバ及び第2のチャンバを備えたハウジングを更に有する。第1及び第2の電磁弁が空気圧供給源に連結されている。第1の電磁弁は、空気圧ピストン及び駆動ピンを第1の方向に動かすために第1の力を空気圧ピストンに加えるよう空気圧力が第1のチャンバに供給される第1の状態を有する。第1の電磁弁は、第1の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有する。第2の電磁弁は、空気圧ピストン及び駆動ピンを第2の方向に動かすために第2の力を空気圧ピストンに加えるよう空気圧力が第2のチャンバに供給される第1の状態を有する。第2の電磁弁は、第2の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有する。
【0008】
射出弁は、流体チャンバ及びノズルを更に有するのが良い。流体チャンバは、弁座及び弁要素を収納するのが良い。ノズルは、小出しオリフィス及び弁座と流体連通状態にある流れ通路を有する。弁要素は、小出しオリフィスから材料の液滴を射出するよう弁座と接触関係をなす位置まで動くことができる。
【0009】
射出弁のコントローラが第1の電磁弁を第1の期間にわたり第1の状態に保持し、第2の電磁弁を第2の期間にわたり第1の状態に保持するよう動作可能であり、第2の期間の開始は、第1の期間の開始に続く。駆動ピンは、第2の期間中、弁座に向かって動かされ、第2の期間中における駆動ピンのこの運動により、弁要素が動いて弁座に接触し、それにより材料の液滴が射出される。コントローラは、第1の期間と第2の期間との間に所定のオーバーラップ期間を維持する。オーバーラップ期間は、駆動ピンが第2の期間中、弁座に向かって動かされているときに駆動ピンの速度を制御するために用いられ、それにより、弁要素が弁座と接触するときの弁要素の速度が制御される。駆動ピンの運動が速ければ速いほど、弁要素の運動はそれだけ一層速くなる。
【0010】
射出弁は、流体チャンバを収容した流体モジュールを更に有するのが良い。第2の期間中における駆動ピンの運動により、駆動ピンは、流体モジュールに接触し、駆動ピンと流体モジュールの接触により、弁要素が動いて弁座に接触する。射出弁は、流体モジュール内に弾性部材を更に有するのが良く、弾性部材は、弁要素を付勢してこれを弁座から離すよう構成されている。
【0011】
射出弁のハウジングは、ばね付勢力を空気圧ピストンに及ぼすばねを収容するのが良い。ばねは、空気圧ピストンが第1のチャンバに供給された圧縮空気によって第1の方向に動かされるときに圧縮されるのが良く、ばねは、空気圧ピストンが第2のチャンバに供給された圧縮空気によって第2の方向に動かされるときに拡張されるのが良い。
【0012】
射出弁の弁要素を動かして弁座に接触させるたびに、ノズルオリフィスを通って材料の液滴を射出することができる。
【0013】
空気圧射出装置の弁速度を制御するためのユーザインタフェースを備えたシステム
別の実施形態では、材料を射出するシステムであって、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧ピストンを備えた空気圧射出装置及びユーザが弁要素の速度を変えることができるようにするユーザインタフェースを備えたコントローラを有する材料射出システムが提供される。
【0014】
射出装置は、ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、上側及び下側ピストンチャンバは、独立電磁弁によって制御され、弁要素の速度は、電磁弁の制御によって制御される。
【0015】
別の実施形態では、電磁弁は、弁要素の速度を制御するために圧縮空気が上側ピストンチャンバと下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供するよう制御される。
【0016】
弁速度ユーザインタフェースを有する空気圧作動式射出装置からの射出方法
一方法では、射出装置は、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧駆動式ピストンを有し、ユーザが弁要素の速度を変化させるためにコントローラによって用いられる情報を入力するために用いることができるユーザインタフェースが設けられる。
【0017】
射出装置は、ピストンと互いに反対側に上側ピストンチャンバ及び下側ピストンチャンバを有するのが良く、これらピストンチャンバは、独立電磁弁によって制御され、弁要素の速度は、電磁弁の制御によって制御される。
【0018】
種々の他の方法が以下において説明されるが、かかる説明は、不必要な反復を回避するために本明細書では繰り返されない。
【0019】
本明細書に組み込まれたその一部をなす添付の図面は、本発明の例示の実施形態を示しており、上述の本発明の実施形態の概要説明及び以下に与えられる詳細な説明と一緒になって、本発明の実施形態の原理を説明するのに役立つ。
【図面の簡単な説明】
【0020】
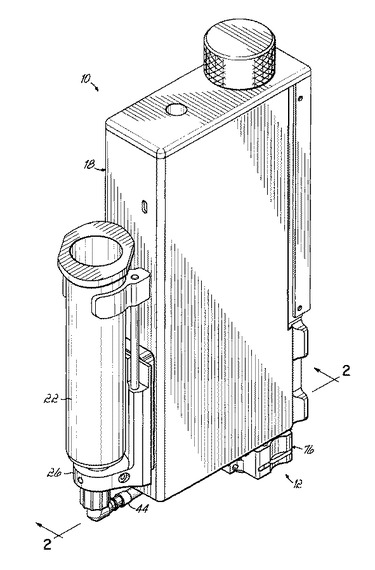
【図1A】本発明の実施形態としての射出弁の斜視図である。
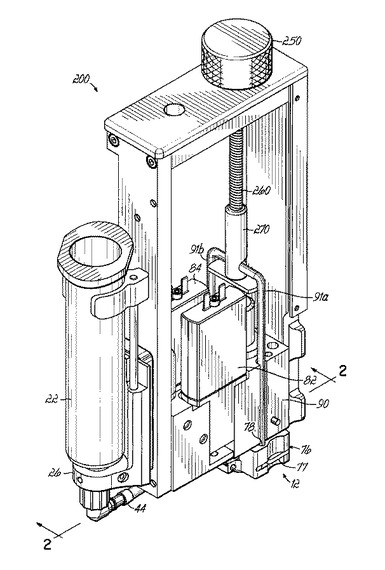
【図1B】図1Aに類似した斜視図であり、モジュール式射出装置の外側ハウジングが説明の目的上、省かれている図である。
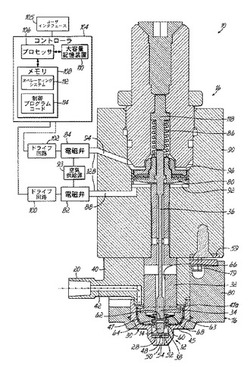
【図2】図1Bの全体として2‐2線に沿って取った断面図であり、ヒータ、流体モジュール及びピストンハウジング並びに圧縮空気をピストンチャンバに供給するコンポーネントを表した機能ブロックだけを示す図である。
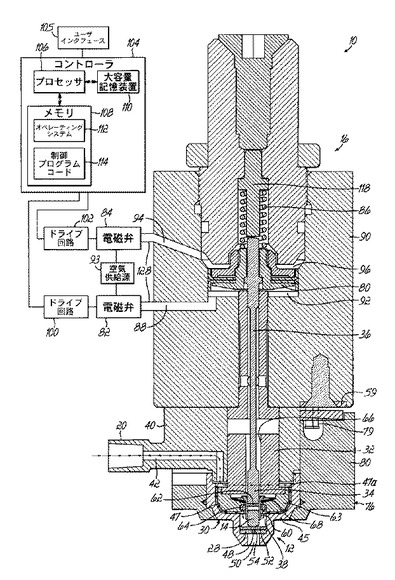
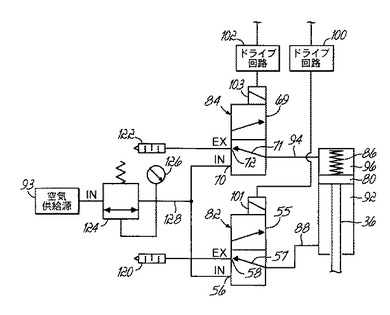
【図3】図1及び図2の射出弁の油圧回路の略図である。
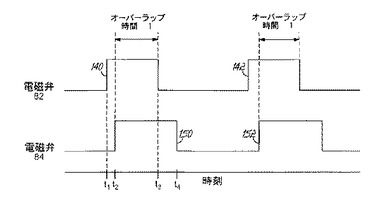
【図4】本発明の実施形態としての図1〜図3の電空式射出弁を作動させるために用いられる電磁弁のための制御信号の略図である。
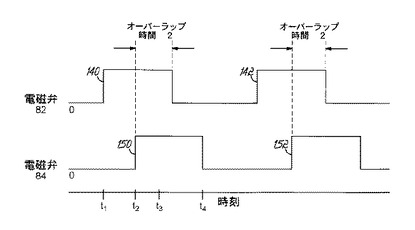
【図5】図4に類似した略図であり、空気圧力が空気チャンバに及ぼされるオーバーラップ時間を図4と比較して減少させるよう電磁弁のための制御信号のタイミングが変更されている状態を示す図である。
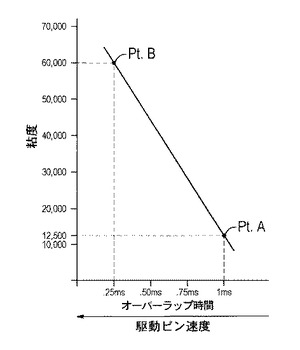
【図6】オーバーラップ時間と粘度との関係を表すグラフ図である。
【発明を実施するための形態】
【0021】
以下の幾つかの項において、本発明の種々の実施形態、特徴及びコンポーネントのうちの幾つかへの読者の手引きを助けるために副表題が設けられている。
【0022】
一般に、本発明の実施形態は、電空式アクチュエータの空気圧ピストンを作動させるために第1及び第2の電磁弁を用いた射出弁に関し、この電空式アクチュエータは、射出弁の開閉のための弁要素の運動を促進する。独立空気ラインが空気圧ピストンの頂部及び底部チャンバに結合されている。第1及び第2の電磁弁は、空気圧ピストンの頂部及び底部チャンバに供給される空気圧力を独立制御する。第1の電磁弁は、射出弁を開くために用いられ、第2の電磁弁は、射出弁を閉じるために用いられる。電磁弁を開閉させるピストンに固定されたニードルの速度を変化させるには、圧縮空気を頂部ピストンチャンバに供給する際の第2の電磁弁の作用が圧縮空気を底部ピストンチャンバに供給する際の第1の電磁弁の作用とオーバーラップする時間の長さを変えるのが良い。これら第1及び第2の電磁弁を制御する電気パルスのオーバーラップの量を制御することによって、オペレータは、ニードル速度を制御することができ、それにより射出中の流体材料に最適なニードル速度をその流体材料特性に基づいて選択し又は生じさせることができる。
【0023】
図1A〜図3を参照すると、本発明の実施形態によれば、射出弁又はジェッティングバルブ10は、流体モジュール12を有し、この流体モジュールは、弁要素14、電空式アクチュエータ16、外側カバー18及び流体インタフェース20を有している。外側カバー18は、薄板金で構成され、この外側カバーは、従来型締結具によって射出弁10の内部フレーム構造に締結されている。射出弁10は、付属物として外側カバー18に取り付けられたシリンジホルダ26を有している。シリンジ22がシリンジホルダ26により支持され、射出弁10にはシリンジ22から加圧流体材料が供給される。一般に、流体材料は、当業者によって知られている射出しやすい任意の材料又は物質であって良く、かかる流体材料としては、はんだフラックス、はんだペースト、接着剤、はんだマスク、熱的配合物、油、封入剤、注封(ポッティング)配合物、インキ及びシリコーンが挙げられるがこれらには限定されない。シリンジ22内の流体材料がなくなり又は交換されると、シリンジ22は、シリンジホルダ26から取り外されて交換される。
【0024】
射出弁10は、例えば流体材料を小分けして点状体又はドットとして基板、例えばプリント回路板上に間欠的に射出する機械又はシステム(図示せず)内のロボットに取り付けられるのが良い。射出弁10は、流体材料の一連の射出量が互いに間隔を置いた点状体の線として基板上に付着されるよう作動されるのが良い。射出弁10の標的としての基板は、種々の表面実装部品を支持するのが良く、このためには、微少量の流体材料を迅速に射出すること及び基板上の標的場所に流体材料を付着させる上で正確な配置構成が必要である。
【0025】
流体モジュール
図2において最も良く見えるように、流体モジュール12は、ノズル28、モジュール本体30及び流体結合インタフェース20と連通状態にある流体チャンバ38を有するのが良い。モジュール本体30の第1の区分又は部分40は、流体インタフェース20を通路47,47a(後で説明する)を介して流体チャンバ38と流体連通関係をなすようこれに結合する流体通路42を有している。流体導管44(図1B)が流体モジュール12をシリンジ22の中に入っている流体材料と流体連通関係に配置すると共に流体材料を圧力下でシリンジ22から流体結合インタフェース20に供給するためにシリンジ22から流体インタフェース20まで延びている。この実施形態では、流体導管44は、代表的には、シリンジ22の出口を流体結合インタフェース20に直接結合する1本の管であり、これらの間には介在する構造がなんら存在しない。一実施形態では、流体結合インタフェース20は、ルアー(Luer)継手を含む。
【0026】
シリンジ22は、加圧空気を用いて流体材料が流体インタフェース20の方へ流れるようにし、最終的に流体モジュール12の流体チャンバ38に流れるようにするよう構成されているのが良い。シリンジ22の中に入っている流体材料の上方のヘッドスペースに供給される加圧空気の圧力は、40psig〜60psigであるのが良い。代表的には、ワイパ又はプランジャ(図示せず)がヘッドスペース内の空気圧力とシリンジ22内の流体材料レベルとの間に配置され、密封キャップ(図示せず)が空気圧力を供給するためにシリンジバレルの開口端に固定されている。
【0027】
モジュール本体30の第2の区分又は部分45は、ノズル28を支持するよう構成されている。弁座52が流体出口42と流体チャンバ38との間に設けられている。弁座52は、流体出口42と流体連通状態にある開口部54を有している。
【0028】
流体モジュール12は、可動要素60の壁62の形態をした受板を更に有するのが良い。可動要素60の周囲に接触する付勢要素68が軸方向ばね力を可動要素60に加えるよう構成されている。
【0029】
密封リング64がインサート63と可動要素60の外部との間に密封係合をもたらす。密封リング又はOリング64の下に位置する可動要素60の部分は、流体チャンバ38の境界部の一部を構成する。弁要素14は、可動要素60に取り付けられており、この弁要素は、可動要素60の壁62と弁座52との間の場所で流体チャンバ38の内部に配置されている。変形例として、弁要素14及び可動要素60は、2つの別々の要素ではなく、単一一体の要素として構成されても良い。
【0030】
モジュール本体の第2の区分又は部分32は、摩擦嵌めによってインサート63の頂部に取り付けられている。モジュール本体の第2の部分45は、流体モジュールの他の全てのコンポーネントを包囲するよう摩擦嵌めによりモジュール本体の第1の部分40に取り付けられている。すなわち、第1の部分40と第2の部分45をいったん互いに押し付けると、これら部分は、流体モジュールのこれらの部分、即ち、ノズル28、弁座52、弁要素14、可動要素60、密封リング64、付勢要素68、インサート63及びモジュール本体の第3の部分32を包囲する。かくして、好ましい実施形態では、流体モジュールは、要素45,40,28,52,14,60,64,68,63,32で構成されている。摩擦嵌めの使用の代替手段として、ねじ結合を用いてこれらコンポーネントを容易に分解することができるようにしても良い。
【0031】
上述すると共に図2に示された組立て位置では、流体通路42を流体チャンバ38と流体連通関係をなすようこれに結合する通路47,47aは、次のように設けられる。環状通路47aは、モジュール本体30の第1の部分40と第3の部分32との間に設けられた空間によって作られる。通路47は、インサート63の外部に形成された溝又はチャネルにより提供される。インサート63をモジュール本体30の第2の部分45の中に圧力嵌めすると、インサート63の外部の溝及び第2の部分の内面は、通路47を形成する。インサート63を第2の部分45内に圧力嵌めするのではなく、第2の部分45にねじ込む場合、流体通路42から流体チャンバ38までの流路をもたらすためにインサート63を穴あけして流体通路を設けるのが良い。
【0032】
シリンジ
上述したように、流体導管44(図1)が流体モジュール12をシリンジ22の中に入っている流体材料と流体連通関係に配置すると共に流体材料を圧力下でシリンジ22から流体結合インタフェース20に供給するためにシリンジ22から流体インタフェース20まで延びている。流体導管44は、シリンジ22と流体結合インタフェース20を直接結合する1本の管であるのが良く、これらの間には介在する構造がなんら存在しない。流体材料は、通路42を通って流体チャンバ38に送られ、流体材料が射出弁10によって小出しされると、シリンジ22から到達した流体材料は、流体チャンバ38内の流体材料量を補充する。
【0033】
シリンジ22は、加圧空気を用いて流体材料を通路42に差し向け、最終的に流体モジュール12に設けられた通路47を通って流体チャンバ38に差し向けるよう構成されている。シリンジ22の中に入っている流体材料の上方のヘッドスペース内に設けられたワイパ又はプランジャ(図示せず)によって封じ込められる加圧空気は、5psig〜60psigの状態にあるのが良い。
【0034】
駆動ピン
駆動ピン36は、流体モジュール12と協働して射出弁10から流体材料を射出するよう弁要素14に間接的に結合されている。駆動ピン36の先端部34は、ハンマのように動作してその衝撃の際にその運動量を可動要素60の壁62に伝える。弁要素14は、駆動ピン36の先端部34から見て可動要素60の壁62の反対側で流体チャンバ38内に設けられている。作動された駆動ピン36の先端部34が可動要素60の壁62に衝突することにより、弁要素14は、弁座52に衝突し、そして流体材料を流体チャンバ38から射出する。駆動ピン36は、壁62に当たる際に駆動ピン36の運動が速ければ速いほど、弁要素がそれだけ一層迅速に動いて弁座52に衝突して材料の液滴を射出する。それゆえ、駆動ピン36の速度を上述した仕方で制御することによって、弁要素14の速度も又制御される。上述したように、付勢要素68は、軸方向ばね力を可動要素60に加えるよう可動要素60と接触状態にある。駆動ピン36が壁62を押し下げていないとき、弁要素14及び可動要素60は、付勢要素68によって加えられる軸方向ばね力によって弁座52から遠ざけられる。上述したように、可動要素60及び弁要素14は、2つの別々の部品ではなく、単一一体型部品として構成されても良い。
【0035】
ヒータ
伝熱部材として働く本体80を有するヒータ76が流体モジュール12を少なくとも部分的に包囲している。ヒータ76は、従来型発熱体(図示せず)、例えば本体80に設けられたボア内に位置するカートリッジ型抵抗発熱体を有するのが良い。ヒータ76は、ヒータ76に供給される電力を調整する際に温度コントローラによる使用のためのヒートバック信号をもたらす従来型温度センサ(図示せず)、例えば抵抗型感熱装置(RTD)、サーミスタ又は熱電対を更に備えるのが良い。ヒータ76は、ばね押しピン79を有し、これらばね押しピンは、温度センサのための信号経路を提供すると共に電力を発熱体及び温度センサに送るための電流経路を提供するためにピストンハウジング90内に設けられたそれぞれの接点59に接触する。
【0036】
図2で最も良く理解されるように、流体モジュール12は、ヒータ76内に嵌まり込んでいる。図1Aを参照すると、アーム91a,91bはヒータ76の穴78内に受け入れられた下端部を有し、これら下端部は、アーム91a,91bに設けられたスロット(図示せず)内に受け入れられているばね押しクリップ77によってヒータ76内に解除可能に固定されている。ノブ250を回すと、ノブ250に固定されているボルト260がアーム91a,91bに固定されているねじ山付きカラー270内で回転する。かくして、ノブ250は、ヒータ76及び流体モジュール12をピストン本体90に圧縮状態で接触させるまで回される。
【0037】
流体モジュール12及びヒータ76を取り外すためには、ノブ250を逆方向に回して流体モジュール12及びヒータ76を下降させてこれらをピストン本体90から離す。次に、ばね押しクリップ77を押し下げてクリップをアーム91a,91bのスロットから引き出し、その結果、流体モジュール12及びヒータ76を射出弁10から取り外すことができるようにする。流体モジュール12及びヒータ76を再び取り付けるには、アーム91a,91bの下端部をヒータ76の穴78内に挿入し、ついには、ラッチ77がアーム91a,91bのスロット内にスナップ動作で嵌まり込むようにする。次に、ノブ250をヒータ76及び流体モジュール12がピストン本体90に接触するまで回す。
