
可視光を利用した正射投影画像取得システム。

【課題】可視レーザー光の照射によって照射ポイントを非接触で測量し、3次元座標情報を得ることにより、大型土木構造物たる撮影対象物の正射投影画像を簡易に形成するシステム、さらには、一連の画像処理技術を用いた計測システムを提供する。
【解決手段】3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、照射により形成された複数の可視光照射点における3次元座標値を既知の3次元座標値を利用して取得し、3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、測量面の正射投影画像を取得してなる。
【解決手段】3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、照射により形成された複数の可視光照射点における3次元座標値を既知の3次元座標値を利用して取得し、3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、測量面の正射投影画像を取得してなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば、トンネル施工における切羽面の測量や調査、観察に使用される 残像効果を有する可視光を利用した正射投影画像取得システムに関するものである。
ここで、可視光は、肉眼に入射して直接に視感覚を起こすことができる放射を指標し、約400nmから700nmの波長をもつものである。一般に可視レーザー光が使用される。
【背景技術】
【0002】
特開2006-79521号公開公報に見られるように、座標情報に対応するRGB値を取得して前記撮影対象物の正射投影画像を形成するいわゆる正射投影画像の撮影システムは、従来から存在していた。
しかしながら、この手法を、あらかじめその寸法が既知である雑誌や机ではなく、大型土木構造物、例えば山の法面あるいはトンネル切羽面などに適用しようとする場合、いわゆる3次元座標情報の取得のために、前記大型土木構造物に3次元座標を持った特異点5、例えば測量用プリズムなどを複数個取り付け、さらにその特異点5に3次元座標値を持たせるための測量を行わなければならないものであった。
しかして、この様な作業は、山の法面やトンネル切羽面などにおいては、きわめて高所での作業となり、作業時間、作業の安全性の面で課題があった。
【特許文献1】特開2006−79521号公開公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
かくして、本発明は前記従来の課題に対処すべく創案されたものであって、撮影画像中の特異点5の構成については、必ずしも物や物体で構成する必要は全くなく、可視でき、またカメラに撮影できればよいとの点に着目し、可視光あるいは残像効果を有する可視光、例えば可視レーザー光の照射によって特異点5を測量面、ひいては撮影した画像中に形成し、その照射ポイント(特異点5)を非接触で測量し、3次元座標情報を得ることにより、大型土木構造物たる撮影対象物の正射投影画像を簡易に形成するシステムさらには、一連の画像処理技術を用いた計測システムを提供することをものである.
特に、大型土木構造物を撮影した画像中に、前記3次元座標を持った特異点5を、非接触で、しかも短時間で、さらに安全に作成することができる点、また、中心投影画像から正射投影画像に変換処理を行うことに対しても、いわゆる特異点5を複数個設けたほうがより精度よく変換できるが、かかる特異点5の個数の増減も、いわゆる残像効果を有する可視光、例えば可視レーザー光を照射するスポット数を増減させるのみで可能となる。
その結果として画像計測における安全性、作業性、計測精度を従来よりいや増して向上させることが出来るものとなった。
【課題を解決するための手段】
【0004】
本発明は、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光照射点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光残像点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光照射点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光残像点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
前記可視光は、可視レーザー光である、
ことを特徴とし、
または、
前記測量面は、大型土木構造物に存する、
ことを特徴とし、
または、
前記大型土木構造物は、山の法面、トンネルの切羽面である、
ことを特徴とするものである。
【発明の効果】
【0005】
本発明による可視光を利用した正射投影画像取得システムであれば、
撮影画像中の特異点5の構成については、必ずしも物や物体で構成する必要は全くなく、可視できるもので、またカメラに撮影できればよいとの点に着目し、可視光あるいは残像効果を有する可視光、例えば可視レーザー光の照射によって特異点5を測量面、ひいては撮影した画像中に形成し、その照射ポイント(特異点5)を非接触で測量し、3次元座標情報を得ることにより、大型土木構造物たる撮影対象物の正射投影画像を簡易に形成するシステムさらには、一連の画像処理技術を用いた計測システムを構築することが出来る。
【0006】
特に、大型土木構造物を撮影した画像中に、前記3次元座標を持った特異点5を、非接触で、しかも短時間で、さらに安全に作成することができる点、また、中心投影画像から正射投影画像に変換処理を行うことに対しても、いわゆる特異点5を複数個設けたほうがより精度よく変換できるが、かかる特異点5の個数の増減も、いわゆる残像効果を有する可視光、例えば可視レーザー光を照射するスポット数を増減させるのみで可能となる。
その結果として画像計測における安全性、作業性、計測精度を従来よりいや増して向上させることが出来るとの優れた効果を奏する。
【発明を実施するための最良の形態】
【0007】
ここで、本発明において使用される可視光は、いわゆる可視できるものであればよく、例えば電灯のような器具を使用して可視光形成してもかまわないものである。さらに、電灯でなくとも、光を発射でき、測量面に可視照射点が形成できるものであればよい。
上記を踏まえ、以下に本発明を図に示す最良の実施の態様に基づいて説明する。
【0008】
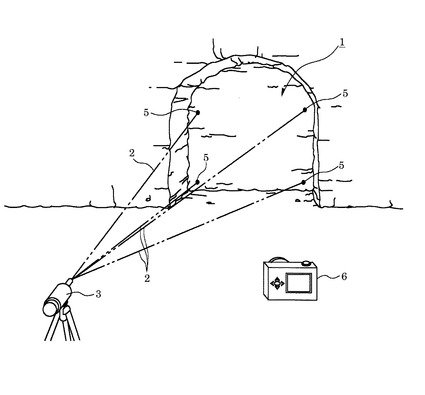
まず、各図から理解されるように、可視レーザー光発射器3を一台用意する。しかし、このレーザー照射器3は、例えば二軸の鏡にて高速に駆動し、複数箇所に同時に発射できるものが好ましい。
そして、この一台の可視レーザー光発射器3により、例えばトンネルの切羽面1に向かって可視レーザー光2が複数方向に向けて同時に発射される。
すなわち、可視レーザー光2は一般に残像効果を有するものとされており、本件発明者らは、可視レーザー光2が残像効果を有することに着目し、前記トンネル切羽面1の外側面に同時に複数照射し、その残像効果により複数の特異点5が残存形成される特徴を本発明の根幹としたのである。
【0009】
なお、可視光は残像効果を有するものでなくともよいのであるが、その場合はいわゆる可視光発射器を例えば4台用意する必要がある。
この場合、前記した電灯を簡単な可視光発射器として使用してもよく、4台の電灯で測量面を照射し、4つの可視照射点を形成することが考えられる。