【0038】
独立電磁弁を備えた互いに反対側に位置するピストン空気チャンバ
図2及び図3を参照すると、射出弁10の電空式アクチュエータ16は、駆動ピン36及び駆動ピン36の一端部に取り付けられた空気圧ピストン80を有している。1対の空気ピストンチャンバ92,96が射出弁10のピストンハウジング90内に形成され、これら空気ピストンチャンバは、空気圧ピストン80によって互いに分離されている。空気チャンバ92,96の各々の容積は、空気圧ピストン80の位置に応じて変化することができる。圧縮ばね86がばねリテーナ118と空気圧ピストン80との間に捕捉されている。圧縮ばね86により加えられる力は、空気圧ピストン80及び駆動ピン36に作用して駆動ピン36を可動要素60の壁62の方へ付勢する閉鎖力として働く。かくして、ピストンチャンバ92,96の両方を大気に空気抜きすると、ばね86は、駆動ピン36を壁62に押し付け、それにより、弁要素14が弁座52に押し付けられ、それにより射出弁10が常閉位置に維持される。
【0039】
射出弁10は、電磁弁82,84を有し、電磁弁82,84は、空気供給源93から空気チャンバ92,96への空気圧力の流れを制御するために用いられる電気機械式装置である。空気チャンバ92は、空気圧ピストン80の一方の側に設けられ、空気チャンバ96は、空気チャンバ92から見て空気圧ピストン80の反対側に設けられている。空気圧ピストン80が空気チャンバ92,96の選択的加圧に応答して動くと、空気チャンバ92,96の各々の容積が変化することになる。
【0040】
第1の電磁弁82は、射出弁10のハウジング90を貫通した第1の通路88によって空気圧ピストン80の一方の側の空気チャンバ92に結合されている。図3に示されているように、第1の電磁弁82は、空気入口ポート56、空気出口又は排気ポート58及び空気入口ポート56か空気出口ポート58かのいずれかに結合するよう切り替え可能な流路57を備えた機械弁55を含む。第1の電磁弁82は、空気圧力を空気供給源93から空気入口ポート56及び第1の通路88から空気チャンバ92に送るか空気圧力を第1の通路88及び空気出口ポート58を通って空気チャンバ92から逃がすかのいずれかを行うよう構成されている。空気チャンバ92を加圧する空気圧力は、空気チャンバ92と境界部を共有する空気圧ピストン80の表面領域に作用して力を空気圧ピストン80及び空気圧ピストン80に連結された駆動ピン36に加えて駆動ピン36を流体モジュール12から遠ざかる方向に動かす。
【0041】
第2の電磁弁84は、射出弁10のハウジング90を貫通した第2の通路94によって空気チャンバ96に結合されている。第2の電磁弁84は、空気入口ポート70、空気出口又は排気ポート72及び空気入口ポート70か空気出口ポート72かのいずれかに結合するよう切り替え可能な流路71を備えた機械弁69を含む。第2の電磁弁84は、空気圧力を空気供給源93から空気入口ポート70及び第2の通路94から空気チャンバ96に送るか空気圧力を第2の通路94及び空気出口ポート72を通って空気チャンバ96から逃がすかのいずれかを行うよう構成されている。空気チャンバ96を加圧する空気圧力は、空気チャンバ96と境界部を共有する空気圧ピストン80の表面領域に作用して、空気チャンバ92内の空気圧力によって加えられる力とは方向が逆の力を空気圧ピストン80及び空気圧ピストン80に連結された駆動ピン36に加えて駆動ピン36を流体モジュール12に近づける方向に動かす。
【0042】
電磁弁82の排気部は、消音器120を備え、電磁弁84の排気部も又、消音器122を備えている。消音器120,122は、電磁弁82,84からの加圧空気の排出により生じる騒音レベルを低減する。空気供給源93からの圧縮空気の圧力は、電磁弁82,84に送られる前に調整器124によって調整される。空気ライン128が電磁弁82,84の入口側で調整後の空気圧力を調整器124から空気入口ポート56,70に供給するよう枝分かれしている。調整器124は、電磁弁82,84の入口側の空気圧力を設定するために用いられる。電磁弁82,84の入口側で調整器124の出口のところの圧力は、空気圧力計126上に表示される。
【0043】
電磁弁82,84は、それぞれのソレノイド101,103を更に有し、これらソレノイドは、それぞれのドライバ又は駆動回路100,102によって電気的に作動されるコイルを備えている。ドライバ100,102は、コントローラ104と連絡関係をなしてこれに結合されており、コントローラ104は、ドライバ100,102に対する独立監視制御を行う。ドライバ100,102は、電気信号をソレノイド101,103にそれぞれ提供する電力スイッチング回路を備えた公知設計のものである。
【0044】
コントローラ
コントローラ104により、ドライバ100は、電気信号を所与の持続時間の電流パルスとして電磁弁82のソレノイド101に供給することができる。電気信号に応答して、ソレノイド101のコイルを通って流れる電流は、電磁弁82の機械弁55に機械的に結合されたアクチュエータの変位を生じさせる磁界を生じさせる。すると、機械弁55は、流路57を開くことによって状態を変え、その結果、第1の通路88は、空気入口ポート56及び流路57によって空気供給源93に結合されるようになる。加圧空気は、空気供給源93から第1の通路88を通って、到達空気圧力によって加圧される閉鎖可変容積部である空気チャンバ92内に流れ、それにより図2のピストン80に上向きの圧力を加える。
【0045】
ソレノイド101のコイルへの電気信号が中断された場合、ばね(図示せず)がアクチュエータ及び機械弁55をアイドル状態に戻すよう用いられる。アイドル状態では、電磁弁82は、電磁弁82の空気出口ポート58が第1の通路88に結合されるよう機械弁55の流路57を切り替える。空気圧力は、空気チャンバ92から第1の通路88、流路57及び空気出口ポート58を通って排気され又は逃がされる。かくして、ソレノイド101は、もし付勢されなければ、空気チャンバ92を空気抜きするよう設定されている。空気圧ピストン80を図2において下方に動かして空気チャンバ92の開放容積を減少させた場合、空気チャンバ92内の空気は、空気出口ポート58を通って逃げ出ることができる。空気チャンバ92は、空気抜きプロセスによって消勢されても良く/或いは空気抜きプロセスによって大気圧の状態又はこれに近い圧力状態(即ち、周囲圧力)に維持されても良い。
【0046】
同様に、コントローラ104により、ドライバ102は、電気信号を所与の持続時間の電流パルスとして電磁弁84のソレノイド103に供給することができる。電気信号に応答して、ソレノイド103のコイルを通って流れる電流は、電磁弁84の機械弁69に機械的に結合されたアクチュエータの変位を生じさせる磁界を生じさせる。すると、機械弁69は、流路71を開くことによって状態を変え、その結果、第2の通路94は、空気入口ポート70及び流路71によって空気供給源93に結合されるようになる。加圧空気は、空気供給源93から第2の通路94を通って、到達空気圧力によって加圧される別の閉鎖可変容積部である空気チャンバ96内に流れ、それにより図2のピストン80に下向きの圧力を加える。
【0047】
ソレノイド103のコイルへの電気信号が中断された場合、ばね(図示せず)がアクチュエータ及び機械弁69をアイドル状態に戻すよう用いられる。アイドル状態では、電磁弁84は、電磁弁84の空気出口ポート72が第2の通路94に結合されるよう機械弁69の流路71を切り替える。空気圧力は、空気チャンバ96から第2の通路94、流路71及び空気出口ポート72を通って排気され又は逃がされる。かくして、ソレノイド103は、もし付勢されなければ、空気チャンバ92を空気抜きするよう設定されている。空気圧ピストン80を図2において上方に動かして空気チャンバ96の開放容積を減少させた場合、空気チャンバ96内の空気は、空気出口ポート72を通って逃げ出ることができる。空気チャンバ96は、空気抜きプロセスによって消勢されても良く且つ/或いは空気抜きプロセスによって大気圧の状態又はこれに近い圧力状態(即ち、周囲圧力)に維持されても良い。
【0048】
機械弁55,69を開閉する電磁弁82,84の動作は、流体モジュール12からの流体材料の射出を制御する射出弁10を開閉するよう協調されるのが良い。具体的に説明すると、空気チャンバ92,96の選択的加圧によって生じる空気ピストン80の運動により、駆動ピン36の先端部34が流体モジュール12の可動要素60の壁62に対して動かされ、それにより材料の液滴を射出するよう弁要素14が弁座52に近づいたりこれから遠ざかったりする。
【0049】
コントローラ104は、1つの制御信号を電磁弁82と関連したドライバ100に送って空気チャンバ92を加圧したり別の別個の制御信号を電磁弁84と関連したドライバ102に送って空気チャンバ96を加圧したりすることができる。以下に説明するように、制御信号のタイミングは、駆動ピン36の速度及びかくして弁要素14が材料の液滴を射出するために弁座52に当たる速度を制御するよう選択されるのが良い。
【0050】
コントローラ104は、1つ又は2つ以上のユーザ入力に基づいて1つ又は2つ以上の変数を制御するよう構成された任意の電気制御装置を有するのが良い。ユーザ入力は、ユーザインタフェース105を介してユーザによって提供でき、ユーザインタフェース105は、例えば、キーボード、マウス及びディスプレイ又はタッチスクリーンであるのが良い。コントローラ104は、マイクロプロセッサ、マイクロコントローラ、マイクロコンピュータ、ディジタル信号プロセッサ、中央処理装置、フィールドプログラマブルゲートアレイ、プログラム可能論理装置、状態機械、論理回路、アナログ回路、ディジタル回路及び/又はメモリ108に記憶されている動作命令に基づいて信号(アナログ及び/又はディジタル)を操作する任意他の装置から選択された少なくとも1つのプロセッサ106を用いて具体化されるのが良い。メモリ108は、単一の記憶装置であっても良く、或いは複数個の記憶装置であっても良く、かかる記憶装置としては、読み取り書き込み記憶装置(RAM)、揮発性メモリ、不揮発性メモリ、静的ランダムアクセスメモリ(SRAM)、動的ランダムアクセスメモリ(DRAM)、フラッシュメモリ、キャッシュメモリ及び/又はディジタル情報を記憶することができる任意他の装置が挙げられるが、これらには限定されない。コントローラ104は、大容量記憶装置110を有し、この大容量記憶装置としては、とりわけ、1つ又は2つ以上のハードディスクドライブ、フロッピー(登録商標)又は他の取り外し可能ディスクドライブ、直接アクセス記憶装置(DASD)、光学ドライブ(例えば、CDドライブ、DVDドライブ等)及び/又は磁気テープ装置が挙げられる。
【0051】
コントローラ104のプロセッサ106は、オペレーティングシステム112の制御下で動作し、種々のコンピュータソフトウェアアプリケーション、コンポーネント、プログラム、オブジェクト、モジュール、データ構造等に具体化されたコンピュータプログラムコードを実行し又はこれを利用する。メモリ108内にあると共に大量記憶装置110に記憶されたコンピュータプログラムコードは、プロセッサ106上での実行時、制御信号を電流パルスとして、電磁弁82,84を駆動するドライバ100,102に提供する制御プログラムコード114を更に含む。コンピュータプログラムコードは、オペレーティングシステムの一部として実行されるにせよ、特定のアプリケーション、コンポーネント、プログラム、オブジェクト、モジュール又は動作シーケンスとして実行されるにせよいずれにせよ、種々の時点でメモリ108内にあり、プロセッサ106により読み取られて実行されると、コントローラ104が本発明の種々の実施形態及び観点を具体化するステップ又は要素を実施するのに必要なステップを実行するようにする1つ又は2つ以上の命令を含む。本発明の実施形態を具体化するために実行されると共に制御システムの1つ又は2つ以上の特殊又は汎用コントローラによって実行されるルーチンを本明細書において「コンピュータプログラムコード」又は単に「プログラムコード」と称する。
【0052】
本明細書において説明する種々のプログラムコードをこれが本発明の特定の実施形態において具体化されるアプリケーションに基づいて識別することができる。しかしながら、理解されるべきこととして、以下の任意特定のプログラム名称集が単に便宜上用いられ、かくして、本発明は、かかる名称集により識別されると共に/或いは示唆される任意特定の用途だけにおける使用に限定されるべきではない。さらに、コンピュータプログラムをルーチン、手順、方法、モジュール、オブジェクト等に編成することができる仕方並びにプログラム機能を代表的なコンピュータ内にある種々のソフトウェア層(例えば、オペレーティングシステム、ライブラリ、API、アプリケーション、アプレット等)に割り当てることができる種々の仕方の数が一般に際限がないほど多いと仮定すると、本発明は、本明細書において説明するプログラム機能の特定の編成及び割り当てには限定されないことが理解されるべきである。
【0053】
当業者であれば理解されるように、本発明の実施形態は、非一過性コンピュータ可読プログラムコードが盛り込まれた少なくとも1つのコンピュータ可読記憶媒体に取り込まれるコンピュータプログラム製品にも具体化できる。コンピュータ可読記憶媒体は、命令実行システム、装置又はデバイスによって使用され又はこれと関連して使用されるプログラムを納め又は格納することができる電子、磁気、光学、電磁気、赤外線又は半導体システム、装置若しくはデバイス又はこれらの任意適当な組み合わせであって良い。例示のコンピュータ可読記憶媒体としては、ハードディスク、フロッピー(登録商標)ディスク、読み取り書き込み記憶装置、読み取り専用記憶装置、消去可能プログラム可能読み取り専用記憶装置、フラッシュメモリ、携帯型コンパクトディスク読み取り専用記憶装置、光学記憶装置、磁気記憶装置又はこれらの任意適当な組み合わせが挙げられるが、これらには限定されない。プロセッサに指示を出してこれが特定の仕方で、本発明の実施形態の動作を実行するよう機能するコンピュータプログラムコードを含む命令を1つ又は2つ以上のオブジェクト指向及び手順プログラミング言語で書き表すことができる。コンピュータプログラムコードは、コンピュータ可読記憶媒体から任意形式のコンピュータのプロセッサ、例えばコントローラ104のプロセッサ106に送ると、指定されているセンサデータ収集のためのコンピュータ実行プロセスの機能/行為を実施するための命令を実行するプロセッサを搭載したマシーンを製作することができる。
【0054】
オーバーラップ時間の制御
図4及び図5は、電磁弁82,84を開いて加圧空気を空気チャンバ92,96に供給するよう電磁弁82,84のそれぞれのソレノイド101,103に駆動電流として供給された電気パルス信号を示している。電磁弁82のソレノイド101が付勢状態にあるとき、電磁弁82は、空気圧力を空気チャンバ92に供給する。電磁弁82のソレノイド101が付勢状態にないとき、電磁弁82は、排気ポート58を介して空気チャンバ92を周囲圧力に向かって空気抜きし又は容積が空気圧ピストン80の運動に起因して変化すると、空気チャンバ92を周囲圧力に維持する。電磁弁84のソレノイド103が付勢状態にあるとき、電磁弁84は、空気圧力を空気チャンバ96に供給する。電磁弁84のソレノイド103が付勢状態にないとき、電磁弁84は、排気ポート72を介して空気チャンバ96を周囲圧力に向かって空気抜きする。
【0055】
図4に示されているように、射出弁10を開くために、電気パルス信号140が時刻t1で電磁弁80のソレノイド101のコイルに供給される。この第1の状態で電気パルス信号140によって付勢されている間、電磁弁82の機械弁55は、空気圧力を調整器124によって定められた圧力で空気チャンバ92に供給することができるよう切り替えられる。空気チャンバ92の加圧により、駆動ピン36及び空気圧ピストン80を第1の方向に動かし又は持ち上げてこれらを流体モジュール12から遠ざける力が生じる。以下に説明するように、これが起こると、ばね又は付勢要素68により、弁要素14は、引っ込んで弁座52から遠ざかる。空気圧ピストン80が第1の方向に持ち上げられても、電磁弁84のソレノイド103は、非付勢状態のままであり、空気チャンバ96は、電磁弁84の排気ポート72に結合される。この第2の状態では、電磁弁84は、第1の方向における空気圧ピストン80の運動により生じた空気圧力を空気チャンバ96から逃がす。
【0056】
駆動ピン36を所望の距離だけ又は所望の持続時間の間上昇させると、電気パルス信号150が時刻t2で電磁弁84のソレノイド103に供給されて電磁弁84の機械弁69を開くと共に空気供給源93からの圧縮空気を空気チャンバ96に供給する。空気チャンバ96の加圧により空気圧ピストン80に加えられる力と圧縮ばね86の力が互いに協働し、それにより駆動ピン36は、流体モジュール12に向かって下方に動き始める。しかしながら、調整器124によって定められた圧力における加圧空気は、空気チャンバ92内に残ったままである。というのは、電磁弁82のソレノイド101が依然として付勢されているからである。時刻t3において、電磁弁82のソレノイド101への電気パルス信号140の供給を中断する。非付勢状態では、電磁弁82の機械弁55は、空気チャンバ92からの空気圧力を排気ポート58経由で逃がして空気チャンバ92を周囲圧力に戻すよう切り替えられる。これにより、駆動ピン36は、迅速に流体モジュール12に向かって動いて流体モジュール12に衝突し、それにより材料の液滴を射出する。時刻t4において、電磁弁84のソレノイド103への電気パルス信号150の供給を中断する。電磁弁84の機械弁69は、そのソレノイド103の非付勢状態では、空気チャンバ96からの空気圧力を排気ポート72経由で逃がして空気チャンバ96を周囲圧力に戻すよう切り替えられる。両方のチャンバ92,96は周囲圧力状態にある場合、ばね86は、図2においてピストン80及び駆動ピン36を押さえつけて弁要素14を常閉位置では弁座52に当てた状態に維持する。
【0057】