この様に、撮影画像中に形成する特異点5の構成については、当該特異点5(一般に基準点と称してもよい)は、必ずしも製品や物体で構成する必要は全くなく、もって作業者は現場において、すなわち山の法面4やトンネルの切羽面1などに実際に製品や物体によって複数の特異点5を構築する必要がないものである。
【0010】
よって、測量対象物が特に大型土木構築物たる山の法面4やトンネルの切羽面1の場合に、本発明はきわめて大きな効果を有すると言わざるを得ない。
すなわち、前記特異点5は可視でき、その箇所に留まって存在でき、またカメラに撮影できればよいのである。
【0011】
しかして、可視光あるいは残像効果を有する可視光、例えば可視レーザー光2の照射によって複数の特異点5・・・を前記山の法面4やトンネルの切羽面1などの測量面、ひいてはそれを撮影した画像中に形成し、その照射ポイント(複数の特異点5)を非接触で測量して、該当する複数の特異点5の3次元座標情報(空間情報、画像情報)を得ることにより、たとえ大型土木構造物たる山の法面4やトンネルの切羽面1など撮影対象物であっても、その正射投影画像を簡易に形成しうるのである。
【0012】
そして、この様に形成された前記複数の特異点5は、いわゆる図9などに示される式などに必要な3次元座標値が明確にされているものであり、大型土木構造物のある現場で実際に複数の特異点5における3次元座標値を測定する必要がないのである。
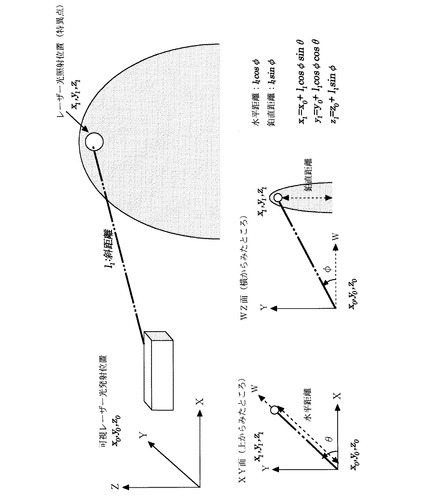
すなわち、可視レーザー光2を発射する可視レーザー光発射器3の発射位置と発射角度、さらには可視レーザー光2の照射位置までの距離がわかれば、各々複数の特異点5の3次元座標値が算出できるのである(図8参照)。
【0013】
なお、残像効果を有しない可視光を使用する場合には、例えば4台の可視光発射器のそれぞれの発射位置と発射角度、さらには可視レーザー光2の照射位置までの距離がわかっていることが必要となる。
これも本発明の大きな特徴であり、大型土木構造物たる山の法面4やトンネルの切羽面1など実際の現場においていちいち実際に3次元座標値を計測する必要がなく、きわめて安全に、かつ簡単に3次元座標値が計測できるのである。
【0014】
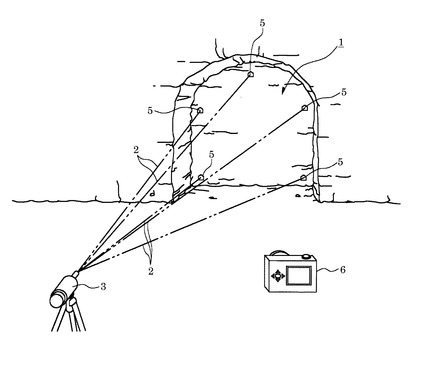
また、可視レーザー光2によって複数の特異点5を形成するに際し、該可視レーザー光2の照射パターン、換言すれば、同時に複数の特異点5に照射する照射パターンの形状などは各種簡単に設定が行えるものであり、図2に示すようにトンネル切羽面1の外周側に間隔をあけて例えば5箇所、形状としては五角形状に照射する照射パターンを決定するなどが考えられる。
例えば、この様な照射パターンで複数の特異点5を形成しておくと、画像に取り込んで前記特異点5を認識する際など、予め前記のような五角形状で特異点5が散らばって形成されている旨を、例えばパソコン内の処理ソフトに入力、記憶させておけば、きわめてスムーズかつ迅速に複数の特異点5を自動認識させることができるものとなる。
【0015】
そして、例えばこの五角形状に配置された複数特異点5の3次元座標値の演算などその後の処理が効率的に行え、きわめてスムーズに正射投影画像への変換作業などを進めることが出来ることとなる。
また、照射する可視レーザー光2の照射形状(測量面に残像として映し出された特異点5の外形状)も各種形状を選択して設定することが出来、これにより各種の照射形状を測量面に残像として映し出すことができ、もって特異点5として容易に認識出来るよう形成出来るのである。
【0016】
この場合も、予め特異点5の外形状を前記の形状として正射投影画像処理等の作業の際にその処理ソフトに入力しておくと、例えば画像に取り込んで前記複数の特異点5を認識する際、きわめてスムーズかつ迅速に自動認識させることが出来、この複数特異点5の3次元座標値の演算などその後の処理が効率的に行え、きわめてスムーズに作業を進めることが出来るのである。
なお、照射する可視レーザー光2の色彩を各種選択し、複数特異点5の色につき、予め特異点5は指定された色彩で形成されている旨を例えばパソコン内の処理ソフトに入力、記憶させておくこともでき、これにより、測量面における他の色彩との差別化を容易にし、もって特異点5の自動認識を簡単に、スムーズにすることも出来る。
【0017】
この様に、本発明では、例えば大型土木構造物たる山の法面4やトンネルの切羽面1に照射した、いわゆる残像する照射点をその箇所における3次元座標値を算出する特異点5として構成し、その後の正射投影画像作成の第1ステップとするものである。
【0018】
しかして、本発明の実施状態を以下に簡単に説明しておく。
まず、例えば、トンネル掘削工事現場の入り口や掘削途中の坑内に、可視レーザー発射器3を設置する。
前記の通り、可視レーザー光2は二軸の鏡にて高速に駆動することができ、複数の箇所に同時に照射でき、その照射した複数箇所に残像として存置できるものとする。また、可視レーザー光2は、測距機能(可視レーザー光2を発射した位置から照射位置までの距離が計測できる機能)を有するものが好ましい。
そして、可視レーザー光2が発射された角度と、前記測定された前記可視レーザー光2を発射した位置から照射位置までの距離の値によって、可視レーザー照射点(複数の特異点5)の3次元座標値が容易に計測できるのである(図8参照)。
【0019】
まず、大型土木構造物たる山の法面4やトンネルの切羽面1の複数所定箇所に可視レーザー光2を照射し、当該照射点(複数の特異点5)の3次元座標値(空間座標置)を測定しておく(図8参照)。
次いで、好ましくはデジタルカメラ6で、前記複数の特異点5を写し込んで、例えば山の法面4やトンネルの切羽面1を撮影する。
すると、撮影画像の中に写し込まれた可視レーザー光2の照射点(複数の特異点5)は、いわゆる解析ソフトによって、その3次元座標値(画像座標値)が自動認識され、スムーズに演算されるものとなる(図8乃至図11の計算式参照)。
【0020】
しかして、画像中に写し込まれ、3次元座標値(空間座標値、画像座標値)が各々明確とされた可視レーザー光2による特異点5により前記長身投影画像である撮影画像を正射投影画像にスムーズに変換処理出来るのである(図8乃至図11の計算式参照)。
【0021】
ところで、データ処理用のパソコンによって、いわゆるRGB値に関連付けられた、例えば岩質区分などの情報を自動認識できるものとなり、この境界情報がいわゆる三次元座標データベース内に登録可能となる。
【0022】
なお、画像上で前記の境界情報などが不鮮明な場合は、正射投影画像に変換された画像上において地質境界線と思われる箇所をマウスなどでクリック、あるいはドラッグすることによりいわゆる境界情報を鮮明なものとし、前記と同様に境界情報などをいわゆる三次元座標データベースに登録することが可能となる。その結果、地質縦断図、横断図等を自動作成することも出来る。
さらに、可視レーザー光2による特異点5の座標情報と、掘削断面の形状とを比較することにより、断面の余掘り、アタリデータなどを得ることもできる。また、処理された画像を使用した画像計測により内空変位測定もできる。
【0023】
この様に、すべてのデータを三次元座標データベース化することが出来るため、測定情報と施工情報(計画断面、支保)などを一括して表示し、例えば施工会議や岩質判定会議の際のプレゼンテーション資料、説明資料として活用できることとなる。
近年、トンネル施工の現場において、トンネル切羽面1の測量・観察がよく行われており、またその測量、観察が重要視されているのが実情である。
何故なら前記トンネル切羽面1の不連続面情報あるいは地質境界の位置情報を得ることが、トンネルの安全な施工を行う際のきわめて大切な情報となってきているからである。
【0024】