電気パルス信号140,150は、各サイクルの全てではなく一部分にわたって、空気チャンバ92,96が同時に加圧されるようオーバーラップ状態にあるよう計時される。空気チャンバ92,96の加圧のためのオーバーラップ期間は、電気パルス信号140,150相互間の時間的一致によって定められる。パルス140について開始時刻t1及び終了時刻t3を調節すると共にパルス150について開始時刻t2及び終了時刻t4を調節することによりオーバーラップ期間を制御することができる。パルス140についての開始時刻t1は、パルス150についての開始時刻t2に先行する。パルス140についての終了時刻t3は、パルス150についての終了時刻t4に先行する。パルス150についての開始時刻t2は、パルス140についての開始時刻t1とパルス140についての終了時刻t3との間で生じるよう順序づけられる。同様に、パルス140についての開始時刻t3は、パルス150についての開始時刻t2とパルス150についての終了時刻t4との間で生じるよう順序づけられる。コントローラ104によって制御されるこれら計時(タイミング)、特にt2,t3の計時は、パルス140,150にオーバーラップを生じさせる。
【0058】
図4及び図5では明らかではないが、パルス140,150は、理想化されており、これらパルスは、当業者には理解されるように立ち上がり時間及び立ち下がり時間を有すると理解される。加うるに、時刻t1〜t4は、いずれも、コントローラ104から送り出されて電磁弁92,94によってほぼ瞬時に受け取られる瞬間的時間を表している。電磁弁82の機械弁55及び電磁弁84の機械弁69は各々、流路57,81の各々をそれぞれ切り替える作動応答時間を有している。
【0059】
図4は、時刻t2と時刻t3との間で測定された電気パルス信号140,150についてのオーバーラップ時間1として示されているオーバーラップ期間を示しており、このオーバーラップ時間1は、比較的長いオーバーラップ時間である。オーバーラップ時間1の持続時間が比較的長いと仮定すると、空気圧ピストン80が射出弁10を閉じるために下方に移動している時間の比較的大きな部分にわたって加圧状態が空気チャンバ96内に存在する。空気チャンバ92内の空気圧力は、空気圧ピストン80の下方運動に対抗し、それにより、駆動ピン36は、比較的遅い速度で動く。一般に、空気圧ピストン80の運動速度は、電気パルス信号140,150相互間の時間的オーバーラップに比例する。オーバーラップが短ければ短いほど、ピストン80は、図2において下方にそれだけ一層速く動き、オーバーラップが長ければ長いほど、ピストンは、下方にそれだけ一層遅く動くことになる。
【0060】
コントローラ104は、第1の電磁弁82を第1の期間にわたり第1の状態に保持するよう動作可能である。電磁弁82は、空気圧力が電気パルス信号140の持続時間にほぼ等しい期間にわたって空気チャンバ92に供給される第1の状態に保持される。電気パルス信号140の持続時間、それゆえ第1の期間は、時刻t1,t2相互間の期間によって定められる。コントローラ104は、第2の電磁弁84を空気圧力が電気パルス信号140の持続時間にほぼ等しい第2の期間にわたって空気チャンバ96に供給される第1の状態に保持するよう動作可能である。電気パルス信号150の持続時間、それゆえ第2の期間は、時刻t2,t4相互間の期間によって定められる。
【0061】
コントローラ104は、第1の期間(即ち、電気パルス信号140の持続時間)と第2の期間(即ち、電気パルス信号150の持続時間)との間に所定のオーバーラップ期間を維持する。駆動ピン36は、第2の期間中、弁座52に向かって動く。オーバーラップ期間は、駆動ピン36が第2の期間中、弁座52に向かって動いているとき、駆動ピン36の速度を制御するために用いられる。第2の期間中における駆動ピン36の運動により、弁要素14は、動いて弁座52に接触し、それにより材料の液滴が射出される。
【0062】
本明細書において説明している好ましい実施形態では、第2の期間中における駆動ピン36の運動により、駆動ピン36は、流体モジュール12に接触する。具体的に説明すると、接触は、上述したように可動要素60の壁62との接触である。駆動ピン36と流体モジュール12が接触することにより、弁要素14が動いて弁座52に接触し、それにより材料の液滴が射出される。
【0063】
図4に示された射出弁10の次のサイクルに関し、電気パルス信号140,150とほぼ同じであり、オーバーラップ時間1を有する電気パルス信号142,152が電磁弁82,84のソレノイド101,103に供給される。連続したサイクルが電気パルス信号140,150及び電気パルス信号142,152と同じオーバーラップ時間1で連続した電気パルス対(図示せず)によって生じ、それにより材料の液滴が順次射出される。
【0064】
図5は、時刻t2とt3との間のパルス信号140,150に関するオーバーラップ時間2によって与えられたオーバーラップ期間を示しており、このオーバーラップ時間2は、オーバーラップ時間1(図4)により与えられたオーバーラップ期間よりも持続時間が短い。図5では、駆動ピン36は、図4の場合よりも高い速度で動くことになる。というのは、空気圧ピストン80は、短い期間の場合、空気チャンバ92内の加圧条件に抗して下方に動くことになるからである。これは、図5では、電磁弁82のソレノイド103を付勢した後、空気チャンバ92が図4の場合よりも迅速に大気圧に向かって空気抜きされるからである。
【0065】
かくして、電磁弁82,84に電力を供給するパルス相互間のオーバーラップ時間を用いると、駆動ピン36及び弁要素14の速度を制御することができる。材料を射出するのに駆動ピン36が速く動かなければならない比較的濃い材料については短いオーバーラップ期間(例えば、オーバーラップ時間2)を利用するのが良い。薄い材料の場合、材料を射出したときに材料がはね散らないようにするためには駆動ピン36は、遅い速度で動かされる必要があり、かくして、長いオーバーラップ期間(例えば、オーバーラップ時間1)を利用するのが良い。
【0066】
図6は、オーバーラップ時間と粘度との相関関係を示すために2つのサンプル点を示している。点Aに関する材料の粘度は、12,500センチポアズ(25℃において)であり、この材料の場合、1ミリ秒のオーバーラップ時間が液滴の良好な射出をもたらすことが実験的に判明した。点Bに関する材料は、60,000センチポアズ(25℃において)の粘度を有する高粘度材料である。この材料の場合、0.25ミリ秒のオーバーラップ時間が良好な射出をもたらすことが実験的に判明した。多くの材料について得ることができるこの種の情報をユーザインタフェースを介して利用可能なルックアップテーブルに記憶させるのが良い。加うるに、このデータを用いると、所与の粘度の値についてオーバーラップ時間を自動的に生じさせる線、曲線又は数学公式を得ることができる。これについて以下に詳細に説明する。
【0067】
材料の粘度は、一般に、ほぼ室温である25℃において製造業者によって与えられるが、材料を射出温度まで加熱してこれら材料を射出する前にこれらの粘度を減少させることが通例であることに注目されたい。かくして、所望ならば、システムは、適当な調節が施された状態で25℃の室温における粘度ではなく、射出温度で粘度を利用するよう構成されても良い。
【0068】
駆動ピン速度制御のためのユーザインタフェース
本発明のこの説明が与えられると共にオーバーラップ時間をどのようにすれば制御できるかが与えられると、コントローラ104は、空気圧ピストン80の運動速度及びかくして弁要素14が材料の液滴を射出するために弁座52に接触するときに弁要素14がピストン80の運動によって動かされる速度を制御するようユーザがコントローラ104によって利用可能な情報を入力することができるようにするキーボード、マウス及びディスプレイを有するのが良い。
【0069】
例えば、ユーザは、射出されるべき材料に関する粘度値を入力することができる。この入力に応答して、コントローラ104内のルックアップテーブルを用いると、実験的に定められたオーバーラップ時間値を粘度値に相関させることができる。次に、このオーバーラップ時間値は、コントローラ104によって使用され、それにより電磁弁82,84を制御してこの材料にとって良好な射出をもたらす駆動ピン速さ又は速度を生じさせることができる。ルックアップテーブルの代替手段として、上述したように、実験データが曲線を辿る場合、曲線当てはめツールを使用することができ、それによりオーバーラップ時間を粘度に相関させる数学方程式を求めることができ、この公式は、コントローラによって利用され、それによりユーザによって入力された粘度値に対応したオーバーラップ期間を生じさせることができる。
【0070】
別の例として、コントローラ104は、材料粘度範囲、例えば高い粘度値に関する範囲、中程度の材料粘度(中粘度)に関する値及び低い材料粘度に関する範囲を表す一連のボタン又はパッドを備えた制御パネル又はタッチスクリーンを利用しても良い。ユーザが中粘度範囲の材料を射出する場合、ユーザは、中粘度ボタンを押すのが良い。この入力に応答して、コントローラ104は、中粘度材料について良好な射出をもたらすよう実験的に求められたオーバーラップ時間を選択する。次に、コントローラ104は、このオーバーラップ時間値を用いて電磁弁82,84を制御し、それにより所望の駆動ピン速度を生じさせる。
【0071】
さらに別の例として、コントローラ104は、ユーザにより射出される種々の材料のデータベースを有しても良い。各材料は、代表的には、射出用材料製造業者により供給されると共に各材料には製造業者による製品名、例えば製品Aが与えられている場合がある。この場合、ユーザが製品Aを用いている場合、ユーザは、コントローラ104により提供されるインタフェース中の適当なスクリーンに進むことができ、そしてドロップダウンリストを用いて製品Aを選択するのが良い。この選択に応答して、コントローラ104は、ルックアップテーブルを使用してその材料に関する実験で求められたオーバーラップ時間値を発見し、このオーバーラップ時間値を用いて電磁弁82,84を制御し、それによりこの材料に望ましい駆動ピン速度を生じさせる。
【0072】
さらに別の例として、コントローラ104は、スライダーバーを備えたインタフェースを有しても良い。ユーザがスライダーバーを一方向に動かすと、コントローラは、オーバーラップ時間を短くして駆動ピン速度を速める。ユーザがスライダーバーを逆方向に動かすと、コントローラ104は、オーバーラップ時間を長くして駆動ピン速度を遅くする。射出試験中、ユーザは、スライダーバーを用いて射出弁の駆動ピン速度を速めたり遅くしたりすることができ、そして射出試験の結果を観察することができる。これらの結果に基づいて、オペレータは、どのようなオーバーラップ時間が射出中の材料にとって最適な結果をもたらすかを経験的に求めることができ、そして製造作業においてこのオーバーラップ期間を用いることができる。ユーザも又、このようにして、ユーザが射出する各材料に関する最適なオーバーラップ時間をその製造作業の際に経験的に求めることによって自分自身のルックアップテーブルを構築することができる。別の変形例では、ユーザは、スライダーバーの位置を初期設定するためにタッチスクリーン上の高粘度、中粘度及び低粘度ボタン又はパッドを利用することができる。この場合、材料が適正に射出されず、これとは異なり、ノズル上に堆積する場合、ユーザは、適正な射出が達成されるまでオーバーラップ時間を短くすると共に駆動ピン速度を増大させるようスライディングスケールを調節するのが良い。これとは逆に、スライダーバーの初期位置により、材料のはね散りが基板上で生じる場合且つ/或いは材料の小さな衛星状液滴が生じる場合、スライダーバーを用いて適正な射出が達成されるまでオーバーラップ時間を長くすると共に駆動ピン速度を減少させるのが良い。次に、良好な射出に関するオーバーラップ時間の読みを記録し、メモリに記憶させ、そして製造作業に用いるのが良い。
【0073】
さらに別の実施形態では、基板上の1つの場所で用いられる1つのオーバーラップ時間/駆動ピン速度で材料の液滴を射出したり材料の別の液滴を射出するために基板上の別の場所で用いられる別のオーバーラップ時間/駆動ピン速度で材料の液滴を射出したりするよう射出弁が基板を横切ってロボットにより動かされている間、オーバーラップ時間及びかくして駆動ピン速度を「オン・ザ・フライ(on the fly)」で変更することができる。
【0074】
本発明がどのように作用するかについての上述の説明が与えられると、これら発明を実施するために多くの発明性のあるシステム及び方法を採用することができる。
【0075】
空気圧射出装置の弁速度を制御するためのユーザインタフェースを備えたシステム
本発明に従って材料を射出する一システムでは、射出装置は、材料の液滴を射出するために弁座に接触し弁要素の運動を生じさせる空気圧ピストンを有し、コントローラは、ユーザが弁要素の速度を変化させることができるようにするユーザインタフェースを有する。
【0076】
別のシステムでは、射出装置は、ピストンの互いに反対側に設けられていて、独立電磁弁によって制御される上側及び下側ピストンチャンバを有し、弁要素の速度は、電磁弁の制御によって制御される。
【0077】
別のシステムでは、電磁弁は、圧縮空気が上側ピストンチャンバと下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間をもたらすよう制御される。
【0078】
弁速度ユーザインタフェースを有する空気圧作動式射出装置からの射出方法
本発明に従って材料を射出する一方法では、射出装置は、弁要素が動いて弁座に接触して材料の液滴を射出するようにする空気圧駆動式ピストンを有し、弁要素の速度を変化させるようコントローラによって用いられる情報をユーザが入力するために使用できるユーザインタフェースが設けられる。
【0079】
別の方法では、ユーザ入力は、射出装置から射出されるべき材料に関連している。
【0080】
別の方法では、ユーザ入力は、材料の粘度に関連している。
【0081】
別の方法では、射出装置は、空気圧作動式であり、この射出装置は、ピストンの互いに反対側に設けられたチャンバに供給される圧縮空気によって往復動するピストンに固定された駆動ピンを有し、駆動ピンの運動により、弁要素が動いて流体チャンバ内の弁座に接触し、それにより流体チャンバと流体連通状態にあるノズルオリフィスから材料の液滴を射出し、弁を、まず最初に、弁要素が弁座に押し付けられた状態の閉鎖位置に維持し、次に、時刻T1では、ピストンの一方の側のチャンバを圧縮空気供給源に連結し、それによりピストン、駆動ピン及び弁要素を引っ込めて弁座から遠ざけて流体材料が弁座内に流れることができるようにし、T1後の時刻T2では、ピストンの反対側のチャンバを圧縮空気供給源に連結してピストン、駆動ピン及び弁要素を弁座に向かって動かし、T2後の時刻T3では、第1のチャンバを圧縮空気供給源から切り離して第1のチャンバ内の圧力を逃がすことができるようにし、そしてT3後の時刻T4では、第2のチャンバを圧縮空気供給源から切り離して第2のチャンバ内の圧力を逃がすことができるようにし、T2,T3相互間の期間は、第1のチャンバと第2のチャンバの両方が圧縮空気供給源に連結されるオーバーラップ期間となり、オーバーラップ期間の持続時間は、駆動ピンが弁座に向かって動いている間に駆動ピンの速度を制御するよう選択される。
【0082】
別の方法では、短い持続時間のオーバーラップ期間が第1の粘度を有する材料を射出するために利用され、長い持続時間のオーバーラップ期間が第2の粘度を有する材料を射出するために利用され、第1の粘度は、第2の粘度よりも低い。
【0083】
別の方法では、ユーザが情報をコントローラに入力するために用いることができるユーザインタフェースが設けられ、コントローラは、ユーザによって入力された情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0084】
別の方法では、ユーザは、材料に関する情報を入力し、コントローラは、ユーザによって入力されたその情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0085】
別の方法では、ユーザは、材料粘度に関する情報を入力し、コントローラは、ユーザによって入力されたその情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0086】
別の方法では、オーバーラップ期間の持続時間を材料の粘度に相関させるデータが格納され、コントローラは、ユーザによって入力された情報及び格納されたデータを利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0087】
別の方法では、ユーザインタフェースのところでユーザから入力された形式の情報をオーバーラップ期間の情報に相関させる数学公式がコントローラに記憶され、この公式は、所望のオーバーラップ期間を生じさせるようユーザにより入力された情報に応答してコントローラによって利用される。
【0088】
別の方法では、ユーザがオーバーラップ期間を短くし、それにより駆動ピン速度を増大させ又はオーバーラップ時間を長くし、それにより駆動ピン速度を減少させることができるようにするスライダーバーがユーザインタフェースに設けられる。
【0089】
別の方法では、材料の特性、例えば粘度範囲に対応したボタン又はタッチパッドがユーザインタフェースに設けられる。すると、ユーザは、ボタン又はタッチパッドを用いて射出されるべき材料に最も適した範囲を選択し、コントローラは、メモリから、その粘度範囲で最も良く働くよう経験的に求められたオーバーラップ時間を検索により取り出し、そしてこのオーバーラップ期間を用いて材料を射出させる。
【0090】
別の方法では、ユーザは、ボタン又はタッチパッドを用いて、この場合、射出されるべき材料に最も適した範囲を選択し、コントローラは、メモリから、その粘度範囲で最も良く働くよう経験的に求められたオーバーラップ時間を検索により取り出し、スライダーバーを設定してそのオーバーラップ時間を用い、それにより材料を射出させる。この場合、ユーザは、スライダーバーを用いて駆動ピン速度を速めたり遅くしたりし、そして材料にとって最適な射出をもたらす駆動ピン速度/オーバーラップ時間を記録することによってより最適なオーバーラップ時間を探し求める。次に、駆動ピン速度/オーバーラップ時間値を製造作業において利用する。
【0091】