しかしながら、従来は、いわゆる点の測量に留まるものであり、不連続面の検出や地質境界の位置情報を詳細に検出、測量するには膨大な回数の測量が必要だったのである。
また、従来より、トンネル切羽面1を写真撮影し、この写真から不連続面や地質境界の位置を把握することも行われていたが、正確に前記の不連続面や地質境界の位置を把握、測量することはできないものであったのである。
このため、簡単にトンネル切羽面1の不連続面や地質境界を正確に把握できるいわゆる測量システムの提供が要望されていたのである。
【0025】
すなわち、従来のいわゆるトータルステーションのような点の測量(特開2004−138422号公開公報参照)では、トンネル切羽面1などの全体を把握するために膨大な回数の測量が必要であり、経済的にも、時間的にも測量が困難だったからである。
【0026】
本発明は、まずこの様なデジタルカメラ6で撮影された中心投影画像を、簡単な作業で正射投影画像に変換し、当該変換した、いわゆる実物と相似する正射投影画像を利用して、例えば、トンネル切羽面1における不連続面や地質境界の把握を容易にし、当該正射投影画像からトンネル切羽面1の不連続面や地質境界の測量を可能としたものである。
【0027】
図1では、トンネル切羽面1に向かい、まず4点の特異点5を形成すべく所定の可視レーザー光2を発射し、これにより当該特異点5がトンネル切羽面1上に写る様構成される。
次いで、前記4つの特異点5を含めてデジタルカメラ6により、トンネル切羽面1を撮影する。
ここで、デジタルカメラ6によるトンネル切羽面1の撮影画像は図1などに示すような中心投影画像となる。しかして、このような中心投影画像では、遠近感のある画像となり、いわゆる実物と相似する正射投影画像でないため、トンネル切羽面1における不連続面や地質境界の把握が正確に行えない。従ってトンネル切羽面1の不連続面や地質境界の正確な測量をも出来ないものとなる。
【0028】
トンネル開口側の真正面からデジタルカメラ6にてトンネル切羽面1を撮影すればよいとの意見があるが、真正面から撮影しても、得られる画像は中心投影画像であり、トンネル開口部の幅方向に遠近感が生じてしまう。
従って、トンネル開口部の真正面から撮影した中心投影画像でも本発明によって正射投影画像に変換しなければ、トンネル切羽面1における不連続面や地質境界の把握が正確に行えない。従ってトンネル切羽面1の不連続面や地質境界の正確な測量をも出来ない。
【0029】
次に、デジタルカメラ6で撮影した中心投影画像から正射投影画像への変換につき述べる。
なお、コンピュータを使用して、デジタルカメラ6で撮影した中心投影画像から正射投影画像へ変換する画像処理を行うには、前記デジタルカメラ6の撮影位置(X、Y、Z)、デジタルカメラ6の姿勢(カメラの回転角度)や焦点距離(c)が、前記4点の特異点5における3次元座標値が不明な場合には、必要となる。
【0030】
これらの数値が把握され明らかであれば、これらの値によって中心投影画像から正射投影画像へ変換するコンピュータ及び処理ソフトを使用して画像処理が行え、変換した正射投影画像をディスプレイ上に表示して、トンネル切羽面1の不連続面や地質境界の正確な測量がおこなえることとなる。
さらに、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値が明確になっていれば、これらの値をも使用して、より正確な正射投影画像を取得でき、正確な測量、観察が行える。
【0031】
しかし、前記デジタルカメラ6の撮影位置(X、Y、Z)、姿勢(カメラの回転角度)や焦点距離(c)の数値が不明のときは、前記4つの特異点5の既知である3次元座標値、すなわち空間座標(X、Y)及び画像座標(x、y)のそれぞれの値を使用して、前記デジタルカメラ6の撮影位置(X、Y、Z)、姿勢(カメラの回転角度)や焦点距離(c)の数値を明確にすることが出来るのである。
それらの3次元座標値などがきわめて簡単に本発明によって計測できることはすでに述べたとおりである。
【0032】
ここで、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の数値をあらかじめ把握するよりも、前記4つの特異点5の空間座標(X、Y)及び画像座標(x、y)の数値を把握、かかる値を使用する方が容易といえる。
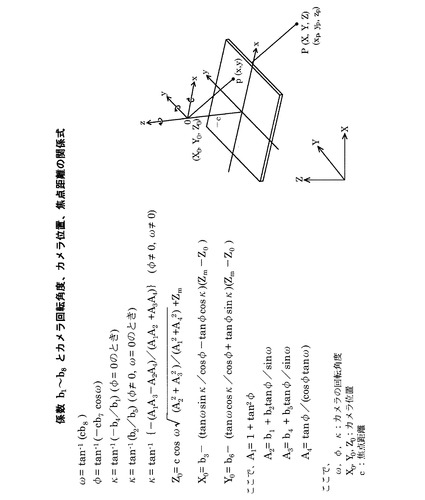
その関係式を図9の(1)、(2)、(3)、(4)に示す。かかる図9に示す関係式により、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の数値が明確になる。
【0033】
すなわち、図1に示すように、トンネル切羽面1上に写された4つの特異点5については、それぞれの3次元座標値、すなわち空間座標(X、Y)の値と画像座標(x、y)の値があらかじめ把握しておけばよい。そして、これらの4つの特異点5の値を図9に示す4つの式(1)、(2)、(3)、(4)にそれぞれ導入し、これによりトンネル切羽面1に対するデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の係数(b1ないしb8)を求めるのである。
【0034】
なお、この際、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値については、明らかにされていることが好ましい。
しかし、これらの値がたとえ明確でなくとも、正射投影画像の取得は可能ではある。
ついで、求められた前記係数(b1ないしb8)を、図10に示す、係数(b1ないしb8)とデジタルカメラの撮影位置(X、Y、Z)、姿勢(カメラの回転角度)、焦点距離(c)との関係式に導入すると、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)が求まるものとなる。
【0035】
しかして、求められたデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の係数(b1ないしb8)、そしてデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の値と図9及び図10の関係式によって解析し、もって中心投影画像から正射投影画像へ変換する画像処理が行うのである。
【0036】
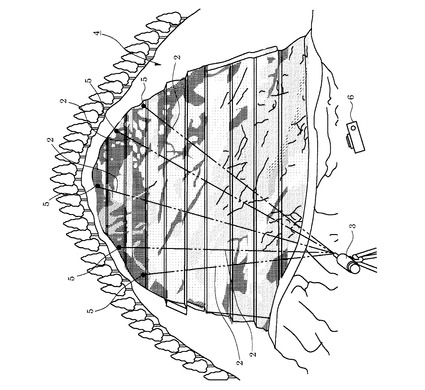
しかして、図4にトンネル切羽面1につき、中心投影画像から正射投影画像に変換した説明図を示す。
そして、変換した正射投影画像をコンピュータのディスプレイ上に表示し、トンネル切羽面1の不連続面や地質境界の測量をもおこなえるのである。
【0037】
ところで、前記特異点5をトンネルの切羽面1に4つ以上、できれば少なくとも9つ形成して正射投影画像を取得することも考えられる。
すなわち、より詳細な、またより正確な正射投影画像の取得に際しては、前述したように、デジタルカメラ6のレンズのゆがみ等内部標定要素をも考慮しなければならない。従って、前記実施例のように特異点5が4つ設けられている場合には、基本的にカメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値について、明らかにされていることが好ましいのである。
【0038】
しかし、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値がわかっていない場合には、前記特異点5をトンネルの切羽面1上に少なくとも9つ以上設ける。本発明では可視レーザー光発射器3の使用により、3次元座標値がわかっている特異点5を9つ形成することは容易である。
そして、9つの特異点5の3次元座標値、すなわち空間座標の値と画像座標の値により、デジタルカメラ6のレンズのゆがみ等内部標定要素をも求めることが出来るからである。そして、これらの9つの値が解れば、より詳細な、またより正確な正射投影画像が取得出来るからである。
【0039】
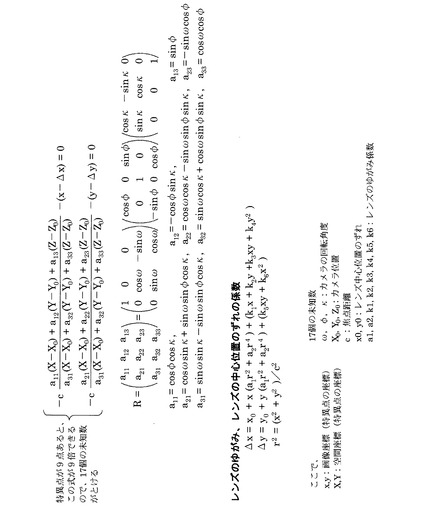
すなわち、図11に示す関係式に前記9つの特異点5の空間座標及び画像座標のそれぞれの値を導入すれば、カメラの回転角度、カメラ位置、焦点距離のほかレンズ中心位置のずれ、レンズのゆがみ係数など17個の未知数が解けるものとなる。
そして、最終的により詳細な、またより正確な正射投影画像が取得出来ることになる。
より詳細な、またより正確な正射投影画像が取得出来ることにより、トンネル切羽面1における不連続面、地質境界の把握がさらに正確に行え、トンネル切羽面1の不連続面や地質境界のさらに正確な測量が行えるのである。
【0040】
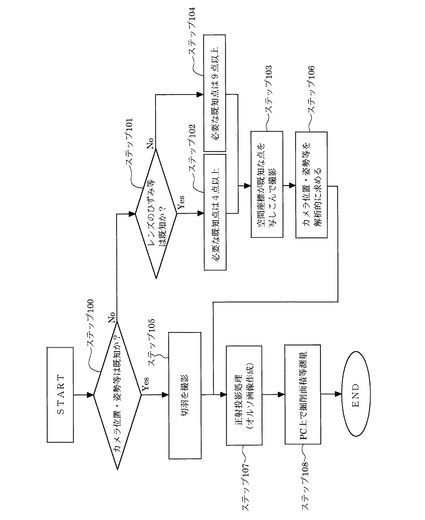
図7に本発明を簡単に説明したフローを示す。
まず、デジタルカメラ6のカメラ位置や姿勢は既知か否かが判断される(ステップ100)。ここで、デジタルカメラ6のカメラ位置や姿勢などが把握されておらず、既知でないとき(ステップ100でNO)は、カメラレンズのひずみ等が既知か否かが判断される(ステップ101)。そして、カメラレンズのひずみ等が既知である場合(ステップ101でYES)は、空間座標(X、Y)が既知な4つ、あるいは4つ以上の特異点5をトンネル切羽面1上に形成し(ステップ102)、該特異点5を写し込んで写真撮影が行われる(ステップ103)。
【0041】
また、カメラレンズのひずみ等が既知でない場合(ステップ101でNO)は、空間座標(X、Y)が既知な9つ、あるいは9つ以上の特異点5をトンネル切羽面1上に形成し(ステップ104)、該特異点5を写し込んで写真撮影が行われる(ステップ103)。
その後、4つ以上あるいは9つ以上の特異点5のそれぞれの既知である空間座標及び画像に取り込んで明らかになった前記4つ以上あるいは9つ以上の特異点5のそれぞれの画像座標(x、y)の値を用い、前記デジタルカメラ6のカメラ位置、姿勢などを解析的に求めるのである(ステップ106)。
【0042】
その後、求められたデジタルカメラ6のカメラ位置、姿勢などの値を使用し、前記写真撮影を行ったトンネル切羽面1の中心投影画像からの正射投影画像処理(オルソ画像作成)を行う(ステップ107)。
そして、前記オルソ画像を基にパソコン上で正確な掘削面積等の測量を行うのである(ステップ108)。
【0043】
なお、デジタルカメラ6のカメラ位置や姿勢は既知か否かが判断時において(ステップ100)、ここで、デジタルカメラ6のカメラ位置や姿勢などがあらかじめ把握されており、その値が既知であるとき(ステップ100でYES)は、特異点5の形成をすることなく、また、特異点5を取り込んでの写真撮影を必要とすることなく、直ちにトンネル切羽面1の写真撮影が行得る場合もある(ステップ105)。
そして、その後、前記既知のデジタルカメラ6のカメラ位置、姿勢などの値を使用して、前記写真撮影を行ったトンネル切羽面1の中心投影画像からの正射投影画像処理(オルソ画像作成)を行い(ステップ107)、前記オルソ画像を基にパソコン上で正確な掘削面積等の測量を行えばよい(ステップ108)。
【0044】
この様に、本発明によれば現地においては現地での特異点を形成する作業等をきわめて省力化することができる。
また、山の法面4やトンネル切羽面1における不連続面や地質境界の位置などが面的に正確にわかりやすく把握できる。
【0045】
さらに、従来は数値データでの把握でしかできなかったが、本発明では画像、すなわち正射投影画像を使用するためきわめて認識しやすいものとなった。しかも、トンネル切羽面1の余堀量をも測量できることとなった。
また、蓄積された画像処理後の切羽画像(正射投影画像)はそのまま比較でき、長期的な測量、観察が行えるのである。
【産業上の利用可能性】
【0046】
本発明は、トンネル切羽面の観察・測量による地質分析やトンネル掘削の余堀量管理、さらにはトンネル内空変位計測等に幅広く応用出来る。
【図面の簡単な説明】
【0047】
【図1】本発明の概略構成を説明する概略説明図(その1)である。
【図2】本発明の概略構成を説明する概略説明図(その2)である。
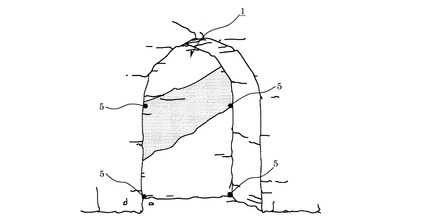
【図3】図1の実施の態様で得られた中心投影画像を説明する説明図である。
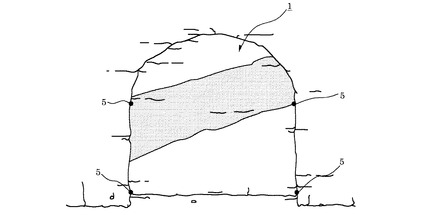
【図4】図3の中心投影画像を正射投影画像に変換した状態を説明する説明図である。
【図5】本発明の概略構成を説明する概略説明図(その3)である。
【図6】本発明の概略構成を説明する概略説明図(その4)である。
【図7】本発明のフローを説明する説明図である。
【図8】本発明で使用される関係式を示す説明図(その1)である。
【図9】本発明で使用される関係式を示す説明図(その2)である。
【図10】本発明で使用される関係式を示す説明図(その3)である。
【図11】本発明で使用される関係式を示す説明図(その4)である。
【符号の説明】
【0048】
1 トンネルの切羽面
2 可視レーザー光
3 可視レーザー発射器
4 山の法面
5 特異点
6 デジタルカメラ
【技術分野】
【0001】
本発明は、例えば、トンネル施工における切羽面の測量や調査、観察に使用される 残像効果を有する可視光を利用した正射投影画像取得システムに関するものである。
ここで、可視光は、肉眼に入射して直接に視感覚を起こすことができる放射を指標し、約400nmから700nmの波長をもつものである。一般に可視レーザー光が使用される。
【背景技術】
【0002】
特開2006-79521号公開公報に見られるように、座標情報に対応するRGB値を取得して前記撮影対象物の正射投影画像を形成するいわゆる正射投影画像の撮影システムは、従来から存在していた。
しかしながら、この手法を、あらかじめその寸法が既知である雑誌や机ではなく、大型土木構造物、例えば山の法面あるいはトンネル切羽面などに適用しようとする場合、いわゆる3次元座標情報の取得のために、前記大型土木構造物に3次元座標を持った特異点5、例えば測量用プリズムなどを複数個取り付け、さらにその特異点5に3次元座標値を持たせるための測量を行わなければならないものであった。
しかして、この様な作業は、山の法面やトンネル切羽面などにおいては、きわめて高所での作業となり、作業時間、作業の安全性の面で課題があった。
【特許文献1】特開2006−79521号公開公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
かくして、本発明は前記従来の課題に対処すべく創案されたものであって、撮影画像中の特異点5の構成については、必ずしも物や物体で構成する必要は全くなく、可視でき、またカメラに撮影できればよいとの点に着目し、可視光あるいは残像効果を有する可視光、例えば可視レーザー光の照射によって特異点5を測量面、ひいては撮影した画像中に形成し、その照射ポイント(特異点5)を非接触で測量し、3次元座標情報を得ることにより、大型土木構造物たる撮影対象物の正射投影画像を簡易に形成するシステムさらには、一連の画像処理技術を用いた計測システムを提供することをものである.