例えば「垂直」、「水平」等のような本明細書における記載は、基準系を定めるために例示として行われており、本発明を限定するものではない。当業者であれば理解されるように、本発明の実施形態を説明する目的で種々の他の基準系を用いることができ、これは均等範囲に属する。
【0092】
理解されるように、或る要素が別の要素に「取り付けられ」、「連結され」、又は「結合され」ていると説明されている場合、この要素は、他の要素に直接連結され又は結合されても良く、これとは異なり、1つ又は2つ以上の介在要素が存在しても良い。これとは対照的に、或る要素が別の要素に「直接取り付けられ」、「直接連結され」、又は「直接結合され」ていると説明されている場合、介在する要素は存在しない。或る要素が別の要素に「間接的に取り付けられ」、「間接的に連結され」、又は「間接的に結合され」ていると説明されている場合、少なくとも1つの介在要素が存在している。
【0093】
本明細書で用いられている用語は、特定の実施形態を説明する目的のために過ぎず、本発明を限定するものではない。原文明細書において用いられている単数形“a”、“an”及び“the”は、文脈上明示の別段の指定がなければ、複数をも含む。さらに理解されるように、“comprises ”及び/又は“comprising”という用語が原文明細書において用いられている場合、言明した特徴、整数、ステップ、動作、要素及び/又はコンポーネントの存在を指定しているが、1つ又は2つ以上の他の特徴、整数、ステップ、動作、要素、コンポーネント及び/又はこれらの群の存在又は追加を排除するものではない。さらに、“includes”、“having”、“has”、“with”、“composing”又はこれらの変形語が原文明細書の詳細な説明又は原文特許請求の範囲に用いられている場合、かかる用語は、非限定的用語“comprising”とほぼ同様に包括的であるものとみなされる。
【0094】
本発明を種々の実施形態の説明によって説明すると共にこれら実施形態をかなり詳細に説明したが、添付の特許請求の範囲に記載された本発明の範囲をかかる詳細に制限し又は何らかの仕方で限定することは、本出願人の意図ではない。追加の利点及び改造例が当業者には容易に明らかであろう。かくして、それゆえに、本発明はその広い観点において特定の細部、代表的な装置及び方法並びに図示すると共に説明した例示には限定されない。したがって、本出願人の全体的な発明の技術的思想の精神又は範囲から逸脱することなく、かかる細部の変形例を案出することができる。
【符号の説明】
【0095】
10 射出弁又はジェッティングバルブ
12 流体モジュール
14 弁要素
16 電空式アクチュエータ
18 外側カバー
20 流体インタフェース
22 注入器又はシリンジ
28 ノズル
30 モジュール本体
32 第3の区分又は部分
36 駆動ピン
38 流体チャンバ
40 第1の区分又は部分
45 第2の区分又は部分
63 インサート
76 ヒータ
80 空気圧ピストン
82,84 電磁弁
90 ピストンハウジング
92 空気ピストンチャンバ
104 コントローラ
【技術分野】
【0001】
本発明は、一般に、流体材料の射出又は噴出に関し、特に、電空式射出弁(ジェッティングバルブ)、射出システム及び改良型射出方法に関する。
【0002】
〔関連出願の説明〕
本願は、本願と同日に出願された米国特許出願(現時点では、出願番号未付与)(発明の名称:“MODULAR JETTING DEVICES”)(代理人事件番号:NOR‐1414US)に関連しており、この米国特許出願を参照により引用し、その記載内容全体を本明細書の一部とする。
【背景技術】
【0003】
射出弁は、電子包装組立てにおいて、基板上に流体材料の微小な点状体又はドットを射出するために用いられている。流体材料、例えばアンダーフィル(余盛不足)用材料、封入用材料、表面実装接着剤、はんだペースト、導電性接着剤並びにはんだマスク材料、はんだフラックス及び熱的配合物を射出する射出弁について多くの用途がある。流体材料の種類が変わると、射出弁は、流体材料の変化にマッチするよう適合されなければならない。「射出弁(ジェッティングバルブ)」又は「射出装置」は、ディスペンサからの材料の液滴を噴出し又は「射出」して基板上に着地させる装置であり、この場合、液滴は、ディスペンサノズルから離れ、その後基板に接触する。かくして、射出型ディスペンサでは、小出しされた液滴は、ディスペンサと基板との間では「飛行中(in-flight )」であり、ディスペンサと基板との間の距離の少なくとも一部に関し、ディスペンサにも基板にも接触していない。
【0004】
射出弁によって射出することができる材料は、種々の特性、例えば粘度、弾性等を有する場合がある。特性が変化すると、射出弁からの適正な射出を促進するために種々のニードル速度が必要である。ニードル速度は、射出された流体材料の重要な特性、例えば離脱、点状体速度及び衛星状発生(satellite generation)に影響を及ぼす。
【0005】
射出弁は、ニードルが弁座に当たったときに流体材料を射出するために用いられるニードルを動かす空気圧ピストンを用いて電空式(電気空気圧式)に作動されるのが良い。電空式射出弁の従来設計では、単一の電磁弁が空気圧力を空気圧ピストンにもたらして射出弁を開くよう用いられ、戻しばねが材料の液滴を射出するのに十分に速い速度で射出弁を閉じるために用いられる。その結果、ニードル又は駆動ピンの速度は、極めて可変であるわけではなく、一般に、比較的狭い範囲内に留まっている。ニードル速度が比較的狭い範囲に制限されていると仮定すると、かかる射出装置では射出可能な材料の粘度範囲も同様に制限される。
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来型射出弁は、或る特定の用途に適していることが判明しているが、種々の流体材料特性に適合する高い性能を備えた改良型射出弁が要望されている。
【課題を解決するための手段】
【0007】
駆動ピン速度を制御するオーバーラップ期間を備えた空気圧射出弁
一実施形態では、流体材料供給源及び空気圧供給源用の射出弁が提供される。射出弁は、空気圧ピストン及び空気圧ピストンから延びる駆動ピンを備えた空気圧アクチュエータを有する。射出弁は、第1のチャンバ及び第2のチャンバを備えたハウジングを更に有する。第1及び第2の電磁弁が空気圧供給源に連結されている。第1の電磁弁は、空気圧ピストン及び駆動ピンを第1の方向に動かすために第1の力を空気圧ピストンに加えるよう空気圧力が第1のチャンバに供給される第1の状態を有する。第1の電磁弁は、第1の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有する。第2の電磁弁は、空気圧ピストン及び駆動ピンを第2の方向に動かすために第2の力を空気圧ピストンに加えるよう空気圧力が第2のチャンバに供給される第1の状態を有する。第2の電磁弁は、第2の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有する。
【0008】
射出弁は、流体チャンバ及びノズルを更に有するのが良い。流体チャンバは、弁座及び弁要素を収納するのが良い。ノズルは、小出しオリフィス及び弁座と流体連通状態にある流れ通路を有する。弁要素は、小出しオリフィスから材料の液滴を射出するよう弁座と接触関係をなす位置まで動くことができる。
【0009】
射出弁のコントローラが第1の電磁弁を第1の期間にわたり第1の状態に保持し、第2の電磁弁を第2の期間にわたり第1の状態に保持するよう動作可能であり、第2の期間の開始は、第1の期間の開始に続く。駆動ピンは、第2の期間中、弁座に向かって動かされ、第2の期間中における駆動ピンのこの運動により、弁要素が動いて弁座に接触し、それにより材料の液滴が射出される。コントローラは、第1の期間と第2の期間との間に所定のオーバーラップ期間を維持する。オーバーラップ期間は、駆動ピンが第2の期間中、弁座に向かって動かされているときに駆動ピンの速度を制御するために用いられ、それにより、弁要素が弁座と接触するときの弁要素の速度が制御される。駆動ピンの運動が速ければ速いほど、弁要素の運動はそれだけ一層速くなる。
【0010】
射出弁は、流体チャンバを収容した流体モジュールを更に有するのが良い。第2の期間中における駆動ピンの運動により、駆動ピンは、流体モジュールに接触し、駆動ピンと流体モジュールの接触により、弁要素が動いて弁座に接触する。射出弁は、流体モジュール内に弾性部材を更に有するのが良く、弾性部材は、弁要素を付勢してこれを弁座から離すよう構成されている。
【0011】
射出弁のハウジングは、ばね付勢力を空気圧ピストンに及ぼすばねを収容するのが良い。ばねは、空気圧ピストンが第1のチャンバに供給された圧縮空気によって第1の方向に動かされるときに圧縮されるのが良く、ばねは、空気圧ピストンが第2のチャンバに供給された圧縮空気によって第2の方向に動かされるときに拡張されるのが良い。
【0012】
射出弁の弁要素を動かして弁座に接触させるたびに、ノズルオリフィスを通って材料の液滴を射出することができる。
【0013】
空気圧射出装置の弁速度を制御するためのユーザインタフェースを備えたシステム
別の実施形態では、材料を射出するシステムであって、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧ピストンを備えた空気圧射出装置及びユーザが弁要素の速度を変えることができるようにするユーザインタフェースを備えたコントローラを有する材料射出システムが提供される。
【0014】
射出装置は、ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、上側及び下側ピストンチャンバは、独立電磁弁によって制御され、弁要素の速度は、電磁弁の制御によって制御される。
【0015】
別の実施形態では、電磁弁は、弁要素の速度を制御するために圧縮空気が上側ピストンチャンバと下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供するよう制御される。
【0016】
弁速度ユーザインタフェースを有する空気圧作動式射出装置からの射出方法
一方法では、射出装置は、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧駆動式ピストンを有し、ユーザが弁要素の速度を変化させるためにコントローラによって用いられる情報を入力するために用いることができるユーザインタフェースが設けられる。
【0017】
射出装置は、ピストンと互いに反対側に上側ピストンチャンバ及び下側ピストンチャンバを有するのが良く、これらピストンチャンバは、独立電磁弁によって制御され、弁要素の速度は、電磁弁の制御によって制御される。
【0018】
種々の他の方法が以下において説明されるが、かかる説明は、不必要な反復を回避するために本明細書では繰り返されない。
【0019】
本明細書に組み込まれたその一部をなす添付の図面は、本発明の例示の実施形態を示しており、上述の本発明の実施形態の概要説明及び以下に与えられる詳細な説明と一緒になって、本発明の実施形態の原理を説明するのに役立つ。
【図面の簡単な説明】
【0020】
【図1A】本発明の実施形態としての射出弁の斜視図である。
【図1B】図1Aに類似した斜視図であり、モジュール式射出装置の外側ハウジングが説明の目的上、省かれている図である。
【図2】図1Bの全体として2‐2線に沿って取った断面図であり、ヒータ、流体モジュール及びピストンハウジング並びに圧縮空気をピストンチャンバに供給するコンポーネントを表した機能ブロックだけを示す図である。
【図3】図1及び図2の射出弁の油圧回路の略図である。
【図4】本発明の実施形態としての図1〜図3の電空式射出弁を作動させるために用いられる電磁弁のための制御信号の略図である。
【図5】図4に類似した略図であり、空気圧力が空気チャンバに及ぼされるオーバーラップ時間を図4と比較して減少させるよう電磁弁のための制御信号のタイミングが変更されている状態を示す図である。
【図6】オーバーラップ時間と粘度との関係を表すグラフ図である。
【発明を実施するための形態】
【0021】
以下の幾つかの項において、本発明の種々の実施形態、特徴及びコンポーネントのうちの幾つかへの読者の手引きを助けるために副表題が設けられている。
【0022】
一般に、本発明の実施形態は、電空式アクチュエータの空気圧ピストンを作動させるために第1及び第2の電磁弁を用いた射出弁に関し、この電空式アクチュエータは、射出弁の開閉のための弁要素の運動を促進する。独立空気ラインが空気圧ピストンの頂部及び底部チャンバに結合されている。第1及び第2の電磁弁は、空気圧ピストンの頂部及び底部チャンバに供給される空気圧力を独立制御する。第1の電磁弁は、射出弁を開くために用いられ、第2の電磁弁は、射出弁を閉じるために用いられる。電磁弁を開閉させるピストンに固定されたニードルの速度を変化させるには、圧縮空気を頂部ピストンチャンバに供給する際の第2の電磁弁の作用が圧縮空気を底部ピストンチャンバに供給する際の第1の電磁弁の作用とオーバーラップする時間の長さを変えるのが良い。これら第1及び第2の電磁弁を制御する電気パルスのオーバーラップの量を制御することによって、オペレータは、ニードル速度を制御することができ、それにより射出中の流体材料に最適なニードル速度をその流体材料特性に基づいて選択し又は生じさせることができる。
【0023】
図1A〜図3を参照すると、本発明の実施形態によれば、射出弁又はジェッティングバルブ10は、流体モジュール12を有し、この流体モジュールは、弁要素14、電空式アクチュエータ16、外側カバー18及び流体インタフェース20を有している。外側カバー18は、薄板金で構成され、この外側カバーは、従来型締結具によって射出弁10の内部フレーム構造に締結されている。射出弁10は、付属物として外側カバー18に取り付けられたシリンジホルダ26を有している。シリンジ22がシリンジホルダ26により支持され、射出弁10にはシリンジ22から加圧流体材料が供給される。一般に、流体材料は、当業者によって知られている射出しやすい任意の材料又は物質であって良く、かかる流体材料としては、はんだフラックス、はんだペースト、接着剤、はんだマスク、熱的配合物、油、封入剤、注封(ポッティング)配合物、インキ及びシリコーンが挙げられるがこれらには限定されない。シリンジ22内の流体材料がなくなり又は交換されると、シリンジ22は、シリンジホルダ26から取り外されて交換される。
【0024】
射出弁10は、例えば流体材料を小分けして点状体又はドットとして基板、例えばプリント回路板上に間欠的に射出する機械又はシステム(図示せず)内のロボットに取り付けられるのが良い。射出弁10は、流体材料の一連の射出量が互いに間隔を置いた点状体の線として基板上に付着されるよう作動されるのが良い。射出弁10の標的としての基板は、種々の表面実装部品を支持するのが良く、このためには、微少量の流体材料を迅速に射出すること及び基板上の標的場所に流体材料を付着させる上で正確な配置構成が必要である。
【0025】
流体モジュール
図2において最も良く見えるように、流体モジュール12は、ノズル28、モジュール本体30及び流体結合インタフェース20と連通状態にある流体チャンバ38を有するのが良い。モジュール本体30の第1の区分又は部分40は、流体インタフェース20を通路47,47a(後で説明する)を介して流体チャンバ38と流体連通関係をなすようこれに結合する流体通路42を有している。流体導管44(図1B)が流体モジュール12をシリンジ22の中に入っている流体材料と流体連通関係に配置すると共に流体材料を圧力下でシリンジ22から流体結合インタフェース20に供給するためにシリンジ22から流体インタフェース20まで延びている。この実施形態では、流体導管44は、代表的には、シリンジ22の出口を流体結合インタフェース20に直接結合する1本の管であり、これらの間には介在する構造がなんら存在しない。一実施形態では、流体結合インタフェース20は、ルアー(Luer)継手を含む。
【0026】
シリンジ22は、加圧空気を用いて流体材料が流体インタフェース20の方へ流れるようにし、最終的に流体モジュール12の流体チャンバ38に流れるようにするよう構成されているのが良い。シリンジ22の中に入っている流体材料の上方のヘッドスペースに供給される加圧空気の圧力は、40psig〜60psigであるのが良い。代表的には、ワイパ又はプランジャ(図示せず)がヘッドスペース内の空気圧力とシリンジ22内の流体材料レベルとの間に配置され、密封キャップ(図示せず)が空気圧力を供給するためにシリンジバレルの開口端に固定されている。
【0027】
モジュール本体30の第2の区分又は部分45は、ノズル28を支持するよう構成されている。弁座52が流体出口42と流体チャンバ38との間に設けられている。弁座52は、流体出口42と流体連通状態にある開口部54を有している。
【0028】
流体モジュール12は、可動要素60の壁62の形態をした受板を更に有するのが良い。可動要素60の周囲に接触する付勢要素68が軸方向ばね力を可動要素60に加えるよう構成されている。
【0029】
密封リング64がインサート63と可動要素60の外部との間に密封係合をもたらす。密封リング又はOリング64の下に位置する可動要素60の部分は、流体チャンバ38の境界部の一部を構成する。弁要素14は、可動要素60に取り付けられており、この弁要素は、可動要素60の壁62と弁座52との間の場所で流体チャンバ38の内部に配置されている。変形例として、弁要素14及び可動要素60は、2つの別々の要素ではなく、単一一体の要素として構成されても良い。
【0030】
モジュール本体の第2の区分又は部分32は、摩擦嵌めによってインサート63の頂部に取り付けられている。モジュール本体の第2の部分45は、流体モジュールの他の全てのコンポーネントを包囲するよう摩擦嵌めによりモジュール本体の第1の部分40に取り付けられている。すなわち、第1の部分40と第2の部分45をいったん互いに押し付けると、これら部分は、流体モジュールのこれらの部分、即ち、ノズル28、弁座52、弁要素14、可動要素60、密封リング64、付勢要素68、インサート63及びモジュール本体の第3の部分32を包囲する。かくして、好ましい実施形態では、流体モジュールは、要素45,40,28,52,14,60,64,68,63,32で構成されている。摩擦嵌めの使用の代替手段として、ねじ結合を用いてこれらコンポーネントを容易に分解することができるようにしても良い。
【0031】
上述すると共に図2に示された組立て位置では、流体通路42を流体チャンバ38と流体連通関係をなすようこれに結合する通路47,47aは、次のように設けられる。環状通路47aは、モジュール本体30の第1の部分40と第3の部分32との間に設けられた空間によって作られる。通路47は、インサート63の外部に形成された溝又はチャネルにより提供される。インサート63をモジュール本体30の第2の部分45の中に圧力嵌めすると、インサート63の外部の溝及び第2の部分の内面は、通路47を形成する。インサート63を第2の部分45内に圧力嵌めするのではなく、第2の部分45にねじ込む場合、流体通路42から流体チャンバ38までの流路をもたらすためにインサート63を穴あけして流体通路を設けるのが良い。
【0032】
シリンジ
上述したように、流体導管44(図1)が流体モジュール12をシリンジ22の中に入っている流体材料と流体連通関係に配置すると共に流体材料を圧力下でシリンジ22から流体結合インタフェース20に供給するためにシリンジ22から流体インタフェース20まで延びている。流体導管44は、シリンジ22と流体結合インタフェース20を直接結合する1本の管であるのが良く、これらの間には介在する構造がなんら存在しない。流体材料は、通路42を通って流体チャンバ38に送られ、流体材料が射出弁10によって小出しされると、シリンジ22から到達した流体材料は、流体チャンバ38内の流体材料量を補充する。
【0033】
シリンジ22は、加圧空気を用いて流体材料を通路42に差し向け、最終的に流体モジュール12に設けられた通路47を通って流体チャンバ38に差し向けるよう構成されている。シリンジ22の中に入っている流体材料の上方のヘッドスペース内に設けられたワイパ又はプランジャ(図示せず)によって封じ込められる加圧空気は、5psig〜60psigの状態にあるのが良い。
【0034】
駆動ピン
駆動ピン36は、流体モジュール12と協働して射出弁10から流体材料を射出するよう弁要素14に間接的に結合されている。駆動ピン36の先端部34は、ハンマのように動作してその衝撃の際にその運動量を可動要素60の壁62に伝える。弁要素14は、駆動ピン36の先端部34から見て可動要素60の壁62の反対側で流体チャンバ38内に設けられている。作動された駆動ピン36の先端部34が可動要素60の壁62に衝突することにより、弁要素14は、弁座52に衝突し、そして流体材料を流体チャンバ38から射出する。駆動ピン36は、壁62に当たる際に駆動ピン36の運動が速ければ速いほど、弁要素がそれだけ一層迅速に動いて弁座52に衝突して材料の液滴を射出する。それゆえ、駆動ピン36の速度を上述した仕方で制御することによって、弁要素14の速度も又制御される。上述したように、付勢要素68は、軸方向ばね力を可動要素60に加えるよう可動要素60と接触状態にある。駆動ピン36が壁62を押し下げていないとき、弁要素14及び可動要素60は、付勢要素68によって加えられる軸方向ばね力によって弁座52から遠ざけられる。上述したように、可動要素60及び弁要素14は、2つの別々の部品ではなく、単一一体型部品として構成されても良い。
【0035】
ヒータ
伝熱部材として働く本体80を有するヒータ76が流体モジュール12を少なくとも部分的に包囲している。ヒータ76は、従来型発熱体(図示せず)、例えば本体80に設けられたボア内に位置するカートリッジ型抵抗発熱体を有するのが良い。ヒータ76は、ヒータ76に供給される電力を調整する際に温度コントローラによる使用のためのヒートバック信号をもたらす従来型温度センサ(図示せず)、例えば抵抗型感熱装置(RTD)、サーミスタ又は熱電対を更に備えるのが良い。ヒータ76は、ばね押しピン79を有し、これらばね押しピンは、温度センサのための信号経路を提供すると共に電力を発熱体及び温度センサに送るための電流経路を提供するためにピストンハウジング90内に設けられたそれぞれの接点59に接触する。
【0036】
図2で最も良く理解されるように、流体モジュール12は、ヒータ76内に嵌まり込んでいる。図1Aを参照すると、アーム91a,91bはヒータ76の穴78内に受け入れられた下端部を有し、これら下端部は、アーム91a,91bに設けられたスロット(図示せず)内に受け入れられているばね押しクリップ77によってヒータ76内に解除可能に固定されている。ノブ250を回すと、ノブ250に固定されているボルト260がアーム91a,91bに固定されているねじ山付きカラー270内で回転する。かくして、ノブ250は、ヒータ76及び流体モジュール12をピストン本体90に圧縮状態で接触させるまで回される。
【0037】
流体モジュール12及びヒータ76を取り外すためには、ノブ250を逆方向に回して流体モジュール12及びヒータ76を下降させてこれらをピストン本体90から離す。次に、ばね押しクリップ77を押し下げてクリップをアーム91a,91bのスロットから引き出し、その結果、流体モジュール12及びヒータ76を射出弁10から取り外すことができるようにする。流体モジュール12及びヒータ76を再び取り付けるには、アーム91a,91bの下端部をヒータ76の穴78内に挿入し、ついには、ラッチ77がアーム91a,91bのスロット内にスナップ動作で嵌まり込むようにする。次に、ノブ250をヒータ76及び流体モジュール12がピストン本体90に接触するまで回す。
【0038】
独立電磁弁を備えた互いに反対側に位置するピストン空気チャンバ
図2及び図3を参照すると、射出弁10の電空式アクチュエータ16は、駆動ピン36及び駆動ピン36の一端部に取り付けられた空気圧ピストン80を有している。1対の空気ピストンチャンバ92,96が射出弁10のピストンハウジング90内に形成され、これら空気ピストンチャンバは、空気圧ピストン80によって互いに分離されている。空気チャンバ92,96の各々の容積は、空気圧ピストン80の位置に応じて変化することができる。圧縮ばね86がばねリテーナ118と空気圧ピストン80との間に捕捉されている。圧縮ばね86により加えられる力は、空気圧ピストン80及び駆動ピン36に作用して駆動ピン36を可動要素60の壁62の方へ付勢する閉鎖力として働く。かくして、ピストンチャンバ92,96の両方を大気に空気抜きすると、ばね86は、駆動ピン36を壁62に押し付け、それにより、弁要素14が弁座52に押し付けられ、それにより射出弁10が常閉位置に維持される。
【0039】
射出弁10は、電磁弁82,84を有し、電磁弁82,84は、空気供給源93から空気チャンバ92,96への空気圧力の流れを制御するために用いられる電気機械式装置である。空気チャンバ92は、空気圧ピストン80の一方の側に設けられ、空気チャンバ96は、空気チャンバ92から見て空気圧ピストン80の反対側に設けられている。空気圧ピストン80が空気チャンバ92,96の選択的加圧に応答して動くと、空気チャンバ92,96の各々の容積が変化することになる。
【0040】
第1の電磁弁82は、射出弁10のハウジング90を貫通した第1の通路88によって空気圧ピストン80の一方の側の空気チャンバ92に結合されている。図3に示されているように、第1の電磁弁82は、空気入口ポート56、空気出口又は排気ポート58及び空気入口ポート56か空気出口ポート58かのいずれかに結合するよう切り替え可能な流路57を備えた機械弁55を含む。第1の電磁弁82は、空気圧力を空気供給源93から空気入口ポート56及び第1の通路88から空気チャンバ92に送るか空気圧力を第1の通路88及び空気出口ポート58を通って空気チャンバ92から逃がすかのいずれかを行うよう構成されている。空気チャンバ92を加圧する空気圧力は、空気チャンバ92と境界部を共有する空気圧ピストン80の表面領域に作用して力を空気圧ピストン80及び空気圧ピストン80に連結された駆動ピン36に加えて駆動ピン36を流体モジュール12から遠ざかる方向に動かす。
【0041】
第2の電磁弁84は、射出弁10のハウジング90を貫通した第2の通路94によって空気チャンバ96に結合されている。第2の電磁弁84は、空気入口ポート70、空気出口又は排気ポート72及び空気入口ポート70か空気出口ポート72かのいずれかに結合するよう切り替え可能な流路71を備えた機械弁69を含む。第2の電磁弁84は、空気圧力を空気供給源93から空気入口ポート70及び第2の通路94から空気チャンバ96に送るか空気圧力を第2の通路94及び空気出口ポート72を通って空気チャンバ96から逃がすかのいずれかを行うよう構成されている。空気チャンバ96を加圧する空気圧力は、空気チャンバ96と境界部を共有する空気圧ピストン80の表面領域に作用して、空気チャンバ92内の空気圧力によって加えられる力とは方向が逆の力を空気圧ピストン80及び空気圧ピストン80に連結された駆動ピン36に加えて駆動ピン36を流体モジュール12に近づける方向に動かす。
【0042】
電磁弁82の排気部は、消音器120を備え、電磁弁84の排気部も又、消音器122を備えている。消音器120,122は、電磁弁82,84からの加圧空気の排出により生じる騒音レベルを低減する。空気供給源93からの圧縮空気の圧力は、電磁弁82,84に送られる前に調整器124によって調整される。空気ライン128が電磁弁82,84の入口側で調整後の空気圧力を調整器124から空気入口ポート56,70に供給するよう枝分かれしている。調整器124は、電磁弁82,84の入口側の空気圧力を設定するために用いられる。電磁弁82,84の入口側で調整器124の出口のところの圧力は、空気圧力計126上に表示される。
【0043】
電磁弁82,84は、それぞれのソレノイド101,103を更に有し、これらソレノイドは、それぞれのドライバ又は駆動回路100,102によって電気的に作動されるコイルを備えている。ドライバ100,102は、コントローラ104と連絡関係をなしてこれに結合されており、コントローラ104は、ドライバ100,102に対する独立監視制御を行う。ドライバ100,102は、電気信号をソレノイド101,103にそれぞれ提供する電力スイッチング回路を備えた公知設計のものである。
【0044】
コントローラ
コントローラ104により、ドライバ100は、電気信号を所与の持続時間の電流パルスとして電磁弁82のソレノイド101に供給することができる。電気信号に応答して、ソレノイド101のコイルを通って流れる電流は、電磁弁82の機械弁55に機械的に結合されたアクチュエータの変位を生じさせる磁界を生じさせる。すると、機械弁55は、流路57を開くことによって状態を変え、その結果、第1の通路88は、空気入口ポート56及び流路57によって空気供給源93に結合されるようになる。加圧空気は、空気供給源93から第1の通路88を通って、到達空気圧力によって加圧される閉鎖可変容積部である空気チャンバ92内に流れ、それにより図2のピストン80に上向きの圧力を加える。
【0045】
ソレノイド101のコイルへの電気信号が中断された場合、ばね(図示せず)がアクチュエータ及び機械弁55をアイドル状態に戻すよう用いられる。アイドル状態では、電磁弁82は、電磁弁82の空気出口ポート58が第1の通路88に結合されるよう機械弁55の流路57を切り替える。空気圧力は、空気チャンバ92から第1の通路88、流路57及び空気出口ポート58を通って排気され又は逃がされる。かくして、ソレノイド101は、もし付勢されなければ、空気チャンバ92を空気抜きするよう設定されている。空気圧ピストン80を図2において下方に動かして空気チャンバ92の開放容積を減少させた場合、空気チャンバ92内の空気は、空気出口ポート58を通って逃げ出ることができる。空気チャンバ92は、空気抜きプロセスによって消勢されても良く/或いは空気抜きプロセスによって大気圧の状態又はこれに近い圧力状態(即ち、周囲圧力)に維持されても良い。
【0046】
同様に、コントローラ104により、ドライバ102は、電気信号を所与の持続時間の電流パルスとして電磁弁84のソレノイド103に供給することができる。電気信号に応答して、ソレノイド103のコイルを通って流れる電流は、電磁弁84の機械弁69に機械的に結合されたアクチュエータの変位を生じさせる磁界を生じさせる。すると、機械弁69は、流路71を開くことによって状態を変え、その結果、第2の通路94は、空気入口ポート70及び流路71によって空気供給源93に結合されるようになる。加圧空気は、空気供給源93から第2の通路94を通って、到達空気圧力によって加圧される別の閉鎖可変容積部である空気チャンバ96内に流れ、それにより図2のピストン80に下向きの圧力を加える。
【0047】
ソレノイド103のコイルへの電気信号が中断された場合、ばね(図示せず)がアクチュエータ及び機械弁69をアイドル状態に戻すよう用いられる。アイドル状態では、電磁弁84は、電磁弁84の空気出口ポート72が第2の通路94に結合されるよう機械弁69の流路71を切り替える。空気圧力は、空気チャンバ96から第2の通路94、流路71及び空気出口ポート72を通って排気され又は逃がされる。かくして、ソレノイド103は、もし付勢されなければ、空気チャンバ92を空気抜きするよう設定されている。空気圧ピストン80を図2において上方に動かして空気チャンバ96の開放容積を減少させた場合、空気チャンバ96内の空気は、空気出口ポート72を通って逃げ出ることができる。空気チャンバ96は、空気抜きプロセスによって消勢されても良く且つ/或いは空気抜きプロセスによって大気圧の状態又はこれに近い圧力状態(即ち、周囲圧力)に維持されても良い。
【0048】
機械弁55,69を開閉する電磁弁82,84の動作は、流体モジュール12からの流体材料の射出を制御する射出弁10を開閉するよう協調されるのが良い。具体的に説明すると、空気チャンバ92,96の選択的加圧によって生じる空気ピストン80の運動により、駆動ピン36の先端部34が流体モジュール12の可動要素60の壁62に対して動かされ、それにより材料の液滴を射出するよう弁要素14が弁座52に近づいたりこれから遠ざかったりする。
【0049】
コントローラ104は、1つの制御信号を電磁弁82と関連したドライバ100に送って空気チャンバ92を加圧したり別の別個の制御信号を電磁弁84と関連したドライバ102に送って空気チャンバ96を加圧したりすることができる。以下に説明するように、制御信号のタイミングは、駆動ピン36の速度及びかくして弁要素14が材料の液滴を射出するために弁座52に当たる速度を制御するよう選択されるのが良い。
【0050】
コントローラ104は、1つ又は2つ以上のユーザ入力に基づいて1つ又は2つ以上の変数を制御するよう構成された任意の電気制御装置を有するのが良い。ユーザ入力は、ユーザインタフェース105を介してユーザによって提供でき、ユーザインタフェース105は、例えば、キーボード、マウス及びディスプレイ又はタッチスクリーンであるのが良い。コントローラ104は、マイクロプロセッサ、マイクロコントローラ、マイクロコンピュータ、ディジタル信号プロセッサ、中央処理装置、フィールドプログラマブルゲートアレイ、プログラム可能論理装置、状態機械、論理回路、アナログ回路、ディジタル回路及び/又はメモリ108に記憶されている動作命令に基づいて信号(アナログ及び/又はディジタル)を操作する任意他の装置から選択された少なくとも1つのプロセッサ106を用いて具体化されるのが良い。メモリ108は、単一の記憶装置であっても良く、或いは複数個の記憶装置であっても良く、かかる記憶装置としては、読み取り書き込み記憶装置(RAM)、揮発性メモリ、不揮発性メモリ、静的ランダムアクセスメモリ(SRAM)、動的ランダムアクセスメモリ(DRAM)、フラッシュメモリ、キャッシュメモリ及び/又はディジタル情報を記憶することができる任意他の装置が挙げられるが、これらには限定されない。コントローラ104は、大容量記憶装置110を有し、この大容量記憶装置としては、とりわけ、1つ又は2つ以上のハードディスクドライブ、フロッピー(登録商標)又は他の取り外し可能ディスクドライブ、直接アクセス記憶装置(DASD)、光学ドライブ(例えば、CDドライブ、DVDドライブ等)及び/又は磁気テープ装置が挙げられる。
【0051】
コントローラ104のプロセッサ106は、オペレーティングシステム112の制御下で動作し、種々のコンピュータソフトウェアアプリケーション、コンポーネント、プログラム、オブジェクト、モジュール、データ構造等に具体化されたコンピュータプログラムコードを実行し又はこれを利用する。メモリ108内にあると共に大量記憶装置110に記憶されたコンピュータプログラムコードは、プロセッサ106上での実行時、制御信号を電流パルスとして、電磁弁82,84を駆動するドライバ100,102に提供する制御プログラムコード114を更に含む。コンピュータプログラムコードは、オペレーティングシステムの一部として実行されるにせよ、特定のアプリケーション、コンポーネント、プログラム、オブジェクト、モジュール又は動作シーケンスとして実行されるにせよいずれにせよ、種々の時点でメモリ108内にあり、プロセッサ106により読み取られて実行されると、コントローラ104が本発明の種々の実施形態及び観点を具体化するステップ又は要素を実施するのに必要なステップを実行するようにする1つ又は2つ以上の命令を含む。本発明の実施形態を具体化するために実行されると共に制御システムの1つ又は2つ以上の特殊又は汎用コントローラによって実行されるルーチンを本明細書において「コンピュータプログラムコード」又は単に「プログラムコード」と称する。
【0052】
本明細書において説明する種々のプログラムコードをこれが本発明の特定の実施形態において具体化されるアプリケーションに基づいて識別することができる。しかしながら、理解されるべきこととして、以下の任意特定のプログラム名称集が単に便宜上用いられ、かくして、本発明は、かかる名称集により識別されると共に/或いは示唆される任意特定の用途だけにおける使用に限定されるべきではない。さらに、コンピュータプログラムをルーチン、手順、方法、モジュール、オブジェクト等に編成することができる仕方並びにプログラム機能を代表的なコンピュータ内にある種々のソフトウェア層(例えば、オペレーティングシステム、ライブラリ、API、アプリケーション、アプレット等)に割り当てることができる種々の仕方の数が一般に際限がないほど多いと仮定すると、本発明は、本明細書において説明するプログラム機能の特定の編成及び割り当てには限定されないことが理解されるべきである。