特に、大型土木構造物を撮影した画像中に、前記3次元座標を持った特異点5を、非接触で、しかも短時間で、さらに安全に作成することができる点、また、中心投影画像から正射投影画像に変換処理を行うことに対しても、いわゆる特異点5を複数個設けたほうがより精度よく変換できるが、かかる特異点5の個数の増減も、いわゆる残像効果を有する可視光、例えば可視レーザー光を照射するスポット数を増減させるのみで可能となる。
その結果として画像計測における安全性、作業性、計測精度を従来よりいや増して向上させることが出来るものとなった。
【課題を解決するための手段】
【0004】
本発明は、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光照射点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光残像点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光照射点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光残像点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とし、
または、
前記可視光は、可視レーザー光である、
ことを特徴とし、
または、
前記測量面は、大型土木構造物に存する、
ことを特徴とし、
または、
前記大型土木構造物は、山の法面、トンネルの切羽面である、
ことを特徴とするものである。
【発明の効果】
【0005】
本発明による可視光を利用した正射投影画像取得システムであれば、
撮影画像中の特異点5の構成については、必ずしも物や物体で構成する必要は全くなく、可視できるもので、またカメラに撮影できればよいとの点に着目し、可視光あるいは残像効果を有する可視光、例えば可視レーザー光の照射によって特異点5を測量面、ひいては撮影した画像中に形成し、その照射ポイント(特異点5)を非接触で測量し、3次元座標情報を得ることにより、大型土木構造物たる撮影対象物の正射投影画像を簡易に形成するシステムさらには、一連の画像処理技術を用いた計測システムを構築することが出来る。
【0006】
特に、大型土木構造物を撮影した画像中に、前記3次元座標を持った特異点5を、非接触で、しかも短時間で、さらに安全に作成することができる点、また、中心投影画像から正射投影画像に変換処理を行うことに対しても、いわゆる特異点5を複数個設けたほうがより精度よく変換できるが、かかる特異点5の個数の増減も、いわゆる残像効果を有する可視光、例えば可視レーザー光を照射するスポット数を増減させるのみで可能となる。
その結果として画像計測における安全性、作業性、計測精度を従来よりいや増して向上させることが出来るとの優れた効果を奏する。
【発明を実施するための最良の形態】
【0007】
ここで、本発明において使用される可視光は、いわゆる可視できるものであればよく、例えば電灯のような器具を使用して可視光形成してもかまわないものである。さらに、電灯でなくとも、光を発射でき、測量面に可視照射点が形成できるものであればよい。
上記を踏まえ、以下に本発明を図に示す最良の実施の態様に基づいて説明する。
【0008】
まず、各図から理解されるように、可視レーザー光発射器3を一台用意する。しかし、このレーザー照射器3は、例えば二軸の鏡にて高速に駆動し、複数箇所に同時に発射できるものが好ましい。
そして、この一台の可視レーザー光発射器3により、例えばトンネルの切羽面1に向かって可視レーザー光2が複数方向に向けて同時に発射される。
すなわち、可視レーザー光2は一般に残像効果を有するものとされており、本件発明者らは、可視レーザー光2が残像効果を有することに着目し、前記トンネル切羽面1の外側面に同時に複数照射し、その残像効果により複数の特異点5が残存形成される特徴を本発明の根幹としたのである。
【0009】
なお、可視光は残像効果を有するものでなくともよいのであるが、その場合はいわゆる可視光発射器を例えば4台用意する必要がある。
この場合、前記した電灯を簡単な可視光発射器として使用してもよく、4台の電灯で測量面を照射し、4つの可視照射点を形成することが考えられる。
この様に、撮影画像中に形成する特異点5の構成については、当該特異点5(一般に基準点と称してもよい)は、必ずしも製品や物体で構成する必要は全くなく、もって作業者は現場において、すなわち山の法面4やトンネルの切羽面1などに実際に製品や物体によって複数の特異点5を構築する必要がないものである。
【0010】
よって、測量対象物が特に大型土木構築物たる山の法面4やトンネルの切羽面1の場合に、本発明はきわめて大きな効果を有すると言わざるを得ない。
すなわち、前記特異点5は可視でき、その箇所に留まって存在でき、またカメラに撮影できればよいのである。
【0011】
しかして、可視光あるいは残像効果を有する可視光、例えば可視レーザー光2の照射によって複数の特異点5・・・を前記山の法面4やトンネルの切羽面1などの測量面、ひいてはそれを撮影した画像中に形成し、その照射ポイント(複数の特異点5)を非接触で測量して、該当する複数の特異点5の3次元座標情報(空間情報、画像情報)を得ることにより、たとえ大型土木構造物たる山の法面4やトンネルの切羽面1など撮影対象物であっても、その正射投影画像を簡易に形成しうるのである。
【0012】
そして、この様に形成された前記複数の特異点5は、いわゆる図9などに示される式などに必要な3次元座標値が明確にされているものであり、大型土木構造物のある現場で実際に複数の特異点5における3次元座標値を測定する必要がないのである。
すなわち、可視レーザー光2を発射する可視レーザー光発射器3の発射位置と発射角度、さらには可視レーザー光2の照射位置までの距離がわかれば、各々複数の特異点5の3次元座標値が算出できるのである(図8参照)。
【0013】
なお、残像効果を有しない可視光を使用する場合には、例えば4台の可視光発射器のそれぞれの発射位置と発射角度、さらには可視レーザー光2の照射位置までの距離がわかっていることが必要となる。
これも本発明の大きな特徴であり、大型土木構造物たる山の法面4やトンネルの切羽面1など実際の現場においていちいち実際に3次元座標値を計測する必要がなく、きわめて安全に、かつ簡単に3次元座標値が計測できるのである。
【0014】
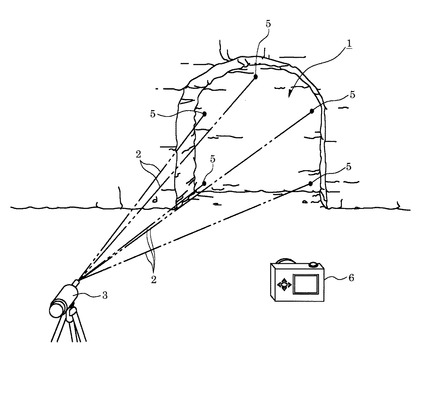
また、可視レーザー光2によって複数の特異点5を形成するに際し、該可視レーザー光2の照射パターン、換言すれば、同時に複数の特異点5に照射する照射パターンの形状などは各種簡単に設定が行えるものであり、図2に示すようにトンネル切羽面1の外周側に間隔をあけて例えば5箇所、形状としては五角形状に照射する照射パターンを決定するなどが考えられる。
例えば、この様な照射パターンで複数の特異点5を形成しておくと、画像に取り込んで前記特異点5を認識する際など、予め前記のような五角形状で特異点5が散らばって形成されている旨を、例えばパソコン内の処理ソフトに入力、記憶させておけば、きわめてスムーズかつ迅速に複数の特異点5を自動認識させることができるものとなる。
【0015】
そして、例えばこの五角形状に配置された複数特異点5の3次元座標値の演算などその後の処理が効率的に行え、きわめてスムーズに正射投影画像への変換作業などを進めることが出来ることとなる。
また、照射する可視レーザー光2の照射形状(測量面に残像として映し出された特異点5の外形状)も各種形状を選択して設定することが出来、これにより各種の照射形状を測量面に残像として映し出すことができ、もって特異点5として容易に認識出来るよう形成出来るのである。
【0016】
この場合も、予め特異点5の外形状を前記の形状として正射投影画像処理等の作業の際にその処理ソフトに入力しておくと、例えば画像に取り込んで前記複数の特異点5を認識する際、きわめてスムーズかつ迅速に自動認識させることが出来、この複数特異点5の3次元座標値の演算などその後の処理が効率的に行え、きわめてスムーズに作業を進めることが出来るのである。
なお、照射する可視レーザー光2の色彩を各種選択し、複数特異点5の色につき、予め特異点5は指定された色彩で形成されている旨を例えばパソコン内の処理ソフトに入力、記憶させておくこともでき、これにより、測量面における他の色彩との差別化を容易にし、もって特異点5の自動認識を簡単に、スムーズにすることも出来る。
【0017】
この様に、本発明では、例えば大型土木構造物たる山の法面4やトンネルの切羽面1に照射した、いわゆる残像する照射点をその箇所における3次元座標値を算出する特異点5として構成し、その後の正射投影画像作成の第1ステップとするものである。
【0018】
しかして、本発明の実施状態を以下に簡単に説明しておく。
まず、例えば、トンネル掘削工事現場の入り口や掘削途中の坑内に、可視レーザー発射器3を設置する。
前記の通り、可視レーザー光2は二軸の鏡にて高速に駆動することができ、複数の箇所に同時に照射でき、その照射した複数箇所に残像として存置できるものとする。また、可視レーザー光2は、測距機能(可視レーザー光2を発射した位置から照射位置までの距離が計測できる機能)を有するものが好ましい。
そして、可視レーザー光2が発射された角度と、前記測定された前記可視レーザー光2を発射した位置から照射位置までの距離の値によって、可視レーザー照射点(複数の特異点5)の3次元座標値が容易に計測できるのである(図8参照)。
【0019】
まず、大型土木構造物たる山の法面4やトンネルの切羽面1の複数所定箇所に可視レーザー光2を照射し、当該照射点(複数の特異点5)の3次元座標値(空間座標置)を測定しておく(図8参照)。
次いで、好ましくはデジタルカメラ6で、前記複数の特異点5を写し込んで、例えば山の法面4やトンネルの切羽面1を撮影する。
すると、撮影画像の中に写し込まれた可視レーザー光2の照射点(複数の特異点5)は、いわゆる解析ソフトによって、その3次元座標値(画像座標値)が自動認識され、スムーズに演算されるものとなる(図8乃至図11の計算式参照)。
【0020】
しかして、画像中に写し込まれ、3次元座標値(空間座標値、画像座標値)が各々明確とされた可視レーザー光2による特異点5により前記長身投影画像である撮影画像を正射投影画像にスムーズに変換処理出来るのである(図8乃至図11の計算式参照)。
【0021】
ところで、データ処理用のパソコンによって、いわゆるRGB値に関連付けられた、例えば岩質区分などの情報を自動認識できるものとなり、この境界情報がいわゆる三次元座標データベース内に登録可能となる。
【0022】
なお、画像上で前記の境界情報などが不鮮明な場合は、正射投影画像に変換された画像上において地質境界線と思われる箇所をマウスなどでクリック、あるいはドラッグすることによりいわゆる境界情報を鮮明なものとし、前記と同様に境界情報などをいわゆる三次元座標データベースに登録することが可能となる。その結果、地質縦断図、横断図等を自動作成することも出来る。
さらに、可視レーザー光2による特異点5の座標情報と、掘削断面の形状とを比較することにより、断面の余掘り、アタリデータなどを得ることもできる。また、処理された画像を使用した画像計測により内空変位測定もできる。
【0023】
この様に、すべてのデータを三次元座標データベース化することが出来るため、測定情報と施工情報(計画断面、支保)などを一括して表示し、例えば施工会議や岩質判定会議の際のプレゼンテーション資料、説明資料として活用できることとなる。
近年、トンネル施工の現場において、トンネル切羽面1の測量・観察がよく行われており、またその測量、観察が重要視されているのが実情である。
何故なら前記トンネル切羽面1の不連続面情報あるいは地質境界の位置情報を得ることが、トンネルの安全な施工を行う際のきわめて大切な情報となってきているからである。
【0024】
しかしながら、従来は、いわゆる点の測量に留まるものであり、不連続面の検出や地質境界の位置情報を詳細に検出、測量するには膨大な回数の測量が必要だったのである。
また、従来より、トンネル切羽面1を写真撮影し、この写真から不連続面や地質境界の位置を把握することも行われていたが、正確に前記の不連続面や地質境界の位置を把握、測量することはできないものであったのである。
このため、簡単にトンネル切羽面1の不連続面や地質境界を正確に把握できるいわゆる測量システムの提供が要望されていたのである。
【0025】
すなわち、従来のいわゆるトータルステーションのような点の測量(特開2004−138422号公開公報参照)では、トンネル切羽面1などの全体を把握するために膨大な回数の測量が必要であり、経済的にも、時間的にも測量が困難だったからである。
【0026】
本発明は、まずこの様なデジタルカメラ6で撮影された中心投影画像を、簡単な作業で正射投影画像に変換し、当該変換した、いわゆる実物と相似する正射投影画像を利用して、例えば、トンネル切羽面1における不連続面や地質境界の把握を容易にし、当該正射投影画像からトンネル切羽面1の不連続面や地質境界の測量を可能としたものである。
【0027】
図1では、トンネル切羽面1に向かい、まず4点の特異点5を形成すべく所定の可視レーザー光2を発射し、これにより当該特異点5がトンネル切羽面1上に写る様構成される。
次いで、前記4つの特異点5を含めてデジタルカメラ6により、トンネル切羽面1を撮影する。
ここで、デジタルカメラ6によるトンネル切羽面1の撮影画像は図1などに示すような中心投影画像となる。しかして、このような中心投影画像では、遠近感のある画像となり、いわゆる実物と相似する正射投影画像でないため、トンネル切羽面1における不連続面や地質境界の把握が正確に行えない。従ってトンネル切羽面1の不連続面や地質境界の正確な測量をも出来ないものとなる。
【0028】
トンネル開口側の真正面からデジタルカメラ6にてトンネル切羽面1を撮影すればよいとの意見があるが、真正面から撮影しても、得られる画像は中心投影画像であり、トンネル開口部の幅方向に遠近感が生じてしまう。
従って、トンネル開口部の真正面から撮影した中心投影画像でも本発明によって正射投影画像に変換しなければ、トンネル切羽面1における不連続面や地質境界の把握が正確に行えない。従ってトンネル切羽面1の不連続面や地質境界の正確な測量をも出来ない。
【0029】
次に、デジタルカメラ6で撮影した中心投影画像から正射投影画像への変換につき述べる。
なお、コンピュータを使用して、デジタルカメラ6で撮影した中心投影画像から正射投影画像へ変換する画像処理を行うには、前記デジタルカメラ6の撮影位置(X、Y、Z)、デジタルカメラ6の姿勢(カメラの回転角度)や焦点距離(c)が、前記4点の特異点5における3次元座標値が不明な場合には、必要となる。
【0030】
これらの数値が把握され明らかであれば、これらの値によって中心投影画像から正射投影画像へ変換するコンピュータ及び処理ソフトを使用して画像処理が行え、変換した正射投影画像をディスプレイ上に表示して、トンネル切羽面1の不連続面や地質境界の正確な測量がおこなえることとなる。
さらに、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値が明確になっていれば、これらの値をも使用して、より正確な正射投影画像を取得でき、正確な測量、観察が行える。
【0031】