【0053】
当業者であれば理解されるように、本発明の実施形態は、非一過性コンピュータ可読プログラムコードが盛り込まれた少なくとも1つのコンピュータ可読記憶媒体に取り込まれるコンピュータプログラム製品にも具体化できる。コンピュータ可読記憶媒体は、命令実行システム、装置又はデバイスによって使用され又はこれと関連して使用されるプログラムを納め又は格納することができる電子、磁気、光学、電磁気、赤外線又は半導体システム、装置若しくはデバイス又はこれらの任意適当な組み合わせであって良い。例示のコンピュータ可読記憶媒体としては、ハードディスク、フロッピー(登録商標)ディスク、読み取り書き込み記憶装置、読み取り専用記憶装置、消去可能プログラム可能読み取り専用記憶装置、フラッシュメモリ、携帯型コンパクトディスク読み取り専用記憶装置、光学記憶装置、磁気記憶装置又はこれらの任意適当な組み合わせが挙げられるが、これらには限定されない。プロセッサに指示を出してこれが特定の仕方で、本発明の実施形態の動作を実行するよう機能するコンピュータプログラムコードを含む命令を1つ又は2つ以上のオブジェクト指向及び手順プログラミング言語で書き表すことができる。コンピュータプログラムコードは、コンピュータ可読記憶媒体から任意形式のコンピュータのプロセッサ、例えばコントローラ104のプロセッサ106に送ると、指定されているセンサデータ収集のためのコンピュータ実行プロセスの機能/行為を実施するための命令を実行するプロセッサを搭載したマシーンを製作することができる。
【0054】
オーバーラップ時間の制御
図4及び図5は、電磁弁82,84を開いて加圧空気を空気チャンバ92,96に供給するよう電磁弁82,84のそれぞれのソレノイド101,103に駆動電流として供給された電気パルス信号を示している。電磁弁82のソレノイド101が付勢状態にあるとき、電磁弁82は、空気圧力を空気チャンバ92に供給する。電磁弁82のソレノイド101が付勢状態にないとき、電磁弁82は、排気ポート58を介して空気チャンバ92を周囲圧力に向かって空気抜きし又は容積が空気圧ピストン80の運動に起因して変化すると、空気チャンバ92を周囲圧力に維持する。電磁弁84のソレノイド103が付勢状態にあるとき、電磁弁84は、空気圧力を空気チャンバ96に供給する。電磁弁84のソレノイド103が付勢状態にないとき、電磁弁84は、排気ポート72を介して空気チャンバ96を周囲圧力に向かって空気抜きする。
【0055】
図4に示されているように、射出弁10を開くために、電気パルス信号140が時刻t1で電磁弁80のソレノイド101のコイルに供給される。この第1の状態で電気パルス信号140によって付勢されている間、電磁弁82の機械弁55は、空気圧力を調整器124によって定められた圧力で空気チャンバ92に供給することができるよう切り替えられる。空気チャンバ92の加圧により、駆動ピン36及び空気圧ピストン80を第1の方向に動かし又は持ち上げてこれらを流体モジュール12から遠ざける力が生じる。以下に説明するように、これが起こると、ばね又は付勢要素68により、弁要素14は、引っ込んで弁座52から遠ざかる。空気圧ピストン80が第1の方向に持ち上げられても、電磁弁84のソレノイド103は、非付勢状態のままであり、空気チャンバ96は、電磁弁84の排気ポート72に結合される。この第2の状態では、電磁弁84は、第1の方向における空気圧ピストン80の運動により生じた空気圧力を空気チャンバ96から逃がす。
【0056】
駆動ピン36を所望の距離だけ又は所望の持続時間の間上昇させると、電気パルス信号150が時刻t2で電磁弁84のソレノイド103に供給されて電磁弁84の機械弁69を開くと共に空気供給源93からの圧縮空気を空気チャンバ96に供給する。空気チャンバ96の加圧により空気圧ピストン80に加えられる力と圧縮ばね86の力が互いに協働し、それにより駆動ピン36は、流体モジュール12に向かって下方に動き始める。しかしながら、調整器124によって定められた圧力における加圧空気は、空気チャンバ92内に残ったままである。というのは、電磁弁82のソレノイド101が依然として付勢されているからである。時刻t3において、電磁弁82のソレノイド101への電気パルス信号140の供給を中断する。非付勢状態では、電磁弁82の機械弁55は、空気チャンバ92からの空気圧力を排気ポート58経由で逃がして空気チャンバ92を周囲圧力に戻すよう切り替えられる。これにより、駆動ピン36は、迅速に流体モジュール12に向かって動いて流体モジュール12に衝突し、それにより材料の液滴を射出する。時刻t4において、電磁弁84のソレノイド103への電気パルス信号150の供給を中断する。電磁弁84の機械弁69は、そのソレノイド103の非付勢状態では、空気チャンバ96からの空気圧力を排気ポート72経由で逃がして空気チャンバ96を周囲圧力に戻すよう切り替えられる。両方のチャンバ92,96は周囲圧力状態にある場合、ばね86は、図2においてピストン80及び駆動ピン36を押さえつけて弁要素14を常閉位置では弁座52に当てた状態に維持する。
【0057】
電気パルス信号140,150は、各サイクルの全てではなく一部分にわたって、空気チャンバ92,96が同時に加圧されるようオーバーラップ状態にあるよう計時される。空気チャンバ92,96の加圧のためのオーバーラップ期間は、電気パルス信号140,150相互間の時間的一致によって定められる。パルス140について開始時刻t1及び終了時刻t3を調節すると共にパルス150について開始時刻t2及び終了時刻t4を調節することによりオーバーラップ期間を制御することができる。パルス140についての開始時刻t1は、パルス150についての開始時刻t2に先行する。パルス140についての終了時刻t3は、パルス150についての終了時刻t4に先行する。パルス150についての開始時刻t2は、パルス140についての開始時刻t1とパルス140についての終了時刻t3との間で生じるよう順序づけられる。同様に、パルス140についての開始時刻t3は、パルス150についての開始時刻t2とパルス150についての終了時刻t4との間で生じるよう順序づけられる。コントローラ104によって制御されるこれら計時(タイミング)、特にt2,t3の計時は、パルス140,150にオーバーラップを生じさせる。
【0058】
図4及び図5では明らかではないが、パルス140,150は、理想化されており、これらパルスは、当業者には理解されるように立ち上がり時間及び立ち下がり時間を有すると理解される。加うるに、時刻t1〜t4は、いずれも、コントローラ104から送り出されて電磁弁92,94によってほぼ瞬時に受け取られる瞬間的時間を表している。電磁弁82の機械弁55及び電磁弁84の機械弁69は各々、流路57,81の各々をそれぞれ切り替える作動応答時間を有している。
【0059】
図4は、時刻t2と時刻t3との間で測定された電気パルス信号140,150についてのオーバーラップ時間1として示されているオーバーラップ期間を示しており、このオーバーラップ時間1は、比較的長いオーバーラップ時間である。オーバーラップ時間1の持続時間が比較的長いと仮定すると、空気圧ピストン80が射出弁10を閉じるために下方に移動している時間の比較的大きな部分にわたって加圧状態が空気チャンバ96内に存在する。空気チャンバ92内の空気圧力は、空気圧ピストン80の下方運動に対抗し、それにより、駆動ピン36は、比較的遅い速度で動く。一般に、空気圧ピストン80の運動速度は、電気パルス信号140,150相互間の時間的オーバーラップに比例する。オーバーラップが短ければ短いほど、ピストン80は、図2において下方にそれだけ一層速く動き、オーバーラップが長ければ長いほど、ピストンは、下方にそれだけ一層遅く動くことになる。
【0060】
コントローラ104は、第1の電磁弁82を第1の期間にわたり第1の状態に保持するよう動作可能である。電磁弁82は、空気圧力が電気パルス信号140の持続時間にほぼ等しい期間にわたって空気チャンバ92に供給される第1の状態に保持される。電気パルス信号140の持続時間、それゆえ第1の期間は、時刻t1,t2相互間の期間によって定められる。コントローラ104は、第2の電磁弁84を空気圧力が電気パルス信号140の持続時間にほぼ等しい第2の期間にわたって空気チャンバ96に供給される第1の状態に保持するよう動作可能である。電気パルス信号150の持続時間、それゆえ第2の期間は、時刻t2,t4相互間の期間によって定められる。
【0061】
コントローラ104は、第1の期間(即ち、電気パルス信号140の持続時間)と第2の期間(即ち、電気パルス信号150の持続時間)との間に所定のオーバーラップ期間を維持する。駆動ピン36は、第2の期間中、弁座52に向かって動く。オーバーラップ期間は、駆動ピン36が第2の期間中、弁座52に向かって動いているとき、駆動ピン36の速度を制御するために用いられる。第2の期間中における駆動ピン36の運動により、弁要素14は、動いて弁座52に接触し、それにより材料の液滴が射出される。
【0062】
本明細書において説明している好ましい実施形態では、第2の期間中における駆動ピン36の運動により、駆動ピン36は、流体モジュール12に接触する。具体的に説明すると、接触は、上述したように可動要素60の壁62との接触である。駆動ピン36と流体モジュール12が接触することにより、弁要素14が動いて弁座52に接触し、それにより材料の液滴が射出される。
【0063】
図4に示された射出弁10の次のサイクルに関し、電気パルス信号140,150とほぼ同じであり、オーバーラップ時間1を有する電気パルス信号142,152が電磁弁82,84のソレノイド101,103に供給される。連続したサイクルが電気パルス信号140,150及び電気パルス信号142,152と同じオーバーラップ時間1で連続した電気パルス対(図示せず)によって生じ、それにより材料の液滴が順次射出される。
【0064】
図5は、時刻t2とt3との間のパルス信号140,150に関するオーバーラップ時間2によって与えられたオーバーラップ期間を示しており、このオーバーラップ時間2は、オーバーラップ時間1(図4)により与えられたオーバーラップ期間よりも持続時間が短い。図5では、駆動ピン36は、図4の場合よりも高い速度で動くことになる。というのは、空気圧ピストン80は、短い期間の場合、空気チャンバ92内の加圧条件に抗して下方に動くことになるからである。これは、図5では、電磁弁82のソレノイド103を付勢した後、空気チャンバ92が図4の場合よりも迅速に大気圧に向かって空気抜きされるからである。
【0065】
かくして、電磁弁82,84に電力を供給するパルス相互間のオーバーラップ時間を用いると、駆動ピン36及び弁要素14の速度を制御することができる。材料を射出するのに駆動ピン36が速く動かなければならない比較的濃い材料については短いオーバーラップ期間(例えば、オーバーラップ時間2)を利用するのが良い。薄い材料の場合、材料を射出したときに材料がはね散らないようにするためには駆動ピン36は、遅い速度で動かされる必要があり、かくして、長いオーバーラップ期間(例えば、オーバーラップ時間1)を利用するのが良い。
【0066】
図6は、オーバーラップ時間と粘度との相関関係を示すために2つのサンプル点を示している。点Aに関する材料の粘度は、12,500センチポアズ(25℃において)であり、この材料の場合、1ミリ秒のオーバーラップ時間が液滴の良好な射出をもたらすことが実験的に判明した。点Bに関する材料は、60,000センチポアズ(25℃において)の粘度を有する高粘度材料である。この材料の場合、0.25ミリ秒のオーバーラップ時間が良好な射出をもたらすことが実験的に判明した。多くの材料について得ることができるこの種の情報をユーザインタフェースを介して利用可能なルックアップテーブルに記憶させるのが良い。加うるに、このデータを用いると、所与の粘度の値についてオーバーラップ時間を自動的に生じさせる線、曲線又は数学公式を得ることができる。これについて以下に詳細に説明する。
【0067】
材料の粘度は、一般に、ほぼ室温である25℃において製造業者によって与えられるが、材料を射出温度まで加熱してこれら材料を射出する前にこれらの粘度を減少させることが通例であることに注目されたい。かくして、所望ならば、システムは、適当な調節が施された状態で25℃の室温における粘度ではなく、射出温度で粘度を利用するよう構成されても良い。
【0068】
駆動ピン速度制御のためのユーザインタフェース
本発明のこの説明が与えられると共にオーバーラップ時間をどのようにすれば制御できるかが与えられると、コントローラ104は、空気圧ピストン80の運動速度及びかくして弁要素14が材料の液滴を射出するために弁座52に接触するときに弁要素14がピストン80の運動によって動かされる速度を制御するようユーザがコントローラ104によって利用可能な情報を入力することができるようにするキーボード、マウス及びディスプレイを有するのが良い。
【0069】
例えば、ユーザは、射出されるべき材料に関する粘度値を入力することができる。この入力に応答して、コントローラ104内のルックアップテーブルを用いると、実験的に定められたオーバーラップ時間値を粘度値に相関させることができる。次に、このオーバーラップ時間値は、コントローラ104によって使用され、それにより電磁弁82,84を制御してこの材料にとって良好な射出をもたらす駆動ピン速さ又は速度を生じさせることができる。ルックアップテーブルの代替手段として、上述したように、実験データが曲線を辿る場合、曲線当てはめツールを使用することができ、それによりオーバーラップ時間を粘度に相関させる数学方程式を求めることができ、この公式は、コントローラによって利用され、それによりユーザによって入力された粘度値に対応したオーバーラップ期間を生じさせることができる。
【0070】
別の例として、コントローラ104は、材料粘度範囲、例えば高い粘度値に関する範囲、中程度の材料粘度(中粘度)に関する値及び低い材料粘度に関する範囲を表す一連のボタン又はパッドを備えた制御パネル又はタッチスクリーンを利用しても良い。ユーザが中粘度範囲の材料を射出する場合、ユーザは、中粘度ボタンを押すのが良い。この入力に応答して、コントローラ104は、中粘度材料について良好な射出をもたらすよう実験的に求められたオーバーラップ時間を選択する。次に、コントローラ104は、このオーバーラップ時間値を用いて電磁弁82,84を制御し、それにより所望の駆動ピン速度を生じさせる。
【0071】
さらに別の例として、コントローラ104は、ユーザにより射出される種々の材料のデータベースを有しても良い。各材料は、代表的には、射出用材料製造業者により供給されると共に各材料には製造業者による製品名、例えば製品Aが与えられている場合がある。この場合、ユーザが製品Aを用いている場合、ユーザは、コントローラ104により提供されるインタフェース中の適当なスクリーンに進むことができ、そしてドロップダウンリストを用いて製品Aを選択するのが良い。この選択に応答して、コントローラ104は、ルックアップテーブルを使用してその材料に関する実験で求められたオーバーラップ時間値を発見し、このオーバーラップ時間値を用いて電磁弁82,84を制御し、それによりこの材料に望ましい駆動ピン速度を生じさせる。
【0072】
さらに別の例として、コントローラ104は、スライダーバーを備えたインタフェースを有しても良い。ユーザがスライダーバーを一方向に動かすと、コントローラは、オーバーラップ時間を短くして駆動ピン速度を速める。ユーザがスライダーバーを逆方向に動かすと、コントローラ104は、オーバーラップ時間を長くして駆動ピン速度を遅くする。射出試験中、ユーザは、スライダーバーを用いて射出弁の駆動ピン速度を速めたり遅くしたりすることができ、そして射出試験の結果を観察することができる。これらの結果に基づいて、オペレータは、どのようなオーバーラップ時間が射出中の材料にとって最適な結果をもたらすかを経験的に求めることができ、そして製造作業においてこのオーバーラップ期間を用いることができる。ユーザも又、このようにして、ユーザが射出する各材料に関する最適なオーバーラップ時間をその製造作業の際に経験的に求めることによって自分自身のルックアップテーブルを構築することができる。別の変形例では、ユーザは、スライダーバーの位置を初期設定するためにタッチスクリーン上の高粘度、中粘度及び低粘度ボタン又はパッドを利用することができる。この場合、材料が適正に射出されず、これとは異なり、ノズル上に堆積する場合、ユーザは、適正な射出が達成されるまでオーバーラップ時間を短くすると共に駆動ピン速度を増大させるようスライディングスケールを調節するのが良い。これとは逆に、スライダーバーの初期位置により、材料のはね散りが基板上で生じる場合且つ/或いは材料の小さな衛星状液滴が生じる場合、スライダーバーを用いて適正な射出が達成されるまでオーバーラップ時間を長くすると共に駆動ピン速度を減少させるのが良い。次に、良好な射出に関するオーバーラップ時間の読みを記録し、メモリに記憶させ、そして製造作業に用いるのが良い。
【0073】
さらに別の実施形態では、基板上の1つの場所で用いられる1つのオーバーラップ時間/駆動ピン速度で材料の液滴を射出したり材料の別の液滴を射出するために基板上の別の場所で用いられる別のオーバーラップ時間/駆動ピン速度で材料の液滴を射出したりするよう射出弁が基板を横切ってロボットにより動かされている間、オーバーラップ時間及びかくして駆動ピン速度を「オン・ザ・フライ(on the fly)」で変更することができる。
【0074】
本発明がどのように作用するかについての上述の説明が与えられると、これら発明を実施するために多くの発明性のあるシステム及び方法を採用することができる。
【0075】
空気圧射出装置の弁速度を制御するためのユーザインタフェースを備えたシステム
本発明に従って材料を射出する一システムでは、射出装置は、材料の液滴を射出するために弁座に接触し弁要素の運動を生じさせる空気圧ピストンを有し、コントローラは、ユーザが弁要素の速度を変化させることができるようにするユーザインタフェースを有する。
【0076】
別のシステムでは、射出装置は、ピストンの互いに反対側に設けられていて、独立電磁弁によって制御される上側及び下側ピストンチャンバを有し、弁要素の速度は、電磁弁の制御によって制御される。
【0077】
別のシステムでは、電磁弁は、圧縮空気が上側ピストンチャンバと下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間をもたらすよう制御される。
【0078】
弁速度ユーザインタフェースを有する空気圧作動式射出装置からの射出方法
本発明に従って材料を射出する一方法では、射出装置は、弁要素が動いて弁座に接触して材料の液滴を射出するようにする空気圧駆動式ピストンを有し、弁要素の速度を変化させるようコントローラによって用いられる情報をユーザが入力するために使用できるユーザインタフェースが設けられる。
【0079】
別の方法では、ユーザ入力は、射出装置から射出されるべき材料に関連している。
【0080】
別の方法では、ユーザ入力は、材料の粘度に関連している。
【0081】
別の方法では、射出装置は、空気圧作動式であり、この射出装置は、ピストンの互いに反対側に設けられたチャンバに供給される圧縮空気によって往復動するピストンに固定された駆動ピンを有し、駆動ピンの運動により、弁要素が動いて流体チャンバ内の弁座に接触し、それにより流体チャンバと流体連通状態にあるノズルオリフィスから材料の液滴を射出し、弁を、まず最初に、弁要素が弁座に押し付けられた状態の閉鎖位置に維持し、次に、時刻T1では、ピストンの一方の側のチャンバを圧縮空気供給源に連結し、それによりピストン、駆動ピン及び弁要素を引っ込めて弁座から遠ざけて流体材料が弁座内に流れることができるようにし、T1後の時刻T2では、ピストンの反対側のチャンバを圧縮空気供給源に連結してピストン、駆動ピン及び弁要素を弁座に向かって動かし、T2後の時刻T3では、第1のチャンバを圧縮空気供給源から切り離して第1のチャンバ内の圧力を逃がすことができるようにし、そしてT3後の時刻T4では、第2のチャンバを圧縮空気供給源から切り離して第2のチャンバ内の圧力を逃がすことができるようにし、T2,T3相互間の期間は、第1のチャンバと第2のチャンバの両方が圧縮空気供給源に連結されるオーバーラップ期間となり、オーバーラップ期間の持続時間は、駆動ピンが弁座に向かって動いている間に駆動ピンの速度を制御するよう選択される。
【0082】
別の方法では、短い持続時間のオーバーラップ期間が第1の粘度を有する材料を射出するために利用され、長い持続時間のオーバーラップ期間が第2の粘度を有する材料を射出するために利用され、第1の粘度は、第2の粘度よりも低い。
【0083】
別の方法では、ユーザが情報をコントローラに入力するために用いることができるユーザインタフェースが設けられ、コントローラは、ユーザによって入力された情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0084】
別の方法では、ユーザは、材料に関する情報を入力し、コントローラは、ユーザによって入力されたその情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0085】
別の方法では、ユーザは、材料粘度に関する情報を入力し、コントローラは、ユーザによって入力されたその情報を利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0086】
別の方法では、オーバーラップ期間の持続時間を材料の粘度に相関させるデータが格納され、コントローラは、ユーザによって入力された情報及び格納されたデータを利用して駆動ピン速度を制御するオーバーラップ期間を生じさせる。
【0087】
別の方法では、ユーザインタフェースのところでユーザから入力された形式の情報をオーバーラップ期間の情報に相関させる数学公式がコントローラに記憶され、この公式は、所望のオーバーラップ期間を生じさせるようユーザにより入力された情報に応答してコントローラによって利用される。
【0088】
別の方法では、ユーザがオーバーラップ期間を短くし、それにより駆動ピン速度を増大させ又はオーバーラップ時間を長くし、それにより駆動ピン速度を減少させることができるようにするスライダーバーがユーザインタフェースに設けられる。
【0089】
別の方法では、材料の特性、例えば粘度範囲に対応したボタン又はタッチパッドがユーザインタフェースに設けられる。すると、ユーザは、ボタン又はタッチパッドを用いて射出されるべき材料に最も適した範囲を選択し、コントローラは、メモリから、その粘度範囲で最も良く働くよう経験的に求められたオーバーラップ時間を検索により取り出し、そしてこのオーバーラップ期間を用いて材料を射出させる。
【0090】
別の方法では、ユーザは、ボタン又はタッチパッドを用いて、この場合、射出されるべき材料に最も適した範囲を選択し、コントローラは、メモリから、その粘度範囲で最も良く働くよう経験的に求められたオーバーラップ時間を検索により取り出し、スライダーバーを設定してそのオーバーラップ時間を用い、それにより材料を射出させる。この場合、ユーザは、スライダーバーを用いて駆動ピン速度を速めたり遅くしたりし、そして材料にとって最適な射出をもたらす駆動ピン速度/オーバーラップ時間を記録することによってより最適なオーバーラップ時間を探し求める。次に、駆動ピン速度/オーバーラップ時間値を製造作業において利用する。
【0091】
例えば「垂直」、「水平」等のような本明細書における記載は、基準系を定めるために例示として行われており、本発明を限定するものではない。当業者であれば理解されるように、本発明の実施形態を説明する目的で種々の他の基準系を用いることができ、これは均等範囲に属する。
【0092】
理解されるように、或る要素が別の要素に「取り付けられ」、「連結され」、又は「結合され」ていると説明されている場合、この要素は、他の要素に直接連結され又は結合されても良く、これとは異なり、1つ又は2つ以上の介在要素が存在しても良い。これとは対照的に、或る要素が別の要素に「直接取り付けられ」、「直接連結され」、又は「直接結合され」ていると説明されている場合、介在する要素は存在しない。或る要素が別の要素に「間接的に取り付けられ」、「間接的に連結され」、又は「間接的に結合され」ていると説明されている場合、少なくとも1つの介在要素が存在している。
【0093】
本明細書で用いられている用語は、特定の実施形態を説明する目的のために過ぎず、本発明を限定するものではない。原文明細書において用いられている単数形“a”、“an”及び“the”は、文脈上明示の別段の指定がなければ、複数をも含む。さらに理解されるように、“comprises ”及び/又は“comprising”という用語が原文明細書において用いられている場合、言明した特徴、整数、ステップ、動作、要素及び/又はコンポーネントの存在を指定しているが、1つ又は2つ以上の他の特徴、整数、ステップ、動作、要素、コンポーネント及び/又はこれらの群の存在又は追加を排除するものではない。さらに、“includes”、“having”、“has”、“with”、“composing”又はこれらの変形語が原文明細書の詳細な説明又は原文特許請求の範囲に用いられている場合、かかる用語は、非限定的用語“comprising”とほぼ同様に包括的であるものとみなされる。
【0094】
本発明を種々の実施形態の説明によって説明すると共にこれら実施形態をかなり詳細に説明したが、添付の特許請求の範囲に記載された本発明の範囲をかかる詳細に制限し又は何らかの仕方で限定することは、本出願人の意図ではない。追加の利点及び改造例が当業者には容易に明らかであろう。かくして、それゆえに、本発明はその広い観点において特定の細部、代表的な装置及び方法並びに図示すると共に説明した例示には限定されない。したがって、本出願人の全体的な発明の技術的思想の精神又は範囲から逸脱することなく、かかる細部の変形例を案出することができる。
【符号の説明】
【0095】
10 射出弁又はジェッティングバルブ
12 流体モジュール
14 弁要素
16 電空式アクチュエータ
18 外側カバー
20 流体インタフェース
22 注入器又はシリンジ
28 ノズル
30 モジュール本体
32 第3の区分又は部分
36 駆動ピン
38 流体チャンバ
40 第1の区分又は部分
45 第2の区分又は部分
63 インサート
76 ヒータ
80 空気圧ピストン
82,84 電磁弁
90 ピストンハウジング
92 空気ピストンチャンバ
104 コントローラ
【特許請求の範囲】
【請求項1】
流体材料供給源及び空気圧供給源用の射出弁であって、
空気圧ピストンと、前記空気圧ピストンから延びる駆動ピンとを備えた空気圧アクチュエータを有し、前記駆動ピンは、前記空気圧ピストンによって動かされ、
第1のチャンバ及び第2のチャンバを備えたハウジングを有し、前記空気圧ピストンは、前記第1のチャンバと前記第2のチャンバとの間に収納され、
前記空気圧供給源に連結された第1の電磁弁を有し、前記第1の電磁弁は、前記空気圧ピストン及び前記駆動ピンを第1の方向に動かすために第1の力を前記空気圧ピストンに加えるよう空気圧力が前記第1のチャンバに供給される第1の状態を有し、前記第1の電磁弁は、前記第1の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有し、
前記空気圧供給源に連結された第2の電磁弁を有し、前記第2の電磁弁は、前記空気圧ピストン及び前記駆動ピンを第2の方向に動かすために第2の力を前記空気圧ピストンに加えるよう空気圧力が前記第2のチャンバに供給される第1の状態を有し、前記第2の電磁弁は、前記第2の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有し、
弁座及び弁要素を収納した流体チャンバを有し、前記弁要素は、前記弁座と接触関係をなす位置まで動くことができ、
流れ通路及び小出しオリフィスを備えたノズルを有し、前記流れ通路は、前記弁座と流体連通状態にあり、
前記第1の電磁弁を第1の期間にわたり前記第1の状態に保持し、前記第2の電磁弁を第2の期間にわたり前記第1の状態に保持するよう動作可能なコントローラを有し、前記第2の期間の開始は、前記第1の期間の開始に続き、前記コントローラは、前記第1の期間と前記第2の期間との間に所定のオーバーラップ期間を維持し、前記駆動ピンは、前記第2の期間中、前記弁座に向かって動き、前記オーバーラップ期間は、前記駆動ピンが前記第2の期間中、前記弁座に向かって動いているときに前記駆動ピンの速度を制御するために利用され、前記第2の期間中における前記駆動ピンの運動により、前記弁要素は、動いて前記弁座に接触する、射出弁。
【請求項2】
前記流体チャンバを含む流体モジュールを更に有し、
前記第2の期間中における前記駆動ピンの運動により、前記駆動ピンは、前記流体モジュールに接触し、前記駆動ピンと前記流体モジュールの接触により、前記弁要素は、動いて前記弁座に接触する、請求項1記載の射出弁。
【請求項3】
前記流体モジュール内に設けられた弾性部材を更に有し、前記弾性部材は、前記弁要素を付勢して該弁要素を前記弁座から離すよう構成されている、請求項2記載の射出弁。
【請求項4】
前記ハウジングは、ばね付勢力を前記空気圧ピストンに及ぼすばねを含む、請求項1記載の射出弁。
【請求項5】
前記ばねは、前記第1のチャンバに供給された圧縮空気によって前記空気圧ピストンが前記第1の方向に動かされるときに圧縮され、前記ばねは、前記第2のチャンバに供給された圧縮空気によって前記空気圧ピストンが前記第2の方向に動かされるときに拡張される、請求項4記載の射出弁。
【請求項6】
前記弁要素を動かして前記弁座に接触させるたびに、前記ノズルオリフィスを通って材料の液滴が射出される、請求項1記載の射出弁。
【請求項7】
材料を射出するシステムであって、
前記材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させるピストンを備えた空気圧射出装置を有し、
ユーザインタフェースを備えたコントローラを有し、前記ユーザインタフェースにより、ユーザは、前記弁要素の速度を変えることができ、
前記射出装置は、前記ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、前記上側及び前記下側ピストンチャンバは、独立電磁弁によって制御され、前記弁要素の速度は、前記コントローラによる前記電磁弁の制御によって制御される、システム。
【請求項8】
前記電磁弁は、圧縮空気が前記上側ピストンチャンバと前記下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供するよう制御される、請求項7記載のシステム。
【請求項9】
材料の液滴を基板上に射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧駆動ピストンを有し、前記射出装置は、前記ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、前記上側及び前記下側ピストンチャンバは、独立電磁弁によって制御され、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
ユーザが前記弁要素の速度を変えるよう用いることができるユーザインタフェースを用意するステップと、
前記ユーザインタフェースにおける前記ユーザからの入力を受け取るステップと、
前記電磁弁を制御して圧縮空気が前記上側ピストンチャンバと前記下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供することによって前記弁要素の速度を制御するよう前記入力を使用するステップとを有する、方法。
【請求項10】
前記ユーザから入力を受け取る前記ステップは、前記射出装置から射出されるべき材料に関する入力を受け取るステップを含む、請求項9記載の方法。
【請求項11】
前記ユーザから入力を受け取る前記ステップは、前記材料の粘度に関する入力を受け取るステップを含む、請求項10記載の方法。
【請求項12】
前記入力を用いて前記弁要素の速度を制御する前記ステップは、前記弁要素を前記弁座に接触させるよう動かす速度を制御するよう前記入力を使用するステップを含む、請求項9記載の方法。
【請求項13】
前記弁要素の速度を制御するよう前記入力を使用する前記ステップは、前記ユーザインタフェースにおいて前記ユーザから入力された形式の情報をオーバーラップ期間情報に相関させるルックアップテーブルに情報を記憶させるステップと、前記ユーザにより入力された情報に応答して前記情報にアクセスして前記所望のオーバーラップ期間を提供するステップとを含む、請求項12記載の方法。
【請求項14】
前記弁要素の速度を制御するよう前記入力を使用する前記ステップは、前記ユーザインタフェースにおいての前記ユーザからの入力の形式の情報を前記オーバーラップ期間情報に相関させる数学公式を記憶するステップと、前記ユーザによって入力された前記情報に応答して前記数学公式を利用して前記所望のオーバーラップ期間を提供するステップとを含む、請求項12記載の方法。
【請求項15】
コントローラを介して射出装置の駆動ピンの速度を制御することによって空気圧作動式射出装置から液滴を射出させる方法であって、前記駆動ピンは、ピストンに固定され、前記ピストンは、前記ピストンの上方及び下方に配置された第1の空気チャンバ及び第2の空気チャンバに供給される圧縮空気によって往復動し、第1の方向における前記駆動ピンの運動により、前記駆動ピンは、駆動ピン速度で流体チャンバの弁座に向かって動いて、前記流体チャンバ内の弁要素が前記弁座に当たって、前記流体チャンバと流体連通状態にあるノズルオリフィスを介して材料の液滴を射出し、前記ピストン及び前記駆動ピンを前記第1の方向とは逆の第2の方向に動かすことにより、前記弁要素は、前記弁座から引っ込んで離れることができ、前記方法は、
a)前記弁要素が前記弁座に押し付けられた状態で前記弁を閉鎖位置に維持するステップと、
b)前記弁を前記閉鎖位置に維持した後、前記ピストンの一方の側に位置した前記第1のチャンバを時刻T1で圧縮空気源に連結して、前記ピストン、前記駆動ピン及び前記弁要素を前記第1の方向に動かし、前記弁要素を前記弁座から引っ込んで離すことができ、流体材料を前記弁座中に流すことができるようにするステップと、
c)時刻T1後の時刻T2において、前記ピストンの反対側に位置した前記第2のチャンバを圧縮空気供給源に連結して、前記ピストン、前記駆動ピン及び前記弁要素を前記弁座に向かって前記第1の方向に動かすステップと、
d)時刻T2後の時刻T3において、前記第1のチャンバを前記圧縮空気供給源から切り離して前記第1のチャンバ内の圧力を逃がすことができるようにするステップと、
e)前記時刻T3後の時刻T4において、前記第2のチャンバを前記圧縮空気供給源から切り離して前記第2のチャンバ内の圧力を逃がすことができるようにするステップとを有し、時刻T2と時刻T3との間の期間は、前記第1のチャンバと前記第2のチャンバの両方が圧縮空気供給源に連結されるオーバーラップ期間を含み、前記オーバーラップ期間の持続時間は、前記駆動ピンが前記弁座に向かって前記第1の方向に動いている間に前記駆動ピンの駆動ピン速度を制御するよう利用される、方法。
【請求項16】
より短い持続時間のオーバーラップ期間が第1の粘度を有する材料を射出するために利用され、より長い持続時間のオーバーラップ期間が第2の粘度を有する材料を射出するために利用され、前記第1の粘度は、前記第2の粘度よりも低い、請求項15記載の方法。
【請求項17】
ユーザがコントローラに情報を入力するために用いることができるユーザインタフェースを用意するステップと、
前記ユーザにより入力された情報を前記コントローラにおいて受け取るステップと、
前記ユーザにより入力された前記情報に応答して前記コントローラを介して前記駆動ピン速度を制御する前記オーバーラップ期間を制御するステップとを更に有する、請求項15記載の方法。
【請求項18】
前記ユーザは、前記材料に関する情報を入力し、前記コントローラは、前記ユーザにより入力された前記情報を利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項16記載の方法。
【請求項19】