しかし、前記デジタルカメラ6の撮影位置(X、Y、Z)、姿勢(カメラの回転角度)や焦点距離(c)の数値が不明のときは、前記4つの特異点5の既知である3次元座標値、すなわち空間座標(X、Y)及び画像座標(x、y)のそれぞれの値を使用して、前記デジタルカメラ6の撮影位置(X、Y、Z)、姿勢(カメラの回転角度)や焦点距離(c)の数値を明確にすることが出来るのである。
それらの3次元座標値などがきわめて簡単に本発明によって計測できることはすでに述べたとおりである。
【0032】
ここで、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の数値をあらかじめ把握するよりも、前記4つの特異点5の空間座標(X、Y)及び画像座標(x、y)の数値を把握、かかる値を使用する方が容易といえる。
その関係式を図9の(1)、(2)、(3)、(4)に示す。かかる図9に示す関係式により、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の数値が明確になる。
【0033】
すなわち、図1に示すように、トンネル切羽面1上に写された4つの特異点5については、それぞれの3次元座標値、すなわち空間座標(X、Y)の値と画像座標(x、y)の値があらかじめ把握しておけばよい。そして、これらの4つの特異点5の値を図9に示す4つの式(1)、(2)、(3)、(4)にそれぞれ導入し、これによりトンネル切羽面1に対するデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の係数(b1ないしb8)を求めるのである。
【0034】
なお、この際、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値については、明らかにされていることが好ましい。
しかし、これらの値がたとえ明確でなくとも、正射投影画像の取得は可能ではある。
ついで、求められた前記係数(b1ないしb8)を、図10に示す、係数(b1ないしb8)とデジタルカメラの撮影位置(X、Y、Z)、姿勢(カメラの回転角度)、焦点距離(c)との関係式に導入すると、デジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)が求まるものとなる。
【0035】
しかして、求められたデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の係数(b1ないしb8)、そしてデジタルカメラ6の撮影位置(X、Y、Z)や姿勢(カメラの回転角度)、焦点距離(c)の値と図9及び図10の関係式によって解析し、もって中心投影画像から正射投影画像へ変換する画像処理が行うのである。
【0036】
しかして、図4にトンネル切羽面1につき、中心投影画像から正射投影画像に変換した説明図を示す。
そして、変換した正射投影画像をコンピュータのディスプレイ上に表示し、トンネル切羽面1の不連続面や地質境界の測量をもおこなえるのである。
【0037】
ところで、前記特異点5をトンネルの切羽面1に4つ以上、できれば少なくとも9つ形成して正射投影画像を取得することも考えられる。
すなわち、より詳細な、またより正確な正射投影画像の取得に際しては、前述したように、デジタルカメラ6のレンズのゆがみ等内部標定要素をも考慮しなければならない。従って、前記実施例のように特異点5が4つ設けられている場合には、基本的にカメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値について、明らかにされていることが好ましいのである。
【0038】
しかし、カメラレンズのゆがみ値及びカメラレンズ中心位置のずれ値がわかっていない場合には、前記特異点5をトンネルの切羽面1上に少なくとも9つ以上設ける。本発明では可視レーザー光発射器3の使用により、3次元座標値がわかっている特異点5を9つ形成することは容易である。
そして、9つの特異点5の3次元座標値、すなわち空間座標の値と画像座標の値により、デジタルカメラ6のレンズのゆがみ等内部標定要素をも求めることが出来るからである。そして、これらの9つの値が解れば、より詳細な、またより正確な正射投影画像が取得出来るからである。
【0039】
すなわち、図11に示す関係式に前記9つの特異点5の空間座標及び画像座標のそれぞれの値を導入すれば、カメラの回転角度、カメラ位置、焦点距離のほかレンズ中心位置のずれ、レンズのゆがみ係数など17個の未知数が解けるものとなる。
そして、最終的により詳細な、またより正確な正射投影画像が取得出来ることになる。
より詳細な、またより正確な正射投影画像が取得出来ることにより、トンネル切羽面1における不連続面、地質境界の把握がさらに正確に行え、トンネル切羽面1の不連続面や地質境界のさらに正確な測量が行えるのである。
【0040】
図7に本発明を簡単に説明したフローを示す。
まず、デジタルカメラ6のカメラ位置や姿勢は既知か否かが判断される(ステップ100)。ここで、デジタルカメラ6のカメラ位置や姿勢などが把握されておらず、既知でないとき(ステップ100でNO)は、カメラレンズのひずみ等が既知か否かが判断される(ステップ101)。そして、カメラレンズのひずみ等が既知である場合(ステップ101でYES)は、空間座標(X、Y)が既知な4つ、あるいは4つ以上の特異点5をトンネル切羽面1上に形成し(ステップ102)、該特異点5を写し込んで写真撮影が行われる(ステップ103)。
【0041】
また、カメラレンズのひずみ等が既知でない場合(ステップ101でNO)は、空間座標(X、Y)が既知な9つ、あるいは9つ以上の特異点5をトンネル切羽面1上に形成し(ステップ104)、該特異点5を写し込んで写真撮影が行われる(ステップ103)。
その後、4つ以上あるいは9つ以上の特異点5のそれぞれの既知である空間座標及び画像に取り込んで明らかになった前記4つ以上あるいは9つ以上の特異点5のそれぞれの画像座標(x、y)の値を用い、前記デジタルカメラ6のカメラ位置、姿勢などを解析的に求めるのである(ステップ106)。
【0042】
その後、求められたデジタルカメラ6のカメラ位置、姿勢などの値を使用し、前記写真撮影を行ったトンネル切羽面1の中心投影画像からの正射投影画像処理(オルソ画像作成)を行う(ステップ107)。
そして、前記オルソ画像を基にパソコン上で正確な掘削面積等の測量を行うのである(ステップ108)。
【0043】
なお、デジタルカメラ6のカメラ位置や姿勢は既知か否かが判断時において(ステップ100)、ここで、デジタルカメラ6のカメラ位置や姿勢などがあらかじめ把握されており、その値が既知であるとき(ステップ100でYES)は、特異点5の形成をすることなく、また、特異点5を取り込んでの写真撮影を必要とすることなく、直ちにトンネル切羽面1の写真撮影が行得る場合もある(ステップ105)。
そして、その後、前記既知のデジタルカメラ6のカメラ位置、姿勢などの値を使用して、前記写真撮影を行ったトンネル切羽面1の中心投影画像からの正射投影画像処理(オルソ画像作成)を行い(ステップ107)、前記オルソ画像を基にパソコン上で正確な掘削面積等の測量を行えばよい(ステップ108)。
【0044】
この様に、本発明によれば現地においては現地での特異点を形成する作業等をきわめて省力化することができる。
また、山の法面4やトンネル切羽面1における不連続面や地質境界の位置などが面的に正確にわかりやすく把握できる。
【0045】
さらに、従来は数値データでの把握でしかできなかったが、本発明では画像、すなわち正射投影画像を使用するためきわめて認識しやすいものとなった。しかも、トンネル切羽面1の余堀量をも測量できることとなった。
また、蓄積された画像処理後の切羽画像(正射投影画像)はそのまま比較でき、長期的な測量、観察が行えるのである。
【産業上の利用可能性】
【0046】