前記ユーザは、前記材料粘度に関する情報を入力し、前記コントローラは、前記ユーザにより入力された前記情報を利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項18記載の方法。
【請求項20】
オーバーラップ期間の持続時間を材料粘度に相関させるデータを格納するステップを更に有し、前記コントローラは、前記ユーザにより入力された前記情報及び前記格納されたデータを利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項19記載の方法。
【請求項21】
前記ユーザインタフェースは、前記ユーザが前記オーバーラップ期間を短くし、それにより駆動ピン速度を増大させ、或いは、前記オーバーラップ期間を長くし、それにより駆動ピン速度を減少させることができるようにするスライダーバーを含む、請求項17記載の方法。
【請求項22】
前記ユーザインタフェースは、第1の粘度範囲に対応した第1の作動要素と、第2の粘度範囲に対応した第2の作動要素とを含み、前記ユーザが前記第1の作動要素を作動させると、前記コントローラは、メモリから前記第1の粘度範囲に関するオーバーラップ期間を読み出し、該オーバーラップ期間を使用して駆動ピン速度を制御する、請求項17記載の方法。
【請求項23】
前記作動要素は、タッチスクリーン上のタッチパッドである、請求項22記載の方法。
【請求項24】
前記ユーザインタフェースは、第1の粘度範囲に対応した第1の作動要素と、第2の粘度範囲に対応した第2の作動要素とを含み、前記ユーザが前記第1の作動要素を作動させると、前記コントローラは、メモリから前記第1の粘度範囲に関するオーバーラップ期間を読み出し、該オーバーラップ期間を使用して駆動ピン速度を制御し、前記ユーザは、次に、前記スライダーバーを使用して前記オーバーラップ期間を短くし、それにより駆動ピン速度を増大させ、或いは、前記オーバーラップ期間を長くし、それにより駆動ピン速度を減少させる、請求項21記載の方法。
【請求項25】
基板上に材料の液滴を射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するためにアクチュエータにより往復動する駆動ピンを有し、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
前記射出装置の前記駆動ピンの速度を変化させることができるユーザインタフェースを用意するステップと、
射出されるべき前記材料に関連づけられた前記ユーザインタフェースでの入力を受け取るステップと、
該入力を使用して前記駆動ピンの速度を制御するステップとを有する、方法。
【請求項26】
前記入力は、前記材料の粘度に関連づけられている、請求項25記載の方法。
【請求項27】
前記入力は、2つ又は3つ以上の粘度範囲の間のユーザによる選択を含む、請求項26記載の方法。
【請求項28】
前記入力は、前記材料をその製品名によって識別する、請求項25記載の方法。
【請求項29】
基板上に材料の液滴を射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するためにアクチュエータにより往復動する駆動ピンを有し、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
前記ユーザが前記弁要素の速度を所定の範囲内で選択することができるようにするユーザインタフェースを用意するステップと、
前記ユーザによって選択された速度に基づいて前記ユーザからの入力を受け取るステップと、
該入力を使用して前記弁要素の速度を制御するステップとを有する、方法。
【請求項30】
前記ユーザは、前記ユーザインタフェースを利用して材料を種々の駆動ピン速度で射出し、それにより前記材料を射出する上で最適な駆動ピン速度を決定する、請求項29記載の方法。
【請求項1】
流体材料供給源及び空気圧供給源用の射出弁であって、
空気圧ピストンと、前記空気圧ピストンから延びる駆動ピンとを備えた空気圧アクチュエータを有し、前記駆動ピンは、前記空気圧ピストンによって動かされ、
第1のチャンバ及び第2のチャンバを備えたハウジングを有し、前記空気圧ピストンは、前記第1のチャンバと前記第2のチャンバとの間に収納され、
前記空気圧供給源に連結された第1の電磁弁を有し、前記第1の電磁弁は、前記空気圧ピストン及び前記駆動ピンを第1の方向に動かすために第1の力を前記空気圧ピストンに加えるよう空気圧力が前記第1のチャンバに供給される第1の状態を有し、前記第1の電磁弁は、前記第1の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有し、
前記空気圧供給源に連結された第2の電磁弁を有し、前記第2の電磁弁は、前記空気圧ピストン及び前記駆動ピンを第2の方向に動かすために第2の力を前記空気圧ピストンに加えるよう空気圧力が前記第2のチャンバに供給される第1の状態を有し、前記第2の電磁弁は、前記第2の空気チャンバが周囲圧力まで空気抜きされる第2の状態を有し、
弁座及び弁要素を収納した流体チャンバを有し、前記弁要素は、前記弁座と接触関係をなす位置まで動くことができ、
流れ通路及び小出しオリフィスを備えたノズルを有し、前記流れ通路は、前記弁座と流体連通状態にあり、
前記第1の電磁弁を第1の期間にわたり前記第1の状態に保持し、前記第2の電磁弁を第2の期間にわたり前記第1の状態に保持するよう動作可能なコントローラを有し、前記第2の期間の開始は、前記第1の期間の開始に続き、前記コントローラは、前記第1の期間と前記第2の期間との間に所定のオーバーラップ期間を維持し、前記駆動ピンは、前記第2の期間中、前記弁座に向かって動き、前記オーバーラップ期間は、前記駆動ピンが前記第2の期間中、前記弁座に向かって動いているときに前記駆動ピンの速度を制御するために利用され、前記第2の期間中における前記駆動ピンの運動により、前記弁要素は、動いて前記弁座に接触する、射出弁。
【請求項2】
前記流体チャンバを含む流体モジュールを更に有し、
前記第2の期間中における前記駆動ピンの運動により、前記駆動ピンは、前記流体モジュールに接触し、前記駆動ピンと前記流体モジュールの接触により、前記弁要素は、動いて前記弁座に接触する、請求項1記載の射出弁。
【請求項3】
前記流体モジュール内に設けられた弾性部材を更に有し、前記弾性部材は、前記弁要素を付勢して該弁要素を前記弁座から離すよう構成されている、請求項2記載の射出弁。
【請求項4】
前記ハウジングは、ばね付勢力を前記空気圧ピストンに及ぼすばねを含む、請求項1記載の射出弁。
【請求項5】
前記ばねは、前記第1のチャンバに供給された圧縮空気によって前記空気圧ピストンが前記第1の方向に動かされるときに圧縮され、前記ばねは、前記第2のチャンバに供給された圧縮空気によって前記空気圧ピストンが前記第2の方向に動かされるときに拡張される、請求項4記載の射出弁。
【請求項6】
前記弁要素を動かして前記弁座に接触させるたびに、前記ノズルオリフィスを通って材料の液滴が射出される、請求項1記載の射出弁。
【請求項7】
材料を射出するシステムであって、
前記材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させるピストンを備えた空気圧射出装置を有し、
ユーザインタフェースを備えたコントローラを有し、前記ユーザインタフェースにより、ユーザは、前記弁要素の速度を変えることができ、
前記射出装置は、前記ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、前記上側及び前記下側ピストンチャンバは、独立電磁弁によって制御され、前記弁要素の速度は、前記コントローラによる前記電磁弁の制御によって制御される、システム。
【請求項8】
前記電磁弁は、圧縮空気が前記上側ピストンチャンバと前記下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供するよう制御される、請求項7記載のシステム。
【請求項9】
材料の液滴を基板上に射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するために弁要素を動かしてこれを弁座に接触させる空気圧駆動ピストンを有し、前記射出装置は、前記ピストンの互いに反対側に設けられた上側ピストンチャンバ及び下側ピストンチャンバを有し、前記上側及び前記下側ピストンチャンバは、独立電磁弁によって制御され、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
ユーザが前記弁要素の速度を変えるよう用いることができるユーザインタフェースを用意するステップと、
前記ユーザインタフェースにおける前記ユーザからの入力を受け取るステップと、
前記電磁弁を制御して圧縮空気が前記上側ピストンチャンバと前記下側ピストンチャンバの両方に同時に供給される所望のオーバーラップ期間を提供することによって前記弁要素の速度を制御するよう前記入力を使用するステップとを有する、方法。
【請求項10】
前記ユーザから入力を受け取る前記ステップは、前記射出装置から射出されるべき材料に関する入力を受け取るステップを含む、請求項9記載の方法。
【請求項11】
前記ユーザから入力を受け取る前記ステップは、前記材料の粘度に関する入力を受け取るステップを含む、請求項10記載の方法。
【請求項12】
前記入力を用いて前記弁要素の速度を制御する前記ステップは、前記弁要素を前記弁座に接触させるよう動かす速度を制御するよう前記入力を使用するステップを含む、請求項9記載の方法。
【請求項13】
前記弁要素の速度を制御するよう前記入力を使用する前記ステップは、前記ユーザインタフェースにおいて前記ユーザから入力された形式の情報をオーバーラップ期間情報に相関させるルックアップテーブルに情報を記憶させるステップと、前記ユーザにより入力された情報に応答して前記情報にアクセスして前記所望のオーバーラップ期間を提供するステップとを含む、請求項12記載の方法。
【請求項14】
前記弁要素の速度を制御するよう前記入力を使用する前記ステップは、前記ユーザインタフェースにおいての前記ユーザからの入力の形式の情報を前記オーバーラップ期間情報に相関させる数学公式を記憶するステップと、前記ユーザによって入力された前記情報に応答して前記数学公式を利用して前記所望のオーバーラップ期間を提供するステップとを含む、請求項12記載の方法。
【請求項15】
コントローラを介して射出装置の駆動ピンの速度を制御することによって空気圧作動式射出装置から液滴を射出させる方法であって、前記駆動ピンは、ピストンに固定され、前記ピストンは、前記ピストンの上方及び下方に配置された第1の空気チャンバ及び第2の空気チャンバに供給される圧縮空気によって往復動し、第1の方向における前記駆動ピンの運動により、前記駆動ピンは、駆動ピン速度で流体チャンバの弁座に向かって動いて、前記流体チャンバ内の弁要素が前記弁座に当たって、前記流体チャンバと流体連通状態にあるノズルオリフィスを介して材料の液滴を射出し、前記ピストン及び前記駆動ピンを前記第1の方向とは逆の第2の方向に動かすことにより、前記弁要素は、前記弁座から引っ込んで離れることができ、前記方法は、
a)前記弁要素が前記弁座に押し付けられた状態で前記弁を閉鎖位置に維持するステップと、
b)前記弁を前記閉鎖位置に維持した後、前記ピストンの一方の側に位置した前記第1のチャンバを時刻T1で圧縮空気源に連結して、前記ピストン、前記駆動ピン及び前記弁要素を前記第1の方向に動かし、前記弁要素を前記弁座から引っ込んで離すことができ、流体材料を前記弁座中に流すことができるようにするステップと、
c)時刻T1後の時刻T2において、前記ピストンの反対側に位置した前記第2のチャンバを圧縮空気供給源に連結して、前記ピストン、前記駆動ピン及び前記弁要素を前記弁座に向かって前記第1の方向に動かすステップと、
d)時刻T2後の時刻T3において、前記第1のチャンバを前記圧縮空気供給源から切り離して前記第1のチャンバ内の圧力を逃がすことができるようにするステップと、
e)前記時刻T3後の時刻T4において、前記第2のチャンバを前記圧縮空気供給源から切り離して前記第2のチャンバ内の圧力を逃がすことができるようにするステップとを有し、時刻T2と時刻T3との間の期間は、前記第1のチャンバと前記第2のチャンバの両方が圧縮空気供給源に連結されるオーバーラップ期間を含み、前記オーバーラップ期間の持続時間は、前記駆動ピンが前記弁座に向かって前記第1の方向に動いている間に前記駆動ピンの駆動ピン速度を制御するよう利用される、方法。
【請求項16】
より短い持続時間のオーバーラップ期間が第1の粘度を有する材料を射出するために利用され、より長い持続時間のオーバーラップ期間が第2の粘度を有する材料を射出するために利用され、前記第1の粘度は、前記第2の粘度よりも低い、請求項15記載の方法。
【請求項17】
ユーザがコントローラに情報を入力するために用いることができるユーザインタフェースを用意するステップと、
前記ユーザにより入力された情報を前記コントローラにおいて受け取るステップと、
前記ユーザにより入力された前記情報に応答して前記コントローラを介して前記駆動ピン速度を制御する前記オーバーラップ期間を制御するステップとを更に有する、請求項15記載の方法。
【請求項18】
前記ユーザは、前記材料に関する情報を入力し、前記コントローラは、前記ユーザにより入力された前記情報を利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項16記載の方法。
【請求項19】
前記ユーザは、前記材料粘度に関する情報を入力し、前記コントローラは、前記ユーザにより入力された前記情報を利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項18記載の方法。
【請求項20】
オーバーラップ期間の持続時間を材料粘度に相関させるデータを格納するステップを更に有し、前記コントローラは、前記ユーザにより入力された前記情報及び前記格納されたデータを利用して前記駆動ピン速度を制御する前記オーバーラップ期間を生じさせる、請求項19記載の方法。
【請求項21】
前記ユーザインタフェースは、前記ユーザが前記オーバーラップ期間を短くし、それにより駆動ピン速度を増大させ、或いは、前記オーバーラップ期間を長くし、それにより駆動ピン速度を減少させることができるようにするスライダーバーを含む、請求項17記載の方法。
【請求項22】
前記ユーザインタフェースは、第1の粘度範囲に対応した第1の作動要素と、第2の粘度範囲に対応した第2の作動要素とを含み、前記ユーザが前記第1の作動要素を作動させると、前記コントローラは、メモリから前記第1の粘度範囲に関するオーバーラップ期間を読み出し、該オーバーラップ期間を使用して駆動ピン速度を制御する、請求項17記載の方法。
【請求項23】
前記作動要素は、タッチスクリーン上のタッチパッドである、請求項22記載の方法。
【請求項24】
前記ユーザインタフェースは、第1の粘度範囲に対応した第1の作動要素と、第2の粘度範囲に対応した第2の作動要素とを含み、前記ユーザが前記第1の作動要素を作動させると、前記コントローラは、メモリから前記第1の粘度範囲に関するオーバーラップ期間を読み出し、該オーバーラップ期間を使用して駆動ピン速度を制御し、前記ユーザは、次に、前記スライダーバーを使用して前記オーバーラップ期間を短くし、それにより駆動ピン速度を増大させ、或いは、前記オーバーラップ期間を長くし、それにより駆動ピン速度を減少させる、請求項21記載の方法。
【請求項25】
基板上に材料の液滴を射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するためにアクチュエータにより往復動する駆動ピンを有し、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
前記射出装置の前記駆動ピンの速度を変化させることができるユーザインタフェースを用意するステップと、
射出されるべき前記材料に関連づけられた前記ユーザインタフェースでの入力を受け取るステップと、
該入力を使用して前記駆動ピンの速度を制御するステップとを有する、方法。
【請求項26】
前記入力は、前記材料の粘度に関連づけられている、請求項25記載の方法。
【請求項27】
前記入力は、2つ又は3つ以上の粘度範囲の間のユーザによる選択を含む、請求項26記載の方法。
【請求項28】
前記入力は、前記材料をその製品名によって識別する、請求項25記載の方法。
【請求項29】
基板上に材料の液滴を射出するシステムにおいて、前記システムは、射出装置及びコントローラを有し、前記射出装置は、材料の液滴を射出するためにアクチュエータにより往復動する駆動ピンを有し、前記射出装置から材料の液滴を射出させる方法であって、前記方法は、
前記ユーザが前記弁要素の速度を所定の範囲内で選択することができるようにするユーザインタフェースを用意するステップと、
前記ユーザによって選択された速度に基づいて前記ユーザからの入力を受け取るステップと、
該入力を使用して前記弁要素の速度を制御するステップとを有する、方法。
【請求項30】
前記ユーザは、前記ユーザインタフェースを利用して材料を種々の駆動ピン速度で射出し、それにより前記材料を射出する上で最適な駆動ピン速度を決定する、請求項29記載の方法。
【図1A】


【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【図1B】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−44434(P2013−44434A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−185552(P2012−185552)
【出願日】平成24年8月24日(2012.8.24)
【出願人】(391019120)ノードソン コーポレーション (150)
【氏名又は名称原語表記】NORDSON CORPORATION
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成24年8月24日(2012.8.24)
【出願人】(391019120)ノードソン コーポレーション (150)
【氏名又は名称原語表記】NORDSON CORPORATION
【Fターム(参考)】
[ Back to top ]