本発明は、トンネル切羽面の観察・測量による地質分析やトンネル掘削の余堀量管理、さらにはトンネル内空変位計測等に幅広く応用出来る。
【図面の簡単な説明】
【0047】
【図1】本発明の概略構成を説明する概略説明図(その1)である。
【図2】本発明の概略構成を説明する概略説明図(その2)である。
【図3】図1の実施の態様で得られた中心投影画像を説明する説明図である。
【図4】図3の中心投影画像を正射投影画像に変換した状態を説明する説明図である。
【図5】本発明の概略構成を説明する概略説明図(その3)である。
【図6】本発明の概略構成を説明する概略説明図(その4)である。
【図7】本発明のフローを説明する説明図である。
【図8】本発明で使用される関係式を示す説明図(その1)である。
【図9】本発明で使用される関係式を示す説明図(その2)である。
【図10】本発明で使用される関係式を示す説明図(その3)である。
【図11】本発明で使用される関係式を示す説明図(その4)である。
【符号の説明】
【0048】
1 トンネルの切羽面
2 可視レーザー光
3 可視レーザー発射器
4 山の法面
5 特異点
6 デジタルカメラ
【特許請求の範囲】
【請求項1】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項2】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項3】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光照射点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項4】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光残像点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項5】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光照射点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項6】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光残像点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする残像効果を有する可視光を利用した正射投影画像取得システム。
【請求項7】
前記可視光は、可視レーザー光である、
ことを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5または請求項6記載の可視光を利用した正射投影画像取得システム。
【請求項8】
前記測量面は、大型土木構造物に存する、
ことを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5、請求項6または請求項7記載の可視光を利用した正射投影画像取得システム。
【請求項9】
前記大型土木構造物は、山の法面、トンネルの切羽面である、
ことを特徴とする請求項8記載の可視光を利用した正射投影画像取得システム。
【請求項1】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項2】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された複数の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された複数の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影された中心投影画像の測量画像につき、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項3】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光照射点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項4】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも4点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも4点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも4点以上の可視光残像点における3次元座標値、前記デジタルカメラ撮影におけるカメラ位置、カメラ姿勢及び焦点距離の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項5】
3次元座標値が既知の地点より、可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光照射点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光照射点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光照射点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする可視光を利用した正射投影画像取得システム。
【請求項6】
3次元座標値が既知の地点より、残像効果を備えた可視光を測量面に向かって照射すると共に、前記照射により形成された少なくとも9点の可視光残像点における3次元座標値を前記既知の3次元座標値を利用して取得し、
前記3次元座標値が取得された少なくとも9点の可視光残像点を取り込んで、デジタルカメラにて中心投影画像である測量画像を撮影してなり、
前記撮影した中心投影画像の測量画像につき、前記少なくとも9点以上の可視光残像点における3次元座標値の値を使用して、中心投影画像から正射投影画像への変換式を用いて解析し、前記測量面の正射投影画像を取得してなる、
ことを特徴とする残像効果を有する可視光を利用した正射投影画像取得システム。
【請求項7】
前記可視光は、可視レーザー光である、
ことを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5または請求項6記載の可視光を利用した正射投影画像取得システム。
【請求項8】
前記測量面は、大型土木構造物に存する、
ことを特徴とする請求項1、請求項2、請求項3、請求項4、請求項5、請求項6または請求項7記載の可視光を利用した正射投影画像取得システム。
【請求項9】
前記大型土木構造物は、山の法面、トンネルの切羽面である、
ことを特徴とする請求項8記載の可視光を利用した正射投影画像取得システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−186402(P2009−186402A)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願番号】特願2008−28648(P2008−28648)
【出願日】平成20年2月8日(2008.2.8)
【出願人】(000235543)飛島建設株式会社 (132)
【出願人】(394017446)マック株式会社 (7)
【公開日】平成21年8月20日(2009.8.20)
【国際特許分類】
【出願日】平成20年2月8日(2008.2.8)
【出願人】(000235543)飛島建設株式会社 (132)
【出願人】(394017446)マック株式会社 (7)
[ Back to top ]